EnMAP (Environmental Monitoring and Analysis Program)
EO
Atmosphere
Aerosols
Land
Environmental Mapping and Analysis Program (EnMAP) is a German satellite mission, seeking to capture hyperspectral image data of the Earth’s atmosphere and surface. Launched in April 2022, the mission is managed by the German Aerospace Centre (DLR), with the German Research Centre for Geosciences (GFZ) leading the associated scientific research.
Quick facts
Overview
| Mission type | EO |
| Agency | DLR |
| Mission status | Operational (nominal) |
| Launch date | 01 Apr 2022 |
| Measurement domain | Atmosphere, Land |
| Measurement category | Aerosols, Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Trace gases (excluding ozone) |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, CH4 Mole Fraction, Volcanic ash, CO2 Mole Fraction |
| Instruments | HSI |
| Instrument type | Hyperspectral imagers |
| CEOS EO Handbook | See EnMAP (Environmental Monitoring and Analysis Program) summary |

Summary
Mission Capabilities
EnMAP carries a Hyperspectral Imager (HSI) on board, which is used to monitor atmospheric aerosol composition, the albedo and reflectivity of the Earth’s surface, and to track global vegetation coverage. HSI utilises a dual spectrometer instrument, allowing for observations in the visible and near-infrared (VNIR) and short-wave infrared (SWIR) spectrum.
Electromagnetic radiation enters via a calibration device, capable of standard observation and launch protection modes. A field splitter directs the observation field of the telescope and redirects the VNIR and SWIR beams into their respective units. A Spectralon diffuser is also present for enhanced calibration.
Performance Specifications
HSI operates as a pushbroom imager, observing over a spectral range of 430 - 2450 nm and providing global coverage. EnMAP samples 228 spectral bands, with intervals of 6.5 nm and 10 nm in the VNIR and SWIR channels, respectively. Ground spatial resolution is 30 m and the maximum swath width is 30 km.
The EnMAP satellite operates in a sun-synchronous orbit, with a repeat cycle of 27 days and target revisit time of approximately 4 days. It operates at an altitude of 653 km and inclination of 98°, equating to a period of 97 minutes.
Space and Hardware Components
EnMAP’s early operational life will see it act as a science and research mission minisatellite, with its latter years dedicated to acting as a pathfinder for transitioning into commercial service.
German satellite manufacturer, OHB, designed the EnMAP spacecraft based off the LEOBus-1000, their generic bus designed for Earth observation (EO) missions. The sole method of communication is via radio frequency, with payload data transmitted in X-band at a data rate of 320 Mbit/s. Telemetry, Tracking, and Command (TT&C) is issued over the S-band, achieving a downlink data rate of 32 kbit/s, and an uplink of 4 kbit/s. The S-band antennas are designed to operate omnidirectionally, in order to maintain an uninterrupted TT&C link.
EnMAP’s first photos were received four weeks after launch, in May 2022. With satellite operations proven to be safe and X-band downlink established, the next step involves activating the thermal control system for the SWIR camera.
EnMAP (Environmental Monitoring and Analysis Program)
Spacecraft Launch Sensor Complement Ground Segment References
EnMAP is a next-generation German satellite program (an approved program as of March 2006). The objective is to provide for detailed monitoring (relevant surface parameters), characterization and parameter extraction of rock/soil targets, vegetation, and inland and coastal waters on a global scale. The mission requirements call for Earth observation with a dedicated hyperspectral pushbroom imager on a polar orbiting state-of-the art small satellite platform. The mission is being developed within a national context, with an international scientific focus, and also a strong commercial component aiming at the support of Copernicus -related services, a European initiative. 1) 2) 3) 4) 5) 6) 7) 8) 9)
The EnMAP long-term program is based on a cooperative approach involving various German institutions, the main participants are: DLR (German Aerospace Center, ground segment project management), GFZ (Deutsches Geoforschungszentrum, science lead). In November 2006, DLR awarded a design contract to Kayser-Threde GmbH of Munich, Germany, as prime contractor of EnMAP. The platform provider, OHB System, Bremen, was in this arrangement a subcontractor to Kayser-Threde. 10) — However, in June 2007, OHB Technology AG of Bremen acquired the company Kayser-Threde, so that the prime industrial contractor is now OHB.
The overall objectives of the mission are:
• To provide high-spectral resolution observations of biophysical, biochemical and geochemical variables in the spectral range of 420-2450 nm in continuous bands of 6-14 nm width, sampled at 5-12 nm intervals. The GSD (Ground Sampling Distance) will be 30 m.
• To observe and develop a wide range of ecosystem parameters encompassing agriculture, forestry, soil/geological environments, and coastal zones and inland waters
• To acquire high resolution spatial and spectral data from space that will enable/improve the retrieval of quantitative parameters needed by the users and are not provided by operating multispectral sensors
• To provide high-quality calibrated data and data products to be used as inputs for improved modelling and understanding of biospheric/geospheric processes. This will further contribute to the assimilation of data/information into such process models.
• To develop and market high-level data products, meeting the demands of the stakeholders in natural resource management.
Applications: The analysis spectrum of the EnMAP hyperspectral data covers the following disciplines: agriculture/forestry, biodiversity, ecology, wetlands, climate change, water, soils/land degradation, geology/mineralogy, arid zones, cartography, urban areas, fisheries, methodic development, calibration/validation.
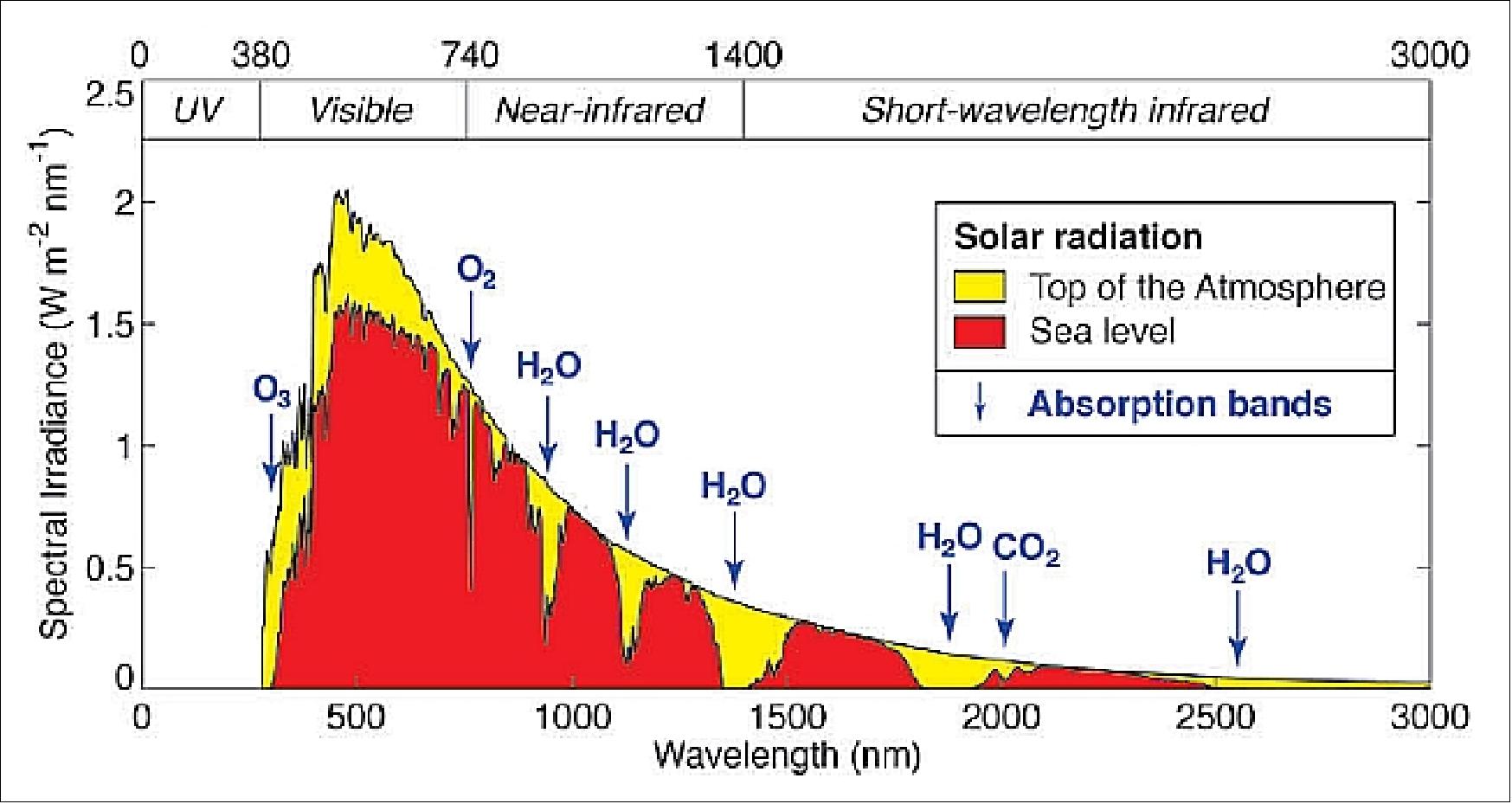
Some of the most significant absorption features occur between wavelengths of 400 nm to 2500 nm, where reflected solar radiation dominates the natural electromagnetic spectrum (Figure 2). These absorption characteristics can vary in their spectral depth, width, and location and therefore serve as diagnostic indicators, which enable us to characterize vegetation conditions to detect water constituents, or to identify mineral assemblages. 12)
For geologic applications imaging spectroscopy is used to map Earth’s surface composition (in terms of mineralogy or lithology) and for the quantification of rock and soil chemistry and physics based on spectral absorption features. Reflectance spectra of minerals are dominated in the VNIR wavelength range (400-1200 nm) by the presence or absence of transition metal ions (e.g., Fe, Cr, Co, Ni) resulting in absorption features due to electronic processes. The presence or absence of water and hydroxyl, carbonate and sulphate determine absorption features in the SWIR region (1400-2500 nm) due to vibrational processes. These phyllosilicates, sorosilicates, hydroxides, sulphates, amphiboles and carbonates are widespread components of the Earth surface. The absorption band depth is related to grain or particle size, as the amount of light scattered and absorbed by a grain is dependent on grain size. In general, absorption band depth is correlated with the (relative) amount of material present. Based on relative absorption depth, for example, it has been shown that kaolinite and organic carbon content can be derived with an accuracy of about 2% by weight.
Soils are highly variable, dynamic components of the environment and are essential for ecosystem functions. Soils comprise a major repository for biospheric carbon, and organic matter in the topsoil. The degree to which these components are present or absent in the topsoil provide a good indication of soil quality, soil erosion, and physical processes such as hydraulic conductivity and soil aggregation.
In general, soils, like plants, have only a few recognizable narrow absorption features. Soils typically have broad, shallow absorption features related to iron oxides and organic matter at wavelengths between 400 and 2500 nm (Figure 3). Reflectance decreases as organic matter increases. Ferric or ferrous iron causes absorptions in the visible and near-infrared spectra, particularly around 860 nm. In contrast to organic matter and iron oxides, various clay minerals (e.g., montmorillonite, kaolinite, illite, smectite) and carbonates have distinctive narrowband absorptances in the shortwave-infrared region between 2000 and 2500 nm. However, hyperspectral quantification of soil properties is only suitable in landscapes with low vegetation cover.
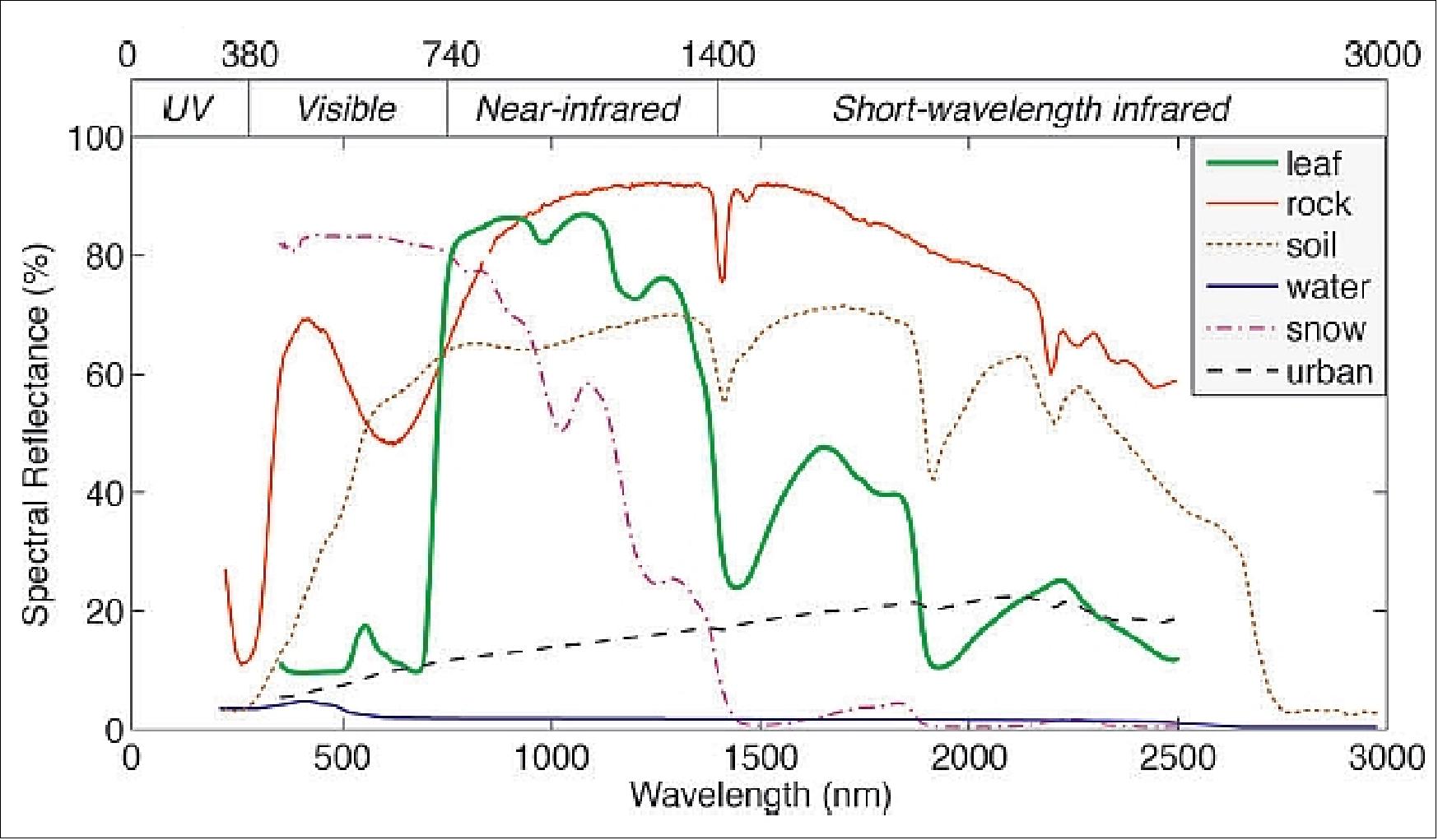
Legend to Figure 3: Reflectance data are derived from the USGS Digital Spectral Library. 13). The laboratory measurements represent samples of an oak leaf from Colorado (leaf), Aventurine quartz from India (rock), Montmorillonite and Illite from Virginia (soil), seawater from the Pacific Ocean (water), fresh snow from Colorado (snow), and black road asphalt from Colorado (urban).
EnMAP has the capability to detect individual absorption features in the spectra of many materials, solids, liquids, or gases. Actual detection depends on the instrument's spectral coverage, spectral resolution, spectral sampling, signal-to-noise ratio, the abundance of the material, and the strength of the material’s absorption features in the wavelength region measured. The spectral molecular absorption, and scattering properties of materials, form the basis for the identification and determination of the abundances of surface and atmospheric constituents. Accordingly, research and development efforts within the EnMAP mission employ these fundamental spectral characteristics as a basis for the extraction of information from spaceborne hyperspectral data (Ref. 12).
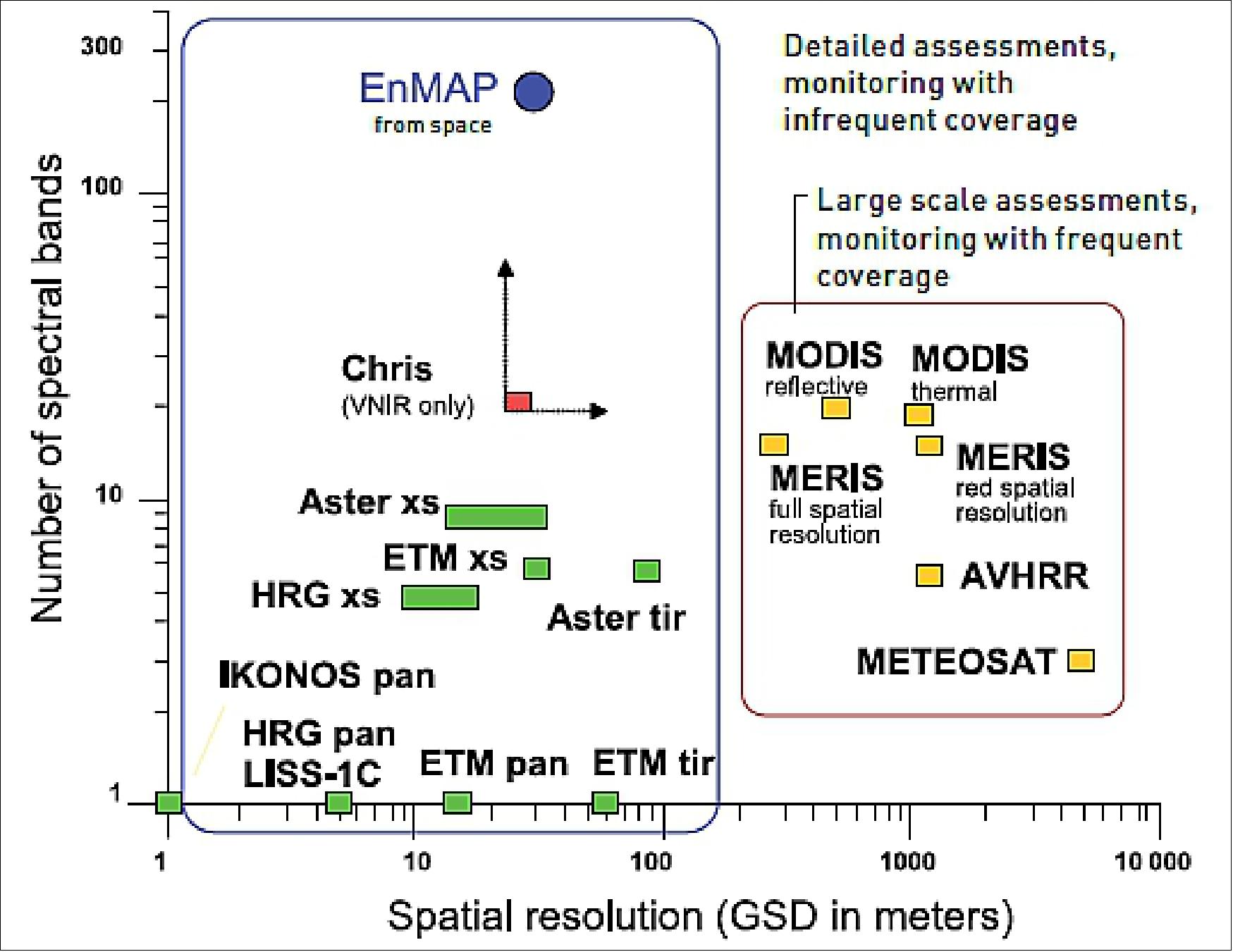
Performance: Figure 4 shows EnMAP, characterized by resolution capability and number of spectral bands compared to other multispectral and hyperspectral systems. EnMAP enables the global retrieval of ecosystem parameters with high spectral and spatial resolution with a simultaneously high repetition rate. It provides unique data which is due to its outstanding performance compared to all existing similar satellite systems. The hyperspectral data of EnMAP not only provide new answers to current scientific problems; but also have a huge potential for several future service applications.
