EO
ESA
Atmosphere
Ocean
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 03 Dec 2018 |
| End of life date | 04 Dec 2020 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land) |
ESEO (European Student Earth Orbiter)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
Overview
ESEO is the third mission within ESA's Education Satellite Program and builds upon the experience gained with SSETI (Student Space Exploration and Technology Initiative) Express (launched into LEO on Oct. 27, 2005) and the YES-2 tether and reentry capsule experiment (launch on Foton-M3 on Sept. 14, 2007). 1) 2) 3)
ESEO is a microsatellite mission in LEO (Low Earth Orbit). The overall mission objectives are to:
• Take imagery of Earth's surface and/or other celestial bodies for educational outreach purposes
• Measure the radiation environment in Earth orbit
• Test technologies for future educational satellite missions.
The capability to ensure more global radio coverage for the satellite's operation will be achieved through cooperation with AMSAT, the Radio Amateurs Satellite organization, which has already cooperated with a few ESA missions in the past.
ESEO project history
In early December 2008, ESA awarded a contract to CGS (Carlo Gavazzi Space) of Milan, Italy for the development ESEO spacecraft. CGS will lead a network of 12 universities and associations from various countries (France, Germany, Hungary, Italy, New Zealand, Poland, Portugal, Spain, UK) and will coordinate students work to design, build, test and launch the satellite. 4) 5) 6)
The first workshop of the B2 development phase of ESEO took place December 15-19, 2008 at ESA/ESTEC. The theme of the workshop involved in particular the ESEO spacecraft reconfiguration activity led by CGS. The workshop was also supported by AMSAT, an international group of amateur radio operators that is participating in ESEO by providing some of the satellite communication functions. 7)
After about 1.5 years, the ESEO project passed the PDR (Preliminary Design Requirements), ending the involvement of CGS for the ESEO project. During the preliminary design phase, known as Phase B, ESEO involved more than 200 students from 13 universities across Europe. At the end of this phase, the project was re-oriented to fit into a smaller spacecraft and a new invitation to tender was released to European companies to provide and test the ESEO satellite (Ref. 9).
A new open ITT (Invitation To Tender) was issued by ESA in early 2012 which resulted in a contract award for ALMASpace S.r.l. following ESA's tender evaluation. ALMASpace S.r.l. is a spin-off company from the Microsatellites and Space Micro systems Lab of the University of Bologna, Italy. ALMASpace was selected as the new system prime and a network of Universities participating in the project. 8) 9) 10) 11) 12)
The University of Bologna, in particular, has a critical role being the coordinator of the University Network and taking care of all educational activities (Lecture Courses, Training Courses and Internships) for students belonging the partner Universities and participating to the preparation of the payloads. ALMASpace and UniBO have now full responsibility of the spacecraft bus, and this is a significant change with respect to the previous phase of the ESEO project (under CGS guidance). 13) 14) 15)
ESA's plans for this project were changed since the last project phase. It was realized that an organization where every single spacecraft subsystem was entirely designed, assembled, verified by a University team and then delivered to an industrial Prime Contractor, was probably too complex to be managed successfully, without increasing the costs and the development time.
In the new ESEO phase, the project philosophy is slightly changed in that the System Prime shall make use an existing microsatellite platform fitting ESA requirements in order to minimize the risk of a large effort being devoted to the design and harmonization of the spacecraft subsystems. On the contrary, the idea is now to maximize the participation of students belonging to the ESEO University Network to the AIV (Assembly, Integration and Verification) activities at subsystems and system level, plus participating to the spacecraft operations in orbit. While the subsystems will not be necessarily designed by students, by taking advantage of a pre-existing microsatellite platform design, the payloads are to be developed, qualified and provided by universities and their student teams. This approach still allows a direct participation of students to the design, procurement, assembly, qualification of a physical piece of hardware, but minimizes the risk that potential failures or delays in the completion of a single payload could jeopardize the entire spacecraft development plan and, potentially, its launch and operations in orbit.
The consortium assembled by ALMASpace brings together all necessary know‐how and expertise in the field of microsystems design, development and manufacturing. ALMASpace will act as prime contractor and be responsible for:
• Managing the project and, in particular, the formal interfaces to ESA/ESTEC
• Payload selection, qualification and integration onboard the spacecraft and mission implementation management.
The University of Bologna, apart from being involved in the spacecraft design and assembly, is responsible for the educational activities and the University Network coordination. The other universities belonging to the ESEO network are responsible for the scientific and technological payloads hosted onboard, the ground segment, and other support activities to the mission preparation. The overall consortium organization and the interfaces with ESA/ESTEC are shown in Figure 1.
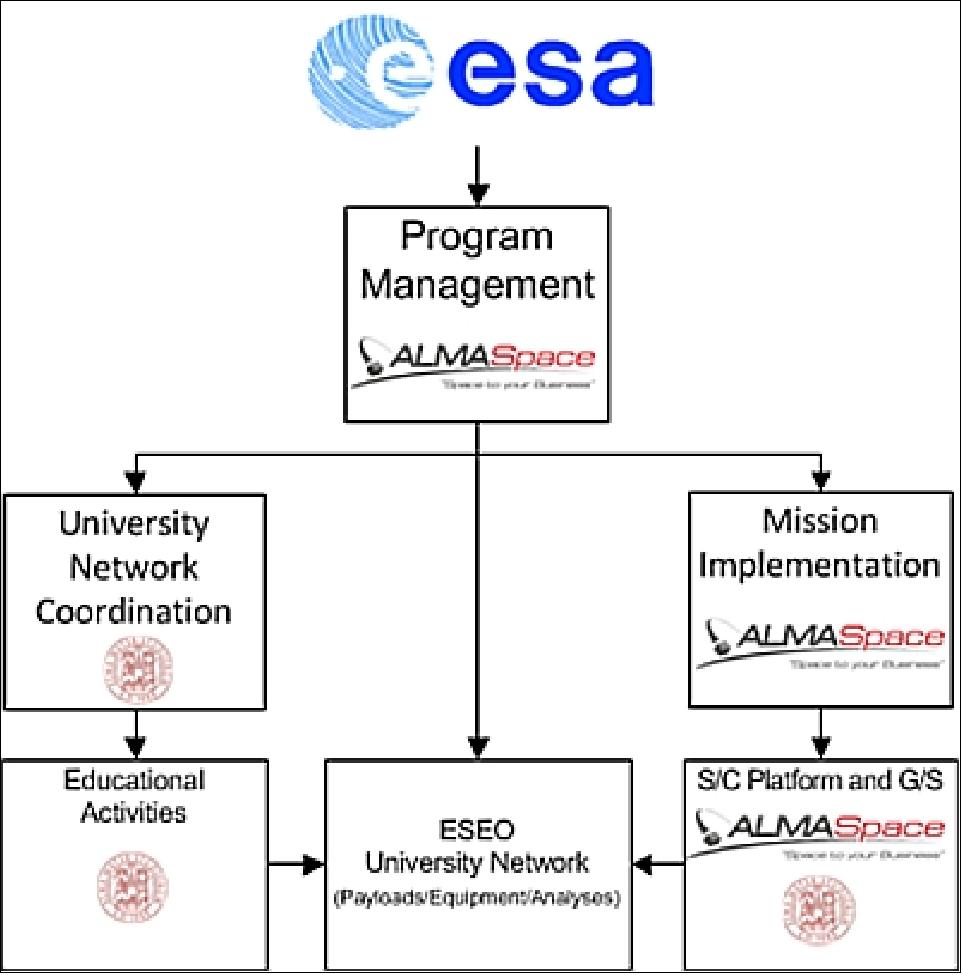
Eight European universities are now working with ALMASpace on the ESEO mission. Their contributions to the mission are shown in Figure 2.

Educational approach
Educational activities play an important role in the ESEO project involving more than 60 students selected from the University Network. Student training allows the participants to gain both theoretical knowledge and practical experience in the field of space system design, and integration. The plan of student training includes the following three segments:
1) Lecture Course
2) Training Course
3) Student Internships.
Three cycles of student training are foreseen starting after about six months from kick-off, where the first group of 20 students attends the Lecture Course (2 weeks) and the Training Course (1 week). Then, students will participate, in small groups of 5 students each, in the Student Internship at ALMASpace facilities (4 weeks). Once the 4 groups of five students have completed the Internship, the second cycle and the third cycle of Student Training will start at month 13 and month 20, respectively. A total of 18 credits, according to the ECTS European Credit Transfer and accumulation System), are granted by the University of Bologna for the three segments of the Student Training (Ref. 10).
In October 2013, after the successful completion of Preliminary Design Consolidation Review (PDCR), the ESEO (European Student Earth Orbiter) program moved to Phase C1, with the objective of entering in the process of the CDR (Critical Design Review) during the Summer 2014.
Spacecraft
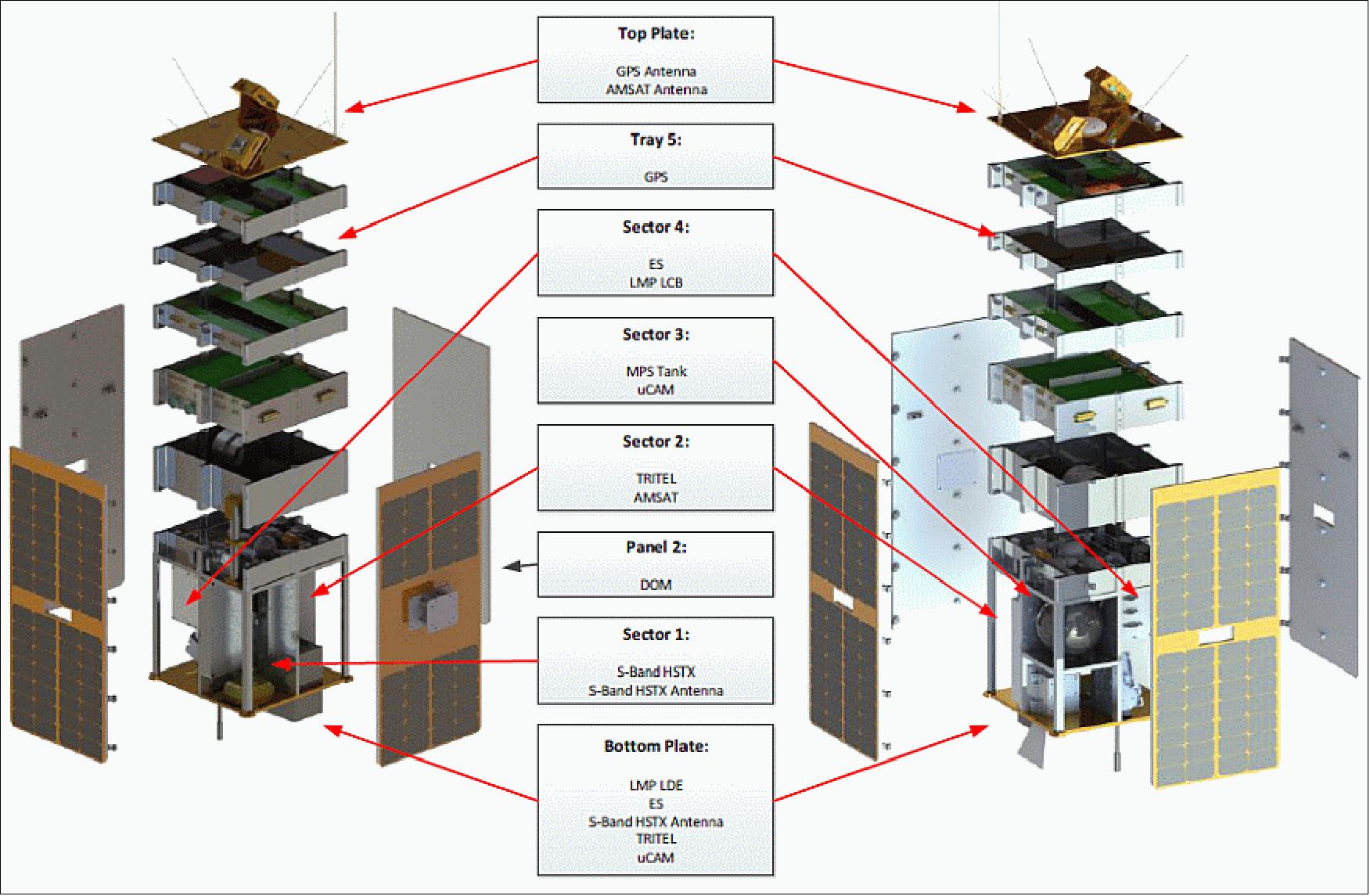
The ESEO spacecraft is a microsatellite with an allocated mass of ~45 kg and a size of 33 cm x 33 xm x 63 cm. The ESEO platform architecture is based on both ALMASat-1 heritage (launch Feb. 13, 2012) and ALMASat-EO . Two modules, namely the bus module and the payload module, contain all the subsystems and payloads. In particular, based on the heritage of past missions, most of the subsystems and their units are arranged inside aluminum trays in order to provide physical separation and flexibility. The main bus is physically separated from the payloads and integration can be performed separately. In order to increase the overall reliability level, redundancy is implemented for most subsystems and units. The composite payload module is installed under the bus module and contains most of the payloads.
