D-SAT (Deorbit Satellite)
EO
Atmosphere
Mission complete
Magnetic field (scalar)
Quick facts
Overview
| Mission type | EO |
| Agency | D-Orbit LCC |
| Mission status | Mission complete |
| Launch date | 23 Jun 2017 |
| End of life date | 10 Oct 2017 |
| Measurement domain | Atmosphere |
| Measurement detailed | Magnetic field (scalar), Atmospheric temperature (column/profile) |
| CEOS EO Handbook | See D-SAT (Deorbit Satellite) summary |
D-SAT CubeSat mission — demonstration of a decommissioning device
Spacecraft Launch Mission Status Test Campaigns Experiments References
D-SAT (Deorbit Satellite) is a technology demonstration nanosatellite, developed by the company D-Orbit LLC of Como, Italy, in order to test its proposed Decommissioning Device, aimed at ameliorating the space debris problem. It operated between June and October 2017, successfully validating the technology.
Context
The increasing population in space of defunct satellites and other man-made debris is an issue that is getting strongly the interest of legislators, agencies and industry. In order to guarantee a safer and sustainable access to orbit, it is necessary to stop the systematic non-operative defunct satellites concentration increase in orbit. This seems to be feasible with an approach based on a preventive debris removal solution, whereby a dedicated and independent de/re-orbiting propulsion system is installed on the satellite prior to launch allowing a safe and quick decommissioning of the spacecraft before it will become a debris. 1) 2) 3) 4)
Today both the industrial and scientific space communities agree that effective SDM (Space Debris Mitigation) measures are necessary in order to maintain future space activities below an acceptable level of risk. LEO (Low Earth Orbits), especially, together with the other upper orbits are getting more and more crowded and the space industry strongly depends on how the issue of space debris is effectively managed.
Space Agencies have introduced dedicated activities as the Clean Space Initiative of ESA, which is setting a clear roadmap towards the development of building blocks enabling the compliance of SDM requirements on future satellite platforms ; 5) the activities of the Orbital Debris Program Office of NASA, which was the first organization to develop orbital debris mitigation policy and guidelines already back into the 90s and now focusing the efforts on modeling, measurement, protection, mitigation and reentry issues;6) the activities of JAXA's Space Debris managed by the Innovative Technology Research Center. 7) Together with governmentally backed programs, there is a relevant number of activities that are proceeding as private initiatives on a commercial, quasi-commercial or private institutional basis.
Region | LEO | GEO | MEO | Launchers |
Europe | French Law, ESA | French Law, ESA, ITU | French Law, IADC, ITU, ESA | French Law, ESA |
United States | NASA, NOAA, FAA, DOD | NASA, FCC, FAA, ITU | NASA, FCC, FAA, DOD | NASA, NOAA, FAA, DOD |
Japan | JAXA | JAXA | JAXA | JAXA |
End-of-life disposal technologies are under development and testing, which can be divided into both passive:
• electromagnetic tethers: low mass, low volume, negligible power but no possibility of a controlled re-entry, non-compliance with regulations for large satellites, operationally complex, long time monitoring required. Not working if the satellite gets defunct.
• drag augmentation (e.g. sails, balloons, booms): low mass, low volume, negligible power but no possibility of a controlled re-entry, non-compliance with regulations for large satellites, operationally complex, only suitable altitudes below 600 km, long-time monitoring required, low TRL, increased impact probability with debris. Not working if the satellite gets defunct.
Active systems:
• electric propulsion: medium mass, low volume, space proven but low impulse (no controlled reentry), not compliance with regulations for direct re-entry of space vehicles, operationally complex, long time monitoring required, high power needed. Not working if the satellite gets defunct.
• liquid propulsion: medium mass, medium volume, already available on most spacecraft, space proven but very complex system, large mass and volume if controlled reentry has to be provided, high power needed.
• solid propulsion: medium mass, low volume, space proven, low level of complexity, high thrust, relevantly low impact on spacecraft design but mass impact on the spacecraft and no re-ignition possible.
Within this context, the company D-Orbit LLC of Como, Italy, is commercializing a unique device for satellite direct and controlled decommissioning called D3 (D-Orbit Decommissioning Device). 8) 9) 10)
A device using an independent system based on solid propulsion technology seems a practical and efficient option and can be implemented using current technologies. Such a device has the following features: it works even if the satellite is malfunctioning or death; it is compliant with ESA and NASA standards on safety; it is single point of failure free (except for the motor); it is reliable for the entire life of the satellite; it is scalable and adaptable to different kinds of missions.
D-SAT program - a challenge: In order to achieve and demonstrate the technology maturity and demonstrate space experience, D-Orbit decided to perform an in-orbit demonstration of such a device. The constraints on costs and mass led the company to work on the system miniaturization and to end up with the decision of manufacture a real satellite with the less volume and mass possible, with a fully and functional decommissioning device. The result was the design and development of a nanosatellite, D-SAT, based on a 3 Unit CubeSat standard. D-SAT will be launched in 2017 and after two months of nominal operations in orbit the Decommissioning Device will be activated and D-SAT will reenter the atmosphere in a safe and direct way, burning up because of the atmospheric drag over a predefined uninhabited area of the globe.
The main reasons why the company decided to invest in D-SAT project are:
• demonstrate the Decommissioning Device technology, which is the core business of the company, thanks to a full controlled-quick and safe re-entry of a LEO satellite through the D3 as an effort to demonstrate TRL 9 (Technology Readiness Level-9).
