EyeSat 3U CubeSat Astronomy Mission to study Zodiacal Light
Non-EO
Mission complete
CNES
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CNES |
| Mission status | Mission complete |
| Launch date | 18 Dec 2019 |
| End of life date | 18 Dec 2020 |
EyeSat 3U CubeSat Astronomy Mission to study Zodiacal Light
Spacecraft Launch Sensor Complement Ground Segment References
EyeSat (also spelled as EYE-SAT and as Eye-Sat) is a triple CubeSat project being developed by students from engineering schools working at the French space agency (CNES) in Toulouse, together with students from an University Technological Institute (IUT) in Cachan, France.
Since 2012 CNES has developed the JANUS (Jeunes en Apprentissage pour la réalisation de Nanosatellites au sein des Universités et des écoles de l'enseignement Supérieur) project, helping students to make their own CubeSat. Engineering schools and universities such as Polytechnique, Les Mines de Paris, ISAE-Supaéro, l'université Paris Est Créteil, l'université Paris Diderot, l'université Pierre et Marie Curie, Aix-Marseille université, Montpellier université and ELISA are supported by CNES to work on their nanosatellite. Without impacting their project specificity, some technologies are developed in common between teaching establishments in order to simplify some tasks and to prioritize teamwork as well.
In this context, the triple CubeSat Eye-Sat is being developed by students from French engineering schools (ISAE, ENAC, ESTACA) working at CNES as interns and students from IUT (University Technological Institute) de Cachan (France). Different actors are also contributing to the Eye-Sat project such as planetary scientists Anny-Chantal Levasseur-Regourd (UPMC/LATMOS) and Jérémie Lasue (IRAP-CNRS), experts from CNES and companies (e.g. Systheia or Syrlinks).
The Eye-Sat project started in September 2012 and phase A has been completed in September 2013. In the spring of 2014, the project has reached the middle of phase B. A progress meeting will take place on the end of April and the PDR (Preliminary Design Review) will close phase B on the beginning of September 2014. 1) 2) 3)
The Eye-Sat mission has two main scientific objectives:
• To study, within our solar system, the zodiacal light intensity and polarization over a wide portion of the sky at four different wavelengths. Eye-Sat is dedicated to the study, during its nominal one-year mission, of the zodiacal light intensity and polarization from Earth orbit. Measurements should be obtained, for the first time with a high spatial resolution in the 0.5° to 2° range, over a wide portion of the sky and in four different wavelengths (visible and near-IR domains).
• To provide, further away, a 360° colored picture of the Milky Way, for the project outreach.
Previous observations, mostly from the Earth and with a resolution in the 5°-15° range, have been used to infer that the local polarization at 90° phase angle increases with increasing solar distance, at least up to 1.5 au in the ecliptic, while the local albedo decreases. Simulations of the polarimetric behavior of interplanetary dust particles have suggested that, in the inner solar system, they may consist of a mixture of absorbing and less absorbing materials, that radial changes could originate in a decrease of organic materials with decreasing solar distance (probably due to alteration processes), and that a significant fraction of the interplanetary dust is of cometary origin.
Eye-Sat is a Student CubeSat which belongs to JANUS, a CNES' program that supports French Universities in developing their CubeSat projects. The specificity of Eye-Sat is that it has been developed within the French Space Agency since 2012, with more than 200 students involved.
After passing a successful qualification review before a board of CNES agents in October 2018, the project team is now in the Assembling, Integration and Validation phase with the flight model. Launch is due on October/November 2019, on a Soyouz rocket from French Guyana, with COSMOS Sky-Med from the Italian Space Agency and Cheops from the European Space Agency. 4)
Background
The zodiacal light is a faint glow present everywhere in the sky, and detectable to the naked-eye (under excellent viewing conditions) near the Sun and the ecliptic plane as a faint cone of light above the horizon, as illustrated in Figure 1. As suggested from its solar-like spectrum, the zodiacal light arises from the scattering of solar light by tiny dust particles forming a huge cloud around the Sun. This interplanetary dust cloud, practically centered at the Sun and almost symmetric to the ecliptic plane, seems to present a lenticular shape and to extend from the solar corona to the asteroid belt. The glow appears enhanced in the anti-solar direction under the backscattering from the dust particles, a phenomenon called the gegenschein. As light scattered by an optically thin cloud of dust particles, the zodiacal light is linearly polarized, up to about 20% along the integrated line-of-sight.

The goal is to study the intensity and linear polarization of the faint ubiquitous zodiacal light because it constitutes a foreground, which changes with the epoch in the year, for observation of faint extended astronomical sources (e.g. disks around stars with possibly exoplanets, galaxies).
Moreover, photopolarimetric observations of zodiacal light may lead to local properties of the interplanetary dust cloud by inversion of data gathered on the whole line of sight, and thus to a better understanding of the local properties of its constituting particles, mainly originating from comets and asteroids.
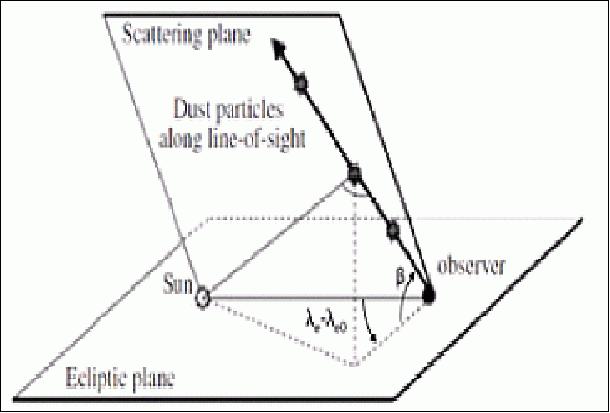
Zodiacal intensity, I, and linear polarization, P, as observed from the Earth or from Earth's orbit, depend mostly upon the epoch of observation and the upon viewing direction, related to the distribution of the dust within the interplanetary dust cloud. This distribution is essentially symmetric with respect to a plane slightly inclined on the ecliptic and also including the Sun, the zodiacal cloud symmetry plane. Helioecliptic coordinates, i.e. the ecliptic latitude β and the helioecliptic longitude λ-λs, where λ is the ecliptic longitude of the line of sight and λs is the ecliptic longitude of the Sun, are this used to describe, in a first approach, the geometry of the observations. Figure 2 represents the typical geometry of observation until now, for an observer on (or near) the Earth. Besides, the intensity varies with the wavelength as the solar spectrum, while the polarization may slightly vary with the wavelength.