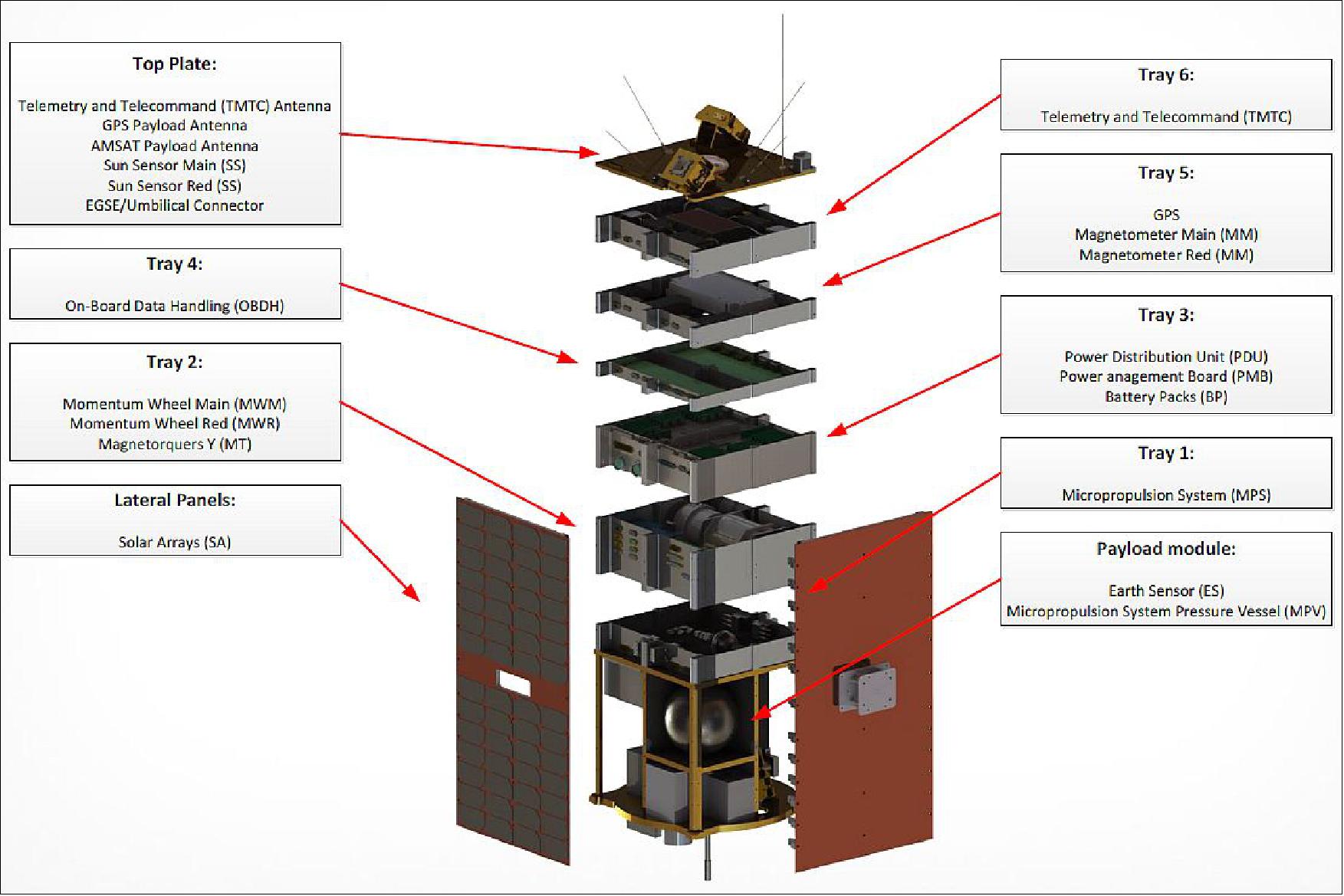
The ESEO platform layout is represented in Figure 5. The composite payload module, containing most of the payloads, has been inherited from ALMASat-EO and the payload arrangement is based on the following constraints: volume and mass, payloads performance and functional requirements, environment, stay-out zones and instrument FOV, accessibility during ground operations.
Most of the subsystems and their equipment are installed inside aluminum trays in order to provide physical separation, flexibility and reduced MAIT (Manufacturing Assembly, Integration and Test) effort. Once stacked, the trays compose a solid cubic structure similar to the design solution that was adopted for ALMASat-1. This ensures that the main bus is physically separated from the payloads, and the system integration can be performed separately for subsystems and payloads. In order to increase the overall system reliability, redundancy is implemented for most subsystems and units. The composite payload module is installed under the bus module and it contains most of the payloads.
AOCS (Attitude and Orbit Control Subsystem)
The spacecraft is 3-axis stabilized. Attitude information is provided by 2an assembly of 2 redundant sun sensors, 2 redundant 3-axes magnetometers and an Earth horizon sensor. A set of 3 orthogonal gyroscopes are included to provide an accurate estimation of the spacecraft angular velocities. The actuator system features 3 redundant orthogonal magnetic coils for attitude acquisition maneuvers and coarse attitude pointing. An assembly of 4 redundant momentum-biased/reaction wheels is used for fine pointing. Both the magnetic coils and the momentum/reaction wheels have been designed and developed by ALMASpace. In addition, a MPS (Micropropulsion System) is provided to provide orbital control and small orbital maneuvers. - Communication between all elements of the AOCS is performed by a CAN bus with a CANopen protocol.
An attitude determination quaternion filter experiment has been designed and developed by students of the Technical University of Delft. It uses sensor and control signal outputs to perform several spacecraft attitude tests in LEO (Low Earth Orbit). Four algorithms from different families of estimators are run in parallel and generate telemetry for further analysis and comparison. One of the four algorithms makes use of a maximum information rate filter which computes the information rates of six possible reduced measurement matrices. It selects one for use in the estimation process based on the maximum trace of the associated information rate matrix. The payload shall provide probability distributions for the selection of each different measurement matrix within the telemetry in order to determine the causality underlying the selection of a particular reduced measurement matrix based on features of the orbit and the used measurements. The software experiment will be loaded onto the OBDH. 16)
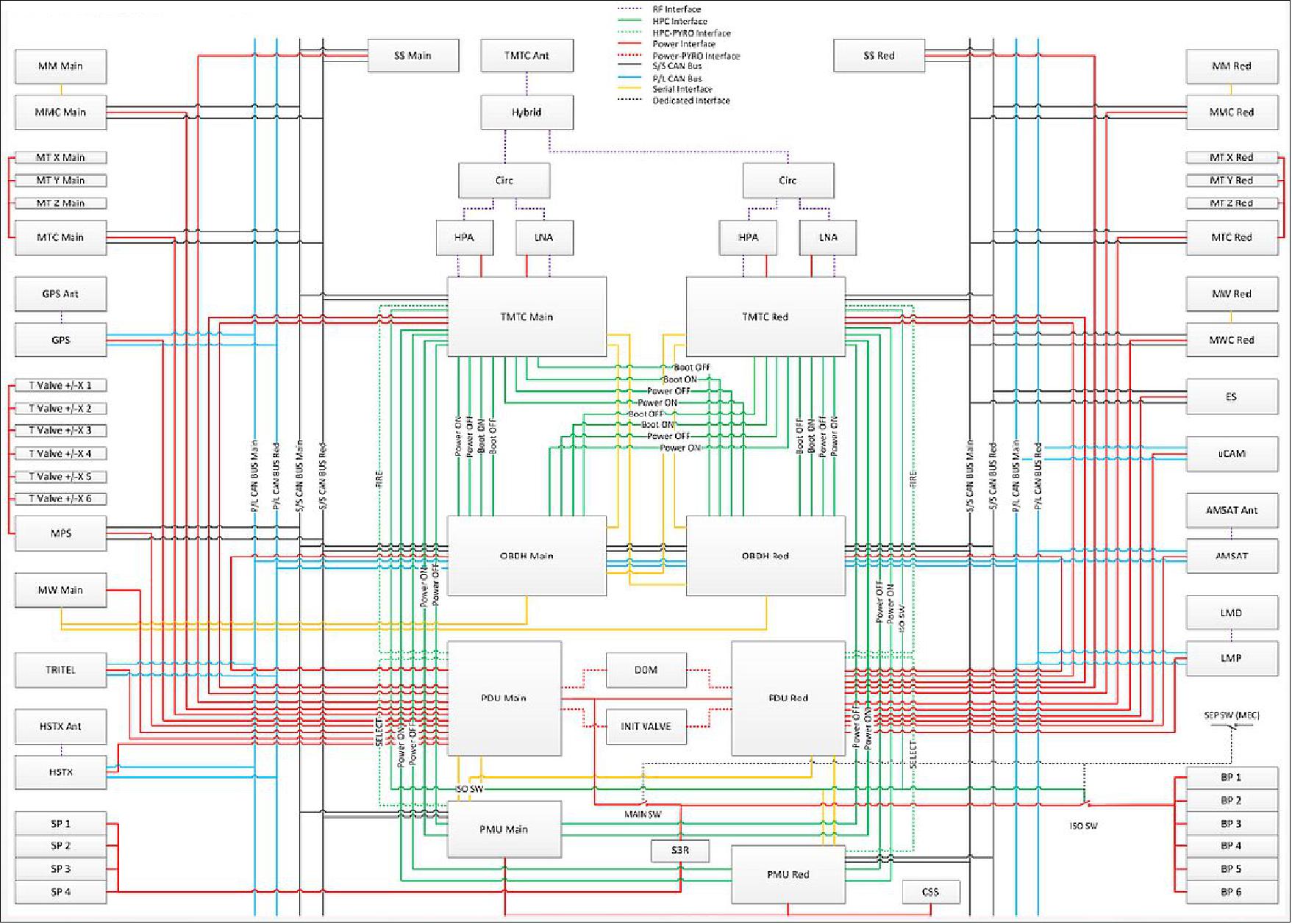
OBDH (On-Board Data Handling subsystem)
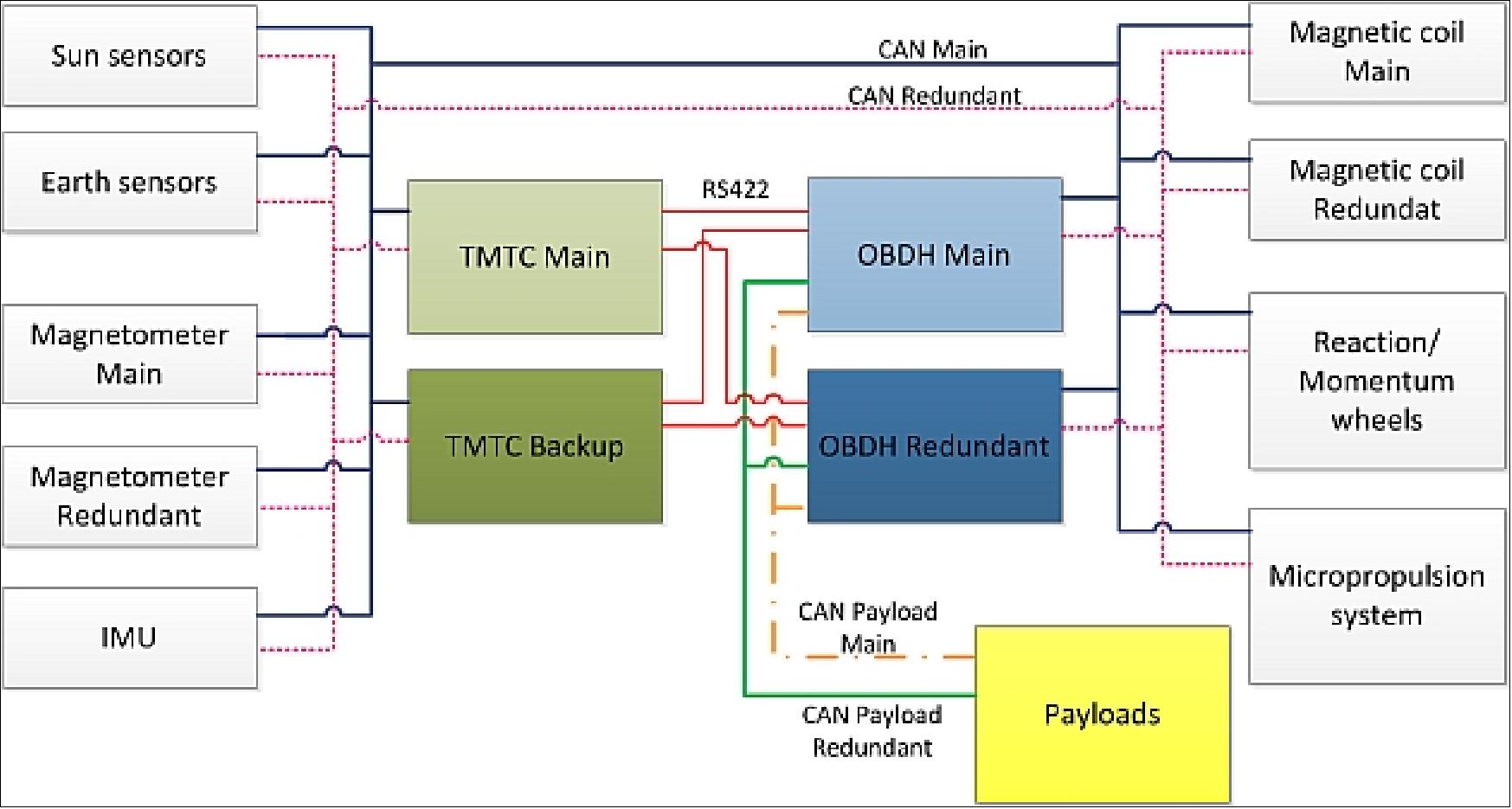
The OBDH consists of one main and one redundant computer unit, based on the STM32F107 ARM microcontroller. The computer hosts both, the AOCS and OBDH functionalities, therefore it is equipped with the necessary interfaces to communicate with the subsystems and payloads. The computer unit communicates with all subsystems with two independent CAN interfaces, while an additional pair of CAN interfaces is dedicated to the data exchanges with the payloads. Finally the computer unit is connected with TMTC main and TMTC redundant strings using two independent UART (Universal Asynchronous Receiver/Transmitter) interfaces implemented with the RS-422 standard. Moreover, open collector digital inputs are used to let the TMTC main and redundant set the unit in programming mode, and to select which of the OBDH main and redundant shall be powered on.
