Foton-M3 Mission / YES2 and OWLS Experiments
Non-EO
ESA
ROSKOSMOS
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA, ROSKOSMOS |
| Mission status | Mission complete |
| Launch date | 14 Sep 2007 |
| End of life date | 26 Sep 2007 |
Foton-M3 Mission / YES2 and OWLS Experiments
Foton-M3 is a Russian spacecraft with the objective to perform space experiments during a short mission life (generally up to 2 weeks). The Russian Space Agency, Roskosmos, is responsible for the spacecraft, while ESA is responsible for the payload and experiments. A procurement order/agreement between ESA and Roskosmos, regarding the Foton-M2 and -M3 missions and payloads, was signed October 21, 2003. 1)
Background
The Foton unmanned recoverable spacecraft series was introduced by the former Soviet Union with a first flight in 1985. The spacecraft has been designed and built by TsSKB-Progress (Central Specialized Design Bureau Progress), Samara, Russia; the design was based on the famous Vostok spacecraft bus. Foton was envisaged as a microgravity platform for physics and materials science to complement the very similar Bion capsules that were aimed at life science studies. In later years, an increasing number of biology and non-microgravity experiments were transferred to Foton, while the Bion program was discontinued. 2) 3)
Foton-1 through -4 had been pure Soviet missions; however, from Foton-5 onwards equipment from Western Europe was added to the experiment complement. The participation of ESA began in 1991 with a single protein crystallization experiment on Foton-7, followed in 1992 by the qualification flight of Biopan on Foton-8.
At first separate agreements were signed with CNES, DLR, ESA, as well as with industry to launch single payloads with a maximum mass of 30 kg. Starting from 1994, long-term programs with CNES, DLR and ESA have been realized concerning the launch of research hardware on the Foton spacecraft in support of microgravity experiments. A Foton spacecraft has a typical mass of about 6200-6500 kg, carrying a scientific payload of about 650 kg, and an average daily power of 600 W. To minimize perturbation forces, thereby maximizing microgravity conditions (as low as 10-5 g), Foton spacecraft were placed in mildly eccentric orbits at inclinations of 62.8º (altitude range of 200-300 km) and were not maneuvered during the mission (this means the S/C were not oriented toward any particular direction).
The upgraded Foton-M spacecraft series, starting with Foton-M1, provides an average daily power of 800 W to the payload for a mission during of about 15 days. The Foton-M series spacecraft are being launched from Baikonur, Kazakhstan, with a Soyuz-U three-stage launch vehicle. The Foton-M2 spacecraft carried a European payload (coordinated by ESA) covering a scientific program consisting of 39 experiments in fluid physics, biology, material science, meteoritics, radiation dosimetry and exobiology (this represented essentially a reflight of the Foton-M1 payload). 4)
Spacecraft | Launch date | Launch site | Flight duration (days) |
Foton-1 | Apr. 16, 1985 | Plesetsk, Russia | 12.6 |
Foton-2 | May 21, 1986 | 13.6 | |
Foton-3 | Apr. 24, 1987 | 13.6 | |
Foton-4 | Apr. 14, 1988 | 13.6 | |
Foton-5 | Apr. 26, 1989 | 14.6 | |
Foton-6 | Apr. 11, 1990 | 15.6 | |
Foton-7 | Oct. 04, 1991 | 15.6 | |
Foton-8 | Oct. 08, 1992 | 15.6 | |
Foton-9 | Jun. 14, 1994 | 17.6 | |
Foton-10 | Feb. 16, 1995 | 14.6 | |
Foton-11 | Oct. 09, 1997 | 13.6 | |
Foton-12 | Sep. 09, 1999 | 14.6 | |
Foton-M1 | Oct. 15, 2002 | launch failure | |
Foton-M2 | May 31, 2005 | Baikonur, Kazakhstan | 16.0 |
Foton-M3 | Sept. 14, 2007 | 12.0 |
Payload Interactive Link Services in S-band
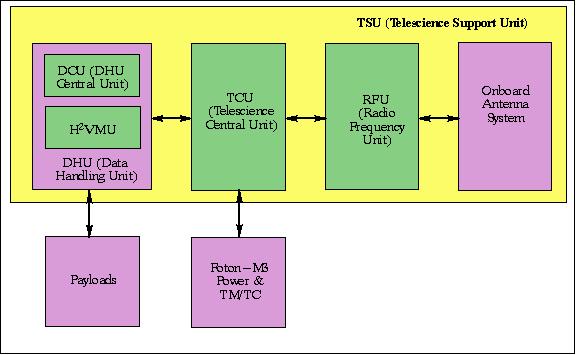
The TSU (Telescience Support Unit) concept was introduced on Foton spacecraft, starting with Foton-12. TSU is a stand-alone module enabling the user to conduct telescience operations on experiment facilities onboard the Russian Foton spacecraft. The TSU represents a direct link to the Foton payload module, providing services in particular to the international partners of the Foton missions. As stand-alone module, the TSU contains four units, namely the TCU (Telesupport Central Unit), the RFU (RF Unit), and the DHU (Data Handling Unit). The TSU ground station is located at ESRANGE, Kiruna, Sweden. The TSU project was funded by ESA and implemented by SSC (Swedish Space Corporation) as prime contractor (the DHU was built by Techno System Development of Naples, Italy, and the antennas were provided by TsSKB-Progress in Samara). 5) 6) 7)
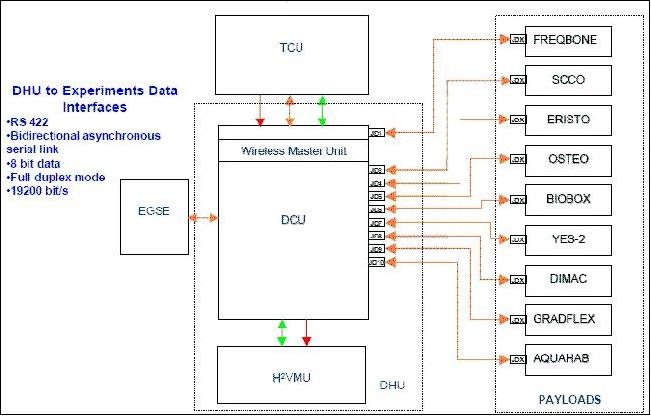
The TSU service enables the user to conduct telescience operations on experiment facilities onboard the Foton spacecraft. A central point of control at the ground station is provided in support of all payload functions. The DHU consists of two units: DCU (DHU Central Unit) and H2VMU (High Resolution/High Frame Rate Video Management Unit). These units interfaces the scientific experiment payloads and handle data compression and other related tasks.
