EV-9 (ExactView-9 Nanosatellite)
EO
Ocean
Operational (nominal)
Spire
Quick facts
Overview
| Mission type | EO |
| Agency | Spire |
| Mission status | Operational (nominal) |
| Launch date | 28 Sep 2015 |
| Measurement domain | Ocean |
| CEOS EO Handbook | See EV-9 (ExactView-9 Nanosatellite) summary |
EV-9 (ExactView-9 nanosatellite)
Spacecraft Launch Mission Status Payload Ground Segment References
Overview
EV-9 is a next generation maritime monitoring nanosatellite of exactEarth Inc. through matched funding from FedDev Ontario, Canada . The project is part of a larger program managed by Communitech, a Waterloo Region commercialization hub for digital media, called “DATA.BASE”. Since 2009, exactEarth is a subsidiary of COM DEV, Cambridge, Ontario; it is jointly owned by COM DEV International Ltd and HISDESAT Servicios Estratégicos S.A., Spain.
In April 2013, Communitech, Waterloo Region’s commercialization hub for digital media, signed a contract with UTIAS/SFL (University of Toronto Institute for Aerospace Studies/Space Flight Laboratory), Toronto, Canada, to develop next generation AIS (Automatic Identification System) satellites for industrial partner exactEarth Inc. The “DATA.BASE” program at Communitech covers not only innovative AIS satellite development, but also other emerging research and development opportunities in the areas of quantum key distribution and water resource monitoring, among others. The project is about generating data that can be commercialized as a service to end users. 1)
Spacecraft
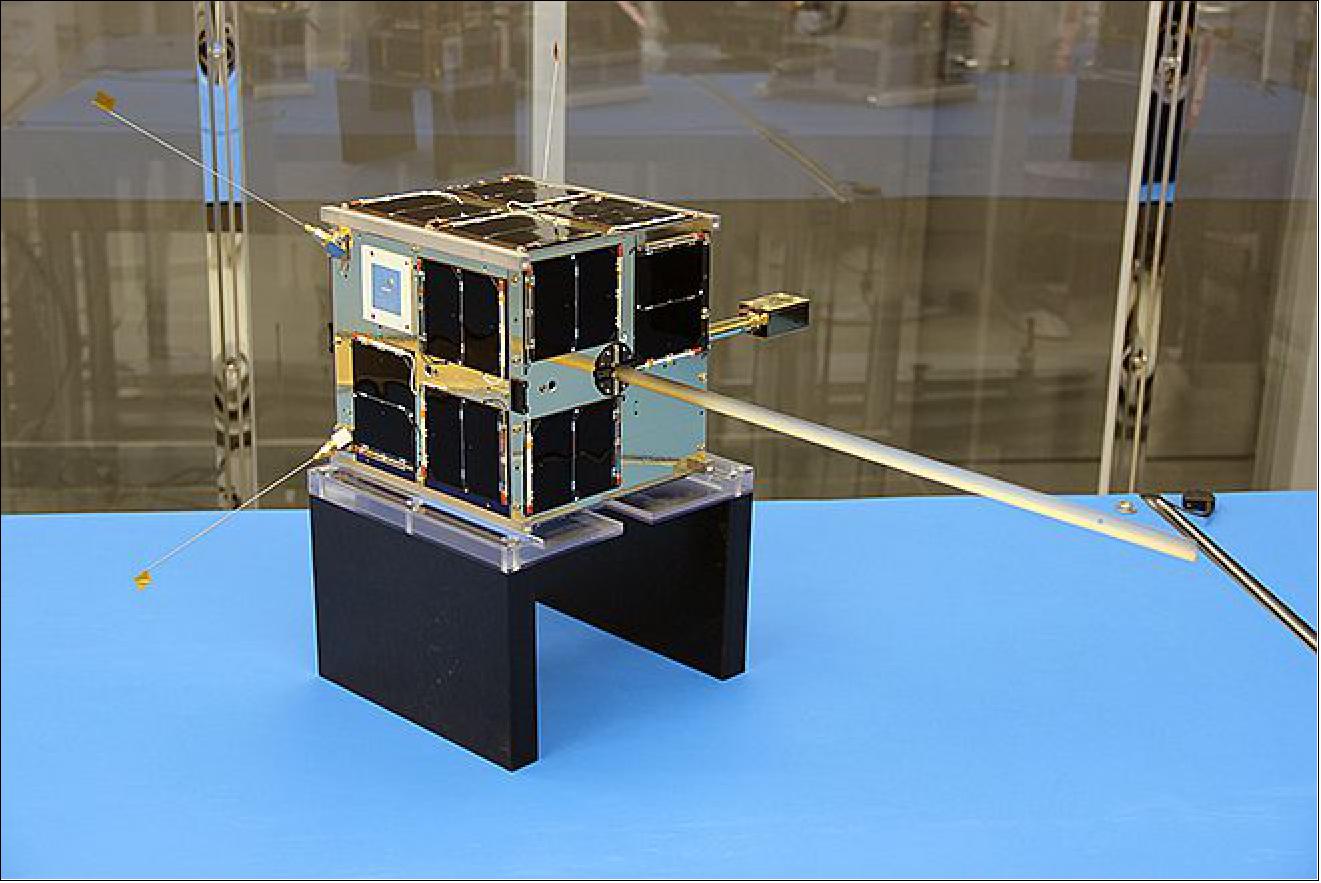
The EV-9 nanosatellite was built by UTIAS/SFL. EV-9 incorporates high performance three-axis attitude control, a next generation AIS (Automatic Identification System) receiver for high ship-detection rates, and a high speed downlink transmitter for high data volume transfers. The satellite is designed to operate in a low inclination orbit to service some of the more remote and not-as-well covered areas of Earth. 2)
The 5.5 kg nanosatellite, with body dimensions of 20 x 20 x 20 cm, uses deployable antennas and is based on SFL’s GNB (Generic Nanosatellite Bus). The satellite incorporates technological improvements and advances that enable it to perform more data intensive missions than previously possible in such a small package. The spacecraft solid model of the internal layout is shown in Figure 1.
