Flying Laptop
EO
Operational (extended)
IRS
Flying Laptop (FLP) was launched in July 2017, as part of the Stuttgart Small Satellite Program, under the direction of the German Institute of Space Systems (IRS). The primary mission objective is to test ten different small-satellite technologies, in preparation for follow-up missions. Each technology was designed by ten different doctoral students, each at the University of Stuttgart, Germany, working alongside various specialist industrial manufacturers. Additionally, FLP carries scientific instruments for multispectral Earth observation as well as spaceborne maritime ship surveillance.
Quick facts
Overview
| Mission type | EO |
| Agency | IRS |
| Mission status | Operational (extended) |
| Launch date | 14 Jul 2017 |
| CEOS EO Handbook | See Flying Laptop summary |
Summary
Mission Capabilities
The Multispectral Imaging Camera System (MICS) is designed to image selected targets across multispectral bands and from a range of different angles. A Bi-directional Reflectance Distribution Function is equipped onboard the FLP to facilitate a ‘spotlight’ altitude mode, rotating the spacecraft in its orbit for fixed-angle viewing. A second scientific objective is the use of star trackers (STR) for the detection of Near Earth Objects (NEOs). NEOs are any celestial objects (asteroids, meteoroids etc.) which pass close to Earth on their orbit. FLP’s new detection software is hoped to aid NEO avoidance protocols in the future. The final scientific goal involves utilising an Automatic Identification System (AIS), in combination with the MICS, for the observation of ship traffic. FLP will join the wider AIS infrastructure to prevent maritime collisions and help neighbouring coastal states communicate the passage of ships and their cargo.
FLP is also the first satellite to test the DLR’s Optical Space Infrared Downlink System, equipped with the OSIRISv1 instrument. Two fixed lasers are aimed towards ground stations in Europe, Japan and Canada, transmitting data at far higher bandwidths than traditional radio frequency (RF) communication.
Performance Specifications
The MICS is able to capture images across three spectral bands: green (530 - 580 nm), red (620 - 670 nm) and near infrared (NIR, 835 - 885 nm). The instrument has a ground sampling distance of 20 m while projecting a swath width of 20 km. The integrated star-tracking NEO detection system has a fine pointing accuracy of less than 2 arcsec. In combination with the micro Advanced Stellar Compass (µASC), the satellite is able to orientate itself at 10º/s. Flying Laptop orbits in a sun-synchronous polar circular orbit, at an altitude of 600 km and inclination 97.6º.
The OSIRISv1 instrument has a maximum data transmission rate of 200 Mbit/s, and output laser power of 1 W. The optical signal propagates at a wavelength of 1550 nm, enabling a high bandwidth.
Space and Hardware Components
The satellite bus incorporates a three-axis stabilised attitude control system (ACS) with two star trackers (STR). In order to perform the satellites various technological and scientific objectives four pointing modes are available to FLP: nadir, inertial, target and sun pointing.
The 120 kg FLP can generate a maximum of 270 W of electric power via its deployable solar panel array, supplying a background energy consumption of 40 W and instrument power requirements of approximately 100 W (orientation dependent). FLP communicates with ground stations via a S-band RF signal, allowing for compatibility with both its dedicated ground stations and also professional ground stations. Despite the design lifetime of two years, all components are still functioning as intended and FLP continues to supply observational data. OSIRISv2 and OSIRISv3 were hosted onboard the BiROS satellites and ISS respectively.
Flying Laptop
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
Overview
Flying Laptop (FLP) is the first minisatellite of the IRS (Institute of Space Systems - Institut für Raumfahrtsysteme) at the University of Stuttgart, Germany. The primary mission objective is to demonstrate and qualify new small-satellite technologies for follow-up missions as summarized in Table 1.
Technology introduction | Functions to be demonstrated |
UT 699 LEON 3 FT microprocessor | High-grade main OBC (On-Board Computer) |
SpaceWire application on university small satellites | Communication between core control units via SpaceWire |
CCSDS protocol for communications | Standardized RF communication protocol |
New implementation design for recovery of S/C control functions through PCDU (Power Control and Distribution Unit) | - Reconstitution procedure of LEON3FT OBC components |
Lithium iron phosphate (LiFePO4) battery | Use as secondary power source |
High-efficiency solar cell test string | Part of primary power source |
ACS (Attitude Control Subsystem) components for a pointing performance ≤ 150 arcsec | Highly accurate ACS for communication and multiangular target pointing by adjusting the complete satellite |
New implementation method for a solar panel release mechanism | Deployment of side solar panels |
Payload OBC | Support of payloads with FPGA computing capability |
Experimental laser link system OSIRIS | High-speed optical communications |
The Flying Laptop project is being developed at IRS. The satellite's subsystems and key functions such as the on-board software and the FDIR (Failure Detection, Isolation and Recovery) concept are allocated to about 10 doctoral candidates. All components, except the ACS (Attitude Control Subsystem ) units, are new developments and mostly engineered in cooperation with industry. While specifications are composed according to mission and project requirements by the students, the satellite component quality benefits from the experience and the industrial procedures that are applied at a professional supplier company. The project progress is observed and supported by the project manager at IRS. In addition, two project advisors (former IRS students) from Airbus DS in Friedrichshafen, and one from Tesat-Spacecom GmbH in Backnang, Germany, support the satellite development with their technical knowhow and management advice.
The mission objectives of Flying Laptop include also scientific observations. 2)
• One goal is to use MICS (Multispectral Imaging Camera System) for various scientific Earth observation experiments. Particular targets will be imaged in multispectral bands from different angles in support of BRDF (Bi-directional Reflectance Distribution Function) studies. This in turn implied the introduction of a "spotlight" attitude mode, in which the complete spacecraft is rotated in its orbital path for target fixation. In Flying Laptop notation, the spotlight mode is also referred to as "Target Pointing Mode." 3) 4) 5)
• A further scientific mission goal, conducted in cooperation with the DTU (Technical University of Denmark), is to utilize the satellite's star trackers for the detection of NEOs (Near Earth Objects). NEOs are asteroids and meteoroids whose trajectories are passing Earth in relatively close orbits.
• A further scientific mission goal is the observation of ship traffic. By means of an AIS Receiver in combination with the optical observation of MICS the spaceborne ship surveillance shall be evaluated.
Spacecraft
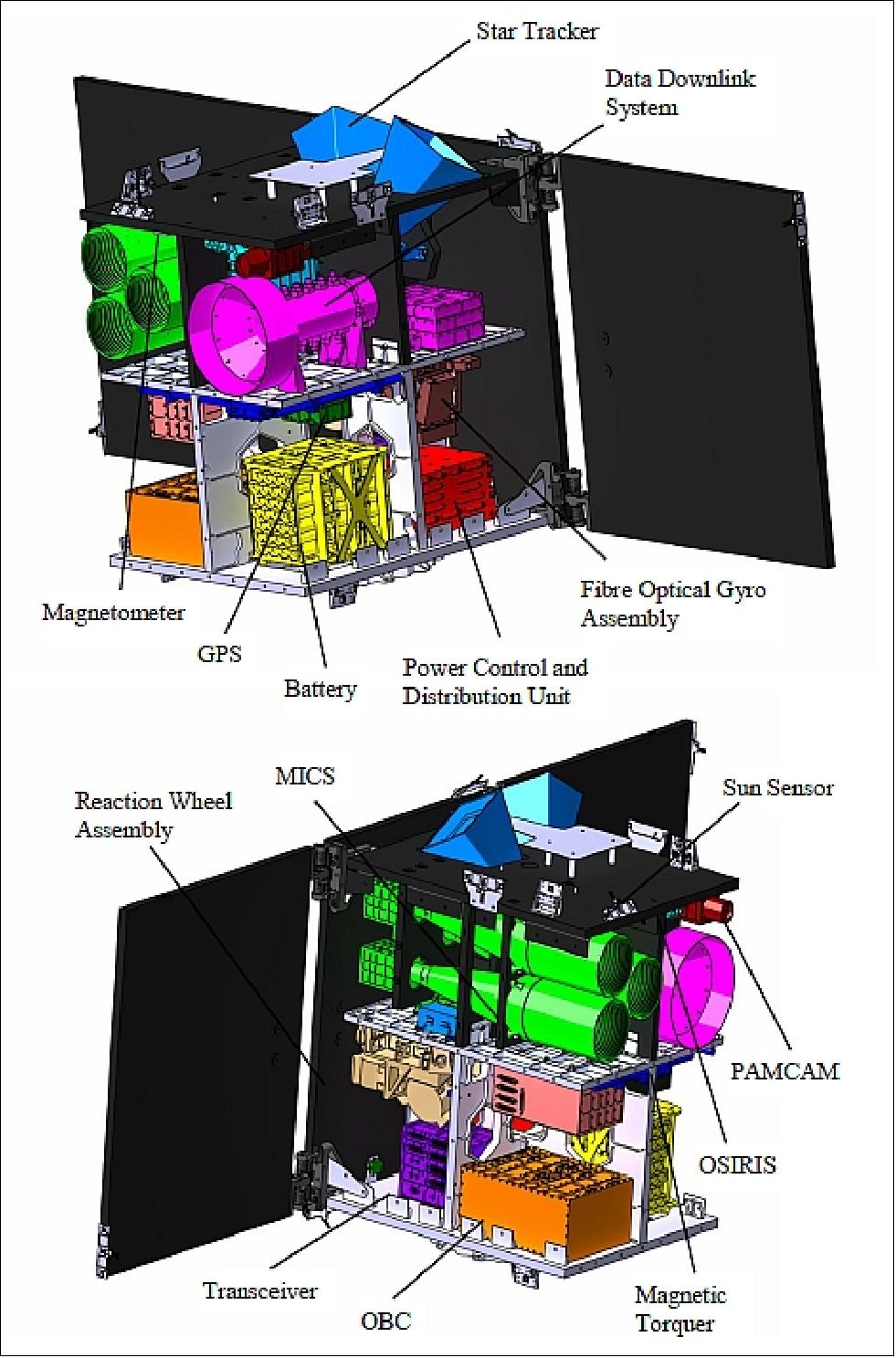
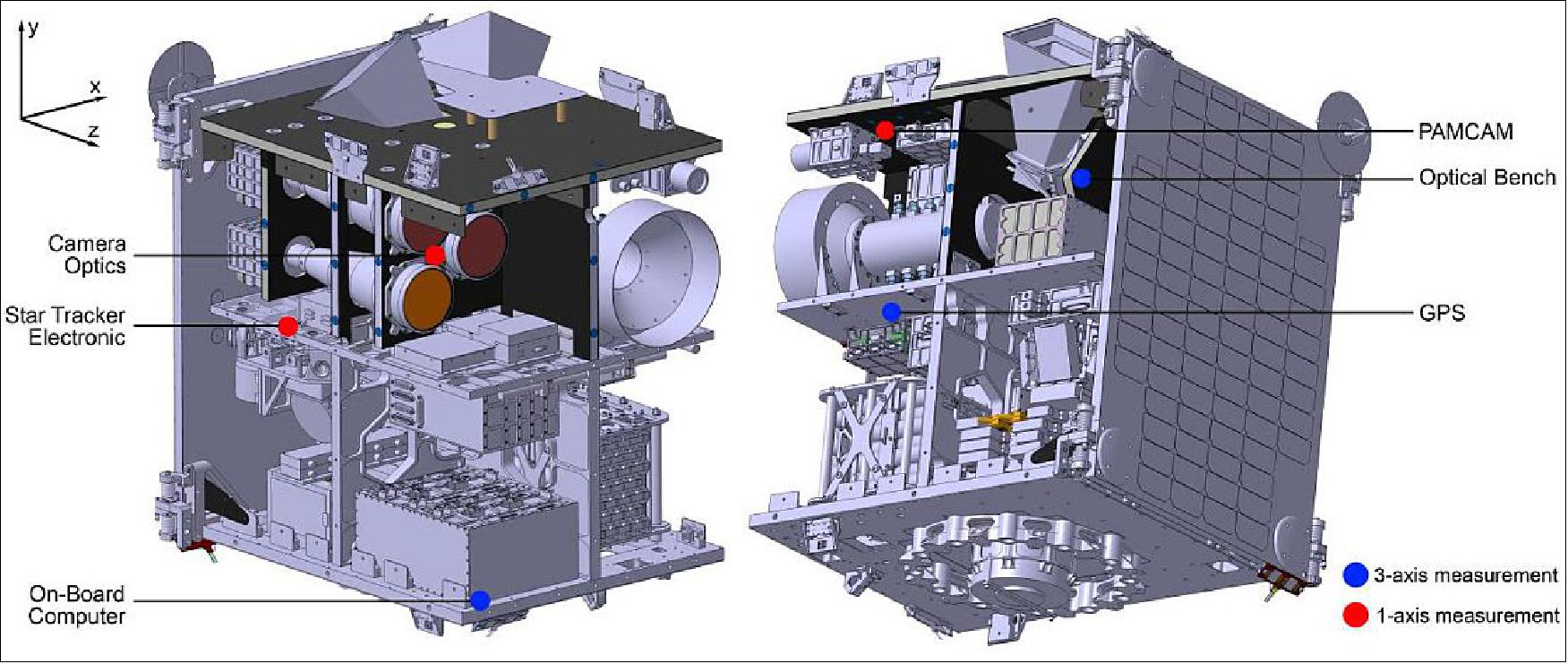
Like most satellite projects, the Flying Laptop experienced several reconfigurations throughout its development life. Reshaping the design was necessary due to payload changes, but also due to changing mission requirements . The new configuration is shown in Figure 2 (Ref. 2).
