ESTCube-1 & -2 (Estonian Student Satellite-1 & -2)
Non-EO
Atmosphere
Mission complete
Land
Quick facts
Overview
| Mission type | Non-EO |
| Agency | DLR, FMI |
| Mission status | Mission complete |
| Launch date | 07 May 2013 |
| End of life date | 09 Oct 2023 |
| Measurement domain | Atmosphere, Land, Gravity and Magnetic Fields |
| Measurement category | Multi-purpose imagery (land), Atmospheric Winds |
| Instruments | High Resolution Optical Sensor |
ESTCube-1 & -2 (Estonian Student Satellite-1 & -2)
ESTCube-1 & -2 were two Estonian student CubeSat projects of the University of Tartu, which started in the summer of 2008. The objective was to get students involved in space projects. Another goal was to foster the development of Estonian space and high-tech industry by training experts and disseminating knowledge about space technologies. 1) 2) 3)
The projects developed into a full-scale international collaboration with participating students from the University of Tartu, Tallinn University of Technology, and the Estonian Flight Academy. Students from University of Surrey, UK and ISU (International Space University), of Strasbourg, France, also took part in the development of the projects. The payloads were a joint cooperation with the Finnish Meteorological Institute (FMI, which leads payload development) and the German Aerospace Center (DLR).
The main goal of the ESTCube-1 & -2 missions was to perform the first on-orbit test of the E-Sail (Electric Solar Wind Sail) concept, invented by Pekka Janhunen of FMI (Finnish Meteorological Institute). This was a novel propellantless propulsion technology utilizing electrostatic interaction between the fast moving ions in the solar wind and the electric field generated by a spacecraft that allows to partially transfer the momentum of the ions to the spacecraft, effectively producing thrust. This electric field can be generated by a set of electrically charged tethers, effectively forming an electric sail. The test mission involved deployment of a thin electrically conductive tether in LEO (Low Earth Orbit) and charging it to a high voltage to measure the force of interaction between the semi-stationary plasma in Earth's magnetosphere and the satellite itself. 4) 5) 6) 7) 8) 9)
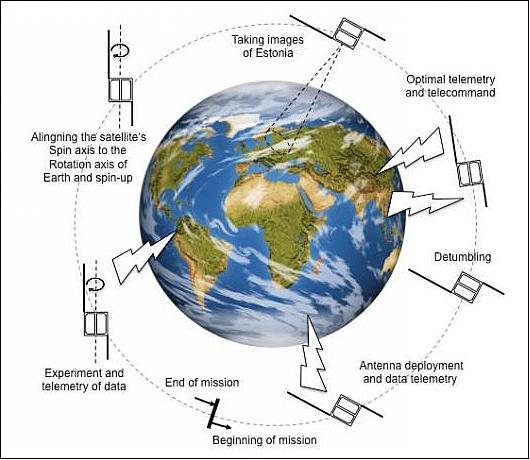
Designed, built and operated by the students of several Estonian universities (Estonian Aviation Academy, Tallinn University of Technology and University of Life Sciences) and led by the University of Tartu with Tartu Observatory, ESTCube-1 & -2 were part of ESA's Plan for Cooperating States agreement with Estonia, a one-year program of activity taking place as a prelude to the country joining ESA as a Member State.
The main objectives of the ESTCube-1 & -2 missions were:
1) Test the deployment of a 10 m tether, which was an integral part of the electric solar wind sail
2) Measure the force being exerted to the sail
3) To take a picture of the tether.
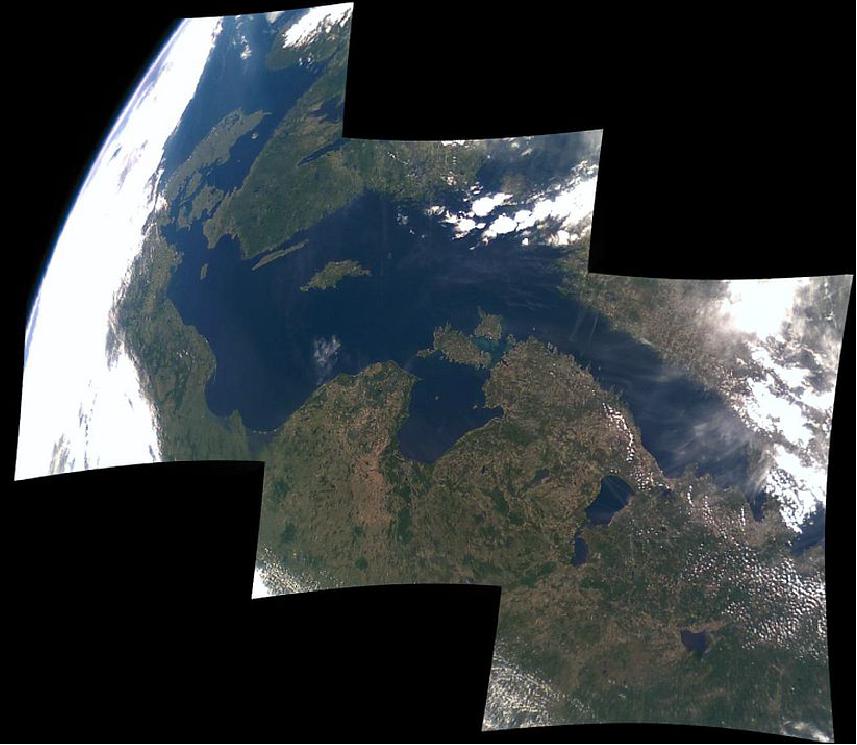
4) As an added mission to take a picture of the Earth and, if possible of Estonia.
Spacecraft
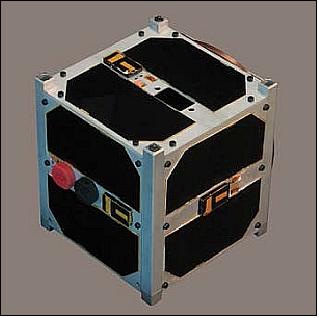
ESTCube-1 & -2 conformed to the standard 1U CubeSat specifications with a side length of 10 cm and a mass of 1.050 kg. COTS (Commercial-off-the-Shelf) components were used for the spacecraft bus, designed by students.