The OBDH functionalities are: collecting platform and payloads housekeeping data, and generate periodic reports to be transmitted to the ground segment; record historical housekeeping data, for a maximum of 7 orbit periods, to be transmitted to the ground upon request; monitor a subset of relevant housekeeping parameters to generate errors and warnings; receive, execute or route telecommands from the ground segment; generate internal telecommands to manage the subsystems.
EPS (Electrical Power Subsystem)
The EPS comprises the SA (Solar Array), BP (Battery Packs) and PMB (Power Management Board). An unregulated power bus is used. Based on the ALMASat heritage, the solar array will be body fixed and the battery will be based on Li-ion cells. The main tasks of the PMB are to control and monitor the power distribution and power consumption of the units, to monitor the status of the solar arrays, and to monitor the status, charge process and temperature of the battery. The design of the PMB includes redundancy for critical functions and interfaces with both the OBDH and TMTC.
RF communications
The TMTC subsystem consists of a digital transceiver electronic board (RTx), RF front-end and the antenna network. The digital transceiver consists of a redundant board managed by a microcontroller device whose main goals are to receive digital telemetry data from the OBDH board and generate the downlink signal for transmission operations, to receive telecommands from the GS (Ground System) and to send to the OBDH board the digital bit stream. The RF front-end consists of the RF distribution unit based on a passive six-ports hybrid coupler and a circulator while the HPA (High Power Amplifier) and LNA (Low Noise Amplifier) will introduce the appropriate RF signal amplification to establish a reliable link with the GS. The antenna network is a vase turnstile antenna consisting of an array of four dipoles placed in the zenith facet of the spacecraft.
The TMTC subsystem exchanges its data with the OBDH subsystem through a dedicated UART interface included in the electronic board design. As each TMTC board needs to be connected to both OBDH boards, two UART interfaces are included. Furthermore, the redundant CAN bus is used for communication with the PMU (Power Management Unit) board and reboot operation. The TMTC subsystem guarantees a cold redundancy of the transmitter and a hot redundancy of the receiver.
ESEO technology demonstrations and tests conducted
• At platform level the following items are implemented as in-orbit technological demonstrators:
- In house developed cold-gas micro-propulsion subsystem
- In house developed momentum wheel
- Integrated Current Limiter for power distribution unit (ESA CFI)
- Integrated Single Event Latch-up protection for digital devices (present in particular in OBDH and TMTC subsystems)
• The model philosophy foresees Elegant Breadboard (EBB) and Proto-flight models (PFM)
• EBBs implemented with COTS components and going to face qualification tests (including environmental)
• Confidence tests (VFT) are performed before CDR
• A set of electrical and functional confidence tests (included in the VFT category) were agreed with ESA and successfully completed
• The following verifications were performed:
- Envelope and mass measurement, mechanical interface check
- Signals verification on electrical interfaces (power supply, CAN, RS-232/RS-422/RS-485, pulse command, dedicated data I/F)
- Power consumption measurement, including in-rush current, ripple and DC-DC secondary output measurement in idle and working conditions
- Over-voltage protection circuit activation on secondary power buses
- Pulse command interface (inhibit, reset, re-programming mode) verification.
• Tests have been repeated at -25°C and 70°C
• TID (Total Radiation Dose) and SEE (Single Event Effect) tests were performed on the selected microcontroller
• DOM (De-Orbit Mechanism) performed more than 20 successful consecutive deployments after environmental testing
• GPS successfully completed verification functional test and interface check including a specific test campaign at ESA/ESTEC dedicated to the verification of the two redundant front-ends
• TRITEL (Three-Dimensional space dosimetric Telescope) unit successfully completed electrical and functional tests at ambient, minimum and maximum temperatures
• HSTx (High Speed Transmitter) completed several transmission tests in order to verify data-rates, bandwidth and power consumption at the different operational modes
• ADE (ADCS S/W Experiment) completed algorithms coding, test on the OBDH hardware representative model and measurement of the performance
• AMSAT successfully completed electrical verification and functional tests.
Launch: The ESEO microsatellite was part of the SSO-A rideshare mission of Spaceflight (total of 64 satellites) launched on 3 December 2018 (18:34:05 GMT) on a SpaceX Falcon-9 Block 5 vehicle from VAFB (Vandenberg Air Force Base) in California. 17) 18) 19) 20)
SpaceX statement: On Monday, December 3rd at 10:34 a.m. PST (18:34 GMT), SpaceX successfully launched Spaceflight SSO-A: SmallSat Express to a low Earth orbit from Space Launch Complex 4E (SLC-4E) at Vandenberg Air Force Base, California. Carrying 64 payloads, this mission represented the largest single rideshare mission from a U.S.-based launch vehicle to date. A series of six deployments occurred approximately 13 to 43 minutes after liftoff, after which Spaceflight began to command its own deployment sequences. Spaceflight's deployments are expected to occur over a period of six hours. 21)
This mission also served as the first time SpaceX launched the same booster a third time. Falcon 9's first stage for the Spaceflight SSO-A: SmallSat Express mission previously supported the Bangabandhu Satellite-1 mission in May 2018 and the Merah Putih mission in August 2018. Following stage separation, SpaceX landed Falcon 9's first stage on the "Just Read the Instructions" droneship, which was stationed in the Pacific Ocean.
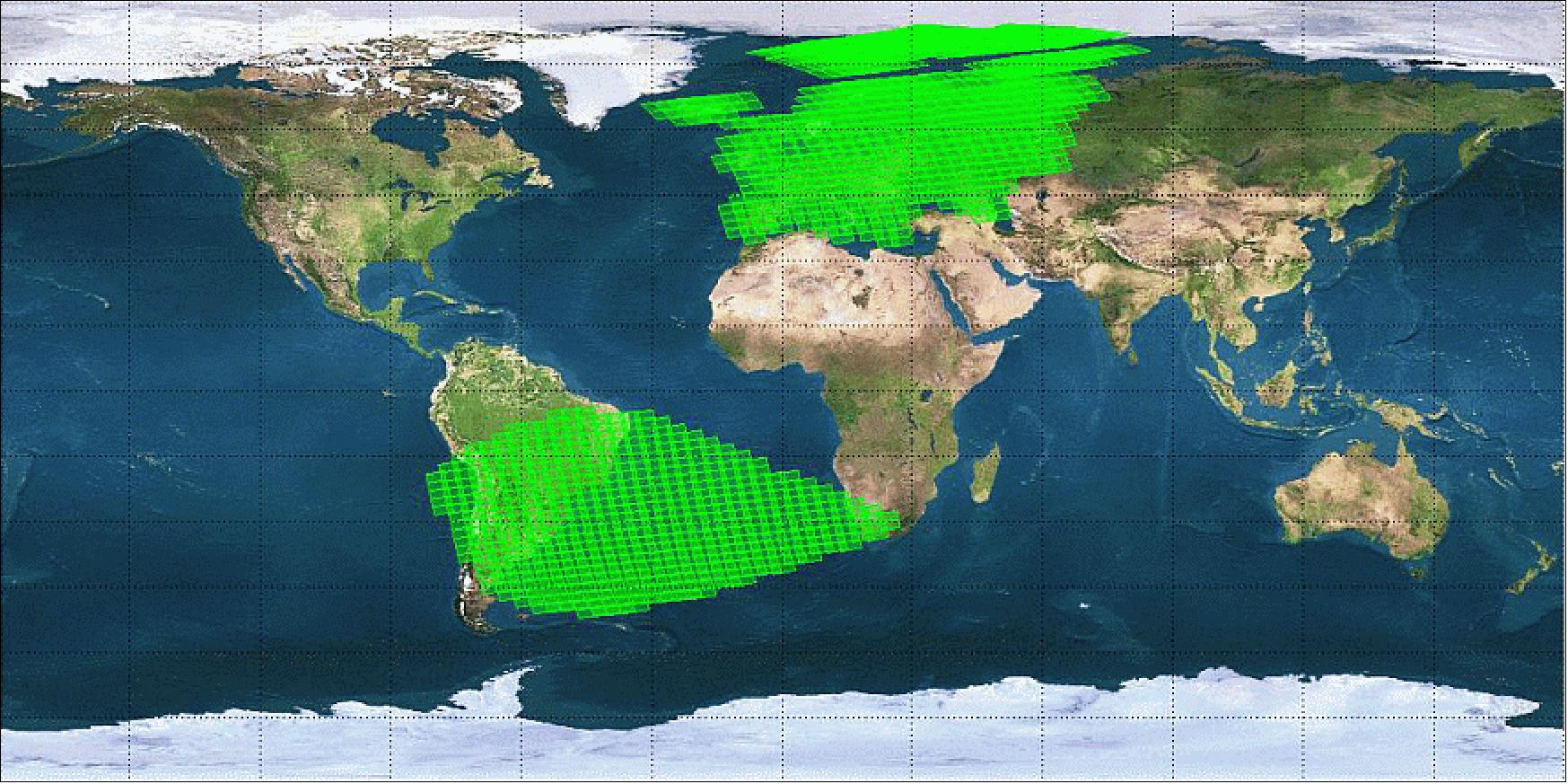
Orbit: Sun-synchronous circular orbit with an altitude of 575 km, inclination of ~98º, LTDN (Local Time of Descending Node) of 10:30 hours.
Mission profile: The orbit produces about 15 orbit per day, in order to complete the coverage of the selected areas of interest (Europe and South Atlantic Anomaly). The definition of the areas of interest was driven by the optical payload and the scientific instruments requirements.
Mission Status
• December 4, 2020: After almost two years in space, ESA's European Student Earth Orbiter mission – ESEO – is coming to a close. Designed by students, for students, it has raised the bar for what can be achieved by university student teams. 22)
- Numerous technical setbacks provided additional hurdles, but also extra opportunities for students to learn about the reality of working with advanced hardware and software in orbit around our planet.
A satellite by students, for students
- ESEO was envisaged by ESA Academy's hands-on space program as a revolutionary educational project; nothing less than a fully-functional satellite, with scientific and technological payloads designed and operated entirely by university students. This provided a unique opportunity for students across Europe to gain significant practical experience in the design, development, launch and operations of a real space mission – for many, a dream come true.
- In total, more than 600 students from ESA Member States have been involved in ESEO, from the project's beginnings and during each phase and iteration, developing the scientific and technology demonstration payloads, key sub-systems, and the entire ground segment. Throughout the project, students took part in workshops and lectures, were directly involved in the technical project reviews, and actively worked on the design, development, and testing of their hardware and software. "I came to the ESEO project when I was applying for the doctorate program in the field of space debris mitigation," recalls Dr. Chiara Palla, who worked on ESEO during her time as a PhD student at Cranfield University. "In fact, at Cranfield we were developing a drag sail mechanism to de-orbit the satellite. ESEO provided the chance to fully design, manufacture and test the device. This was an invaluable opportunity to engineer real space hardware and get hands-on with a space mission cycle in a fully international environment. I'm really convinced that the experience gained from ESEO has been driving me to successfully perform new research and lead new teams."
- To make ESEO a reality, ESA teamed up with Prime Industrial contractor SITAEL. This leading Transportation and Aerospace Group developed the satellite platform, then performed the integration and testing of the whole spacecraft, including the integration of the student-built payloads and subsystems. In addition, they provided valuable and much appreciated technical support to the student teams under ESA's coordination. Viktor Qiao was a student from the Hungarian Langmuir Probe team. He explains, "When I joined the Laboratory of Space Technology at the Budapest University of Technology and Economics, I was very lucky, because I was just in time to participate in the development of the Langmuir Probe for ESEO. It was the first engineering project that I worked on and I'll never forget all the practical skills I learned, and the experience of working with ESA professionals and participating in the final test campaign. Working with SITAEL was an excellent opportunity to gain experience in engineering fields other than our own, such as mechanical and systems engineering. It also provided a glimpse into the day-to-day reality of work within the space industry. I'm now a PhD student, and I'll always be proud of ESEO as the project that started my engineering career – hopefully only the first in a long list of projects to come."
- A further valuable contribution by industry for the success of the ESEO project came from ST Microelectronics, which donated a set of Integrated Current Limiters used for the development of the power distribution board by the student team from BME Budapest.
A lasting legacy
- Originally designed to be in orbit for just six months, project extensions have seen ESEO circling our planet for almost two years. The spacecraft performed commissioning of the platform but was unable to reach its nominal attitude, and therefore, ideal operational mode. Due to a variety of technical challenges and hurdles, the mission operators were only able to activate a subset of the payloads, leading to reduced success in achieving the science objectives.
- Learn more about ESEO's in-orbit challenges and successes.
- Despite – and indeed perhaps also thanks to – the setbacks, the educational return for the students involved over the lifecycle of ESEO has been truly vast, and ESEO's overarching educational objective was achieved: for university students to acquire hands-on experience of the full life cycle of a real space project, real-life troubleshooting included, in order to prepare a well-qualified technical workforce for the European space sector.
- "Remarkably, the participating students took a complicated space mission all the way from conception to operation in orbit," says Hugo Marée, Head of the ESA Education Office. "The hurdles they overcame along the way have contributed to a great deal of learning, and given them unparalleled experience that will serve them well in their future careers in the space industry."
- ESEO's mission may be over, but its story does not end here. ESA and SITAEL are preparing a second In-Flight Experience Workshop for students, with sessions themed on lessons learned during the operational phase of ESEO, as well as practical classes using an engineering model of the satellite. Furthermore, ESA is planning full training weeks based on the ESEO experience. Papers will also be published to disseminate ESEO's learning among the wider community.
- Alberto Lucci was a student at the University of Bologna working in ESEO's Mission Control Centre. Like many of those involved, he now looks back on his time with ESEO as an inspirational and transformative experience. "Working on ESEO was like being on a roller coaster," he remembers, "from the happiness of the first signal we received, to the concern for newfound issues, gasping with satisfaction at making recoveries, to the long nights spent executing operational procedures. This adventure will always be a milestone of my career. ESEO represented a chance for personal and professional growth: it taught me that with passion and expertise you can transform your dream into a career!"