Spacecraft
The EnMAP minisatellite is conceived as a science and research mission and a pathfinder to evolve towards an operational/commercial service (the 2nd S/C in the program is targeted for support of commercial services). The spacecraft platform design is based on existing state-of-the art bus technology of OHB-System (SAR-Lupe heritage). OHB refers to its generic spacecraft bus as LEOBus-1000. The LEOBUS-1000 is designed for Earth observation missions with a launch mass of 600 - 1000 kg; its advantages are a very modular and flexible configuration for power generation, a highly accurate and agile attitude and orbit control concept and a high payload data-rate on-board processing and downlink system. 15)
Its key design features are a very modular and flexible configuration approach, a very precise attitude control concept implementation, and the provision of high-rate onboard processing and downlink transmission services of the payload data. 16) 17) 18) 19) 20)
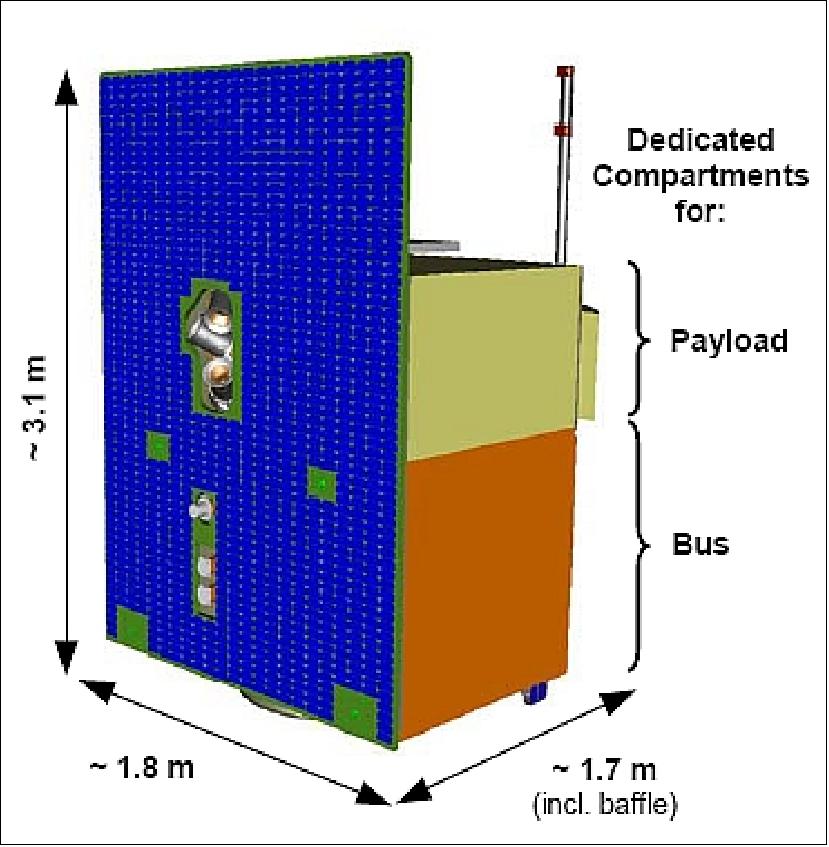
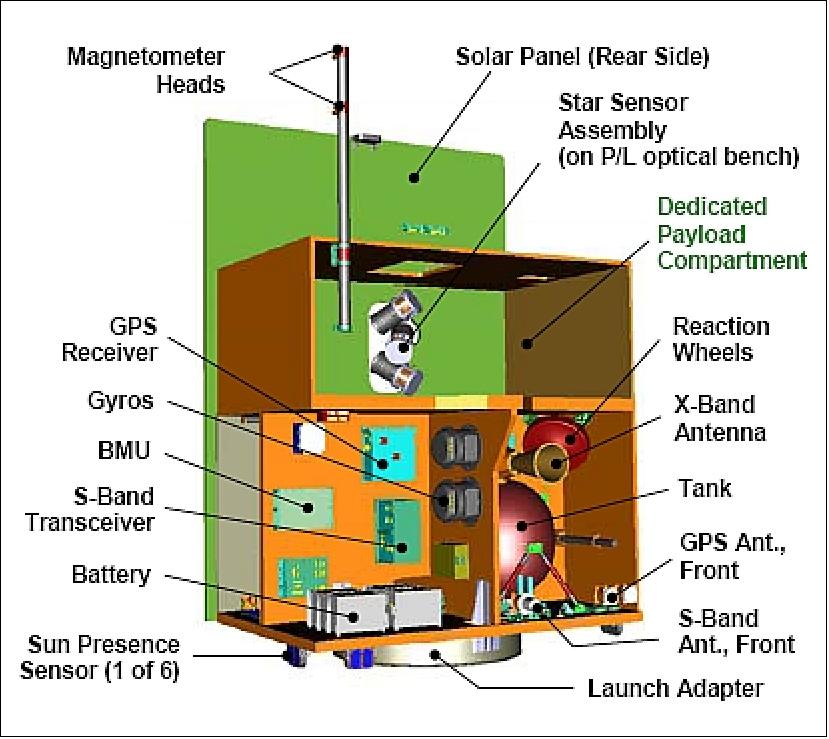
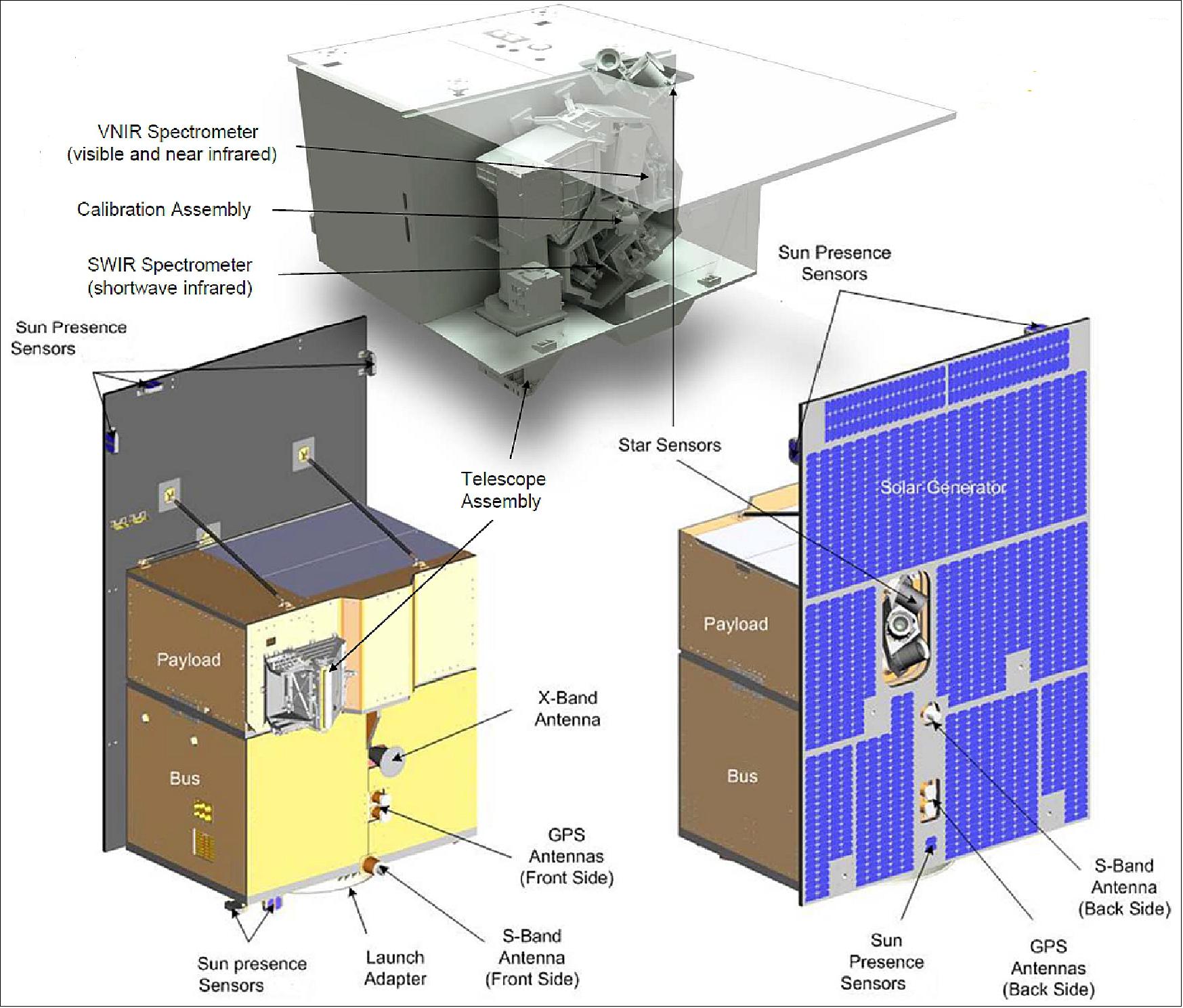
The EnMAP spacecraft consists of two major modules: the bus or service module with the subsystems (at the bottom part of Figure 5) and the payload module, accommodated in the upper part of the spacecraft to comply with high stability and thermal requirements of the optical instrumentation. The payload module can be thermally decoupled from service subsystems to minimize heat fluxes.
Spacecraft bus | LEOBus-1000 |
Spacecraft mass budget | < 980 kg (wet mass) |
Spacecraft structure | Al sandwich panel concept with internal shear frame |
Spacecraft size | Bus compartment: 3.1 m x 2.0 m x 1.7 m (without solar panel and appendages) |
TCS (Thermal Control Subsystem) | Passive cooling of electronics with heat pipes and radiator surfaces, active temperature control of the OCS, active survival heating for P/L after recovery from safety mode |
EPS (Electric Power Subsystem) | 31 V (nominal) |
OCS (Orbit Control System) | Hydrazine blow-down system |
AOCS (Attitude & Orbit Control Subsystem) | 3-axis stabilization |
AOCS modes | - Normal attitude control mode (sun pointing) |
Onboard performance requirements: |
|
Spacecraft design life | ≥ 5 years (on orbit) |
OCS (Orbit Control Subsystem) | - Hydrazine blow-down system, - Propellent: 70 l of fuel capacity |
The spacecraft is 3-axis stabilized. The attitude is sensed by 3 sun sensors, gyroscopes, magnetometers, and sun presence sensors. Actuation is provided by reaction wheels (4) and magnetic torquers. The required attitude accuracy is < 500 m with a knowledge of < 100 m.
The spacecraft mass is < 970 kg, the design life is 5 years. EnMAP features the capability of cross-track body pointing of ± 30º (providing an accessible target range of about ± 390 km). The pointing feature allows a target revisit within about 4 days (depending on latitude).
The EPS (Electrical Power Subsystem) consists of the following elements: SG (Solar Generator), battery, and BMU (Battery Management Unit). The panel of the body-mounted SG (4.6 m2) is made of lightweight aluminium honeycomb structures selectively supported by dedicated CFRP elements. The SG uses triple-junction solar cells providing ~810 W of average power at EOL. The SG accommodates dedicated sun presence sensors, GPS and S-band antennas, and payload sun calibration can be performed through dedicated panel cutouts. A Li-ion battery is used with a capacity of 50 Ah. The battery provides an energy density of 113 Wh/kg, where voltage ranges from 20-34 V can be achieved. The BMU supervises all battery-relevant parameters and autonomously protects the battery in case of fatal software malfunction.
TCS (Thermal Control Subsystem). The regulation of the thermal environment within the spacecraft bus (service module) is primarily achieved by means of passive thermal control measures, such as multilayer insulation (MLI) blankets and heat pipe assemblies. Active thermal control of the satellite bus is only required for the OCS components. Hence, the propellant tank, valves and filters are equipped with heating foils to avoid propellant freezing in orbit during critical mission phases.
The EnMAP bus is equipped with an OCS (Orbit Control Subsystem) comprising the following functional components:
• Hydrazine blow-down system
• Propellant tank with at least 50 kg capacity
• 2 thrusters, each with a 1 N thrust
• Pressure and electrical components (such as valves, filters, transducers, etc.)
The OCS provides for nominal orbit acquisition (early orbit maneuvers) and general orbit maintenance.
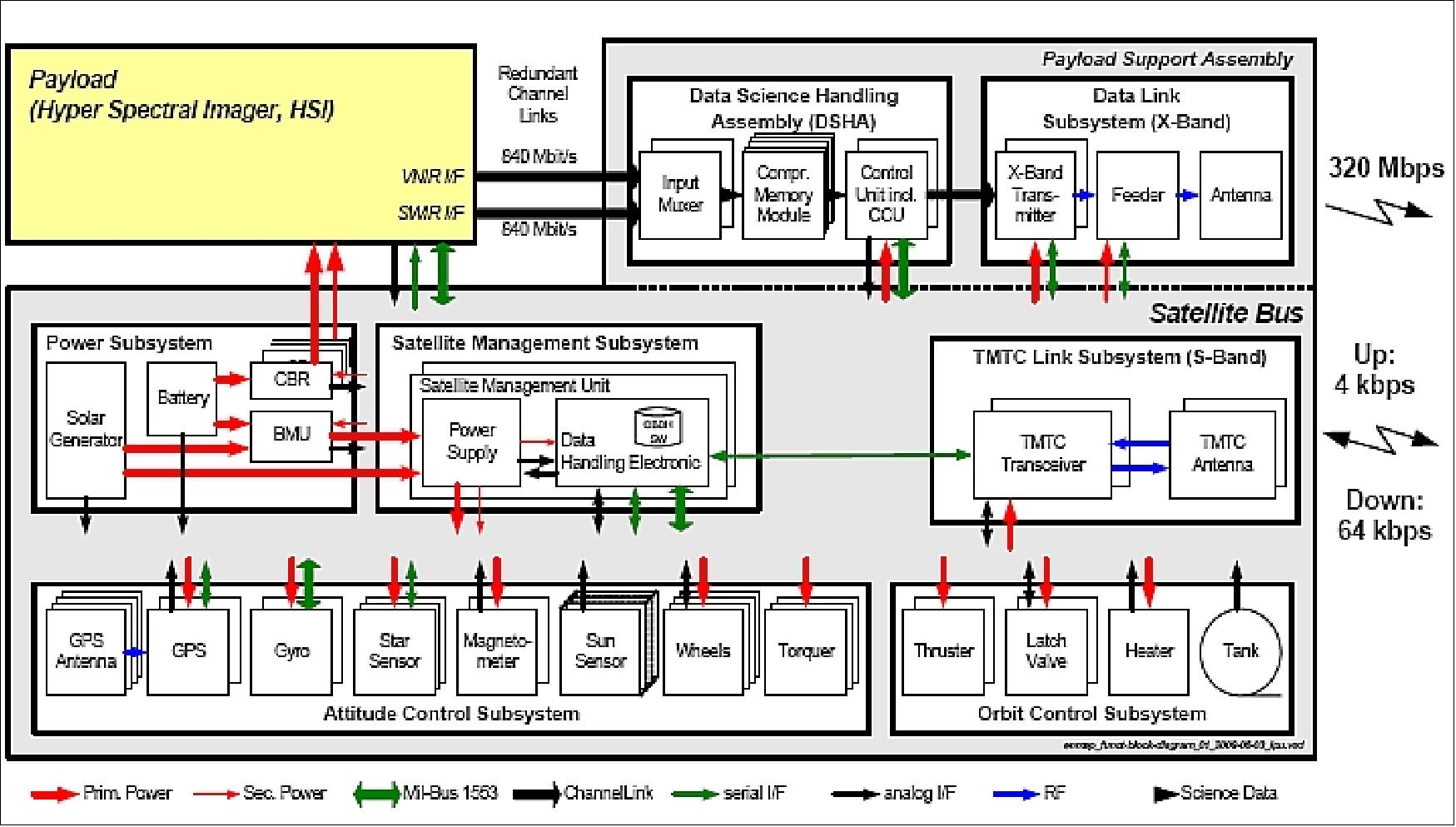
RF communications: The payload data are transmitted in X-band (8.2 GHz) at a data rate of 320 Mbit/s. A high-speed onboard mass memory of 512 Gbit (EOL) is provided. The telemetry channel coding unit conforms to CCSDS standards. Onboard storage capacity = 512 Gbit. - The S-band with full duplex services (2.2 GHz) is being used for TT&C communications. The downlink data rate is 32 kbit/s, the uplink is 4 kbit/s. The TT&C unit consists of two S-band transmitters and receivers, each operated in hot redundancy. The S-band antennas provide an omnidirectional antenna pattern to ensure the availability of the TT&C links (independent from the actual S/C attitude).
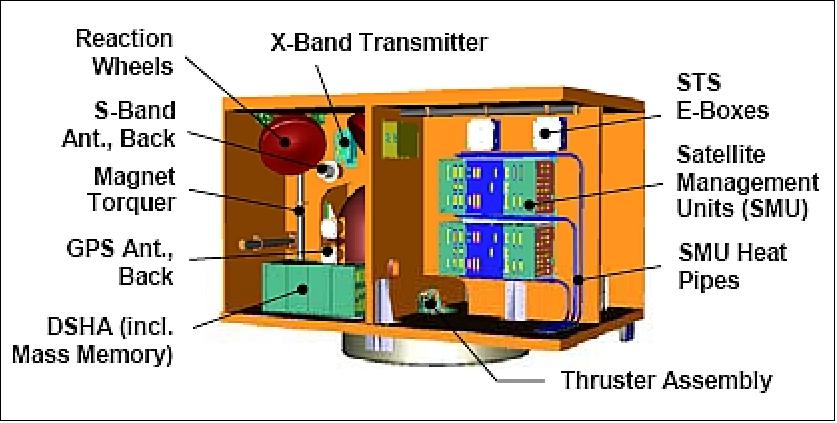
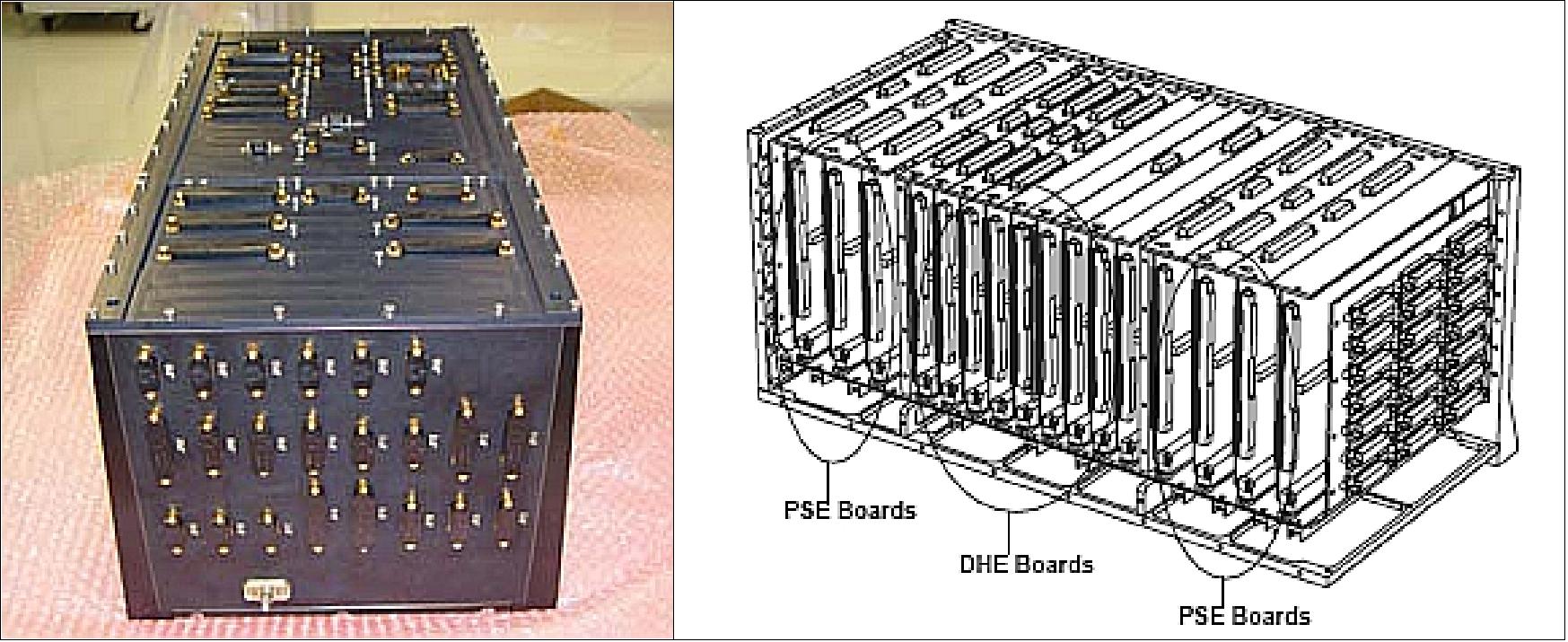
SMS (Satellite Management Subsystem): The bus SMS consists of two identical SMUs (Satellite Management Units) and the OBDH (On-board Data Handling software). A single SMU includes the data handling electronics boards and the power supply electronic boards. These PCBs (Printed Circuit Boards) are integrated in one electronic box with one common backplane (Figure 10).
The SMU interfaces and controls all electronic subsystems of the satellite by onboard autonomy. The power supply electronics supplies the data handling electronics and provides power distribution to the subsystems. The data handling electronics controls the power electronics and acquires the housekeeping data.
The redundancy is realized by the use of two SMUs as part of the SMS. In nominal operations, one SMU is operated and the other is in standby mode. The telecommand decoder of both SMUs are always switched on. The SMU provides one (redundant) MIL-1553B bus. This interface is used for command and telemetry transfers between the SMU and especially the payload and payload data handling subsystems.
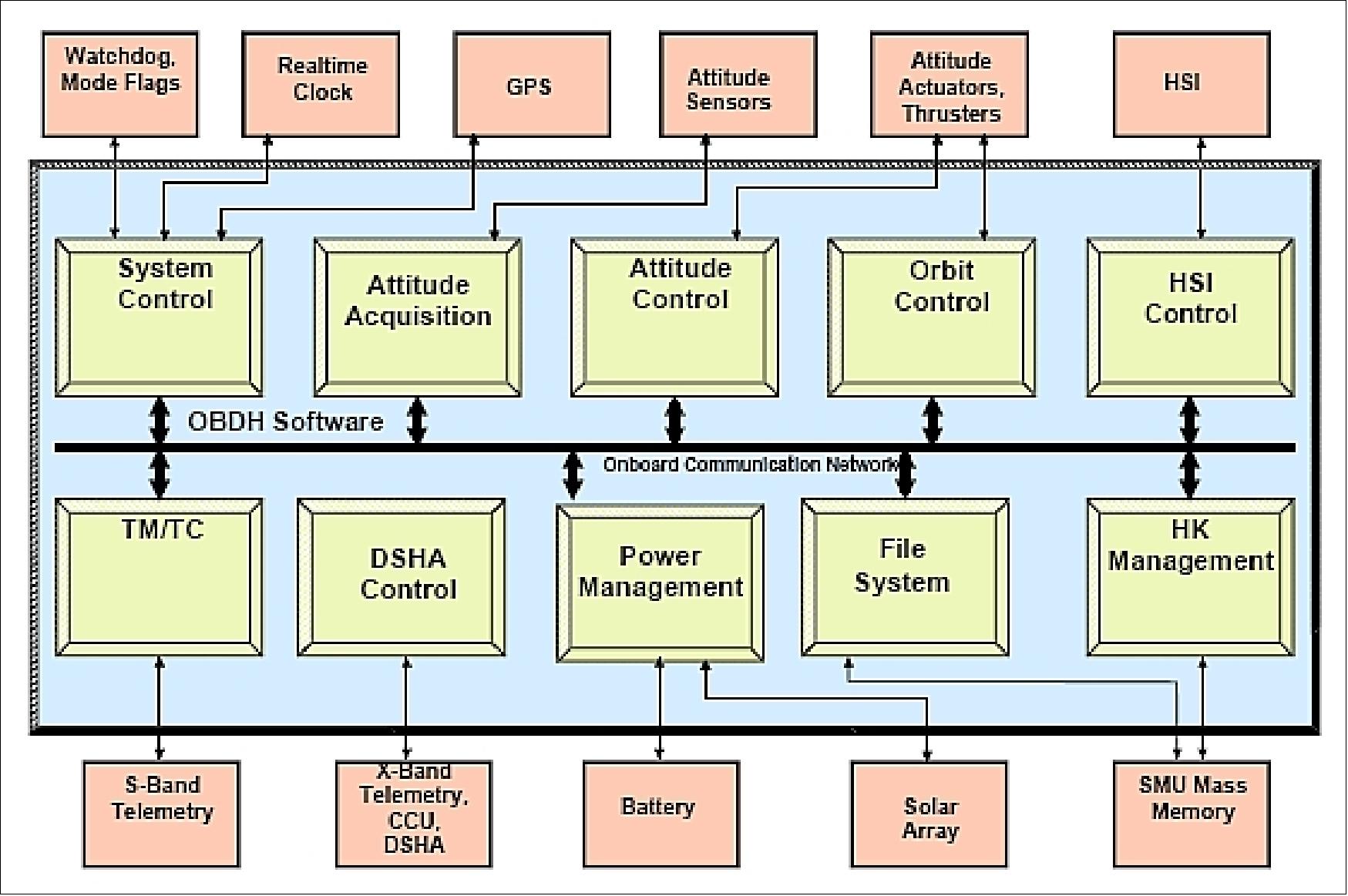
The SMU hosts the OBDH S/W, which is running on a single radiation hardened DSP (Digital Signal Processor). The OBDH S/W is able to perform all required tasks to control and monitor the complete EnMAP satellite. The overall architecture of the OBDH software including the attached hardware subsystems is shown in Figure 11.
On the bus level, the following modes are implemented:
- Nominal mode
- Safety mode, including the autonomous FDIR (Failure Detection, Isolation and Recovery) functions.