Zodiacal light observations:
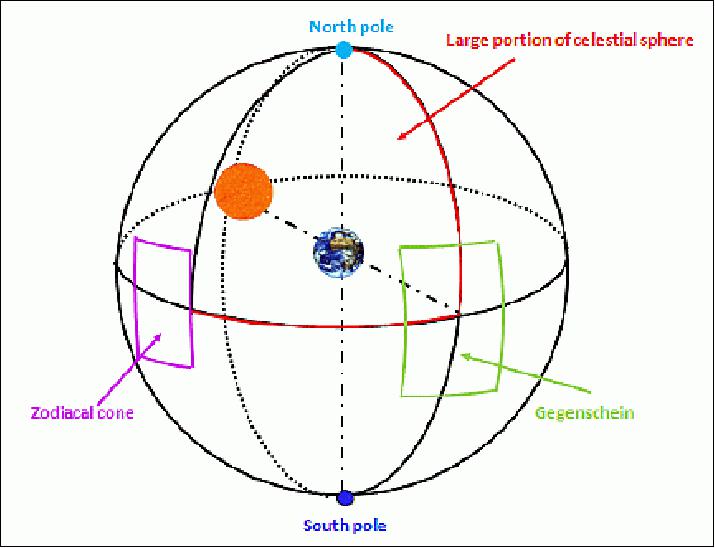
Eye-Sat will provide maps of both intensity and polarization of a large portion of the sky, defined as follow in helioecliptic coordinates. The orientation of the symmetry plane will be mostly derived from a monitoring all over the year of intensity data at the North and South ecliptic poles. The maps are defined as follows:
- A large portion of the celestial sphere : λ-λs [80°, 180°] at β [0, 90°]
- The gegenschein : λ- λs [160°, 200°] at β [-20, 20°]
- The zodiacal cone : λ- λs Є [40°, 80°] at β Є [-15, 15°]
- The region around the north ecliptic pole
- The region around the south ecliptic pole.
These maps will be provided into four spectral bands for both polarization and intensity: 400-500 nm, 500-600 nm, 600-700 nm and 750-925 nm. The spatial resolution will be between 0.5° and 2°, improving spatial resolution of previously obtained maps (in the 5° to 15° range).
The entire observation region will be observed several times during the one-year mission. As the intensity of the zodiacal light is very low (at least at more than 40° from the Sun), Eye-Sat has to carefully avoid, at least for zodiacal light studies, observing any field of view encompassing the Earth and its atmosphere, the Moon, the bright planets, as well as the Milky Way, the galactic band within ± 30° from the galactic plane. Also, any stray light contamination has to be avoided.
Lastly, a 360° colored image of the Milky Way will be taken in orbit, for the project outreach.
Technology demonstrations:
In addition to the scientific objectives, Eye-Sat will perform technology demonstrations. These technologies were developed through CNES R&D programs and their successful flight with Eye-Sat will strengthen their viability. Demonstrating state-of-the-art technologies is necessary to accomplish the scientific mission; these include:
- CMOS color detector instead of classical CCD technology
- Miniaturized X-band telemetry subsystem
- Dual core 1 GHz processor ARM® CortexTM-A9 and programmable logic (FPGA)
- Self-blocking and self-deployable composite hinges used for the deployment of solar panels and de-orbitation wings.
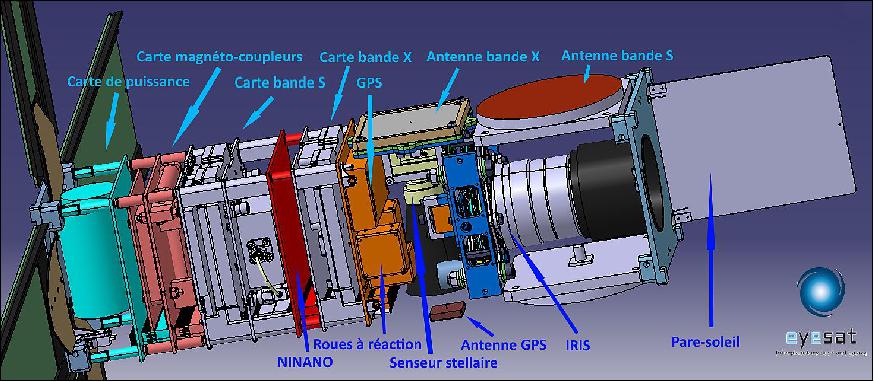
Spacecraft
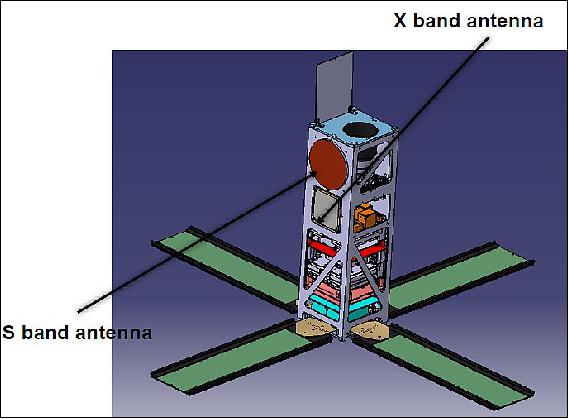
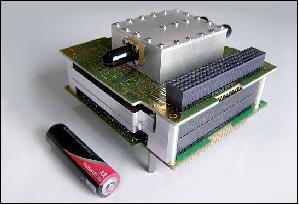
The nanosatellite (3U CubeSat) has a standard size of 340 mm x 100 mm x 100 mm, with a mass of about 5.0 kg. The maximum available power, provided by the four solar panels is 20 W. The telemetry will operate in X-band, to download up to 47 Mbit/s. A de-orbiting system, allowing atmospheric reentry within 25 years, will be included. New onboard technologies, developed by CNES R&D, include a 3-color CMOS camera and a dual-core microprocessor with programmable logic. 5) 6) 7)
Imaging of the zodiacal light and the Milky Way needs a 3-axis attitude control with a 0.25° pointing accuracy and 0.02°/s stability. The communication system has to be efficient as well. About 15 Gbit of data will be produced every day, so Eye-Sat integrates the Micro X-band HDR-TM (High Data Rate-Telemetry) transmitter connected to a directive antenna with an axis gain of 10 dBi. As a result, Eye-Sat should reach data rates of 47 Mbit/s permanently during a pass, thanks to a ground station pointing mode of the satellite.