ESTCube-1 & -2 aimed to perform a single axis spin-up using only electromagnetic coils. The spin-up was required to deploy an E-Sail tether by centrifugal force. 10)
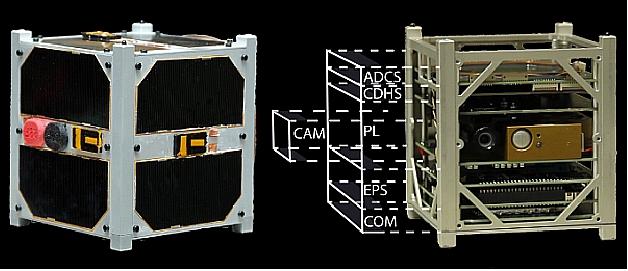
Spacecraft Structure
The mechanical frame of ESTCube-1 & -2 was made from aluminum (alloy AW 6082-T6) as a mono-block structure to a provide more rigid structure with respect to the frame mass. The side panels were manufactured from the same type of aluminum and were 1 mm thick.
ADCS (Attitude Determination and Control Subsystem)
ADCS was responsible for measuring and adjusting satellite's attitude in orbit, including adjustments of rotation speed and rotation axis. This was done using magnetic torquers. The satellite was equipped with sun sensors, magnetometers and gyroscopes. By integrating the sensor reading, the satellite's attitude with respect to Earth and Earth's magnetic field and its speed of rotation could be determined. 11)
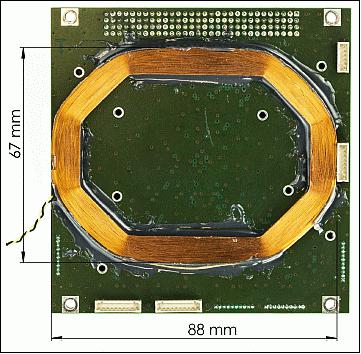
The ADCS could be divided into two subsystems. First, the attitude determination system, which had three-axis Honeywell HMC5883L magnetometers; three-axis Invensense ITG-3200 gyroscopic sensors; and two-axis sun sensors based on two one-dimensional Hamamatsu S3931 position sensitive detectors (PSD), a sun sensor for each side of the satellite. Attitude estimation was performed using an UKF (Unscented Kalman Filter). Second, the attitude control system, which had three electromagnetic coils.
EPS (Electric Power Subsystem)
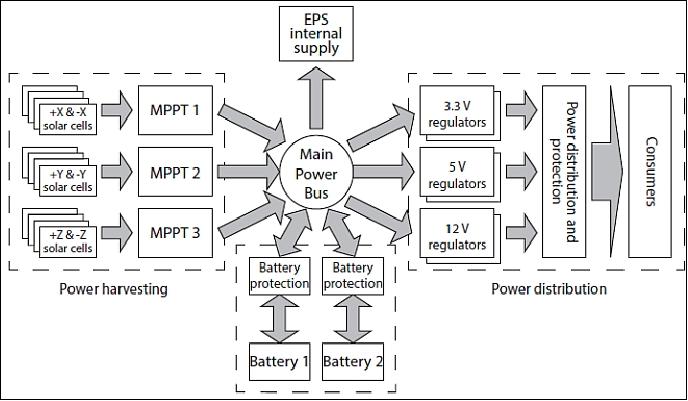
The CubeSats were powered by 12 GaAs triple junction solar cells from Azur Space Solar Power with rated efficiencies of 30 %, which generate between 2.4 to 3.4 W at BOL (Beginning of Life). The solar cells were surface mounted. The EPS consisted of 4 dmajor blocks (Figure 5): energy harvesting, energy distribution, energy storage and control module. All of these systems were connected together using the MPB (Main Power Bus), which transferred energy within the EPS and had a variable voltage between 3.7 and 4.2 V during normal operation dependent on the battery charge state (Ref. 4). 12)
The 12 solar cells were arranged into 3 groups, each containing the solar cells from the opposite sides of the satellite. This allowed to efficiently track the MPP (Maximum Power Point) of the solar cells using three independent controllers. Energy was stored in two Panasonic P-CGR 18650C Li-ion cylindrical battery cells (9 Wh), both of which had their own independent protection circuitry which connected them to the MPB. The energy was distributed to the subsystems through 3 voltage lines (3.3 V, 5 V and 12 V), each of which was powered by two parallel redundant switching regulators. The outputs of the regulators were summed by Schottky diodes to make the system immune to single converter failure.
The EPS was controlled through an ATMega1280 8 bit AVR microcontroller from Atmel. The processor had been tested before and deemed suitable for conditions similar to the current mission.
The EPS was built from ground up using COTS (Commercial-off-the-Shelf) components and utilized some new approaches, such as integrated MPTT (Maximum Power Point Tracking) ICs (Integrated Circuits) and extensive use of FRAM (Ferroelectric Random Access Memory) to augment a COTS AVR microcontroller with highly radiation-resistant memories and to make control systems remember their states even when power is lost. As an extra layer of protection, some key systems, such as the MPPT system and regulators had been duplicated. 13)

CDHS (Command and Data Handling Subsystem)
From a mission-specific perspective, the CDHS on board ESTCube-1 was required to handle data needed for controlling the satellite and for the E-sail experiment. The experiment involved a centrifugal unreeling of a 10 m long conductive tether. Next, a ±500 V potential was generated on the tether to observe its interaction with ionospheric plasma. The observation was carried out indirectly by estimating changes in the satellite spin rate. Estimation was performed using a Kalman filter with readings from magnetometers, MEMS (Microelectromechanical Systems), angular rate sensors, and analog sun sensors. The implementation of the Kalman filter on ESTCube-1 & -2 required the input data measurements to be carried out 2.5 times/s. Furthermore, the CDHS had to (1) store data from the CAM (Camera subsystem) in the form of multiple binary images of up to 600 KB each; (2) store housekeeping data of all subsystems; and (3) compile the beacon and data packets for downlink. 14)
The CDHS contained two STM32F103 ARM processors, one of which was turned on. The two processors gave the possibility to activate the second one if the first was defective, to make sure that the satellite remained operational. The CDHS had three data interface types with other ESTCube-1 & -2 modules: SPI (Serial Peripheral Interface), I2C (Inter-Integrated Circuit), UART (Universal Asynchronous Receiver/Transmitter) which were organized into several logical buses. The FreeRTOS operating system was used to fulfil requirements of real-time operations, processing capacity and memory footprint.
RF Communications
Use of a VHF/UHF system for uplink (1.2 kbit/s) and downlink (9.6 kbit/s) data transmissions. Both uplink and downlink used AX.25 unnumbered information frames as a transport protocol. In addition, a CW beacon was used.
