Deimos-2/GeoSat-2
EO
High resolution optical imagers
Land
Multi-purpose imagery (land)
Deimos-2 is a continuation of the Deimos-1 mission by the Spanish company Elecnor providing high-resolution Earth observation imagery. The satellite functions as a multi-purpose land imager that has specific applications in the measurement of land processes such as biomass, land cover and vegetation properties. Launched in June 2019, Deimos-2 has a nominal mission lifetime of seven years with a goal to be operational for a total of ten years. In 2021, the company GEOSAT acquired Deimos-1 & 2, and renamed them to GEOSAT-1 & 2, respectively.
Quick facts
Overview
| Mission type | EO |
| Agency | GEOSAT |
| Mission status | Operational (nominal) |
| Launch date | 19 Jun 2014 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery |
| Instruments | HiRAIS |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See Deimos-2/GeoSat-2 summary |
Related Resources

Summary
Mission Capabilities
The central instrument for the GeoSat-2 mission is the High Resolution Advanced Imaging System (HiRAS) which is a pushbroom type imager that conducts vegetation measurements in Fraction of Absorbed Photosynthetically Active Radiation (FAPAR), Leaf Area Index (LAI) and Normalised Difference Vegetation Index (NDVI). The instrument contains three elements: the Electro-optical Subsystem (EOS), the Solid-State Recorder Unit (SSRU), and the Image Transmission Unit (ITU) which collectively function to image, record and transmit image data, respectively. The optical payload has one panchromatic band and four multispectral bands in red, green, blue and near-infrared.
Performance Specifications
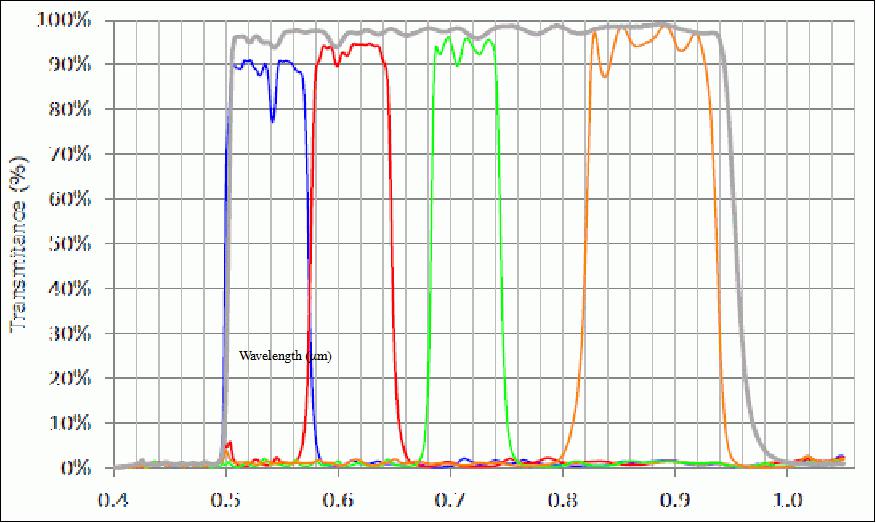
The High Resolution Advanced Imaging System (HiRAS) instrument has five spectral bands: one panchromatic band (450-900 nm), one blue multispectral band (420 - 510 nm), one green multispectral band (510 - 580 nm), one red multispectral band (600 - 720 nm), and one near-infrared band (NIR) (760 - 890 nm). The instrument has an aperture of 0.42 m in diameter, a focal length of 5.75 m, and a field of view of 1.2°. The swath width is 12 km at nadir and 24 km in wide area mode, with a resolution of 1 m for panchromatic imagery and 4 m for the four multispectral bands.
GeoSat-2 is in a sun-synchronous near-circular orbit at an altitude of 630km and an inclination of 98°. The satellite provides a 4-day revisit time that is enabled by the ±45° maximum off-nadir pointing capability.
Space & Hardware Components
GeoSat-2 contains a ground segment that is based on the Ground Segment for Earth Observation (gs4EO) product line. The gs4EO software package is responsible for the customisation of the ground segment operations. This software allows GeoSat-2 to function as a collective segment that ensures the maintenance, accuracy and transmission of image data for end-users. There are also numerous other software packages included in the 4EO software suite that enables the Demios-2 mission to function: User4EO, Plan4EO, Fly4EO, Control4EO, Track4EO, Archive4EO, Process4EO, Monitor4EO and CalVal4EO.
The GeoSat-2 mission also utilises Decentralised Repositories for Transparent and Efficient Virtual Machine Operations (ENTICE) that function as data processing and distribution infrastructure for Earth Observation imaging data.
GeoSat-2
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
GeoSat-2, previously known as Deimos-2, is a follow-on imaging mission of Deimos-1 Imaging S. L. U., an Elecnor company of Boecillo, Spain. The GeoSat-2 mission is aimed at operating an agile minisatellite for high-resolution EO (Earth Observation) applications. The agile spacecraft can be steered to accurately point the pushbroom-type optical payload, which can provide 1 m panchromatic and 4 m multispectral images in a swath of 12 km at nadir, at an orbit altitude of ~600 km. The multispectral capability includes 4 channels in the visible and near-infrared spectral range (red, green, blue and NIR). 1) 2) 3) 4) 5) 6)
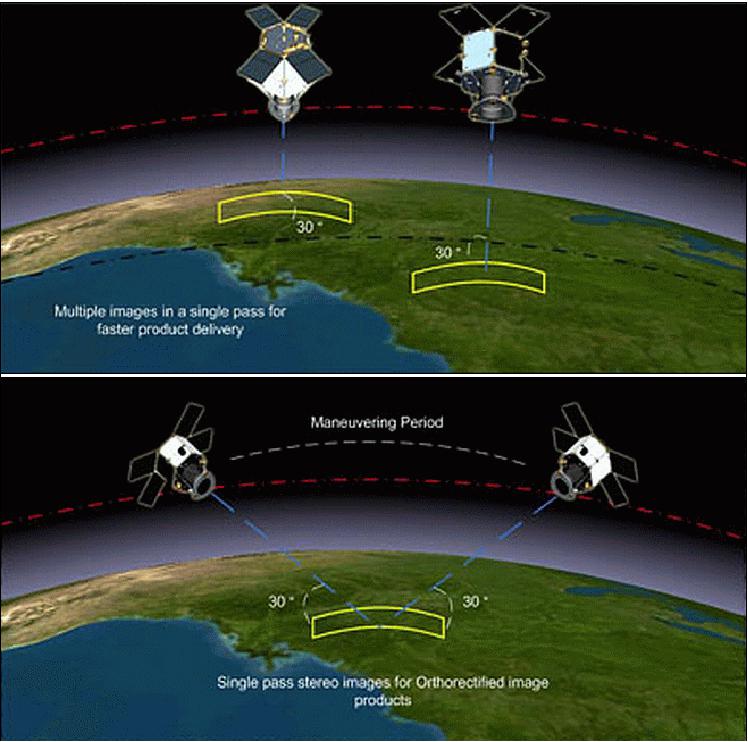
The off-nadir tilting capability of the S/C is intended to improve the revisit time performance and enhance the operational flexibility by significantly reducing the time interval to take images on areas of interest. While the across-track tilt angle for nominal image acquisitions is ±30º, the satellite can be configured to achieve ±45º off-nadir pointing capability, i.e., an extended FOR (Field of Regard) for data collection with short revisit times in emergency situations. Moreover, high-quality observations can be performed close to nadir (small FOR) to enable background mapping.
Spacecraft
A contract between Deimos Imaging Inc. of Valladolid, Spain and SI (Satrec Initiative) of Daejeon, Korea was signed in November 2010. The satellite and its payload are being designed and developed by SI. According to agreements, the spacecraft will be integrated and tested in Spain in collaboration with SI, in the new Elecnor Deimos Satellite Systems premises at Boecillo near Madrid. Deimos Satellite Systems is responsible for system engineering, procurement, testing, integration, launcher procurement, commissioning, in-flight acceptance, and operations of the system.
The project PDR (Preliminary Design Review) was in May 2011. The CDR (Critical Design Review) was completed in June of 2012.
The spacecraft bus is designed to fulfil all mission requirements by incorporating 3-axis stabilized, accurate and agile attitude control for precise imaging operations. The satellite attitude is based on the following main nominal operations modes (Ref. 1):
• Housekeeping sun-pointing mode in sunlight: During the sunlight stage, the spacecraft attitude shall be maintained or steered so that the solar panels are always pointing towards the sun for maximum power generation. When the spacecraft is in sunlight, the camera points in the direction opposite to the sun, unless it is in observation mode.
• Housekeeping nadir-pointing mode in eclipse: The S/C shall point towards the Earth during eclipse to minimize the usage of payload heaters. When the S/C is in eclipse, the camera points in the nadir direction.
• EO modes: The platform agility is exploited to take images not only close to nadir, but also with up to ±45º into any direction (cross-track or ±30º along-track). This allows single-strip imaging of areas of interest, multi-pointing imaging of close-enough targets, single-pass stereo imaging by along-track pitch angle maneuvers and tessellation imaging.
Note: In geometrical terminology a tessellation is the pattern resulting from the arrangement of regular polygons to cover a plane without any interstices (gaps) or overlapping. The patterns are usually repeating.
• Data download operation mode: When the link with a GS (Ground Station) can be set up, the S/C shall maneuver to point to the GS with maximum solar power generation. At the same time, the X-band antenna gimbal shall be steered towards the GS antenna to provide the needed gain. Consecutive image download operations are foreseen if the single-GS pass duration is not sufficient for data download and the following GS visibility interval is very close to the previous one.
• Orbit maintenance and control operation mode: In-plane and out-of-plane orbit maneuvers are enabled by setting firing attitude parameters.