The on-board computer is based on an ARM Cortex A9 microprocessor and supports embedded software based on time and space partitioning architecture.
The EyeSat nanosatellite required nearly 400 3D-printed parts throughout the 14 iterations of the prototyping process, and CNES and the collaborating French students used Sculpteo's 3D printing services to build those parts. The project also made use of 3D-printed parts for more than just the prototyping stage of the effort. The final version of the satellite included 3D-printed components.
ADCS (Attitude Determination and Control Subsystem): ADCS has three support modes: the detumble/safe mode, the transition mode and the nominal mode.
The first one concerns two types of phases: the very beginning of the CubeSat life just after the orbit injection, and the satellite safe mode. In the detumble/safe mode the ADCS reduces the satellite spin and makes the solar panels point towards the Sun to charge the batteries. A 5° pointing accuracy and a 3° stability during 75 minutes are enough in this mode. The detumble and acquisition time requirement is fixed to two orbits, according to the batteries' capacity.
Sun sensors and a 3-axis magnetometer are used as sensors. With the measurement of Earth's magnetic field given by the magnetometer, the time derivative of this field is calculated which gives access to the satellite rotating velocity. The satellite's attitude is directly estimated by the Sun sensor measurements. The actuators are the magnetorquers (one in each direction) and one inertial wheel turning around the axis which points towards the Sun. The detumble/safe mode is executed in three steps: firstly the angular velocity is reduced, then the inertial wheel begins to rotate in order to strengthen the gyroscopic stiffness around the pointing axis and finally the satellite points towards the Sun.
The transition mode manages the transition between the two other modes. Only the magnetometer measurements are used to estimate the satellite's attitude, by comparing the magnetic field measurements to the theoretical value given by an Earth magnetic field model. The actuators still are the magnetorquers and an inertial wheel keeps strengthening one axis.
The nominal mode requirements are more constraining since a 1° pointing accuracy is required to take zodiacal images or to dump data. Moreover taking zodiacal images requires a ±0.2° stability over 15 minutes and data dumps requires a ±0.4° stability over 5 minutes. As a result, Eye-Sat comprises a star tracker and three reaction wheels to have an accurate 3-axis CubeSat control. The magnetorquers ensure the wheels' desaturation.
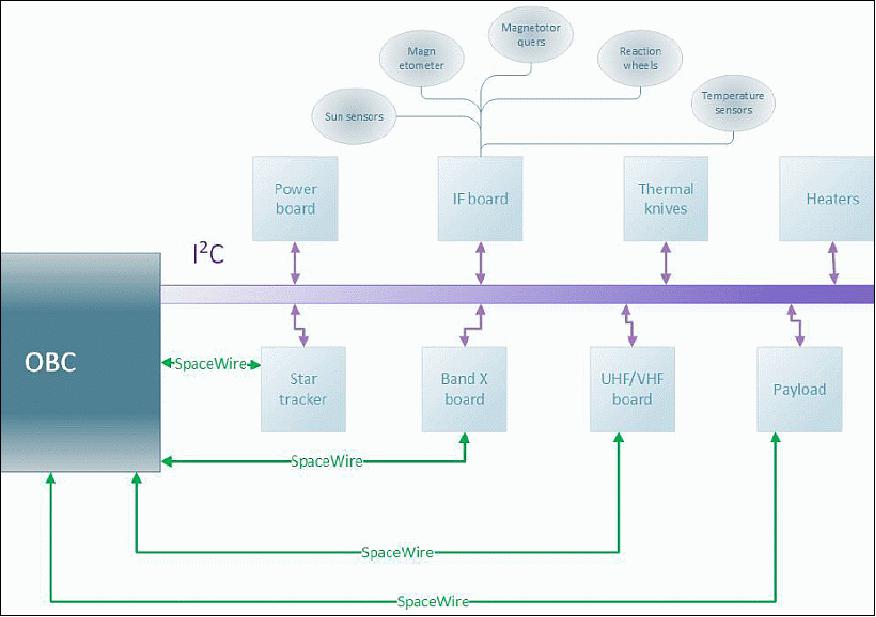
The avionics architecture is made of two means of communication, one is used for command and control and the other enables high data rate transfers. For the first one, an I2C bus was chosen with every board connected to it. For the other one, the star tracker, the X-band board, the UHF/VHF board and the payload are linked to the OBC by SpaceWire lines. The payload transfers its data at around 20 Mbit/s. The star tracker may send a bare image to the OBC if the ground wants to analyze it. Finally, the TM/TC data is transferred via the SpaceWire links, skyrocketing to 50 Mbit/s for X-band TM.
EPS (Electrical Power Subsystem): A power distribution study highlighted that 3 distribution buses are necessary: 3.3 V; 5 V and battery voltage (6-8 V). A single board is being developed to realize both power management and power distribution. It accommodates two SAFT VES 16 batteries of 32 Wh. Power comes from 20 solar cells placed on 4 solar panels (5 on each). Those solar panels are deployed with composite material hinges and held by a thermal knife. The maximum available power is 20 W in total.
Concerning the power distribution, three buses provide the required voltages. Two regulated buses give access to voltages of 3.3 V and 5 V. The last power line is unregulated. It is directly connected to the batteries and provides a voltage between 6 V and 8 V.
OBC (OnBoard Computer): The OBC architecture is centralized as far as possible. The majority of the functions such as health monitoring, thermal control, attitude control, attitude estimation (including the star tracker algorithm) and command and data handling are executed on the OBC.