Quarter wave monopoles were used as antennas for both uplink and downlink. A power amplifier on the satellite provided up to 500 mW for data downlink, and a preamplifier provided 18 dB amplification for uplink. The transmit power of the CW beacon was 100 mW. Due to the shared RF chain the beacon and the primary downlink couldn't be transmitted simultaneously. The Texas Instruments MSP430F2418 MCU was used on the COM.
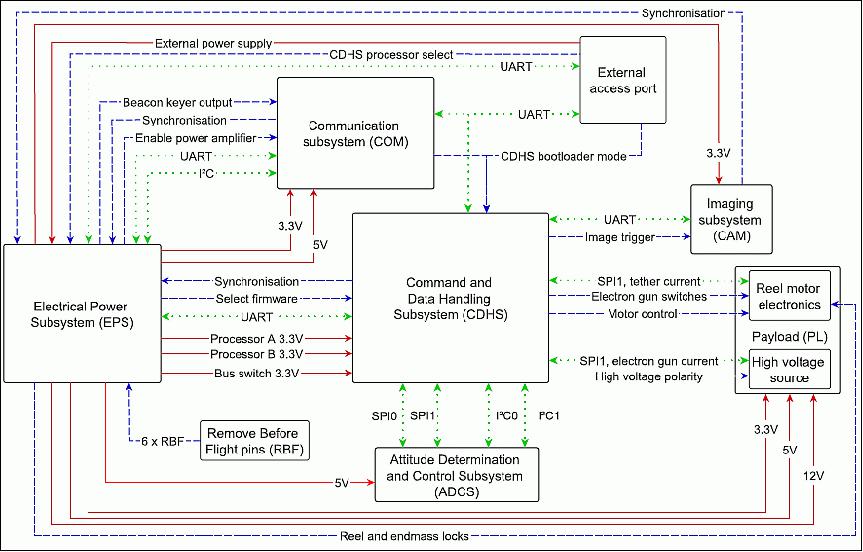
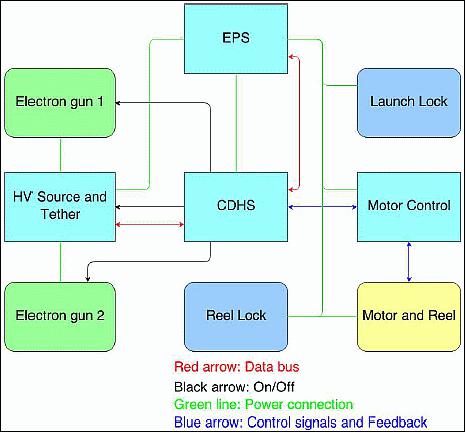
Legend to Figure 8: Arrowheads denote data directions from a source to a target, bidirectional buses are denoted by bidirectional arrows. Solid red lines denote electrical power, dotted green lines donate digital buses and dashed blue lines donate general purpose input or output signals.
Launch
The ESTCube-1 CubeSat was launched as a secondary payload on May 7, 2013. The primary payload on this flight was PROBA-V of ESA. The launch vehicle was Vega (with Arianespace as launch provider); the launch site was the Guiana Space Center, Kourou. 15) 16)
The secondary payloads on this flight were:
• VNREDSat-1A (Vietnam Natural Resources, Environment and Disaster-monitoring Satellite) of STI-VAST (Space Technology Institute-Vietnam Academy of Science and Technology). The microsatellite VNREDSat-1A (120 kg) built by EADS Astrium, Toulouse, France. 17) 18)
• ESTCube-1 (Estonian Student Satellite-1), a 1U CubeSat technology demonstration mission of the University of Tartu.
PROBA-V rode in the upper position of the Vespa adapter, while VNREDSat-1A and ESTCube-1 sat in the lower position in the structure. The upper stage of the Vega vehicle was a liquid propulsion module with multiple re-ignition capability. The secondary payloads were deployed last after re-ignition of the Vega upper stage.
Orbit of PROBA-V: Sun-synchronous orbit, altitude = 820 km, inclination = 98.8º, LTDN (Local Time on Descending Node) = 10:30 hours (with a drift limited between 10:30 and 11:30 AM during the mission lifetime). Note: In contrast to the SPOT-4 and SPOT-5 missions, PROBA-V didn't have the capability to maintain its orbit.
Orbit of VNREDSat-1 and ESTCube-1: Sun-synchronous orbit, altitude =670 km, inclination = 98.5º. VNREDSat-1A was released 1 hour 57 minutes into flight. ESTCube-1 was ejected from its dispenser three minutes later. A last burn was placed the spent upper stage on a trajectory that ensured a safe reentry that complieds with new debris mitigation regulations (Ref. 15).
ESTCube-2 was completed in the first half of 2022 and was launched on 9 October 2023 at 4:36 a.m. EEST, from Kourou, French Guiana, on a shared Vega launch vehicle in October 2023. ESTCube-2 failed to deploy. 38)
Mission Status
• October 9, 2023: ESTCube-2 launched at 4:36 a.m. EEST, aboard the Vega rocket from the European Spaceport in Kourou, French Guiana.
The launch was planned for 5 October 2023, but was delayed. Arianespace confirmed via email to the ESTCube-2 team that the satellite had failed to deploy and likely remained attached to the launch vehicle when it was deorbited and burned up on re-entry. 37)
• On 19 May 2015, the first Estonian satellite, ESTCube-1, stopped operating. After two years and two weeks of successful operation in polar low Earth orbit, the solar panels producing electricity for ESTCube-1 stopped working. Thus the project achieved the objective set for the technical systems of the spacecraft: to create a satellite that would endure the conditions of space for at least two years. 20) 21)
- ESTCube-1 was officially retired on 17 February 2015, as the research program of the mission was completed. Over the last couple of months, the team monitored the endurance of the subsystems of the satellite in the conditions of cosmic environment. The operation of the satellite ended as its solar panels had degraded to the level where the produced electricity was no longer sufficient to recharge batteries and keep the system running.
- "The ESTCube mission can be considered very successful, as thanks to the results of our space cube, we can now say with confidence that in cooperation with international partners, young Estonian specialists are able to contribute to solving one of the largest strategic challenges of humankind: to create technical solutions required for commercial and research operations in the solar system," said Mart Noorma, supervisor of the student satellite project, Associate Professor of the Institute of Physics of the University of Tartu and the Head of Department of Space Technology of Tartu Observatory.
