EV-1 (ExactView-1 Microsatellite)
EO
Ocean
Operational (nominal)
Spire
Quick facts
Overview
| Mission type | EO |
| Agency | Spire |
| Mission status | Operational (nominal) |
| Launch date | 22 Jul 2012 |
| Measurement domain | Ocean |
| CEOS EO Handbook | See EV-1 (ExactView-1 Microsatellite) summary |
EV-1 (ExactView-1 Microsatellite)
Overview
ExactView-1, formerly known as ADS-1B (AIS Data Services-1B), is part of the COM DEV AIS (Automatic Identification System) constellation of Cambridge, Ontario, Canada - used by ships and traffic to, for example, monitor ship movements through busy shipping channels and harbors and to provide information on global shipping movements. 1) 2)
exactView-1 was built under contract for exactEarth and will become the fifth deployed satellite in exactEarth's advanced vessel monitoring satellite constellation. COM DEV Canada acted as prime contractor and COM DEV Europe(UK) supplied the advanced AIS transceiver payload system for this mission. 3)
exactEarth Ltd. of Cambridge, Ontario, Canada is a data services company providing advanced information on global maritime traffic available today. The company is jointly owned by COM DEV International Ltd. (Cambridge Ontario, El Segundo, CA, USA, Aylesbury, UK) and HISDESAT Servicios Estrategicos S.A. of Madrid, Spain.
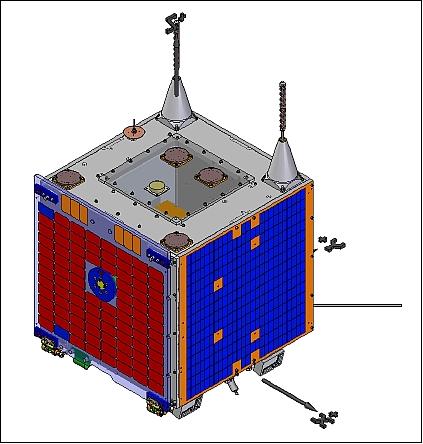
Spacecraft
The exactView-1 spacecraft has been built at SSTL on the SSTL-100 platform (of DMC heritage) with a mass of 100 kg.
Note: A spacecraft description will be provided when available.
RF communications: S-band TM/TC (Telemetry/Telecommand) for satellite operations. The C-band is for the payload downlink (2 polarizations, 4 channels).
COM DEV EUROPE has developed a low-cost and lightweight S-band TT&C transponder (STC-MS01), for LEO (Low Earth Orbit) missions. The design is based on COTS (Commercial Off-The-Shelf) components and targets Earth observation missions with short mission durations of 3-5 years.The TT&C transponder is based on a SDR (Software-Defined–Radio) architecture. This makes the unit very flexible and easily adaptable to new mission requirements. 4)
Launch
The exactView-1 microsatellite was launched as a secondary payload on July 22, 2012 on a Soyuz FG/Fregat vehicle from the Baikonur Cosmodrome, Kazakhstan. The primary payload on this flight was Kanopus-V-N1 of Roskosmos, Russia. 5) 6) 7)
Secondary payloads on this flight are:
• BelKa-2 (Belarusian space apparatus-2), a minisatellite imaging mission of Belarus (NASRB) with a mass of ~ 400 kg
• TET-1 (Technology Experiment Carrier-1), a technology probe of DLR, Germany with a mass of 120 kg
• Zond-PP, a microsatellite of IRE (Institute of Radiotechnology and Electronics), Moscow, Russia for technology demonstrations.
• exactView-1 [ formerly ADS-1B (AIS Data Services-1B)], a communication microsatellite with a mass of 100 kg, [AIS (Automatic Identification System) application] of exactEarth (COM DEV), Canada.
Orbit: Sun-synchronous circular orbit on ascending node, altitude = 810 km, inclination = 98º.
Kanopus-V-N 1, Belka-2 and TET-1 were released into an orbit of ~ 510 km. Afterwards, Fregat had to maneuver to a higher ~800 km orbit to deploy Zond-PP and the exactView-1 payloads. All satellites were successfully deployed and Fregat made a deorbit maneuver.
