ELSA-d (End-of-Life Service by Astroscale Demonstration)
Non-EO
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Mission complete |
| Launch date | 22 Mar 2021 |
| End of life date | 04 May 2022 |
ELSA-d (End-of-Life Service by Astroscale Demonstration) - on Soyuz-2 Rideshare Mission
Spacecraft CONOPS (Concept of Operations) Launch Mission Status Ground Segment References
Astroscale UK Ltd is part of Astroscale Pte Ltd, a Singapore-based satellite services company that was founded in 2013 with the objective of developing innovative solutions against the growing number of space debris. The company’s mission is to actively contribute to the sustainable use of the space environment by developing scalable and innovative on-orbit technologies, in order to safely remove the most threatening debris in orbit. 1)
In November 2017, Astroscale Pte Ltd (with HQs in Singapore) and SSTL (Surrey Satellite Technology Ltd. of Surrey, UK) signed a Memorandum of Understanding to pursue joint opportunities in areas of innovative on-orbit technologies and missions designed to safeguard the orbital environment for future generations. 2) 3) 4) 5)
Astroscale and SSTL have agreed to long-term strategic cooperation that further positions the companies to compete globally in the growing small satellite and orbital debris removal markets. Together the companies will seek to identify ambitious debris removal projects and joint offerings for competitive small satellite missions in Japan. As a first step, Astroscale has contracted SSTL to supply a “Target” satellite and avionics for its inaugural End-of-Life Service by Astroscale-demonstration (ELSA-d) mission, which will simulate capture of orbital debris and is designed to validate key technologies for end-of-life spacecraft retrieval and disposal services.
Astroscale hopes to establish a long-term presence in the UK, starting with the establishment earlier this year of an office and mission control center in Harwell. This cooperation will lead to further investment in the UK, including potential establishment of a supply chain.
“We are very excited to welcome SSTL to the ELSA-d mission and to begin this ambitious strategic partnership,” said Nobu Okada, Founder and CEO of Astroscale. “SSTL is synonymous with reliable and cost-effective small satellites and we are thrilled that they will provide a key component to ELSA-d. We are confident that this is only the beginning of mutually beneficial long-term relationship.”
Sir Martin Sweeting, Executive Chairman of SSTL added, “We are extremely pleased to be working with Astroscale, a like-minded, innovation-driven company seeking to make space business viable for commercial operators. This practical solution to debris mitigation has the potential to provide a cost-effective approach for ensuring the long-term sustainability of the space environment for all.”
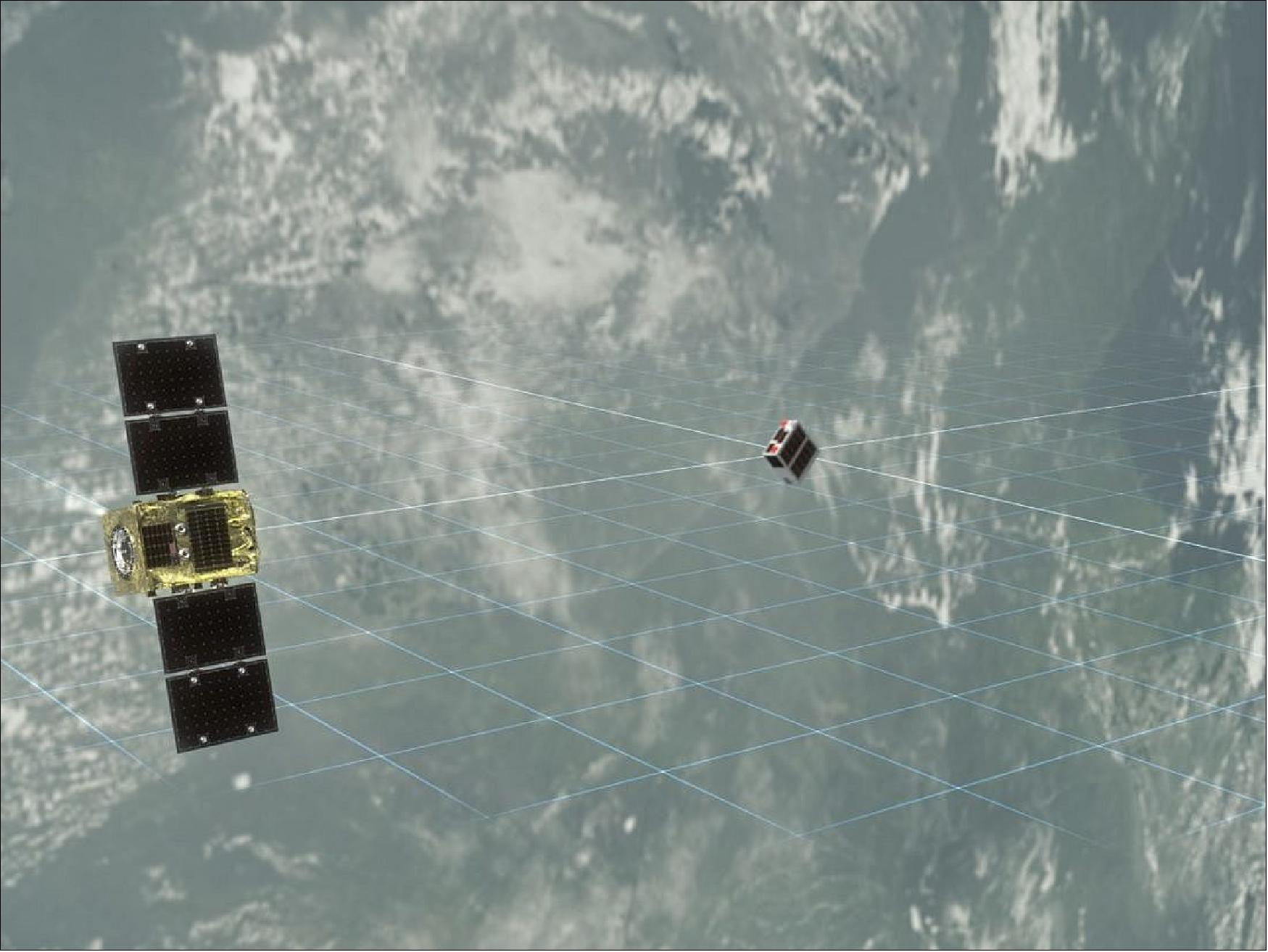
The ELSA-d mission comprises of a “Chaser” satellite (Astroscale) and the Target satellite (SSTL), and will demonstrate key technologies necessary for orbital debris removal such as rendezvous & docking and proximity operations. Astroscale will design and manufacture the Chaser at its R&D office in Tokyo, using avionics from SSTL. It will be equipped with optical sensing instruments and a redundant capture mechanism.
The small satellite remote sensing and orbital debris removal markets are predicted to grow significantly in the coming years. By agreeing to long-term strategic cooperation, Astroscale and SSTL are now positioned to take advantage of these opportunities and positively impact future generations.
The Target and the Chaser will be attached for launch and deorbit, but while on-orbit, will be deployed in a series of three increasingly complex separation and capture maneuvers using rendezvous and docking algorithms. A docking plate with optical markers will be attached to the Target, allowing the Chaser to identify and estimate attitude during the docking.
SSTL’s Target satellite incorporates S-band communications, GPS positioning, a 3-axis control system and laser retro-reflector. A variant of the SSTL-42 constellation platform family designed for operational missions in the 5-100 kg range, it will also fly an HD camera and lighting to record the capture sequences during eclipse.
Spacecraft
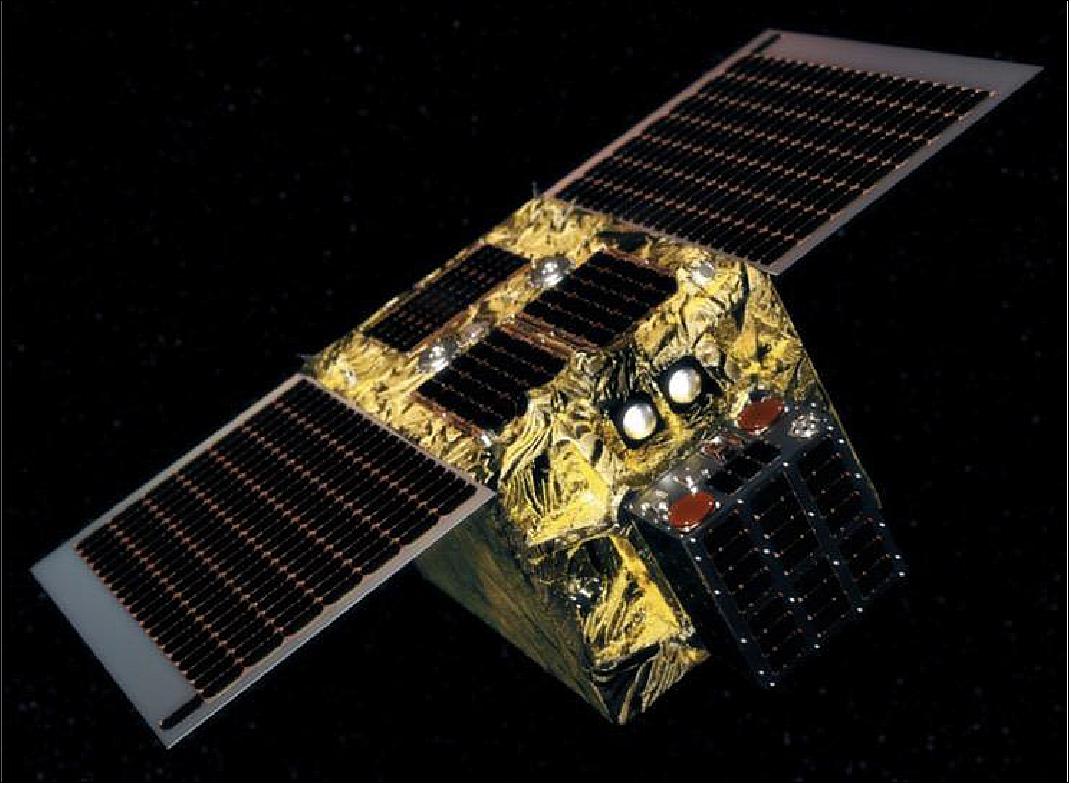
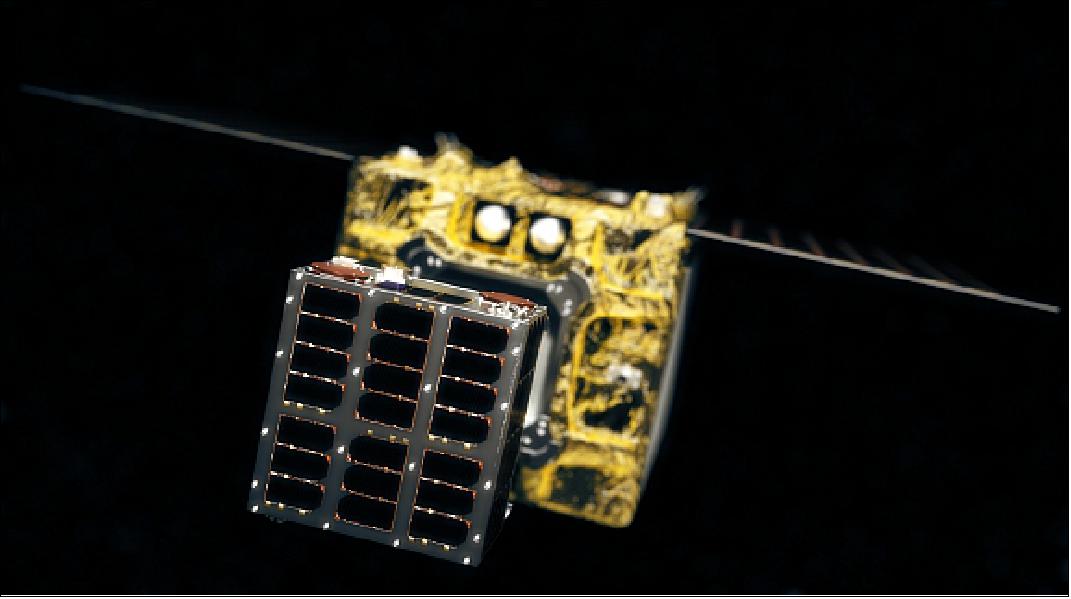
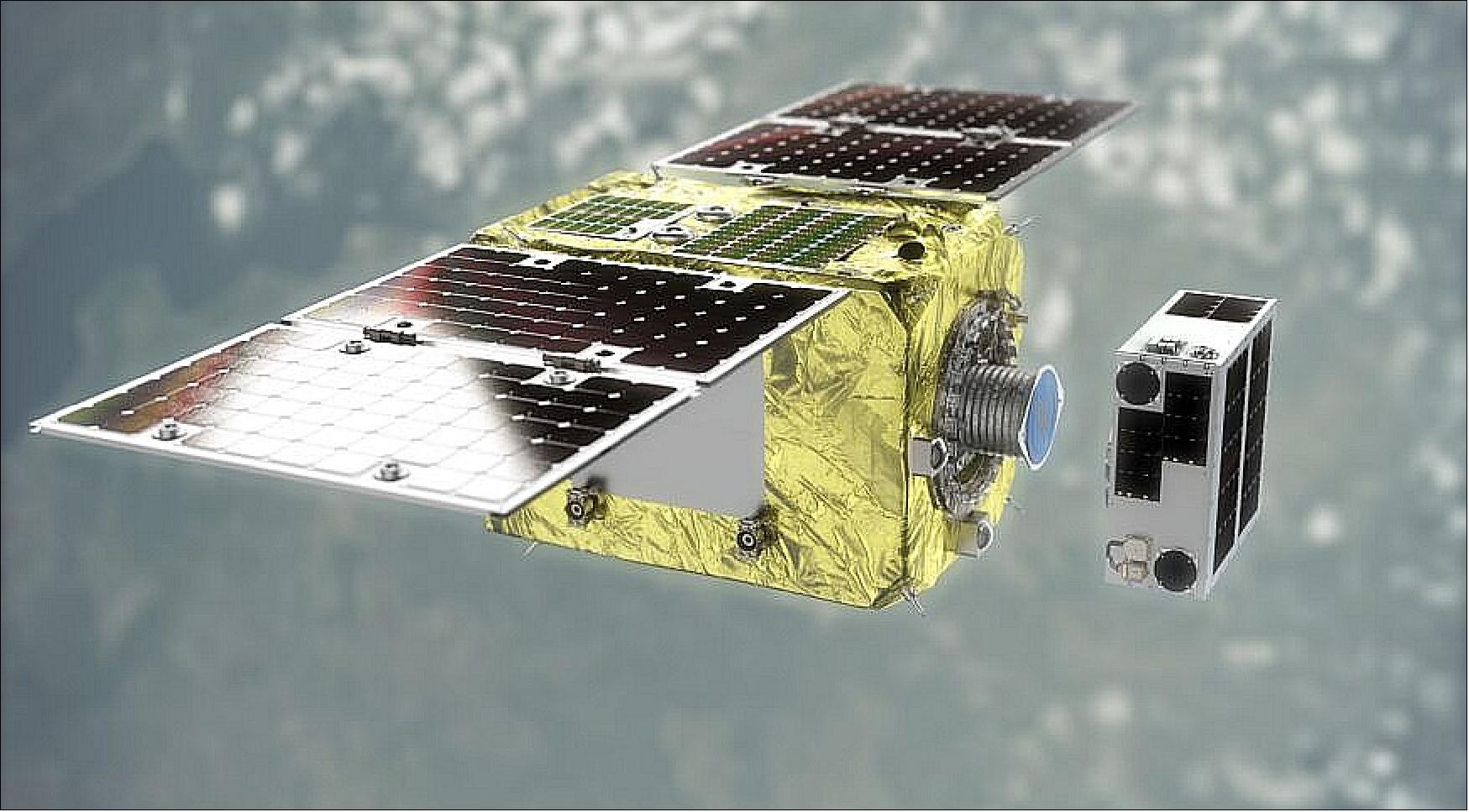
Astroscale is designing and developing the highly maneuverable ”Chaser” minisatellite of ~180 kg in its R&D office in Tokyo (Figure 1), using avionics from SSTL. In addition, SSTL is supplying the ”Target” microsatellite of ~ 20 kg (Figure 2).
ELSA-d is a twin small satellite mission scheduled to launch in 2020, which will demonstrate key rendezvous and docking technologies, and proximity operational concepts in readiness for provision of a commercial deorbit service in 2020 as constellations are starting production and deployment. These technologies and demonstrations are also highly relevant for in-orbit assembly missions. 6)