• gain visibility and boost the company brand
• create opportunities and increase cooperation and collaboration with other companies
• gain capabilities in nanosatellite manufacturing, validation and testing, both software and hardware
• gain experience in satellite operations
• gain capabilities in dealing with explosive materials and safety laws and regulations for storage, handling and transportation
• gain experience on the integration logistics of the Decommissioning Device in view of its use for other applications
• increase the space community awareness on space sustainability and the threat of space debris on space missions
• let the general public know about space debris and the potential risk at which all the satellite services are exposed
• let the satellite commercial operators know about D-Orbit technology they may use to increase their satellite lifetime in orbit, decrease complexity of the decommissioning phase, avoid collisions in orbit and eventually properly dispose the satellite avoiding extra costs.
The D-SAT mission is the first example of a CubeSat adopting a solid propellant motor for active deorbiting services at the end of its mission. The decommissioning device is installed in a 3U CubeSat, with the objective to remove the satellite from its service orbit through a controlled atmospheric reentry path.
The project started in 2014 and was initially financed by D-Orbit internal investments and from December 2015 part of D-SAT project has received funding from the European Union's Horizon 2020 research and innovation program.
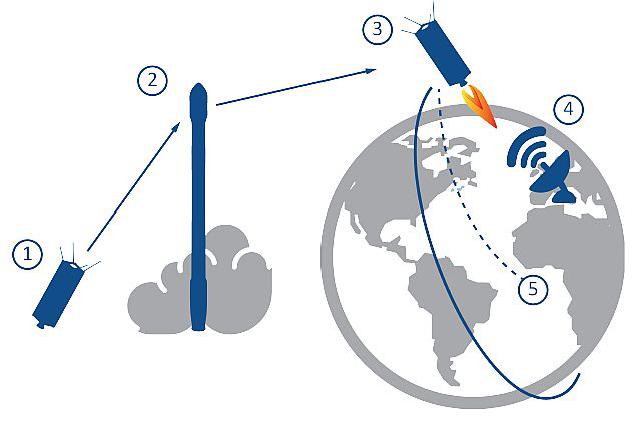
With reference to Figure 1, the main phases of the mission are: (1) D-SAT is loaded in the launcher, (2) D-SAT is deployed in a LEO orbit of 500 km altitude; (3) completed the LEOP operation, D-SAT performs the SatAlert, DeCAS and AtmoAnalyzer experiments, (4) completed the mission, D-SAT executes the firing maneuver controlled and commanded by ground, (5) the decommissioning maneuver location is high over the Atlantic Ocean to minimize the risk for people and assets during the atmospheric entry.
In order to identify, collect and understand the applicable requirements, and identify the best integration, test campaigns and transportation logistics, an extensive work was done in closed collaboration between the nanosatellite owner, D-Orbit, the solid rocket motor manufacturer, Bayern Chemie GmbH, Aschau am Inn, Germany, and the Launch Service Provider, Tyvak International. First of all, the EES (Electro Explosive Subsystem) and the solid rocket motor were individually qualified. These qualification test programs were based on major safety standards, as the ECSS (European Cooperation for Space Standardization), the Military Standard (MIL-STD-1576) and the Eastern-Western Range (EWR 127-1), the SMC-S-016 and related standards. Secondly, the satellite Qualification Model was tested in an inert configuration, to optimize the program scheduling and minimize costs. Finally, the satellite Flight Model went through the acceptance test program, which was identified merging ground handling, transportation, safety, launcher and CubeSat International Standard requirements.
Spacecraft
D-SAT is a nanosatellite designed on the 3U+ CubeSat standard with a mass < 4.5 kg. The satellite has been designed to maximize the reliability and consequently the mission success. Therefore D-SAT main functions are single point of failure free. Thanks to this valuable characteristic, D-SAT differs from the majority of current CubeSats and it may represent an innovative design model in the nanosatellite development.

D-SAT spacecraft is constituted by two identical units, called Unit 1 and Unit 2 (Figure 3). In cruise conditions, Unit 1 acts as "Master", which plays the role of the CubeSat platform, while the Unit 2 acts as "Slave", playing the role of the satellite payload.
In nominal operation the Unit 1 carries on all typical features of a platform; it is responsible of housekeeping, ADCS (Attitude Determination and Control Subsystem), energy charging and power distribution and radio communication with ground. In the meantime, the Unit 2 acts as "Slave", playing the role of the Unit deputed to the decommissioning function. Before the decommissioning phase, the control is transitioned to the Slave Unit, which provides a maneuver-suitable attitude, a stabilizing spin motion and finally the deorbiting maneuver.