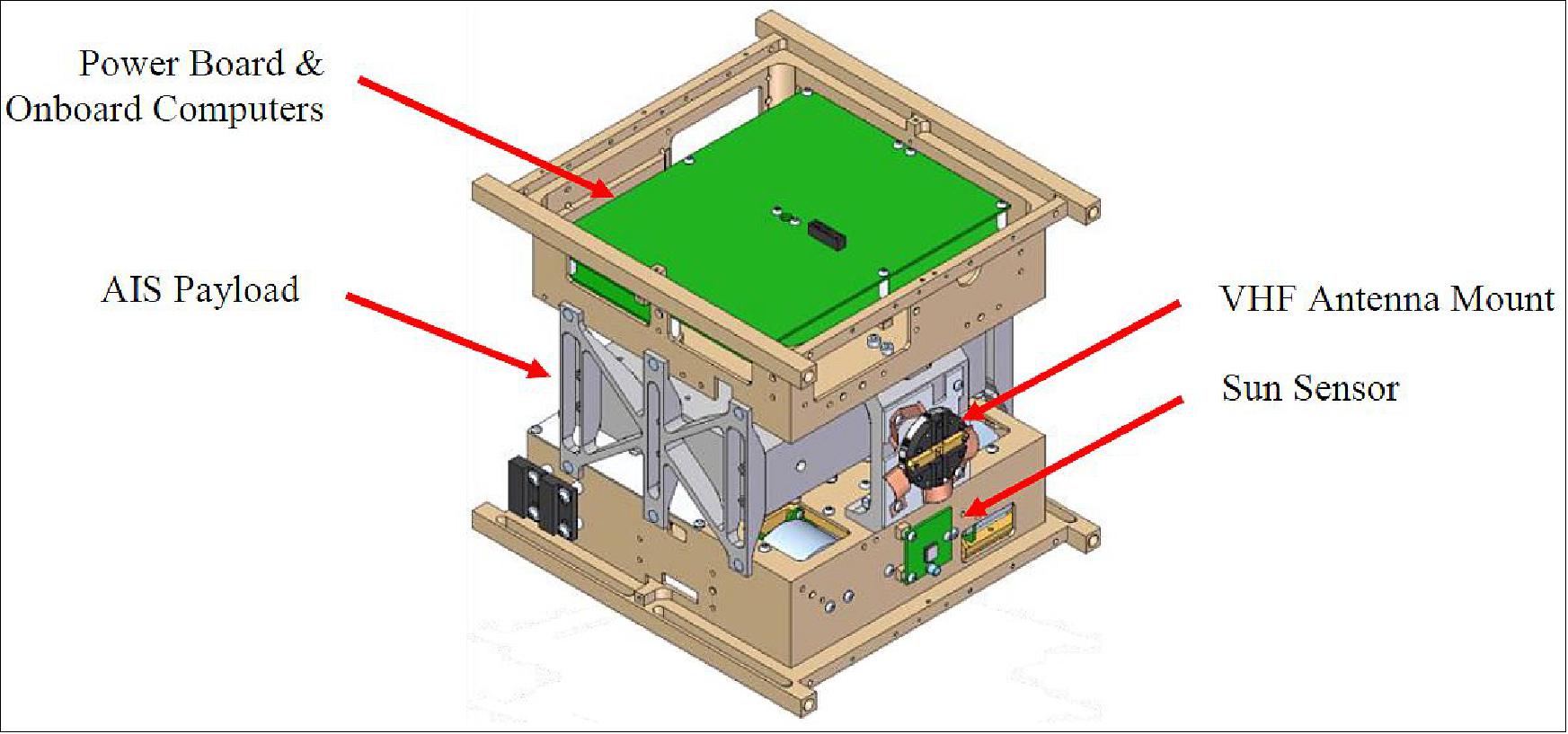
EV-9 was designed with a full complement of GNB electronics and hardware in addition to its payload. The system architecture of EV-9 is shown in Figure 2, with payload elements highlighted in yellow.
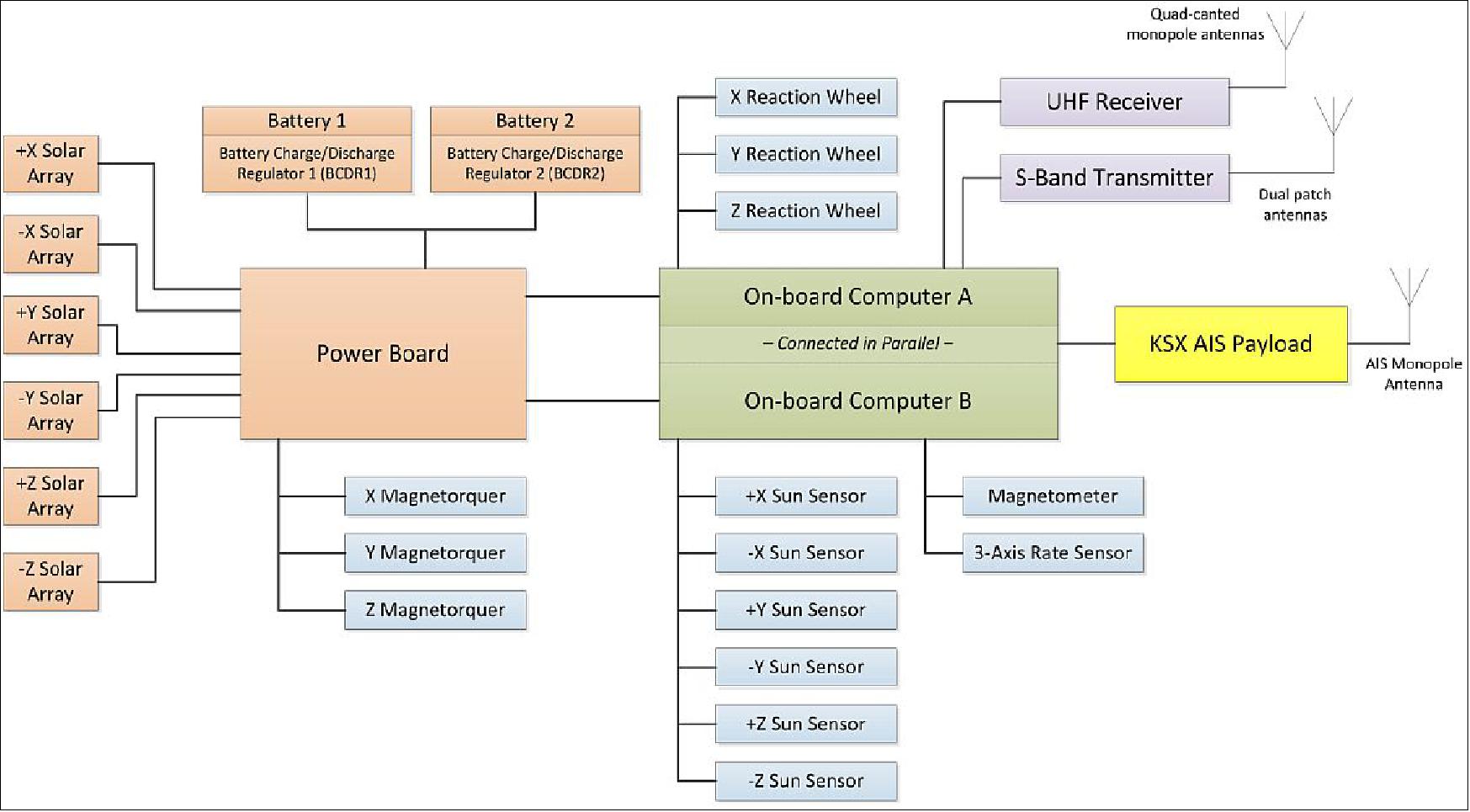
C&DH (Command and Data Handling): There are two identical onboard computers that are used for housekeeping and attitude control. One computer is nominally off as a cold spare. Each computer has 1 GB of Flash memory, which is used to store both payload data and bus telemetry.
Commands can be sent in real-time to the onboard computer during a ground station contact, or they can be time-tagged. Lists of time-tag commands can be uploaded to the computer, where they are then dispatched to the respective unit or software thread at a specified time. Responses are stored in logs onboard the computer and later downlinked during a ground station pass. This functionality supports continuous payload observations around the globe, even when real-time commanding of the payload is not possible.
EPS (Electrical Power System): The power system is a direct energy transfer topology with peak power tracking capability, consisting of 42 triple-junction GaAs solar cells and two redundant BCDRs (Battery Charge and Discharge Regulators) with dedicated single-cell Lithium-ion batteries. A central power board provides switched power distribution to all subsystems, and provides voltage and current telemetry. Solar cells are evenly distributed on all sides of the spacecraft which allows for continuous payload operations in any attitude. The power generated from the satellite on-orbit ranges from approximately 6 to 14 W.