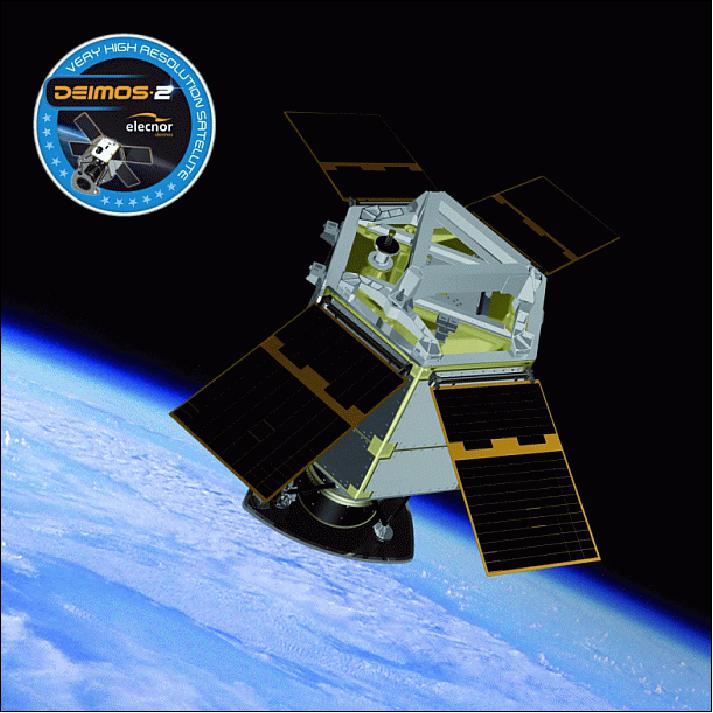
Spacecraft: The Deimos-2 spacecraft is identical to the DubaiSat-1 minisatellite (launched on Nov. 21, 2013) except for a battery capacity to account for a longer life. The nominal mission lifetime shall be 7 years, with a goal of 10 years. 7) 8) 9)
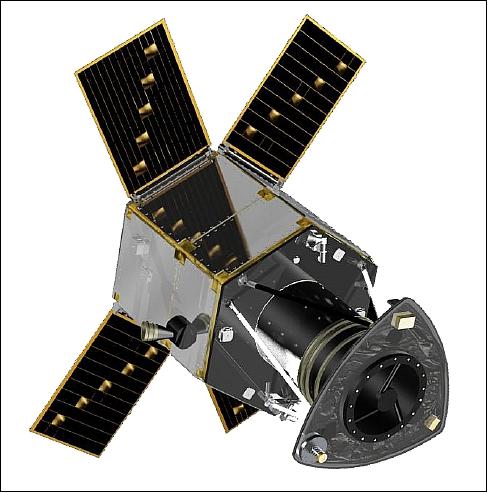
Deimos-2 features the SpaceEye-1 platform of SI (Satrec Initiative), a 300 kg class minisatellite bus (also referred to as SI-300). The SI-300 bus is of DubaiSat-2 heritage. Its architecture is designed to accommodate an Earth observation and/or science payload. The HEPS (Hall Effect Propulsion System) is installed for orbit control and maintenance. Accurate and agile three-axis attitude control supports precise imaging operations. Dual redundancies are adapted where necessary in the system architecture design to increase reliability of the satellite system.
The SI-300 platform, whose size is 1.5 m in diameter and 1.95 m in height, features a deck-and-longeron type structure permitting easy assembly and disassembly. A Li-ion battery and four deployable solar panels are equipped for power supply. The interface with the launch vehicle is made through an adapter bolted to the bottom of the structure.
Parameter | Feature | Comment |
Spacecraft launch mass | ~310 kg | Payload inclusive |
Spacecraft size | Ø 1,500 x 1,940 mm height | Hexagonal shape |
Attitude subsystem | Pointing error: 0.15º (3σ) | 3-axis stabilization |
Agile platform | ±45º pointing in cross-track (max) | High-performance AOCS for pointing accuracy & stability |
OBC (On-Board Computer) | LEON3 FT, with VxWorks OS | Fully redundant, cross-strapped C&DH, 2 CAN busses (500 kbit/s each, redundant) |
Power generation | 450 W @ EOL | 4 GaAs solar panels |
GSD (Ground Sample Distance) | 1 m (PAN), ~ 4 m (MS) | @ 600 km altitude, nadir view |
Swath width | > 12 km |
|
Spectral bands | PAN + 4 MS | PAN + RGB, NIR |
TT&C | S-band (32 kbit/s in up- and downlink) | Telemetry, telecommand & tracking, CCSDS protocol, PTD chip, authenticated commands and encrypted TLM |
Image transmission | X-band with 160 Mbit/s downlink rate | QPSK modulation |
On-board recording capability | 256 Gbit | Equivalent to 1400 km observation strip |
Propulsion subsystem | > 10 mN of thrust, > 1000 s of Isp, 3 kg of Xenon | Orbit control and maintenance |
TCS (Thermal Control Subsystem) | Passive and and thermal control | 5 operational heaters+2 survival heaters; dedicated temperature sensors, uniform distribution |
AOCS (Attitude and Orbit Control Subsystem): The AOCS provides satellite pointing capability for single-strip, multi-strip and single-pass stereo imaging. Five reaction wheels are used for attitude control along with four Fiber Optic Gyros. Attitude data is provided by Star Trackers for fine-pointing and magnetometers and sun sensors for coarse pointing in safe and acquisition mode. Deimos-2 has a pointing accuracy of 0.03º on all axes. A key-feature of the satellite is a high-agility to allow fast body-pointing of up to 45º off nadir, however, during nominal operations off-nadir angles of up to 30º will be used.
Propulsion subsystem: A HEPS (Hall Effect Propulsion System) is used for orbit maintenance and orbit adjustments. It uses electric propulsion utilizing Xenon gas and a microwave cathode. HEPS consists of a XFU (Xenon Fuel Unit), THU (Thruster Head Unit), PPU (Power Processing Unit) and the MCU (Microwave Cathode Unit). The XFU holds about 2 kg of Xenon fuel that is held at a pressure of 150 bar. Via pressure valves and orifices, Xenon is allowed to flow into two smaller tanks, each at 3 bar for the anode and cathode. The thruster head includes magnets for ion motion detection while the PPU provides the different voltages for the HEPS system to accelerate generated Xenon ions to high velocity for ejection. The HEPS provides 7 mN of thrust consuming about 300 W of power.
C&DHS (Command and Data Handling Subsystem): The C&DHS handles all telecommands sent to the satellite and collects all telemetry from the satellite's subsystems. Two CAN networks with data rates of 500 kbit/s are using a series of Interface Boards to connect all satellite modules to the networks. The Interface Boards are in charge of formatting telemetry data and handling messages received from the main computer. The Actuator Interface Board controls the speed of the reaction wheels and provides a speed feedback to the computers.
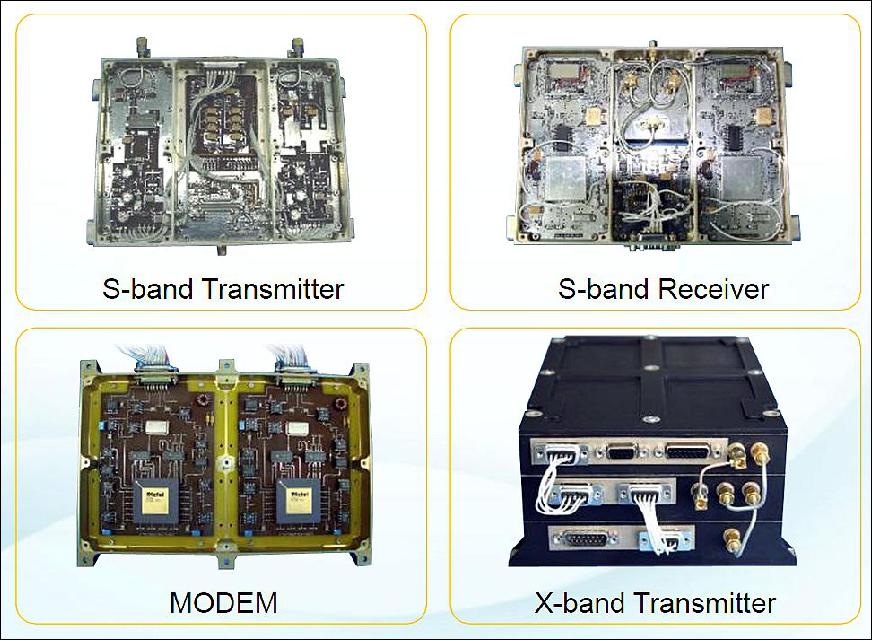
RF communications: The TT&C data are transmitted in S-band. The payload imagery is transmitted in X-band at a data rate of 160 Mbit/s (QPSK modulation). The imagery is stored on a high-capacity solid-state recorder (256 Gbit). The recorder compresses, encrypts and encodes the data in real-time during transmission (lossless compression of image data). CCSDS encoding during transmission. The X-band antenna is steerable in one axis in the range of ±90º. Two telemetry and telecommand boards are operated in hot-redundancy to perform all telecommand decoding and telemetry encoding directly interfacing with the S-Band system that is used for command uplink and telemetry downlink.

Launch
The Deimos-2 minisatellite (310 kg) was launched on June 19, 2014 (19:11:11 UTC) on a Dnepr-1 vehicle of ISC Kosmotras. The launch site was the Yasny Cosmodrome in the Dombarovsky region of Russia. 10) 11) 12) 13)
Another primary payload on the flight is KazEOSat-2, an imaging minisatellite (185 kg) of KGS (Kazakhstan Gharysh Sapary), Astana, Kazakhstan.
The secondary payloads (35) on this Dnepr cluster mission were: 14)
• UNISat-6, a microsatellite of GAUSS at the University of Rome (La Sapienza), Italy. UniSat-6 (26 kg) includes Pico-Orbital Deployers and PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployment) systems for the release of four CubeSats from the spacecraft. These four satellites are:
- Lemur-1, a 3U CubeSat (technology demonstration and EO) of NanoSatisfi Inc., San Francisco, CA, USA
- TigriSat, a 3U CubeSat of the University of Rome (La Sapienza), Rome, Italy.
- ANTELSAT, a 2U CubeSat of UdelaR (University of the Republic), San Marino, Uruguay
- AeroCube-6, a 1U CubeSat of The Aerospace Corporation, El Segundo, CA.
• SaudiSat-4 a microsatellite (112 kg) of KACST (King Abdulaziz City for Science and Technology) with input from NASA/ARC.
• AprizeSat-9 and -10, nanosatellites (each of 12 kg) of SpaceQuest, USA. AprizeSat-10 carries an AIS (Automatic Identification System) receiver for ship tracking.
• Hodoyoshi-3 and -4, microsatellites (60 kg and 65 kg) of the University of Tokyo and of JAXA/ISAS, Japan
• BRITE-CA-1 and BRITE-CA-2, two nanosatellites (7 kg each) of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies), Toronto, Canada
• TabletSat-Aurora, a microsatellite (25 kg) of SPUTNIX, Russia
• BugSat-1, a microsatellite (22 kg) of Satellogic S.A., Argentina
• Perseus-M1 and M2, two identical 6U CubeSats of Canopus Systems US / Dauria Aerospace. The nanosatellites are carrying an AIS payload for ship tracking.
• QB50P1 and QB50P2, two 2U CubeSats (2 kg each) of Von Karman Institute, Brussels, Belgium. These are two precursor satellites to the QB50 project that will launch a network of 50 satellites by a team of 15 universities and institutions around the world.