ELSA-d is an IOD (In-Orbit Demonstration) for key end-of-life technology and capabilities of future debris removal missions. In Astroscale, EOL (End-of-Life) and ADR (Active Debris Removal) have the following distinction: EOL is concerned with removal of future entities that are launched with a DP (Docking Plate) for semi-cooperative removal, while ADR is concerned with removal of existing entities in space that do not have a DP and are fully non-cooperative. 7)
The two ELSA-d spacecraft are launched stacked together. The chaser is equipped with proximity rendezvous technologies and a magnetic capture mechanism, whereas the target has a DP which enables it to be captured. With the chaser repeatedly releasing and capturing the target, a series of demonstrations can be undertaken including: target search, target inspection, target rendezvous, and both non-tumbling and tumbling capture. — ELSA-d will be operated from the UK at the National In-orbit Servicing Control Center Facility, developed by Astroscale as a key part of the ground segment.

The mission will validate an innovative capture mechanism, as well as the CONOPS (Concept of Operations) for capturing and removing non-tumbling and tumbling semi-controlled targets from orbit. The Target and the Chaser will be attached for launch and deorbit, but will be deployed while on-orbit in a series of three increasingly complex separation and capture maneuvers using rendezvous and docking algorithms. A docking plate with optical markers will be attached to the Target, allowing the Chaser to identify and estimate attitude during the docking.
SSTL’s Target satellite incorporates S-band communications, GPS positioning, a 3-axis control system and laser retro-reflector. A variant of the SSTL-42 constellation platform family designed for operational missions in the 5-100 kg range, it will also fly an HD camera and lighting to record the capture sequences during eclipse. These latter two technologies are potentially key technologies to support future in-orbit assembly operations.
Following successful demonstration, the “Chaser” spacecraft is intended to be mass produced to provide an on-demand service for constellation missions.
The ELSA-d mission is funded through private capital, and the project will address all the necessary regulatory aspects.
The key features of the mission are summarized in Table 1. The core constituents of the mission include a rendezvous (RDV) and docking suite and a magnetic capture system. Other elements include classical bus elements, such as power, propulsion, communications and processing.
Satellite | Item/Element | Description |
Chaser | Structure size, mass | ~ 0.6 x 1.0 m, ~180 kg |
GNC (command) | GNC OBC, GNC SHU (Sensor Handling Unit) | |
GNC (sensing) | star trackers, gyros, magnetometers, sun-sensors, accelerometers, GPS | |
GNC (actuation) | reaction wheels (pyramid), magneto-torquers | |
GNC (RDV) | night cameras, day cameras, laser ranging device, radiometric ranging device, illuminator | |
Capture | magnetic capture system | |
Communications | S-band, X-band | |
Power | deployable solar array, PCDU system, flight battery | |
Propulsion | green propellant chemical propulsion system, 8 thrusters | |
C&DH | BUS OBCs, CAN bridge, spacewire router | |
Other | retro-reflector, TSM (Target Separation Mechanism), TAU (Target Activation Unit) | |
Target | Satellite | ~20 kg satellite containing OBC, EPS, S-band COM, AOCS |
DP (Docking Plate) | DP mounted on target | |
Other | retro-reflector, witness camera, illuminator |
Key Commercial and Mission Factors
There were a range of key design factors for the ELSA-d mission. Being in an immature commercial and legal market, ELSA-d is a market leader in this domain. Astroscale attempts to engage in discussions with multiple parties to develop doctrine, standards, and regulation critical to active debris removal. 8)
• Astroscale is in discussions with the UK Space Agency (the mission licensing agency) to ensure a licensed chaser design.
• Astroscale is in preliminary discussions with UK insurance providers to understand future insurance standards in IOS (In-Orbit Servicing).
• Astroscale is part of various standardization and policy-development committees to ensure lessons learned are fed into future doctrine and that ELSA-d and future missions are in alignment with the future direction of policy.
• Astroscale interfaces with legal structures to ensure future design for legal compliance, including entities such as IADC (Inter-Agency Space Debris Coordination Committee) and UNCOPUOS (UN Committee on the Peaceful Uses of Outer Space).
A key design factor in ELSA-d is mission safety. These aspects encompass all areas across the mission development, including:
• Safety evacuations and passively safe trajectories (passive /active aborts, predefined evacuation point, protected safety ellipse insertion)
• Collision Avoidance Maneuvers (CAMs)
• Ground segment and operator oversight (including manual experimental abort)
• Protected critical mission functions (including reversion to higher levels of hardware and software authority)
• Safety critical computing [including multi-level FDIR (Failure Detection, Isolation and Recovery ), mostly fail-safe and some fail-operational]
• Architectural redundancy (some units are semi-hot redundant, some cold redundant)
• High-fidelity ground-based simulation (full on-ground simulation of all operational sequences before execution).
