EarthCARE (Earth Clouds, Aerosols and Radiation Explorer)
EO
ESA
JAXA
Cloud profile and rain radars
EarthCARE is a satellite operated by JAXA and ESA. It will develop climate and weather forecasting models by understanding the role of cloud-aerosol-radiation interactions.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, JAXA |
| Mission status | Approved |
| Measurement domain | Atmosphere |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Aerosols, Radiation budget |
| Measurement detailed | Cloud top height, Precipitation Profile (liquid or solid), Cloud cover, Cloud optical depth, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Cloud ice content (at cloud top), Cloud ice (column/profile), Cloud imagery, Cloud base height, Aerosol Extinction / Backscatter (column/profile), Cloud liquid water (column/profile), Upward short-wave irradiance at TOA, Upward long-wave irradiance at TOA, Cloud drop effective radius, Aerosol effective radius (column/profile) |
| Instruments | CPR (EarthCARE), MSI (EarthCARE), BBR (EarthCARE), ATLID |
| Instrument type | Cloud profile and rain radars, Lidars, Imaging multi-spectral radiometers (vis/IR), Earth radiation budget radiometers |
| CEOS EO Handbook | See EarthCARE (Earth Clouds, Aerosols and Radiation Explorer) summary |
Related Resources
Summary
Mission Capabilities
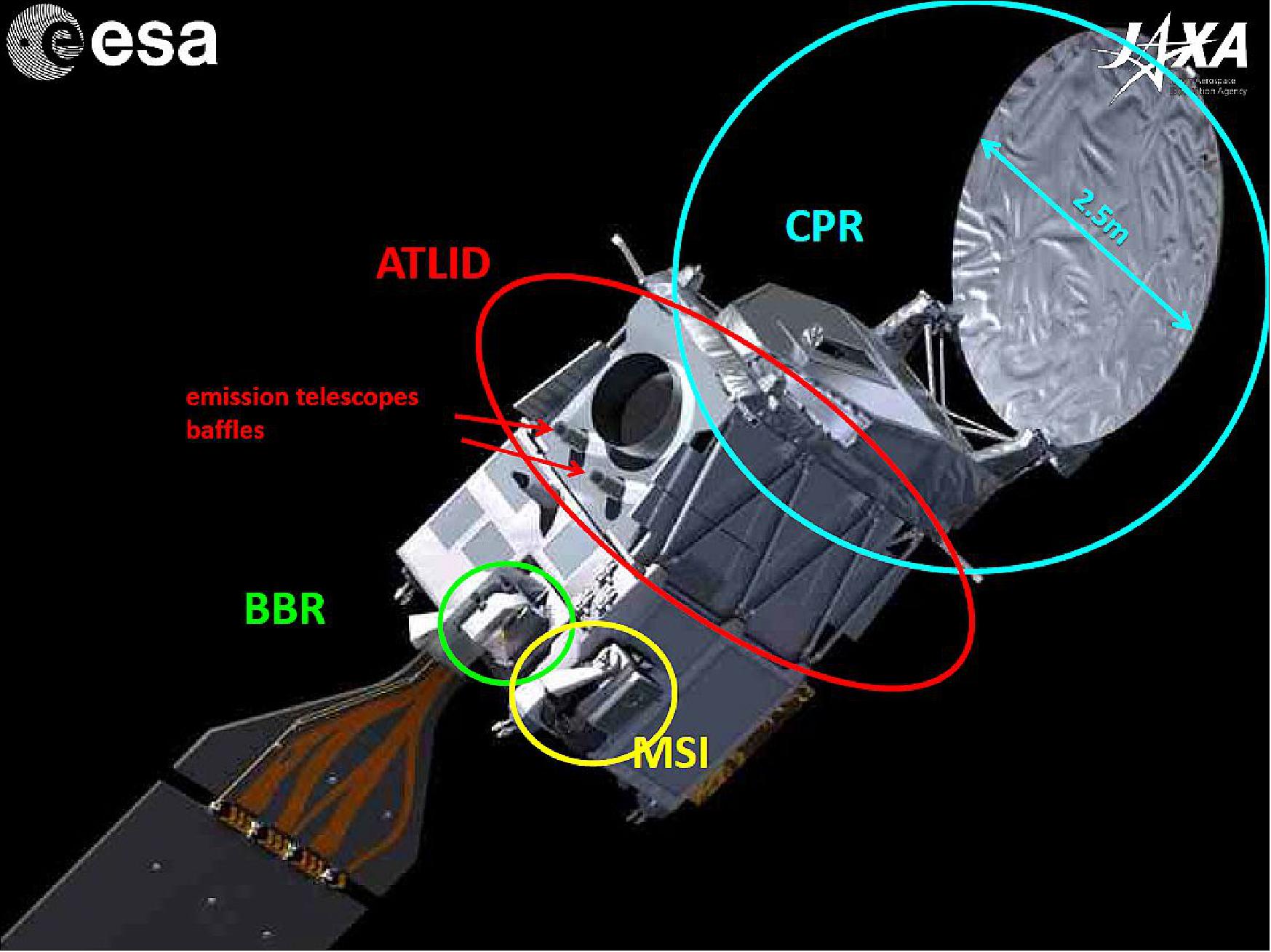
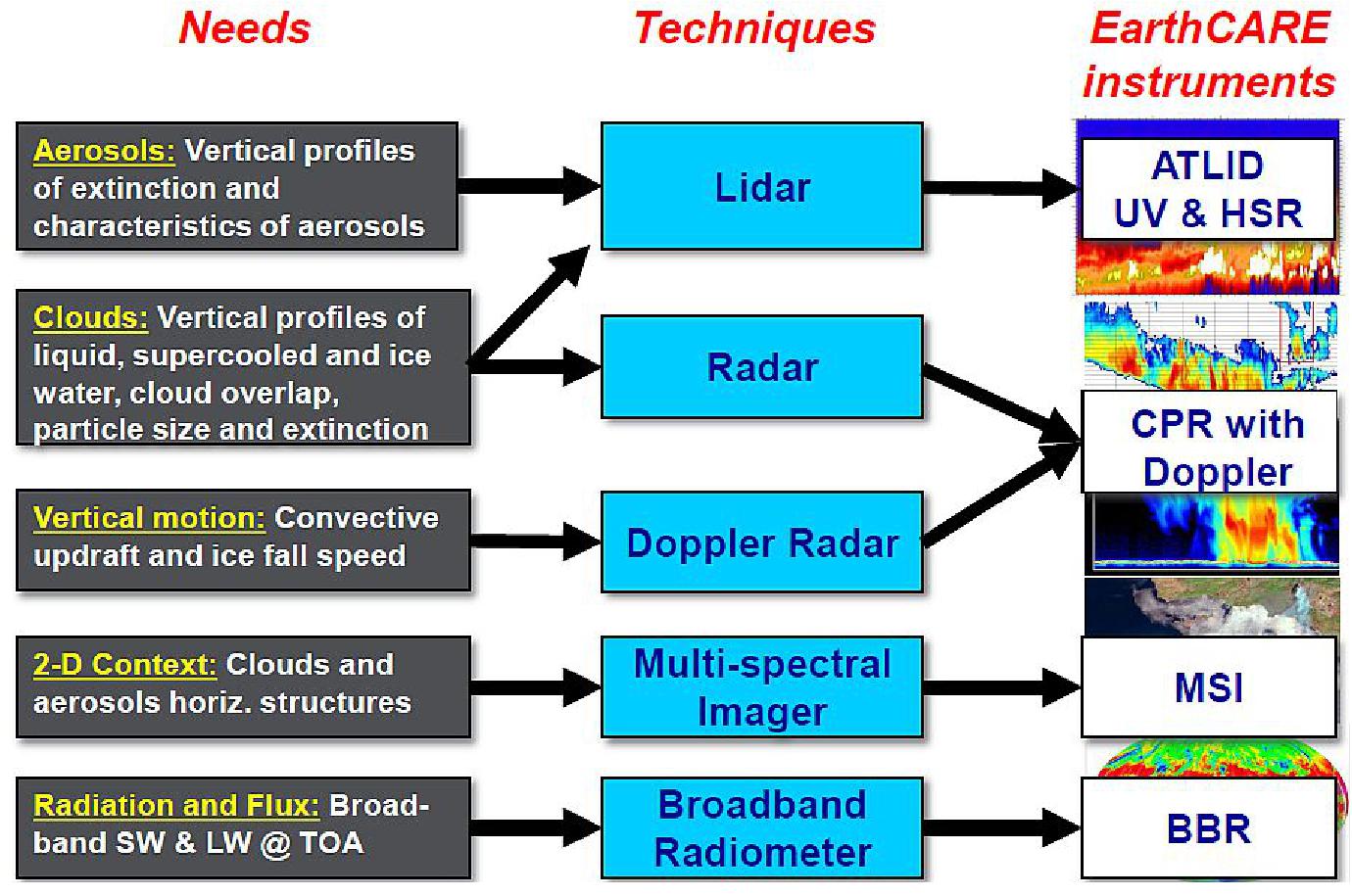
EarthCARE will carry four instruments onboard. The Atmospheric Lidar (ATLID) will provide vertical profiles of aerosols and thin clouds, whilst the Cloud Profiling Radar (CPR) will provide vertical profiles of thicker clouds. The Multi-Spectral Imager (MSI) acting as a multi-purpose imaging radiometer will provide visible light and infrared radiation measurements of the clouds and aerosols, whilst the Broad-Band Radiometer (BBR) will provide radiation measurements from the top of the atmosphere.
Performance Specifications
ATLID will emit linear polarised ultraviolet (UV) light at a wavelength of 355 nm. The backscatter from clouds and aerosols is distinguishable from other particles in the atmosphere. CPR operates at a frequency of 94.05 GHz with a Pulse Repetition Frequency (PRF) of 6100 - 7500 Hz. It has a vertical spatial resolution of 500 m and a horizontal resolution of 750 m. MSI observes over seven bands (one visible, one near-infrared (NIR), two short-wave infrared (SWIR), and three thermal infrared (TIR)) over a swath width of 150 km with a resolution of 500 m. BBR measures solar and thermal radiation using three telescopes, one nadir-pointing and the others ±55° (forwards- and backwards-facing).
EarthCARE will undertake a sun-synchronous orbit with an altitude of 393.14 km and an inclination of 97.05°. The orbit will have a period of 92.5 minutes and a repeat cycle of 25 days.
Space and Hardware Components
Implementing the AstroBus-L built by Airbus Defence and Space (DS) formerly known as Astrium, EarthCARE weighs a total of 2000 kg.
Radio communications for Telemetry, Tracking, and Command (TT&C) will be performed via S-band frequencies with a downlink data rate of 128 kbit/s and an uplink rate of 64 kbit/s. Payload data will be transferred at a rate of up to 150 Mbit/s via X-band frequencies.
EarthCARE (Earth Clouds, Aerosols and Radiation Explorer)
The EarthCARE mission is a joint European/Japanese (ESA/JAXA/NICT) mission within ESA's Earth Explorer Core missions of its Living Planet Program, building on the objectives of ESA's ERM (Earth Radiation Mission) and JAXA's ATMOS-B1 satellite projects (i.e., evolution and merger of the previous candidate missions ERM and ATMOS-B1).
Note: Since 2004, NICT is a merger of CRL (Communication Research Laboratory) and the Telecommunications Advancement Organization of Tokyo, Japan. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14) 15) 16)
In this arrangement, ESA is providing the spacecraft bus (ERM platform), three instruments, and the launch of the spacecraft, while JAXA (Japan Aerospace Exploration Agency) and NICT (National Institute of Information and Communications Technology) of Tokyo are providing one instrument (CPR). The ground segment is provided by ESA and JAXA.
In Nov. 2004, EarthCARE was selected for implementation (as the 3rd Earth Explorer Core Mission) within ESA's Living Planet Program (or as the 6th Earth Explorer Mission). As of mid-2007, the EarthCARE project entered Phase B planned to last 15 months.
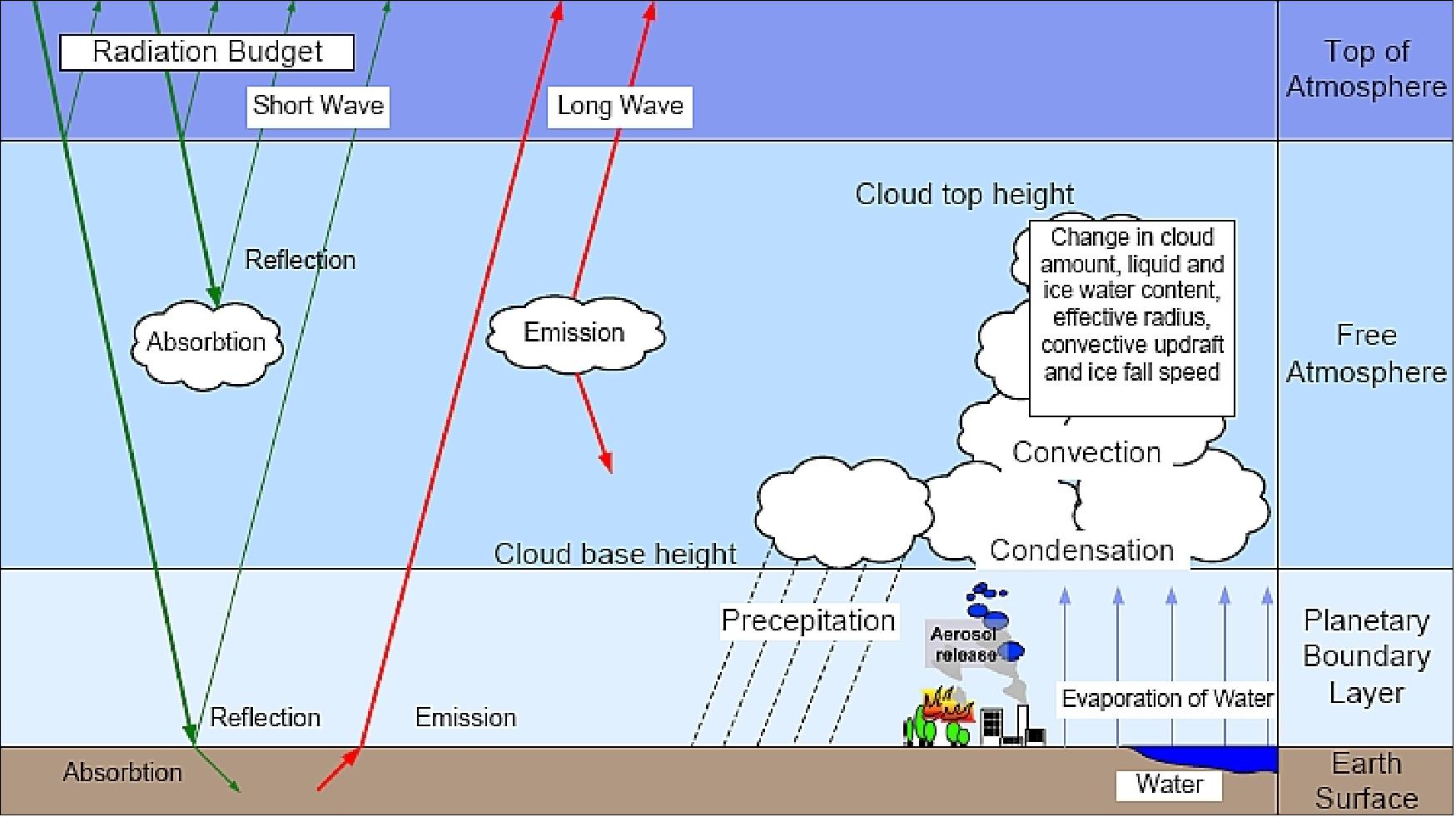
The EarthCARE science objectives are devoted to the study of natural and anthropogenic climate change.
This involves the observation of clouds, aerosols and radiation parameters (determination of the global distribution of vertical profiles of cloud and aerosol field characteristics) to provide basic, essential input data for numerical modelling and global studies of:
1) The observation of the vertical profiles of natural and anthropogenic aerosols on a global scale, their radiative properties and interactions with clouds
2) The observation of the vertical distributions of atmospheric liquid water and ice on a global scale, their transport by clouds and their radiative impact
3) The retrieval of profiles of atmospheric radiative heating and cooling through the combination of the retrieved aerosol and cloud properties.
The key parameters determining the radiative properties of clouds and aerosols are:
• The aerosol-cloud-radiation interaction - i.e., the extinction and absorption properties of aerosols
• The large-scale vertical cloud-field overlap and cloud-precipitation interactions.
• The vertical distribution of water and ice and their transport by clouds.
So far, there are no global datasets, providing, simultaneously, the vertical profiles of clouds and aerosol characteristics together with vertical temperature and humidity profiles and the TOA (Top-of-Atmosphere) radiance. Such datasets are crucial to validate the model parameterizations of cloud processes regarding both water and energy fluxes. The vertical profiles are important in controlling the radiative transfer processes in the atmosphere, and so affect the heating profiles, which then influence the dynamics.
The required observations for quantitative data analysis are:
1) Cloud studies
• Geometry (top, base, multiple layers, fractional cover/overlap)
• Vertical profiles of ice/liquid water content and ice particle size
• Super-cooled cloud layers
• Small scale (1 km) fluctuations in cloud properties
• Light precipitation
• Vertical motions
2) Aerosol studies
• Height and optical depth of aerosol layers, aerosol size and type
3) Radiation studies
• Short-wave (SW) and long-wave (LW) radiances at TOA
• Spectrally resolved top of the atmosphere LW radiances
• Water vapour and temperature profiles
The weather and climate studies must ensure that the radiative budget of the cloud is closed, and the specifications of the instruments have to be derived from a target radiative flux error at the TOA (Top-of-Atmosphere). The target accuracy required by the WCRP (World Climate Research Program) for monthly mean TOA radiative fluxes at the climate model grid scale (of order 250 km) is ± 10 Wm-2. This target accuracy has been adopted for instantaneous TOA radiative fluxes derived from the different EarthCARE measurements on a 50 km spatial scale corresponding to modern Global Circulation Models (GCMs).
Spacecraft
On May 27, 2008, ESA awarded a contract to Airbus DS (former EADS Astrium GmbH of Friedrichshafen), Germany to design, develop and integrate the EarthCARE spacecraft (mission prime). The spacecraft configuration is constrained by the accommodation of the instruments, which all require an unobstructed Earth view. In some cases, deep space and occasional sun views are also necessary for instrument calibration. 17) 18) 19)
EarthCARE uses the AstroBus-L of Airbus DS UK, a standard modular ECSS (European Cooperation for Space Standards) compatible satellite platform compatible with an in-orbit lifetime of up to 10 years, with consumables sizeable according to the mission needs. The platform design is one-failure tolerant and the standard equipment selection is based on minimum Class 2 EEE parts, with compatibility to Class 1 in most cases. The AstroBus-L platform is designed for direct injection into LEO (Low Earth Orbit). Depending on the selection of standard design options, AstroBus-L can operate in a variety of LEOs at different heights and with different inclinations. An essential feature of AstroBus-L is the robust standard FDIR (Failure Detection, Isolation and Recovery) concept, which is hierarchically structured and can easily be adapted to specific mission needs. 20)
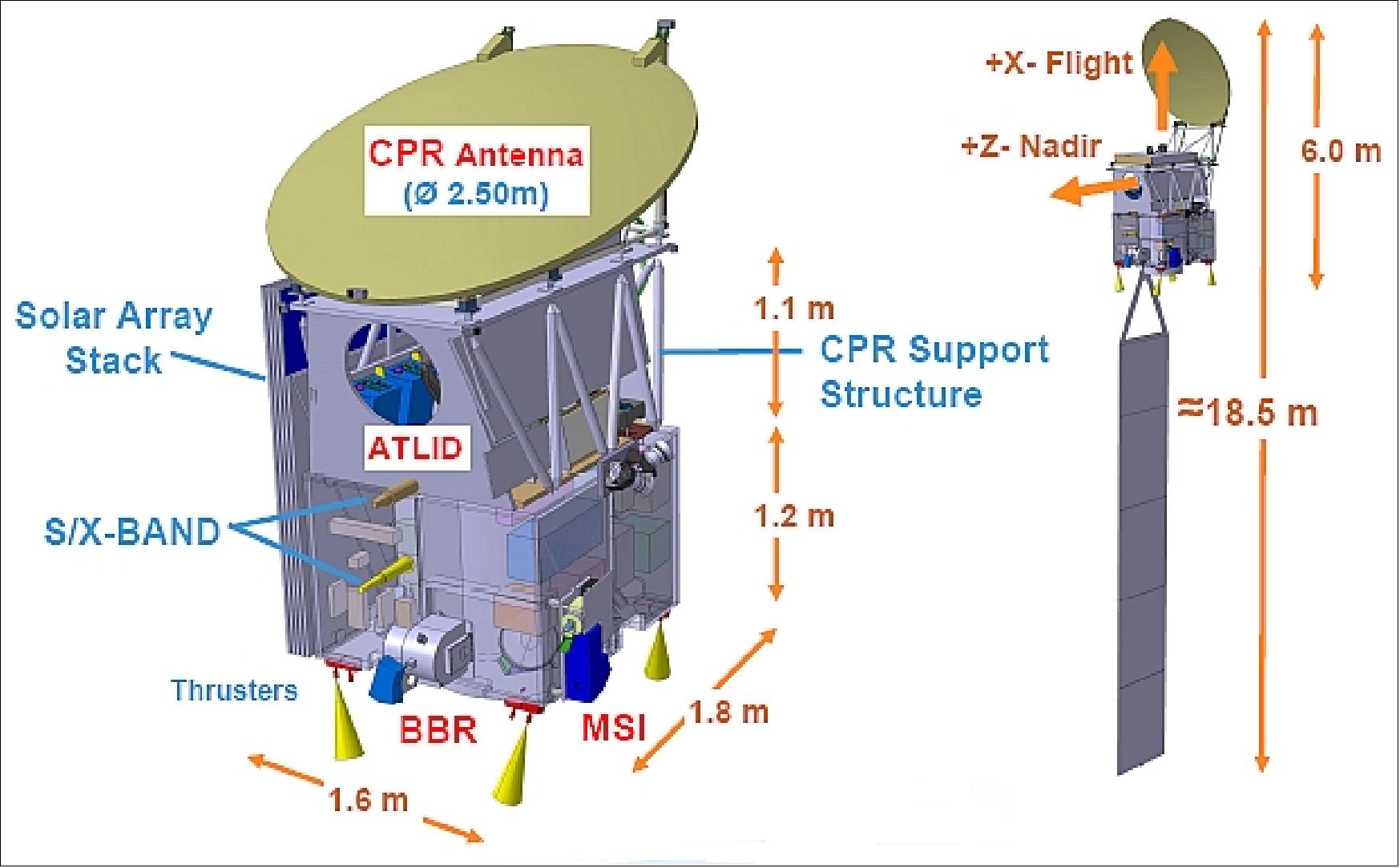
A stacked configuration has been selected as a result of trade-offs covering mass, instrument accommodation and also assembly/integration considerations. Structural deformations resulting from manufacturing tolerances and in-orbit environments are minimized, as the load paths between the instruments are rather short. This will result in the co-registration requirements being met without resorting to complex design and manufacturing techniques. The active instruments are accommodated on top of the service module, and the passive ones on the nadir panels of the lidar and the service module.
The service module interfaces with the launch vehicle in the anti-flight direction. It carries the deployable solar array wing(s) and the communication antennas. The star trackers are mounted on the zenith panel. The lidar is mounted on its top panel and also supports the radar. In this way, a short and stiff load path results, minimizing inter-instrument alignment errors. The imager is accommodated on the anti-sun or nadir side and the broadband radiometer on the nadir side. This concept respects all field-of-view requirements and also provides sufficient radiator area for thermal control.

Parameter | Mass (kg) | Power (W) | Data rate (kbit/s) |
ATLID | 230 | 320 | 820 |
CPR | 240 | 300 | 240 |
MSI | 30 | 55 | 515 |
BBR | 25 | 35 | 20 |
Satellite platform | 585 | 320 | - |
Propellant | 313 | - | - |
Total (margin inclusive) | 1859 | 1130 | 1500 |
EPS (Electrical Power Subsystem): EPS is based on an unregulated 28 V bus concept, with the battery directly connected to the main bus bar. The nominal S/C power demand is around 1700 W in science mode, with only low variation over the orbit. The bus voltage varies in the range between 20 V and 34 V. In nominal operational conditions (science mode), the bus voltage does not drop below 25 V at the load interfaces. Nevertheless, in power contingency situations, the voltage might reduce to 20 V. 21)
To avoid uncontrolled S/C attitudes after an accidental power outage, a high priority has been given to the design of a robust DNEL (Disconnect of Non-Essential Loads) concept. In case of critically low bus voltages, the DNEL function switches off all PCDU power outlets which are not essential for the survival of the S/C. A two-stage DNEL system with software controlled and a hardwired DNEL function is implemented on the EarthCARE satellite.
PCDU (Power Control and Distribution Unit): The PCDU is the core element of the EarthCARE EPS and provides the following key functions and performance parameters:
• MPPT (Maximum Power Point Tracking) with 4500 W output power to the main bus
• Battery interface with a current capability of 100 A (actively limited)
• Redundant Main Error Amplifier with majority voting (2/3 redundancy)
• 80 LCLs (Latching Current Limiters) in total, with current capabilities between 1A and 16 A
• 6 FCLs (Foldback Current Limiters) with current capabilities of 1 A or 2 A for the essential avionics
• 144 outlets for heater lines, each with 1 A power capability (protected in groups)
• 32 outlets for activation of pyro-technical release initiators or thermal knifes
• Redundant MIL-1553 bus interface, discrete interfaces and hot redundant auxiliary supplies.
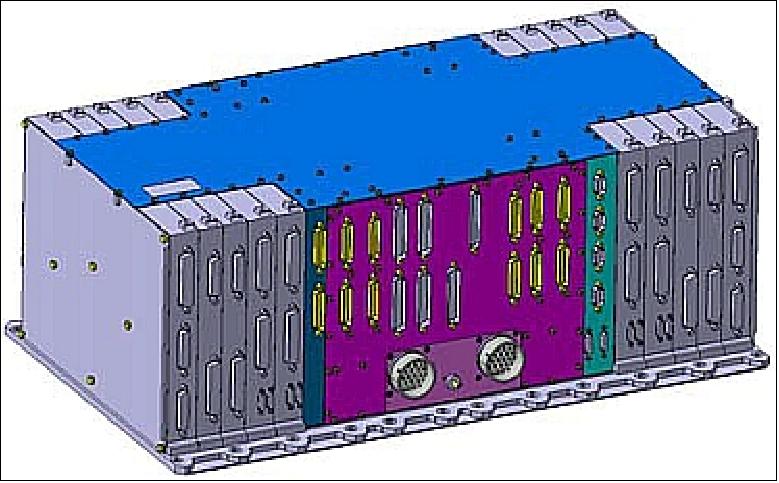
The EarthCARE PCDU is built by Astrium GmbH (Germany) with distribution modules provided by CRISA (Spain). The PCDU, with dimensions of 616 mm x 350 mm x 233 mm (L x W x H), has a mass of ~ 37 kg. It contains the following modules (in Figure 4 from centre outwards, symmetrically):
• 1 battery interface module (incl. bus filter, battery relays, current sensors, main error amplifier, DNEL logic, high-power LCLs
• 5 MPPT modules (each with 2/3 converter redundancy)
• 1 Data Handling Module (incl. MIL-1553 I/F, Auxiliary Supplies)
• 4 LCL Modules (each with 16 LCLs)
• 4 Heater Power Modules (each with 32 heater line outlets, protected by six LCLs)
• 2 Release Initiator Modules (each with 16 outlets, configurable between a thermal knife or pyrotechnical initiator characteristic and LCLs).
The EarthCARE MPPT modules are based on the Swarm and TerraSAR-X MPPT design. Five independent modules, each equipped with its own triple redundant trackers are used in the EarthCARE PCDU. This solution was preferred against a solution with one central redundant MPPT controlling all converters, because of its higher reliability and better tracking accuracy in case of temperature differences along the SA (Solar Array) wing. Each module comprises three super-buck converters with a power output capability of up to 450 W.
A deployable SA is used in the trailed configuration. It is rotated by a SADM (Solar Array Drive Mechanism) for optimized sun illumination over the orbit. The SA is based on GaAs triple junction solar cells and provides an output power of nearly 6000 W (BOL). Assembled from five identical panels, the SA provides an overall area of 21.5 m2. The yoke has a length of 1.9 m, this is necessary to avoid shadows caused by the S/C body on the cells.
The battery assembly is provided by ABSL Space Products (Abingdon, UK) and comprises three battery modules. The battery modules are based on Sony 18650HC Li-Ion cells and are a rebuild of the Sentinel-2 battery modules.
The characteristics of the battery assembly are:
• 3 modules, each of 8s72p configuration
• Total capacity BOL: 324 Ah; BOL energy: 9.4 kWh
• Voltage range: 20 V to 33.6 V
• Total mass: 96 kg (32 kg per module)
• Specific energy: 97.5 Wh/kg.
EPS battery accommodation: Due to the battery module size and the tight S/C interior, the battery modules are accommodated on the outside of the satellite on the zenith panel (-Z direction). The batteries are thermally decoupled from the S/C structure by thermal washers and are isolated by MLI. They are cooled by a radiator on the top of each module. For thermal control, heater mats are integrated into each battery deck. They are controlled by the satellite thermal control system.
AOCS (Attitude and Orbit Control Subsystem): The propulsion subsystem is a monopropellant system. The thrusters are all approximately pointed out of the rear of the spacecraft (with respect to the flight direction).
RF communications: Two data links are provided for the transmission of command and control and for payload data. Housekeeping and command data are transmitted via an S-band transponder, whereas an X-bank downlink with a rate up to 150 Mbit/s is required for the payload data.
• S-band uplink data rate of 64 kbit/s
• S-band downlink data rate of 128 kbit/s/2 Mbit/s (with/without ranging).
Mission Status
• July 27, 2022: ESA’s biggest and most complex Earth Explorer mission yet is currently being tested for space at ESA’s ESTEC Test Centre, the largest satellite test facility in Europe. 22)

- EarthCARE is equipped with two main instruments, a lidar plus radar – along with a smaller radiometer and cloud imager – which are powered in turn by this mammoth 11-m-long solar wing.
- EarthCARE will fill a missing dimension in current climate change modelling: the role of clouds and aerosols in reflecting incoming solar radiation back out to space and trapping infrared radiation as it is emitted from Earth’s surface. Is the net effect heating or cooling of Earth’s atmosphere?
- Developed as a joint venture between ESA and the Japan Aerospace Exploration Agency (JAXA), the front of the van-sized EarthCARE satellite hosts its quartet of instruments with its solar wing deployed from its rear.
- The satellite is set to undergo seven months of testing at the 3000 m2 ESTEC Test Centre to check every aspect of its readiness for space, starting with a recent deployment test of its solar wing from the stowed configuration.
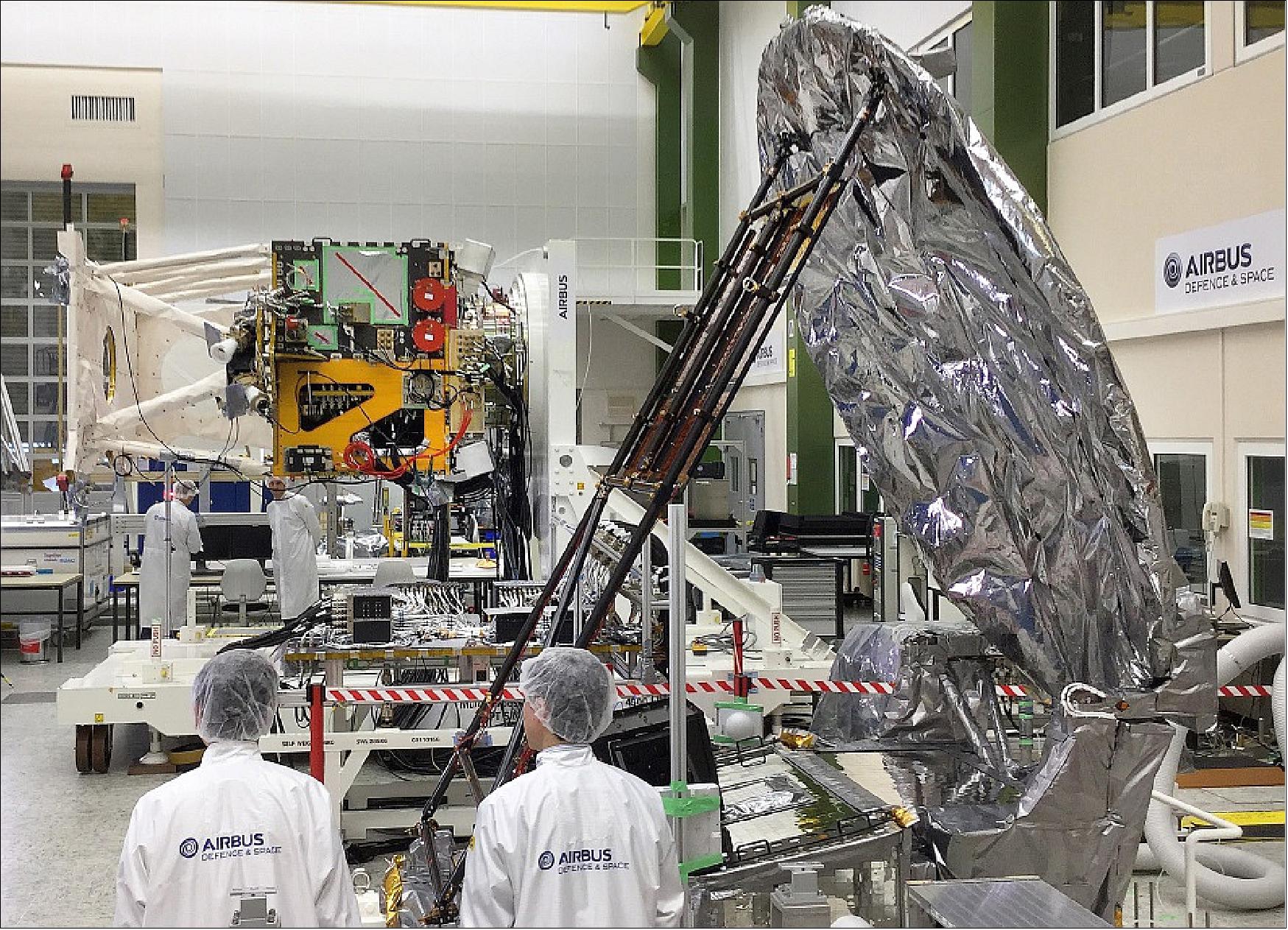
• July 21, 2022: ESA’s upcoming EarthCARE satellite mission has just taken a big stretch. Engineers have gently unfolded this new satellite’s huge five-panel solar wing to test that it will deploy correctly once it is in space. The solar wing is a critical part of the satellite, providing the energy for EarthCARE to do its job: to quantify the role that clouds and aerosols play in heating and cooling Earth’s atmosphere. 23)
- EarthCARE is one of ESA’s Earth Explorer missions. Since the launch of the first Earth Explorer in 2009, this family of world-class research missions has continued to demonstrate how breakthrough satellite technology and novel observing techniques can deliver an astounding range of scientific findings about our planet.
- Our world, and the life it sustains, is under increasing pressure, particularly as a consequence of climate change. The need to better understand how our planet functions as a system is more urgent than ever before.
- This need isn’t solely for academic interest, but to ensure that we are equipped with key information for decision-making to benefit of society.

- ESA’s EarthCARE satellite mission is expected to answer some critical scientific questions related to the role that clouds and aerosols play in reflecting incident solar radiation back out to space and trapping infrared radiation emitted from Earth’s surface. As engineers are preparing EarthCARE for its life in orbit, the satellite is being put through its paces at ESA testing facilities in the Netherlands – the largest satellite test facility in Europe, equipped to simulate every aspect of the space environment.
- One of the first tests involved the deployment of the satellite’s 11 metre solar wing from its folded stowed configuration, which allows it to fit in the rocket fairing, to its fully deployed configuration as it will be in orbit around Earth. The photograph shows the wing fully deployed.
Figure 11: Spreading EarthCARE’s solar wing. This timelapse video shows this deployment test from various angles (video credit: ESA–M. Cowan)
- For EarthCARE to deliver the measurements that are needed to make this important step forward in atmospheric science, it carries a suite of instruments, namely an atmospheric lidar, a Doppler cloud radar, a multispectral imager and a broad-band radiometer. The lidar, radar and imager together will provide unprecedented measurements of clouds and aerosols and the radiometer will measure the radiation.
- As engineers are preparing EarthCARE for its life in orbit, the satellite is spending the next seven months at ESA’s ESTEC Test Centre in the Netherlands – the largest satellite test facility in Europe. This 3000 m2 environmentally-controlled complex hosts test equipment to simulate every aspect of the space environment, from the vacuum and temperature extremes of Earth orbit to the violent noise and vibration of a rocket launch.

- One of the first tests involved the deployment of the solar wing from its folded stowed configuration, which allows it to fit inside the rocket fairing, to its fully deployed configuration as it will be in orbit around Earth.
- ESA’s Mehrdad Rezazad said, “We have a long list of tests that we have to put EarthCARE through in preparation for launch and flight. The team from Airbus, who is the prime contractor for EarthCARE, and the ESA and JAXA consortium teams have been working very hard to keep to schedule.
- “We are extremely happy to say that the solar wing deployment test went very well. The timely and complete deployment of the large solar wing soon after launch is crucial to the mission.
- “Since we have to deal with gravity on the ground, the separate panels were supported by wires for the test. In orbit the ties, holding the five panels together during the launch configuration, will be automatically sliced open by set of thermal knives, releasing the folded wing so that it can deploy fully behind the satellite platform.”
- With the first solar array deployment test now ticked off the ‘to do’ list, the various vibration and thermal-vacuum tests are to follow. These tests will simulate the environment of liftoff and space.