• NanoSatC-Br1, a 1U CubeSat of the Southern Regional Space Research Center and of INPE, Brazil
• DTUSat-2, a 1U CubeSat of DTU (Technical University of Denmark), Lyngby, Denmark
• POPSat-HIP-1, a 3U CubeSat of Microspace Rapid Pte Ltd., Singapore
• PolyITAN-1 of KPI (Kiev Polytechnic Institute), Kiev, Ukraine
• PACE (Platform for Attitude Control Experiments), a 2U CubeSat (2 kg) of NCKU (National Cheng Kung University), Tainan City, Taiwan
• Duchifat-1, a 1U CubeSat of HSC (Herzliya Science Center), Israel
• 11 Flock-1c nanosatellites (eleven 3U CubeSats, 5 kg each) of Planet Labs, San Francisco, CA.
Orbit: Sun-synchronous near-circular orbit, nominal altitude of 630 km, inclination of 98º, nominal LTAN (Local Time of Ascending Node) at 10:30 hours. Ultimately, a 4-day revisit time performance of Deimos-2 is enabled by the ±45º maximum off-nadir pointing capability.
Mission Status
• March 25, 2025: ESA’s Earthnet Third Party Missions Programme added the GEOSAT-2 Spain Coverage 2022 dataset to its collection in early 2024, providing updated high-resolution imagery of Spain, including the Balearic and Canary Islands. This dataset, which follows the GEOSAT-2 Spain Coverage 2021 release, features imagery with less than 10% cloud cover and a geolocation accuracy of <4 m RMSE. Users can access two product types: pan-sharpened images at 1m resolution and bundle products combining panchromatic (1m) and multispectral (4m) bands. 50)
• May 16, 2018: UrtheCast Corp. and its subsidiary, the Earth Observation company Deimos Imaging SLU ("Deimos Imaging"), will be supplying Earth Observation products and services from the Deimos-2 satellite, during an initial period of three years that could be extended up to five years per a contract with the Brazilian Ministry of Defence's Aeronautics Command (COMAER) that exceeds $2.6 million U.S. dollars. 15)
- Jamie Ritchie, Chief Commercial Officer at Deimos Imaging stated that they are very excited and proud to deliver their best-in-class services to the Brazilian Ministry of Defence for the first time. The award of this contract reinforces their increasing role as key provider of imagery and geoinformation products worldwide.
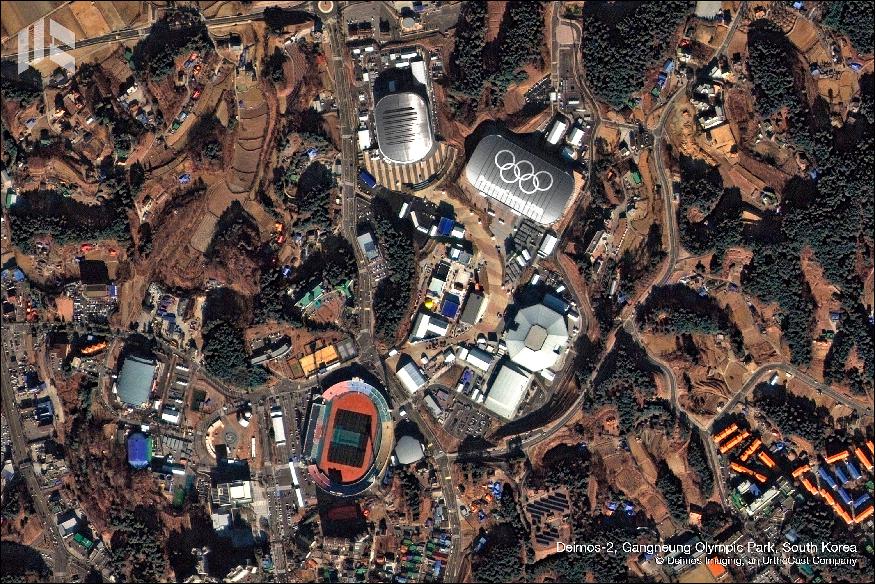
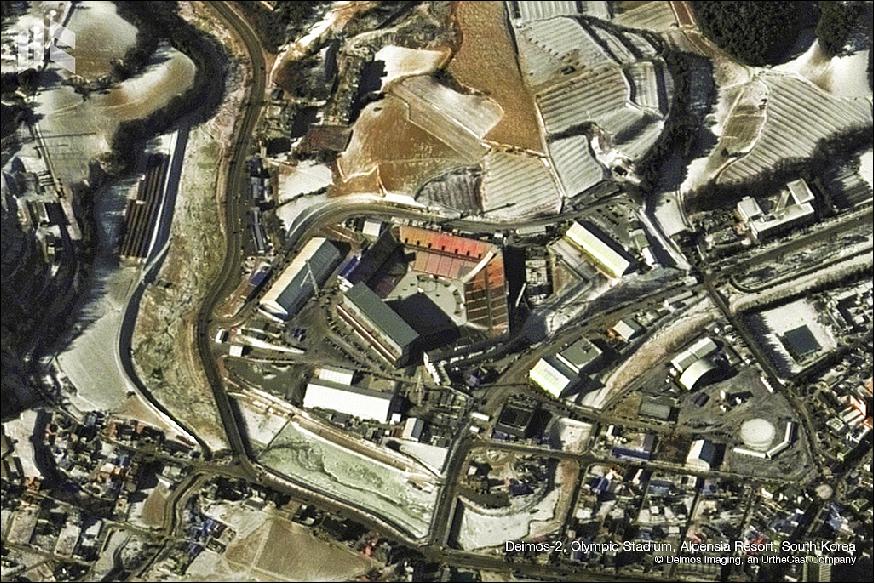
• February 2018: The Deimos-2 satellite of Deimos Imaging captured the sites of the Winter Olympics in PyeongChang, South Korea. 16)
• December 21, 2017: UrtheCast Corp. and its subsidiary Deimos Imaging have signed an agreement with Korea's SI Imaging Services (SIIS) for the mutual global distribution of their satellite imagery portfolios. This collaboration integrates Deimos-1, Deimos-2, and the KOMPSAT series (KOMPSAT-2, -3, -3A, and -5), offering a combination of X-band SAR and high-resolution optical data ranging from 22 m to 0.4 m per pixel. The partnership aims to enhance Earth observation capabilities, enabling continuous monitoring and real-time response for applications such as emergency services, border surveillance, and defense. Both companies expect this agreement to strengthen their market presence, improve decision-making for customers, and expand geospatial data distribution. 17) 18)
• August 5, 2016: The Deimos-2 satellite of UrtheCast acquired Figures 8 and 9 of Rio de Janeiro, Brazil. 19)


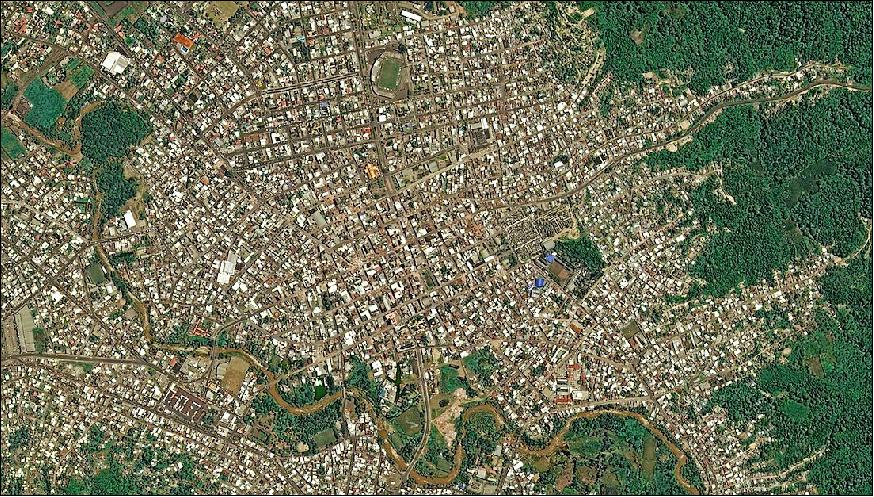
• May 12, 2016: One month after the 7.8-magnitude earthquake struck Ecuador on April 16, 2016, causing widespread devastation, the UN reported a death toll of 660, with 23 people still missing. The hardest-hit areas included Muisne, Pedernales, and Jama. Satellite imagery from UrtheCast’s Deimos-2, Pleiades, and WorldView-2 was utilized by the UNOSAT program to assess damage in Portoviejo City, identifying 437 potentially damaged structures, including 87 destroyed and 83 severely damaged buildings. 20)
• July 15, 2015: UrtheCast Corporation has acquired the Earth Observation business Deimos Imaging from Elecnor, S.A. for €76.4 million, gaining ownership of the Deimos-1 and Deimos-2 satellites along with their operations related to imagery collection, processing, and distribution. This acquisition is expected to enhance UrtheCast’s strategies for distribution, web platform development, and the expansion of its planned 16-satellite constellation, which will include both optical and SAR instruments. As part of the deal, UrtheCast entered a Mutual Cooperation Agreement with Elecnor Deimos, making them a strategic partner in the constellation's implementation. Other partners include Canadian companies contributing to the SAR payload and SSTL (UK) for spacecraft platforms and optical payloads. Deimos Imaging, now a subsidiary of UrtheCast, continues to manage and commercialize the Deimos-1 and Deimos-2 missions. 21) 22)
• June 19, 2015: Deimos-2 celebrated one year on orbit. The satellite, which is owned by Elecnor and operated by its technological division Elecnor Deimos, has traveled around the Earth approximately 5,300 times during this year. DEIMOS-2 is the first Spanish very-high resolution Earth Observation satellite, producing multispectral images with a resolution of 75 cm per pixel. It is the highest-resolution fully private satellite in Europe and one of the very few privately-owned submetric satellites in the world. 23)
• May 27, 2015: Deimos Space UK and the MBRSC (Mohammed Bin Rashid Space Center), formerly EIAST, in the UAE (United Arab Emirates) have signed a one-year contract to develop mapping applications that use DubaiSat-2 and Deimos-2 high-resolution satellite data. Typical applications include products and services for agriculture, forestry, disaster monitoring, land use, surveillance and intelligence. 24)
• April 1, 2015: Deimos-2 joined the fleet of Copernicus Contributing Missions in the new Data Warehouse phase of the Copernicus Space Component Data Access (CSCDA), coordinated by ESA (European Space Agency). This initiative is headed by the EC (European Commission) in partnership with ESA. The program is designed to provide accurate, timely and easily accessible information, improve the management of the environment, understand and mitigate the effects of climate change, ensure civil security and support effective policy-making for a more sustainable future. Copernicus offers a unified system through which vast amounts of data are supplied into a range of thematic information services. These services fall into six main categories: land management, marine environment, atmosphere, emergency response, security and climate change. 25)