The spacecraft structure is a box of size 60 cm x 70 cm x 90 cm with a total mass of ~ 120 kg and a design life of 2 years. The design is modular. The mechanical structure of the satellite allows a convenient access to the internal components and ensures simultaneous integration of the modules. The lower part consists of integral aluminum parts and therefore offers a cost-effective and precise assembly, adjusted force transmission and good thermal properties. The upper part, where the optical systems are installed, consists of carbon‐fibre reinforced sandwich structures. These offer a low mass, high stiffness as well as low thermal longitudinal expansion to provide a stable calibrated alignment of the cameras in the satellite and to each other. The system design is one-failure tolerant to provide secure operations and to preserve system functions. All optical instruments are mounted onto an optical bench, consisting of a CFRP (Carbon Fiber-Reinforced Plastic) sandwich with an aluminium honeycomb core, to insure optical alignment and to minimize thermal expansion effects. Flying Laptop is a low-cost project by using COTS (Commercial-Off-The-Shelf) components whenever possible. 6) 7) 8) 9) 10) 11) 12)
Application/Subsystem | Component | Function |
C&DH (Command & Data Handling) | OBC (On-Board Computer) | Monitoring and control of the spacecraft |
EPS (Electrical Power Subsystem) | PCDU (Power Control & Distribution Unit) | - Power regulation and distribution |
Solar panels | Primary energy source – GaAs solar cells with an efficiency of 25.3% for a max power generation of 269.2W with 3 solar panels at 1 m2 surface area | |
Battery | Secondary energy source: Three LiFePO4 cell strings with a capacity of 35 Ah for high power operations and eclipse phase, nominal voltage of 23.1 V. | |
Harness | Data and power connections between on-board components | |
ACS (Attitude and Control Subsystem) for 3-axis stabilization | Reaction wheels | Main actuator to control satellite's attitude by changing the momentum of spinning wheels, 4 units in tetrahedron configuration |
Magnetorquer | Secondary actuator for emergency situations and LEOP, also used for wheel desaturation, redundant electro-magnetic coil for each axis which is producing a control torque by interacting with Earth's magnetic field | |
Star Trackers | Measurement of attitude with the help of star constellations, two camera head units to avoid blinding | |
FOGs (Fiber Optic Gyros) | Measurement of rotational rate, 4 units in tetrahedron configuration | |
Coarse sun sensors | Acquisition of sun direction, at least two redundant units for each axis | |
GPS receiver | Acquisition of position and speed of satellite, three redundant units | |
Spacecraft structure | Bus | Supporting chassis (box structure) for on-board components |
Retaining/deployment mechanism | Mechanism to fix the side solar panels during transport and launch. The fuse wires, which fasten the deployment mechanism for the side solar panels, are melted in orbit | |
De-orbit mechanism | Deployable foil with an maximum expanse of 2.5 m x 2.5m to facilitate de-orbiting within 25 years | |
TCS (Thermal Control Subsystem) | SSM Radiator | Radiation of dissipated energy to space |
MLI | Insulation cover of the satellite protecting form temperature differences of space | |
RF communications | Transceiver system | - Consists of Telecommand (TC) receiver and Telemetry (TM) transmitter, both are operated in S-band |
Payload | ||
Optical communications | OSIRIS (Optical high-Speed Infrared Link System) | Laser link terminal for optical data transmission up to 100 Mbit/s at 1550 nm |
Payload OBC |
| Monitoring and control of the payloads and data handling with SRAM FPGA |
MICS | Multispectral Imaging Camera System | Earth Observation in three spectral bands: |
PAMCAM |
| Panoramic image acquisition for orientation purposes |
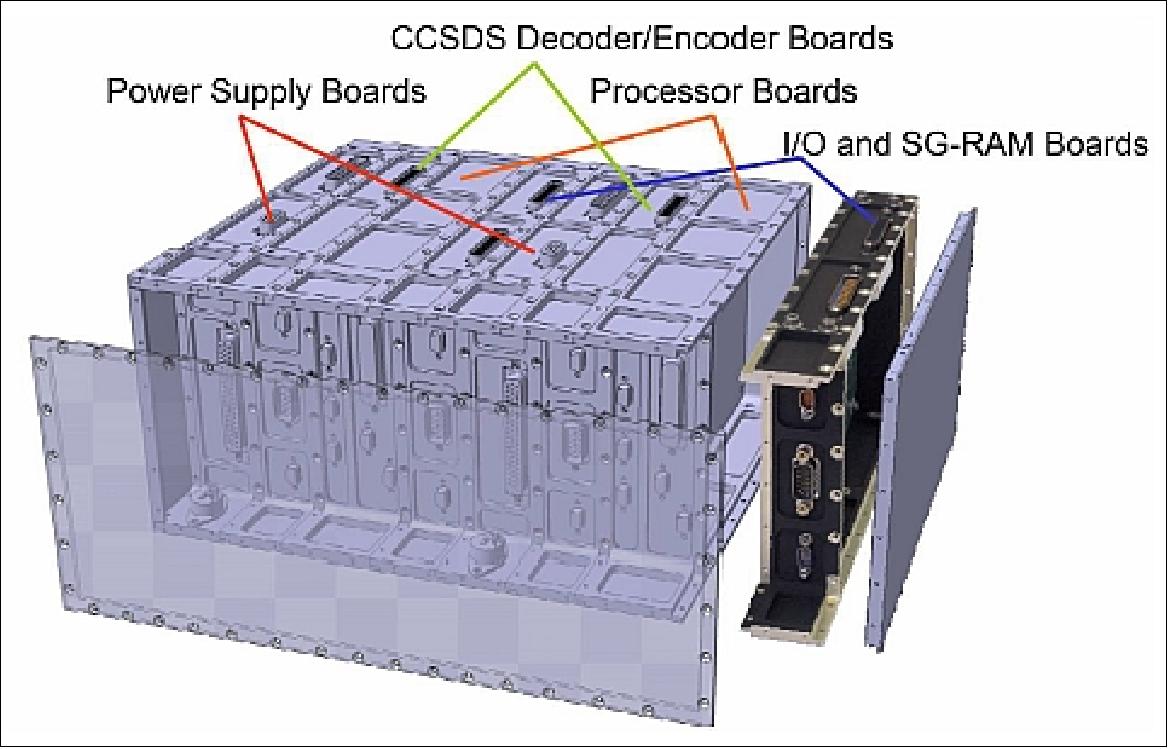
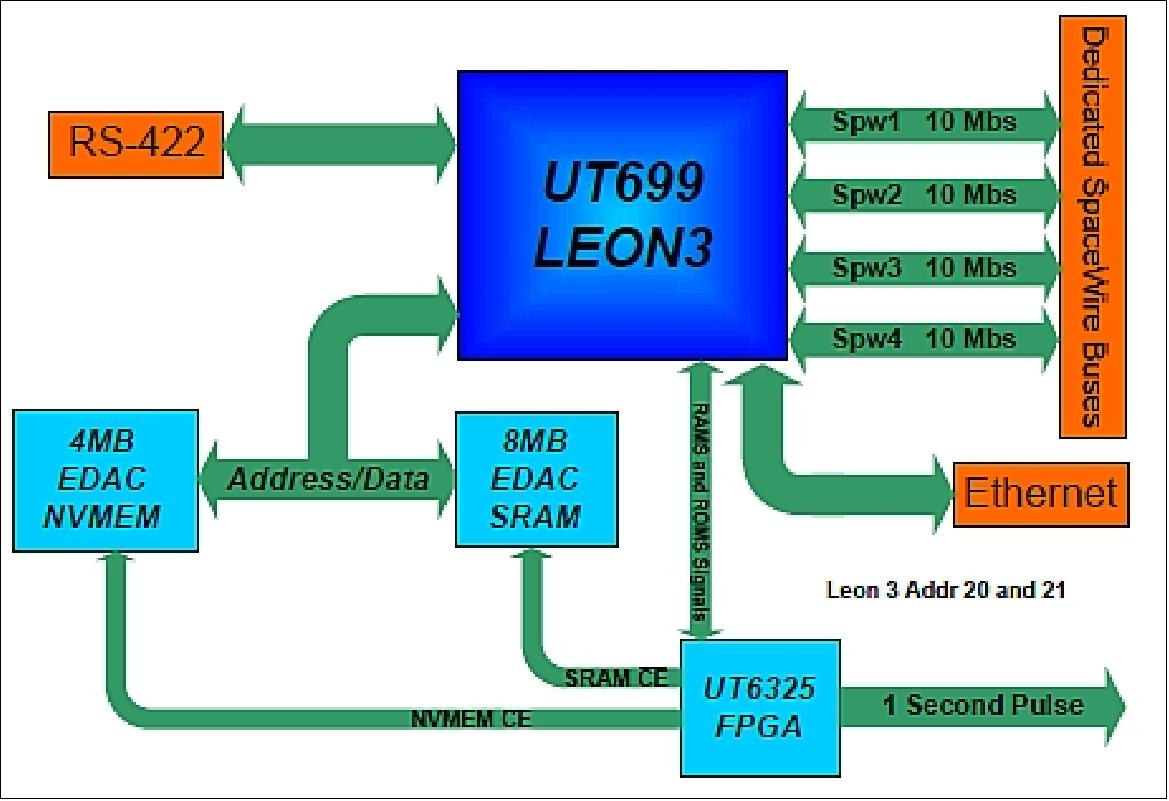
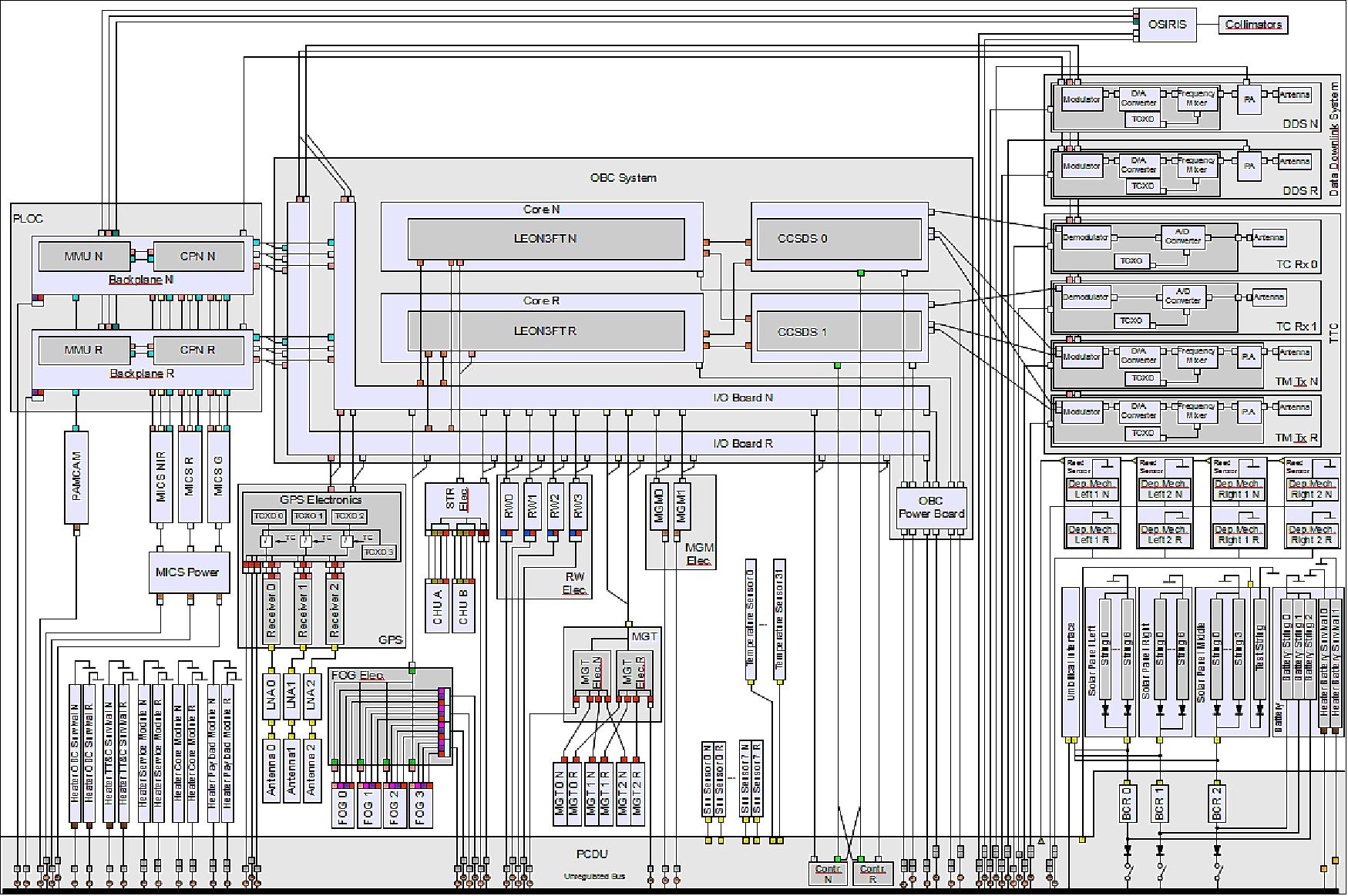
OBC (On-Board Computer): A main requirement is the development of an ultra compact and high-performance OBC, intended to support a RTEMS (Real-Time Executive for Multiprocessor Systems) operating system, a PUS (Packet Utilization Standard) standard based onboard software (OBSW) and a ground/space communication standard based on CCSDS (Consultative Committee for Space Data Systems) protocols. The OBC system consists of four functionally differing boards (Table 3). Each board is available twice for redundancy reasons. All boards are cross-coupled via SpaceWire with a maximum transfer rate of 10 Mbit/s (Ref. 2). 13) 14)
OBC core board | - features a UT699 LEON3 with a fault tolerant 32 bit SPARC V8 microprocessor from Aeroflex Gaisler |
I/O board | - is operated by a radiation-tolerant flash FPGA with non-volatile memory, implemented by 4Links |
CCSDS TM/TC board | - similar technical composition as the I/O board, but less digital interfaces |
PCDU | - a reconfiguration unit being embedded in the PCDU (Power Control and Distribution Unit) |
The C&DH (Command and Data Handling) functions in the on-board S/W are based on ESA's PUS implementation. PUS describes the transfer of TC and TM data between ground and satellite. In nominal support operations, only one OBC core board and one I/O board are activated controlling the satellite. Since both OBC core boards are cross-coupled to both I/O boards, every link configuration of the boards can be applied for operations. Hence, there are 4 connections available for Flying Laptop to provide failure tolerance against failing boards. To safeguard the accessibility of FLP, two CCSDS boards are available. Both CCSDS boards are operated in parallel and are each connected to one transceiver. As the designation of the boards indicate, the FLP is applying the CCSDS standard as communication protocol for S/C telecommands (TCs) uplinked from ground as well as telemetry (TM) transmitted to ground. All PCBs (Printed Circuit Boards) of the OBC are scaled according to a 3U Eurocard size and mounted into an aluminum frame. The single frames are stacked together and cross-strapped under the front panel (Figure 3). All interfaces that connect to the remaining S/C components are located on top of the stack.
The OBC boards are SBC (Single Board Computers) designed around the Aeroflex LEON3FT (Fault Tolerant) processor. The LEON3FT is a 32 bit SPARC TM V8 microprocessor with a number of available on chip interfaces including cPCI, SpaceWire and CAN. The OBC boards are implemented with the SpaceWire interface as the primary method of in flight communication. OBC memory resources include 8 MB of on board SRAM and 4 MB of non-volatile memory. Both the SRAM and non-volatile memory interfaces have the LEON3FT on chip EDAC (Error Detection and Correction) designed into the board. The EDAC is capable of detecting two errors on the SRAM or NV memory bus and correcting one. All 4 of the LEON3FT SpaceWire ports have been implemented on the OBC and the data rate is set to 10 Mbit/s. 15) 16)
In addition, ports 3 and 4 support the RMAP (Remote Memory Access Protocol) that gives the user the ability to DMA data directly into SRAM from either port 3 or port 4 SpaceWire interfaces.
EPS (Electrical Power Subsystem): Electrical power is being provided by three solar panels, two of which are deployable (total area of approx. 1 m2). Use of triple-junction GaAs solar cells with an efficiency of 25.3%. In addition, the satellite is being used as an on-orbit testbed for atest string of a new generation of 100 µm 3G triple junction solar cells.
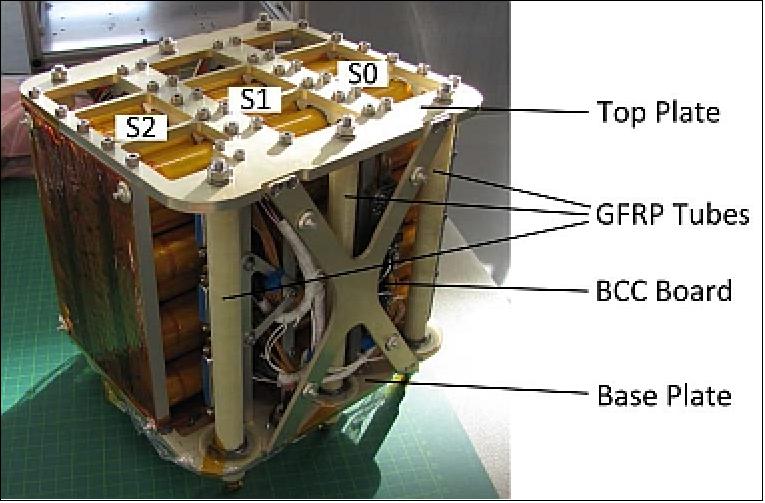
Battery: To achieve a low total cost of the battery system, commercial off-the-shelf Lithium iron phosphate cells manufactured by A123 Systems are used. The system consists of three battery cell strings, yielding a total nominal voltage of 23.1 V and a total nominal capacity of 35 Ah. As the battery cells are susceptible to overcharging, a charge control system to report overvoltages to the PCDU (Power Control and Distribution Unit) is part of the battery system. Furthermore, a simple cell balancer design using bleed resistors is implemented. In order to keep the temperature within the operational temperature range of the cells, the battery system is thermally isolated from the rest of the satellite system by means of multi-layer insulation and glass fiber reinforced plastic parts. 17)
The battery system consists of three battery strings, one for each solar panel. The battery strings for the two deployable solar panels consist of 35 battery cells each, with blocks of five cells in parallel and seven of these blocks in series , yielding a total nominal capacity of 12.5 Ah at a voltage between 18.9 V and 25.2 V. For the string connected to the body mounted solar panel, there are only four cells in parallel, reducing the nominal capacity to 10 Ah, because of the fewer solar cells and the higher temperature of this panel. Thus the whole battery has a nominal capacity of 35 Ah. The mass of the battery system is ~10 kg, its dimensions are 21 x 20 x 20 cm.
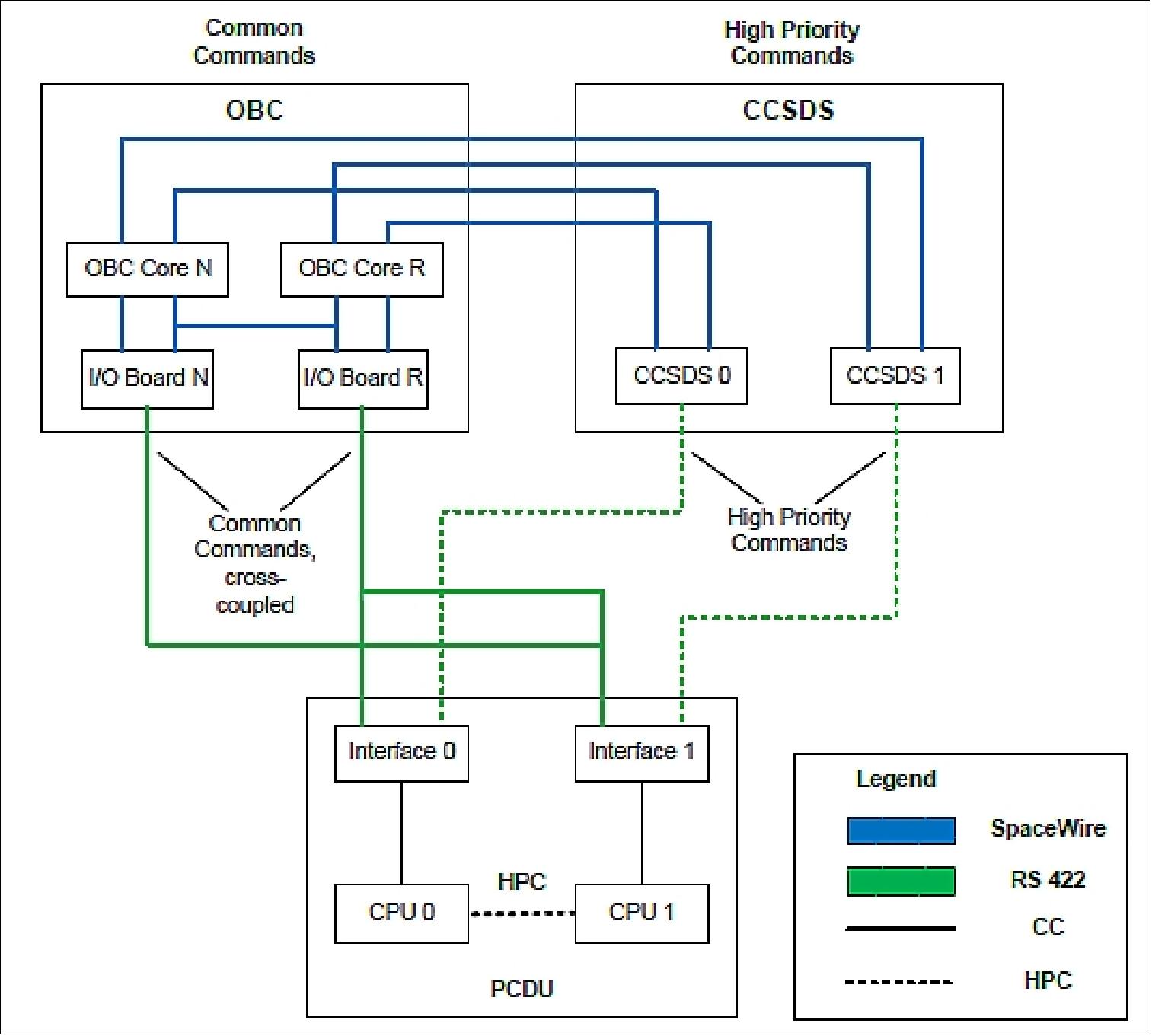
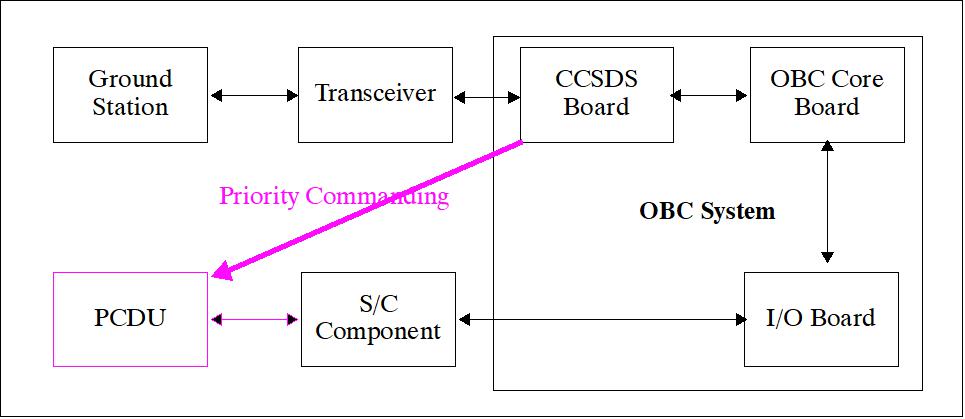
The PCDU (Power Control and Distribution Unit) functions exceed the conventional functional scope of power distribution units. Besides the classic power distribution and regulation functions ,the PCDU serves additionally as the reconfiguration unit for the OBC sub units - processor boards, I/O- and CCSDS boards. The communication between OBC and PCDU is performed via CCs (Common Commands) with a working OBC core board, I/O board and PCDU (Figure 6).