Telemetry and Command: A UHF receiver designed by SFL is used for the command uplink. This UHF receiver operates at a fixed uplink rate of 4 kbit/s. The uplink antenna system on EV9 is an omnidirectional pre-deployed quad-canted monopole configuration (Figure 3). The downlink is achieved with an S-band transmitter, also designed by SFL. Its data rate and modulation can be scaled on-the-fly from 32 kbit/s to 2048 kbit/s, with typical operation at 2048 kbit/s. Scaling is automatically executed by ground software as the link with the Earth station improves and deteriorates throughout the pass. The antenna system used for the downlink on EV-9 is an omnidirectional pair of patch antennas bonded to two opposing satellite faces (shown in Figure 3). Radiated power is split evenly between the two antennas at all times.
ADCS (Attitude Determination and Control Subsystem): The attitude determination and control algorithms are executed at a two second period on the housekeeping computer. The attitude determination sensors include a three-axis magnetometer, six fine sun sensors, and a three-axis rate gyro – all designed and built at SFL. These measurements are fused together in an extended Kalman filter to generate quaternion and angular rate estimates used by the control algorithms. Actuation is provided by three orthogonal vacuum-core magnetorquers built by SFL and three orthogonal nanosatellite reaction wheels built by Sinclair Interplanetary. The reaction wheels are used for fine pointing control while the magnetorquers are used mainly for reaction wheel desaturation. Orbit determination provided by two-line elements is used for both orbit determination and control trajectory generation.
The spacecraft operates in two main attitude control modes: nadir-tracking using an align/constrain formulation for nominal operations, and ground target tracking during passes over the ground station. At a high level, the align/constrain targeting mode allows an operator to specify a spacecraft body axis to align with a vector in the orbit frame, while simultaneously constraining a second body vector to be as close as possible to a second vector in the orbit frame. Some examples of the alignment and constraint options include nadir, along-track, and Sun vectors. In the ground target tracking mode the spacecraft tracks a static target on the ground with a specified body axis while a second body axis is constrained to a second desired axis. In this mission the constraint vector is given by orbit normal.
Spacecraft momentum management is performed in parallel with the active control tasks and can be enabled or disabled by an operator as required. Given the desired spacecraft inertial angular momentum is entered as a setpoint, the magnetorquers are actuated to regulate the wheel speeds while simultaneously holding the desired attitude.
Launch
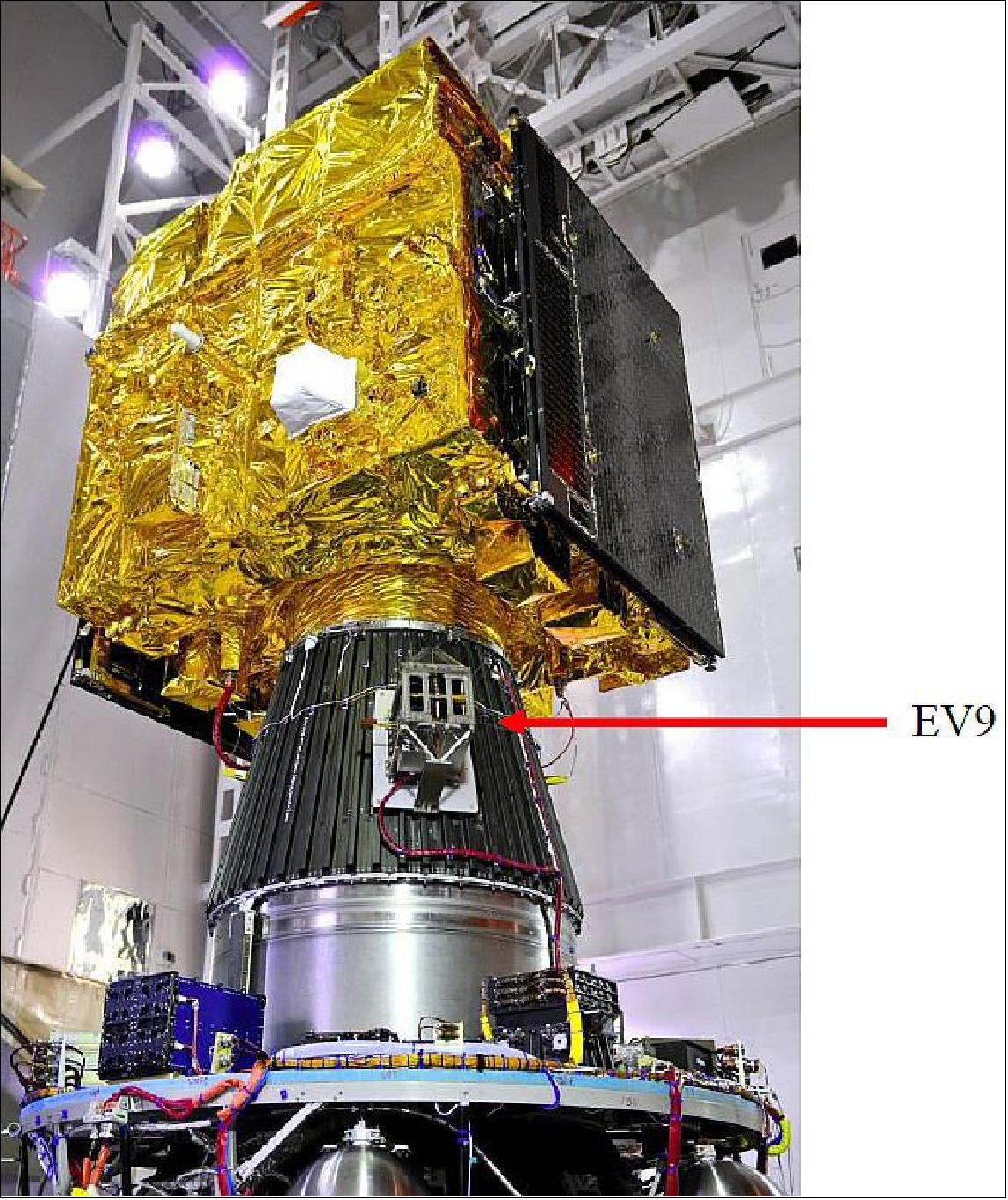
The EV-9 nanosatellite was launched on Sept. 28, 2015 (04:30:00 UTC) as a secondary payload to the AstroSat spacecraft of ISRO (primary payload)on the PSLV-C30 vehicle of ISRO. The launch site was SDSC (Satish Dhawan Space Center) SHAR, ISRO's launch site on the south-east coast of India, Sriharikota. 3) 4)
AstroSat was successfully placed into orbit and separated from the fourth stage of PSLV-C30. The separation of all the six co-passenger satellites was completed in the subsequent three minutes. The seven satellites carried by PSLV-C30 had a total mass of 1631 kg at lift-off.
Orbit: Circular NEqO (Near Equatorial Orbit), altitude =650 km, inclination of 6º, period = 98 minutes. The low inclination permits a contact with the spacecraft on every pass of the mission.
Secondary payloads on this flight were
• LAPAN-A2, a microsatellite (68 kg) of LAPAN, Indonesia
• ExactView-9 (EV9), a nanosatellite (5.5 kg) of exactEarth Inc., Canada. EV9 incorporates a next generation AIS (Automatic Identification System) receiver.
