DMC-3 (Disaster Monitoring Constellation-3)
EO
Imaging multi-spectral radiometers (vis/IR)
High resolution optical imagers
Land
Launched in July 2015, DMC-3 (Disaster Monitoring Constellation-3) is a constellation of three optical imagers owned and operated by DMCii (DMC International Imaging Ltd.). With a usage model of leasing its data capacity to other users and clients around the world, it enables high-resolution Earth observation data to be made readily available to a large audience. The constellation has a design life of seven years.
Quick facts
Overview
| Mission type | EO |
| Agency | UKSA, 21AT, NRSCC |
| Mission status | Operational (extended) |
| Launch date | 10 Jul 2015 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Albedo and reflectance |
| Measurement detailed | Land surface imagery, Earth surface albedo |
| Instruments | MSI (BJ-2), PAN (BJ-2) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers |
| CEOS EO Handbook | See DMC-3 (Disaster Monitoring Constellation-3) summary |

Summary
Mission Capabilities
All three satellites carry a single identical instrument: a pushbroom imager, SSTL-300 S1 (Surrey Satellite Technology Ltd.-300) which utilises panchromatic and multispectral bands for imagery, with specific use for disaster management and monitoring, as well as general Earth observation.
Performance Specifications
The satellites have a spatial resolution of 1 m of ground sample distance (GSD) for the panchromatic band and a resolution of 4 m GSD for the multispectral bands. The multispectral band has a spectral resolution of four bands, and each satellite has a swath width of 23 km.
DMC-3 operates in a sun-synchronous orbit at an altitude of 651 km and an inclination of 97.8°. The three spacecraft are evenly spaced out at 120° apart in the same orbital plane, with a daily revisit time.
Space and Hardware Components
DMC-3 utilises the SSTL-300 S1 satellite bus, a further development of the SSTL-300 bus used on NigeriaSat-2. DMC-3 uses an EPS (Electrical Power Subsystem), an ADCS (Attitude Determination and Control Subsystem) and an OBC (On-board computer).
EPS utilises body-mounted solar panels on the satellite platform, which delivers power to an onboard 15 Ahr battery. ADCS uses sun sensors and magnetometers for coarse attitude knowledge and uses Procyon star trackers for high-accuracy three-axis orientation data. OBC is used to receive and process commands from the ground and can control all satellite subsystems.
DMC-3 (Disaster Monitoring Constellation-3) / TripleSat Constellation of 21AT / Beijing-2
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
In 2011, SSTL (Surrey Satellite Technology Ltd.) is building a new high-resolution satellite constellation, DMC-3 , a three spacecraft optical imaging constellation to be owned and operated by DMCii (DMC International Imaging Ltd.) of Guildford, Surrey, UK. DMCii is a subsidiary of SSTL, the world leader in small satellite technology. The objective of this innovative commercial DMCii service model is to lease capacity of these spacecraft - the service will provide daily access opportunities to anywhere in the world. 1)
The first data customer to this DMCii service model is the Chinese company 21AT (Twenty First Century Aerospace Technology Company Ltd.) of Beijing, China. The contract between 21AT and DMCii was signed in June 2011 in London during the Chinese premier's UK visit. 21AT will lease from DMCii 100% of the imaging capacity of the three high resolution satellites under a seven-year contract and SSTL will design the satellite constellation to meet the Earth Observation requirements of 21AT. 2) 3) 4) 5)
In return 21AT will receive timely, high resolution (1.0 m GSD Pan and 3 m MS data) satellite imagery with planning and tasking but without the complexity associated with procuring and operating a satellite constellation. A launch of the DMC-3 constellation is planned for 2014.
21AT is no stranger to SSTL, having built its business in selling imagery from its very successful small satellite mission Beijing-1 which was manufactured by SSTL and launched in 2005. Beijing-1 has been used extensively by 21AT to provide EO information services over the last 5 years, primarily to the Chinese government, for applications such as monitoring land and water resources, agriculture, urban development, desertification, earthquake and snow disasters, pollution, and environmental impact assessment.
Most notably, its images played a vital role in assessing remote and inaccessible areas during the Wenchuan earthquake (May 12, 2008 in the Sichuan province of China, killing an estimated 68,000 people), and in planning infrastructure for the Beijing Olympics in 2008. Beijing-1 is still operating in orbit, surpassing its 5-year design lifetime on 27 October 2010. The satellite is expected to continue operating for 21AT until DMCii fulfils capacity needs through the new constellation.
By leasing capacity from the three new satellites in the DMC-3 constellation, 21AT will meet growing demand for high-resolution image data and value-added EO (Earth Observation) geo-information services from its established user community. It is anticipated that more satellites will be added to the constellation as additional capacity is required for DMCii's international customer base and other early adopters of this unique service model.
Some background: 21AT refers to the DMC-3 constellation as TripleSat Constellation. Twenty First Century Aerospace Technology Co. Ltd. is the first and only Earth Observation commercial satellite operator in China. With headquarters in Beijing, 21AT employs more than 300 people and has been providing remote sensing applications in China since the launch of its first satellite, Beijing-1, in 2005. Beijing-1 was one of five satellites in the Disaster Monitoring Constellation providing disaster response through an International Charter. Based on the success of Beijing-1, 21AT has acquired the new capability of three 1-metre satellites in a constellation for imagery data services. 21AT will provide in-depth application support from its comprehensive value added services and create business opportunities for worldwide partners through its operational monitoring services powered by the TripleSat Constellation. 21AT (Asia) in Singapore has been established to support streamlined access to the worldwide market.
General operational service concept of DMC-3
• Two options for participation:
- Lease capacity from existing constellation
- Contribute a satellite, and benefit from use of the entire constellation
• Using Disaster Monitoring Constellation experience to operate a high resolution constellation
• Highly flexible setup, tailored to customer needs
• Tasking from sovereign or other ground stations
• Benefits of a constellation for a fraction of the price
Mission | Customer | Platform | Launch | GSD | Swath width | Mission status |
Alsat-1 | CNTS (Algeria) | SSTL-100 | 2002 | 32 m MS | 650 km | Completed |
BilSat | Tubitak (Turkey) | SSTL-100 | 2003 | 32 m MS | 650 km | Completed |
NigeriaSat-1 | NASRDA (Nigeria) | SSTL-100 | 2003 | 32 m MS | 650 km | Completed |
UK-DMC-1 |
| SSTL-100 | 2003 | 32 m MS | 650 km | Completed |
Beijing-1 |
| SSTL-150 | 2005 | 32 m MS | 650 km | Operational |
UK-DMC-2 |
| SSTL-100 | 2009 | 22 m MS | 650 km | Operational |
Deimos-1 | Deimos Imaging (Spain) | SSTL-100 | 2009 | 22 m MS | 650 km | Operational |
NigeriaSat-2 | NASRDA (Nigeria) | SSTL-300 | 2011 | 2.5 m PAN | 20 km | Operational |
NigeriaSat-X | NASRDA (Nigeria) | SSTL-100 | 2011 | 22 m MS | 650 km | Operational |
DMC-3 (a/b/c) | DMCii, with 100% | SSTL-300S1 | 2015 | 1 m PAN | 23 km | Operational |
NovaSAR-S | UKSA | SSTL-300 avionics | 2015 | 6-30 m SAR | 15-750 km | In development |
Spacecraft
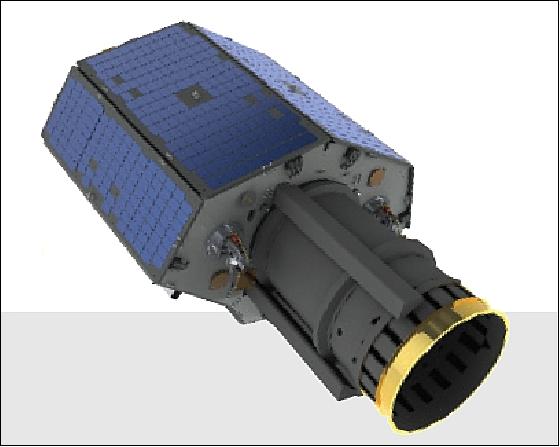
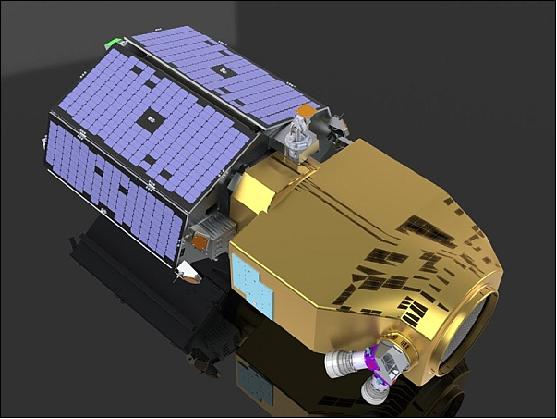
The DMC-3 constellation will be the first three spacecraft series of the SSTL-300 S1 bus - building on the heritage of the SSTL-300 platform and avionics of NigeriaSat-2. The SSTL 300 S1 bus is ideal for a wide range of commercial, civil and security applications, the agile SSTL 300 S1 Earth imaging system offers 1 m panchromatic and 4 m multispectral GSD imagery with a high speed downlink and a±45º fast slew off-pointing capability. Continuous technology innovation means that sub-meter imagery is possible on a minisatellite platform, along with quality and quantity of images to meet demanding rapid response applications. 7)
Reference orbit | SSO (Sun-synchronous Orbit), altitude = 650 km, LTAN = 10:30 hours |
Spacecraft platform | SSTL-300 S1 |
Spacecraft design life | 7 years |
Spacecraft mass | 447 kg |
Spacecraft agility | Body-pointing capability of up to ±45º, fast slew |
Pointing accuracy | Knowledge of 72 arcsec, pointing accuracy = 360 arcsec, pointing stability of 2 arcsec/s |
Spatial resolution of imagery | - Pan = 1 m GSD, (450-650 nm) |
Swath width | 23 km |
SNR (Signal-to-Noise Ratio) | All bands > 100:1 |
MTF at Nyquist frequency | > 10% for Pan, > 20% for MS |
Data quantization | 10 bit |
Data compression | JPEG-LS configurable |
Onboard data storage | 128 GB non volatile storage |
Data products | - Radiometrically and geometrically corrected images |
Safety and security | - Encryption of all command and telemetry data |
RF communications | X-band downlink for payload data at 320 Mbit/s |
EPS (Electrical Power Subsystem): Power is generated through the use of body-mounted solar panels on all seven satellite platform faces creating an area of 2.44 m2. The triple junction GaAs (Gallium Arsenide) solar cells deliver power to dedicated avionics that control the state of charge of a 15 Ahr battery assembly and condition a main power bus that operates at 28 to 33 V. The available payload power at EOL(End of Life) is projected to be around 140 W with peaks at 180 W. The PCDU (Power Conditioning and Distribution Unit) consists of a BCM (Battery Control Module) and a PDU (Power Distribution Unit). 8)
ADCS (Attitude Determination and Control Subsystem): The ADCS uses a redundant set of sun sensors and magnetometers for coarse attitude knowledge and new Procyon star tackers for high-precision three-axis orientation knowledge. Procyon uses two optical heads and two DPUs (Data Processing Units) with cross-strapping between the two strings for a high degree of redundancy. The optical heads use 60º baffles and are in size 9 cm x 11 cm x 11 cm plus the 14 cm x 16 cm baffle. Procyon uses APS (Active Pixel Sensor) technology to achieve a field of view of 15º x 15º and operates at an update rate of up to 4 Hz.