CONOPS (Concept of Operations)
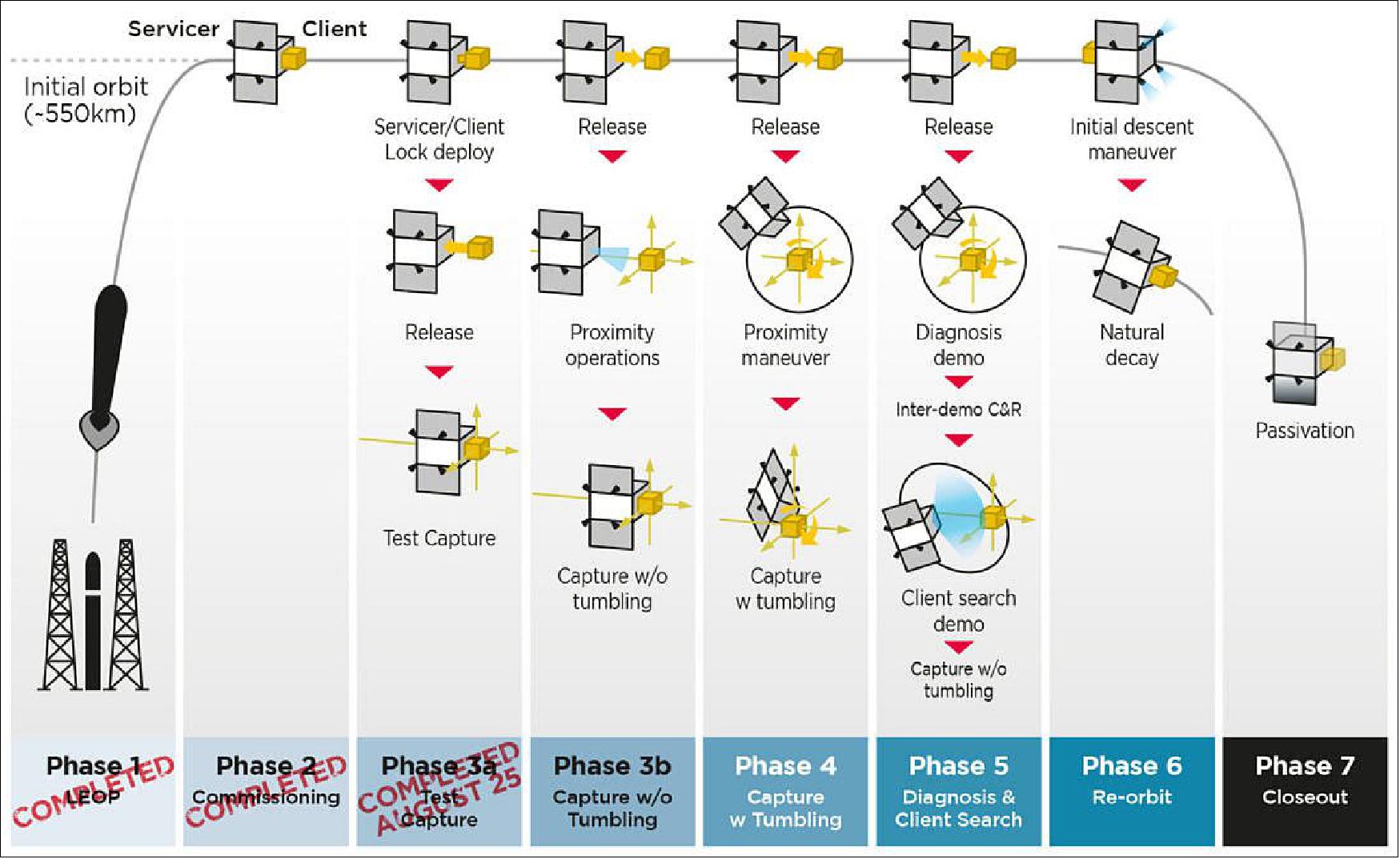
The mission CONOPS activities are shown in Figure 4 and are divided into 7 phases as follows. Between demonstration phases, when the chaser and target are docked, they can enter a routine phase which is power and thermal safe. The phases are designed to generally increase in complexity ensuring less risky demonstrations are attempted first.
Phase 1 to 2 - Launch and Commissioning
The chaser and target are launched together into the operational orbit of roughly 550 km. The chaser undergoes commissioning, testing interfaces with the ground segment, ensuring subsystems (where possible) are calibrated, and resulting in a system ready to start the demonstrations. The target is activated using the TAU (Target Activation Unit) and undergoes the majority of its commissioning prior to separation.
Phase 3 - Capture without Tumbling
A TSM (Target Separation Mechanism) holds the target and chaser together during launch and phase 3 is the first time the target is separated; once separated, the magnetic capture system is used to repeatedly capture and release the target, so the TSM is no longer in use. The majority of the target commissioning has already been undertaken, so any remaining commissioning is performed. The chaser has the ability to position itself at set distances behind the target, which are defined as specific holding points (these include for example Point A and Point B, 10 m and 5 m behind the target, respectively). At Points A and B, the chaser performs a navigation check-out and calibration using its rendezvous sensors. This is the first time these sensors can be tested in space, since they can’t be tested whilst the target is docked. Finally, the target is commanded to hold a set attitude and the chaser goes in for capture utilizing the docking plate on the target for guidance. There are several sub-phases of the final capture including target acquisition and tracking, and velocity, position and roll synchronization, but these are easier in the non-tumbling case than the tumbling phase 4 case.
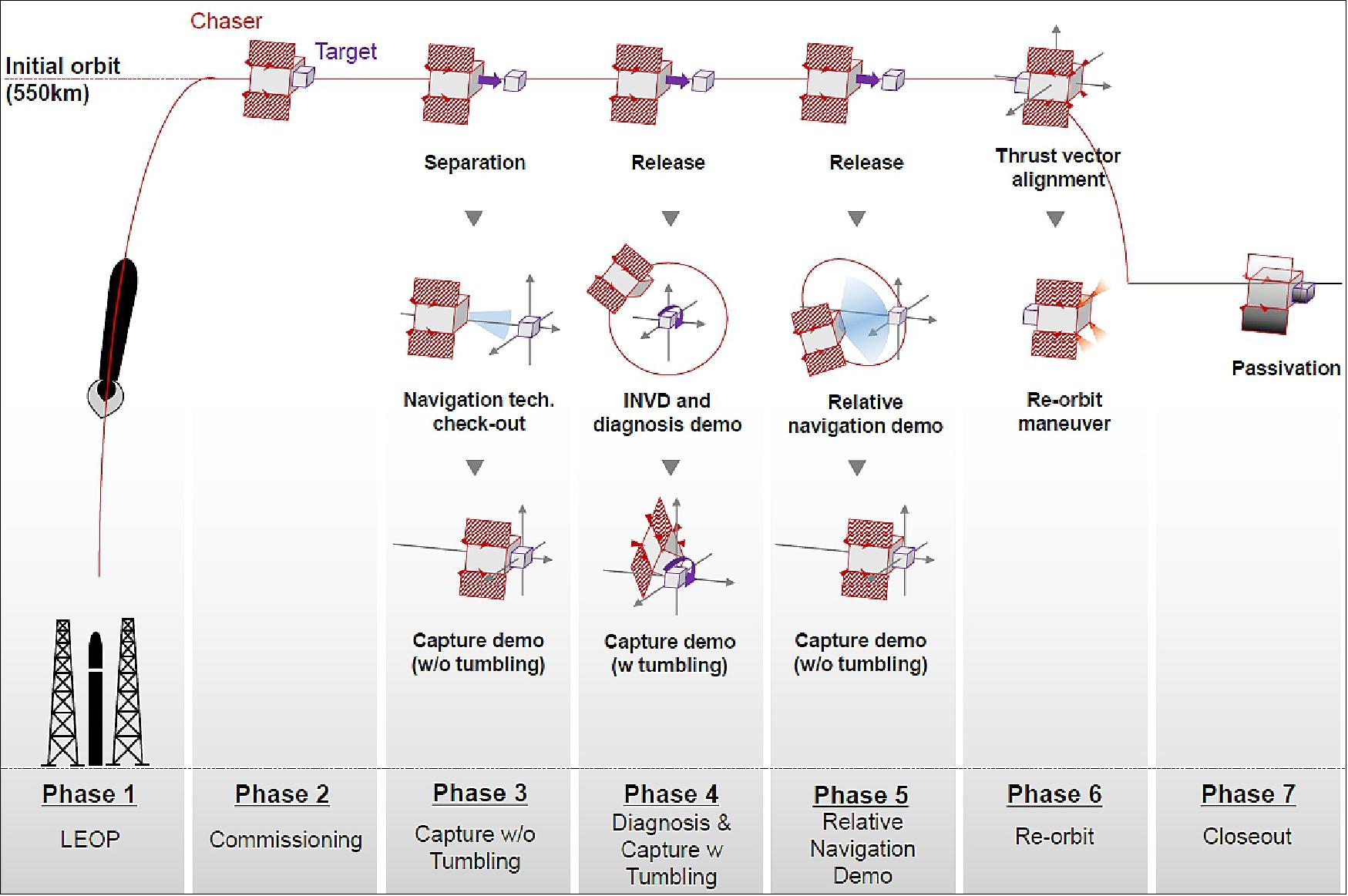
Phase 4 - Capture with Tumbling
This phase is the more dynamically complex version of phase 3. The phase also contains two sub-demonstrations - INVD and Diagnosis. INVD (Inertial Navigation Validation Demonstration) tests the full rendezvous sensor suite. Diagnosis is a fly-around performed to visually inspect the target. Diagnosis simulates a full service, where images of the target are taken and downloaded to the ground for operator inspection before capture. After these two demonstrations, tumbling capture is performed. The target is commanded to follow a natural motion tumbling attitude profile. The chaser performs the sub-phases of final capture listed in phase 3. Part of the capture involves taking images of the tumbling target which are downloaded to ground and post-processed to extract target attitude. There, the FDS (flight dynamics system) in the ground segment calculates a trajectory to move and orient the chaser with the target such that the chaser is always facing the target DP. The trajectory is uploaded and executed to align the chaser and target, whereby settling is then used for final alignment before capture.
Phase 5 - Relative Navigation Demonstration
This phase is a critical one in testing target search capabilities. The chaser separates and thrusts away from the target until its sensors lose the target at long range. The chaser moves into a safety ellipse, simulating first approach to an uncooperative target as in a full service mission. In a full mission, a combination of sensor data, including GPS and ground tracking, is used for the FDS to calculate a trajectory to insert the chaser on to a rendezvous trajectory with the target. In the ELSA-d mission, the FDS is still used but the demonstration is performed off-line. The chaser comes within a medium range of the target, eventually performing an absolute to relative navigation handover to transfer to relative navigation technologies and to make the final approach and non-tumbling capture.
Phase 6 to 7 - Re-orbit and Passivation
In the final phase, the chaser performs a re-orbit maneuver to reduce the target altitude. This simulates the final de-orbit in a full mission. At a lower altitude, the craft is passivated. Both chaser and target proceed to an uncontrolled de-orbit burning up on re-entry. The mission at all times maintains 25 year debris mitigation compliance, as the initial demonstration altitude is only 550 km. The full duration of the mission is expected to last up to 6 months, including non-demonstration (routine) phase periods.
Additional Demonstrations
In phase 3, as part of a safety test, a manual safety abort can be performed by the operator prior to capture to test an active abort scenario, which the chaser will perform if any fault conditions are identified during final rendezvous stages.
Subject to fuel availability, entire phases can be repeated. For example, phase 3 could be attempted twice to develop greater experience.
The mission CONOPS is designed in a fluid manner that give operators the final decision in spacecraft operations, and making up-to-date decisions about undertaking demonstrations based on satellite health and performance.
Capabilities and Technologies
Overview of Key Innovations
The following are key innovative capabilities in the ELSA-d mission.
1) End-to-end rendezvous solution including far-range and short-range approaches : Rendezvous and docking in space is among the most complicated technical challenges. To date, only manual docking or some limited autonomous docking (with many constraints) has ever been attempted in space (e.g. ATV, Orbital Express, ETS-7, Dragon). ELSA-d utilizes an integrated suite of technology for rendezvous and capture including both hardware (processing, sensing and control) and software (guidance and navigation algorithms, control laws), enabling these complicated scenarios to be undertaken in space efficiently and safely.
2) Search for targets and approach with absolute to relative navigation hand-over : Searching for and discovering an object in space is a complex technical challenge. ELSA-d’s search is performed by using absolute navigation (ground-based radar or optical methodologies plus the chaser’s GPS system) to get within a knowledge boundary. On first acquisition of the target, relative navigation is switched to in an absolute to relative navigation handover phase. Final approach is achieved using relative navigation.
3) Fly-around inspections of target with operator assessment : A fly-around (diagnosis) stage enables an operator to visually examine the chaser before final approach. This may be useful if communications with the target have been lost.
4) Docking plate to enable semi-cooperative removal : The DP is a core part of ELSA-d’s rendezvous suite, providing a point of contact on the target for a magnetic capture system, and also provides an optically controlled surface for GNC. The DP turns the capture into a semi-cooperative case, compared to the more complicated uncooperative case.
5) Magnetic capture of non-tumbling and tumbling targets : AS has developed an innovative magnetic capture technology for use in capture. The technology improves on the shortcomings of both tethered systems (tether dynamic issues, complexity / jamming of a reeling mechanism, difficulty in controlling target attitude) and robotic systems (degree of complexity, cost).