- Noorma added, however, that they did not manage to put the cherry on the cake, as the testing of the components of the electric solar wind sail showed that the system needs substantial improvement: "The electron gun of the electric solar wind sail worked, but unfortunately the most important tether could not be deployed."
- By now, almost 200 students of more than ten nationalities have participated in the project. In addition to the students of the University of Tartu, the project involved students from Tallinn University of Technology, Estonian University of Life Sciences, Estonian Aviation Academy and Tallinn University. In the framework of the Science Special Task Force program of Tartu Observatory, also Estonian senior secondary school students have contributed to the project.
- Some of the technologies created as a result of the project have already been commercialized. Participants in the student satellite program have created five start-ups and published more than 80 research publications or presentations. Almost 50 bachelor's or master's theses on the subject have been defended. The first doctoral thesis fully based on the results of the ESTCube-1 mission will be defended at the University of Tartu at the end of the year.
• The ESTCube mission ended on Feb. 17, 2015. The satellite ended its work as its batteries got exhausted and its mission was completed. 22)
• Tether deployment started on Sept. 16, 2014. The science objective was the deployment of a 10 m tether and to measure the force being exerted by the tether. 23) 24)
- Tether end mass and reel locks burned. Feedback method: power consumption
- Reeling commenced. Feedback method: power consumption and gyros
- Images taken
- No conformation of tether deployment
- Next steps: reverse spin at maximum rate, repeat the reeling procedure.
Overview of ESTCube-1 Mission Statistics (Ref. 23)
- 504 days of successful work in space
- 328 million km travelled
- 4000 communication sessions
- 230 images of the Earth acquired
- 70 public presentations
- 7 keyword search results in WoS
- 9 close approach notifications
- 2 tether deployment tests
• September 2014: The ESTCube-1 CubeSat has been functioning for over 16 months. A problem has been the decrease of solar power production. The lessons learned are: 25)
- More effort has to be put into solar panel assembly, testing and design. Use of a coverglass is recommended, even in case of short missions.
- Temperatures within the satellite varied from -1.5º to 29ºC. The main contributor to these variations is heating during sunlit phase and cooling during eclipse phase of the orbit, as expected, but yearly fluctuations also play a significant role.
- The COTS electronics components seem to be radiation-tolerant enough to sustain such missions as ESTCube-1.
- Analyzing telemetry in timeframe related to the orbital period gives much better insight into the behavior of the system.
• As of May 2014, a schedule for the E-sail tether experiment has not yet been fixed. In short, the project is still dealing with unexpectedly high internal magnetic disturbance and is currently considering and testing different options (Ref. 27).
Once made, the experiment is also expected to provide some useful data for the next mission. In the timeframe 2015, the first Finnish satellite, Aalto-1 will be launched with a 100 m E-sail tether (Ref. 34).
• April 18, 2014: For a while the project had suspicion that there is a strong magnetic disturbance inside the satellite and recent tests have confirmed this. The latest simulations suggest that the disturbing magnetic moment is roughly 1.5 times the maximum output of the coils used for attitude control. Possible sources contributing to the issue are the ferromagnetic bolts holding the stack together and the battery casing. 26)
At this Point there are Three Main Ideas in Consideration
1) Experiment with coil offsets to try to cancel the disturbance during attitude control maneuvers.
2) Try to reproduce and measure the magnetic disturbance on the engineering model in an anechoic chamber
3) If the tests show that the disturbance is caused by a magnetized source, not just ferromagnetic materials condensing the magnetic field lines, then try to demagnetize that source using the coils.
If none of the aforementioned methods manage to solve the issue then, due to the direction of the disturbance, there is also a possibility to change the satellite spin axis so that it coincides with the direction of the disturbing moment while still keeping the tether at 90º to the spin axis. Simulations are being run at the moment to confirm the feasibility of this option for the case if the project actually needs to use it.
Meanwhile, the project has also come up with new ideas for imaging the northern hemisphere, including Estonia, despite the magnetic disturbance and tests are under way to see if these ideas produce the expected results.
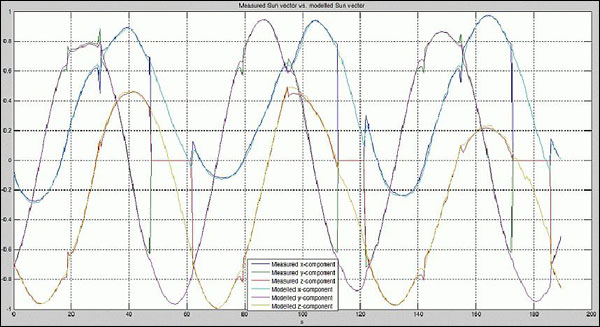
• March 10, 2014: The ESTCube-1 team got the attitude estimation fully-operational in-orbit using the software running on-board the satellite! This is a huge step towards the experiment because the team needs to estimate the attitude on-board in order to spin-up the satellite and to reel the tether out. Currently the team is working on fine-tuning the Kalman filter that is used for attitude estimation and on porting last bits of Matlab code to C that will improve sensor measurement filtering (Ref. 26).
- All attitude controllers have been tested on the ground model and they have been uploaded to the satellite. Only detumbling controller has been tested in-orbit because it does not require attitude estimation. Currently we have encountered some problems with controlling coils but the work is on-going to solve those problems. We want to test detumbling a) to test coils; b) to change angular velocity for gyroscopic sensor calibration; and c) to have it working in case the spin controller fails and leaves the satellite tumbling. We hope that we will be able to use the clear spring sky and the pointing controller to take photos of Estonia in near future.
- The Figure 11, one can see how well measured sun vector follows the modelled sun vector. The attitude is used to transfer the modelled sun vector to the satellite body frame in which the sun vector is measured, hence the graph verifies that the attitude estimation is working.
• The ESTCube-1 satellite is operational as of fall 2013. The project is monitoring and operating the satellite at least 6 times per day during good passes. Most system tests are still ongoing to check long-term performance and stability.
The project is postponing the E-sail experiment to a later date. In this way, the students are able to continue to gather and analyze the data for the preparation of their theses and to publish papers. 27)
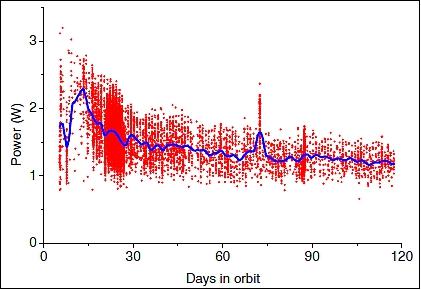
• The amount of energy produced by the solar panels in orbit was logged and the results are shown in Figure 12. Just after deployment power production values that had been estimated before launch were observed (up to 3.2 W). In the beginning of the mission, the satellite produced more power than could be consumed and therefore the trackers did not operate on full capacity for most of the time and the average power production when illuminated staid at around 2.2 W (Ref. 13).