Actuation is provided by a set of four SSTL-100SP-O reaction wheels plus four 200SP-M momentum wheels that give the spacecraft a high degree of agility. Four reaction wheels are in use for redundant attitude control about the three axes, tolerating the loss of one reaction wheel without degradation of satellite attitude control capabilities. The reaction wheel assembly is a rotating inertial mass that is driven by a brushless DC motor that spins the wheel.
Three MRT-30 (Magnetorquers) are used for momentum management on the satellite and for attitude control in spacecraft safe mode. The MRTs are used during momentum dumps and for attitude control in spacecraft safe mode. The ADCS provides a pointing knowledge of 72 arcsec, a pointing accuracy of 360 arcsec and a pointing stability of 2 arcsec/s.
OBC (On-Board Computer): An OBC750 is used based on a BM PPC750FL processor. The OBC system is in charge of receiving and processing commands from Earth and controlling all satellite subsystems. The system also receives all payload data that is stored and conditioned for downlink by the OBC. The computer has a memory of 6 MB EEPROM (boot software), 256 MB EADS, 16 MB MRAM and 16 MB Flash. It supports the 1553B high-speed data bus as well as two dual CAN buses, eight LVDS inputs and outputs, four opto isolated inputs and four opto isolated outputs. The OBC has a size of 32 cm x 32 cm 6 cm and a mass of < 2.5 kg requiring 20 W of power during operation and 3 W in standby.
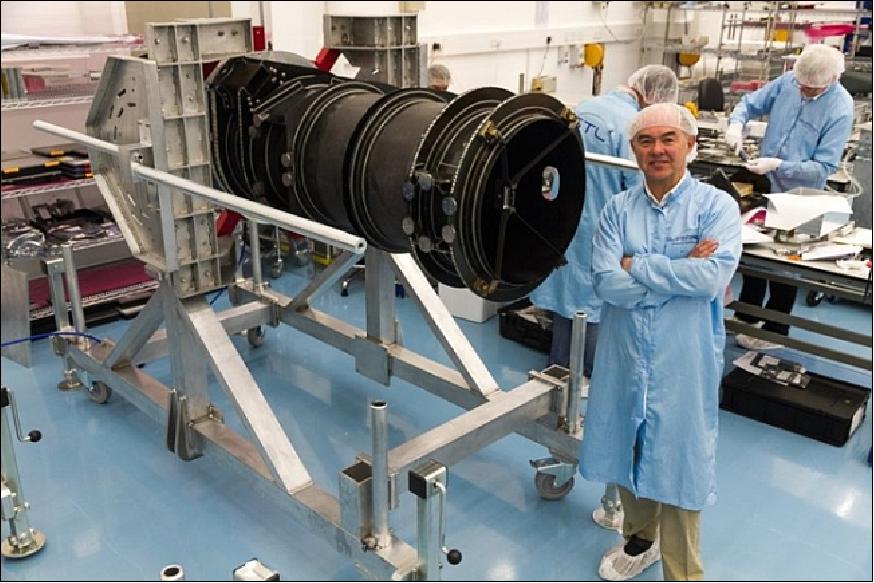
SSTL-300 S1 platform
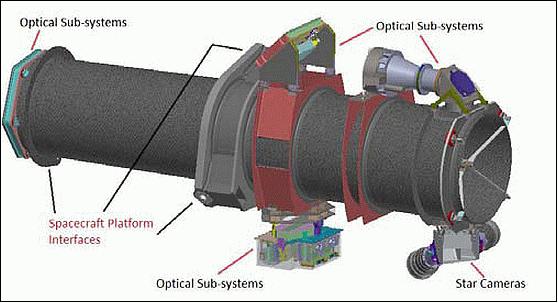
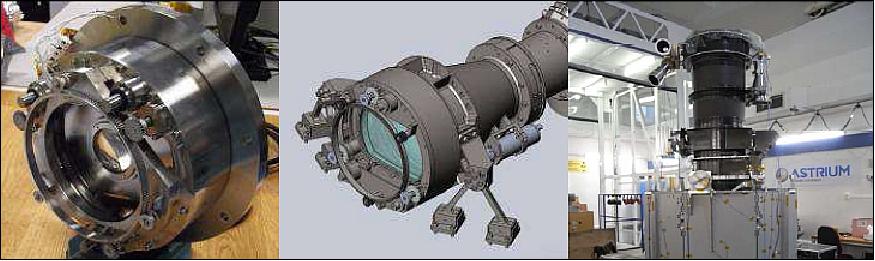
In developing the SSTL-300 S1 product, SSTL had to undertake the development of the S1 composite imager barrel, which forms the payload instrument's primary structure, measuring greater than 2.5m in length and consisting of in excess of 200 bonded components. The S1 variant (sub 1 meter) adds an imaging system which is capable of 1.0 m GSD. 9) 10)
The role of any primary structural element in satellite applications is to carry the flight loads, and to achieve appropriate spacecraft fundamental resonance frequencies. In the case of the S1 composite barrel, this had to be achieved whilst also maintaining low dynamic environments for the mounted optical subsystems and staying within the geometric constraints of the heritage SSTL-300 platform.
Intrinsic to the overall performance of the optical instrument, the overriding requirement of the S1 composite imager barrel is the maintenance of a high degree of dimensional stability in order to manage issues associated with temperature and moisture induced deformations; these being the result of the transition from the terrestrial assembly, integration and test environment to on-orbit operation conditions. Where structural requirements may typically be achieved within a wide design space, the optical performance derived requirements are uncompromising.
The critical requirements for the composite imager barrel structure are presented as follows:
1) Key optical systems requirements:
• To provide mechanical interfaces for, and support to, all optical subsystems achieving highly accurate positional and angular tolerances as manufactured and throughout the operational life of the instrument.
• To maximize axis-symmetry characteristics such that expansion/contraction of the structure is as uniform as possible.
• To ensure the dynamic environments to which the sub-systems shall be subjected as a result of launch conditions are both minimized and compliant with heritage levels.
2) Key structural / mechanical system requirements:
• To be accommodated within the constraints of the heritage SSTL-300 platform configuration utilizing a 3-2-1 type semi-kinematic athermalized isolation system to uncouple the instrument from platform deformations.
• To achieve stiffness characteristics including primary fundamental resonant frequencies that, coupled with a stringent mass budget, are compatible with SSTL generic specifications and hence compliant with multiple launch vehicle and constellation launch opportunities.
3) Key programmatic requirements:
• To achieve structural qualification within 24 months of requirements specification
• To be manufactured using established and robust processes compliant with a 4 units per year peak manufacturing rate and within an appropriate cost profile.
