FREESTAR (Fast Reaction Experiments Enabling Science, Technology, Applications & Research)
EO
Multiple direction/polarisation radiometers
Atmosphere
Atmospheric Temperature Fields
Quick facts
Overview
| Mission type | EO |
| Agency | NASA |
| Mission status | Mission complete |
| Launch date | 16 Jan 2003 |
| End of life date | 01 Feb 2003 |
| Measurement domain | Atmosphere, Gravity and Magnetic Fields |
| Measurement category | Atmospheric Temperature Fields, Aerosols, Gravity, Magnetic and Geodynamic measurements, Ozone |
| Measurement detailed | Atmospheric pressure (over sea surface), Atmospheric temperature (column/profile), Atmospheric stability index, Atmospheric pressure (over land surface) |
| Instruments | SEM |
| Instrument type | Multiple direction/polarisation radiometers, Scatterometers, Data collection, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See FREESTAR (Fast Reaction Experiments Enabling Science, Technology, Applications & Research) summary |
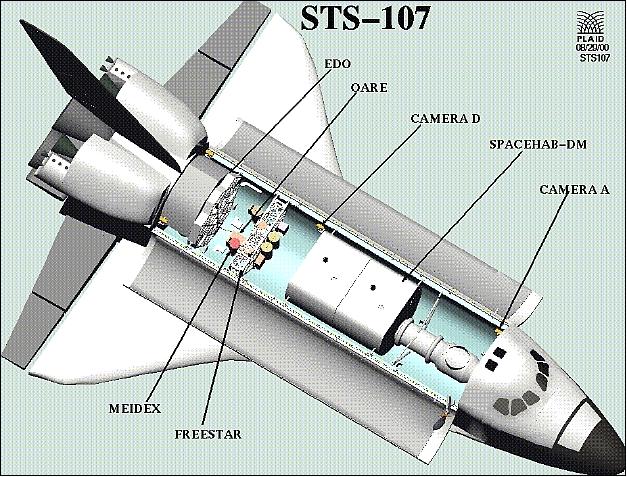
FREESTAR (Fast Reaction Experiments Enabling Science, Technology, Applications & Research) - on Shuttle Flight STS-107
The FREESTAR (Fast Reaction Experiments Enabling Science, Technology, Applications & Research) project was a complex payload flown as a Hitchhiker payload within SSPP (Shuttle Small Payloads Project) of NASA/GSFC (Goddard Space Flight Center). [The main payload on STS-107 was SPACEHAB-RDM (Research Double Module) involving 32 payloads with 59 separate investigations]. FREESTAR consisted of separate experiments and the Hitchhiker (HH) Carrier (HHC) avionics mounted on a cross-bay HH Multipurpose Equipment Support Structure (MPESS). The carrier avionics provided the interface to the electrical systems, the payload power control, and command and telemetry capabilities. The total mass of FREESTAR (pallet+payloads) was 2,000 kg.
Launch
FREESTAR was flown on Shuttle flight STS-107 (Jan. 16 -Feb. 1, 2003), a 16-day research mission. The orbit had an average altitude of 275 km and an inclination of 39º.
Note: The Shuttle research mission STS-107 (Columbia orbiter), experienced a reentry catastrophe on Feb.1, 2003, disintegrating over Texas and resulting in the tragic loss of the crew of seven astronauts. Their names are: Rick D. Husband, William C. McCool, Kalpana Chawla, David M. Brown, Michael P. Anderson, Laurel B. Clark, and Ilan Ramon. The accident resulted into the largest investigation ever by NASA, with help from many other institutions, finding clues (proof) as to the most possible causes of the accident. The Columbia tragedy has also entailed an examination of the US space program in addition to the accident investigation. -- In the grim wake of the Space Shuttle Columbia disaster, space experts, politicians and individuals debated the value of human space flight weighed against the cost in dollars and human lives.
The dedicated science mission on STS-107: Unlike most Shuttle missions that serve the International Space Station, STS-107 was a marathon scientific undertaking, with dozens of investigations ranging from tumor growth to global climate change, all work that can't be carried out on Earth (Columbia carried more than 80 experiments). Though much of the valuable data and specimens were lost in the disaster, a remarkable amount was downloaded to ground computers during the mission.
FREESTAR Payload Assessment
Although individual FREESTAR payloads experienced data loss to differing degrees, the amount of data gathered during the mission so far exceeded minimum requirements that most experiments can qualify STS-107 mission success at or near 100% despite loss of on-board data. 1) 2)
Payload | Objectives met on orbit | Science data lost | Mission objectives met (actual) |
MEIDEX | Dust: 56% | Dust: ~22% | Dust: 37% |
SOLSE | 100% | 30% LORE | ~80% (best estimate) |
SOLCON | 100% | 1% | 100% |
CVX-2 | 100% | ~10% | 100% |
LPT/CANDOS | 100% | 0% | 100% |
SEM | 100% | 100% | 50% |
Payload/Sensor Complement
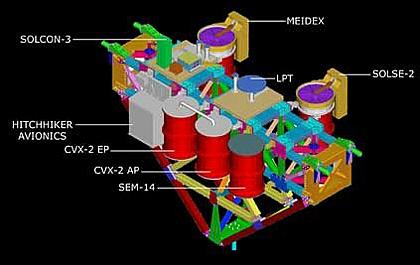
The FREESTAR configuration consisted of the following experiments/payloads: 3)
• MEIDEX (Mediterranean Israeli Dust Experiment)
• SOLSE-2 (Shuttle Ozone Limb Sounding Experiment-2) / LORE
• CVX-2 (Critical Viscosity of Xenon-2)
• SOLCON-3 (Solar Constant Experiment-3)
• LPT/CANDOS. (Low Power Transceiver / Communications and Navigation Demonstration on Shuttle)
• SEM-14 (Space Experiment Module-14)
MEIDEX (Mediterranean Israeli Dust Experiment)
MEIDEX is an experiment of The Open University, Tel Aviv, and of ISA (Israel Space Agency), Israel. The objective is to investigate the geographical variation of the optical, physical and chemical properties of desert aerosol properties, including the location and temporal variation of its sinks, sources and transport (role of desert aerosols in climate systems). 4)
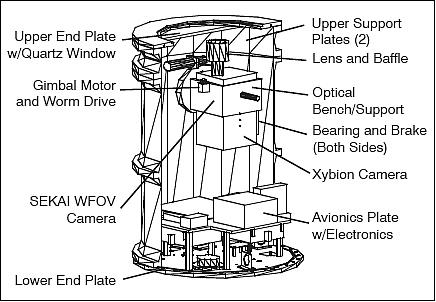
The MEIDEX instrument consists of a radiometric camera (Xybion model IMC-201, FOV=16º, a digital multispectral video camera), functioning in the 340-860 nm spectral region (with six narrow-band filters centered at 340, 380, 470, 555, 660 and 860 nm), boresighted with a second, wide-angle video camera (FOV=60º). The Xybion camera itself has a FOV of 10.7º x 14.0º. The respective FWHM of the filters in nm is: 4, 4, 30, 30, 50 and 40.