Mission Status
• On November 27, 2012 exactEarth Ltd. successfully added its latest satellite EV-1 into its commercial service. EV-1 performance has exceeded industry expectations as daily detection rates are consistently reaching 45,000 MMSIs (Maritime Mobile Service Identity numbers) increasing the total exactAIS® Premium global AIS service to approximately 90,000 unique MMSIs a day. 8)
• October 2012: exactEarth Ltd. Has successfully completed the payload performance testing of its latest AIS satellite, EV-1. During the coming weeks, exactEarth will complete the remaining satellite commissioning activities and bring EV-1 into full commercial operation in November, as planned. 9)
• SSTL will continue the commissioning of the satellite in orbit. Once all platform systems are operational, engineers from COM-DEV Canada will work alongside the SSTL ground operations team to commission its highly advanced AIS (Automatic Identification System) payload. 10)
• SSTL has since established communications with the satellite in its of 817 km sun synchronous orbit from SSTL's Guildford mission control center and is receiving telemetry and commanding the spacecraft. Initial system checks have confirmed that critical systems such as power, avionics, telecommand and control are all functioning as expected, and the solar panel has been deployed.
• exactView-1 separated from the Soyuz launch vehicle's Fregat upper stage in low Earth orbit approximately 2 1/2 hours after launch.
Sensor Complement
Automatic Identification System (AIS) payload
EV-1 is carrying an advanced 2nd generation AIS detection payload which is expected to significantly enhance vessel detection and tracking performance especially in areas of denser shipping traffic. The AIS (Automatic Identification System) payload features two polarizations and four channels and a C-band data downlink. 11)
Instrument mass, volume | 1.5 kg, 130 x 232 x 54 mm (excluding filter) |
DC power consumption | < 35 W |
Supply voltage | 28 V ±6 V |
Data/control interfaces | 2 x RS-422, 3 x LVDS, 1 x CAN bus (flexible arrangement) |
Operating temperature range | -20ºC to +60ºC |
Survival temperature range | -35ºC to +80ºC |
Cold start | -20ºC |
C-band transmitter | |
Tx frequency range | 5100 to 5300 MHz |
Output power range | Up to 5 W (+37 dBm) |
Passband | 27.0 MHz (99% power bandwidth) |
EVM (Error Vector Magnitude) | Better than 10% |
Amplitude error, amplitude imbalance | 0.6 dBpp, ±0.2 dB |
Phase error, phase imbalance | ±1.65º, ±2º |
Center frequency stability | ±25 ppm |
TM modulation format(s) | QPSK, OQPSK |
Data rate (max) | 20 Mbit/s |

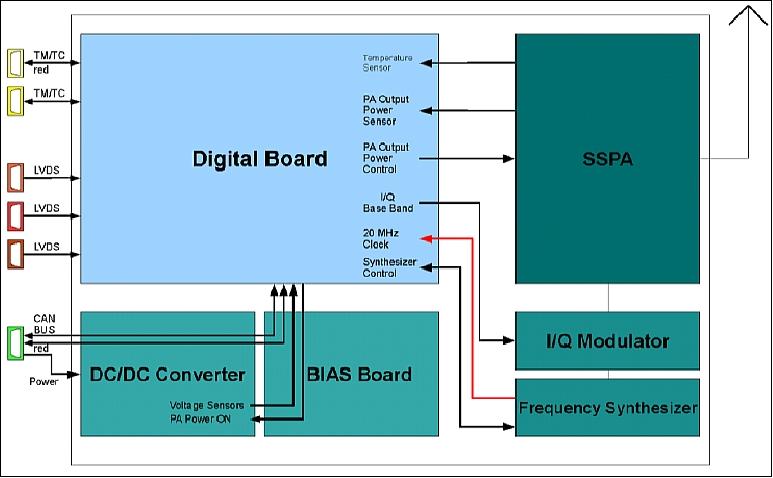
The C-band transmitter consists of a digital board I/Q modulator and frequency synthesizer, a power amplifier and an output filter. Figure 7 shows a simplified block diagram of the equipment.