• Four Lemur nanosatellites (Lemur-2 through Lemur-5, 3U CubeSats, 4 kg each) of Spire Global, Inc. (formerly NanoSatisfi Inc.) of San Francisco, CA.
With the launch of EV-9, exactEarth is expanding its global vessel monitoring constellation to nine in-orbit satellites. The EV-9 nanosatellite will play an important role in the fight against illegal fishing.
eE Asset Name | S/C Name | Type | Launch Date | Orbit | Inclination | Altitude | S/C Owner | Status |
EV0 | CanX-6/NTS | GBP | Apr. 28, 2008 | LTAN, 10:30 | 97.83º | 630 km | COM DEV | Retired, R&D |
EV1 | ADS-1B | GBP | July 22, 2012 | LTAN, 23:17 | 98.88º | 817 km | exactEarth | Production |
EV2 | ResourceSat-2 | GBP | Apr. 20, 2011 | LDTN, 22:14 | 98º | 817 km | exactEarth/ISRO | Production |
EV6 | AprizeSat-6 | OBP/GBP | Aug. 17, 2011 | LTAN, 22:36 | 98.29º | 658 km | exactEarth | Production |
EV5R | AprizeSat-7 | OBP/GBP | Nov. 21, 2013 | LTAN, 22:30 | 98º | 650 km | exactEarth | Production |
EV7 | M3MSat | OBP/GBP | 2016 |
|
|
| Canadian Gov. | in storage |
EV8 | PAZ | GBP | Q4 2016 | LTAN, 18:00 | 98º | 514 km | exactEarth/ | in launch preparation |
EV9 | EV9 | GBP/OBP | Sept. 28, 2015 | Equatorial | 8º | 650 km | exactEarth | Commissioning |
EV11 | AprizeSat-9 | OBP | June 19, 2014 | LTAN, 22:30 | 98º | 650 km | exactEarth | Production |
EV12 | AprizeSat-8 | OBP | Nov. 21.2013 | LTAN, 22:30 | 98º | 650 km | Spacequest | Production |
EV13 | AprizeSat-10 | OBP | June 19, 2014 | LTAN, 22:30 | 98º | 650 km | Spacequest | Production |
Mission Status
• September 14, 2021: Newly listed small satellite constellation operator Spire Global is buying Canadian ship-tracking company exactEarth in its first major acquisition, inflating expectations of more space consolidation amid a surge of companies going public. 6)
- Vienna, Virginia-based Spire, which provides data-gathering and analysis services in maritime and other markets with more than 110 Lemur satellites in low Earth orbit, is acquiring exactEarth for about $161.2 million through a mix of cash and stock.
- The deal values exactEarth at just over nine times its total revenue over the last 12 months, the companies said in a Sept. 14 announcement.

- Shareholders in exactEarth will own about 3.8% of Spire after the transaction, if at least two-thirds of them approve it during a meeting they expect to hold in November.
- Spire has already got the support of around 60% of exactEarth’s shareholders, including its directors and officers.
- Peter Mabson, exactEarth’s chief executive officer, will report to Spire CEO Peter Platzer under the plan, as exactEarth becomes a fully owned subsidiary of Spire.
- “Peter and I share a vision about the opportunity for space-based maritime data and the digitalization of the global maritime industry, and I look forward to pursuing that vision together,” Platzer said in a statement.
- “I have great respect for the highly experienced team at exactEarth and am excited to continue driving this digital transformation together, serving more customers with a more robust data and solutions platform.”
- Cambridge, Ontario-based exactEarth was founded in 2009 to provide Satellite-Automatic Identification System (S-AIS) services to the global maritime industry.
- Spire said the acquisition increases its customer base by more than 75%, adding over 150 S-AIS commercial and government customers across 39 countries.
- Last year, exactEarth sold four of its satellites and associated ground stations and equipment to Australian startup Myriota, which uses them as part of a network for connecting IoT (Internet of Things) devices.
- The Canadian operator currently has 63 satellites in orbit and seven spares.
- Spire said buying exactEarth gives it an indirect ownership stake in Myriota, providing another avenue for expansion in the fast-growing satellite-based IoT market.
- Spire started trading on the New York Stock Exchange Aug. 17 after merging with NavSight, a special purpose acquisition company (SPAC).
- The merger raised $265 million in cash for investing in sales, marketing and product development operations to expand globally.
- SPACs, or blank check firms that offer companies a relatively speedy route to the public markets, are a growing trend among space startups.
- Chris Kemp, CEO of small launch vehicle developer Astra that went public July 1 after a SPAC merger, expects a wave of acquisitions will soon join the trend.
- Speaking at a Sept. 9 panel during the Satellite 2021 conference, Kemp said a round of consolidation could have decade-long implications for the satellite industry.
- Peter Beck, CEO of recently listed Rocket Lab, told the conference that his company is considering several potential deals.
SPAC symptoms
- Space companies marketing SPAC mergers to investors often point to a sizable increase in future revenues, and adding another company’s sales to the mix is one route to achieve this.
- Payam Banazadeh, CEO and founder of synthetic aperture radar (SAR) satellite imagery startup Capella Space, said this is partly why space companies with SPAC mergers are generally looking for additional sources of revenue beyond their core products.
- Speaking to SpaceNews about the space SPAC market in general, Banazadeh said: “You add more products .... that somehow gets to more revenue, right?”
- He said Capella is continuing to watch the SPAC activity in the industry from the sidelines.
- “There aren’t that many companies out there that have real assets in space, products, generating revenue, delivering things — and so we feel like we have a lot of options,” he added.
- “Unfortunately, some of the companies that SPAC’d didn’t have options and that’s why they SPAC’d.
- “And so it’ll be really interesting to see what happens to them, especially with this new market.”
- Spire has a strategic partnership with ICEYE, a Finland-based provider of SAR imaging satellites.
• March 3, 2021: exactEarth Ltd. announces that it has signed an agreement with MDA to provide advanced Satellite-AIS data services as part of MDA's recently announced Dark Vessel Detection ("DVD") program for the Government of Canada. The DVD program is intended to detect and identify vessels that have switched off their AIS transponders and are engaged in illegal, unreported and unregulated ("IUU") fishing. 7)
- IUU fishing is a global problem that results in significant economic loss - estimated at $23 billion per year by the Department of Fisheries and Oceans Canada – and leads to considerable damage to the world's fishing population and habitat. exactEarth is part of the MDA-led project that is supporting the Government of Canada's commitment to help deter IUU fishing by using satellite technology to locate so-called "dark targets", those whose AIS transponders have been switched off. Under the terms of its agreement with MDA, exactEarth will provide advanced global Satellite-AIS data services to support pilot trials of the DVD program.
- "exactEarth has been working with the global fisheries community for the last ten years and we are very pleased to expand our relationship with MDA and to be a part of this leading-edge project to help the Government of Canada in its important fight against IUU," said Peter Mabson, President and CEO of exactEarth. "IUU is a global issue and exactEarth's advanced Satellite-AIS and small vessel tracking capabilities provide an important and comprehensive real time information source in helping to detect and locate vessels that may be engaged in this type of illegal behavior."