For CC communications, the PCDU provides nominal and redundant cross-coupled, fullduplex communication interfaces in RS422 level (8-N-1) with a baud rate of 115200. The PCDU confirms the proper reception of every command sent by the OBC with a confirmation return. In this way, the OBC supervises power regulation and can request PCDU acquired TM.
The PCDU is being developed in cooperation with an experienced industrial partner (Vectronic Aerospace, Berlin). The device represents the independent monitoring unit for the OBC system and facilitates its operational recovery. Important housekeeping data that is collected at the PCDU is polled by the OBC in a regular interval of 10Hz by a Common Command. If the PCDU is not being polled as specified, a fault of the OBC system is probable.
The PCDU has a size of 220 mm x 160 mm x 118 mm and a mass slightly over 4 kg. Five frame stacks, each corresponding to one PCB, are assembled to a single unit and closed by a cover plate. The PCDU is designed radiation tolerant to at least 20 krad in order to account for the radiation load that is to be expected for a mission life of 2 years. A PCB internal heating for the CPU PCB facilitates the fast warming up to -20ºC in order to prevent damaging of electronic parts due to thermal tension over high temperature gradients. The PCDU is qualified to a lower temperature limit of -40ºC for operational use in order to increase the availability of the PCDU and thus S/C system safety.

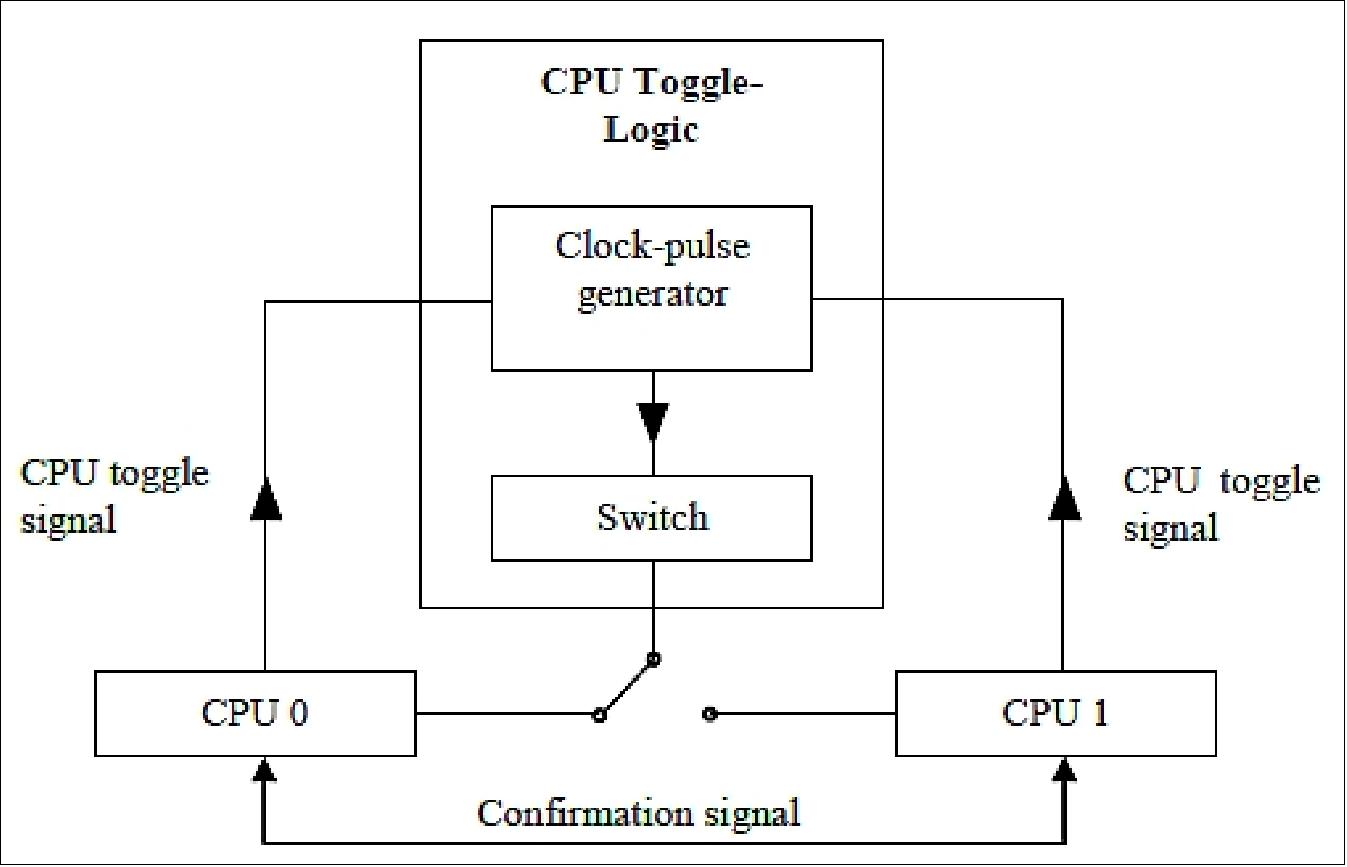
Considering the importance of the PCDU for satellite operations a single-point failure tolerant design is particularly realised for C&DH functions inside the unit. Two redundant Central Processing Units (CPUs) are implemented in the PCDU. Both are operated in a hot-redundant concept with a master and a slave unit. The master unit performs all actions, whereas the slave monitors the master. Both CPUs are connected by a toggle logic, which switches the master unit as soon as the currently operating CPU is not responding any more. The master CPU is sending a confirmation signal in a specified period in order to confirm its operability. If this condition is not met, the slave unit commands the toggle-logic to switch the master unit (Figure 8).
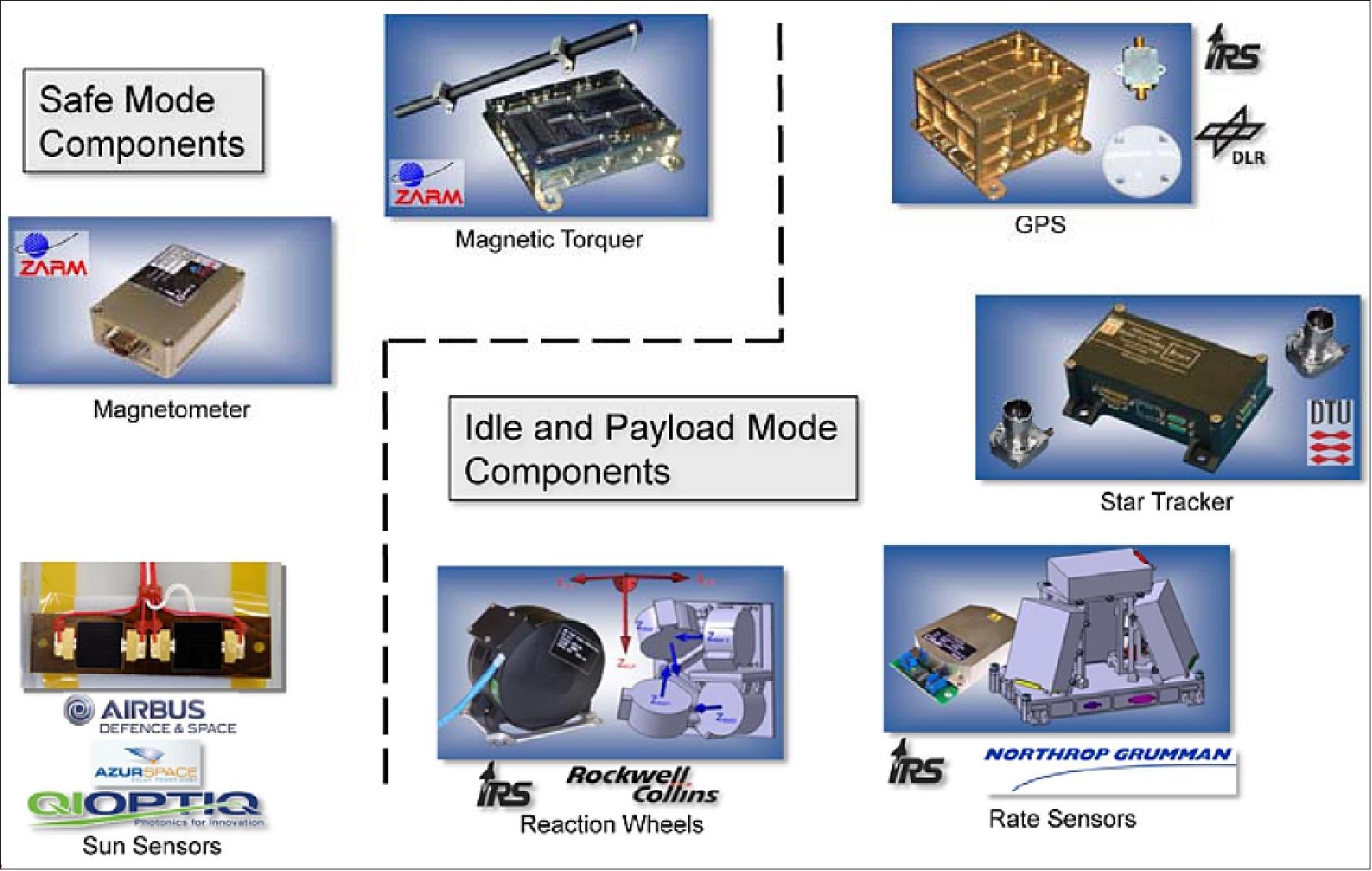
ACS (Attitude Control Subsystem): Flying Laptop is 3-axis stabilized. The requirements call for high-accuracy pointing (150 arcsec or 0.042º) and agile maneuvering capabilities for the imaging mission. The ACS actuators feature four reaction wheels and three magnetic torquers (these are torque rods for momentum dumping of the reaction wheels). Attitude sensing is provided by two 3-axis magnetometers, eight coarse sun sensors (6º rms pointing), four fiber-optic rate sensors, one autonomous star tracker (fine pointing accuracy of < 2 arcsec), and three GPS receivers (GENIUS). 19) 20) 21)
Pointing knowledge, absolute | ±7 arcsec (±1 pixel) |
Pointing knowledge, relative | ±2.5 arcsec (±1/3 pixel) |
Pointing accuracy | ±150 arcsec (± 20 pixel) |
Following is a description of the various ACS and S/C subsystem components:
• In this context, GENIUS (GPS Enhanced NavIgation system for the University of Stuttgart microsatellite) is an onboard experiment being conducted in cooperation with DLR/GSOC (Figures 9 and 10). GENIUS consists of three COTS Phoenix GPS boards. Each of the receivers is connected to separate GPS antenna via a low noise amplifier. The antennas of three separate GPS receivers are being placed on three corners of the body-mounted central solar array in an L-shape configuration. The GENIUS performance offers real-time position, velocity and timing information with estimated accuracies of 10 m, 0.1 m/s and 1 µs, respectively (in addition attitude is being provided). The Phoenix GPS receiver is a commercial GPS receiver board with a new DLR/GSOC developed firmware for space and high dynamics applications. The receiver has 12 tracking channels and is able to measure phase and Doppler shift of the GPS-L1 carrier signal.
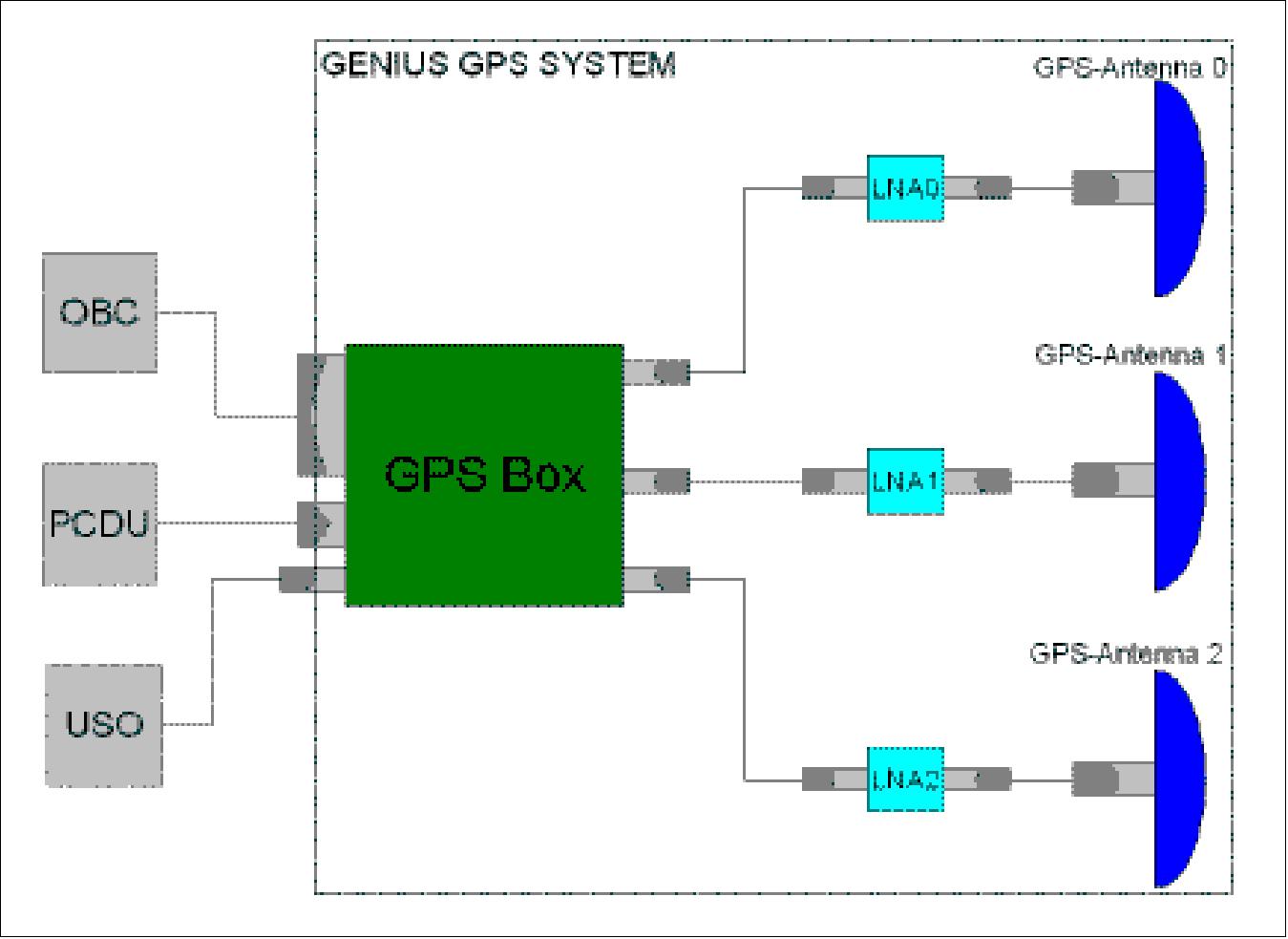
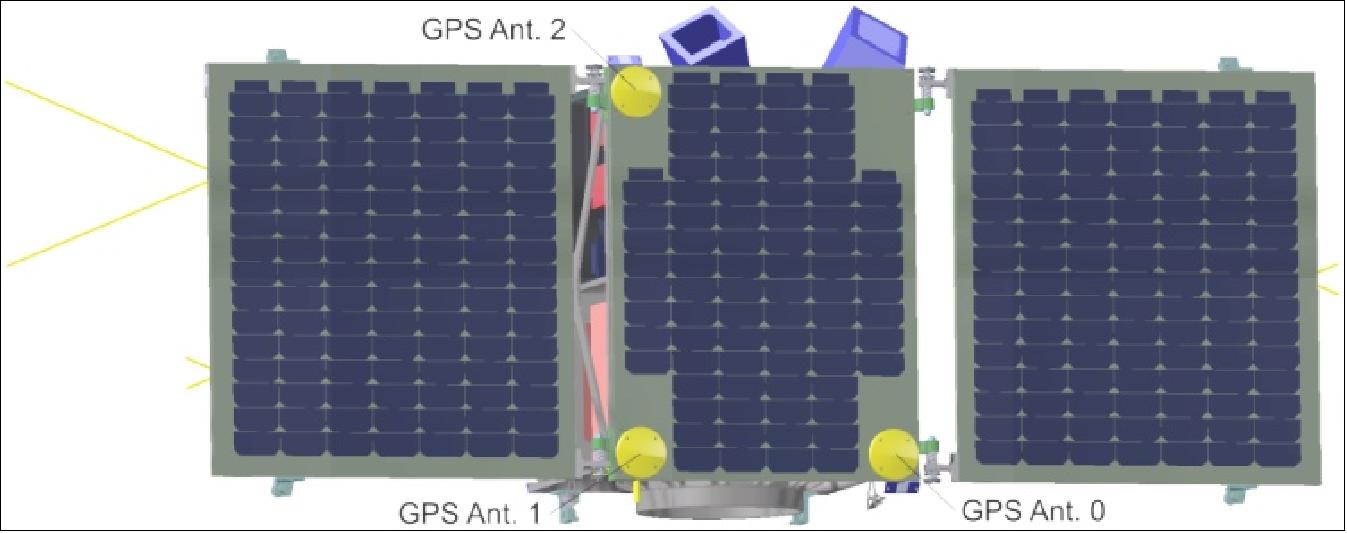
The GENIUS GPS system consists of three independent GPS receiver boards, each connected to a separate antenna and low noise amplifier (LNA) as shown in Figure 9. The GPS Box is connected to the on-board computer (OBC) and the power control and distribution unit (PCDU). The used Phoenix boards are commercial 12-channel GPS L1 receivers with a DLR/GSOC developed firmware for space and high dynamics applications. Three GPS antennas are mounted on the middle solar panel in an L-shaped arrangement, creating two baselines with a length of 440 mm and 610 mm respectively (Figure 10). The three GPS receivers are integrated in a single 100 mm x 80 mm x 67 mm box together with an interface board for RS-422 conversion. To achieve a high level of redundancy, each receiver can be switched on/off independently varying the system input power from 0.9 W for 1 receiver to 2.6 W for all 3 receivers according to measurements at the testing model.