The OBDH is designed in such a way that the satellite can nominally be operated from the ground with a minimum operational effort. Specific tasks such as data takes are commanded by Time-tagged Telecommands, which contain all information to execute the addressed task autonomously. State-of-the-art authentication methods are implemented for satellite commanding and control.
AOCS (Attitude Orbit and Control Subsystem): The AOCS provides highly accurate and reliable attitude control capabilities as required for optical and microwave instruments performing Earth observing applications. To fulfil the requirements for various operational tasks, different AOCS modes are implemented, which are:
- Init mode: Check out of basic functionality of the AOCS elements according to a defined sequence of activities.
- Nominal (or Normal) mode: 3-axis autonomous attitude control with the solar generator pointing to the sun; AOCS standard operational mode.
- Precise mode: Most accurate attitude performance is provided; in this mode the attitude of the satellite is maneuvered according to dedicated attitude profiles in order to carry out specific tasks.
- Emergency mode: Spin-stabilized coarse sun pointing in case of critical anomalies.
The specific tasks of the spacecraft and especially of the payload are commanded by means of time-tagged telecommands (TTTC). If a specific AOCS pointing is required, the TTTC always includes a so-called AOCS guidance list, which represents the required AOCS pointing profile in form of attitude quaternions. The AOCS on-board software will then process the information contained in the uploaded list and will reconstruct (by means of interpolation) the complete guidance profile originally computed on the ground.
Using this guidance concept, the satellite bus is able to perform different precise pointing attitudes and profiles, such as the following, which are required during the EnMAP mission:
• Standard ground observation: Pushbroom attitude profile with up to ± 30º across-track pointing
• Payload calibration maneuvers: Deep space pointing or direct sun pointing (of the HSI sun calibration port)
• X-band downlink: Ground station pointing (of the high gain antenna)
• OCS maneuver: Attitude or inclination control maneuvers for accurate orbit acquisition and maintenance.
High-rate On-board Data Handling: The payload data handling comprises highly-efficient and reliable components that are capable to process optical Earth observation payload data with its typical high rates and volumes requiring minimum resources.
The following subsystems are part of the EnMAP payload data handling:
- DSHA (Data Science Handling Assembly), which includes high rate input multiplexer, mass memory and channel coding unit, conforming with CCSDS standards
- X-band transmitter, performing data modulation and providing the RF signal
- High gain antenna.
The DSHA interfaces to the HSI payload via two redundant channel links, each of which is operating at a data rate of 840 Mbit/s, i.e. the complete input data rate of the DSHA is 1680 Mbit/s. One highlight feature of the DSHA is the thematically sorting of the hyperspectral data into files, where one file includes the data of one channel per image only. This unique file handling concept significantly eases the downlink and the further processing of the payload data on ground. The channel files are stored within the mass memory of the DSHA, which has a capacity of 512 Gbit (EOL).
For data transmission a high gain antenna is used, which ensures the high transmission rate with sufficient link margin. This concept has the drawback, that the downlink requires a dedicated AOCS pointing maneuver, during which no imaging can be performed. To overcome this drawback, a lossless data compression is implemented within DSHA, which enables a compression ratio for the hyperspectral data of at least 1.6. Due to this, only the night time contacts with the X-band ground station in Neustrelitz are sufficient to dump the complete EnMAP payload data, which is sampled during one day (ca. 600 Gbit).
Development Status
• December 17, 2021: The EnMAP (Environmental Mapping and Analysis Program) hyperspectral satellite has achieved a significant milestone after completing successful environmental testing at the IABG test center in Ottobrunn, Bavaria. Further functional assessments at the OHB headquarters in Bremen have verified the satellite's full operating capabilities, preparing it for its imminent journey into space. EnMAP, developed by OHB System AG on behalf of the German Space Agency at DLR, aims to provide crucial insights into the Earth's ecosystems and support climate protection initiatives. Scheduled for launch aboard a SpaceX Falcon 9 in April 2022, EnMAP will operate in a solar-synchronous orbit around the Earth, capturing spectrally high-resolution images across various segments, including visible light and the short-wave infrared spectrum. The project, led by the German Space Agency at DLR, encompasses a collaborative effort among several institutions and organizations, emphasizing the mission's scientific and operational significance for environmental research and protection. 21) 22)
Launch
EnMAP of DLR/GFZ was launched on the Transporter-4 dedicated rideshare mission of SpaceX on 1 April 2022 at 12:24 EDT (16:24 UTC) on a SpaceX Falcon 9 Block 5 vehicle from SLC-40 at Cape Canaveral Space Force Station, placing one relatively large satellite (EnMAP) and dozens of smallsats into low Earth orbit. 23) 24)
The rocket’s booster landed on a droneship in the Caribbean near the Bahamas, because of the southerly trajectory taken by the booster, at almost the exact time the upper stage reached orbit. The upper stage initially entered a sun-synchronous orbit at ~650 kilometers, deploying three satellites, then maneuvered to 500 kilometers using two additional burns of the upper stage engine before deploying the remaining payloads.
The mission, called Transporter-4 by SpaceX, was the fourth in a series of dedicated rideshare missions designed to carry a large number of smallsats at relatively low prices. Unlike the previous three missions, which in some cases carried more than 100 satellites, SpaceX states there were only 40 satellites on this mission. One reason for the smaller number was the size of EnMAP payload, which had a mass of nearly 1000 kg at launch.

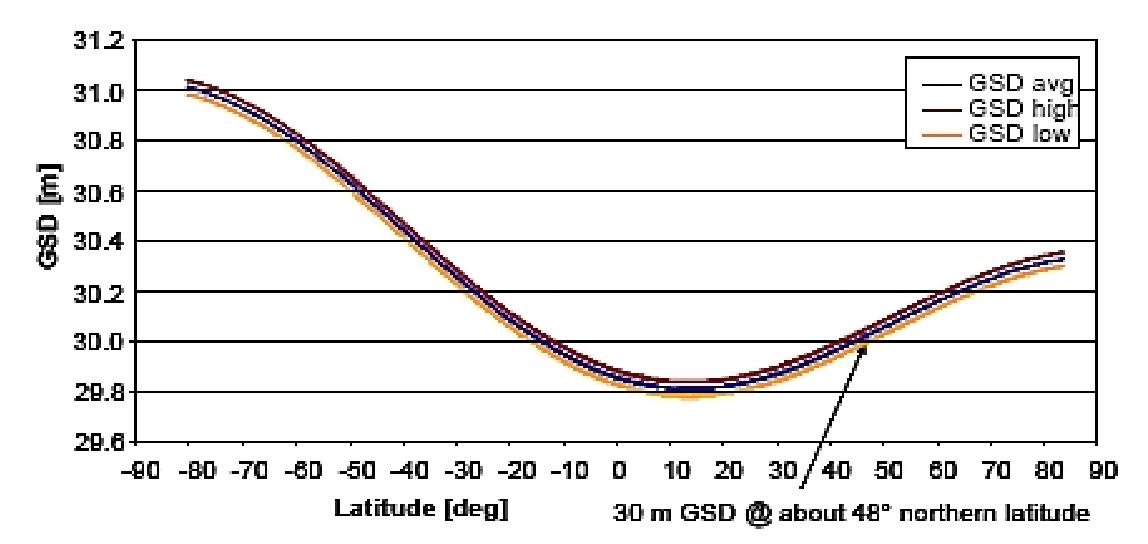
Orbit of EnMAP: Sun-synchronous orbit, altitude = 653 km, inclination = 98º, period = ~97 minutes. LTDN (Local Time on Descending Node) at 11:00 hours ±18 min, repeat cycle = 27 days (398 revolutions). The target revisit time is 4 days with ± 30° off-nadir tilt. The SSO will be installed with a frozen eccentricity which allows a "fixed" GSD at the same latitude. The resulting GSD variation as a function of the latitude is shown in Figure 14.
Overview of the 40 payloads of the Transporter-4 mission of SpaceX 25)
• EnMAP (Environmental Mapping and Analysis Program), a DLR hyperspectral satellite mission to provide high accuracy hyperspectral image data of the Earth surface on a timely and frequent basis (980 kg).
• ION SCV-005 Almighty Alexius: A CubeSat deployer of D-Orbit, carrying various payloads, deployed into a 500 km Sun-synchronous orbit. 26) 27)
• GNOMES-3 (GNSS Navigation and Occultation Measurement Satellites): A radio occultation commercial weather satellite (20 kg) of PlanetiQ, USA.
• Hawk 4A, 4B, 4C: A pathfinder cluster mission for identifying RFI locations of HawkEye 360, USA (13.4 kg each S/C).
• LLynk Tower 1 (Lynk-05): An experimental communications nanosatellite built by Lynk Global Inc., USA, for providing coverage to mobile devices.
• MP42 microsatellite (IoT) of NanoAvionics, USA: To be deployed into low Earth orbit (LEO) via ExoLaunch's CarboNIX separation ring aboard SpaceX's Falcon 9 rocket. 28)
• ÑuSat/Satellogic: An Argentine company launching 5 microsatellites on a SpaceX mission, building a 90-microsatellite Earth observation constellation. 29)
• AlfaCrux: A 1U CubeSat of the University of Brasilia for educational and technical investigations of narrowband communication.
• ARCSAT (Arctic Satellite): A 6U CubeSat of FFI (Norwegian Defence Research Establishment) aimed at improving tactical communication in the Arctic.30) 31)
• BRO-7 of UnseenLabs, France: A 6U CubeSat providing spectrum monitoring and electromagnetic intelligence service (SIGINT) for maritime and aerial traffic surveillance.
• CZE-BDSat: A Czech 1U amateur CubeSat carrying technologies for testing pressure sensors and alternative solar power systems in space.
• Omnispace Spark-1TM: An IoT CubeSat supporting the mobile industry 3GPP standard in band n256, advancing the development of Omnispace’s global hybrid non-terrestrial network (NTN). 32)
• Patrol Mission (KSF2) x 4 of Kleos Space S.A: Space-powered RF reconnaissance data-as-a-service (DaaS) company, expanding data collection capability.
• Pixxel TD-2 (Shakuntala): A hyperspectral earth imaging satellite of Pixxel, USA and India, providing global coverage every 24 hours. 33)
• PlantSat: A 3U CubeSat of the University of Chile for studying plant growth in low Earth orbit, along with SUCHAI 2 and SUCHAI 3 nanosats for basic science research. 34)
• SpaceBEE of Swarm Technologies Inc., Palo Alto CA, USA launched 12 tiny 0.25 U CubeSats (picosatellites) with ExoLaunch service provider.
• Launch of an Undisclosed EO satellite of NanoAvionics.
Mission Status
• November 8, 2023: EnMAP's journey has been successful throughout its first 1.5 years on orbit, with the collected data being readily accessible to users since November 2, 2022. As of March 21, 2023, the EnMAP mission had garnered significant interest globally, with 795 registered users from 69 countries. Notably, the distribution of requested images indicates that Europe is of particular interest.
- Moreover, the first EnMAP User Workshop, held online from October 10-11, 2023, witnessed the participation of 430 international registered users, with approximately 200 attendees engaging with the presentations of 46 speakers. The workshop showcased the mission's progress and potential, emphasizing its role in addressing environmental challenges through diverse applications and collaborations.
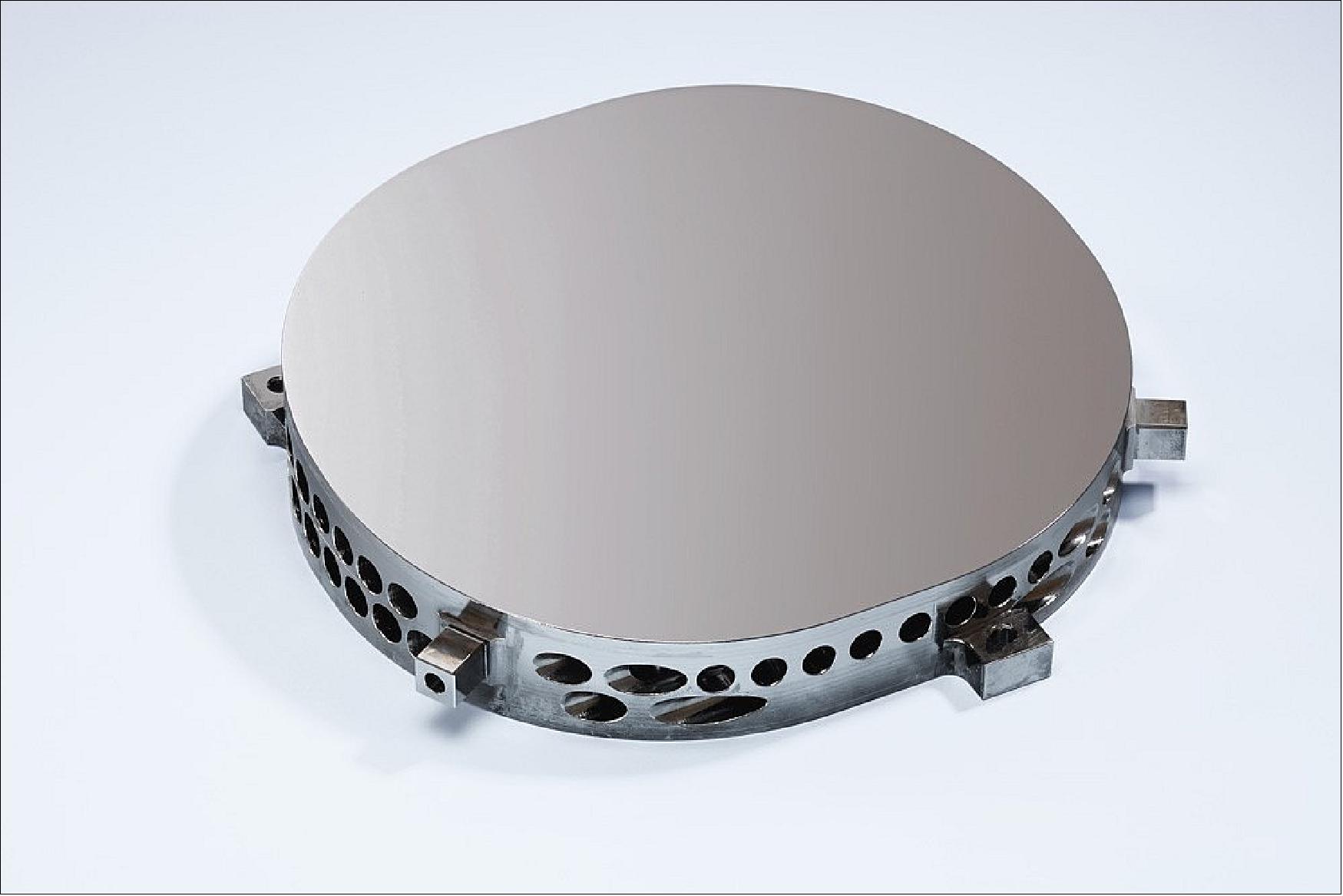
• May 5, 2022: The recent launch of EnMAP, Germany's first hyperspectral satellite, represents a significant milestone in environmental analysis and climate protection. Managed by the German Space Agency at the German Aerospace Center in Bonn, EnMAP's mission is to provide comprehensive Earth and water diagnostics through a combination of superior imaging and spectral data. The satellite's powerful Hyperspectral Imager (HSI) enables the measurement of solar radiation across 242 spectral channels, capturing a broad spectrum ranging from 420 nm to 2,450 nm at a high spatial resolution of 30 m x 30 m. The Fraunhofer Institute for Applied Optics and Precision Engineering (IOF) played a crucial role in the mission, manufacturing and optically coating eleven metal mirrors for EnMAP's telescope and spectrometer optics (Figure 15). These mirrors, composed of an aluminum alloy and an X-ray amorphous thick film of nickel-phosphorus, underwent cutting-edge precision machining and polishing techniques, resulting in exceptional microroughness levels and shape accuracies. The coated surfaces employ protected silver for the visual spectral range and sputtered gold for the infrared spectral range, enabling EnMAP to generate insightful images for various environmental and resource management applications.
- Four weeks after its launch, EnMAP transmitted its initial images from space, capturing a swath measuring approximately 30 kilometers in width and 180 kilometers in length over Istanbul, Turkey (Figure 16). These images were relayed to Earth using the DLR ground station in Neustrelitz. With the mission expected to transition to its operational phase within the next five months, scientists anticipate the commencement of data collection targeting specific regions of the Earth for further analysis and study. 35)
![Figure 17: EnMAP- one image many different information contents (image 1/3). Four weeks after its launch, EnMAP has now sent home the first images from space. They show a strip about 30 km wide and 180 km long over Istanbul on the Bosporus in Turkey. The data were sent to Earth via the DLR ground station in Neustrelitz. In another five months, the mission is scheduled to enter the operational phase. Then scientists can start collecting data on specific areas of the Earth [image credit: DLR (CC BY-NC-ND 3.0)]](https://eoportal.org/ftp/satellite-missions/e/EnMAP_090522/EnMAP_Auto10.jpeg)
• April 14, 2022: EnMAP's successful completion of the Launch and Early Orbit Phase (LEOP) marked a significant advancement, following the acquisition of the mission reference orbit on April 9, 2022. During this phase, the satellite operations were rigorously tested, confirming the safety of the operations, verifying the functionality of the X-band downlink through housekeeping data, and releasing all launch locks. Notably, the activation of the satellite's thermal control system was identified as a notable challenge, although the Visible and Near InfraRed (VNIR) camera's thermal control system has been successfully initiated. Moving forward, the activation of the thermal control system for the ShortWave InfraRed (SWIR) camera is a key next step in the upcoming commissioning phase, preceding the commencement of Earth observations and calibration acquisitions. 36)
Sensor Complement
HSI (Hyperspectral Imager)
The HSI instrument is a pushbroom type hyperspectral imager providing global coverage in two channels (VNIR, SWIR). The objective is to observe in the spectral region of 420-2450 nm (228 in total sampled at 6.5 nm in VNIR and at 10 nm intervals in SWIR) with a ground sampling distance of 30 m and a swath width of 30 km (up to 99 bands are allocated for VNIR, and up to 163 bands are allocated for SWIR). The EnMAP concept is directly relevant to natural and anthropogenic issues of concern to the people as well as to the decision makers. 37) 38) 39) 40) 41) 42) 43) 44) 45) 46) 47) 48) 49) 50)
Instrument concept: A dual spectrometer approach was chosen to cover the required spectral range from 420 nm to 2450 nm due to different spectral sampling requirements for the visual near-infrared (VNIR) and shortwave infrared (SWIR) ranges. A silicon-based detector system was selected for the VNIR range from 420 nm to 1000 nm, while the SWIR spectrometer features a mercury cadmium telluride (MCT) diode array, which is sensitive from 900 nm to 2450 nm. For the SWIR spectrometer, the spectral sampling distance is 10 nm on average, which is sufficient to resolve the typical mineralogical features around 2000 nm, guaranteeing a good SNR in the range where solar irradiation is low.
The spectral sampling interval of the VNIR spectrometer, on the other hand, has been chosen to be 6.5 nm on average, a compromise between resolving power and keeping the SNR as well as the data volume at acceptable levels. Based on the demanding polarization sensitivity requirement as well as the high optical throughput necessary to achieve the requested SNR performance, a prism type disperser has been chosen. This choice results in acceptable nonlinear dispersion behavior compared to the equidistant spectral sampling of a grating-based instrument. Thus, the instrument features a dual spectrometer concept with individual prism dispersers generating two data sets for VNIR and SWIR bands. These two data sets will be merged by on-ground processing to form one hyperspectral data cube using the spectral overlap of the two spectrometers from 900 nm to 1000 nm.
The common approach to generate this overlap is to use a single entrance slit combined with a dichroic beam splitter to separate the spectrometer bands. This method allows good coregistration between the spectrometer bands, but is problematic with respect to the polarization sensitivity and will result in reduced SNR in the overlap region. EnMAP uses a dual aperture split FOV concept to overcome these difficulties. The two spectrometers are coupled to a common telescope using a field-splitting unit that features two closely spaced entrance slit apertures and a beam separating optic. Therefore, both spectrometers deliver full SNR performance in the region of spectral overlap, thereby permitting the data sets to be merged with high precision and without the drawbacks of increased dichroic induced polarization sensitivity.
The split FOV results in different lines of sight for both spectrometers as illustrated in Figure 17. Tue SWIR FOV travels ahead of the VNIR FOV along the satellite flight direction by 20 times the instantaneous FOV (IFOV, 45 µrad) or approximate 600 m on the ground. Thus, the VNIR data for approximate identical ground target locations are recorded with a time delay of 20 frames or 86 ms compared to the SWIR data. To meet the coregistration requirement, the satellite platform must be highly stable with respect to its line of sight pointing.
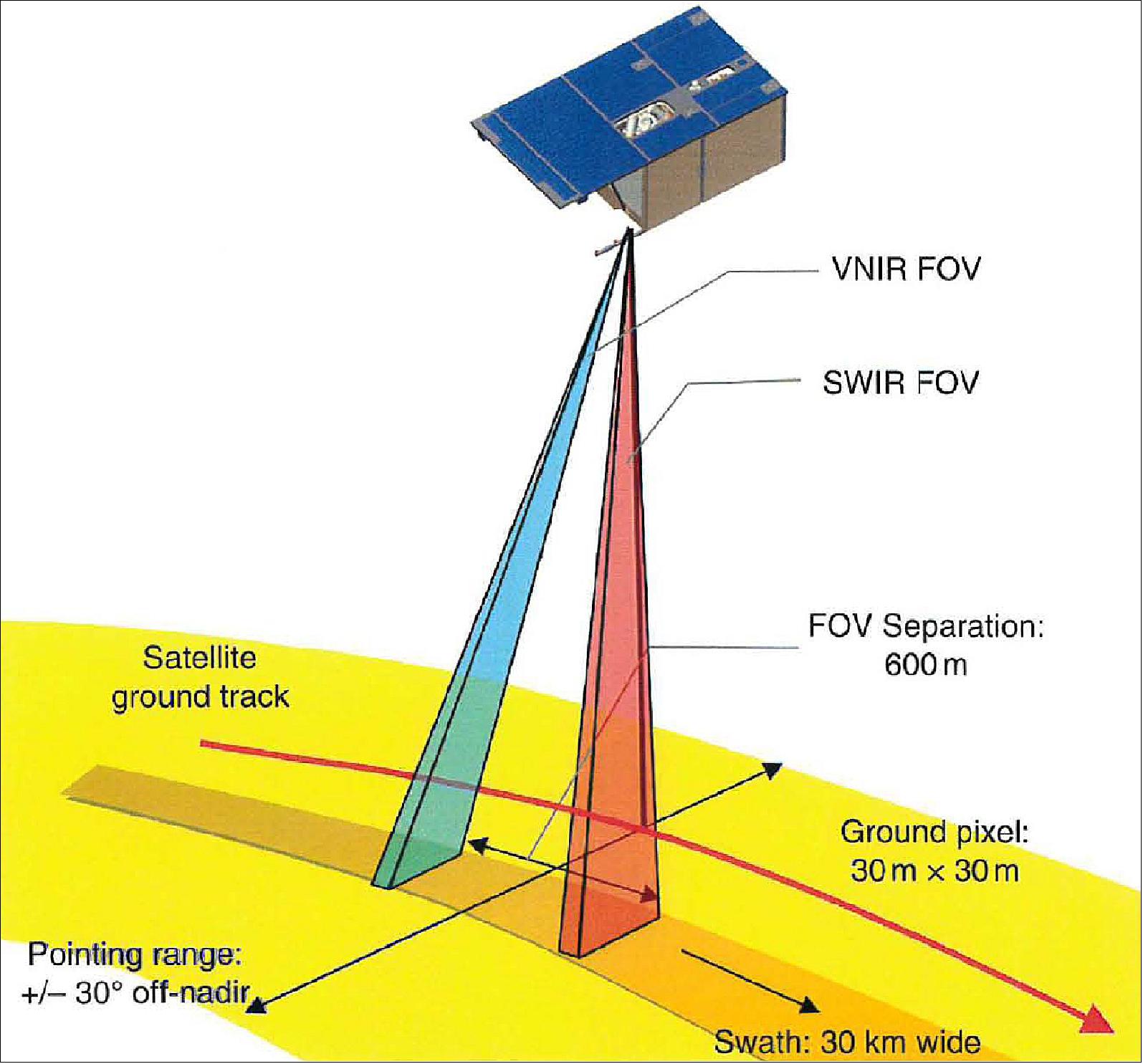
Legend to Figure 17: The HSI pushbroom type instrument features a split FOV for the VNIR and SWIR spectrometers. Image data for the two channels (VNIR and SWIR) are recorded with a delay of 88 ms. For the chosen orbit and with 30 km swath width and ±30º off nadir pointing capability, global site accessibility is guaranteed within 4 days.