- "MDA is pleased to play a critical role in helping the Government of Canada assert its leadership position in the prevention of IUU," said Minda Suchan, VP of Geointelligence, MDA. "Combining exactEarth's industry-leading Satellite-AIS data with imaging from satellites like RADARSAT-2 is an important part in identifying dark targets and tackling this global challenge. Thanks to the Government of Canada and our partners, these types of vessels are going to have much more difficulty avoiding detection in the future."
• February 24, 2021: Internationally, illegal, unreported and unregulated (IUU) fishing is a major contributor to the decline of fish stocks and marine habitat destruction. It also undermines the livelihoods of our legitimate fish harvesters. 8)
- Fisheries and Oceans Canada has launched a new program in collaboration with the Department of National Defence, Defence Research and Development Canada’s Centre for Security Science, Global Affairs Canada, and MDA to detect vessels engaging in IUU fishing, also known as “dark vessels”.
- The $7 million Dark Vessel Detection program uses satellite technology to locate and track vessels whose location transmitting devices have been switched off, sometimes in an attempt to evade monitoring, control and surveillance.
- The program will provide state-of-the-art satellite data and analysis to small island nations and coastal states around the world where IUU fishing has a major impact on local economies, food security and the health of fish stocks. One major concern for our government is the impact IUU fishing has on food security, where fish resources of vulnerable coastal communities are threatened by the illegal fishing, affecting millions of people.
- Identifying “dark” vessels from above will now allow these small island nations to focus their investigations and maximize their enforcement effort to protect their fish stocks.
- Program partners include the Forum Fisheries Agency (which represents 15 small island nations in the Pacific region), and the Ecuadorian Maritime Authority, National Directorate of Aquatic Spaces (which is in charge of surveillance and control in the Ecuadorian maritime domain). In December 2020, Canadian and Ecuadorian officials signed a memorandum of understanding to formalize their partnership, and enhance surveillance around the Galapagos Islands – a UNESCO World Heritage site.
- The Dark Vessel Detection program is part of the $11.6 million in funding for Canada’s commitments to ocean health announced at the 2018 G7 ministerial meeting in Halifax, Nova Scotia.
• As of January 2018, exactView has 18 satellites in its RT (Real-Time) Constellation Now in Service, powered by Harris. The latency rates have been reduced to one minute! This translates into the quickest, most accurate Satellite AIS data service commercially available, and enables the customer to complete his maritime picture faster from the industry’s most reliable and dependable service provider.
- Additionally, the Dec 22 (2017) Iridium NEXT launch successfully carried ten more of our real-time payloads into orbit where they are now undergoing standard commissioning and are expected to be brought online in the next few months. - This revolutionary real-time service provides global, continuous coverage which literally opens a world of new application possibilities.
• As of August 29, 2017, exactEarth, in partnership with Harris Corporation, is bringing five more satellites from our ever-growing real-time (RT) constellation into service. These additional satellites will raise the total to nine in our real-time system that have been successfully incorporated into exactEarth services. 9)
- Combined with our first-generation satellites, we are proud to be operating the largest satellite AIS constellation in the world. Eight more real-time satellites are set to launch with Iridium NEXT on October 4th as we continue to add to our revolutionary 2nd generation system.
- Representing a brand-new capability for the global maritime industry, exactEarth effectively tracks more than 250,000 vessels worldwide.
- When fully-deployed, the exactEarth system will consist of more than 70 payloads delivering actionable data in mere seconds and will enable significant advances in maritime safety, security and efficiency.
• May 2016: On-orbit performance: exactEarth delivers a global capability for monitoring over 200,000 AIS-equipped vessels using a strategically placed satellite constellation and global network of ground stations [4]. Given that the traditional land-based vessel tracking is limited to 50 nautical miles in most areas, there are a number of applications for global vessel tracking that require visibility well beyond the terrestrial coverage. These include national security, border protection, search and rescue, fisheries and environmental monitoring, logistical planning, commodity trading, and vessel fleet management to name a few. For all of these applications, a number of parameters are very important considerations with respect to an AIS asset or the capabilities of an entire satellite AIS constellation: 10)
- Revisit – time interval between when the satellite is acquiring data over an area
- Latency – time duration between when a message is sent out by the ship and the when it is delivered to the customer through the exactEarth data feed.
- Detection – percentage of ships detected over an Area of Interest (AOI) over a defined time period.
The EV-9 satellite has a unique orbit of 6° inclination. The equatorial orbit provides very frequent refresh of the maritime vessel environment in equatorial regions. The EV-9 orbit also complements the detections provided by the remainder of the exactEarth satellite fleet in higher inclination (generally polar) orbits that provide more frequent revisits at the higher and lower latitudes. The addition of EV-9 has made significant improvements to the global revisit values for the entire constellation.
The EV-9 nanosatellite, in conjunction with the ground segment, has been able to demonstrate latency improvement with a tactically placed ground station and custom mission management tools. In addition, it has a real-time message streaming mode, in which the messages are sent to the receiving ground station immediately upon acquiring the message from the ship. This mode allows for minimal latency of the messages, and is used over strategic ground station locations.
The EV-9 AIS payload has demonstrated excellent performance characteristics. Its capability to acquire in both OBP (Onboard Processing ) mode as well as raw spectrum captures for on-ground processing allow for a targeted concept of operations. Onboard processing decodes AIS messages directly on the satellite using narrow band filters, whereas the capture of the AIS RF raw spectrum requires processing on the ground using highly specialized algorithms. The equatorial orbit predominantly consists of low ship density areas, where the OBP detection mode performs very effectively. The raw spectrum mode acquisitions are then targeted over the more congested areas, and the data is routed to the exactEarth Data Processing Center, which includes much more rigorous processing that can extract an even greater number of messages from the capture. The power subsystem has been designed to support 100% payload duty cycle, which allows for maximum OBP and spectrum captures in areas of interest. High profile areas of interest can provide service that includes both real-time OBP messages and ground processed spectrum with harder to detect messages.