MEIDEX observes an atmospheric volume with a footprint of about 100 km x 100 km over land and sea, illuminated by solar radiation. Both cameras are mounted on a single-axis gimbaled truss located in a standard Hitchhiker (HH) canister equipped with a 12.5 cm extension ring and a HMDA (Motorized Door Assembly). The HMDA has a 40 cm quartz window. Other supporting HH equipment includes two Hitchhiker Video Interface Units (HVIUs). The MEIDEX data is recorded on a digital VCR (Video Cassette Recorder) system. 5) 6) 7) 8)
The MEIDEX payload utilizes general Orbiter services, including power, control, command, and telemetry provided through the HHC avionics equipment and control and command via the PGSC (Payload and General Support Computer). The MEIDEX video signals are provided to the HVIUs and passed via the HH Avionics into the Orbiter Closed Circuit Television (CCTV) system (two inputs). On-orbit, the MEIDEX payload is primarily operated by an Israeli Payload Specialist (PS) or a backup crew member, with alternate command and control capability available via the remote Payload Operations Control Center (POCC). - During the mission, an Israeli team conducted a field campaign (airborne measurements) in the region of interest and sampled dust particles.
MEIDEX was also used to image electrical emissions (sprites, blue jets, elves) above active thunderstorms as targets of opportunities. Sprites are jellyfish-shaped emissions that occur above thunderstorms. These and other lightning-related phenomena - like “blue jets” and “elves” - are called transient luminous events (TLEs). The MEIDEX experiment resulted in the first calibrated images of elves (coordinated observations were conducted with ground measurements in the ELF/VHF frequency range at several stations around the world). 10) 11) 12) 13) 14) 15) 16)
A portion of the MEIDEX data was downlinked during the mission. A total of more than 8 hours of video obtained during the MEIDEX mission was saved, and it includes a considerable amount of new sprite data.

SOLSE-2 (Shuttle Ozone Limb Sounding Experiment-2) / LORE
SOLSE-2 is a Hitchhiker Junior (HH-J) payload managed by GSFC [reflight of SOLSE/LORE on STS-87 (Nov. 19 - Dec. 5, 1997); PI: Richard McPeters]. The instruments were redesigned (relative to the instruments that flew on STS-87 in 1997) to focus on O3 retrievals in the lower stratosphere. The SOLSE-2 elements are: instrumentation, structural support, C&DH (Command and Data Handling), thermal control, and power subsystems.
The SOLSE/LORE-2 instrumentation on STS-107 represents a technology demonstration for OMPS (Ozone Mapper Profiler Suite), a limb scattering instrument to provide stratospheric ozone profile information on the NPOESS spacecraft series of IPO (Integrated Program Office). The main purpose of the SOLSE/LORE-2 and SAGE III limb scattering research efforts is to test the current knowledge of instrument design and retrieval algorithms for this relatively unproven technique.
SOLSE is the model for the instrument design of the OMPS limb profiler (LP) instrument, and they share many key design features (e.g., measuring a simultaneous image of all wavelengths and tangent heights). SOLSE and LORE were re-flown primarily as a risk-reduction measure for OMPS. 17) 18) 19)

The objective of SOLSE-2 is to demonstrate a new limb-viewing technique to measure the vertical distribution of ozone in the atmosphere. Utilizing a limb viewing geometry, SOLSE-2 demonstrates the feasibility of measuring limb-scattered radiation to retrieve ozone with improved vertical resolution achievable over a conventional nadir-looking instrument. In addition, SOLSE demonstrates the feasibility of using charge coupled device (CCD) technology in the UV spectral range to eliminate moving parts in simpler, cheaper, ozone-mapping instruments. The SOLSE payload performs limb and Earth-viewing observations. During limb observations, SOLSE focuses in the altitude range of 10 km to 50 km above the horizon of the Earth's surface through the daylight orbit. SOLSE records images of the atmospheric limb from 530 - 850 nm when the visible filter is in place and from 275 - 425 nm with the UV filter is in place.