• March 23, 2015: The Deimos-2 satellite captured the Expo 'Milan Universal Exhibition', which takes place during a six-month period from May through October. This year, entries from 140 participating countries focused on "Feeding the Planet," with a goal to "guarantee healthy, safe and efficient food for everyone". 26)

• March 13, 2015: ESA released an image of São Miguel, Azores observed by the Deimos-2 satellite, as shown in Figure 12. The circular crater ("caldera") dominating the image measures approximately 5 km across. The interior has lakes, volcanic cones, lava domes and shallow, flooded craters ("maars").27)

• January 2015: Deimos-2 is now providing a FOC (Full Operational Capability) commercial service to customers worldwide. 28)
• November 2014: Elecnor-Deimos declared IOC (Initial Operational Capability) for Deimos-2 and started commercial operations. 29)
• October 2014: EIAST (Emirates Institution for Advanced Science and Technology) and Elecnor Deimos have formed a Public-Private Partnership (PPP) to jointly operate and commercialize imagery from the DubaiSat-2 and Deimos-2 satellites, integrating them into a coordinated constellation. Supported by four ground stations across Dubai, Spain, Sweden, and Canada, the partnership ensures efficient satellite contact and standardized products. This initiative led to the creation of the PanGeo Alliance, the first global coalition of Earth Observation satellite operators, which includes entities from the UAE, Spain, the USA/Russia, and China. The current PanGeo fleet consists of nine satellites and is expected to expand to over 30 in the coming years with the addition of new satellites such as KhalifaSat and the Perseus-O and Auriga constellations. The alliance offers multispectral imagery at resolutions ranging from 20 meters to 75 cm per pixel, along with AIS data for maritime monitoring, providing global daily imaging capabilities to all member organizations. 30) 31) 32) 33)

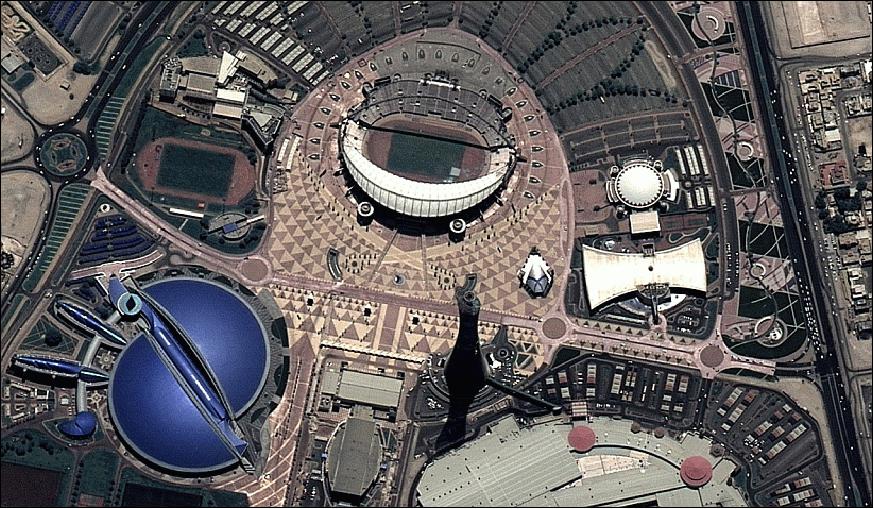
• June 26, 2014: Following its successful launch, Deimos-2 began capturing and transmitting high-resolution images within 12 hours of reaching orbit. The first images focused on Doha, Qatar, showcasing detailed views of infrastructure developments for the 2022 Soccer World Cup. Over its first five days, Deimos-2 established 60 contacts with ground stations in Puertollano, Kiruna, and Inuvik, successfully transmitting data and activating all onboard subsystems. Now in its commissioning phase, the satellite will undergo calibration before beginning its operational mission, providing 0.75 m resolution imagery in five spectral bands for applications in environmental monitoring, civil protection, defense, and border control over its expected seven-year lifespan. 34) 35) 36)

Sensor Complement
HiRAIS (High Resolution Advanced Imaging System)
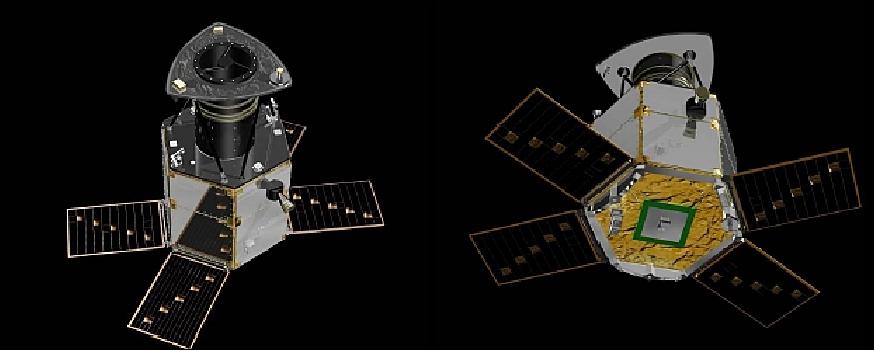
HiRAIS is an optical payload, designed and developed by SI (Satrec Initiative) of Daejeon, Korea in collaboration with Elecnor Deimos. The proven design has a significant heritage with DubaiSat-1 and -2 of EIAST (Emirates Institution for Advanced Science and Technology), United Arab Emirates. Dubaisat-2 is an almost exact Deimos-2 twin. The HiRAIS instrument consists of three elements:
• EOS (Electro-Optical Subsystem)
• SSRU (Solid-State Recorder Unit)
• ITU (Image Transmission Unit).
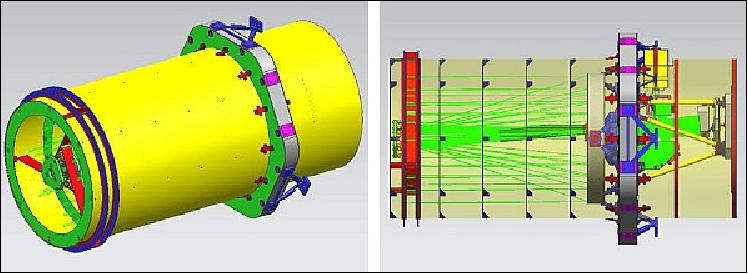
EOS is comprised of the following elements: telescope, ACM (Auxiliary Camera Module), and FPA (Focal Plane Assembly). EOS is a pushbroom type camera with 1 m GSD (Ground Sampling Distance) for a panchromatic imagery and 4 m GSD in four MS (Multispectral) bands (red, green, blue and NIR). The swath width of the generated image is 12 km.

EOS features a Korsch telescope with 5 mirrors. The optical design includes the main mirror (M1) of 415 mm diameter, 3 mirrors to increase the focal length up to 5.7 m, and a flat mirror to reflect light rays onto FPA. Light-weighted Zerodur is used for the mirrors, while CFRP material was used to design the main optomechanical structure of HiRAIS. The temperature balance of the mirror surfaces, the distances between the mirrors and the FPA are all actively controlled by a feedback heating system, which includes thermostats and heaters. Also passive cooling with heat dissipative materials.
Camera | Pushbroom type imager |
Optics | - Korsch telescope of 42 cm aperture diameter (clear aperture of 40 cm diameter) |
GSD (Ground Sample Distance) | 0.75 m PAN-sharpened, 4 m MS @ 590 km altitude |
Spectral bands | Pan: 450-900 nm |
FPA (Focal Plane Assembly) | CCD detector with TDI capability |
TDI detector exposure levels of the various bands | PAN: 6, 12, 24, 48 |
Data quantization | 10 bit |
Swath width | 12 km at nadir (24 km in wide area mode) |
Data handling | Lossless compression, real-time encryption |
Downlink data rate | 160 Mbit/s (QPSK) |
HiRAIS instrument mass, power | 50 kg, ~100 W |
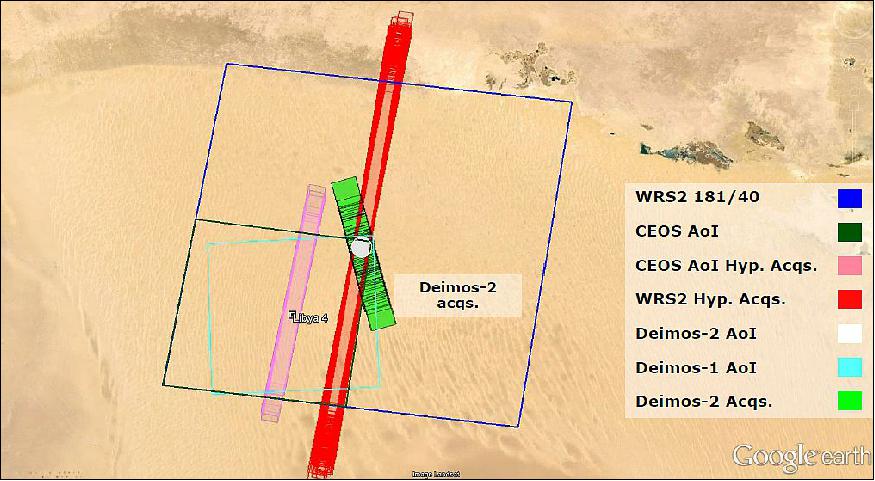
HiRAIS Instrument Calibration
The imager underwent extensive pre-launch calibration activities (Ref. 5) involving geometric, spectral, and radiometric calibrations to characterize the sensor.
The on-board radiometric calibration techniques follow closely the CEOS CAL/VAL recommendations and sites:
• PRNU (Photo Response Non-Uniformity) measurements using uniform and high reflectivity LNES (Land Non Equipped Sites)
• Dome-C around winter solstice
• Greenland around summer solstice
• Dark signal measurements using night images over the north pacific, where light sources (natural or anthropogenic) are unlikely.
MTF measurement:
• The MTF estimation will be performed using the slanted edge methodology. Same as Deimos-1 but using artificial targets instead of field transitions
• The basis of this methodology is to oversample the edge taking advantage of its tilt along the track, assuming that it is straight
• Source data will be raw data after DS and PRNU correction, which is simply applying a linear function to each column to remove stripping. No convolution or resampling will be applied
• Viewing geometry and line rate will be taken into account.