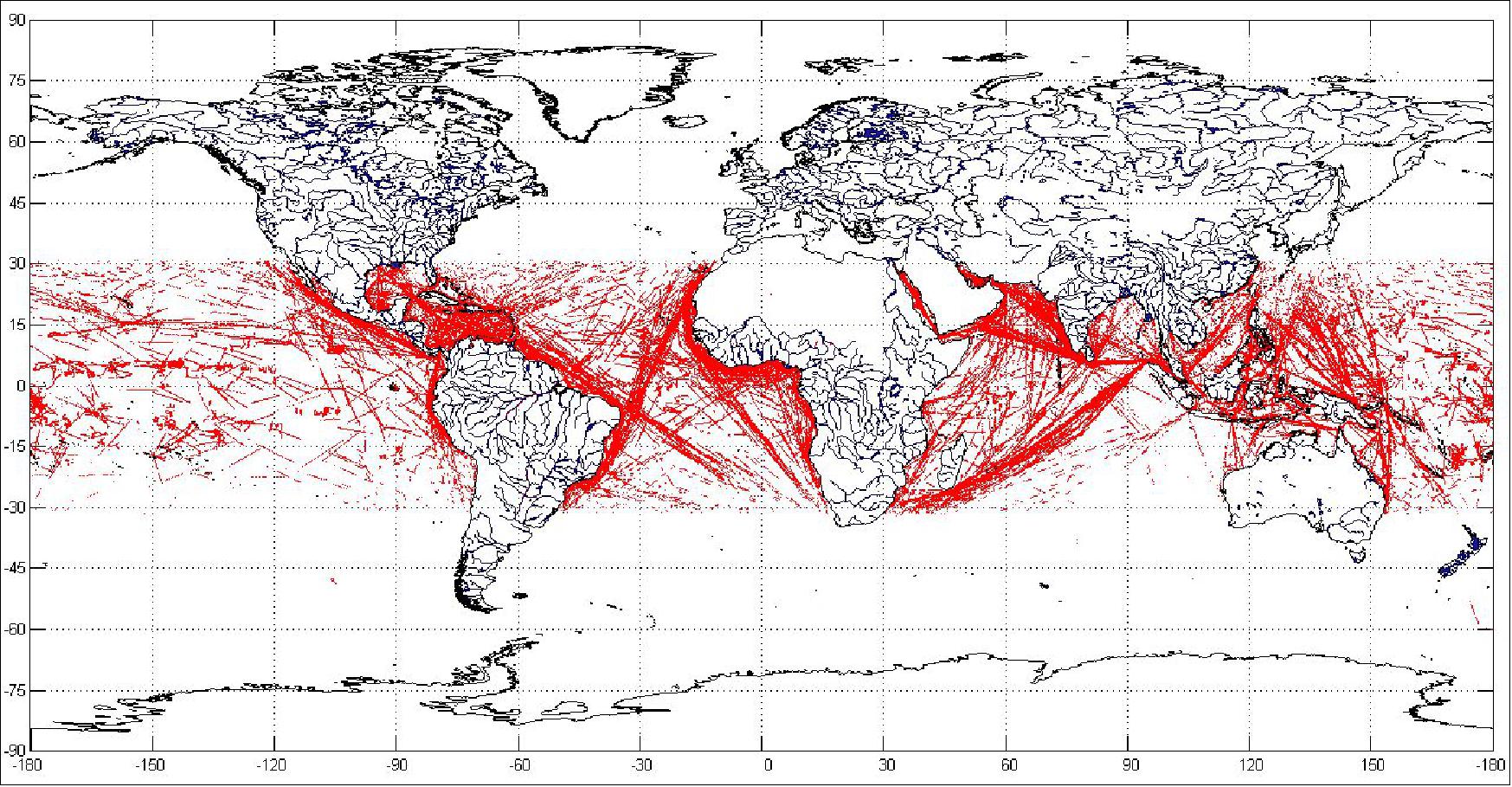
The high detection rate for the EV-9 AIS receiver payload is evident based on the distinct ship positional tracks as well as very clear delineation of shipping lanes illustrated in Figure 6, even within the relatively short observation time interval of two days. Moreover, the excellent sensitivity of the EV-9 receiver allows for a relatively wide coverage access about ±29 º of latitude about the 6º inclination equatorial orbit, as evidenced by the strong ship detection right out to the edge of coverage.
The advanced attitude control of EV-9 allows for even further utilization of EV-9’s capabilities. The three-axis control and the evenly distributed thermal, power and communications design allows for the satellite to perform payload specific pointing and tracking of AOIs (Areas of Interest) to improve detection performance. In addition, tracking the ground station using the downlink antenna maximum gain orientation allows to maximize the downlink throughput, supporting the larger data-volumes associated with the spectrum acquisition mode.
- As of January 2016, all commissioning activities were concluded and exactEarth took over full operational responsibility of the mission. The EV9 mission has demonstrated that a high degree of operational performance and reliability can be obtained from a nanosatellite platform. The addition of this equatorial satellite to the exactView constellation has complemented the existing polar satellites by providing shorter revisit intervals to some of the densest shipping areas in the world.
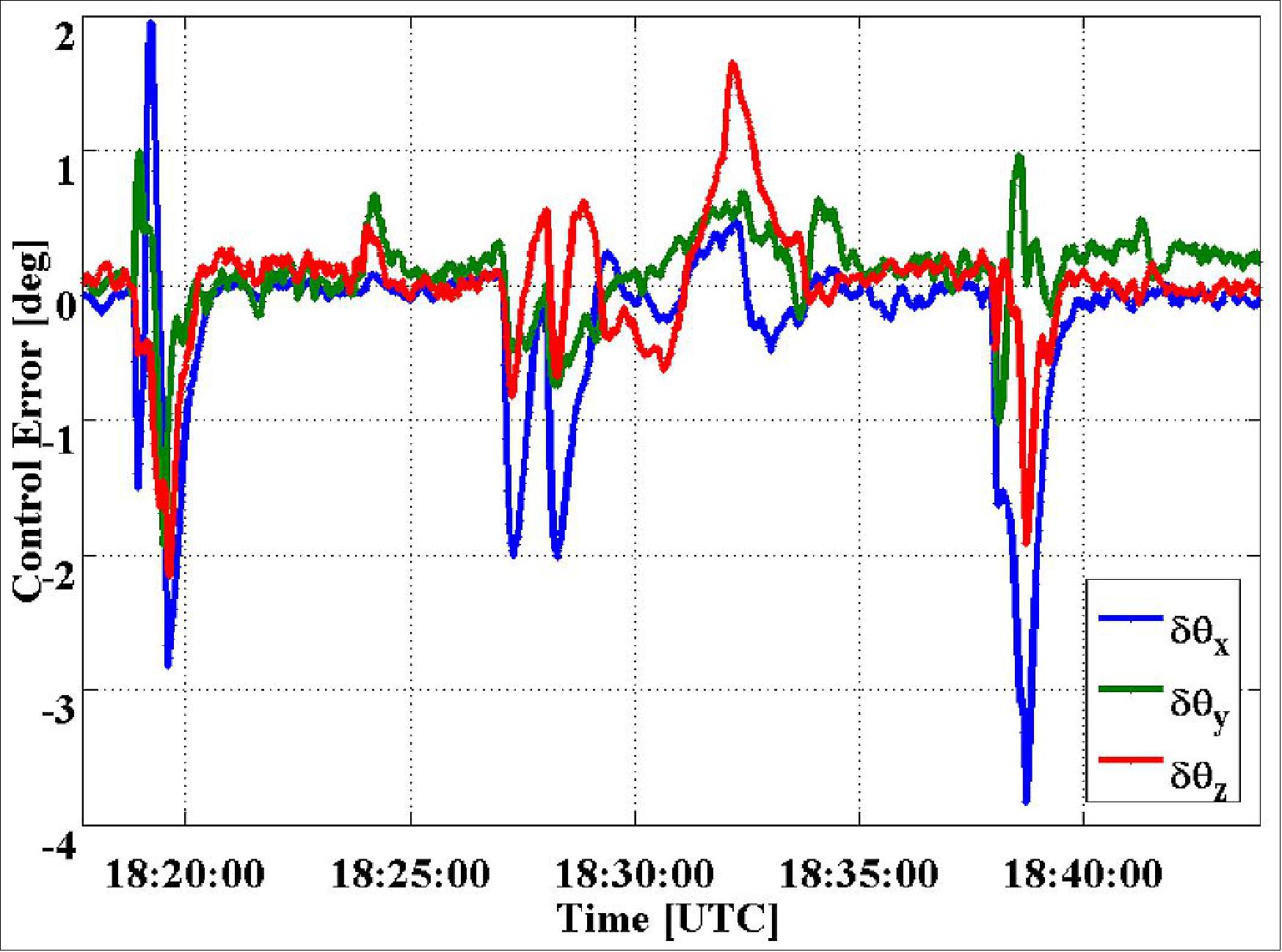
- Attitude Control: The spacecraft pointing performance was analyzed during a routine downlink scenario on 10 December 2015 as shown in Figure 7. In this scenario the spacecraft starts in a nadir-tracking attitude, autonomously transitions to a ground-target tracking attitude to maximize data downlink, transitioning back to the nominal attitude at the end of the pass.