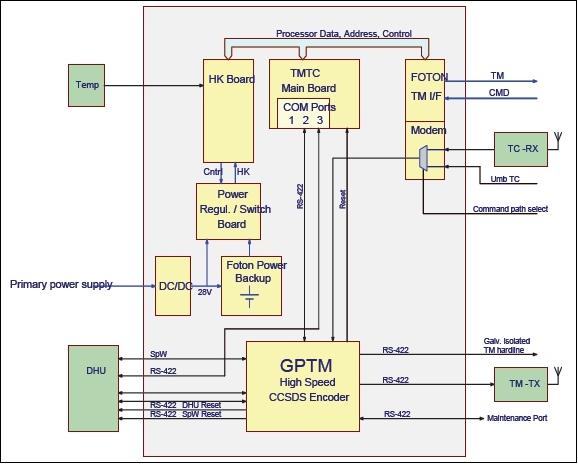
The TCU (Telescience Central Unit) provides telemetry formatting, telecommand decoding, stored command execution, power distribution and interfaces to DHU, RFU and the Foton spacecraft.
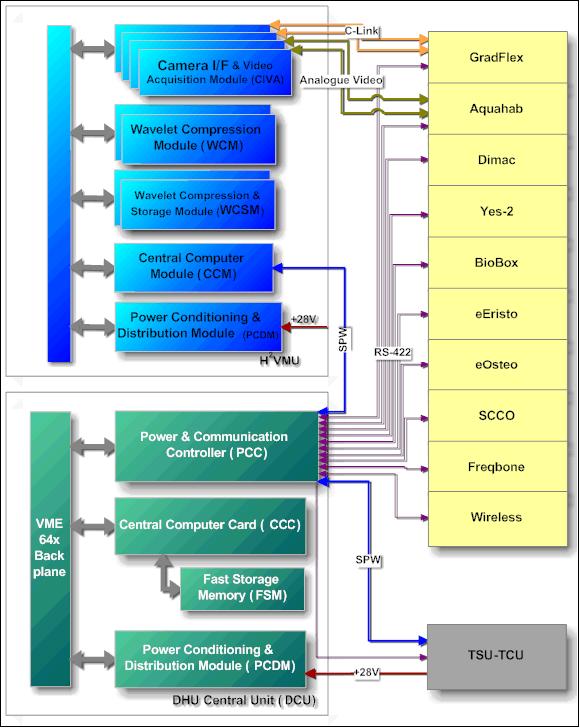
The DHU (Data Handling Unit) is a major component of the TSU. It features a distributed architecture comprising a main unit called DCU (DHU Central Unit) and up to four DPUs (DHU Peripheral Units) connected to the DCU by means of high speed SpaceWire links.
The DHU handles real-time video acquisition, real-time lossy and lossless data compression for transmission to the ground, and onboard storage and real-time onboard image processing. It consists of the following elements:
- CIVA (Camera I/F and Video Acquisition Module) for image grabbing
- WCM (Wavelet Compression Module) for image compression
- WCSM (Wavelet Compression and Storage Module)
- PCDM (Power Conditioning and Distribution Module).
Spacecraft
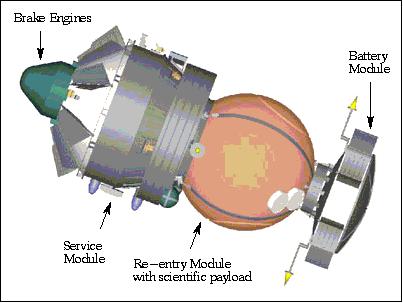
The 3-axis stabilized spacecraft consists of three modules: the re-entry module, the battery pack, and the service module (attitude and orbit control). The spacecraft has a total length of about 6.5 m.
• Re-entry module. This is a pressurized module, a sphere of 2.2 m diameter (volume up to ~4.5 m3) housing the scientific payload. It is protected with a heat shield and is the only part of Foton to return to Earth at the end of the mission
• Battery module. The battery pack is the main energy source for the satellite and payload during the mission
• Service module (attitude and orbit control), equipped with gas thrusters and a rocket engine used in the re-entry burn.

The Foton-M (modernized) series spacecraft are capable of carrying up to 650 kg of scientific payload. On a typical two-week mission, an average daily power budget of 700 W is available with a maximum peak of 800 W for a few hours. The residual acceleration levels on board are between 10-4 and 10-6 g, in the bandwidth from a few mHz up to several hundred Hz. This is the most important range for microgravity experiments.
The landing system employs parachutes and a retro-rocket to cushion the shock on impact with the ground. The payload is then retrieved and returned to ESA personnel in Samara (Russia) within a day.