To achieve a design which satisfies the interdependent structural, optical and programmatic requirements, SSTL developed a configuration which maximizes the use of axis-symmetric geometry, component uniformity and commonality whilst attempting to isolate critical optical interfaces from principal flight load paths. For manufacturing easement, risk reduction, schedule and cost advantages, it was concluded at an early stage that the assembly would be constructed in a modular approach permitting parallel build of sub-elements. The modular construction is summarized in Figure 4.
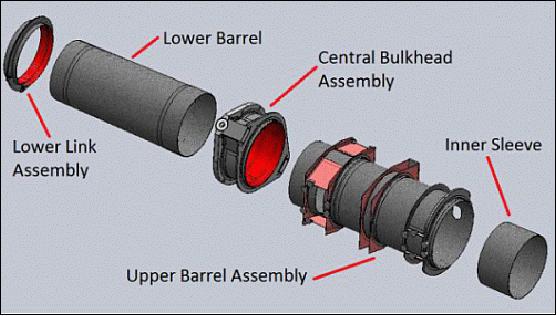
Upper Barrel Assembly: The upper barrel assembly definition was predominantly driven by the optical requirements to accurately locate and maintain the position of the optical subsystems throughout the life cycle of the instrument, whilst providing acceptable unit level dynamic environments during launch conditions.
Manufactured primarily from laminated pre-impregnated CFRP (Carbon Fiber Reinforced Polymer) materials using manual deposition techniques and autoclave initial cure and free-standing oven post cure production processes the assembly comprises of the following structural element types:
- Nominally quasi-isotropic balanced and symmetric laminated unidirectional CFRP tapered shell compromising multiple laminate thickness regions tailored as required for function and manufactured to maximize dimensional stability and minimize non-uniformity.
- Annular ring plates of both titanium cellular core sandwich and monolithic construction with laminates of quasi-isotropic nature balanced and symmetric either within the laminate or about the core to facilitate load introduction.
- Common circumferential ‘L' profile woven CFRP ring cleats exhibiting ideally axis-symmetrical stiffness characteristics to provide attachment between the barrel shell and annular plates.
- Monolithic woven and UD CFRP shear and tension members and cleats as required.
- Titanium fittings to provide interfaces at optical sub system locations.
The assembly is bonded using one of two epoxy paste adhesives, depending upon bond location and requirement. Accurate fixtures are used to achieve the extremely tight geometrical tolerances and where required, final machining and/or surface lapping operations are performed to assure geometric compliance with requirements.
Central Bulkhead Assembly: The primary role of the central bulkhead assembly is, in conjunction with the lower link assembly, to facilitate connectivity of the imager instrument to the spacecraft platform in the desired semi-kinematic configuration such as to limit undesirable load generation during instrument operation due to environment variations. Accordingly, the central bulkhead assembly supports two substantial bearing assemblies of 2 and 3 degree-of constraint configurations, situated an appropriate distance away from the instrument bore-sight; as required for spacecraft mechanical accommodation.
The central bulkhead is defined using concepts and features common to the upper barrel assembly. However, due to the increased magnitudes of loading, resulting from launch environment induced local load transfer, both the laminates and cores thicknesses are increased accordingly.
Lower Barrel and Inner Sleeve: Generically of common construction approach to the upper barrel shell, the lower barrel shell differs from it in length, diameter and laminate thicknesses, as appropriate to the component's structural and stability demands. At final assembly, where upper and lower barrels are integrated, a monolithic CFRP inner sleeve is installed in conjunction with the exterior mounted central bulkhead assembly to achieve a high strength, stiff, and fully symmetrical double lap shear bonded connection.
Lower Link Assembly: Providing the third point of connectivity for interface of the instrument to the spacecraft platform, the lower link assembly supports a pair of titanium spherical bearing housings, which ultimately allow a near single degree of constraint to be achieved via interfacing links.
Defined conceptually as a pair of back to back common ring cleats the lower link composite part is manufactured from woven CFRP with a fully tooled exterior surface in a single T-profile molding. The profile and laminate definition of the component are defined such as to protect a locally mounted optical subsystem during launch whilst providing a high degree of stiffness to limit potential ovalization of the open barrel end during instrument operational conditions.
Structural qualification: The first imager barrel was integrated into the SSTL-300 S1 structural qualification model (Figure 5) and was subjected to an appropriate qualification campaign as defined by the system requirements with the objectives to demonstrate, with respect to the imager barrel structure:
- The spacecraft, instrument and hence imager barrel structure achieve the desired stiffness requirements
- Compatibility with generic qualification test levels for the imager barrel strength and supported unit dynamic environments.

The Spacecraft, instrument and imager barrel structure completed the full test campaign with no signs of any structural damage or degradation. The primary fundamental resonant frequencies were demonstrated to be within 4% of test prediction. The barrel assembly exhibited high damping characteristics at the main mode of the spacecraft; >4% critical damping.
First Article Inspection: Upon completion of manufacture, the first article was subject to an extensive metrological study to confirm compliance with the required interface tolerances demanded by the optical sub-system interfaces. Following the successful completion of this phase the hardware was delivered to AIT for installation to the spacecraft structural qualification model.
Micro-vibration management and verification approach for the SSTL300-S1 spacecraft: 11)
There are two structural blocks: a payload assembly (150 kg) and a platform assembly. The payload sits in the middle of the platform. At the base of the platform is the reaction wheel assembly and at the top of the platform are 2 antenna pointing mechanisms. These are the noise sources for micro-vibration. From previous experience the reaction wheels are the dominant noise source. To mitigate this, the reaction wheel design was optimized to reduce micro-vibration and a wheel isolation system was developed.
The payload is made up of a number of subsystems which could be sensitive to micro-vibration. The design requirements on these subsystems require their modal frequencies to be between 150-250 Hz. Additionally there are payload/platform structural modes at approximately 50 Hz and 90 Hz. To prevent direct coupling with these structural modes there is an imposed limit on the maximum wheel speed.
The 100SP-O reaction wheels are designed for a 3-axis control system, in momentum bias or zero bias mode. Table 1 shows the 100SP-O specifications.
Mass, size | 2.6 kg, Ø 120 x 120 mm |
Angular momentum, maximum torque | 1.5 Nms, 0.11 Nm |
Operating temperature | -20ºC to +50ºC |
Power (at max speed of 5000 rpm at 20ºC) | ~10 W |
Design life | 7+years |
Reaction wheel micro-vibration optimization approach: For this mission, SSTL has elected to optimize the existing qualified 100SP-O wheel in order to reduce the qualification risk. Micro-vibration testing was carried out on the SSTL300-S1 SQM (Structural Qualification Model). The objectives of these tests were:
- To measure transfer functions from noise source locations to the imager, to correlate the FEM and assess damping.
- To measure accelerations at the payload with real noise sources running to provide a comparison with the analysis predictions.
The tests were carried out with the spacecraft suspended on an elastomeric sprung lifting frame tuned to a frequency of 2-5 Hz. All of the transfer function measurements were carried out using electrodynamic exciters generating a 2 N input sweeping from 20 Hz to 500 Hz at 2 oct/min. These test generated good signal to noise and were conducted in a clean room in the day time. Real noise source measurements were carried out at night with every effort possible made to reduce ambient noise. Acoustic contamination is a significant issue for real noise source testing due to the very low levels of excitation produced.
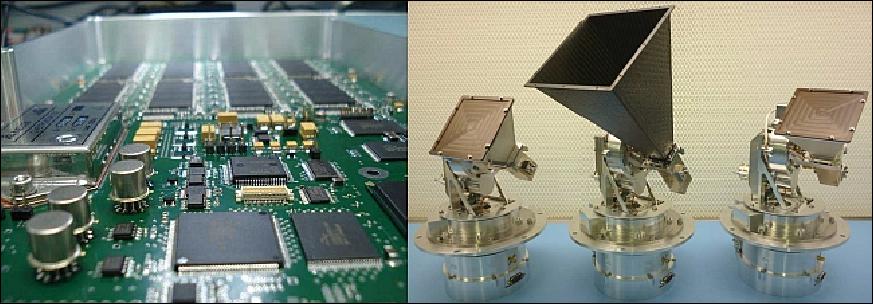
RF communications
A second generation X-band payload downlink chain has been developed for use on SSTL's future missions, incorporating a HSDR (High Speed Data Recorder) with FMMU (Flash Mass Memory Unit), next generation XTx (X-band Transmitter) and higher gain APM (Antenna Pointing Mechanism).
The FMMU, shown in Figure 8 (left), utilizes a commercially available non-volatile flash memory to deliver total data storage of 128 GByte (i.e., 1 Tbit). Since the data read/write speed of flash memory is relatively low compared to that of DDR2 (Double Data Rate), and since the mass memory must be able to acquire data at extremely high data rates from the payload, the FMMU is being used as second-level storage, with the HSDR still used for data acquisition, processing and downlink. However, the FMMU will also be upgraded in due to course to allow it to function as an independent, high capacity storage solution for missions with a lower payload data acquisition rate (Ref. 6).