An algorithm based on a Kalman Filter is used to process the measurement data and produce an offline attitude solution which will be compared to the attitude information available from the satellite's star camera. The algorithm uses the lambda-method to resolve the integer ambiguities of the double differences of the carrier phase measurements. These resolved double difference ambiguities are then used to fix the single difference ambiguities in the filter. Hence, the algorithm provides a seamless transition from the ambiguity resolution to the attitude determination.
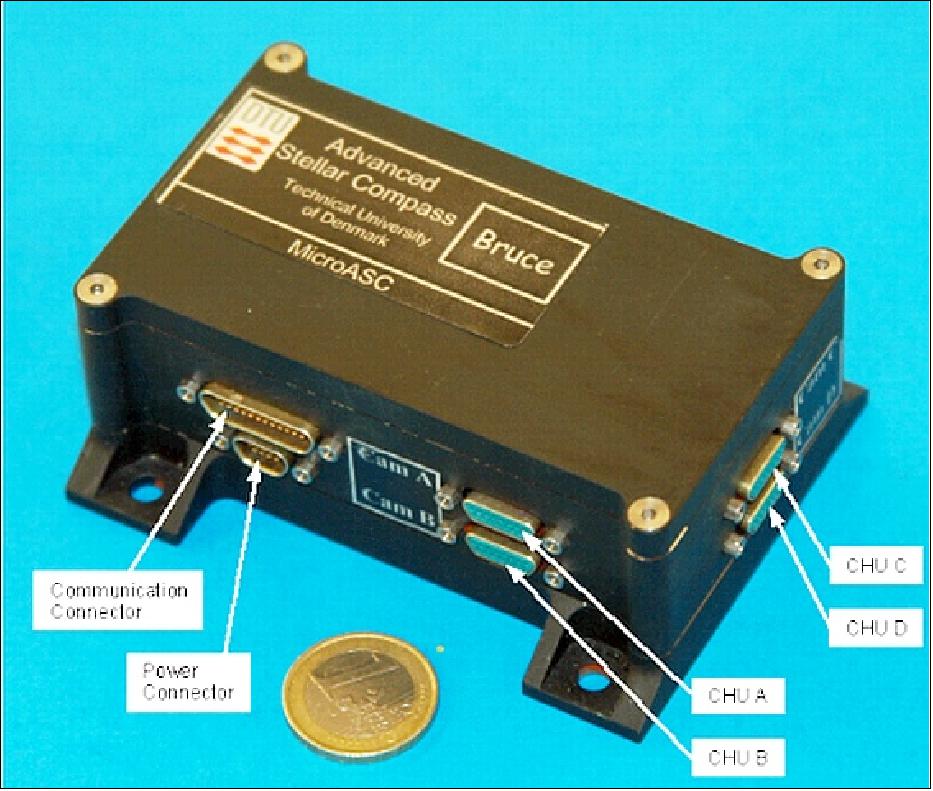
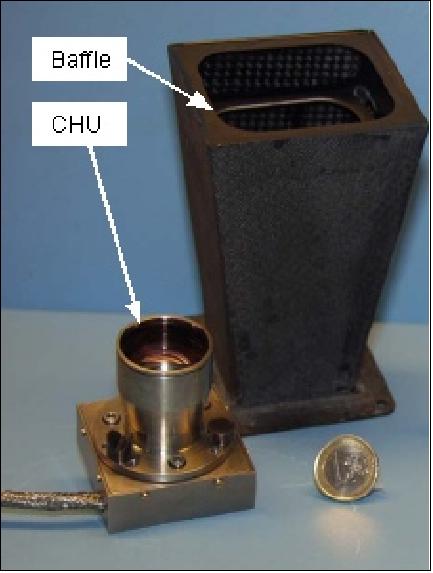
• STR (Star Tracker): The autonomous star tracker in the ACS configuration is the newly developed µASC (micro Advanced Stellar Compass) of DTU (Technical University of Denmark), Lyngby, Denmark. In fact, µASC is of ASC heritage flown on Ørsted, SAC-C, CHAMP, GRACE, ADEOS-2, SMART-1, GOCE, etc. The µASC instrument is physically divided into a µDPU (micro Data Processing Unit) with hot/cold redundancy and CHU (Camera Head Unit), a µDPU may drive up to 4 CHUs (2 CHUs are being used on Flying Laptop). The intrinsic accuracy of an attitude measurement from a single CHU is better than 1 arcsec at an integration time of 0.5 s. This attitude is autonomously calculated based on all brighter stars in the FOV of the CHU. The µASC on Flying Laptop provides a pointing knowledge within 2 arcsec. Furthermore, µASC delivers attitude information at S/C angular rates of up to 10º/s and thus enables rapid repointing of the platform to any object. This attitude is autonomously calculated based on all brighter stars in the FOV of the CHU. The µASC on Flying Laptop needs to provide a pointing knowledge of one pixel at 7.4 arcsec.
The use of µASC on Flying Laptop is an early spaceborne demonstration of this instrument. Currently PROBA-2 is another mission under development using the µASC device. 22)
• The three magnetic torque rods employed are developed by ZARM Technik, Bremen, with a linear dipole moment of 6 Am2. The torquers are connected to a power box that includes two I2C buses for connection to the OBC. The whole system is single redundant.
• Magnetometer: ZARM Technik provides also the AMR (Anisotropic-Magneto-Resistive) magnetometer, a microcontroller-based 3-axis magnetometer with digital output. Two magnetometers are being installed on the microsatellite. The Earth's magnetic vector field is being used as input information for the magnetic torquers (detumbling after launcher separation, etc.). The ARM sensor is the HMC-1023 model of Honeywell.
• The angular rate of the S/C is measured with 4 single-axis COTS fiber optic rate gyros (FOGs) in a tetrahedron configuration. The sensors employed are C-FORS (Commercial Fiber Optic Rate Sensor) of Litef. The complete FOG assembly has a mass of ~1.7 kg.
RF communications: For telemetry and telecommand, S-band (low and high gain) antennas are being installed on the satellite. The S-band command uplink has a frequency at 2.068 GHz, a telemetry downlink at 2.245 GHz, and a data downlink at 2.425 GHz.
Flying Laptop also features commanding by so-called HPCs (High Priority Commands) of the PCDU in case of an emergency, indicated by the red colored communication path in Figure 15.
The microsatellite will be operated by students at IRS (Institut für Raumfahrtsysteme), of the University of Stuttgart. The existing ground station on campus is being upgraded to permit satellite communications in the following frequency bands: UHF, and S-band.
Project Development Status
• March 9, 2017: The Flying Laptop passed its Flight Readiness Review as well as its Operational Readiness Review on Tuesday, March 7, 2017! The review board, consisting of representatives from DLR, Airbus, Tesat and Thales, confirmed the success of the reviews, provided that the actions for launch and operation preparation are completed and documented as planned before the satellite is shipped, and therefore also before its launch. 23) 24)

• February 2017: The Flying Laptop minisatellite is complete and tested. Delivery to the launch site should occur in April (Ref. 30). 25)
• As of the summer of 2015, the flight software of the Flying Laptop is being finalized and the last functional system tests will be prepared and executed. Thus, by the end of 2015 the satellite will be completed.
• Since mid-2014, the fully integrated small satellite Flying Laptop is in the system testing phase at the Institute of Space Systems located at the University of Stuttgart in Germany.
Launch
The Flying Laptop satellite was launched on July 14, 2017 (06:36:49 UTC, 09:36:49 Moscow time) as a secondary payload on a Soyuz -2.1a Fregat-M vehicle configuration from Baikonur, Kazakhstan. The primary payload on this flight was the Kanopus-V-IK (IK =Infra-Krasny, means "infrared" in Russian) mission of Roscosmos. 26) 27) 28) 29) 30)
Orbit: A sun-synchronous polar circular orbit with an altitude of 600 km, inclination = 97.6º.
Secondary Payloads
In total, 72 secondary satellites will be launched on the Kanopus-V-IK mission, including spacecraft for four separate commercial remote sensing and weather constellations.
Glavkosmos, a subsidiary of Russian state space corporation Roscosmos, is seeking to become a larger provider of rideshare launch services for small satellites. In addition to this upcoming launch, Glavkosmos is planning to fly about 40 more small satellites on two Soyuz missions from the new Vostochny Cosmodrome in Russia's Far East region late this year, with additional launch opportunities planned for 2018 and beyond.
In addition, the German Orbital Systems company of Berlin, ECM Space Technologies GmbH, actively participates in the launch, by supplying a DCSM (Deployment Control and Separation Sequence Management) unit. Integration of two secondary satellites built in Germany, three from Russia and 12 from the USA. GlavKosmos subcontracted this task to ECM. 31)
• Forty-eight (48) Dove satellites (Flock 2k) of Planet will be launched into an SSO of 475 km altitude. 32) Planet of San Francisco is the biggest single customer for the upcoming launch. This "flock" of 48 satellites will go into a sun-synchronous orbit, but one slightly different from those of 88 similar satellites launched on an Indian Polar Satellite Launch Vehicle in February. Those satellites went into a sun-synchronous orbit that crosses the equator at 9:30 hours local time. The new satellites will launch into an orbit that crosses the equator at about 11:00 hours local time.
• Spire Global of San Francisco, which is deploying a fleet of CubeSats to collect GPS radio occultation and ship tracking data, has eight (8) of its Lemur CubeSats on this launch.
• GeoOptics of Pasadena, CA, is flying its three CICERO 6U CubeSats (CICERO-1, -2,- 3), designed to collect GPS radio occultation data to support weather forecasting.
• Flying Laptop, a minisatellite (120 kg) of IRS (Institute of Space Systems), University of Stuttgart, Germany.
• WNISAT- 1R (Weather News Inc. Satellite 1R), a microsatellite (43 kg) for north arctic routes and atmosphere monitoring. The project is started from the commercial objects between Weathernews and Axelspace, Japan. The object of the WNISAT-1R mission is monitoring of the Northern sea routes and of the CO2 content of the atmosphere. 33)
• NorSat-1 and NorSat-2 of the Norwegian Space Center, built by UTIAS/SFL (Canada) on GNB (Generic Nanosatellite Bus), each with a mass of 15 kg. The NORSAT-2 satellite will carry a next generation Automatic Identification System (AIS) receiver from Kongsberg Seatex, along with a VDE (VHF Data Exchange) payload that will enable two-way communication at higher data rates than possible with AIS. NorSat-1 (< 30 kg) carries three instruments: An AIS receiver, a Langmuir Probe Instrument, and CLARA (Compact Lightweight Absolute Radiometer), intended to observe total solar irradiation and variations over time.
• TechnoSat is a nanosatellite project (18 kg) of the Technical University of Berlin. Test of new nanosatellite components, including a camera, a new reaction wheel system, a star tracker, a transmitter, a fluid dynamic actuator, and commercial laser retro-reflectors.
• Corvus-BC 1 and Corvus-BC 2: Astro Digital, formerly known as Aquila Space, (formed from the core team of the former Dauria Space daughter Canopus Systems) developed the Corvus-BC Earth observation CubeSats (6U, 10 kg). The Landmapper-BC spacecraft, also known as Corvus-BC1 and Corvus-BC2, have color and infrared cameras for wide-area imaging.
• MKA-N 1, 2: Two Earth observation CubeSats (6U, 10 kg each) of Roskosmos, built by Dauria Aerospace.
• NanoACE, a technology demonstrator by Tyvak Nanosatellite Systems, Inc. (Irvine, CA) to validate the Endeavor suite technologies that will be used for future missions and is solely for the purpose of internal Tyvak development as an attitude control experiment. A 3U CubeSat (5.2 kg).
• Mayak: A Russian 3U CubeSat (4kg) developed by a group of young scientists named "Your sector of space" with support of the Moscow State University of Mechanical Engineering (MSUME). In orbit, the 3U CubeSat will deploy four triangular reflectors, 4 m2 each, which form a tetrahedral shape. The reflectors are made from metalized membrane with reflection coefficient of 95%. The reflector will provide a -10 optical magnitude at the beginning of the flight to allow for easy tracking. Mayak will be put into a tumbling motion over all axes, with at least 1 revolution per second.
• Iskra-MAI-85, a CubeSat of the Moscow Aviation Institute. 34)
• Ecuador-UTE-YuZGU, a CubeSat of the Kursk South-Western State University, Russia.
Kanopus-V-IK Timeline
09:36:49 – launch vehicle lift-off;
09:38:46 – 1st stage separation;
09:41:36 – 2nd stage separation;
09:41:38 – fairing jettison;
09:45:37 – head module separation;
09:45:42 – 09:52:18 – Fregat upper stage flight to a transfer orbit;
10:35:01 – 10:36:27 – Fregat upper stage flight to the Kanopus-V-IK separation orbit;
10:38:07 – Kanopus-V-IK separation (orbit i=97.44°; H = 522.5km; h = 478.6km);
11:13:29 – 11:14:35 – Fregat upper stage flight to the second transfer orbit;
11:58:29 – 11:59:35 – Fregat upper stage flight to the separation orbit of a group of smallsats;
12:01:43 – 12:05:03 – Phase 1. Separation of 5 smallsats (orbits i=97.61°; H = 601.5-600.1km; h = 600.0-590.1km);
12:10:03 – 12:26:43 – Phase 2. Separation of 19 smallsats (orbits i=97.62-97.61°; H = 601.0-606.9km; h = 580.1-587.4km);
12:51:49 – 12:53:15 – Fregat upper stage flight to the third transfer orbit;
13:34:39 – 13:35:51 – Fregat upper stage flight to the separation orbit of a group of smallsats;
17:18:23 – 17:41:17 – Separation of 48 smallsats (orbits i=97.00-97.01°; H = 485.0-477.4km; h = 482.2-450.5km);
17:51:49 – 17:53:45 – Fregat upper stage flight to reentry orbit;
~18:18:49 – Fregat upper stage reentry (altitude – 100 km), sinking in the Indian Ocean.
Mission Status
• March 25, 2021: The DLR laser terminal aboard the Flying Laptop minisatellite (120 kg) of the University of Stuttgart establishes contact with the NICT (National Institute of Information and Communications Technology) ground station of Japan. 35) 36)
a) For the first time, a signal from DLR's OSIRISv1 terminal was received at an NICT ground station in Japan.
b) OSIRISv1 was developed by the DLR Institute of Communications and Navigation and launched on board the 'Flying Laptop' satellite in 2017 in cooperation with the Institute of Space Systems at the University of Stuttgart.
c) Through optical communication systems that use laser beams for data transmission, a significant increase in data rates between satellites and ground stations is possible.
- The resolution of cameras and other sensors on Earth observation satellites is continuously increasing. This leads to vast amounts of data, which are still being transmitted to Earth using radio systems. The data link between the satellite and Earth limits the capability of these systems. A significant increase in data rates is possible with optical communication systems that use lasers to transmit data. Numerous images can be transmitted with high resolution. As part of an international cooperation, researchers from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and the Japanese NICT, supported by the University of Stuttgart, have started channel measurements for the transmission of data by laser in Japan. Recently, a first data link from space was received from the optical terminal 'OSIRISv1' at an optical ground station in Tokyo.
- "Satellite-based laser communication heralds a new era in satellite communications," says Christian Fuchs from the DLR Institute of Communications and Navigation. Fuchs oversees the Institute's work in the field of optical communications. Next-generation systems already enable data rates of up to 10 Gbit/s. They are also smaller, lighter and require less electrical power than comparable radio systems. Since laser beams do not penetrate clouds, worldwide networks of optical ground stations are necessary to achieve the desired availability. OSIRISv1 (Optical Space Infrared Downlink System) was developed by DLR in cooperation with the Institute of Space Systems at the University of Stuttgart. It was successfully launched into space on the 'Flying Laptop' satellite in 2017.
Joint Test with Researchers in Japan
- During the joint test, the first measurement data, such as the received signal power, were recorded. This makes it possible to evaluate the characteristics of the atmospheric transmission path. On the one hand this can be used to optimize the design of future systems and on the other hand to plan networks. At the wavelength of 1550 nm, which is specified in the standards, there is very little measurement data available to date.