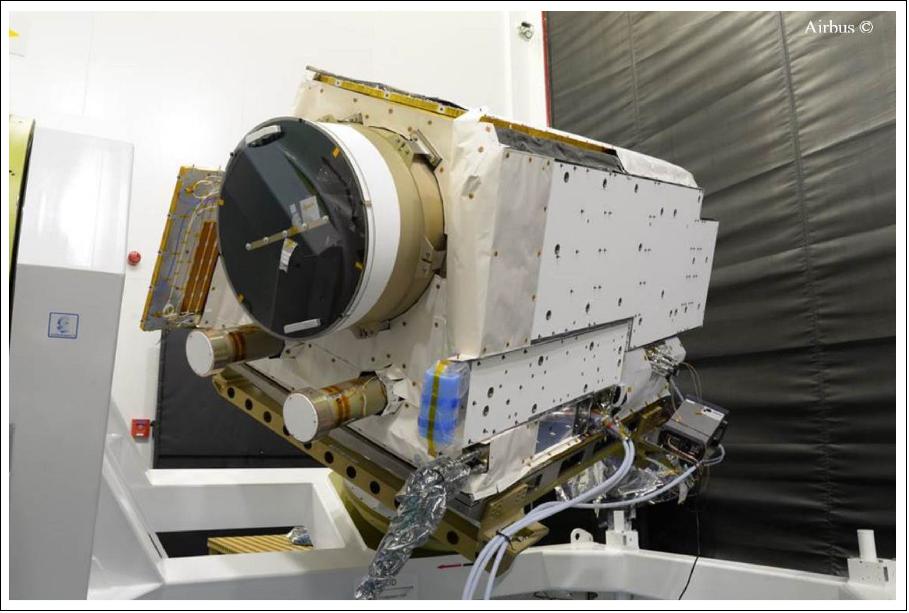
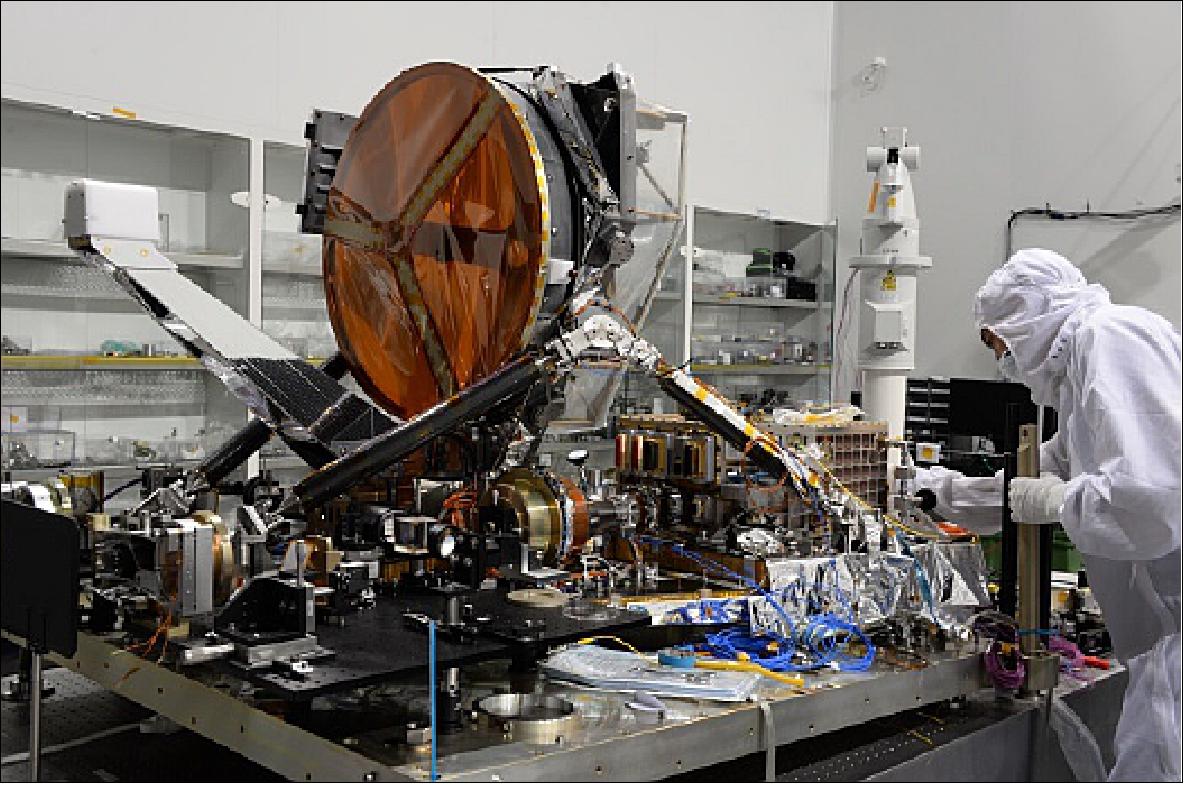
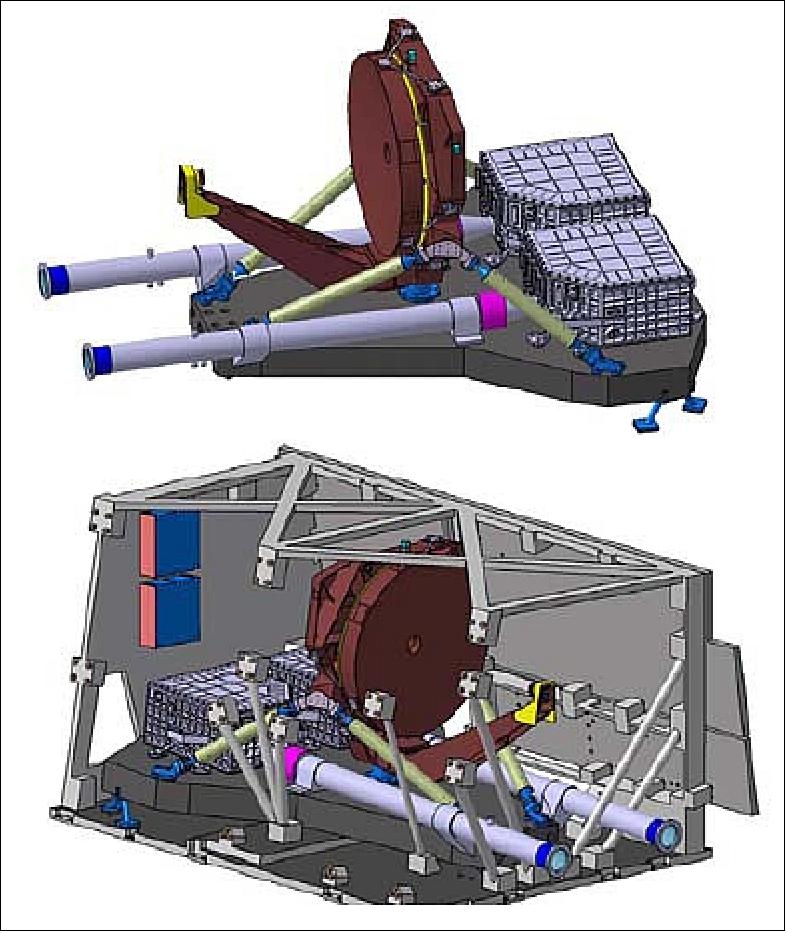
• January 6, 2021: Airbus Defence and Space in Toulouse was responsible for the design, assembly and test of ATLID. The instrument was designed as a self-standing instrument, as seen in Figure 13, thereby reducing the mechanical coupling between instrument/platform interfaces and allowing better flexibility in the satellite integration sequence. 24)
• June 17, 2020: With the successful integration of the ATLID-Instrument the EarthCARE satellite (Clouds Aerosols and Radiation Explorer) has passed a crucial milestone, as it concludes the "onboarding" of the three European instruments. 25)
- EarthCARE is a joint mission of ESA) and JAXA, with Airbus Defence and Space in Friedrichshafen (Germany) acting as the prime contractor to develop and build the satellite, and Airbus Defence and Space in Toulouse (France) supplying the Atmospheric Lidar ATLID.
- The integration sequence was successfully carried out in close cooperation between the Toulouse and Friedrichshafen teams - even under the protective but challenging COVID-19 crisis regulations. ATLID will now undergo a set of functional and performance tests which will then finally conclude the instrument delivery. The next step is the integration of the Japanese Cloud Profiling Radar (CPR).
- Once operating in orbit, EarthCARE will advance the understanding of the role that clouds and aerosols play in global climate modelling. For this EarthCARE will draw up vertical profiles of natural and man-made aerosols, register the distribution of water and ice and their transport by clouds, and provide essential input to climate models for more precise forecasting of global warming.
- Clouds and, to a lesser extent, aerosols reflect incident solar light back out to space, but they also trap outgoing infrared light. This leads to a net effect of either cooling or heating of the planet. In addition, aerosols influence the life cycle of clouds, and so contribute indirectly to their radiative effect – measuring them will give a better understanding of Earth's energy budget.

• July 2018: The satellite development is based upon a Protoflight Model (PFM) approach for the mechanical and thermal aspects and the project is currently in its Phase D. — An Electrical Functional Model (EFM) of the spacecraft, composed of engineering models (EM) of the main avionics units, platform equipment EM or simulators, representative harness and instrument control units, is used as a test bed to validate internal and external interfaces & protocols, to exercise the on-board software and operations, and to develop the test sequences and scripts in advance to the PFM verification program. 26)
- The integration of the EarthCARE Base-Platform (BPF) subsystems, encompassing structure, thermal, Reaction Control, Avionics and Electrical subsystems has been completed and the Prime team has initiated the formal test campaign of its major subsystems.
The four EarthCARE instruments are now approaching their final development stages and are all expected to be delivered for integration into the satellite platform in 2018
• ATLID (Atmospheric Lidar): The instrument model philosophy is based upon a Protoflight approach. A number of subsystems such as laser transmitter, beam expander, beam steering Mechanism, detector front-end have also been subject to specific efforts in terms of early breadboards, electrical models or qualification models to minimize the risks. Following the successful ATLID instrument CDR, completed in 2015, all the PFM subsystems have now been delivered to the ATLID responsible. The instrument integration is ongoing and the instrument qualification campaign is planned for the summer of 2018, followed by the instrument delivery to the satellite prime in the fourth quarter of 2018.
• CPR (Cloud Profiling Radar): The CPR instrument has been pre-delivered to the satellite Prime for integration onto the platform in the first quarter of 2017. After completion of all initial integration verifications, the instrument has been returned to JAXA for some refurbishment activities, before its final delivery planned for the fourth quarter of 2018.
• MSI (Multi-Spectral Imager): The Proto-Flight Model units, VNS and TIR cameras, Front End Electronics and Instrument Control Unit, integration have been completed. The VNS camera and instrument control units underwent a complete qualification test campaign before being delivered to the instrument prime SSTL. The TIR camera and Front end electronics qualification developed by SSTL will complete their testing at the instrument level. The full instrument integration has been completed and the environmental test campaign including the characterization test campaign is ongoing. The PFM MSI instrument will be delivered to the satellite prime for integration onto the platform and satellite-level testing third quarter of 2018.
• BBR (Broadband Radiometer): Assembly of the flight model Optics Unit and its environmental test campaign, comprising vibration and Thermal Vacuum tests were successfully completed. Detailed calibration and characterization campaign, including radiometric, spatial, straylight and polarization performance, has been initiated. The Instrument Control Unit testing was completed and was then coupled to the Optical Unit. The BBR is planned for delivery to the satellite prime in the first quarter of 2018.
- ATLID development status: All the PFM sub-units have now completed their qualification test campaigns and have been delivered to Airbus DS in Toulouse. The ATLID instrument PFM integration is proceeding nominally with most of the delivered units already integrated and assembled onto the instrument (Ref. 26).
- The overall instrument detection chain with its 3 channels has been integrated and characterized. The complete optical receiving chain, consisting of the receiving telescope with the spatial and spectral filtering optics, the Coalignment Sensor and the fibre couplers have been integrated and aligned on the instrument's stable structure. This assembly (Figure 15) was then submitted to a vibration tests campaign and optical characterization.
- ATLID is provided with two full transmitter chains, consisting of a Transmitter Electronics, a Power Laser Head and a Reference Laser Head, implemented in cold redundancy. Two major milestones were reached with the successful completion of the two units' qualification and acceptance test campaigns and their final delivery to Airbus DS, Toulouse. Successful switch-on and performance verification of the first transmitter unit has been performed at the Airbus DS Toulouse site.
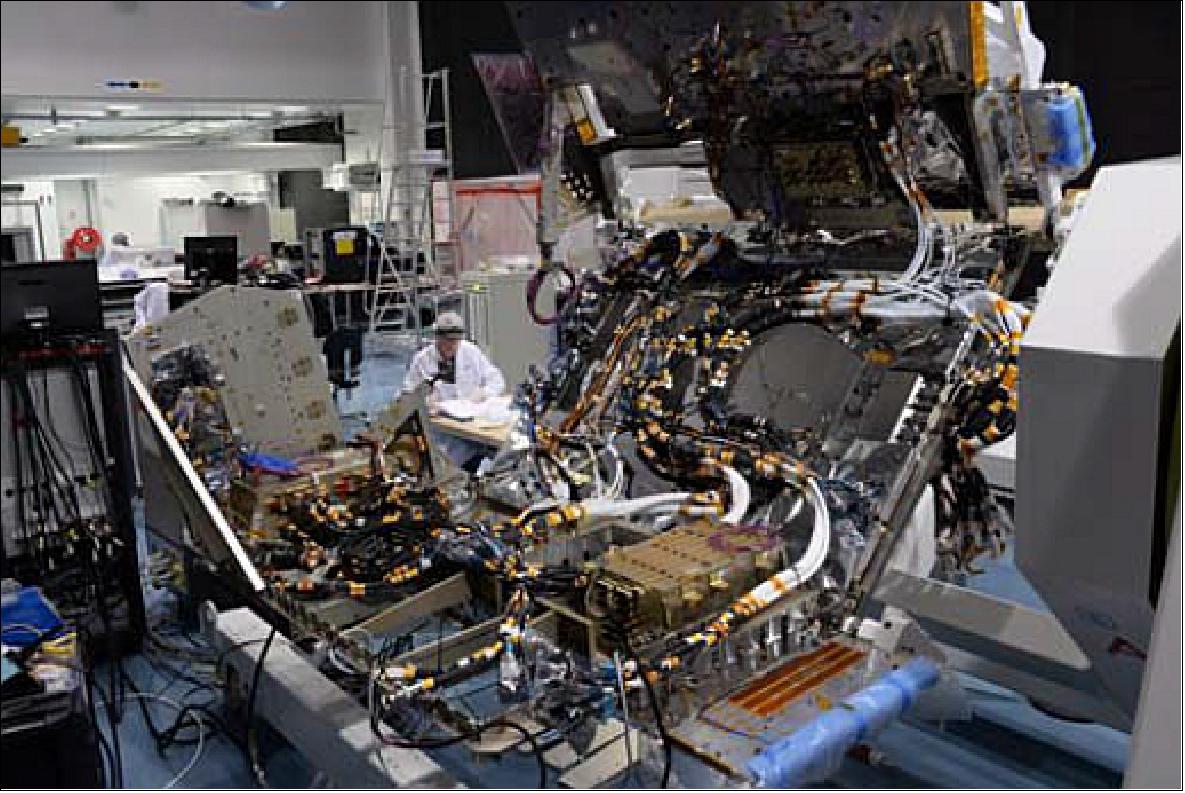
- The mechanical integration of the main structure, the housing structure (Figure 16) has been completed along with the assembly of the instrument flight harness. The instrument electrical integration has been completed with the coupling of the detection chain electronics, and laser electronics together with the ATLID Instrument Control Unit. These units have been integrated into the highly stable assembly and are now to be coupled with the second transmitter unit to allow the execution of the full instrument functional and electrical test program, to be completed by early 2018.
- The fully integrated instrument will follow a full qualification test campaign, with vibration, thermal vacuum, EMC, functional and performance including detailed calibration and characterization testing. The instrument delivery to the EarthCARE industrial Prime for System level AIT is planned for the fourth quarter of 2018 (Ref. 26).
• In April 2017, JAXA handed over the CPR (Cloud Profiling Radar) instrument to Airbus DS in Friedrichshafen, the prime contractor of ESA's EarthCARE project. In the coming weeks, JAXA and ESA teams will run final checks on the instrument before giving a "green light" to the Airbus project team to integrate it with the spacecraft. Once assembled on EarthCARE, it will be tested intensively for several weeks. Then the instrument will be handed back to JAXA for further adjustments before its final integration next year. 27)
• April 4, 2017: With ESA’s EarthCARE (Earth Cloud Aerosol and Radiation Explorer) satellite now entering its ‘production and qualification’ phase, ESA is calling for a new Mission Advisory Group. 28)
• October 2016: The EarthCARE system CDR concluded pending a close-out report. The ATLID (Atmospheric Lidar) PFM transmitter qualification campaign was completed. The second transmitter FM test campaign is ongoing.
• In Feb. 2016, the production of all ATLID PFM units and subsystems is well advanced at Airbus Defence & Space (France) and at their sub-contractor's premises. A major project milestone was achieved with the continuous operation of the ATLID PFM laser transmitter with stable ultraviolet performance during the first part of its qualification campaign. 29)
- The satellite EFM PFM activity progressed with the integration of the ATLID instrument control unit and electrical integration of the EQM Mass Memory and Formatting Unit, delivered recently by SYDERAL (CH), and is now proceeding.
- The Test Readiness Review of the MSI (Multi-Spectral Imager) Thermal Infrared Camera is ongoing at SSTL (UK). In parallel, the MSI Visible, Near Infrared and Short Wave infrared PFM camera is undergoing a refurbishment to overcome a spectral response anomaly discovered during its calibration campaign.
- In Japan, the CPR (Cloud Profiling Radar) operational and test procedures development is taking place. In parallel, JAXA and their prime contractor NEC are running refined tests of the RF sub-system in advance of the PFM final integration.
Launch
Orbit: Sun-synchronous near circular frozen orbit, mean altitude of 393.14 km, inclination = 97.05º, period = 92 minutes, LTDN (Local equator crossing Time on Descending Node) of 14:00 hours, the repeat cycle is 25 days.
The requirement calls for the maintenance of the ground track of ±25 km from the reference orbit in routine operations. The orbit altitude is selected to be as low as possible to optimize the performance of the active instruments, compatible with the limitations on the propellant supply for orbit maintenance. The low orbit altitude combined with the desired mission lifetime of two years (plus the commissioning phase) requires a dedicated strategy for orbit maintenance. The drag environment around Earth has a high level of variation due to unpredictable solar activity and at 400 km altitude, the level of drag is severe. This means that the required frequency of maneuvers could be anywhere from once per day up to once per month, depending on the conditions, deadband and operational constraints. 31)
Repeat cycle | 25 days |
Orbit period (nodal) | 5552.7 seconds (92.5 minutes) |
Semi-major axis | 6771.3 km |
Eccentricity | 0.001283 |
Inclination | 97.050º |
MLST (Mean Local Solar Time) on descending node | 14:00 ±5 minutes |
Argument of perigee | 90.0º |
Mean semi-major axis altitude | 393.1 km |
Minimum geodetic altitude | 398.4 km |
Maximum geodetic altitude | 426.9 km |
Mean geodetic altitude | 408.3 km |
Sensor Complement
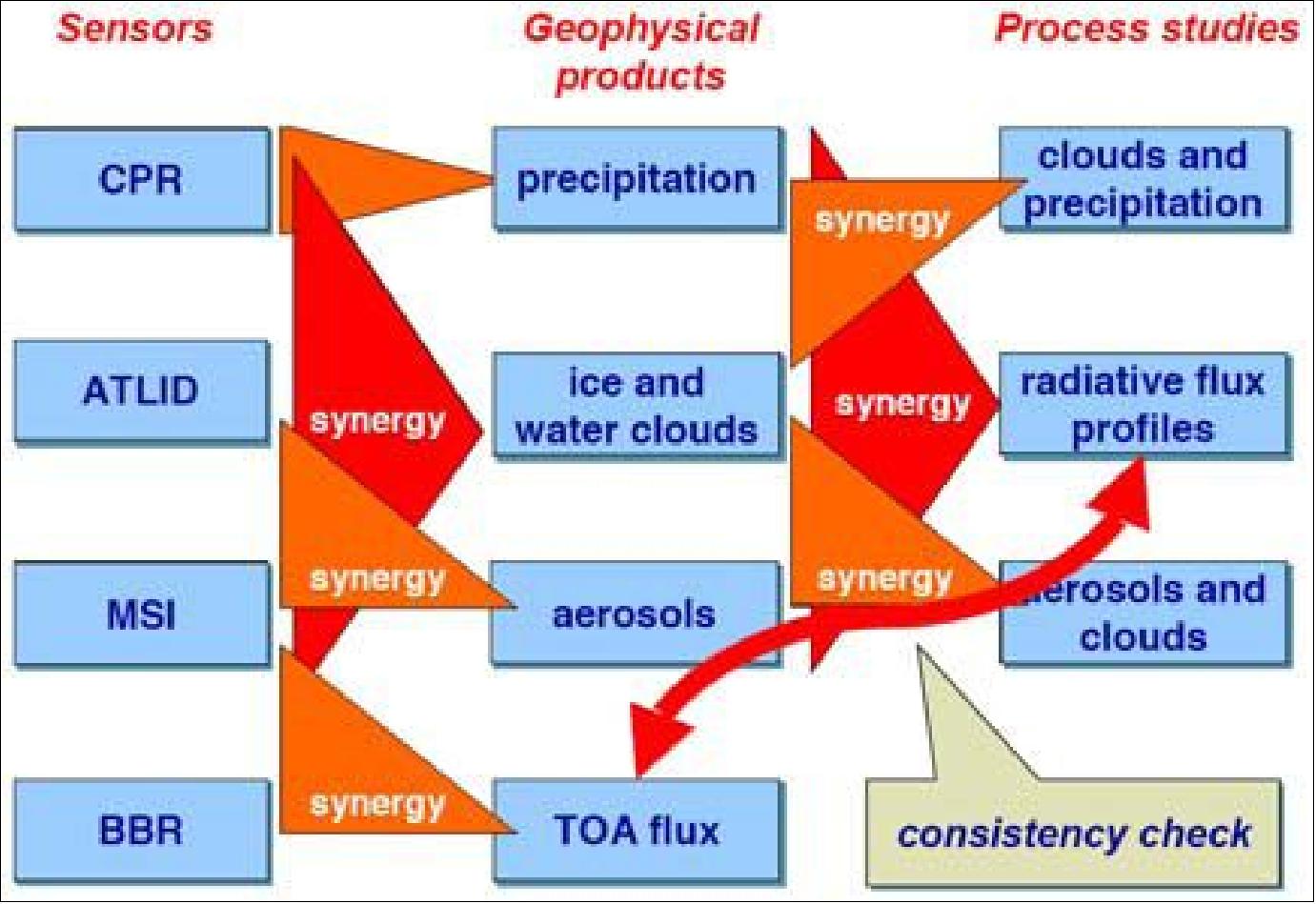
The combined active/passive instrument suite has the ability to provide synergy for cloud retrievals by inferring cloud vertical and horizontal structure at resolutions far above those of only-passive and only-active systems. The instruments have been optimized to provide co-located samples of the state of the atmosphere in the along-track direction. The centers of the instrument footprints will be located as close together as possible to ensure good co-registration. 32) 33) 34) 35) 36) 37) 38)
Device | Observation geometry | Swath width | Pixel/footprint size | Sampling distance | |
Horizontal | Vertical | ||||
ATLID | 2º offset to along-track direction | Single pixel | < 30 m | < 100 m | 100 m |
CPR | Nadir view | Single pixel | ~ 750 m | 1 km | 100 m |
MSI | Nadir view | 150 km | 500 m x 500 m | 500 m | - |
BBR | Nadir view | Single pixel | 10 km x 10 km | 10 km | - |
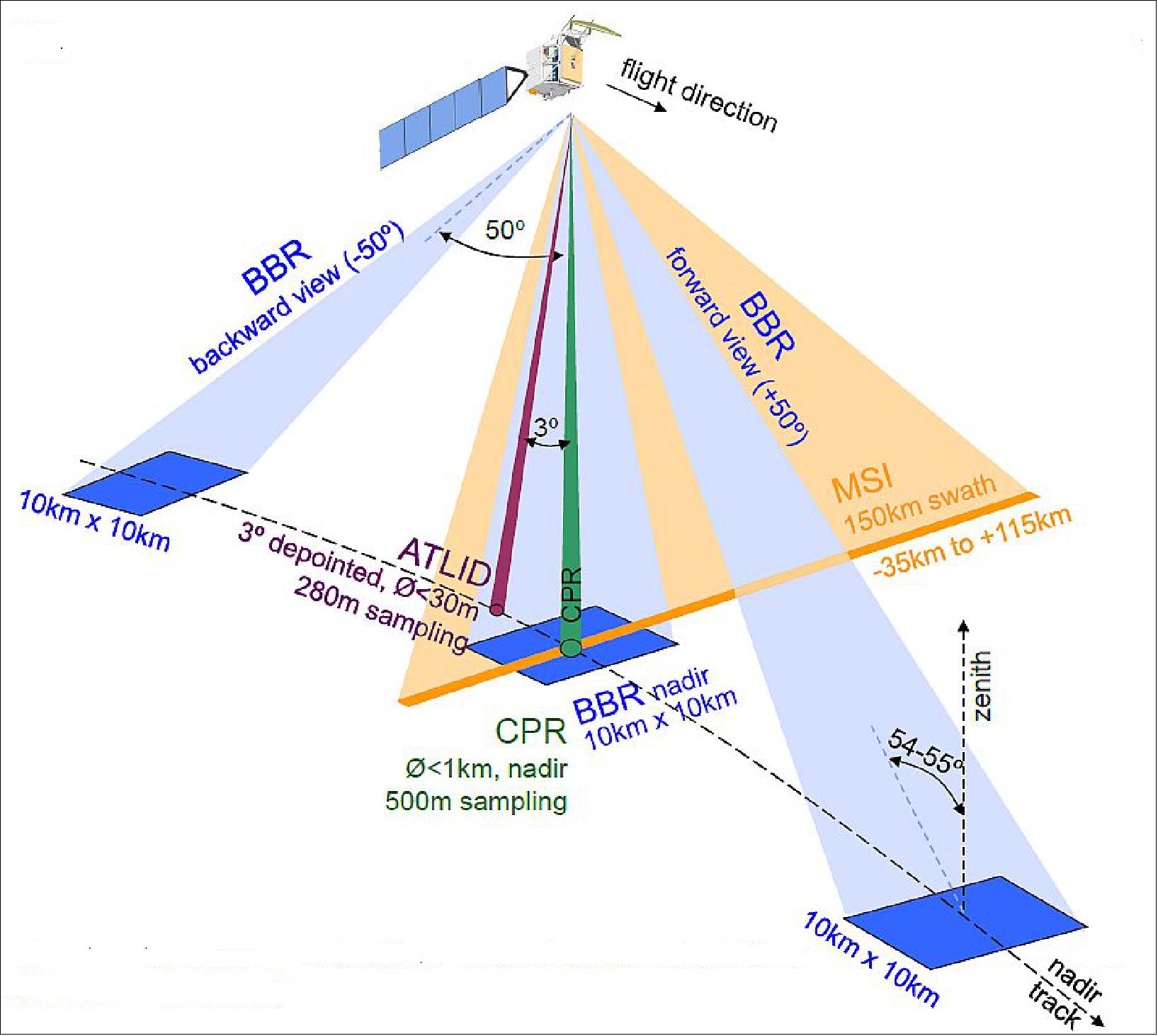
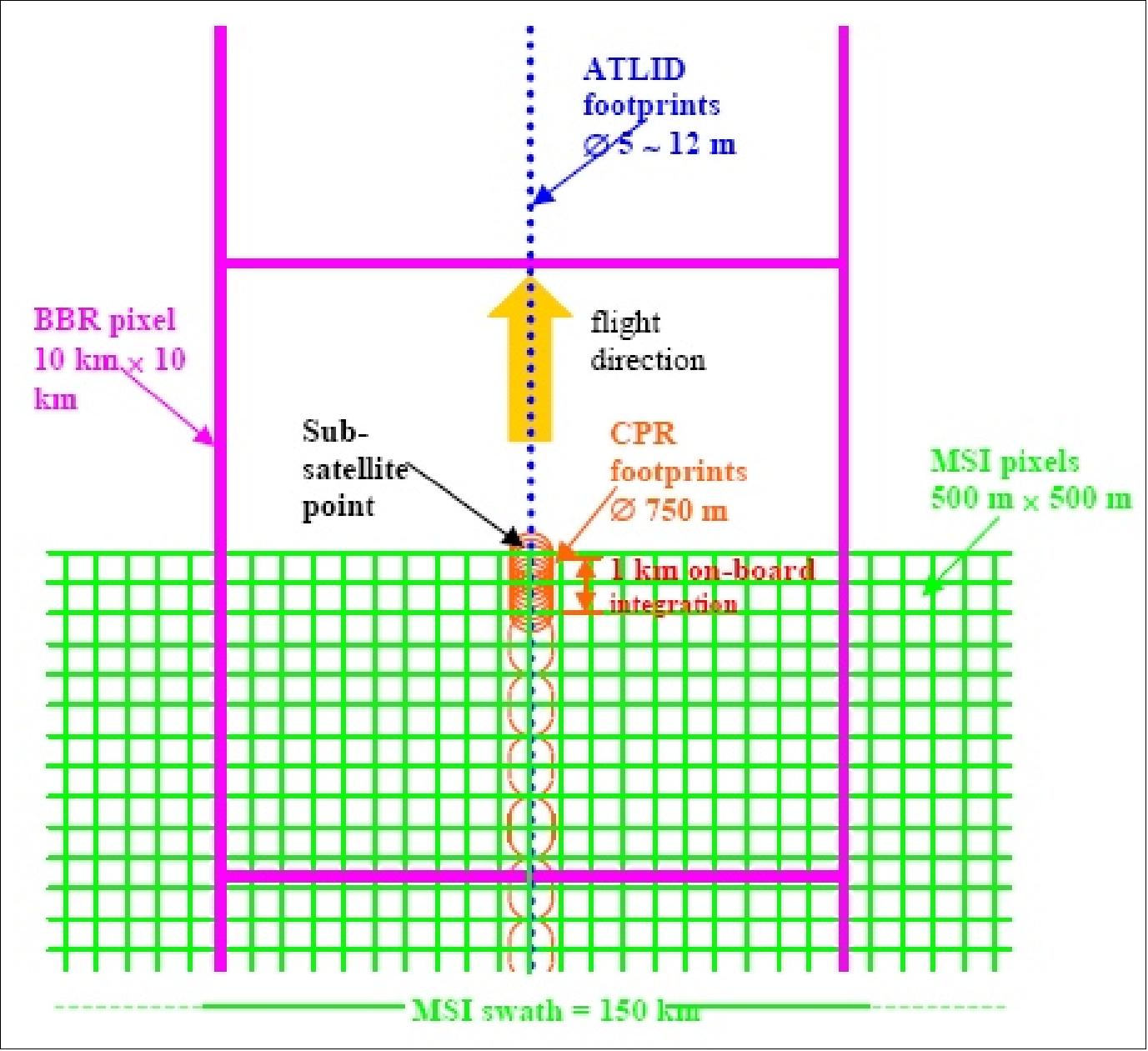
The relative locations of the instrument footprints are illustrated in Figure 22. A lidar-radar co-registration requirement of 350 m (goal: 200 m) has been formulated under the assumption that the radar footprint (750 m) will always overlap the lidar one (30 m). The same requirement has been set for the MSI pixels. The assessment of the satellite design implications has shown that even stricter requirements can be met.
ATLID (Atmospheric Lidar)
ATLID is an ESA backscatter lidar instrument (active instrument) of Airbus DS (former EADS Astrium SAS, instrument prime), developed at Selex-Galileo, Florence, Italy. The objectives of this core instrument are to:
• Detect vertical profiles of radiatively significant clouds/aerosols (extinction coefficient alpha > 0.05 km-1); alpha backscatter sensitivity of 8 x 10-7 m-1 sr-1 (10 km horizontal integration)
• Derive cloud and aerosol optical depth and identify particle type and habit:
a) alpha dual wavelength or HSRL (High-Spectral Resolution Laser),
b) alpha measure depolarization
Parameter | Mie co-polar channel | Rayleigh channel | Mie cross-polar channel |
Cirrus optical depth | 0.05 | ||
Backscatter sr-1 m-1 | 8 x 10-7 | 2.6 x 10-5 | |
Vertical resolution | 100 m | 300 m | 100 m |
Horizontal resolution | 10 km | ||
Required accuracy | 50% | 15% | 45% |
A telescope footprint smaller than 30 m is favoured to minimize the multiple scattering effects and to reduce the solar background noise by reducing the telescope's field of view.
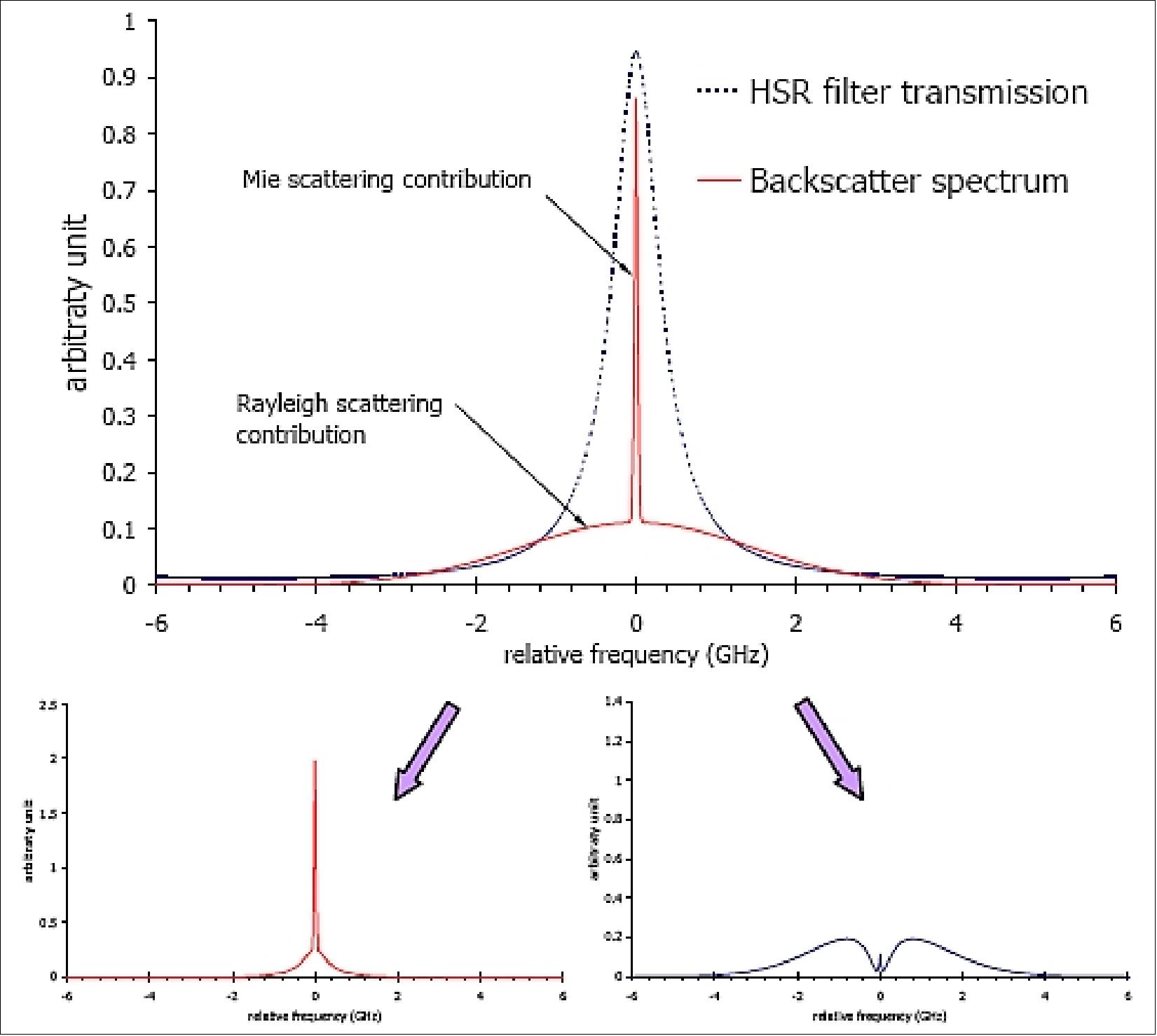
Operating in the UV range at 354.8 nm, ATLID provides atmospheric echoes with a vertical resolution of up to 100 m from the ground to an altitude of 20 km and a 500 m vertical resolution from 20 km to 40 km altitude. Thanks to high spectral resolution filtering, the lidar is able to separate the relative contribution of aerosol (Mie) and molecular (Rayleigh) scattering, which gives access to aerosol optical depth. Co-polarized and cross-polarized components of the Mie scattering contribution are also separated and measured on dedicated channels. 40) 41) 42)
The measurement principle of ATLID uses the fact that the interaction of light with molecules or aerosols leads to different spectra. Whereas the Brownian motion of molecules induces a wide broadening of the incident light spectrum, the single scattering with an aerosol does not affect the spectrum shape of the incident light. As a consequence, a simple means of separating the contributions consists in filtering the backscattered spectrum with a high spectral resolution filter centered on the central wavelength, as depicted in Figure 23.
The instrument provides a sequence of samples of the temporal profile, proportional to the laser pulse energy and collecting area. The instrument design uses an Nd-YAG laser operating at the third harmonic (354.8 nm). A master oscillator stabilized by an injection seeder emits the laser line. A beam expander shared with the half-meter diameter receiving telescope magnifies the laser beam. This monostatic configuration ensures that the photons backscattered by the atmosphere are collected along the same axis as the laser beam. In this framework, possible thermo-elastic deformation of structure and optics do not affect the collecting efficiency.