The OBC uses the Zynq ZC702 developed by Xilinx, which comprises a dual-core 1 GHz processor ARM® CortexTM-A9 and a programmable logic (FPGA). The development of this board is part of a CNES R&D program. A QM will be available from January 2015.
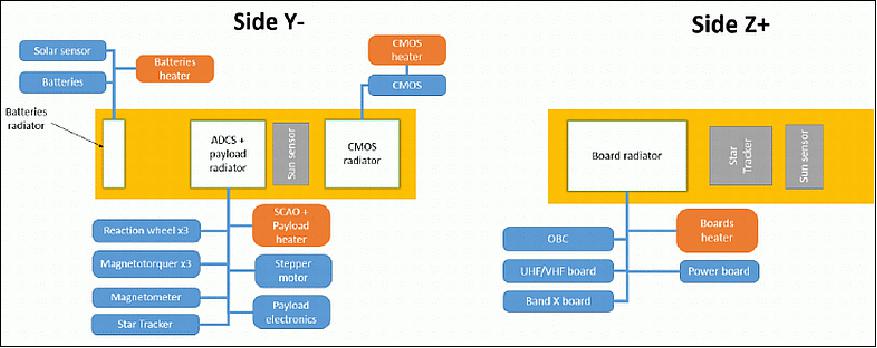
TCS (Thermal Control Subsystem): A thermal study was realized during phase A. The requirements are the following:
• The CMOS must be at 0°C ± 1°C during an image acquisition.
• The batteries' targeted temperature is 20°C ± 10°C.
• The temperatures of the other subsystems must stay between -20°C and 50°C.
A preliminary architecture has been designed, comprising heaters and radiators. Figure 8 describes this architecture. There are four radiators, one to cool the boards, a second one for the CMOS detector, another one for the batteries and a last one for the payload and the ADCS. Those radiators are accommodated on the coolest sides which are almost never exposed to sunlight. Thus, the satellite temperature is naturally low and is controlled by power variations distributed into the heaters. There is one heater for the boards, one for the CMOS detector, one for the ADCS and one for the batteries.
RF communication subsystem: Syrlinks of Bruz, France has finalized with CNES and ESA the development of a new solution to download payload telemetry in X-band at high data rate for smaller platforms, such as nanosatellites and CubeSats. This equipment is able to modulate data up to 100 Mbit/s using fully CCSDS compatible filtered OQPSK modulation and convolutional coding. It delivers up to 2 W RF with no more than up to 10 W DC/DC consumption, and fits inside a 0.25 Unit of a standard CubeSat. This miniature X- band HDR-TM (High Data Rate-Telemetry) transmitter is planned to be used on board of EyeSat.
In parallel, Syrlinks developed also with CNES and ESA a new S-band transceiver which is fully compliant with CCSDS recommendations for RF, modulation and coding, and therefore with ITU EESS (Earth Exploration Satellite Service) frequency bands for TT&C. The transmitter can provide data rates up to 3Mbit/s (OQPSK with differential coding) with an adjustable output power from 27 to 33 dBm. The receiver supports data rates from 8 to 256 kbit/s (PCM/PM/SP-L). This integrated product fits inside a 0.25U when no diplexer is used. It is a miniaturized version of an existing Syrlinks platform. This miniature S-band transceiver is also planned to be used on board of EyeSat and will satisfy the requirement that the CubeSat will look like a fully CCSDS compliant spacecraft to the ESA and CNES ground control segments. 9)
The VHF-band is used to send TC to EyeSat. The on-board antennas are omnidirectional so that the ground segment shall be able to communicate with the CubeSat even if the attitude control system does not work. For the same reason, EyeSat uses the UHF-band to send housekeeping telemetry (HKTM) to the ground in safe mode.
In nominal mode, HKTM and payload TM (PLTM) are sent through the X-band. By itself, the X-band allows the satellite to have a better data rate than the UHF-band. Moreover, as power resources are limited on-board, the downlink time is reduced thanks to the association of a directive X-band antenna with a gain of 10 dBi and a ground station pointed by EyeSat. This high data rate is necessary to transfer payload images to the ground station. Indeed the data volume is estimated to be 15 Gbit/day.
The X-band antenna is a patch antenna of 60 x 60 x 12 mm3 hence, it is suitable to be accommodated on a CubeSat side. As a result, the data rate is raised to 47 Mbit/s.
Anywaves of Toulouse supplied both the S-band and X-band antennas for the EyeSat project. The X-band board is part of an R&D program at CNES. Its dimensions are 96 x 92 x 24 mm3, its mass is < 400 g. A QM (Qualification Model) will be available on August 2014.
The payload's data is downloaded in the X-band. In order to optimize the budget link and to download the daily payload data volume (more than 12 Gbit/day), Eye-Sat points toward the X-band ground station (TETX) during a visibility pass with a directive X-band antenna with a gain better than 12 dBi. As a result, the data rate rises up to 15 Mbit/s with the TETX ground station.
EyeSat's Operational Modes
EyeSat's modes describe the satellite's life which begins with the detumbling mode. In this mode, EyeSat has to reduce its rotation velocity induced by orbit injection. Then, in the acquisition mode, the satellite rotates to make its solar panels point towards the Sun. In the detumbling mode and the acquisition mode, EyeSat keeps sending TM (telemetry) to allow the ground station to detect it. Once the Sun is pointed, EyeSat waits for TC (telecommands) to switch to the transition mode. This mode's objective is to power the star tracker on and to turn the satellite in order to free the star tracker's FOV. Thus EyeSat can switch in nominal mode, divided into four modes, the standby mode in which EyeSat's batteries charge, the guidance mode in which it maneuvers to point either a sky zone or the ground station, the imaging mode in which EyeSat realizes its mission and finally the dumping mode, in which it sends TM to the ground.