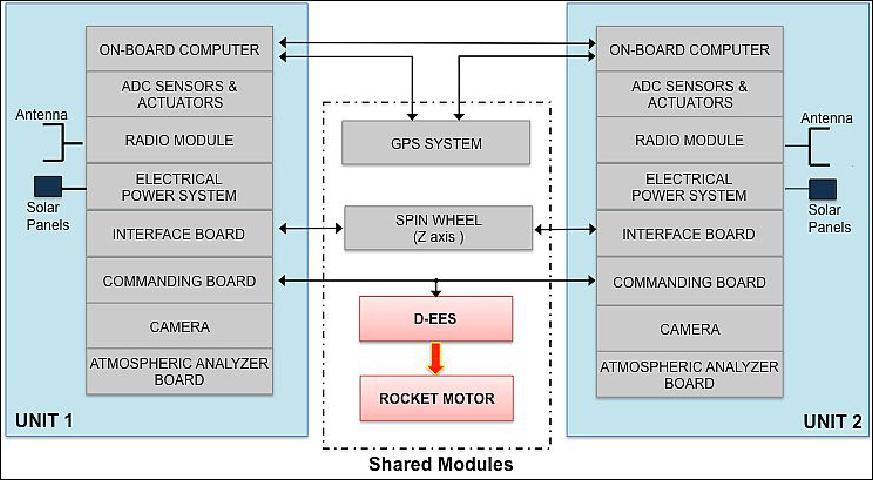
Both Units interface with the EES (Electro Explosive System) and the motor, thus if needed they are both fully capable to assume the role of Master or Slave. Thanks to the D-SAT architecture, the decommissioning function, consisting of a quick, reliable and safe deorbiting of the D-SAT spacecraft, is possible even if one of the two units is malfunctioning or dead.
The D-SAT nanosatellite includes the following components:
• 2 CubeSat-class systems, called Unit 1 and Unit 2, each containing:
- one on board computer OBC
- one interface board
- one S-band antenna
- one UHF radio module
- AOCS actuators (magnetorquers) and sensors (magnetometers, sun sensors, gyroscope)
- one EPS (Electric Power Subsystem) including batteries and solar arrays.
• A GPS receiver to accurately track the reentry trajectory after the decommissioning maneuver
• A spin wheel to impart angular momentum about the z-axis of the satellite, for passive stability during fire
• An EES comprehensive of the EED, the electric "Firing Circuit" and mechanical "Safe and Arm Device" part
• A solid propellant motor.
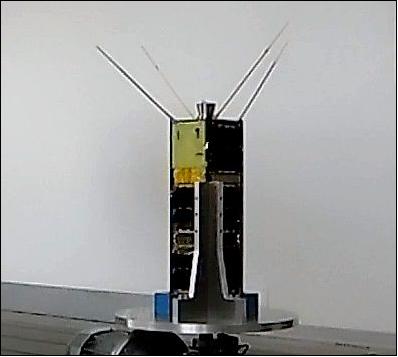
As of June 2016, the QM (Qualification Model) is now subjected to the qualification tests following the Launch Service Provider requirements (Figure 4).
Launch
The D-SAT nanosatellite was launched on June 23, 2017 (03:59 UTC) as a secondary payload on the PSLV-C38 vehicle in XL configuration of ISRO from SDSC (Satish Dhawan Space Center), India. The primary payload on this flight was CartoSat-2E (~712 kg), the sixth satellite in the Cartosat-2 series (total launch mass of ~955 kg). 11) 12) 13) 14)
Orbit: Sun-synchronous near-circular orbit, altitude of 505 km, inclination = 97.44º, LTDN (Local Time on Descending Node) at 9:30 hours.
Secondary Payloads
The 29 international customer nanosatellites were launched as part of the commercial arrangements between Antrix (Antrix Corporation Limited), a Government of India company under DOS (Department of Space) and the commercial arm of ISRO and the International customers.
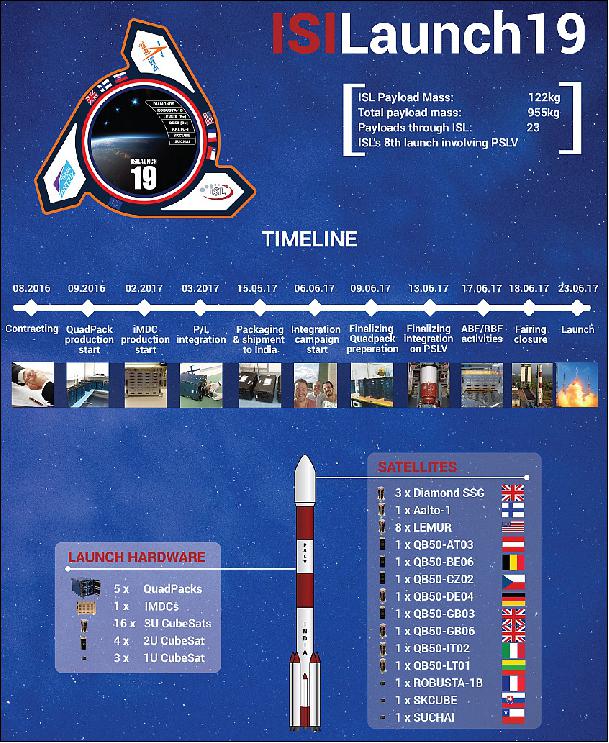
The Dutch company ISISpace (Innovative Solutions In Space) of Delft accommodated most of the secondary payloads aboard the multi-satellite launch (responsible for manifesting a total of 23 satellites on this particular launch). Engineers stowed the CubeSats in QuadPacks before shipping them to the Indian launch site. 15)
Among these 23 satellites, there are 8 CubeSats that will complement and complete the QB50 constellation for upper atmospheric research (www.qb50.eu). This project, sponsored by the European Commision's FP7 is managed by the Von Karman Institute from Belgium and ISISpace has been one of the consortium partners of QB50 since the start. The CubeSats launched by ISISpace into polar orbit will work together with the CubeSats deployed from the International Space Station in May.