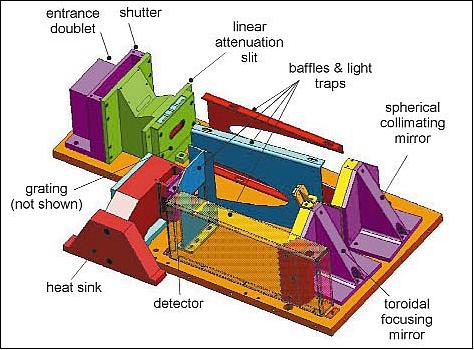
The instrumentation subsystem consists of a VIS/UV Czerny-Turner imaging spectrometer with a CCD array detector, photodiode array and visible light cameras, calibration lamp, optics and baffling. The experiment is housed in a HH canister with canister extension ring and equipped with an HMDA. The payload also consists of a HH-J interface, comprised of the HH Remote Interface Unit (HRIU) and associated LEP (Lower End Plate) electronics. The HRIU receives power from the HH avionics and communicates via the GAS intercom line with a PGSC. 20)
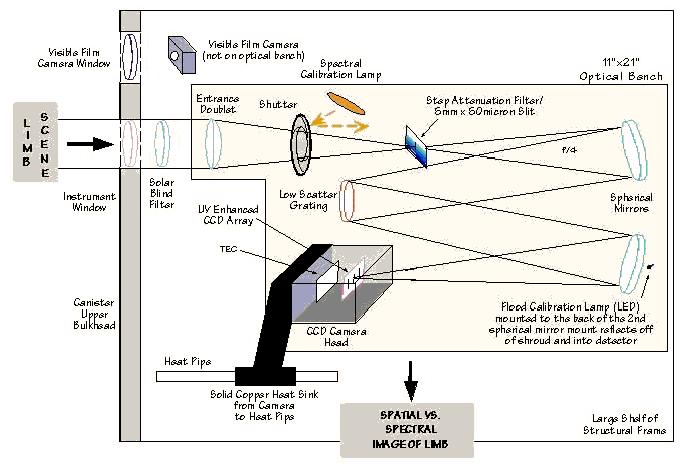
Spatial resolution | 0.8 km |
Target spatial coverage | 0-75 km above the Earth's surface |
Spectral coverage | 530-850 nm 1st order, 275-425 nm 2nd order |
Spectral resolution | 0.7 nm 1st order, 0.35 nm 2nd order |
Instrument FOV (Field of View) | 2.3º |
Telescope specifications | 3 cm diameter doublet lens from Special Optics |
Telescope focal length | 12 cm |
Telescope material | CaF, Fused Silica |
Shutter specifications | 35 mm aperture shutter from Vincent Associates |
Slit dimensions | 50 mm x 5 μm from Reynard Corporation |
Grating specifications | Holographic grating from Hyperfine |
Grating density | 300 lines/mm |
Spherical Mirror Specifications | Collimating mirror (GSFC) |
Detector specifications, array size | Back thinned CCD array from SITe, 1024 x 1024 pixels |
Detector pixel size, detector readout noise | 24 μm x 24 μm, 7 electrons per pixel |

LORE (Limb Ozone Retrieval Experiment)
LORE is a complimentary instrument (camera) to SOLSE, contributing five discrete bands up to 760 nm (PI: Ernest Hilsenrath, NASA). Numeric data from the payload, displayed on the PGSC, indicates if the proper altitude within the limb is being imaged. Earth viewing observations enable SOLSE to correlate the data with other nadir viewing, ozone monitoring instruments. Calibration measurements of the spectrograph are performed prior to and following all SOLSE observations with the HMDA in the closed position.
LORE is a small camera system that accompanies SOLSE in it's demonstration flight. The instrument is a filter radiometer consisting of a telescope, filter wheel assembly, and a linear diode detector array. It is flown in the SOLSE canister to measure the limb scattered radiance at ultraviolet and visible wavelengths. Wavelengths near 600 nm are used to measure ozone in the 15-30 km region using the Chappuis band absorption. A channel near 760 nm is being used to measure oxygen absorption, while a channel at 322 nm measures ozone above 30 km, and a third channel at 350 nm provides pointing information.
LORE is a multi-wavelength version of RSAS (Rayleigh Scattering Attitude Sensor) heritage flown on SSBUV flight 8 (STS-72, Jan. 11-20, 1996). A series of hardened interference filters are rotated sequentially into the optical path. All three visible channels overlap with SOLSE coverage. Five filters are used. The primary focus of this instrument is on retrieving high spatial resolution ozone measurements in the lower stratosphere and upper troposphere.
Wavelength | Objective | Spatial Resolution |
322 nm | Mid to upper stratospheric ozone | 0.5 km |
350 nm | Pointing channel | 0.5 km |
603 nm | Chappius band ozone channel | 0.75 km |
675 nm | Aerosol background channel | 0.75 km |
760 nm | Ozone absorption & pointing | 0.75 km |
Post-flight data availability of SOLSE/LORE-2: During the mission SOLSE collected data on 20 orbits, representing 100% of the data the project had hoped for. In addition, coincident data were collected from more than a dozen ground sites around the world. The complete data set of SOLSE was stored on the onboard hard drive and was lost on reentry. During the mission, the project was able to downlink about 10-12% of the scans from SOLSE. Of the LORE observations, about 70% of the data were downlinked.
On preliminary analysis of the data downlinked to the ground during the mission it appears that the SOLSE-2 mission was probably 80% successful in returning the anticipated science. The LORE data in hand provides good spatial coverage while the SOLSE data provides enough spectral coverage to give the ground team a handle on the capability of limb scattering. The only factor missing is a full spectral coverage at all altitudes (from reference 1).
The measurements made by the SOLSE-2 mission on the Space Shuttle Columbia demonstrated that the limb-sounding technique will work very well for monitoring ozone in next-generation satellites. For instance, the OMPS (Ozone Mapping and Profiler Suite) measurement technique, employed on the future NPOESS (National Polar-orbiting Operational Environmental Satellite System) missions, will use the limb- as well as the nadir-viewing observation techniques.
CVX-2 (Critical Viscosity of Xenon-2)
CVX-2 is an experiment of NIST (National Institute of Standards and Technology) and NASA/GRC (PI: Robert F. Berg). The objective is to measure the viscosity of Xenon at temperatures very near its liquid-vapor critical point (Tc = 16.7º C). CVX is a microgravity experiment with a sensitive, precision hydro-mechanical sensor for measuring viscosity. Temperature scans of the Xenon contained in the sample cell are taken at selected rates near its critical temperature, viscosity measurements are also taken. The data is compared to theoretical values, they provide complementary results to existing ground based test data. The experiment can be adversely affected by excessive accelerations resulting from Shuttle operations or vibrations. The CVX experiment is also thermally sensitive. It requires precise temperature control to a few millionths of a degree. CVX can perform autonomously, but in the most desirable scenario it is being controlled interactively via ground commands.
