Delfi-n3Xt (Delfi Triple CubeSat NeXt)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 21 Nov 2013 |
| End of life date | 21 Feb 2014 |
Delfi-n3Xt (Delfi Triple CubeSat NeXt) mission
Overview Spacecraft Launch Mission Status Experiment Complement References
The Delfi-n3Xt project is the second in line of a series of small satellite projects within the Delfi program initiated by the Delft University of Technology (TU Delft), The Netherlands. It is the successor of the Delfi-C3 nanosatellite which was launched successfully on April 28, 2008. The primary mission objectives of Delfi-n3Xt are education, technology demonstration (payloads) and advancement of nanosatellite bus subsystems; the project started in November 2007. Over 75 students have been participating so far in the Delfi program. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10)
The name Delfi-n3Xt relates to the 3 unit CubeSat size (as in Delfi-C3), 3-axis (3X) attitude control, and the fact that it is the "next" satellite.
Delfi-n3Xt carries on board five payloads that occupy roughly 50% of the spacecraft volume. The goals of the satellite mission comprise the demonstration of the following systems:
• Pre-qualification of T3µPS micropropulsion system from TNO (Netherlands Organization for Applied Scientific Research), TU Delft, and UTwente (University of Twente), Enschede, The Netherlands
• Pre-qualification of a Multifunctional Particle Spectrometer (MPS) from Cosine Research BV, Leiden, The Netherlands
• Scientific Radiation Experiment of Si solar cells from DIMES (Delft Institute of Microelectronics and Submicron Technology)
• Qualification of a high-efficiency modular communications platform from ISIS (Innovative Solutions in Space) BV, Delft, referred to as ITRX (ISIS Transceiver)
• Proof-of-concept for a radiation risk-free implementation of commercial solid-state data storage devices, provided by NLR (Nationaal Lucht- en Ruimtevaartlaboratorium - National Aerospace Laboratory), Amsterdam.
Spacecraft
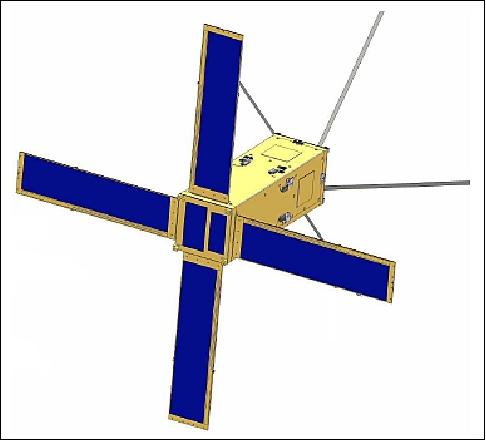
The nanosatellite is a triple CubeSat (or 3U) design with a size of 10 cm x 10 cm x 34 cm. Compared to the first satellite in this program, Delfi-C3, Delfi-n3Xt will additionally be equipped with batteries, an active ADCS (Attitude Determination and Control Subsystem), and a high-speed S-band transmitter.
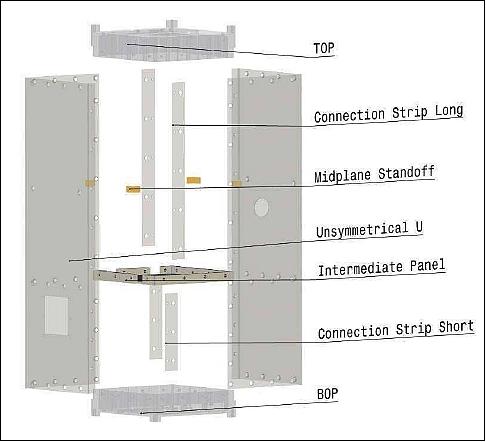
Delfi-n3XT uses a custom-designed structure (with at least two proper grounding points on the structure) to provide more flexibility and accessibility than was provided by the Pumpkin 3U structure of the Delfi-C3 mission. For the Delfi-n3Xt development, it was decided to start bread boarding and prototyping early in the detailed design phase, taking several design iterations of electrical circuits and PCB (Printed Circuit Board) design into account. Special emphasis is placed on the reliability of the interfaces between the subsystems, like the I2C communication between the onboard computer en the local subsystem controllers and the electrical power supply system. Both interfaces are using node protection circuits at each electrical subsystem to ensure the overall reliability of the system and avoid single points of failure. 11)
The mechanical design of the PCB's for Delfi-n3Xt has been reduced to 90 mm x 90 mm with a symmetrical hole pattern and fixed locations for the connectors. With a slightly smaller PCB, more room is available between the structure and the PCB's for the magnetorquers and electrical harness.
Spacecraft mass, size | 3.5 kg, 100 mm x 100 mm x 340.4 mm (3U CubeSat) |
ADCS Attitude Determination and Control Subsystem) | 3-axis stabilization |
EPS (Electrical Power Subsystem) | Photovoltaic array (4 deployable panels) and batteries providing 12 W of average power |
Structure subsystem | Improved structure for better accessibility |
Thermal subsystem | Passive |
C&DHS (Command & Data Handling Subsystem) | fail-safe I2C data bus (100 kbit/s) |
RF communications | 1.2 kbit/s downlink in VHF |
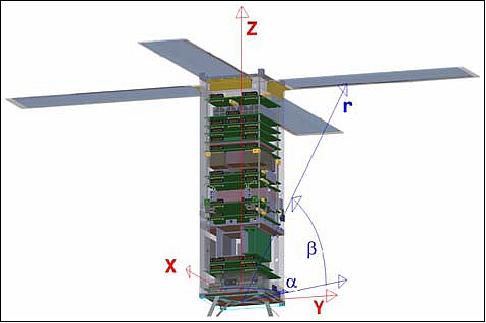
ADCS (Attitude Determination and Control Subsystem): The ADCS provides active 3-axis control of the spacecraft. Attitude is sensed by sun sensors, magnetometers and optionally gyroscopes. Actuation is provided by reaction wheels and magnetorquers. The ADCS has to provide four operational modes: 12) 13) 14) 15)
- Detumble mode: the detumble mode is activated after deployment in which the rotational rates of the nanosatellite are reduced.
- FSP (Fine Sun Pointing) mode: in this nominal operational mode the solar panels are pointed into the sun (within 25º).
- Observation mode: the MPS (Multifunctional Particle Spectrometer) is providing measurements in this mode
- TP (Thruster Pointing) mode: the thrust vector of the microthruster (T3µPS) will be aligned with the velocity vector to maximize the effective thrust
- GST (Ground Station Tracking) mode: the directional S-band antenna will be pointed to the Delft ground station (when a ground station is approaching).