During the first months of operation the solar panels of the satellite showed much larger degradation than expected. During the first month in orbit a gradual drop of solar panel power production was observed. During this process about 45% of solar power production was lost. Later the deterioration slowed. One possible reason is oxygen radical or radiation damage due to lack of cover glass on solar cells, but this kind of damage was not predicted during so short time.
Still, due to the high configurability of the system, an automatic power control algorithm was set in place that monitors the power levels constantly and disables consumers if battery voltage drops below certain level. Doing this stabilized the situation and allowed normal satellite operations to ensue. The only main setback was that the radio beacon period had to be increased and was made dependent on battery voltage level.
• The EPS and the COM have been tested to be able to perform regular operations and the satellite is able to produce and store enough power to perform the E-sail experiment. The CDHS and the ADCS have been verified to be functional. Images of the Earth have been acquired by the CAM and downloaded to the ground continuously since the start of the operations. The EPS, the CDHS and the CAM have been tested to be able to update firmware and software sent from the ground station. 28)
The satellite is in the process of being updated and tested for the experiment. While the subsystems can be thoroughly tested before the experiment, payloads will be verified just before the experiment to minimize the impact of wearing out of critical components. After successfully completing the verification of all subsystems in the near future, the spacecraft will be prepared for the experiment by means of fully charging the batteries and switching the satellite to the experiment mode. During the experiment phase a specific set of telemetry parameters will be logged and EPS will take different measures to ensure availability of energy for the experiment and to account for added risk of using high voltage devices for charging the tether and using electron guns.
• On the basic level, the project verified most systems during the first days.
• After orbit insertion, ESTCube-1 was deployed by the ISIPOD. After separation the satellite was in autonomous boot-up mode for 30 minutes to allow it to clear the launcher. Antennas were then deployed and a radio beacon containing basic telemetry was turned on. The CubeSat transmitted a beacon for 2 days after which two-way communication was established as planned. Since then the subsystems have been verified during the early orbit phase.
Tether Experiment (Payload)
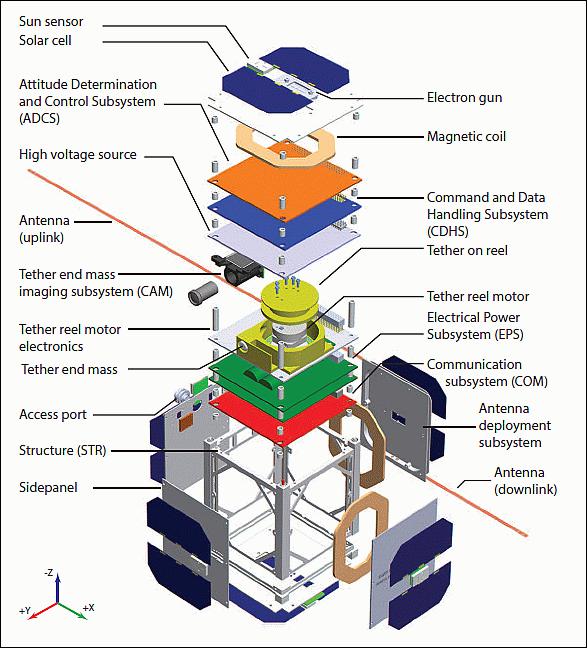
The main mission was testing the electric solar wind sail. For this a small conductive Hoytether (10 m in length) had to be deployed from the CubeSat. Subsequently, the tether was electrically charged to 500 V, using electron guns. Everything needed for that was housed in the payload module. 29) 30) 31)
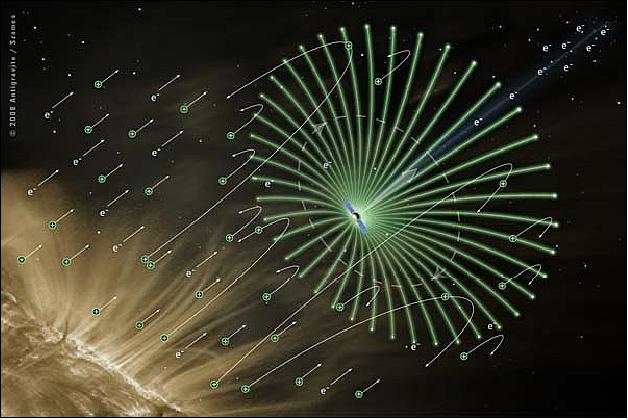
An electric solar sail, or ‘e-sail' bears little resemblance to the more usual sail concepts, shaped like a web-like net. But when electricity was applied through the e-sail, the resulting electrostatic forces repelled charged plasmas found in space – including the Sun's solar wind – to generate momentum. The e-sail technology was developed through the EU's Seventh Framework Program by a partnership of nine institutes across five countries.
E-Sail Principles
The electric sail was a new space propulsion concept which used the solar wind momentum for producing thrust. A full-scale electric sail consists of a number (50-100) of long (e.g., 20 km), thin (e.g., 25 µm) conducting tethers (wires). The spacecraft contained a solar-powered electron gun (typical power a few hundred watt) which was used to keep the spacecraft and the wires in a high (typically 20 kV) positive potential. The electric field of the wires extended a few tens of meters into the surrounding solar wind plasma. Therefore the solar wind ions "see" the wires as rather thick, about 100 m wide obstacles. A technical concept existed for deploying (opening) the wires in a relatively simple way and guiding or "flying" the resulting spacecraft electrically. 32) 33) 34)
The solar wind dynamic pressure varied but was on average about 2 nPa at Earth distance from the Sun. This was about 5000 times weaker than the solar radiation pressure. Due to the very large effective area and very low weight per unit length of a thin metal wire, the electric sail was still efficient, however. A 20 km long electric sail wire weighs only a few hundred grams and fitted on a small reel, but when opened in space and connected to the spacecraft's electron gun, it could produce several km2 effective solar wind sail area which was capable of extracting about 10 mN (milliNewton) force from the solar wind. For example, by equipping a 1000 kg spacecraft with 100 such wires, one could produce an acceleration of about 1 mm/s2. After acting for one year, this acceleration would have produced a significant final speed of 30 km/s. Smaller payloads could be moved quite fast in space using the electric sail, a Pluto flyby could occur in less than five years, for example. Alternatively, one might have chosen to move medium size payloads at ordinary 5-10 km/s speed, but with lowered propulsion costs because the mass that had to be launched from Earth was small of the electric sail.