As with many of SSTL's products, the next generation XTx has been developed from a heritage design in order to maximize confidence in its suitability for the space environment. This transmitter variant is initially designed to deliver a maximum data rate of 400 Mbit/s, using 8PSK modulation and 2/3 TCM (Trellis Coded Modulation) FEC (Forward Error Correction) coding. The use of this higher order modulation scheme allows the signal bandwidth to be reduced, whilst the 2/3 TCM coding adds a lower coding overhead (albeit with reduced FEC coding gain). This means that it is possible to support a data rate approximately four times higher than the previous variant with a bandwidth less than double; this is advantageous as it makes better usage of the limited X-band spectrum and simplifies the HPA (High Power Amplifier) design.
Two major changes have been made to this transmitter to enable the higher data rates. Firstly, the modulator module has been upgraded to use a Xilinx Virtex-5 SX FPGA; initial radiation characterization performed on this FPGA has been favorable and its high performance means that it can be used to support higher data rates and higher order modulation schemes such as 16PSK. Secondly, the HPA has been upgraded to support the higher bandwidth required and to deliver a total RF output power of 12 W. The next generation XTx has been designed with an eye to the future, potentially allowing the development of higher data rate solution. In the short term, it is planned to develop VHDL [VHSIC (Very High Speed Integrated Circuit) Hardware Description Language] to operate the transmitter with more efficient FEC coding scheme of 5/6 TCM, allowing a data rate of 500 Mbit/s to be supported while keeping the symbol rate unchanged at 200 Msample/s.
Also, a new variant of the APM has been developed, using a +18 dBi carbon fiber horn antenna. The advantage gained from carbon fiber over aluminum (as used on the +15 dBi variant) is that the motor and bearing does not need to be modified to accommodate a higher mass antenna. In turn, this maximizes the flight heritage that can be inherited from the NigeriaSat-2 mission. It was found that the composite horn was electromagnetically opaque; hence, it did not need the addition of a metallic coating for use as an antenna.
SSTL's next generation payload downlink chain, comprising 128 GByte FMMU, HSDR, 400 Mbit/s XTx and +18 dBi APM, will fly for the first time on SSTL's TechDemoSat-1 mission, currently expected to launch during the first quarter of 2013.


Launch
Launch: The three- spacecraft DMC-3 constellation was launched on July 10, 2015 (16:28:00 UTC) on a PSLV-C28 vehicle (XL configuration) of ISRO from SDSC (Satish Dhawan Space Center) SHAR, located on the south-east coast of India. 12) 13) 14)
Orbit: Sun-synchronous orbit, altitude = 651 km, inclination = 97.8º, LTAN (Local Time on Ascending Node) = 10:30 hours. The three spacecraft will be evenly spaced in the same orbital plane (120º apart) with daily revisit times which is crucial for change detection, disaster monitoring and response planning, and essential for acquiring cloud-free imagery.
Secondary payloads
• CBNT-1 (Carbonite-1), a technology demonstration Earth Observation (EO) microsatellite (91 kg) of SSTL. Validation of some new avionics and EO capabilities.
• DeOrbitSail, a demonstration nanosatellite (7 kg) of SSC (Surrey Space Center).
With a total launch mass of 1440 kg, this represents the heaviest commercial launch so far for the organization. ISRO has built a circular Launcher adapter (L-adapter) and a triangular deck called Multiple Satellite Adapter-Version 2 (MSA-V2) exclusively for the purpose (Ref. 13).

Mission Status
• February 3, 2020: SSTL has added a new sub-meter resolution image acquired by the SSTL S1-4 constellation. 15)

- The SSTL S1-4 satellite was launched in 2018 and has a mass of 440 kg. It is capable of acquiring multiple targets in one pass and utilizes spot, strip and mosaic imaging modes and 45 degree off-pointing agility for a range of applications including urban planning, agricultural monitoring, land classification, natural resource management and disaster monitoring. The very high resolution imager on board the spacecraft was designed and manufactured by SSTL and acquires sub 1 meter resolution images in panchromatic mode and sub 4 meter resolution images in multispectral mode, with a swath width of about 20.8 km.
- Data capacity from the satellite is leased to Airbus and Twenty First Century Aerospace Technology Co Ltd (21AT).
• April 10, 2018: Airbus has entered into an agreement with Twenty First Century Aerospace Technology Co. Ltd (21AT), the Chinese commercial satellite operator, for the distribution of the images acquired by their TripleSat constellation. 16)
- The TripleSat constellation (DMC-3) consists of three identical very high-resolution Earth observation satellites set 120° apart, travelling around the same orbit. They offer daily monitoring of any place on Earth revealing details as small as 80 cm. The satellites were specifically designed to map large area coverage and will, therefore, reinforce the Pleiades and SPOT satellite capacities, improving access to information in critical situations.
- On the optical side, Airbus' constellation already comprises the very high-resolution Pleiades-1A and -1B, the high-resolution SPOT-6 and SPOT-7 satellites as well as the DMC-3 constellation. On the radar side, weather-independent satellites such as TerraSAR-X and TanDEM-X were recently joined by the PAZ radar satellite (launch on 22 Feb. 2018). The constellation is also reinforced by satellite partners such as KazEOSat. These partnerships complement the offering and service for demanding applications.

• February 2, 2018: SSTL has signed a new contract with 21 AT (Twenty First Century Aerospace Technology Company Ltd.) of China to provide data from a new Earth Observation (EO) satellite (SSTL-S1) that is due for launch via an ISRO PSLV launch vehicle mid-year. The contract was signed by Sir Martin Sweeting, Executive Chairman of SSTL, and Mme. Wu Shuang, President and Chairman of 21AT and witnessed by the UK Secretary of State, Dr. Liam Fox. 17) 18)
- As the manufacturer and owner of the SSTL-S1 satellite, SSTL will lease imaging payload capacity to 21AT for the lifetime of the satellite, designed to be in excess of seven years. The SSTL-S1 satellite will contribute sub-one meter resolution image data into 21AT's existing TripleSat Constellation service, which is comprised of three SSTL DMC3 satellites that were launched in 2015. The addition of the SSTL-S1 satellite will enhance both the revisit capability of the TripleSat Constellation and the constellation's efficient global high resolution remote sensing satellite data acquisition and operation services that support a wide range of existing successful user applications by 21AT's domestic and overseas customers.
- The design of the SSTL-S1 is identical to the present three satellites in the TripleSat Constellation that were launched in 2015. The satellite has a mass of 450 kg and is capable of acquiring multiple targets in one pass, using spot, strip and mosaic imaging modes and 45 degree off-pointing agility for a range of applications including urban planning, agricultural monitoring, land classification, natural resource management and disaster monitoring. The very high resolution imager on board the spacecraft has been designed by SSTL and will provide sub-one meter resolution images in panchromatic mode and sub-four meter resolution images in multi-spectral mode, with a swath width of about 24 km.
- SSTL's Sir Martin Sweeting commented this contract extends SSTL's 15 year long-term UK-China partnership with 21AT and consolidates the success of the TripleSat Constellation service. Adding capacity to the constellation with a new satellite demonstrates the high fidelity of the imagery and the success of 21AT's business model.

• December 2017: Airbus DS signed a Master distributor agreement with 21AT (Twenty First Century Aerospace Technology Company Ltd.) of China, to allow a worldwide distribution of the TripleSat very high resolution images. The TripleSat constellation is the enabler for customers' operational and sustainable application. 19)
• December 5, 2017: UrtheCast Corp. and Twenty First Century Aerospace Technology Co. Ltd ("21AT"), China's largest independent commercial satellite operator and non-governmental investor in remote sensing satellite systems, today announced a long-term strategic partnership to acquire geospatial data from the UrtheDailyTM Constellation, UrtheCast's planned constellation of Earth observation satellites which will deliver daily, medium resolution imagery of the entire planet's landmass, excluding Antarctica. 20)
- By entering into this agreement, 21AT becomes a key anchor partner for the UrtheDailyTM Constellation and UrtheCast's strategic partner for UrtheDailyTM Constellation data within the large Chinese market. 21AT, already one of the world's leading providers of satellite imagery and services, will use the data to build an applications service platform to improve the decision-making services for users across China and beyond.
• August 2016: The three spacecraft of the DMC-3 mission (TripleSat Constellation) have completed the commissioning campaign which includes: phasing maneuvers to space them out equally in the orbit plane, completing in-orbit verification and calibration campaign, and demonstrating high throughput capacity. DMC-3 is designed to provide high precision pointing capability with fast slewing in order to acquire multiple targets within a single pass. The images captured provide a high degree of precision with respect to the scene being captured. This enables the continuation of many of the commercial applications that have already been established which include: agriculture, deforestation, land use, and disaster monitoring. 21)
- As of May 2016, a total of 36139 scenes have been successfully captured and downlinked across the constellation. This equates to 18.5 million km2 captured in 10 months since launch; this is approximately twice the area of the US or nearly 76 times the area of the UK. A total of 44.5 TB of imager data has been generated. Note that this period included the LEOP (Launch and Early Operations Phase) and commissioning phase, during which the satellites were not being fully utilized.
- In the month of May alone, 13950 scenes were successfully imaged and downlinked by 21AT; approximately 7.1 million km2 was captured and 17.1 TB of data generated. Each satellite captured an average of 150 scenes per day (an area of 76 600km2) and generated 185 GB of data.