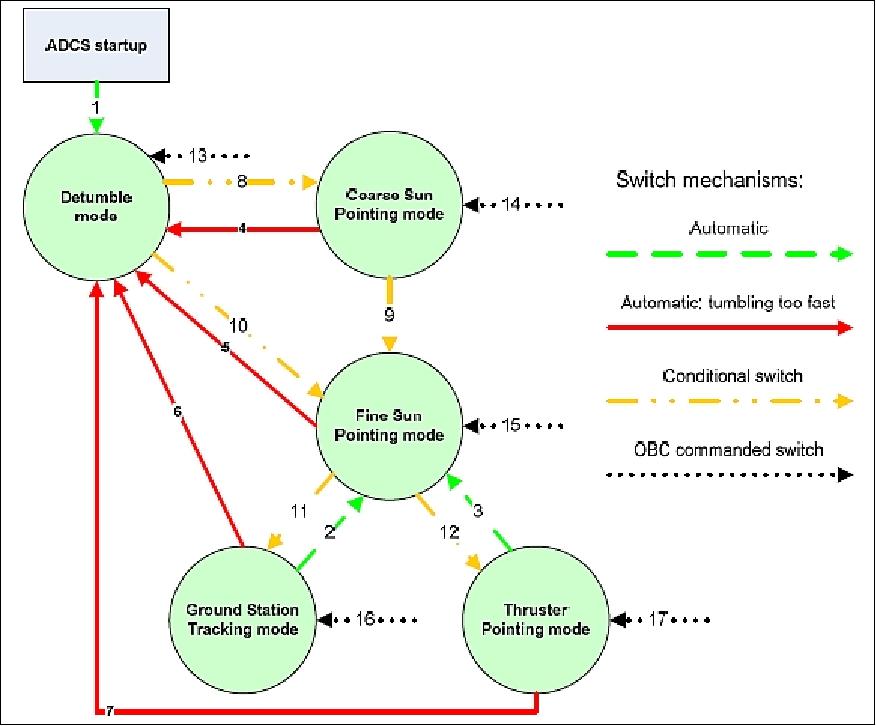
When the rotational rates in any of the pointing modes exceeds a given limit the ADCS switches back to the Detumble mode, which acts as the safe mode.
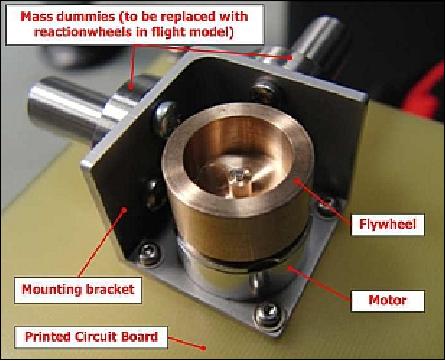
The actuator suite of the ADCS consists of two magnetorquer coils and three orthogonal reaction wheels, both developed at the TU Delft. The lubricant of the reaction wheels is replaced by the manufacturer to withstand the space environment. A CNC-milled flywheel of bronze is placed on the axis of the motor to provide the required momentum storage. The flywheel is optimized for a high mass moment of inertia per unit mass. Attitude sensing is provided by: a redundant set of commercial triple-axis magnetometers from Honeywell, and a set of six sun sensors which are developed at TU Delft.
The spacecraft pointing accuracy is within 3º. Slewing maneuvers can be performed for ground station tracking of the S-band antenna with 5º accuracy.
The magnetorquers are designed to dump momentum of the spacecraft and the reaction wheels. A torquer is a simple electric coil, which gives a magnetic moment when electric current flows through it. Together with the Earth magnetic field, a torque can be created in the axes orthogonal to the magnetic field line.
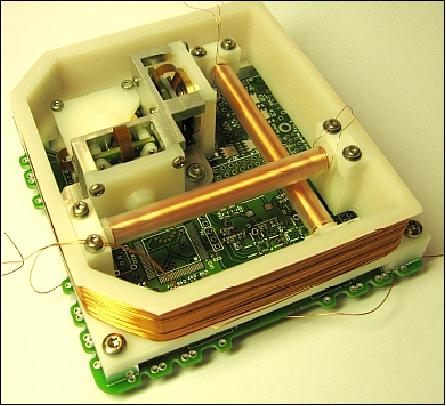
The magnetorquer structure and the reaction wheel structure are integrated into the same volume, directly on top of the printed circuit board with the magnetometers, microprocessors, drive electronics and interface connectors to the sun sensors. This unique design combines one of the smallest volume for an active three-axis ADCS ever while still maintaining a modular approach such that the reaction wheels and magnetorquers can be assembled and tested separately (Figure 6). The volume occupied by the ADCS is less than 10% of the entire satellite. Considering the fact that this system is suitable for advanced pointing modes and tracking maneuvers.
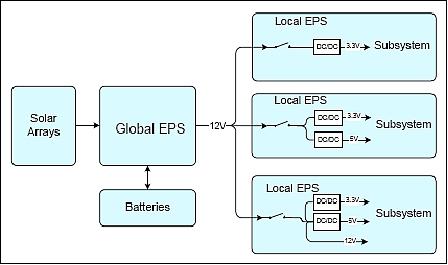
EPS (Electric Power Subsystem): EPS provides, stores and distributes spacecraft electrical power. Delfi-n3Xt has set a development goal of creating a single-point failure free EPS with energy storage. The EPS consists of solar panels, a battery system, a central power conditioning and management system called GEPS (Global EPS) and local power control. Figure 7 provides an overview of the distributed EPS of Delfi-Next, with the G-EPS supplying all subsystems with a single supply voltage and local power control switching the subsystems and the providing the required supply voltages to the subsystem components.
Power budget: The EPS is designed on the required power of the subsystems in the nominal mode (Table 2) in which the satellite will be operating for most of the time (>95%). If the ITRX (ISIS Transceiver) or STX (S-band Transmitter) is used, the PTRX (Primary Transceiver) will be turned off, yielding an almost power neutral mode transition. Only the ignition of a CGG of the T3µPS microthruster consumes considerable amount of power (~10 W), but this will only last for about 10 seconds which has an insignificant impact on the energy storage of the batteries. All other satellite modes consume less than the nominal mode.
Subsystem | Mode | Power requirement (mW) |
T3µPS (micro Propulsion Subsystem) | Measuring | 255 |
Total | Nominal | 4242 |
Solar panels: Use of triple junction solar cells (GaInP2/GaAs/Ge) arrays. A (deployable) solar panel with dimensions compatible with the long side of the satellite can contain 7 of these cells. A single panel can deliver 5453 mW of power. MPPT (Maximum Power Point Trackers) are used. Furthermore, for energy storage four Li-ion batteries will provide enough capacity for full eclipse operations.
A regulated single supply voltage of 12 Volt is used for all subsystems. The main reason to go for a single supply voltage is to keep the system bus interfaces to a minimum in order to limit wiring harness and complexity and to standardize the system bus interface. This main power line is protected by the standard system bus interface.
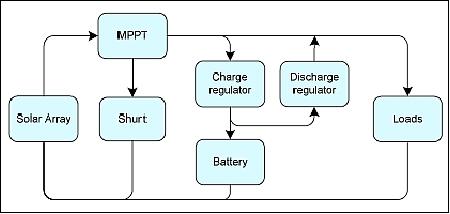
Figure 8 provides a schematic overview of the G-EPS. There are four redundant chains in the G-EPS connected to the main system bus which supplies the power to the loads. In case of a single-point-failure in one of the chains, the other remaining chains will still supply 75% of the power on average which will be sufficient for nominal operation during the sunlit part of the orbit.
CDHS (Command and Data Handling Subsystem): It receives, validates, decodes, and distributes commands to other spacecraft systems and gathers, processes, and formats spacecraft housekeeping and mission data for downlink or use by the OBC (On-Board Computer). The OBC is custom-built consisting of a redundant microcontroller (MSP430F1611 of Texas Instruments), a real-time clock, data storage and support electronics.
