DST (Dobson Space Telescope)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
DST (Dobson Space Telescope)
DST is a research project of the Institute of Aeronautics and Astronautics (ILR) at the Technical University of Berlin (TUB), Germany. The overall objective is to introduce and demonstrate enabling technologies such as high-resolution (1 m GSD) Earth imaging from an orbital altitude of 550 km using the rather limited payload volume and mass of a microsatellite. This is done by employing a completely new type of self-deploying and self-collimating telescope system. During the launch phase, the DST instrument is stored in a small box; a foldable optics system design with an aperture diameter of 50 cm is required to accomplish this feat.
In the framework of this project, a strategic alliance between TUB and Astro- und Feinwerktechnik Adlershof GmbH (referred to as “Astrofein”), a SME (Small and Medium Enterprise) in the space field was formed. Astrofein is a major player of the “Raumfahrt Initiative Berlin Brandenburg (RiBB),” a consortium of the companies that built the DLR BIRD microsatellite. As of 2007, the RiBB members comprise a network of small satellite companies in Germany's capital region, representing a valuable talent pool in their fields of expertise. The German Ministry of Economics and Technology (BMWi) is supporting the RiBB effort to foster high-technology start-ups from universities like the newly founded DST GmbH i.V., a spin-off company of the TUB/ILR to commercialize the results of DST technology. 1) 2) 3) 4) 5) 6)
The design strategy of deployable high-resolution optics for small satellites has several advantages compared to solid telescopes: foldable telescopes with the same aperture are much lighter (up to 50%), and the needed volume during launch is also dramatically reduced (up to 70%); and since they are collimated in space, there is no risk of loosing collimation during launch. This technology enables a satellite of the 100 kg class (microsatellite) to carry a telescope with a 50 cm f/8 RC (Ritchey/Chretien) optics system. The DST team selected the design of a foldable truss concept in which the optical bench is folded; the mirrors and FPA (Focal Plane Assembly) are fixed. Depending on the size of the satellite, this technology is suitable for any aperture ranging from about 30 cm to 2 m in primary mirror diameter. The design concept has the potential of considerable cost reductions in launch mass for imaging applications.
The DST project started in Nov. 2002 as part of a lecture series on satellite design at TUB; the concept was first presented in 2003. Later on, the deployable truss telescope concept - risks and benefits - were further evaluated within the framework of an ESA GSP (General Studies Program) contract. To demonstrate the feasibility of the critical technologies - deployment and collimation (i.e. automatic optical alignment of the telescope in space) - two separated test benches were built.
The telescope folding mechanism itself employs a robust design concept based on trusses and hinges. Baffles are being used in the deployment process to address all aspects of stray light. In addition, a fine precision mechanism is being used behind the secondary mirror of the telescope to permit alignment in space. The overall concept was derived from the space-proven design of the DSP (Double Star Program) booms which were built in Berlin by industry partners of TUB.
The deployment test bench itself was successfully flown on an ESA parabolic flight campaign in July 2005. The DST deployment mechanism was patented - the patent was granted on June 1, 2007 by the German Patent Office.
Background on the telescope name: John Dobson (born 1915 in Beijing, China) is an American hobby astronomer (a chemist by profession) and an inspirational teacher of cosmology and telescope-making classes. Dobson built his first telescope in 1956 using spare parts from everywhere. He is best known for developing hand-on methods for making inexpensive telescopes that rival the quality and size of those used in professional observatories. John Dobson was also a co-founder of “Sidewalk Astronomers” in 1968 to give the public of San Francisco (and later in many other places) a look at the wonders in the sky. John Dobson's life has been a tremendous inspiration to a great many people.
The Dobson Space Telescope is named to honor the basic idea of John Dobson - that by using imagination and the proper technologies, inexpensive space telescopes can compete with large ones.