Launch
A launch of Foton-M3 took place on Sept. 14, 2007 from the Baikonur Cosmodrome, Kazakhstan, on a Soyuz-U launch vehicle. 8)
Orbit: LEO slight elliptical orbit, perigee of 220-260 km, apogee of 350-400 km, inclination = 62.8º, period of 88.2 min. During the short-term mission, the Foton-M3 spacecraft will lose some altitude (~10 km) due to atmospheric drag at these low orbiting altitudes.
Foton-M3 spent 12 days in orbit, during which time the onboard experiments were exposed to microgravity, and in some cases, to the harsh environment of open space, before re-entering the atmosphere and landing on the steppes near the Russian-Kazakh border.
Experiment Complement (YES2, OWLS)
Table 2 lists the experiment complement of the Foton-M3 mission. However, only the technology demonstrations of YES2 and OWLS are being described within the context of this mission. - Note: In Table 2, KBOM is the Design Bureau of General Machine-Building, Moscow, Russia. The Foton-M3 payload has a total mass of about 400 kg. 9)
Overall, the payload of Table 2 consists of 43 experiments designed to test the effects of microgravity and radiation. The experiments include fluid physics, biology, protein crystal growth, meteoritics, radiation dosimetry and exobiology.
A very interesting member of the mission is the Life Marker Chip (LMC) of the Biopan facility of ESA [led by an international consortium with researchers from the United Kingdom (UK), The Netherlands, Germany, and USA]. The objective of LMC is to look for specific molecules associated with life by detecting biomarkers. Such techniques have been developed in the medical and biotechnology sectors but have not been used in space before. The Biopan facility is attached to the outside of Foton-M3 to expose the experiment samples directly to the space environment to study the impact of space's extreme temperatures, ultraviolet, cosmic and other solar radiation, and near-perfect vacuum. - The LMC experiment is in particular planned for ESA's ExoMars rover mission, which is planned for launch in 2013.
The LMC trip to space on board Foton-M3 is just a test. Scientists want to see what happens to the experiment when it's exposed to the radiation and microgravity of being in orbit. The LMC experiment, as well as the other experiments on board the capsule will be recovered when the capsule returns to Earth on Sept. 25, 2007.
Experiment | Agency | Mass | Comment |
GradFlex | ESA | 55 kg | Gradient-Driven Fluctuation Experiment), 2 fluid physics experiments |
Telesupport | ESA | 27 kg | assists all payloads onboard |
Biopan | ESA | 27 kg | 10 experiments in exobiology and radiation exposure |
SCCO | ESA/CSA | 28 kg | 3 experiments on diffusion effects in crude oil |
Biobox | ESA | 64 kg | 5 experiments on cellular biology |
Eristo/Osteo | CSA/ESA | 66 kg | 3 experiments on bone growth and yield |
Aquahab | DLR/ESA | 18 kg | 2 experiments in biology of water organisms |
Polizon | KBOM | 144 kg | 4 experiments on materials science |
Stone | ESA | 1 kg | 2 meteoritic re-entry experiments |
Granada | ESA | 5 kg | growth of several protein crystals (2 exp.) |
Freqbone | B/ESA | 10 kg | countermeasures for bone losses in microgravity |
DataLogger | ESA/TsSKB | 2 kg | measurement of shocks, temperature, and RH in Foton |
DIMAC | ESA | 9 kg | DIMAC (Direct-measurement Micro-Accelerometer) |
Teplo | ESA | 10 kg | low-g performances of new design heat pipes |
YES-2 | ESA | 36 kg | student payload, tether-assisted re-entry |
OWLS | ESA | 0.5 kg | wireless technology demonstrator |
The DIMAC system developed for the Foton M-3 flight is a modular inertial monitoring system which measures vibrations, quasi-steady accelerations and the Earth magnetic field. It was built at RedShift Design and Engineering BVBA of Sint-Niklaas, Belgium. 10)
YES2 (Young Engineers' Satellite-2)
YES2 is a tether technology demonstration project of the ESA Education Office which started in 2002. The YES2 project is building on the experience of the YES and TEAMSAT payloads which were part of the MaqSat-H spacecraft, launched from Kourou with the Ariane-502 vehicle on Oct. 30, 1997. 11) 12) 13) 14) 15) 16) 17) 18) 19) 20) 21) 22)
The objectives of YES2 are twofold:
- To give European students a motivating technological & educational experience
- To demonstrate the application termed “SpaceMail” by returning a low mass reentry capsule (referred to as “FOTINO”) from space to Earth, using a tether of 30 km in length (mass of 5 kg) rather than a rocket engine. This may eventually lead to a frequent sample return capability from the ISS (International Space Station).
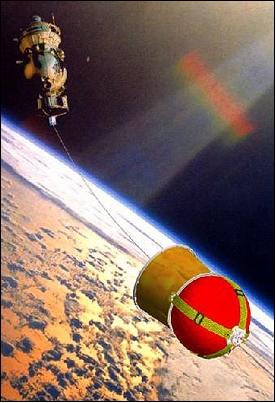
YES2 aims to demonstrate a tether-assisted re-entry concept, whereby the payload will be returned to Earth using momentum provided from a swinging tether. Deployment takes place in two phases: 23)
1) Deployment of 3.5 km of tether to the local vertical and hold
2) Deployment to 30 km for a swinging cut.
Initially, two missions were planned related to YES2: namely “YES2 Precursor” on Foton-M2, and YES2 on Foton-M3. However, the YES2 Precursor on Foton-M2 was cancelled and not flown in the 2005 mission.
The first phase of YES2 (2002-2003) focused on the conceptual design of the reentry vehicle and the development and testing of a tether deployment mechanism, ending with a PDR (Project Design Review) in Dec. 2003. The second phase focused on the detailed design of the subsystems, leading up to the building and testing of the actual space hardware.