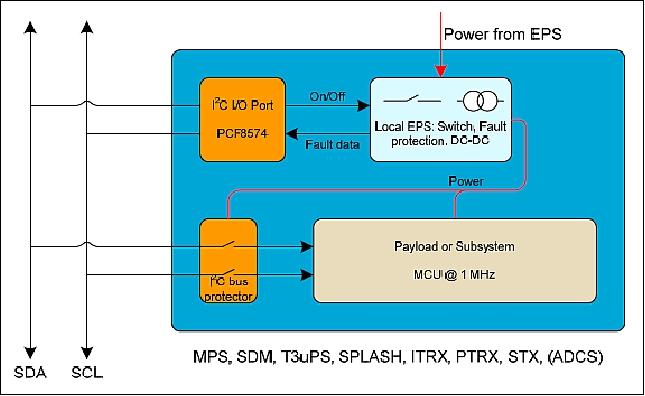
The I2C bus and communications protocol are being used. With all payloads and subsystems taken into account, the bus is expected to have 19 nodes, including the OBC as the bus master. The I2C bus is a multi-master serial bus based on two open drain wires, one for the data (SDA) and one for the clock (SCL), both pulled up via resistors. Some important changes to the I2C bus have been made to improve the reliability of the system.
In the former Delfi-C3 implementation, the communication hiccups are heavily influenced by slow PIC microcontrollers attached to the local EPS switch on each node. Hence, in this next version of the satellite (Delfi-n3Xt), the implementation will substitute these PIC microcontrollers with I/O ports (PCF8574) controlled directly via I2C commands, which consume around 13 times less power (60 µW ‐ 600 µW to 8 mW for the PIC) and can handle speeds of 100 kbit/s, unlike the PIC's which handled 15 kbit/s. This bus architecture is shown in Figure 9. Another innovation in the design is the inclusion of bus protector circuits for 12 nodes on the bus, mostly the microcontrollers in each subsystem (Ref. 13).
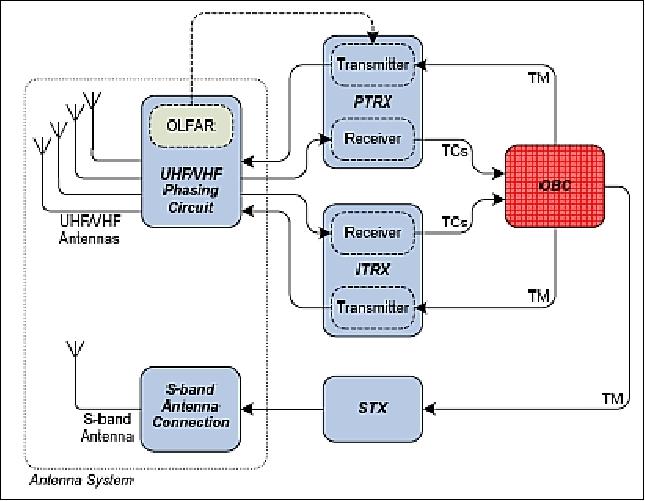
RF communications: The Comms (Communication Subsystem) will carry no less than three radios: the primary transceiver PTRX, the payload ITRX (ISIS Transceiver), and the high-speed STX (S-band Transmitter).
• The PTRX (Primary Transceiver) provides an UHF (435 MHz) uplink at 600 or 1200 bit/s. The downlink is in VHF (145 MHz) at 1.2 or 2.4 kbit/s. The PTRX is of Delfi-C3 heritage. The PTRX is further complimented with a linear transponder (UHF up, VHF down) as a return of favor to radio amateurs and might also be equipped with an experimental OLFAR (Orbiting Low Frequency ARray) transponder for very low frequencies.
• The ITRX transceiver features an UHF (435 MHz) uplink at 1.2 kbit/s and a variable VHF (145 MHz) downlink between 1.2 to 9.6 kbit/s. ITRX serves as backup radio for the PTRX.
• The STX (S-band Transmitter) of 2.4 GHz provides variable downlink data rates between 9.6 and 250 kbit/s. STX is a technology demonstration. The goal is to develop nanosatellite technology which can yield much higher data rates and to determine how a practical link can be improved to achieve the highest data downlink volumes possible. To make this link more useful than just experimental, all data sent to the PTRX is also stored on the STX. The STX can be requested to resent the packets of a specific time window to obtain missing packets from times in which there was no ground station able to receive the telemetry. The reason this data buffer is located at the STX rather than the OBC is because the STX can have higher data rates than is possible over the I2C data bus at this moment.
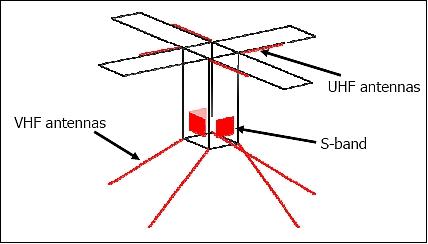
In addition, there is the antenna subsystem consisting of at least 9 antennas. Four UHF uplink antennas are positioned alongside the solar panels, and four VHF downlink antennas are mounted canted turnstile at the far end of the satellite. The high-speed S-band downlink will use one or multiple patch antennas.
Launch
The Delfi-n3Xt nanosatellite was launched on Nov. 21, 2013 as a secondary payload on a Dnepr-1 vehicle from the Yasny Cosmodrome in Russia. The launch provider was ISC Kosmotras of Moscow. The primary payloads on the flight were: DubaiSat-2 of EIAST, Dubai (mass of ~ 300 kg) and STSat-3 (Science and Technology Satellite-3) of KARI, Korea (mass of ~ 150 kg). 16) 17) 18) 19) 20)
On October 31, 2011, TU Delft signed a launch contract with Innovative Solutions in Space-ISIS BV for the launch of Delfi-n3Xt.
Secondary Payloads
• SkySat-1 of Skybox Imaging Inc., Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• WNISat-1 (Weathernews Inc. Satellite-1), a nanosatellite (10 kg) of Axelspace, Tokyo, Japan.
• BRITE-PL-1, a nanosatellite (7 kg) of SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland.
• AprizeSat-7 and AprizeSat-8, nanosatellites of AprizeSat. AprizeSat-7 and 8 are the ninth and tenth satellites launched as part of the AprizeSat constellation, operated by AprizeSat. The constellation, which was originally named LatinSat, was initially operated by Aprize Argentina; however ownership of the constellation was later transferred to their US parent company AprizeSat. The AprizeSat constellation is used for store-dump communications, and some satellites carry AIS (Automatic Identification System) payloads for Canadian company ExactEarth. The AprizeSat spacecraft were built by SpaceQuest Ltd. Of Fairfax, VA, USA, and each has a mass of 12 kg. 21)
• UniSat-5, a microsatellite of the University of Rome (Universita di Roma "La Sapienza", Scuola di Ingegneria Aerospaziale). The microsatellite has a mass of 28 kg and a size of 50 cm x 50 cm x 50 cm. When on orbit, UniSat-5 will deploy the following satellites with 2 PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployer) of GAUSS:
- PEPPOD 1: ICube-1, a CubeSat of PIST (Pakistan Institute of Space Technology), Islamabad, Pakistan; HumSat-D (Humanitarian Satellite Network-Demonstrator), a CubeSat of the University of Vigo, Spain; PUCPSat-1 (Pontificia Universidad Católica del Perú-Satellite), a 1U CubeSat of INRAS (Institute for Radio Astronomy), Lima, Peru; Note: PUCPSat-1 intends to subsequently release a further satellite Pocket-PUCP) when deployed on orbit. 22)
- PEPPOD 2: Dove-4, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
MRFOD (Morehead-Roma FemtoSat Orbital Deployer) of MSU (Morehead State University) is a further deployer system on UniSat-5 which will deploy the following femtosats:
- Eagle-1 (BeakerSat), a 1.5U PocketQube, and Eagle-2 ($50SAT) a 2.5U PocketQube, these are two FemtoSats of MSU (Morehead State University) and Kentucky Space; Wren, a FemoSat (1U PocketQub) of StaDoKo UG, Aachen, Germany; and QBSout-1S, a 2.5U PocketQub of the University of Maryland testing a finely pointing sun sensor.