• July 10, 2016: 21AT is celebrating the anniversary of the launch of the TripleSat Constellation (named as Beijing-II in China). All three satellites have been moved to their designated orbital positions, 33 minutes behind each other (120º apart) and will be maintained at the configuration over the lifetime of the TripleSat Constellation, which makes it possible to target anywhere on the Earth once per day. The high SNR (Signal to Noise Ratio) is enabling the satellites to produce excellent very high-resolution images. 22)
- For commercial operations, 21AT (Asia) in Singapore and a global distribution network have been established to support streamlined access to the worldwide market. Two ground stations have been installed in Beijing and Singapore to increase the data capacity and for international data distribution. 21AT has opened its online Portal access that provides archive images search and new tasking orders tools for distributors and customers.
• March 4, 2016: SSTL is in the very final stages of commissioning the DMC-3 spacecraft constellation and calibrating the imagers; the project is due to hand over the constellation operations this month to the customer, 21AT in Beijing, China. The three satellites are all operating nominally in orbit. 23)
• Sept. 16, 2015: The first 1 m high resolution optical satellite imagery from the DMC-3/TripleSat Constellation satellites has been released today. This follows the successful launch of the three Earth Observation minisatellites on an Indian PSLV in July and in-orbit commissioning and calibration by engineers from SSTL (Surrey Satellite Technology Ltd). - The VHRI 100 (Very High Resolution Imager 100) on board the satellites provides 1m native GSD (Ground Sampling Distance) in panchromatic mode and 4 m GSD in multispectral mode with a swath width of 24 km. 24)
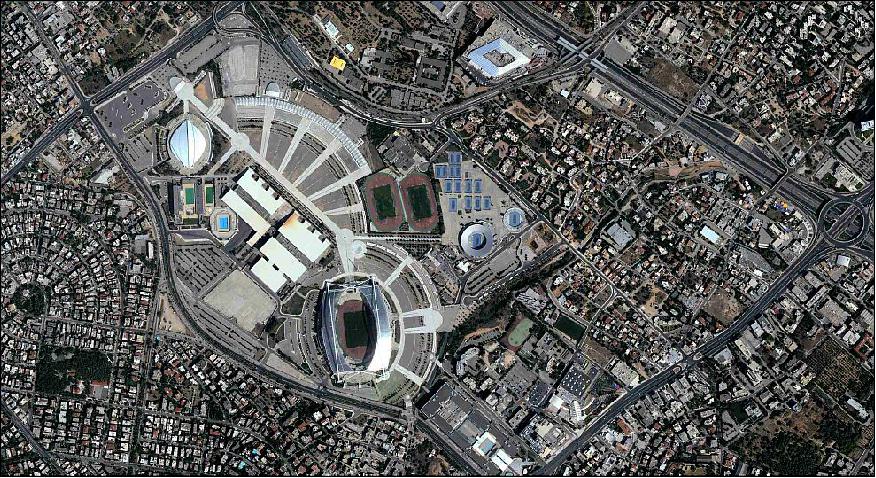
- The Twenty First Century Aerospace Technology Company Ltd (21AT), a commercial Earth observation satellite operator based in Beijing, has bought 100% of the imaging capacity of the three satellites for 7 years to provide their satellite data services from the TripleSat Constellation. 21AT will also create new applications for customers and business opportunities for worldwide partners through its operational information services powered by the TripleSat Constellation.

- The wide swath width of the imagers combined with agile off-pointing will enable the TripleSat Constellation to target anywhere on Earth at least once per day and provides the best combination of spatial resolution and time resolution – aiming at stimulating operational monitoring applications, such as urban planning and intelligent management, based on changes detected by timely regular, cloud-free, very high-resolution imagery.
• Following confirmation of separation of all three spacecraft from the launch vehicle, the ground station at SSTL's Spacecraft Operations Centre in Guildford, UK and at Svalbard successfully established contact with the satellites. SSTL's engineers will now begin the commissioning of the platform systems on board the three satellites, with commissioning of the imaging payloads commencing, once the platform commissioning is complete (Ref. 14).
Sensor Complement
SSTL-300 S1 Imager
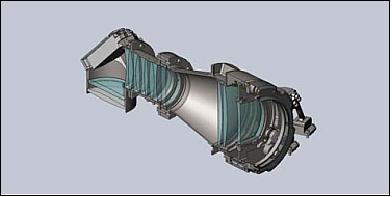
The imager used in the S1 spacecraft is a modified Newtonian telescope which gives the best optical image quality within the constraints of the platform structure and launch accommodation. The focal plane makes use of a TDI (Time Delayed Integration) sensor which gives a great SNR (Signal-to-Noise Ratio) for low albedo targets over extended periods of time, independent of seasonal variations.
The 1m panchromatic and 4m multispectral imagery from the DMC-3 satellites will provide 21AT's customers with greatly enhanced data continuity from in 2005 launched Beijing-1 and by leasing capacity from three satellites, 21AT will have the power of the new constellation at its disposal - providing both increased resolution with rapid imaging and revisit. 21AT will use the image data mostly for high resolution mapping of vast areas of the Chinese landmass by imaging strips with a length of up to 4000 km. - After launch of the DMC-3 constellation, 21AT dubbed the Constellation "Beijing-2".
Note: SSTL refers to the SSTL-300 S1 Imager also as VHRI 100 (Very High Resolution Imager 100).
Imager type | Pushbroom |
Panchromatic band resolution | <1 m GSD (Ground Sample Distance) |
MS (Multispectral) band resolution | <4 m GSD |
Swath width | 23 km (from a nominal reference altitude of 630 km) |
SNR | 100:1 |
Pan MTF (Modulation Transfer Function) | >10% |
MS MTF | >20% |
Detectors | Use of 5 linear detector arrays separated in the along-track direction in the common focal plane of the telescope |
The SSTL300-S1 imager is the next evolution from the 2.5 m resolution imager flown on NigeriaSat-2. In both imagers, on-orbit focusing is performed by adjusting the position of a focus lens linearly along the lens optical axis. 25)
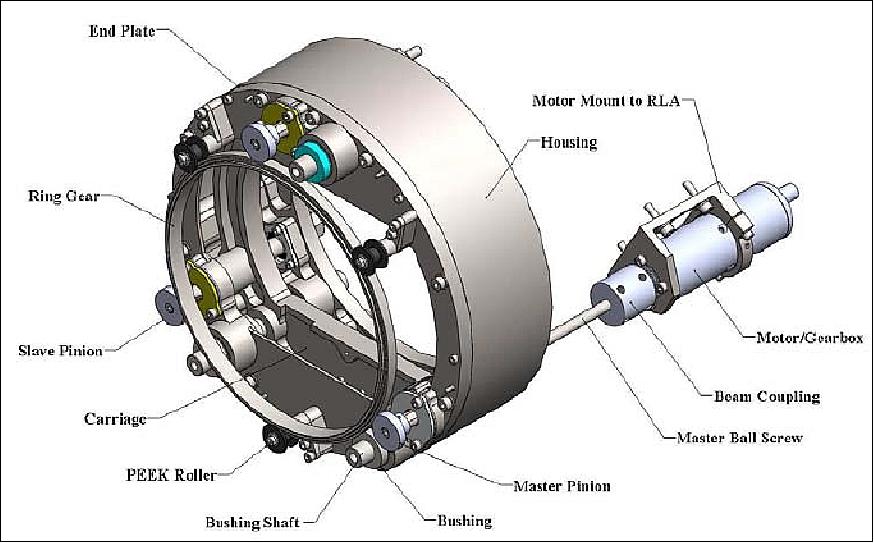
The S1 Imager has more stringent requirements for the focus lens' alignment, linear position, and stability, as well as a more challenging environment and very different location on the imager. This required the development and qualification of a new focus mechanism design integrated into one of the optical subassemblies on the imager, the RLA (Relay Lens Assembly), a location depicted in Figure 18.
The focusing lens is the final lens on the RLA along the optical path. This configuration was traded off against other locations, including at the focal plane; however, the logistical challenges and criticality of the thermal solution proved more onerous than the mechanical environment at the RLA. As a result, the focus mechanism is fully integrated into the RLA.
The fundamental purpose of the focus mechanism is to position the focusing lens along the optical axis. In order to ensure that the Earth image is focused with the focal plane's required depth of focus, the lens must be positioned within 5 µm. Due to various factors affecting the focal length of the imager, it must be able to position the lens along a 10 mm length of travel. The required life and total travel are small, driven mostly by ground cycles.
In doing so, the lens must not be perturbed in any other degree of freedom, either during focusing or due to test, launch, micro-vibration, or thermoelastic loads. The parallel shift of the lens optical axis (referred to as decentration) must be within 5 µm of the nominal position. The tilt of the lens optical axis must be within 15 arcsec of the nominal orientation – also expressed as 10 µm TIR (Total Indicated Run-out) on the lens surface.
The lens must also be able to be installed after the mechanism has already been qualified; the sequence of assembly has to consider the large size of the lens (148 mm diameter).