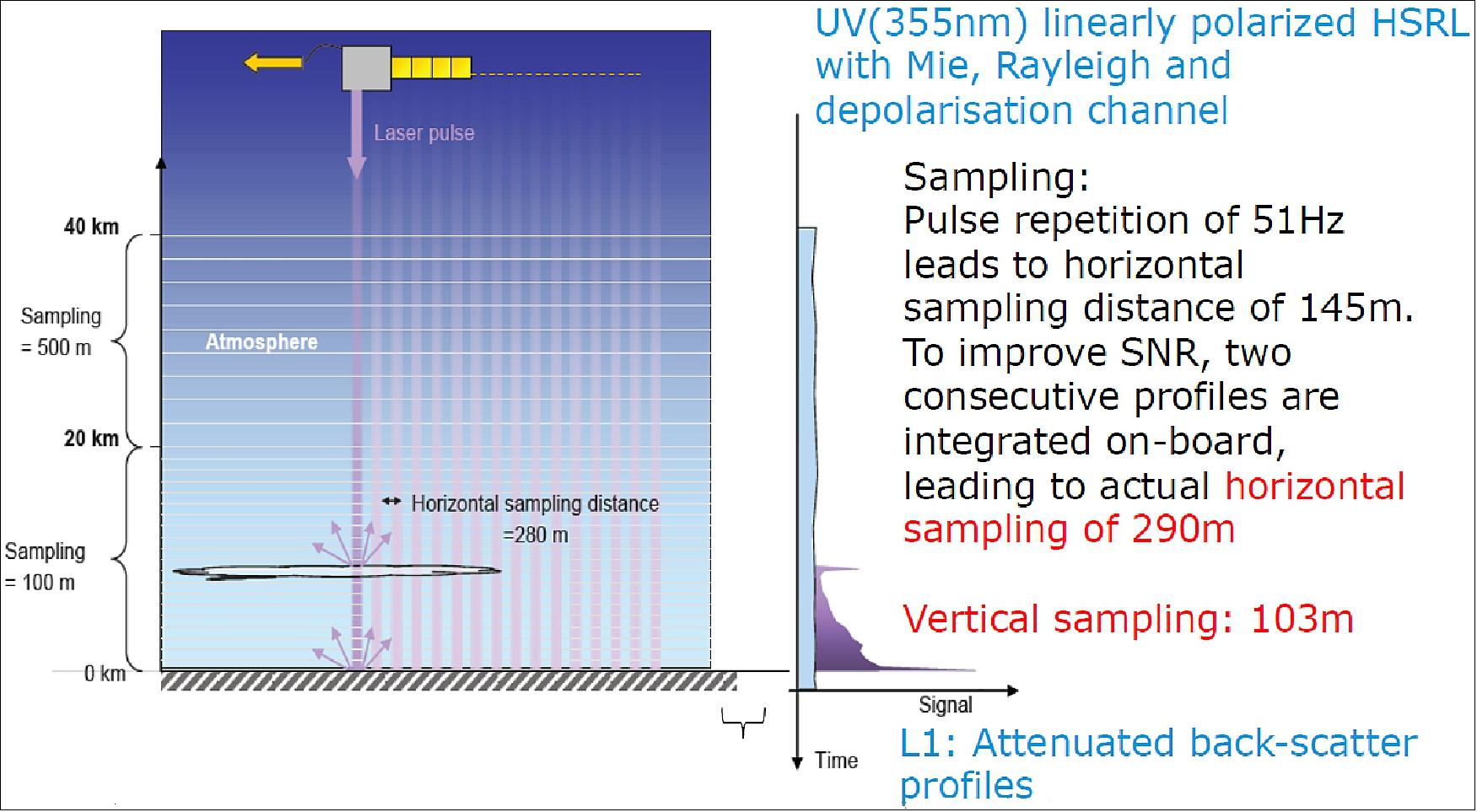
ATLID is a nadir-looking multi-FOV single wavelength lidar with a high-spectral-resolution (HSR) receiver. The device separates Rayleigh (molecular) and Mie (cloud and aerosol particles) backscatter returns. A small footprint of around 10 m (70 m separation) is favoured to minimize the multiple scattering effects and reduce the solar background noise by reducing the telescope's field of view. The full vertical resolution of 100 m is considered for the Mie channel, while data are accumulated in the vertical direction over 300 m for the Rayleigh channel. A horizontal integration length of 10 km is assumed for both channels. The SNR requirements of 2 for the Mie signal in the cirrus and of 10 for the Rayleigh are met with a good margin. An additional cross-polarization channel is implemented. The lidar is pointed slightly off the nadir by 2º in the along-track direction to avoid specular reflection. 43) 44)
Instrument Overview
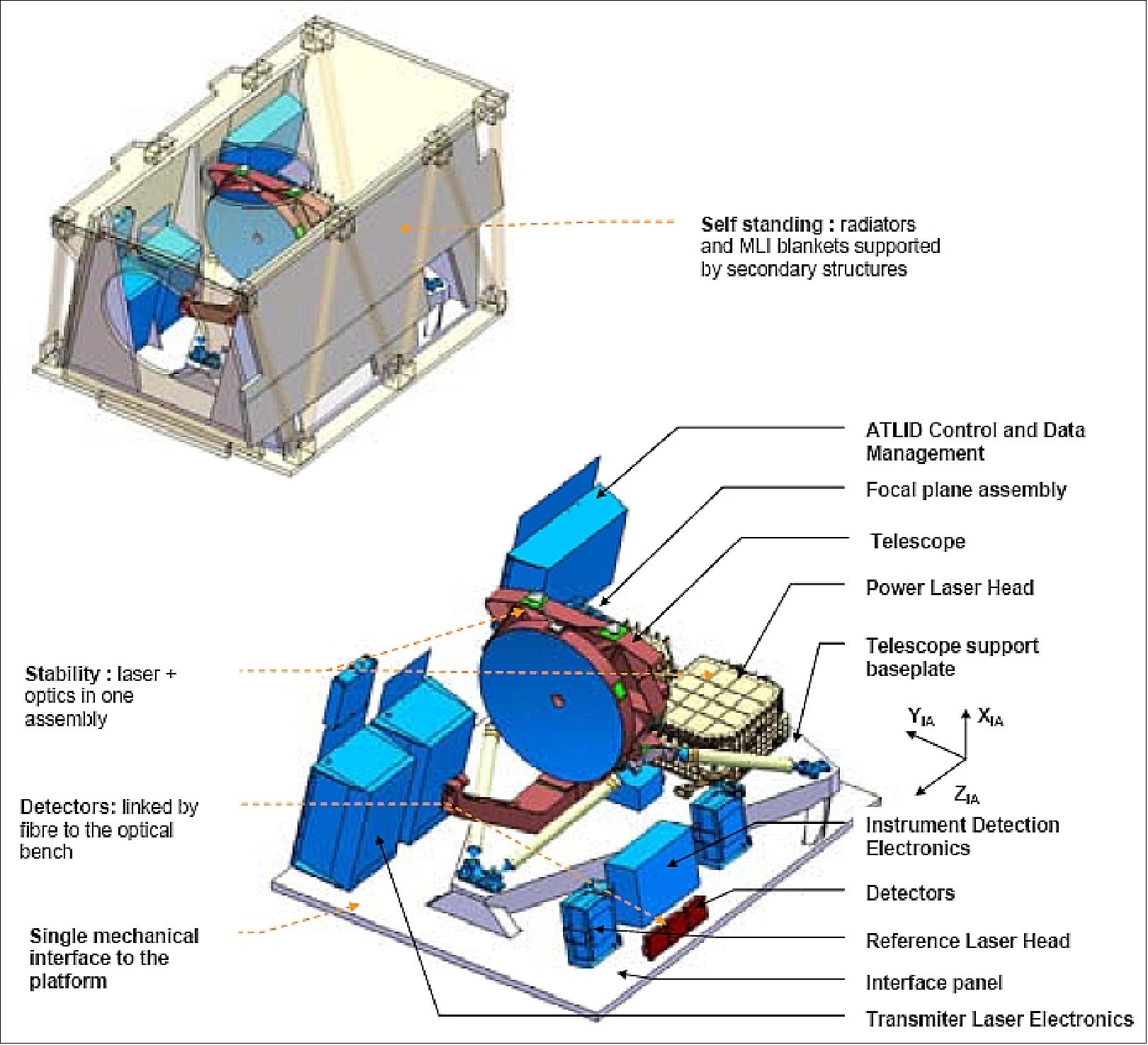
ATLID is designed as a self-standing instrument reducing the mechanical coupling of instrument/platform interfaces and allowing better flexibility in the satellite integration sequence. The lidar functional architecture is organised into four main functions, namely the transmitter, the emit/receive telescope, the receiver and the control unit called ACDM (ATLID Control and Data Management) unit (Ref. 40).
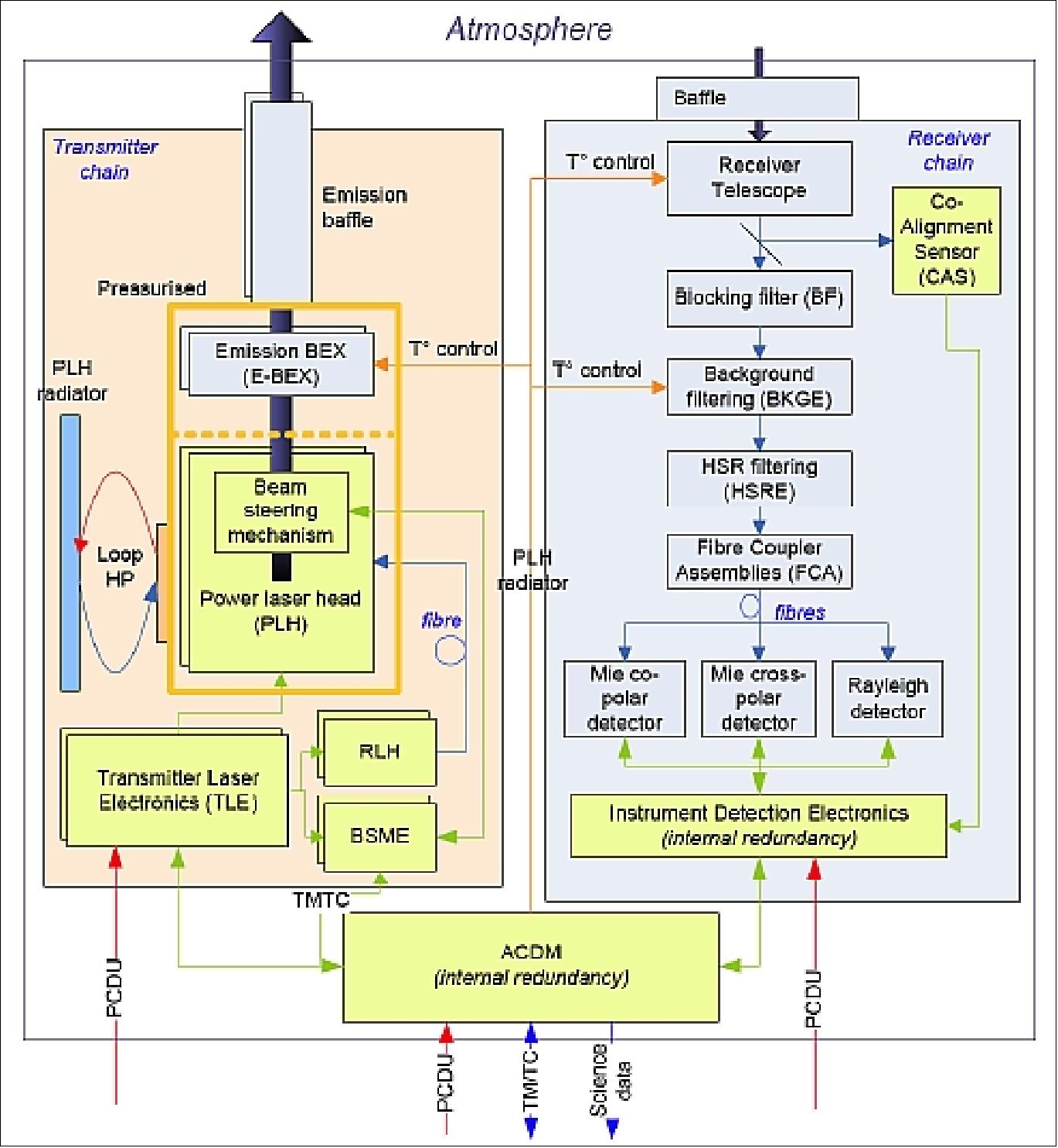
The ATLID instrument design consists of the following elements: 45) 46) 47) 48)
• Transmitter: It includes the laser head, some of the beam shaping optics and the laser electronics. The laser is a pulsed single-mode Nd-YAG laser whose frequency is tripled to the wavelength of 355 nm by means of a higher (3rd) harmonic generator (PRF of 74 Hz corresponding to 100 m ground horizontal sampling).
The laser transmitter of the ATLID instrument shall deliver high-energy pulses at a repetition rate of 51 Hz corresponding to 140 m ground horizontal sampling. The PRF (Pulse Repetition Frequency) has been changed lately allowing relaxation of the Master Oscillator requirements while using the amplifier with the same operation mode as for Aladin development. More than 35 mJ at 355 nm (tripled Nd: YAG wavelength) are required at laser output to meet the instrument's radiometric performance. At the same time, high-frequency purity (line width of typically 50 MHz) and extreme stability (50 MHz on one monthly time scale) are mandatory in order to separate the Mie and Rayleigh scattering contributions by the high spectral resolution technique.
The transmitter architecture is based on three subsystems:
- A reference laser head (RLH) providing a continuous laser seeding signal whose frequency is permanently controlled in a closed loop with respect to an ultra-stable reference cavity.
- A power laser head (PLH) injected by the reference laser by means of an optical fibre (Figure 26). It generates the laser pulses in its master oscillator section, amplifies the resulting pulses through its amplifier section, and then converts the 1064 nm laser signal into the 355 nm wavelength in its higher harmonics generation section. The q-switched master oscillator is generating single-frequency laser pulses of about 8 mJ. The oscillator cavity is folded several times for compactness reasons and the rod-shaped active material is laser diode pumped in a redundant configuration. The output of the master oscillator is then amplified in a double-pass amplifier delivering about 150 mJ. The zig-zag slab amplifier is double-side pumped with a total of eight laser diode stacks of about 700 W (derated) peak output power, each for 0.2 ms duration. The second and third harmonic generation LBO crystals are placed after the power amplifier to generate up to 50 mJ in the ultraviolet (355 nm).
- A transmitter electronics unit which contains all the control and power electronics needed for the operation of previously described PLH and RLH, and provides the TM/TC interface to the ATLID control unit.
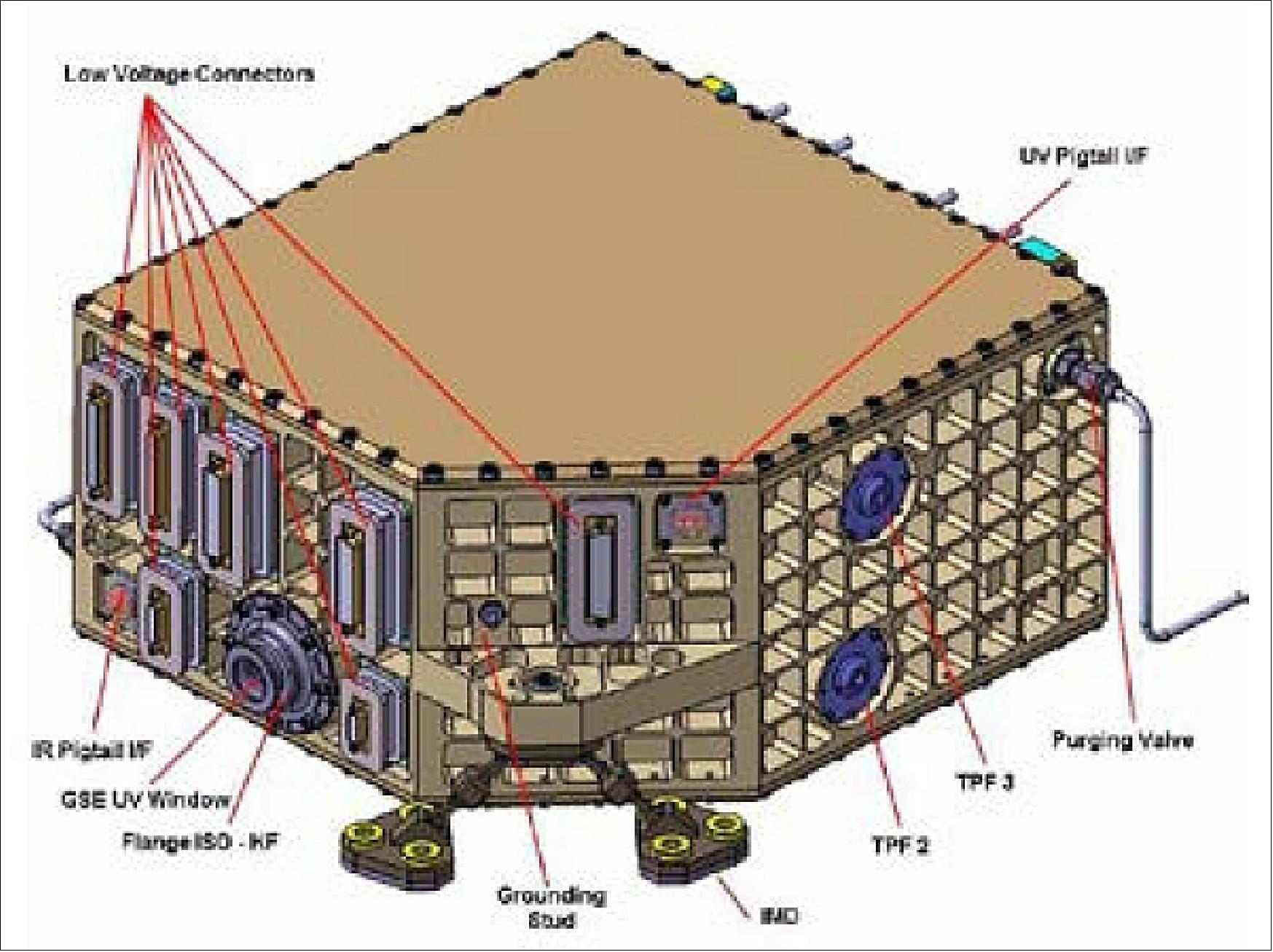
A significant evolution of the laser design with respect to the ALADIN transmitter lies in the fact that the ATLID power laser head is sealed and pressurized. This improvement is believed to ensure more stable operating conditions for the sensitive components of the laser, and to isolate the laser's internal space from surrounding contaminants over the ground and operational lifetime. Pressure is also deemed to improve tolerance to laser-induced contamination, which is the degradation of an optical surface resulting from the interaction of molecular contamination with a high laser illumination level. Such a pressurized design has been extended to the whole emission path, including the beam-expanding optics. - The laser transmitter is developed under the prime leadership of Selex Galileo with sub-contractors Quantel for the development of the amplifier and laser diodes, and TESAT for the Reference Head.
An Emission Beam Expander is used to further expand the laser beam and reduce the laser beam divergence to about 45 microradians so that it is coupled within the narrow receiver field of view. The expansion of the beam brings also a significant reduction of the energy density on the last optics submitted to the vacuum, thus beneficial for minimizing the risk of laser-induced damage and contamination. An expansion of about 7 is achieved through a 3-lens design bringing the beam to more than 100 mm in diameter. The Emission Beam Expander is developed by EADS Sodern.
Thermal control of the PLH: Another innovation is related to the thermal control of the power laser head. This sensitive active subsystem presents high heat dissipation (~ 150 W) and requires a stable interface temperature (0.5 K). Mini loop heat pipes are used in the ATLID design to efficiently evacuate the laser heat while offering a low stiffness mechanical interface; the flexible pipes which transport the ammonia from evaporators to the anti-sun side radiator allow a good mechanical decoupling of the laser with respect to its radiator, thus minimizing the stress experienced by the laser optical bench. This new mini loop heat-pipe technology was successfully validated in flight during a Foton-M3 mission (launch Sept. 14, 2007). In addition, a life test has been running for the last 2.5 years to demonstrate the lifetime of such devices. High conductance, and low sensitivity to gravity orientation during ground tests are other decisive advantages which make the loop heat pipes preferable to standard heat pipe technology for ATLID application.
• Telescope: The optical design is based on a bistatic architecture. This architecture was selected with the objective to separate the emission and reception functions allowing full pressurization of the emission path. An afocal 620 mm diameter Cassegrain telescope is used in reception, with a high magnification ratio. The receiver FOV (Field of View) is thus kept below 75 µrad, minimizing the shot noise associated with the acquisition of Earth background signal. - The design is based on an all-Silicon Carbide mirror and mounts, designed by EADS Astrium and manufactured by Mersen.

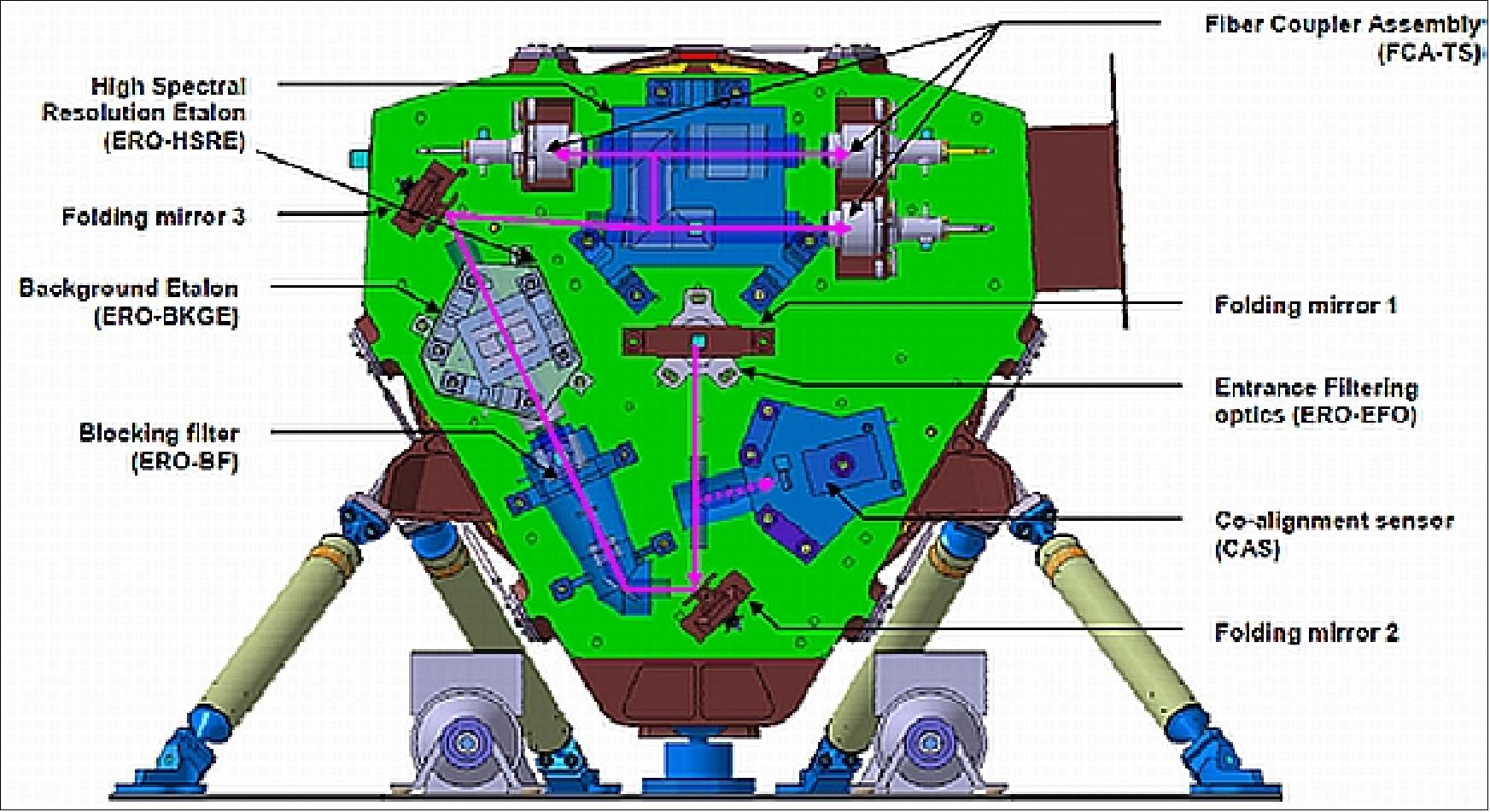
• Receiver assembly: The receiver optical design performs a separation of polarization (co-polarized and cross-polarized signals) and spectral components (Mie or Rayleigh scattering contributions) with the constant goal to limit the cross-talks between each of the three channels, namely the Mie co-polarization, the Mie cross-polarization and the Rayleigh channels. Several filtering stages (narrowband interference filter, spatial filter and Fabry-Perot etalon) are required to achieve such purity and to reject the high amount of Earth background signal around the narrow laser wavelength.
The High Spectral Resolution Fabry-Perot etalon features narrow bandwidth of the order of 0.3 pm. The spectral co-registration approach consists in periodically tuning the laser transmitter frequency to the high spectral resolution filter peak transmittance by sweeping the laser frequency over its tuning range and estimating from the signal distribution on Mie and Rayleigh channels the best frequency command.
• Low Light Level CCD's (L3CCD) and PMT (Photo-Multiplier Tubes) are considered as candidate detectors. A wavelength tuning capability is needed to ensure in-flight relative calibration of the aerosol channel and of the molecular channel and possibly, for Earth Doppler compensation. This can be achieved either with a wavelength-tunable laser or wavelength-tunable Fabry-Perot etalon.
Extremely low noise detection chain: The ATLID detection chain must be able to measure single photon events to meet the worst-case radiometric performance requirements. Therefore, a high response together with extremely low noise are necessary to fulfil the signal acquisition requirement. As for the ALADIN instrument, ATLID encompasses a memory CCD. The ATLID design performs fast sampling of the echo signal (1.5 MHz corresponding to 100 m vertical sampling distance) and on-chip storage of the echo samples which allows delayed read-out at very low pixel frequency (typically below 50 kHz). Combined with an innovative read-out stage, the detection chain provides an extremely low noise measurement of less than 3 e- rms per sample. Accumulation of several consecutive echoes on the chip is also possible with the detector design, enhancing the acquisition chain radiometric performance, especially at night when detection chain noise is limiting the signal-to-noise performance. E2V develops the detector while CRISA develops the detection chain electronics.
• ACDM (ATLID Control and Data Management) unit. It provides the following functions: synchronization between laser emission and data acquisition; data processing; mechanism drive for redundancy; thermal regulation; TM/TC support; instrument mode management.
The optical bench features a transmit/receive switch based on a passive diplexer and uses a polarizing beam splitter. The transmit/receive optics comprise a field stop, a coarse background etalon, and an interference filter for the Earth background rejection. The Mie/Rayleigh backscattering separation is based on the HSR filter (Fabry-Perot etalon). Three identical DFUs are used for the three channels (Mie co-polarized, Rayleigh and Mie cross-polarized channels), including optics, detector and proximity electronics. The detector is an L3CCD (Low Light Level CCD) optimized for UV sensitivity (quasi photon-counting capability).
Pointing | 2º offset nadir in the along-track direction |
Vertical sampling | 100 m in the altitude range 0.5-20 km |
Along-track sampling interval | 200 m |
Operating wavelength | 354.8 nm (tripled Nd:YAG wavelength) |
Telescope primary mirror aperture diameter | 600 mm |
Laser pulse energy, transmit pulse width | 30 mJ, 20 ns |
PRF (Pulse Repetition Frequency) | 74 Hz |
Receiver FOV (Field of View) | 25 µrad |
HSR filter FWHM (Full Width Half Maximum) | 0.35 pm |
Source data rate | 642 kbit/s |
Instrument mass, average power, size | 389 kg,, 310 W, 160 cm x 148 cm x 93 cm |
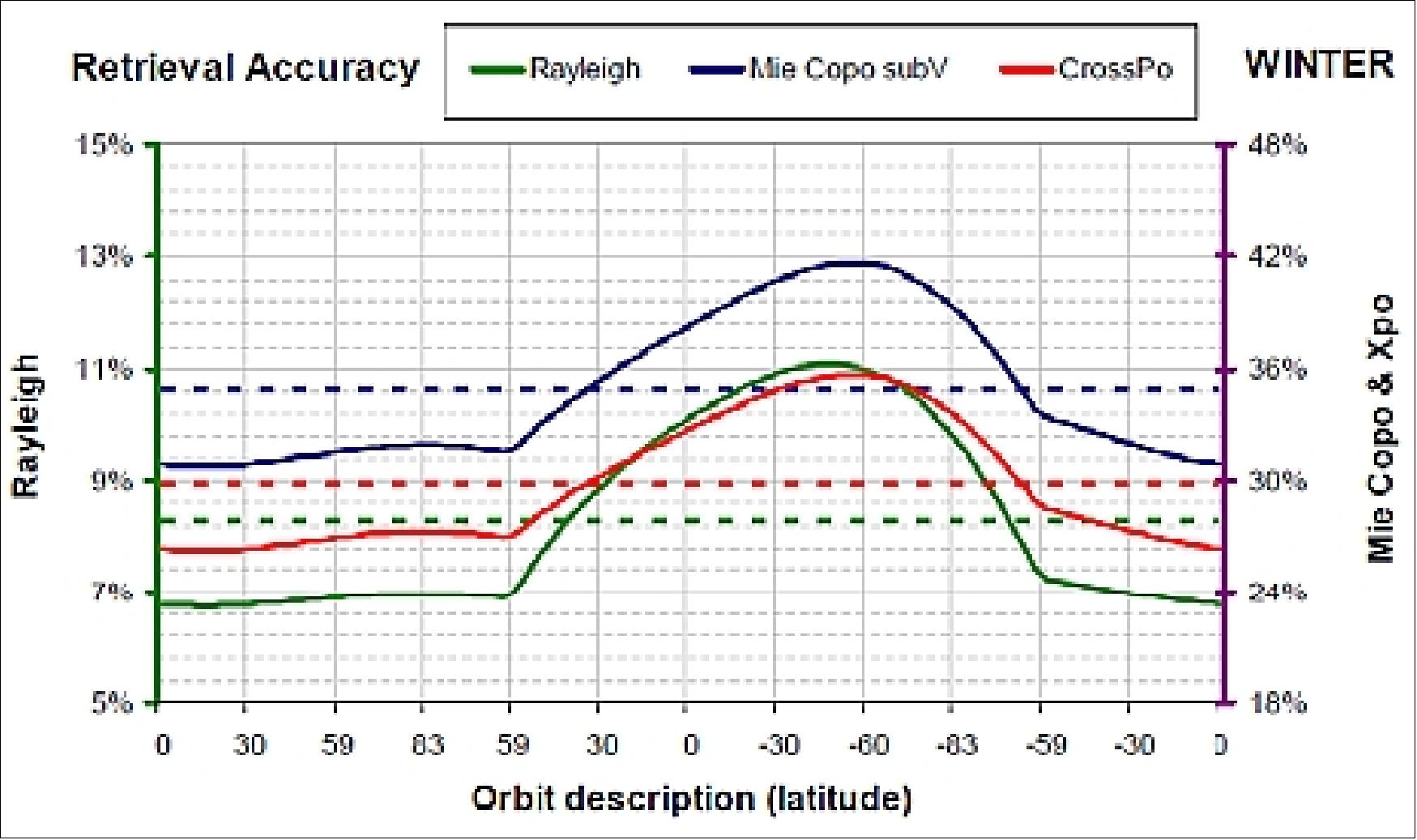
ATLID performance: The retrieval of thin cloud optical depth and aerosols' physical parameters requires the knowledge of both backscattering contributions of molecules (Rayleigh scattering) and aerosols (Mie scattering). The reference target is an unpolarized subvisible cirrus cloud between 9 and 10 km altitude, with a backscatter coefficient of 8 x 10-7 m-1 sr-1 and an extinction coefficient of 5 x 10-5 m-1 sr-1, measured in daytime conditions above a dense cloud deck at an altitude of 4 km. At the maximum geodetic altitude of the orbit (425 km), the absolute accuracy of the derived input signal is below 40% for the Mie scattering signal and below 11% for the Rayleigh scattering signal.
The retrieval accuracy of the Mie and Rayleigh scattering in the above conditions is plotted as a function of orbit position in Figure 32. The instrument is also able to measure the depolarized backscatter signal of a subvisible cirrus in the same background conditions: when the cirrus backscatter coefficient is 2.6 x 10-5 m-1 sr-1 and its depolarization ratio is 10%, the absolute accuracy of the derived input signal is better than 35% for the Mie scattering signal.
A simulation study was performed to investigate the potential of a spaceborne 355/532 nm HSRL (High Spectral Resolution Lidar) with additional 1064 nm and depolarization channels regarding aerosol type identification and the retrieval of microphysical properties and aerosol single scattering albedo. The study is part of the ICAROHS (Inter-Comparison of Aerosol Retrievals and Observational requirements for multiwavelength HSRL Systems) project of ESA/ESTEC (European Space Research and Technology Center). 49)
The study shows unique applications of this measurement method. However, spaceborne lidar applications must be based on the HSRL technology. ADM-Aeolus and EarthCARE will embark on the first-ever space-borne HSRL instruments, however, with a single wavelength only. The development of a spaceborne multiwavelength HSRL can be regarded as the next revolutionary step in lidar history.
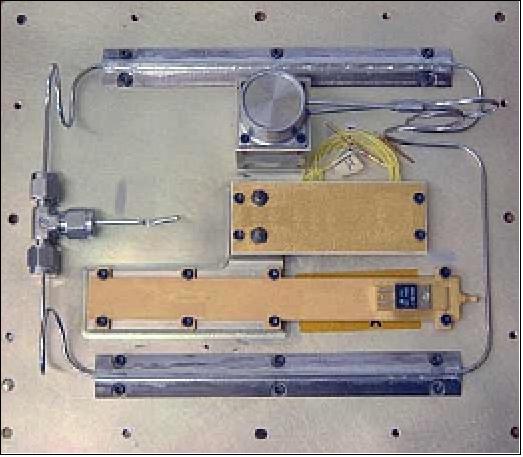
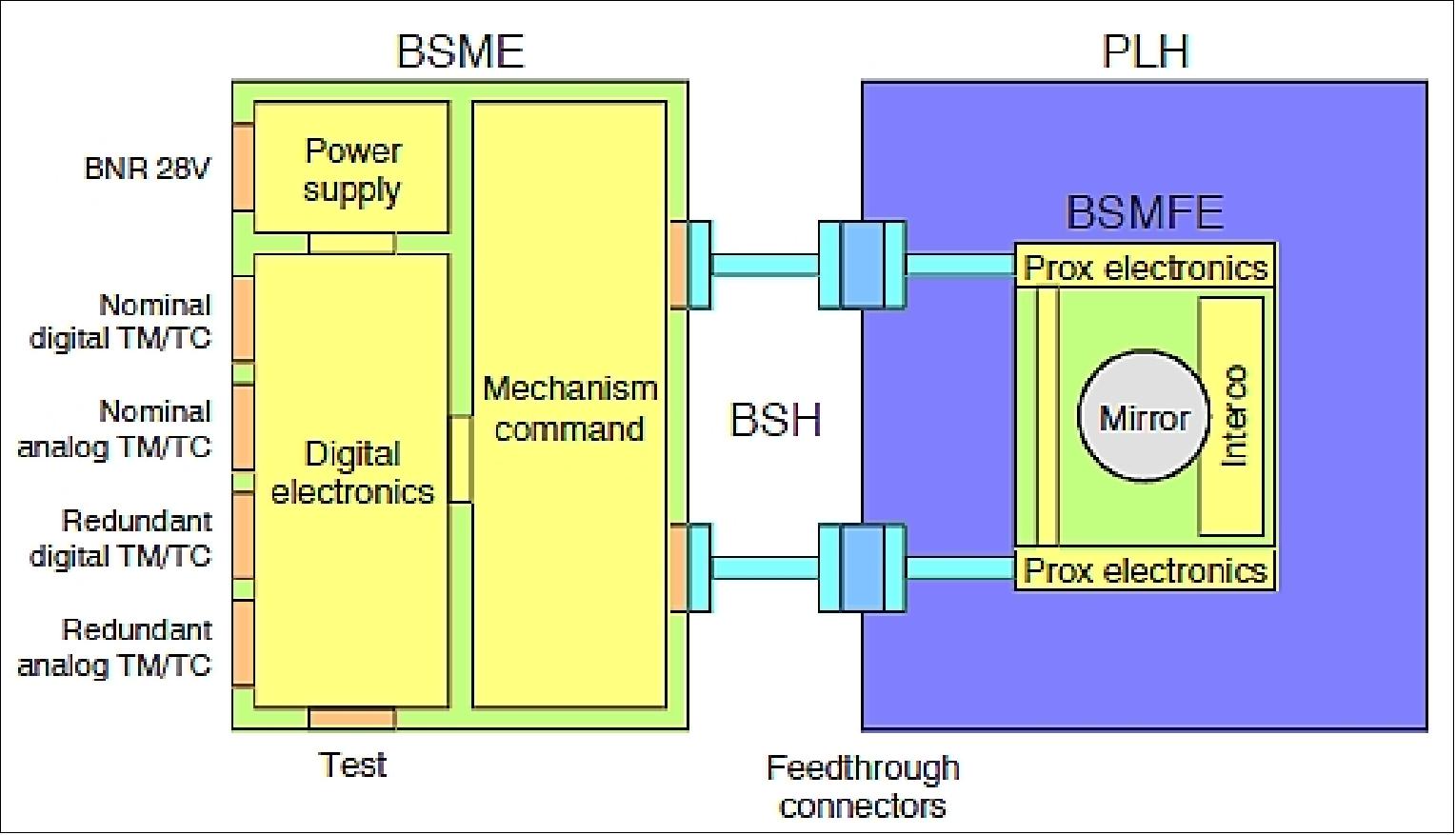
BSA (Beam Steering Assembly): A BSA is deviating a pulsed high-energy UV laser beam to compensate for the pointing misalignment between the emission and reception paths of ATLID with very high stability and high resolution. The BSA is a 2-axis small range pointing mechanism, implemented in Power Laser Head Optical Bench, inside the pressurized PLH. 50)
The BSA is composed of:
• A unit including optics, mechanics and electronics (BSMFE) made of two subassemblies: a Mechanism equipped with the tip-tilt mirror (BSM) and Front End Electronics (BSFE), implemented in the PLH
• An Electronics Unit (BSME), implanted on the instrument panel
• A Harness (BSH) composed of two cables, connecting the two units.
CPR (Cloud Profiling Radar)
CPR is a nadir-looking active instrument (94 GHz) of JAXA and NICT (joint development), Tokyo, and a core instrument of EarthCARE. The objective of the CPR is to provide vertical profiles of cloud structure along the subsatellite track to obtain micro- and macroscopic properties of clouds. The requirements call for: 51) 52) 53) 54) 55) 56) 57) 58)
• Detect radiatively significant ice clouds [extinction (alpha) >0.05 km-1] alpha radar sensitivity of -38 dBZ (10 km horizontal integration) alpha 500 m vertical range resolution
• Identify precipitation and vertical motion:
a) alpha Doppler measurements,
b) accuracy 1 m/s.
This provides information on the convective motion.
CPR is a classical pulsed CW (Continuous Wave) radar operating with a fixed downwards-looking pencil-beam antenna. It transmits a stream of microwave pulses and is able to measure backscattered energy from cloud particles whilst maintaining the capability to penetrate lower layers of the cloud; its design includes a unique capability to measure Doppler shift in the cloud return signals which will allow retrieval of cloud particle vertical velocity (Ref. 37).
This latter measurement is performed by measuring the phase shift between corresponding echo samples of successive transmit pulses; via the Doppler effect, the observed phase difference together with a knowledge of the exact satellite pointing can be used to infer the upward/downward speed of the cloud particles. The success of this measurement is strongly dependent on the dimension of the radar antenna in the along-track direction and as a consequence, there is a need for a large antenna – the realization of such a large millimetre-wave antenna and maintenance of its pointing are critical aspects of the instrument. The measurement is furthermore dependent on there being little scene decorrelation between pulses and this imposes the need for high pulse repetition frequencies (Ref. 37).