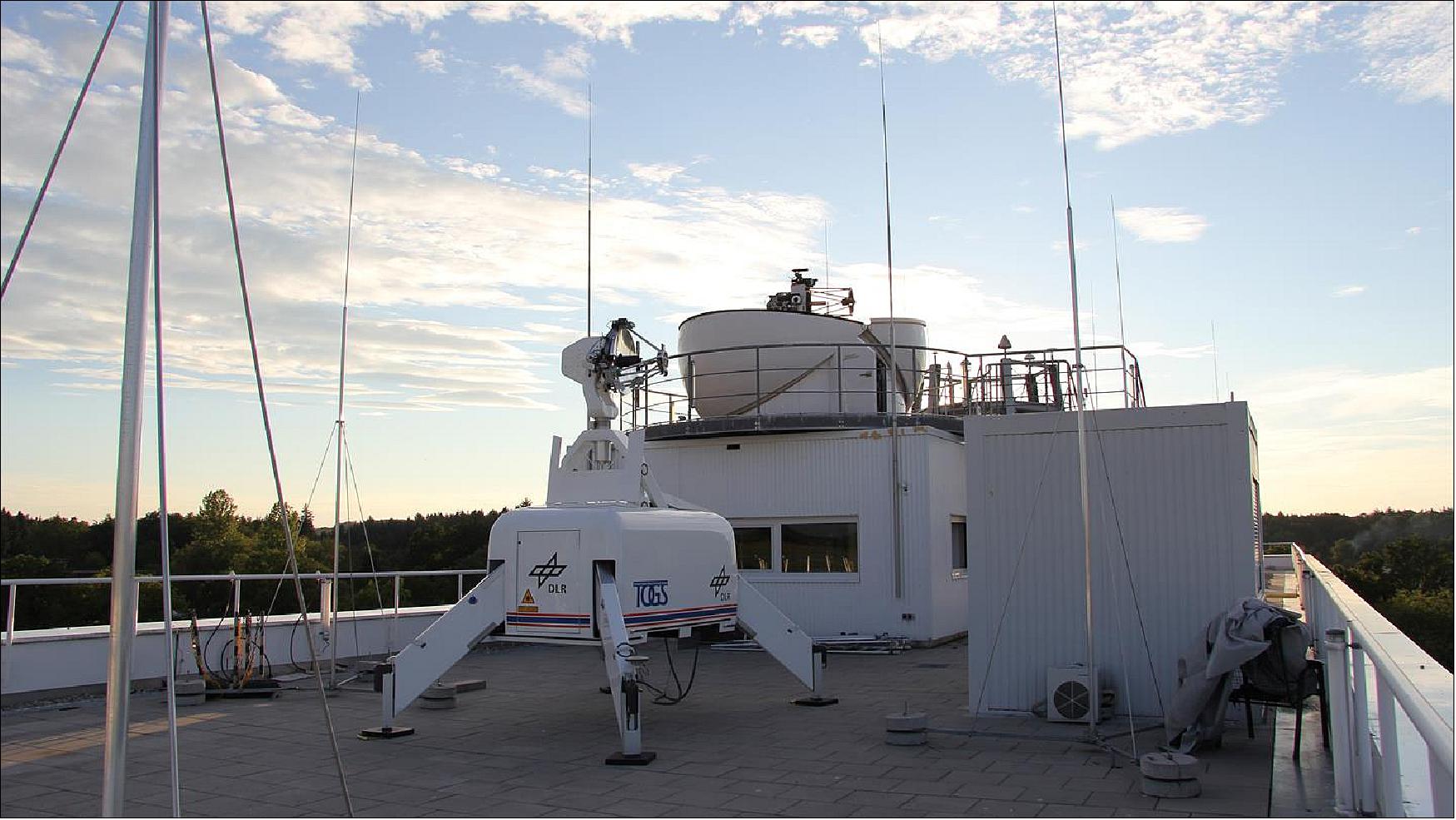
- The precise beam alignment, which is made possible by the attitude control system of the Flying Laptop satellite is also worthy of note. OSIRISv1 itself has no mechanical elements for beam steering. Therefore, the satellite's attitude control system must perform this alignment. The University of Stuttgart has successfully optimized the attitude control performance in joint tests with DLR at its ground station in Oberpfaffenhofen.
- The measurement data obtained is now being evaluated by the teams and will be the basis for further tests in the near future – both for the NICT ground station and other partner facilities worldwide. The current measurements in Japan add to a long history of joint tests that have so far taken place using Japanese satellites and the Oberpfaffenhofen ground station. Trials with the JAXA ( Japan Aerospace Exploration Agency) OICETS (Optical Interorbit Communications Engineering Test Satellite) / Kirari satellite took place in 2006 and 2009 and trials with the NICT SOTA (Small Optical TrAnsponder) payload were conducted in 2013.
- Further international tests with DLR payloads will take place soon. On 24 January 2021, the world's smallest laser terminal, OSIRIS-CubeL, which DLR developed in cooperation with Tesat-Spacecom, was launched on board the PIXL-1 satellite. As early as next year, OSIRISv3 is to be installed on the Airbus Defence and Space Bartolomeo platform on board the International Space Station (ISS).
• August 2019: Precise attitude control is a key factor of many payloads with high ground resolutions, small fields of view or narrow beams such as an optical data downlink. The satellite is three-axis stabilized with reaction wheels as main actuators. Flying Laptop is equipped with the OSIRIS optical data downlink which was built by the German Aerospace Center (DLR). As this instrument is body mounted on an optical bench, the attitude determination and control system(ACS) is required to point the whole satellite in the direction of the ground station with a high pointing accuracy of150 arcseconds. At the time of launch the ACS did not reach this precision. 37)
- The addition of a Kalman filter resulted in a significant lower noise level on fused sensor data. Moreover, other smaller inaccuracies in the navigation were fixed and onboard parameters were determined. A tool chain to analyze the satellite data was developed and used to determine the Flying Laptop's geometrical parameters.
- As a result, the satellite fulfills the pointing requirement of <150 arcsecond deviation from the target attitude for a sufficient period of time during a pass over the target. Successful links with the optical data downlink were demonstrated with the DLR ground station in Oberpfaffenhofen.
• May/June 2019: The status of the Flying Laptop is robust after completing nearly 2 years on orbit. The satellite platform provides a dependable, high pointing accuracy, which is often required by a variety of payloads or communication components. The power subsystem of the Flying Laptop allows for a continuous operation even of combined payloads, still minimizing the wear on the power subsystems and thus allowing long-term missions. Furthermore, the overall availability of the satellite system is outstanding, on the one hand due to the high reliability and robustness of the satellite bus with its redundancy and FDIR scheme as well as its carefully developed and tested flight software, and on the other hand due to its operations approach. 38)
- Flying Laptop is operated entirely by a student team using the university's ground station and mission control infrastructure. The satellite's payload includes a receiver for ship tracking, a multispectral camera system and a wide-angle camera. Two payload downlink systems are integrated, a conventional downlink system in the ham-radio S-band with 10 Mbit/s data rate and the optical communication system OSIRIS, provided by the German Aerospace Center (DLR), transmitting at a data rate of up to 200 Mbit/s. Despite the increased level of complexity due to the chosen approach, the project is embedded in the university environment and fully serves educational purposes.
- The satellite is approaching its two-year design lifetime, however still all bus components are performing exceptionally with-out any sign of degradation. Due to its single point of failure tolerant design all bus components are available in a hot or cold redundant configuration. The redundant radiation hardened on-board computer (OBC) includes Error Detection and Correction (EDAC) mechanisms to correct radiation induced single event upsets.
- Pointing capabilities: The satellite bus features a three-axis stabilized attitude control system (ACS) with two star trackers (STR), four fiber optical gyros (FOGs) and as main actuators four reaction wheels (RWs). Four pointing modes are implemented, nadir, inertial, target and sun pointing. For basic attitude control and for the desaturation of the reaction wheels magnetorquer, magnetometers and sun sensors are used. Overall a pointing knowledge of 7 arcseconds and a pointing accuracy of <150 arcseconds is achieved. Position data is collected using three GPS receivers. The three GPS receivers on board the Flying Laptop have already been used to perform attitude determination of the satellite.
- Power supply: The solar panels can provide a maximum of up to 270 W of electrical power, the satellite bus consumes in its Idle mode around 40 W of power, for continuous payload operations up to 100 W are available depending on the satellites orientation.
- Ground station network: The commercial S-band frequency is used for communication with the satellite. This provides good compatibility with professional ground stations, even though the satellite is nominally operated via the institute's own ground station. The compatibility enables to build up a network of ground stations as being used during the LEOP, leading also to high reliability for the operation of the satellite and a high number of usable passes. All ground infrastructure is in secured network with a connection to DLR via Space Link Extension (SLE). In any case, the operation is fully conducted from the control center at the University of Stuttgart and is highly automated.
- Mission planning system: A payload mission planning system was implemented providing an easy to use interface. The handling of payload request is entirely automated and thus means no extra work for the operations team, this allows to carry out a large variety of individual payload data takes. 39)
• April 3, 2019: First laser transmission tests were carried out with the OSIRIS (Optical Space Infrared Downlink System) instrument on the Flying Laptop mission of the University of Stuttgart and the DLR optical ground station in Oberpfaffenhofen. 40)
- The OSIRIS laser terminal: OSIRIS is extremely compact, with a mass of only 1.3 kg, and is very power efficient. Successful transmission tests have now been carried out using DLR's optical ground station in Oberpfaffenhofen as part of a program of experiments that has been ongoing since the summer of 2018. These results were confirmed during a measurement campaign conducted in March 2019, when the laser beam from the Flying Laptop was received on the ground. The high-precision alignment of the satellite and ground station with one another represents a particular challenge, and has now been demonstrated for the first time.
- "The transmission of satellite data by laser is the future," says Florian David, Deputy Director of the DLR Institute of Communications and Navigation. "The power of optical communications will make it possible to, for example, make far larger amounts of data available to rescue workers on the ground during disaster recovery operations. For this reason, optical communications is a key area of our research." As part of the OSIRIS program, the DLR Institute of Communications and Navigation in Oberpfaffenhofen is developing optical communications systems that are particularly suited to direct downlink from small satellites.
- The University of Stuttgart's ‘Flying Laptop' small satellite is testing new technologies and assisting with scientific Earth observation. In addition to numerous experiments, the satellite is also equipped with a high-resolution camera. The satellite, which was developed and built by students and doctoral candidates as part of the Small Satellite Program at the Institute of Space Systems, was launched from Baikonur in 2017. The operation of the satellite and the scientific evaluation of the data are funded by a grant from the Baden-Württemberg Ministry of Science, Research and the Arts.
- "Although laser data transmission offers huge advantages in terms of achievable data rates, it also poses a tremendous challenge when it comes to accurately aligning the satellite with the ground station. The successful OSIRIS transmission tests demonstrate the high precision of the attitude control system and our satellite's outstanding performance," says Sabine Klinkner, OSIRIS Project Leader at the University of Stuttgart.
- Following the success of the transmission tests, the research teams in Stuttgart and Oberpfaffenhofen are keen to carry out more experiments with OSIRIS on the Flying Laptop. These include the reception of mission data and the characterization of the transmission channel. This should make a vital contribution towards international standardization of the technology and enable the development of even more robust transmission processes for future missions. The experiments will continue in Oberpfaffenhofen from spring 2019.
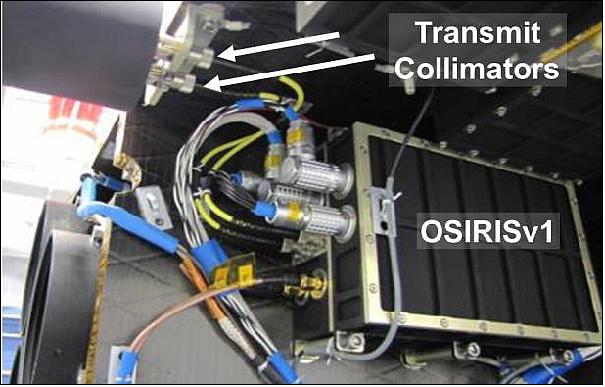
OSIRIS (Optical Space Infrared Downlink System) communication experiment:
Flying Laptop is is the first mission of University of Stuttgart's small satellite program to demonstrate new optical communication technologies in space. For high data rate transmission of the mission data to ground, FLP is equipped with the first generation of OSIRIS terminals (Figure 20). The payload consists of a power supply unit as well as a laser unit with two independent laser sources. In this configuration, the payload consumes 26 W and adds 1.3 kg to the satellite mass while transmitting data with up to 1 W of optical output power, at a data rate of up to 200 Mbit/s. The transmission laser divergence is therefore adapted to the pointing accuracy of the satellite, using the body pointing with the star cameras as reference. Therefore, no beacon laser is required to operate OSIRISv1. 41)

Parameter | Value | Comment |
Beam divergence | 1.2 mrad | FWHM, both collimators |
Laser Source 1 | High Power Laser Diode (HPLD) |
|
Laser Source 2 | Erbium Dopen Fiber Amplifier (EDFA) |
|
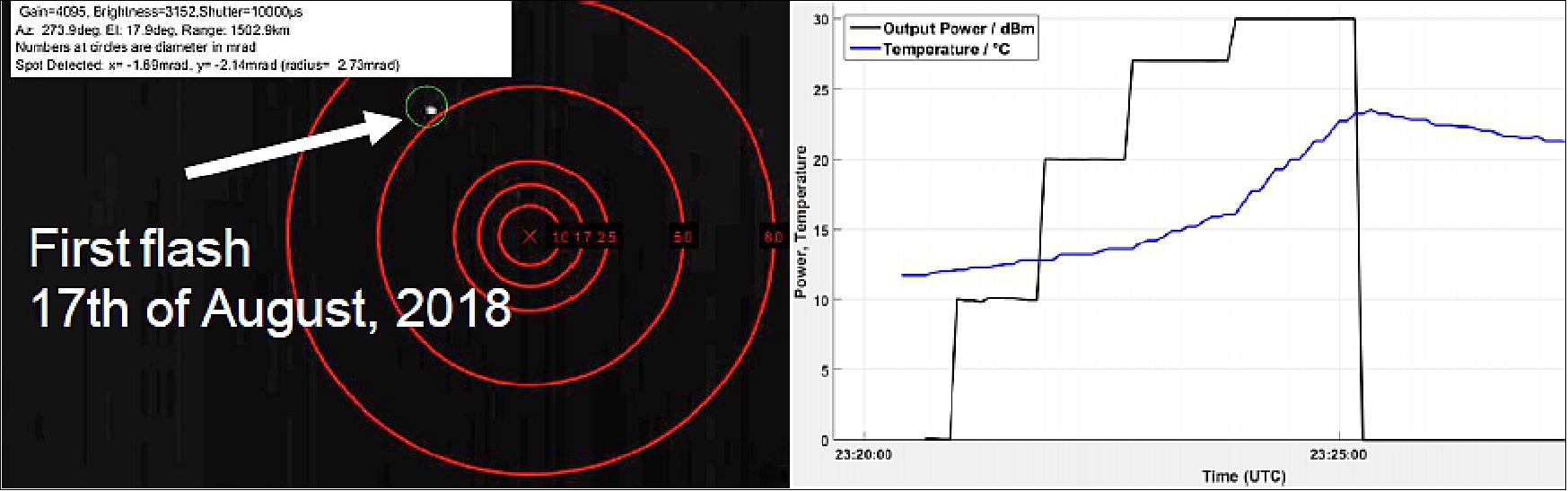
Successful downlinks with OSIRISv1 could be demonstrated in late summer and fall of 2018. After a calibration campaign with the first reception of light on 17 August and a subsequent optimization of the offset between OSIRISv1 and Flying Laptop, a stable conduction of experiments is possible and ongoing. Figure 22 shows the first received flash as seen on the tracking camera of Optical Ground Station Oberpfaffenhofen, as well as exemplary telemetry data of the EDFA (Erbium Dopen Fiber Amplifier) operated in orbit. All systems onboard the satellite behave as expected.
Identification of the collimator orientation: The exact knowledge of the collimator orientation is mandatory because FLP uses an open-loop approach for the pointing of OSIRIS. The collimator is mounted on the payload optical bench of the FLP. The Panoramic Camera (PamCam) is mounted on the same bench in close proximity. PamCam images can therefore be used to determine the orientation of the collimator. Images in the integration room with active laser diodes and detector cards were taken with the PamCam before launch. Since the camera was used outside it's nominal focal parameters in the small integration room the test images were slightly blurred resulting in an estimated deviation between the boresight of the PamCam and the OSIRIS EDFA of -0.27° to -0.25° in horizontal and 0.40° to 0.48° in vertical direction.