ESTCube-1 & -2 will unfurled a 10 m long single-strand e-sail to demonstrate its potential as a compact and economical deorbiting method. It measured the resulting force acting on the e-sail as it came into contact with space plasma.
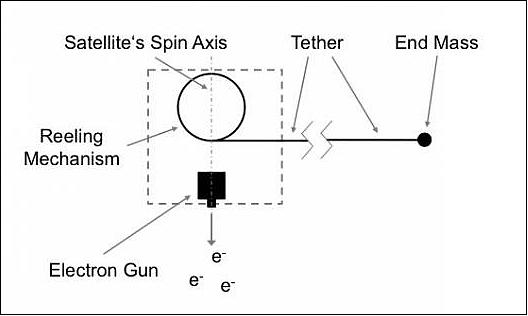
The payload module contained:
• A high voltage circuit for charging the tether to ±500 V.
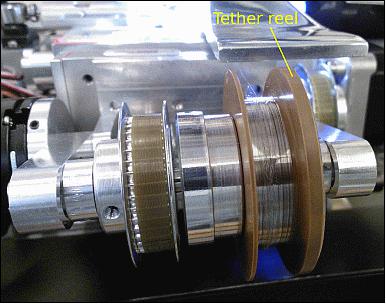
• A reel, on which the tether had been reeled. An aluminum end mass had been attached to the end of the tether and it simplified unreeling of the tether.
• A motor for unreeling the tether.
The camera on the payload module was used to verify the tether deployment and to take an image of Earth.

ESTCube-1 & -2 unfurled a 10 m long single-strand e-sail to show its potential as a compact and economical deorbiting method, measuring the resulting force acting on the e-sail as it camed into contact with space plasma.
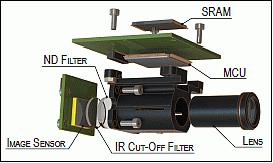
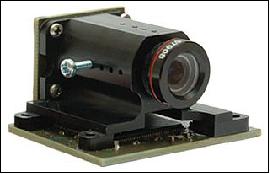
Camera System
A camera system was used for nanosatellite proximity operations. A robust independent camera module with on-board image processing, based on the ARM Cortex-M3 microcontroller and fast static random access memory, had been developed and characterized for the requirements of the ESTCube-1 mission. The imaging system utilizes COTS components and standard interfaces for a cost-effective reusable design. The resulting 43.3 mm x 22 mm x 44.2 mm (W x H x D) aluminum camera module had a mass of 30 g and consumed on the average of 118 mW of power, with peaks of 280 mW during image capture. 35)
An external 2 MB SRAM (Static Random Access Memory) module was used. The microcontroller featured a digital camera interface (DCMI), direct memory access (DMA), and a FSMC (Flexible Static Memory Controller), which in combination allowed for image transfer at a pixel clock of 13 MHz directly to the external memory without a need for additional hardware buffers.
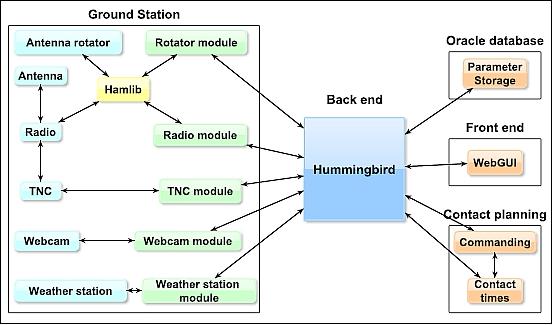
Ground Segment
The ground segment for ESTCube-1 & -2 consisted of a radio station designed for 2 m (VHF) and 70 cm (UHF) amateur radio bands and of an open-source ground segment software based on Hummingbird, which was configured to ESTCube-1 & -2 specific mission needs.
The satellite communication ground station was located in Tartu, Estonia (WGS84 coordinates 58.37345 N, 26.72656 E). It consisted of four Wimo WX7036 70 cm band cross-yagi antennas yielding amplification of 22 dBi and two Wimo WX214 2 m band cross-yagi antennas, all mounted on fiberglass poles. Signals from all the same band antennas were added by using custom-made power dividers. The antennas were pointed using a Yaesu 5500 antenna rotator which was controlled by a custom made rotator controller.
For satellite communication, signals were preamplified on masts next to antennas to compensate for transmission line losses. UHF (Ultra-high Frequency) signals were filtered to remove interference generated by nearby telecommunication stations and amplified to further improve signal-to-noise ratio. A transceiver Icom IC-910H was used to receive the satellite signal, the AX.25 data packets were decoded by a Kantronics 9612+ Terminal Node Controller. A custom-made FSK transmitter and Tokyo Highpower HL300 power amplifier were used to send commands to the satellite. Typical output power of the ground station was 200 W. SDR (Software Defined Radio) FUNcube Dongle Pro+ and USRP N210 were used for real-time radio spectrum monitoring. SDR and a GNU Radio (software toolkit) signal processing chain could be used for satellite reception as well.