A unique feature of the CPR is the emission of microwave pulses that penetrate deep into lower cloud layers, which cannot be viewed by passive optical sensors or reached by the lidar. The CPR is designed to attain a high sensitivity. In addition, the concept of Doppler measurement of cloud particles is newly introduced in this program. A principle of Doppler radar measurement is the detection of the phase difference between echo signals from two consecutive radar pulses provided that the correlation between them is sufficiently high. The accuracy in Doppler velocity in the radial direction expected here is better than 1 m/s. A correction technique is proposed that uses the Doppler velocity estimate of the surface backscatter as a zero-Doppler reference in order to cancel biases caused by variations in satellite attitude and altitude. 59)
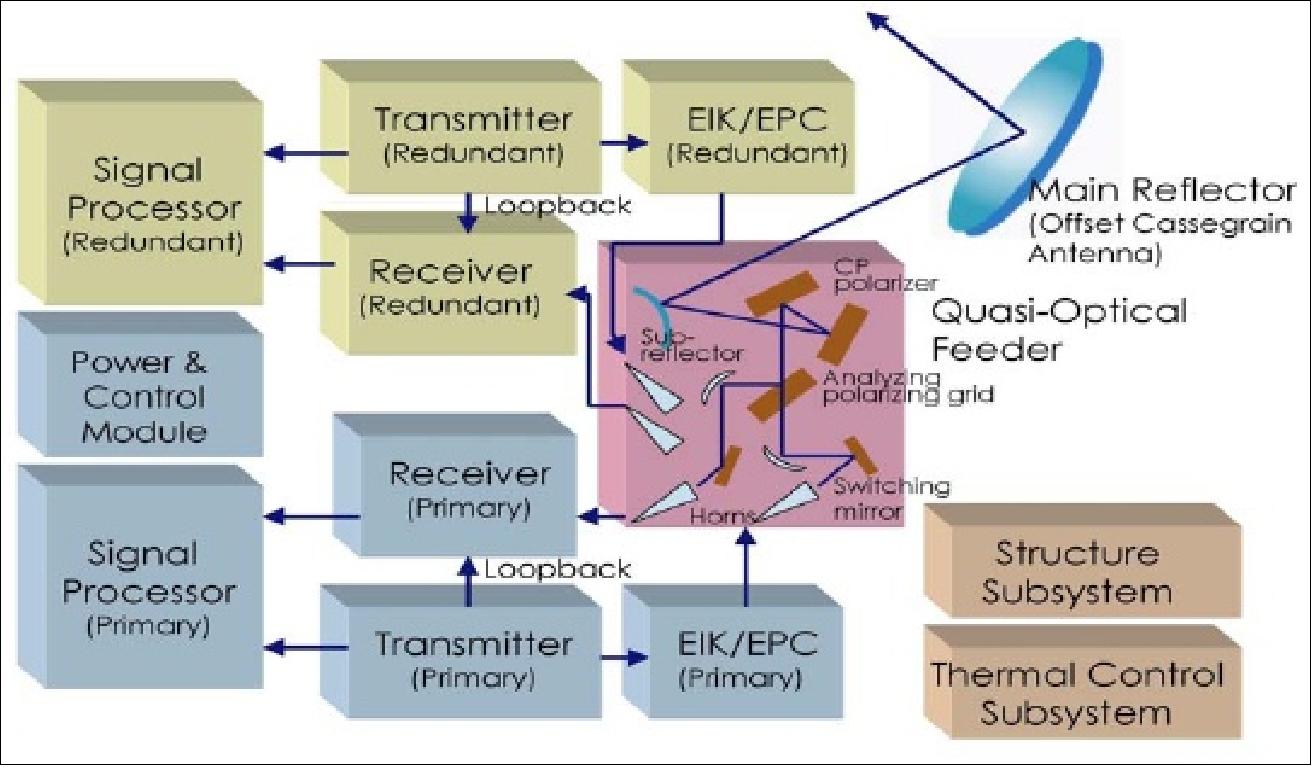
CPR consists of the following subsystems:
- The antenna reflector (2.5 m diameter) and antenna feed subsystem including a diplexer (circulator)
- The RF (Radio Frequency) subsystem includes the HPT (High Power Transmitter) and an EIK (Extended Interaction Klystron), low noise amplifiers and redundant switches. The HPT is comprised of a high voltage EPC (Electronic Power Conditioner) provided by SELEX Galileo of Italy, and a high power EIK provided by CPI (Communications & Power Industries), Canada. 60) 61)
- Frequency converter subsystem containing up- and down-conversion chains, pulse generator and frequency generator
- The signal processing subsystem containing both logarithmic intensity detection and additional signal phase detection for the pulse-pair processing in the Doppler mode.
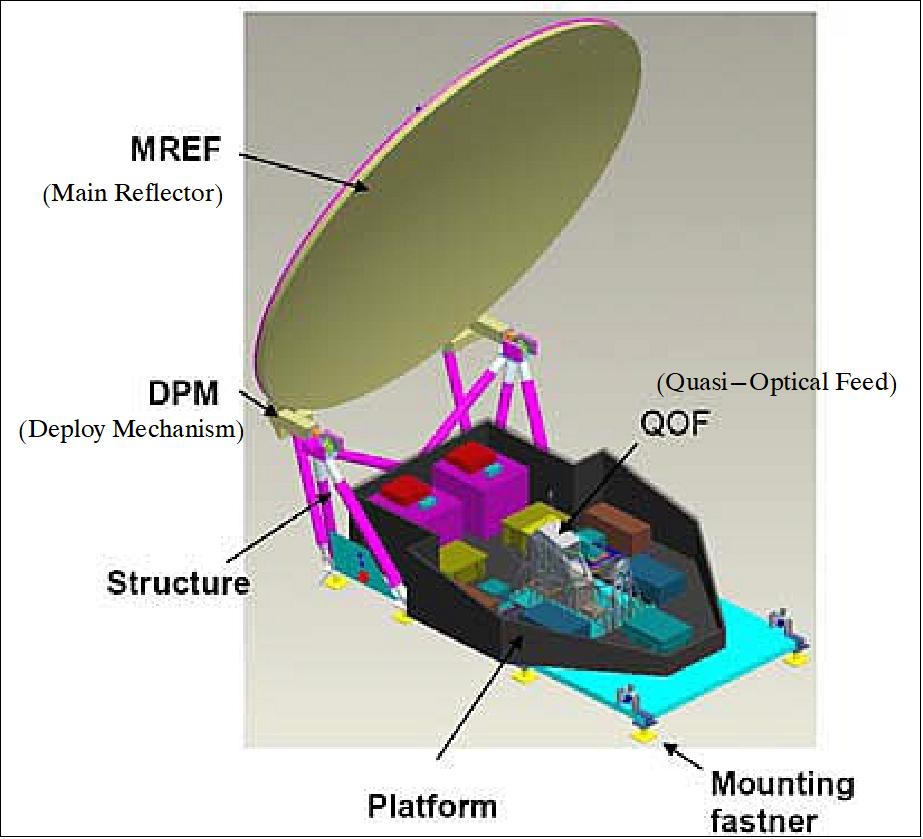
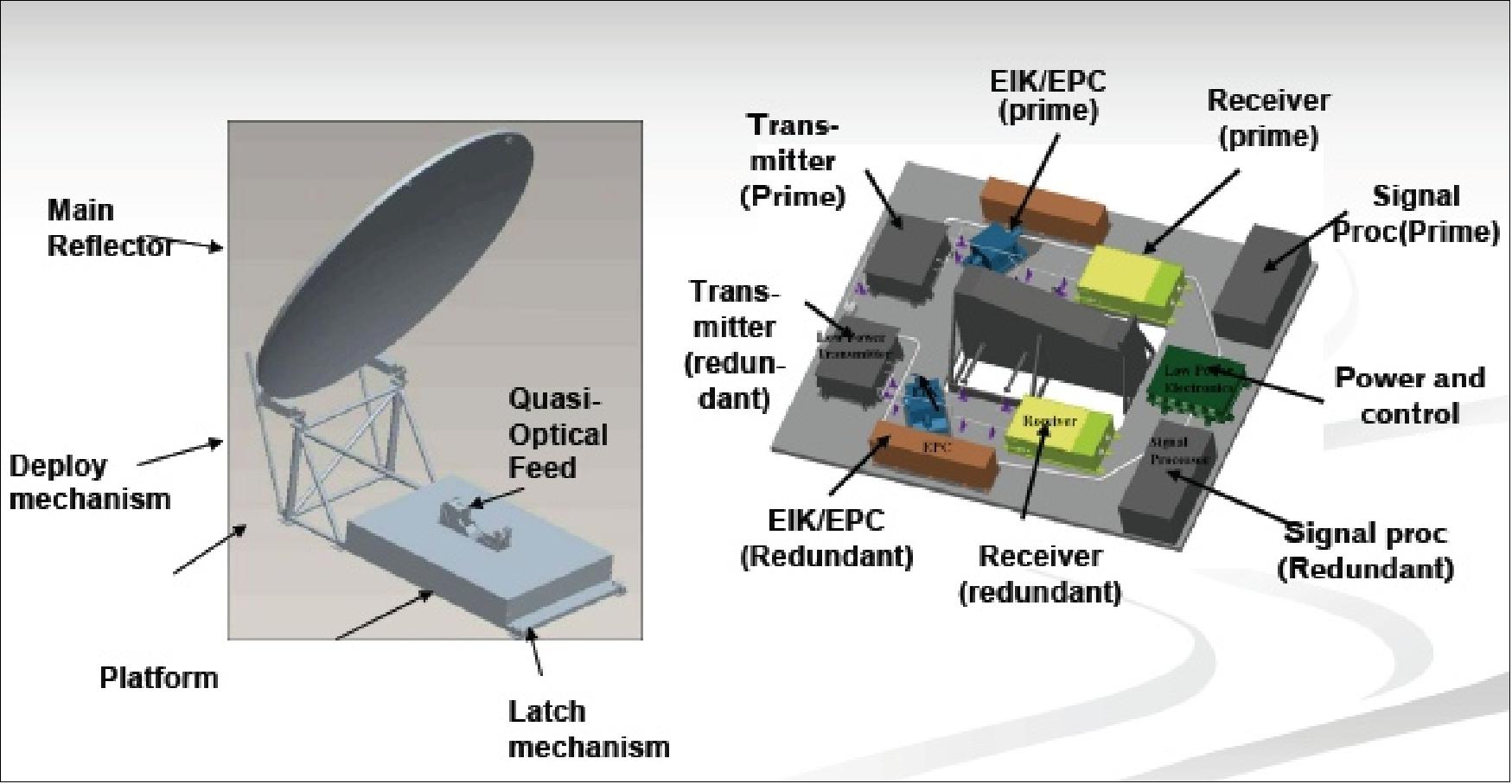
CPR has a fully redundant configuration of the transmitter, receiver, and signal processor. An offset Cassegrain antenna of 2.5 m ∅ is used to get high antenna directivity. A CFRP (Carbon Fiber Reinforced Plastic) sandwich structure is used for antenna stiffness. A QOF (Quasi-Optical Feed) system technique with an integrated hyperbolic subreflector is used for the antenna feeder to achieve high-performance antenna radiation characteristics and sufficient isolation between the transmitted and received signals with low insertion loss. 62) 63) 64)
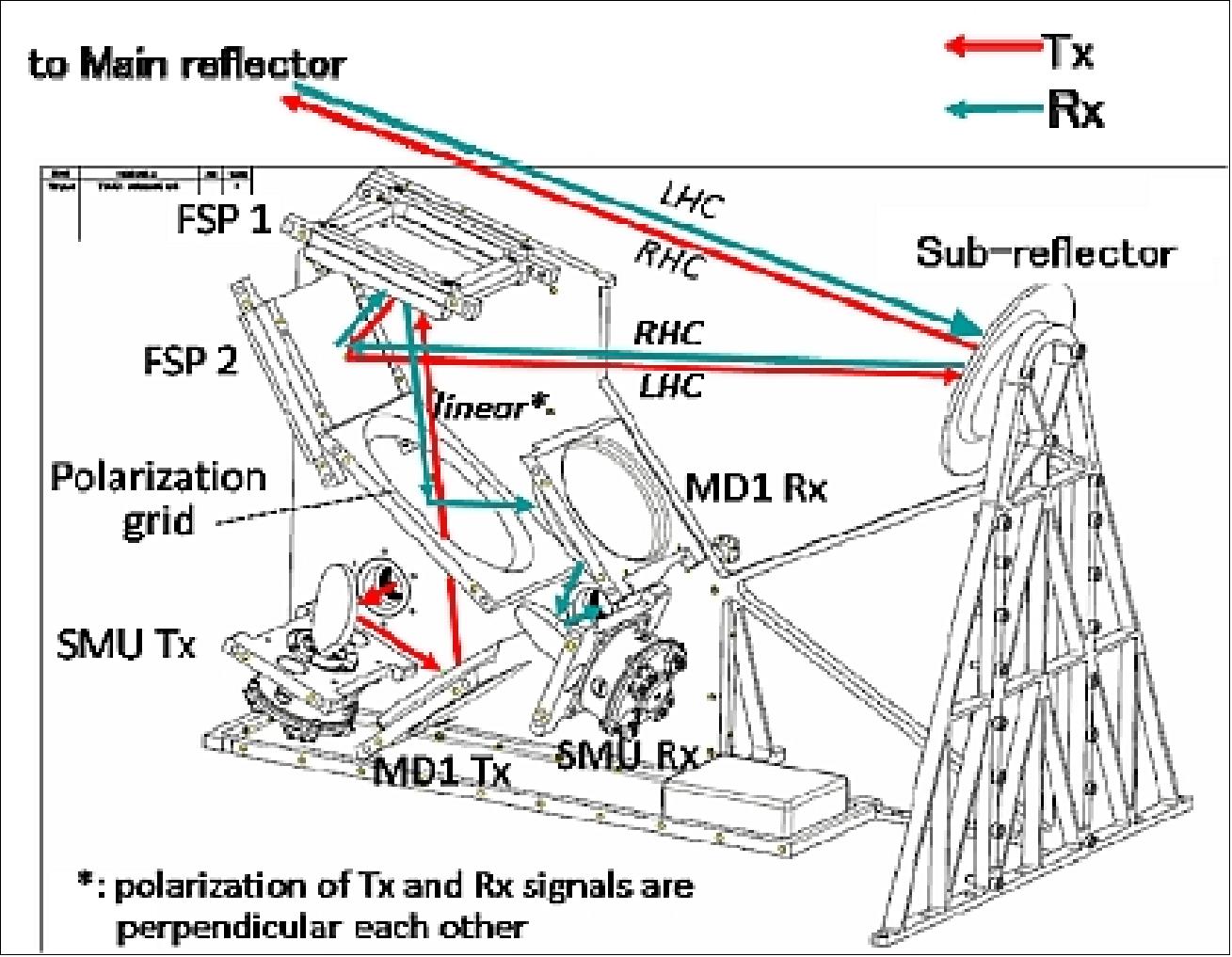
The QOF, developed at Astrium GmbH for NICT, converts the linear polarized Tx and Rx waveguide signals into circular polarized transmit and receive beams, providing high isolation of the Tx and Rx channels, across the system bandwidth of 7 MHz. In particular, the QOF consists of planar mirrors, refocusing mirrors, a polarization grid and a Martin-Puplett interferometer. The design of the QOF is optimized in order to use the minimum number of components with minimized size, for quasi-optical good undistorted transmission. 65) 66)
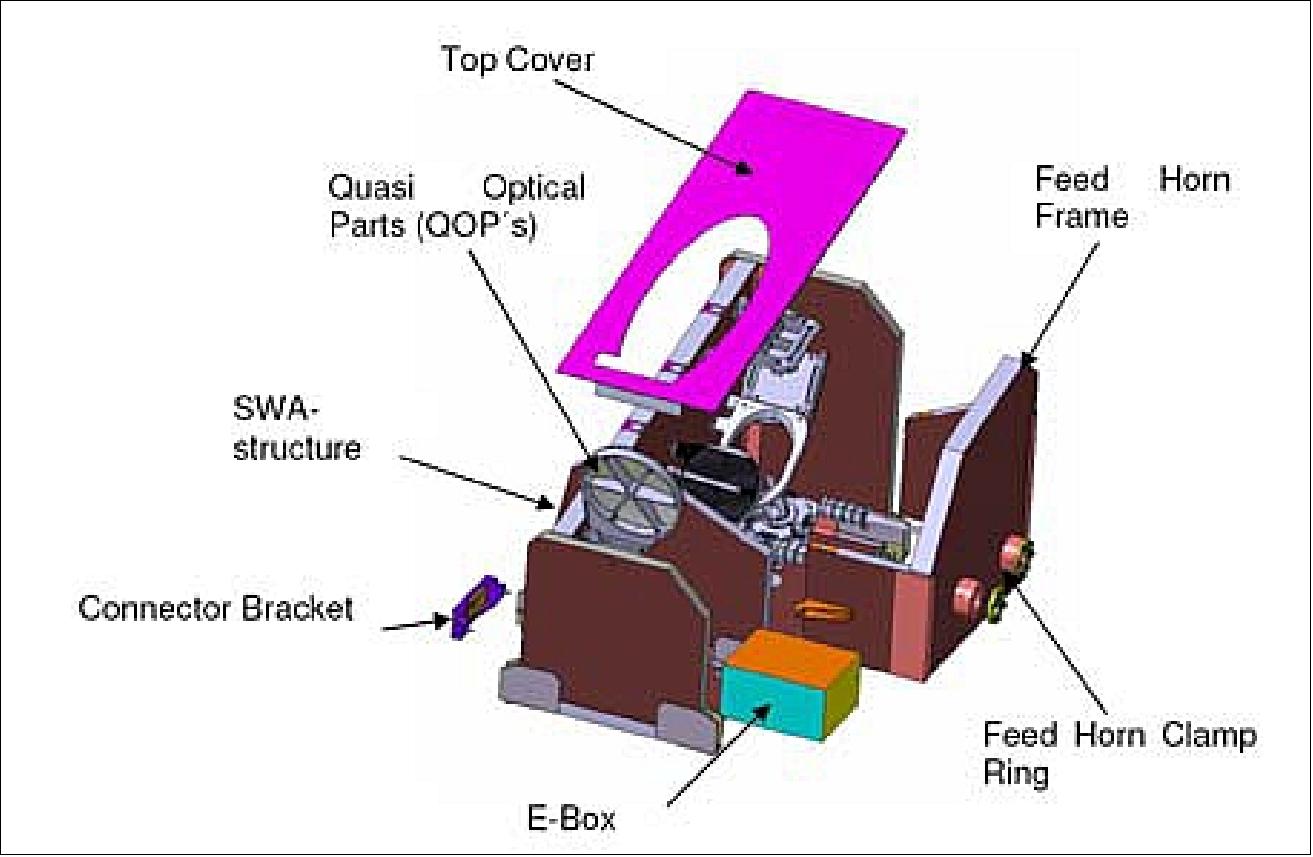
The primary feed consists of quasi-optical parts such as a polarization grid and circular polarizer. These parts are assembled with a sub-reflector and main/redundant switching mirror, and installed in one hard optical bench which is made by CFRP. This bench is designed to reduce thermal deformation in orbit and very accurately installed an offset Cassegrain system to keep alignment with the main reflector. The QOF also has the function of measuring the transmission power.
The antenna feed subsystem is basically a multiplexer operating at 94.05 GHz, the feed subsystem is required to take high-power signals from a waveguide-based EIK (Extended Interaction Klystron) source and feed the antenna subreflector. Returning signals, reflected from clouds, are to be passed from the antenna subreflector to an LNA receiver.
For the provision of redundant transmit and receive channels, switches in form of a mechanical rotating mirror and redundant feeds are employed in the QOF. Further, the QOF has to provide high isolation between the source and receiver and low insertion loss. For measurement of the transmitted signal power, the QOF contains a power monitor subsystem.
The CPR instrument has a mass of 240 kg, power consumption of 300 W, and a data rate of 270 kbit/s. The size of the stowed instrument is: 2.5 m x 2.7 m x 1.3 m; the deployed dimensions are: 2.5 m x 2.7 m x 3.6 m. 67)
CPR operates at a single frequency of 94.05 GHz (W-band), linear polarization, from 0 to 20 km altitude in two modes, nominal with 400 m vertical resolution and secondary with 385 m vertical resolution. The requirements call for a CPR/ATLID footprint collocation, putting severe constraints on the pointing accuracy, i.e., co-alignment of both instruments to meet the requirement of 350 m rms.
Parameter | Value | Parameter | Value |
Center frequency | 94.05 GHz ±3.5 MHz | Transmit polarization | LHCP @ TX, RHCP @ RX |
Transmitter peak power @ EIK | 1.6 kW @ BOL | Radar beam pointing | Fixed vertical (nadir) |
Vertical range | -0.5 to 20 km (-0.5 to 12 km at high latitude beyond ± 60º) | Vertical resolution | 500 m (sampling 100 m) |
Horizontal range | ~ 650 m cross-track and 1 km along-track | Sensitivity | ≤-35 dBZ at TOA (10 km integration) |
Antenna aperture size | 2.5 m diameter | Beam footprint size | ~750 m (IFOV= 0.095º) |
Doppler measurement accuracy | ≤ 1 ms-1 for cloud vertical motion | Minimum sensitivity | -35 dBZ |
The sensitivity estimate as a function of altitude is given for a single cloud layer under two types of model atmospheres: Mean Annual Tropic and Summer Mid-Latitude (Table 7). The sensitivity is defined as the radar reflectivity factor for which the total radiometric accuracy of 1.7 dB is achieved for an integration distance of 10 km.
Note: In the term dBZ, Z is the equivalent radar reflectivity that gives a mean power equal to the standard deviation after integration and noise subtraction; atmospheric attenuation is not included.
Parameter | Value | ||
Vertical resolution | ≤ 500 m | ||
Radiometric resolution | ≤ 1.44 dB | ||
Total radiometric resolution | ≤ 1.7 dB without a bias component included | ||
| Altitude (km) | Mean annual tropic | Summer mid-latitude |
0.5 | -34.8 | -35.9 | |
1.0 | -35.5 | -36.2 | |
2.0 | -36.7 | -37.0 | |
4.0 | -37.6 | -37.7 | |
6.0 | -37.9 | -37.9 | |
8.0 | -38.0 | -38.0 | |
10.0 | -38.0 | -38.0 | |
Doppler estimation accuracy | ≤ 1 m/s for Z ≥ -31 dBZ (10 km integration) | ||
Table 7: Summary of CPR performance

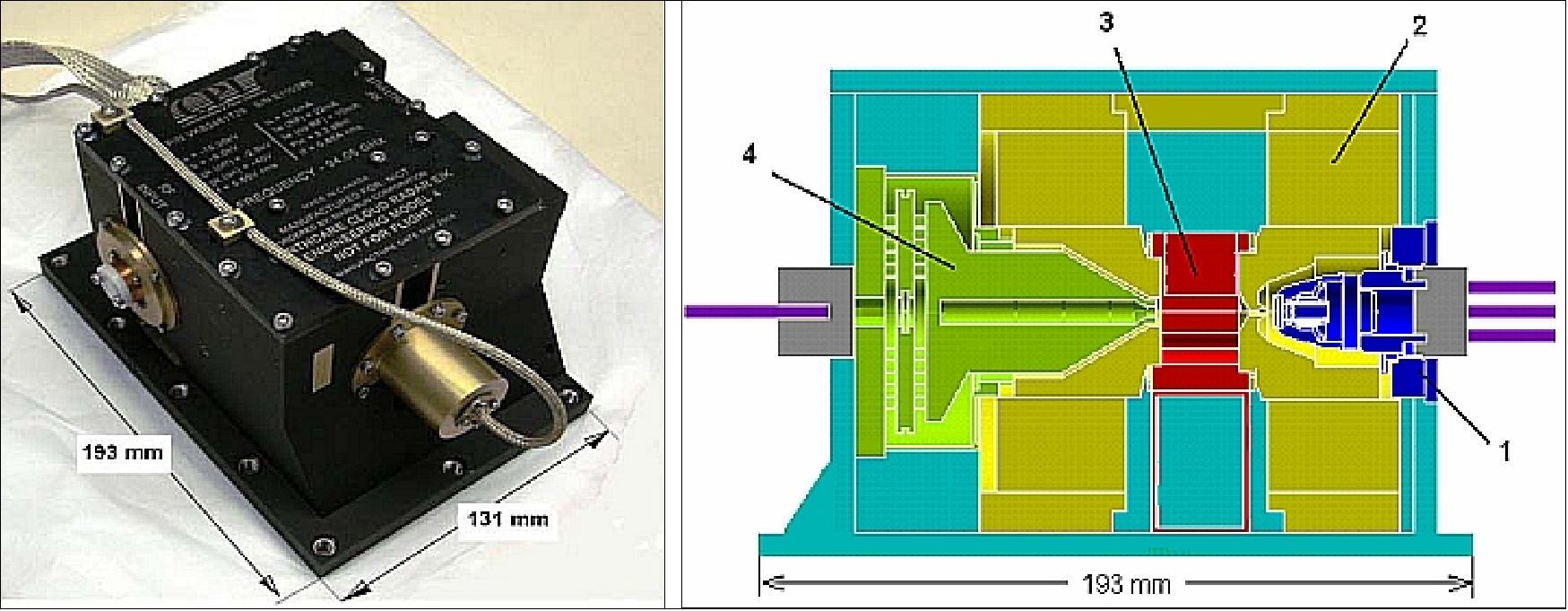
HPT/EPC (High Power Transmitter / Electronic Power Conditioner), and EIK (Extended Interaction Klystron), Ref. 60):
The function of the HPT is to amplify the low-power pulsed Radio Frequency (RF) signal to the 1.5 kW required for CPR transmitter operation. The capability of the CPR to fulfil the mission requirements is strictly related to the performance of the HPT and in particular to the phase and gain stability of the RF signal under all operating conditions. Optimal HPT performance is obtained through a very careful definition of the electrical interfaces between the EPC and the EIK.
In fact, the HPT phase and gain performance, during pulsed operation, depends on both the EIK pushing factors and the stability of EPC output voltages.
The EPC is able to provide very high voltages (up to 20 kV) with very low output impedance and, as a consequence, very low voltage transients during the RF pulse transmission.
The EIK (Extended Interaction Klystron) is a multi-cavity vacuum electronic amplifier, which provides enhanced power, bandwidth and efficiency at millimeter and sub-millimeter frequencies. Figure 41 provides a cross-sectional view of the EIK instrument. Electrons are emitted from the thermionic dispenser cathode, and a high convergence electron gun 1) accelerates and focuses the cylindrical electron beam through an aperture in the anode. Beyond this anode linear beam, confined by the field of permanent magnets 2), passes through a beam tunnel in the center of a series of cavities 3).
Each cavity represents a short piece of resonant SWS (Slow Wave Structure) based on a ladder geometry. The number of SWS periods is selected to satisfy the conditions of RF stability and efficient beam modulation. The microwave energy generated in the output cavity is coupled to the waveguide. The spent electron beam then leaves the circuit and is recovered in a depressed collector (4).
CPI Canada developed and space-qualified the EIK instrument already on NASA's CloudSat mission (launch April 28, 2006). The EIK specification is similar to CloudSat except, the EarthCARE mission requires longer operational life, enhanced duty cycle and improved structural performance to survive more stringent launch and operation environments. EIK on EarthCARE has an output power of 1.8 kW (BOL) and 1.5 kW (EOL), an operational lifetime of 35,000 hours, and a mass of 6.55 kg.
The EPC used for the EarthCARE HPT has been developed by SELEX Galileo (Italy), formerly Galileo Avionica, Officine Galileo and FIAR.
Parameter | Performance requirement | Measured performance |
Pout peak | 1550 - 2200 W | 2050 W |
Input power | +3 to +13 dBm | +7.5 dBm |
Pout variation inside pulse | ≤ 0.5 dBpp | 0.3 dBpp |
Phase variation inside pulse | ≤ 14º pp | 7º pp |
HPT efficiency | ≥ 17% | 29% |
Overdrive | 3 dBm above IPS | Compliant |
Instrument mass | 14 kg | 11.9 kg |
Table 8: Summary of HPT performance

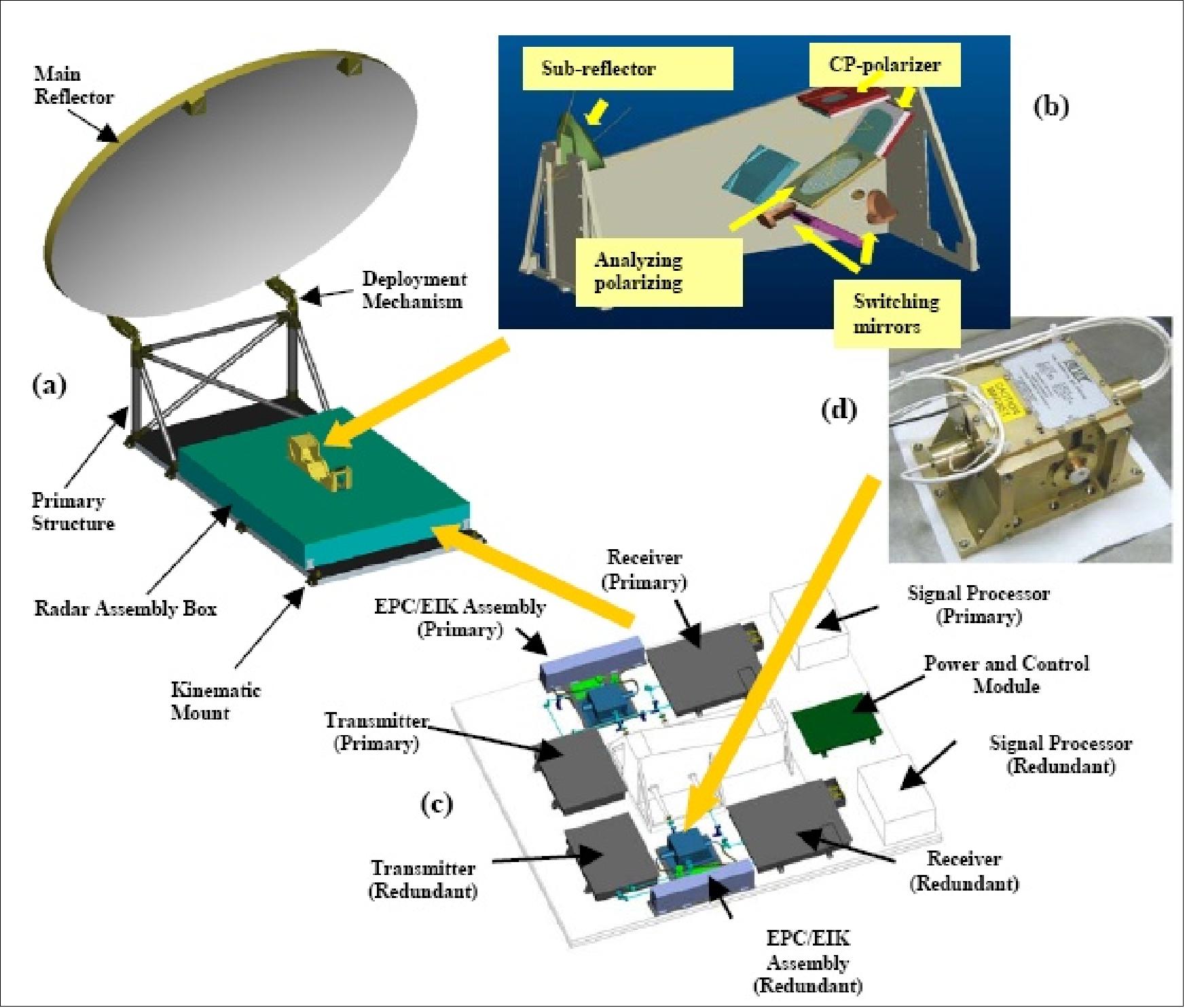
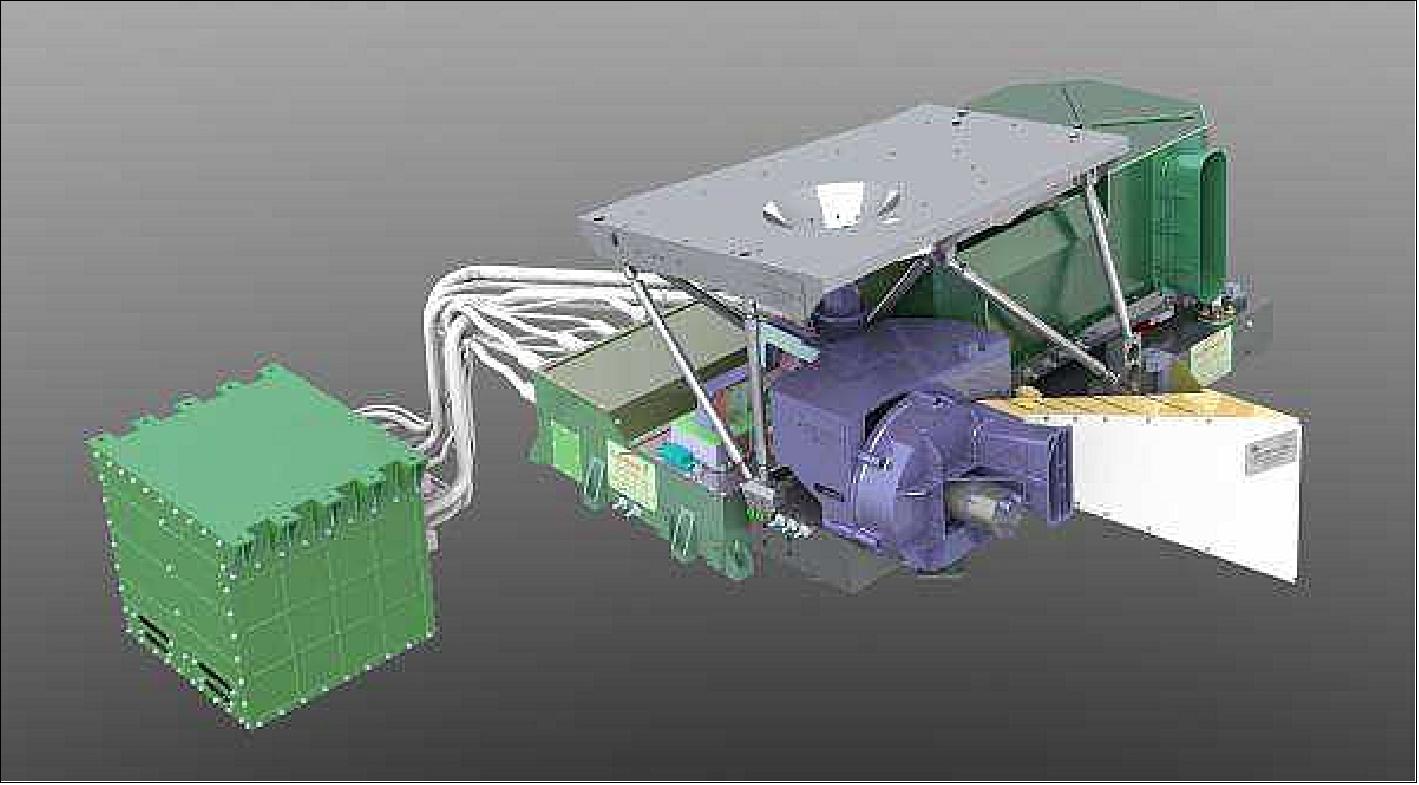
Figure 43 provides illustrations of various CPR components/aspects:
• a) Overall view of the deployed CPR instrument
• b) Quasi-optical feeder consisting of grids and mirrors
• c) Instrument modules within the radar assembly box
• d) High power amplifier EIK (Extended Interaction Klystron)
CPR Calibration Approach
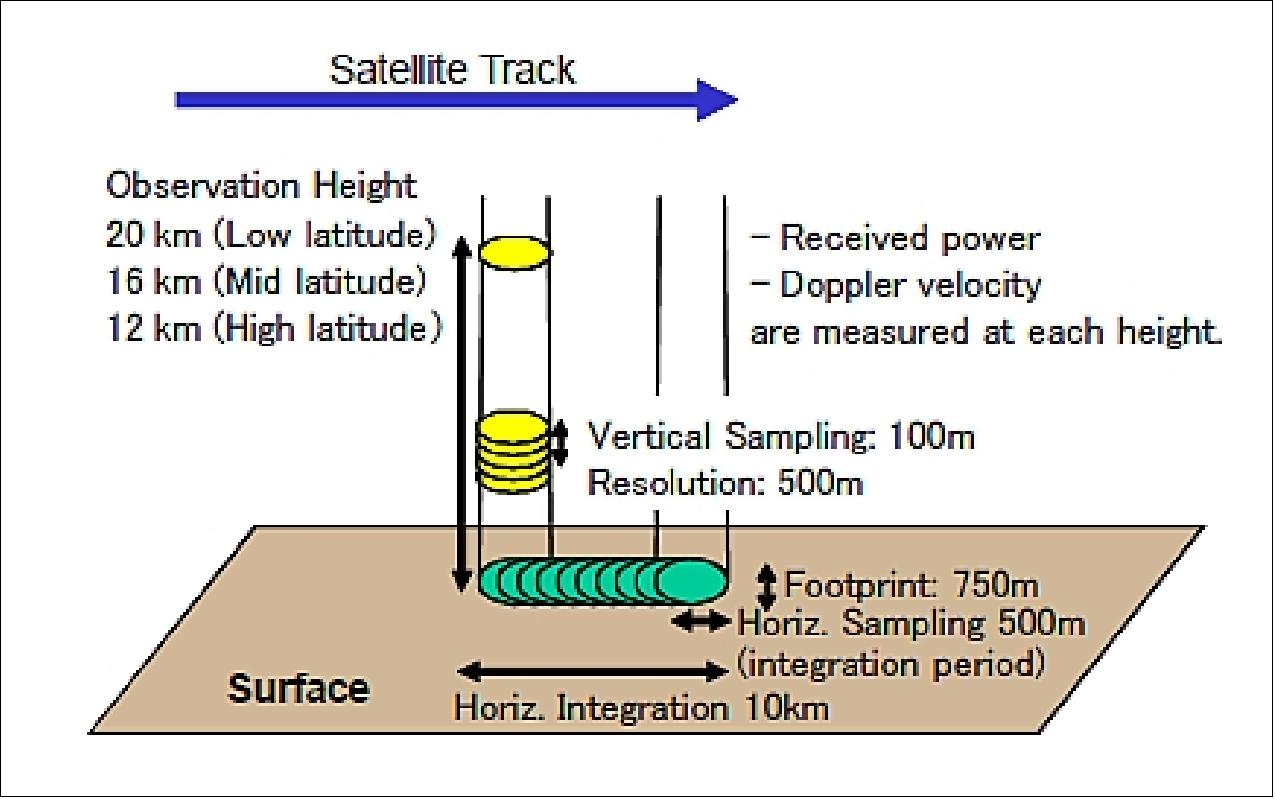
CPR is a millimeter-wave radar and has a large antenna reflector in order to achieve much higher sensitivity to cloud particles than general meteorological weather radar, so it can detect most of the radiatively important clouds in the global region. CPR onboard EarthCARE is expected to bring new important information on various clouds on Earth.
The observation concept of EarthCARE CPR is shown in Figure 44. The radar frequency is the same as that of the CloudSat mission CPR (94GHz); however, the radar sensitivity of EarthCARE CPR is much better because of the lower orbit and the larger antenna size. The minimum radar reflectivity of the EarthCARE CPR is -35 dBZ at the top of the atmosphere (20 km) on the condition of 10 km horizontal integration. The observation range of Doppler velocity is ±10m/s, and the accuracy of 1 m/s for cloud echoes of more than -19 dBZ when they are integrated over a horizontal distance of 10 km. 68)
The unique feature of EarthCARE CPR is vertical Doppler velocity measurement capability. The measurement of the vertical Doppler velocity is a very attractive function from the scientific point of view because vertical motions of cloud particles are related to cloud microphysics and dynamics. However, from an engineering point of view, the Doppler measurement from a satellite is a rather challenging technology. The pulse pair method will be used for the Doppler measurement, which is the detection of the phase difference between echo signals from two consecutive radar pulses. High coherency and high SNR are needed to obtain an accurate Doppler measurement.
With a spacecraft speed of ~ 7.2 km/s, the beam tilting angle from the nadir should be kept very small. Accurate antenna pointing and pointing knowledge are key requirements to obtain an accurate Doppler measurement. The Doppler bias error reduction is considered by using the surface echo Doppler information. Non-uniform beam filling of the beam contributes also to the Doppler measurements error because the forward or backward bias inside the beam will cause a Doppler bias.