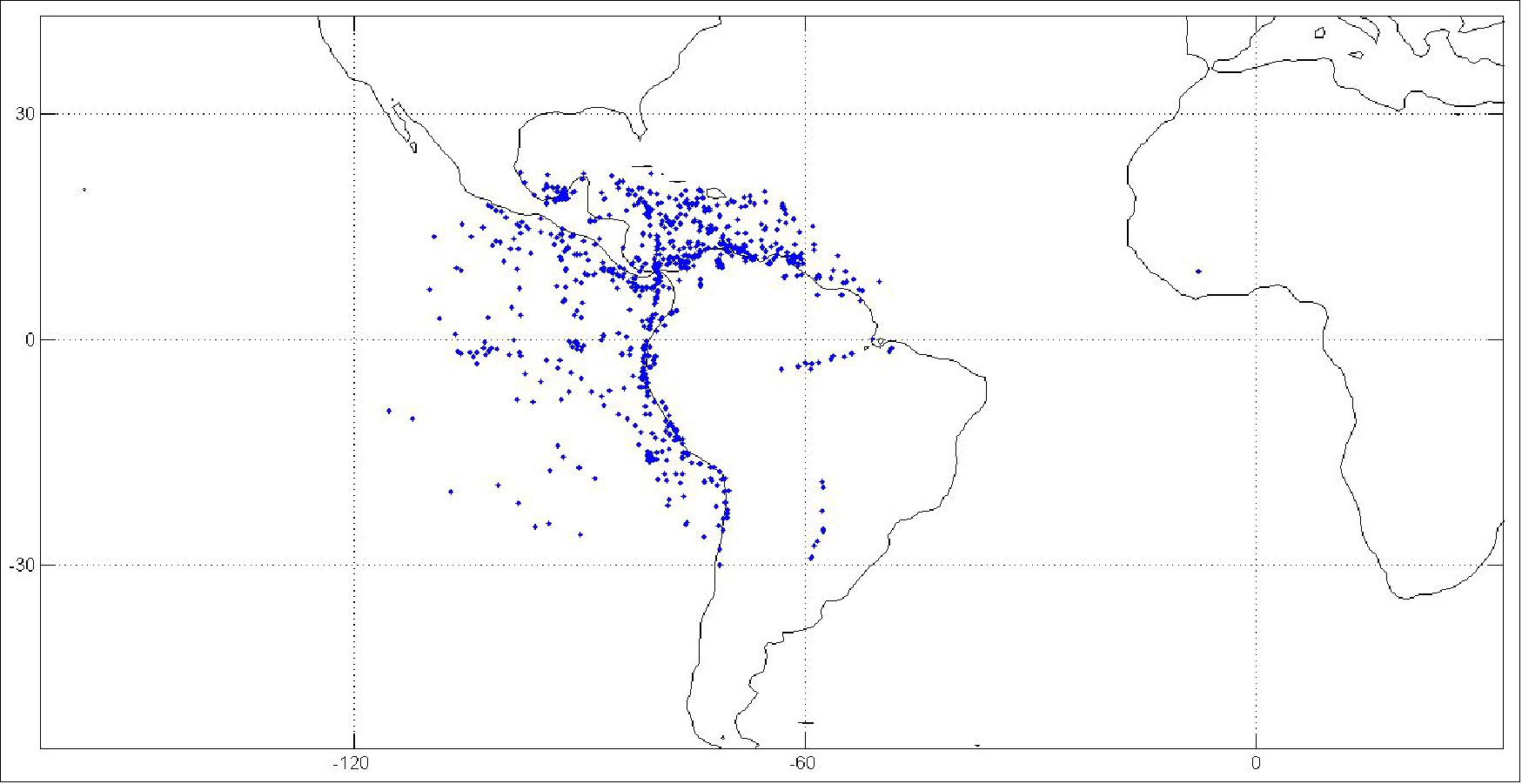
- LEOP (Launch and Early Operations Phase): EV-9 was successfully deployed into an equatorial orbit with an altitude of 650 km and an inclination of 6°. Initial acquisition with EV-9 was made on the first contact at 05:25 UTC on Sept. 28, 2015. During the first good contact, application software was loaded on the onboard computer and the AIS receiver was switched on and commanded to decode messages from all four channels. During that pass, EV-9 received 5035 messages from 1498 unique vessels in approximately seven minutes. Figure 5 shows a map of the messages received during the first contact that the payload was powered on.
• About 23 minutes after liftoff on Sept. 28, 2015, EV-9 was ejected from the upper stage of PSLV-C30 using an XPOD provided by SFL. EV-9 was contacted during the first pass over its equatorial ground station. SFL is supporting commissioning and will hand over operations to exactEarth when done. EV-9 is operated from exactEarth’s mission control center in Cambridge, Ontario. 11)
Sensor Complement
AIS payload
The payload onboard EV9 is comprised of an advanced Kongsberg Seatex AIS receiver and associated VHF monopole antenna. The AIS receiver is a software defined radio operating across the maritime band from 156 MHz to 163 MHz. The VHF antenna on EV9 is a deployable tape-measure monopole design.
EV-9 employs a next generation AIS payload and supports exactEarth’s patented ground-based AIS spectrum processing technology in order to deliver superior vessel detection performance. EV-9 will be supported by a network of high data rate Earth stations enabling exactEarth to rapidly provide data to global customers. The nanosatellite will also be able to provide high performance detection of low power class B AIS transceivers, outfitted with the ABSEATM detection technology, for the small vessel market. Equipping fishing fleets and other small vessels with these inexpensive, satellite-enabled class B AIS transceivers is an important element of the fisheries management strategy for countries in this region to combat the very significant illegal fishing problem and to improve their maritime safety and security.
The successful launch of exactEarth's first equatorial orbiting satellite is another important step in the growing constellation of satellites offering the most comprehensive and highest performance ship tracking service available. The equatorial region contains some of the world’s densest shipping areas so it is essential to have a satellite AIS technology which can deliver high detection performance serving this region’s customers.