The digital board is the core of the system. It takes its frequency reference from the 20 MHz clock on the synthesizer board or by default an 80 MHz PLL (Phase Locked Loop) which is locked to the active input data clock and has the following key functionality:
• Takes telemetry and telecommand data from either the CAN or the RS422 bus (prime or redundant)
• Selects one of three LVDS (Low Voltage Differential Signaling) inputs (clock/data/latch) - providing multiple input redundancy and multiple payload support
• Processes the input bit stream to provide suitable I/Q signals to drive the I/Q modulator
• Controls power amplifier ON/OFF via DC-DC converter voltage line
• Measures power amplifier output power and provides power control by a combination of I/Q level control (fine level control) and via a stepped attenuator in the power amplifier chain
• Measures the temperature of the power amplifier output device
• Controls the frequency synthesizer and hence transmitter center frequency.
The I/Q modulator and frequency synthesizer have the following features:
• Generates 20 MHz reference for the digital board
• Generates local oscillator for I/Q modulator
• Applies I/Q signals from the digital board to the I/Q modulator.
The power amplifier has the following key functionality:
• Provides a low-pass filter to remove unwanted I/Q mixing products
• Provides coarse output power control via stepped attenuator
• Provides amplification to the final output power level of 5 W
Digital board design: A block diagram of the digital board is shown in Figure 8. The digital board comprises on five key elements FPGA, dual DAC (Digital to Analog Converter), ADC (Analog to Digital Converter), PLL (Phase Locked Loop) and the CAN bus interface MCU.
FPGA (Field Programmable Gate Array): The FPGA used in the C-band transmitter is a low-power, high-capacity (1 million system gates) reprogrammable flash FPGA. The particular implementation has been derived from COM DEV Europe’s S-band TT&C transponder. The signal path is selected out of three inputs based on clock signal being present (if two are present, the lower input is selected). The input signal progresses through a selectable V35 self-synchronizing scrambler ensuring that the data sequence at the system input always generate an even power spectral density and that there are sufficient bit transitions for clock recovery. It then passes through an NRZ-M encoder (to ensure that there is a phase reference for the receiver) and onto a convolutional coder for forward error correction (to improve signal noise of the signal at the expense of bandwidth) if required. The modulator maps pairs of bits on to a constellation. The data stream is then mapped to QPSK or OQPSK as required and up-sampled. There is allowance for phase and amplitude adjustment of the I and Q signals to optimize the performance of the I/Q modulator.
Commands to the FPGA are either via the CAN bus or via RS-422 inputs (selectable), both of which can be connected to redundant spacecraft buses. There are various sensor inputs for temperature, voltage, power etc. as well as outputs to control synthesizer frequency, power amplifier attenuator setting, DC-DC status etc. The power supply and logic is carefully controlled to ensure that the unit can never output an un-modulated CW carrier that could violate ITU power flux density requirements.
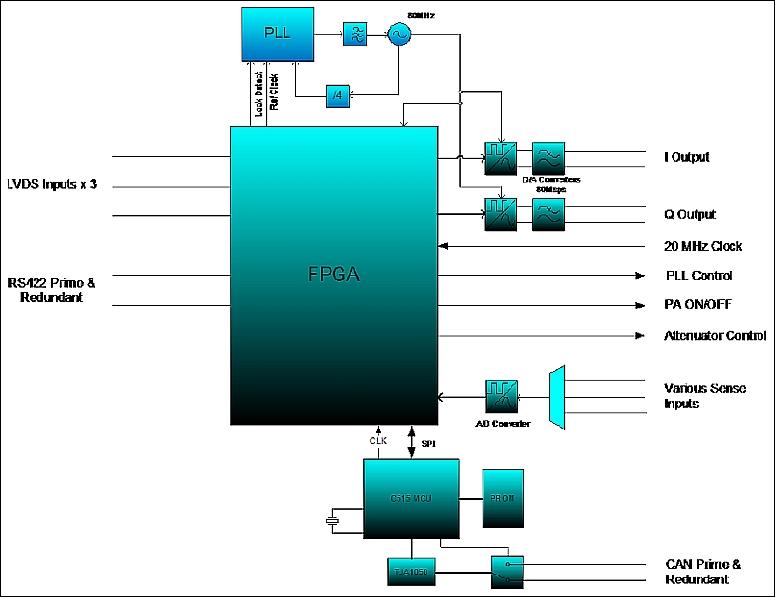
The PLL is locked to the data source clock and provides the system clock to the FPGA. Therefore all the data is synchronously locked to the clock source. The 20 MHz TCXO (from the RF synthesizer board) is a backup data clock i.e. when there is no clock input. The RF frequency synthesizer has its own high stability clock independent of data clock i.e. carrier frequency and stability are independent of the data clock.