• May 23, 2019: ESEO experienced an anomaly after having started its commissioning. However, the educational path of the ESEO students continues. 23)
- The ESEO AMSAT-UK radio payload was successfully activated in the morning of 12 April 2019, and it started transmitting its payload telemetry. These data were received by many radio amateurs around the globe.
- Unfortunately, a few hours after the AMSAT-UK activation, ESEO suddenly started to behave anomalously, repeatedly sending the same notification message to ground, which normally should have been sent only once. The continuous use of the radio transmitter to send these notifications, in combination with the AMSAT-UK activation, led to a temporary discharge of the battery when the spacecraft was in eclipse. This under-voltage then triggered the protections to automatically shut-down the AMSAT-UK payload.
- A clear reason for the anomaly has not been identified yet, but the most accredited hypothesis is a possible radiation effect on a memory cell, which in principle could be recovered through an automatic reboot of the on-board computer (data handling system), that cannot however be anticipated.
- Until this malfunction is resolved, ESEO cannot receive telecommands and its in-orbit commissioning cannot continue.
- However, ESEO can still transmit correctly. Every 5 minutes the spacecraft sends to ground general data on its health status. The data show that the satellite's power subsystem is able to correctly recharge the batteries of the spacecraft, and that the electrical and thermal parameters of the satellite do not show significant anomalies.
- These data are systematically stored in a database and are accessible on-line to the ESEO students for educational purposes.
- The students of the University of Bologna, responsible of the ESEO Mission Control Center, in Forlì (Italy), commented: "We are looking forward to the in-depth analysis of all the ESEO telemetry which we are receiving regularly. This will offer us a lot to learn," they continued. "Every unexpected difficulty we had to deal with so far during the ESEO mission operations pushed us to stretch our knowledge in order to find the way to resolve it. Now we are looking forward to resolve also the current issues to be able to complete the in-orbit commissioning."
"On 28 May 2019 we will hold a dedicated webinar for all the ESEO student teams," said Piero Galeone, responsible of the ESA Academy program of which ESEO is a part. "The objective is to illustrate and explain the current status of the mission. This will be followed in July 2019 by a whole workshop focused on the ESEO in-flight experience, in order to enhance the students' learning opportunities at maximum extent."
• March 22, 2019: Weeks after ESEO's insertion into orbit, and after some trouble-shooting actively involving students, the satellite has finally started its in-orbit commissioning. While ESEO was able to transmit spacecraft data to ground soon after insertion into orbit, for a few weeks it was not able to react to commands sent from Earth. As programmed to do in case of lack of communication with its ground stations, ESEO switched to safe mode, meaning a minimized power consumption and the execution a few essential tasks. 24)
- Therefore, not all the spacecraft subsystems could be normally activated and checked, and the ESEO nominal mission - with all the planned student observations and operations - could not yet start.
- The students from the ESEO main and back-up Mission Control Centers (at University of Bologna and University of Vigo, respectively), working closely with ESA and SITAEL, the industrial prime contractor, investigated why ESEO would not react to commands.
- ESEO Mission Control Center students were guided by ESA and SITAEL experts through double checks of pre-flight test reports, of the functionality of the Mission Control Center and of the ground stations, and the communication protocols, just as professional engineers would do. They also investigated possible radio interferences from other Earth sources.
- "If I had to use a word to describe the ESEO mission I would say: challenging!" said Alberto Lucci, ESEO student from the University of Bologna. "In the team we felt like Sherlock Holmes trying to identify the reasons causing the anomalies, and to find the most effective solutions," he continued. "We have considered each and every unexpected problem as a chance for professional growth, and I am deeply convinced that my experience with ESEO has been a golden opportunity for me to become a better young professional."
- Working with dedication on long shifts, the Mission Control Center students also made several attempts to transmit commands to ESEO from different ground stations. The relentless support of the ESEO team in Tartu, Estonia, came then into hand. They offered a ground station capable of transmitting with higher power than originally planned, operating on a non-interference basis with other ground stations, to be remotely controlled from the Mission Control Center, and ESEO finally reacted!
- The reasons for ESEO's degraded receiving performance are still being investigated. However, since a suitable way to operate the spacecraft has been found, on 14 March 2019 the students of the University of Bologna succeeded in bringing ESEO from safe mode to nominal operating mode.
- ESEO's telemetry data indicated that all on-board subsystems are up and running, including the sun sensors and the momentum wheels, needed to control the orientation of the spacecraft. SITAEL was then able to upload to ESEO, on 21 March 2019, all the commands needed by the spacecraft to determine its exact orbital position and motion.
- "No doubt that conducting the ESEO mission was much harder than I thought, but this is why I did not give up. No pain, no gain," said Giacomo Curzi, another ESEO student from the University of Bologna. "We have shared the experience of operating a real spacecraft, we collaborated to ensure ESEO could be monitored and controlled in the best way, we have set up connections to share facilities from different distant locations, we have given each other Saturdays and Sundays of work. Probably, our educational experience with ESEO is even bigger because of the unexpected troubles that occurred. If ESEO had been perfect we could not have gotten all this out of it. Let me thank ESA, SITAEL, and all the ground teams with which I have the pleasure to work," he concluded.
- ESEO has now officially started the so-called on-orbit commissioning, where all the spacecraft subsystems (power, communication, attitude control, thermal control, on board computers, etc.) will be checked. This phase is expected to last a couple of weeks.
- Then, finally, all the student experiments will be tested, and after this ESEO's 6-month nominal mission can start.
- "The ESEO early-operations phase offered the opportunity to the students to feel the thrill of fighting to overcome unexpected real-life difficulties," added Gilles Mariotti, ESEO avionics engineer at SITAEL. "The theory of engineering is often limited to abstract calculations and analyses, where everything is ideal. Facing the need to quickly respond to unexpected events, and to carefully execute real-time operations with tight timing constraints, represents for the students an important professional challenge. They have learned that, regardless of how carefully you may plan your mission preparation, during the execution of the real mission you will need to use your engineering skills in combination with a good dose of technical flexibility and creativity to adapt and overcome unexpected problems."

• December 3, 2018: The ESEO Mission Control Center managed by students of the University of Bologna, Italy has just confirmed the acquisition of the first signal from ESEO. The satellite which was inactive during launch, activated itself just after separation from the launch carrier and started transmitting at 22:21 CET (21:21 GMT). A first assessment of the ESEO telemetry seems to show nominal parameters, but the details will become available in the next hours. 25)
Sensor Complement
During its operational mission phase, ESEO will run the scientific experiments and test the various technology demonstrators designed and built by the students, and constantly monitor its own performance. 26)
The ESEO microsatellite carries six payloads: µCAM (micro Camera), LMP (Langmuir Probe), Dosimeter instrument (a 3D silicon detector telescope - Tritel-S), Star tracker, Reaction Wheel, AMSAT payload (UHF/VHF, S-band transponder).
µCAM (Micro Camera)
The objective of µCAM is to provide ESEO with Earth imaging capabilities. The supervising institute is the Tartu Observatory at the University of Tartu, Estonia.

The optical payload consists of two miniature camera modules: a wide-angle camera (primary) and a telescopic camera (secondary). The primary camera is a slightly modified version of the ESTCube-1 optical payload, which proved resilient to cosmic conditions and provided 300 beautiful images of the Earth over a period of two labor-intensive years in orbit. The optics yield a field of view of 65.8°, and the camera has a color image sensor with VGA resolution (640 x 480 pixels). The payload's possible applications range from monitoring plankton blooms to changes in the polar ice caps.
The secondary camera is an experimental module that does not yet have a spaceflight heritage. It provides a field of view of 8.16° and features a color image sensor with 2592 x 1944 pixels (5 MP). This results in high-resolution images, where one pixel on an image covers an area of about 20 x 20 meters.

LMP (Langmuir Probe)
LMP is developed by the Budapest University of Technology and Economics team. The objective of LMP is to provide ESEO with plasma measurements capabilities and to investigate the solar activity. Besides analyzing the normal characteristics of the plasma, the LMP payload will acquire scientific data of the geomagnetic disturbances induced by solar eruption and CME (Coronal Mass Ejection). These phenomena are accompanied by ionospheric storms, characterized by abrupt changes of the electron density. Another important objective is to obtain more information about plasma anomalies. The effects of the solar wind can be analyzed by investigating the magnetic disorders and observing the spatial and temporal extent of plasma anomalies. Different types of anomalies are to be observed, including the South-Atlantic anomaly, the Equatorial anomaly, etc. These irregularities influence the function of electrical instruments, and the density of charged particles play an important role in heat transfer, thus it has effect on both the space and Earth weather.
The LMP payload consists of a Langmuir probe and an electronics unit. The 39 mm long cylindrical probe mounted on the satellite is a metallic electrode immersed in the plasma. In order to perform measurements in the undisturbed plasma, a 91 mm spacer is used to hold the probe far enough from the satellite structure. The LMP experiment is based on measuring the current voltage curve of the probe. The sun-synchronous orbit of the ESEO satellite provides a unique opportunity to perform measurements with a good resolution of the plasma that surrounds the Earth.
TriTel (Three-Dimensional space dosimetric Telescope)
TriTel is an instrument provided by students of the Budapest University of Technology and Economics (BUTE), Budapest, Hungary. The objective of TriTel is to measure the cosmic radiation field and plasma processes in the near-Earth region, in particular in the SAA (South Atlantic Anomaly), on the variations in space weather and the effects of solar activity on the Earth's magnetic field. 27) 28)
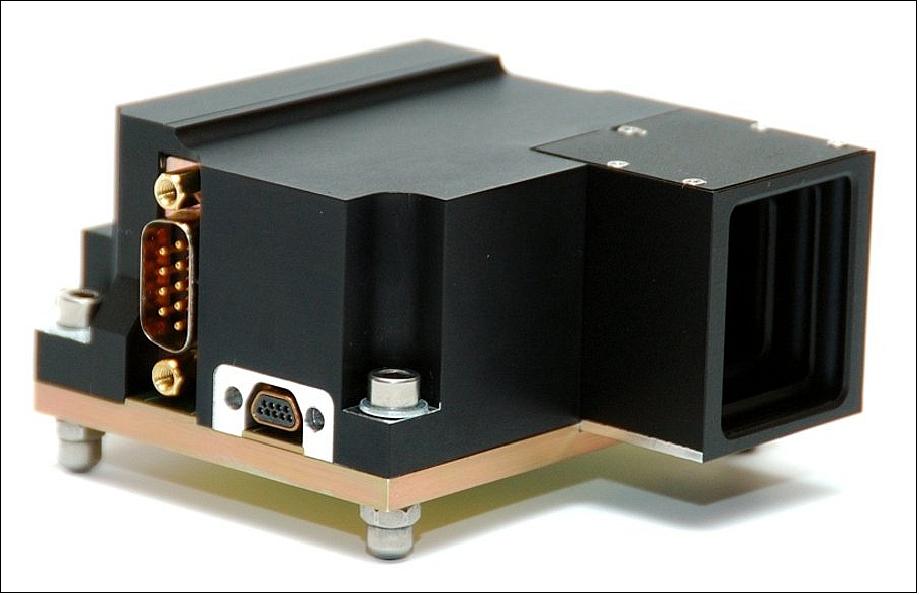
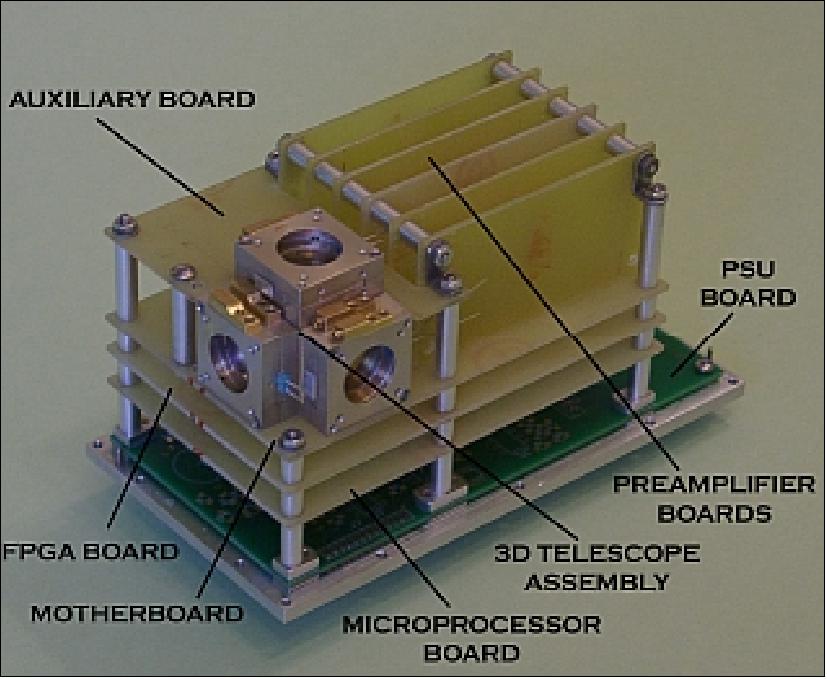
Background: The development of the TriTel 3D silicon detector began in the KFKI (Atomic Energy Research Institute) of the Hungarian Academy of Sciences several years ago. By evaluating the deposited energy spectra recorded by the instrument the absorbed dose, the LET (Linear Energy Transfer) spectra in three directions, the average quality factor of the cosmic radiation and the dose equivalent can be determined for different segments of the orbit. The instrument, comprising three mutually orthogonal, fully depleted PIPS (Passivated Implanted Planar Silicon) detector pairs is designed to measure the energy deposit of charged particles (Figure 17).