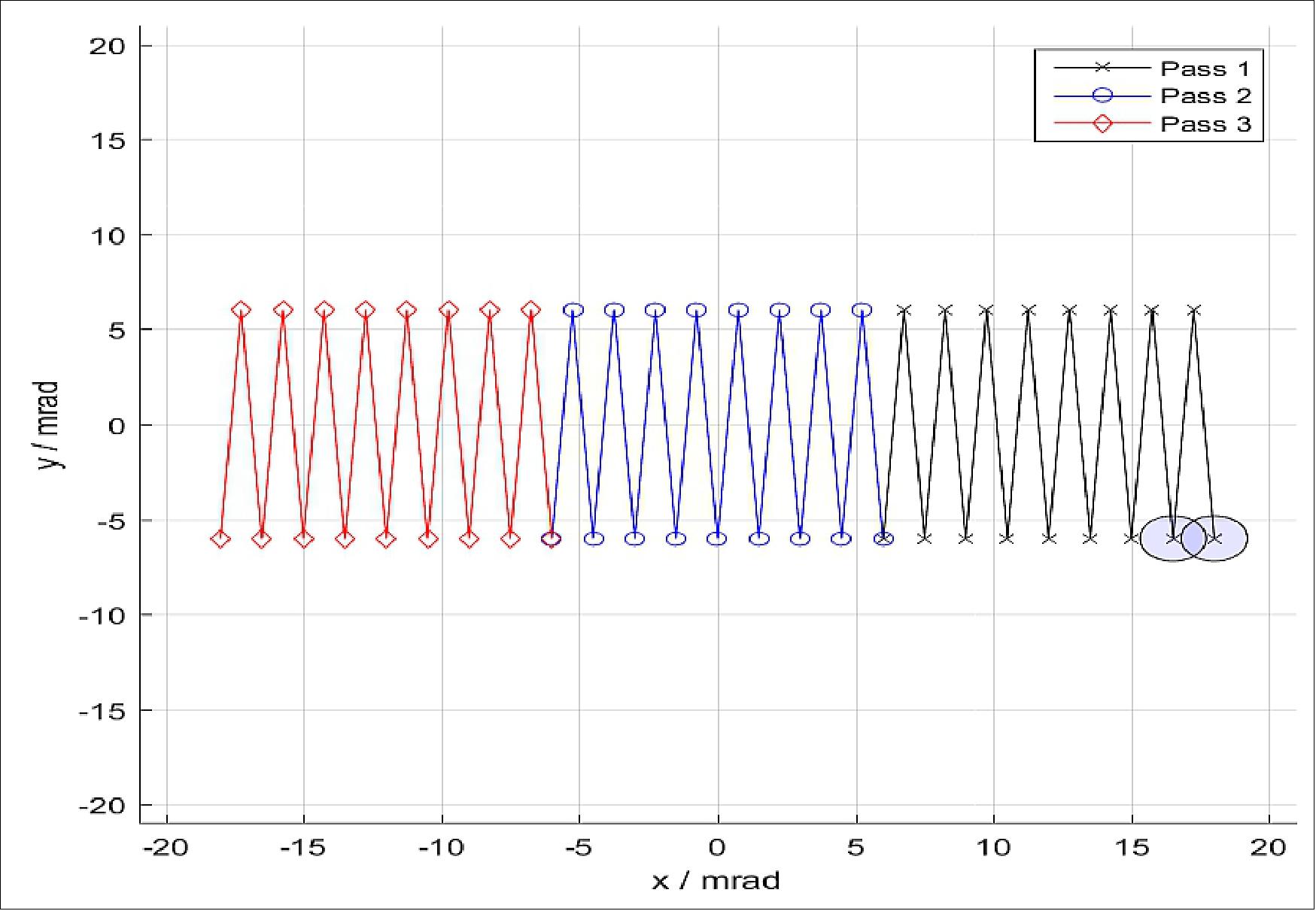
After successful commissioning of the satellite bus, the payloads were taken into operation and the deviation of the PamCam boresight from the satellite's z-axis could be determined. Combined with the deviation of the OSIRIS lasers to the PamCam, the collimator orientation w.r.t. to the satellites body coordinate system could be calculated. The PamCam orientation was obtained by taking nadir images and a comparison with the location of the satellites subpoint as well as the boresight location on ground. Due to the low spatial resolution of the PamCam and other uncertainties in the collimator orientation, e.g. mechanical stress during launch and thermal effects in orbit, a comparably large uncertainty area of 36 x 36 mrad around the theoretical collimator orientation was assumed. A meander pointing pattern as shown in Figure 24 was used to examine this area. The pattern was achieved by commanding corresponding angle offsets of the pointing axis to the optical ground station while the satellite performed a target pointing maneuver. During target pointing rotational rates of up to 1.8°/s with the satellite are necessary to maintain its orientation to the ground station. Therefore, additional slews for the pattern were limited to 0.03°/s to maintain a stable pointing. This limited the area that could be covered during a pass with a typical duration of 8.5 minutes. Hence, it was decided to divide the area into 9 sectors with 17 individual points each. Figure 24 shows exemplary patterns for three passes.
• October 2018: Mission Results: With the payload request handling package, the project was able to drastically increase the number of observations made. More than 300 observations have successfully been executed within the last 4 months with more than 12,000 images received (Ref. 45).
- Figure 25 and Figure 26 are showing images from the PamCam and MICS, respectively. The PamCam image is part of a continuous data take with more than 200 stitched images.
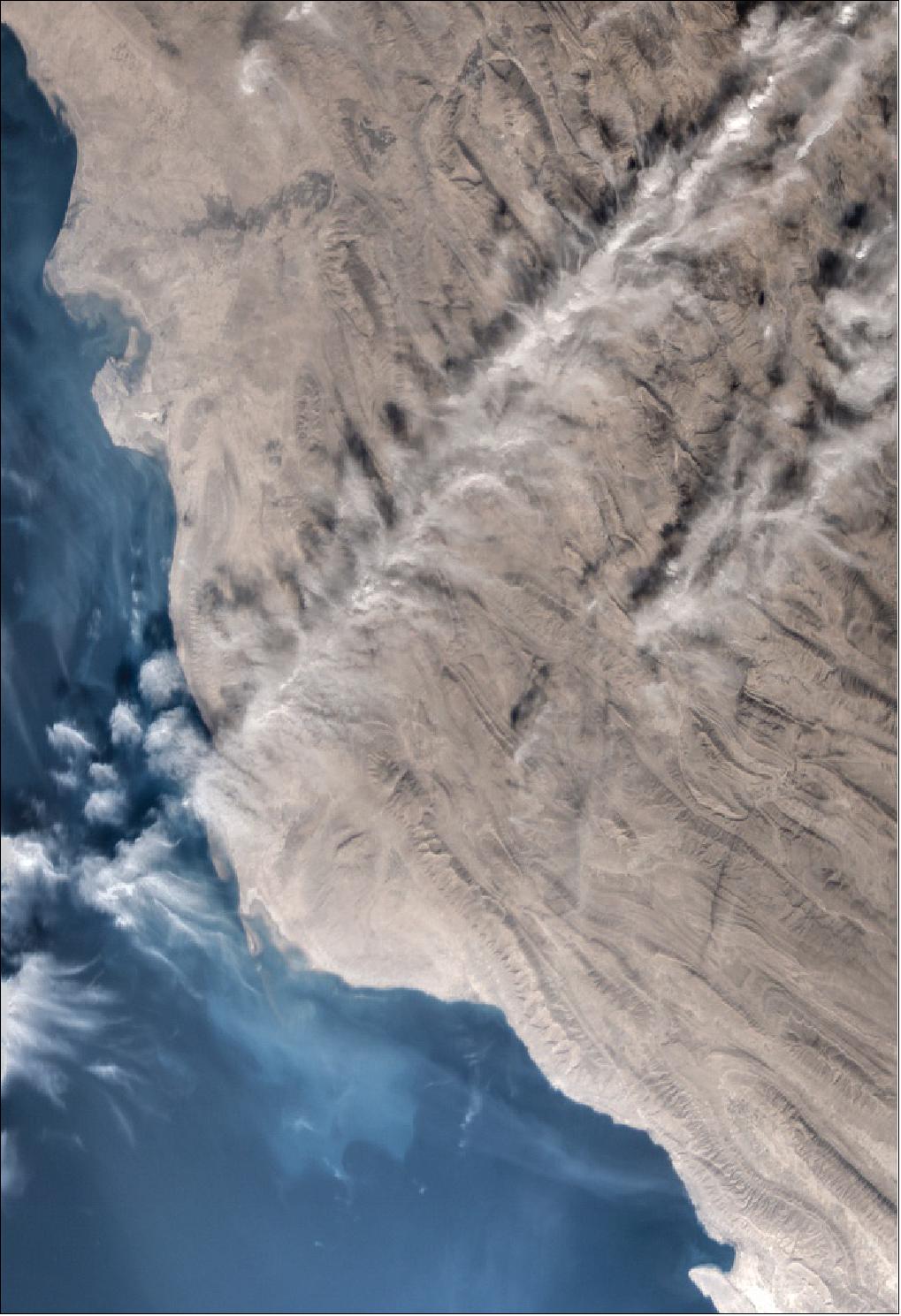

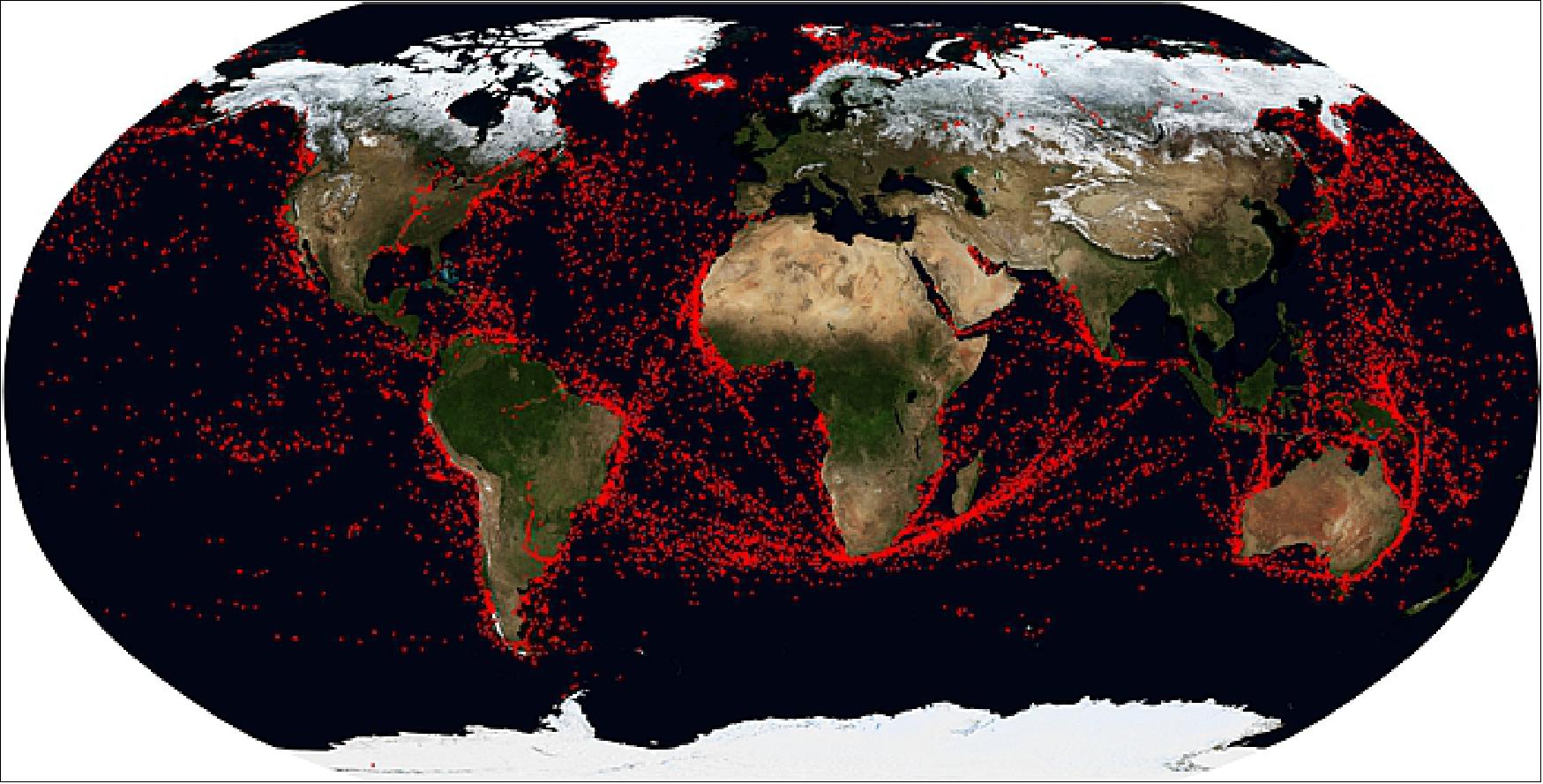
Figure 27 shows all recorded AIS messages during a 24 h data take in nadir mode, regarding its power budget the Flying Laptop would be able to perform constant payload operations in nadir mode. 48 h continuous AIS data takes were also conducted.
• September 2018: The small satellite Flying Laptop, launched in July 2017, was developed and built by PhD, graduate and undergraduate students at the Institute of Space Systems (IRS) of the University of Stuttgart with assistance by industry and research institutions. The project goals include technology demonstration, earth observation and improving the education of students at the University of Stuttgart in the fields of satellite development, integration, test, and operations. 42)
• Nominal Satellite Operations: During the nominal satellite operations phase more and more requests for payload data takes and experiments slots were received. The available software tools to handle these requests required significant manual work and appeared to be not practical for nominal satellite operations. Parts of the operations team and the on-board software development team share the same personal, however their expertise was needed for necessary onboard software updates addressing the bespoken bugs, as well as to optimize the on-board store handling and to improve the pointing performance. Staffing and pass execution was therefore reduced drastically. Only one uplink pass on each working day is used with a single person attending this pass in the control room sending a pre-defined command stack and monitoring live TM (Ref. 45).
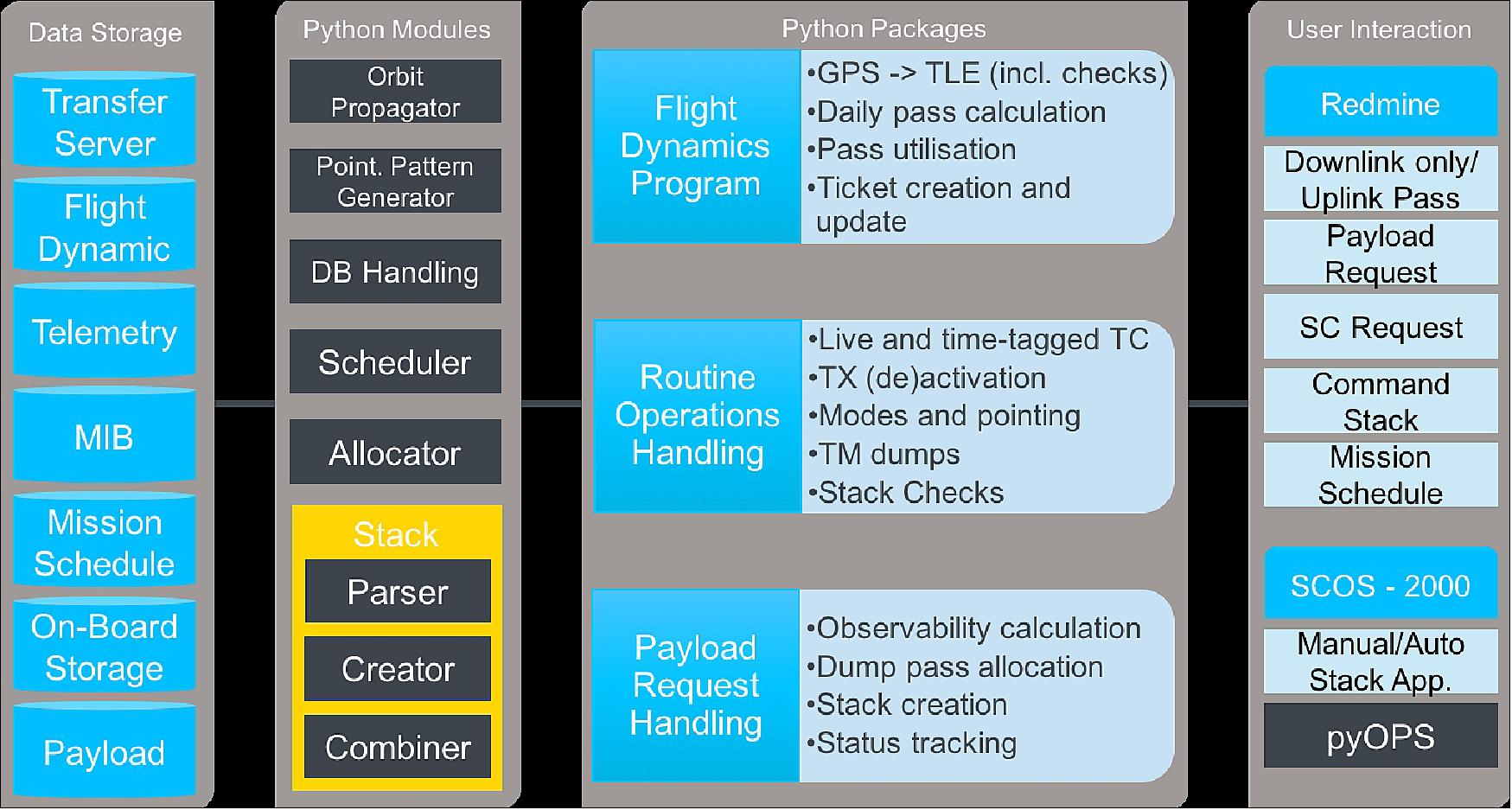
- To reduce the amount of manual work for the command controller and mission planner ground-based automation tools were developed. The aim of this development was to automate the generation of command stacks and to provide them for each uplink pass without human interaction. All of these tools are written in Python and are interacting with Redmine via its REST API. An overview of the ground-based automation tools is shown in Figure 28, they are divided into modules accessing the different data sources.
• July 2018: The Flying Laptop has been in orbit for one year. After all the systems were commissioned during the first week after the project launch, the Flying Laptop began regular operations. Project manager Sabine Klinkner, Professor for Satellite Technology at the IRS sums up: "All components were successfully commissioned, the satellite system was stable from the beginning and is undergoing continuous optimization. The project, carried out by doctoral students and students at our institute, is a great success for research and teaching in the field of Stuttgart's space flight research." The communication via the university's ground station is functioning flawlessly with over 2200 ground contacts. 43)
• June 2018: Object-oriented programming is widely used in the software development branch but is not as popular for flight software of spacecraft. Flying Laptop uses a component-based object-oriented software and is compatible with ECSS-PUS (European Cooperation for Space Standards-Packet Utilization Standard). 44)
- The first half year of operations showed that an object oriented flight software is able to provide a reliable platform for a small satellite. From an operator's perspective the mode management and the FDIR concepts show that hiding complexity in encapsulated components can simplify daily work without hiding important information.
- Nominal operation is simplified due to the automatisms implemented building on the FSFW(Flight Software Framework) component model. As a result, operations can be performed with a crew of usually 2 operators during weekdays and no operator during weekends with experiments and other tasks running 24/7. Telemetry checks can be performed quickly as failure types and the device specific attribution is clearly visible to the operator.
- Further development is ongoing at the University of Stuttgart. For the mode management, another decrease in needed commands will be established with adding the activation of mode specific housekeeping telemetry into the components. Also, further missions with the FSFW are planed, which will benefit from the in-flight experience with Flying Laptop.
• Commissioning: During commissioning all payload devices were taken into operation and further redundant bus components were checked, including a switch to the redundant transmitter and OBC. The first image taken by the PamCam (Panoramic Camera) was received 5 days after launch. The commissioning phase was executed successfully as all payloads were working fine and returning data. All passes were executed in target pointing mode for stable TM/TC and DDS links. The duration of the day and night shifts were reduced by using only passes over Germany with an operations team consisting of four positions. The amount of activities for the mission planner increased as more and more time-tagged operations were planned. Another bug in the on-board software was found during the commissioning, a full housekeeping store did not allow for simultaneous read and write operations (Ref. 45).