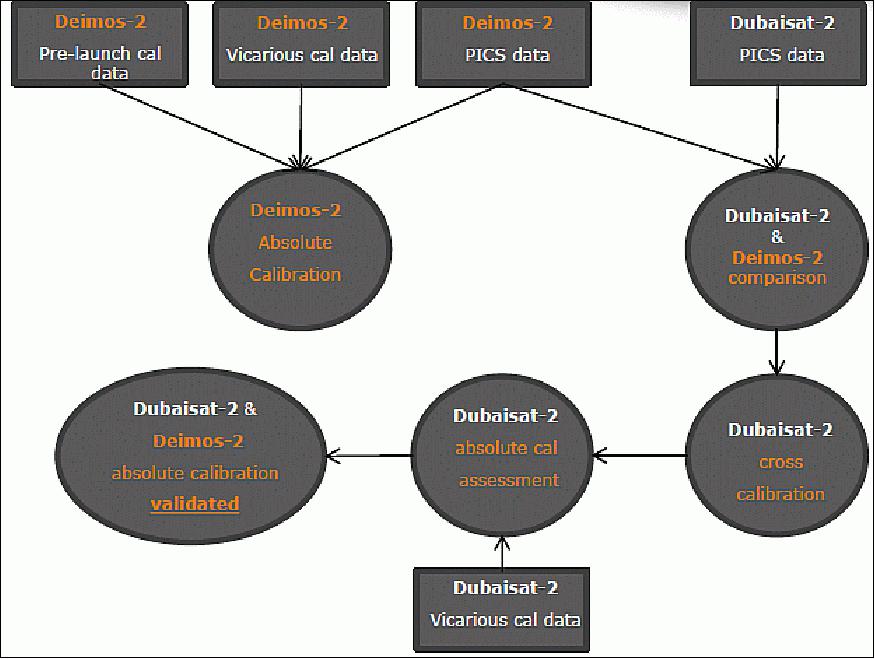
Deimos-2 radiometric characterization and cross-calibration with Dubaisat-2: 37)
Workflow of cross-calibration with DubaiSat-2:
• Deimos-2 absolutely calibrated data will be used as reference
• Data acquired on LNES (Land Non Equipped Sites) for sensor trending will be used to cross-compare with Dubaisat-2
• Cross calibration coefficients will be generated for Dubaisat-2 based on the data comparison
• Vicarious validation campaign for the absolute calibrated Dubaisat-2
• If the validation campaign is successful, both sensors will be considered absolutely calibrated and validated
Deimos-2 post-launch radiometric characterization and calibration: 38)
Sensor characterization:
• DSNU (Dark Signal Non-Uniformity)
- Using acquisitions during eclipse over the North Pacific, where light sources (natural or anthropogenic) are unlikely
• PRNU (Photo Response Non-Uniformity)
- Greenland (Launched on June the 19th 2014. Dome-C unavailable at that time)
- Dome-C (Antarctica)
• MTF (Modulation Transfer Function)
- Stennis Space Flight Center (USA)
- Salon de Provence (France)
- Baotou (China).

Quality indicator | Calibration results |
Radiometric correction | OK |
Absolute calibration uncertainty | < 5.4% MS, ~7.4% PAN |
SNR (Signal-to-Noise Ratio) | ~112:1 PAN, > 90:1 MS |
MTF (Modulation Transfer Function) | ~9.1% PAN, > 31% MS @Nyquist |
The uncertainty is expected to improve as more data becomes available.
The absolute calibration procedure results are considered acceptable, but not validated until a vicarious calibration campaign is performed.
Ground Segment
The ground segment has been completely developed in-house by Elecnor Deimos Space, in Madrid. Deimos Imaging (DMI), a company of the Elecnor Deimos Group, will be operating the Deimos-2 mission from its premises in Spain. The link between the space and ground segments will be performed thanks to the main GS (Ground Station) Puertollano (Spain) for both telemetry and telecommand and payload data (10 m antenna dish), and optionally to the GS of Svalbard (Norway) for payload data download only. 40) 41) 42)
Deimos ground segments are based on the gs4EO (Ground Segment for Earth Observation) suite of state-of-the-art products. These products are the result of the know-how gathered for more than a decade of work for ESA (European Space Agency), customized to small Earth Observation missions. gs4EO flight operations software has been designed according to the following main drivers: 43) 44)
• Operations automation, enabling the complete handling of all the S/C operations with the minimum number of operators and maintenance costs. Nominal operations are automated with no need of operator intervention leading to minimization of operation costs
• Heavy use of virtualization technologies to simplify ground segment deployment and maintenance and to minimize ground segment deployment and maintenance costs
• Secure access to flight operations functions from remote sites, ensuring no unauthorized access to spacecraft telemetry and commanding functions (encryption and command authentication) occurs. Exploitation of wide spread secured web technologies will allow distributed flight operations
• Quick response to emergency operations, allowing reprogramming the satellite operations in a very short time, even changing the on-board operations within the same orbit (e.g. to schedule an emergency acquisition and to download it in the same orbit).
• Deployment flexibility, allowing installing the ground systems in different locations and using different sets of ground stations, both for spacecraft monitoring and control and payload data reception. It allows to install independent spacecraft control or payload data processing systems or even individual facilities (e.g. mission planning).
• Expandability: gs4EO is a modular system allowing an easy adaptation of its capabilities to future needs (e.g. collaboration with other satellite service providers).
• Based on open platforms that minimize licensing costs and facilitate interoperability and maintainability.
• Maximize interoperability, aligning with international standards whenever possible.

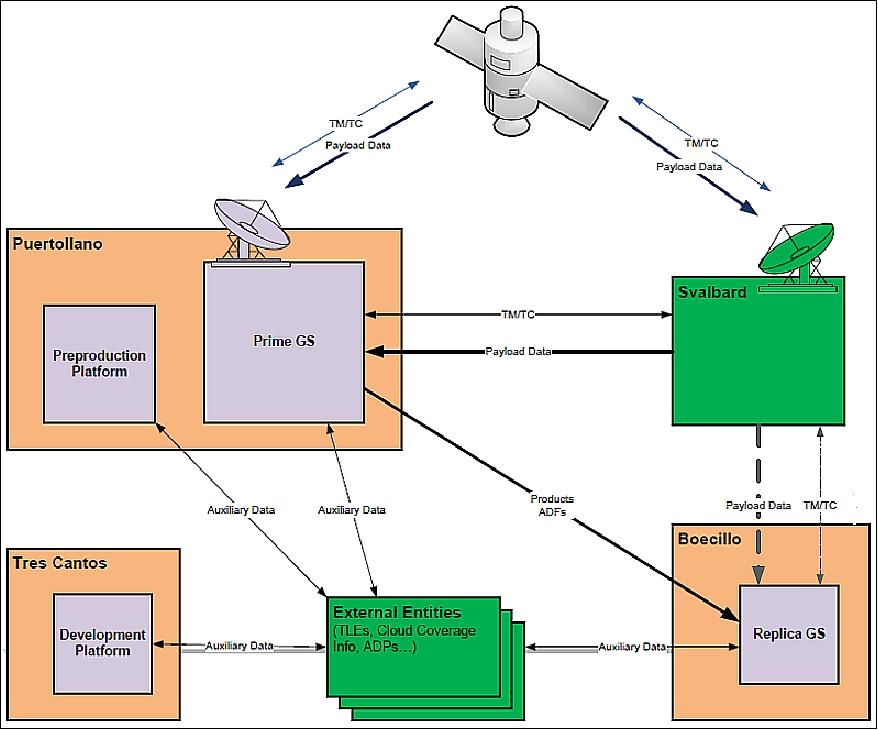
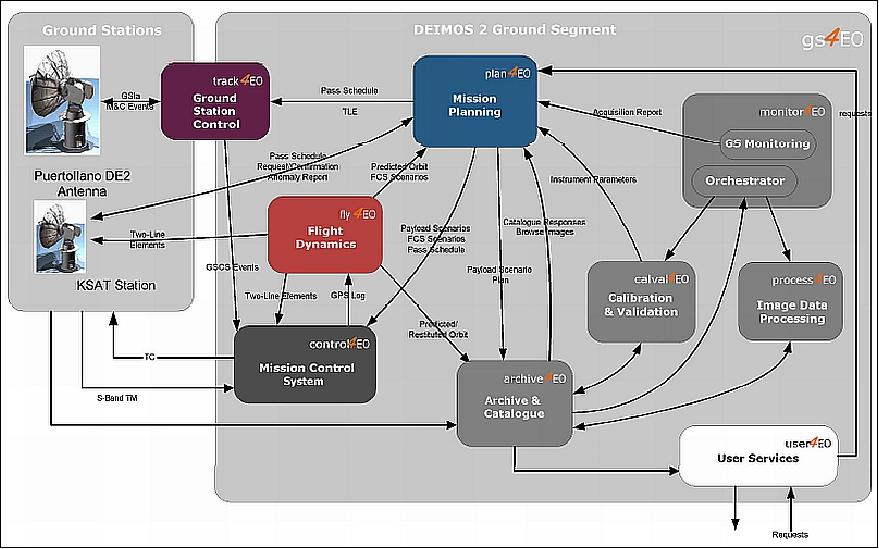
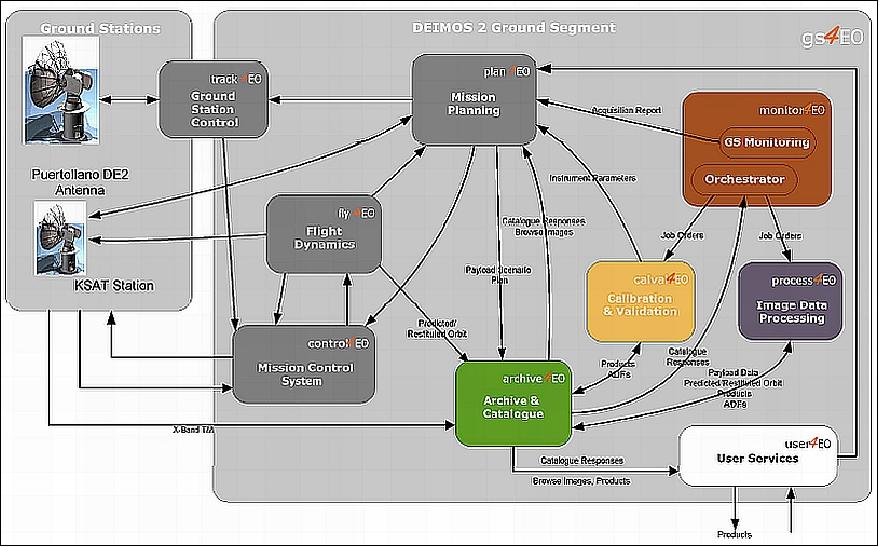
Ground segment architecture: Deimos-2 is the first mission where the complete suite of gs4EO products is being used. The Deimos-2 ground segment includes the complete on-ground facilities to control, monitor and commercially exploit the mission. Figure 26 shows the D2 GS high level architecture decomposition, a simplified view of the relations between the different ground segment elements, as well as the specific initial Ground Station setup for the Deimos-2 mission, with one main station in Puertollano, Spain, and a polar station (Svalbard). It is to be noted that nearly all the GS infrastructure is running in a virtualized HW environment. Archive & catalog, as well as data processing servers are easily scalable in this framework.