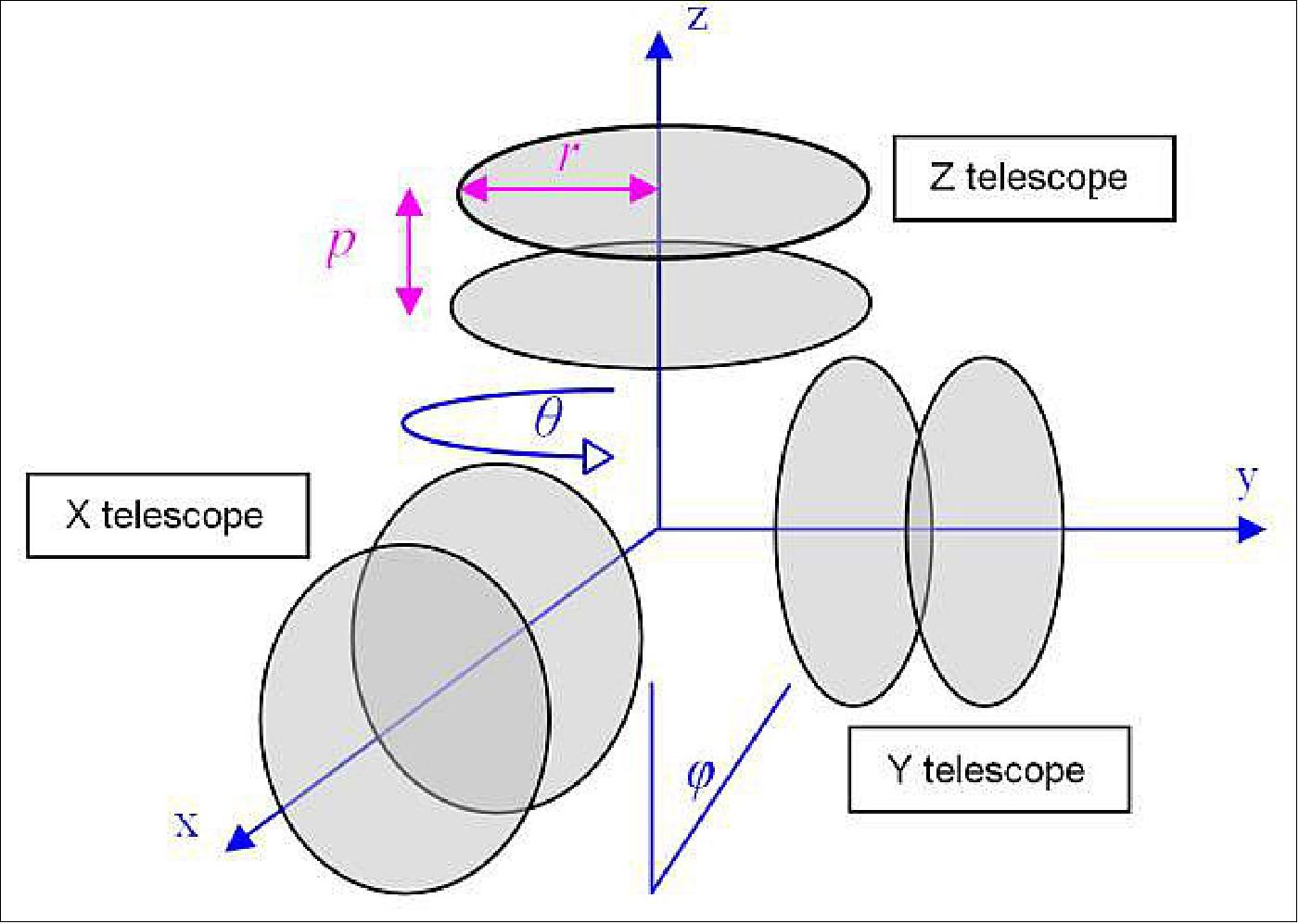
The detectors are connected as AND gate in coincidence in pairs forming the three orthogonal axes of the instrument. By evaluating the deposited energy spectra recorded by TriTel, the absorbed dose, the LET spectra in three directions, the quality factor and the dose equivalent can be determined. Since we are interested in the equivalent dose in tissue, the LET spectra in silicon will be converted to LET spectra in human tissue.
Although the instrument cannot determine the arrival direction of the individual particles, due to the three-axis arrangement, an assessment of the angular asymmetry of the radiation might be possible. The effective surface of each detector is 220 mm2 with a nominal thickness of 300 µm. The most important geometrical parameters of the TriTel telescope are summarized in Table 1.
Radius of the detectors (r) | 8.4 mm |
Effective surface of the detectors (A) | 220 mm2 |
The gap between the detectors in one telescope axis (p) | 8.9 mm |
Ratio of the separation between the detectors and the radius (q = p/r) | 1.06 |
Geometric factor, G (for one telescope axis in 4π) | 5.1 cm2 sr |
Maximum angle of incidence (for one detector pair) | 62.1º |
Minimum path length in the detector (depletion layer thickness, w) | 300 µm |
Average path length in the detector (for an isotropic field) | 361 µm |
Maximum path length in the detector (for maximum angle of incidence) | 641 µm |
Ratio of the maximum and minimum path lengths | 2.14 |
Since the spectrum of the trapped radiation inside the SAA (South Atlantic Anomaly) is significantly softer, it is worth collecting the SAA and non-SAA spectra separately.
The main design goal in the frame of the ESEO mission is to design, develop, manufacture and verify through an intensive test campaign a new, satellite version of the TriTel three dimensional dosimetric telescope.
The first level of the proposed design work is to study the expected radiation environment in order to draw conclusion about the measurement behavior of the original TriTel instrument (saturation, low noise level, shielding thickness in front of the silicon detectors, optimal measurement parameters, etc.). The second level of the design work is the mechanical and electrical design changes and implementation. The mechanical design work is based on a model approach in which the ESEO-TriTel payload design should build up in a 3D modelling environment together with the satellite structure and simulate based on the input parameters provided by ALMASpace. The thermal design is an important part of the mechanical design work and should be well simulated using the 3D mechanical model and the environmental conditions provided by ALMASpace.
Based on the results of the simulation the mechanical structure of the ESEO-TriTel EQM will be manufactured and verified according to the ESEO verification and test plan to make it flight proven. The electrical design work focuses on the electrical interfaces to the ESEO satellite system: power and data interfaces. In case of the power interface according to the new ESEO design some modifications might be needed on the original TriTel PS (Power Supply) board. In case of the data interface the communication will be based on the CAN (Controller Area Network) open protocol. The CAN interface shall be implemented into the electrical system of the original TriTel instrument.
The TriTel CPU ( Central Processing Unit) software shall be rewritten to implement the CAN communication protocol according to the ESEO requirements. The behavior of the TriTel electrical system, connected to the ESEO system, will be well studied and modified if needed (additional input EMC (Electromagnetic Compatibility) filtering circuits, electronic fuses inside the TriTel, 60 V high voltage for silicon detectors and its influences, etc.). The modified TriTel electrical system shall be manufactured and built into the ESEO-TriTel EQM.
The third level of the engineering work is to carry out the verification process of the ESEO-TriTel payload on the ESEO-TriTel EQM following the ESEO verification and test plan. The EQM will be calibrated and functionally tested as well in different radiation environment tests.
Mass, size | 0.95 kg, 155 mm [L] x 107 mm [W] x 83 mm [H] |
Power consumption | 2.8 – 2.9 W |
Input voltage range | 15.5 – 34.0 V |
Operational temperature range | -40 to +30ºC |
HSTx (High Speed Transmitter)
The S-band communication subsystem HSTx is developed by the student team of Wroclaw University of Technology, Poland. HSTx is provided as a technology demonstration device to allow a high data rate downlink of the payload data. The HSTx comprises a high data rate transmitter, an RF power amplifier, and an antenna. The S-band communication subsystem is capable to transmit data to the ground segment in the 2200-2290 MHz frequency range with data rates ranging up to 8 Mbit/s. The objective is to enable the downloading of data stored in the payload memory for a time of up to 7 no-contact orbits.
The signal on the downlink can be modulated in five ways (BPSK, QPSK, OQPSK, 4D-TCM-8PSK - 2.0 and 2.5). The downlink binary stream is CCSDS protocol compliant. It uses concatenated coding, incorporates the ASM marker, and operates virtual channels for the telemetry transfer frame protocol.
An important feature of the HSTx transmitter is the implementation of functions normally allocated to onboard computers. In the case of ESEO, the S-band communications system acquires all data produced by the payloads and stores them in an internal memory until the S-band ground station is visible.
GPS Receiver
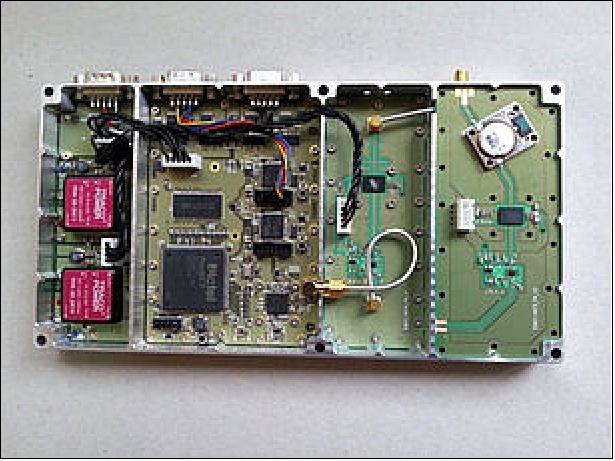
The student team of the University of Bologna, Italy, is providing the GPS receiver for orbit determination. The instrument is composed of three units: the receiver antenna, mounted on the satellite top surface; the GPS based-band processor, a COTS component which generates the GPS observables, pseudoranges and carrier phases; the navigation unit, a computer that executes the navigation algorithm and provides satellite position and velocity. The navigation algorithm is a sophisticated software that puts together the GPS measurements with a detailed model of the satellite orbit, in order to generate sub-meter satellite positioning.
The main objectives of the GPS receiver development are to test COTS technologies for the reception of the GPS signal in space environment, and to test the on board navigation algorithm based on Kalman filter and single frequency observations. The purpose of the ESEO GPS receiver is to provide proof of reliable meter-level 3D RMS positioning in a real-time mission environment, using a single frequency GPS L1 C/A receiver coupled with a sophisticated on-board navigation algorithm. This paper describes the receiver design details, with focus on the software navigation algorithm. An effort has been made to formalize the approach to the GPS-based navigation filter tuning which, among others, is one of the most complex tasks in filter design. Although the receiver architecture is based on terrestrial technology, various design techniques are applied to improve its reliability in the space environment. Apart from cold redundancy of the front-end, the unit is equipped with a high-reliability isolated DC-DC converter, and each front-end is monitored for current absorption and equipped with a current limiter. The navigation filter is based on single frequency C/A code and GRAPHIC observations. It is a variable state dimensions filter, since for each satellite in-view an ambiguity is included in the state vector. The filter is then completed with a detailed orbital acceleration model. 29)
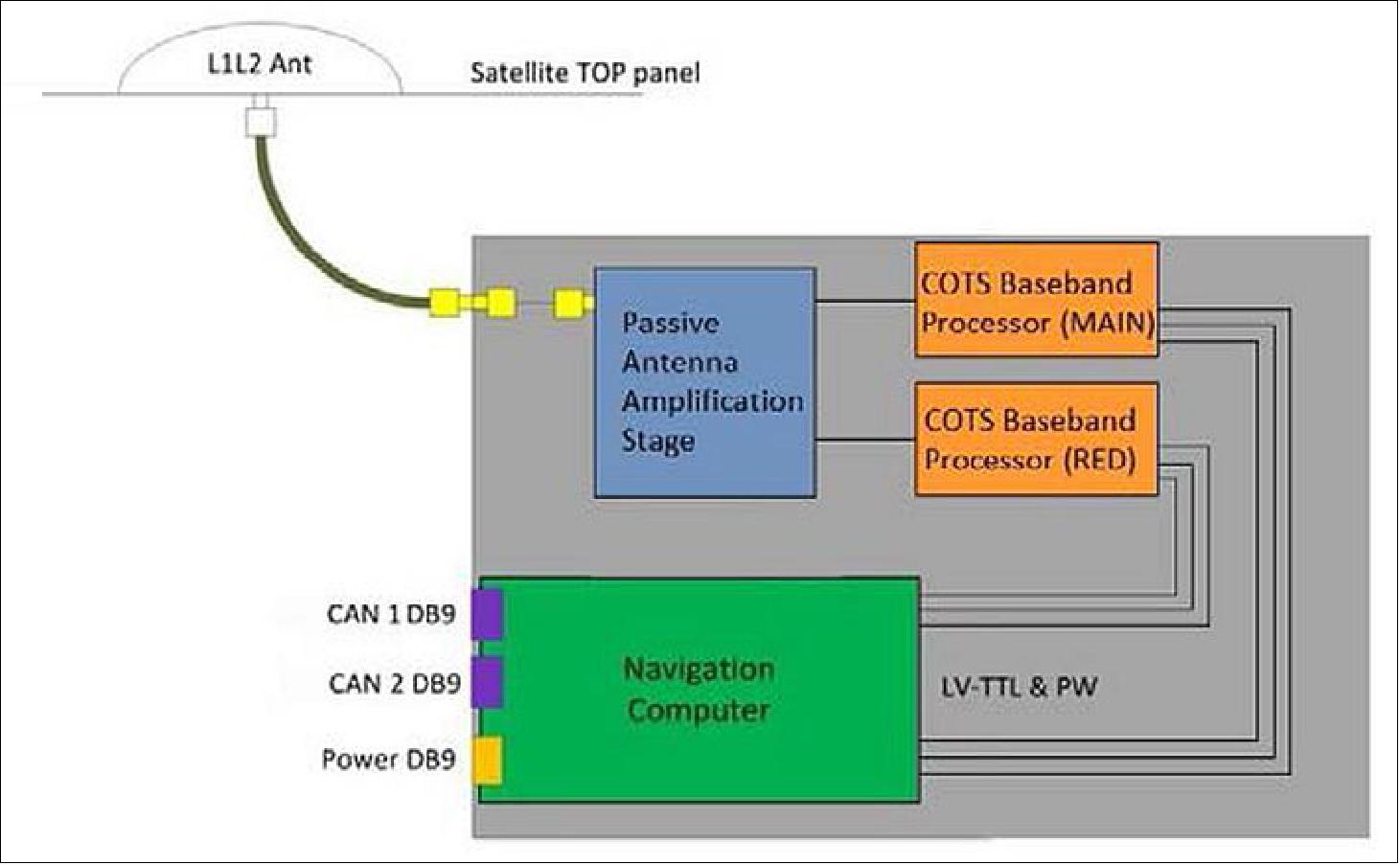
The ESEO GPS receiver is composed of four functional units connected together (Figure 20):
• The based-band processor: it is a OEM615 receiver, from NovAtel, that performs GPS signal acquisition, tracking and data demodulation. It provides the raw GPS measurements together with the GPS satellite broadcasted navigation data that is required to compute the navigation solution. The unit is provided by the manufacturer with removed COCOM limitations. Two of these devices are included inside the payload configured to work in cold double redundancy.