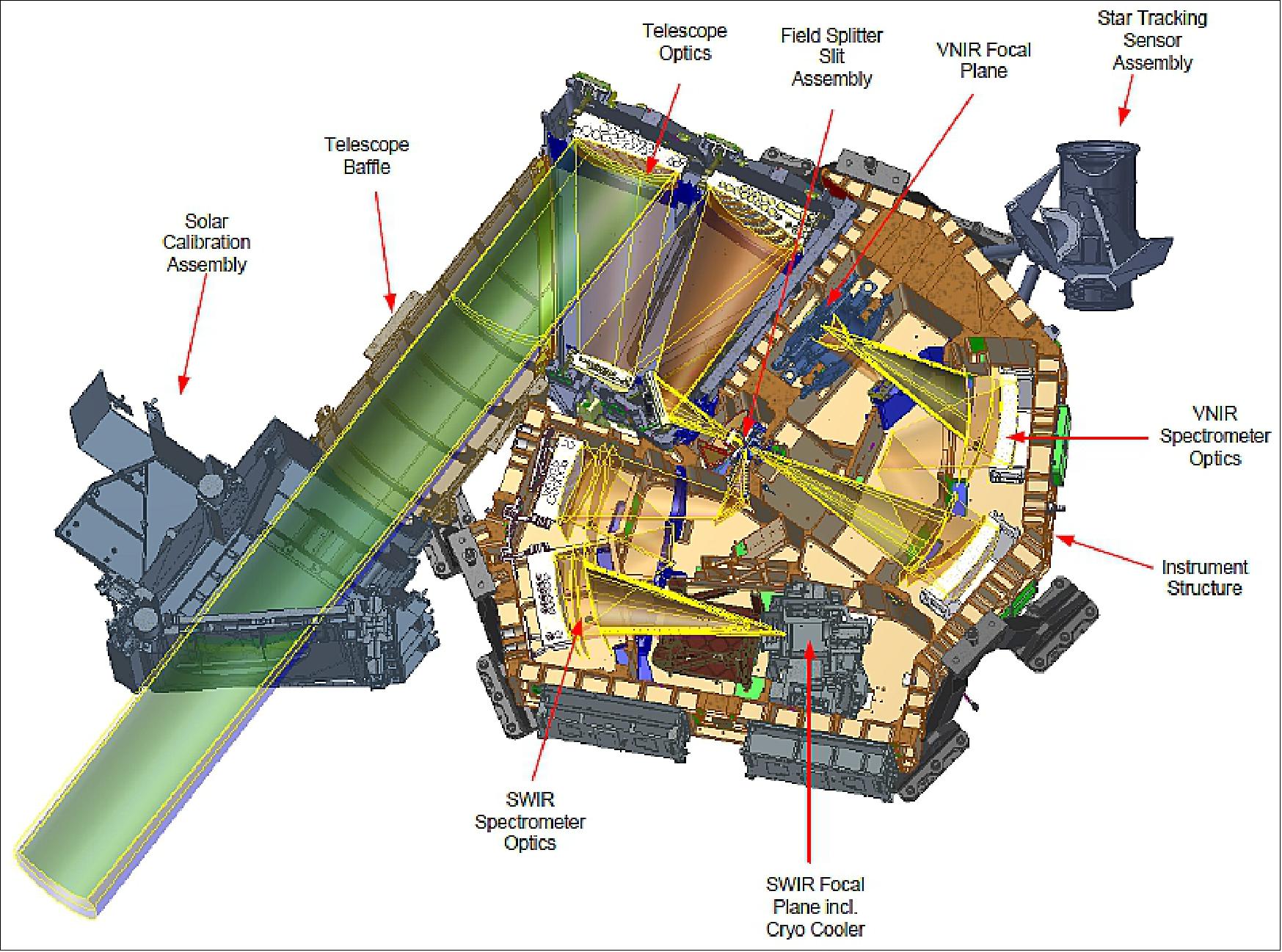
Dual Spectrometer Instrument Concept: The push-broom type instrument features two prism-based spectrometers for the VNIR and the SWIR spectral ranges coupled to a field splitter slit assembly, which carries two separate slits for in-field separation and a micro-mirror to redirect the SWIR field into the SWIR spectrometer. A schematic view of the instrument design is presented in Figure 18. The slit is located at the image plane of a near diffraction-limited three mirror anastigmatic telescope with an across-track field of view of ±1.3º. Radiation enters the system through a calibration device, which allows switching between Earth view, full-aperture Sun diffuser calibration and launch protection modes. A baffling system ensures good out-of-field stray light performance.
Spectral coverage | 420 nm - 2450 nm |
NEΔR (Noise Equivalent Delta Radiance) | VNIR: 0.005 |
Spectral sampling | VNIR: 6.5 nm (6.5 nm average) |
Spectral stability (VNIR-SWIR) | 0.5 nm VNIR, 1 nm SWIR |
Radiometric stability | ± 2.5 % between calibrations |
GSD (Ground Sampling Distance) | 30 m x 30 m nadir |
Frame readout rate | 230 MHz (4.3 ms integration time) |
MTF (Modulation Transfer Function) | > 25% at 16.6 cycles/km (Nyquist) for all wavelengths across track |
Radiometric resolution | 14 bits with SNR of 500 at 495 nm (VNIR) and of 150 at 2200 nm (SWIR) |
Swath width | 30 km |
FOR (Field of Regard) | ± 390 km |
Smile and smile effects | ≤ 0.2 pixel |
Band-to-band registration (VNIR/SWIR detectors) | ≤ 0.2 pixel (co-registration) |
Local equator crossing time | 11:00 hours |
Pointing accuracy, knowledge | better than 500 m, better than 100 m |
SNR at reference radiance, SNR at reference conditions | 500: 1 @ 495 nm (VNIR) |
Several onboard facilities for instrument calibration allow consistent monitoring of instrument response and enable a high data quality and reliability to be achieved after on-ground processing. lt is foreseen to have the possibility to calibrate the spectral behavior as well as the relative and absolute radiometric properties by means of calibration light sources and a full-aperture sun diffuser.
Optical System
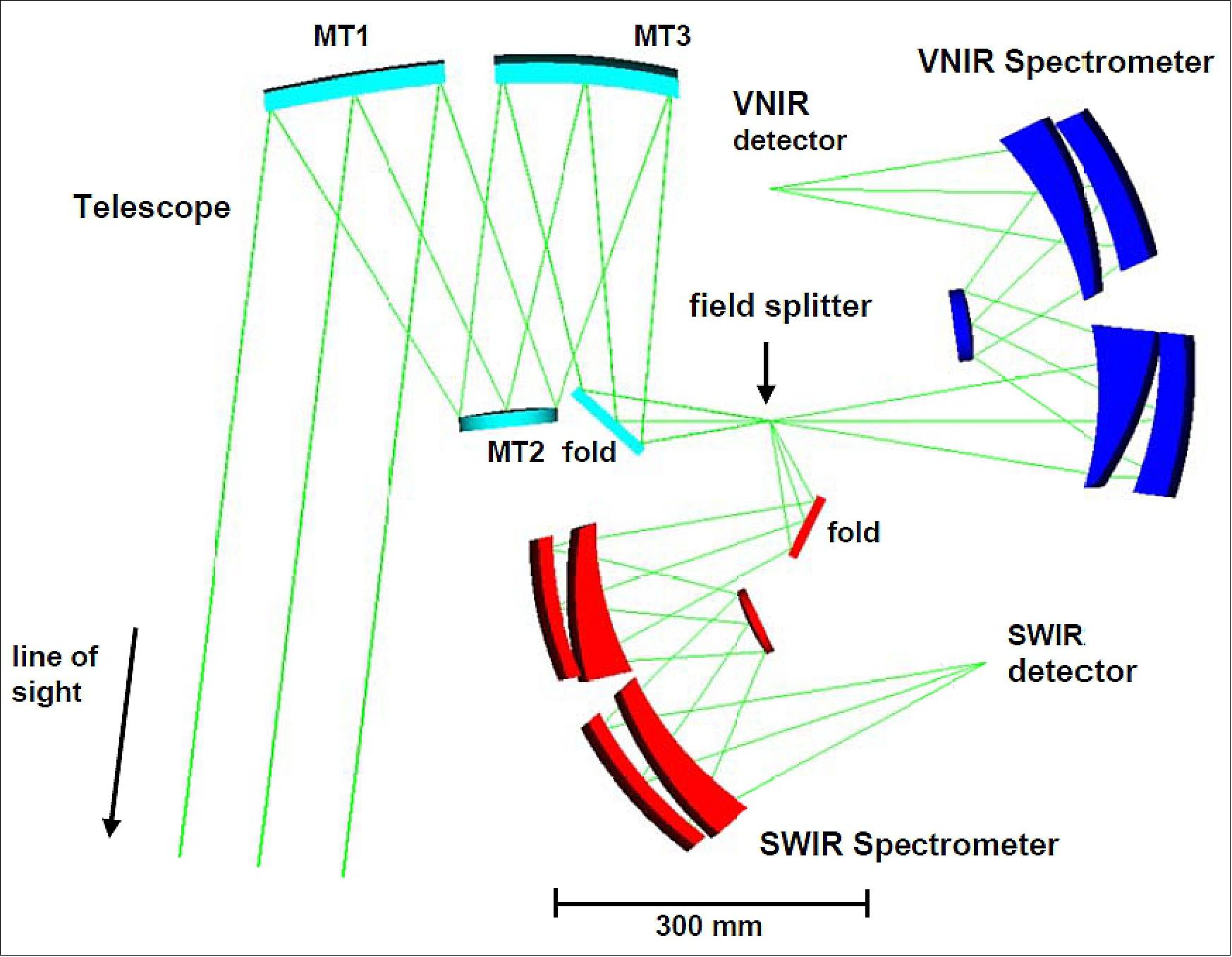
Tue optical system of the hyperspectral instrument features a TMA (Three Mirror Anastigmat) telescope, which focuses upwelling radiation from the Earth via a fold mirror onto the field splitter unit (Figure 19). Light transmitted through the dual spectrometer entrance slits, contained within the field splitter, is directed into the unit magnification spectrometers, which form spectrally resolved images of the slits on the detectors. Tue optical speed of the system, which is free of artificial vignetting, is f/3. Tue system aperture stop is located at the second telescope mirror, generating a telecentric imaging situation at the field stop and, thus, matching the entrance pupil location of the spectrometers. With a lateral extension of 24 mm, the detectors define the field for the spectrometers and the telescope. Tue arrangement of the telescope and the spectrometers is such that all optical elements are located in one plane. lt was optimized for minimum volume and a minimum number of reflections as well as for accessibility during integration and ease of alignment.
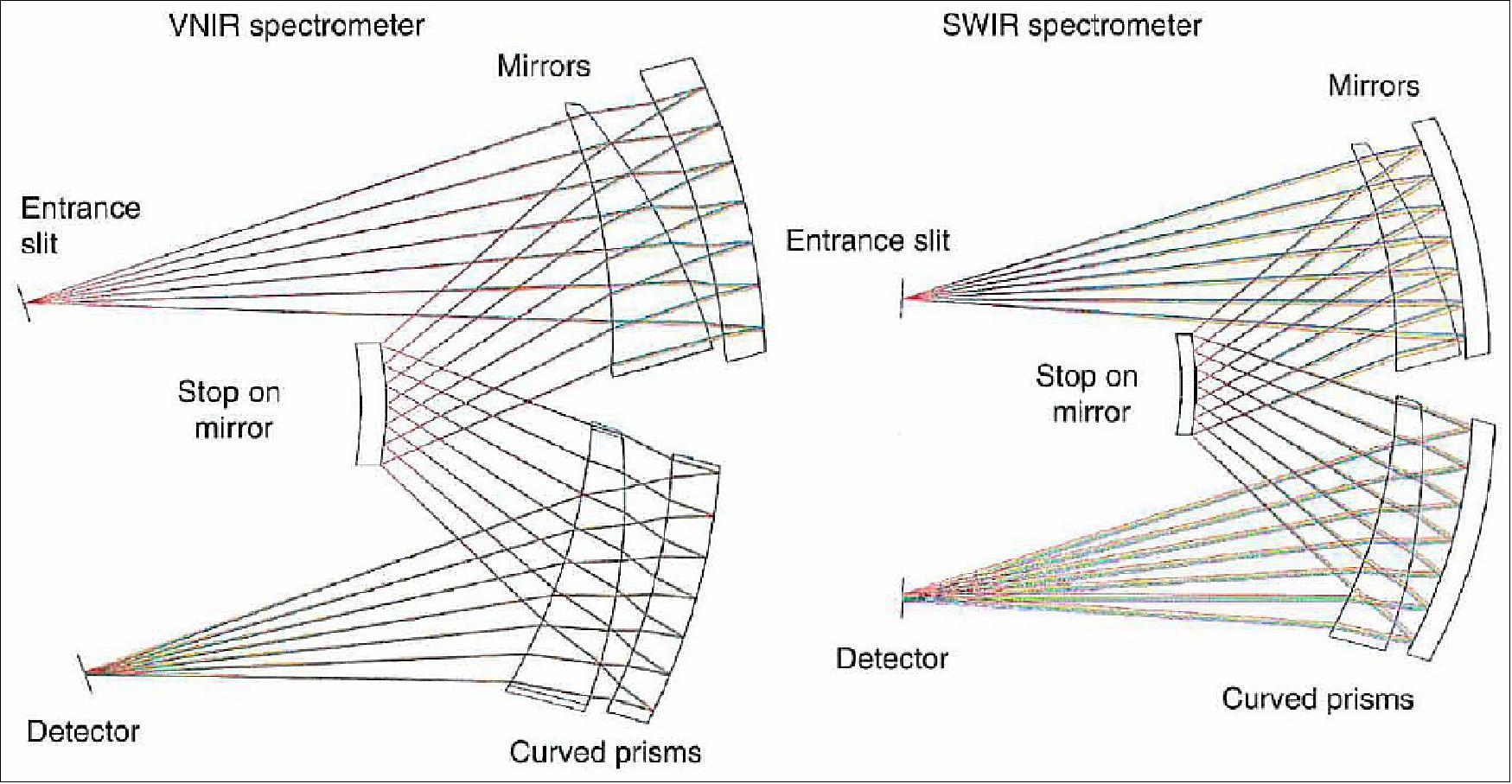
Spectrometers: Imaging spectrometer designs for hyperspectral applications must meet very demanding requirements with respect to distortion and image quality. Tue designs known to be capable of the required performance are the concentric Offner and Dyson types utilizing a grating disperser. For prism-based dispersion elements, the classical spectrometer design with a collimator-prism-imager configuration or an alternative approach using curved prisms in a non-collimated beam as initially suggested by Féry are possible.
For EnMAP, a novel design, which uses the very good imaging heritage of an Offner design and combines it with a curved prism disperser, has been developed. Figure 20 shows the layout of the new design. Following the symmetry of the Offner design, two prisms are introduced into an Offner relay, both of which are used in a double pass configuration for increased dispersive power. Initially, the prisms are set up similar to the principles described by Féry, keeping the angles of incidence constant across the pupil for the central field point. This optimization leads to a design that inherits the low distortion properties of the Offner system and exhibits good imaging performance in a compact design with minimum volume and all spherical surfaces.
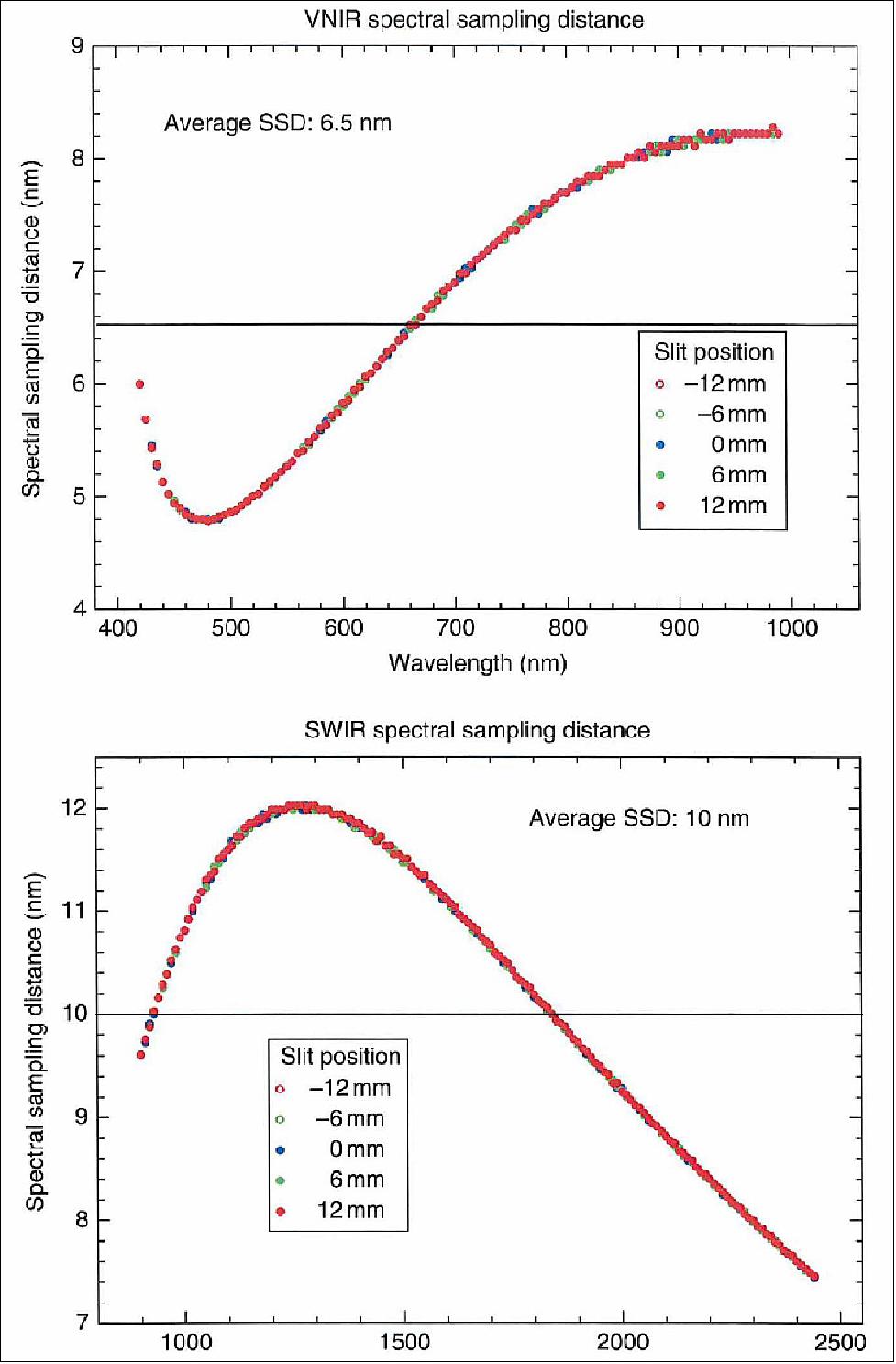
A prism-based spectrometer inherently suffers from geometrical distortion along the spectral axis (nonlinear dispersion) caused by the nonlinearity of the change in the refractive index with wavelength. The SSD (Spectral Sampling Distance), which denotes the difference in central wavelength for neighboring bands, is not constant over the spectrum as in a grating spectrometer. Combining different prism materials, leading to less SSD variation at the cost of increased system complexity, can alleviate the problem.
For the EnMAP SWIR spectrometer, a fused silica disperser was chosen based on the dispersion characteristics and the good properties of this material with respect to the space radiation environment. The optical layout of the SWIR spectrometer is shown in Figure 20. Tue dispersive behavior of the system results in an average SSD of 10 nm with variations of + 20 % and -25 % over the wavelength range and no variation with field position indicative of a low smile distortion, as illustrated in Figure 21, which depicts the SSD for all 154 SWIR bands. For the VNIR spectrometer, the strong dispersion of glasses in the UV range of the spectrum dictates the use of two compensating glass types. A combination of fused silica and a flint glass based on the high transmission, good dispersion compensation and relative radiation insensitivity of the materials was selected. Air spacing the prisms avoids problems with CTE (Coefficient of Thermal Expansion) mismatch and cementing. With the double element disperser, the VNIR spectrometer has a sufficient number of DOF (Degrees of Freedom) for aberration control, even when the internal reflection off the back side of the outer flint prism is used instead of an additional mirror to establish the Offner configuration (Figure 20).
For this spectrometer, the SSD varies from 4.8 nm to 8.2 nm with an average of 6.5 nm over the full spectral range (Figure 21). For both spectrometers, the spectral resolution of a band as defined by the FWHM (Full Width at Half Maximum) value of the corresponding spectral response function (slit function) is similar to the local SSD, deviating from this value by less than 10 %. This is because the spectrometers have been designed with a slightly negative anamorphic imaging behavior.
Tue designs have been filed for patent protection (EP2088409; display spectrometer, in particular for remote investigation). Tue prism elements will be coated with multilayer anti-reflection (AR) coatings. Tue mirrors are made of aluminum using the same mirror technology as for the telescope. They have a protected silver coating for the VNIR range and a sputtered gold coating for the SWIR range.