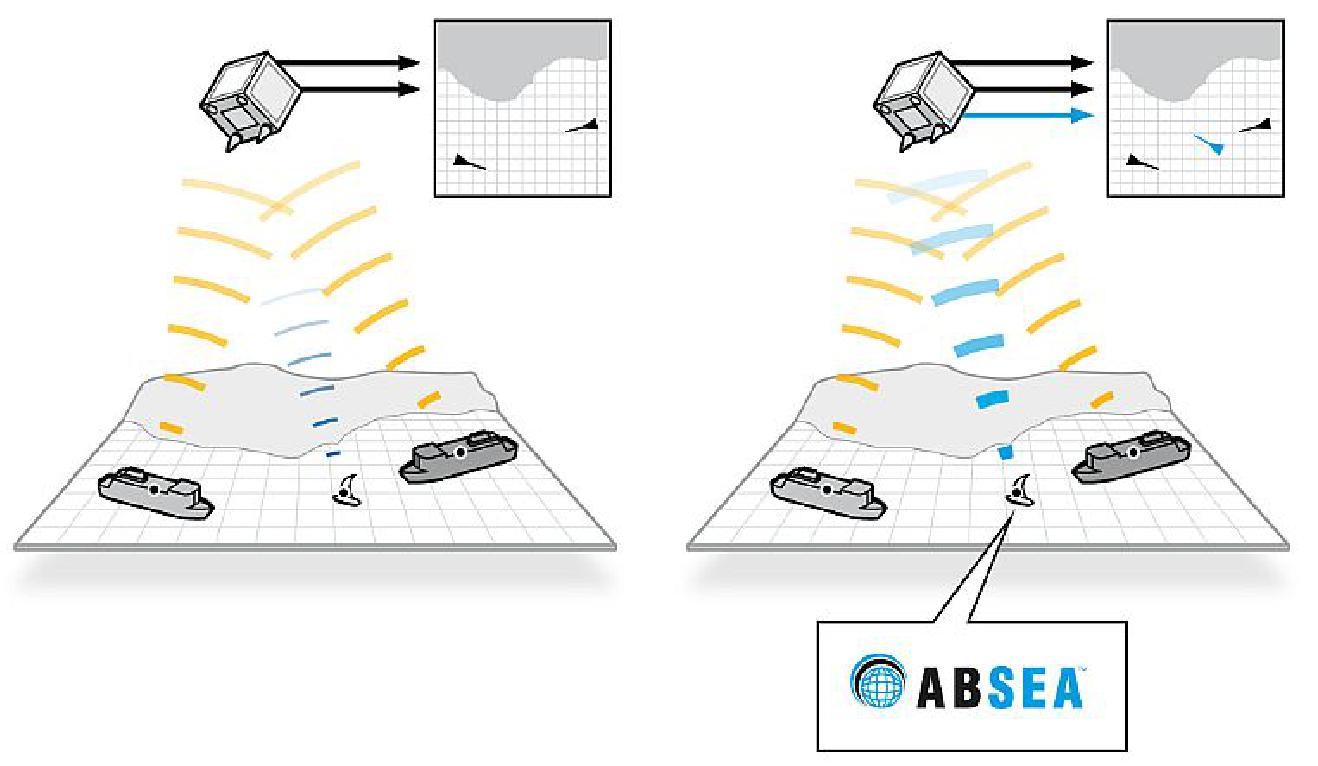
ABSEA (Advanced Class B Satellite Enabled AIS) is a unique new technology which enables the transmissions from AIS Class B and Identifier type AIS transceivers using SRT (SRT Marine Technology, Bath UK) core technology to be reliably received by the exactEarth global satellite network. The combination of ABSEA with exactAIS Trax™, the Satellite AIS data service provided by exactEarth, results in a new global monitoring capability to track any vessel, regardless of size. 12)
ABSEATM technology overcomes the challenges involved in detecting low power Class B AIS transmissions by satellite. The combination of advanced & patented signal processing techniques and unique AIS transceiver technology enable reliable detection of low power AIS transmissions from Class B or ‘Identifier’ tracking devices.
ABSEA is fully compatible with existing AIS infrastructure and enables vessels to be tracked by both coastal receiver networks and by satellite. Fusion of the data from these sources enables a seamless tracking solution with the benefits of detailed tracking close to shore and regular, reliable reporting beyond the horizon.
Ground Segment
The Earth station for EV-9 operations is located just outside of Panama City, Panama ( Figure 10). The Earth station consists of both a UHF station and an S-band station. The UHF station is a 4-antenna Yagi array and supporting equipment, including the polarization controller and power amplifier. The S-band used for downlink purposes consists of a 4.3 m composite prime focus antenna, with receive frequencies between 2200 and 2310 MHz. Both antennas are shielded using radome assemblies. The equatorial location of the ground station permits contact with EV-9 in all of the satellite’s 15 daily orbits. Expansion of the Earth station network for EV-9 operations is underway, with a second site coming online in Singapore later in 2016.
For the Panama ground station which has a 3º minimum elevation horizon mask, the average download capacity is 1.2 GB/day. This assumes the satellite’s attitude control system is target tracking the ground station with the S-Band antenna to maximize gain. When EV-9 target tracks the ground station, it is able to achieve a 2 Mbit/s downlink with a 3 dB margin at worst case.
Telemetry and logs downloaded from EV-9 are routed from Panama to the NOC (Network Operations Center) located at the exactEarth facilities in Cambridge, Ontario.

References
1) ”Next Generation Automatic Identification System Satellites to be Developed under Communitech Program,” UTIAS/SFL, April 19, 2013, URL: http://utias-sfl.net/?p=996
2) ”Nanosatellites: EV9,” UTIAS/SFL, January 25, 2014, URL: http://utias-sfl.net/?page_id=1271
3) ”PSLV Successfully Launches India’s Multi Wavelength Space Observatory ASTROSAT,” ISRO, Sept. 28, 2015, URL: http://www.isro.gov.in/update/28-sep-2015/
pslv-successfully-launches-india%E2%80%99s-multi-wavelength-space-observatory-astrosat
4) ”exactEarth Launches Advanced Equatorial AIS Satellite,” Sept. 28, 2015, URL: http://www.exactearth.com/media-centre/
recent-news/287-exactearth-launches-advanced-equatorial-ais-satellite
5) ”The exactView™ Constellation,” exactEarth, URL: http://cdn2.hubspot.net/hub/
183611/file-510655411-pdf/Collateral_for_Download/Rebranded_Collateral/exactView.pdf
6) Jason Rainbow, ”Spire snaps up exactEarth in first acquisition as a public company,” SpaceNews, 14 September 2021, URL: https://spacenews.com/
spire-snaps-up-exactearth-in-first-acquisition-as-a-public-company/
7) ”exactEarth to provide Advanced AIS services for MDA's Dark Vessel Detection Program,” exactEarth Press Release, 3 March 2021, URL: https://www.exactearth.com/
2021-03-03-exactEarth-to-provide-Advanced-AIS-services-for-MDAs-Dark-Vessel-Detection-Program
8) ”Government of Canada launches international program to track illegal fishing using satellite technology,” Fisheries and Oceans Canada, News Release, 24 February 2021, URL: https://www.canada.ca/
en/fisheries-oceans/news/2021/02/government-of-canada-launches-international-program-to-track-illegal-fishing-using-satellite-technology.html
9) ”Nine Satellites in exactEarth's Real-Time Constellation Now in Service,” exactEarth, August 29, 2017, URL: http://tinyurl.com/ydg29qdw
10) Laura M. Bradbury, Nathan G. Orr, Maria Short, Niels Roth, Arunas Macikunas, Balaji Kumar, Chris Short, Barbara Ham, Robert E. Zee, ”ExactView-9: Commissioning and on-orbit operation of a high performance AIS nanosatellite,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, URL: http://arc.aiaa.org/doi/book/10.2514/MSPOPS16
11) ”exactView-9 Launched Successfully and Contacted,” UTIAS/SFL, Sept. 28, 2015, URL:
http://utias-sfl.net/?p=2276
12) ”ABSEATM Technology Whitepaper,” SRT Marine Technology, exactEarth,” URL:
http://www.absea-ais.com/wp-content/uploads/2015/03/ABSEA-Whitepaper-27102014.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Payload Ground Segment References Back to Top