The ISILaunch19 manifest also includes several payloads that were initially scheduled for a launch on a Falcon 9 mission through Spaceflight's Sherpa mission, a launch that was significantly delayed due to various factors. ISL and Spaceflight have jointly worked on re-manifesting these payloads to this PSLV launch to make sure our customer's satellites were launched earlier. Such a re-manifesting of payloads clearly shows the added value of the ISILaunch Services of ISISpace to serve the CubeSat community, offering access-to-space flexibility towards customers of launch services by operating across multiple launch vehicles and missions in parallel.
• NIUSAT (Noorul Islam University Satellite), located in Kumarakovil, Thuckalay, Kanyakumari District Tamil Nadu, India. NIUSAT is an Earth observation nanosatellite (15 kg). NIUSAT features a RGP camera with a ground resolution of 25 m and a frame size of 50 km x 50 km.
• CE-SAT-1 (Canon Electric Satellite-1), a microsatellite (50 kg) of Canon Electronics Space Technology Laboratory, Japan. The microsatellite features an optical imaging system based on a 40 cm diameter Cassegrain telescope.
• Max Valier, a nanosatellite (16 kg) of the "Max Valier" school Bolzano and the "Oskar von Miller" school Merano, in South Tyrol, Italy.
• D-SAT (Deorbit Satellite), a 3U CubeSat mission (3.5 kg) by the Italian company D-Orbit to demonstrate active end-of-life reentry.
• 3 Diamond nanosatellites (Blue, Green, Red) of Sky and Space Global, UK, developed by GomSpace ApS of Denmark. The three 3U CubeSats (each 6 kg) are pathfinders for Sky and Space Global's 200 Satellite LEO constellation.
• Pegasus, a nanosatellite (2U CubeSat) of FH Wiener Neustadt, Austria (thermosphere research). Pegasus is a member of the QB50 constellation with the m-NLP payload.
• InflateSail, a 3U CubeSat of SSC (Surrey Space Centre) at the University of Surrey, UK (technology demonstration nanosatellite). Part of the QB50 constellation. Inflatesail is designed to test a deployable sail as a means to deorbit the satellite. Inflatesail will use a 3.3 m sail at the end of a 1m boom deployed from the body of the satellite.
• UCLSat (University College London Satellite), a 2U CubeSat of UCL with the INMS (Ion and Neutral Mass Spectrometer), ionosphere research. UCLSat is part of the QB50 constellation.
• NUDTSat (National University of Defense Technology Satellite), Belgium, a 2U CubeSat of NUDT for ionosphere research. NUDTSat features a FIPEX instrument of the QB50 constellation.
• COMPASS-2 (DragSail CubeSat), a 3U CubeSat of FH Aachen, Germany (technology demonstration nanosatellite). COMPASS-2 is part of the QB50 constellation.
• LituanicaSAT-2, a 3U CubeSat of Vilnius University, Lithuania. The CubeSat is part of the QB50 constellation with a FIPEX payload.
• URSA MAIOR (University of Rome la SApienza MicroAttitude In ORbit testing), a 3U CubeSat to study the lower thermosphere. USRA MAIOR is a member of the QB50 constellation with the m-NLP payload.
• VZLUSat-1, a 2U CubeSat Czech technology nanosatellite of VTLU, developed in cooperation with Czech companies (RITE, HVP Plasma, 5M, TTS, IST) and universities (CVUT, University of West Bohemia). The nanosatellite carries on board the following experiments: a miniaturized X-ray telescope, composite material for radiation shielding, FIPEX, a QB50 instrument, to measure the concentration of oxygen in the thermosphere.
• SUCHAI-1 (Satellite of the University of Chile for Aerospace Investigation), a 1U CubeSat (1 kg).
• Venta-1, a nanosatellite (7.5 kg) of Ventspils University, Latvia, developed by Ventspils University College in cooperation with Ventspils High Technology Park, Bremen University of Applied Sciences and OHB Systems. Venta-1 carries an AIS (Automated Identification System ) receiver, which will pick up identification signals from ships at sea.
• Aalto-1, a Finnish student nanosatellite (3U CubeSat) of Aalto University, Aalto, Finland.
• ROBUSTA-1B (Radiation on Bipolar Test for University Satellite Application), a nanosatellite with a scientific experiment developed by the University of Montpellier students (France), a successor to the ROBUSTA satellite, which was launched in February 2012.
• skCube, a 1U CubeSat for educational and popularization outreach developed by SOSA (Slovak Organization for Space Activities ) at the University of Zilina. It is Slovakia's first satellite.
• CICERO-6 (Community Initiative for Cellular Earth Remote Observation-6), a 6U CubeSat of GeoOptics Inc. (~10 kg), Pasadena, CA, built by Tyvak Nanosatellite Systems. The objective is to demonstrate radio occultation observations for a commercial customer. CICERO-6 features Cion (CICERO Instrument for GPS-RO) with a mass of 1.2 kg. Cion has a size of 30 x 10 x 6 cm, power of 8 W. 16)
• Tyvak-53b, a technology 3U demonstrator by Tyvak Nanosatellite Systems, Inc. (Irvine, CA) to validate technology aimed at helping to deorbit small satellites.
• Lemur-2 x 8. Lemur-2 is commercial satellite constellation of Spire Global Inc., San Francisco, CA, The objective of the Lemur-2 constellation is ship tracking via AIS (Automatic Identification System) with SENSE. The STRATOS instrument makes use of GPS occultation measurements to determine temperature, pressure and humidity profiles of Earth's atmosphere for application in operational meteorology.