The second phase of YES2 is being managed by the ESA contractor Delta-Utec SRC (Space Research & Consultancy) of Leiden, The Netherlands. In addition, there are 4 CoEs (Centers of YES2 Expertise) located at 4 different universities in Europe and in Russia. The CoEs are located at: Fachhochschule Rhein/Ahr Campus, Remagen/Krefeld, Germany; University of Modena & Reggio Emilia, Italy; University of Patras, Greece; and Volgaspace (Samara State Aerospace University SSAU), Samara, Russia.
In all, about 400 European and Russian students participated in the development of the YES2 satellite, largely within a university curriculum (even student teams from Japan, Canada, Australia, and USA were involved).
Mission scenario: After the normal Foton-M3 mission and before the Foton-M3 capsule re-entry maneuver, the YES2 tether mission will be initiated (YES2 switch on ~orbit 171). The YES2 mission scenario will be performed with a very high level of autonomy. The YES2 operations phase will last for about 6-7 hours. YES2 is demonstrating the tethered SpaceMail technology, i.e. delivery of a small payload from LEO using a tethered re-entry capsule.
YES2 sequence of operation: 24)
• The launch of Foton-M3 along with YES2 took place on Sept. 14, 2007 (nominal mission of 12 days)
• 11 days into the mission YES2 is turned on
• Deployment of the tether takes 2 ½ hour
• Fotino is released from MASS
• 10 seconds later Fotino and MASS is cut in FLOYD end
• Fotino hits the atmosphere and start braking down
• MASS hits atmosphere and burns completely
• Fotino lands in its own parachute at 10m/s
• A beacon is transmitted, and YES2 localized
• One day later the Foton capsule lands.
YES2 Spacecraft
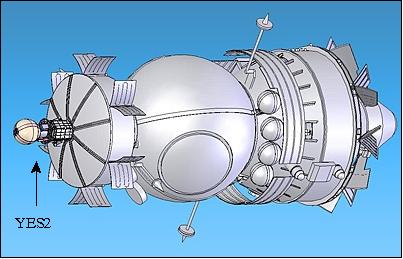
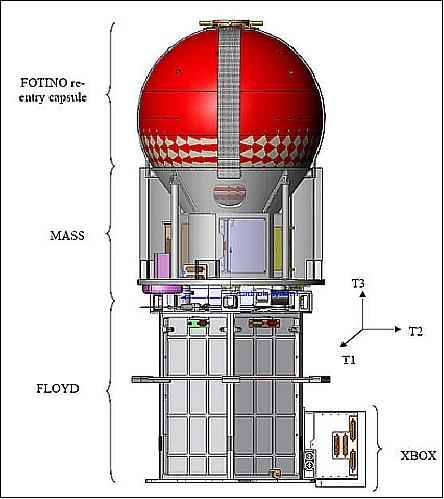
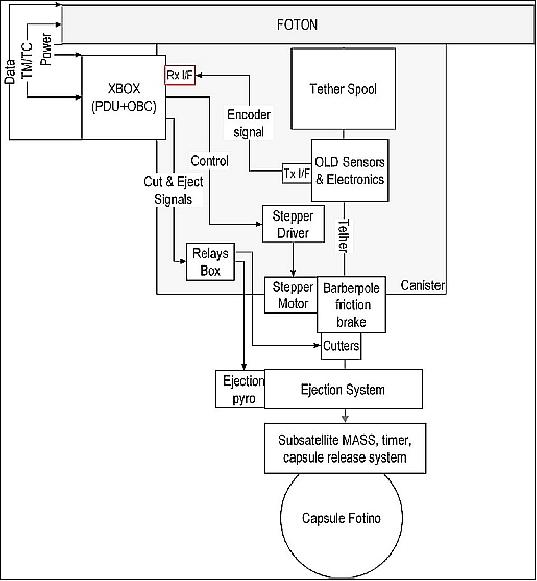
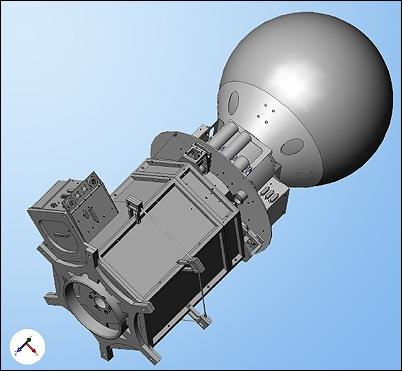
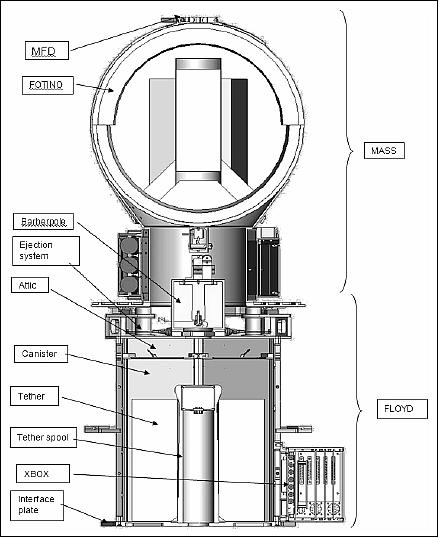
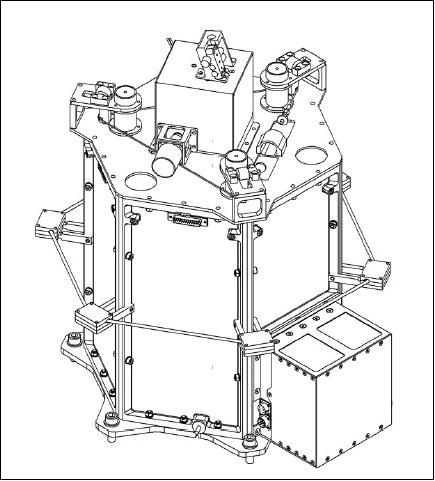
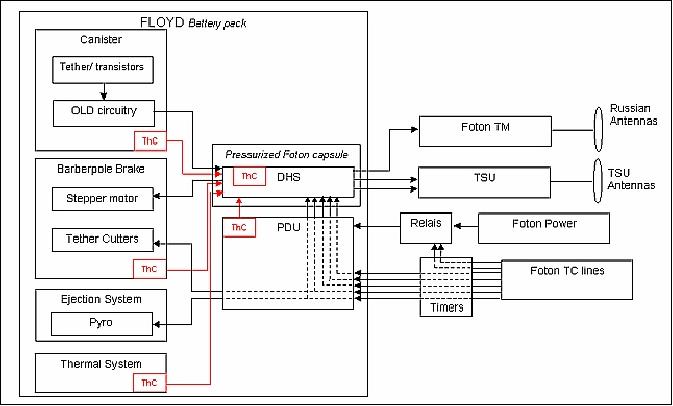
The YES2 system is bolted to the outside of the battery module of the Foton-M3 spacecraft as shown in Figure 7. The electronics of YES2 are concentrated in two places. In the YES2 Attic sub-module and in the main electronic enclosure (XBOX) that contains all the mission critical components and boards: PDU (Power Distribution Unit), OBC (Onboard Computer), I/O boards, and DC/DC power converters from Foton-M3 to YES2 subsystems. Also data are being exchanged between the Foton and YES2 subsystems. The YES2 satellite has a total mass of about 36 kg consisting of the following compoments (Figures 8 and 12):
• FLOYD (Foton Located YES Deployer), including tether spool and barber pole brake on Foton-M3 battery-pack as well as control, data and power system inside the Foton-M3 capsule (22 kg)
• MASS (Mechanical and data Acquisition Support System) with a mass of 8 kg
• FOTINO: Re-entry capsule (6 kg)
The YES2 ejection system is a subsystem of the FLOYD module of the YES2 satellite. It is the subsystem that acts as a mechanical interface between the FLOYD and MASS modules and gives the desired initial velocity to the MASS and FOTINO assembly during the first stage of the tether deployment. The required initial velocity is 2.1 m/s normal to the ejection system, the mass of the ejected payload is about 12 kg.
On YES2 ejection, FLOYD remains on the Foton-M3 spacecraft, it incorporates all the equipment to commence and control the tether deployment. MASS and FOTINO are ejected by the spring-based ejection subsystem that connects mechanically the FLOYD and the reentry capsule FOTINO, which must sustain the loads during the ejection phase. After 30 km of tether are deployed, FOTINO is being separated from MASS, with FOTINO following a ballistic trajectory to Earth and MASS burning up in the atmosphere.