• The first successful contact with the satellite was at 9:48:32 UTC on 14 July 2017 with the WHM (Weilheim) ground station. A total of 60 passes within 4 days followed and were mostly executed successfully, with some minor ground related issues. Operations were performed 20 hours a day in two shifts with 9 positions each. The operations team consists of a Flight Director (FD), a Command Controller (CC), four Spacecraft Controllers (SC), a Ground Controller (GC), a Antenna Controller (AC) and a Mission Planner (MP). 45)
- Solar panels were deployed on the second day and check outs of several functions, the higher ACS devices and modes and some redundancies were performed. A bug in the on-board software was discovered that prevented the usage of both star trackers at the same time. Thus, initially only one star tracker was used. All remaining subsystems worked as expected and LEOP (Launch and Early Operations Phase) was finished ahead of schedule. Battery state of charge remained above 95% throughout the LEOP, communication links were stable and temperatures remained between 5° and 20°C, the OBC (On-Board Computer) did not reboot. All ACS modes worked with pointing accuracies below 1°, which could be improved significantly throughout the following phase.
Sensor Complement
The scientific payload of the satellite is a triple imaging system, a VNIR (Visible Near-Infrared) system called MICS, the PamCam, and AIS Receiver, as well as the star tracker of the Attitude Control System of the Flying Laptop.
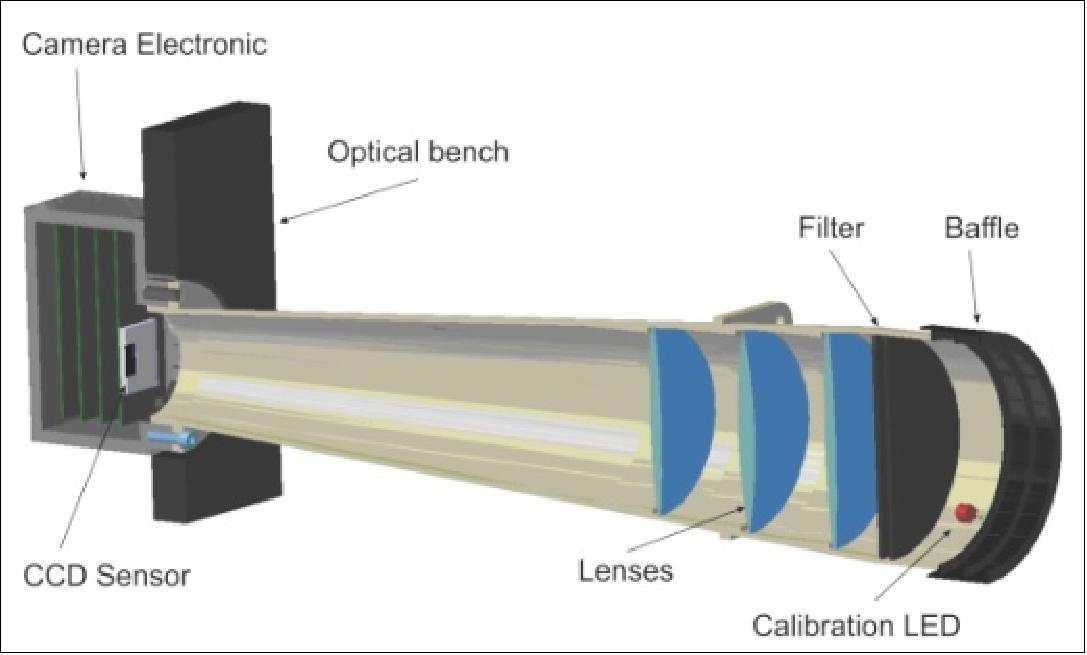
MICS (Multispectral Imaging Camera System)
The objective is to observe in the VNIR range of the spectrum in three bands at medium resolution (GSD of 20 m). MICS consists of three single cameras, each with an area array CCD detector for snapshot observations.
Spectral bands | 530 nm - 580 nm (green) |
GSD (Ground Sample Distance) | 20 m |
Swath width | 20 km |
Data quantization | 12 bit |
Instrument mass, power ,size | ~4 kg, ~5 W, 100 mm x 90 mm x 400 mm |
The optical system uses a double Gauss telescope with interference filters placed in front of the system. The use of an area array detector has advantages for multi-angular measurements. The multi-angular measurements will be done in the target-pointing mode, where the satellite is focused on the target site during the whole passage.
In order to accomplish reliable scientific measurements, periodic calibration of the instrument is mandatory, not only on ground, but also in space. A particular LED (Light Emitting Diode) device is being used to verify the following items:
• Pixel-to-pixel shift (flat-field calibration)
• Spectral shift of interference filters
• Radiometric performance.
Pointing modes for image acquisition
Three attitude control modes have been defined for image acquisition:
1) Inertial pointing mode: In this mode, the star sensor is being used to provide high accuracy pointing knowledge of 7.5 arcseconds. The satellite will be and will also remain inertially stabilized, i.e. the coordinate system of the satellite will maintain in the same orientation with respect to stars. Note: This mode is not useful for taking Earth imagery. Other observations (e.g. stars, moon) are possible.
2) Nadir pointing mode: In this mode the satellite is being aligned in the direction of the Earth, i.e. the z-vector of the satellite's coordinate system is perpendicular to the Earth's surface; hence, the angular rate remains constant. This mode is also called the "Earth-pointing mode," being used for image acquisition, attenuation measurements and trace gas detection.
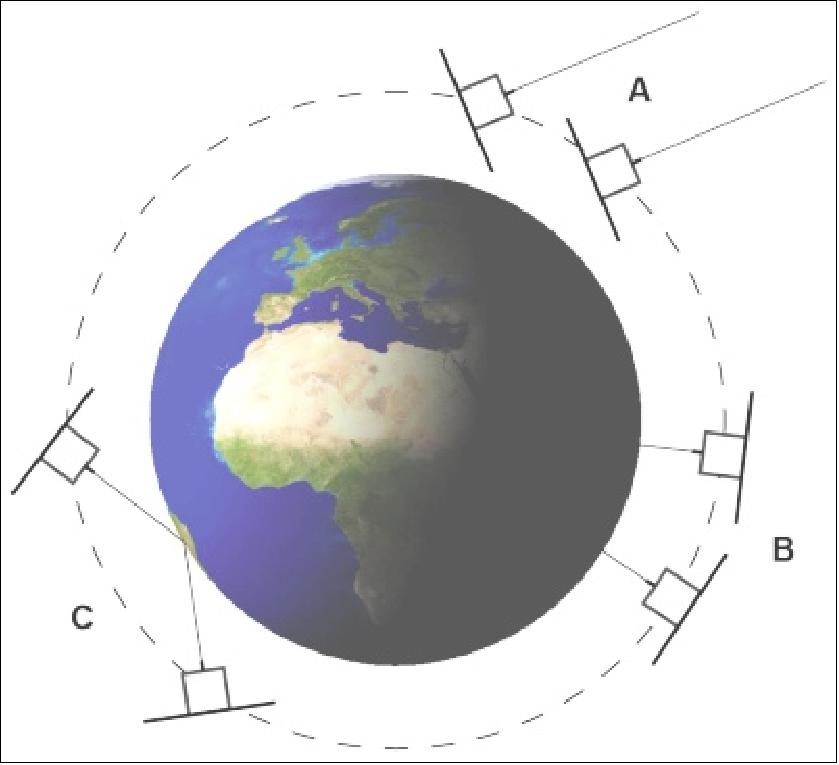
3) Target-pointing mode (or spotlight mode): This mode is being used to achieve the required coverage/resolution of the planned scientific observations. In this mode, the S/C points at fixed target (spot an Earth's surface) during an extended period of time thereby achieving a TDI (Time Delay Integration) effect. The spotlight service requires a slewing of the S/C to keep the instruments pointed. The maximum slew rate for this maneuver is 1º/s. This is the most demanding support mode of the satellite in terms of control algorithms.
Research experiments and technology demonstrations
• FPGAs: The introduction and reliance of onboard computing with an FPGA system represents a new approach to conventional system architectures. It provides the capability to directly generate the logical configuration of FPGA gates from a C-like high level language without producing the machine code for a processor (hence, massive parallel processing is possible). Using an onboard computer architecture with several reciprocative checking FPGAs, a safe system is obtained that even exceeds the performance of current PCs through its ability of parallel real-time processing. An inherent advantage of FPGA architectures is the capability of reconfiguration within milliseconds.
To make the system fault-tolerant and to address radiation issues, a cold redundant computer system is used.
• NEO (Near Earth Object) detection. Aside from delivering attitude information, the star tracker in use possesses a built-in feature to automatically detect, identify and track any other faint luminous object, not being a star, as long as the object is brighter than the visual (or apparent) magnitude Mv 11.
The Technical University of Denmark (DTU) has proposed an interplanetary mission to search for Near Earth Asteroids (NEA), based on their star tracker, µASC. Observation time for these science experiments of the Flying Laptop will be made available to test and verify this concept, in the eclipse phase of the LEO orbit (for further information see reference 6).
• PamCam (Panoramic Camera) is an additional COTS camera on Flying Laptop to provide context color video imagery of Earth . PamCam is required because the narrow FOVs of the two science imagers (MICS and TICS) are insufficient for context information imagery to increase public outreach of the Small Satellite Program. PamCam uses CMOS technology with a pixel pitch of 6.7 µm. It has 1280 x 1024 pixels and can capture up to 27 images per second in full resolution. Using a focal length of approximately 25 mm, the sensor can cover a FOV of 20º x 16º. This results in a swath width of approximately 250 km and a ground sample distance of around 200 m from a 700 km orbit. The video link of PamCam employs a lossy video compression technique to be able to handle the large source data volume. 46)
AIS (Automatic Identification System)
In Q3 of 2012, an AIS receiver inclusive antenna was implemented as a new payload on Flying Laptop. This payload was developed, build and tested by the DLR Institute of Space System in Bremen. The objective of the AIS instrumentation is to receive AIS signals from ships in the ground segment. 47)
Since January 1, 2004, it is mandatory to run an AIS transmitter for all ships bigger than 300 GRT (Gross Register Tonnage) in international waters. Since July 1, 2008, all ships in national waters bigger than 500 GRT also need to run an AIS transmitter. AIS, is a system to supervise marine traffic. In times of increasing ship traffic, a system like this is indispensable. AIS shall be used or the following:
- preventing collisions
- information for adjoining coastal states considering ships and their cargo
- appliance for landward surveillance.
The system works as follows: Ships will send a message in regular time intervals. These messages contain, among other information the position, route, and velocity of the ship, the ship name and the call sign. If a ship has an AIS receiver on board, it can use the signals for better planning and decision making.
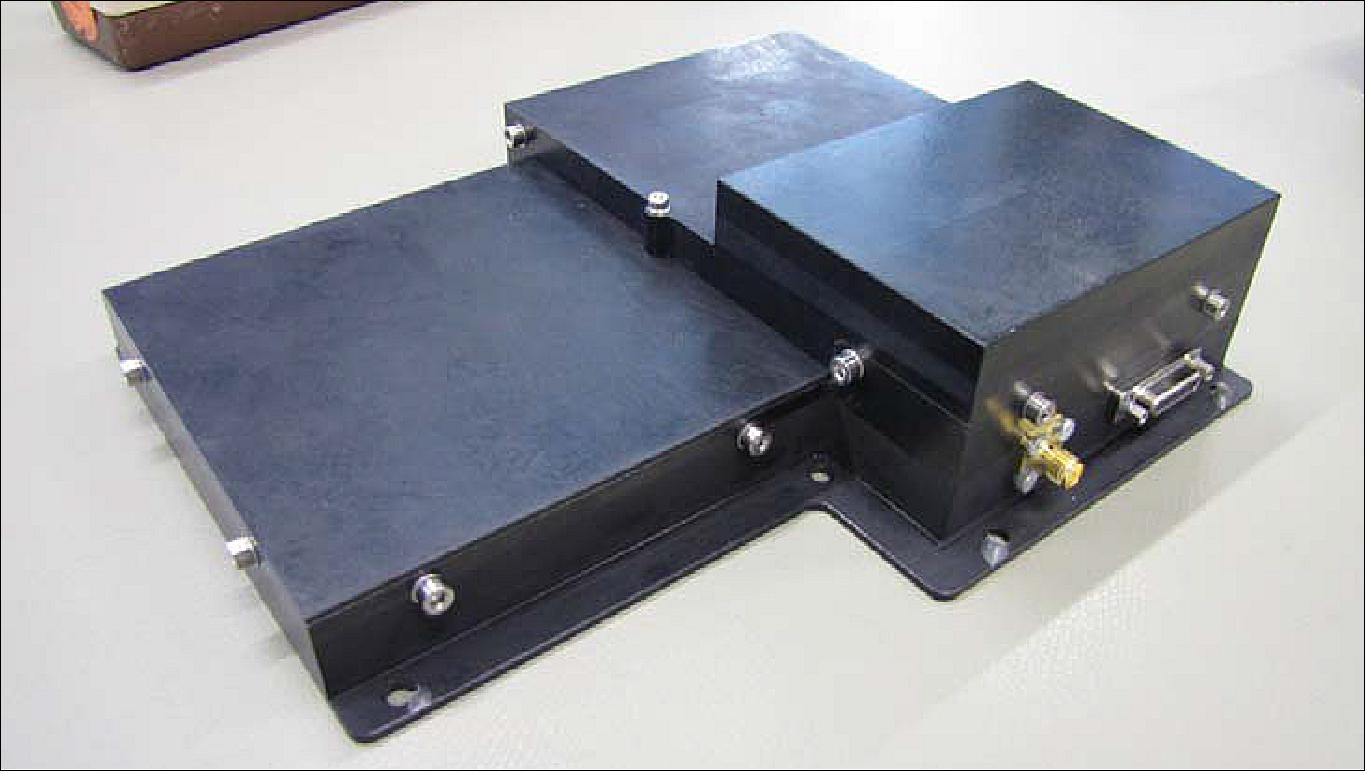
The AIS signals can also be received from a spacecraft. In a last-minute cooperation, between DLR and the IRS (Institute of Space Systems) of the University of Stuttgart, an AIS receiver incl. antenna could be accommodated within the satellite. According to the slogan, form follow function, the unusual form of the AIS receiver housing was created.
Ground Segment
To communicate with the Institute's own satellite, the IRS has its own ground station. The objective of the installation of the system is to automate operations as much as possible. Thus, the usage time of the satellite is to be maximized without providing an expensive and complex 24‐hour manual operation. The main tasks of this station are sending commands to the satellite (telecommanding, TC), the reception of Housekeeping data (telemetry, TM), as well as the download of the scientific payload data from the satellite [downlink payload, DDS (Data Downlink System)].
The antenna system with a reflector diameter of 2.5 m is capable to transmit within the commercial space research S‐band (2075 MHz ‐ 2090 MHz) with an equivalent output power of up to 20 kW and simultaneously, also within the commercial space research S‐band (2257 MHz ‐ 2278 MHz) to receive telemetry. Both are done in the right‐hand circular polarization oriented (RHCP). Simultaneously, the antenna system is able to receive the payload data in the left‐hand circular polarization LHCP with up to 10 Mbit/s in the amateur radio S‐band (2400 MHz ‐ 2428 MHz). The transceiver is the commercial satellite transceiver CORTEX CRT of Zodiac Aerospace.
In order to increase the contact time and to auxiliary ground stations in the fault case of the IRS station, a network of ground stations was established.
In LEOP (Launch and Early Orbit Phase), three DLR Ground are being used, all of which allow TM downlink and TC uplink on a live data ling using SLE through GSOC (German Space Operations Center):
• Weilheim (WHM) station in Bavaria, Germany
• Inuvik (INU) station in the Northwest Territories, Canada
• O'Higgins (OHG) station in Antarctica.
The Weilheim ground station was used during the commissioning phase. The IRS ground station shall be taken into operation during this phase and shall support more and more passes. At the end of commissioning the IRS ground station shall be the main operational ground and Weilheim shall only be used in emergencies as well. Also the ground station of GFZ (German Research Center for Geosciences) in Ny Alesund, Svalbard, Norway (NYA) shall be started to be used for automated TM downlink during this phase. This ground station only provides offline TM reception and no uplink.
For the data downlink, two additional ham radio stations at the University Putra Malaysia in Kuala Lumpur (MAL) and a private one in Kiel, Germany (KIE) may be used.
Routine Operations Phase Network: After the LEOP, the main ground station used for TM, TC, and DDS links was the IRS ground station at the University of Stuttgart. It features a 2.5 m parabolic dish with a custom designed feed to cover both the commercial and ham radio S-band. A Cortex-CRT unit manufactured by ZODIAC Aerospace is used as the baseband unit together with other COTS equipment for radio signal processing. A custom developed Java software is used to control the IRS ground station.
Furthermore, a ground station in Ny-Ålesund (NYA) on Svalbard, Norway, operated by the German Research Center for Geosciences (GFZ), is used for additional TM and payload data downlink twice a day during routine operations. Received data are transferred to the IRS network after each pass though file exchange servers.