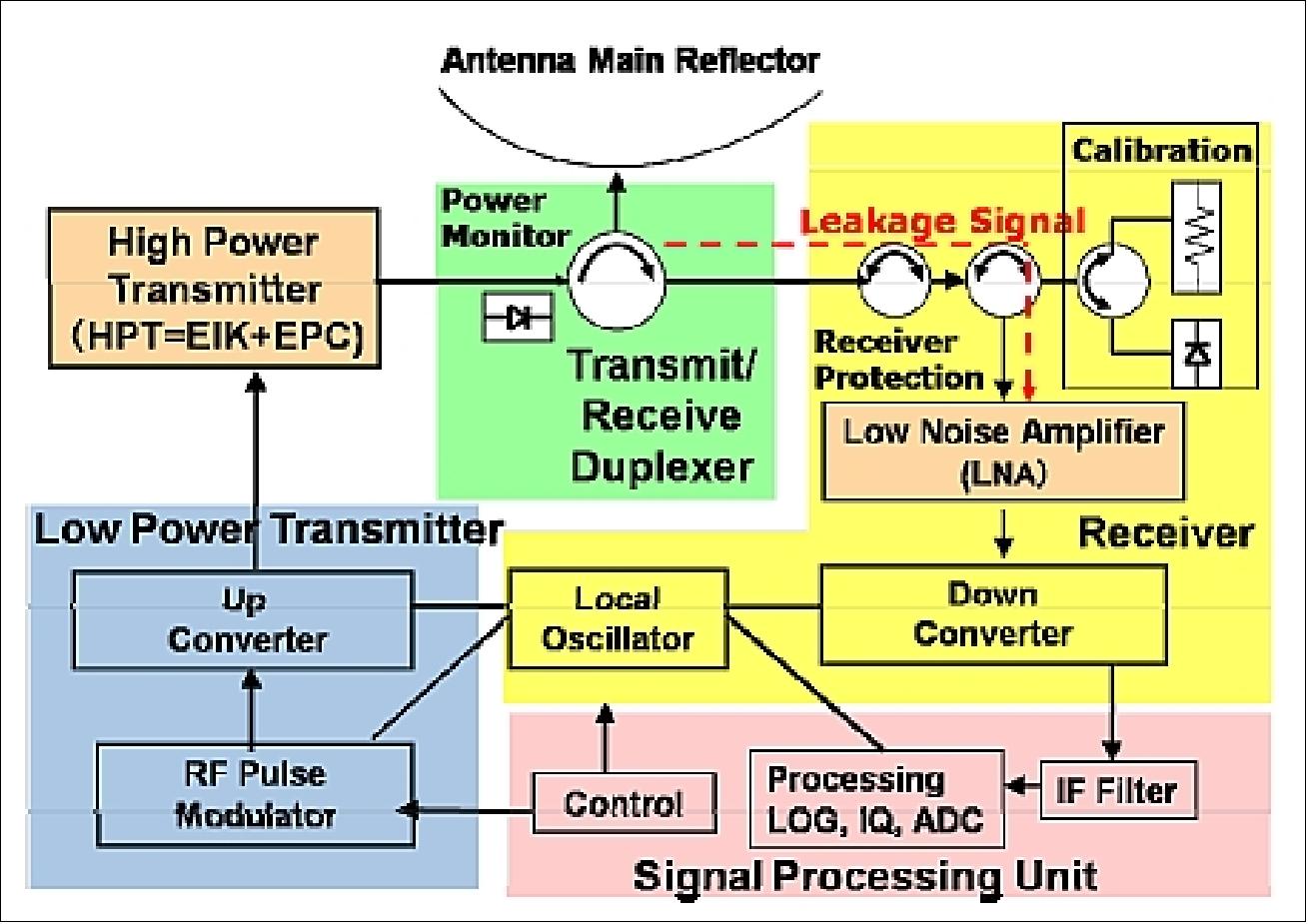
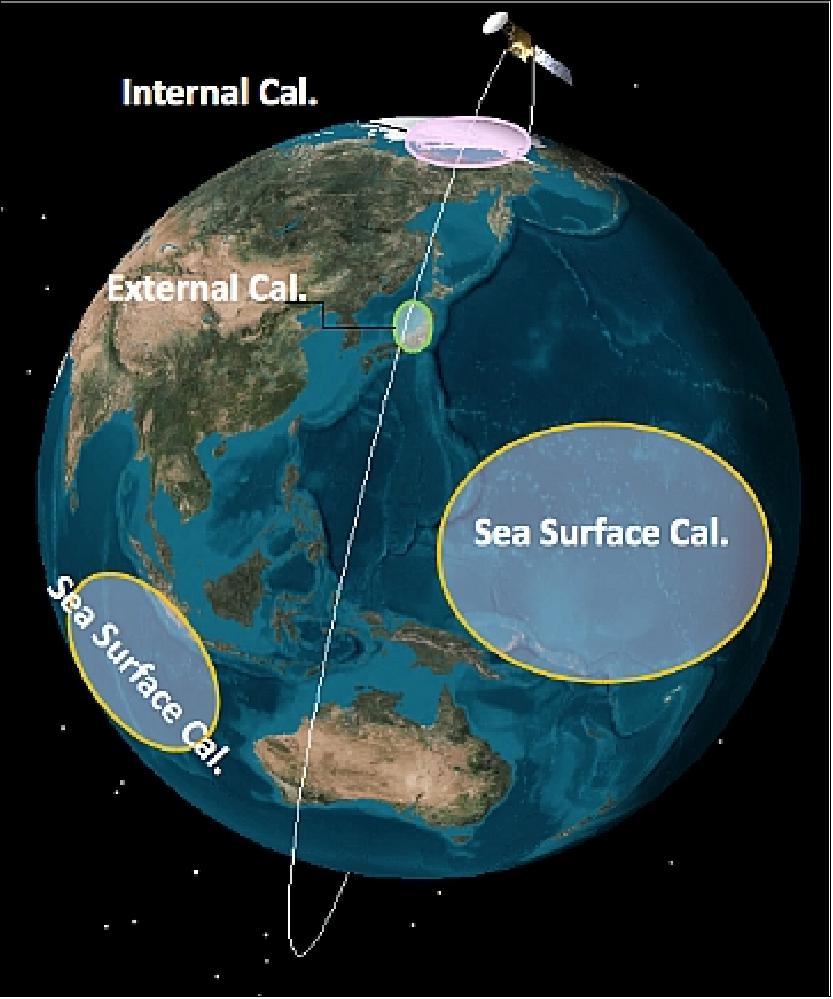
Calibration/validation: To maintain and ensure CPR performance, several types of calibration data will be obtained by CPR as outlined in Table 9. The CPR is designed to obtain transmit power by the power monitor diode in the QOF (Quasi Optical Feeder). The receiver performance (e.g. NF) is obtained by referring to the noise sources’ signal. The linearity and bias of the logarithm amplifier (Log Amp) are obtained during the internal calibration mode by using the internal IF signal source and the step attenuator and the data acquisition with terminated logarithm amplifier.
Calibration method | Calibration in operational mode | Internal calibration | Sea surface calibration | External (ARC) calibration | Other methods | |
Category | Item | |||||
Calibration for sensitivity | Transmitter | Transmitting power (use of power monitor) |
|
| Transmitting power |
|
Receiver | Linearity/noise level or bias/NF (use of noise sources) |
|
| Receiver loss |
| |
Signal processing | Log Amp bias (log Amp termination mode) | Log AMP linearity |
|
|
| |
Antenna pattern |
|
| Cross-track direction | Along-/Cross-track direction |
| |
Overall system |
|
| Bias estimation | Bias estimation | Bias estimation (use of surface return) | |
Calibration for Doppler velocity | Overall system | Zero Doppler (use of Tx leak signal) |
|
| Pulse pair performance | Zero Doppler (use of surface return) |
Signal processing |
| IQ demodulator/AD converter linearity |
|
|
| |
Antenna beam pointing |
|
| Cross-track direction | Along-/Cross-track direction | Along-/Cross-track direction (use of DEM coast line) | |
Table 9: Calibration items and procedure for CPR
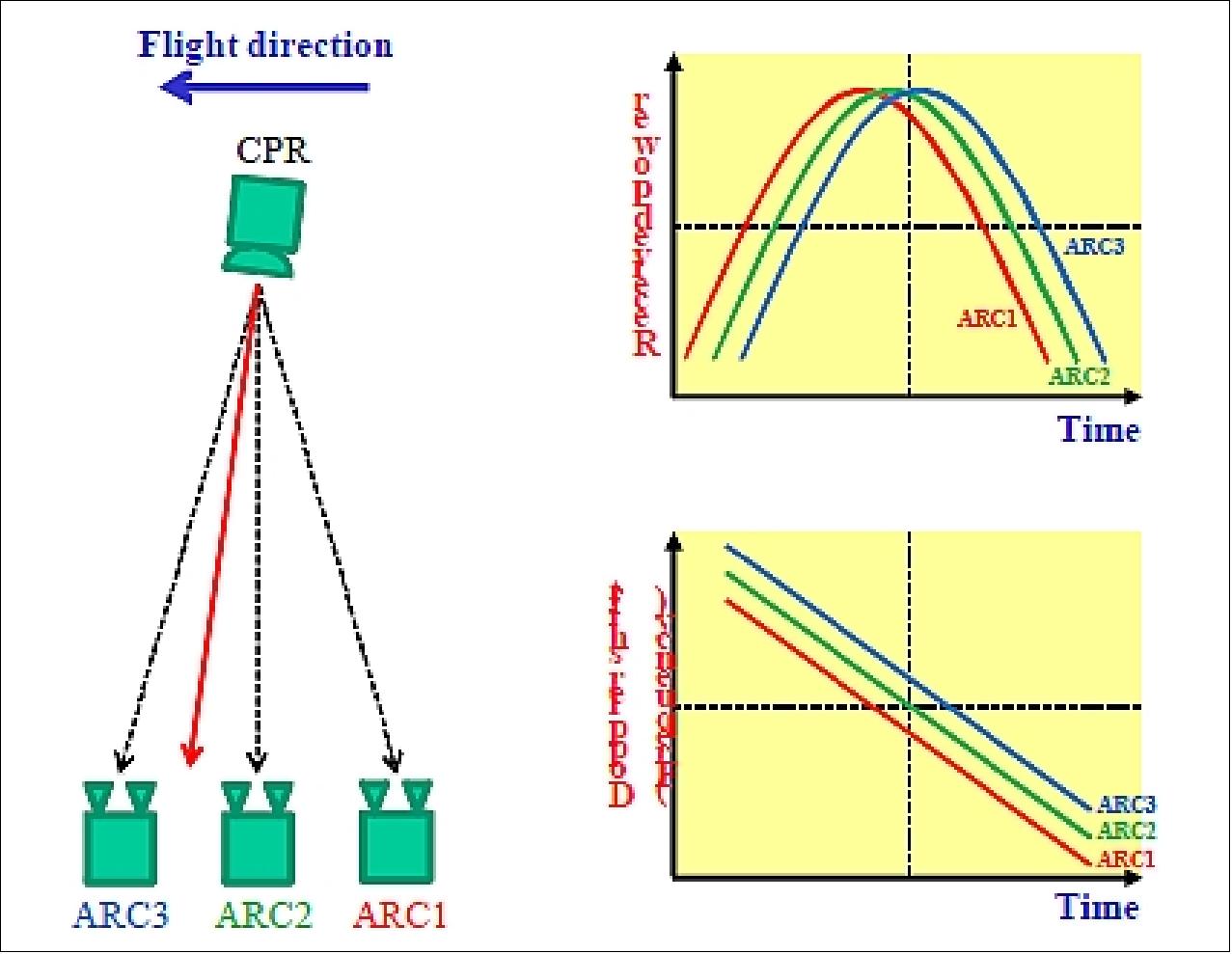
The overall performance of CPR is checked by the ARC (Active Radar Calibrator) equipped on the ground (CPR in External Calibration mode). The ARC is used to check the CPR’s transmitter performance (ARC in receiver mode) and the receiver performance (ARC in transmitter mode) as well as the overall performance (ARC in transponder mode with delay to avoid contamination with ground echo). In addition, ARC will have the capability to change the transmit frequency for the evaluation of the Doppler processing. It is noted that data obtained during the external calibration will also provide antenna pattern information.
The EarthCARE satellite will perform a roll maneuver regularly (e.g. once a month) for the sea surface calibration (CPR in Sea Surface Calibration mode). Since the normalized radar cross-section of the sea surface echo (σ0) has a clear incident angle dependency and its shape is dependent on the sea surface wind, σ0 for various incident angles is useful to evaluate the CPR performance. Other natural targets such as σ0 over a desert (a desert has an advantage due to a smaller amount of water vapour and virtually no clouds) will also be helpful to evaluate the CPR performance.
External calibration methods: There are some external calibration methods using a calibration target whose reflectivity is already known. One method is using a point target such as a corner reflector, or an ARC (Active Radar Calibrator). Another method is using naturally distributed two-dimensional targets such as the sea surface, a desert, a rain forest, a snow field, and so on.
The method of a point target is illustrated. The method of using a corner reflector is usually easy, but it sometimes fails because the reflectivity of the corner reflector is not greater than the reflectivity of the surface. In the case of CPR, the surface return is predicted as too large. Therefore, the use of the ARC is considered.
The ARC has 3 functions, which are:
1) receiver mode,
2) transmitter mode
3) transponder mode.
The return signal from ARC can be delayed to distinguish from surface return.
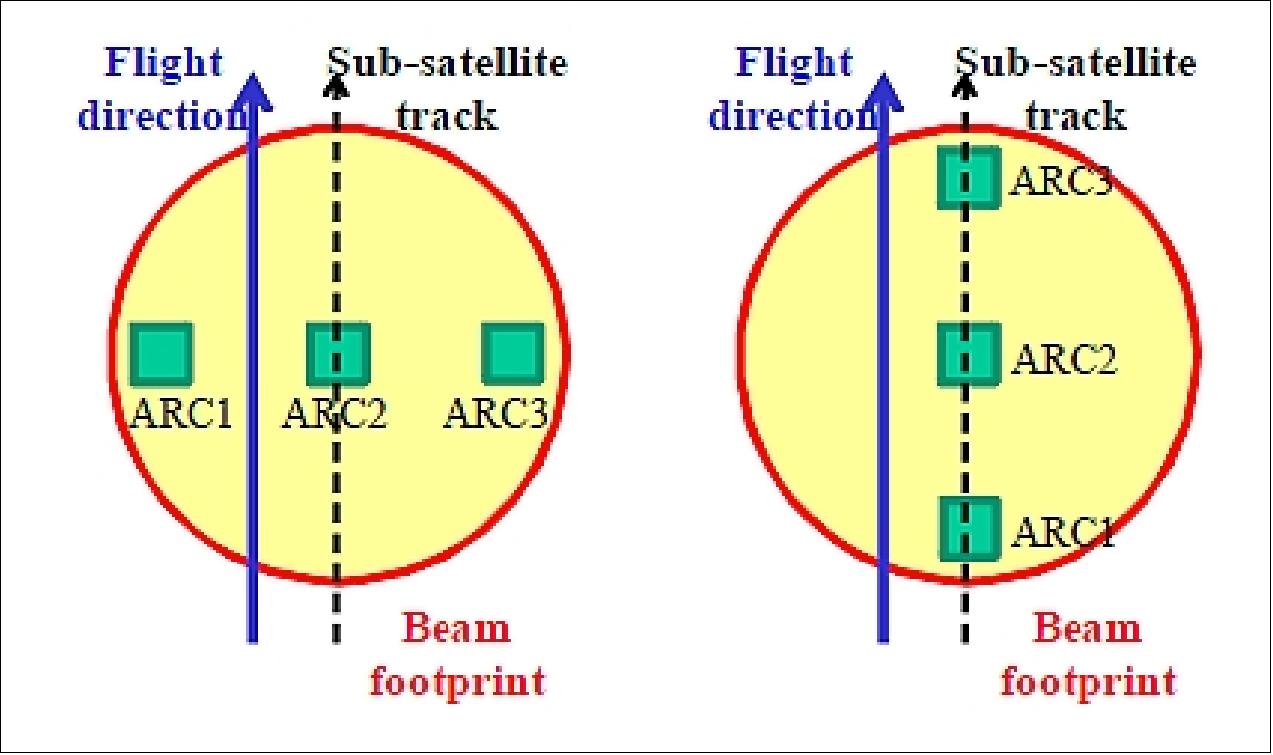
In the case of TRMM/PR, external calibration using ARC is performed regularly. For EarthCARE/CPR, some difficulties of external calibration using ARC are recognized because the antenna footprint is too small about 750 m with no beam steering capability. This means, that ARC must be located on the exact position along with the predicted sub-satellite track.
To demonstrate the validity of the external calibration mode with ARC, JAXA plans experiments by using the existing CloudSat CPR after completion of the ARC design and manufacturing.
Multiple ARC locations: Locating ARC includes two elements. One element is an experimental area which can be changed since the ARC location is affected by the sub-satellite track prediction day by day. The satellite orbit maintenance affects the orbital element and prediction calculation is more accurate for short-term prediction than that long-term prediction. Therefore, the project needs a wide experimental area which is capable of ARC location to be adjusted. The other element is a technical skill to locate ARC precisely; however, a handy GPS receiver can be useful for this purpose.
Data acquisition to start at the exact timing consists of two elements. One is the accuracy of overpass timing prediction. The duration of the overpass is less than 1 second. The other is to start data acquisition at adequate timing. If the data logger for a long period is provided, then adequate start timing can be realized.
The reconstruction of the antenna pattern depends on the sensitivity of ARC and the precise time interval of the data logger. If the sensitivity is not enough, only the main lobe of the antenna pattern is measured and the sidelobe information may not be obtained. If the time interval is long enough, then a reconstruction of the antenna pattern will be accomplished.
Beam pointing measurements: For the operational modes of CPR, several calibration modes will be implemented in order to verify and assure the performance of CPR.
In the fall of 2010, CPR is in the EM (Engineering Model) phase. The large main reflector and structure are already built and under environmental testing. All electrical and RF components are independently under manufacturing and soon to be tested.
In the spring of 2011, the CPR qualification tests were performed on an EM (Engineering Model) in JAXA’s environmental test facility for the completion of the qualification testing. The CPR EM environmental testing meant not only the CPR qualification but also the flex-core technology qualification of the newly developed CFRP antenna structure, as well as the EIK qualification. The remaining environmental testing will be finished within 2011; hence, the CPR critical design review is now planned for early 2012. 69) 70)
MSI (Multi-Spectral Imager)
MSI is a passive instrument of ESA designed and developed by SSTL, Surrey, UK and TNO, Delft, The Netherlands (contractors to EADS Astrium). The objective is to provide complimentary data (context) in support of the other EarthCARE instruments for the determination of cloud type, texture, temperature and other microphysical parameters such as cloud phase. MSI provides imagery in the visible (reflectance) and infrared regions (emitted bands) in support of active instruments (information on the horizontal structure of cloud and aerosol fields). MSI is also being used for the calibration of BBR. The instrument operates in a pushbroom mode with two bands in the VNIR (Visible Near Infrared), and two bands in the SWIR (Short Wave Infrared). Three bands are in the TIR (Thermal Infrared) part of the spectrum. The instrument is nadir-pointing with a spatial resolution of 500 m and a swath width of 150 km. 71) 72) 73) 74) 75) 76) 77) 78)
The MSI instrument is of MIBS (Microbolometer Spectrometer) design heritage, a breadboard hyperspectral imager with uncooled bolometer detectors, developed by TNO Science and Industry, Delft, The Netherlands. MIBS is able to provide co-registered measurements in the 7 to 14 µm wavelength region yielding acceptable NEDT performance on the basis of currently available standard detectors.
The MSI instruments consist of two parts:
• VNS (VNIR-SWIR) system, radiometrically calibrated using a sun-illuminated diffuser
• TIR (Thermal Infrared) calibrated system using cold space and an internal black-body.
The VNS system performs pushbroom imaging, using linear array detectors (silicon and InGaAs) and 4 separate lenses. The TIR system uses a microbolometer array detector in a TDI (Time Delay and Integration) observation mode.
Band | Spectral range (µm) | SNR/NEDT | Comments | Detectors |
1 | 0.660-0.680 | 500 @ ρ = 1.0 | VIS | Si CCD |
2 | 0.855-0.875 | 500 @ ρ = 1.0 | VNIR | |
3 | 1.625-1.675 | 250 @ ρ = 1.0 | SWIR 1 | cooled InGaAs array |
4 | 2.160-2.260 | 250 @ ρ = 1.0 | SWIR 2 | |
5 | 8.35-9.25 | 0.25 K @ T = 293 K | TIR 1 | Uncooled microbolometers |
6 | 10.35-11.25 | 0.25 K @ T = 293 K | TIR 2 | |
7 | 11.55-12.45 | 0.25 K @ T = 293 K | TIR 3 |
Table 10: Spectral bands of MSI
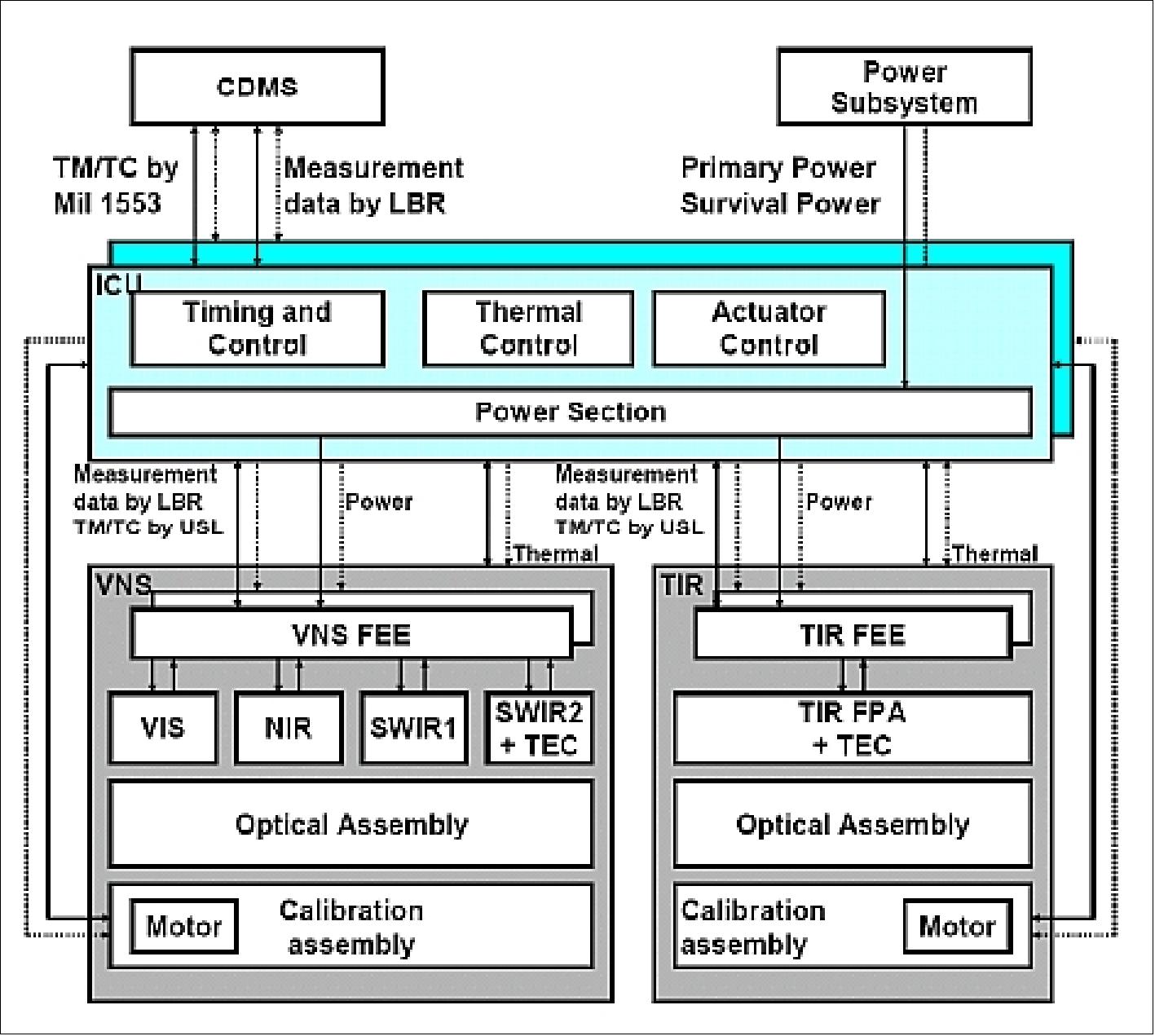
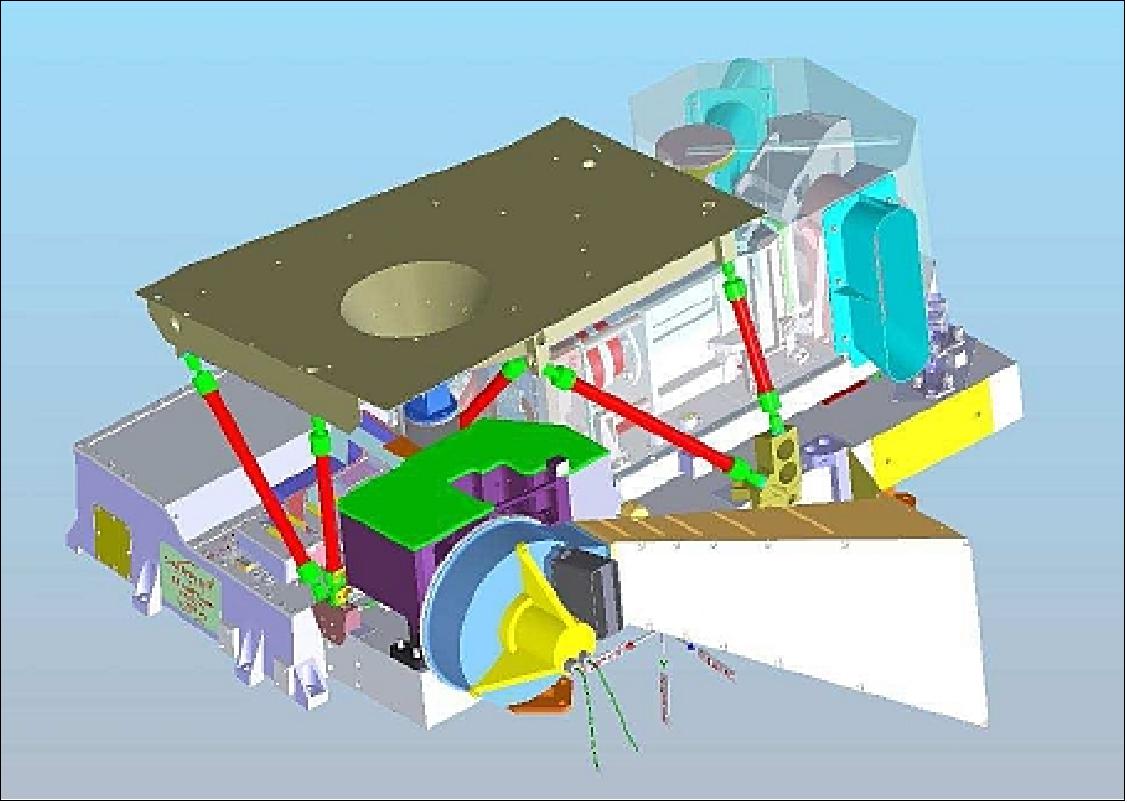
The MSI system comprises an OBM (Optical Bench Module) mounted on an external spacecraft panel, connected via a complex harnessing arrangement to the ICU (Instrument Control Unit) within the interior of the satellite. The OBM is a logical unit containing the TIR and the VNS mounted onto a single OB (Optical Bench) for accurate through-life alignment of the two instruments. It also contains the instrument FEE (Front End Electronics), which provides the drive and signal conditioning to the detectors in the two instruments. A sketch of the OBM can be seen in Figure 51.
The MSI instrument features three main units:
• The VNS (VNIR-SWIR) subsystem provides data from four solar spectral channels
• The TIR subsystem
• The ICU (Instrument Control Unit) that drives both the VNS and the TIR subsystems.
The MSI instrument has a mass of 56 kg (OBM = 44.5 kg, ICU = 10 kg) and provides a data rate of 772/386 kbit/s (day/night).
The VNS and TIR units are mounted on the common OBM (Optical Bench Module) that interfaces with the EarthCARE platform. The OBM is located on the exterior, anti-sun side of the EarthCARE satellite platform. The ICU is mounted on the interior of the platform, on the same anti-sun panel.
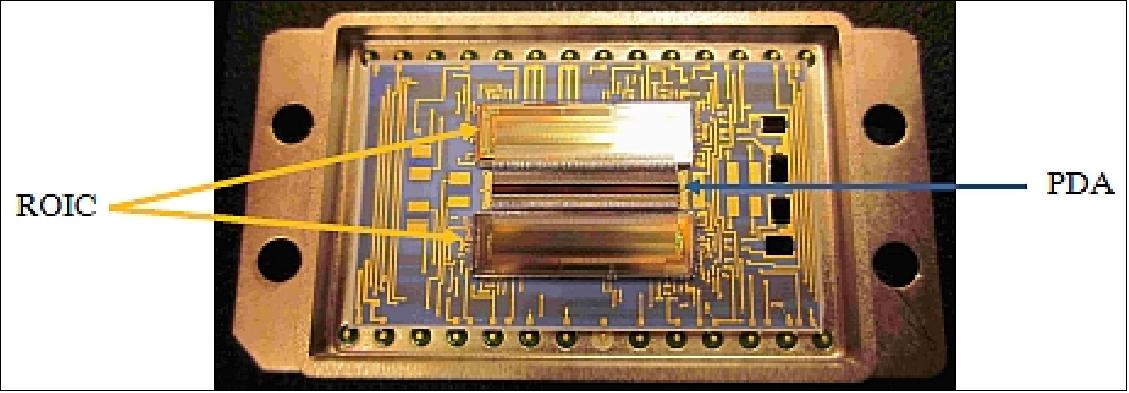
FPA (Focal Plane Assembly) and ROIC (Readout Integrated Circuit) architecture for the MSI mission: All detectors are mounted in a metal can package. The PDA (Photodiode Array) is placed in the middle of the package on a substrate. The PDA contains 512 pixels on a pitch of 25 µm, which are wire bonded to 2 CMOS ROIC’s with 256 inputs each on a pitch of 50 µm. For the interconnection of the PDA to the ROIC’s a double wire bonding layer at a pitch of 100 µm is used. The 2 ROICs are also placed on the alumina substrate together with 4 screen printed resistors in a rad-hard process. 79)
The analogue signal path consists of a CTIA (Charge sensitive TransImpedance Amplifier) with 4 different charge-to-voltage conversion settings. The OTA (Operational Transconductance Amplifier) is designed as a truly differential amplifier; this allows the integration with both p-on-n and n-on-p detectors. In this case, all photodiodes (Silicon as well as InGaAs) have p-type junctions in an n-type substrate and hence, the Vref needs to be placed at a high level. At the end of the integration cycle, the information is transferred to a Sample and Hold stage before the sequential readout of the acquired and stored information starts.
The device can be operated in an ITR (Integrate- Than-Read) or IWR (Integrated-While-Read) mode; in ITR mode, the signal integration and the read-out cycle are separated in time, whereas in IWR mode, the device starts already a new integration cycle while the information of the previous line is read out.
The ICU (Instrument Control Unit) controls the instrument functionality, powers the FEE (Front End Electronics) and provides thermal control for the VNS and TIR optical benches. The digitized image data from the FEEs are processed and formatted with time tag and source information and forwarded to the spacecraft’s MMFU (Mass Memory and Formatter Unit) via the S/C MDI (Measurement Data Interface). The ICU also interfaces to the spacecraft’s OBC (On Board Computer) via the MIL 1553 bus for command and control.
The OBM (Optical Bench Module), shown in Figure 51, accommodates the VNS and TIR optical subsystems, together with their fully redundant FEE. All items are mounted on a common base plate. It will feature an alignment capability to enable co-alignment of the VNS and TIR FOVs, and overall alignment of the MSI FOV to the Spacecraft. The OBM is passively cooled and will be attached to the spacecraft by means of an isostatic flexure mount system to accommodate the differential thermal expansions between the OBM and the spacecraft.
Instrument overview (Figures 51 and 56):
Together with the TIR unit, the VNS instrument is mounted onto the MSI bench.
• The Optical Unit contains the imaging optics and the detectors.
• The SWIR-2 radiator cools down the SWIR-2 detector via a cold finger and a flex link.
• The calibration unit selects the optical input for the instrument.
• The sun calibration baffle provides a view of the sun while blocking earth radiation and spacecraft reflections.
VNS Camera
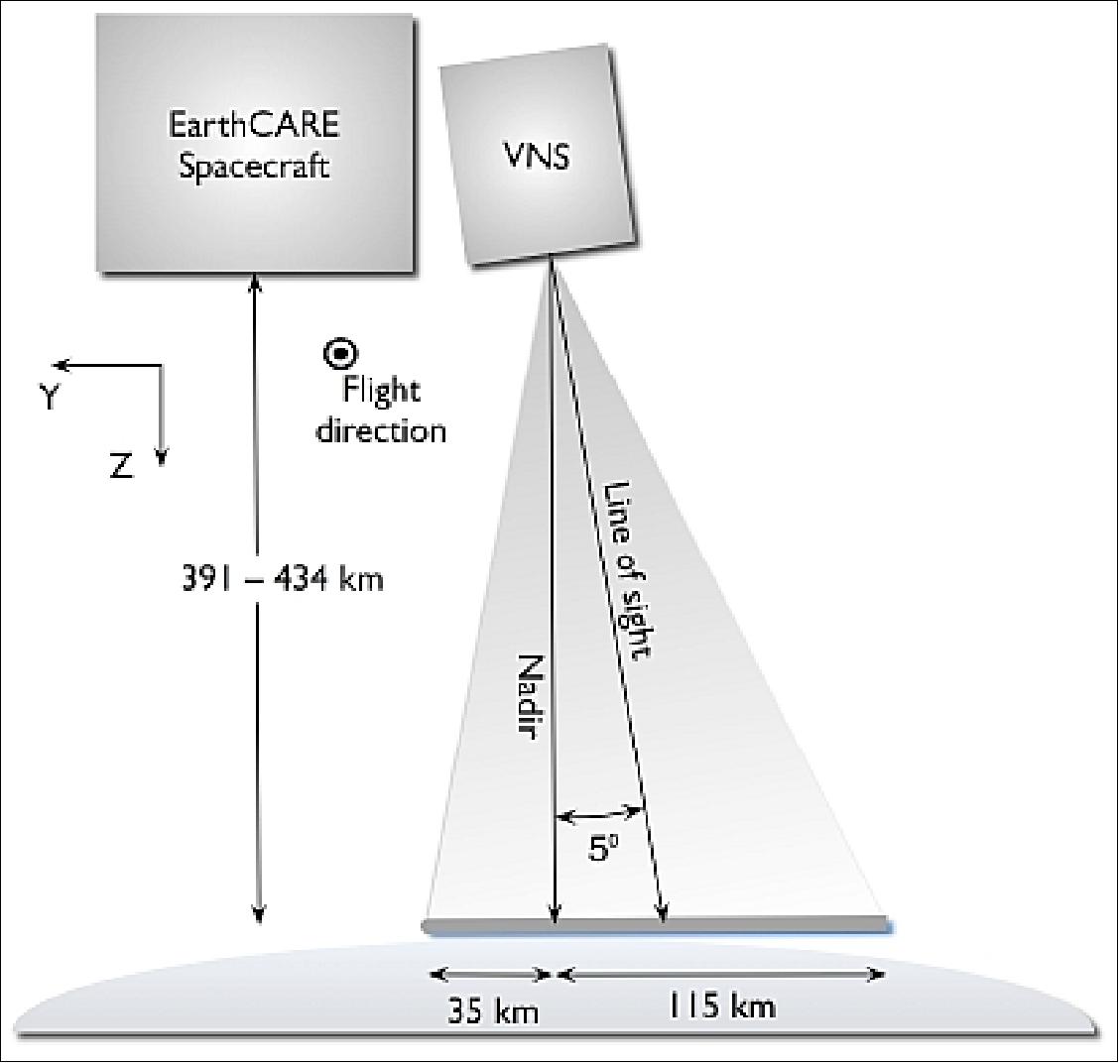
The VNS is a nadir viewing pushbroom imager instrument with a swath width of 150 km. VNS is located at the –Y side of the spacecraft, which is permanently shielded from solar flux. The instrument line of sight is tilted 5º with respect to the nadir around the flight direction in order to reduce sun glint from the Earth’s surface. 80)
In the swath direction, the spatial sampling distance is 500 m, to be met for a range of orbital heights. The spatial sampling distance has to be for the maximum orbital height, while the 150 km swath width has to be met for the lowest orbital height. Due to this, the maximum number of active pixels is 360. The EarthCARE spacecraft ground speed combined with the 70 ms dwell period lead to a 500 m sampling distance in flight direction as well.
The VNS performance requirements and constraints are:
• The spectral response per channel is constrained within a predefined parametrized shape. Out-of-band rejection is limited to 3%.
• Along-track and cross-track MTF are both specified at 0.25. This instrument level MTF requirement is budgeted in allocations for detector level MTF, channel optics MTF and allowable tolerances in optics manufacturing.
• Polarization is required to be below 1%. Based on an instrument-level analysis of polarization sensitivity, this is divided into contributions from the optics and detectors and specified accordingly.
• Stray light is specified in terms of measured crosstalk between illuminated and dark parts of a scene. Stray light is minimized by the application of absorbing coatings and by slits in front of the detector arrays.
• Radiometric accuracy requirements impose strict constraints on temperature stability and on-ground calibration of the instrument.
• Instrument level channel co-registration and pointing requirements are budgeted in lower level requirements on alignment accuracy and stability of the optical components.
• The envelope available to VNS and the accommodation on the MSI instrument have determined the VNS configuration is already at an early stage of development.
VNS design: The VNS consist of the following three assemblies, which are directly mounted on the MSI Optical Bench:
• VNS Camera with integrated VNS calibration mechanism
• VNS SWIR-2 radiator
• VNS sun calibration baffle.
The four VNIR and SWIR channels are spectrally separated using dichroic beam splitters and a folding mirror. The SWIR-2 channel has a dedicated aperture. The two apertures are located close to each other to minimize the size of the calibration mechanism.
The VNS has two separate apertures (Figure 53), one 4.85 mm diameter aperture for the VIS, NIR and SWIR-1 channels, and a second 10.47 mm diameter aperture for the SWIR-2 channel. The larger aperture for the SWIR-2 channel compensates for the weaker light levels coming from the Earth. The light collected through the VIS/NIR/SWIR1 aperture is separated into different spectral regions using a set of dichroic.