The control of the tether deployment is realized with a friction device called “barber pole”. The stepper motor, included in this system, is identified as the mission critical part, due to its importance of reliable functionality of the barber pole for mission success.

FOTINO: The capsule consists of three main elements (total mass of 6 kg): 25)
- Thermal protection system
- Parachute system. The parachute is triggered on re-entry by the pressure-initiated BAS (Beacon Activation System); it opens at an altitude of about 5 km
- Payload
The thermal protection system is made out of ceramic materials. The outer layer is a vacuum formed alumina sphere, coated with an ablative silicone. The next layer is composed by a layer of alumina blanket.
Payload items | Measurement objective |
GPS receiver | Position of the capsule during re-entry and after landing |
Pressure sensor | Pressure field on the surface of the capsule |
Thermocouple | Temperature on the surface and in the heatshield for reverse calculation of the heat-flux on the surface and in the heatshield |
Accelerometer | Acceleration of the capsule in the 3 axis |
Gyroscope | Attitude motion of the capsule |
Magnetometer | Orientation from the magnetic field |
Thermistor | Temperature of the PCB (Printed Circuit Boards) and critical components |
Telemetry: The location of the capsule during the re-entry is obtained by the telemetry data, in particular by the GPS receiver data. A new position is acquired every 2 seconds and sent together with the data from the scientific payload. The telemetry data is then retransmitted, interleaved by real-time data, after the high heat-flux phase.
Fotino recovery: The recovery of the capsule is made possible thanks to a beacon transmitting to the Argos DCS (Data Collection System), a payload which is flown on several weather satellites of NOAA and EUMETSAT. The beacon system is the primary recovery system, and is designed to be able to withstand several off-nominal cases, such as parachute failure and water landing.
The beacon, activated by a redundant system either by pressure or by a timer, sends its ID to the Argos DCS payloads, which will calculate its position via analysis of the doppler effect with an accuracy of about 100 m and communicate the result via internet.
YES2 Mission Status from Post-flight Analysis
The re-entry capsule of the Foton-M3 spacecraft landed safely on Sept. 27, 2007 in an uninhabited area 150 km south of the town of Kustanay in Kazakhstan, close to the Russian border. 26) 27) 28)
• On Sept. 25, the YES2 (Young Engineers' Satellite-2) experiment was activated and separated from the Foton-M3 spacecraft. The very first analysis indicated that the tether deployed slower than planned, it reached a length of 8.5 km before a preprogrammed command cut Fotino loose from the spacecraft which released the capsule on its way to Earth. On its reentry, the Fotino capsule experienced parachute breaking in the atmosphere and landed safely on Earth's surface. Although the full length of 30 km deployment couldn't be verified immediately, it was nonetheless a largely successful tether demonstration. 29)
• In November 2007, after weeks of careful analysis, the YES2 team has informed the ESA Mission Review Board of its findings: “All of the data we now have available point to the fact that the tether unwound fully before the Fotino capsule was released. This means that the most challenging part of the mission was completed and that YES2 smashed the world record for the longest man-made object flown in space.” 30) 31)
The team of engineers from ESA/ESTEC, and prime contractor Delta-Utec had been piecing together the events of 25 September using evidence from a number of direct and indirect sources. Some of the most important clues have been provided by the YES2 data stored in the TeleSupport Unit, which recorded all of the data from the ESA experiments on Foton-M3. This data included raw unprocessed data about the rate at which the tether was unwinding.