6) Re-orbit, de-orbit and passivation capabilities : ELSA-d uses chemical propulsion to provide both re-orbiting and de-orbiting capability. A re-orbit to a lower altitude simulates immediate evacuation from the operating altitude, which is needed in future missions to quickly take a satellite out of harms way from other satellites in that orbit.
7) Mission designed with safety evacuations and passively safe trajectories in mind : Mission safety is of paramount importance to ELSA-d to ensure there is no further debris generation in space. Safety is also a large part of having a licensed mission design. The mission’s range of safety features includes (but is not limited to): collision avoidance maneuvers (passive and active aborts), ability to move to an evacuation point, ability to enter a protected safety ellipse, and ground segment oversight during critical phases.
8) Ground segment designed specifically for in-orbit servicing : Unlike a conventional ground segment, ELSA-d’s ground segment is specifically designed with in-orbit servicing in mind. Features include the ability to chain and align ground station passes to service longer demonstration scenarios while providing operator-in-the-loop safety.
Magnetic Capture System
ELSA-d’s capture system enables magnetic capture of tumbling objects using a specialized capture mechanism. The system has a set of small concentric permanent magnets which are extended and retracted using a mechanism to allow connection with the docking plate on the target. Once it attaches to the docking plate, the capture system can also release when desired using an internal mechanism that slowly pushes the docking plate away. This enables repeated docking and undocking cycles.
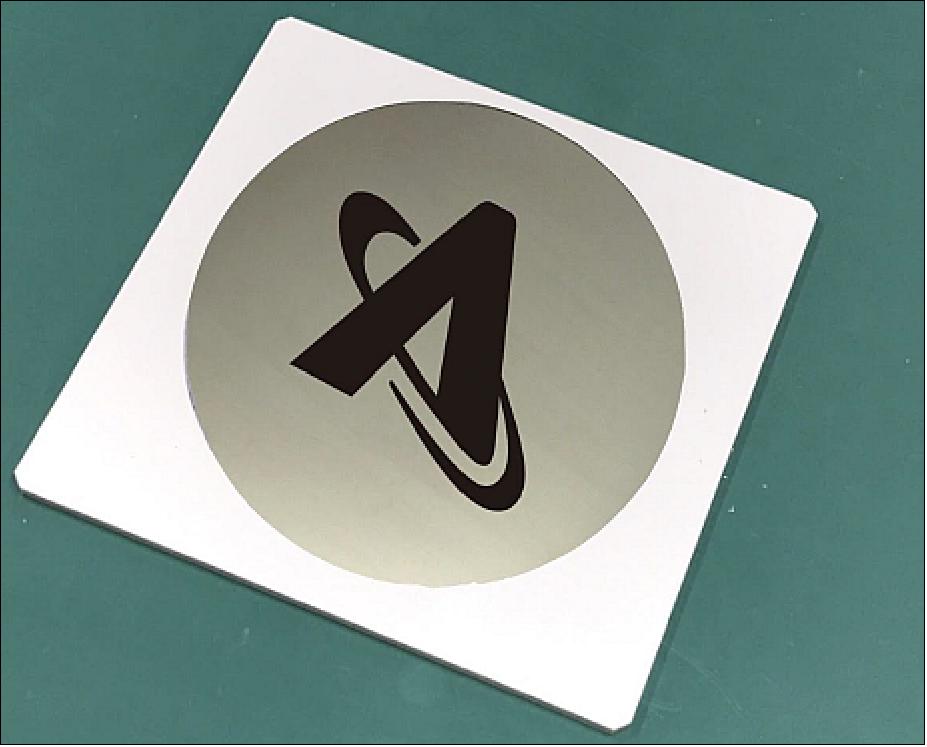
Docking Plate
The ELSA-d grappling interface is designed to be mounted on a target satellite and consists of a flat, disc-shaped DP (Docking Plate) on top of a supporting stand-off structure. It provides distinctive functions that make a defunct satellite easier to identify, assess, approach, capture, and de-orbit, thus minimizing future costs of removal. Specific characteristics of the Astroscale DP, shown in Figure 5, which facilitate navigation and capture include: optical markers for guidance and navigation in proximity operations, a flat reflective plane for precise distance and attitude measurement, and ferromagnetic material suitable for magnetic grappling concepts.
Development Status
• March 17, 2021: Astroscale will launch its End-of-Life Services by Astroscale demonstration (ELSA-d) mission from the Baikonur Cosmodrome in Kazakhstan on Saturday, March 20, at 6:07 am (UTC). ELSA-d will launch on a Soyuz rocket operated by GK Launch Services. 9)

• March 12, 2021: The End-of-Life Services by Astroscale demonstration (ELSA-d) mission has been licenced by the UK Space Agency this week. The ELSA-d launch, scheduled for Saturday, March 20 2021, will mark the world’s first commercial mission to demonstrate the core technologies and capabilities necessary for space debris docking and removal. 10)
- The ELSA-d mission presents a leading test case for licensing for future missions undertaking complex rendezvous operations in space, such as active debris removal. This licence approval by the UK marks an important regulatory advancement that places the UK Space Agency at the forefront of global licensing for in-orbit services and manufacturing (IOSM) missions.
- The UK Space Agency has issued the space licences under the UK Outer Space Act for both the ELSA-d servicer and client spacecraft. This is the first time, the UK Space Agency has licensed a company for an In-Orbit Service / End of Life demonstration space mission which involves close proximity and docking operations of two lower Earth orbit spacecrafts.
- Careful oversight and due diligence have enabled the ELSA-d mission to proceed to launch next week, whilst safeguarding the UK Government requirements. It is hoped this licence will pave the way for planned future Astroscale missions scheduled to deliver end-of-life and active debris removal services.
- This precedent should also assist other in-orbit servicing space industry partners, both in the UK and internationally, to apply for licences under UK legislation and regulation.
- Kumar Singarajah, Director of Government and Regulatory Affairs, Astroscale UK said, “This UK licence approval for the ELSA-d mission operations is an important milestone in support of Astroscale’s active debris removal commercial endeavors. This licence also positions the UK government as a global leader in support of commercially innovative in-orbit servicing programs designed to safeguard the sustainable use of space. We would like to express our appreciation to the UK Space Agency for their highly professional, thorough and timely review process.”
- John Auburn, Managing Director of Astroscale UK and Co-Chair of the UKspace In-orbit services and manufacturing (IOSM) working group said, ‘In-orbit servicing and manufacturing capabilities are fundamental to long term space sustainability. Without effective in-orbit servicing and manufacturing, space risks being over-exploited and under-managed, to the detriment of everyone. The support of the UK Space Agency is vital to help drive forward the changes needed in our regulatory and licensing approaches on space safety both in the UK and internationally. A successful ELSA-d mission will be a significant step towards providing Astroscale services to customers in a thriving space economy and boost global efforts to ensure a sustainable space ecosystem for future generations.’
• January 20, 2021: Astroscale Holdings Inc. today announced that its End-of-Life Services by Astroscale-demonstration (ELSA-d) satellite has arrived at the Baikonur Cosmodrome in Kazakhstan, ready for anticipated launch on March 20, 2021. ELSA-d will launch on a Soyuz rocket operated by GK Launch Services. 11)
- “We can now begin the final phase of pre-launch activities, including integration of the satellite on the rocket and operational control testing from our In-Orbit Servicing Control Centre in the U.K.,” said Nobu Okada, Founder and CEO of Astroscale. “Despite the challenges of navigating a global pandemic for the past year, our team has stayed focused and forged ahead with mission execution — learning, adapting and progressing with every milestone. With the arrival of ELSA-d to Baikonur, we’re one step closer to demonstrating our debris removal capabilities to the world. I am proud of our team and excited for the launch.”
- The ELSA-d mission is the first to demonstrate the core technologies necessary for space debris docking and removal, a major step towards expanding on-orbit services and achieving Astroscale’s vision of safe and sustainable space for the benefit of future generations.
• December 22, 2020: Astroscale Holdings Inc. (“Astroscale”) has shipped its End-of-Life Services by Astroscale demonstration (ELSA-d) satellite to Baikonur Cosmodrome in Kazakhstan for a March 2021 launch on a Soyuz rocket. 12)
- Shipment is always a significant milestone on any satellite development program,” said Gene Fujii, Astroscale Chief Engineer. “We have officially moved from the manufacturing phase to the launch and operations preparation phase, and we are eager to see ELSA-d in orbit.”
- ELSA-d is the first mission to demonstrate the core technologies necessary for space debris docking and removal, a major step towards expanding on-orbit services and achieving Astroscale’s vision of safe and sustainable space for the benefit of future generations.
- “Our journey to this point has been long, challenging, and rewarding — now begins a trailblazing journey for ELSA-d itself,” said Nobu Okada, Astroscale Founder and CEO. “A new era of space sustainability starts with this shipment, and watching ELSA-d leave our Tokyo headquarters was a powerful moment.”
- Founded in 2013, Astroscale is developing innovative and scalable solutions across the spectrum of on-orbit servicing missions, including life extension, in-situ space situational awareness, end-of-life services, and active debris removal, to create sustainable space systems and mitigate the growing and hazardous buildup of debris in space.

• November 18, 2020: Astroscale today announced that its End-of-Life Services by Astroscale-demonstration (ELSA-d) mission will launch on a Soyuz rocket operated by GK Launch Services from Baikonur Cosmodrome, Kazakhstan, in March 2021. 13)
- “We now have the launch in our sights,” says Seita Iizuka, ELSA-d Project Manager. “Publicly announcing this significant milestone is possible thanks to years of teamwork. The ELSA-d program demonstrates complex and innovative capabilities that will support satellite operators in realizing options for their post-mission disposal strategies and establish Astroscale as a global leader in the on-orbit servicing market.”
- Decreased launch and satellite development costs, an increasing global dependence on data from space and the rise of large commercial satellite constellations have led to a rapidly increasing population of objects in low Earth orbit (LEO). This growing use of space brings significant benefits to society but also greatly increases the threat of collision or break-up. This growing potential for additional debris creation endangers current and future satellite missions and puts society’s reliance on data from space at risk. ELSA-d will demonstrate a valuable service by safely removing defunct satellites from orbit to maintain the viability of LEO.
- The ELSA-d mission will demonstrate multiple dynamically complex capture activities necessary to remove defunct objects from orbit using an innovative approach consisting of a servicer (~175 kg) and a client (~17 kg), launched together. The servicer, equipped with proximity rendezvous technologies and a magnetic capture mechanism, will repeatedly release and dock with the client, which has been prepared with a ferromagnetic docking plate. Astroscale intends to prove the capabilities required for debris removal, including client search, inspection and rendezvous, and both non-tumbling and tumbling docking.
- Astroscale will operate ELSA-d out of the UK using the In-Orbit Servicing Control Centre National Facility (IOCC) developed by a team led by Astroscale. The IOCC, located at the Satellite Applications Catapult in Harwell, Oxfordshire, was developed specifically for satellite servicing missions. “Astroscale UK is proud to be operating this exciting mission,” says John Auburn, Managing Director of Astroscale’s UK office. “ELSA-d will be groundbreaking in so many ways — it will demonstrate the first semi-autonomous capture of a non-responsive, tumbling client, as well as the first identification of a client located outside the servicer’s sensor field of view.”
- While ELSA-d will most notably demonstrate the technical capabilities needed for orbital debris removal, the mission also highlights Astroscale’s efforts to drive the global conversation on policies and the business cases behind the on-orbit servicing ecosystem. With a space segment developed in Japan, a ground segment in the UK, launch from Kazakhstan, ground station support in multiple countries, and a team that spans five countries, Astroscale epitomizes international collaboration. Additionally, the company’s global supply chain and discussions with a growing list of potential customers are evidence of the commercial viability of this part of the space economy.