All 31 Satellites separated successfully. 17)
Mission Status
• October 10, 2017: The D-Sat mission has ended. After more than three months of orbital operations, D-Sat has completed its mission by test-firing its onboard propulsive unit. We reached most of our mission goals and, most importantly, we successfully validated our technology in space. However, even if the D-Orbit Decommissioning Device onboard fired, the important milestone of a direct and controlled decommissioning was not achieved. We are now studying the mission's data to apply the lessons learned to our next missions. 18) 19)
- D-Sat has concluded its mission, proving that D-Orbit Decommissioning Device (D3) is a flight-ready technology that can be integrated into the next-generation satellites. All subsystems, onboard sensors, and actuators have been working perfectly throughout the mission, and all three experiments — DeCAS, Atmosphere Analyzer, and SatAlert — produced remarkable scientific contributions.
- In D-Sat's design for redundancy, critical software, manufacturing, flawless orbital performance, and flight-worthiness of D3, we have achieved most of our mission's key objectives: the goal of a direct and controlled decommissioning, however, was not achieved.
- According to a preliminary analysis, the cause for the missed reentry of the satellite is related to the interface between the D3 and the small satellite: the alignment of the motor with the spacecraft's center of gravity resulted to be outside the designed tolerance. While we had put in place strategies to mitigate this outcome, we knew we had little margin to play with considering that the D3 installed onboard was designed for satellites one order of magnitude bigger.
- As in any space mission we had to make a tradeoff that included a calculated risk, i.e. by not installing a thrust vector control for the solid propellant motor because it would have been not suitable for the volume available in such a small satellite. The same D3 installed into a bigger satellite would allow a sufficiently reasonable misalignment tolerance between the motor and the spacecraft's center of gravity. The adoption of a thrust vector control will also remove the tolerance issue.
• August 2017: The mission is going well. The satellite is responding nominally to all commands and is performing right now two of the three independent experiments we have carried on board, the SatAlert experiment and the DeCas experiment. The D-Orbit Ground Control Team is performing several activities in preparation of the decommissioning maneuver: the demonstration of a controlled re-entry, executed by D-Orbit's proprietary autonomous decommissioning device based on solid rocket propulsion, is the main objective of the D-SAT mission. In the meantime, while in orbit, the Ground Control Team is periodically taking pictures of Earth from Space. 20) 21)
• July 19, 2016: First picture of southern Italy (Figure 6). — The following entries were taken from the update website of D-Sat.

• July 16, 2017: So far, D-Sat has traveled more than 12 million km. The satellite is performing two of the three independent experiments we have carried on board (SatAlert and DeCas experiment).
• July 1, 2017: The team is keeping its health in check through different LEOP (Launch and Early Operations Phase) tests and they will soon start testing the GPS and calibrating its sensors.
• June 26, 2017: The operations team was able to acquire the first picture from D-Sat!

D-SAT Test Campaigns
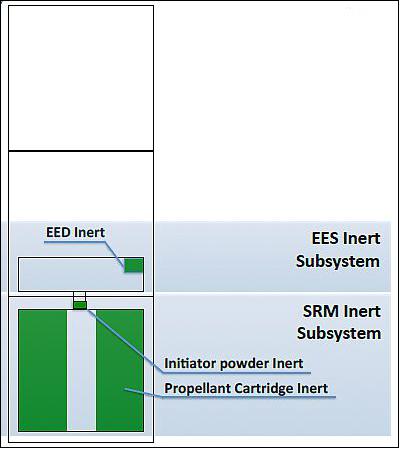
D-SAT Test philosophy: D-SAT FM (Flight Model) baseline acceptance test plan at satellite level consists of a set of acceptance tests performed in the spacecraft inert configuration, meaning that, inside the EES and the SRM (Solid Rocket Motor), the hazardous materials have been substituted with equivalent inert materials (Figure 8); the EES contains an Electro Explosive Device not containing explosive powder and similarly the SRM contains an inert initiator powder and inert propellant cartridge.