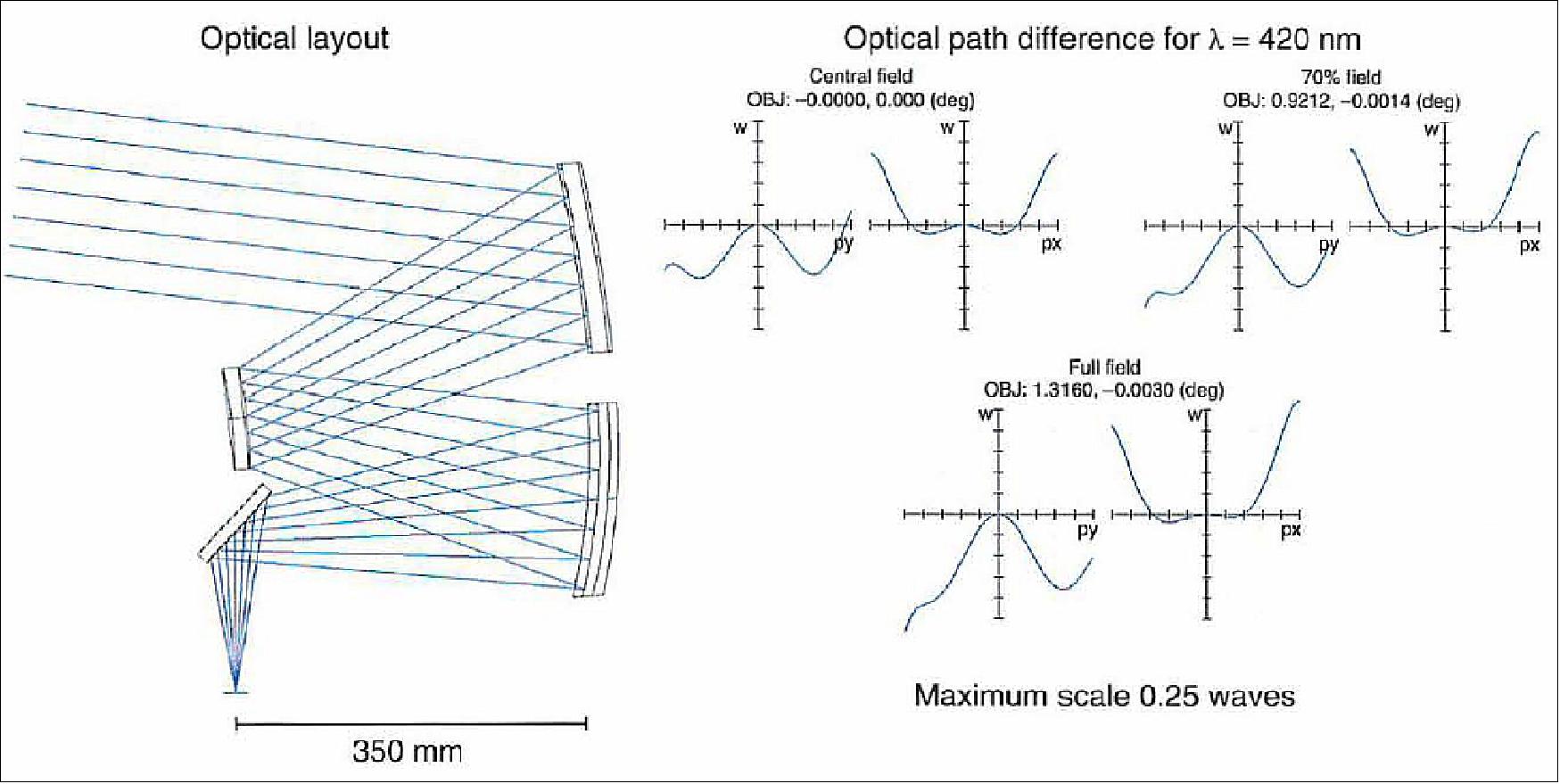
Telescope: Tue telescope design, first introduced by Wetherell and Womble, is a standard off-axis unobscured TMA without intermediate focus locations. Similar designs have been used in multiple Earth observation missions. The focal length is 522 mm with an across-track FOV of ±1.31°. Tue mirrors are conics with a fourth-order aspherical term. Figure 22 shows the layout of the telescope together with the OPD (Optical Path Difference) for three-field points. For the shortest wavelength, the OPD stays below a quarter of a wave, demonstrating the high degree of aberration control, which has been achieved. Thus, by design, the telescope is diffraction limited for the full spectral range.
The lightweight mirrors and structure of the telescope are made of aluminum. After single point diamond turning, a nickel-phosphorus (NiP) coating is applied to the mirrors to allow polishing of the optical surface. Finally, an ion beam figuring process brings the surface form figure down to less than 140 nm PV (18 nm root mean square (RMS)), while retaining a micro-roughness of less than 1 nm RMS after polishing. Tue mirrors are coated using an enhanced and protected silver coating in order to maximize the system throughput at 420 nm, while retaining very good transmission for the full spectral range.
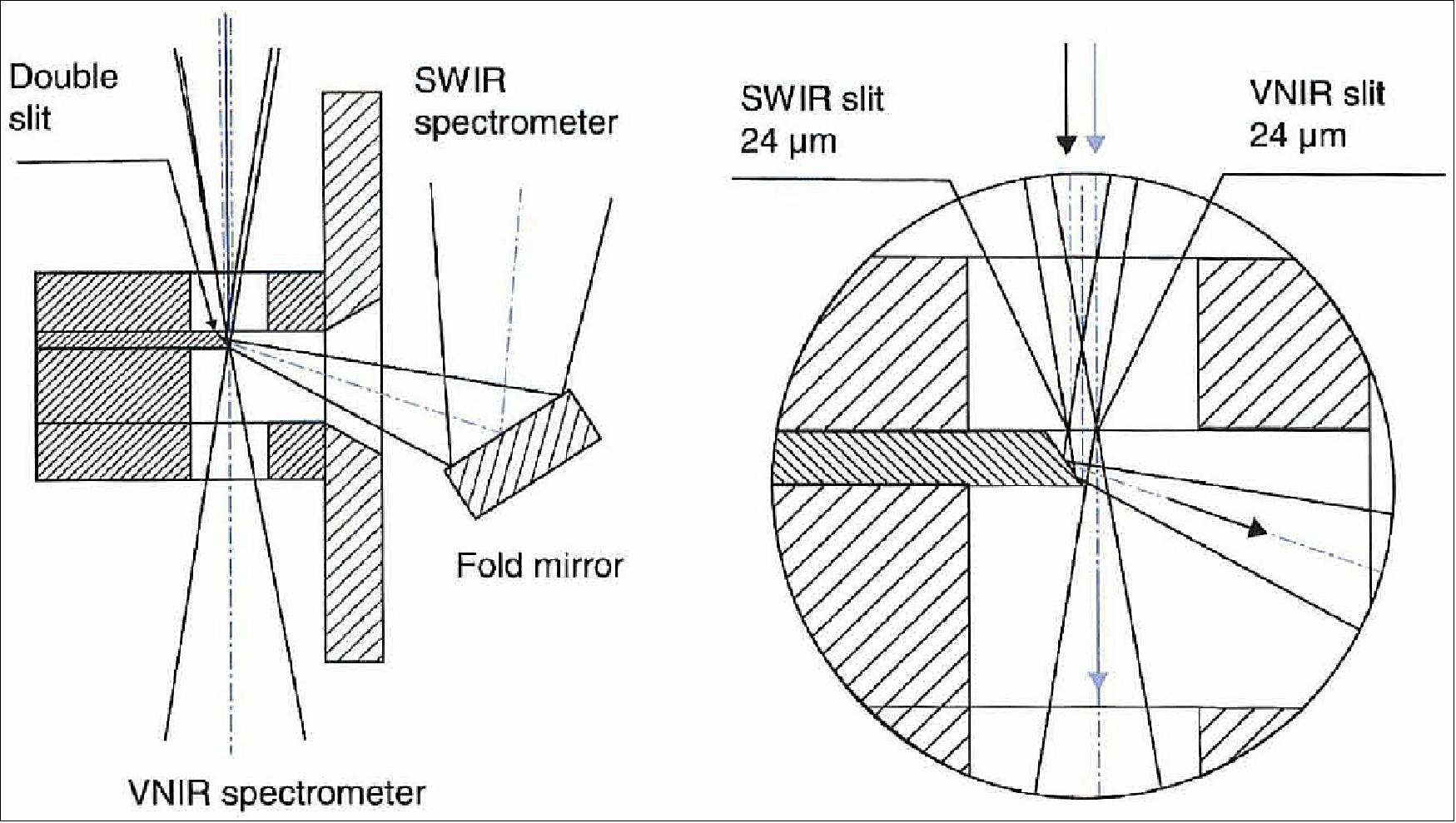
Field Splitter: Tue field splitting unit is the central element of the optical system, defining the FOV of the telescope as well as the spectrometers. lt serves a dual purpose by defining the entrance slits for both spectrometers and redirecting the beams into the respective units. A transmissive aperture design for the slits is necessary to separate the telescope compartment from the spectrometers for good stray light control. Figure 23 presents the principle design of the field splitter unit, which has been filed for patent (EP2026050; imaging spectrometer comprising a device for separating at least two light beams, each representing an area). Light from the telescope passes an element, which defines the two slit apertures, and a micro-mirror subsequently reflects the beam associated with the SWIR range before the two beams merge again. To avoid problems with the environmental stability of a protected silver coating on a micro-mirror, the accommodation of the instrument has been chosen so that the VNIR beam is not subject to a reflection. Tue distance between the two 24 µm wide and 24 mm long slits for the split FOV concept must be kept as small as possible in order to keep the separation between the spectrometer FOV s as low as possible for good data co-registration.
Technological constraints limit the minimum separation to 480 µm, because the micro-mirror becomes increasingly fragile to manufacture and coat. In addition, the suggested slit geometry creates a central self-supporting beam between the two apertures. Tue stiffness of this large aspect ratio beam must be made sufficiently high to endure launch loads as well as to ensure the correct aperture geometry. Very tight tolerances for the slit geometry on the order of 1 µm for width, parallelism and straightness and 0.2 µm for edge radii are necessary for good instrument performance.
Detectors: In spaceborne hyperspectral imagers of the pushbroom type, the focal plane technology is extremely demanding, pushing the limits of available detector technology. High-frame rate area sensors generate up to 60 Mpixel/s of data that must subsequently be digitized with low noise and high dynamic range. Electronic integration time control is necessary to be able to make optimum use of the available light and the pixel full well capacity, which is at the limits of sensor technology due to the high SNR requirements for EnMAP as well as to enable all onboard calibration procedures.
VNIR detector: For the silicon based VNIR focal plane array, two alternative detector technologies, CMOS (Complementary Metal-Oxide Semiconductor) and CCDs (Charge-Coupled Device), were studied. Tue latter involves a frame-transfer sensor from e2V, which does not allow for direct electronic shuttering. Because of the high frame rate in EnMAP, the frame transfer time is always a significant part of the integration time with the result that spectral smear must be removed by post-processing. This processing step is known to have a detrimental effect on data quality by reducing the SNR depending on the spectral signature of the recorded data. Although both solutions fulfil the EnMAP requirements, the design selected for the VNIR detector was a back thinned, highly integrated CMOS imaging sensor by Fairchild Imaging.
Key parameters of the sensor are listed in Table 3. The detector integrates a pinned photodiode with a five-transistor pixel architecture to allow global electronic shuttering in a stare-while-scan read-out mode. Fora pixel pitch of 24 µm by 24 µm, the linear full well capacity is 1 Me- with 2 % nonlinearity. Using on-ground post-processing, the linearity of the sensor data will be corrected to 0.2 % by implementing a LUT (Look-Up Table) based algorithm with individual correction LUTs for each pixel.
Parameter/item | VNIR (Visible Near Infrared) | SWIR (Short Wave Infrared) |
Detector type | silicon CMOS imaging sensor | MCT+ROIC |
Readout circuit | pixel-based source follower with floating diffusion, dual 13-bit column ADCs with overlapping gain ranges | dual conversion gain CTIA, 8 multiplexed |
Readout mode | stare-while-scan incl. nondestructive readout option integration time control | stare-while-scan integration time control |
Integration time control | global electronic shutter, 0 to 4.3 ms by external control | |
Spectral range | 420 nm - 1000 nm | 900 nm - 2450 nm |
External quantum efficiency | >80% at 650 nm (2-layer AR) | > 70% over full spectral range |
Operational temperature | 294 K ± 0.2 K | 150 K ± 25 mK |
Pixel geometry format | 24 µm(H) x 24 µm(V) 1024(H) x 108(V) active pixels | 24 µm(H) x 32 µm(V) 1024(H) x 256(V) |
Linear full well capacity | 1 Me- | low gain 1.2 Me-, high gain 300 ke- |
System read noise | low gain 200 e- rms, high gain 70 e- rms including digital CDS | low gain 290 e- rms, high gain 160 e- rms |
Non-linearity | <2 % raw sensor data, | |
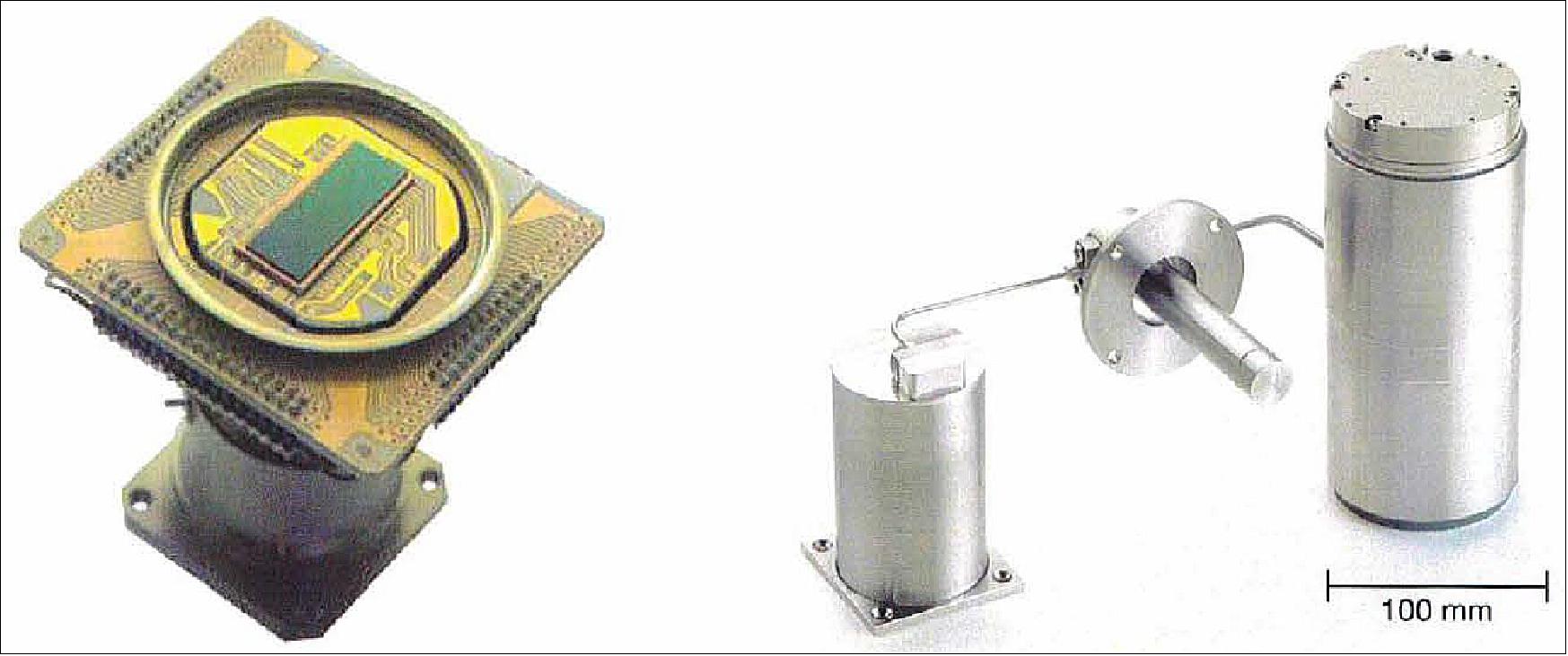
SWIR detector: A MCT-based detector from AIM Infrarot Module GmbH with a constant external quantum efficiency above 70 % was selected for the SWIR spectrometer. The photodiode array is indium bump bonded to a ROIC (Readout Integrated Circuit), which features one CTIA (Charge Trans-Impedance Amplifier) per pixel with dual capacities for charge-to-voltage conversion and a sample capacity for stare-while-scan operation. Tue ROIC has eight analog outputs with a maximum pixel update rate of 10 MHz each and a register-based state machine controlling chip operation as well as integration time control. Key properties of the SWIR detection system are listed in Table 3.
A rectangular pixel pitch of 24 µm in the spatial direction by 32 µm in the spectral direction creates sufficient chip area for the pixel circuitry. The integration capacity of the CTIA can be chosen between low and high conversion gain for each spectral row individually. Tue ratio of the capacitances is designed such that the dynamic requirements of EnMAP are met together with external 14-bit ADCs. This dual-gain structure is necessary to cover the inherent high dynamics of the solar flux in the SWIR, which changes by 1.5 orders of magnitude from 900 nm to 2450 nm. Based on the pixel architecture, CDS is not possible, resulting in a marginally increased read noise compared to the VNIR channel. The intrinsic linearity of the detector is better than 2 %, enabling on-ground post-processing to less than 0.2 %.
Tue small band gap of the MCT, which is tailored to deliver a cutoff at a wavelength of 2.5 µm, makes it mandatory to cool the detector to 150 Kin operation for dark current suppression. An extremely compact integrated detector cooler assembly was developed by AIM, housing the detector array, the ROIC, a pulse tube cooler and a cold shield for background-signal reduction in a Dewar with an optical window (Figure 24). Tue pulse tube, which uses helium as a working medium, is driven by a symmetric flexure-bearing compressor. Two pistons move anti-collinearly in order to minimize the vibration output of the unit. Using a moving magnet concept and low out gassing materials, the cooler is designed and proven to have a mean time to failure of more than 60,000 h. Tue dissipation of the cooling system for a total heat input at the cold tip of 1 W and a heat sink temperature of 294 K is less than 30 W.
Calibration and Correction
Ensuring the delivery of reliable and precise hyperspectral image data throughout the complete mission lifetime is essential to allow the international user community to extract the relevant information. Therefore, the instrument will be subject to extensive characterization and calibration measurements in the laboratory before launch. All necessary spectral, radiometric, and geometric instrument characteristics are tabulated, and for all measurements, using satellite onboard calibration equipment, corresponding pre-launch reference data are generated. Figure 25 illustrates the arrangement of the on-board calibration equipment, which employs principles that have proven to be successful for other hyperspectral sensors. After reaching the operational orbit, a link between pre-launch and post-launch instrument characteristics will be established. Major changes in instrument characteristics are expected due to air-vacuum transition, gravity release, and launch-induced settling effects. Afterwards, minor changes are expected during routine operations due to aging effects.
