DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite)
EO
CNES
DORIS-NG
DORIS (SPOT)
Quick facts
Overview
| Mission type | EO |
| Agency | CNES |
| Launch date | 22 Jan 1990 |
| Instruments | DORIS-NG, DORIS (SPOT) |
| CEOS EO Handbook | See DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite) summary |
DORIS Tracking System
DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite) is a microwave tracking system, an uplink radio system based on the Doppler principle, requiring a host satellite (for the space segment package) and a global network of ground-based tracking stations. The prime objective is to provide precise measurements for POD (Precise Orbit Determination) services and geodesy applications. The system concept is based on accurate measurements of the Doppler shifts on a radiofrequency signal transmitted by ground stations and received on-board orbiting satellites, carrying DORIS receivers, when they are in visibility of a station. The number of DORIS carrier satellites is unlimited. The measurements and on-board products provided by the DORIS receivers can be used in the following applications:
• POD support for altimetry and other missions
• Orbit control (either on-board or on ground)
• Ground beacon positioning
• Geophysical modelling (Earth gravity field, atmosphere, ionosphere, Earth pole motion monitoring, etc.)
• Integrity control of the DORIS system.
The DORIS system has been designed and optimized by CNES, IGN (Institut Géographique National), and GRGS (Groupe de Recherches en Géodésie Spatiale) to perform high precision orbit determination and beacon positioning. DORIS was initially developed in the framework of the TOPEX/POSEIDON oceanographic altimetry mission. DORIS has been operated since 1990, when the first technology demonstration system (prototype payload) was launched on board the SPOT-2 spacecraft. In the meantime, DORIS has evolved over a long period to become a very efficient system with a high level of integrity. 1) 2) 3) 4) 5) 6) 7) 8)
Mission | Launch Date | Services introduced |
SPOT-2 (CNES) | Jan. 22, 1990 | Start of 1st generation receiver (18 kg), a bi-frequency system in 1 channel |
TOPEX/Poseidon | Aug. 10, 1992 |
|
SPOT-3 (CNES) | Sept. 26, 1993 |
|
SPOT-4 (CNES) | March 24, 1998 | Introduction of experimental DIODE software package providing a real-time processing capability for S/C navigation |
Envisat (ESA) | March 01, 2002 | - Start of 2nd generation receiver (11 kg), a bi-frequency system in 2 channels; - Improved DIODE version with Earth's gravity model and sun / moon attractions |
Jason-1 (NASA/CNES) | Dec. 07, 2001 | Introduction of miniaturized 2nd generation receiver (5.6 kg), a bi-frequency system in 2 channels |
SPOT-5 (CNES) | May 04, 2002 | 2nd generation miniaturized receiver |
CryoSat (ESA) | Oct. 08, 2005 launch failure of S/C | - DIODE added another feature: inertial J2000 on-board position and velocity bulletins to be used by the AOCS |
Jason 2 (NASA/CNES, NOAA, EUMETSAT) | June 20, 2008 | - DGxx version receivers: 8 channels based on DIODE directives for beacons signals acquisition |
CryoSat-2 (ESA) | April 8, 2010 | - Real-time orbit determination for spacecraft attitude and orbit control (on-board) |
HY-2 (Haiyang-2), (CNSA) | Aug. 15, 2011 |
|
Pléiades (CNES) two spacecraft | Dec. 17, 2011 | HR1: An autonomous orbit determination is performed by a DORIS receiver |
SARAL (ISRO/CNES) with AltiKa | 2012 |
|
Sentinel-3A (GMES), ESA | 2013 |
|
Jason-3 (Eumetsat, NOAA, CNES) | 2014 |
|
Parameter | 1st generation | 2nd generation | 2nd generation miniaturized |
Missions | SPOT-2, -3, TOPEX/Poseidon, SPOT-4 | Envisat | Jason-1, Spot-5 |
Precise orbit | ≤ 3 cm / radial (observed) | ≤ 3 cm / radial (specification) | ≤ 3 cm / radial (specification) |
Real-time orbit determination | 5 m / 3 axis (SPOT-4) (observed) | 1 m / 3 axis (specification) | 30 cm / radial, 1 m others (specification) |
Time accuracy | 3 µs (observed) | 3 µs (specification) | 3 µs (specification) |
Sensor Complement
The on-board DORIS receiver, developed by TAS (Thales Airborne Systems), Elancourt, France receives the signals of the DORIS ground network through two RF chains (amplifiers, filters, mixers) at the frequencies: f1 = 2036.25 MHz, and f2 = 401.25 MHz. For the signal acquisition and precise tracking, the receiver includes a seven channel processing system. Each channel is in charge of a single beacon signal, and includes a third order phase lock loops, which provides an excellent phase tracking, along with a minimal phase lag in case of rapid Doppler frequency changes.