By looking at the data from the tether deployment speed sensors, the team was able to determine how much of the tether was unwound and how quickly it deployed. The analysis showed clearly that the deployment was accelerating in the later stages, rather than slowing down as was initially anticipated. Evaluating all evidence, the team also came to the conclusion that the tether deployed to a minimum of 29.5 km, or more likely to its full length of 31.7 km, at high speed.
Further indirect evidence comes from the orbital behavior of the Foton-M3 spacecraft. Data from the U.S. Space Surveillance Network, which was tracking Foton-M3 reentry sequence, show that the spacecraft moved about 1300 m higher in its orbit when the Fotino capsule was cut free from its tether, as expected for a 30 km tether. However, the tracking data offer no evidence that Fotino remained in orbit around the Earth, leading the YES2 team to conclude that it reentered the atmosphere immediately after its release.
Further deployment evidence in 2008: 32)
One of the other experiments on the Foton-M3 spacecraft, known as DIMAC (Direct Measurement micro-Accelerometer), has also been providing invaluable acceleration and orientation data. Figure 16 shows a fit of YES2 rate date (dark blue, loops per second vs. deployment time in the second stage, peaking at 65 Hz at deployment completion), as derived previously, vs. a recent spectrograph from RedShift's DIMAC accelerometers (green, yellow, red).
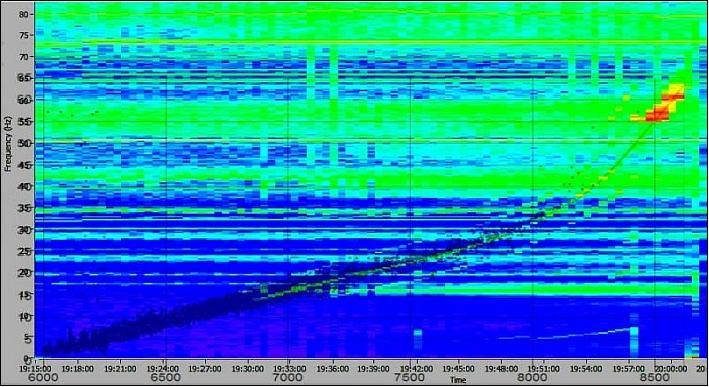
Amazingly, the rattling of the tether (with a mass density of only 0.2 gram/m) as it unwinds inside FLOYD is visible as accelerations on the 7000 kg Foton spacecraft, and shows up as a curve of high intensity in this plot of frequency vs. time. The match of the two independently determined curves provides direct evidence of the correctness of the deployment reconstruction by the YES2 team, as the overlay is near perfect, and confirms once more the full deployment of 31.7 km tether.
The long awaited DIMAC accelerometer data shed new light on YES2 and the workings and influence of the Foton attitude thruster. It is now confirmed that the tether deployment stopped at 8625 s, as suspected earlier. New is that it is now certain that the tether REMAINED attached when deployment completed and a swing back to the vertical was started! At the proper time the tether was cut. It also seems that Fotino was released at the right moment and deorbited into Kazakhstan. Features such as the stepper driver/barberpole activity can be clearly recognized, as well as the hold phase (gravity gradient tension), including longitudinal tether oscillations. During the swing, jerks such as those predicted are visible.
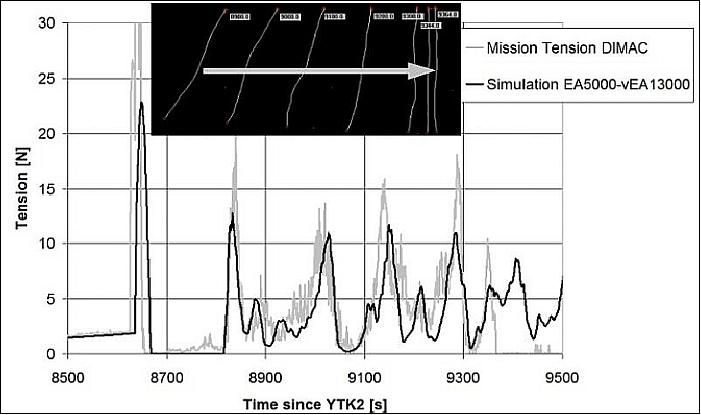
The Foton onboard DIMAC data shows accelerations of Foton resulting from disturbing forces. During the YES2 mission, one of the major disturbances is the YES2 tether tension. So in a way, the DIMAC was also a tether tension sensor. The data is high quality and very rich in information for YES2. An inspection of Figure 17 shows that:
• The tether deployment stopped abruptly at 8625 s, as expected. The DIMAC derived tension profile is generally consistent with the 31.7 km best fit deployment case reported in the YES2 data analysis report. Although it must be admitted that presently sensor drift makes it difficult to distinguish between deviations and drift effects (further analysis is forthcoming).
• A large shock (~30 N) followed in the sequence, this was higher than expected.
• The tether remained attached to Foton, so the piece of tape at the end did NOT come lose.