• Delfi-n3Xt, a nanosatellite (3.5 kg) of TU Delft (Delft University of Technology), The Netherlands.
• Triton-1 nanosatellite (3U CubeSat) of ISIS-BV, The Netherlands
• CINEMA-2 and CINEMA-3, nanosatellites (4 kg each) developed by KHU (Kyung Hee University), Seoul, Korea for the TRIO-CINEMA constellation.
• GOMX-1, a 2U CubeSat of GomSpace ApS of Aalborg, Denmark
• NEE-02 Krysaor, a CubeSat of EXA (Ecuadorian Civilian Space Agency)
• FUNCube-1, a CubeSat of AMSAT UK
• HiNCube (Hogskolen i Narvik CubeSat), a CubeSat of NUC (Narvik University College), Narvik, Norway.
• ZACUBE-1 (South Africa CubeSat-1), a 1U CubeSat (1.2 kg) of CPUT (Cape Peninsula University of Technology), Cape Town, South Africa.
• UWE-3, a CubeSat of the University of Würzburg, Germany. Test of an active ADCS for CubeSats.
• First-MOVE (Munich Orbital Verification Experiment), a CubeSat of TUM (Technische Universität München), Germany.
• Velox-P2, a 1U CubeSat of NTU (Nanyang Technological University), Singapore.
• OPTOS (Optical nanosatellite), a 3U CubeSat of INTA (Instituto Nacional de Tecnica Aerospacial), the Spanish Space Agency, Madrid.
• Dove-3, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
• CubeBug-2, a 2U CubeSat from Argentina (sponsored by the Argentinian Ministry of Science, Technology and Productive Innovation) which will serve as a demonstrator for a new CubeSat platform design.
• BPA-3 (Blok Perspektivnoy Avioniki-3) — or Advanced Avionics Unit-3) of Hartron-Arkos, Ukraine.
Deployment of CubeSats: Use of 9 ISIPODs of ISIS BV, 3 XPODs of UTIAS/SFL, 2 PEPPODs of GAUSS, and 1 MRFOD of MSU.
Orbit: Sun-synchronous near-circular orbit, altitude = 600 km, inclination = 97.8º, LTDN (Local Time on Descending Node) = 10:30 hours.
Mission Status
• Delfi-n3Xt has achieved its mission success after having gathered three months of onboard measurement data and having executed all foreseen technology demonstration experiments. After mission success was achieved, an experiment caused a ("temporary") loss of the Delfi-n3Xt downlink which is currently still under investigation. 23)
- Delfi-n3Xt has stopped transmission since a transponder test which was executed at 3 months of operations. The transponder was a "bonus"-functionality and the mission was already successful. The root cause is still under investigation, but an electric fault on the data bus caused by the transponder is the current hypothesis.
- Sept. 15, 2014: Unfortunately nothing changed since Feb. 21, 2014. The chances that the project will regain contact are getting slim, but there is still one thing left which can be tried and where an update of the ground station is needed (to be specific, a fully automated uplink capability is needed; however, some safety issues have to be dealt with first). 24) 25)
• T3µPS In-orbit Results (Ref. 29): Shortly after the launch of Delfi-n3Xt, experiments with the T3µPS were performed. The pressure vs. Data point plot for the first months of operation is given in Figure 12. The data points coincide with time. In the first phase until the ignition and decomposition of the first CGG the pressure sensor, the temperature sensor and the operation of the valve were tested and shown to be operating within specifications. The plenum was launched with approximately 1 bar of pressure inside and this was released till 711 mbar with the first actuation of the valve. On November 26, 2013, the first cool gas generator was successfully ignited and decomposed producing gas. The ignition required 10.1 W of power for 10 seconds and was therefore well within specification. Unfortunately, a flaw in the software transforming the pressure data into digits caused that pressures above 3000 mbar are not recorded.
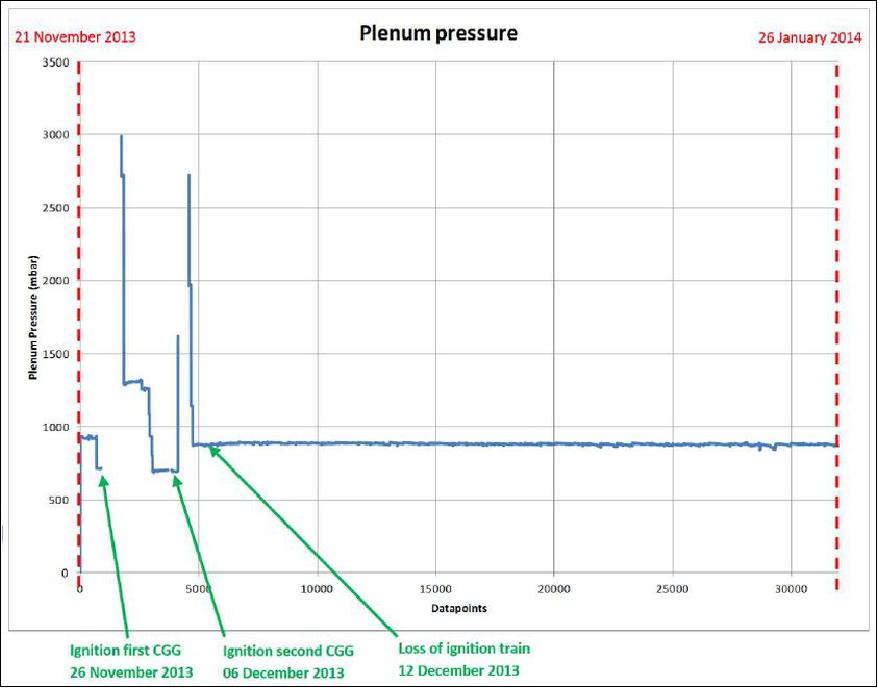
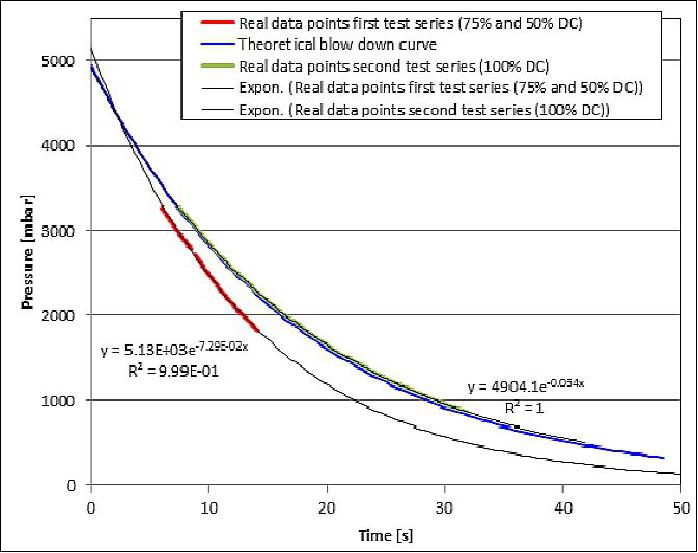
The maximum pressure reached can be approximated by examining the pressure vs. time curves of the gas release given in Figure 13. The valve was opened delivering thrust on November 29, 2013 with duty cycles of 75% and 50% and again on December 3, dropping the pressure to around 700 mbar before ignition of the second CGG. The opening of the valve and the subsequent lowering of the pressure inside the plenum indicate that gas is being expelled and thrust being delivered.