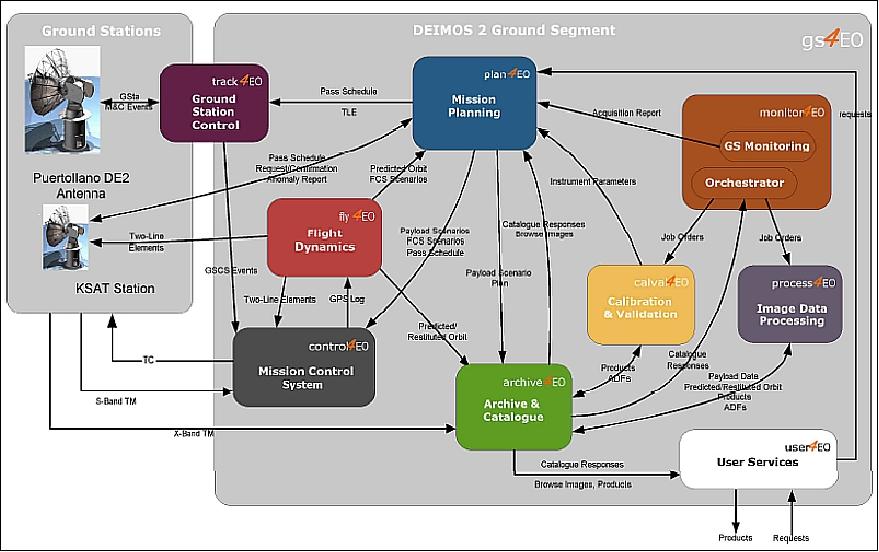
Function | Description |
user4EO user services | Tool for user image acquisition request assessment with or without automatic connection to central plan4EO, together with advanced front-end for archive and catalogue query, visualization and dissemination |
plan4EO mission planning | Mission plan generation for imagery acquisition and related data downlink activities to ground stations; as well as platform operations planning |
fly4EO flight dynamics | Provides full orbit monitoring and maintenance capabilities, including the monitoring of space debris that would allow S/C operators to implement any required collision avoidance maneuver scenario(s) to be uplinked and then executed by the on-board SW |
control4EO mission control system | Performs the monitoring and control of the satellite platform and payload, including real-time and back orbit HK (Housekeeping) TM reception, processing and visualization, telecommanding and onboard SW management |
track4EO ground station control | Configuration of the ground station equipment and monitoring its operation during satellite passes |
archive4EO archive & catalog | Hierarchical storage solution and meta data catalog storing archived files meta data. Catalog Web services (CSW) are used to allow access via HTTP interfaces through Description, Discovery & Publication ops. |
process4EO image processing chain | Processing the payload raw data from the satellite to produce image products (radiometric and geometric corrections, up to fully ortho-rectified images) |
monitor4EO monitoring & control | Data circulation, Ground Segment health monitoring and management of the complete automatic processing chain execution (orchestration) |
calval4EO calibration & validation | Facility for updating and validating on-ground configuration parameters to ensure the image data quality requirements. |
Two main chain are identified in the ground segment:
1) the flight operations chain, and
2) the data processing chain.
In both chains the user services element is involved, either as initiator or as final destination of the chain.
Flight operations chain: The gs4EO FOS (Flight Operations Segment) addresses one of the main challenges for small commercial missions, the reduction of operations costs. One of the main costs drivers for commercial missions that required uninterrupted exploitation of the S/C payload, is the amount of operators required in the control center during working and non working hours to perform operations tasks or even to supervise that ongoing operations are performed according to plan. This is critical to prevent any unforeseen stop on the mission data return.
For this reason it is important for small commercial missions to reduce to a minimum the amount of man power required to operate the S/C but ensuring the maximum mission return. The gs4EO FOS addresses this critical aspect by two key features:
• Automation of nominal operations
• Grant secured access to Control Center functions from remote sites.
The GS4EO FOS provides the auto4EO component, a powerful automation infrastructure that allows all nominal satellite operations to be performed without operator intervention.
All gs4EO FOS components export their functions via programmatic APIs (Application Programming Interfaces). Those APIs can be called from scripts to access those functions, in a similar way that the operator works via the component HMIs (Human Machine Interfaces). Using the various APIs , scripts can be implemented to automate all required tasks related to satellite operations.
Scripts could, in principle, be implemented in any available scripting language, though for the gs4EO, support is provided only for a number of them that are of common use by the computing community such Python, Ruby and Javascript. Satellite operations related activities (as scripts) can be scheduled for execution by an operator, or even by other gs4EO FOS component within the auto4EO infrastructure as required. Scheduled scripts can then be triggered by time or even by the occurrence of predetermined operational events (e.g. AOS, LOS, etc). This makes the gs4EO FOS automation environment very dynamic, where the system can react to whatever occurs as result of the operations activity execution.
Data processing chain: The data processing function has been designed to operate automatically and in near-real time. Several levels of processing have been defined, from the stream of raw data produced by the instrument up to fully annotated, ortho-geolocated images of standard size. Two independent processing chains are defined:
• The radiometric processing chain, which translates the instrument counts to scientific units (radiances). This chain relies on specific auxiliary information provided by the instrument, and on a calibration and characterization data base that must be updated regularly during the mission lifetime.
• The geometric processing chain, which registers the different bands, geolocates every pixel and resamples the images to a variety of standard cartographic projections.
Other product derivatives, such as pan-sharpened images, three-dimensional scenes, and domain-specific products, are also supported as higher level processing levels. Multi-temporal analysis tools and methods, especially in the field of environmental monitoring, are a strong asset at Deimos.
Although the processing chain integrates well-known transformations that are generally applicable to most optical missions, the specificities of the Deimos-2 mission have been taken into account when selecting between alternative algorithms. In addition, the modular design has made it possible that for some of the processing steps, more than one alternative module is provided. For example, the geolocation and ortho-rectification can be accomplished by using either a physical sensor model, or a RFM (Rational Function Model). Performance considerations will be used to select the best configuration during the commissioning phase of the mission.
Notwithstanding the system's capability to automatically ortho-rectify the product images, Deimos' ground segment also supports human-driven ortho-rectification. In this approach, a human operator manually identifies ground control points in both the acquired image and a reference image, using tools specifically designed for this purpose. In the context of the Deimos-1 mission, this approach has shown to be more reliable and to achieve better accuracy than the fully automatic chain.
The data processing chain incorporates different standards such as:
• Catalog Web services following OGC (Open Geospatial Consortium) standards
• EO GML meta data for products
• OGC WPS for cluster distributed processing
• ESA's Generic Interface for Instrument Data Processing (via job orders).
CAMP (Capacity Analysis and Mission Planning)
CAMP is an automated operational mission planning tool optimized for agile satellites; it provides both enhanced long-term mission return analyses and a sound prototype for a fully-automated mission planning chain, working on short-term operational horizons. 45)
The CAMP tool is constructed around two main modules (Figure 29). On top of the inputs shown on the diagram (orange blocks), both modules share a wide set of inputs describing the orbit, the ground segment and the 3 modelled platform resources: AOCS, power and data handling.
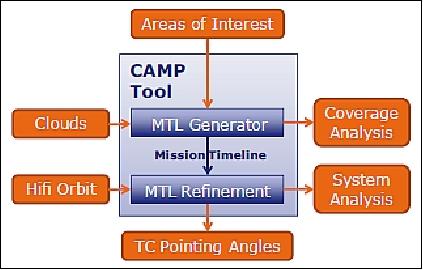
The first module generates feasible MTLs (Mission Timelines, sequence of operations). From a set of AoI (Areas of Interest), it analyses the orbital geometry to find observation opportunities and builds full MTLs that respect the constraints imposed by the system resources (modelled with some approximations). It is also able to repeat the scheduling exercise and select the best-performing MTL from the point of view of mission return (taking also cloud forecast into account). Finally, it provides results and plots about the coverage performance of the selected MTL over the simulation time.
The second module simulates the execution of the selected MTL by the spacecraft, thanks to a high-fidelity system simulator. It combines the MTL and the high-fidelity orbit propagation (based on operational orbit determination) to derive the pointing angles to be uploaded to the satellite. It then uses state-of-the-art models to simulate the AOCS, the power management and the data flow. It produces a thorough reporting of the satellite system state at any moment and detects any possible resource conflict. An MTL coming from the MTL generator has no reason to create any conflict under nominal conditions, as it uses fair models of the on board resources plus security margins. But unexpected changes in the MTL (operator manual edit for contingency reasons) or in the orbit (emergency maneuvers) might overload the system. This final crosscheck is critical for the security of the system.
Automated mission timeline generation: The tool receives as input the users' requests, represented by AoIs (Areas of Interest), and transforms them into targets. Through a geometric analysis, involving the propagated satellite orbit, the targets' position and some user defined constraints (including cloud coverage forecast) all the possible observation events are selected. They are ordered by priority and then passed to a scheduler that, thanks to approximate models of the satellite resources, generates a mission timeline satisfying the platform constraints. The MTL performance is evaluated by means of a FoM (Figure of Merit) and the ordering and scheduling process can be repeated in order to maximize the mission return. The architecture of the automated mission timeline generator is shown in Figure 30.
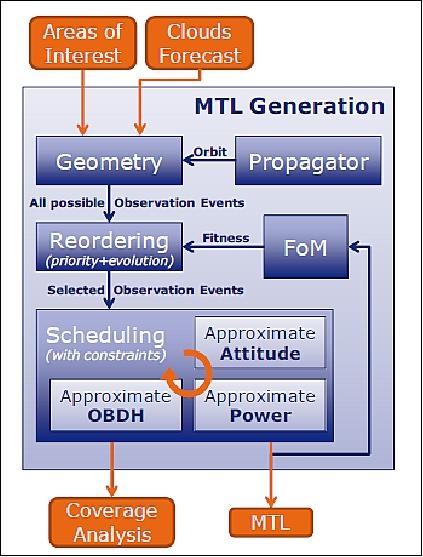
Overall, the CAMP tool is able to automatically translate a set of customer areas of interest, with complex characterization and constraints, into a detailed sequence of operations. This MTL (Mission Timeline) includes all system events: station keeping, various modes of Earth observation, data downlink and orbit maintenance, plus all the satellite slews and tranquillization intervals between them. It is always compliant with on-board resources: agility, power and memory. Finally, it is chosen as the best-performing MTL amongst a set of peers generated during a process of optimization that can be driven by various algorithms.