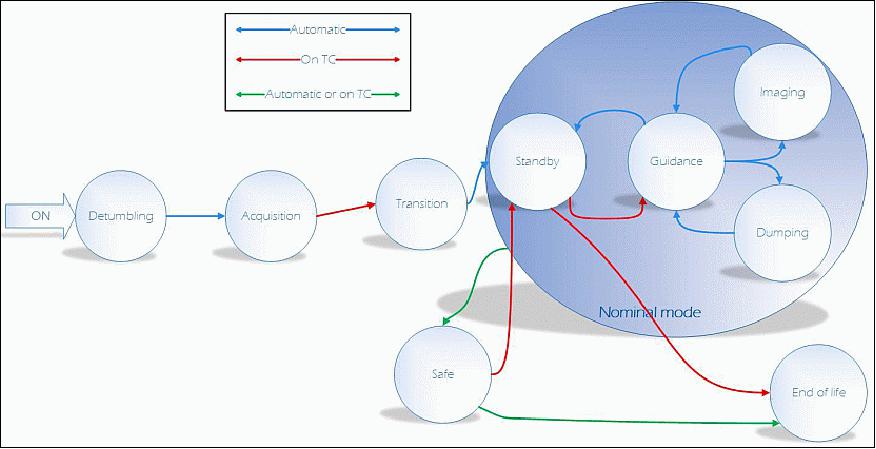
EyeSat switches into the safe mode, whenever there is any problem onboard, like a too high temperature or a too low battery power level. In the end of life mode, de-orbitation wings will be deployed to force the nanosatellite to reenter into the atmosphere within 25 years.
Launch
The EyeSat CubeSat was launched on 18 December 2019 (08:54:20 UTC) as an auxiliary payload with the CSG-1 (COSMO-SkyMed Second Generation-1) satellite of ASI (primary payload) from the Guiana Space Center in Kourou aboard a Soyuz launcher. 11) 12) 13) 14)
Orbit of secondary payloads : Circular sun-synchronous dawn-dusk orbit, nominal altitude = 700 km, inclination = 98º with LTAN (Local Time of Ascending Node) at 6:00 hours (dawn/dust orbit).
Secondary Payloads
• CHEOPS (CHaracterizing ExOPlanets Satellite)minisatellite of ESA with a mass of 300 kg.
• EyeSat, a 3U CubeSat (5 kg) student satellite of the University Technological Institute (IUT) in Cachan, France and CNES.
• ANGELS (ARGOS Néo on a Generic Economical and Light Satellite), a microsatellite (30 kg) of CNES and NEXEYA, an innovative industrial group active in the aerospace market.
• Open Cosmos deployment platform. The first mission of the UK-based service company comprises an array of CubeSats with a total capacity of 12 units (12U) and a mass of about 30 kg at liftoff. 15)
- Open Cosmos delivers effective satellite-based solutions with the goal of enabling companies to use space technologies for tackling global challenge. It specializes in the development and implementation of missions for small, low-cost satellites (up to 50 kg.), with short lead times (typically less than a year). One of the primary advantages of Open Cosmos is that it gives customers access to a wide range of launchers and orbits.
• OPS-SAT, a 3U CubeSat (6 kg) of ESA/ESOC that will allow on-orbit testing and demonstration of experimental and innovative software that may be used in future ESA missions and programs.
Sensor Complement (IRIS)
IRIS (Imager Realized for Interplanetary dust Study)
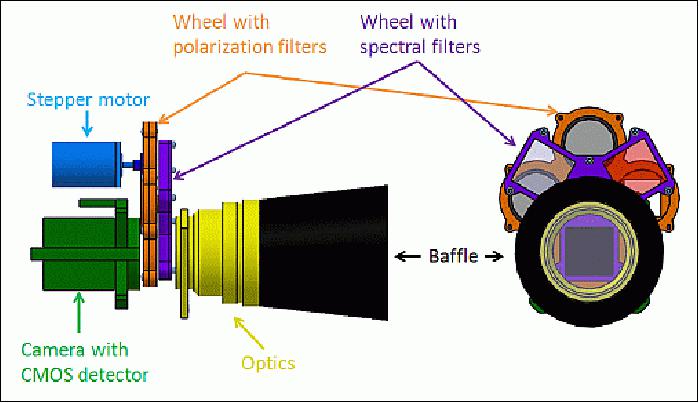
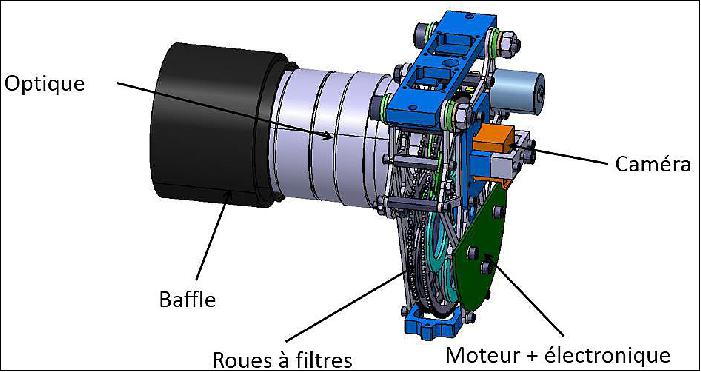
IRIS consists of a small telescope, with an optical system (13° x 13° field of view, 50 mm focal length), two rotating wheels (for the spectral filters and the shutter, and for the polarizing filters) and a detector (CMOS image sensor with a bayer pattern).
Observational constraints: Zodiacal light observations need to be free of straylight, originating not only from the Sun and the Earth, but also from the Earth's atmosphere, the Moon, the bright planets and stars, and our galaxy (typically for galactic latitudes below ± 20°). Constraints in the possibility of observing in a given direction are also related to the onboard star tracker's field of view and to the crossing of the SAA (South Atlantic Anomaly). Images of major scientific interest are to be obtained at 90° from the Sun near the ecliptic plane (providing, by direct inversion, information on the interplanetary dust properties near the Earth), towards the gegenschein region around 180° from the Sun in the ecliptic (providing information on the dust backscattering properties), and towards the ecliptic pole regions (to assess the geometry of the symmetry plane). Besides, images of the zodiacal cone (along the ecliptic, at a solar distance in the 40° to 90° range) and of the Milky Way are expected to be obtained, at least for outreach purposes.