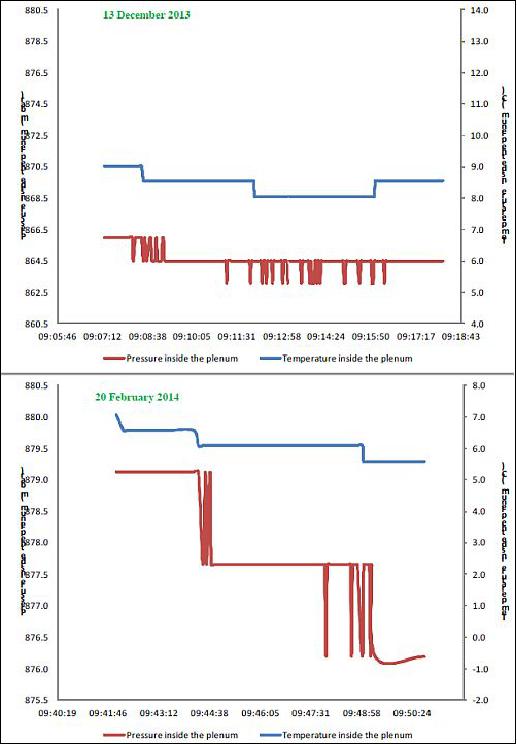
The second cool gas generator was successfully ignited and decomposed on December 6, 2013. Ignition required 10.3 W of power for 8 seconds and was again well within specification. The successful ignition was followed by a second thrust series, this time with 100% open valve to determine the complete thrust curve accurately. The valve was opened delivering thrust on December 9, 2013. The pressure vs. time curve is also given in Figure 13. On Dec. 12, the third CGG was scheduled to be ignited, but no response was received. All remaining CGG's were tried but no ignition was observed. This indicates that part of the ignition train (which is non-redundant) failed. The sensors and the valve are still operational and not impacted by the anomaly. The remaining gas was left in the plenum to further evaluate the leak tightness of the plenum. The temperature and time curves at the start of the leak tightness verification period and at the end are given in Figure 14.
Figure 13 shows the actual data point together with the logarithmic trend-lines of the two thrust series. The red line concerns the first combination of thrusts with 50% and 75% duty cycle. The green line concerns the thrust at 100% duty cycle. The 100% duty cycle has the valve fully open and it follows near completely the theoretical blow down curve (given as a blue line). The curve with the 50% and 75% duty cycle indicate the valve is 50% or 75% of the time open. In actuality the valve is constantly opening and closing and this causes the difference with the theoretical blow down curve. The time that the valve is opening and closing it is already releasing gas and this time is not taken into account in determining this curve. Extrapolation of the 100% duty cycle curves indicates a starting pressure of 4.8 bar. The CGG was ignited with a starting pressure of 0.7 bar the pressure increase was 4.1 bar indicating 97% decomposition.
Figure 14 shows the pressure and the temperature measurements during ~10 minutes at the start and end of the leak tightness verification period. The pressure follows the temperature with some delay as expected. The spikes are due to the resolution of the sensors causing the value to flip back and forth. The starting pressure is 879 mbar at 6.6 °C, the end pressure reached was 864 mbar at 8.5 °C. During the 69 days, there was some leakage. The average leak rate was determined to be 1.0 x 10-7 scc/s at 0.8 bar, which indicates the leak rate to be within specifications (1.5 x 10-6 scc/s at 5.5 bar).
T3µPS demonstration: In summary, the failure of most likely the ignition train was an unfortunate set-back which has already been resolved in the new generation of the electronics. Even so, most of the experimental objectives have been reached as is described in Table 3. Overall the mission was a success with the main objective and up to 80% of the primary objectives met.
Identifier | Test objective | Reached ? |
PO-01 | To verify that the propulsion system is able to ignite all CGGs individually upon request | No, 2 have been successfully fired after which the ignition train malfunctioned. |
PO-02 | To verify that the propulsion system is able to store the gas that is released from a CGG until it is used for thrusting | Yes. |
PO-03 | To verify that the system is able to communicate with the satellite to get instructions and to send telemetry data | Yes, telemetry was being received up until the end of satellite contact. All systems could be commanded. |
PO-04 | To verify the system is able to monitor pressure and temperature inside the plenum | Yes, the temperature and pressure were being monitored continuously. |
PO-05 | To verify the system is able to monitor power consumption of the total propulsion system, of the CGG igniters and the main valve | Yes, part of the data was received through other satellite systems. |
PO-06 | To verify that the system is able to thrust at variable impulse | Yes, thrust has been delivered at 3 different impulse levels. |
• January 24, 2014: Delfi-n3Xt is currently in orbit for more than two months. It is fully operational since its launch on November 21, 2013. At the Delft ground station, as well as at radio amateur stations all around the world, data is collected daily of the experiments and subsystems onboard (Ref. 24).
- For TNO, a cold gas based micro-propulsion system is tested. Two cold gas generators have been fired already and ten thrust events have been performed and recorded with detailed pressure and temperature measurements. According to TNO, this already has proven a successful demonstration of their system. The amorphous silicon solar cells of DIMES (Delft Institute of Microelectronics and Submicron Technology) are continuously monitored and provide perfect characteristic data. The innovative CubeSat radio of ISIS (Innovative Solutions in Space) BV, Delft proves to function well and this latest technology will soon enter the commercial market.
- Compared to Delfi-C3, Delfi-n3Xt is advanced with an custom developed robust command and data handling and an active attitude control. The data handling indeed proves to be more robust than that on Delfi-C3, thereby significantly easing the operations and data analysis. All sensors and actuators of the attitude control system are working correctly.
- In the coming months, tuning of the attitude control parameters will be done to perform more experiments on this system. Also on other subsystems, experiments will be performed such that this can be used for scientific use and/or development of the next mission, DelFFi (TU Delft Formation Flying Mission). Delfi-n3Xt already performed a major part of its mission and everything indicates that it may be operational for a long time just like its predecessor Delfi-C3 (Ref. 24).
Experiment Complement
The experiment complement represents a challenging task of enabling technology demonstrations to be introduced on a level of a nanosatellite design and implementation. The institutions/companies listed for the various payloads represent also the project partners for the Delfi-n3Xt mission. 26)
T3µPS (TNO, TU Delft, & UTwente Micropropulsion System)
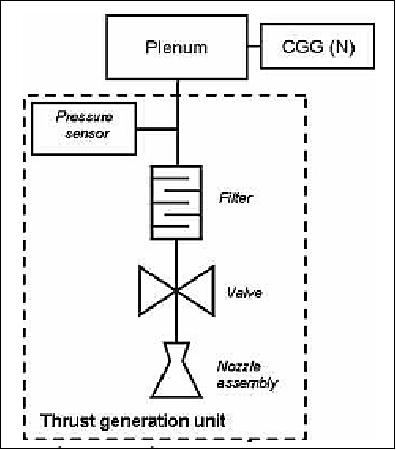
The T3µPS experiment is developed within the scope of the Dutch MicroNed program with the objective to advance microtechnology research in the Netherlands. A team of TNO, UTwente and TU Delft is developing a micropropulsion system to fit into a CubeSat. Note: MicroNed is a Dutch program that aims to develop and disseminate knowledge in the field of micro systems technology and MEMS. The T3µPS system consists of four basic components: 27)
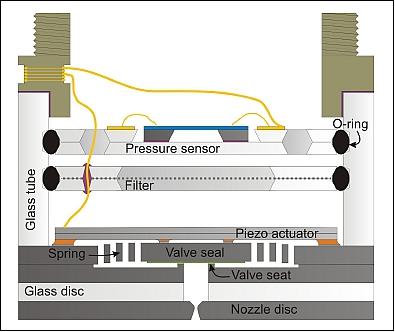
1) MEMS (Micro-Electro-Mechanical Systems) based valve and nozzle that provides for the thrust. This module also contains a MEMS-based pressure transducer and filter. The latter is to prevent flow blockage due to impurities in the propellant. The pressure transducer is for control purposes.