Instrument mass | < 5 kg |
Linear position resolution | 5 µm |
Sensor accuracy | ±2 µm |
Linear travel | 10 nm |
Optical alignment | 10 µm decentration (diameter), 10 µm TIR (15 arcsec) tilt |
Design load | 60 g axial, 30 g transverse |
Temperature range | -20ºC to +50ºC |
The design load used for the mechanism is 60 g quasi-static in the optical axis, and 30 g in the transverse axes. Also, the mechanism must provide independent feedback on focusing movement, not require launch locks, and hold the focus position while unpowered.
EM (Engineering Model) concept:
The mechanism concept settled upon for an engineering model utilizes a stepper motor-driven ball screw to drive the lens carriage along three linear ball bushing shafts. The design allowed two different configurations to be tested: a single screw configuration which drives the carriage at one edge of the lens, and a multi-screw configuration which drives the carriage at three points roughly equally spaced around the lens. The motion of the three screws is synchronized by a three pinion and ring gear set. The EM mechanism is built largely to a flight standard, but using COTS tribological components and eliminating costly custom modifications allowed the EM to be assembled at a low cost.
Actuator: As a result of the requirement to position the lens with a high resolution and to do so over a comparatively large distance, concepts from other focus and linear positioning mechanisms quickly fell by the wayside. In order to avoid windup, low friction and high stiffness along the line of action are required. For this reason a 440C stainless steel ball screw with a 2 mm lead pitch was selected. The accompanying ball nut has an integral thread that easily clamps on to the lens carriage. In keeping with SSTL's ethos, both the ball screw and its supporting spindle bearings are COTS components, with the ball screw undergoing post-machining and lubrication under the direction of SSTL.
Structure: The focus lens has a diameter of 148 mm, and is truncated at two sides with a width of 110 mm. It is first installed into a titanium lens cell, and then subsequently the cell is bonded into place in the titanium carriage. Instead of the typical installation of the linear bushings into the carriage, the focus mechanism has the bushing shafts installed in the carriage. This is for two reasons.
Firstly, the linear bushings are designed to have two bushings along each shaft to react moment loads. Installing two bushings on the carriage would have a smaller distance between the two bushings, but would again unnecessarily extend the length of the structure, with the corresponding increase in mass.
Secondly, it is of paramount importance is that thermoelastic distortions are minimized across the focus mechanism structure. For this reason, the main housing, end plate and carriage are all titanium and largely axisymmetric; the other structural elements driving the position of the carriage, the bushing shafts and the bushings themselves, are 440C stainless and only a mismatch of 3.4 ppm/°C. Since the only CTE mismatch (the length of the shafts) is compensated by the linear bushings; if the shaft was mounted to the end plate and housing, it would impart a load on the structure at the operating temperature of -2.5°C which is thus avoided.
The structure is designed so that the bearing bores (for the ball screw spindle bearings) and the bushing bores can be match machined, thereby ensuring their concentricity to within a few microns. The fit of the housing and end plate is retained upon disassembly and assembly with six tapered dowels fitted before match machining takes place.
Sensor: A further requirement on the focus mechanism is that when a focusing movement is commanded, independent feedback can confirm that the movement has taken place. This had to be measured linearly; an input or output encoder on the motor/gearbox would not suffice. To that end a vacuum-rated non-contacting linear encoder was selected and implemented in a location on the mechanism expected to see <1 krad TID. Selecting a vacuum-rated EEE part provided it is effectively shielded is in keeping with SSTL's COTS approach.
Imaging modes
From its orbit, DMC-3 can observe a ground swath with a width of 23 km. The maximum swath length is limited by the onboard data constraints and is about 4,000 km. 21AT will primarily use the satellites for imaging of the Chinese territory with high revisit times.
DMC-3 supports a number of different imaging modes. In scene mode, the instrument delivers images of 23 km x 23 km in all five spectral bands. Scenes can be targeted within the roll capability of the satellite. Owing to the high agility of the spacecraft, scenes that are separated in the cross-track direction, but not in the along-track direction, can still be imaged on a single pass.
• Strip mode delivers long strips of images in the nadir-pointing direction. This mode is primarily used for applications such as mapping and systematic mosaic imaging to deliver complete maps of certain areas, territories and countries. The maximum strip length is 175 scenes.
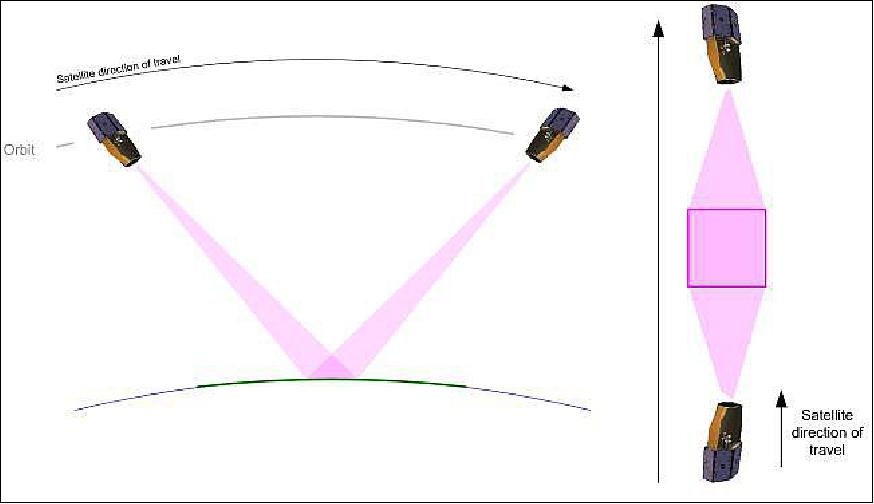
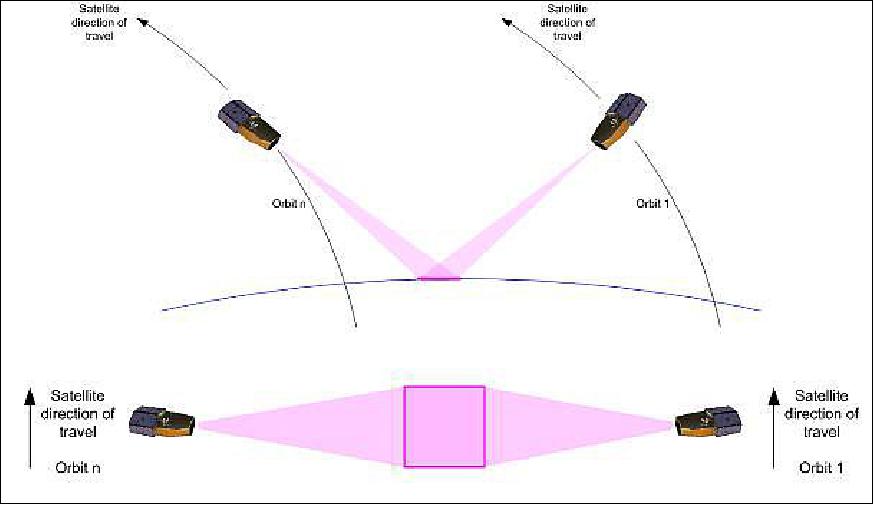
• Stereo imaging can be supported by the satellite on a single pass – requiring the spacecraft to acquire an image of the same ground area from two different view angles so that ground processing algorithms can combine the images to deliver height information on a given target. The angle at which the image pair is acquired can be varied for different applications.
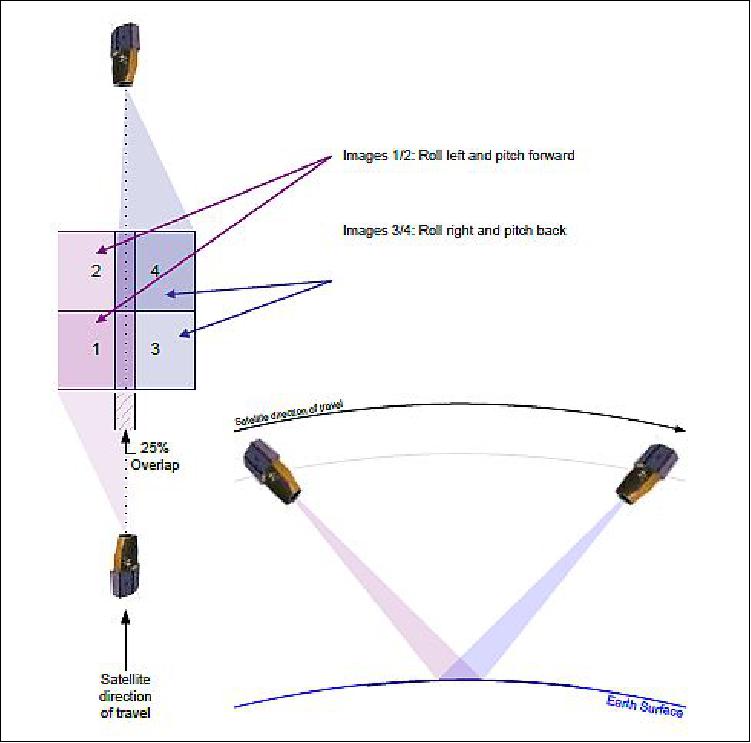
• A more complex imaging mode is the Area Mode in which the satellite conducts roll and pitch maneuvers to artificially widen the swath width by obtaining images of adjacent scenes. The standard form of single-pass area imaging to be employed by DMC-3 would be a 2 x 2 observation of a zone 40 km x 45 km in size. Earlier information also indicated that 3 x 3 single-pass area imaging would be possible using the vehicle's fast response system.