- “Our passionate and dedicated global team is excited to get closer to the launch of ELSA-d,” says Nobu Okada, Founder and CEO of Astroscale. “We’re on the brink of a new chapter in on-orbit servicing, and Astroscale is eager to take this important next step in demonstrating technical innovation, advancing the discussion on international policies and proving the business case.”
- Astroscale’s future missions include Phase I of the Japan Aerospace Exploration Agency’s Commercial Removal of Debris Demonstration (CRD2) project, scheduled to launch in early 2023, as well as the company’s first satellite life-extension platform in geostationary orbit.
• November 7, 2019: The ELSA-d mission comprises of a Chaser satellite and the Target satellite, and will demonstrate key technologies for orbital debris removal. SSTL has shipped a 16 kg Target satellite for Astroscale’s ELSA-d (End-of-Life Services by Astroscale -demonstration) mission to Tokyo, where it will be bolted to the Chaser satellite for environmental testing ahead of launch in 2020. 14)
- The ELSA-d mission is designed to simulate capture of orbital debris and validate key technologies for end-of-life spacecraft retrieval and disposal services. The Target and Chaser satellites will be attached for launch and de-orbit, but while on-orbit at 500-600 km they will be deployed in a series of increasingly complex separation and capture maneuvers using search, identification, rendezvous, docking, and de-orbit technologies.
- The ELSA-d Target satellite was designed and manufactured by SSTL in Guildford UK and incorporates S-band communications, GPS positioning, and a 3-axis control system. It will also fly an HD camera and lighting to record the capture sequences during eclipse. A ferromagnetic docking plate with optical markers is attached to the Target, allowing the ~180 kg Chaser satellite to identify and estimate attitude before deploying a capture extension mechanism with a magnetic plate to latch on to the Target satellite.
- While rendezvous has been performed in orbit in the past, ELSA-d will demonstrate the first semi-autonomous capture of a non-responsive, tumbling Target, as well as the first identification of a Target that is outside of the field of view of the relative navigation sensors on the Chaser.
- Once the demonstration concludes, the linked satellites will be moved to a lower orbit in readiness to re-enter the atmosphere where they will burn up.
- Sarah Parker, Managing Director of SSTL, said “It is vital that the international space community tackles the issue of space junk and therefore I am very pleased that SSTL is involved in Astroscale’s ELSA-d inaugural end-of-life spacecraft retrieval demonstration mission. We are looking forward to following the in-orbit operations of this milestone mission.”
- Nobu Okada, Founder & CEO of Astroscale, said “We are excited to receive SSTL’s Target satellite here at our Tokyo headquarters as we take the next step in this groundbreaking mission. We would like to thank SSTL for the commitment to ELSA-d and for working together to address the ongoing buildup of hazardous space debris in low Earth orbit.”

• October 10, 2019: Astroscale today announced it has entered the AIT (Assembly, Integration and Test) phase of its ELSA-d (End-of-Life Services by Astroscale-demonstration) mission, following completion of rigorous design reviews and subsystem testing. 15)
- “We are excited to be taking this next step in building our groundbreaking mission,” said Seita Iizuka, Project Manager. “ELSA-d is an incredibly complex satellite as we will be demonstrating rendezvous and proximity operations technologies that have never before been tested in space. This is not only a step toward orbital sustainability but is also an exciting challenge for our team of talented engineers.”
- ELSA-d, the world’s first commercial orbital debris removal mission to operate in LEO (Low Earth Orbit), consists of two spacecraft, a Servicer (~180 kg) and a Client (~20 kg), and will demonstrate dynamically complex capture activities necessary to remove defunct objects from orbit. During the mission the Servicer will repeatedly release and capture the Client using a magnet in a series of demonstrations which will prove the technology necessary for debris removal, including search, identification, rendezvous, docking, and eventual de-orbit. While cooperative rendezvous has been performed in orbit in the past, ELSA-d will demonstrate the first semi-autonomous capture of a non-responsive, tumbling Client, as well as the first identification of a Client that is outside of the field of view of the relative navigation sensors on the Servicer.
- The impending increase in the number of satellites in LEO means that the threat of a potential collision or break-up in orbit will escalate. This increased likelihood of increasing amounts of debris endangers current and future satellite missions and puts society’s reliance on data from space at risk. ELSA will be a critical service in safely removing defunct satellites from orbit and maintaining the viability of LEO.
- “There has been growing global recognition of the need for a solution to the orbital debris problem over the last several years,” said Nobu Okada, Founder and CEO. “ELSA-d is an important step in proving the technology necessary to mitigate the threat from space debris, but it is only one aspect of what Astroscale is doing to solve this issue. In addition to developing groundbreaking technology, Astroscale is working on the policy and business case solutions necessary for a maintaining a sustainable orbital environment and facilitating humanity’s access to space data for generations to come.”
- The AIT phase will be followed by environmental testing and conclude with launch. During the assembly phase, Astroscale will integrate subsystem equipment onto the satellite structure, including power, attitude control, propulsion, thermal control, communication and data handling, navigation sensors and the magnetic capture mechanism. The Client satellite will be mounted on the Servicer in early 2020.
• July 9, 2019: Astroscale has been awarded a contract under the Sunrise Project, a Public-Private Partnership led by ESA (European Space Agency) and OneWeb on a mission to connect the unconnected through a global satellite constellation. 16)
- The Sunrise Project, which is a part of the ESA ARTES program, was created to develop technologies for future generation telecommunication satellite missions and to advance ADR (Active Debris Removal) capabilities in low Earth orbit.
- Under the contract, Astroscale, which was selected for the program alongside other industry partners, will improve upon the heritage capabilities currently being developed for its ELSA-d ( End-of Life Services by Astroscale-demonstration) mission, a privately funded demonstration of technologies necessary for orbital debris removal. Astroscale’s Sunrise Project solution will mature the technology required in support of commercial ADR services and help lay the groundwork toward the ultimate goal of a sustainable orbital environment.
- The Astroscale contract is for a period of 12 months and is expected to be completed by April 2020.
• In December 2018, Astroscale UK signed a cooperation agreement with ESA (European Space Agency) to exchange data and expertise related to space debris collision avoidance, environmental monitoring of debris and the development of monitoring techniques. 17)
The Astroscale/ESA technical agreement relates to Astroscale’s ‘End-of-Life Service by Astroscale-demonstration’ (ELSA-d) mission. ELSA-d will consist of two spacecraft, a Chaser and a Target, stacked together for launch and initial deployment into orbit. Then, the Chaser will repeatedly release and capture the Target in a series of live demonstrations to prove the technology necessary for debris removal, including rendezvous and docking and proximity operations.
Under this no-funds-exchanged agreement, ESA will provide Astroscale with collision assessments for the ELSA-d Chaser satellite, including collision avoidance maneuver recommendations and screening. This is similar to the services provided for ESA’s own and other European missions by ESA’s Space Debris Office, located in Darmstadt, Germany.
ESA will also present a request for tracking support for the ELSA-d Target and Chaser satellites to the ILRS (International Laser Ranging Service), which will include both the Target and Chaser on the ILRS’ list of objects to be followed.
Astroscale will install satellite laser ranging reflectors on the Chaser and Target satellites to enable high-precision orbit determination and provide GPS measurements at least twice a day.
Director of Astroscale UK Ltd, John Auburn, commented, “Astroscale is launching its pioneering ELSA-d mission in early 2020 and is delighted to work with ESA in several crucial technical areas. ELSA-d is scheduled to be operational for around six months, so it is great to utilize its time in orbit to collect useful scientific data in addition to testing our de-orbiting technologies.”
The agreement also provides ESA with access to camera time over three observation periods. The camera will be used to test the principle of detecting small pieces of space debris crossing the field of view, which will generate important data to be used by ESA in developing a future, larger optical instrument. ESA and Astroscale will further work together on the feasibility of the observation approach and identify a workable solution.
In return, ESA will provide support and advice on its flight-proven ground control software products that will be used by ELSA-d, primarily through the review of mission control design documentation and advice on configuration and system validation and testing.
Launch
The ELSA-d mission (Chaser (Servicer) and Target (Client) as passenger payloads were launched on 22 March 2021 (06.07:12 UTC) on a Soyuz-2-1b Fregat-M vehicle, operated by GK Launch Services, from the Baikonur Cosmodrome, Kazakhstan. 18) 19)

Orbit
Sun-synchronous orbit, altitude of ~550 km. The full duration of the ELSA-d mission is expected to last up to 6 months, including non-demonstration (routine) phase periods.
Passenger payloads

• CAS500-1 (Compact Advanced Satellite 500-1) of KARI (Korea Aerospace Research Institute). A minisatellite of 500 kg with a high-resolution optical payload for Earth observation.
• ELSA-d of Astroscale, Japan. Two satellites, Chaser/Servicer (180 kg) and Target/Client (20 kg) to demonstrate the core technologies necessary for space debris docking and removal.
• Four GRUS smallsats of Axelspace, Japan. Earth observation at strict revisit rate.
• NAJM-1 smallsat, Saudi Arabia, is an experimental/educational small satellite pathfinder mission for low-duty cycle earth imaging and communication from LEO.
• DMSAT-1 smallsat is developed for the Mohammed Bin Rashid Space Centre to perform multi-spectral observations in the visible and near-infrared bands in order to detect and monitor aerosols in the upper atmosphere.
• Three ADELIS-SAMSON (1, 2, 3) smallsats, Technion, Israel Institute of Technology, are designed for demonstration of long-term autonomous cluster flight of multiple satellites and geolocation of the position of a terrestrial transmitter.
• Two Kepler 6/7 smallsats of Kepler Communications Inc., Canada They are designed for the wideband and high data-rate communication in Ku-band, as well as low-data rate narrowband communication in S-band. The spacecraft provide data transfer services to locations, assets, and IoT systems distributed across the globe with the Global Data Service (GDS) and EverywhereIoT services.
• NANOSATC-BR2 smallsat is a scientific, academic and technological satellite designed for monitoring of the Earth’s Ionosphere and Magnetic Field, Southern Regional Space Research Center, University of Santa Maria, Brazil.
• KMSL smallsat is a scientific satellite (experiments in microgravity), College of Engineering, Chosun University, Gwangju, Republic of Korea.
• Pumbaa and Timon smallsats are designed for obtaining images of solar corona—including the region that is 10 times the Sun’s angular diameter. Astrodynamics and Control Laboratory of Yonsei University, Seoul City, Republic of Korea.
• Four Beesat-5,-6,-7,-8 smallsats, TU (Technische Universität) Berlin, Germany.
• Hiber-3 smallsat, the Netherlands, are designed for the provision of satellite connectivity to “internet-of-things” (IOT) devices.
• Unisat-7 smallsat, GAUSS Srl, Italy, has been developed for the tryout of technology for the precise orbit insertion of small satellites of CubeSat format. The mission is based on the successful idea of acting first as an in-orbit deployer of third-party satellites, then operating as a flexible in-orbit demonstrator for space technology, while maintaining the telemetry RF link open for radio amateurs worldwide. UNISAT-7 will release six smallsats:
- Unicorn-1, tryout of technology for the precise orbit insertion of small satellites of CubeSat format, Germany
- DIY-1, test of deorbiting mechanism and verification of space qualification of the radio and solar cells, Argentina
- FEES, educational and scientific research satellite, Italy
- STECCO, educational and scientific research satellite, tryout of attitude control technology using the gravity gradient, Italy
- SMOG-1, Educational and scientific research satellite, Hungary
- BCCSAT-1, Educational and scientific research satellite, Thailand.