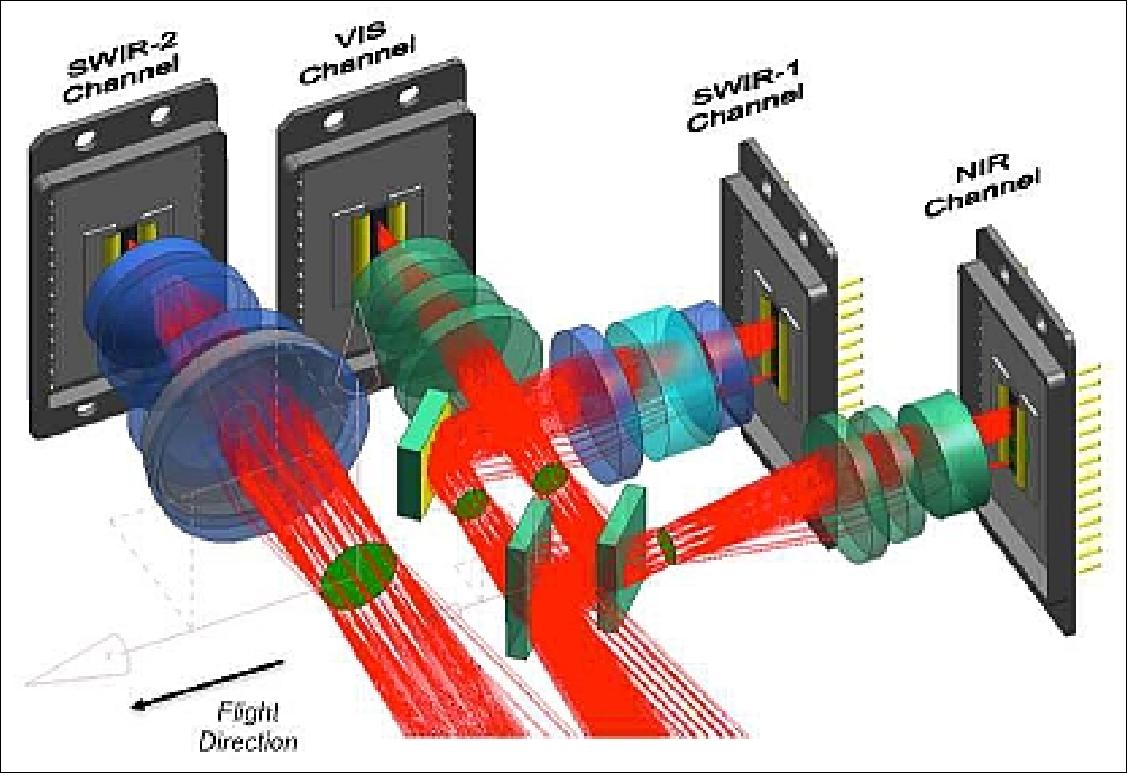
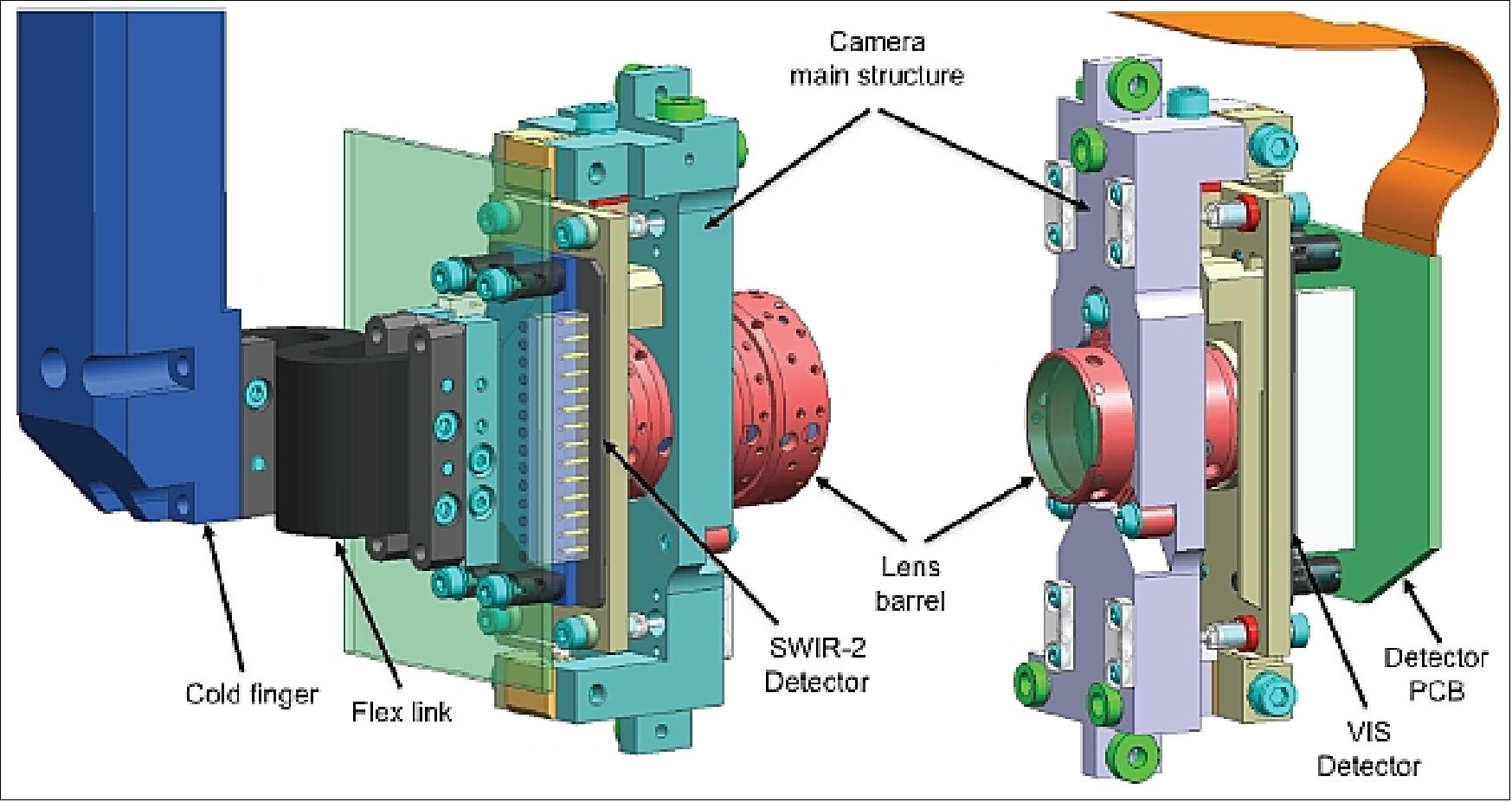
Since the VNS optics are relatively small, a separate lens is assigned to each of the four channels, and refractive optics can be used since the four channels are each relatively narrow. A separate filter is mounted with each lens to define the required spectral band. The complex detailed-design trade-off favours an arrangement using two separate apertures as indicated in Figure 55: one assigned only to the long-wave SWIR band, while the other aperture serves three channels via 2 dichroic splitters. The diagram includes a schematic representation of the calibration diffuser, which takes the form of a reflecting prism with ground surfaces.
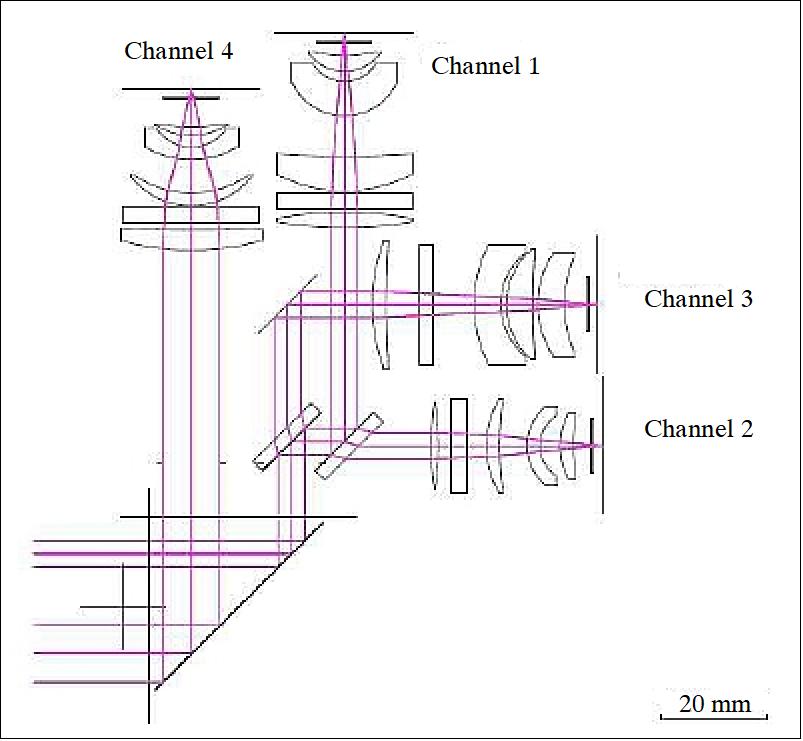
VNS detectors: The ground swath is imaged on linear detector arrays with a pixel size of 25 µm square. InGaAs detectors are applied for the two SWIR bands, while silicon detectors are applied for the VIS and NIR bands. The SWIR detectors are a modified version of existing 512-element InGaAs arrays from Xenics of Leuven, Belgium. In the standard version, the detectors are hermetically sealed packages with Sapphire detector windows. To improve stray light performance the detector windows and the package lid had to be removed. The open packages are mounted on a plate, which includes a narrow slit in front of the detector array for suppression of stray light and ghosts.
The in-orbit operating temperature of the VIS/NIR and SWIR-1 detectors is 300 K, while the operational temperature of SWIR-2 is 235 K. The reduced SWIR-2 temperature is implemented to achieve the required signal-to-noise levels and radiometric accuracy. In order to reach its operating temperature the SWIR-2 detector is thermally isolated from the VNS camera and thermally coupled to the VNS SWIR-2 radiator using a flex link and cold finger (Figure 54). The thermal isolation of the SWIR-2 detector is achieved by the implementation of titanium flexures in the camera design. The radiator panel, with a surface of 0.175 m2, is designed to reach a temperature well below the target. An active thermal control circuit stabilizes the detector temperature at 235 K.
VNS calibration: Figure 57 shows the construction of the VNS subsystem, including the calibration assembly. The cylindrical housing contains two prism diffusers rotated on a common axis. Rotation of the calibration body selects either an open aperture for normal Earth view, a shutter for protection and dark field, and or either of the two diffusers.
The layout of the calibration mechanism is shown in Figure 58. Two sets of QVDs (Quasi Volume Diffusers) are applied. These grounded quartz prisms provide a uniform illumination of the instrument aperture and are able to fill the entire field of view. They transform the irradiance of the sun to radiance, thereby reducing the flux to avoid saturation. Specific advantages of QVDs are that they offer a very smooth spectrum to the instrument, lack spectral features and their tolerance to contamination. One diffuser set comes into action every orbit, while the other set is active only once a month. This allows for compensation for any ageing effects. Experience past applications of QVDs in space instruments and learn that their degradation is very low anyway.
The diffusers and openings are located on the rotating part inside the calibration mechanism housing (a carousel with access to two openings to the outside of the instrument) that is supported on a pair of ball bearings and is driven by a stepper motor. The calibration mechanism performs a very critical function for the instrument and is tested thoroughly to ensure its dependability in orbit.
Calibration data using diffuser radiance will be recorded when the platform is over a polar region, with sunlight illuminating the trailing face of the platform. One diffuser may be deployed up to once per orbit. The second identical diffuser will be deployed less frequently – a comparison of images from the two diffusers will be used to detect a difference in degradation rates associated with exposure to solar UV radiation.
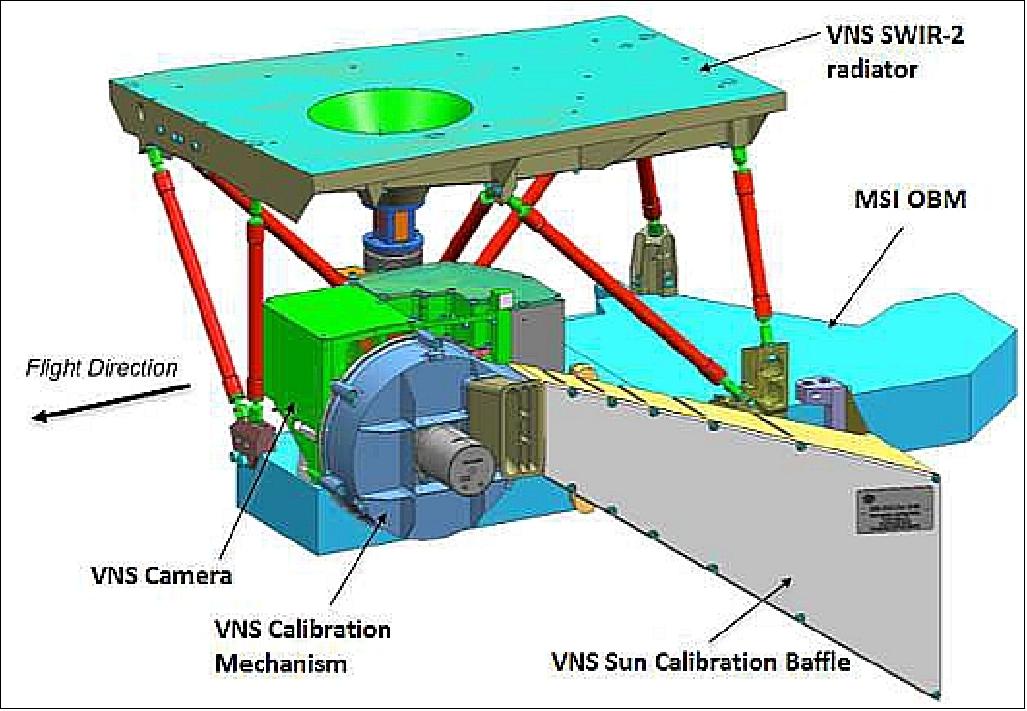
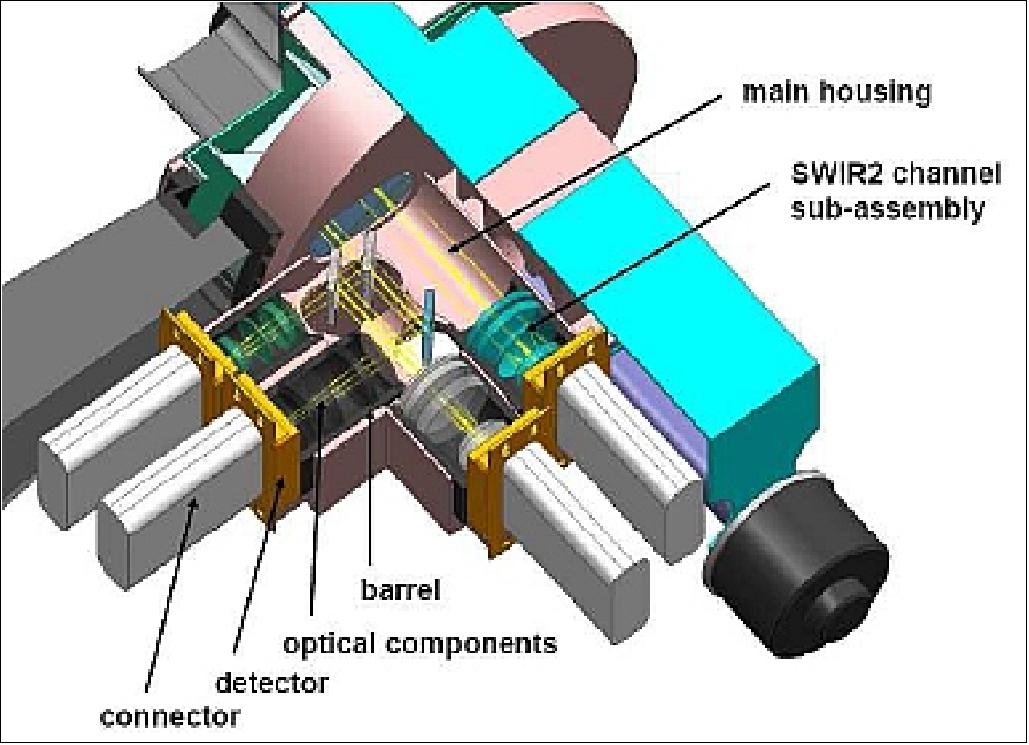
During the in-flight operations, the VNS will be regularly calibrated. Dark measurements will be performed for offset corrections during an eclipse of the orbit; sun calibration will be performed for response calibration during passes over the South Pole region. During the sun calibration, the sunlight will illuminate a pair of QVD (Quasi Volume Diffusers). The QVDs are mounted on a rotating carousel (Figure 58), which is used to switch between dark, sun and earth viewing modes.
A dedicated mechanism, VNS LTM (Life Test Model) has been designed, built and tested. The VNS LTM successfully passed all the tests thereby maintaining the required performance and is therefore considered qualified for the MSI program. 81) 82)
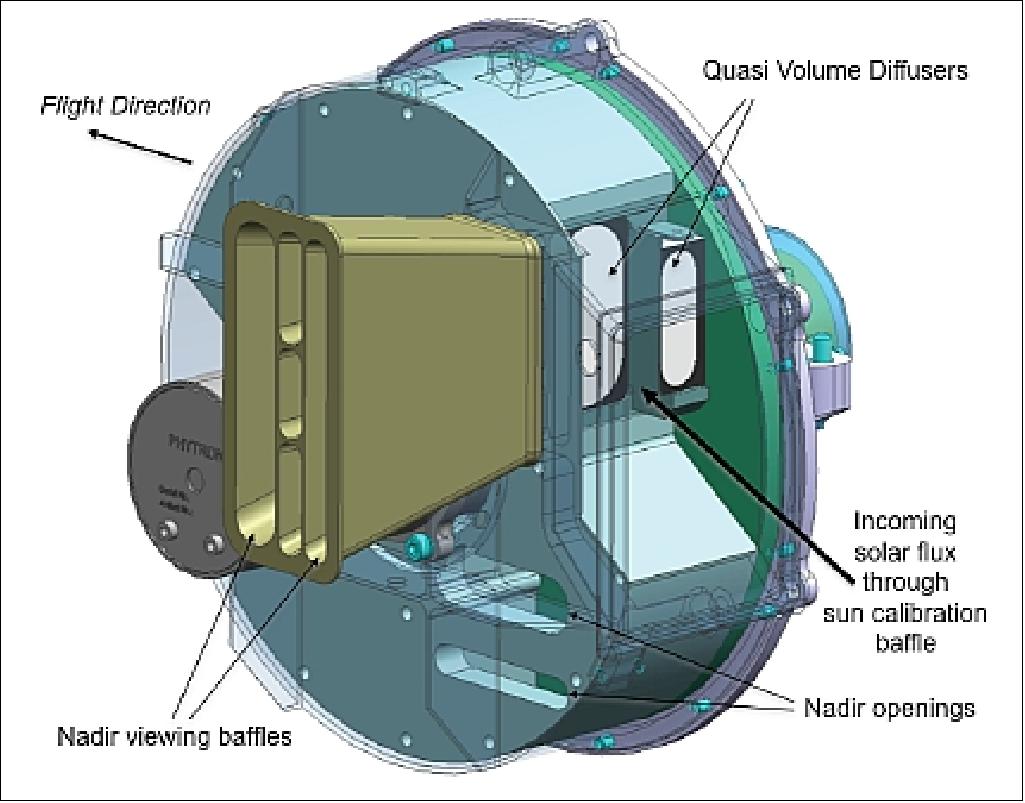
TIROU (TIR Optical Unit)
TIROU will provide co-registered images in three spectral channels. The spectral bands are detailed in Table 10. The other main requirements are the swath width, ground sample distance, MTF and radiometric accuracy (< 1 K absolute accuracy and 0.1 K interchannel relative accuracy). These are coupled with the constraints of a large range for the spacecraft orbit altitude and demanding temperature environment. 83) 84)
The TIR subsystem design is based on the use of microbolometer array detectors within a two-stage imaging system. In the first stage, an image of Earth will be formed at a relatively long focal length by a simple lens system. The beam will be split by two dichroic beam-splitters located near the large primary image, and optical filters in the three separated beams will define the required TIR spectral response functions. The three beams, folded by mirrors onto parallel paths, will then be re-imaged onto the area array with a substantial de-magnification. This is shown in Figures 60 and 61.
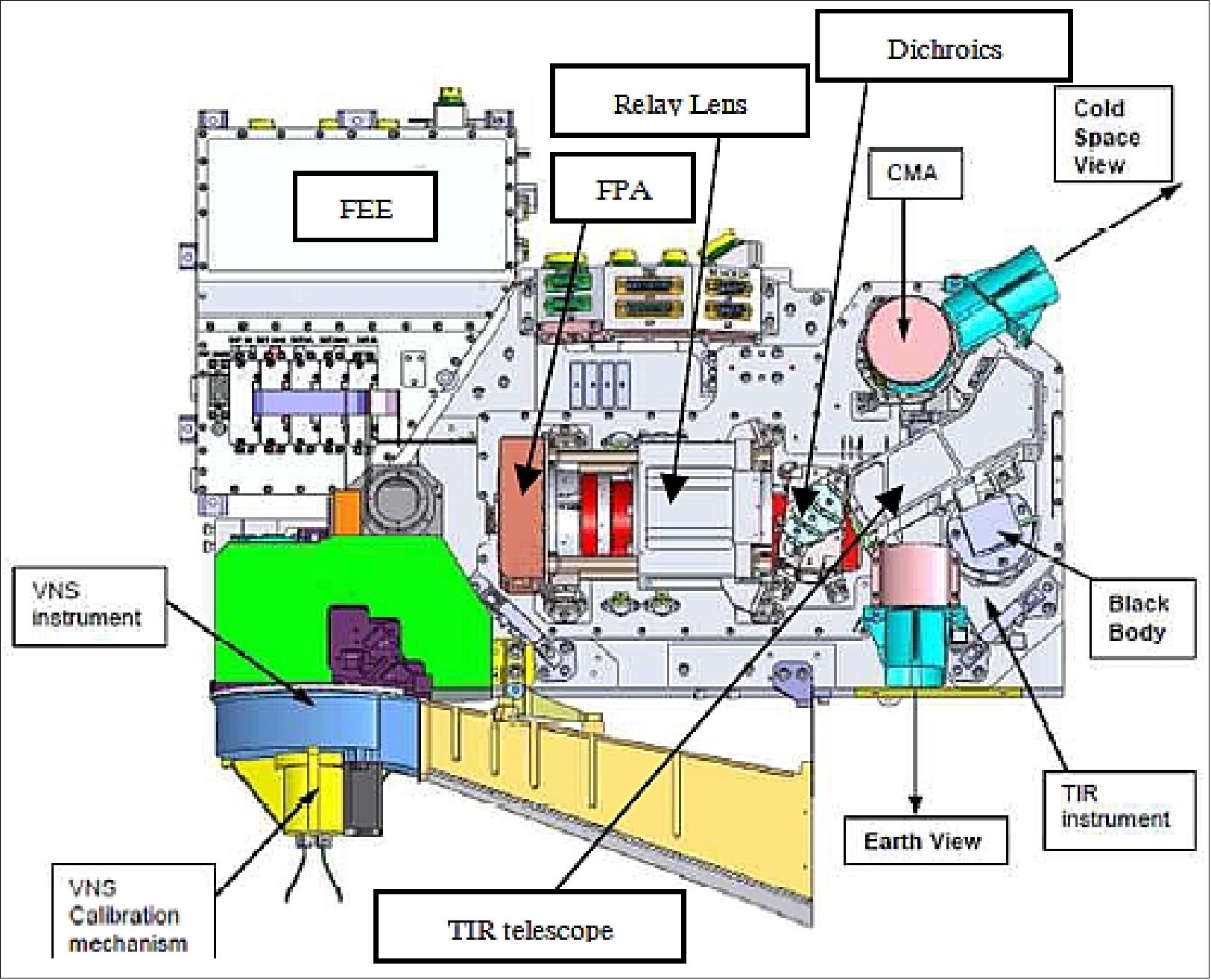
The TIR optics are designed to achieve the following optical parameters: Focal length target: 31.14 mm, cross-track FOV: ±11.5º, along-track FOV: ±0.65º. The mask at the intermediate image plane reduces this to ±11.3º. As such the system images a 156 km by 8 km ground area at minimum altitude.
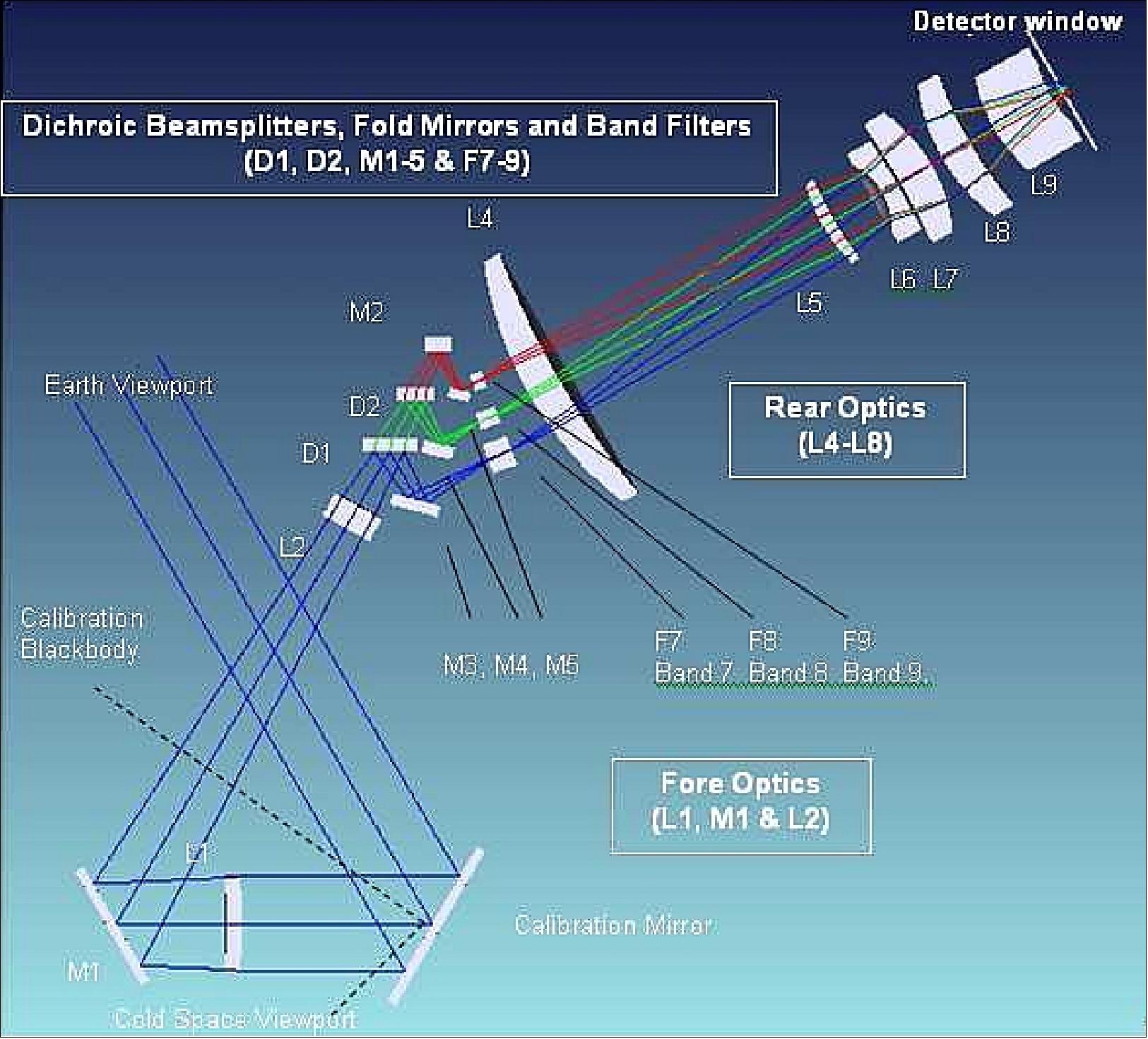
With reference to Figure 60, radiation from Earth is received through the Earth viewport and falls on the calibration mirror. The beam is reflected through an imaging lens (L1), which is nominally 30.6mm in diameter. The beam is then reflected from a fixed fold mirror (M1), through a second lens element (L2), into a system of dichroic, fold mirrors and filters (D1, D2, M2, M3, M4, M5, F7, F8 and F9). The second lens element (Rear Optics L4 to L8) acts partly as a field lens so that the system is close to the telecentric in the region of the dichroic and filters. Two dichroics (D1 and D2) split the beam efficiently into three parts, working at ~30º incidence angle. The three beams are then folded through filters (F7 to F9) onto a common image plane. The primary images are formed within an f/5 beam within the fore-optics (L1 to L2). The filters define the required spectral bands. The system following the filters will be enclosed in a separate cavity – the rear-optics enclosure – with enhanced temperature control. The beams will pass into the enclosure through three slots in a temperature-controlled front plate or mask (Figure 64). After the filters, the three beams are re-imaged onto the detector by a lens system. The magnification factor is nominally 0.2 so that the final image is formed at f/1.

The TIR detectors are much less sensitive than photon detectors, but they offer a much lower-cost solution than photon detector options since:
a) they do not require cooling,
b) they do not require special developments to provide arrays capable of working at wavelengths up to 12 µm.
Simple pushbroom operation would probably not allow the NEDT requirements to be met. However, it is possible to use area array detectors in TDI mode: TDI allows the targets for a radiometric resolution to be met with confidence. However, the use of TDI demands extremely tight control of distortion, much better than 1%.
Moreover, the common optical elements operate over a wide bandpass of ~4 µm.
The method adopted to improve the system NETD combines oversampling and TDI operation. Oversampling is necessary as the detector has a limited range of pixel readout frequency; the maximum rate is due to the maximum operating frequency of the detector’s readout electronics. The minimum rate is constrained due to the problem of self-heating of the detector element during reading, as taking too long will overheat the element and possibly damage or destroy the device.
The oversampling involves reading out the array detector at a rate faster than the dwell period, which is the time it takes the sub-satellite (ground) sample to be observed. TDI is based on the concept of accumulating multiple exposures of the same (moving) scene, effectively increasing the integration time available to collect incident light which provides increased responsivity and allows much greater scanning speeds in low light, or reduced lighting levels at conventional speeds. This can only be achieved provided that 1/f-like noise, which is correlated along rows and down columns is first subtracted. The subtraction of correlated noise also reduces the requirements for temperature stabilization of the instrument and gives an output stable over the period between deep space or blackbody calibrations.
FPA (Focal Plane Array) detector: The microbolometer array to be used in the EarthCARE MSI is a 384 x 288-pixel array (ULIS 03041) with a pixel pitch of 35 µm (Figure 62). The detector element is a film of amorphous silicon suspended on thin legs (for thermal isolation) above a CMOS ROIC. The device is operated in ‘rolling blind’ mode, with a pulsed voltage bias (shown as VFID in Figure 62) being applied one line at a time. During this time the resultant current through the microbolometer is integrated into a CMOS CTIA (Capacitance Trans Impedance Amplifier), with fixed capacitance, so that the change in resistance (due to the change in temperature caused by IR absorption in the amorphous silicon film) can be measured. The device also has good linearity. The use of an on-chip CTIA stage gives a linearity error of less than 1%. The device has a thermoelectric cooler for stabilization of the device temperature, which is normally in the range of 25-30ºC for best performance.
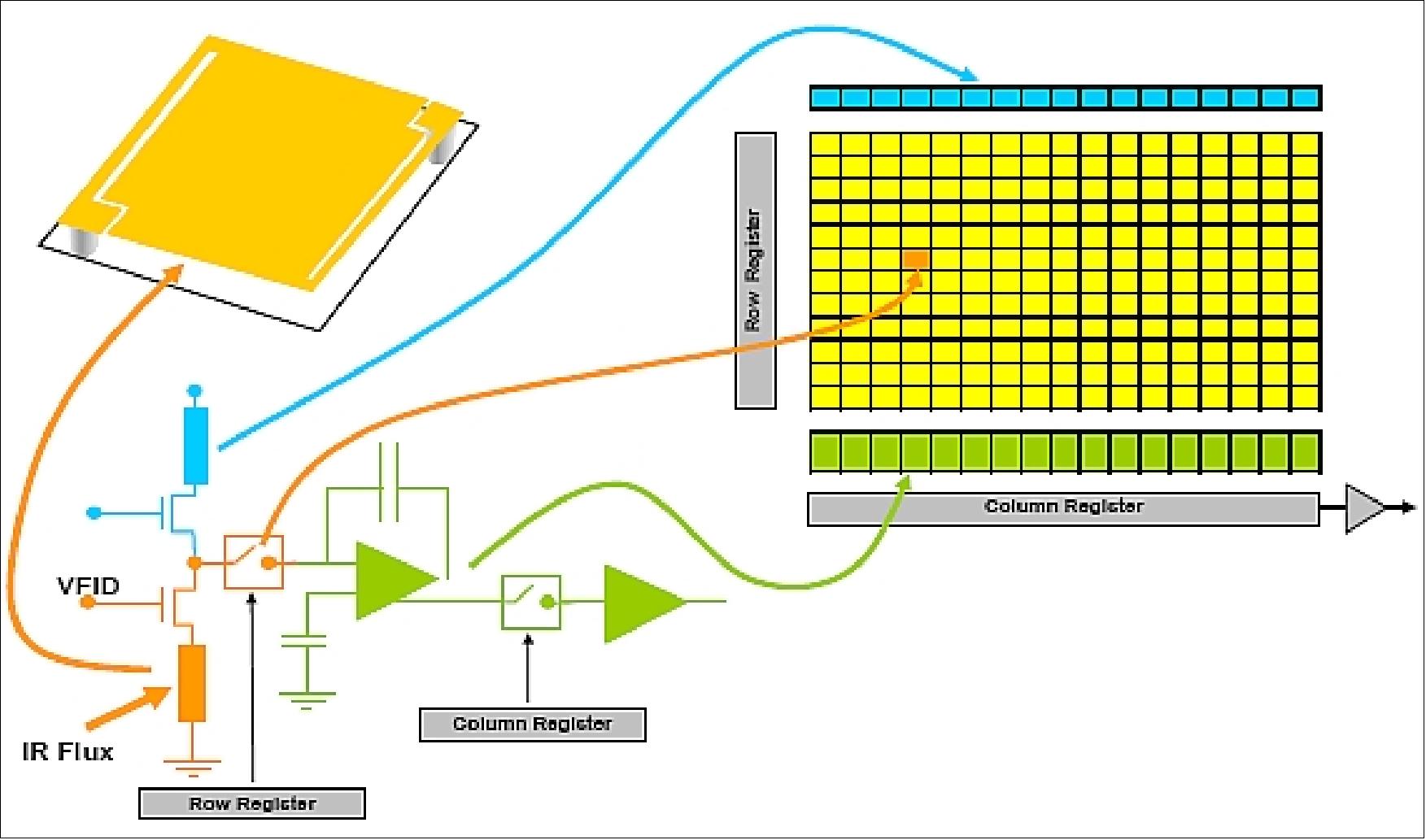
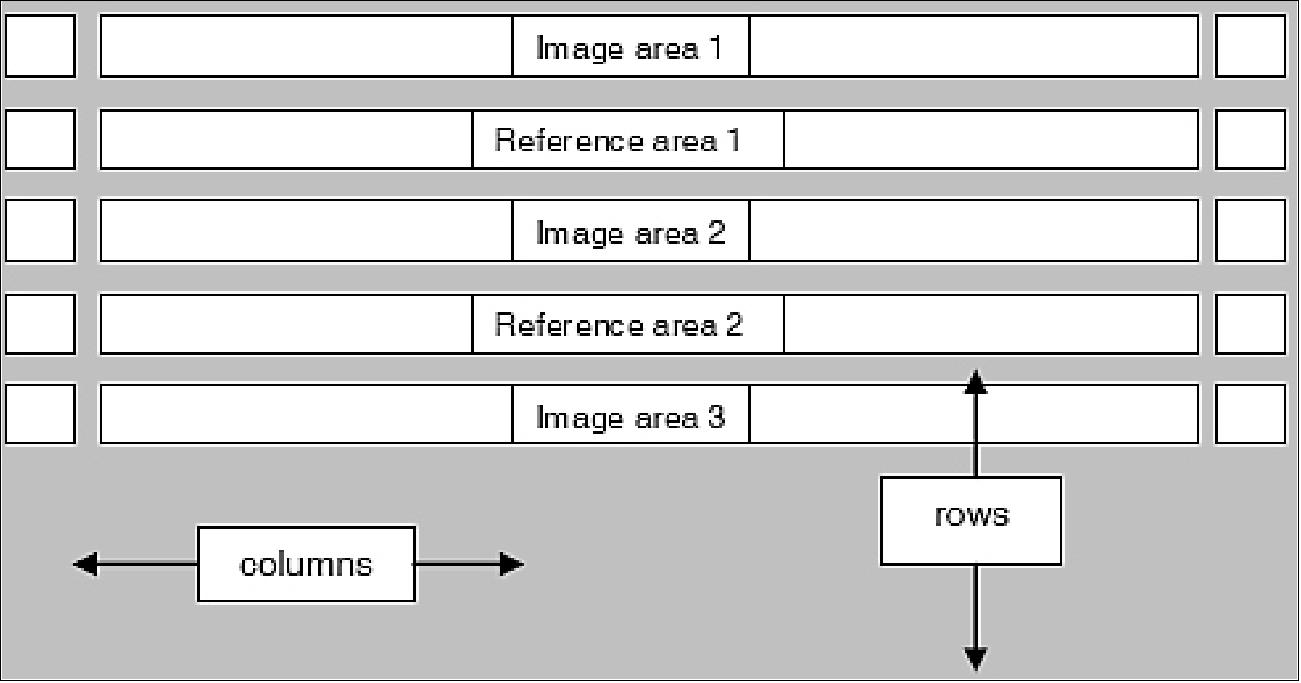
Operating conditions: During the mission, the detector will be used in TDI mode. The detector will be read out in 5 blocks of 20 rows each, with TDI applied to each odd-numbered block such that blocks 1, 3 and 5 represent the optical scene bands from the dichroic filters; band 7 (λcenter = 8.8 µm, BW = 0.9 µm), band 8 (λcenter= 10.8 µm, BW = 0.9 µm) and band 9 (λcenter = 12 µm, BW = 0.9 µm) of the MSI TIROU. The TDI processing is performed in the front-end electronics (FEE) by adding the first line of a block for the first ground line interval to the second line of the block during the second ground line interval etc up to the 20th line (i.e. in TDI mode signals from 20 rows in each image area are coadded from 20 successive frames). During each ground line interval, the detector is readout multiple times (nominally 5) and the pixel data is added to get the data for a ground line interval ready for TDI addition. A schematic diagram of the operating window of the detector is shown in Figure 64.