Measurement principle: The on-board receiver measures the Doppler shift (i.e. phase and delta phase measurements) of the `uplink beacons' in two frequencies, which are transmitted continuously by the DORIS ground network of stations. One measurement is used to determine the radial velocity between spacecraft and beacon, the other to eliminate errors due to ionospheric propagation delays. Orbit determinations with a precision of < 5 cm on the radial distance component are achieved on the TOPEX/Poseidon mission. When expressed in radial velocity, the delta phase measurements are designed to have a noise < 0.3 mm/s.
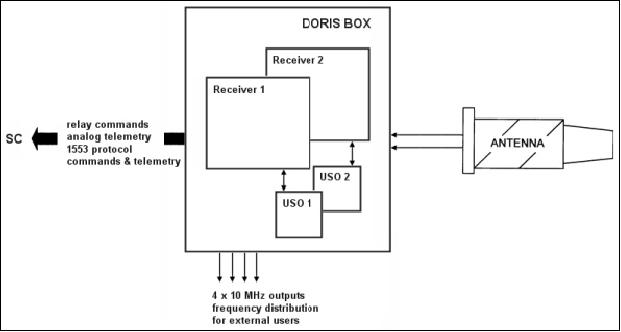
All the receiver operation (clocks and local oscillators) is derived from the internal 10 MHz USO (Ultra Stable Oscillator) which provides the overall instrument phase and frequency stability. The on-board USO is provided by the C-MAC company, Argenteuil.
Auxiliary data from the beacon (the beacon message) is also received. Those messages allow a time-tagging measurement which is performed by measuring the on-board date of the reception of a specific event (the raising edge of the first zero in the synchronization message). This time-tagging measurement has an accuracy of a few microseconds (µs).
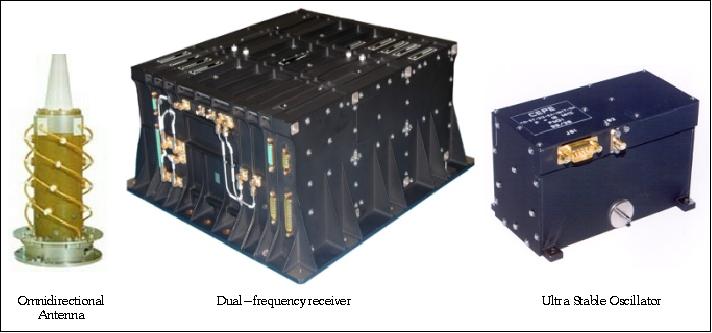
The DORIS on-board package includes:
• Two redundant processing chains, performing Doppler measurements and receiving auxiliary data from the beacons
• A fixed dual-frequency omni-directional antenna
• A USO delivering the reference frequency with a specified stability of < 5 x 10-13 over periods from 10 to 100 seconds.
DORIS measures the relative velocity between a dense, permanent beacon network, and an unlimited number of on-board packages, flying on different carrier satellites. The location of the orbit determination beacons is precisely linked to the ITRF (International Terrestrial Reference Frame) to get absolute positioning.
Once gathered and elaborated, DORIS data may then be used :
• To perform on-board, real-time orbit determination (autonomous navigation)
• To support ground-segment functions such as: precise orbit determination, precise beacon positioning, atmosphere modelling, and Earth gravity modelling.