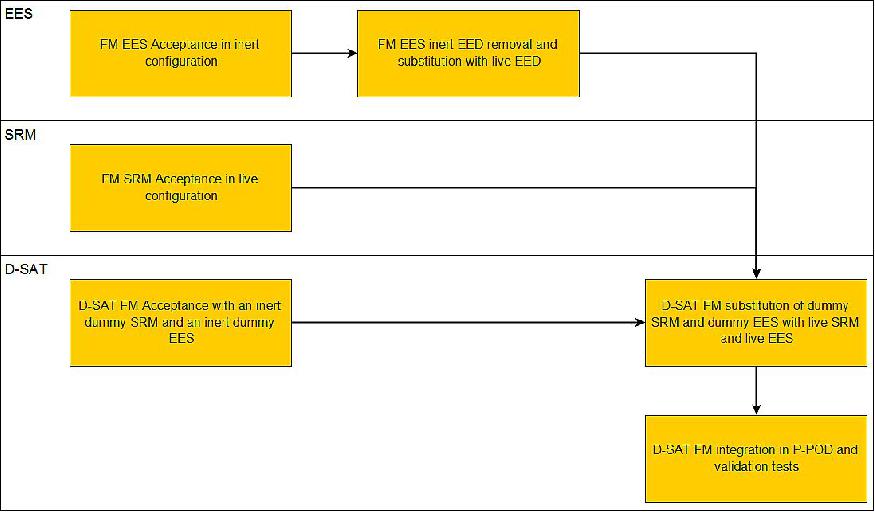
The test and integration approach with hazardous subsystems is reported in the block diagram of Figure 9. The test consist of random and sine vibration compliant with the launcher user guide and thermal vacuum basing on SMC Standard SMC-S-016 . After the tests, D-SAT is partially disassembled to integrate the Flight subsystems previously accepted at subsystem level. After reassembling D-SAT, a functional test is performed to verify a correct integration. Finally, D-SAT integration in the P-POD and functional tests after integration are performed. 22) 23)
EES (Electro Explosive Subsystem): An EES, designed with a SRM (Solid Rocket Motor) directly integrated with an igniter, EED (Electro Explosive Device), shall be controlled with a dedicated system that integrates several inhibits. With a deep investigation on the common standard related to EESs is clear that the most used standard is MIL-STD-1576, which was written in 1984, but always used. The MIL-STD-1576 lists several requirements on EES design for space application (manned mission or not) and many of these are focused on the safety aspect. The main functions of the EES are:
• Avoid an inadvertent ignition of the EED – 4 electrical inhibits: 3 controlled by command and 1 based on pyrotechnical chain status
• Avoid the ignition of SRM caused by an inadvertent ignition of the EED
• Monitoring of the state of the EES (safe state of arm state)
• Contain the gas generated by an inadvertent ignition of the EED.
Test Philosophy and tests performed: The test plan is a tailoring of SMC-S-016 and MIL-STD-1576. The tailoring was done in order to be compliant with cost and time schedule imposed by a typical CubeSat mission. The strategy in the tailoring is based on performing the most critical tests on the single critical components, the EED. The testing phase is composed by two sequential phases (design verification and qualification), for each of these are foreseen: environmental tests (thermal and vibration) and fire tests integrated with the motor, in order to demonstrate the full functionality of the EES directly with the SRM:
• Fire test – The coordination between D-Orbit and Bayern Chemie teams allowed to perform the fire tests integrated with SRM during its design verification/qualification path:
- 1° phase – during design verification, the pyrotechnical chain, that connect the EED with the SRM, was tested to high and low temperature (-30°C and +71°C) directly with the SRM
- 2° phase – during qualification, the assembly of pyrotechnical chain, the EED and the firing circuit was tested on the SRM at high and low temperature (-34°C and +71°C).
The tested unit are in inert configuration, with an inert EED; this is necessary for programmatic constraints (budget and scheduling). The EED is already subject to a qualification program performed by the manufacturer.
Each produced unit is subject to an acceptance test program:
• Functional test after production – Inert configuration
• Environment test (random vibration and thermal cycle) – Inert configuration
• Integration of EED and functional test.
Each EED is subject to its own acceptance program performed by the manufacturer.
Design verification program: The design verification program is executed in order to acquire confidence on the EES design. The tailoring of the test program is based on standards SMC-S-016, MIL-STD-1576 and EWR-127-1 satisfying budget constraints and the worst-case approach on test levels. The firing tests are executed with a reduced version of EES, in order to replicate the pyrotechnical chain. In these tests, D-Orbit verified the functionality of the chain EES+SRM+EED at low and high.
Test Results: The test executed on EES had positive results. The firing tests executed during the verification and qualification of SRM had positive results; all EES produced had passed the acceptance test.
D-SAT transportation: The transport of the D-SAT spacecraft presented some issues related to the included components and the classification of the device. The transportation of the satellite requires asking a formal evaluation to the European body in relation to classification products, i.e. Bundesanstalt für Materialforschung und -prüfung (BAM). Another issue related to the transport is regarding the authorizations needed to export the device from the European Union. The needed authorization and declarations are associated to the TARIC (Integrated Community Tariff) code. All the listed documents have to be collected and presented to the customs.
The actual transportation of the D-SAT spacecraft is assigned to an international forwarder with expertise in transport of space application devices.
Experiments
During its mission, together with the Decommissioning Device In-Orbit Demonstration, D-SAT will host different scientific experiments: in the cruise phase, D-SAT will carry out the "SatAlert" experiment, developed together with the CNIT (Consorzio Nazionale Interuniversitario per le Telecomunicazioni) and after the fire, during the reentry trajectory through the atmosphere, the DeCAS and the Atmo-Analyzer experiments will be performed (Ref. 3).