CVX-2 is managed by NASA/GRC and sponsored by NASA/HQ. CVX previously flew on the TAS-01 payload (STS-85, Aug. 7-19, 1997 on the CRISTA-SPAS-2 mission). The CVX-2 experiment is housed in two adjacent canisters mounted on the HH MPESS. One canister houses the EP (Experiment Package) including the viscometer/sample cell, and precision temperature control elements. The second canister houses the AP (Avionics Package) which includes the data acquisition and control electronics, and the power conditioning systems. The EP and AP canisters are interconnected via an intercom connect cable for power and data transmission. The EP and AP canisters are each equipped with UEPs (Upper End Plates) to accommodate a cable for power and data transmission that connects the two canisters, and to allow radiative cooling. The CVX-2 payload utilizes general Orbiter services, including power control, command, and telemetry provided through the HHC avionics equipment. On-orbit, the CVX-2 payload is being operated via the remote POCC. 21) 22)
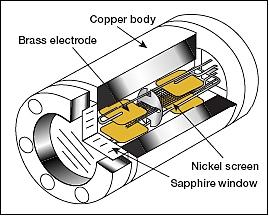
The heart of CVX–2 device is a nickel screen that vibrates between two pairs of brass electrodes in a xenon bath. The grid is 7 mm x 19 mm and weighs less than 1 mg. An electrode is positioned 4 mm to each side of the screen. An electrical charge applied by the electrodes will oscillate the screen. The electrodes measure the screen’s displacement and period, like a pendulum swinging in a liquid. The cell holds a small quantity of xenon near its critical temperature (Tc=16.6ºC) and critical density (1.1 times that of water) at 58 atmospheres, equivalent to a depth under water of almost 600 m.
The sample cell (Figure 10) at the heart of CVX comprises a copper body (Figure 11) that conducts heat efficiently and smooths out thermal variations that would destroy the xenon's uniformity. The cell sits inside a thermostat (Figure 12) providing three layers of insulation.


Almost all of the data from the experiment--sent by telemetry to the ground during the mission--were acquired before the tragic loss of the Shuttle orbiter and its seven-member crew on Feb. 1, 2003. The analysis of the data showed that the experiment was a complete success. 23)
CVX-2 Flight Hard Drive Data Recovery: The flight hard drive from the Critical Viscosity of Xenon 2 (CVX-2) experiment had been found by the STS-107 Recovery Team and returned to the NASA/GRC experiment team for evaluation. The hard drive was sent to Kroll Ontrack, Inc. to determine if data could be extracted from the damaged drive. Ontrack was able to clean the hard drive and recover over 90% of the recorded data. This data was subsequently sent to the Principal Investigator, Robert F. Berg. The recovered files included data that had not been downlinked.
SOLCON-3 (Solar Constant Experiment-3)
SOLCON-3 is of SOLCON-2 heritage flown various Shuttle missions (see Table 4). The instrument is a cooperative effort of IRMB (Belgium), Space Science Dept. of ESA, and NASA/LaRC (PI: Alexandre Joukoff). The objective is to accurately measure the solar constant and identify variations in the value during a solar cycle. This is done by determining the power difference required to bring two cavities into thermal balance when one is open to the sun and the other is closed. 24) 25)
SOLCON-3 is mounted on a HH Single Bay Pallet (SBP) on top of the HH MPESS. SOLCON-3 consists of a substitution radiometer (absolute cavity device) and a digital processor unit covered by a thermal blanket to provide Passive Thermal Control (PTC). The digital processor unit houses the experiment electronics that provide internal experiment control and interface to the HH avionics.
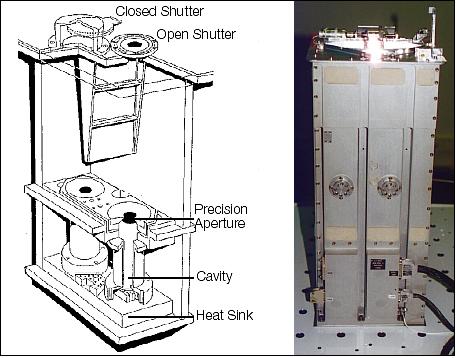
SOLCON is a differential absolute radiometer. The radiometer unit houses the sun-pointing monitor, shutter assembly, radiometer assembly and electronics. The radiometer unit consists of two channels through which solar radiation is sensed. Each channel contains a radiation sensor and has two apertures. The first aperture of each channel is protected by independent shutters. Each shutter seals out any solar radiation from the radiation sensor when closed and allows the sensor to receive solar radiation when open. An opening and closing outer cover on the radiometer unit provides protection from contamination during non-operating periods. The SOLCON-3 instrument utilizes general Orbiter services, including power control, command, and telemetry provided through the HHC avionics equipment. On-orbit, SOLCON-3 is being operated via the remote POCC (Payload Operations and Control Center).
Launch Vehicle | Date | Mission | Instrument |
STS-9 (Shuttle) | Nov. 28 - Dec. 8, 1983 | Spacelab-1 (ESA) | SOLCON-1 |
STS-45 | March 24 - April 2, 1992 | ATLAS-1 (NASA) | SOLCON-2, ACRIM-II |
STS-46/57 | Jul. 31, 1992 - Jun. 21, 1993 | EURECA (ESA) | SOVA-1, SOVA |
STS-56 | April 8-17, 1993 | ATLAS-2 (NASA) | SOLCON-2, ACRIM-II |
STS-66 | Nov. 3-14, 1994 | ATLAS-3 (NASA) | SOLCON-2, ACRIM-II |
STS-85 | Aug. 7-19, 1997 | Hitchhiker (NASA) | SOVA-1 (Solar Constant and Variability Instrument) |
STS-95 | Oct. 29 - Nov. 7, 1998 | Hitchhiker (NASA) | SOLCON-2 |
STS-107 | Jan. 16-Feb. 1, 2003 | FREESTAR (NASA) | SOLCON-3 |
Virtually all SOLCON-3 data was downlinked during the mission. On flight STS-107, SOLCON-3 has also been used to determine the SARR (Space Absolute Radiometric Reference) coefficients of ACRIM-III on ACRIMSAT and to verify the VIRGO coefficients on SOHO. Also comparison of coincident observations from the DIARAD (Differential Absolute Radiometer) instrument on board the SOHO spacecraft.
LPT/CANDOS (Low Power Transceiver / Communications and Navigation Demonstration on Shuttle)
LPT, a low power, light-weight and software programmable transceiver prototype, is a technology demonstration experiment co-sponsored by NASA and ITT-AES (Advanced Engineering & Sciences), Reston, VA, a division of ITT Industries Inc. LPT is an advanced signal processing platform that offers a configurable and reprogrammable capability for supporting communications and/or navigation functions of mission applications ranging from single unit, non-real-time operation to multi-unit, real-time formation flying.