Two wheels will accommodate spectral and polarizing filters, respectively. The science instrument, a camera using the CMV4000 image sensor, as well as a 50 mm focal length and a 1.4 aperture optics, is being developed at a French start-up company (Systhéia), specialized in micro-cameras. In addition, two rotating wheels, driven by a stepper motor are being developed. The first wheel comprises three polarization filters and a neutral beam for Milky Way imagery. The second one comprises two spectral filters (bandpass for visible imagery and highpass for the near-IR domain) and an obturator (dark calibrating image and optics protection). A 53 mm length baffle and a 150 mm length self-deployable Sun visor protect the telescope from solar stray light.
The scientific objectives define large observation regions for both the zodiacal light and the Milky Way. EyeSat's payload has a baffle in order to minimize stray light impact on the measurements. Therefore, the field of view is a tradeoff between the observation region's size and the baffle's dimensions and is set to 13°x 13°. Finally, the observation region will be divided into small meshes of 13°x 13° and reconstituted on the ground thanks to a recovering mosaic.
The camera, with a lens diameter of 35.7 mm and a FOV of 13°x 13°,has the objective to measure the intensity, polarization and orientation of the zodiacal light polarization plane. Physically, three measurements of polarized intensity along three polarization axis (0°, 60°, 120°) for each spectral band will match these objectives. Therefore, the three polarized intensities are the quantities that are systematically measured by EyeSat's payload.
A CMOS color detector, CMV4000 from CMOSIS, Antwerp, Belgium will provide this fundamental measurement in the four spectral bands. A RGB Bayer pattern is used on the CMV4000 image sensor (2048 x 2048 pixels of 5.5 µm side).It is a Bayer matrix. The camera features proximity electronics for sensor configuration, temporary image storage and SpaceWire interface management with the bus. A typical spectral response is given in Figure 15.
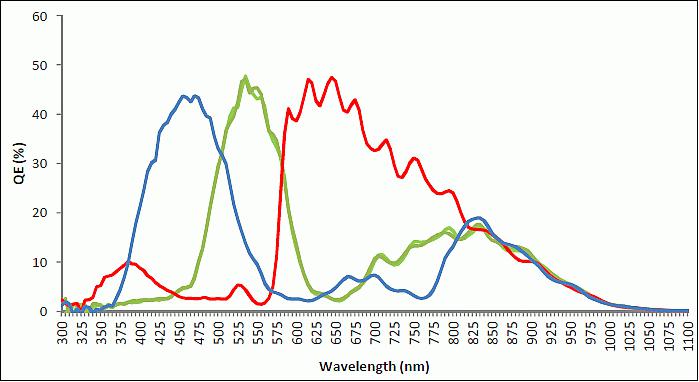
Using a bandpass filter (400 – 700 nm), a single image will measure a polarized intensity into three spectral bands: blue, green and red. Using a high pass filter (750 nm), a single image will measure a polarized intensity into the near-IR spectral band. The quantum efficiency's decrease in the near-IR spectral band will be virtually increased by the summation of neighboring pixels.
The radiometric budget leads to the following requirements for EyeSat:
- A 15 second integration time
- On ground pixel-binning matching the 0.5°-2° spatial resolution
- A detector's temperature of 0°C stabilized at ±1°C
- A summation of 10 images to increase signal to noise ratio.
Finally, the total amount of pictures needed to image a 13x13° portion of the observation region for each spectral band and each polarization axis defines a mesh. A dark calibrating image is added. Therefore, a mesh contains 2 x 3 x 10 + 1 = 61 images (2 spectral filters, 3 polarization filters, 10 images per configuration and a dark calibrating image).
Ground Segment
The ground segment is made of:
• An X band ground station (TETX) located at ENAC (Toulouse). This ground station includes a 3.4 m diameter antenna and was used for DEMETER (CNES). Students updated the station in order to fulfill Eye-Sat's requirements. An in-flight testing was done in March 2016 with GOMX-3 and validated the pointing software as well as the baseband processing (Ref. 4).
• An S-band ground station, located in Aussaguel near Toulouse. This ground station is part of CNES' ground station network.
• A mission center, located at ISAE (Toulouse). This center is in charge of the scheduling of the mission, including payload work plans but also the guidance of the X-band ground station in order to download the scientific data. The mission center also processes payload data to generate scientific products of higher value.
• A control center, located at ISAE (Toulouse). This center is in charge of the TC generation and upload to the spacecraft, the monitoring of the bus and the flight dynamics.
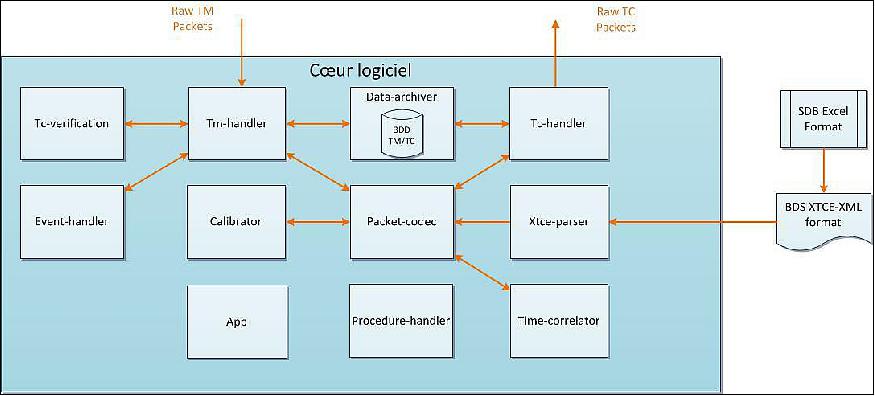
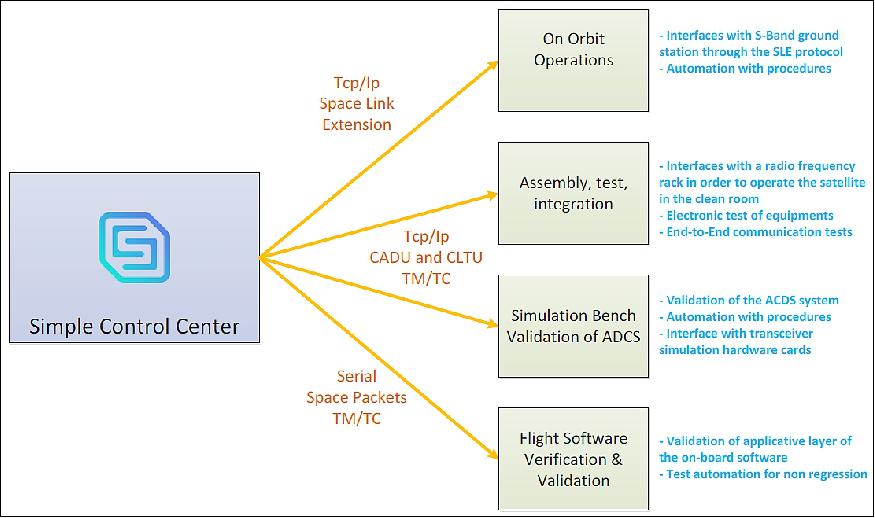
A new control center software, named SCC (Simple Control Center), based on modern technologies, has been developed. Everything is built around the Dropwizard4 framework which provides light and production proven web server with Jetty, easy central configuration management system, Restful API (Application Programming Interface) with Jersey to communicate with the front-end and to export data, powerful logging system, and some other java features: Google Guava framework, Joda Time library with powerful time converters, Java Database Interface (JDBI) for easy database SQL access. Dropwizard is not just an assembly of existing java libraries. Dropwizard ensures the integration of this toolkit so that applications remain permanently production-ready and stable.