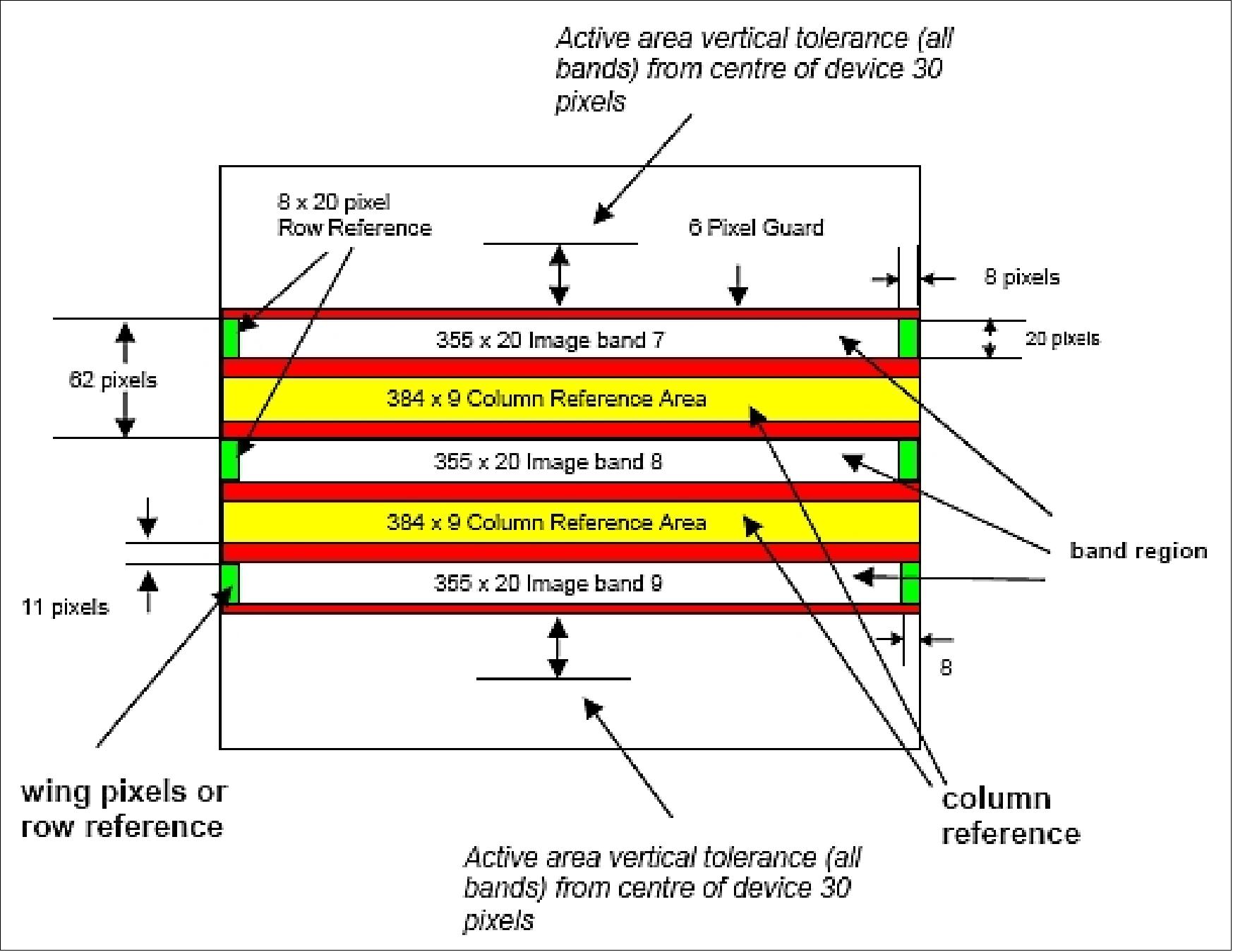
Figure 64 shows a maximum TDI configuration of 20 lines plus 9 lines for each reference band to allow 5 frames readout within the time interval necessary to cover the required ground sample distance, being 500 m or less. Given the specified orbit of the EarthCARE satellite, this equates to a ground line time of approximately 70 ms. The TDI configuration is fully programmable and the number of scene-exposed lines per band has been chosen to give the best performance for the application.
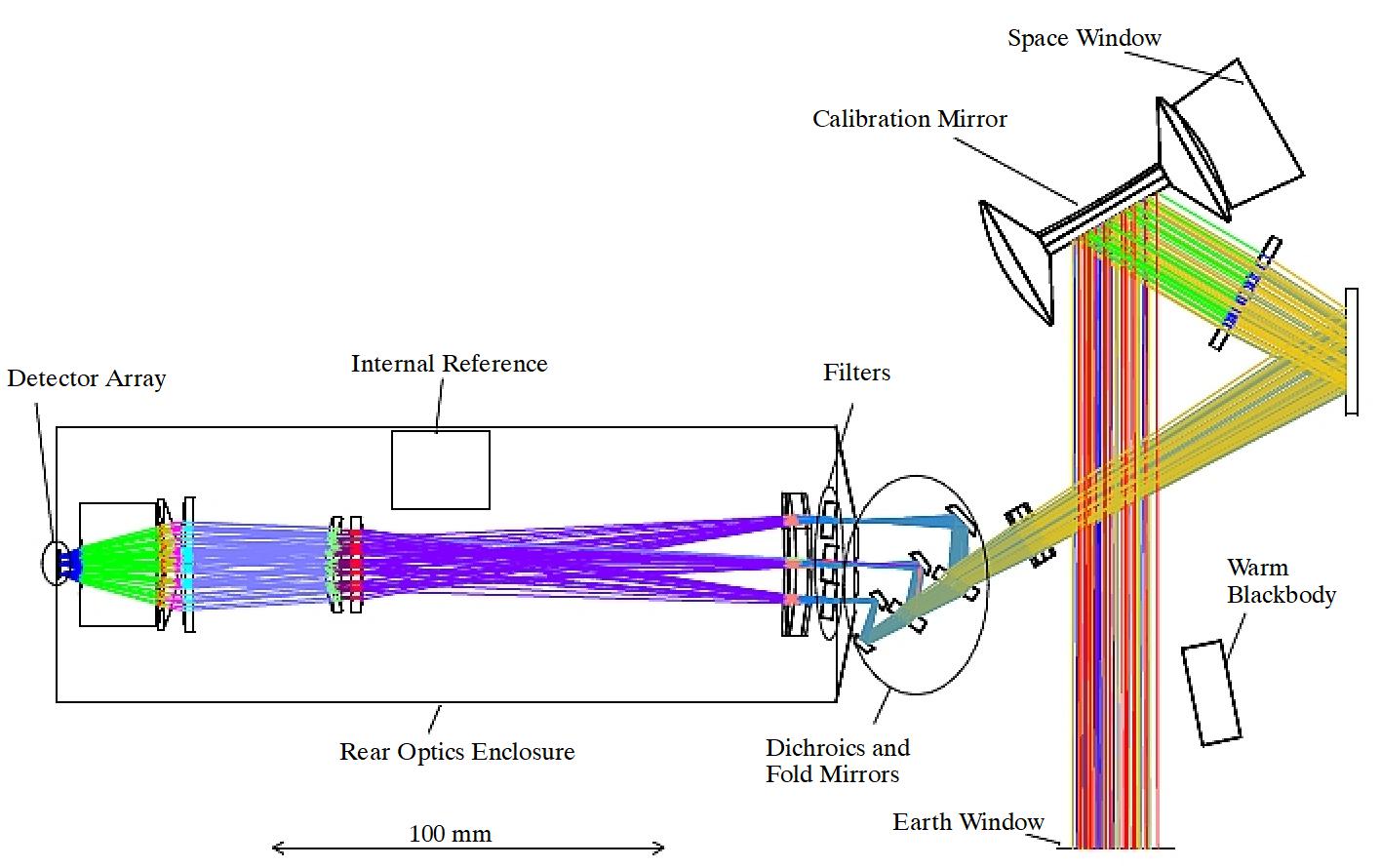
A key driver for the optical design of the TIR subsystem is the requirement for temporal registration of all MSI channels. A single aperture and a single detector are preferred in the system design trade-off, partly for control of system size but also since a single calibration source and a single detector are likely to provide optimum inter-channel relative accuracy. The single-aperture/single-detector approach demands the use of dichroic beam splitters, as indicated in Figure 65, to achieve temporal registration of the three TIR channels.
Calibration method: Light from the ground enters the TIR subsystem through the “Earth window” (Figure 65) and is reflected into the imaging optics by a calibration mirror. The flat calibration mirror reflects the light through a weak fore optics lens, by which it is focused onto the filters, via a fixed fold mirror and the dichroic assembly. A field lens precedes the dichroic assembly: this effectively images the aperture of the fore optics onto the relay lens in the rear enclosure. The intermediate image at the filters is formed at approximately f/4.5.
The calibration mirror is rotatable, as indicated in Figure 65 to provide the views:
a) of cold space,
b) of a “warm” blackbody.
These two views provide the two known radiance levels required for the absolute calibration of all TIR channels. The mirror is used at the same angle of incidence for cold space and Earth views, so that it has the same emissivity in these two configurations, providing a near-perfect zero radiance reference. The dumbbell structures on the mirror are used to block the cold space aperture during Earth view.
The warm black body is viewed by a concave rear face of the calibration mirror, which acts as a collimator for the black body emitting aperture. This allows the black body aperture to be small – it can therefore be a deep-cavity black body, with an emissivity that will always be very close to unity.
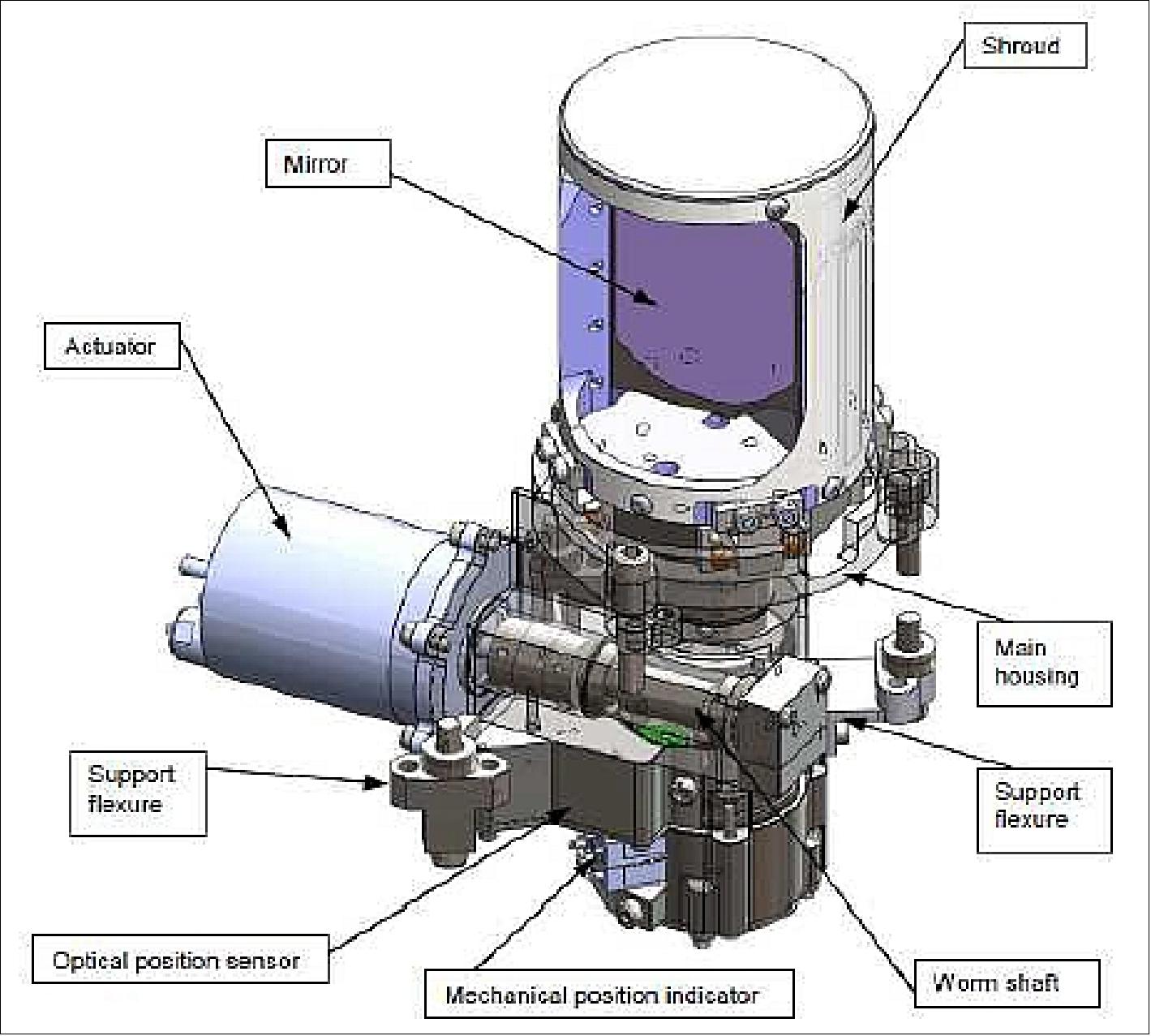
Readout and FEE: The FEE board will provide the front-end electronics for the TIR and the other MSI instrument the VNS (visible and near-infrared spectrometer). A block diagram for the FEE showing the TIR Detector interface is depicted in Figure 67. The FEE will provide the interface between the optical unit and the ICU (Interface Control Unit) providing all the clocks and biases to the detector. The main control of the FEE is in the FPGA which generates the clocks, controls the mode of operation and processes all the TIR data. The FEE regulator is used to adjust biasing and supply all the voltages for the focal plane. An adjustable TIR timing generator is used to clock the focal plane and the 14-bit ADC for digitization and processing the readout data.
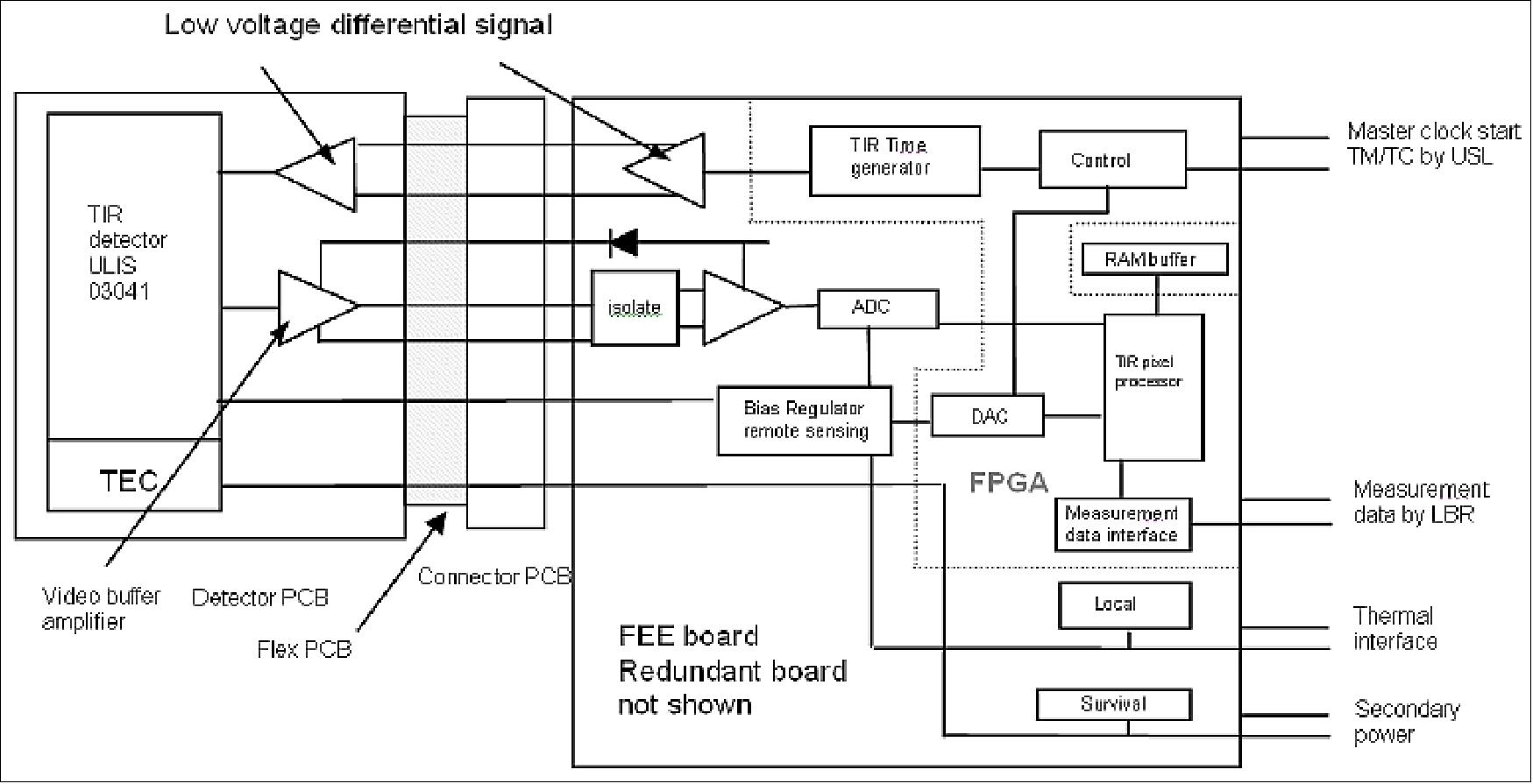
The TIR timing generator is a programmable unit that provides the clock signals (SYP, SYL and SYT) necessary for operating the on-chip sequencer of the microbolometer array for pixel, line and frame synchronization respectively. This on-chip sequencer generates all the necessary internal signals for the readout integrated circuit operation.
Readout of a frame for the detector is as follows:
1) Start with the SYT frame pulse
2) Follow with a number of SYL pulses (used to skip lines to the first readout band, band 7)
3) Read out the first line within the band with a sequence of SYL pulses followed by 384 SYP pixel clocks
4) Repeat for each line of the band
5) Skip to the next area with a number of SYL pulses
6) Repeat steps 3 to 5 until the last band is reached
7) For the last band, repeat steps 3 to 4.
TIR mechanical and optical design: The focal plane array of the TIROU has the microbolometer array attached directly to a focal plane heat sink. This heat sink forms the main structural mount (Figure 68a) and bolts directly onto the lens assembly. The detector is bolted onto the plate, with its fine positioning achieved by the use of dowels. Permanent fixation is achieved by locking the bolts with adhesive. The microbolometer is then soldered onto the electronics board and the board is glued in position to the detector structural mount. The focal plane array is then positioned in place relative to the lens housing. The FPA mounted into the TIROU is shown in Figure 68b.
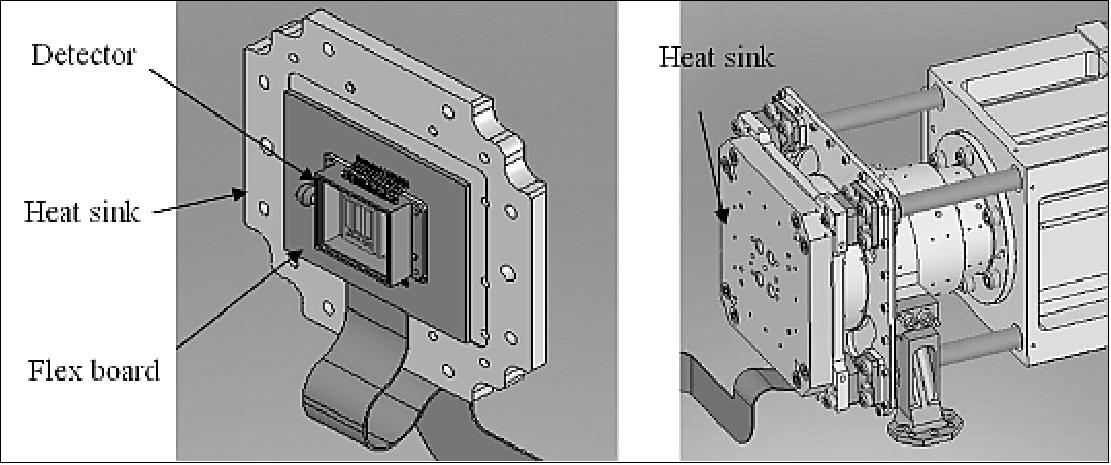
A cross-section of the whole mount is shown in Figure 69 showing all parts of the focal plane.
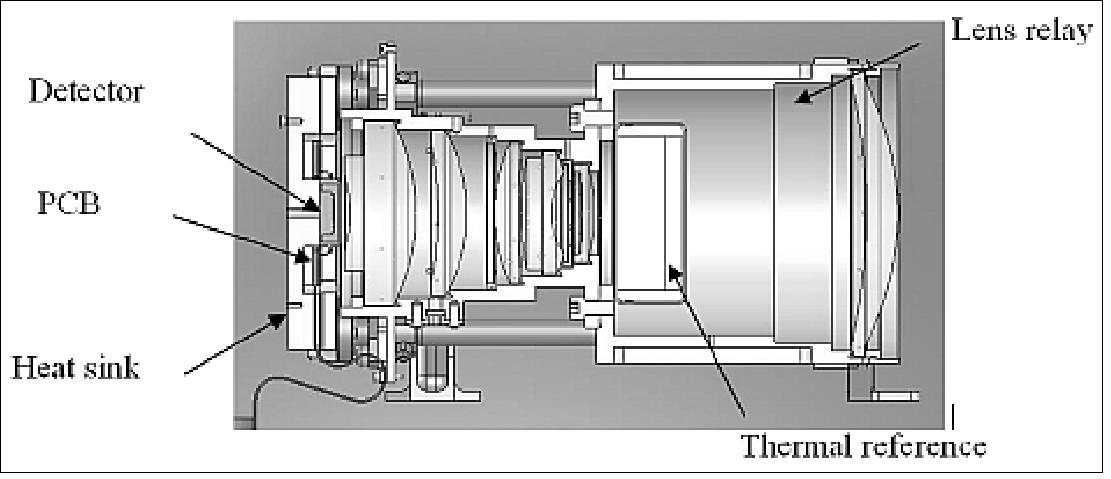
BBR (Broadband Radiometer)
BBR is an ESA multi look along-track instrument with a 10 km footprint (heritage of ScaRaB). The objective is to provide measurements of the reflected short-wave (SW channel, 0.25-4 µm) and the emitted long-wave (LW channel, 4.0-50 µm) radiance at the top of the atmosphere (TOA) along three along-track views (forward, nadir, and backward). The BBR has a spectral channel and accuracy requirements typical for ERB (Earth Radiation Budget) instruments. 85) 86) 87) 88) 89) 90)
The instrument is required to observe the incoming radiances in three different directions continuously – nadir, forward and backwards. The forward and backward views cover the scene with an OZA (Observational Zenith Angle) of 55º, equivalent to an offset between the three telescopes of 50º. The optical design provides equal pixel sizes (10 km x 10 km) for all three views. There is no cross-track swath. Co-registration to 10% of the footprint size of all views is required.
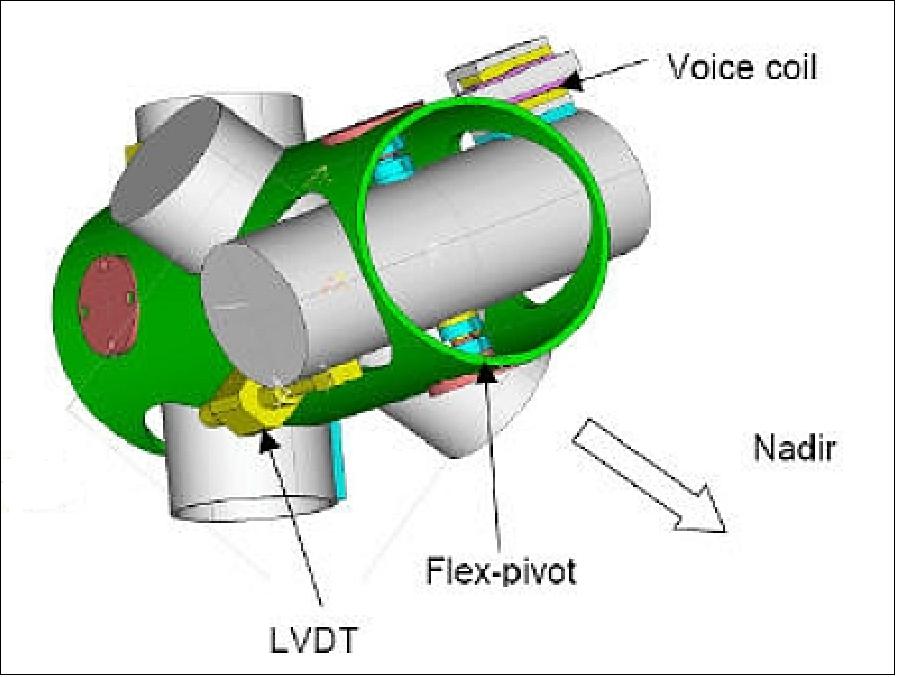
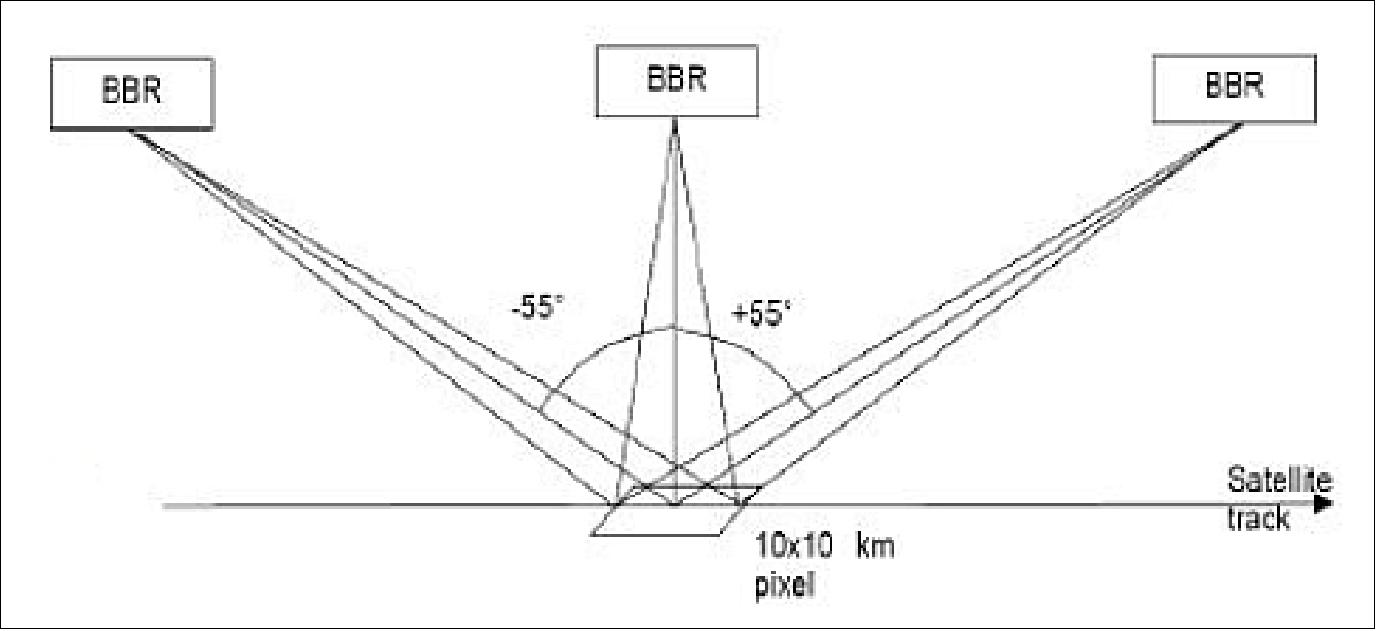
The instrument is a two-channel radiometer, in which the LW channel is obtained by subtracting the SW component from a channel covering the complete spectral range. Dedicated telescopes are used for all views. They are mounted together in one block, allowing them to be moved also towards an internal black body simulator and external views for calibration. A channel selector revolves around the telescopes to modulate the incoming flux (as the detectors are only sensitive to alternating signals), and to generate the two spectral channels. The scene measurements are over-sampled in all three views to correct scene altitude errors by post-processing. The telescope assembly is moved in the across-track direction by a mechanism to compensate for the rotation of the Earth thereby ensuring co-registration of the three views.
The importance of this measurement technique is that it provides data to drive the algorithm that converts the instrument-measured flux to the hemispherical TOA radiance.
The BBR instrument is being designed and developed by a UK-led consortium with SEA (Systems Engineering & Assessment Ltd.) as the prime contractor, with RAL (Rutherford Appleton Laboratory) responsible for the BBR optics unit, Sula Systems Ltd., ESR Electronic Components Ltd., INO of Canada, SciSys, and LMD (Laboratoire de Météorologie Dynamique du CNRS.) of France. 91)
Instrument views | Observation at 3 different views (forward nadir, and backward) |
Instruments channels | - reflected short-wave (SW channel, 0.2-4 µm), accuracy of 2.5 W m2 sr-1 |
Pixel size | 10 km x 10 km for all three telescopes; 0.1 pixel co-registration |
Calibration | - Sun calibration via diffuser |
Instrument mass, power | 27 kg, 43 W (including margins) |
Data rate | < 50 kbit/s |
Table 11: Overview of instrument parameters
BBR instrument: The instrument design (of GERB heritage) is physically separated into two units:
a) OU (Optics Unit), which is external to the spacecraft,
b) the ICU (Instrument Control Unit) which is internal to the spacecraft.
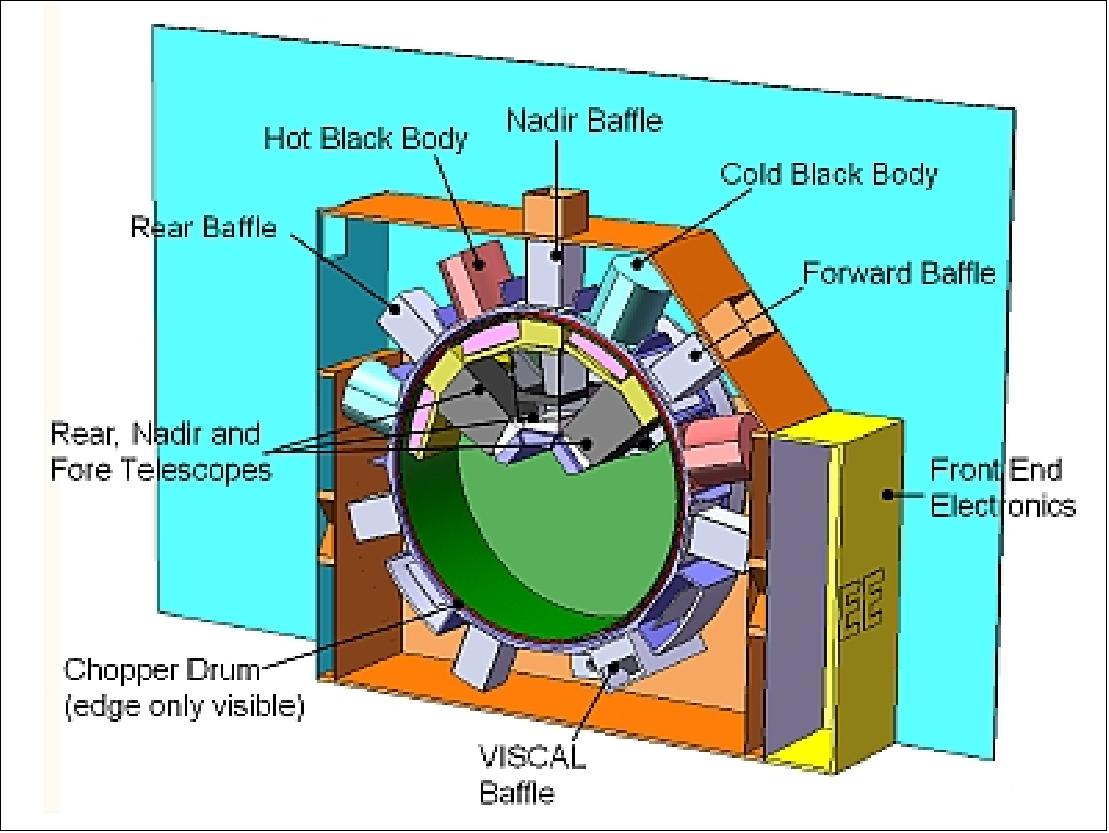
Detector: The detectors are required to provide fast pixel response time (< 6 ms), uniform spectral response over the entire spectral range (0.25-50 µm), and a NEP (Noise-Equivalent Power) lower than 3.7 nW at 17 Hz (after time averaging over a period of 20 ms). The engineering model detector is shown in Figure 73, with (right) and without (left) its cover.
The detector assembly selected for BBR is a vanadium oxide uncooled microbolometer array of size: 32 x 1 pixels and based on MEMS technology; it is manufactured by INO (National Optics Institute) of Quebec City, Canada. The thermistor-based detector is a 100 µm pitch device with a high fill factor and fast response (4 ms time constant) providing good linearity and noise performance characteristics. The detector is black-coated to achieve a good broadband response. The pixels are read out via a Xenics ROIC (Readout Integrated Circuit), similar to that being used for the InGaAS photodiode array on the MSI instrument.
The device is constructed based on layers, including a sacrificial supporting one that is etched away during the process that releases the active element from its substrate, leaving it connected simply by thin legs.
The FPA interfaces to the ROIC with a carrier chip that is used to compensate for the different pad pitches of both dies and the circuit-card assembly (CCA). All interconnections are performed by use of aluminium-wire ultrasonic wedge-wedge bonding. The CCA provides basic electrical functions such as signal routing, decoupling and filtering, and is the primary interface to the instrument FEE (Front End Electronics) through the unit’s connector. The assembly is completed by a base plate and (windowless) cover, which provide the mechanical and optical interfaces to the instrument telescope.
In the BBR instrument, the FEE provides separate voltages to the bolometric pixels (Vbolo) and to the shunt pixels (Vshunt) with respect to the ROIC reference voltage (Vref, also provided by the FEE). The FEE also sets the ROIC gain parameters, namely the integrator capacitance (Cint) and integration time (tint). The thermometer pixels (wired as single resistances directly to their respective ROIC input) are also biased by the FEE with a dedicated voltage (Vthermo) with respect to the same reference voltage.
Within the detector development program, the next unit built will be the engineering qualification model (EQM). The performance of this unit will be fully characterized after being subjected to environmental tests, namely for sinusoidal (24 g) and random (14 g rms) vibration testing, and for 8.5 thermal cycles under vacuum over the operational temperature range from -25ºC to 45ºC (including one excursion to the non-operating temperatures of -40ºC and 50ºC). The EQM will be validated for performance and visual inspection criteria before, during, and after the environmental tests.
Telescopes: The detectors and ROIC, together with a mounting plate and PCB (Printed Circuit Board), form the FPA (Focal Plane Assembly), which is mounted into each of the telescopes. Each telescope consists of a 67 mm focal length f/2 off-axis paraboloid mirror, 30 mm square aperture, with appropriate straylight baffling. Thermal stability control is provided at the telescope level. The telescopes are aluminium coated.
Each telescope also includes a triplet of ageing monitor photodiodes in the baffle walls. These are used during solar diffuser calibration to monitor the output of the SW calibration subsystem. The three telescopes are mounted on a common baseplate, and housed in a thermal shield, with a fixed housing. This fixed telescope assembly is itself mounted – cantilevered – from one of the instrument's main structural panels to provide good alignment.
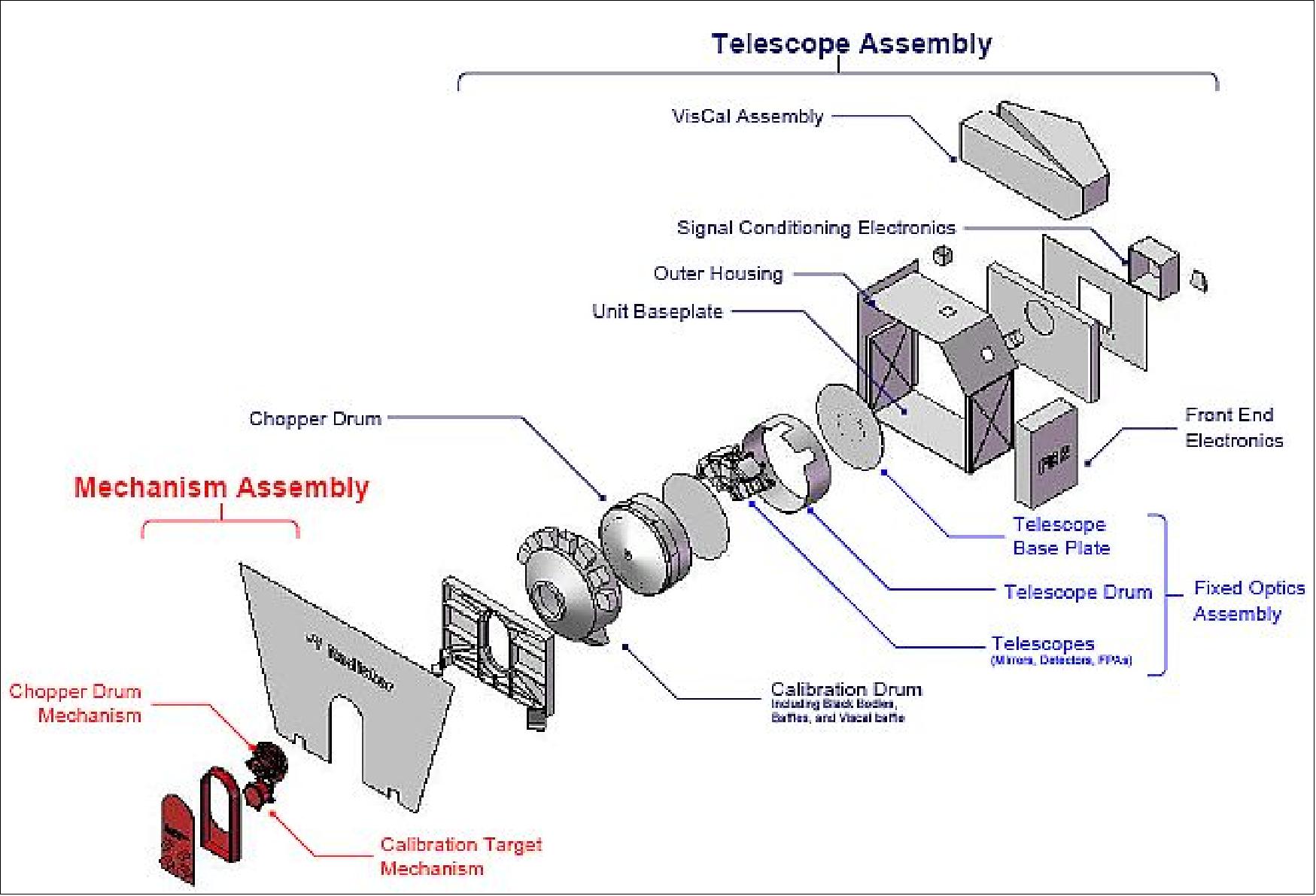
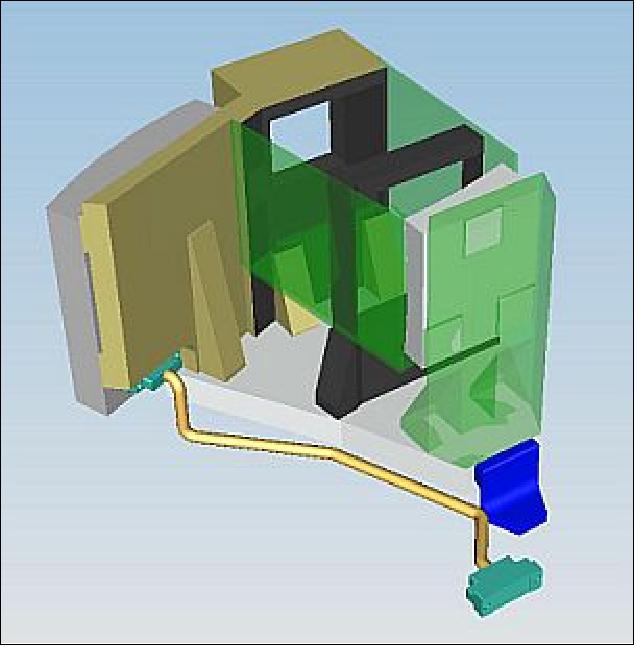
Chopper: The chopper drum is a thin shell of aluminium containing four regularly spaced apertures, two of which include thin quartz/Suprasil filters. The chopper drum is rotated at 261rpm in order to achieve the required ground spacing distance. There are no electronic components on the chopper drum. The chopper nearly completely encloses the fixed telescope assembly; this provides a good thermal homogenization effect, thus reducing thermal gradients and improving thermal stability.
Calibration drum and calibration targets: Around the outside of the chopper drum is the calibration drum. On this drum are mounted four black bodies (a pair of warm black bodies and a pair of cold black bodies). Four black bodies are required instead of two in order to speed up the calibration process.
In addition, a fold mirror is used to provide the telescopes with a view into the SW calibration subsystem (VisCal). Only one fold mirror is used; this mirror is patrolled between the three telescopes so that it is the same mirror in each view, thus maximizing calibration commonality.