LPT began as a NASA concept to implement an ultra-small/low-power spacecraft transceiver, with advanced capabilities for acquiring and tracking multiple signals simultaneously and across multiple RF bands - a major advancement relative to existing and near-term single channel transceivers. This also introduced, for the first time, the opportunity of integrating GPS navigation and space/ground communications into a single, compact, low-power, cost-effective transceiver package. Because all signal processing is performed in FPGA and DSP devices, the LPT represents a true “software radio” technology that can be reprogrammed after deployment. 26) 27) 28) 29) 30) 31)

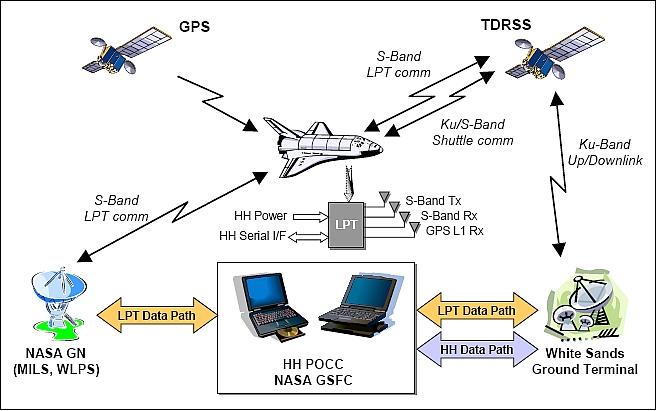
The objective is to test the LPT technique as a low cost S-band spacecraft navigation and communication device. LPT receives GPS signals (L1 C/A) as input for navigation support (intended for future formation flying applications, crosslink, etc.) and provides in this scenario low-rate data communications links (forward and return) to ground stations located at MILA (Merritt Island Launch Annex, KSC, FLA) and at DFRC (Dryden Flight Research Facility, Edwards AFB, CA), as well as to the TDRS (Tracking and Data Relay Satellite) system. The experiment is designed to demonstrate the system's ability to do simultaneous communications and navigation, as well as multi-mode communications and reconfiguration. LPT is mounted on a two HH Single Bay Pallets (SBP) on top of the HH MPESS.

The LPT experiment consists of one thermally conductive box containing the electronics stack, three S-band antennas and one L-band antenna. The LPT payload utilizes general Orbiter services, including power control, command, and telemetry provided through the HHC avionics. On-orbit, LPT is being operated (primarily) via direct communications between LPT and the ground stations MILA (Merritt Island) and/or DFRC (Dryden Flight Research Facility) and/or TDRS, with backup command and telemetry capability provided via the HH avionics and remote POCC. During operations, LPT utilizes high S-band frequencies for communications. The LPT TDRS and GN (Ground Network) forward link (uplink) frequency is 2106.40625 MHz, and their TDRS (and GN) return link (downlink) frequency is 2287.5 MHz (utilizing left-handed circular polarization to work with the TDRS MA system). Two standard switch panel switches are being utilized to prohibit inadvertent operation of the antenna. An additional inhibit is being provided through the HH avionics power relay to the LPT.
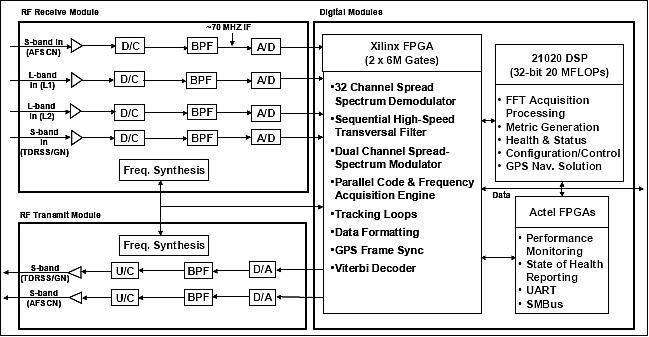
The LPT demodulator is capable of processing both phase shift keyed (PSK) and more general linear phase modulated (PM) signals, either spread or non-spread, as required by NASA's TDRSS and STDN communications systems and by GPS. Coherent tracking of symbols, carrier and, when necessary, PN code is accomplished for data rates up to 1 Mbit/s. The most recent generation of the LPT includes a “Dial-a-Channel” feature that dynamically optimizes the LPT's signal processing capability by allowing the user to increase the nominal maximum data rate when the total number of receive channels is reduced. The LPT modulator is a dual-channel structure capable of modulating two independent data streams at data rates up to 5 Mbit/s each using BPSK, QPSK, OQPSK, and linear PM.
Overview of the CANDOS mission
Communication And Navigation Demonstration On Shuttle (CANDOS)
- Hitchhiker payload on STS-107, January 16, 2003
- Part of the FREESTAR (Fast Reaction Experiments Enabling Science, Technology Applications, and Research) payload
Low Power Transceiver (LPT) space test
- LPT is a multi-channel, programmable transceiver
- Supports Space Network (SN), Ground Network (GN), and GPS modes
- Built on stackable PC104 form factor boards
- Initial flight test of transmitter, receiver, and GPS capabilities
Internet Protocol (IP) tests in space
- Test wide range of standard Internet protocols over SN and GN
- Primary test of Mobile IP protocol for space use
- Secondary tests of NTP, UDP, MDP, FTP, SCP, SSH,and IP operations
Ground station upgrades
- Initial test of issues for upgrading SN and GN stations to support HDLC framing and Internet protocols on space links
The LPT/CANDOS experiment consisted of the LPT (Low Power Transceiver), three S-band antennas, and one L-band antenna; the end-to-end data flow architecture is based entirely on standard IP protocols and HDLC (High-Level Data Link Control) data framing. All data routing was accomplished via IP source/destination addresses over NASA's existing closed IONet (IP Operational Network) which is physically isolated from the open Internet. The following demonstrations were conducted in the LPT/CANDOS end-to-end data flow architecture:
• GN/SN (Ground Network/Space Network) communications.
• GPS Tracking and Orbit Determination. LPT hosted GEODE (GPS Enhanced Orbit Determination Experiment) software package.
• Internet Protocol (IP) Communications and Operations. The Internet used for Shuttle-to-Earth communications was NASA's IONet, which used the same protocols as the Internet while remaining separate from the Internet at large.