• The passive antenna amplification stage: it is the PCB (Printed Circuit Board) designed to provide the correct interface between the passive antenna and the based-band processors.
• The navigation processor: it is a custom on board computer that hosts the navigation filter and manages the power for the entire payload and antenna. It also collects positioning data and distributes them to the other subsystems (Figure 21).
• The GPS antenna: a passive antenna from Sensor Systems, model S67-1575-20, mounted on the satellite top panel (Figure 22).
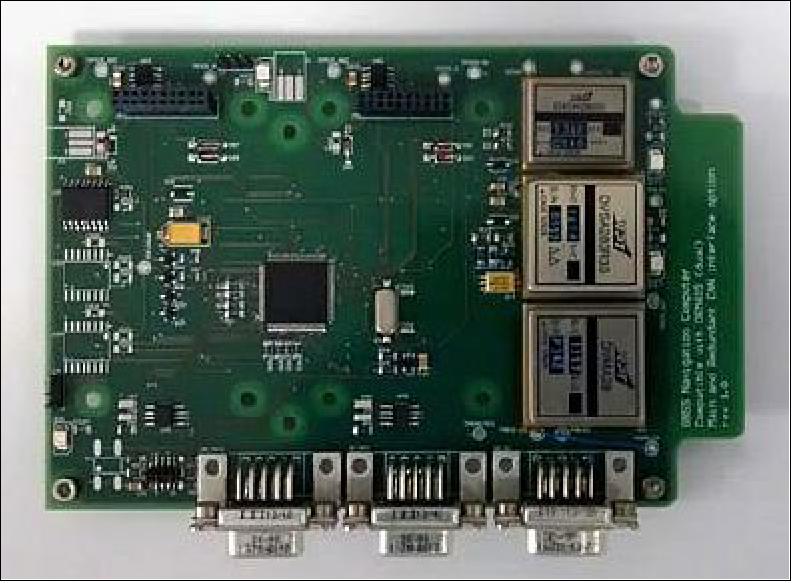

Electronic design: The electronic design of the navigation computer is based on the ARM Cortex microcontroller STM32F407, equipped with single precision FPU, capable of 1.25 DMPIS/MHz, with maximum clock frequency up to 168 MHz. Two DC/DC converters are included and supported by an overvoltage protection circuit that continuously monitors the voltage of the circuit. An overvoltage sensing circuit activates a latch through an optoisolator, once a voltage higher than 3.3 V or 5 V is detected, that disables the output on both voltage regulators.
Also a current limiter stage was implemented in order to avoid that a wrong behavior of one of the two front-end, due to the effect of space radiations, could damage the navigation computer. This limitation circuit is placed between both main and redundant front-end and the power source. It can be activated with a digital output from the microcontroller and once an excessive current absorption is detected, the voltage drop on the sensing resistor is used by an amplifier stage to reduce exponentially the current that flows into the front end. At the same time the limiter status is monitored by the microcontroller with a digital input, so that the microcontroller can disable the malfunctioning front end and enable the redundant one.
Satellite position determination: The selected microcontroller hosts the navigation filter, a sophisticated algorithm that combines the raw measurements provided by the baseband processor with a detailed model of the satellite orbit. In order to test codes with different level of complexity, two different algorithms will be hosted by the navigation computer:
• Kinematic solution: it is the simplest algorithm, a direct computation of the receiver position from the raw observables, without filtering it by an orbit dynamic model. The provided accuracy is the typical accuracy of ground application, between 10-15 m 3D RMS (Root Mean Square). The method used to determine the position is based on Least Square Algorithm.
• Reduced dynamic solution: this algorithm is based on the integration of the raw observations within an accurate orbit dynamics model. According to the complexity of the model and to the selected observation combination, this algorithm 3D RMS accuracy is between 60 and 80 cm.
The data produced by the navigation algorithm, which can be communicated to other satellite subsystems or transmitted to the ground station are: (a) position, velocity and time offset fixes, that are either communicated in real-time upon requests or recorded inside the unit as daily records, in order to be transmitted to the ground infrastructure as mass memory data; (b) daily raw observation records (pseudoranges and carrier phases) provided directly by the COTS front-end, that can be also used to compute the satellite orbit off-line, using POD software, in order to have an accurate reference orbit for on board solution comparison (generally the POD orbit accuracy is around 4cm 3D RMS). In default conditions, both fixes and raw data are recorded every 30 seconds.
Receiver test and verification: A functional test was performed on the COTS front end at the ESA/ESTEC facilities in Noordwijk (the Netherlands), in order to ensure that the receiver is suitable for operation on-board the satellite. The receiver has been connected to the development board which in turn was connected to a GPS signal simulator at ESTEC. Thanks to this simulator, it was possible to reproduce in the realistic ESEO mission scenario in order to verify the capability of the receiver to work with Doppler frequencies typical of space missions. The test demonstrated the need for a setting of the receiving channel's frequency scanner, in order to directly address the receiver to search space frequencies and reduce first acquisition time. After the correct setting, the receiver was able to lock the signal of several satellites in view. From this moment on the receiver started tracking the satellites automatically and maintained the GPS link in time, setting the frequency to the correct values. The test was performed for several minutes and it demonstrated that, after the previous tracked satellites disappeared from the field of view, the receiver was able to automatically rearrange the channels to search and track new satellites with the right Doppler. Then several commands were sent to the receiver through the laptop, in order to validate the generated data about position and other mission-related values.
To verify the performance of the navigation algorithm in a real scenario, it was implemented and used to process GRACE-A raw observations. Although the GRACE receiver and orbit are substantially different from the ESEO ones, this verification was used to prove the correct design of the algorithm which can then be tuned to match the ESEO mission needs. The offline processing showed a positioning error of about 80 cm 3D RMS when using broadcasted GPS ephemeris and clocks. It is expected that the ESEO positioning error will be worse, between 1 and 1.2 meters, due to the lower quality of the receiver oscillator.
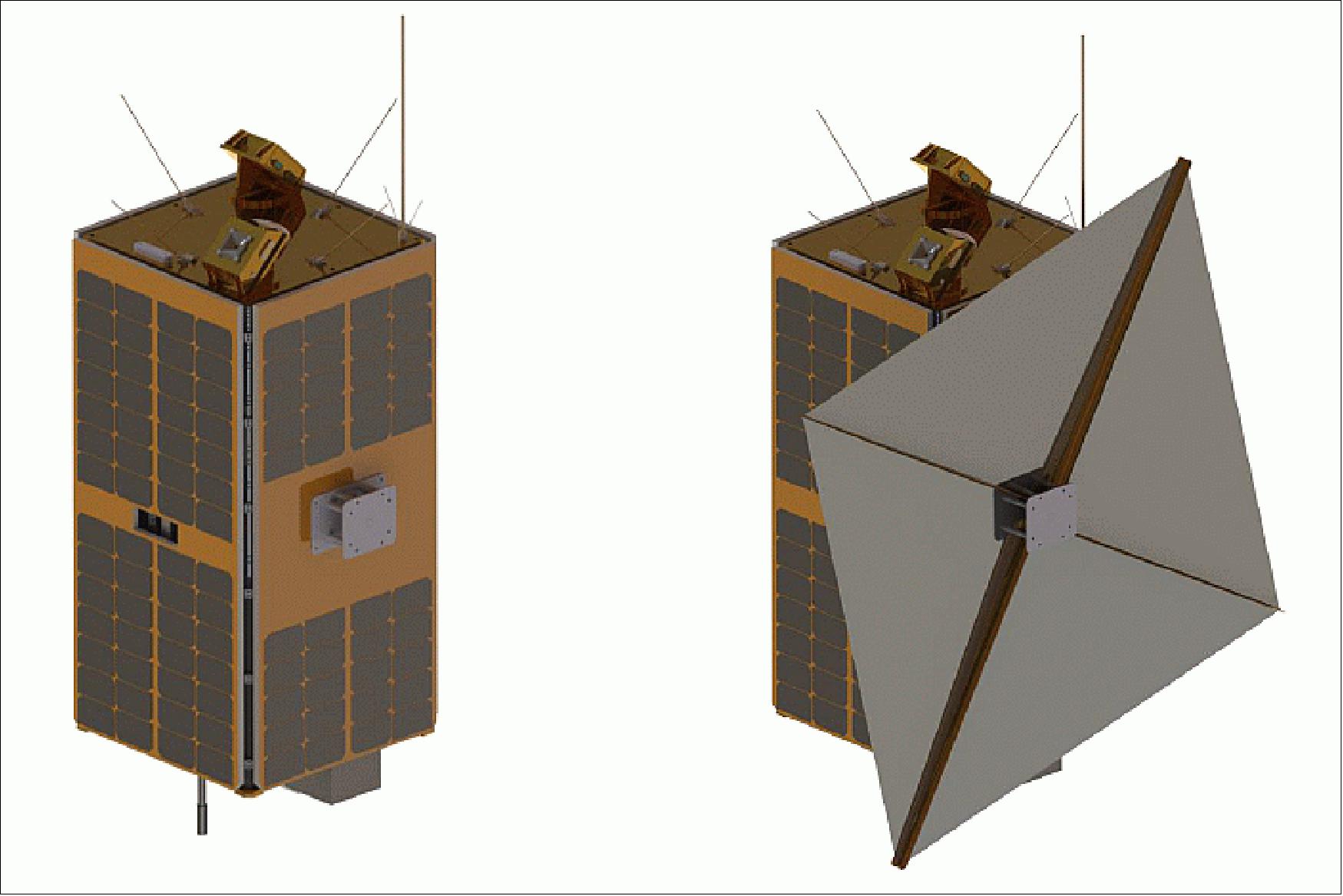
DOM (De-Orbit Mechanism)
The de-orbit mechanism is developed by the student team of Cranfield University, UK. The DOM assembly will be deployed at the end of the mission lifetime to enlarge the effective satellite area, thereby reducing the required de-orbiting time. In the case of the present device, this is achieved by deploying a sail which is attached to coilable boom arms. The boom arms as well as the sail are rolled up around a central spool in the middle of the device and held in position by three kevlar chords. Thus, the device is compactly stored in a single unit of 100 x 100 x 60 mm before actuation. On deployment, the kevlar chords are cut and the strain energy stored in the boom arms during the coiling process is transferred into kinetic energy about the central spool, resulting in deployment.
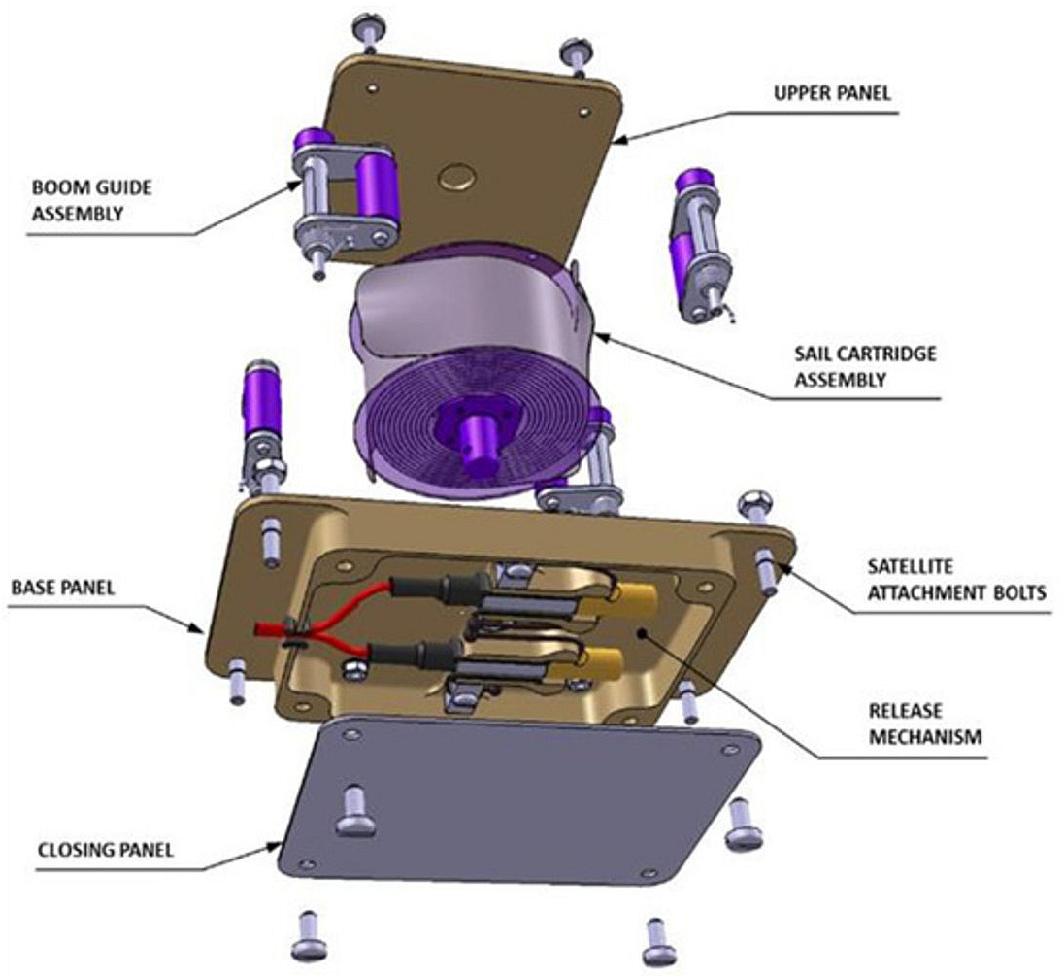
DOM is a drag sail technological demonstrator to accelerate its orbital decay and disposal via atmospheric burn-up on reentry. The design is based on the Cranfield Space Research Centre's experience in de-orbit sails (e.g. Icarus-1 on TechDemoSat-1, launched in 2014).