• The First smallsat of High School of Economics “NIU VShE — DZZ”. The NRU HSE Earth Observation spacecraft has been developed through joint efforts by the Moscow Institute of Electronics and Mathematics (MIEM) and SPUTNIX. The 3U CubeSat is equipped with an experimental camera based on the stepped (Fresnel) lenses developed by the Samara University, and with a high-speed X-range transmitter. MIEM students were responsible for qualification of the satellite’s control systems.
• 3U CubeSat of Sirius Center and NRU HSE. The spacecraft is equipped with an improved DeCor-type instrument to monitor quick changes in the space radiation fluxes. Researchers from the Sirius University and the Moscow University’s Scientific and Research Institute of Nuclear Physics are in charge of the project’s scientific component – handling the space radiation detector and mission’s mathematical algorithms.
• 6U CubeSat Zorkiy (Sputnix). The satellite is equipped with a high-resolution (up to several meters per a pixel) telescope camera manufactured by the Lepton Research and Production Association (NPO Lepton). This makes it stand out among other spacecraft of a similar size.
• SIMBA smallsat, Sapienza – University of Rome, Italy, is designed for monitoring of the wildlife behavior.
• GRBAlpha smallsat, University of Košice, has been developed to demonstrate the detector technology and electronics for the future “CubeSats Applied for MEasuring and LOcalizing Transients” (CAMELOT) mission, which is a planned constellation of nanosatellites providing all-sky coverage with high sensitivity and localization accuracy following detections of gamma-ray transients.
• Open Cosmos, the space company that provides end-to-end satellite missions, is the supplier of two of the missions to be launched on board. The company has been responsible for the design, manufacturing, integration and mission management of the custom-built nanosatellites for Lacuna Space and Sateliot.
• Challenge One smallsat is an “Internet of Things” satellite, includes an innovative communication technology developed in TELNET facilities by Tunisian expertise. This Tunisian Satellite Launch will be the basis for the creation of a new space ecosystem for Tunisia and its region.
• KSU CubeSat by the College of engineering (COE) at King Saud University is sending telemetry data and photos from the space to the ground station.
• LacunaSat2-B of Lacuna Space based in UK and NL provides global connectivity for Internet-of-Things devices.
• Sateliot is the satellite telecommunications operator that will launch a constellation of nanosatellites to democratize the Internet of Things with 5G coverage. The company plans to deploy 16 satellites from 2022 reaching 96 and an investment of over 100 million euros by 2025.
Retrospect of the Launch Service Provider ISILAUNCH with Launch Campaign ISILAUNCH27
• March 30, 2021: As part of this first commercial Soyuz launch of our launch partners, the GK Launch Services, ISILAUNCH had manifested a total of 14 satellites on this launch, accommodated in four ISISPACE QuadPack Deployers, which were commanded by our fully redundant iMDC (Modular Deployment Controller) sequencer. We are pleased to present who were part of this Joint Adventure! 21)
Overview of Payloads Serviced by ISILAUNCH and Launched Onboard the Soyuz-2 Vehicle from the Baikonur Cosmodrome
• The Asher Space Research Institute of the Technion – Israel Institute of Technology developed three 6U CubeSats, named ADELIS-SAMSON 1, 2 and 3, which were all accommodated on this launch. The ISISPACE QuadPack Deployer slots were customized to specific deployment velocities for each satellite to ensure an initial relative inter-satellite position after separation. The SAMSON satellites will perform experiments on the geo-location of ground-based radio sources.• The Canadian company Kepler Communications designed and built two 6U CubeSats – Kepler-6 and -7 – for multispectrum communication with both wideband high data-rate communication and narrowband low data-rate communications on board for it and IoT (Internet of Things) applications.
• The Federal University of Santa Maria (UFSM), located in Brazil, together with the Instituto Nacional the Pesquisas Espaciais (INPE), developed their second satellites in the NanosatC-BR series: the 2U CubeSat NanosatC-BR2. They continue the mission of doing Earth magnetic field observation and research on the South Atlantic Anomaly.
• The Korea Microgravity Science Laboratory (KMSL), a 3U CubeSat built by the College of Engineering from Chosun University in Gwangju, in South Korea, was launched under contract with the Korea Aerospace Research Institute (KARI) to perform microgravity experiments in orbit.
• The Astrodynamics and Control Laboratory of Yonsei University, located in Seoul, was in charge of designing a combined mission consisting of a 1U and 2U CubeSat, named Timon and Pumbaa, to jointly generate images of solar corona through a camera system, also launched under contract with KARI.
• A total of four 0,25U CubeSats were built by the Technische Universität Berlin, in Germany, to demonstrate a distributed satellite system with a new UHF communications system, an experimental GNSS receiver, and an optical positioning sensor and a laser reflector for precise orbit positioning.
• For our customer Hiber, also from The Netherlands, we placed their Hiber-3 satellite on this mission, a 3U CubeSat designed by Hiber as part of their second generation of satellites, for further testing towards providing connectivity for IoT (Internet of Things) sensors and devices running on quite limited power for low latency IoT services.
“As a service providing company, it is quite important to us to see so many returning customers on this mission, who entrusted us once again for the launch of their satellites. Glad we could support them to realize their ambitious and crucial missions”, stated Abe Bonnema, ISILAUNCH director and co-founder of ISISPACE. And he continued: “Similarly, we were pleased to be working once again with the already familiar team of our launch partners, GK Launch Services. At ISILAUNCH, we always strive to provide the highest standards of service to our customers, even in such times when everything involving arranging a launch, such as transport and logistics, is a bigger challenge than ever before. We cherish the moment of this success, meanwhile looking forward to the next launch already!”

Mission Status
• May 4, 2022: Astroscale Holdings Inc. (“Astroscale”), the market leader in satellite servicing and long-term orbital sustainability across all orbits, today announced that, despite several unexpected setbacks, its End-of-Life Services by Astroscale-demonstration (ELSA-d) mission successfully completed further controlled close-approach rendezvous operations between its two spacecraft in orbit. The technologies proven in this demonstration include tracking of an object from a great distance, rendezvous with an uncontrolled object, and handover from absolute navigation to relative navigation for a low-Earth orbit (LEO) servicing spacecraft. These capabilities are essential for rendezvous and proximity operations and on-orbit servicing, and this demonstration is unprecedented for a commercially funded mission in LEO. 22)
- “The journey to reunite the servicer and client, along with the successful completion of switching from absolute to relative navigation, have allowed us to prove even more key technologies and operational capabilities required for commercial end-of-life debris removal services,” said Seita Iizuka, ELSA-d Project Manager. “Proving these capabilities gives us, and our partners, greater confidence in our debris removal service developments, and I congratulate the team on this impressive achievement.”
- ELSA-d is the world’s first commercial mission to prove the core technologies necessary for on-orbit satellite servicing in LEO. The mission, which consists of two satellites — a servicer designed to safely remove debris from orbit and a client that serves as a piece of replica debris — was launched as a stack into a 550 km orbit from the Baikonur Cosmodrome in Kazakhstan in March 2021. The first demonstration, in which the servicer released the client and manually performed magnetic docking, was completed on August 25, 2021, successfully validating the capture system, on-board sensors and cameras.
- Mission operations for an Autonomous Capture demonstration began on January 25. After successful release of the client from the servicer’s magnetic capture system, the servicer successfully maintained a distance of 30 meters from the client through the use of autonomous relative station-keeping algorithms, with input from the servicer’s lower power radio (LPR) sensor. After successfully demonstrating this important rendezvous capability for more than seven hours, anomalous spacecraft conditions were detected. For the safety of the mission, the ELSA-d team decided not to proceed with the capture attempt. The servicer and client were further separated to allow the team to investigate several issues from a safe distance and by doing so, the spacecraft drifted farther apart, to a maximum distance of approximately 1,700 km.
- The biggest challenge of the latest demonstration was replanning the rendezvous approach with the use of only four of the eight thrusters on the servicer. This restricted the ability of the servicer to perform detailed rendezvous maneuvers with the client as originally planned. While a system issue had an impact on three of the thrusters, the root cause for the loss of one thruster is not clear and is under joint investigation by Astroscale and Bradford/ECAPS, the thruster supplier for the ELSA-d mission.
- Several carefully planned maneuvers were conducted over the past two months to prepare the servicer for a controlled close approach rendezvous with the client. On April 7, using the limited set of available thrusters, the servicer successfully maneuvered to a distance of 159 meters from the client, and the ability of the servicer to search for and detect the client was validated, enabling a transition from absolute navigation, which relies on GPS and ground-based observations, to relative navigation, using on-board sensors. This handover has been the most challenging operation of the ELSA-d mission so far and is widely recognized as one of the more difficult capabilities to prove for satellite servicing operations.
- With the completion of this critical operation, the servicer has once more been maneuvered away from the client and will remain at a stable distance for several months. During this time the team will analyze the next phase of the mission, including the potential for a safe and viable magnetic recapture of the client.
- Despite not yet being able to complete the autonomous capture demonstration, the ELSA-d mission has proven several key technologies required for capturing orbital debris, including:
a) autonomous guidance, navigation and control algorithms,
b) closed loop control with on-board navigation sensors,
c) autonomous thruster rendezvous maneuvering and attitude control,
d) navigation of a servicer spacecraft from 1,700 km to within 160 m of a client using absolute navigation techniques (GPS and ground-based observations),
e) transition from absolute navigation to relative navigation using on-board LPR sensor,
f) more than one year of servicer and client satellite in-orbit mission operations, and
g) magnetic capture mechanism using a docking plate.
- As a validation of these pioneering capabilities, ELSA-d has received numerous awards and accolades for breaking new ground for space sustainability and on-orbit servicing, including the Via Satellite 2021 Satellite Technology of the Year and the Minister of State for Space Policy Award, sponsored by the Cabinet Office, Government of Japan. The mission was also key to Astroscale being named to TIME’s List of the 100 Most Influential Companies and Fast Company’s Most Innovative Companies.
- “ELSA-d was never going to be easy, even under ideal circumstances, but our global team has overcome numerous challenges and had tremendous successes, which will accelerate the already rapid growth of the on-orbit servicing market,” said Nobu Okada, Founder and CEO of Astroscale. “We are grateful for the recognition our team has received from around the globe, and we thank the international space community for its support.”
- Astroscale’s end-of-life services present a proactive way for satellite operators to protect their assets, avoid collision with other satellites and safeguard the orbital environment. Astroscale will harness what it learns from ELSA-d’s technologies and capabilities to deliver the cutting-edge ELSA-M spacecraft, capable of capturing multiple defunct LEO satellites in a single mission. Technology development and planning are well underway to deliver an on-orbit demonstration, with the UK Space Agency, the European Space Agency and OneWeb as key partners, to test ELSA-M’s capabilities with more than one defunct satellite belonging to a constellation operator, such as OneWeb.
• April 7, 2022: Astroscale plans to resume an attempt to capture a satellite acting as a piece of debris in low Earth orbit despite losing half the servicer’s eight thrusters. 23)
- Most of the other issues that forced Astroscale to pause its End-of-Life Services by Astroscale-demonstration (ELSA-d) mission Jan. 26 have been mitigated or resolved, the Tokyo-based startup said in an April 6 news release.
- However, the company has been unable to fix ongoing technical issues affecting four “non-functional” 1-newton High Performance Green Propulsion (1N HPGP) thrusters.
- All eight thrusters were provided by Swedish propulsion specialist ECAPS, which is owned by U.S.-based Bradford Space.