In addition, another triad of monitor photodiodes is placed on the drum, looking into the SW calibration subsystem. These further characterize the SW ageing of the instrument, by allowing the measurement to differentiate between ageing in the VisCal optics and in the photodiodes.
VisCal: Once per orbit, the relative positions of the spacecraft and sun, and the arrangement of baffles in the solar calibration subsystem, allow the solar diffuser (Spectralon) to be illuminated. At this time, the calibration drum is rotated so that the fold mirror is in front of one of the telescopes; the telescope then acquires data to allow the ageing monitoring to be performed. The assembly of fold mirrors, baffles, and solar diffusers is called the VisCal (Visible Calibration system).
MA (Mechanism Assembly): At the heart of the BBR instrument is a mechanism assembly (Figure 76), comprising two nested bearing assemblies driving a chopper drum and a calibration drum. The former controls the passage of light into the three telescopes while the latter positions the viewing baffles and calibration sources, which are intermittently brought into view to calibrate the instrument. Although both consist simplistically of a brushless DC motor and optical encoder, both have very different operational requirements in terms of load, lifetime and motion profiles. 92)
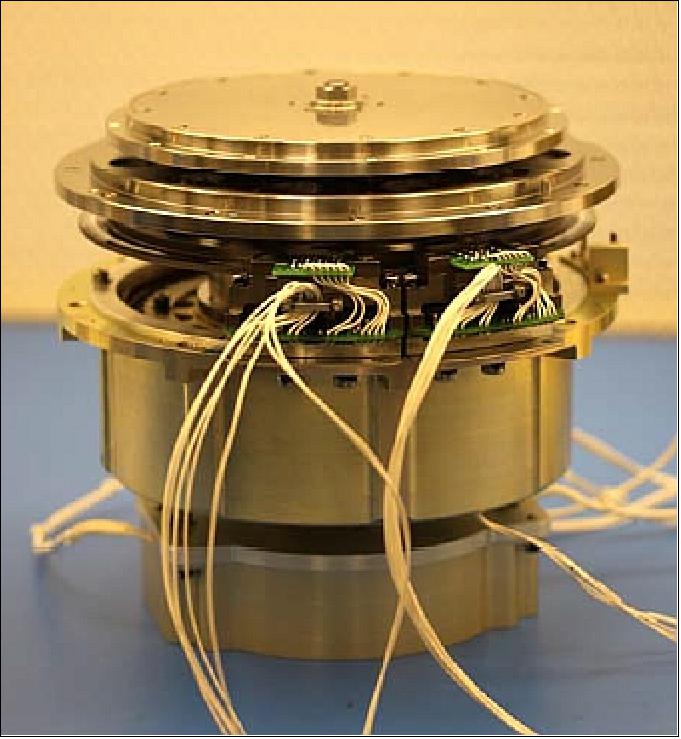
The Mechanism Assembly consists of two main mechanism subsystems and elements of the thermal control system. The assembly includes a common support structure around which the CTM (Calibration Target Mechanism) rotates, while the CDM (Chopper Drum Mechanism) shaft lies at the center. The outer housing forms the main interface to the instrument, which is situated on the side wall of the aluminium honeycomb structure. There are also interfaces to both of the drums which are supplied as part of the Telescope Assembly, and both contain optical elements.
The CDM at the center of the assembly rotates continuously at 261 rpm. This allows light to pass into the three telescope assemblies which gather measurement data in three viewing directions – fore, nadir and aft.
The MA is shown in Figure 77 with the first driving the chopper drum. This comprises a direct drive DC brushless motor, with very low friction bearings, attached to the chopper drum. An optical encoder (relative, with reference pulse) is used to determine the chopper drum position and hence allow the instrument software to control the chopper speed. A particular issue is the lifespan of the chopper drum mechanism. Over the mission life, given that the chopper drum is continuously driven, the chopper will accumulate ~500 million revolutions; hence to demonstrate the acceptability of bearing wear, a (long duration) life test model will be performed.
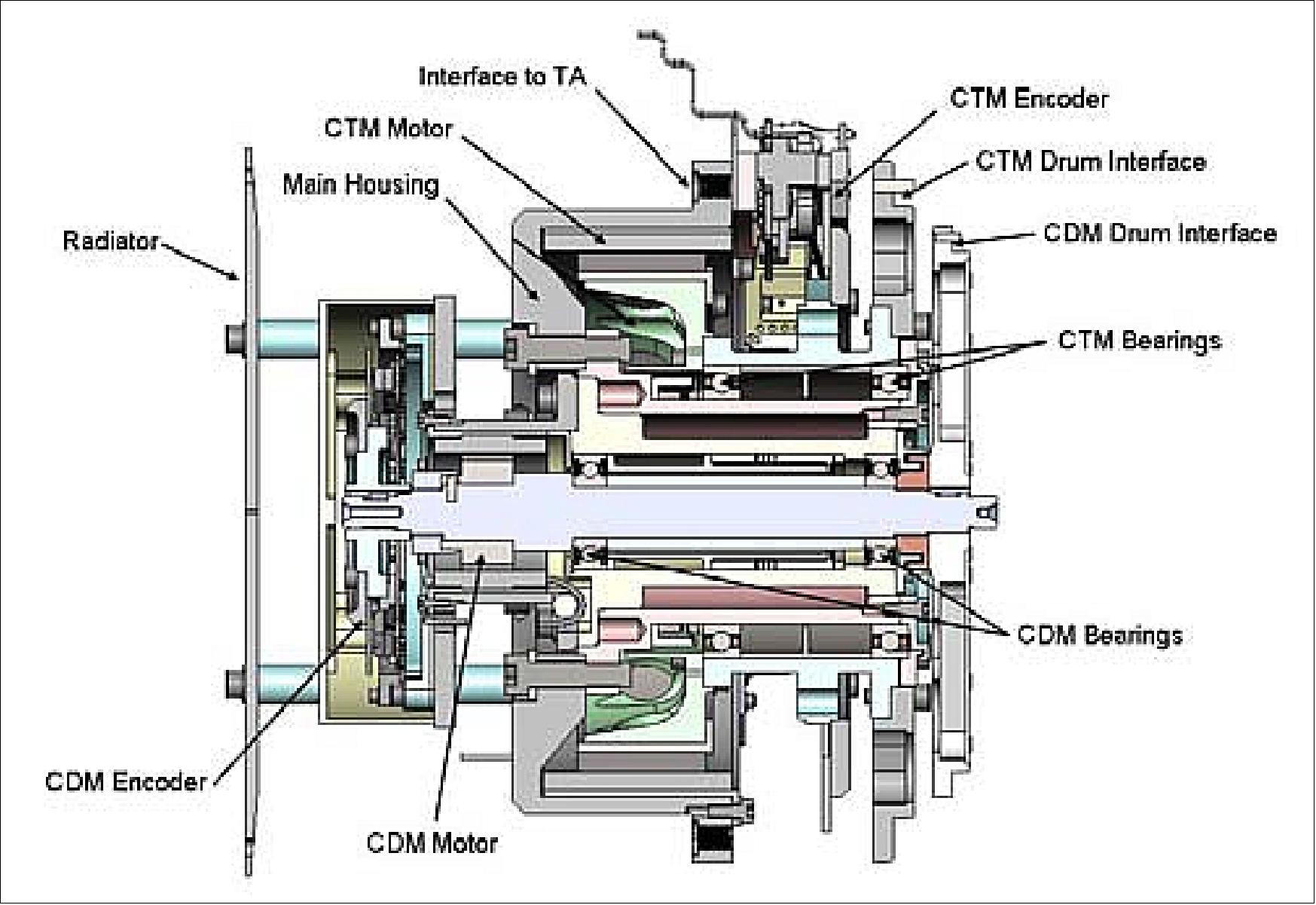
The CTM (Calibration Target Mechanism) rotates a drum containing a number of viewing baffles, 4 black-body calibration sources, two black-body electronics assemblies, a fold mirror for the visible calibration assembly and a cassette of monitor photodiodes to measure the relative ageing of the mirrors. This drum is required to perform regular periodic slews to bring the various calibration sources into view. Over the duration of the mission, this mechanism will be required to perform just over 1 million high-speed slews over ±25º and 180º, the vast majority being over the smaller range. These slews are performed for total-wave (TW) calibration and short-wave (SW) calibration respectively. Magnetic detents are employed in the calibration locations and a magnetic end-stop is employed to act as a passive launch lock and optically-safe park position.
ICU (Instrument Control Unit): The bulk of the instrument's electronics – including power conditioning, TM/TC handling, processor board, software, thermistor conditioning, mechanism control and drive, etc. – is located in the ICU. This is a smaller unit consisting only of electronic boards (Figure 78) and is located within the body of the spacecraft.
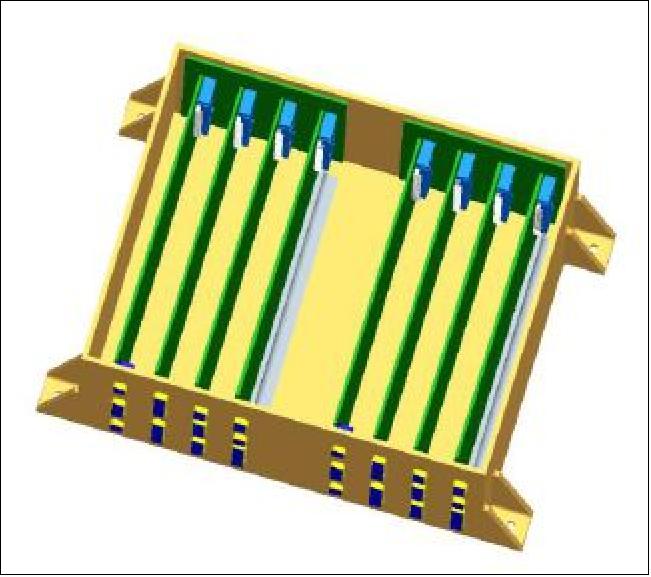
References
1) http://www.esa.int/esaLP/ASESMYNW9SC_LPearthcare_0.html
2) J.-L. Bézy, W. Leibrandt, A. Hélière, P. Silvestrin, Chun-Chi Lin, P. Ingmann, T. Kimura, H. Kumagai, “System, spacecraft, and instrument concepts for the ESA Earth Explorer EarthCARE Mission,” Proceedings of 11th SPIE International Symposium on Remote Sensing, Bruges, Belgium, Sept. 19-22, 2005, Vol. 5978, `Sensors, Systems, and Next-Generation Satellites IX,' Roland Meynart, S. P. Neeck, H. Shimoda, Editors, Oct. 21, 2005
3) .J.-L. Bézy, W. Leibrandt, A. Hélière, P. Silvestrin, C.-C. Lin, P. Ingmann, T. Kimura, H. Kumagai, “The ESA Earth Explorer EarthCARE Mission,” Proceedings of the SPIE Conference Optics & Photonics 2005, Vol. 5882-17, San Diego, CA, July 31 - Aug. 4, 2005
4) “EarthCARE - Earth Clouds, Aerosols and Radiation Explorer,” ESA SP-1279(1), April 2004, ISBN 92-9092-962-6, http://esamultimedia.esa.int/docs/SP_1279_1_EarthCARE.pdf
5) ”EarthCARE - Earth Clouds, Aerosols and Radiation Explorer,” Report for Assessment, ESA SP-1257(1), September, 2001
6) J.-L. Bézy, W. Leibrandt, P. Silvestrin, P. Baptista, A. Kawamura, R Oki, M. Suzuki, H. Kumagai, ”System Definition of the ESA Earth Explorer EarthCARE Mission,” SPIE Conference, Crete, Greece, Sept. 23-27, 2002, Vol. 4881
7) P. Ingmann, T. Wehr, members of the EarthCARE team, “EarthCARE - A new Mission Providing Global Cloud and Aerosol Profiles,” Proceedings of the 2005 EUMETSAT Meteorological Satellite Conference, Dubrovnik, Croatia, Sept. 19-23, 2005, pp. 426-432
8) EarthCARE Workshop at ESA/ESTEC, Noordwijk, The Netherlands, May 7-9, 2007 (program, presentations), URL: http://www.congrex.nl/07c08/
9) A. Lefebvre, “EarthCARE Technical and Programmatic Overview,” URL: http://www.congrex.nl/07c08/presentations%5CWelcome%20Session%5C04_Lefebvre.ppt
10) “EarthCARE - The Earth Clouds, Aerosols and Radiation Explorer,” Earth Explorer User Consultation Meeting, April 19-29, 2004, URL: http://esamultimedia.esa.int/docs/EEUCM/EarthCARE_handout.pdf
11) http://www.esa.int/esaLP/LPearthcare.html
12) S. Katagiri a, R. Oki, S. Shimizu, T. Kimura, T. Nakajima, H. Okamoto, N. Sugimoto, T. Y. Nakajima, M. Sato, Y. Takayabu, K. Sato, T. Nishizawa, T. Matsui, Y. Hagihara, “EarthCARE Science Mission Objectives,” Proceedings of ISPRS (International Society for Photogrammetry and Remote Sensing) Technical Commission VIII Symposium, Kyoto, Japan, Aug. 9-12, 2010, URL: http://www.isprs.org/proceedings/XXXVIII/part8/headline/JAXA_Special_Session%20-%204/JTS41_20100226114956.pdf
13) R. Oki, T. Kubota, , S. Katagiri, M. Kachi, S. Shimizu, M. Kojima, K. Kimura, “Cloud and Precipitation Observation by Spaceborne Radar in Japan: Current and Future Missions,” Proceedings of ISPRS (International Society for Photogrammetry and Remote Sensing) Technical Commission VIII Symposium, Kyoto, Japan, Aug. 9-12, 2010, URL: http://www.tric.u-tokai.ac.jp/ISPRScom8/TC8/TC8_CD/headline/JAXA_Special_Session%20-%204/JTS45_20100305093927.pdf
14) Anthony Illingworth, “EarthCARE - Cloud radar and lidar in space by 2015,” 7th Appleton Space Conference, RAL (Rutherford Appleton Laboratory), Didcot, UK, Dec. 8, 2011, URL: http://www.stfc.ac.uk/RALSpace/resources/PDF/Presentation_8.pdf
15) Anne Grete Straume, Paul Ingmann, Tobias Wehr, “ESA's Spaceborne Lidar Missions: Candidate and Selected Concepts for Wind, Aerosols and CO2 Monitoring,” Proceedings of the 26th International Laser Radar Conference (ILRC 26), Porto Heli, Peloponnesus, Greece, June 25-29, 2012
16) T. Wehr, T. Fehr, P. Ingmann, J. v. Bismarck, ”The EarthCARE mission:An active view on aerosols, clouds and radiation,” Earth Observation for Water Cycle Science 2015, Frascati, Italy, 20-23 October, 2015, URL: http://congrexprojects.com/custom/15C10/D1_1530_BISMARK.pdf
17) http://www.esa.int/esaLP/SEMMBQ1YUFF_LPearthcare_0.html
18) Uwe Slansky, “EarthCARE,” May 13-14, 2009, URL: http://www.dlr.de/rd/Portaldata/28/Resources/dokumente/industrie/rfit09/EarthCARE.pdf
19) T. Wehr, P. Ingmann, T. Fehr, ”The EarthCARE mission: An active view on aerosols, clouds and radiation,” ATMOS Conference 2015, Heraklion, Crete, Greece, June 8-12, 2015, URL: http://seom.esa.int/atmos2015/files/presentation113.pdf
20) http://www.space-airbusds.com/en/programmes/earthcare-kc5.html
21) Daniel Ruf,, Gilles Beaufils, “The EarthCARE Power System,” Proceedings of the 9th European Space Power Conference, Saint Raphael, France, June 6-10, 2011, ESA SP-690
22) ”EarthCARE taking wing,” ESA Enabling & Support, 27 July 2022, URL: https://www.esa.int/ESA_Multimedia/Images/2022/07/EarthCARE_taking_wing
23) ”EarthCARE takes a big stretch,” ESA Applications, 21 July 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/EarthCARE/EarthCARE_takes_a_big_stretch
24) João Pereira do Carmo, Geraud de Villele, Kotska Wallace, Alain Lefebvre, Kaustav Ghose, Thomas Kanitz, François Chassat, Bertrand Corselle, Thomas Belhadj and Paolo Bravetti, ”ATmospheric LIDar (ATLID): Pre-Launch Testing and Calibration of the European Space Agency Instrument That Will Measure Aerosols and Thin Clouds in the Atmosphere, MDPI, Atmosphere 2021, Volume 12, Issue 1, Published: 6 January 2021, https://doi.org/10.3390/atmos12010076
25) ”Successful integration of ATLID completes the European set of instruments for EarthCARE satellite,” Airbus Press Release, 17 June 2020, URL: https://web.archive.org/web/20210928135118/https://www.airbus.com/newsroom/press-releases/en/2020/06/successful-integration-of-atlid-completes-the-european-set-of-instruments-for-earthcare-satellite.html
26) Alain Lefebvre, Arnaud Hélière, Kotska Wallace, João Pereira do Carmo, Hirotaka Nakatsuka, Eiichi Tomita, ”The ESA EarthCARE mission: Approaching Launch,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Valencia, Spain, July 23-27, 2018
27) ”EarthCARE: Japanese Cloud Radar meets its spacecraft for the first time at Airbus’ Satellite Center in Friedrichshafen,” Airbus DS, April 19, 2017, URL: https://airbusdefenceandspace.com/newsroom/news-and-features/earthcare-japanese-cloud-radar-meets-its-spacecraft-for-the-first-time-at-airbus-satellite-centre-in-friedrichshafen/
28) ”Call for EarthCARE mission advisory group,” ESA, April 4, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/EarthCARE/Call_for_EarthCARE_mission_advisory_group
29) ”EarthCARE;” ESA Bulletin No 165-168, Feb. 2016, published January 2017, URL: http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-165-168/offline/download.pdf
30) ”Arianespace and ESA announce EarthCare launch contract,” Arianespace Press Release, 28 October 2019, URL: https://www.arianespace.com/press-release/arianespace-and-esa-announce-earthcare-launch-contract/
31) Thomas Ormston, Nic Mardle, Dirk Kuijper, “Orbit Control Manoeuvre Strategy for EarthCARE,” SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1859
32) “EarthCARE - Earth Clouds, Aerosols and Radiation Explorer Technical and Programmatic Annex,” Annex to ESA SP-1279(1), April 2004, URL: http://esamultimedia.esa.int/docs/EEUCM/EarthCARE_TPA.pdf
33) A. Hélière, A. Lefebvre, T. Wehr, J.-L. Bézy, Y. Durand, “The EarthCARE Mission: Mission concept and lidar instrument pre-development,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
34) Tobias Wehr, Paul Ingmann, Dulce Lajas, Arnaud Heliere, “EarthCARE, Towards a Quantification of Cloud-Aerosol-Radiation Interactions,” URL: http://ams.confex.com/ams/pdfpapers/117009.pdf
35) Tobias Wehr, “EarthCARE - The Earth Cloud Aerosol and Radiation Explorer with some remarks on other future ESA missions,” GlobCloud Workshop, March 25-27, 2009, Berlin, Germany
36) Michael Eisinger, Tobias Wehr, Dulce Lajas, Alain Lefebvre, “EarthCARE – The Earth Cloud, Aerosol and Radiation Explorer mission,” Proceedings of the 8th International Symposium on Tropospheric Profiling, ISBN 978-90-6960-233-2, Delft, The Netherlands, October 2009,. Editors, A. Apituley, H.W.J. Russchenberg, W.A.A. Monna, URL: http://cerberus.rivm.nl/ISTP/data/1767472.pdf
37) R. V. Gelsthorpe, A. Heliere, A. Lefebvre, J. Lemanczyk, E. Mateu, A. Perez-Albinana, K. Wallace, “Aspects of the EarthCARE satellite and its payload,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7826-15, 'Sensors, Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, doi: 10.1117/12.868382
38) T. Wehr, “The EarthCARE Satellite Mission, Linking clouds, aerosols and radiation,” Workshop Observations and modelling of aerosol and clouds properties for climate studies, Paris, France, Sept. 12-14, 2011, URL: http://www-loa.univ-lille1.fr/workshops/workshop2011/PDF%20SESSION%202-1/Wehr_EarthCARE_Paris-Sept-2011.pdf
39) M. Eisinger, A. Straume, S. Pinnock, ”ESA aerosol sensors and activities,” ICAP 7 (International Cooperative for Aerosol Prediction-7) Workshop, Barcelona, June 16-16, 2015, URL: http://icap.atmos.und.edu/ICAP7/Day4/ESA_Earth_CARE_Eisenberg.pdf
40) Arnaud Hélière , Robert Gelsthorpe, Lénaïc Le Hors, Yves Toulemont, “ATLID, the Atmospheric Lidar on board the EarthCARE Satellite,” Proceedings of the ICSO (International Conference on Space Optics), Ajaccio, Corse, France, Oct. 9-12, 2012, paper: ICSO-065, URL: http://congrex.nl/icso/2012/papers/FP_ICSO-065.pdf
41) Arnaud Hélière, Robert Gelsthorpe, Alain Lefebvre, Tobias Wehr, “The EarthCARE High Spectral Resolution Lidar,” Proceedings of the ILRC25 (25th International Laser Radar Conference), St. Petersburg, Russia, July 5-9, 2010
42) João Pereira do Carmo, Arnaud Hélière1, L. Le Hors ,Y. Toulemont, A.Lefebvre, ”ATLID, ESA Atmospheric Lidar Development Status,” EPJ (European Physical Journal) Web of Conferences, Vol. 119, 2016, DOI: 10.1051/ epjconf/201611904003, URL: http://www.epj-conferences.org/articles/epjconf/pdf/2016/14/epjconf_ilrc2016_04003.pdf
43) T. Pain, P. Martimort, P. Tanguy, W. Leibrandt, A. Heliere, ”ATLID: Atmospheric Lidar for Clouds and Aerosol Observation Combined with Radar Sounding,” Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France
44) A. E. Marini, ”ATLID: The Technology Development Programme for ESA’s Satellite-borne Atmospheric Lidar,” ESA Bulletin No 95, Aug. 1998,
45) L. Le Hors, Y. Toulemont, A. Hélière, “Design and Development of the Backscatter Lidar ATLID for EarthCARE,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.icsoconference2008.com/cd/pdf/S15%20-%20Lidars%20-%20Le%20Hors.pdf
46) L. Le Hors, C. Wührer, A. Heliere, ”Concept & Design of the Backscatter Lidar for Earth CARE,” Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France
47) Yannig Durand, Jérôme Caron, Arnaud Hélière, Jean-Loup Bézy, Roland Meynart, “Lidar Technology Developments in Support of ESA Earth Observation Missions,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.icsoconference2008.com/cd/pdf/S15%20-%20Lidars%20-%20Durand.pdf
48) R. Treichel, H.-D. Hoffmann, J. Luttmann, V. Morasch, K. Nicklaus, C. Wührer, “Highly-efficient, frequency-tripled ND:YAG laser for spaceborne lidars,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.icsoconference2008.com/cd/pdf/S17%20-%20Lasers%20-%20Treichel.pdf
49) Albert Ansmann, Ulla Wandinger, Detlef Müller, Eduard Chemyakin, Andreas Petzold, Michael Esselborn, Bernadett Weinzierl, Robert Buras, David P. Donovan, Gerd-Jan van Zadelhoff, Matthias Wiegner, Josef Gasteiger, Bernhard Mayer, Alexei Kolgotin, Dulce Lajas, Tobias Wehr, “Spaceborne Multiwavelength Aerosol HSRL: Feasibility Study in the Framework of ICAROHS,” Proceedings of the ILRC25 (25th International Laser Radar Conference), St. Petersburg, Russia, July 5-9, 2010
50) Frederic Bourgain, Olivier Sosnicki, François Barillot, Frank Claeyssen, Jean Pierre Lelay, Eddie Prevost, Thierry Pain, Benoit Germain, “Beam Steering Mechanism for EarthCARE Atmospheric Lidar Instrument : An Improved Piezoelectric Tip-Tilt Mechanism,” Proceedings of the 15th ESMATS (European Space Mechanisms and Tribology Symposium) 2013, Noordwijk, The Netherlands, Sept. 25-27, 2013, ESA, SP-718, URL: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2013/bourgain.pdf
51) K. Okada, T. Kimura, H. Nakatsuka, Y. Seki, G. Kadosaki, J. Yamaguchi, N. Takahashi, Y. Ohno, H. Horie, K. Sato, “EarthCARE/CPR Design and Verification Status,” Proceedings of SPIE Remote Sensing 2012, 'Sensors, Systems, and Next-Generation Satellites,' Edinburgh, Scotland, UK, Vols. 8531-8539, Sept. 24-27, 2012
52) Hirotaka Nakatsuka, Toshiyoshi Kimura, Nobuhiro Takahashi, Yuich Ohno, Hiroaki Horie, Kenji Sato, Kazuyuki Okada, Jerzy Lemanczyk, Robert Gelsthorpe, Alain Lefebvre, “The EarthCARE Cloud Profiling Radar, Its Design and Status,” Proceedings of the 3rd Workshop on Advanced RF Sensors and Remote Sensing Instruments, Noordwijk, The Netherlands, Sept. 13-15, 2011, URL: http://www.congrex.nl/11c11/ARSI%20papers/Nakatsuka_ARSI2011_Paper_EarthCARE-CPR_Final.pdf
53) T. Kimura, H. Nakatsuka, K. Sato, Y. Sakaide, Y. Seki , K. Okada, N. Takahashi, Y. Ohno , H. Horie, “EarthCARE Mission with Japanese Spaceborne Doppler Cloud Radar,” Proceedings of ISPRS (International Society for Photogrammetry and Remote Sensing) Technical Commission VIII Symposium, Kyoto, Japan, Aug. 9-12, 2010, URL: http://www.tric.u-tokai.ac.jp/ISPRScom8/TC8/TC8_CD/headline/JAXA_Special_Session%20-%204/JTS44_20100210135322.pdf
54) K. Okada, T. Kimura, H. Nakatsuka, K. Sato, Y. Seki, Y. Sakaide, H. Kumagai, N. Takahashi, Y. Ohno, H. Horie, “Development status of Japanese spaceborne cloud profiling radar for EarthCARE mission,” Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites XIV,' Editors: Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, Vol. 7826, paper: 7826-8, Toulouse, France, Sept. 20, 2010, doi: 10.1117/12.866329
55) Kazuyuki Okada, Toshiyoshi Kimura, Hirotaka Nakatsuka, Kenji Sato, Yasuo Sakaide, Nobuhiro Takahashi, “Development Status of the EarthCARE CPR,” URL: http://ams.confex.com/ams/pdfpapers/155494.pdf
56) C. Tinel, C.-C. Lin, J. Testud, F. Ferreira, K. Caillault, E. Caubet, ”Optimization of spaceborne cloud profiling radar vertical and radiometric resolution requirements for resolving highly layered cloud structures,” Proceedings of ERAD 2004 (European Conference on Radar in Meteorology and Hydrology), Visby, Island of Gotland, Sweden, Sept. 6-10, 2004, pp. 545-549, http://www.copernicus.org/erad/2004/online/ERAD04_P_545.pdf
57) Hirotaka Nakatsuka, Kazuyuki Okada, Hiroaki Horie, Toshiyoshi Kimura, Yukie Iida, Masahiro Kojima, Kenji Sato, Yuich Ohno, Nobuhiro Takahashi, Hiroshi Kumagai, “System Design of Cloud Profiling Radar for EarthCARE,” Proceedings of IGARSS 2008 (IEEE International Geoscience & Remote Sensing Symposium), Boston, MA, USA, July 6-11, 2008
58) Toshiyoshi Kimura, Hiroshi Kumagai, “Japanese Cloud Profiling RADAR for EarthCARE,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-n-0
59) T. Orikasa, H. Kuroiwa H. Kumagai, ”Development of Cloud Profiling Radar (CPR) for EarthCARE,” 54th International Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Sept. 29 - Oct. 3, 2003, Bremen, Germany, IAC-03-B.3.02
60) Marcello Gambarara, Marco Cantamessa, Alberto Battisti, Albert Roitman, Richard Dobbs, “EarthCARE Cloud Profiling Radar High Power Transmitter (Main Characteristics and Qualification Test Results),” Proceedings of the 9th European Space Power Conference, Saint Raphael, France, June 6-10, 2011, ESA SP-690
61) Marcello Gambarara, Alberto Battisti, Marco Cantamessa, “EarthCARE Cloud Profiling Radar High Power Amplifier,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.77
62) Y. Ohno, H. Horie, , H. Kumagai, T. Kimura, K. Okada, Y. Iida, M. Kojima; “Development of CPR (Cloud Profiling Radar) for EarthCARE,” EarthCARE Workshop at ESA/ESTEC, Noordwijk, The Netherlands, May 7-9, 2007, URL: http://www.congrex.nl/07c08/presentations%5CSession%20A%20The%20EarthCARE%20Mission%5C02_Kumagai.pdf
63) Pat Foster, Jürgen Hartmann, Hiroaki Horie, Richard Wylde, “Performance Verification of the 94 GHz Quasi-Optical-Feed for EarthCARE’s Cloud Profiling Radar,” Proceedings of the 5th ESA Workshop on Millimeter Wave Technology and Applications & 31st ESA Antenna Workshop, May 18-20, 2009, Noordwijk, The Netherlands, ESA, WPP-300
64) Kyoko Tokunaga, Takashi Komai, Toshiyoshi Kimura, Hirotaka Nakatsuka, Kazuyuki Okada, “Antenna Pattern Testing Results of the EarthCARE/CPR Engineering Model,” Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-n-31
65) Thomas Stute, Hans-Joachim Schödel, Raphael Naire , Jürgen Kienzler , Franz Staab, Nobuhiro Takahashi , Hirohaki Horie, “Structural and Thermal Design for the Quasi Optical Feed of the EarthCARE Cloud Profiling Radar,” Proceedings of the 32nd ESA Antenna Workshop on Antennas for Space Applications, Noordwijk, The Netherlands, Oct. 5-8, 2010, URL: https://web.archive.org/web/20140908140649/http://utopia.duth.gr/~iaitidis/ESA%20conference%202010/Papers/session%2017/FCXNL-10C09-1986011-1-1986011stute.pdf
66) Jürgen Hartmann, Christian Hartwanger, Jürgen Habersack, Hiroaki Horie, “Final design verification of the 94 GHz quasi-optical-feed for EarthCARE's Cloud Profiling Radar by RF Measurements,” Proceedings of the 32nd ESA Antenna Workshop on Antennas for Space Applications, Noordwijk, The Netherlands, Oct. 5-8, 2010, URL: https://web.archive.org/web/20140908140533/http://utopia.duth.gr/~iaitidis/ESA%20conference%202010/Papers/session%2026/FCXNL-10C09-2004848-1-paper_hartmann_2004848.pdf
67) K. Okada, T. Kimura, H. Nakatsuka, K. Sato, Y. Seki, Y. Sakaide, H. Kumagai, N. Takahashi, Y. Ohno, H. Horie, “Development Status of Japanese Space-borne Cloud Profiling Radar for EarthCARE mission,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, 'Sensors, Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, Sept. 20-23, 2010, doi: 10.1117/12.866329
68) Hirotaka Nakatsuka, Kazuyuki Okada, Kenji Sato, Hiroaki Horie, Yuich Ohno, Nobuhiro Takahashi, Toshiyoshi Kimura, “On-orbit Calibration Approach of the EarthCARE/CPR,” Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-n-32
69) Kazuyuki Okada, Toshiyoshi Kimura, Hirotaka Nakatsuka, Yoshihiro Seki, “Environmental Testing Results of the EarthCARE/CPR Engineering Model,” Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-n-30
70) Hiroaki Horie, Yuichi Ohno, Kenji Sato, Katsuhiro Nakagawa, Nobuhiro Takahashi, “Doppler velocity calibration study for Cloud Profiling Radar on EarthCARE,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
71) Dan Lobb, Isabel Escadero, Mark Chang, Sophie Gode, “Development of detailed design concepts for the EarthCARE Multi-Spectral Imager,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.icsoconference2008.com/cd/pdf/S5%20-%20Imagers%20-%20Lobb.pdf
72) M. Durkut, B. de Goeij, J. Leijtens, “Microbolometer Spectrometer MIBS and Test Results,” Proceedings of the International Workshop on Earth Observation Small Satellites for Remote Sensing Applications (EOSS 2007), Kuala Lumpur, Malaysia, Nov. 20-23, 2007
73) J. Leijtens, B. de Goeij, E. van der Meché, M. Eschen, A.Court, “Serious Microsats Need Serious Instruments, MIBS and the First Results,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
74) J. Leijtens, B. de Goeij, E, Boslooper, “MIBS Breadboard Ready for Testing,” Proceedings of the 6th International Conference on Space Optics, ESTEC, Noordwijk, The Netherlands, June 27-30, 2006, (ESA SP-621, June 2006)
75) J. Leijtens, A. Court, “Microbolometer Spectrometer (MIBS) - A Status Update,” Proceedings of the International Symposium OPTRO 2005, Paris, France, May 9-12, 2005
76) Wolfgang von Hoyningen-Huene, Alexander Kokhanovsky, Vladimir Rozanov, John P. Burrows, Gerard Hesselmans, Leslie Gale, Gerrit de Leeuw, “MSI aerosol retrieval algorithm for the Multi-Spectral Imager (MSI) on EarthCARE,” Atmospheric Science Conference Barcelona 07, Spain, Sept. 11,.2009, URL: http://earth.eo.esa.int/workshops/atmos2009/participants/1283/pres_1283_vonHoyningenHuene_ppt.pdf
77) http://blog.sstl.co.uk/archives/366-EarthCARE-MSI-moves-ahead.html
78) Mark Chang, David Woods, Peter Van Wyk, Matt, Price, Mark Skipper, Andrew Barnes, Julie Everett, Nigel Phillips, Guy Baister, Maximilian Sauer, Klaus-Werner Kruse, Bryan de Goeij, Frits van der Knaap, Ellart Meijer, Luud van Riel, Erik Tabak, Jaap van der List, Guus Arkestijn, Dick de Bruijn, Rene Hazelebach, Adriaan van’t Hof, Abelardo Pérez Albiñana, Nick Nelms, “Overview of the EarthCARE Multi-Spectral Imager and Results from the Development of the MSI Engineering Model,” Proceedings of the ICSO (International Conference on Space Optics), Ajaccio, Corse, France, Oct. 9-12, 2012, paper: ICSO-173, URL: http://congrex.nl/icso/2012/papers/FP_ICSO-173.pdf
79) Jonas Bentell, Koen van der Zanden, Thierry Colin, Siegfried Herftijd, Patrick Merken, Jan Vermeiren, “A Comparative Study of the MSI and Proba-V Linear Arrays under the influence of Radiation,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
80) J. Doornink, B. de Goeij, O. Marinescu, E. Meijer, R. Vink, W. van Werkhoven, A. van ‘t Hof, “The Visible, Near-Infrared and Short Wave Infrared Channels of the EarthCARE Multispectral Imager,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%209b/FCXNL-10A02-2009427-1-DOORNINK_ICSO_PAPER.pdf
81) Erik Tabak, Bryan de Goeij, Luud van Riel, Ellart Meijer, Frits van der Knaap, Jan Doornink, Harm-Jan de Graaf, “Design, Building and Testing of a Sun Calibration Mechanism for the MSI-VNS Instrument on EarthCARE,” Proceedings of the 15th ESMATS (European Space Mechanisms and Tribology Symposium) 2013, Noordwijk, The Netherlands, Sept. 25-27, 2013, ESA, SP-718, URL: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2013/tabak.pdf
82) Frits van der Knaap, Bryan de Goeij, Luud van Riel, Erik Tabak, “Mechanical testing on the sun calibration mechanism for the MSI-VNS instrument on EarthCARE,” Proceedings of the13th European Conference on Spacecraft Structures, Materials & Environmental Testing (SSMET), Braunschweig, Germany, April 1-4, 2014, ESA SP-727
83) M. P. J. L. Chang, D. Woods, Guy Baister, Dan Lobb, Trevor Wood, “The EarthCARE Multispectral Imager Thermal Infrared Optical Unit,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%209b/FCXNL-10A02-2017595-1-CHANG_ICSO_PAPER.pdf
84) Luis Gomez Rojas, Mark Chang, Guy Baister, Gordon Hopkinson, Mathew Maher, Matthew Price, Mark Skipper, Trevor Wood, David Woods, “The EarthCARE Multi Spectral Imager Thermal Infrared Optical Unit detection system design,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7826-16, 'Sensors, Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, doi: 10.1117/12.869250
85) D. A. V. Spilling, N. G. Wright, M. Caldwell, A. K. Ward, “The Broadband Radiometer on the EarthCARE Spacecraft,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC–08-B1.3.9
86) https://web.archive.org/web/20160415090649/https://www.sea.co.uk/docs/newsletter/SEA%20NEWS%20SUMMER%2006%20rev%204%207.pdf
87) Ernesto Lopez-Baeza, Carlos Domenech Garcia, Almudena Velazquez Blazquez, Howard W. Barker, Franz. H. Berger, Anne Lorenz, Michel Viollier, Michel Capderou, Patrick Raberanto, Dave Donovan, Marc Bouvet, “Improvement of Angular Dependence Models for the Broadband Radiometer Onboard the ESA EarthCARE Mission,” The EarthCARE Workshop, ESA/ESTEC, Noordwijk, The Netherlands, May 7-9, 2007, URL: http://www.congrex.nl/07c08/presentations%5CSession%20B.4%20Earth%20Radiation%20budget%20satellite%20measurements%5C04_LopezBaeza.pdf
88) Christian Proulx, Fraser Williamson, Martin Allard, Georges Baldenberger, David Gay, Sonia Garcia-Blanco, Patrice Côté, Louis Martin, Carl Larouche, Samir Ilias, Tim Pope, Martin Caldwell, Kim Ward, John Delderfield, “The EarthCARE broadband radiometer detectors,” Proceedings of. SPIE, Volume 7453 , Applications of IR Technologies, August 2009, San Diego, CA, USA, pp. 74530S-74530S-11, doi:10.1117/12.829935
89) Almudena Velazquez, Nicolas Clerbaux, Alessandro Ipe , Luis Gonzalez, Steven Dewitte, Edward Baudrez, Ilse Decoster, Stijn Nevens, Patrick Vandermeulen, Jacqueline E. Russell, Helen Brindley, “Unfiltering Study for the EarthCARE BBR,” ERB Workshop, Paris, France, Sept. 13-16, 2010, URL: http://meghatropiques.ipsl.polytechnique.fr/erb2010/dmdocuments/DAY3/38-ERB_almu.pdf
90) Christian Proulx, Martin Allard, Tim Pope, Bruno Tremblay, Fraser Williamson, John Delderfield, Dave Parker, “EarthCARE BBR detectors performance characterization,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7826-62, Sensors, 'Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, doi: 10.1117/12.868518
91) C. Proulx, M. Allard, T. Pope, B. Tremblay, F. Williamson, C. Julien, C. Larouche, J. Delderfield, D. Parker, Performance Characterization of the EarthCARE BBR Detectors,” ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010, URL: http://congrex.nl/ICSO/Papers/Session%202a/FCXNL-10A02-1985139-1-proulx_icso_paper.pdf
92) G Munro, M Hampson, M Humphries, S. Lewis, “Design and development of the EarthCARE Broadband Radiometer Mechanism Assembly,” Proceedings of the 14th European Space Mechanisms & Tribology Symposium – ESMATS 2011, Constance, Germany, Sept. 28–30 2011 (ESA SP-698)
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002.