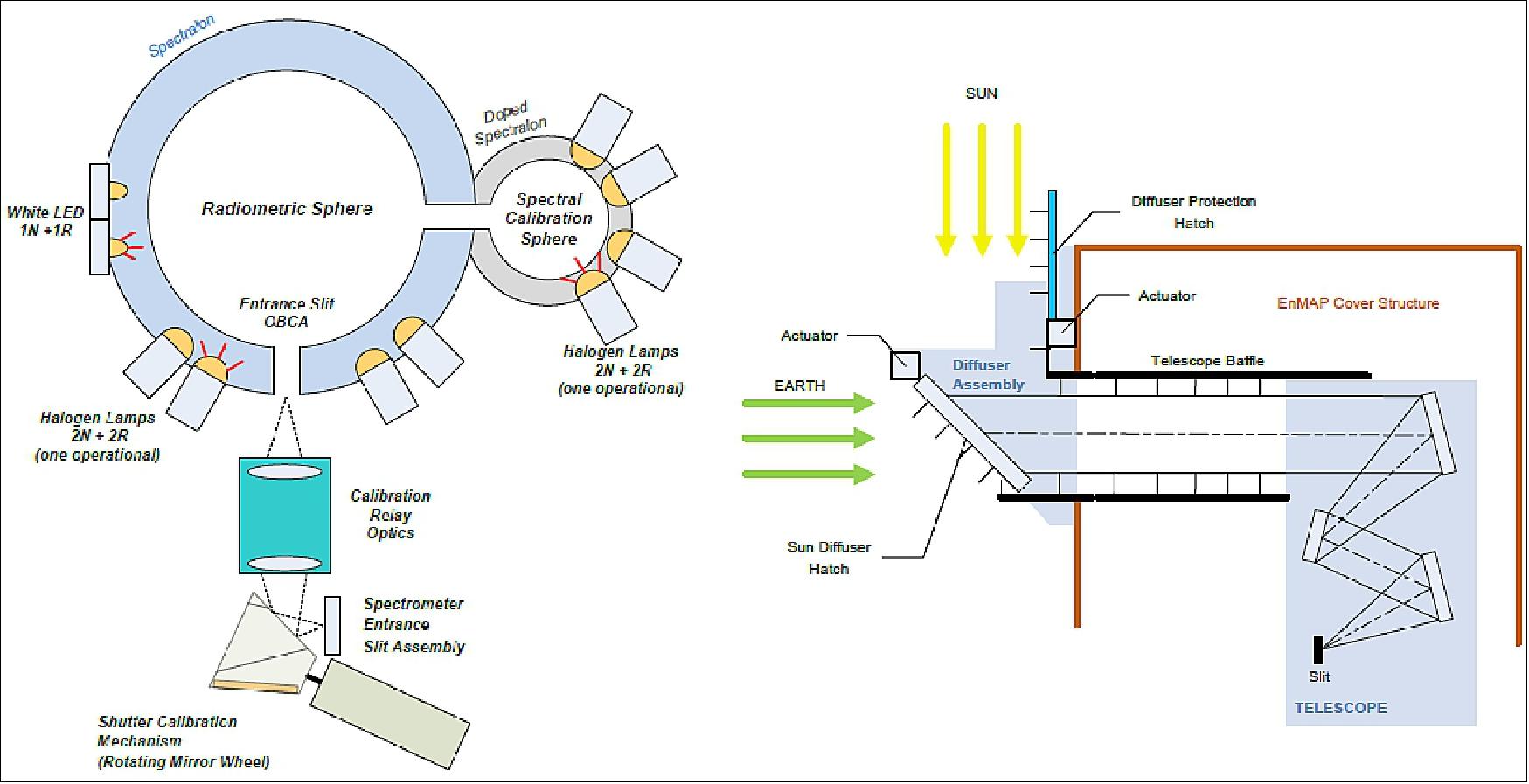
For absolute radiometric calibration to achieve better than 5% accuracy, the sun is used as a source of known spectral irradiation and correct spectral composition. A sun-illuminated diffuser, placed in front of the telescope, reflects radiation entering the sun calibration port into the system aperture. Acting as a diffuse reflectance standard, the full entrance pupil is simultaneously illuminated by the diffuser for all field points. Tue diffuser panel is mounted on a mechanism that allows it to be rotated in front of the telescope aperture for system calibration. Tue baffle design for the sun calibration port is such that stray reflections changing the well-defined irradiance behavior on the panel are avoided. Spectralon has been selected as diffuser material, because it has been demonstrated to be a stable standard of diffuse reflectance in a space environment. In the storage position of the mechanism, a protection cover to prevent premature degradation caused by constant ultraviolet exposure shelters the diffuser. For conversion to physical units, the solar irradiance spectrum and the measured BRDF (Bidirectional Reflectance Distribution Function) of the diffuser panel are used. 51)
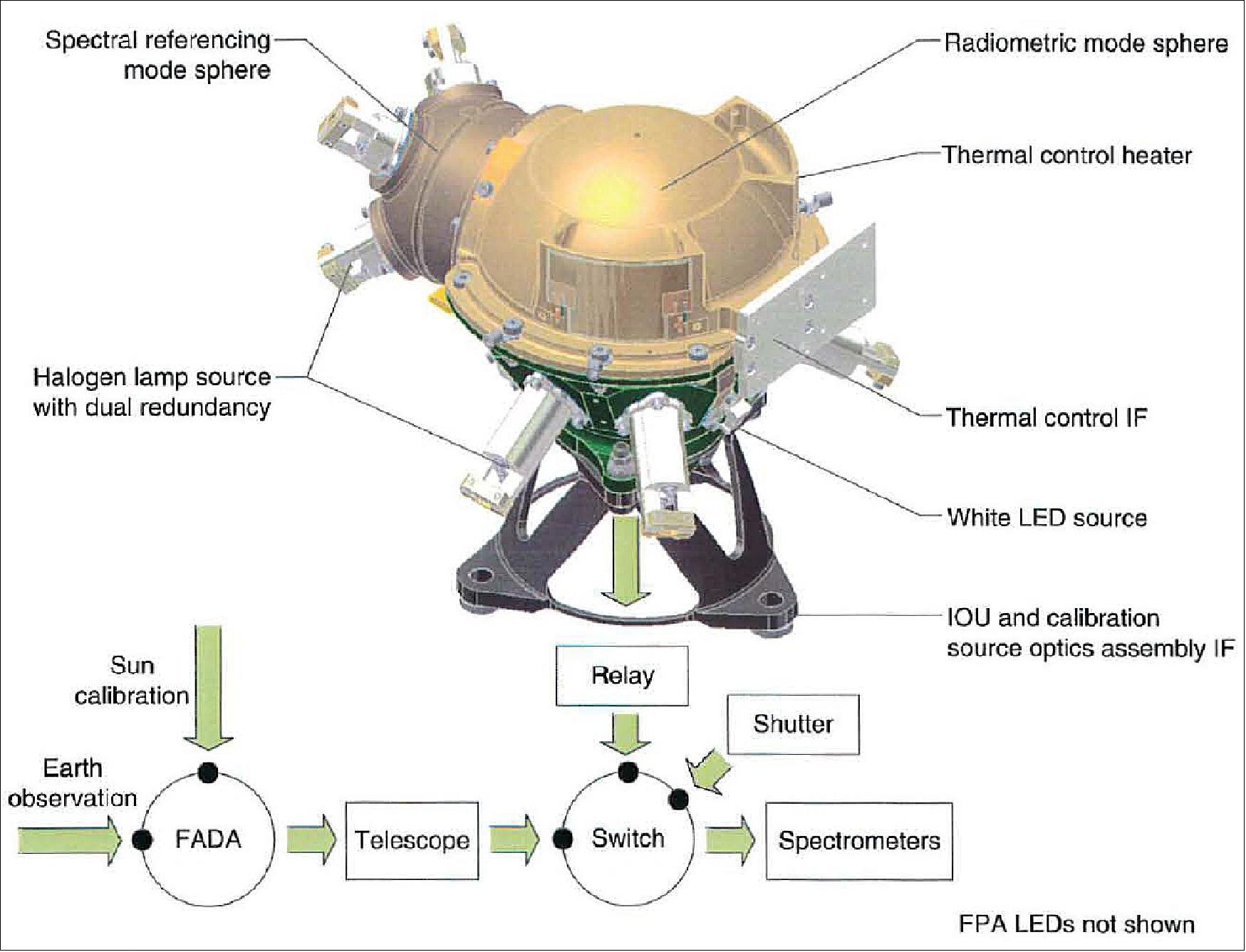
For spectral calibration to achieve better than 0.5 nm accuracy in the VNIR and 1.0 nm in the SWIR and to determine the sensor linearity, the instrument is equipped with an additional onboard facility. The spectrometer entrance slits will be homogeneously illuminated by the radiation emanating from an integrating sphere. Light from the output port of the sphere is imaged onto the field splitter unit using a dedicated optical system with a mirror mounted to the shutter mechanism. lt features three positions for Earth observation and absolute radiometric calibration (telescope input), spectral calibration (sphere input) and dark current measurement (shutter). Tue dark current measurements are complemented by deep space measurements. Tue polytetrafluoroethylene sphere is equipped with several light sources to provide various stable levels of illumination and the spectra for the different calibration tasks. Tungsten halogen lamps, driven by precision current sources, provide smooth broad spectrum radiation. Due to the spectral mismatch between the solar and the lamp spectra, white LEDs are added to enhance the short wavelength output of the sphere, an approach that has been demonstrated to be viable for spectrometer calibration in space for relative radiometric calibration. For spectral calibration, a second smaller sphere couples light with a strongly structured spectral flux to the primary sphere. Many distinct and stable spectral features are created by combining light from tungsten filament lamps with rare earth oxide doped Spectralon as a diffuser material. All light sources are featured multiple times for redundancy and to monitor degeneration. For linearity measurements, constant irradiance, produced by focal plane LEDs, is recorded with different integration times.
For geometric calibration to achieve better than 100 m accuracy, which will be improved by ground processing to 30 m with respect to a reference image, images that are distributed over a large latitude range will be acquired during repeated passes over selected calibration sites. Updating of geometric sensor model parameters will be accomplished by an adjustment using GCPs (Ground Control Points), which will be extracted by automatic image matching. In the adjustment, the improvement of attitude angles (boresight angles, namely instrument/star-sensor alignment), the improvement of interior orientation parameters (view vector, namely line-of-sight vectors of individual pixels), and the improvement of position data will be estimated. As these values are correlated, a weighting is needed based on the pre-launch variances of the measured values as the initial parameters of the sensor model are derived from laboratory calibration.
Mission Operations Concept
The mission operations concept is divided into two categories (Ref. 20):
• nominal operation
• contingency operation.
Nominal operation covers the whole mission duration, from LEOP and Commissioning Phase, Nominal Phase to De-orbiting phase. The autonomous on-board operations concept is most advantageous for the nominal daily operations. For LEOP and commissioning, de-orbiting and contingency operations the advantages are less, because there the performed tasks and activities are less regular but more dedicated and specific.
Within the LEOP and Commissioning Phase several tasks have to be performed in a certain order to guarantee the correct start-up and testing of the satellite. These tasks include: initial activation, commissioning of the satellites subsystems and general performance tests. During LEOP and Commissioning, an intensive supervision of the satellite’s health is ensured. The tasks during this phase are specific and must be supervised continuously. The same conditions must be applied for de-orbiting and contingency operations. Individual operational tasks are necessary and a full time observation of the satellite’s health is needed. Therefore the autonomous on-board operations concept does not facilitate these activities.
During the nominal phase, routine operations are performed on a daily basis. The EnMAP ground stations are Weilheim and Neustrelitz, Germany, where Weilheim is used for the S-band contact (TMTC), and Neustrelitz for the X-band contact (payload data download). For payload data download, only the night time X-band contacts are sufficient to dump the complete EnMAP payload data. For the S-band contacts, an average of 30 minutes/day are reached with the given orbit characteristics. During this time, all commanding and receiving of telemetry must be completed.
During daily operations the most common tasks are image acquisitions, payload data download and subsequent deletion of the data.
For these tasks, especially for an image acquisition, several subsystems have to be activated, controlled and coordinated simultaneously. Using dedicated telecommands for each subsystem, or even for each operation within the different subsystems, would lead to a great amount of telecommands. In addition, the ground station would need to have a detailed knowledge of the on-board timings. The EnMAP satellite bus requires only one single telecommand per task, i.e. only one telecommand for an image acquisition, a payload data download or data deletion. This is named the one-telecommand-philosophy.
The complex sequence of events, each of these tasks consists of, will be performed autonomously by the satellite according to the detailed parameter included in the telecommand.
The EnMAP HSI payload is controlled via scripts, so that changes on the payload timings and sequences do not change the concept of image acquisitions. In addition, the payload data is autonomously compressed on-board if requested by imaging command. For the payload data download, depending on the downlink duration, a matching amount of data is transmitted to the ground station autonomously.
The applied one-telecommand philosophy results in a very low effort for on ground modelling of on-board resources and mission planning for nominal operations. It is not necessary to have knowledge of the exact on-board timings. The generation of telecommands for image acquisitions and other operational tasks can be done according to simple rules provided in the satellite’s operations manual.
One-telecommand philosophy: Performing tasks such as image acquisition or data download require activation, control and coordination of several subsystems simultaneously. The implemented advanced on-board operation concept with its one-telecommand philosophy facilitates the conduction of these tasks and reduces the complexity of ground operations and mission planning tasks (e.g. scheduling). The concept enables the on-board computer to execute and supervise these tasks and autonomously control the EnMAP subsystem equipments accordingly.
The one-telecommand philosophy will be applied for the following tasks:
• Image acquisition during standard ground observation
• HSI calibration
• Payload science data download
• Payload science data deletion
• Orbit control maneuver.
For each of these tasks only one telecommand has to be sent from the ground station. These tasks are commanded via time-tagged telecommands (TTTCs). The TTTC includes all necessary parameters for the corresponding task and a time tag to define the start of execution. The on-board execution of the TTTC starts automatically at the specified time. The on-board computer controls all necessary subsystems and commands the required subsystem operations during the execution of the TTTC.
Image acquisition and HSI calibration: Image acquisition and calibration maneuver tasks can be performed anywhere on the satellite orbit. They are initiated via time-tagged telecommands, which are uploaded to the spacecraft during a previous ground station contact.
Subsystems involved are mainly the HSI payload, the mass memory and coding unit (DSHA) and the AOCS (Attitude and Orbit Control Subsystem). Concerning the handling of the subsystems, there is no difference for the on-board computer between the image acquisitions and the payload calibrations (in case an AOCS precise maneuver is required). Both tasks, image acquisition and calibration, require the same management of the AOCS and the DSHA (Data Science Handling Assembly). The only difference is that the instrument will be commanded to the image acquisition or calibration command sequence.
Depending on the imaging type (standard ground observation or HSI calibration), a different number of spectral channels will be gathered by the HSI and transferred to the DSHA for recording. The type of imaging and the spectral channel configuration to be used will be defined in the parameters of the TTTC. According to these parameters, the DSHA and the HSI will be setup, and the DSHA will be configured so it is ready for the storage of payload data at the defined start time.
For an image acquisition a specific AOCS pointing to the target is required. Therefore the AOCS will be set to the so-called precise mode, where the satellite will be moved according to a specific guidance profile. The TTTC includes an AOCS guidance list, which represents the required AOCS pointing profile in form of attitude quaternions. The AOCS on-board software will process the information contained in the uploaded list and will reconstruct (by means of interpolation) the complete guidance profile originally computed on ground. By the utilization of such a ground computed AOCS profile, which is included in each data take TTTC, the satellite can be “guided” to autonomously perform different pointing attitudes and profiles.
The instrument will be preheated a specific time before the data take starts. The according command and the imaging time tag will be sent from the board computer to the instrument so that the data take can take place at the required time, controlled by the HSI. In case there are two image acquisitions with a short time offset (less than the time required to pre-heat the HSI camera), the camera will not enter a stand-by mode after the first image acquisition end and be kept on the preheating temperature. In the case that the second image acquisition is not performed (e.g. deleted), the HSI will autonomously switch the camera to standby mode after a defined time if no further imaging sequence is started.
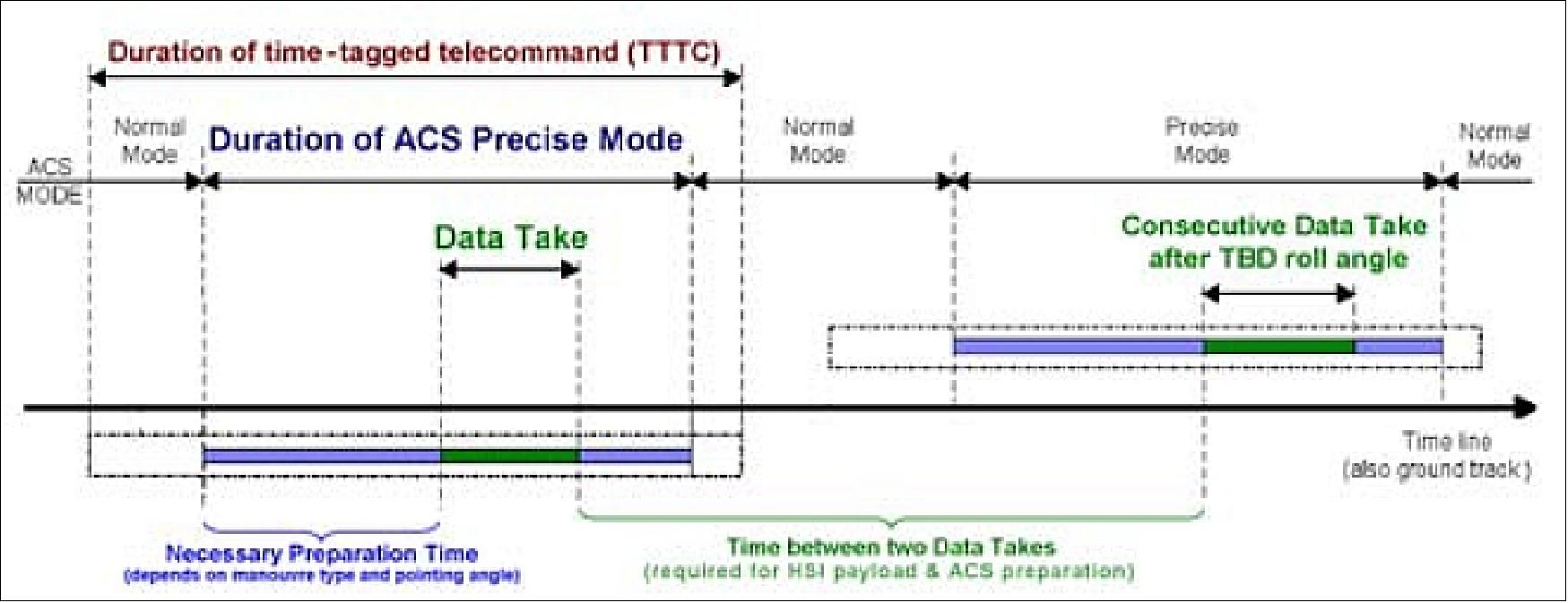
An example of a simplified imaging profile is depicted in Figure 27, showing a fictive sequence of different ACS (i.e. AOCS) precise modes to perform a sequence of two of subsequent image acquisitions at different pointing angles. One can see that the duration of the complete TTTC is longer than the data take itself. Before the data take sufficient time must be considered for the AOCS pointing and the initialization of the involved subsystems (mainly HSI and DSHA). After the data take some additional time must be considered as well for the re-initialization of the subsystems. Consequently, there has to be a timely gap between two consecutive data takes, which shall be performed at spacecraft attitudes. This gap must be considered when scheduling the data takes and preparing the adequate time-tagged telecommands.
The TTTC also includes information whether the data shall be compressed or not. If compression is requested, the process is started autonomously as soon as the acquisition of data is stopped.
The compression process can be interrupted by an execution of a new image acquisition TTTC. If there is a new image acquisition, the DSHA will automatically suspend the compression process if it is still running. Once the new files are recorded, the file compression process will be continued. The compression process works autonomously supervised by the DSHA.
The different time parameters will be calculated on ground, according to simple rules defined in the operations manual, enabling the configuration of the complete Image Acquisition TTTC on the basis of the Image Acquisition start time. But once having sent the one telecommand to the S/C all necessary tasks for the image acquisition are performed autonomously on-board. Combining all the times in one telecommand enables the on-board S/W to supervise the complete sequence belonging to one complex task. The execution reply represents the status of the complete task, and not only of one dedicated command to one element or subsystem. Due to this, the operator is able to judge about a successful or erroneous sequence by means of one reply code. In case of any failure during the sequence, an entry is generated in a log file, which indicates the error reason.
Payload science data download: A payload file download maneuver is also initiated via one time-tagged telecommand. In this telecommand all necessary information is given so that the downlink can be performed without any further ground contact via S-band.
Within the DSHA the image data is sorted in such way, that for each channel of an image acquisition a separate file is generated. These files are marked with the according image ID and channel ID. The image ID is given by the ground operator. The channel identifier is given autonomously during the image acquisition. Each file is addressed via its image ID and its channel ID. This guarantees an explicit allocation of the image files to the commanded image acquisition.
The TTTC for the file download maneuver contains information of the start and end image Ids and channel IDs and the duration of the X-band contact. The files within the DSHA are marked with a so-called download flag. This flag indicates whether a file has already been downloaded or not. Using this information the DSHA autonomously detects the files to be downloaded and transmits them, via the X-band transmitter, during the contact period to ground.
All downloaded files are marked as downloaded after the completion of the download. In the case that not all of the commanded files can be downloaded, the remaining files will not be marked as downloaded. These files can be downloaded in a following contact.
It can be configured whether all files (already downloaded and not yet downloaded) or only not yet downloaded files should be transmitted. Thus, the ground operator does not need to specify exactly which files should be downloaded. He can just define a start and an end image ID and all files that have not been downloaded before will be transmitted. In case a download of a dedicated file should be repeated, the download flag can easily be set back to “not downloaded”.
Due to this, the ground station can schedule a download maneuver with always the same set of parameters for the start image identifier, start channel and end image identifier and end channel. Only the start time for the X-band contact, the duration of the data downlink and the AOCS parameters must be adjusted for the specific maneuver. The size of the files must not be checked and no calculation which files can be downloaded during the X-band contact must be made on ground. Due to the incrementing ID order, which is used for the image acquisition and during the download, the first acquired data is also downloaded first.
Within the mass memory, no file will be autonomously deleted. To delete any files, a specific telecommand initiated by the ground station must be executed.
The execution of the payload data download maneuver is similar to the image acquisition maneuver. The ACS subsystem needs to perform a rotation of the S/C to point the X-band antenna towards the ground station. During the AOCS preparation, the DSHA will be configured and switched to its transmission mode, to enable the file download. Other than for image acquisition, the HSI payload is not involved for the file download process.
The duration of downlink phase is equivalent to the X-band contact time. At the start of the downlink phase, a set of commands are sent by the on-board computer to the affected subsystems to start the transmission and the file download process. The DSHA will be set to its transmission mode, so that the transmission process can be initiated and prepared within the DSHA. After contact establishment the DSHA will be commanded to start the download of the payload data. The DSHA transmits autonomously a matching amount of files based on the information (downlink duration, files to be downloaded) from the TTTC. Only complete files are downloaded. If no image data is available the DSHA autonomously generates idle frames.
In addition to the DSHA the X-Band transmitter is controlled by the on-board computer. It will be switched on and off according to the X-band contact time given in the TTTC. The control of the AOCS subsystem is identical to an image acquisition maneuver.
As for the image acquisition the file download process is performed completely autonomously on board the S/C having sent only one telecommand.
Payload science data deletion: Files in the mass memory of the DSHA will be deleted only by a telecommand from ground and not autonomously. The deletion telecommand, similar to the file download command, can be executed for all files or only for already downloaded files in a specific range.
This concept foresees that a general delete command can be executed, which does not consider the specific file number for the actual deletion process. Instead of adjusting the file number for every single file deletion, it is recommended to setup the telecommand that a range of files can be deleted.
With the use of the telecommand parameter, which defines that only already downloaded files will be deleted, the not downloaded files are still available for the next download maneuver.
With this concept of the file deletion process, the ground station does not necessarily have to know which files are already downloaded when scheduling and uploading this command. But it is recommended to check which of the files are successfully downloaded to avoid the deletion of the files that were not successfully downloaded. Note that each file is marked with a download flag. This flag can be easily configured, and hence set back from “downloaded” to “not downloaded”. Thus, the designated file will not be deleted and the download of the file can be repeated during the next contact. - Again, only one telecommand is needed to delete all files or all already downloaded files within the mass memory.
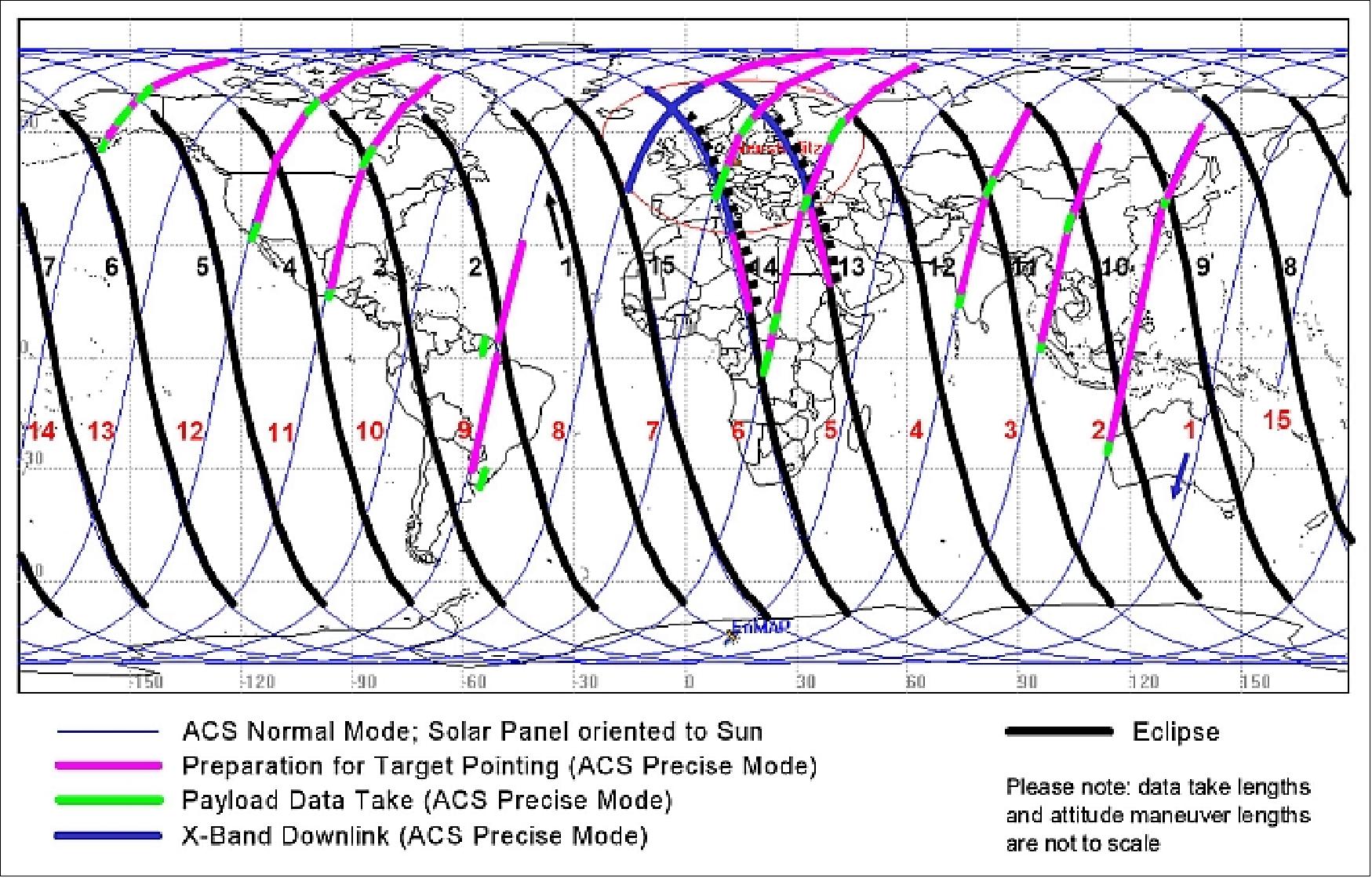
Nominal operation scenario: During the EnMAP mission quite complex daily operations scenarios of multiple, target driven imaging tasks are going to be performed. In Figure 28, an example of a nominal daily operations scenario including image acquisitions and data downloads is shown.