- Bradford Space CEO Ian Fichtenbaum said his company is aware of the thruster issues and is providing support “to the best of our abilities.”
- Fichtenbaum said: “These issues do not relate to and are not a result of the design or build of the thrusters and we have full confidence in our products.”
- Astroscale said it aims to continue the ELSA-d mission after clearing the other undisclosed anomalies. However, the loss of thrusters has impacted the ability of its 175 kg servicer to capture the 17 kg client as planned.
- “With safety always paramount, our team has used a complex mix of burns with the remaining thrusters, aerodynamic drag, and the natural perturbations of Earth’s gravity to bring the servicer safely back to a distance where we can continue with operations,” the company said.
- Astroscale said it would move the servicer to within 160 meters of the client “in the near future,” where it will seek to validate a low-power radio sensor needed to detect and track the servicer to operate more autonomously.
- “Success in this demonstration would be an important advancement for rendezvous and proximity operations, especially under more challenging circumstances than planned,” it said.
- The company then plans to move the servicer to a safe distance while it decides whether to go ahead with a recapture mission.
- The servicer had earlier successfully captured the client in an Aug. 25 demonstration that involved more manual control by flight operators in the U.K.
• January 26, 2022: Astroscale said Jan. 26 it has paused an attempt to autonomously capture an in-orbit satellite for the first time after detecting “anomalous spacecraft conditions.” 24)
- The company’s 175-kilogram servicer spacecraft was preparing to make the attempt Jan. 25, after separating from a 17-kilogram client satellite acting as a piece of debris for a series of on-orbit demonstrations.
- While the servicer had successfully used its magnetic mechanism to release and recapture the client in an Aug. 25 test, this demonstration aimed to use autonomous capabilities for a larger-scale mission.
- However, Astroscale said the company detected an anomaly after the servicer began “autonomous relative navigation, maintaining a constant and safe distance from the client spacecraft over multiple orbits” as the company prepared for recapture.
- “For the safety of the mission we have decided not to proceed with the capture attempt until the anomalies are resolved,” Astroscale said.
- “Both spacecraft are operational and safely separated. We are in communication with agencies, regulators, space surveillance networks, and our orbital neighbors.”
- The company added it still plans to continue the End-of-Life Services by Astroscale-demonstration (ELSA-d) and “will provide an update as soon as possible.”
- In addition to being autonomous, this mission aimed to recapture the client spacecraft after releasing it to a much greater distance than the August test, while employing full-scale rendezvous and proximity operations for the first time.
- The servicer and client were separated by a few centimeters for Astroscale’s manual demonstration in August. Astroscale confirmed the client had separated tens of meters away from the servicer at the start of its autonomous test, but declined to disclose the current distance.
- The satellites have been in low Earth orbit since they were launched together on a Soyuz rocket March 22, 2021. Astroscale plans to initiate a controlled de-orbit phase after completing ELSA-d ’s main demonstration elements.
• August 26, 2021: Astroscale’s End-of-Life Services by Astroscale-demonstration (ELSA-d) successfully tested its ability to capture its client spacecraft using the servicer’s magnetic capture system, in a demonstration performed on Wednesday, August 25 (UTC). 25)
- A major challenge of debris removal, and on-orbit servicing in general, is docking with or capturing a client object; this test demonstration served as a successful validation of ELSA-d’s ability to dock with a client, such as a defunct satellite.
- When ELSA-d was launched and commissioned, a mechanical locking mechanism held its servicer and client spacecraft together. The first step of this demonstration was to unlock this mechanism. Once unlocked, the magnetic capture system alone held the client to the servicer, preparing ELSA-d to repeatedly capture and release the client in future demonstrations.
- The client was then separated from the servicer for the first time and captured to validate the magnetic capture system. During the release and capture period, Astroscale’s Mission Operations and Ground Segment teams checked out and calibrated the rendezvous sensors and verified relevant ground system infrastructure and operational procedures.
- The successful completion of this phase paves the way for the remainder of Astroscale’s pioneering demonstrations of space debris removal. The Engineering and Mission Control teams are now preparing for “capture without tumbling,” where the client will be separated to a greater distance, and the method of rendezvous and docking will rely on a combination of on-board autonomous software and advanced ground processing of telemetry and commands. This demonstration is expected to be completed in the coming months and will be followed by the “capture with tumbling” phase, in which the client will simulate an uncontrolled, tumbling space object. The final capture demonstration will be “diagnosis and client search,” in which the servicer will inspect the client, withdraw to simulate a far-range search, then approach and recapture the client.
- “This has been a fantastic first step in validating all the key technologies for rendezvous and proximity operations and capture in space,” said Nobu Okada, Founder & CEO of Astroscale. “We are proud to have proven our magnetic capture capabilities and excited to drive on-orbit servicing forward with ELSA-d.”
Ground Segment
• August 11, 2021: Ground station providers anticipate a new era of collaboration after coming together to support Astroscale, the startup months away from conducting the world’s first privately funded debris-removal demonstration. 26)
- A total 16 ground stations are necessary for delivering the connectivity Astroscale needs for its ELSA-d mission in low Earth orbit, comprising a servicer spacecraft and a smaller client satellite that will act as a piece of debris.
- A typical LEO mission typically only needs one or two ground stations.
- Astroscale’s two spacecraft were launched March 22 aboard a Soyuz-2 rocket, and are continuing to perform tests in preparation for a series of maneuvers this year that will demonstrate the startup’s capabilities.
- The Tokyo-based venture’s ground station in Japan is cooperating with other ground stations worldwide operated by U.S.-based Atlas Space Operations and Viasat, Norway-based KSAT and Sweden’s SSC.
- This level of integration calls for software virtualization tools that the industry has only recently adopted, executives from these ground station companies said Aug. 10 during the Small Satellite Conference.
- “The change from where we were five years ago to today is pretty dramatic,” John Williams, vice president of Viasat’s Real-Time Earth unit, told a conference side meeting.
- “And that software, in our case automation and virtualization of almost everything at the antenna level, made it very easy for us to work with Astroscale and with other folks.
- “That would have been much more difficult when many components were still on hardware and had to be programmed .... just a few years ago.”
- It means Astroscale can use a single interface for receiving information from all of its ground station partners about its spacecraft, Astroscale senior ground systems engineer Alexandra Gravereaux said, and also for sending commands to direct them in space.
- “The other thing to note is all of us are collectively bringing higher efficiency levels,” added Dan Adams, head of U.S. sales at KSAT.
- “Higher access levels, higher reliability to meet those critical mission operations that enable missions like on-orbit robotics, where in the past ... there may be [a] question as to whether or not you would be able to contact your spacecraft at any time.”
- Against the backdrop of COVID-19, panelists remarked on how they had yet to meet Astroscale’s Gravereaux in-person despite the project’s highly technical demands.
- Brian Priar, SSC’s project manager for the ELSA-d mission, said preparing and conducting the mission entirely remotely would have been an “almost impossible thing to do just five years ago.”
Future Collaboration
- “The integration of our four different ground networks to support one mission is certainly an example of where we’re likely to see the LEO space economy moving,” said KSAT’s Adams.
- “And in fact the broader space economy as we start to encounter more and more activity [and] the need for really more robust, resilient, continuous communications on multiple platforms across multiple users.”
- He predicted “almost a commoditization” of the ground segment, where providers are all cross-compatible.
- That has always been the goal at Atlas, said its chief technology officer Brad Bode, which described its business as more of a software company than a ground station operator.
- Atlas owns and operates 13 antenna systems.
- “We will continue to integrate those, we will continue to integrate AWS antennas, which is in the process, we will likely integrate Microsoft and hopefully maybe some of you guys as well — if you’ll let us,” Bode told the panel.
- “But either way ... you can tell that [the industry] is moving toward that commoditization and, in order to get there, the hardware vendors also need to get onboard for not having proprietary ... signals, proprietary headers, things like that.”
- Viasat’s Williams said he expects some of the market will move toward more open platforms, adding “I’m not sure all of the market will move that way. There are some customers that will probably always have specialized needs that we will all have to adjust to.”
• June 29,2021: Astroscale is joining forces with four satellite ground station providers to deliver the level of connectivity it needs for the world’s first commercial debris removal demonstration this year. 27)
- The Tokyo-based startup plans to use 16 ground stations in total to support its End of Life Services by Astroscale-demonstration (ELSA-d) mission, which comprises a 175-kilogram servicer spacecraft and a 17-kilogram client satellite that will act as a piece of debris.
- After both spacecraft were launched March 22 to low Earth orbit (LEO), further testing to prepare for the debris removal demonstrations has pushed out plans to start maneuvers by two months to the end of July.

- “ELSA-d will be a milestone moment in space engineering as we demonstrate the world’s first commercial debris removal mission; ground segment is one of these critical capabilities that is instrumental to our mission success,” said Astroscale chief engineer Gene Fujii.
- Each spacecraft requires a dedicated mission control system, operated by Astroscale from the In-Orbit Servicing Control Centre (IOCC) at Harwell Campus, U.K.
- For the servicer to perform complex maneuvers that include capturing the client with a magnetic docking plate — in both tumbling and non-tumbling scenarios — the control system via ground stations must be in constant contact with the spacecraft for up to 20-30 minutes.
- That is up to three or four times longer than control centers typically need to connect with LEO satellites for health and status monitoring, according to Astroscale.
- Using more ground stations in more parts of the world helps deliver these extended periods of contact.
- Joining Astroscale’s ground station in Totsuka, Japan, are sites from U.S.-based Atlas Space Operations and Viasat, Kongsberg Satellite Services (KSAT) of Norway and Sweden’s Swedish Space Corporation (SSC).
- The 16 ground stations are spread across 12 countries in total, compared with one or two ground stations used in a typical LEO mission.
- “A typical mission uses ground stations in the poles to maximize download contact times,” said Alberto Fernandez, head of ground systems engineering for Astroscale’s U.K. subsidiary.
- “We had to carefully select the ground stations and providers to maximize the duration of the constant contacts. Stations were selected following the ground track of the spacecraft in addition to the poles.”
- SSC is preparing antenna stations in Western Australia, Sweden, Canada, Thailand and two in Chile.
- “It is crucial that the overlapping partner stations deliver seamlessly,” SSC project manager Brian Priar said.
- “Just like the mission itself, the ground segment solution is truly breaking new territory for modern space missions.”
- Viasat said it is drawing on ground stations across North and South America, Europe, Africa and Australia to meet the mission’s high-revisit requirements from the poles to mid-latitude stations, while Atlas is readying services from two sites in the United States.
- KSAT is providing the polar ground stations in the Arctic and Antarctica, in addition to other sites in its interoperable global network, with the intention that this scalable model will lead to new approaches for ground segment operations in the future.
- Astroscale said the large ground station alliance is also vital for supporting camera technology that ELSA-d will use for the mission, facilitating real-time, on-ground data processing tasks.
- However, the alliance has also posed challenges for the startup, which has had to conduct frequency coordination discussions in each of the countries where it will use ground stations.
- It said ELSA-d’s technology, policy and sustainability goals helped push the venture through these negotiations, building a foundation for future collaborations with governments and legislative institutions.
-“Astroscale’s network of ground station providers will be critical to our commercial on-orbit servicing services for the future,” said John Auburn, Astroscale group chief commercial officer and managing director of its U.K. business.
• ELSA-d utilizes the National In-orbit Servicing Ground Segment Facility hosted at the Satellite Applications Catapult (UK) and developed by AS (prime) with Catapult, RHEA, GMV, and SciSys subcontracts. The facility has been developed as a multi-mission facility with a long-term view to provide capability for a variety of IOS missions.