SatAlert Experiment
When a disaster happens, the delivery of alerts to the population is a key element to prevent tragic consequences and increase the efficiency of the planned reaction to the event. The SatAlert Experiment is a part of the standardization activity devoted to the definition of MAMES (Multiple Alert Message Encapsulation protocol over Satellite) for the delivery of alerts to the population in the case of a disaster. The MAMES main objective is the definition of an extensible multiple alert message encapsulation protocol for alert messages transport over satellite links. In particular MAMES provides a means for encapsulating one or more differently formatted alert messages [e.g. CAP (Common Alert Protocol) , unstructured text, image, paging protocols, DeCAS messages]. 24)
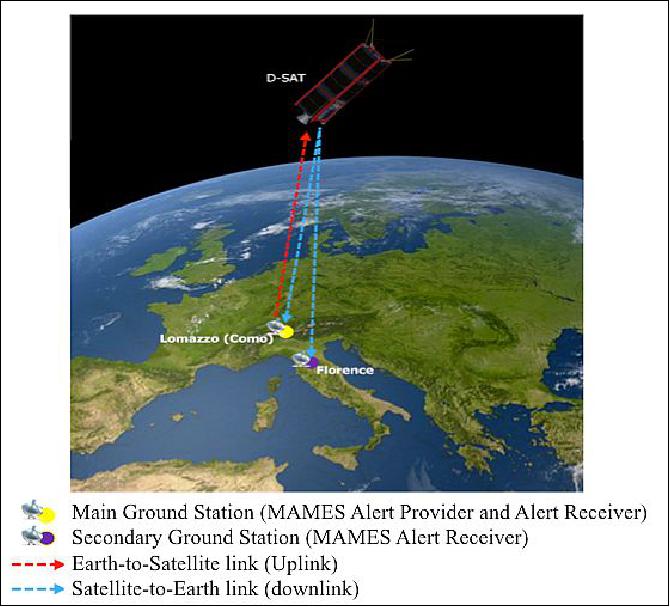
The SatAlert experiment aims to verify the transmission setup of MAMES messages from the MAMES Alert Provider to the MAMES Alert Receiver. The experiment consists in the generation and transmission of a MAMES ALERT message, from an Earth station to satellite, which will process and broadcast the received message back to Earth. In order to validate the process, two separate Earth stations for satellite beacon tracking will be implemented. The main ground station will be located in Lomazzo (Italy) at D-Orbit's premise and it will be responsible for the generation and transmission of the MAMES Messages and also for the reception and decapsulation of them; while a second ground station located in Florence (Italy) will only receive and decapsulate MAMES messages (Figure 10).
DeCAS (Debris Collision Alerting System) Experiment
In Earth's orbit, there are about 13,000 objects. For most of them, the disposal will be through the reentry into the atmosphere as required by international agreements between agencies in different countries. (i.e NASA Safety Standard 8719.14 - Process for Limiting Orbital Debris, Ref. 24). With the new satellite technologies and the advent of space tourism, SV reentries in the atmosphere are expected to rise considerably over the next few years. Today we are forced to close airspace supposedly concerned with these reentries (with strong economic impact) and to live moments of uncertainty and apprehension. The fragmentation of a space vehicle (satellite or spacecraft) during reentry to the Earth can be planned or accidental, as in the case of Columbia. The debris that is generated, whose position is always uncertain, can be very dangerous to the population and to high-risk industrial plants (i.e. nuclear power plants) and to the civil and military aviation (a fragment more than 300 gr causes loss of aircraft). Knowing the location and the extent of the debris (or danger area), as well as its dynamics, allows to secure and notify all potentially interested parties in time. This leads to a need for aerospace safety of a system able to determine the exact condition of explosion / fragmentation of Space Vehicle and to send an early warning to the users potentially affected by transmitting the dynamics of Danger Area to all interested users and providing the elements to "suggest" to pilots an initial escape heading to avoid danger area.
The patented DeCAS device is small in size and lightweight based on the principle of the black box of the aircraft and it uses space technologies already tested for data broadcasting. It works as a "smart fragment" which can autonomously determine its own position during reentry and which knows its relative location in the projected hazard area which has been pre-computed on ground and/or its data are used directly from a ground station to determine the Dangerous Area. It is fitted into or on the vehicle during the construction phase remaining in a dormant status until it activates by itself at the moment of fragmentation of space vehicle sending information about its location (which corresponds to the space debris area). - Hence the DeCAS system aims to inform both the air traffic and the population of an imminent danger due to the fall of space debris caused by controlled or uncontrolled reentry of the space vehicle on which it is mounted. It is useful both in the launch phase (detachment and reentry of the various stages of combustion) and in the reentry phase.
The D-SAT mission will have the capability of the DeCAS system on board, thus allowing the latter to make its first in-orbit validation test. With D-SAT in orbit, an uncontrolled re-entry will be simulated by sending to D-SAT a trigger message which in turn will generate a message towards the ground with the necessary parameters to define its footprint. Once the message is received by the ground stations, it will be processed by a special software, which will calculate the position of the footprint and will make a prediction of the time and the area of impact on the ground.
Once the danger area will be defined, the DeCAS message will be encapsulated, uploaded to the satellite and broadcasted to ground by the MAMES protocol. This second phase has the aim to verify the possibility of using an emergency protocol for the transmission of DeCAS messages that allows their validation and authenticity.
The third aim of this mission is to simulate a network of ground stations able to receive the signal, process it and transmit the information to all potential customers and agencies. To achieve this purpose, Aviosonic has partnered with companies and government agencies, which will provide facilities capable of receiving the signal and process it with the software that will be provided to them. The success of D-SAT mission is fundamental for Aviosonic because it will open the way to the second phase of the system development and to the drawing-up of preliminary agreements for its marketing.
DAA (D-Orbit Atmosphere Analyzer) Experiment
DAA (D-Orbit Atmosphere Analyzer), also referred to as Atmo-Analyzer Experiment, is a sensor developed by D-Orbit able to analyze and retrieve atmospheric data during its reentry through the atmosphere and send them to specific fixed or mobile ground stations. During the reentry phase, DAA will retrieve atmospheric data during the satellite descent, and post processing analysis of the raw data will produce valuable data for customers. Among the main users for DAA data will be insurance companies, weather agencies and telecommunication companies that are interested in measuring scientific data in the MLT (Mesosphere and Lower Thermosphere) region. The DAA major competitive advantage is the type and quality of data collected. DAA is being developed in the scope of the European Space Agency's Business Incubation Center (ESA BIC) in Portugal and has been granted SME (Small and Medium sized manufacturing Enterprise) Instrument Phase 1 from the European Commission, benefiting from both business and technical support. In this first version, DAA will measure temperature, GPS signal and the magnetic field during D-SAT descend towards Earth.