2) CGG (Cool Gas Generator) which produces the nitrogen gas needed for thrust generation from a solid charge. A CGG can be ignited by a glow plug, avoiding the use of pyrotechnics.
3) Plenum that provides a buffer volume for the nitrogen gas produced by the CGGs and feeds this gas to the thruster. It also provides for the mounting of the MEMS valve and nozzle and one or more CGGs - thereby reducing the amount of piping and brackets.
4) PCB (Printed Circuit Board) that holds the electronics needed to ignite the CGGs and to operate the valve and the pressure transducer. It also provides for mounting of the plenum.
Cold Gas Generators (CGGs) store nitrogen in a solidified form. When electro-thermal energy is added, the nitrogen releases in gaseous state and enters in a plenum which will buffer the pressurized gas. A MEMS (Micro-Electro-Mechanical Systems) based valve and nozzle are used to release the gas into space to provide controlled thrust.

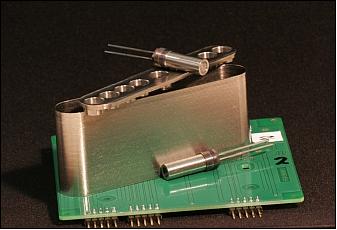
The model shown (Figure 18) allows for eight CGGs to be mounted onto the plenum, which also acts as the main structure of the propulsion system, thus avoiding brackets and piping. The gas generators are ignited separately and each on its own will pressurize the plenum. When the plenum is depleted another CGG can be ignited to re-pressurize it. The device is essentially a a blow-down system with a decreasing pressure and mass flow rate during operation until the plenum is re-pressurized.
System | In-orbit produced nitrogen propellant by cool gas generators (CGGs) |
Specific impulse | > 30 s |
Mass, size | 120 gram, 90 mm x 90 mm x 35 mm |
Operation | Blow down mode |
Thrust | Nominal thrust in range 6 to 100 mN, selectable by manufacturing |
Propellant | Nitrogen from 8 miniaturized CGGs (extendable to 16 CGGs) |
CGG dimensions and mass | Size: 8 mm diameter, 20 mm long |
Power consumption (per mode) | Measuring: 63 mW |
The goal of the project team is to evaluate the performance of the T3µPS device in space. The prime objective is to observe the behavior of the propulsion system and more specifically the ignition behavior of the CGG, the functioning of the MEMS valve and nozzle and the leakage characteristics of the system. A secondary objective is to determine orbital changes due to T3µPS operations.
The propulsion experiment shall commence after in-orbit commissioning. It is planned to have one set of experiments per week which allows sufficient time slots for all other on-board experiments. The T3µPS project team foresees two different thrusting modes:
- Continuous thrust mode, wherein the system provides thrust over a prolonged period of time
- Burst thrust mode wherein the thruster provides short pulses. It is aimed for a minimum impulse bit of 30µNs at a plenum pressure of 4.5 bar.

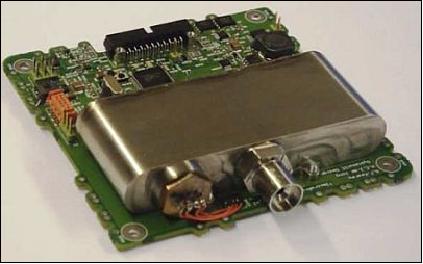
The T3µPS is a micropropulsion system which was developed by TNO in cooperation with TU Delft, the University of Twente and SystematIC design BV. Cold gas generators store nitrogen in a solidified grain. Upon temporary heating this grain, the nitrogen is released as gas and enters a tank volume in which it is pressurized. By opening and closing a valve, continuously or intermittently, the gas exits the micro-machined nozzle and delivers a thrust of up to 6 mN. The flight model of the T3µPS is shown in Figure 20. 29)
The primary objectives of the in-orbit experimental program are given in Table 5. The objectives all concern verification of system performance in space. PO (Primary Objectives) can be seen as supporting objectives to the ultimate objective and that is delivering variable impulse by the propulsion system. These objectives were transformed in ignition, storage, measurement and thrusting events with the strategy of verifying objectives as soon as possible to leave room for secondary objectives.
Identifier | Test objective | Remarks |
PO-01 | To verify that the propulsion system is able to ignite all CGGs individually upon request | To show the system can refill the plenum (gas tank) |
PO-02 | To verify that the propulsion system is able to store the gas that is released from a CGG until it is used for thrusting | To show the system can contain the gas for considerable time |
PO-03 | To verify that the system is able to communicate with the satellite to get instructions and to send telemetry data | To show the system can be controlled through external commands |
PO-04 | To verify the system is able to monitor pressure and temperature inside the plenum | To show that the system sensors give data and feedback on performance |
PO-05 | To verify the system is able to monitor power consumption of the total propulsion system, of the CGG igniters and the main valve | To monitor system performance |
PO-06 | To verify that the system is able to thrust at variable impulse | This is the purpose of the system |
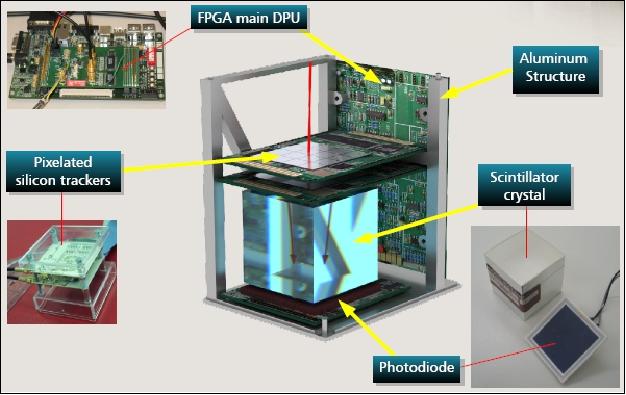
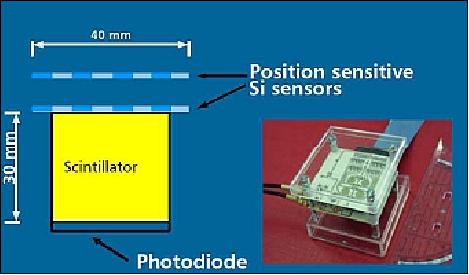
MPS (Multifunctional Particle Spectrometer)
The MPS is a radiation detector that can measure the energy and incidence angle of alpha particles, protons, electrons and gamma radiation. MPS has been designed at Cosine Research as a new type of radiation spectrometer to safeguard the spacecraft and its payload and to obtain key diagnostic data. Since protons, electrons, ions and gamma rays affect systems differently, it must have the ability to separate different particle species. Also since aging and damage effects are very much energy dependent, the device has to be spectrally sensitive over large energy ranges (Ref. 8).
Particles to be measured | γ, e, p, 3He, 4He, C, N, O, Ne |
Energy range of particles | - Gamma rays: 0.1 - 3 MeV |
E resolution (ΔE/E) | - Gamma rays: 10% |
Count rate | - Particle counting: ≤ 10 MHz |
Aperture FOV (Field of View) | 45º |
Mass, power, volume | < 1.25 kg, < 1.5 W, < 1000 cm3 |
The miniaturized MPS discriminates between 4 types of particles and incident angle. It has a mass of 600 g, power consumption of < 2 W, and a volume of 7.5 cm (W) x 7 cm (L) x 8 cm (H). An angular resolution of 10º is provided based on tracker separation. 30) 31)
SDM (Solar cell Degradation Measurement)
The objective of the SDM is to validate the results of a theoretical study on degradation of a new type of solar cells, designed and developed by DIMES. A number of solar cell dots are placed on a surface that faces the sun. The current from each of these solar cells is then a measure for their performance. This current will be monitored for the duration of the mission to determine the degradation of the solar cells. The results will be compared with the predictions of the theoretical study to assess its validity.