• Range Safety (TCP-based encrypted remote login and encrypted file transfer)
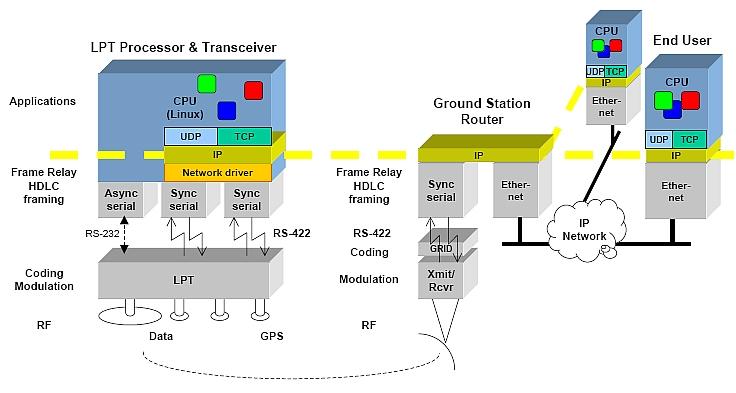
The LPT of CANDOS was used to directly contact either ground stations or TDRS, independent of the Shuttle communications system. During all events, payload (LPT) telemetry was being transmitted in UDP (User Datagram Protocol) packets continuously, providing a real-time housekeeping data stream. The use of MIP (Mobile IP) aided the use of the TCP/IP protocols; it reconfigured the data paths between the control center and the payload automatically as the link switched between ground stations (allowing the LPT address to remain static). The CANDOS flight represented the first practical demonstration of the MIP technique.
On STS-107, all experiments were a complete success, throughout the course of the mission, CANDOS had almost 60 hours of total contact time via its own communication system. The CANDOS operation on STS-107 represents the second web server implementation in space [the first web server demonstration was being conducted on UoSat-12 of SSTL on Jan. 25, 2001 - HTTP (HyperText Transfer Protocol) was used to transfer real-time telemetry and stored instrument data directly from UoSat-12 to an end user].
The CANDOS payload was flying an off-the-shelf PC using a Linux operating system (Red Hat Linux 6.1 with an unmodified IP stack). The addition of Cisco 2621 routers and ground-station interface devices completed the elements of the hardware setup.
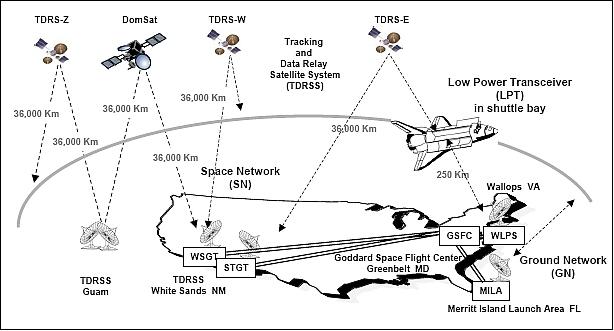
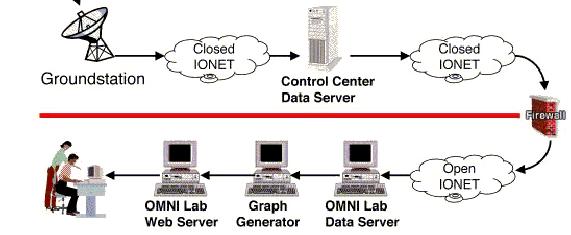
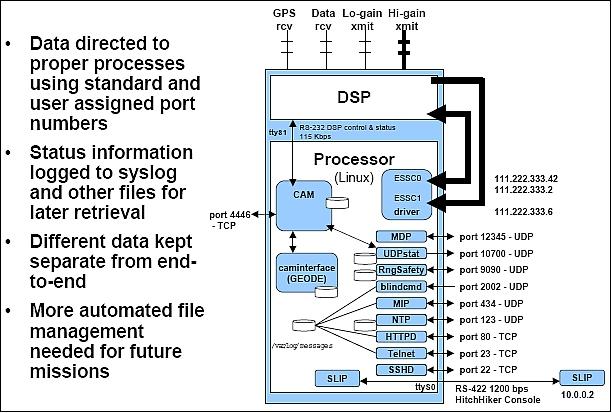
Figure 21: LPT software architecture (image credit: NASA, CSC)
Data collection
Onboard LPT
- 10 second housekeeping status collected onboard and downlinked as real-time telemetry during communication contacts
- All information timestamped in SYSLOG facility or application logs (NTP, GPS, MIP, BlindCmd, RangeSafety, etc.)
- Manually compressed and moved log files to download directories
Network Monitoring
- PERL/SNMP program to monitor router interface traffic, data rates, error indicators, and MIP tunnel status
- Ethernet LAN analyzer to log all packets in/out of control center
Control Center
-Captured LPT housekeeping telemetry, displayed it, and forwarded UDP status packets to multiple systems with LabView graphical status displays
- Downloaded files collected and stored by pass for later analysis
Experiment | UDP protocols | TCP protocols |
Automated IP routing to current ground station antenna | Mobile IP- Automatically setup IP routing tunnels to multiple stations/antennas (SN and GN) |
|
Real-time telemetry delivery | UDP status packets - to monitor status of LPT over two-way and one-way links addressed to multiple destination addresses |
|
Onboard clock synchronization | Network Time Protocol (NTP) - synchronize and maintain onboard clock referenced to ground time servers |
|
Commanding | UDP Blind Commanding - Send UDP command packets to LPT over one-way uplink without Mobile IP or a two-way link | Secure Shell (SSH) & Telnet - login and control experiments from multiple locations |
Reliable file transfer | Multicast Dissemination Protocol (MDP) - perform reliable file transfer over both two-way and one-way communication links | Secure Copy (SCP) and File Transfer Protocol (FTP) - reliably transfer files to and from LPT during SN and GN two-way contacts |
Overall protocol results
HDLC framing performed well
- Variable length frames with CRC-16 error check
- Operates over uncoded & convolutional coded links, various rates
– ISO standard supported by standard router serial interfaces
– Works over one-way links
– Used over space links for over 20 years
Multi-protocol Encapsulation over Frame Relay
- RFC 2437 - IETF standard
– Supported by standard routers and Frame Relay equipment
– Works over one-way links
– Serial line analyzers and protocol decodes available
UDP/IP packets well suited for space use
- Standard protocols supported by all routers and computers
– No connection setup, each packet is self identifying and routable
– Work over one-way links
– Easy to pass out through one-way firewall paths
– Worked for one-way blind commanding and status packets
Mobile IP performed very well (~50 ms setup + RTT delay)
– Mobile IP registration set up tunnel as soon as two-way RF link was established (routers advertising every ~12 sec)
– Mobile IP only required three packets to set up tunnel on marginal links (advertisement up, registration request down, reg. ACK up)
MDP file transfer protocol used extensively
– Supported transfers over one-way and two-way links
– Allowed starting file downlinks before uplink was fully established
– Independent of link bandwidth asymmetry and propagation delay
NTP functioned but needs more work for high precision
– NTP did maintain the processor clock and provided accurate time stamps for all system logs and telemetry samples
– Didn’t have good HW for precision timing , simple PC104 computer clock, no thermal control, no 1 PPS source,
– No independent onboard time reference to measure against
SSH and SCP used successfully
– Required two-way link
UDP telemetry packets
UDP packet uses in space communication
– Each packet has a full network source & destination address as well as UDP port number information to further categorize and route data packets
– UDP unaffected by link delays and data rates
– Functions properly without needing Mobile IP or two-way link
– Current NASA data is carried around the ground in with CCSDS/4800BB/TDM in UDP packets
LPT real-time telemetry status packets
– CANDOS used simple tab-delimited ASCII strings to send real-time status data to specific ports on different systems for different types of data
– Telemetry packet sizes variable from ~ 425-475 bytes depending on the numerical values in them
– UDP packets delivered to open Internet via one-way only path through NASA firewall
UDP flexibility
– Different telemetry packets delivered to various destinations based on onboard addressing decisions.