High precision Doppler measurements and on-board navigation | - provides elementary velocity measurements with an accuracy better than 0.3 mm/s |
Beacon tracking capability | Up to 7 beacons simultaneously (7 dual frequency channels) |
Autonomous operation | - routine high precision navigation mode reached autonomously |
Power supply | 22 - 37 VDC, 23 W typical; 30 W at warm up, less than 2 hr |
Telemetry/telecommand interface | - MIL-STD-1553 / CCSDS packet terminal protocol |
10 MHz reference signal distribution | - high stability |
On board time tagging capacity | - external pulse time tagging capacity or pps distribution |
CPU/software | - radiation tolerant design with SPARC ERC32 processor and memory fault detection and recovery |
Instrument mass, power, size | 16 kg, 24 W, 390 mm x 370 mm x 165 mm; for the redundant DGxx (new generation receivers) configuration including two USOs which are now packaged inside the receiver |
Measurement frequency |
|
Position accuracy |
|
Velocity Accuracy |
|
Operation | Continuously over full orbit |
Data rate | 16.7 kbit/s |
System Upgrades
Several generations of DORIS instruments have been developed, each compatible with the station network. The two features that all instruments share are a measurement acquisition every 10 seconds and the dual-frequency system. Miniaturization of electronic circuitry has allowed to include in the current DORIS box two receivers each having 7 bi-frequency channels and two USOs.9)
• 1st generation system: Only one beacon can be received by the space segment at any time. The first generation DORIS instruments have flown (or are being flown) on the following missions: SPOT-2, TOPEX/Poseidon, SPOT-3 and SPOT-4.
• 2nd generation system: The receiver is able to receive two beacons simultaneously. Second generation instruments are being flown on: Envisat, Jason-1, and SPOT-5.
• 3rd generation beacon: Frequency shift : + 50 kHz / 2GHz , + 10 kHz / 400 MHz; beacon modulation (beacon message and synchronization word) transmitted on both 400 MHz & 2 GHz signals; broadcasting of current TAI date (LSB 10 seconds). The third generation DORIS instruments, named “DGxx receivers”, are planned for the missions: Jason-2, SARAL, CryoSat-2, and HY-2.
DIODE (Doris Immediate Orbit Determination)
DIODE is a CNES-developed DORIS on-board software package first introduced on SPOT-4, and realized in an electronic card of the DORIS receiver. The size of this DIODE version is about 2500 lines (44 kB). The program is operating on a separate MIL STD 1750A-type processor. The receiver management software is written in assembly code and operates on a 8086 processor. Successful on¿board orbit determination has been demonstrated/validated with DIODE on SPOT-4, in more than three years of operations. - Improved versions of DIODE are implemented on Jason-1, Envisat, and on SPOT-5.
DIODE processing on Jason-1 is based on Kalman filter techniques. Numerical integration is employed to propagate the state vector every ten seconds. In addition, the Doppler measurements are processed, provided by the DORIS receiver to correct its state vector.
SPOT-4 demonstration version and features of DIODE.
- Accuracy: Specifications were 200 m in 3D. The observed accuracy is around 5 m rms
- Autonomy: A few uploads per year are necessary to update DIODE data (new beacons in the network, maneuvers, TAI-UTC leap). For instance, between March 1998 and June 1999, only 15 data uploads have been sent.
- Availability: During the first year, the software has properly worked 363 days over 365, in translates into an availability of 99.5%. This ratio has also been confirmed during second and third years of S/C operations. Five restarts only were necessary since March 24, 1998, three of them being due to an external cause (DORIS receiver re-initialization for instance).
- Robustness: DIODE has handled an 8 km semi-major axis raising maneuver, with errors < 50 m.
- Utility: Since March 1998, almost every Spot-4 image has been rectified with DIODE results. Since June 1999, the VEGETATION instrument on Spot-4 also uses DIODE. In addition, the POAM-III (Polar Ozone and Aerosol Measurement) instrument of NRL uses DIODE positions to point its optical terminal.
New features of DIODE for upcoming missions (2nd generation):
• The DORIS receiver measurment technique has changed: “phase measurements” are being performed now instead of “Doppler measurements.”
• Autonomous initialization and synchronization. Beginning with Jason-1 and Spot-5, the on-board receivers are able to perform self-synchronization and self-initialization; the new 3.0 beacons contain the TAI time in their data stream, and the on-board receivers are using this information to synchronize their clock. This functional package permits the receivers to acquire measurements, to ask DIODE to process them, and perform self-programming - without any human intervention.
• Upload broadcasts: The control center is able to broadcast its uploads on the master beacons. They contain information on time/frequency and position of the DORIS beacons.