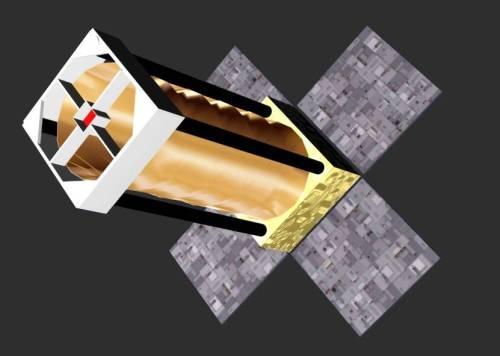
Legend: Figure 1 illustrates the conceptual deployment sequence of DST staring from left with: a) launch configuration, b) solar array deployment, c) telescope deployment, and d) in-orbit collimation.
DST Testbed and Engineering Model
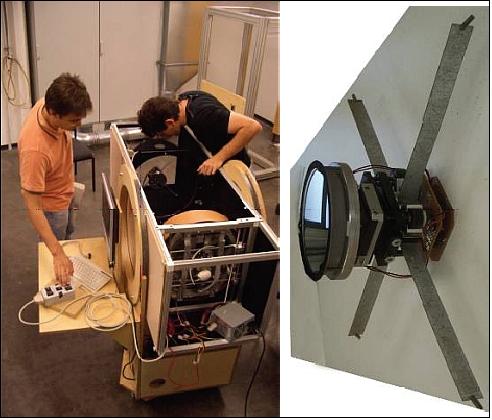
A dedicated collimation testbed was built in the fall of 2004 (Figure 2) at TUB to demonstrate and verify the collimation procedure independently from the deployment mechanism, using a 35 cm aperture f/9 Cassegrain telescope for the demonstration (referred to as DST 35). The intent was to simulate the deployment alignment errors which were also measured in the deployment testbed as well as in the parabolic test flight of ESA.
The alignment design of the testbed employed active optics to simulate misalignment errors which could be corrected in 6 degrees-of-freedom using actuators with the corresponding telescope alignment algorithms. The active optics consisted of a precision mechanism placed behind the secondary mirror. Using a star image and/ or a reference measurement point inside the telescope the active optics testbed was able to align the telescope precisely.
Naturally, the alignment mechanism can also be used to adjust any misalignment that may have incurred to the optics system after in-orbit deployment (to compensate any degradation of the optical performance).
An engineering model of the DST is under development as of late 2007. Together with its partners, TUB/ILR plans to develop DST and aims for an in-orbit demonstration in the time frame 2010.
Payload requirements | ||
Parameter | DST 35 | DST 50 |
Telescope | 350 mm RC f/8 + corrector lens | 500 mm RC f/8 + corrector lens |
Resolution (Pan/MS) | 1.5 m / 6 m | 1 m / 4 m |
FOV (Field of View) | 1,87º | 1.20º |
Swath width (550 km orbital altitude) | 12-18 km with 8-12 kpixel | 8-12 km with 8-12 kpixel |
Camera channels | Customer specification (e.g. TDI system with 5 channels VIS/NIR Landsat Spec) | |
Payload mass | < 20 kg electronics inclusive | 32 kg electronics inclusive |
Instrument size | 400 x 400 x 250 mm folded | 600 x 600 x 300 mm folded |
Active optics | Yes, 6 axis | |
Bus requirements | ||
Pointing accuracy | 2 arcmin | 1 arcmin |
Jitter performance | 0.185 arcmin/s | 0.125 arcmin/s |
Data downlink | 10-50Mbit/s | 150 Mbit/s |
Power consumption | 20 W average | 30 W average |
Target mission | Low-cost demonstration | Commercial EO |
Suitable satellite bus | e.g. TUBSat, | e.g. DLR BIRD/TET, OHB |
Spacecraft
The spacecraft bus is of BIRD and TUBSAT-C (i.e., DLR-TUBSAT) mission heritage. The bus requirements call for a payload mass of 35 kg (40 kg max, including FPU) with a payload volume of 46 cm x 46 cm x 25 cm and a payload power of 32 W. In addition, 3-axis stabilization is needed with an ACS (Attitude Control Subsystem) pointing accuracy of ±2 arcsec (knowledge) and a jitter of ±0.125 arcsec/s (max).