Regardless of the complexity of this scenario, the number of telecommands, which are necessary to perform the different tasks, is reduced to a minimum. In the depicted example, 21 imaging tasks, some of which with different pointing profiles, and 3 data downloads are performed, i.e., a total number of just 24 time-tagged telecommands have to be uploaded, plus the telecommands for the deletion of the files in the DSHA (Data Science Handling Assembly).
This minimized number of telecommands, which is enabled by usage of the one-telecommand philosophy of EnMAP, also supports the long-term scheduling and commanding of tasks, e.g. over the weekend, during which all scheduled tasks can be performed by the spacecraft autonomously without any mandatory ground intervention in-between.
Orbit control maneuver: Orbit control maneuvers are not a part of daily operations. Nevertheless the one-telecommand philosophy is applied here as well.
For an orbit control maneuver mainly the ACS (Attitude Control Subsystem) and the OCS (Orbit Control Subsystem) are involved. Again all necessary tasks are controlled by the on-board computer according to the telecommand being sent to the S/C.
The ACS needs to perform a precise maneuver similar to the maneuvers for image acquisition or payload data download. The S/C’s attitude has to be changed so that the thrusters will be fired in the correct direction. For the OCS, there are three main tasks that have to be controlled during the maneuver: thruster catalyst preheating, thruster activation and deactivation.
The TTTC for an orbit control maneuver includes the time to start the telecommand, time tags for activation/ deactivation of thrusters, and the necessary ACS guidance information.
In the case two orbit control maneuvers should be performed a minimum time offset is necessary. A determination of the changed orbit should be performed by the ground segment to ensure the maneuver has been performed correctly and the changes are as expected. In addition, the ACS subsystem requires a specific time to autonomously de-saturate the reaction wheels after one maneuver. Compared to the time needed for the orbit determination the time needed for reaction wheel desaturation is relatively small.
The attitude accuracy of the satellite during thruster firing is autonomously supervised onboard the satellite. The ground station can configure a limit value for the attitude deviation by a configuration command. If the satellite attitude deviation exceeds the configured limit value at any time during thruster firing, a current orbit control maneuver is autonomously aborted. Otherwise deviations of the satellite attitude during thruster firing would lead to deviations of all orbit parameters from the calculated target values. - As for the other maneuvers the orbit control maneuver is performed completely autonomously on board the S/C having sent only one telecommand (Ref. 20).
Ground Segment
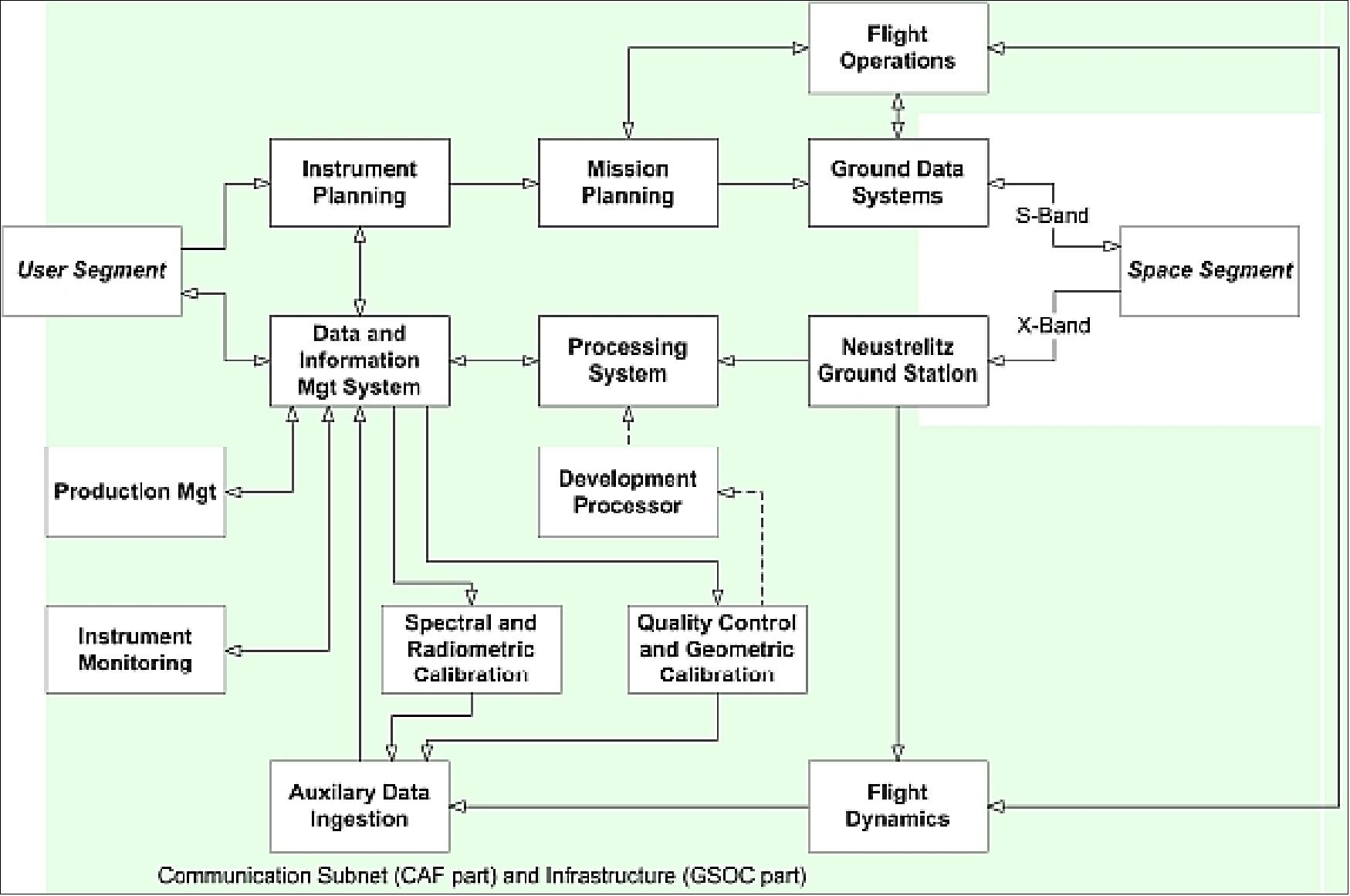
The ground segment is subdivided into three parts and comprises the following systems (Ref. 42) 52) 53) 54) 55) 56) 57)
• The MOS (Mission Operations System) responsible for commanding and controlling the satellite and instrument.
• The PGS (Payload Ground System) responsible for data reception, handling, archiving and delivery as well as for the user interfaces for observation and product orders.
• The PCV (Processor, Calibration and Validation segment) responsible for processing of raw image data and identification of clouds in satellite images (L0 processor). Hence, the PCV results form together with the user observation request the basis for image acquisition planning and the resulting cloud contamination of images.
The EnMAP space segment will rely on common RF equipment (standard S-band and X-band links), and will be completely compliant with the existing German ground segment infrastructure at DLR, i.e. mission control at GSOC in Oberpfaffenhofen (Weilheim station support for TT&C services), and imagery data reception via the Neustrelitz, and other DLR X-band ground stations. The processing and archiving functions are allocated to DFD (German Remote Sensing Data Center).
EnMAP is conceived as a science and research mission and a pathfinder to evolve towards an operational/commercial service. The primary and immediate targets are the science community with its specific needs for research and development and the value adding companies offering information of great interest and use by public and commercial sectors.
In addition, there are value-adding companies in the EnMAP team on the commercial applications side (GAF AG, Vista, Definiens, etc.). RapidEye AG is contributing the synergy of EnMAP with RapidEye's 5 satellite constellation of high resolution, multispectral imagers (launch of RapidEye constellation on August 29, 2008).
Data System
The fully automatic operational processing chain will be integrated into the multimission processing, (long-term) archiving and distribution facility for Earth observation products at DLR. Figure 30 shows an overview of the processing chain including the interdependencies with calibration and data quality control.
Tue transcription and screening processor (Level 0) generates internal products that are not available to users and mainly collects the information from the different data streams, screens the image and housekeeping data quality, tiles the data take, annotates the tiles with quality and search information, and archives the raw data product. Tue hyperspectral image data are first de-compressed and the dark current measurements, acquired before and after each data take sequence, are extracted and stored separately as a dark current product for calibration and monitoring purposes. In the case of Earth observation, the data take (lengths up to 1000 km) is tiled to a size of 1000 x 1024 pixels (approximately 30 km x 30 km). Only these tiles are archived long-term, whereas higher-level products are produced only on demand. Data quality is monitored in a screening process, which extensively uses the information in the housekeeping data. Quality masks and measures, such as bad or suspicious pixels, cloud and haze mask, water-land mask, image acquisition mode, image acquisition condition, corner coordinates, are derived and archived together with the image data, which finally provide advanced selection criteria for image orders by the international user community.
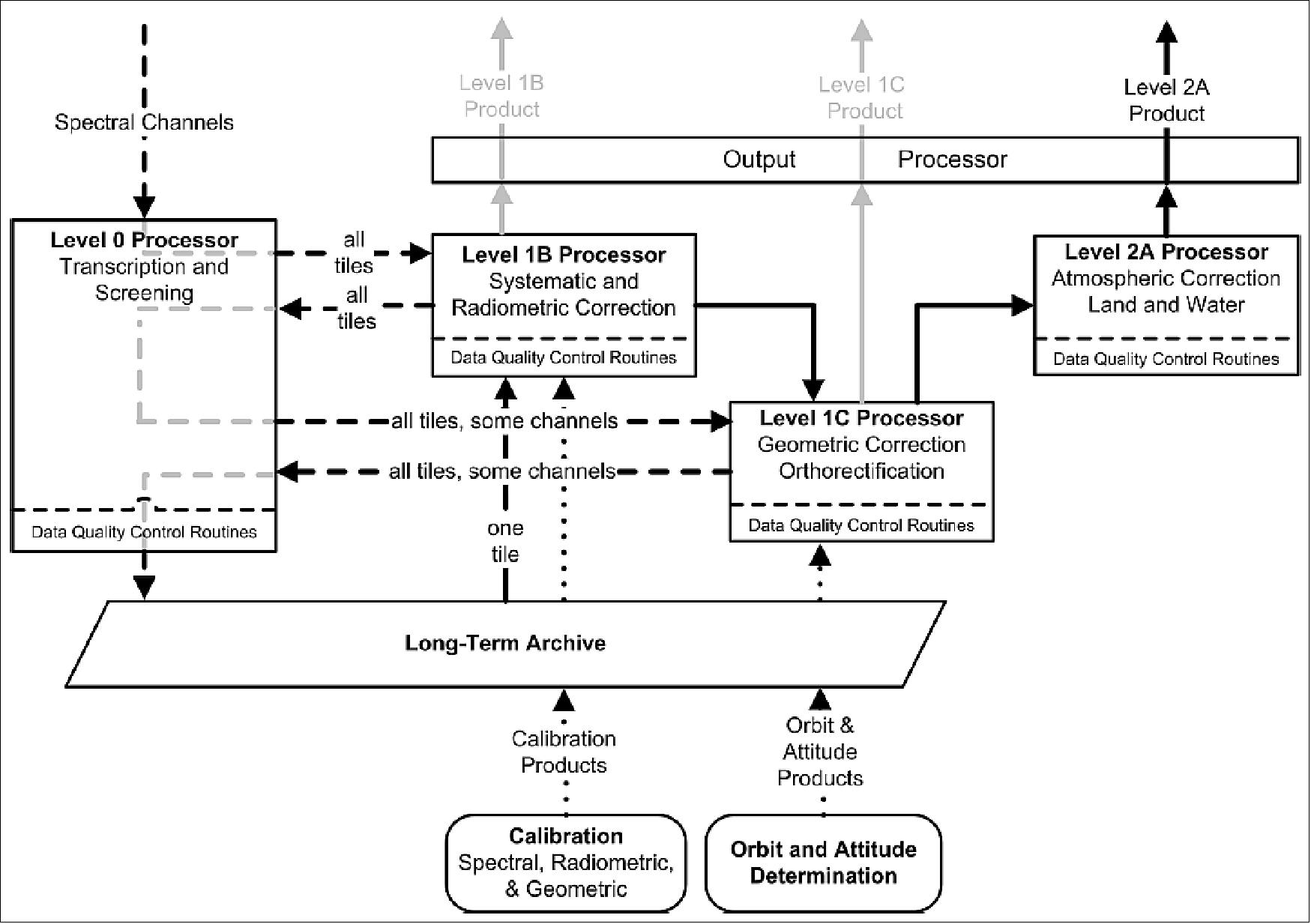
The systematic and radiometric correction processor (Level-1B) corrects the raw hyperspectral image (HSI) data for systematic effects and converts them to physical at-sensor radiance values based on the currently valid calibration tables. Tue correction includes the following sub-tasks:
- Saturated pixel detection (including blooming with recovery)
- Suspicious pixel detection and dead pixel registration
- Nonlinearity response correction (spatial and spectral direction) based on lookup tables
- Electronic offset correction and dark current subtraction based on corresponding measurements at the start and end of the data take
- Photo response non-uniformity (PRNU) correction (spatial and spectral direction, flat fielding)
- Gain matching for the VNIR spectrometer, because low and high gain are automatically selected
- Spectral stray-light correction (spectral direction, de-convolution)
- Spatial stray-light correction (spatial direction, de-convolution)
- Spectral referencing to assign bands with wavelength information
- Radiometric conversion to at-sensor radiance values, and
- Annotation of data quality information in the form of masks and parameters.
Tue output products are at-sensor radiance data. Quality layers (e.g., bad-pixel masks, land/water mask, cloud mask) and meta data (e.g., orbit and attitude measurements, geometric calibration values, spectral band information) are attached for further processing by the customer.
Tue orthorectification processor (Level-1) produces ortho-images, employing the technique of the rigorous model of DG (Direct Georeferencing). A linear pointing knowledge (independently in each of the two horizontal directions) of 100 m at nadir is specified. For each pixel, the two angles completely describe the internal camera geometry. This also includes (possible) geometric keystone effects. Because the data acquisition from the VNIR and SWIR spectrometers is realized with the method of in-field separation using two parallel entrance slits, a difference in viewing angles of approximately 0.05° occurs. This leads to an acquisition delay of 86 ms for the same location on Earth, corresponding to 600 m on the ground. As the satellite attitude changes slightly during this time, a co-registration error between VNIR and SWIR data is obtained.
In order to achieve the required coregistration accuracy of less than 0.2 pixel, the reconstruction of the attitude for each scan line is based on approximation techniques, leading to eo-registration accuracy of about 0.1 pixel. For image orthorectification, a global DEM (Digital Elevation Model) database serves as input for the terrain correction process. Finally, users can select a map projection system (e.g., Universal Transverse Mercator (UTM) with the zone derived from the center coordinates of the scene as well as the neighboring zones or geographic projection). Within the map projection system, image resampling is performed towards 30 m pixel spacing in the case of UTM and 1 arc sec in the case of geographic projection. Different selectable resampling methods for generating the final orthorectified products are offered to the customer.
The VNIR and SWIR data are independently orthorectified and finally merged to a consistent product. Tue geometric accuracy of the orthorectification is crucial for overlaying the data with existing data sets and maps or adding them to GIS (Geographic Information Systems) for evaluations like change detection, map updating, or for enhanced atmospheric correction using terrain information. Therefore, an improvement of the sensor model is achieved with GCPs (Ground Control Points) extracted automatically from reference images of superior geometric quality using image-matching techniques. In a first step, tie points between the HSI uncorrected image and a reference image are determined by matching. Because optical data serve as reference, intensity-based and object-based matching are applied. By complementing the tie points found with interpolated DEM height values, a set of fully qualified GCPs can be derived. In a second step, the GCP sets serve as input to improve the line-of-sight model parameters in a least squares adjustment process. Different levels of GCP outlier detection are included in the matching processes as well as in the least squares adjustment or sensor model parameters.
Tue atmospheric correction processor (Level-2A) employs separate algorithms for land and water applications. Tue choice of the land and/ or water mode is defined by the user. Scenes may also be processed in both modes; for example, for coastal areas or inland lakes that may contain a large percentage of both land and water pixels. For atmospheric correction over land, combined atmospheric and topographic processing is feasible, which is only possible for scenes with better than one-pixel geometric accuracy to avoid artefacts caused by inaccurately registered DEMs and orthorectified images. Relevant criteria for the selection of a radiative transfer code are spectral coverage of the radiative transfer calculations, spectral resolution, aerosol models, and treatment of gas absorption and multiple scattering. The MODTRAN-5 (moderate resolution atmospheric transmission) code covers the solar reflective spectrum from 400 nm to 2500 nm, and it supports a sufficiently high spectral resolution for the absorbing gases ( water vapor, ozone, oxygen, carbon dioxide). lt also includes a rigorous treatment of the coupled scattering and absorption processes. Moreover, it offers a set of representative aerosol models (rural or continental, urban, maritime, desert). Therefore, MODTRAN-5 was selected to compile a database of atmospheric correction look-up tables with a high-spectral resolution of 0.6 nm to enable the processing of the 6.5 nm (VNIR) to 10 nm (SWIR) wide bands.
This fine spectral resolution database is resampled using the spectral response functions of the sensor. Tue image processing for land applications will be performed with the ATCOR (atmospheric correction) code, which accounts for flat and rugged terrain, including haze/ cirrus detection and removal algorithms and a spectral smile correction. A different strategy is employed for water applications exploiting the spectral properties of water. Tue low reflectance at wavelengths greater than 800 nm can be used to derive the aerosol map required for the retrieval of the water-leaving radiance map. A distinctive, physical feature of remote sensing of water objects is that visible (and partially near infrared) radiation penetrates the water body and is reflected back in the direction of the sensor not only by the water surface, but also by deeper water layers. In this context, the radiative transfer model for processing remote sensing water scenes should allow for the coupled treatment of radiation propagation in both atmosphere and water media. The MIP (Modular Inversion Program) is used, which combines the finite element method with the MODTRAN-5 atmospheric model and the multi-component water model. Output products will be surface reflectances, maps of aerosol optical thickness and atmospheric water vapor.
As product format for Level-lB/C and Level 2A, the user can chose an image format of BSQ, BIL, BIP, JPEG2000, or GeoTIFF, while the meta-data format is always Extensible Markup Language (XML). A product report in portable document format (PDF) is appended to the product.
With the advent of operational remote sensing services, there is an increasing demand for highly reliable, well-documented and standardized data products. In order to achieve this goal, operational data QC (Quality Control) and validation activities are essential. This comprises documented quantitative assessment of the geometric, radiometric, and spectral properties of the data products before the data is provided to the user. With this process, the valid functioning of the sensor and processing chain is investigated and, thus, ensured. In order to distinguish an anomalous from a nominal state of the instrument and processor, the uncertainty budgets related to the spectral, radiometric and geometric data product properties must be known. Therefore, a relevant data uncertainty analysis is also included as part of quality control. The operational processing chain investigates the specific quality of each data product ordered by the user. This is achieved by generating information, such as QC flag images (per-pixel quality measure) and meta-data (per-scene quality measure). An additional interactive QC analysis will be carried out on a regular basis. This is necessary because certain properties cannot be analyzed in a fully automated way.
EnMAP Product Generation
EnMAP level 0 (L0) image products (raw data) will be long-term archived while L1B products (systematically and radiometrically corrected data), L1C products (geometrically corrected data) and L2A products (atmospherically corrected data) will be processed on demand. The L1B processor corrects the hyperspectral image cube for systematic effects of the focal plane detector array, e.g. radiometric non-uniformities, and converts the system corrected data to physical at-sensor radiance values based on the currently valid calibration tables. The L1C processor creates ortho-images based on direct geo-referencing techniques implementing a line-of-sight model, which uses on-board measurements for orbit and attitude determinations as well as the sensor look direction vectors based on the currently valid calibration values. Furthermore, it is foreseen to automatically extract ground control points from existing reference data sets by image matching techniques to improve the geometric accuracy better than one pixel size. The L2A processor performs atmospheric correction and haze detection of the images by estimating the aerosol optical thickness and the columnar water vapor. Output products will be the ground reflectance cube and masks of land, water, haze, cloud and snow. 58) 59)
The EnMAP products are derived from tiled data takes of size 1000 x 1024 pixels (~30 km x 30 km), which are generated by the processing system on demand and delivered to the user community. Different product definitions (e.g. Committee on Earth Observation Satellites CEOS, European Space Agency ESA or from the different satellite data providers) are in common use, but a coherent assignment of the foreseen EnMAP product types to these definitions is not possible. Therefore the EnMAP standard product definitions are specified as follows:
• At-Sensor-Radiance Product (L1B): The product is radiometrically calibrated, spectrally characterized, geometrically characterized, quality controlled and annotated with preliminary pixel classification (usability mask). The auxiliary information (e.g. position and pointing values, interior orientation parameters, gain and offset) necessary for further processing is attached, but not applied.
• Orthorectified Product (L1C): The product is derived from the L1 product and geometrically corrected (correction of sensor, satellite motion and terrain related distortions) and re-sampled to a specified grid (orthorectified). Auxiliary data for further processing are attached, but not applied.
• Orthorectified and Atmospheric Corrected Product (L1A): The product is derived from the LevelC product, atmospherically corrected and the data converted to ground surface reflectance values.