– Easily built status display programs using PERL, LabView, TREK
The quantity and quality of data collected in all of the CANDOS experiments far exceeded pre-flight mission expectations. Through the use of the communications links being demonstrated by the LPT, all of the performance data required to validate mission objectives was transferred to the ground. The CANDOS experiment was a resounding success, accomplishing every primary and secondary objective established prior to the mission, as well as some extras thrown in during the mission itself. CANDOS has paved the way for future missions that will rely on the use of multi-mode communications, autonomous spacecraft navigation, IP in space, and space-based range safety. As it continues to evolve, the LPT will continue to enable newer, smaller, lighter, and more complex spacecraft (Ref. 29).
Why extend the Internet to space? There are great benefits in cost, simplicity and reliability for future spacecraft LAN services - it means “operating missions as nodes on the Internet.” The Internet embodies a key underlying technical idea, namely that of open architecture networking. It provides a good example of a scalable, robust, efficient, and adaptive network architecture that could support future orbiting sensor webs. The use of IP (Internet Protocols) in the space segment, i.e. for onboard LAN use as well as for data transmission services, is attractive because it provides for easy interconnection with the terrestrial Internet. IP enables advanced mission concepts (e.g., collaborative science) and allows better alignment with industry standards and products (end-to-end network solutions). IP supports a simpler, yet more capable, overall mission design and enables a simpler operations solution. Eventually each spacecraft instrument may be on a LAN with its own IP address.
SEM-14 (Student Experiment Module)
SEM-14 is an educational initiative which allows students to fly simple experiments and become involved in space flight and research. The SEM was made up of 10 separate student-designed experiments from schools across the U.S.; this was the 14th flight of a SEM on the space shuttle program.
The stored data of the various experiments were lost in the STS-107 accident on Feb. 1, 2003.
References
1) “FREESTAR (STS-107): Final Mission Report,” March 20, 2003, compiled by K. Barthelme, http://spaceflight.nasa.gov/shuttle/archives/sts-107/science/freestar_report.pdf
2) Kenneth W. Hess, Steven B. Wallace, Sally K. Ride, Matthew Granger, “Payload and Payload Integration,” Volume II, Appendix D.6, October 2003, URL: http://www.nasa.gov/columbia/caib/PDFS/VOL2/D06.PDF
3) http://library01.gsfc.nasa.gov/host/hitchhiker/overview.html
4) “MEIDEX, Mediterranean Israeli Dust Experiment, Scientific Objectives,” [web source no longer available]
5) http://library01.gsfc.nasa.gov/host/hitchhiker/meidex.html
6) Y. Yair, C. Price, Z. Levin, J. Jospeh, A. Devir, B. Ziv, M. Moalem, P. Israelevich, S. Clodman, “Coordinated Observations of Sprites and other TLE from the Space Shuttle and from the Ground during the MEIDEX,” Proceedings of ICAE (International Commission of Atmospheric Electricity), June 9-13, 2003, Versailles, France
7) Y. Yair, C. Price, Z. Levin, B. Ziv, P. Israelevich, A. Devir, M. Moalem, S. Clodman, J. Jospeh, “The MEIDEX Sprite Campaign,” Geophysical Research Abstracts, Vol. 5, 03213, 2003
8) Joachim H. Joseph, Zev Levin, Yuri Mekler, Adam Devir, Eliezer Ganor, Peter Israelevich, Edmund Klodzh, Tamir G. Reisin, Yoav Yair, “The Mediterranean Israeli Dust Experiment (MEIDEX),” URL: http://irc-iamas.org/files/MEIDEX.doc
9) Zev Levin, Joachim Joseph, Yuri Mekler, Peter Israelevich, Eli Ganor, Ernest Hilsenrath, Scott Janz, Adam Devir, M. Moalem, Yoav Yair, “Deciphering the Role of Desert Dust in the Climate Puzzle, The Mediterranean Israeli Dust Experiment (MEIDEX),” URL: http://spaceresearch.nasa.gov/sts-107/107_MEIDEX.pdf
10) Y. Yair, C. Price, Z. Levin, J. Jospeh, A. Devir, B. Ziv, M. Moalem, P. Israelevich, S. Clodman, “Coordinated Observations of Sprites and other TLE from the Space Shuttle during the MEIDEX,” ICAE (International Conference on Atmospheric Electricity) 2003, Versailles, France, June 9-13, 2003 [web source no longer available]
11) Y. Yair, C. Price, P. Israelevich, A. Devir, M. Moalem, B. Ziv, Z. Levin, J. Joseph, “New Space Shuttle Observations of Transient Luminous Events During the MEIDEX,” AGU Fall Meeting 2003, San Francisco, CA, Dec. 8-12, 2003,
12) P. L. Israelevich, Y. Yair, A. D. Devir, J. H. Joseph, Z. Levin, I. Mayo, M. Moalem, C. Price, B. Ziv, A. Sternlieb, “ Transient airglow enhancements observed from the space shuttle Columbia during the MEIDEX sprite campaign,” Geophysical Research Letters, Vol. 31, 2004, L06124, doi:10.1029/2003GL019110