The CAN controller is based on parts with considerable flight heritage. The C515 microcontroller allows the interface to be customized to suit mission requirements.
The I/Q modulator and frequency synthesizer board comprises a C-band single loop fractional-N frequency synthesizer which drives the LO port of the integrated vector I & Q modulator, which takes two orthogonal signals, the In-phase (I) and Quadrature (Q) parts, and direct converts them with the local oscillator to the desired output frequency. The two signals are summed and the resulting output is the complex baseband translated to the carrier frequency. The modulator output is followed by a programmable attenuator and a buffer amplifier which sets the output power to the required level thus enabling the SSPA (Solid-State Power Amplifier) back-off to be controlled accurately to our requirements.
Fractional-N synthesizer: The ADF4156 fractional-N frequency synthesizer which has a low phase detector noise floor is used as the PLL synthesizer. Its normalized phase noise is -213 dBc/Hz. The PLL consists of counters, an 8/9 prescaler, DSM (Delta-Sigma Modulator), and a phase detector. The dual-modulus prescaler divides the VCO frequency by either 8 or 9, depending on the value of the modulus select. Counters R and INT divide the reference and prescaler output respectively with an additional counter, FRAC is used in the modulus select logic. Selecting the DSM words MOD and FRAC sets the Fractional-N value. The synthesizer is programmed by a 3-wire serial (SPI) interface.
SSPA: The power amplifier implementation is based on GaN FET devices. COM DEV Europe has previous experience using GaN devices at L-band and the efficiency improvements compared to conventional GaAs technology was marked. To achieve the required gain and power, a three-stage design was implemented.
The line-up has 3 active stages, pre-driver, driver and power stage. The first amplifier stage is a Hittite gain block, which provides a gain of 20 dB, followed by two GaN stages. The driver stage is a 10 W device biased for low power applications. The power stage is a 15 W device modelled for maximum power and drain efficiency. Non-linear models from Cree were used for the non-linear modelling of the design. A low pass filter at the input provides harmonic rejection from the I/Q modulator. A low loss isolator ensures a good output match and reverse power protection. In the complete transmitter system a low-pass filter is used at the output of the power amplifier to ensure sufficient harmonic rejection to meet regulatory requirements.
Item | Voltage (V) | Current (mA) | Power (W) |
Voltage 1 (PA) | 22-28 adjustable | 1000 | 28 @ 28 V worst-case |
Voltage 2 (PA) | -5.5±5% | 10 | 0.055 |
Voltage 3 (Digital) | 5.5±2% | 350 | 1.93 |
Voltage 4 (Modulator) | 5.5±2% | 250 | 1.38 |
Voltage 5 (Digital) | 3.8±2% | 525 | 2 |
Voltage 6 (Modulator) | 3.8±2% | 200 | 0.93 |
Voltage 7 (PA) | 3.5±2% | 475 | 1.66 |
|
| Total | 35.9 |
The DC-DC converter has the following key features:
• Voltage 1 and 7 (Table 2) are enabled by the digital board
• Operational input voltage range 22 to 34 V
• Load regulation ±1% from 40% load to 100% load
• Under voltage cut off
• Survive without damage ±50 V on input terminals
• Output short circuit protection
• Output open circuit protection
• Soft start up typically greater than 1ms/V (reduces EMC)
• Efficiency greater than 85% across load range of 75% to 100%
• Current sensing for voltage 1 and 5 (Table 2)
• Small size for 7 output voltages: 95 mm x 60 mm x 19 mm.