References
1) Alessio Fanfani, Simone Brilli, Matteo Trotti, Angelo Dainotto, Elena Toson, Alexander Weigand, Fabio Nichele, "Launch of a 3 Unit CubeSat with integrated propulsion system: D-SAT qualification, acceptance and transportation logistics," Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16-B4.6B.8
2) "D-Sat mission brochure," D-Orbit, URL: [web source no longer available]
3) Elena Toson, Alessio Fanfani, Luca Simone Ronga, Piermarco Martegani, Luca Rossettini, "D‐SAT Mission: an In‐Orbit Demonstration of a Solid Propellant Satellite Decommissioning Device," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Valletta, Malta, 30 May – 3 June 2016
4) "D-Sat -Tthe Mission," URL: [web source no longer available]
5) "Clean Space," ESA, 2016, URL: http://www.esa.int/Our_Activities/Space_Engineering_Technology/Clean_Space
6) http://orbitaldebris.jsc.nasa.gov/mitigate/mitigation.html
7) Seishiro Kibe, "JAXA's Space Debris Related Activities : Mitigation, R&D," 2013, URL: http://www.stardust2013.eu/Portals/63/Images/Training/OTS%20Repository
/JAXA%E2%80%99s%20Space%20Debris%20Related%20Activities.pdf
8) Luca Rossettini, "D-Orbit Solutions for our Future,"10th ESA Workshop on ADCSS (Avionics, Data, Control and Software Systems), ESA/ESTEC, Noordwijk, The Netherlands,Oct. 18-20, 2016, URL: [web source no longer available]
9) E. Toson, S. Antonetti, M. Trotti, L. Ferrario, L. Rossettini, "A Satellite Dedicated Decommissioning Device based on Solid Rocket Motor Technology, 6th EUCASS (European Conference for Aeronautics and Space Sciences) 2015. 29 June - 3 July, Krakow, Poland
10) "D3 Technical Sheet," D-Orbit, URL: https://web.archive.org/web/20190202212916/http://www.deorbitaldevices.com/wp-content/uploads/2016/06/D3-Technical-Sheet.pdf
11) "PSLV-C38 / Cartosat-2 Series Satellite," ISRO, June 23, 2017, URL: http://www.isro.gov.in/launcher/pslv-c38-cartosat-2-series-satellite
12) "Indian Launch Manifest of April 15, 2017," URL: http://www.sworld.com.au/steven/space/india-man.txt
13) "Indian Launch Manifest of April 15, 2017," URL: http://www.sworld.com.au/steven/space/india-man.txt
14) "D-Sat Space Debris Mitigation Mission Successfully Launched By D-Orbit," D-Orbit Press Release, June 27, 2017, URL: http://spaceref.com/news/viewpr.html?pid=51117
15) Andra, "Successful ISILaunch19 campaign," ISILaunch19, June 23, 2017, URL: http://blog.isilaunch.com/successful-isilaunch19-campaign/
16) Dave Williamson, "Small Satellites: The Execution and Launch of a GPS Radio Occultation Instrument in a 6U Nanosatellite," 33rd Space Symposium, Colorado Springs, CO, USA, April 3-6, 2017, URL of presentation: https://www.spacesymposium.org/wp-content/uploads/2017/10/Williamson_Dave_GPS_Radio_Occultation_Talk-v1.pdf
17) "PSLV-C38 / Cartosat-2 Series Satellite Mission: All 31 Satellites separated successfully," ISRO, June 23, 2017, URL: http://www.isro.gov.in/update/23-jun-2017/pslv-c38-cartosat-2
-series-satellite-mission-all-31-satellites-separated
18) "Post-mission updates," D-Sat, October 10, 2017, URL: https://www.dsat.space/mission-updates
19) L. Ferrario, A. Fanfani, M. Bevilacqua, S. Brilli, M. Trotti, A. Dainotto, M. Cazzaniga, F. Palumbo, A. Marcovati, L. Vallini, M. Cazzaniga, S. Antonetti, "EOL Operations of the D-SAT Satellite: an In-Orbit Demonstration of Satellite Controlled Re-entry," Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-A6.10
20) Information provided by Matteo Trotti, Quality and Impact Manager, D-Orbit LLC, Como, Italy
21) "D-Sat," URL: https://www.dsat.space/
22) "User Manual - Interface Requirements for launching Auxiliary satellites in PSLV", 15 December 2014, PSLV_UsersGuide_20141215
23) SMC Standard SMC-S-016, "Test requirement for launch, upper-stage and space vehicles",Space and Missile Systems Center Standard, Air Force Space Command, 5 September 2014, URL: http://everyspec.com/USAF/USAF-SMC/download
.php?spec=SMC-S-016_05SEP2014.051608.pdf
24) "Process for Limiting Orbital Debris," NASA Technical Standard, STD-8719.14A, Approved: 2011-12-08, Change 1 approved: 2012-05-25, URL: http://www.hq.nasa.gov/office/codeq/doctree/871914.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Test Campaigns Experiments References Back to Top