Launch
A launch of DST 35 is planned for 2012.
RF communications: The downlink is in X-band at a data rate of 150 Mbit/s. Onboard data compression is being employed prior to image storage.
Sensor Complement
DST (Dobson Space Telescope). The DST design employs the concepts of a simple “on-axis, two-mirror, and two-lens corrector system. Although this architecture limits to some extent the optical performance with regard to maximum swath width, MTF (Modulation Transfer Function) degradation (due to central obstruction), and the introduction of stray light problems, it is considered the only way to have a low-cost deployable space telescope. Also, a less complex telescope design is much more stable and easier to collimate (note: a collimated wavefront of light exhibits a highly parallel behavior in an optics system).
Collimation actuators: The actuators are designed to collimate the telescope after structural truss deployment of the folded optics system. They are able to reduce the misalignment errors of the optics system from about 1 mm, due to the inaccuracies of the boom deployment mechanism, to about 1 µm, required for proper telescope observations. - The collimation procedure can be performed at any time during the mission. This is a huge advantage to classical solid telescopes without collimation actuators. Due to its active optics the telescope can be used in a much wider temperature range. This in turn reduces both, the requirements for thermal stability (reduced engineering cost), and it prohibits unwanted loss of alignment during the mission which is a severe threat to any structural alignment.
DST 8 Development on a CubeSat Platform
As of 2007, an even smaller DST development was started, based on the same folding technology concept as validated for the microsatellite class - but transposed into the configuration of a CubeSat class picosatellite. This new approach was started due to the considerable interest by the university EO (Earth Observation) communities. An early spaceborne test of the folding concept represents also an important technology validation for the DST mission on a microsatellite.
Hence, the objective is to implement the DST (Dobson Space Telescope) technology on a CubeSat of 1 kg mass to provide an imagery of 6 m spatial resolution. Although it would be no problem to implement a pushbroom imager in the DST 8 design, a frame imager has been chosen for snapshot imagery; this concept offers lower pointing requirements for the platform than a pushbroom system. Secondly, the pushbroom data rate would be way to high for typical CubeSat downlink rates (9,6kbit/s). 7)
Telescope | 80 mm aperture diameter with a RC (Ritchey/Chretien) optics system |
Spatial resolution @ 600 km altitude | 6 m |
FOV (Field of View) | up to 10 km (swath width) |
Spectral channels | RGB (Red, Green, Blue) |
Instrument size | Folded: 100 mm x 100 mm x 60 mm |
Instrument mass | < 0.5 kg including the electronics unit |
Instrument power | < 0.5 W (peak) |
As of early 2008, the EM (Engineering Model) is in the assembly state. The FM (Flight Model) is expected to be available by 2009.
Launch: A launch of the DST 8 CubeSat is planned for 2010.
References
1) T. Segert, B. Danziger, M. Lieder, “Dobson Space Telescope, Recent Developments,” Proceedings of 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.4.08
2) T. Segert, B. Danziger, M. Lieder, “Dobson Space Telescope - The Next Step in Space Optic Design,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.P.09
3) https://web.archive.org/web/20100413142022/http://www.dobson-space-telescope.com/
4) T. Segert, “Dobson Space Telescope: A Successful example for Hands on Education,” STEC (Space Technology Education Conference) 2005, April 6-8, 2005, Aalborg University, Aalborg, Denmark
5) T. Segert, B. Danziger, M. Lieder, “Dobson Space Telescope - The Future of Microsat Based Observation,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation,” Berlin, Germany, April 4-8, 2005
6) T. Segert, K. Briess, B. Danziger, “Dobson Space Telescope: A unique payload to enable 1 m resolution on 100 kg satellites,” Proceedings of the International Workshop on Earth Observation Small Satellites for Remote Sensing Applications (EOSS 2007), Kuala Lumpur, Malaysia, Nov. 20-23, 2007
7) Information was provided by Tom Segert of DST GmbH i.V., Berlin
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).