SCC's architecture is composed by different components. Each component provides a major functionality expected by the tool. Component-oriented programming (POC) is widely used in computing. The principle is simple: the software is divided into logical elementary bricks. In this way the readability and maintainability of the code is considerably improved. Indeed, by making each logical element abstract and transparent in relation to the others, we ensure that the evolution or modification of one of the components will not impact the code of another component. This is where we get modularity and flexibility. 16)
The POC should not be confused with the object-oriented programming (OOP), which have similarities but do not operate at the same level. The OOP is equivalent to defining modules at the level of code and computer language, while the POC intervenes at the level of the overall architecture of the system/project. Component-oriented programming is very often used in conjunction with object-oriented programming.
We are using two main technologies: Dropwizard with java for the back-end, Angular5 with Typescript for the front-end. This architecture has proven to be very productive and saves us a lot of time. On the back-end we have the java object model which is representing the business logic, then with Dropwizard we expose the data seamlessly trough a REST API. The front-end or any other data user can consume the API.
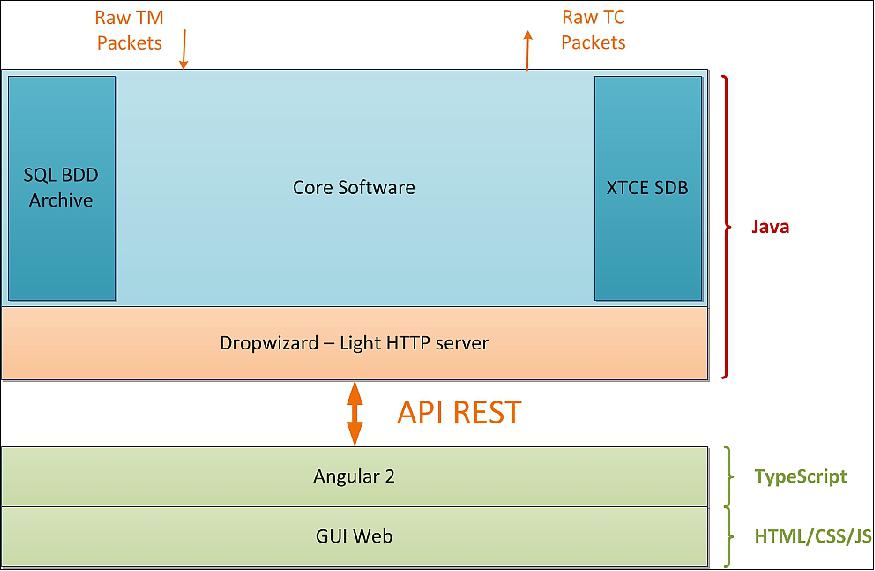
We are using the MVVM (Model–View–ViewModel) pattern. It means that there is a separation between the graphical user interface (GUI) model and back-end logic (the data model). The view model is responsible for exposing the data objects from the back-end model in such a way that they are easily managed and presented for the front-end. In our case there are really small differences between the model and the ViewModel. The ViewModel is using a lot of the main features from the model and just turns it into object that are more easily manageable for the front-end.
The front-end has a Typescript object model based on the ViewModel and the back-end offers an API which is also based on the ViewModel but in java. Everything is going throw a JSON auto generation mechanism, thus the developer's work is really effortless because as long as the object from Typescript and Java matches the back-end and front-end can communicate in native mode without developing or adding an over-layer.
Modern Technologies in Space Projects
To our knowledge conventional space projects are always behind schedule in matter of new computer science technologies and so they make little use of it when it gets out. But there are logical reasons for that:
• Firstly space projects for big satellites are usually long term project using the classic V-cycle, meaning that technologies in use on the project may have been selected years/decades before. For them it is not a problem if a software is already 20 years old, as long as it does the job.
• Secondly on these projects stability and quality have always been the number one constraints and budgets have always adapted to these constraints.
• Thirdly human resources have also never been a constraint and it always adapt to projects, so the high complexity of implementing and operating in production traditional old software solutions has never been an issue.
The point is that with CubeSats and nanosatellite the paradigm is fully reversed. The philosophy for CubeSat projects is the opposite: the main drivers and constraints on the development are to do cheap, fast, and efficient and with fewer human resources. Stability and quality are still are study of course but they are not the main drivers. This changes everything if we deal with computer science. Nowadays ground computer science technologies evolve at an impressive speed, but above all each evolution brings each time a great added value. That is why there is a huge interest in term of in terms of cost reduction, quality in software development, human resources limitation and user experience improvement. All these factors make even more sense when you associate them with CubeSats, because they are seeking for the same features.