Architecture
The control center has, at its core, a Mission Control System for the chaser spacecraft and one for the target spacecraft. The center interfaces to a number of external entities including Astroscale’s own ground station in Totsuka (Japan), external ground stations for contact with the chaser and target, and a ground support center in Tokyo. It is built in the virtualized environment of a CEMS cloud infrastructure. Satellite communications are based on CCSDS standards and a core suite of ESA software tools are part of the system. The main components are as follows:
1) MCS (Mission Control System): The MCS is responsible for controlling and monitoring the spacecraft. It is based on ESA MICONYS SCOS-2000 framework. The Mission Database (MIB) is considered a sub-component of the MCS. The MCS relies on the File Based Operations (FBO) approach which guarantees improved reliability on command sequences, bandwidth optimization, file compression, and use of standard file formats.
2) FDS (Flight Dynamics System): The FDS determines both the position and the orientation of satellites, and enables the planning and execution of required maneuvers. It is responsible for LEOP calibrations, planning docking and orbit maintenance, conjunction avoidance maneuvers with other resident space objects, de-orbiting and re-entry planning, and station-keeping operations. Classical functionalities, such as orbit and attitude determination, use advanced filtering techniques to fuse multiple measurements sources and absolute/relative navigation features. In addition, the FDS provides IOS specific functionalities such as diagnosis trajectory optimization, active abort maneuver reconstruction, safety orbit planning and capture trajectory optimization. A 2D/3D visualization tool is built-in to the FDS.
3) IPS (Image Processing System): The IPS is in charge of the estimation of the docking plate attitude information from a live stream of images taken by the chaser spacecraft. It includes advanced feature detection capabilities that allow the chaser to estimate the docking plate attitude information even when it is not directly visible.
4) MPS (Mission Planning System): The MPS is used to plan activities and use of resources (e.g. data budget). The MPS receives data from the FDS, the MIB, and the Mission Operations Preparation Tool (MOIS Preparation) to construct a coherent schedule, which can then be uplinked to the satellite, executed and verified by telemetry. The MPS is able to automatically negotiate passes with the ground stations providers based on the user needs. In addition to classical MPS functionalities, it automatically manages passes over ground stations in order to have (when possible) an uninterrupted stream of telemetry when switching from one ground station to the other.
5) Automation System (MOIS): The automation system is responsible for the automatic execution of schedules produced by the MPS and preparation system. It also provides validation and test harness components which can be used for testing before going operational, and a validator component which can be used alongside the MCS to validate that correct procedures are being executed.
6) GSCG (Ground Station Control System): The GSCG is based on the ESA SCOS2000 NIS component. It is used to interface the MCS and ground stations conforming to the CCSDS SLE standard.
7) SIM (Simulator): The simulator is implemented using the ESA SIMULUS Simulation framework. It provides an end-to-end simulation of both the chaser and target spacecraft. The simulator includes a highly realistic chaser model that emulates the OBCs. This feature not only allows AS to run faster than realtime simulations but also to run on-board software in a plug-and-play fashion. The purpose of the simulator is testing and validation of operational procedures and databases, support the training of operators, and execution of simulation campaigns. Moreover, the simulator is used for testing and validating the on-board software in an operational environment.
Operations
The mission will be split into four main phases with respect to operations: LEOP, Commissioning, Critical Phases and non-Critical Phases. Docking and rendezvous will be performed during Critical Phases, and the mission will be continuously operated. Astroscale will be fully responsible for conducting all the operations for the chaser and target at the control center in Harwell.
The control room has several operator desks; each desk includes a thin client for remotely connecting to the data center. As all the MCC systems are running in a virtualized environment inside of the data center, the positions and roles of the desks are flexible. The data center will be replicated in two different locations in order to ensure the reliability of the MCC. In addition, every system will be composed of a primary and backup server, where data is replicated in near real-time across servers and data center locations. The control center and associated communication channels are designed with data encryption in mind.
In summary, the ELSA-d mission is an important step towards fully operational EOL (End of Life) and ADR (Active Debris Removal) missions by maturing technologies and capabilities necessary for future services. In particular, the ELSA-d mission will not just space-prove future payload technologies but will also go through almost the full series of CONOPS expected in a full servicing mission with a demonstration target.
Next Steps: ELSA-d is Astroscale’s first IOD mission that is part of a roadmap of other IODs and capability developments for future EOL and ADR services. Presently, Astroscale is working with future customers and is in the early stages of developing a supply chain capable of enabling high volume production of chasers.
References
1) http://astroscale.com/about
2) ”SSTL and ASTROSCALE team up for Orbital Debris Removal missions,” SSTL Press Release, 21 November 2017, URL: https://www.sstl.co.uk/media-hub/latest-news/2017/sstl-and-astroscale-team-up-for-orbital-debris-rem
3) ” ELSA-d,” Astroscale, 2018, URL: https://astroscale.com/missions/elsa-d/
4) Jeff Foust, ”Astroscale to partner with SSTL on orbital debris removal mission,” Space News, 21 November 2018, URL. https://spacenews.com/astroscale-to-partner-with-sstl-on-orbital-debris-removal-mission/
5) Chris Blackerby, Akira Okamoto, Seita Iizuka, Yusuke Kobayashi, Kohei Fujimoto,Yuki Seto, Sho Fujita, Takashi Iwai,Nobu Okada, Jason Forshaw, Andy Bradford, ”The ELSA-d End-of-life Debris Removal Mission: Preparing for Launch,” Proceedings of the 70th IAC (International Astronautical Congress), Washington DC, USA, 21-25 October 2019, paper: IAC-19.A6.5.2, URL: https://iafastro.directory/iac/proceedings/IAC-19/IAC-19/A6/5/manuscripts/IAC-19,A6,5,2,x49982.pdf
6) S. Eckersley, C. Saunders, D. Gooding, M. Sweeting, C. Whiting, M. Ferris, J. Friend, L. Forward, G. Aglietti, A. Nanjangud, P. Blacker, C. Underwood, C. Bridges, P. Bianco, ”In-Orbit Assembly of Large Spacecraft Using Small Spacecraft and Innovative Technologies,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B4.6A.1, p. 10
7) Chris Blackerby, Akira Okamoto, Kohei Fujimoto, Nobu Okada, Jason L. Forshaw, John Auburn, ”ELSA-d: An in-orbit End-of-Life Demonstration Mission,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A6.5, URL: http://astroscale.com/wp-content/uploads/2018/09/ELSA-1-Conference-IAC-2018-v1.1.pdf
8) Chris Blackerby, Nobu Okada, Akira Okamoto, Eriko Yamamoto, Charity Weeden, Jason Forshaw, John Auburn, Karen Rogers, ”Perspectives from a Venture Space Company on Regulatory Frameworks for Addressing Space Debris,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A6.8.6
9) ”Astroscale’s ELSA-d Mission Ready for Launch from Baikonur Cosmodrome on Saturday, March 20,” Astroscale Press Release, 17 March 2021, URL: https://astroscale.com/astroscales-elsa-d-mission-ready-for-launch-from-baikonur-cosmodrome-on-saturday-march-20/
10) ”ELSA-d Mission Licence Approved by UK Space Agency,” Astroscale Press Release, 12 March 2021, URL: https://astroscale.com/elsa-d-mission-licence-approved-by-uk-space-agency/
11) ”Astroscale’s ELSA-d Spacecraft Arrives at the Baikonur Cosmodrome Ready for March Launch,” Astroscale Press Release, 20 January 2021, URL: https://astroscale.com/elsa-d-spacecraft-arrives-for-march-launch/
12) ”Astroscale Ships ELSA-d Spacecraft to Launch Site,” Astroscale Press Release, 22 December 2020, URL: https://astroscale.com/astroscale-ships-elsa-d/
13) ”Astroscale Announces March 2021 Launch Date for World’s First Commercial Active Debris Removal Demonstration Mission,” Astroscale, 18 November 2020, URL: https://astroscale.com/astroscale-announces-march-2021-launch-date-for-worlds-first-commercial-active-debris-removal-demonstration-mission/
14) ”SSTL Ships Target Satellite to Tokyo for Astroscale's ELSA-d Mission,” SSTL Press Release, 7 November 2019, URL: https://www.sstl.co.uk/media-hub/latest-news/2019/sstl-ships-target-satellite-to-tokyo-for-astroscal
15) ”Astroscale Takes Next Step Toward Launch of World’s First Commercial Active Debris Removal Mission,” Astroscale Press Release, 10 October 2019, URL: https://astroscale.com/astroscale-takes-next-step-toward-launch-of-worlds-first-commercial-active-debris-removal-mission/
16) ”Astroscale Advances Environmentally Sustainable Use of Space through ESA / OneWeb Sunrise Project,” Astroscale, 9 July 2019, URL: https://astroscale.com/astroscale-advances-environmentally-sustainable-use-of-space-through-esa-oneweb-sunrise-project/
17) ”Astroscale enters technical cooperation with European Space Agency,” Astroscale Press Release, 12 December 2018, URL: https://astroscale.com/astroscale-enters-technical-cooperation-with-european-space-agency/
18) Stephen Clark, ”Privately-funded mission takes off to begin space debris cleanup trials,” Spaceflight Now, 22 March 2021, URL: https://spaceflightnow.com/2021/03/22/privately-funded-mission-takes-off-to-begin-space-debris-cleanup-trials/
19) ”World’s first space debris removal satellite ELSA-d successfully launched – Critical ground connectivity by SSC,” SSCSpace, 22 March 2021, URL: https://sscspace.com/blog/2021/03/22/worlds-first-space-debris-removal-satellite-launched/
20) ”From Baikonur, 38 SmallSats Preparing For Push To Orbit By GK Launch Services,” Satnews, 16 March 2021, URL: https://news.satnews.com/2021/03/16/from-baikonur-38-smallsats-prepped-for-push-to-orbit-by-gk-launch-services/
21) ”Looking back at the ISILAUNCH27 launch campaign onboard Soyuz-2 rocket,” ISILAUNCH, 30 March 2021, URL: https://www.isilaunch.com/looking-back-at-the-isilaunch27-launch-campaign-onboard-soyuz-2-rocket/?mc_cid=465902cc2a&mc_eid=0bbb5fdcf1
22) ”Astroscale’s ELSA-d Mission Successfully Completes Complex Rendezvous Operation,” Astroscale, ELSA-d Press Releases & Updates, 4 May 2022, URL: https://astroscale.com/astroscales-elsa-d-mission-successfully-completes-complex-rendezvous-operation/
23) Jason Rainbow, ”Astroscale to restart debris-removal demo with half the thrusters,” SpaceNews, 7 April 2022, URL: https://spacenews.com/astroscale-to-restart-debris-removal-demo-with-half-the-thrusters/
24) Jason Rainbow, ”Astroscale pauses debris-removal demo following anomaly,” SpaceNews, 26 January 2022, URL: https://spacenews.com/astroscale-pauses-debris-removal-demo-following-anomaly/
25) ”Astroscale’s ELSA-d Successfully Demonstrates Repeated Magnetic Capture,” Astroscale News, 26 August 2021, URL: https://astroscale.com/astroscales-elsa-d-successfully-demonstrates-repeated-magnetic-capture/
26) Jason Rainbow, ”Ground station collaboration paving way for pioneering space missions,” SpaceNews, 11 August 2021, URL: https://spacenews.com/ground-station-collaboration-paving-way-for-pioneering-space-missions/
27) Jason Rainbow, ”Astroscale breaking new ground for on-orbit servicing demonstration,” SpaceNews, 29 June 2021, URL: https://spacenews.com/astroscale-breaking-new-ground-for-on-orbit-servicing-demonstration/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft CONOPS (Concept of Operations) Launch Mission Status Ground Segment References Back to Top