13) Yoav Yair, Colin Price, Baruch Ziv, Peter L. Israelevich, Davis D. Sentman, Fernanda T. Säo-Sabbas, Mitsuteru Sato, Craig J. Rodger, Meir Moalem, Eran Greenberg, Ofer Yaron, “Space shuttle observation of an unusual transient atmospheric emission,” Geophysical Research Letters, Vol. 32, January 2005, L02801, doi:10.1029/2004GL021551, URL: http://wwlln.net/publications/yair.grl.2005.pdf
14) Yoav Yair, Zev Levin, Joachim Joseph, Peter Israelevich, Colin Price. Adam Devir, Baruch Ziv, Meir Moalem, “Summary of observations of thunderstorms, sprites and elves from the space shuttle Columbia during the MEIDEX, ”Transient airglow enhancements observed from the space shuttle Columbia during the MEIDEX sprite campaign,” Geophysical Research Letters, Vol. 31, 2004, L06124, doi:10.1029/2003GL019110, URL: http://documents.irf.se/get_document.php?path=Administration/33AM/Yair
15) P. L. Israelevich, Y. Yair, A. D. Devir, J. H. Joseph, Z. Levin, I. Mayo, M. Moalem, C. Price, B. Ziv, A. Sternlie, “URL: http://geophysics-old.tau.ac.il/personal/ILAN/Israelevih%20et%20al.pdf
16) Philip Laven, “Atmospheric glories: simulations and observations,” Applied Optics, Vol. 44, No 27, Sept. 20, 2005, pp. 5667-5674, URL: http://portal.in.th/files/2/7/3/2010/10/18/AO-44-27-p5667.pdf
17) R. Loughman, R. McPeters, D. Flittner, E. Hilsenrath, S. Janz, T. Brown, D. Rault, M. Hill, S. Petelina, C. von Savigny, “The SOLSE/LORE-2 Experiment: Ozone profiles retrieved from limb scattering measurements,” 3rd International Atmospheric Limb Workshop, Montréal, Canada, April 25, 2006
18) “Measuring Ozone from Space Shuttle Columbia,” Earth Observatory, NASA, URL: http://earthobservatory.nasa.gov/Features/SOLSE/
19) Richard McPeters, Ernest Hilsenrath, Scott Janz, Tammy Brown, “Looking at Ozone From a New Angle, Shuttle Ozone Limb Sounding Experiment–2 (SOLSE–2),” NASA STS-107 Shuttle Press Kit, Dec. 16, 2002, pp. 65-66, URL: http://science.ksc.nasa.gov/shuttle/missions/sts-107/docs/sts-107-presskit.pdf
20) http://library01.gsfc.nasa.gov/host/hitchhiker/solse_2.html
21) http://library01.gsfc.nasa.gov/host/hitchhiker/cvx_2.html
22) Robert F. Berg, Michael R. Moldover, Gregory A. Zimmerli, Susan M. Motil, “Stirring Up an Elastic Fluid, Critical Viscosity of Xenon–2 (CVX–2),” NASA STS-107 Shuttle Press Kit, Dec. 16, 2002, pp. 71-72, and pp. 108-109, URL: http://science.ksc.nasa.gov/shuttle/missions/sts-107/docs/sts-107-presskit.pdf
23) NIST experiment's data acquired before space shuttle tragedy - General Developments - Brief Article, Journal of Research of the National Institute of Standards and Technology, March-April, 2003
24) http://library01.gsfc.nasa.gov/host/hitchhiker/solcon_3.html
25) Dominique Crommelynck, Alexandre Joukoff, Steven Dewitte, Andre Chevalier, “Measuring Solar Radiation Incident on Earth, Solar Constant–3 (SOLCON–3),” NASA STS-107 Shuttle Press Kit, Dec. 16, 2002, pp. 67-68, URL: http://science.ksc.nasa.gov/shuttle/missions/sts-107/docs/sts-107-presskit.pdf
26) D. Weigand, M. Harlacher, “A Radiation-Tolerant Low-Power Transceiver Design for Reconfigurable Applications,” Earth Science Technology Conference, Pasadena, CA, June 11-13, 2002
27) D. Weigand, M. Harlacher, “Design of a Radiation-Tolerant Low-Power Transceiver,” MAPLD International Conference, JHU/APL, Laurel, MD, Sept. 12-13, 2001, URL: https://web.archive.org/web/20080513153244/http://klabs.org/richcontent/MAPLDCon01/Abstracts/Weigand_A.pdf
28) David J. Israel, “CANDOS IP Mission Support Demonstration,” Proceedings of RCSGSO (Reducing the Cost of Spacecraft Ground Systems Operations), Pasadena, CA, July 8-11, 2003, URL: http://descanso.jpl.nasa.gov/RCSGSO/Paper/A0037Paper.pdf
29) Scott Pace, Marc Harlacher, Lin Haas, “Test Results From The Communications And Navigation Demonstration On Shuttle (CANDOS) Experiment,” International Symposium on GPS/GNSS, Tokyo, Japan, Nov. 15-18, 2003, URL: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.133.748&rep=rep1&type=pdf
30) David J. Israel, David J. Zillig, “CANDOS Experiment Overview,” SpaceOps 2002, Oct. 9-12, 2002, Houston, TX, USA, URL: http://www.docstoc.com/docs/80302614/CANDOS-EXPERIMENT-OVERVIEW
31) David Israel, James Rash, Keith Hogie, Ed Criscuolo, Ron Parise, Francis Hallahan, “STS-107 Case Study: End-to-End IP Space Communication Architecture,” GSAW (Ground Systems Architectures Workshop) 2003, Manhattan Beach, CA, USA, March 4-6, 2003, URL: http://sunset.usc.edu/gsaw/gsaw2003/s8d/hogie.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).