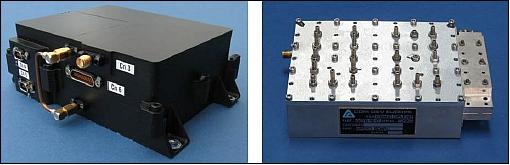
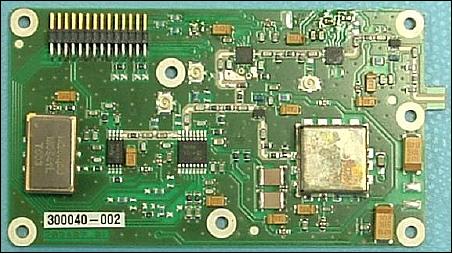
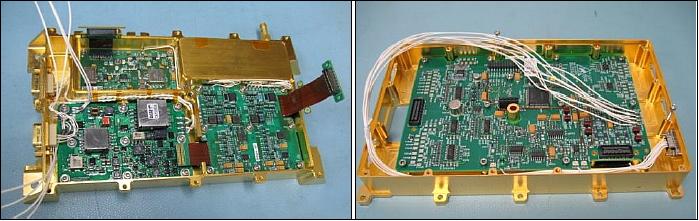
Integration: The unit is integrated as a two-layer stack. The upper layer is the digital board and the lower layer PA (Power Amplifier), DC-DC, I/Q Modulator and Bias Board. Figure 10 shows the lower (left) and upper decks (right), respectively. Interconnections between the layers are via flexi-PCB.
References
1) Elliott Coleshill, “AIS: Technology Development to Commercialization,” NSAW-2010 (National Space Awareness Workshop), Ottawa, Canada, Nov. 19, 2010, URL: http://www.caisu.org/nsaw/2010/presentations/ElliottColeshill.pdf
2) http://www.comdevintl.com/default.aspx?id=244
3) “SSTL announces exactView-1 satellite launch date,” Space Daily, July 9, 2012, URL: http://www.spacedaily.com/reports/SSTL_announces_exactView_1_satellite_launch_date_999.html
4) G. Roeper, R. Goldsmith, I. Hatziathanasiou, C. McLaren, P.Maguire, “Miniature TT&C Module for small satellites in low earth orbits,” 5th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications (TTC 2010), Noordwijk, The Netherlands, Sept. 21-23, 2010, URL: http://www.comdev.ca/.../Miniature%20TT&C%20Module%20
for%20Small%20Satellites%20in%20Low%20Earth%20Orbits.pdf
5) “Soyuz FG Launch Updates - July 2012,” Spaceflight 101, July 22, 2012, URL: http://www.spaceflight101.com/soyuz-fg-launch-updates-kanopus-belka-exactview-zond-tet.html
6) “SSTL announces the successful launch of exactView-1,” SSTL, July 22, 2012, URL: https://www.sstl.co.uk/media-hub/latest-news/2012/sstl-announces-the-successful-launch-of-exactview-1
7) “exactEarth announces successful launch of EV-1 satellite with Advanced AIS detection payload,” exactEarth , July 22, 2012, URL: http://www.exactearth.com/news/2012-07-23/
8) “exactEarth’s Latest Satellite Enters Commercial Service,” exact Earth, Nov. 27, 2012, URL: http://www.exactearth.com/news/2012-11-27/
9) “exactEarth’s latest satellite passes AIS payload performance testing AIS Message Detection Rate sets new standard,” exactEarth, October 17, 2012, URL: http://www.comdev.ca/docs/EV1%20Test%20PRV1%20-%20October%2017%20-%20FINAL%20%282%29.pdf
10) “exactView-1 satellite operational in orbit,” SSTL, July 26, 2012, URL: https://www.sstl.co.uk/media-hub/latest-news/2012/exactview-1-satellite-operational-in-orbit
11) I. Hatziathanasiou, C. McLaren, R. Goldsmith, G. Roeper, “Miniature High Speed Downlink (HSDL) Module for Small Satellites in Low Earth Orbits (LEO),” 5th ESA International Workshop on Tracking, Telemetry and Command Systems for Space Applications (TTC 2010), Noordwijk, The Netherlands, Sept. 21-23, 2010, URL: http://www.comdev.ca/.../Miniature%20High%20Speed%20Down%20Link
%20Module%20for%20Small%2 0Satellites%20in%20Low%20Earth%20Orbits.pdf
12) “C-Band HSDL Transmitter,” Data Sheet, URL: http://www.comdevintl.com/docs/HSDL%20Data%20sheet%20V105.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).