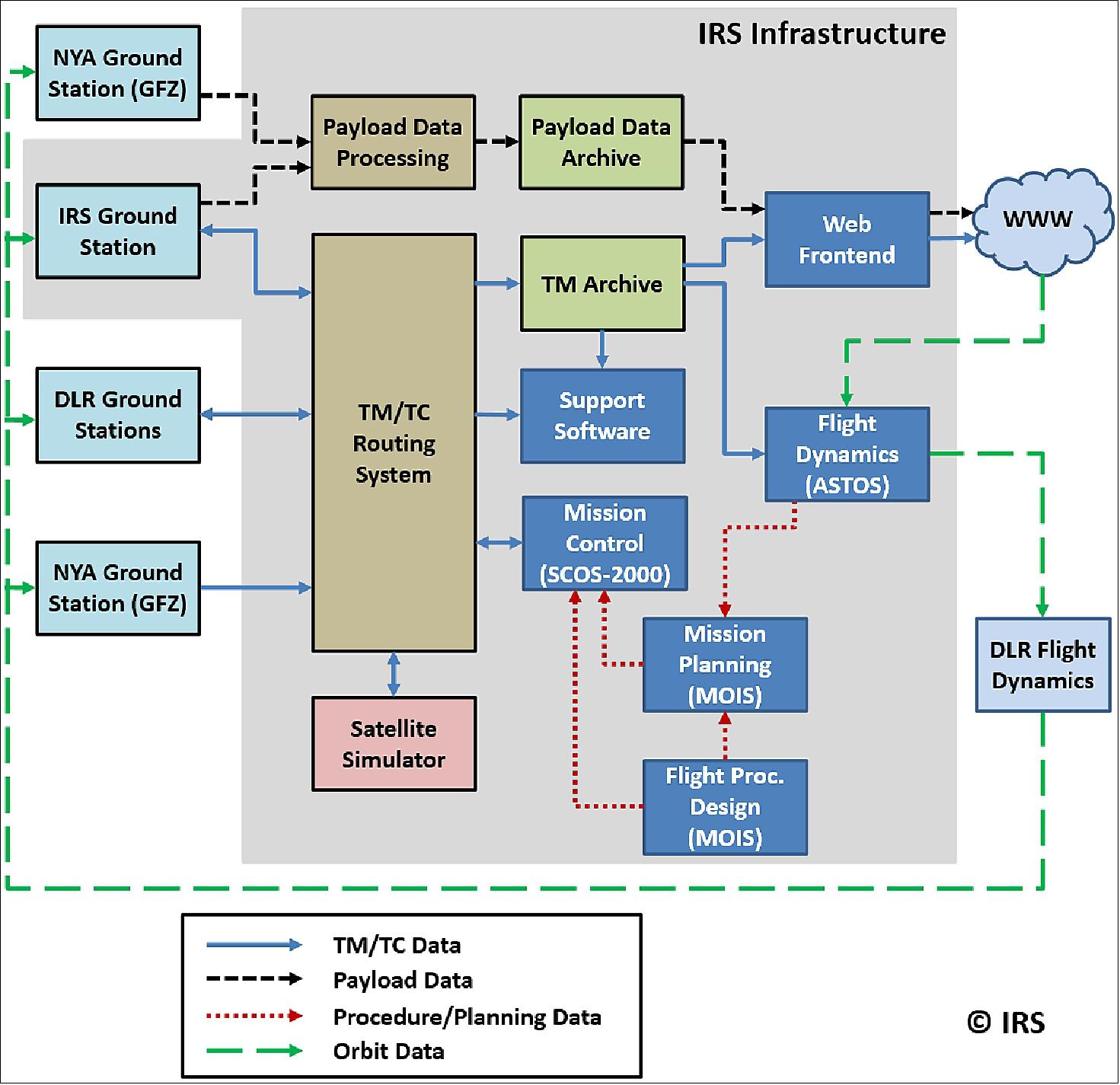
MCS (Mission Control System): ESA's SCOS-2000 (Spacecraft Control & Operation System-2000) MCS was chosen early in the project as the main control software. It is a generic MCS software with extensive manual and automatic commanding as well as TM packet and parameter display functionalities. It requires the application of the ECSS Packet Utilization Standard (PUS) for TM and TC definitions.
FDS (Flight Dynamics System): The FDS is an in-house developed Python software which can process Two Line Elements (TLE) and GPS data measured on-board from the TM Archive to propagate the orbit. For orbit propagation, the commercial Analysis, Simulation and Trajectory Optimization Software (ASTOS) tool is used, whose execution is automated by the Python software. 48)The FDS generates information on ground station passes and earth observation target visibility as well as eclipse times, which it writes to a MySQL database. This flight dynamics database is further used for pass and earth observation planning. Furthermore, the FDS generates a file containing a CCSDS standardized set of orbit parameters from the filtered on-board GPS measurements. This file is forwarded to DLR flight dynamics at GSOC, where it is converted to a TLE file. This TLE file is of higher accuracy than those provided online by NORAD and is used for antenna control at all ground stations.
Mission Planning System: For mission planning, the MOIS (Manufacturing and Operations Information System) Scheduler tool is used, which takes information on orbital events from the FDS as well as predefined FOPs as input. A human operator can plan the execution of offline FOPs (Flight Operations Procedures) based on the orbital events and check the resulting plan for conflicts based on configurable rules. From the plan, a command stack file for import into SCOS-2000 can then be exported.
Payload Data Processing: Separately from the TM/TC processing, a payload data processing chain was implemented with custom developed Java software. The reception software extracts payload data from the data stream, determines its source (camera system, AIS receiver), and handles incomplete or duplicate data by generating complete images from multiple downlinks of the same image. It then performs additional image processing and saves the data to a MongoDB database. It can then be viewed by an operator using the web frontend.
Control Room: A control room was set-up at the IRS to perform in-orbit operations as well as operational simulations for operator training and educational purposes. Two large screens show the main SCOS-2000 windows for commanding, the orbit ground track as well as a live video feed of the IRS ground station antenna (Figure 34).
It features a total of nine standard desktop computer consoles, one for each operator position. Most of these consoles feature a modern Linux installation with a virtual machine for the older SCOS-2000 version in use. At the command console, two physical machines run two SCOS-2000 servers for redundancy, whereas all other consoles have SCOS-2000 client installations, which can connect to either server as needed.

Network Infrastructure: The operational infrastructure is mainly deployed within an operational network that has very limited interfaces to other networks, including the public Internet, for security reasons. The only interfaces allowing data in- and output are the SLE connection to the DLR ground station, which has its own dedicated firewall, and a file exchange network drive that can also be reached from the IRS office network. Other interfaces only allow data to be transferred from the operational to the office network, e.g. to send notification emails and duplicate the databases to allow access via the web frontend from outside.
References
1) Information provided by Jens Eickhoff, Astrium GmbH, Friedrichshafen, Germany
2) Alexander N. Uryu, "Entwicklung eines multifunktionalen Energieversorgungssystems und Validierung anhand optimierter Testprozeduren für den Kleinsatelliten Flying Laptop," Dissertation, Institut für Raumfahrtsysteme (IRS), Universität Stuttgart, 2012
3) G. Grillmayer, M. Hirth, F. Huber, V. Wolter, "FPGA Based Attitude Control System Architecture for Increased Performance," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-VI-8
4) S. Walz, M. Lengowski, M. von Schoenermark, "Payload and Scientific Investigation of the Flying Laptop," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
5) Michael Lengowski, Fabian Steinmetz, Nico Bucher, Kai Klemich, Mark Lützner, Sabine Klinkner, Eugen Mikulz, Steffen Babben, Jens Eickhoff, Hubert Stiehle, Christoph Jean, "Environmental Flight Acceptance Tests of the Small Earth Observation Satellite Flying Laptop," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2014, paper: SSC15-P-43, URL: http://digitalcommons.usu.edu/
cgi/viewcontent.cgi?article=3257&context=smallsat
6) M. Lengowski, H.-P. Roeser, R. Haarmann, U. Beyermann, G. Gebel, "Mechanical Design of the Micro-Satellite Flying Laptop," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
7) G. Grillmayer, M. Lengowski, S. Walz, H.-P. Roeser, F. Huber, M. v. Schoenermark, T. Wegmann, "Flying Laptop - Microsatellite of the University of Stuttgart for Earth Observation and Technology Demonstration," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.P.08
8) "Der Kleinsatellit Flying Laptop," 2006, URL: http://www.tz-raumfahrt.de/pdf/FLP_Projektbeschreibung.pdf
9) G. Grillmayer, A. Falke, H.-P. Roeser, "Technology Demonstration with the Microsatellite Flying Laptop," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2005
10) H.-P. Roeser, F. Huber, G. Grillmayer, M. Lengowski, S. Walz, A. Falke, T. Wegmann, "A small satellite of the University Stuttgart - a demonstrator for new techniques," Proceedings of the 31st International Symposium on Remote Sensing of Environment (ISRSE) at NIERSC (Nansen International Environmental and Remote Sensing Center), Saint Petersburg, Russia, June 20-24, 2005
11) T. Kuwahara, F. Huber, A. Falke, M. Lengowski, S. Walz, G. Grillmayer, H.-P. Röser, "System Design of the Small Satellite Flying Laptop, as the Technology Demonstrator of the FPGA-based on-board Computing System," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07- B4.6.08
12) Fabian Steinmetz, Michael Lengowski, Daniel Winter, Lucas Salvador, Hans-Peter Röser, Pierre Rochus, "Validation of the Structural-Thermal-Model of the Small Earth Observation Satellite Flying Laptop," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013
13) Jens Eickhoff, Sam Stratton, Pius Butz, Pius, Barry Cook, Paul Walker, Alexander Uryu, Michael Lengowski, Hans-Peter Röser, "Flight Model of the FLP Satellite OBC and Reconfiguration Unit," Proceedings of the DASIA (DAta Systems In Aerospace) 2012 Conference, Dubrovnic, Croatia, May 14-16, 2012
14) Jens Eickhoff, Barry Cook, Paul Walker, Sandi Habinc, Rouven Witt, Hans-Peter Röser, "Common Board Design for the OBC I/O Unit and The OBC CCSDS Unit of The Stuttgart University Satellite Flying Laptop," Proceedings of the DASIA (DAta Systems In Aerospace) 2011 Conference, San Anton, Malta, May 17-20, 2011, ESA SP-694, August 2011
15) Sandi Habinc, Barry Cook, Paul Walker, Jens Eickhoff, Rouven Witt, Hans-Peter Röser, "Using FPGAs and a LEON3FT Processor to Build a Flying Laptop," Respace/MAPLD (Military and Aerospace Applications of Programmable Devices and Technologies) 2011 Conference, Albuquerque, NM, USA, Aug. 22-25, 2011, URL: https://nepp.nasa.gov/
respace_mapld11/talks/wed/ReSpace_A/0820%20-%20Habinc.pdf
16) Jens Eickhoff, Kai Klemich, Ulrich Mohr, Nico Bucher, Rouven Witt, Bastian Baetz, Gianluca Cerrone, Wolfgang Heinen, "Operating the Stuttgart Micro Satellite based on the Combined Data and Power Management Infrastructure," SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1730, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2014-1730
17) Kai-Sören Klemich, Michael Lengowski, Hans-Peter Röser, Justus Speichermann, "A robust and cost-effective approach for a battery system based on off-the-shelf Lithium iron phosphate cells for the small satellite Flying Laptop," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013
18) Alexander N. Uryu, Rouven Witt, Michael Fritz, Samson Houssou, Jens Eickhoff, Hans-Peter Röser, "Multifunctional Power Control and Distribution Unit for Command Chain Reconfiguration," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
19) M. Waidmann, C. Waidmann, D. Saile, G. Grillmayer, V. Wolter, "Use of new developments on attitude control sensors for the microsatellite Flying Laptop," Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.6.18
20) A. Hauschild, G. Grillmayer, O. Montenbruck, M. Markgraf, P. Vörsmann, "GPS Based Attitude Determination for the Flying Laptop Satellite," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
21) A. Brandt, I. Kossev, A. Falke, J, Eickhoff, H.-P. Roeser, "Preliminary System Simulation Environment of the University Microsatellite Flying Laptop," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
22) J. L. Jørgensen, P. S. Jørgensen, G. Grillmayer, "NEA detection, a possible use of the Flying Laptop microsatellite reconfigurability," Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany
23) "The Flying Laptop Passed Its Review," IRS University of Stuttgart, March 9, 2017, URL: http://www.kleinsatelliten.de/
news/The_Flying_Laptop_Passed_Its_Review/?__locale=en
24) "Flying Laptop — Academic Small Satellite Flying Laptop," IRS, 2017, URL: http://www.kleinsatelliten.de/
img/news/fact_sheet_neu.pdf
25) Nico Bucher, Ulrich Mohr, Bastian Bätz, Kai-Sören Klemich, Sabine Klinkner, Jens Eickhoff, "Functional verification of the small satellite Flying Laptop," Proceedings of the 11th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 24-28, 2017, paper: IAA-B11-0214
26) "ROSCOSMOS: Soyuz-2.1a Launch Vehicle with KANOPUS-V-IK Satellite Successfully Lifts Off From Baikonur," Roscosmos, July 14, 2017, URL: https://xissufotoday.space/2017/07/roscosmos-soyuz-2-1%D0%B0-launch-
vehicle-with-kanopus-v-ik-satellite-successfully-lifts-off-from-baikonur/
27) Stephen Clark, "Soyuz rocket lifts off with 73 satellites," Spaceflight Now, July 14, 2017, URL: https://spaceflightnow.com/2017/07/14/soyuz-rideshare-launch/
28) "The small satellites 'TechnoSat' and 'Flying Laptop' are successfully launched into space," DLR, July 14, 2017, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/
tabid-10081/151_read-23218/#/gallery/27594
29) http://www.russianspaceweb.com/2017.html
30) Julia Dancer, "The Flying Laptop is Being Launched from Baikonur on July 14, 2017!," IRS, University of Stuttgart, Germany, April 6, 2017, URL: http://www.kleinsatelliten.de/news/
The_Flying_Laptop_is_Being_Launched_from_Baikonur_on_July_14thx_2017x/?__locale=en
31) "Launch campaign for „Soyuz": maiden flight for our DCSM unit," Orbital Systems, May 25, 2017, URL: https://web.archive.org/web/20170606075556/http://www.orbitalsystems.de/launch-campaign-for-soyuz-maiden-flight-for-our-dcsm-unit/
32) Leena Pivovarova, "48 Doves to Launch on a Soyuz Rocket," July 7, 2017, URL: https://www.planet.com/pulse/48-doves-to-launch-on-a-soyuz-rocket/
33) https://web.archive.org/web/20200926204435/https://www.axelspace.com/en/solution_/wnisat1r/
34) "Russia will launch into orbit 72 small satellites per launch," Russian Aviation, 15 June 2017, URL: https://www.ruaviation.com/news/2017/6/15/8955/?h
35) "DLR laser terminal in space establishes contact with Japanese ground station," DLR, 25 March 2021, URL: https://www.dlr.de/content/en/articles/news/2021/01/20210325_
dlr-laser-terminal-in-space-establishes-contact-japanese-ground-station.html
36) "Successful International Joint Experiment Between Japan and Germany in the Field of Space Optical Communication Using a Small Satellite," NICT Press Release, 25 March 2021, URL: https://www.nict.go.jp/en/press/2021/03/25-1.html
37) Steffen Gaisser, Ulrich Mohr, Jonas Keim, Daniel Triloff, Sabine Klinkner, "Improvements in attitude determination and control of the small satellite Flying Laptop," Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-III-06, URL: https://digitalcommons.usu.edu/cgi/
viewcontent.cgi?article=4574&context=smallsat
38) Sabine Klinkner, Steffen Gaisser, Jonas Keim, Kai-Sören Klemich, Michael Lengowski, Ulrich Mohr, "Stuttgart University's reliable, high-performance small satellite platform on its first mission "Flying Laptop", Proceedings of the 12th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 06-10 May 2019, information provided by Jonas Keim.
39) Sebastian Wenzel, Jonas Keim, Sabine Klinkner, "Payload Mission Planning and Data Handling for a University Small Satellite Ground Segment," Proceedings of the 12th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 06-10 May 2019, information provided by Jonas Keim.
40) "DLR and the University of Stuttgart test the transmission of Earth observation data using laser communications," DLR, 3 April 2019, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/
tabid-10081/151_read-33097/#/gallery/33951
41) Christian Fuchs, Christopher Schmidt, Jonas Keim, Florian Moll, Benjamin Rödiger, Michael Lengowski, Steffen Gaißer, Dirk Giggenbach, "Update on DLR's OSIRIS Program and first results of OSIRISv1 on Flying Laptop,"Proceedings of SPIE, Volume 10910, 'Free-Space Laser Communications XXXI; 109100S (2019', San Francisco, CA, USA, 4 March 2019, https://doi.org/10.1117/12.2514349
42) K.-S. Klemich, J. Keim, N. Bucher, J. Burgdorf, M. Böttcher, S. Wenzel, U. Mohr, B. Bätz, S. Gaißer, P. Hagel, S. Klinkner, J. Eickhoff, "The Flying Laptop University Satellite Mission: Infrastructure and operations after one year in orbit," 67th DLRK (Deutscher Luft- und Raumfahrtkongress, Friedrichshafen, 4-6 September 2018 (paper provided by Jonas Keim of IRS Stuttgart)
43) "The University of Stuttgart's student project the Flying Laptop Satellite has been successfully in orbit for one year," University of Stuttgart, 13 July 2018, URL: https://www.uni-stuttgart.de/en/university/news/press-release/The-University-of-Stuttgarts-student-project-the-Flying-Laptop-
Satellite-has-been-successfully-in-orbit-for-one-year/
44) Steffen Gaisser, Ulrich Mohr, Bastian Baetz, Kai Klemich, Jonas Keim, Jens Eickhoff, Sabine Klinkner, "In-flight experience with an object-oriented flight software," 4S (Small Satellites, Systems & Services) Symposium, Sorrento, Italy, May 28-June 1, 2018
45) Jonas Keim, Kai Klemich, Nico Bucher, Jonas Burgdorf, Sabine Klinkner, Jens Eickhoff, "Operational Experience of the Transition from Initial to Nominal Operations of the University Small Satellite "Flying Laptop"," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18,B4,3,2, URL: https://iafastro.directory/iac/proceedings/IAC-18/
IAC-18/B4/3/manuscripts/IAC-18,B4,3,2,x43920.pdf
46) M. Lachenmann, S. Walz, H.-P. Roeser, "Video Compression of the Flying Laptop for low Bandwidth Satellite Links," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
47) http://www.kleinsatelliten.de/index.php/en/
neuigkeiten-mobil/131-fm-ais-empfaenger-eingetroffen.html
48) F. Cremaschi, S. Weikert, S. Schäff, A. Wiegand, "ASTOS, a reconfigurable software for design of mega constellations, operation of Flying Laptop and end-of-life disposal," Proceedings of the 15th International Conference on Space Operations (SpaceOps), Marseille, France, May 28-June 1, 2018
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top