Hydrogenated amorphous silicon (a-Si:H) solar cells have great potential for applications in space, because these solar cells can be produced inexpensively, are lightweight, and are relatively radiation hard. In a space environment the solar cell performance degrades partly due to high energy charged-particle irradiation and partly due to the effect of prolonged illumination.
On the other hand, at elevated temperatures the performance degradation is to some extent neutralized. For the utilization of these solar cells in space it is necessary to be able to predict their EOL (End-Of-Life) performance for a given mission in which they are exposed to electron and proton irradiation having a wide range of kinetic energies. For this reason a computer model was developed at Delft University of Technology.
When the a-Si:H cell is irradiated by high-energy charged particles, defects are created in the material that will seriously affect the conductive properties. On the Delfi-n3Xt satellite, a-Si:H solar cells will be mounted ito investigate the change in performance in space. The main objective of this experiment is to monitor the change in solar-cell performance during the first year of the mission and to compare the performance degradation to computer modeling results. In addition, this experiment will contribute to the understanding of defect formation in a-Si:H devices.
Splash (Space flash)
This is an experiment developed by NLR (Dutch Aerospace Laboratory). In nanosatellites, there is an increasing demand of data storage. Several space qualified memory chips are available, but their memory capacity is limited and very expensive. Especially for nanosatellites, COTS (Commercial Off-The-Shelf) memory would be of great benefit.
Splash is a technology for detecting radiation-induced events in CMOS devices and preventing any resulting damage. This should allow the use of CMOS devices such as flash memory cards and normal CMOS processors in space. CMOS technology is susceptible to the radiation environment in space, which can cause single event upsets (SEUs) and single event latch-ups (SEL). However, COTS memory is sensitive to the radiation environment.
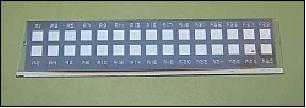
The experiment consists of a number of CMOS memory cards. Current consumption will be monitored for any signs of damage by radiation. In the case of a latch-up event, parts of the memory can be shut to prevent damage to the rest of the system due to overheating. Furthermore, the data in the memory is continuously checked for data corruption by single event upsets. This is done by using existing checksum algorithms.
The NRL Splash system is based on SD (Secure Digital) memory cards, but with additional electronics to make the storage medium immune for radiation (with a nanosatellite lifetime of maximum 2 years). For SEU, additional redundancy bits together with the data will be stored to the SD memory; upon reading the system will extract the data and correct for SEU if needed. For the higher level systems like the Delfi-n3Xt CDHS, the data storage will be transparent. To prevent latch-up, additional miniature electronics will be implemented for protection of the SD cards. The envelop of this system is approximately (50 x 50 x 10) mm.
ITRX (ISIS Transceiver)
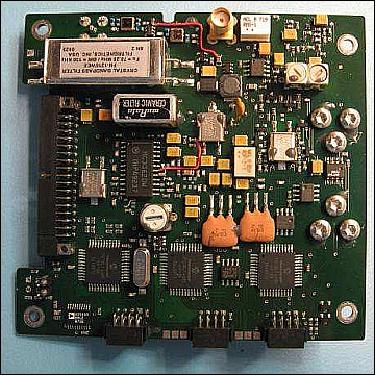
ITRX is an efficient and modular transceiver module of ISIS (Innovative Solutions in Space) BV, Delft, a spin-off company from the Delfi-C3 project. The main improvement of this transceiver in contrast to the former version is a high efficiency power amplifier. The other intention is a highly modular interface design (Ref. 8).
Each nanosatellite has its unique requirements for a radio. Therefore flexibility of choice for key characteristics such as data rate, modulation, output power and data protocol is desired. At the same time these missions have tight financial budgets. The ITRX aims to tackle this with a standardized radio with easy configurability for the key characteristics.
The frequency bands used by the ITRX are VHF for downlink and UHF for uplink. The data rates are 1200 bit/s for uplink and a maximum of 9600 bit/s for the downlink, which can be variable. The maximum transmitter power will be at least 400 mW, but the transmitter power may be varied by a command from the satellite. This is useful for situations when less power is available for transmission.
The main goal is to space qualify the transceiver. Besides flying as a payload, the uplink receiver of the ITRX can be used as a backup command receiver for commanding the satellite. Furthermore, the transceiver will be used for ranging purposes, whereby the transceiver acts as a transponder, and range and range-rate measurements can be taken. The goals of this ranging experiment are to determine the actual accuracy which can be obtained, to see whether TEC (Total Electron Content) models can be used to remove biases introduced by propagation of the radio waves through the ionosphere and to investigate how these measurements can aid in the orbit determination of nanosatellites, which at the moment can be relatively complex due to their small RCS (Radar Cross Section).
Frequency bands | VHF downlink, UHF uplink |
Data rate range | 1200 – 9600 bit/s |
Modulation option | (A)FSK, BPSK, CW, QPSK, MFSK |
Protocol options | AX.25, CW, ISIX, DelfiX, etc. |
Power consumption (nominal) | - Receiver: 255 mW |
Total mass, size | 120 g, 90 mm x 90 mm x 20 mm |
Operation | - Full duplex operation |
Functionality | Telemetry & beacon support |
Ground segment
For Delfi-n3Xt three parts of the ground segment can be identified:
• Delft ground station
• Worldwide radio amateur network
• GENSO (Global Educational Network for Satellite Operations).
The Delft ground station will be upgraded to support S-band transmissions. As for the second option, the cooperation of the worldwide amateur radio community is again welcomed in forwarding telemetry packets that they receive from Delfi-n3Xt to the Delft ground station. For Delfi-C3 operations, the radio amateur network has proved to be an essential component of the ground segment.
When GENSO is operational by the time that Delfi-n3Xt is launched, also the ground stations involved can contribute to receiving telemetry packets.