AMSAT Payload
The AMSAT UK team is composed of four students from the University of Surrey and two radio amateurs who collaborate with the Surrey Space Centre. Together they have developed a communications unit for ESEO that uses an L-band downlink to connect a global network of students and amateur radio users to a single ground station.
The objective of the AMSAT payload is to provide downlink telemetry that can be easily received by schools for educational outreach purposes and to encourage students to become interested in all STEM (Science Technology Engineering Mathematics) subjects. It will provide "signals from space directly to the classroom." This telemetry will be gathered by the payload monitoring all of the required telemetry packets being transmitted by the OBDH on the CAN bus or via a separate interface.
The project includes the development of a simple and cheap "ground station" operating on VHF frequencies in the Amateur Satellite Service. This station is an omnidirectional antenna feeding a FUNcube USB DonglePRO+ SDR receiver which will receive the signals directly from the satellite and transfer the data to a specially developed graphical software running on any Windows laptop. 30)

Using such equipment, the link budget will be sufficient to enable reception of signals at a satisfactory level on all passes where the elevation exceeds 15º. For radio amateur users, similar simple equipment will suffice to listen to the FM voice downlink. Those users who wish to use the FM transponder will require about 100 W EIRP, e.g. 10 W to an 8 element Yagi on the 1260 MHz uplink.
To display the telemetry, suitable display software will be developed together with a central data warehouse to enable schools to access data from prior orbits over the Internet. The AMSAT-UK team will also assist the development of the software for schools and support the creation of teacher aids and lesson plans to ensure the best possible benefits for school students.
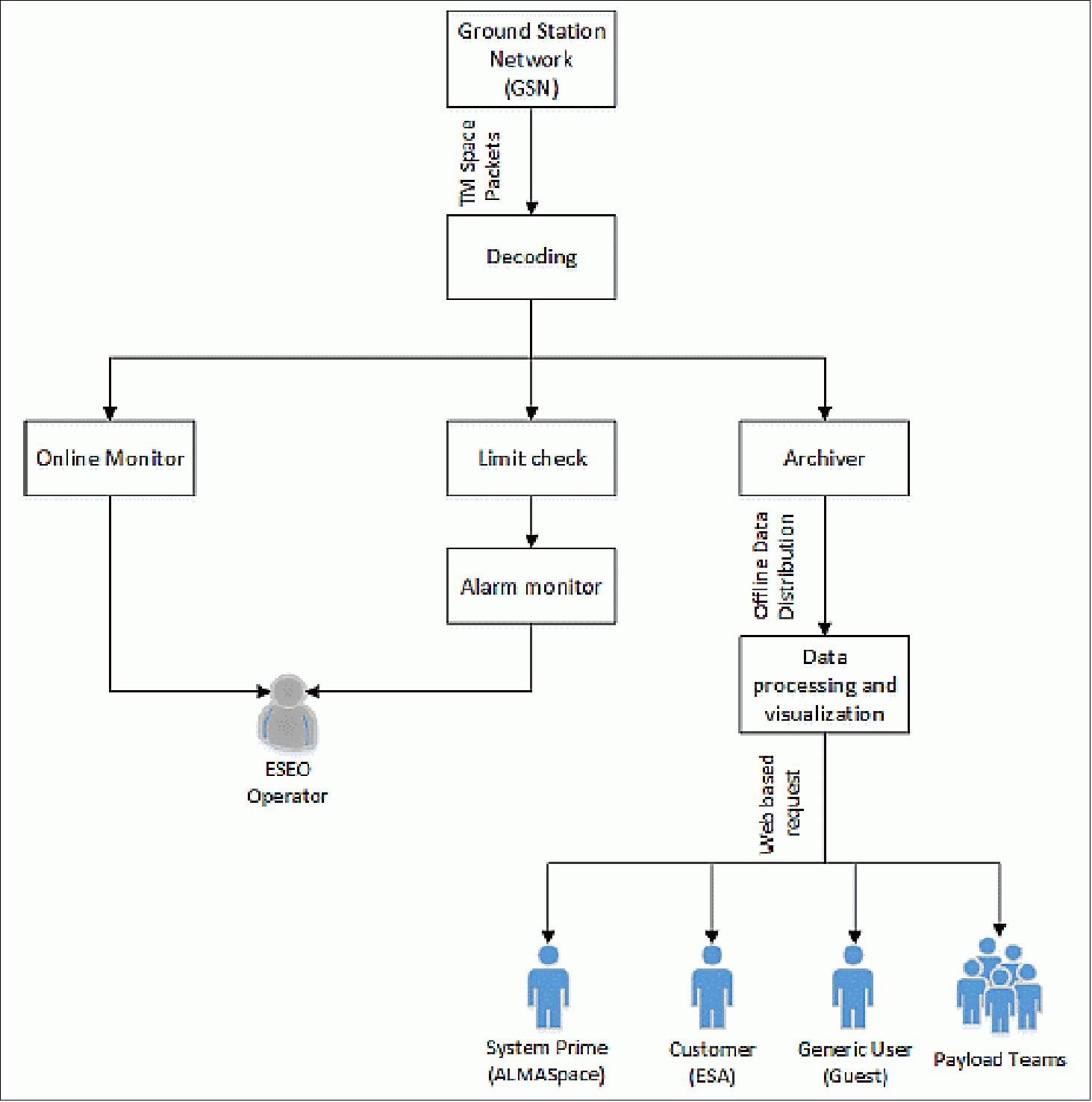
Ground Segment
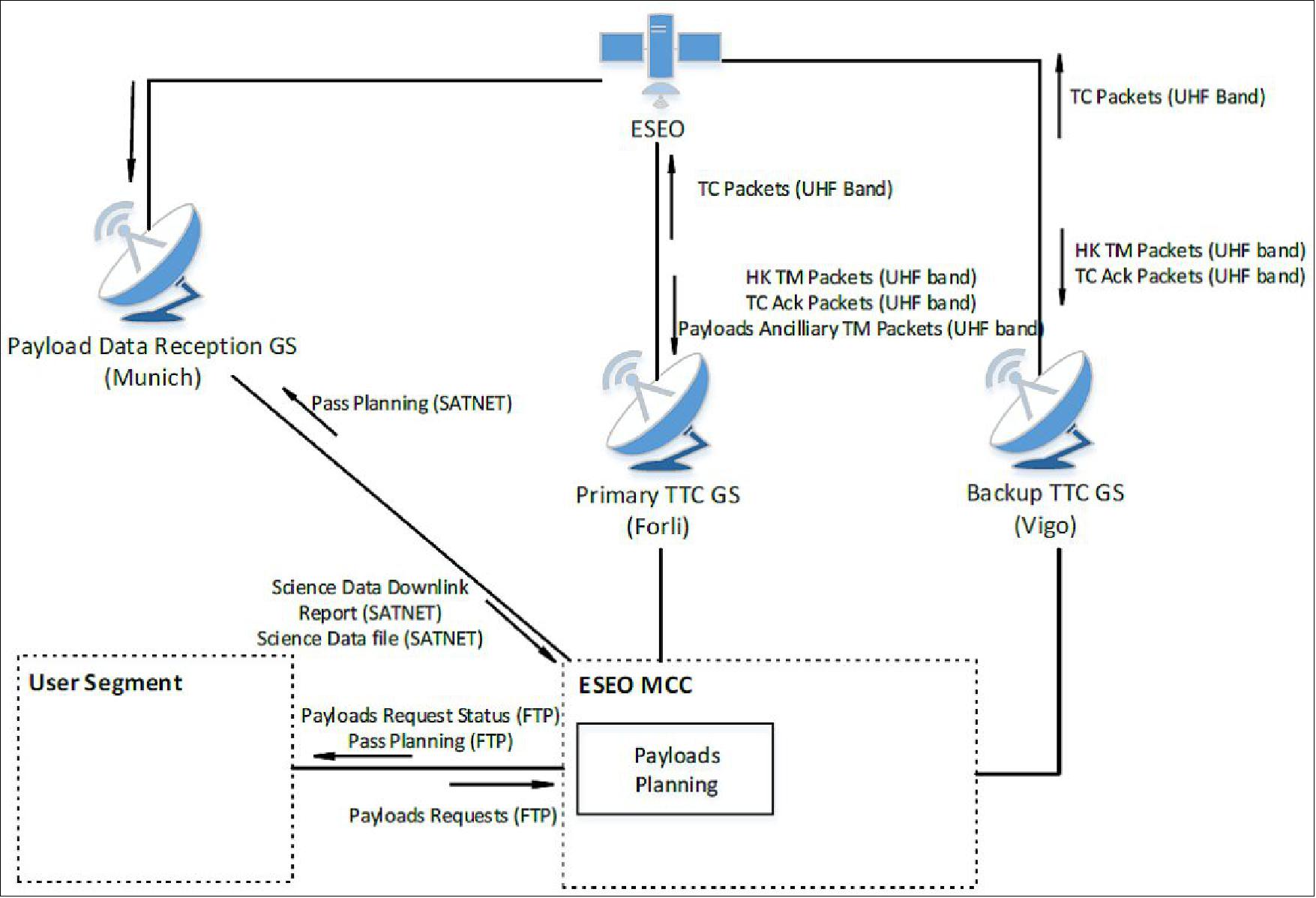
The ESEO ground segment basic functions necessary to establish reliable radio link for uplink and downlink communication for the ESEO mission are (Ref. 11):
1) Support to the space segment in terms of command and control of the satellite, monitoring of the telemetry data and management of the communication link. In particular, this is performed through a bidirectional link at UHF band.
2) Support to the space segment in terms of reception of the data collected by payloads on-board the spacecraft during the orbiting phase. In particular, this is performed through a downlink connection performed at S-band.
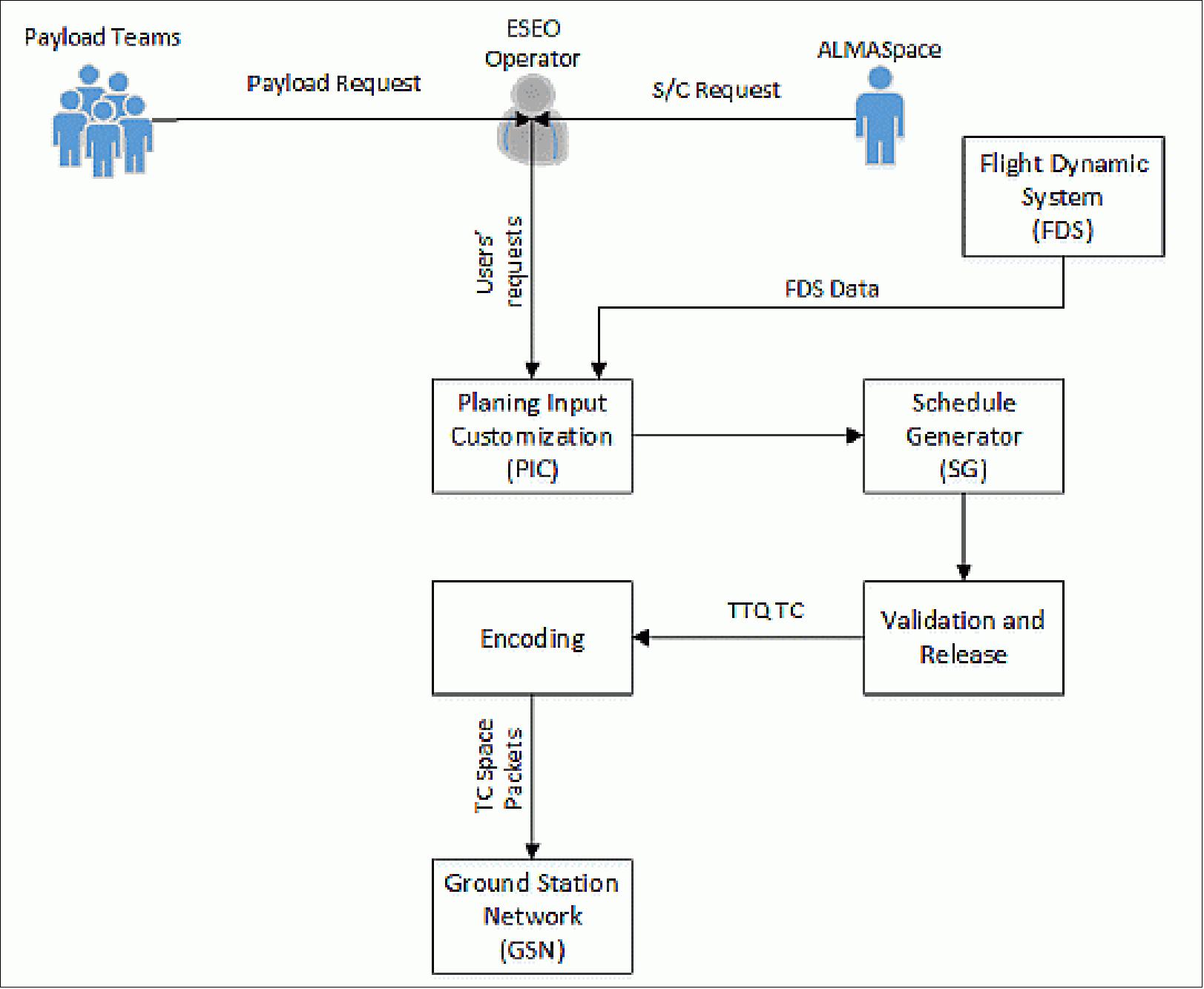
3) Management of the overall mission, in terms of planning of the activities problem/conflict solving, resource optimization, user priority handling.