Ground Segment
The ground segment is comprised of the following elements:
• A beacon installation and management center at IGN coordinating the global network of orbit determination beacons (ODB)
• The SSALTO (Segment Sol Altimetrie et Orbitographie) multimission control center is operated by CLS (Collecte Localisation Satellites - a CNES subsidiary with HQ in Toulouse, France) on behalf of CNES. The satellites with a DORIS payload relay acquired and stored data at regular intervals to SSALTO. This center keeps a check on station operations, processes measurements, calculates the orbit of the satellites carrying the DORIS instrument, and archives and distributes data.
• POD (Precision Orbit Determination) computational services are performed by CNES. The Earth's gravitational field computation is provided by GRGS on the basis of DORIS data.
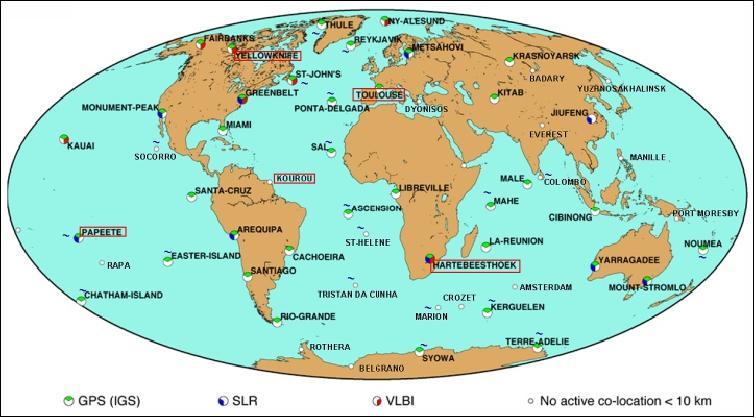
The ODB (Orbit Determination Beacon) network is distributed fairly homogeneously over the surface of Earth. It is managed and maintained by SIMB (DORIS Beacon Installation and Maintenance Service), of IGN. As of 2007, the ground beacon network includes around 60 permanent beacon sites hosted by institutes of more than 30 different countries. More than 20 beacon sites are collocated with other precise positioning techniques:VLBI (Very Long Baseline Interferometry), SLR (Satellite Laser Ranging), and GPS (Global Positioning System) to allow intercalibration.

Each beacon site is equipped with the following elements:
• A bi-frequency 400 MHz and 2 GHz transmitter, including a USO (Ultra Stable Oscillator). Both signals are modulated to send messages containing an ID number, timing information, data from the meteorological sensors, and engineering data (power, etc.).
• An omni-directional bi-frequency antenna
• A microprocessor performing the necessary control and management functions, transmission of timing, housekeeping and failure diagnosis
• A metrological sensor package providing temperature, pressure and humidity measurements, used for tropospheric corrections.
There are three master beacon sites - able to upload commands to the instrument: Toulouse, Kourou, and Hartebeetshoek. The master beacon sites are tied to an atomic clock, enabling synchronization of the DORIS system with TAI (International Reference Time).
Another class of beacons is termed Ground Location Beacons (GLBs). These are used at location sites that are either unknown or not known to sufficient accuracy. GLBs use the results of high-precision orbit determination as input for the precise determination of ground positions. GLBs are functionally identical to ODBs. GLBs are also used by the scientific community to monitor and track:
• Tectonic plate motions of the order of a few cm/ year
• Vertical ground displacements caused by deformations of the Earth's crust
• The Earth's geocenter motion
• Shifts in the Earth's rotation axis.
Data gathering duration | Accuracy (1 satellite) | Accuracy (2 satellites) |
1 hour | 1 m | 50 cm |
1 day | 20 cm | 15 cm |
5 days | 10 cm | 7 cm |
26 days | 3 cm | 1-2 cm |
Background: The planning for the DORIS system started in 1983 by CNES, IGN and GRGS.
The deployment of the DORIS ground network started in 1986 under the direction of IGN (Institut Géographique National), the French national survey agency. The network had 32 stations when the first DORIS receiver was launched on SPOT-2 in January 1990, and the initial objective of roughly 50 stations worldwide was reached by the end of 1993. From then on, installations of new stations have been going on at a slower pace. In September 1999, the number of stations was up to 54, with the latest addition at St. John's (Newfoundland, Canada). As of 2007, there are close to 60 ground stations. 10) 11)
The ground stations in the various countries are generally hosted by the following institutions: National survey organizations; space agencies; institutes of astronomy, geophysics, or oceanography; universities; telecommunication stations; and meteorological stations.