What we learned on our projects is that space missions are really missing something huge if not using latest computer science technologies. Why? Because it brings so much more in the following fields: quality, testing environment, user experience, development environment, production environment, that using them really makes your project going to another level. It makes a huge difference both on the mission success probability and the cost reduction of the project.
Here is a non-exhaustive list of these computer science technologies we are using:
1) Dropwizard : with the benefits mentioned above
2) Angular : with the benefits mentioned above
3) Maven : for dependency and project management
4) Bootstrap front-end framework: this great library is the world's most popular front-end component library. It provide tested and ready to use component with classic dynamic behavior
5) SonarLint : This open-source tool automatically detects complex bugs and considerably improves code quality. It is one of the most advanced tools on this subject.
6) GitLab Continuous Integration platform: this is a key point, if you take the time at first on your project to setup proper continuous integration environment, it will without doubt save you more time than you could imagine. Of course setting up continuous integration is easier if you are working with the above tools like java, maven or angular.
7) Docker: it enables true independence between applications, infrastructure, developers, and operators. It gives the easily run continuous deployment both for staging and production.
You may wonder: we are just talking about the control center software, but why would this little part of the system have so much impact on the project? The answer is simple: as I said before this tool is not only used for operation, the primary main activity is also being a test mean for system. Actually there are numerous of tests that go through the control center software so it is actually the main testing mean of the system.
References
1) Fabien Apper , Antoine Ressouche, Marc Elmaleh, Adrien Palun, Maxence Montoro, Alain Gaboriaud, Christian Buil, Anny-Chantal Levasseur-Regourd, Jérémie Lasue, "Eye-Sat: a space telescope in a tripple CubeSat," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
2) A. C. Levasseur-Regourd , J. Lasue , A. Gaboriaud , C. Buil, A. Ressouche, F. Apper, M. Elmaleh, and the Eye-Sat Development Team, "Eye-Sat, a triple Cubesat to monitor the zodiacal light intensity and polarization," European Planetary Science Congress 2014, Cascais, Portugal, Sept. 2-12, 2014, Vol. 9, EPSC2014-587-2, 2014, URL: http://meetingorganizer.copernicus.org/EPSC2014/EPSC2014-587-2.pdf
3) J-L.Issler, A. Gaboriaud, F. Apper, A. Ressouche, D. Evans, O. Koudelka, P. Romano, M. Unterberger, T. Dehaene, B. Lechevalier, G. Guillois, M. Fernandez, "CCSDS communication products in S- and X-band for CubeSats," Proceedings of the AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-P4-10, URL: http://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=3014&context=smallsat
4) Fabien Apper, Antoine Ressouche, Nicolas Humeau, Matthieu Vuillemin, Alain Gaboriaud, Frédérick Viaud, Mathilda Couture, "Eye-Sat: A 3U student CubeSat from CNES packed with technology," Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-WKV-02, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4397&context=smallsat
5) Jean Pla, "Small satellites missions from the French space agency (CNES) and application of the ITU Radio Regulations," ITU-R Symposium and Workshop on small satellite regulation, Prague, Czech Republic, March 2-4, 2015, URL: http://www.itu.int/en/ITU-R/space
/workshops/2015-prague-small-sat/Presentations/PLA-CNES-2015.pdf
6) M.A. Fernandez, G. Guillois, Y. Richard, J-L. Issler, P. Lafabrie, A. Gaboriaud, D. Evans, R. Walker, O. Koudelka, P. Romano, K. T. Hansen, D. Gerhardt, "A Game-changing radio communication architecture for cube/nanosatellites," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-P-48, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3258&context=smallsat
7) Frédérick Viaud, "A working 3 reaction wheel configuration for EyeSat mission," Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
8) Te Halterman, "EyeSat Project Includes Student Engineers 3D Printing Aerospace Parts," January 15, 2015, URL: http://3dprint.com/37270/eye-sat-3d-print/
9) M.A. Fernandez, G. Guillois, Y. Richard, J-L. Issler, P. Lafabrie, A. Gaboriaud, D. Evans, R. Walker, O. Koudelka, P. Romano, K. T. Hansen, D. Gerhardt, "New game-changing on cube and nanosatellites radios," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B2.4.5
10) "CCSDS Communication Products X & S-band for CubeSats and Nanosatellite," Syrlinks, ESA, CNES, URL: http://digitalcommons.usu.edu/cgi
/viewcontent.cgi?filename=0&article=3014&context=smallsat&type=additional
11) "Arianespace's last mission of the year a complete success: COSMO-SkyMed Second Generation, CHEOPS, OPS-SAT, EyeSat and ANGELS now in orbit," Arianespace, 18 December 2019, URL: https://www.arianespace.com/press-release
/arianespaces-last-mission-of-the-year-a-complete-success-cosmo-skymed-second-generation-cheops-ops-sat-eyesat-and-angels-now-in-orbit/
12) "Arianespace Soyuz to Launch the CNES EyeSat Smallsat and to Deliver ANGELS to Space," Satnews, 11 January 2019, URL: http://www.satnews.com/story.php?number=1165558904
13) "Arianespace to launch ANGELS, the French industry's first nanosatellite, in 2019," Arianespace, 9 January, 2019, URL: http://www.arianespace.com/press-release
/arianespace-to-launch-angels-the-french-industrys-first-nanosatellite-in-2019/
14) Stephen Clark, "Launch Schedule," Spaceflight Now, 15 August 2018, URL: https://spaceflightnow.com/launch-schedule/
15) "Arianespace to launch satellite deployment solution from Open Cosmos," Arianespace, 12 February 2019, URL: http://www.arianespace.com/press-release
/arianespace-to-launch-satellite-deployment-solution-from-open-cosmos/
16) Nicolas Humeau, Thibault Gateau, "A Lightweight and Efficient Control Center Based on Modern technologies," SpaceOps Conference, Marseille, France, 28 May-1 June 2018, URL: https://arc.aiaa.org/doi/pdf/10.2514/6.2018-2634
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Sensor Complement Ground Segment References Back to top