4) Management of user requests, data acquisition, archiving and delivery of the data received from the ESEO satellite by means of co-located and/or remotely located acquisition stations.
The ground segment infrastructure comprises the following functional areas: Mission Exploiting Area and Mission Programming and Control Area. Each functional area is devoted to perform and exploit the ESEO mission from the ground segment side.
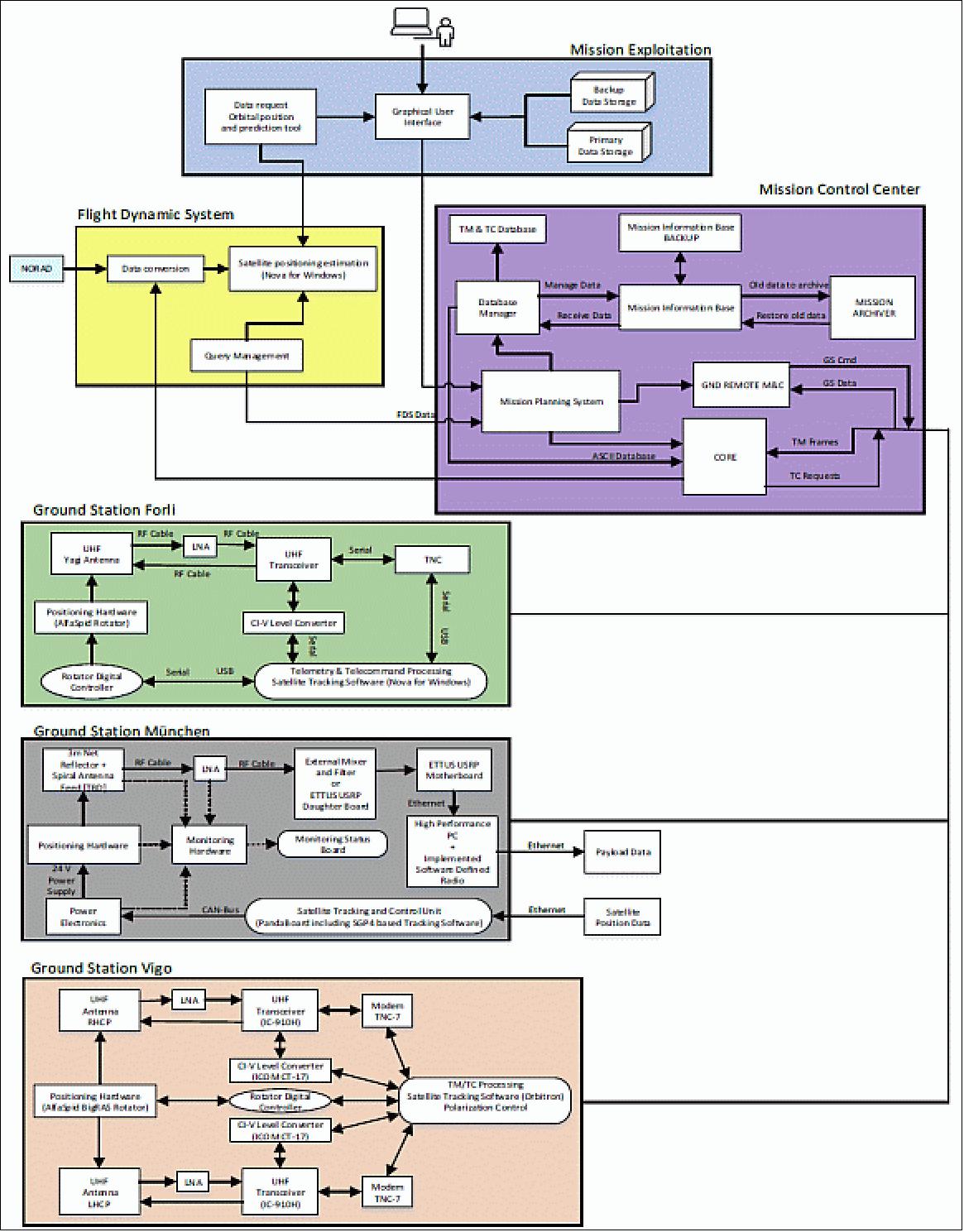
The mission exploitation area includes the Mission Exploitation System MIEX) and User Segment while the Mission Programming and Control Area includes the MCC (Mission Control Center), MPS (Mission Planning System), FDS (Flight Dynamics System) and the following ground stations:
• GSF (Ground Station Forlì), Bologna, Italy, as the main station for telemetry and command of the spacecraft at UHF. The team at the University of Bologna is setting up two facilities that will be part of the ESEO ground station network:
- A primary uplink and downlink ground station operating in the UHF amateur radio frequency band (430-440 MHz) using a 2 x 19 elements crossed Yagi antenna.
- A secondary, downlink-only ground station operating in the S-band (around 2.4 GHz) using a 3m diameter parabolic antenna.
Both ground stations are based on a Software Defined Radio (SDR), which allows for greater flexibility in the choice of the modulation scheme, communication protocol and digital signal processing. Both antennas will automatically track the satellite using the azimuth and elevation data computed from a two-line element (TLE) propagator.
• GSV (Ground Station Vigo), Spain, as a backup station for GSF. The equipment can receive and process VHF, UHF, S-band and L-band data. For the ESEO mission, a migration to an SDR-based ground station fully compatible with the one based in Forlì will be made. This will allow ESEO telecommands to be sent from both facilities.
• GSM (Ground Station Munich), Germany, dedicated to the reception of data collected by the on-board payloads at S-band. The Munich ground station is the primary payload ground station for the ESEO mission. In nominal operation, all scientific data generated on the satellite (e.g. images, measurements) are sent from the satellite to this ground station. During the passes of the satellite, its position will be computed based on an estimated orbit, and it will be continuously tracked by the ground station antenna. The signals received will need to be amplified and processed in order to be able to extract the payload data from the signal. This extracted data will have to be checked for consistency, and any errors will have to be corrected or at least detected before the data is forwarded to the scientific teams.
The Munich ground station consists of a 3m mesh reflector antenna that is mounted on a former industrial robot placed on the roof of the institute. The received signals are collected with a USRP software-defined radio, and further signal processing is performed on a PC. The control circuits and software needed to power the robot's engines, as well as the orbit propagation and the receiver software, is developed by the students. This allows the participating students to gain experience in a wide variety of engineering skills, from circuit design, soldering and PCB manufacturing, control theory, signal processing, communication protocols, system engineering and project management.
References
1) ESEO - The European Student Earth Orbiter, ESA, URL: http://esamultimedia.esa.int
/docs/LEX-EC/ESEO_fact_sheet_20080228.pdf
2) Francesco Emma, Javier Ventura-Traveset, Roger Walker, Helen Page, Carlos Lopez de Echazarreta, Thomas-Louis de Lophem, Matthew Cross, Per Berglund, Victor Nikolaidis, "ESA hands-on projects education strategy," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.E1.1.2
3) http://esamultimedia.esa.int/docs/edu/ESEO_fact_sheet_20090612.pdf
4) "Development of the ESEO student satellite gets under way," ESA, Dec. 9, 2008, URL: http://www.esa.int/SPECIALS/Education/SEMYQ2STGOF_0.html
5) E. Razzano, T. Lupi, P. Sabatini, "Micro-Satellite Platform with Building-Block Approach for Leo Missions," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
6) E. Razzano, T. Lupi, P. Sabatini, "Flexible Building-Block Architecture For LEO Microsatellite Platforms," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.7.5
7) "ESEO workshop begins reshaping at start of phase B2," ESA, Dec. 22, 2008, URL: http://www.esa.int/SPECIALS/Education/SEMYNCTTGOF_0.html
8) Paolo Tortora, Davide Bruzzi, Fabrizio Giulietti, Piero Galeone, "European Student Earth Orbiter: ESA's Educational Microsatellite Program," Proceedings of the 2nd IAA Conference on University Satellite Missions and CubeSat Workshop, IAA Book Series , Vol. 2, No 2, Editors: Filippo Graziani, Chantal Cappelletti, Rome, Italy, Feb. 3-9, 2013, IAA-CU-13-01-06
9) "ESA's Student Satellite Takes Important Step Towards Space," ESA, January 29, 2013, URL: http://www.esa.int/Education/ESA_s_student_satellite_takes_important_step_towards_space
10) Davide Bruzzi, Paolo Tortora, Fabrizio Giulietti, Piero Galeone, "European Student Earth Orbiter: ESA's educational Microsatellite Program," Proceedings of the AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-IX-3, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2974&context=smallsat
11) Davide Bruzzi, Paolo Tortora, Fabrizio Giulietti, Piero Galeone, Antonio De Luca, "The ESEO Development: Merging Technical with Educational Challenges," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
12) "European Student Earth Orbiter," ESA, URL: http://www.esa.int/Education/European_Student_Earth_Orbiter
13) Information provided by Paolo Tortora of the University of Bologna, Italy.
14) Davide Bruzzi, Nicola Melega, Paolo Tortora, Fabrizio Giulietti, Piero Galeone, Antonio De Luca, "The ESEO mission: current status and achievements," 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-0703, URL of presentation: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente
/archiv10/pdf/0703_ESEO_SSEO_Davide_Bruzzi.pdf
15) Piero Galeone, Antonio De Luca, Paolo Tortora, Davide Bruzzi, "The European Student Earth Orbiter," ESA Bulletin, No 163, 3rd quarter 2015, pp: 34-37, URL: http://esamultimedia.esa.int
/multimedia/publications/ESA-Bulletin-163/offline/download.pdf
16) Martijn Geers, Hans Kuiper, Daniel Choukroun, Manuel Salvoldi, Duarte Rondao, "A novel attitude quaternion filter for the ESA European Student Earth Orbiter (ESEO)," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-C1.IP.12
17) ESEO student satellite successfully launched to space," ESA, 3 December 2018, URL: http://m.esa.int/Education/ESEO/ESEO_student_satellite_successfully_launched_to_space
18) Stephen Clark, "Spaceflight's 64-satellite rideshare mission set to last five hours," Spaceflight Now, 3 December 2018, URL: https://spaceflightnow.com/2018/12/03/
spaceflights-64-satellite-rideshare-mission-set-to-last-five-hours/
19) Stephen Clark, "Spaceflight preps for first launch of unique orbiting satellite deployers," Spaceflight Now, 23 August 2018, URL: https://spaceflightnow.com/2018/08/23/
spaceflight-preps-for-first-launch-of-unique-orbiting-satellite-deployers/
20) Jeff Foust, "Spaceflight gears up for dedicated Falcon 9 launch," Space News, 6 August 2018, URL: https://spacenews.com/spaceflight-gears-up-for-dedicated-falcon-9-launch/
21) "Spaceflight SSO-A: SmallSat Express Mission," SpaceX, 3 December 2018, URL: https://web.archive.org/web/20181204085402/https://www.spacex.com/news/2018/12/03/spaceflight-sso-smallsat-express-mission
22) "The sun sets on ESEO as ESA's pioneering student satellite mission concludes," ESA / Education / ESEO, 4 December 2020, URL: https://www.esa.int/Education/ESEO/
The_sun_sets_on_ESEO_as_ESA_s_pioneering_student_satellite_mission_concludes
23) "ESEO mission updates," ESA, 23 May 2019, URL: http://www.esa.int/Education/ESEO/ESEO_mission_updates
24) "ESEO student satellite in-orbit commissioning has started!," ESA, 22 March 2019, URL: http://m.esa.int/Education/ESEO/ESEO_student_satellite_in-orbit_commissioning_has_started
25) "ESEO is alive and kicking!," ESA, 3 December 2018, URL: http://m.esa.int/Education/ESEO/ESEO_is_alive_and_kicking!
26) "The ESEO Mission," ESA, 28 September 2018, URL: https://www.esa.int/Education/ESEO/The_ESEO_Mission
27) ,Balazs Zabori, Attila Hirn, "TriTel 3 dimensional space dosimetric telescope in the European Student Earth Orbiter project of ESA," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.A1.4.4
28) Balazs Zabori, Attila Hirn, Tamas Hurtony, Agnes Gyovai, Sandor Deme, Tamas Pazmandi, Istvan Apathy, Antan Csoke, Peter Szegedi, Andras Gerecs, "TRITEL satellite version silicon detector telescope development for the ESEO spacecraft," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A1.5.12
29) Alessandro Avanzi, Alfredo Locarini, Paolo Tortora, "Real-time precise orbit determination of the ESA ESEO spacecraft," 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1405P
30) "AMSAT-UK to provide Amateur Radio payload for ESEO satellite," AMSAT-UK, Feb. 2, 2013, URL: http://amsat-uk.org/2013/02/02/amsat-uk-to-provide-amateur-radio-payload-for-eseo-satellite/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top