The compound modes allow for along-track and across-track imaging as shown in Figure 21 and Figure 22, respectively. This allows for a target on the ground to be imaged from two different viewpoints in order to build up a stereo image. In addition, a wider target area can be covered with the Mosaic mode, as shown in Figure 23.
Ground Segment
The Twenty First Century Aerospace Technology Co., Ltd. (21AT) is a Beijing based high-tech enterprise and is the first commercial Earth observation satellite operator and service provider in China. 26)
- In its business model, the 21AT mission features TSCT (TripleSat Constellation Terminal) and DDMS (Data Delivery and Management Systems). The TSCT allows users to have a real-time interface to the TripleSat constellation database, realizing the enquiry of the data catalog, and purchase of data products online. The production status of the ordered data could be also monitored by the users. The system allows users to automatically download the deliverables, during which the breakpoint resume is also supported. The downloaded data products could be further managed by the data management system and subsequently be put in its storage. The system consists of four modules, including data enquiry, data purchase, data acceptance, and the personal center.
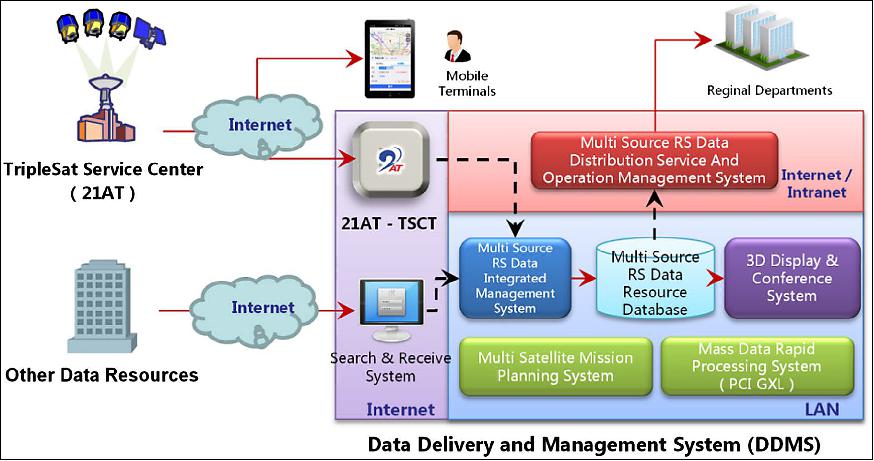
Solution description: 21AT DDMS is a total solution for a customer who needs to receive TripleSat Constellation images, as well as other satellite data, manage the mass data from various data sources in one catalog and make the data available to its subordinates. 21AT DDMS comprises seven subsystems, which can be combined in a very flexible manner based on customer needs. These seven subsystems are: (i) TSCT; (ii) data management system, (iii) data distribution system, (iv) 3D display and conference system, (v) Multi-satellite mission simulation system, (vi) Multi-source data access system, and (vii) mobile terminal system. The solution system diagram is shown in Figure 24.
21AT DDMS is established in the Client/Server and Browser/Server mixed system model and developed by the computer programming languages of JAVA, C#, and C++, etc. It forms a time-space integrated multi-source remote sensing product database, which also supports data management and application development. The Hierarchical structure diagram of solution system is shown in Figure 25.
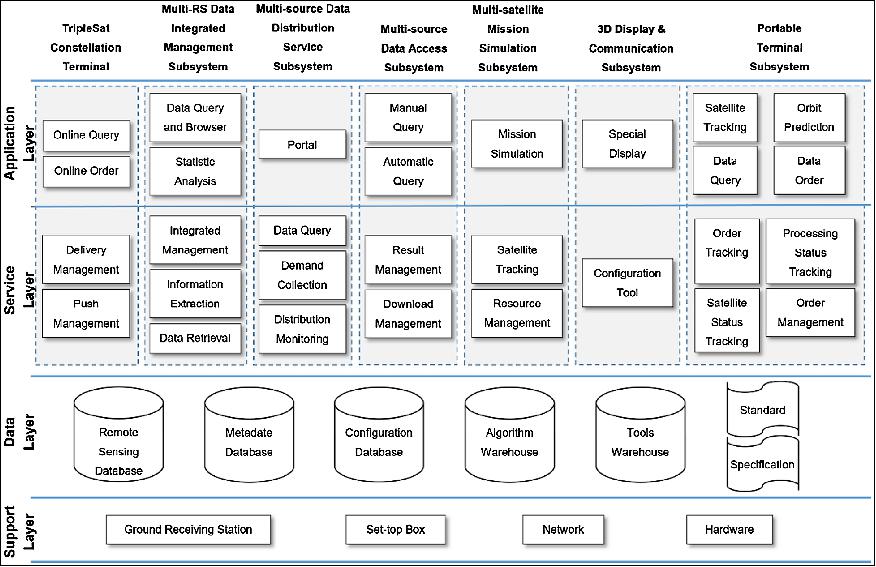
Figure 25: The hierarchical structure diagram of solution system (image credit: 21AT)
TSCT (TripleSat Constellation Terminal)
The TSCT allows users to have a real-time interface to the TripleSat constellation database, realizing the enquiry of the data catalog, and purchase of data products online. The production status of the ordered data could be also monitored by the users. The system allows users to automatically download the deliverables, during which the breakpoint resume is also supported. The downloaded data products could be further managed by the data management system and subsequently be put in its storage. The system consists of four modules, including data enquiry, data purchase, data acceptance, and the personal center.
The data enquiry module enables the users to query the database catalog of the TripleSat Constellation, while the search engine supports the choice of satellite, time & location, and the rate of cloud coverage. The detailed catalog information of the database could be checked, and the quick-view images could also be overlaid on the base map, helping users in the data selection.
The data purchase module includes both archiving data and tasking data procurement. The module allows users to have a real-time tracking of the submitted order forms, including the approval status, production, and the delivery status. The function of order form consultation also enables users to communicate directly with the data administrators.
The data reception module realizes a real-time interface to the TripleSat Constellation database. The data downloading is automatic, which consists of the data ordered by the users or pushed by the system. The users are able to select the download path and to connect with the Data Management System, sequentially realizing the closed-loop management from data downloading to storage.
The personal center allows the users to check the data order forms and modify the registration information. The submitted order can be searched in the system in different ways.
The other important function of the TSCT is tracking the satellites and shows the real-time satellite passes over the target area; thus, it can generate an accurate data acquisition request in a fast and straightforward manner. The request will be seamlessly submitted from the TSCT to the mission control center of the TripleSat constellation, via the secured network. Subsequently, the received images will be automatically pushed to the customer site.
The reader the referred to Ref. 26) for further details.
SSTL S1-4 Earth Observation Mission Overview
In February 2018, Twenty First Century Aerospace Technology Co Ltd (21AT) of Beijing signed a contract with SSTL (Surrey Satellite Technology Ltd) to provide data capacity from the new Earth Observation satellite (SSTL-S1) due for launch on PSLV in the middle of this year. The contract was signed by Sir Martin Sweeting, Executive Chairman of SSTL, and Mme Wu Shuang, President and Chairman of 21AT, and witnessed by the UK Secretary of State, Dr Liam Fox. 27)
As the manufacturer and owner of the SSTL-S1 satellite, SSTL will lease imaging payload capacity to 21AT for the lifetime of the satellite, designed to be in excess of 7 years. The SSTL-S1 satellite will contribute sub-meter resolution image data into 21AT's existing TripleSat Constellation service, comprising three SSTL DMC-3 satellites launched in July 2015. The addition of the SSTL-S1 satellite will enhance both the revisit capability of the TripleSat Constellation and its efficient global high resolution remote sensing satellite data acquisition and operation services that support a wide range of existing successful user applications by 21AT's domestic and overseas customers.
SSTL's Sir Martin Sweeting commented "I am delighted to be here today to sign another contract that extends SSTL's 15-year long-term UK-China partnership with 21AT and consolidates the success of the TripleSat Constellation service. Adding capacity to the Constellation with a new satellite demonstrates the high fidelity of the imagery and the success of 21AT's business model."
Spacecraft
The design of the SSTL-S1 is identical to the present three satellites in the DMC-3 TripleSat Constellation that were launched in 2015. It uses the SSTL 300-S1 platform, has a mass of 440 kg and is capable of acquiring multiple targets in one pass, utilizing spot, strip and mosaic imaging modes and 45 degree off-pointing agility for a range of applications including urban planning, agricultural monitoring, land classification, natural resource management and disaster monitoring. The very high resolution imager on board the spacecraft has been designed by SSTL and will provide < 1 m resolution images in panchromatic mode and <4 m resolution images in multispectral mode, with a swath width of about 24 km.