• The tether was cut from Foton according to the timeline (9364 s).
• It seems that the release of Fotino can also be confirmed from the data, there is a sharp drop in tension visible some seconds after Fotino release time (9344 s).
As of mid-2008, the extensive post-flight analysis verified so far that the YES2 deployer system functioned nominally throughout the reentry deployment sequence. This leads to the conclusion that the entire SpaceMail mission was completed, and Fotino was sent into a trajectory towards Kazakhstan, and must have landed upstream (roughly between Baikonur and the nominal landing point near Astana).
Summary: The YES2 experiment provided a large amount of data, including various independent measurements from which the deployment could be reliably reconstructed, as well as measurements of in-plane angle and tension signatures from different types of shockwaves. These data have been compared to the simulated deployment dynamics and the following could be concluded: 33)
• The tether and deployer performance was demonstrated to match largely the levels predicted in ground tests. The notable exception was the tether minimal deployment tension (stickiness), dominant in the inertia phase (first 1000 m), for which additional thermal-vacuum testing is recommended.
• The deployment velocity filter and brake controller behavior in flight could be qualitatively reproduced in detail by simulation matching. The control as performed in flight was demonstrated to be sufficiently effective to be capable of delivering the capsule into a predetermined target trajectory with the same level of precision as a conventional rocket system, despite the high level of tether stickiness.
Deployment irregularities in the first minute of deployment were unexpected and may be related to endmass dynamics interaction. Simple recommendations were identified that would make controller performance fully robust against such surprises. A controller resonance also occurred, which was reproduced in simulation, leading to a recommendation to analyze specifically and in detail controller performance in extreme cases. Measures to avoid such resonance were determined (faster brake actuation, design brake for less friction, tuned control gains).
• From Monte Carlo simulations a worst case deployment accuracy of better than 3% was predicted, comparing to the potential of the YES2 hardware as flown determined from the flight data of a deviation from target of only 0.5%.
• The simulation matching showed that the hardware model as used is sufficient to reliably predict tether deployment dynamics.
• The resulting simulated trajectory was confirmed to match the measured trajectory within the data accuracy level of 2-5º in-plane angle, confirming proper representation of deployment dynamics.
• Complex dynamics such as those resulting from bounces and resonance, including spring mass oscillations, transversal waves and reflecting sound waves, could all be properly understood and qualitatively reproduced.
• The tether's damping coefficient seemed significantly higher than expected (0.14) based on simple ground tests (0.08), whereas the stiffness was well predicted by such tests (5000-10000 N).
OWLS (Optical Wireless Link intra-Satellite)
Background: In the early 21st century, OWLS is an emerging onboard communications technology in spaceborne missions. The very first demonstration of an OWLS experiment was implemented on NanoSat-01 (launch Dec. 18, 2004 and operational as of 2006) of INTA (Instituto Nacional de Técnica Aeroespacial), the Space Agency of Spain. The OWLS demonstrator on NanoSat-01 consists of two experiments, both in diffuse configuration. The optoelectronic components (LEDs, photodiodes and optical filters) used are of COTS (Commercial-of-the-Shelf) grade parts. The NanoSat-01 demonstration consisted of two bus experiments. 34) 35)
• The first experiment performed an optical wireless transmission of the signals provided by the reference 3-axis magnetometer, to the OBC (On-Board Computer)
• The second experiment (OWLS- BER) established a closed loop link from the OBC to itself within its SPI bus (Motorola). In this case, ASK (Amplitude Shift Keying) subcarrier modulation is used, with a channel frequency of 4 MHz and selectable data rate by telecommand between some kbit/s and 1 Mbit/s.
The Foton-M3 OWLS experiment is also designed and developed at INTA, Madrid, Spain. The objectives of OWLS are: 36)
- Assessment and validation of the optical wireless technology for a future data-harnessing substitution in the Foton capsule
- To implement the CAN protocol (Controller Area Network) using an optical wireless physical layer. The wireless Foton experiment will be the first OWL-CAN implementation onboard a spacecraft.
The OWLS experiment will generate up to three types of data:
• Information about the Tx and Rx error-counters (inherent to CAN) for all the units (Master and µRTs)
• Raw data files sent from µRTs (Micro Remote Terminals) to Master Unit with a-priori known patterns, to be later checked. Also real-time computing of the BER (Bit Error Rate) on those patterns is possible
• Some temperature sensors will be added in order to acquire real data that could be correlated with data from the platform housekeeping sensors.
References
1) “ESA and Rosaviakosmos sign up for two Foton flights,” Nov. 3, 2003, URL: http://www.esa.int/esaCP/SEMF7OWLDMD_index_0.html
2) “Foton-M2 Mission,” URL: http://www.spaceflight.esa.int/documents/foton/overview.pdf
3) Andrew J. LePage, “Vostok: an aerospace classic,” The Space Review, April 11, 2011, URL: http://www.thespacereview.com/article/1821/1
4) “European experiments successfully launched aboard Foton spacecraft,” ESA, May 31, 2005, URL: http://www.esa.int/esaCP/SEMZDJ0DU8E_index_0.html
5) J. Thorstenson, S. Lundin, D. Titomanlio, “The Telescience Support Unit Onboard the Foton Spacecraft,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-A2.5.6
6) “TSU - Telescience Support Unit,” SSC, URL: http://www.prismasatellites.se/?id=8202
7) “TeleSupport-2-bis onboard Foton M2,” SSC, URL: http://www.prismasatellites.se/filearchive/3/3615/2005%20tsuengelsk.pdf
8) “Lift-off for Foton microgravity mission,” ESA, Sept. 14, 2007, URL: http://www.esa.int/SPECIALS/YES/SEMQDB13J6F_0.html
9) “Foton-M3 Mission,” ESA brochure, URL: http://esamultimedia.esa.int/docs/foton/FOTON-M3_brochure.pdf
10) http://www.redshift.be/projects/dimac.htm
11) Guillermina Castillejo Cucarella, Andrzej Cichocki, Maurizio Burla, “Development, test and flight results of the RF systems for the YES2 Tether Experiment,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-E2.3.6
12) Ilias Spiliotopoulos, Mathieu Mirmont, Michiel Kruijff, “Development and Flight Results of a PC104/QNX-Based On-Board Computer and Software for the YES2 Tether Experiment,” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
13) M. Kruijff, P. Hambloch, E. J. van der Heide, M. Stelzer, “The Second Young Engineers' Satellite (YES2),” Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-D2.3.04
14) Hironori A. Fujii, Michiel Kruiff, Erik J. van der Heide, Takeo Watanabe, Wubbo J. Ockels, “The Second Young Engineers’ Satellite: Innovative Technology through Education,” URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en_Leerstoelen/Afdeling_AEW...