ENTICE (dEcentralized repositories for traNsparent and efficienT vIrtual maChine opErations)
Processing and distribution of big space data still presents a critical challenge: the treatment of massive and large-sized data obtained from Earth Observation satellite recordings. Remote sensing industries implement on-site conventional infrastructures to acquire, store, process and distribute the geo-information generated. However these solutions do not cover sudden changes in the demand of services and the access to the information presents large latencies. Cloud infrastructures are envisaged as a possible solution to improve EO systems dealing with large datasets, however the current technology still presents some limitations: 46) 47)
• the VMIs (Virtual Machine Images) are not optimized being highly over-sized which impacts in the costs of using the infrastructure and in the dynamic resources provisioning
• the deployment of Virtual Machines (VM) in cloud has large duration, normally between 10 and 20 minutes which directly affects to the flexibility and dynamic scalability of the system.
Deimos' research focuses in the development of Future Internet technologies in order to improve EO (Earth Observation) services and to highly reduce the costs associated with on premises deployment. Within the ENTICE H2020 project, Deimos intends to implement a flexible, cost-effective PDGS (Payload Data Ground Segment) in a cloud computing infrastructure by reducing 60% the VMI size, 30% VMI delivery time, 25% deployment time, 25% VM cost and 25% VM storage.
Note: The ENTICE project has received funding from the European Union's Horizon 2020 research and innovation program under grant agreement No 644179 (Ref. 48).
ENTICE Technology
ENTICE has brought together a collection of three commercial use cases in the realms of energy management, cloud orchestration and big data. Companies dealing with Earth observation data, Cloud service providers and multi Cloud ecosystems will be able to optimize VM (Virtual Machine) images to effectively use Cloud resources and virtualized environments for their computing and data processing needs, trying to overcome the issues they had before:
• Manual, error-prone and time consuming VM image creation
• Monolithic VM images with large deployment and migration overheads
• Proprietary un-optimized VM repositories
• Inelastic resource provisioning
• Lack of information to support effective VM image optimization.
In the Earth observation industry, processing and distribution of big space data still presents a critical challenge: the treatment of massive and large-sized data obtained from EO satellite recordings. Remote sensing industries implement conventional on-site infrastructures to acquire, store, process and distribute the generated geo-information. However these solutions do not cover sudden changes in the demand of services and the access to the information presents large latencies.
Elecnor Deimos will improve the following Earth Observation services and highly reduce the costs associated with on premises deployments:
• Acquisition of raw data: when the imagery data is ingested from the satellite into the ground station, the system is notified and the ingestion component automatically ingests the raw data into the cloud for processing.
• Processing of the raw data: once the data is ingested, it is processed in the product processors. There are several processing levels.
• Archiving and cataloguing geo-images: the different products obtained from the processing of raw data are archived and catalogued in order to provide these images to end users or to provide high-added value services.
• Offering user services: this is the front-end of the system. It allows end users to select which product they want to visualize or to download.
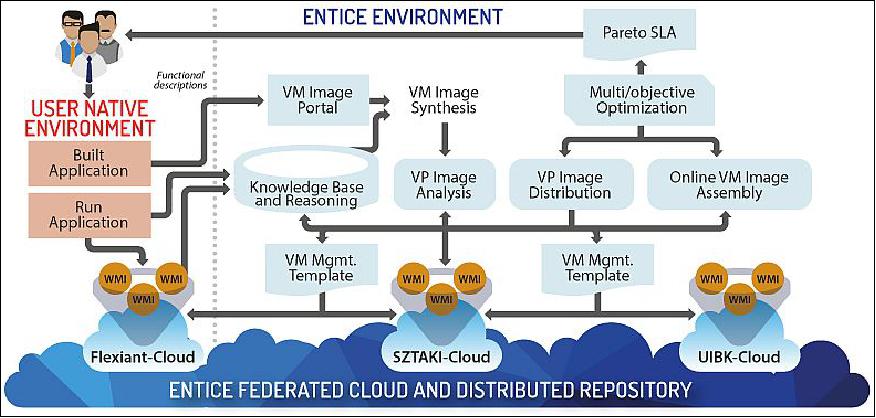
Virtualization is a key technology in Cloud computing that allows users to run multiple virtual machines (VM) with their own application environment on top of physical hardware. Virtualization enables scaling up and down of applications by elastic on-demand provisioning of VMs in response to their variable load to achieve increased utilization efficiency at a lower operational cost, while guaranteeing the desired level of Quality of Service (QoS, such as response time) to the end-users. Typically, VNS are created using provider specific templates (so-called VM images) that are stored in proprietary repositories, leading to provider lock-in and hampering portability or simultaneous usage of multiple federated Clouds. Figure 31 depicts the high level architecture of the ENTICE environment. 48)
GS4EO (Ground Segment for Earth Observation) cloud-based implementation with ENTICE
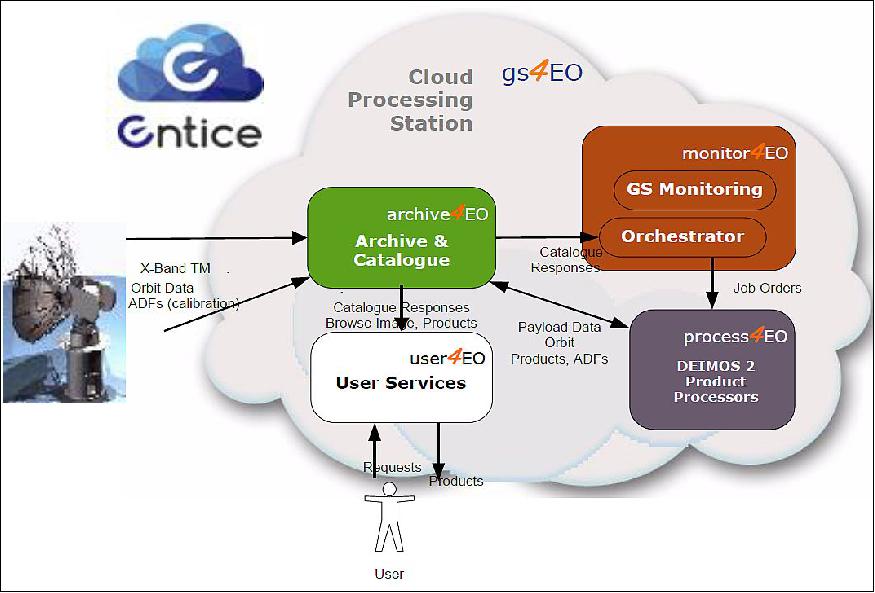
The GS4EO distributed architecture computed in cloud makes use of the ENTICE environment for its virtualization. The system is constituted by a GS Monitor which continuously pools over the different ground stations subscribed to the system, a Product Processors module which processes the row data obtained from the satellite, an Archive and Catalogue module which stores and classifies the processed images and a module providing User Services. Figure 32 shows a scheme of the implementation concept with ENTICE.
One added effect of applying the ENTICE technology on a system is obtaining a process for automatic generation of micro-services. 49) The nature of the ENTICE optimization phase allows a "top-down" approach on system engineering, i.e., by gradually removing all non-essential features not included in a functional description. If the functional description includes only one task, this optimization would generate a single task-focused microservice without having to re-engineer the complete software from "bottom-up" into smaller modules.
One further consideration on this project regards system scalability. The Use Cases for testing the ENTICE technology, i.e. Land Management, Infrastructure Monitoring and Disaster Response are designed for scaling the three main parts of the system (respectively Storage, Processing and Distribution) and having to response to variable data demand scenarios. Scaling the data supply side is currently limited to adjusting for sporadic changes on the data reception (failures in ground station antennas or satellites) or to well-known passing-by calendars as defined by satellite flight dynamics.
The implementation approach with ENTICE facilitates the high level implementation and optimization of the resources by reducing the size of the VMIs, enhancing the overall system functionality by eliminating unnecessary processes and the deployment time of instances, which directly affects to the increase in the performance of the product processors and to the reduction of VM storage and costs in the use of cloud IaaS (Infrastructure as a Service).
By using the ENTICE environment, it is expected to highly decrease the delivery time of the satellite imagery to end users and therefore to improve their accessibility, increasing the competitiveness of the EO industries. It will be possible thanks to the ENTICE environment, which will drastically reduce the required time for the creation and the deployment of the VMs. This will allow to support high demanding changes adjusting the infrastructure to serve these overloads, taking advantage of the flexibility and lower time provided by the ENTICE environment.