Item | Delfi-C3 | Delfi-n3Xt |
General characteristics | • 1st Dutch University Satellite | • 2nd Dutch University Satellite |
Attitude Determination & Control | • Passive rotational rate damping | • Active 3-axis control |
Command and Data Handling | • Pumpkin FM430 Onboard Computer, | • 2 redundant OBCs, TI MSP-430 at 8 MHz |
RF communications | • 2 UHF-VHF radios | • UHF-VHF radios, 1 primary, 1 ITRX |
Electrical Power | • 4 panels in omni-directional configuration | • 4 panels in same plane |
Mechanisms | • Autonomous reliable deployment system | • Autonomous reliable deployment system |
Spacecraft structure | • 3U CubeSat structure from Pumpkin | • 3U Custom designed CubeSat structure |
Thermal control | • Passive thermal control | • Passive thermal control |
Payloads | • Three (TFSC, AWSS, RAP) | • Five (ITRX, MPS, SDM, SPLASH, T3µPS) |
Orbit | • Sun-synchronous orbit | • High Inclination orbit |
Physical properties | • Mass: 2.2 kg | • Mass: approx. 3.5 kg |
Launch | • Launch broker: UTIAS | • Launch broker: TBD |
Ground station | • Mission ground station and operations center at TU Delft | • Mission ground station and operations center at |
References
1) Jasper Bouwmeester, Gerard F. Brouwer, Eberhard K. A. Gill, G. L. E. Monna, Jeroen Rotteveel, "Design Status of the Delfi-Next Nanosatellite Project," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10-B4.6B.3
2) http://delfispace.nl/index.php?option=com_content&view=category&layout=blog&id=8&Itemid=20
3) J. Bouwmeester, E. K. A. Gill, C. J. M. Verhoeven, "Advancing Nano-Satellite Platforms: The Delft Program," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.4.B9
4) S. de Jong, G. T. Aalbers, J. Bouwmeester, "Improved Command and Data Handling System for the Delfi-n3Xt nanosatellite," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.D1.4.11
5) J. Bouwmeester, R. J. Hamann, "Delfi‐n3Xt Nanosatellite Subsystems: Buying, Outsourcing or Internal Development," Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7-0905P, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en
_Leerstoelen/Afdeling_SpE/Space_Systems_Eng./Publications/2009/doc/Nummer_16_IAA-B7-0905P_Delfi-n3xt_nanosatellite_subsystems.pdf
6) Jasper Bouwmeester, "Delfi-n3Xt Nanosatellite Mission," NVR/VSV Symposium on Small Satellites in the Netherlands, Feb. 5, 2009, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Nieuws_en
_Agenda/Nieuws/Nieuwsarchief/2009/doc/Delfi-n3Xt_Nanosatellite_Mission,_Jasper_Bouwmeester,_TU_Delft.pdf
7) Martijn de Milliano, "Delfi-n3Xt: the second Delft nano-satellite," July 21, 2008, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en
_Leerstoelen/Afdeling_SpE/Space_Systems_Eng./Projects/Delfi-n3xt/doc/SSE-TUD-PP-0034__1.1__Delfi-n3Xt__AMSAT-UK2008_.pdf
8) S. de Jong, E. Maddox, G. J. Vollmuller, C. A. H. Schuurbiers, R. A. C. M. M. van Swaaij, W. J. Ubbels, R. J. Hamann, "The Delfi-n3Xt Nanosatellite: Space Weather Research and Qualification of Microtechnology," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.D1.I.3, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en
_Leerstoelen/Afdeling_SpE/Space_Systems_Eng./Publications/2008/doc/IAC-08.D1.I.3_Jong_DELFI-N3XT_NANOSATELLITE_SPACE_WEATHER.pdf
9) M. E. A. Genbrugge, R. Teuling, J. M. Kuiper, G. F. Brouwer, J. Bouwmeester, "Configuration Management in Nanosatellites Projects: Evaluation of Delfi-C3 and Consequent Adaptation for Delfi-n3Xt.," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.D1.5.11, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en
_Leerstoelen/Afdeling_SpE/Space_Systems_Eng./Publications/2009/doc/IAC-09_D1_5_4Configuration_Magt_in_nanosatellites_proj%3b_evaluation_of_delfi-c3_and_consequent_adaptation_for_delfi-next.pdf
11) G. F. Brouwer, J. Bouwmeester, "From the Delfi‐C3 Nano‐Satellite Towards the Delfi‐n3Xt Nano‐Satellite," Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-XII-12
12) Stefan Brak, "Delfi-n3Xt: The recipe with an attitude," URL: http://www.lr.tudelft.nl/index.php?id=26540&L=1
13) N. E. Cornejo, J. Bouwmeester, G. N. Gaydadjiev, "Implementation of a reliable data bus for the DELFI nanosatellite program," Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7-0908P, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie
/Afdelingen_en_Leerstoelen/Afdeling_SpE/Space_Systems_Eng./Publications/2009/doc/IAA-B7-0908P_IMPLEMENTATION_OF_A_RELIABLE_DATA_BUS_FOR_THE_DELFI
_NANOSATELLITE_PROGRAMME.pdf
14) J. Bouwmeester, J. P .J. Reijneveld, T. Hoevenaars, D. Choukroun, "Design and Verification of a Very Compact and Versatile Attitude Determination and Control System for the Delft-N3Xt Nanosatellite," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Organisatie/Afdelingen_en
_Leerstoelen/Afdeling_SpE/Space_Systems_Engineering/Publicaties/S4-1-Design
___Verification_of_a_very_Compact___Versatile_Attitude-J_Bouwmeester_284640.pdf
15) J. P. J. Reijneveld, F. J. de Bruijn, D. Choukroun, "A novel reaction wheel unloading algorithm implemented on the Delfi-n3Xt satellite," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
16) "Dnepr Cluster Mission 2013," ISC Kosmotras, Nov. 21, 2013, URL: https://web.archive.org/web/20131125042753/http://www.kosmotras.ru/en/news/149/
17) Patrick Blau, "Dnepr Rocket successfully launches Cluster of 32 Satellites," Spaceflight 101, Nov. 21, 2013, URL: http://www.spaceflight101.com/denpr-2013-cluster-launch-updates.html
18) Robert Christy, "Dnepr Launch 2013 November 21," Zarya, Nov. 21, 2013, URL: http://www.zarya.info/blog/?p=1745
19) "2013 in spaceflight," Wikipedia, Nov. 21, 2013, URL: http://en.wikipedia.org/wiki/2013_in_spaceflight#November
21) "Russian Dnepr conducts record breaking 32 satellite haul," NASA Spaceflight.com, Nov. 21, 2013, URL: http://www.nasaspaceflight.com/2013/11/russian-dnepr-record-breaking-32-satellite-haul/
22) "PUCPSat-1 Satellite Project," URL: http://inras.pucp.edu.pe/pucpsat1/index.html
23) "Delfi-n3Xt Mission," URL: http://www.delfispace.nl/index.php/delfi-n3xt
24) Information provided by Jasper Bouwmeester, Project Manager Delfi-n3Xt, TU Delft.
25) Alejandro I. Lopez Telgie, Jasper Bouwmeester, Frank Stelwagen, "Flight Results and Lessons Learnt from the Delfi-n3Xt Electrical Power Subsystem Operations," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14.B4.3.12
26) "Delfi-n3Xt project page," TUDelft, URL: http://www.lr.tudelft.nl/en/organisation/departments/space-engineering/space-systems-engineering/projects/delfi-n3xt-project-page/
27) C. Müller, L. Perez Lebbink, B. Zandbergen, G. Brouwer, R. Amini, D. Kajon, B. Sanders, "Implementation of the T3µPS in the Delfi-n3Xt satellite," Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7-0705P
28) Erik Laan, "The value of space applications with miniaturized instruments," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B5.2.5
29) Jian Guo, Jasper Bouwmeester, Eberhard Gill, "In-orbit Results of Delfi-n3Xt: Lessons Learned and Move Forward," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B4.6B.3
30) D. Lampridis, "Multifunctional Particle Spectrometer (MPS) on Delfi-n3Xt," NVR/VSV Symposium on small satellites, TU Delft, Feb. 5, 2009, URL: http://www.lr.tudelft.nl/fileadmin/Faculteit/LR/Nieuws_en
_Agenda/Nieuws/Nieuwsarchief/2009/doc/Particle_Spectrometer_Payload_on_Delfi-n3Xt,_Dimitrios_Lampridis,_cosine_Research_BV.pdf
31) "MPS Multifunctional Particle Spectrometer," URL: http://cosine.nl/?id=mps
32) "ISIS Small Satellite Transceiver," Brochure, URL: http://www.isispace.nl/media/products/TRANSCEIVER/Brochure_ISIS_Transceiver.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Experiment Complement References Back to top