15) A. Vavouliotis, D. Lamprou, V. Kostopoulos, J. Carlevi, E. Van der Heide, C. Menon, “Design Verification by FEM Analysis of ESA Young Engineers Satellite 2 Ejection System,” Proceedings of the IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-C2.P.06
16) A. Hyslop, M. Kruijff, C. Menon, “Simulating Space Tether Deployment on Earth for the YES2 satellite,” Proceedings of the IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-A2.1.09
17) V. Drakonakis, A. Miaris, A. Vavouliotis, R. Patricio, M. Kruijff, V. Kostopoulos, “Thermal Modelling of ESA Second Young Engineers Satellite,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06- C2.2.09
18) A. Vavouliotis, D. Lamprou, V. Kostopoulos, E. Van der Heide, M. Appollini, “Verification by analysis for the ESA 2nd Young Engineers Research Hardware,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-C2.P.1.08
19) “Students test 'space postal service' during Foton mission,” May 10, 2007, URL: http://www.esa.int/esaHS/SEMG3ZU681F_index_0.html#subhead3
20) “YES2 given green light for launch,” ESA, June 25, 2007, URL: http://www.esa.int/esaCP/SEMYZR8OY2F_index_0.html
21) M. Kruiff, “YES2 SpaceMail, Technical Summary,” March 10, 2006, URL: https://web.archive.org/web/20071010232538/http://www.yes2.info/YES2techsummary.pdf
22) S. Dueck, N.Gadhok, M. Kinsner, J. Kraut, T. Tessier, W. Kinsner, “YES2 DHS: A Space Tether Control Subsystem,” CCECE (Canadian Conference on Electrical and Computer Engineering), Montréal, Canada, May 4-7, 2003
23) “YES2 deployment in pictures,” URL: http://www.esa.int/SPECIALS/YES/SEMOZRGYX3F_0.html#subhead1
24) “YES2 as an ESA Education Project,” URL: http://esamultimedia.esa.int/multimedia/edu/YES2_Le_Bourget.pdf
25) F. De Pascale, M. Kruijff, “Fotino: design, manufacturing, testing of the capsule of the second Young Engineers' Satellite,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-E1.1.05
26) “Foton-M3 Experiments Return To Earth,” Space Mart, Sept. 27, 2007, URL: http://www.spacemart.com/reports/Foton_M3_Experiments_Return_To_Earth_999.html
27) Michiel Kruijff(, Erik. J. van der Heide, “Qualification and In-Flight Demonstration of a European Tether Deployment and Momentum Transfer System on YES2,” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en_Leerstoelen/A...
28) I. Spiliotopoulos, M. Mirmont, M. Kruijff, “Development and Flight Results of a PC104/QNX-Based On-Board Computer and Software for the YES2 Tether Experiment,” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en_Leerstoe...
29) “YES2 student payload released from Foton-M3,” ESA, Sept. 25, 2007, URL: http://www.esa.int/esaCP/SEMBBBC1S6F_index_0.html
30) “YES2 team claims a space tether world record,” ESA, Nov. 8, 2007, URL: http://www.esa.int/esaCP/SEMUI053R8F_index_0.html
31) M. Kruijff, M. Stelzer, “YES2 Post Flight Analysis Summary,” TN0113, Dec. 12, 2007
32) “DIMAC data analysis summary,” URL: http://www.redshift.be/projects/dimacres.htm
33) Erik J. van der Heide, Michiel Kruijff, Wubbo J. Ockels, “The YES2 Experience: Towards Sustainable Space Transportation using Tethers,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.D4.2.3
34) S. Rodriguez, I. Arruego, J. R. de Mingo, J. M. Oter, J. Iglesias, H. Guerrero, “Optical Wireless MIL-STD-1553 and Serial Synchronous buses for intra-spacecraft communications,” Proceedings of DASIA 2005 (Data Systems in Aerospace), Edinburgh, Scotland, May 30 - June 2, 2005
35) I. Arruego, H. Guerrero, M. Alvarez, A. Alvarez, S. Rodriguez, J. Torres, A. Santamaria, F. J. Lopez-Hernandez,” Optical Wireless Links for intra-Satellite Communications (OWLS): the merger of Optoelectronic and Micro/Nano-Technologies,” Proceedings of AIAA Nanotech 2002 Conference, Houston, TX, USA, Sept. 9-12, 2002
36) S. Rodríguez, A. Martín Ortega, J. R. De Mingo, I. Arruego, “Optical Wireless FOTON-M3 experiment,” Wireless for Space Applications Workshop, July 10-13, 2006, ESA/ESTEC, Noordwijk, The Netherlands
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).