References
1) "Estonian Student Satellite," URL: https://sites.google.com/a/estcube.eu/estonian-student-satellite-program/
2) Jouni Envall, "ESTCube Mission— Testing the Electric Sail with the First Estonian Satellite," URL: http://www.kaukokartoituskerho.fi/sites/default/files/Envall.pdf
3) Urmas Kvell and the EstCube team, "Estonian Student Satellite Program ESTCube-1," Proceedings of the 2010 CubeSat Developers' Workshop, Cal Poly, San Luis Obispo, CA, USA, April 21-23, 2010, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2010/Spring/Day%203/1340%20-%20Kvell%20-%20ESTCube-1.pdf
4) Mihkel Pajusalu, Erik Ilbis, Jaanus Kalde, Henri Lillmaa, Risto Reinumägi, Ramon Rantsus, Martynas Pelakauskas, Ahto Leitu, Viljo Allik, Mart Noorma, Silver Lätt, Jouni Envall, "Electrical power system for ESTCube-1: a fault-tolerant COTS solution," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-C3.4.5
5) "Electric Solar Wind Sail (E-sail)," URL: http://www.electric-sailing.com/
6) P. Janhunen, A. Sandroos, "Simulation study of solar wind push on a charged wire: basis of solar wind electric sail propulsion," Annales Geophysicae, Vol. 25, pp. 755–767, March 2007, URL: http://www.electric-sailing.fi/paper2.pdf
7) Mart Noorma, "ESTCube-1: Stepping Stone for Fast Interplanetary Travel," First Interplanetary CubeSat Workshop, MIT, Cambride, MA, USA, May 30, 2012, URL: http://icubesat.files.wordpress.com/2012/06/icubesat-org-2012-c-1-3-_presentation_noorma_201205301151.pdf
8) Silver Lätt, Andris Slavinskis, Erik Ilbis, Urmas Kvell, Kaupo Voormansik, Erik Kulu, Mihkel Pajusalu, Henri Kuuste, Indrek Sünter, Tõnis Eenmäe, Kaspars Laizãns, Karlis Zalıte, Riho Vendt, Johannes Piepenbrock, Ilmar Ansko, Ahto Leitu, Andres Vahter, Ants Agu, Elo Eilonen, Endel Soolo, Hendrik Ehrpais, Henri Lillmaa, Ivar Mahhonin, Jaak Mõttus, Jaan Viru, Jaanus Kalde, Jana Subitidze, Jãnis Mucenieks, Jãnis Sate, Johan Kütt, Juris Polevskis, Jürgen Laks, Kadi Kivistik, Kadri-Liis Kusmin, Kalle-Gustav Kruus, Karl Tarbe, Katrin Tuude, Katrına Kalnina, Laur Joost, Marko Lõoke, Markus Järve, Mart Vellak, Martin Neerot, Martin Valgur, Martynas Pelakauskas, Matis Averin, Mats Mikkor, Mihkel Veske, Ott Scheler, Paul Liias, Priit Laes, Ramon Rantsus, Reimo Soosaar, Risto Reinumägi, Robert Valner, Siim Kurvits, Sven-Erik Mändmaa, Taavi Ilves, Tanel Peet, Tavo Ani, Teet Tilk, Timothy Henry Charles Tamm, Tobias Scheffler, Toomas Vahter, Tõnis Uiboupin, Veigo Evard, Andreas Sisask, Lauri Kimmel, Olaf Krömer, Roland Rosta, Pekka Janhunen, Jouni Envall, Petri Toivanen, Timo Rauhala, Henri Seppänen, Jukka Ukkonen, Edward Haeggström, Risto Kurppa, Taneli Kalvas, Olli Tarvainen, Janne Kauppinen, Antti Nuottajärvi, Hannu Koivisto, Sergiy Kiprich, Alexander Obraztsov, Viljo Allik, Anu Reinart, Mart Noorma, "ESTCube-1 nanosatellite for electric solar wind sail in-orbit technology demonstration," Proceedings of the Estonian Academy of Sciences, Vol. 31, Issue 2S, pp.200-209, April 28, 2014, URL: http://www.kirj.ee/public/proceedings_pdf/2014/issue_2S/Proc-2014-2S-200-209.pdf
9) "Proceedings of the Estonian Academy of Sciences," Vol. 31, Issue 2S, 2014, URL: http://www.kirj.ee/23802/
10) Andris Slavinskis, Urmas Kvell, Erik Kulu, Tobias Scheffler, Silver Lätt, Mart Noorma, "Magnetic attitude control algorithms for ESTCube-1," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B4.5.12
11) Andris Slavinskis, Erik Kulu, Jaan Viru, Robert Valner, Hendrik Ehrpais, Tõnis Uiboupin, Markus Järve, Endel Soolo, Jouni Envall, Tobias Scheffler, Indrek Sünter, Henri Kuuste, Urmas Kvell, Jaanus Kalde, Kaspars Laizans, Erik Ilbis, Tõnis Eenmäe, Riho Vendt, Kaupo Voormansik, Ilmar Ansko, Viljo Allik, Silver Lätt, Mart Noorma, "Attitude determination and control for centrifugal tether deployment on the ESTCube-1 nanosatellite," Proceedings of the Estonian Academy of Sciences, Vol. 63, Issue 2S, pp: 242–249, 2014, URL: http://www.kirj.ee/public/proceedings_pdf/2014/issue_2S/Proc-2014-2S-242-249.pdf
12) M. Pajusalu, R. Rantsus, M. Pelakauskas, A. Leitu, J. Kalde, E. Ilbis, H. Lillmaa, R. Reinumägi, V. Allik, M. Noorma, S. Lätt, "Design of the Electrical Power System for the ESTCube-1 Satellite,"Latvian Journal of Physics and Technical Sciences, Vol. 49, issue 3, 2012, pp: 16-24, URL: http://venta.lv/wp-content/uploads/M-Pajusalu_Designing-the-electrical-power-system-for-estcube-1.pdf
13) Mihkel Pajusalu, Erik Ilbis, Taavi Ilves, Henri Lillmaa, Mihkel Veske, Jaanus Kalde, Risto Reinumägi, Ramon Rantsus, Martynas Pelakauskas, Ahto Leitu, Viljo Allik, Jouni Envall, Mart Noorma, Silver Lätt, "Analysis of the Electrical Power System for ESTCube-1," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-C3.4.9
14) Kaspars Laizans, Indrek Sünter, Karlis Zalite, Henri Kuuste, Martin Valgur, Karl Tarbe, Viljo Allik, Georgi Olentšenko, Priit Laes, Silver Lätt, Mart Noorma, "Design of the fault tolerant command and data handling subsystem for ESTCube-1," Proceedings of the Estonian Academy of Sciences, Vol. 31, Issue 2S, pp.222-231, April 28, 2014, URL: http://www.kirj.ee/public/proceedings_pdf/2014/issue_2S/Proc-2014-2S-222-231.pdf
15) "ESA's Vega launcher scores new success with PROBA-V," ESA press release No 12-2013, May 7, 2013, URL: http://www.esa.int/For_Media/Press_Releases/ESA_s_Vega_launcher_scores_new
_success_with_Proba-V