Product | Definition |
Level 0 | Time-tagged instrument raw data with auxiliary information (internal) |
Level 1B | Radiometrically-corrected, spectrally- and geometrically-characterized radiance |
Level 1C | Orthorectified Level 1B |
Level 2A | Atmospherically-corrected Level 1C |
Typically, Level 0 products are contained in the archive allowing searching and ordering by users via an online interface at most 24 h after completion of the corresponding downlink. Afterwards, the processing and delivery of Level 2A products (Figure 31, solid lines), including geometric and atmospheric corrections, is typically conducted in at most 8 h. As the format for not long-term archived products, the user can choose an image format of band-sequential, band-interleaved-by-line, and band-interleaved-by-pixel encoding (BSQ, BIL and BIP, respectively), JPEG2000 and GeoTIFF, whereas the meta-data format is always Extensible Markup Language (XML). A report in portable document format (PDF) is appended to the product.
In order to generate 3 different EnMAP products delivered to a user (+1 internal product) there are 4 processors (Figure 31). The L0 product is always generated for long-term archiving in DIMS Product Library. The L1B, L1C and L2A products are generated by the processors called in different sequences and stored only temporarily on the pick-up points for delivery.
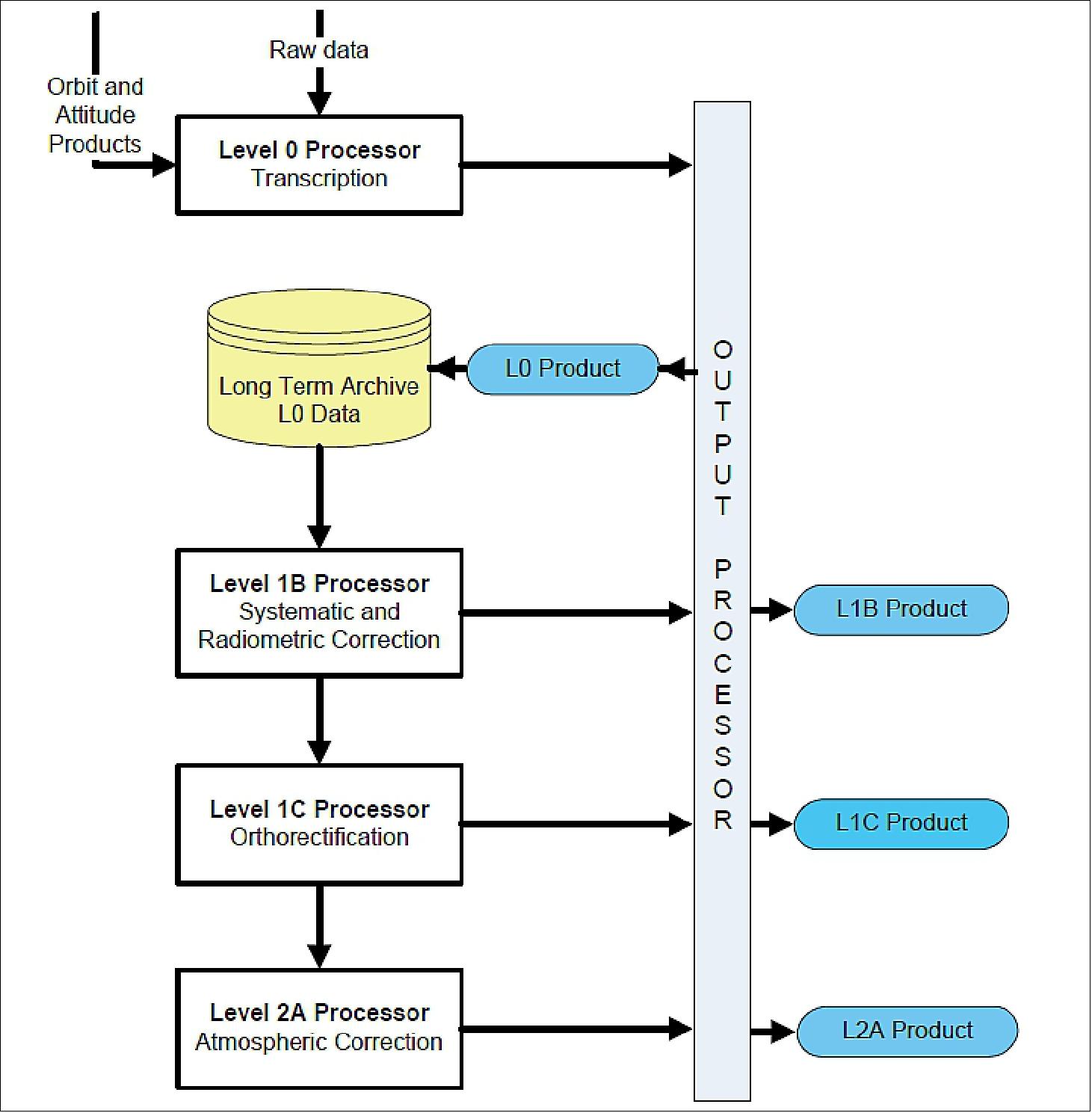
References
1) T. Stuffler, C. Kaufmann, S. Hofer, K. P. Förster, G. Schreier, A. Müller, A. Eckardt, H. Bach, B. Penné, U. Benz, R. Haydn, “The EnMAP Hyperspectral Imager - An Advanced Optical Payload for Future Applications in Earth Observation Programs,” Proceedings of the 57th IAC (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B.1.3.2, - also in Acta Astronautica, Vol. 61, June-August 2007, pp. 115-120
2) T. Stuffler, H. Kaufmann, S. Hofer, K. P. Förster, R. Graue, D. Kampf, H. Mehl, G. Schreier, A. Mueller, G. Arnold, H. Bach , U. Benz, F. Jung-Rothenhäusler , R. Haydn, “The Advanced German Hyperspectral Mission EnMAP,” Proceedings of the 31st International Symposium on Remote Sensing of Environment (ISRSE) at NIERSC (Nansen International Environmental and Remote Sensing Center), Saint Petersburg, Russia, June 20-24, 2005
3) T. Stuffler, C. Kaufmann, S. Hofer, H. Mehl, G. Schreier, A. Müller, G. Arnold, M. Langemann, H. Bach, B. Doll, U. Benz, R. Haydn, F. Jung-Rothenhäusler, “The Advanced Hyperspectral Mission EnMAP (Environmental Monitoring and Analysis Program) - Germany Prepares for the Future,” Proceedings of 55th ISF/IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAF-448
4) A. Eckardt, S. Hofer, C. Neumann, W. Skrbek, ”SNR estimation for advanced hyperspectral space instrument,” Optics & Photonics 2005, SPIE, San Diego, CA, USA), July 31-Aug. 4, 2005, SPIE Vol. 5883
6) C. Kaufmann, et al., “EnMAP: Environmental Mapping and Analysis Program,” 4th ESA CHRIS PROBA Workshop, Frascati, Italy, Sept. 19-21, 2006, URL: http://earth.esa.int/workshops/4th_chris_proba/CHRIS_WS4_KAUFMANN.pdf
7) http://www.ohb-technology.de/tl_files/ohb/pdf/broschueren/03_EnMAP-Flyer-en_2008-05.pdf
8) Hermann Kaufmann, Luis Guanter, Karl Segl, Stefan Hofer, Bernhard Sang, Andreas Mueller, Christian Chlebek, “The EnMAP Hyperspectral Imager - An Advanced Optical Payload for Earth Observation,” Second HyspIRI Decadal Survey Mission Science Workshop, Aug. 11-13, 2009, Pasadena, CA, USA
9) M. Kassebom, B. Penné, S. Mahal, P. Froehner, R. Greinacher, L. de Rocco, S. Hofer, K. P. Förster, Timo Stuffler, “EnMAP Satellite Bus - A Cost Effective Platform for Earth Observation Missions,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
10) http://www.dlr.de/en/desktopdefault.aspx/tabid-24/82_read-5867/
11) ”Preparing to Exploit the Science Potentials,” DLR, URL: http://www.enmap.org/sites/default/files/pdf/pub/EnMAP_komplett_web_eng.pdf
12) H. Kaufmann, S. Förster, H. Wulf, K. Segl, L. Guanter, M. Bochow, U. Heiden, A. Müller, W. Heldens, T. Schneiderhan, P.J. Leitão, S. van der Linden, P. Hostert, J. Hill, H. Buddenbaum, W. Mauser, T. Hank, H. Krasemann, R. Röttgers, N. Oppelt, B. Heim, “Science Plan of the Environmental Mapping and Analysis Program (EnMAP), Potsdam: Deutsches GeoForschungsZentrum GFZ, October 2012, 65 pp. Scientific Technical Report, URL: http://www.enmap.org/sites/default/files/pdf/pub/121026_EnMAP_SciencePlan_dpi150.pdf
13) http://speclab.cr.usgs.gov/spectral.lib06/
14) ”The Hyperspectral Earth Observation Satellite EnMAP – Platform and Project Status,” EnMAP Flyer, June 19-25, 2017, Paris LeBourget Airshow 2017
15) Stephan Strauss, Carsten Tobehn, Matthias Wieser, Amin Shahsavar, “A Generic Small Satellite Platform for High Performance LEO Missions - LEOBUS-1000,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
16) B. Penné, M. Kassebom, S. Mahal, P. Froehner , R. Greinacher, S. Hofer , K. P. Förster , T. Stuffler, “EnMAP Satellite Bus - A Cost Effective Platform for Advanced Earth Observation Missions,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
17) B. Penné, C. Tobehn, M. Kassebom, B. Ziegler, “A high agile satellite platform for Earth observation - performance description using new generation missions,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.4.03
18) C. Tobehn, B. Penné, M. Kassebom, B. Ziegler, S. Mahal, R. Greinacher, Frank te Hennepe, “Future Concepts for Earth Observation Missions,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.1.4
19) B. Penné, M. Kassebom, P. Froehner, K. Aßmann, S. Hofer, K. P. Förster, T. Stuffler, “EnMAP Satellite Bus – Status and Future Evolution,” 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011
20) K. Aßmann, M. Kassebom, P. Froehner, H. Bothmer, A. Hoffmann, E. Fitrianingsih, K. Lenfert, “Advanced On-Board Operations Concept – EnMAP Satellite Bus,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.B4.4.3
21) ”Hyperspectral satellite EnMAP ready for orbit,” OHB Press Release, 17 December 2021, URL: https://www.ohb.de/en/news/2021/hyperspectral-satellite-enmap-ready-for-orbit
22) Tobias Storch, ”EnMAP,” DLR, 13 December 2021, URL: https://www.dlr.de/eoc/en/desktopdefault.aspx/tabid-5514/20470_read-47899/
23) Jeff Foust, ”SpaceX launches fourth dedicated rideshare mission,” SpaceNews, 1 April 2022, URL: https://spacenews.com/spacex-launches-fourth-dedicated-rideshare-mission/
24) German satellite EnMAP launches successfully,” DLR News, 1 April 2022, URL: https://www.dlr.de/content/en/articles/news/2022/02/20220401_german-satellite-enmap-launches-successfully.html
25) Wikipedia 1April 2022, URL: https://en.wikipedia.org/wiki/List_of_spaceflight_launches_in_January%E2%80%93June_2022#April
26) https://www.dorbit.space/spacelust
27) ”Spacelust Mission Booklet, D-Orbit, 1 April 2022, URL: https://www.dorbit.space/_files/ugd/64a0e4_fe3190b9f3c74effbf2bbd01e3b09e4c.pdf
28) ”Turion Space and NanoAvionics to build a satellite for orbital reconnaissance missions” NanoAvionics News, 02 February, 2022, URL: https://nanoavionics.com/news/turion-space-and-nanoavionics-to-build-a-satellite-for-orbital-reconnaissance-missions/
29) ”Satellogic Announces Upcoming Launch of Five New Satellites Onboard SpaceX Transporter-4 Mission,” Satellogic, 10 March 2022, URL: https://satellogic.com/news/press-releases/satellogic-announces-upcoming-launch-of-five-new-satellites-onboard-spacex-transporter-4-mission/
30) ”ARCSAT, Improving tactical communication in the Arctic,” FFI, URL: https://publications.ffi.no/nb/item/asset/dspace:6776/FFIFakta_ARCSAT.pdf
31) ”Norwegian Defence Research Establishment (FFI) Awards a Launch Contract to Exolaunch for the ARCSAT Satellite,” EXOLaunch, 10 March 2022, URL: https://web.archive.org/web/20220813213538/https://exolaunch.com/news-block-50.html
32) ”Omnispace and Thales Alenia Space Announce Successful Launch of First Satellite Mission,” Omnispace Press Release, 1 April 2022, URL: https://omnispace.com/omnispace-and-thales-alenia-space-announce-successful-launch-of-first-satellite-mission/
33) ”Launching Towards Pixxel’s Hyperspectral Vision: Earth’s First Health Monitoring Constellation,” Pixxel Space, 1 April 2022, URL: https://www.pixxel.space/blogs/launching-towards-pixxels-hyperspectral-vision
34) ”D-Orbit Announces Upcoming Launch of SPACELUST, its Fifth ION Satellite Carrier Mission,” Globenewswire, 21 March 2022, URL: https://www.globenewswire.com/news-release/2022/03/21/2406742/0/en/D-Orbit-Announces-Upcoming-Launch-of-SPACELUST-its-Fifth-ION-Satellite-Carrier-Mission.html
35) ”Environmental mission EnMAP: Fraunhofer IOF contributed mirrors for the first German hyperspectral satellite,” Fraunhofer Press Release, 05 May 2022, URL: https://www.iof.fraunhofer.de/en/pressrelease/2022/enmap.html
36) ”EnMAP successfully completed its Launch and Early Orbit Phase (LEOP)!,” EnMAP news, 14 April 2022, URL: https://www.enmap.org/news/2022-04-14
37) S. Hofer, H. J. Kaufmann, T. Stuffler, B. Penné, G. Schreier, A. Müller, A. Eckardt, H. Bach, U. C. Benz, R. Haydn, “EnMAP Hyperspectral Imager: an advanced optical payload for future applications in Earth observation programs,” Remote Sensing for Environmental Monitoring, GIS Applications, and Geology VI, Edited by Manfred Ehlers and Ulrich Michel, Proceedings of SPIE, Volume 6366, Sept. 2006
38) H. Kaufmann, K. Segl, S. Chabrillat, S. Hofer, T. Stuffler, A. Mueller, R. Richter, G. Schreier, R. Haydn, H. Bach, “EnMAP - A Hyperspectral Sensor for Environmental Mapping and Analysis,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
39) T. Stuffler, K. Förster, S. Hofer, M. Leipold, B. Sang, H. Kaufmann, B. Penné, A. Müller, C. Chlebek, “Hyperspectral Imaging – An Advanced Instrument Concept for the EnMAP Mission (Environmental Mapping and Analysis Programme),” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.3.4
40) T. Stuffler, C. Kaufmann, S. Hofer, K.P. Förster, G. Schreier, A. Mueller, B. Penné, “The Hyperspectral Satellite and Program EnMAP (Environmental Monitoring and Analysis Program),” Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
41) K. Segl, L. Guanter, H. Kaufmann, “Forward Simulation of Hyperspectral Remote Sensing Images in the Frame of the EnMAP Mission,” Proceedings of the 6th EARSeL Imaging Spectroscopy SIG (Special Interest Group) Workshop, March 16-18, 2009, Tel Aviv, Israel
42) R. Müller, M. Bachmann, C. Makasy, A. de Miguel, A. Müller, A. Neumann, G. Palubinskas, R. Richter, M. Schneider, T. Storch, T. Walzel , H. Kaufmann, L. Guanter, K. Segl, T. Heege, V. Kiselev, “The Processing Chain and Cal/Val Operations of the Future Hyperspectral Satellite Mission EnMAP,” Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2010
43) Hermann J. Kaufmann, Karl Segl, Luis Guanter, Andreas Mueller, Stefan Hofer, Christian Chlebek, “EnMAP – An Advanced Optical Payload for Earth Observation,” Art, Science and Applications of Reflectance Spectroscopy Symposium, Boulder CO, USA, Feb. 23-25, 2010
44) Stefan Hofer, Klaus-Peter Förster, Bernhard Sang, Timo Stuffler, Boris Penné, Martin Kassebom, H. Kaufmann, Andreas Müller , Christian Chlebek, “EnMAP Hyperspectral Mission -The Space Segment,” Proceedings of the Hyperspectral Workshop 2010, Frascati, Italy, M;arch 17-19, 2010, ESA SP-683
45) Timo Stuffler, Stefan Hofer, Klaus-Peter Förster, Bernhard Sang, , Manfred Leipold, Josef Schubert, Kai Lenfert, Boris Penné, Martin Kassebom, Herman Kaufmann, Andreas Müller , Christian Chlebek, “Progress in the Advanced Hyperspectral Imaging Program EnMAP,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.3.5
46) Dominique Hübner, Stefan Hanna, R. Thöt, Kai-Uwe Gassmann, Markus Haiml, Andreas Weber, Luis-Dieter Haas , Johann Ziegler, Hans-Peter Nothaft; W. Fick, “Infrared focal plane detector modules for space applications at AIM,” Proceedings of SPIE Remote Sensing 2012, 'Sensors, Systems, and Next-Generation Satellites,' Edinburgh, Scotland, UK, Vols. 8531-8539, Sept. 24-27, 2012, paper: 8533-76
47) Timo Stuffler, Stefan Hofer, Stefan Föckersperger, Herbert Mosebach, “Status on advanced passive and active optical EO sensors in the German Space Programme- The hyperspectral instrument on EnMAP and the MERLIN laser radar,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.3.1
48) J. Kolmeder, A. Kuisl, B. Sang, M. Lettner, A. Godenir, M. Glier, M. Sornig, S. Fischer, ”Optical integration process for the Earth-Observing satellite mission EnMAP,” Proceedings of the ICSO 2016 (International Conference on Space Optics), Biarritz, France, 18-21 October, 2016, URL: http://esaconferencebureau.com/custom/icso/2016/index.htm
49) Hermann Kaufmann, Bernhard Sang, Tobias Storch, Karl Segl, Saskia Foerster, Luis Guanter, Markus Erhard, Brian Heider, Stefan Hafer, Hans-Peter Honold, Boris Penne, Martin Bachmann, Martin Habermeyer, Andreas Müller, Rupert Müller, Michael Rast, Karl Staenz, Christoph Straif, Christian Chlebek, ”Environmental Mapping and Analysis Program - A German Hyperspectral Mission,” in book : 'Optical Payloads for Space Missions,' Published Online: 20 November 2015, pp: 161-181, doi: 10.1002/9781118945179.ch7, John Wiley & Sons, Ltd., URL: http://dx.doi.org/10.1002/9781118945179.ch7
50) Luis Guanter, Hermann Kaufmann, Karl Segl, Saskia Foerster, Christian Rogass, Sabine Chabrillat, Theres Kuester, André Hollstein, Godela Rossner, Christian Chlebek, Christoph Straif, Sebastian Fischer, Stefanie Schrader, Tobias Storch, Uta Heiden, Andreas Mueller, Martin Bachmann, Helmut Mühle, Rupert Müller, Martin Habermeyer, Andreas Ohndorf, Joachim Hill, Henning Buddenbaum, Patrick Hostert, Sebastian van der Linden, Pedro J. Leitão, Andreas Rabe, Roland Doerffer, Hajo Krasemann, Hongyan Xi, Wolfram Mauser, Tobias Hank, Matthias Locherer, Michael Rast, Karl Staenz, Bernhard Sang, ”The EnMAP Spaceborne Imaging Spectroscopy Mission for Earth Observation,” Remote Sensing, 2015, Vol. 7, pp:8830-8857, doi:10.3390/rs70708830, URL: http://www.mdpi.com/2072-4292/7/7/8830/pdf
51) J. M. Fontenla, J. Harder, W. Livingston, M. Snow, T. Woods, ”High-resolution solar spectral irradiance from extreme ultraviolet to far infrared,” Journal of Geophysical Research: Atmospheres, Volume 116, Issue D20, 27 October 2011, DOI: 10.1029/2011JD016032
52) Karim Lenhard, Jochen Fries, Birgit Suhr, Peter Gege, Andreas Müller, Tobias Storch, Armin Braun, Helmut Mühle, Rupert Müller, “Hyperspektral in Oberpfaffenhofen: Das EnMAP Bodensegment und die CHB,” URL: http://elib.dlr.de/57365/1/EnMAP_CHB_de.pdf
53) R. Müller, M. Bachmann, C. Makasy, A. de Miguel, A. Müller, A. Neumann, G. Palubinskas, R. Richter, M. Schneider, T. Storch, T. Walzel, H. Kaufmann, L. Guanter, K. Segl, “EnMAP - The Future Hyperspectral Satellite Mission, Product Generation,” ISPRS Hannover Workshop 2009, 'High-Resolution Earth Imaging for Geospatial Information,' Hannover, Germany, June 2-5, 2009, URL: http://www.isprs.org/proceedings/XXXVIII/1_4_7-W5/paper/Mueller_R-183.pdf
54) Tobias Storch, Sabrina Eberle, Christine Makasy, Simon Maslin, Amaia de Miguel, Klaus-Dieter Missling, Helmut Mühle, Rupert Müller, Sabine Engelbrecht, Jörg Gredel, Andreas Müller, and the EnMAP Team, “On the Design of the Ground Segment for the Future Hyperspectral Satellite Mission EnMAP,” Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, March 6-13, 2010
55) Robert Axmann, Sabrina Eberle, “Missionplanning and Operational Constraints and their Resolution for EO Missions like EnMAP,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2218
56) M. Habermeyer, T. Storch, S. Eberle, C. Makasy, S. Maslin, A. de Miguel, K.-D. Missling , H. Mühle, R. Müller, S. Engelbrecht, J. Gredel, U. Heiden, and the EnMAP Team, “Ground Segment Design of the EnMAP Hyperspectral Satellite Mission,” Proceedings of the Hyperspectral Workshop 2010, Frascati, Italy, M;arch 17-19, 2010, ESA SP-683
57) Tobias Storch, Martin Habermeyer, Sabrina Eberle, Helmut Muhle, Rupert M. Mueller, ”Towards a critical design of an operational ground segment for an Earth observation mission,” Journal of Applied Remote Sensing, Volume 7, Issue 1, 7 March 2013, doi: 10.1117/1.JRS.7.073581
58) Gintautas Palubinskas, Martin Bachmann, Emiliano Carmona, Birgit Gerasch, Harald Krawczyk, Aliaksei Makarau, Mathias Schneider, Peter Schwind, ”Image products from a new German Hyperspectral Mission EnMAP,” Proceedings of IGTF 2017 (Imaging & Geospatial Technology Forum 2017) ASPRS Annual Conference, Baltimore, Maryland,USA, March 12-16, 2017, URL: http://elib.dlr.de/105951/1/Palubinskas_IGTF2017%20.pdf
59) T. Storch, U. Heiden, H. Asamer, D. Dietrich, T. Fruth, P. Schwind, A. Ohndorf, G. Palubinskas, M. Habermeyer, S. Fischer, C. Chlebek, ”EnMAP – From Earth Observation Request, Planning, and Processing To Image Product Delivery,” 10th EARSeL SIG Imaging Spectroscopy Workshop, 19 - 21 April 2017, Zürich, Switzerland
Spacecraft Launch Sensor Complement Ground Segment References Back to top