Launch
Launch: The NovaSAR-S minisatellite, along with SSTL S1-4, a high resolution Earth observation minisatellite of SSTL, were launched on 16 September 2018 (16:38 UTC) on the PSLV-C42 vehicle of ISRO from SDSC (Satish Dhawan Space Center) from SHAR, ISRO's launch center on the south-east coast of India, Sriharikota. Launch provider: Antrix Corporation Ltd., the commercial arm of ISRO. 28) 29)
Orbit: Sun-synchronous orbit, altitude of ~589 km, inclination of 97.5º, LTAN (Local Time on Ascending Node) = 10:30 hours. Note: The SSTL S1-4 operating at a lower orbit, provides higher resolution data than the TripleSat satellites (at 651 km altitude), but obviously being in a different orbit it is operated independently of the TripleSat constellation.
This is a commercial launch of ISRO without an Indian payload. ISRO is is gearing up for full-fledged commercial launch services from September onwards.
Sensor Complement
SSTL-300 S1 Imager
The imager used in the S1 spacecraft is a modified Newtonian telescope which gives the best optical image quality within the constraints of the platform structure and launch accommodation. The focal plane makes use of a TDI (Time Delayed Integration) sensor which gives a great SNR (Signal-to-Noise Ratio) for low albedo targets over extended periods of time, independent of seasonal variations.
Note: SSTL refers to the SSTL-300 S1 Imager also as VHRI 100 (Very High Resolution Imager 100).
Imager type | Pushbroom |
Panchromatic band resolution | <1 m GSD (Ground Sample Distance) |
MS (Multispectral) band resolution | <4 m GSD |
Swath width | 24 km (from a nominal reference altitude of 630 km) |
SNR | 100:1 |
Pan MTF (Modulation Transfer Function) | >10% |
MS MTF | >20% |
Detectors | Use of 5 linear detector arrays separated in the along-track direction in the common focal plane of the telescope |
The reader is referred to the description of the identical DMC-3 mission at the beginning of this file regarding the spacecraft as well as the payload.
References
1) Phil Davies, Andrew Cawthorne, Paul Carter, Liam Sills, Alex da Silva Curiel, "The DMC-3 1 m Small Satellite Constellation," 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011, IAA-B8-0401, URL: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA
/archiv8/Presentations/IAA-B8-0401.pdf
2) "David Cameron andWen Jiabao witness DMCii landmark satellite imaging deal with Chinese company," DMCii Press Release, June 29, 2011, URL: [web source no longer available]
3) "DMCii signs landmark satellite imaging deal with Chinese company," Space Daily, June 30, 2011, URL: http://www.spacedaily.com/reports/DMCii_signs_landmark_satellite_imaging_deal_with_Chinese_company_999.html
4) https://web.archive.org/web/20120311000011/http://www.sstl.co.uk/missions/dmc3
5) Stefanie Kohl, Zeger de Groot, Andrew Cawthorne, Luis Gomes, Martin Sweeting, "DMC3 Constellation: Sub-meter resolution imagery at lowest costs," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.2.1
6) Mark Brenchley, Peter Garner, Andrew Cawthorne, Katarzyna Wisniewska, Philip Davies, "Bridging the Abyss - Agile data downlink solutions for the Disaster Monitoring Constellation," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
7) J. Paul Stephens, "New Sensors: Update on developments in the DMC Constellation," Proceedings of the 11th Annual JACIE (Joint Agency Commercial Imagery Evaluation) Workshop, Fairfax, VA, USA, April 17-19, 2012, URL: http://calval.cr.usgs.gov/wordpress/wp-content
/uploads/Stephens_JACIE_DMCii_presentationApr2012.pdf
8) Patric Blau, "DMC3 Satellite Constellation," Spaceflight 101, URL: http://www.spaceflight101.com/dmc3.html
9) Chris Hamar, Trevor Wood, Sami Alsami, Ben Hallett. "Development of the SSTL-300-S1 composite imager barrel structure," Proceedings of the13th European Conference on Spacecraft Structures, Materials & Environmental Testing (SSMET), Braunschweig, Germany, April 1-4, 2014, ESA SP-727
10) https://hugepdf.com/download/sstl-300s1-datasheet_pdf
11) G. Richardson, G. Smet, G. Aglietti, T. Seabrook, S. Alsami, "Managing micro-vibration on the SSTL-300 S1 a 400 kg 1 m resolution Earth imaging satellite," Proceedings of the13th European Conference on Spacecraft Structures, Materials & Environmental Testing (SSMET), Braunschweig, Germany, April 1-4, 2014, ESA SP-727
12) "Antrix signs agreements for launching satellites from UK and Singapore on-board ISRO's workhorse Polar Satellite Launch Vehicle (PSLV) ," ISRO, Feb. 06,2014, URL: https://web.archive.org/web/20140714215746/http://www.isro.org/scripts/news-6-2-14.aspx
13) "PSLV-C28 / DMC3 Mission," ISRO, URL: http://www.isro.gov.in/launcher/pslv-c28-dmc3-mission
14) "SSTL announces the successful launch of the DMC3/TripleSat Satellite Constellation," SSTL, July 10, 2015, URL: https://www.sstl.co.uk/media-hub/latest-news/2015/sstl-announces-the-successful-launch-of-the-dmc3-triplesat-constellation
15) "New sub 1 meter San Francisco image acquired by SSTL S1-4," SSTL News, 3 February 2020, URL: https://www.sstl.co.uk/media-hub/latest-news/2020/new
-sub-1-metre-san-francisco-image-acquired-by-ss
16) "Airbus further strengthens its Earth observation imagery portfolio with the addition of TripleSat satellite data," EARSC (European Association of Remote Sensing Companies) , 10 April 2018, URL: http://earsc.org/news/airbus-further-strengthens-its-earth-observation-imagery-portfolio-with-the-addition-of-triplesat-satellite-data
17) "A New SSTL-S1 Satellite EO Data Contract Signed Between SSTL and 21AT," Satnews Daily, 5 Feb. 2018, URL: http://www.satnews.com/story.php?number=1952793509#
18) "SSTL and 21AT announce new Earth Observation data contract," SSTL, 02 Feb. 2018, URL: https://web.archive.org/web/20240603091615/https://www.sstl.co.uk/media-hub/latest-news/2018/sstl-and-21at-announce-new-earth-observation-data-contract
19) "TripleSat – A New Opportunity for You," Airbus DS, December 2017, URL: http://www.intelligence-airbusds.com/en/8079-triplesat
20) "UrtheCast and Twenty First Aerospace Technology Sign a Strategic Partnership for UrtheDaily™ Constellation in China," Deimos Imaging, 5 Dec. 2017, URL: http://www.deimos-imaging.com/urthecast-and-twenty-first-aerospace-technology-
sign-a-strategic-partnership-for-urthedailytm-constellation-in-china
21) Nimal Navarathinam, Andrew Cawthorne, Luis Gomes, Martin Sweeting, John Paffet, "DMC3 and Carbonite-1: Two Sides of Small Satellites," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-III-10, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3354&context=smallsat
22) "21AT Celebrates Anniversary of the TripleSat Constellation Launch," 21AT, July 10, 2016, URL: http://www.21at.com.cn/en/Aboutus/News&Events/201607/t20160711_30920.html
23) Information provided by Joelle Sykes, communications manager at SSTL.
24) "SSTL's DMC3 Constellation demonstrates 1-meter capability," SSTL Press Release, Sept. 16, 2015, URL: https://www.sstl.co.uk/getmedia/8409bb96-55f6-4eaa-ac9d-180908f4c411/PR-DMC3-Constellation-first-image-FINAL-COPY.pdf?ext=.pdf
25) Ryan Kraliz, "Multi-Screw Focusing Mechanism for DMC3 Sub-1 m Imager," Proceedings of the 15th ESMATS (European Space Mechanisms and Tribology Symposium) 2013, Noordwijk, The Netherlands, Sept. 25-27, 2013, ESA, SP-718, URL: http://www.esmats.eu/esmatspapers/pastpapers/pdfs/2013/kraliz.pdf
26) Qiang Wen, Jianjun He, Shengyong Guan, Ting Chen, Yin Hu, Wenbin Wu, Feng Liu, Yuexia Qiao, Suet Yheng Kok & Samuel Yeong, "The TripleSat constellation: a new geospatial data service model," Geo-spatial Information Science, June 2017, Vol. 20, No 2, pp: 163-173, DOI: 10.1080/10095020.2017.1329266, URL: http://www.tandfonline.com/doi/pdf/10.1080/10095020.2017.1329266?needAccess=true
27) " SSTL and 21AT announce new Earth Observation data contract," SSTL Press Release, 2 February 2018, URL: https://www.sstl.co.uk/media-hub/latest-news/2018/sstl-
and-21at-announce-new-earth-observation-data-
28) PSLV-C42 Mission," ISRO, 16 September 2018, URL: https://www.isro.gov.in/mission_PSLV_C42.html
29) "SSTL confirms the successful launch of NovaSAR-1 and SSTL S1-4 satellites," SSTL Press Release, 16 September 2018, URL: https://www.sstl.co.uk/media-hub/latest-news/2018/sstl-confirms
-the-successful-launch-of-novasar-1-a