16) "Estonia's student cubesat satellite is ready for the next Vega launch," Arianespace, March 20, 2013, URL: http://www.arianespace.com/news-mission-update/2013/1026.asp
17) Stephen Clark, "Vietnamese satellite booked for second Vega launch," Spaceflight Now, January 4, 2013, URL: http://www.spaceflightnow.com/news/n1301/04vnredsat1a/#.UOwGWpGQk9Y
18) "Arianespace to launch VNREDSat-1A built by Astrium for Vietnam," Space Travel, January 08,2013, URL: http://www.space-travel.com/reports/Arianespace_to_launch_VNREDSat_1A_built_by_Astrium
_for_Vietnam_999.html
19) http://www.estcube.eu/en/mission/mission-phases
20) "First Estonian student satellite ESTCube-1 stopped operation," University of Tartu, May 20, 2015, URL: http://www.lote.ut.ee/en/news/first-estonian-student-satellite-estcube-1-stopped-operation
21) Vladislav-Veniamin Pustõnski, "ESTCube-1 ceased working after 2 years in orbit," Estonian Space Office, May 31, 2015, URL: http://www.eas.ee/kosmos/en/estonian-space-office/news/article/389-estcube-1-ceased-working
22) "ESTCube-1 sends its last words: "Long live Estonia!"," The Baltic Course, Feb. 17, 2015, URL: http://www.baltic-course.com/eng/Technology/?doc=102574
23) Mart Noorma and ESTCube-1 team, "ESTCube-1 mission results: Status on September 23, 2014," Tartu Conference on Space Science and Technology, Tartu, Estonia, Sept. 22-24, 2014 [web source no longer available]
24) P. Liias, E. Kulu, M. Eerme, P. Orusalu, M. Noorma, "Lessons learned from developing and producing structure and mechanical systems for ESTCube-1," 6th European CubeSat Symposium, Estavayer-le-Lac, Switzerland, October 14-16, 2014
25) Mihkel Pajusalu, Erik Ilbis, Taavi Ilves, Riho Raabe, Mihkel Veske, Mart Noorma, Silver Lätt, "Electrical Power System for ESTCube-1 nanosatellite: lessons learned from in-orbit operations," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-C3.4.5
26) "Progress on ESTCube-1 experiment," ESTCube forum, URL: http://confluence.tudengisatelliit.ut.ee:8080/viewtopic.php?f=6&t=3&sid=9cce3ce88159b495e90b4e9deabd5936
27) Information provided by Erik Kulu of the University of Tartu, Tartu, Estonia.
28) Erik Kulu, Andris Slavinskis, Urmas Kvell, Mihkel Pajusalu, Henri Kuuste, Indrek Sünter, Erik Ilbis, Tõnis Eenmäe, Kaspars Laizäns, Andres Vahter, Elo Eilonen, Jaanus Kalde, Paul Liias, Andreas Sisask, Lauri Kimmel, Viljo Allik, Silver Lätt, Mart Noorma, "ESTCube-1 nanosatellite for electric solar wind sail technology demonstration in low Earth orbit," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.2.10
29) http://www.estcube.eu/en/satellite/pl
30) Pekka Janhunen, "ESAIL: Electric SAIL propulsion technology," Rome, Italy, Sept. 16, 2014 [web source no longer available]
31) Pekka Janhunen, Petri Toivanen, Jouni Envall, Jouni Polkko, Sini Merikallio, Henri Seppänen, Pekka Salminen, Edward Haeggström, Timo Rauhala, Jukka Ukkonen, Göran Maconi, Sergiy Kiprich, Hannu Koivisto, Olli Tarvainen, Taneli Kalvas, Alexander Obraztsov, Greger Thornell, Sven Wagner, Johan Sundqvist, Tor-Arne Grönland, Håkan Johansson, Kristoffer Palmer, Emil Vinterhav, Roland Rosta, Tim van Zöst, Mart Noorma, Viljo Allik, Silver Lätt, Urmas Kvell, Giovanni Mengali, Alessandro Quarta, Generoso Aliasi, Salvo Marcuccio, Pierpaolo Pergola, Nicola Giusti, Giuditta Montesanti, Edoardo Bemporad, Jose Gonzalez del Amo, Eduard Bosch-Borras, "Space exploration with electric solar wind sail," Tartu Conference on Space Science and Technology, 22-24 September, 2014, Tartu, Estonia [web source no longer available]
32) Petri Toivanen, Pekka Janhunen, Jouni Envall, Sini Merikallio, "Electric solar wind sail control and navigation," First IAA Conference on Dynamics and Control of Space, Porto, Portugal, March 19-21, 2012,Vol. 145, Advances in the Astronautical Sciences, paper: IAA-AAS-DyCoSS1-03-10, URL: http://openconf.astrodynamics.org.pt/modules/request.php?module=oc_program&action=view.php&a=&id=192&type=3
33) http://electric-sailing.fi/
34) Jouni Envall, Pekka Janhunen, Petri Toivanen, Mihkel Pajusalu, Erik Ilbis, Jaanus Kalde, Matis Averin, Henri Kuuste, Kaspars Laizans, Viljo Allik, Timo Rauhalad, Henri Seppänen, Sergiy Kiprich, Jukka Ukkonen, Edward Haeggström, Taneli Kalvas, Olli Tarvainen, Janne Kauppinen, Antti Nuottajärvi, Hannu Koivisto, "E-sail test payload of ESTCube-1 nanosatellite," Proceedings of the Estonian Academy of Sciences, Vol. 63, Issue 2S, pp. 210-221, April 28, 2014, URL: http://www.kirj.ee/public/proceedings_pdf/2014/issue_2S/Proc-2014-2S-210-221.pdf
35) Henri Kuuste, Tõnis Eenmäe, Viljo Allik, Ants Agu, Riho Vendt, Ilmar Ansko, Kaspars Laizans, Indrek Sünter, Silver Lätt, Mart Noorma, "Imaging system for nanosatellite proximity operations," Proceedings of the Estonian Academy of Sciences, Vol. 63, Issue 2S, pp. 250–257, 2014, URL: http://www.kirj.ee/public/proceedings_pdf/2014/issue_2S/Proc-2014-2S-250-257.pdf
36) A. Slavinskis, H. Kuuste, H. Ehrpais, I. Sünter,J. Viru, J. Kütt, E. Kulu, M. Noorma, "ESTCube-1 attitude determination and camera flight results," Tartu Conference on Space Science and Technology, Tartu, Estonia, Sept. 22-24, 2014 [web source no longer available]
37) Wikipedia, “ESTCube-2”, URL: https://en.wikipedia.org/wiki/ESTCube-2
38) Gunter’s Space Page, “ESTCube 2”, URL: https://space.skyrocket.de/doc_sdat/estcube-2.htm
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).