References
1) Stefano Cornara, Blanca Altés-Arlandis, Matthias Renard, Stephania Tonetti, Fabrizio Pirondini, Roberto Alacevich, Annalisa Mazzoleni, "Mission Design and Analysis for the DEIMOS-2 Earth Observation Mission," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-C1.4.9
2) Fabrizio Pirondini, Enrique Gonzalez, "DEIMOS-2: Cost-Effective, Very-High Resolution Multispectral Imagery," Proceedings of the 11th Annual JACIE (Joint Agency Commercial Imagery Evaluation ) Workshop, Fairfax, VA, USA, April 17-19, 2012, URL: http://calval.cr.usgs.gov/
wordpress/wp-content/uploads/Pirondini-Poster-Deimos-2-JACIE12-Apr12.pdf
3) Fabrizio Pirondini, "The DEIMOS Earth Observation System," , The Synergy of High Technology, Proceedings of Sovzond VI International Conference of Remote Sensing, Moscow, Russia, April 25-27, 2012, URL: http://www.sovzondconference.ru/upload/medialibrary/
831/831042c84f41610092c4aa281b0f4888.pdf
4) Diego Lozanno, "DEIMOS Optical missions," 3rd GS Coordination Body Workshop, ESA/ESRIN, Frascati, Italy, June 6-7, 2012, URL: http://earth.esa.int/gscb/papers/2012/20-Deimos_Optical_Missions.pdf
5) Jorge Gil, Alfredo Romo, Cristina Moclan, Fabrizio Pirondini, Enrique Gonzalez, Jesus Quirce, "The Deimos-2 Mission: Pre and post-launch calibration and data validation," 12th Annual JACIE (Joint Agency Commercial Imagery Evaluation) Workshop, St. Louis, MO, USA, April 16-18, 2013, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/Deimos-2-CALVAL-JACIE-2013-v2.0.pdf
6) Enrique González Laguna, Jesús Quirce García, Inmaculada Serrano, Álvaro Ortiz, Juan Ramón Gijón, Antonio Ramírez Giménez, Pablo Gallego, Javier Babé, "The Deimos-2 System and Program," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
7) "Satrec Initiative- Challenging Space Smart," URL: [web source no longer available]
8) Julio C. López, "DEIMOS-2: Cost-effective, Very-high Resolution Multispectral Imagery," 2013, URL: [web source no longer available]
9) Daniel Hernández, Mercedes Vázquez, Manuel Añón, Esperanza Olivo, Pablo Gallego , Pablo Morillo, Javier Parra, Simone Capraro , Mar Luengo, Beatriz García, Pablo Villacorta, "Environmental testing campaign and verification of satellite Deimos-2 at INTA," Proceedings of the13th European Conference on Spacecraft Structures, Materials & Environmental Testing (SSMET), Braunschweig, Germany, April 1-4, 2014, ESA SP-727
10) Patrick Blau, "Dnepr Rocket successfully Launches Cluster of 37 Satellites," Spaceflight 101, June 19, 2014, URL: http://www.spaceflight101.com/dnepr-launch-updates---2014-cluster-launch.html
11) William Graham, "Russian Dnepr rocket lofts record haul of 37 satellites," NASA Spaceflight.com, June 19, 2014, URL: http://www.nasaspaceflight.com/2014/06/russian-dnepr-rocket-record-launch-37-satellites/
12) "Russian-Ukrainian Dnepr to fly in the midst of political crisis," Russia in Space, June 20, 2014, URL: http://www.russianspaceweb.com/dnepr_020.html
13) "Deimos launched successfully," Elecnor Deimos, June 20, 2014, URL: http://www.deimos-space.com/en/
14) Patrick Blau, "Dnepr - 2014 Cluster Launch," Spaceflight 101, June 10, 2014, URL: http://www.spaceflight101.com/dnepr-launch-updates---2014-cluster-launch.html
15) "Deimos Imaging Wins $2.6 million U.S. Contract and Salutes the Brazilian Ministry of Defence," Satnews Daily, 16 May 2018, URL: http://www.satnews.com/story.php?number=1304263539
16) "Olympics from orbit: main stadiums and venues captured by Deimos-2," Deimos Imaging, Feb. 2018, URL: http://www.deimos-imaging.com/olympics-from-orbit-main-stadiums-and-venues-captured-by-deimos-2
17) "UrtheCast and SIIS sign agreement for the global distribution of their respective portfolios," UrtheCast Press Release, 21 Dec. 2017, URL: http://investors.urthecast.com/file.aspx?IID=4388192&FID=391539306
18) "SIIS and UrtheCast sign agreement for the global distribution of their respective portfolios," SIIS, 21 Dec. 2017, URL: http://www.si-imaging.com/newsroom/?uid=235&mod=document
19) Theras Wood, "Olympic views from space," UrtheCast, Aug. 11, 2016, URL: https://blog.urthecast.com/updates/urthecasts-rio-olympic-round-imagery-video-new-archives/?mc_cid=87b08679b3&mc_eid=982a8dfad4
20) Theras Wood, "UN Leverages UrtheCast Deimos-2 Data to Analyze Earthquake Destruction in Ecuador," UrtheCast, May 12, 2016, URL: http://tinyurl.com/hsyake9
21) Theras Wood, "UrtheCast welcomes two Earth Observation satellites to its mission," UrtheCast, July 15, 2015, URL: http://blog.urthecast.com/updates/urthecasts-new-satellites-provide-big-data/
22) "UrtheCast Closes Acquisition of Earth Observation Satellites and Business Operations from Elecnor," UrtheCast Press Release, July 15, 2015, URL: http://investors.urthecast.com/file.aspx?IID=4388192&FID=30295993
23) "DEIMOS-2 celebrates its first anniversary," Elecnor Deimos, June 19, 2015, URL: http://www.deimos-space.com/en/
24) "UK signs contract for UAE DubaiSat image applications," May 27, 2015, URL: http://www.arabianaerospace.aero/uk-signs-contract-for-uae-dubaisat-image-applications.html
25) "DEIMOS-2 is now a Copernicus Contributing Mission," April 17, 2015, eomag, EARSC, URL: https://eomag.eu/deimos-2-is-now-a-copernicus-contributing-mission/
26) "Eye on the Expo," Deimos Imaging S.L.U., March 23, 2015, URL: https://es-es.facebook.com/pages/Deimos-Imaging-SLU/138032652912280
27) "São Miguel, Azores," ESA, released on March 13, 2015 in the series 'Earth observation image of the week', URL: http://www.esa.int/spaceinimages/Images/2015/03/Sao_Miguel_Azores
28) "DEIMOS-2 Starts Commercial Operations," Deimos Elecnor, January 2015, URL: https://web.archive.org/web/20140221080623/http://www.deimos-space.com/en/
29) "DEIMOS-2 declares Initial Operational Capability and starts commercial operations," Nov. 3, 2014, URL: http://www.deimos-space.com/en/noticias/showNew.php?idNew=169
30) Fabrizio Pirondini, Salem Al Marri," The DubaiSat-2/Deimos-2 Constellation: Public Private Cooperation between Emirates and Spain," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14,B1,1.8
31) "Launch of the First Global Alliance of Earth Observation Satellites Operators," Elecnor Deimos, Press Release, Sept. 11, 2014, URL: http://www.deimos-space.com/files/archivos/Press_release_PanGeo_Elecnor_Deimos_12_09_2014.pdf
32) "EIAST joins global satellite alliance PanGeo," Arabian Aerospace online news service, October 2, 2014, URL: http://www.arabianaerospace.aero/eiast-joins-global-satellite-alliance-pangeo.html
33) "Pangeo Alliance: A Unique Earth Observation Constellation," PanGeo Alliance, URL: https://web.archive.org/web/20190103040938/http://www.pangeo-alliance.com/
34) "Elecnor Deimos publica las primeras imágenes del satélite DEIMOS-2," or in English: 'Elecnor Deimos published the first images of Deimos-2 satellite ,' La Comarca de Puertollnano, June 26, 2014, URL: http://www.lacomarcadepuertollano.com/diario/noticia/2014_06_26/47
35) "El satélite español Deimos 2 envía sus primeras imágenes," or in English: 'The Spanish satellite Deimos-2 sends its first images,' El Mundo, June 26, 2014, URL: http://www.elmundo.es/ciencia/2014/06/26/53ac4478ca47411a6d8b456f.html
36) "Llegan las primeras imágenes del Deimos 2," or in English: 'Here are the first two images of Deimos-2,' Lanza Digital, June 26, 2014, URL: http://www.lanzadigital.com/news/show/actualidad/llegan-las-primeras-imagenes-del-deimos-2/65686
37) Jorge Gil, Alfredo Romo, Cristina Moclan, Fabrizio Pirondini, Diego Lozano, Enrique Gonzalez, Jesus Quirce, "Deimos-2 Radiometric Calibration and Cross-calibration with Dubaisat-2," Proceedings of JACIE 2014 (Joint Agency Commercial Imagery Evaluation) Workshop, Louisville, Kentucky, March 26-28, 2014, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/14.021_Jorge-Gil_DE-2_DU-2-XCAL-JACIE-2014.pdf
38) Jorge Gil, Alfredo Romo, Cristina Moclán, Fabrizio Pirondini, "Deimos-2 Post-launch radiometric calibration," JACIE (Joint Agency Commercial Imagery Evaluation)Workshop , Tampa, FL, USA, May 4-8, 2015, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/Jorge-Gil_JACIE-2015_DEIMOS-2-post-launch-radiometric-calibration_fixed.pdf
39) Jorge Gil, Alfredo Romo, Cristina Moclán, Fabrizio Pirondini, "Deimos-2 post-launch radiometric calibration," 14th JACIE (Joint Agency Commercial Imagery Evaluation) Workshop, Tampa, FL, USA, May 5-7, 2015, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/Jorge-Gil_JACIE-2015_DEIMOS-2-post-launch-radiometric-calibration_fixed.pdf
40) A. Monge, S. Negrín, O. González, J. A. González, A. Ortíz, "gs4eo: a new ground segment for earth observation missions," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.4.6
41) Diego Lozano, "DEIMOS optical missions," 3rd GS Coordination Body Workshop ESA/ESRIN, Frascati, Italy, 6-7 June 2012, URL: http://earth.esa.int/gscb/papers/2012/20-Deimos_Optical_Missions.pdf
42) "Elecnor Deimos inaugurates its Puertollano Integration and Satellite Operation Centre, and presents its DEIMOS-2 Satellite," Elecnor Press Release, October 8, 2013, URL: http://www.elecnor.es/en/press/press/elecnor-deimos-inaugurates-its-puertollano-integration-and-satellite-operation-centre-and-presents-its-deimos-2-satellit
43) J. A. González, O. Gonzalez, A. Fernandez, A. Monge, F. Pirondini, A. Ortiz, "gs4EO : An Innovative Solution for Flight Operations Software on Low Cost Missions," SpaceOps 2014, 13th International Conference on Space Operations, Pasadena, CA, USA, May 5-9, 2014, paper: AIAA 2014-1724, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2014-1724
44) J. A. González, C. Fernández, F. Pirondini, "gs4EO: multi-mission user services and receiving stations," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B1.4.4
45) M. Renard, S. Tonetti, B. Altés-Arlandis, S. Cornara, F. Pirondini, "Fully Automated Mission Planning Tool for DEIMOS-2 Agile Satellite," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.3.2
46) José Julio Ramos, Jonathan Becedas, "Deimos' GS4EO over ENTICE: A cost-effective cloud-based solution to deploy and operate flexible Big EO Data systems with optimized performance," Proceedings of the 2016 Conference on Big Data from Space - BiDS'16, Santa Cruz de Tenerife, Spain, March 15-17, 2016, pp: 107-110, URL: http://publications.jrc.ec.europa.eu/repository/bitstream/JRC100655/LBNA27775ENN.pdf
47) "Elecnor Deimos focuses in the development of future internet technologies to improve Earth Observation Data processing and distribution," Elecnor Deimos, Feb. 29, 2016, URL: https://web.archive.org/web/20160801090200/http://www.deimos-space.com/en/noticias/showNew.php?idNew=220
48) "Entice," URL: https://web.archive.org/web/20150405004900/http://www.entice-project.eu/
49) Sam Newman, "Building Microservices," O'Reilly Media Inc., ISBN 978-1-4919-5035-7, Feb. 2015, URL: https://www.nginx.com/wp-content/uploads/2015/01/Building_Microservices_Nginx.pdf
50) "GEOSAT-2 Spain Coverage 2022 collection open to users", ESA, February 23, 2024, URL: https://earth.esa.int/eogateway/news/geosat-2-spain-coverage-2022-collection-open-to-users
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top