• Since 1994 and thanks to its more than fifty permanent beacon network, DORIS contributes to the IERS (International Earth Reference System) activities for the realization and maintenance of the ITRS (International Terrestrial Reference System). 3D positions and velocities of the reference sites at a cm and mm/year accuracy lead to scientific studies (investigations) in the fields of global and regional tectonics. Two recent DORIS results appear very encouraging for the future. One concerns a seasonal effect of earth surface fluid mass redistribution (oceanic water, atmospheric masses, snow, etc.) on the relative positions of the earth mass and earth figure centers. Another concerns vertical displacement of the crust monitored near tides-gages. This information is of major interest for the topic of sea level variations and correlation to the Global Change.
• IDS (International DORIS Service). The IDS service started on July 1, 2003 as an IAG (International Association of Geodesy) service after the decision of the IAG Executive Committee at the IUGG General Assembly in Sapporo, Japan. The IDS service provides a support through DORIS data and products, to geodetic, geophysical, and other research and operational activities. 12) 13)
The quality, density and homogeneity of the DORIS network have continuously improved throughout its 20 year evolution. Since its maiden mission in 1990, DORIS has acquired over 50 million measurements for the international scientific community.
References
1) B. Besson, C. Jayles, “DORIS instrument and system: description and performance,” Proceedings of the Advanced RF Sensors for Earth Observation 2006 (ASRI), Workshop on RF and Microwave Systems, Instruments & Sub-Systems, ESA7ESTEC, Noordwijk, The Netherlands, Dec. 5-6, 2006
2) C. Jayles, B. Nhun-Fat, C. Tourain, “DORIS: System Description and Control of the Signal Integrity,” Journal of Geodesy, Vol. 80, No 8-11, Nov. 2006
3) M. Costes, C. Jayles, “Ten Centimeter Orbits in Real-time On-board of a Satellite: DORIS-DIODE, Current Status,” Proceedings of the 52nd IAC, Oct. 1-5, 2001, Toulouse, France, IAF-2001-A.6.03
4) C. Jayles, F. Rozo, “On-board Orbit Computation with DORIS-DIODE: From Experiment to Operational Use,” 16th International Symposium on Space Flight Dynamics, Dec. 3-7, 2001, JPL, Pasadena, CA
5) http://smsc.cnes.fr/DORIS/GP_systeme.htm
6) G. Travernier, J. P. Granier, C. Jayles, P. Sengenes, F. Rozo, “DORIS, present and future,” IDS Analysis Workshop, Marne La Vallée, France, Feb. 20-21, 2003, URL: http://ids.cls.fr/documents/report/ids_workshop_2003/Tavernier_Feb03.pdf
7) D. Dassaud, A. Auriol, B. Besson, C. Jayles, P. Raizonville, M. Bouchet, “DORIS Instrument and System: Description and Performance,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B2.1.08
8) http://www.aviso.oceanobs.com/en/doris/index.html
9) P. Sengenes, G. Tavernier, J. P. Granier, “A Brief Overview of DORIS System Evolutions,” IDS DORIS Workshop, June 13-14, 2002, Biarritz, France, URL: http://ids.cls.fr/documents/report/ids_workshop_2002/PS_DORIS_IDS2002.pdf
10) H. Fagard, “Twenty years of evolution for the DORIS permanent network: from its initial deployment to its renovation,” Journal of Geodesy, Vol. 80, No 8-11, Nov. 2006, pp. 429-456, DOI 10.1007/s00190-006-0084-2
11) H. Fagard, A. Orsini, “Current status and evolution prospects of the DORIS network,” 2000, URL: http://ids.cls.fr/documents/report/doris_days_2000/fagard.pdf
12) “International DORIS Service,” URL: http://ids.cls.fr/
13) Pascal Willis, “International DORIS Service (IDS),” Report of the International Association of Geodesy 2007-2009, URL: http://iag.dgfi.badw.de/fileadmin/IAG-docs/Travaux2009/Travaux_IDS.pdf