ExoMars 2022
Non-EO
ESA
NASA
Planned
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ESA, NASA |
| Mission status | Planned |
ExoMars 2022 Mission (formerly ExoMars 2020)
Concept Launch Development Status Payloads References
The ExoMars program, consisting of two missions, is the first step of ESA's Aurora Exploration Program and is developed in a broad ESA and Roscosmos cooperation, with a contribution from NASA in the areas of Mars proximity Communications and the scientific payloads. It addresses the scientific question of whether life ever existed on Mars and will demonstrate key technologies for entry, descent, landing, drilling and roving on the Martian surface. 1) 2)
The 2020 mission of the ExoMars program will deliver a European rover and a Russian surface platform to the surface of Mars. A Proton rocket will be used to launch the mission, which will arrive to Mars after a nine-month journey. The ExoMars rover will travel across the Martian surface to search for signs of life. It will collect samples with a drill and analyse them with next-generation instruments. ExoMars will be the first mission to combine the capability to move across the surface and to study Mars at depth. 3)
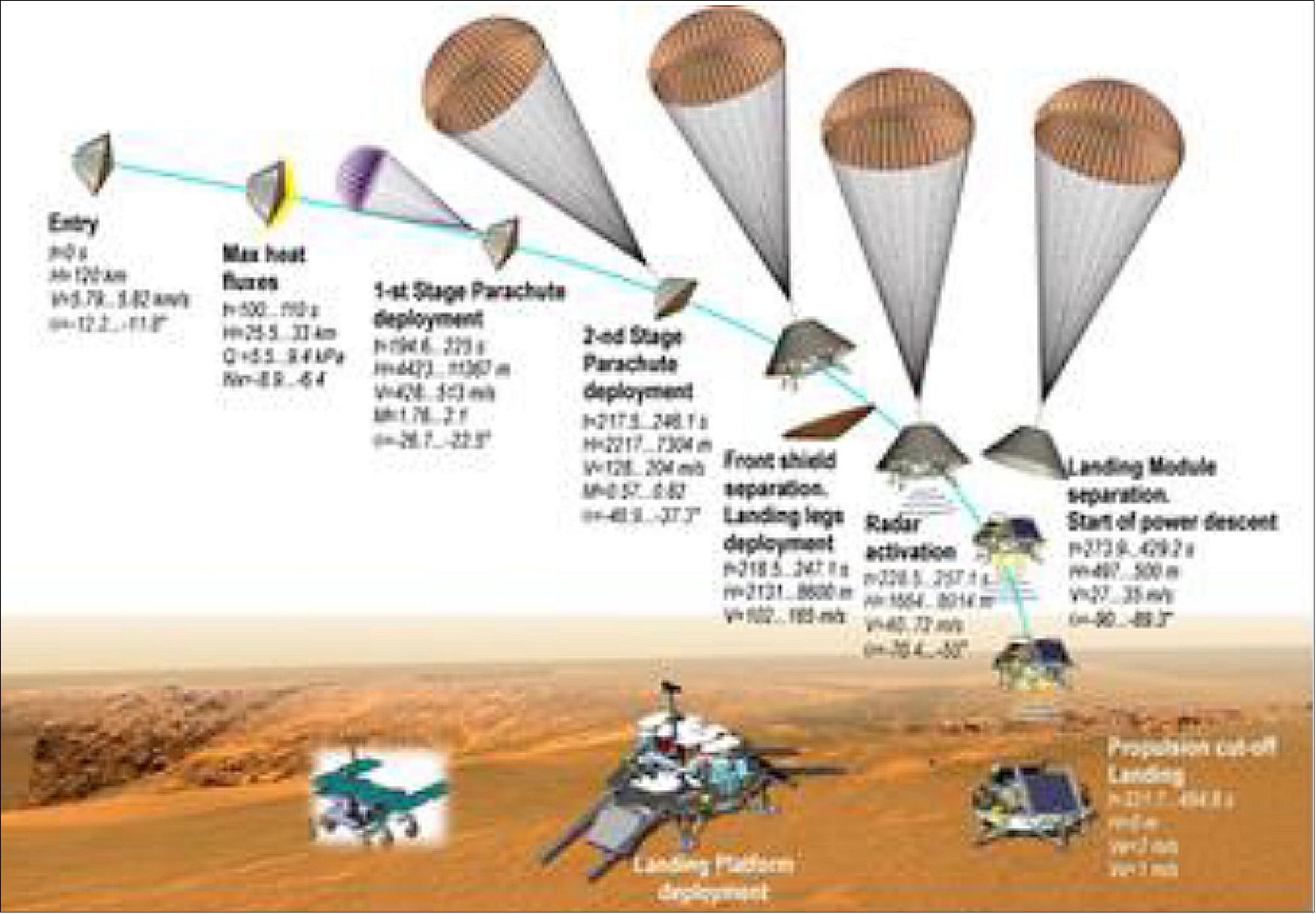
During launch and cruise phase, a carrier module (provided by ESA) will transport the surface platform and the rover within a single aeroshell. A descent module (provided by Roscosmos with some contributions by ESA) will separate from the carrier shortly before reaching the Martian atmosphere. During the descent phase, a heat shield will protect the payload from the severe heat flux. Parachutes, thrusters, and damping systems will reduce the speed, allowing a controlled landing on the surface of Mars.
The ExoMARS 2020 Program will secure the development and qualification of the following technologies:
• Entry, Descent and Landing (EDL) of a payload on the surface of Mars
• Surface mobility with a Rover
• Access to the sub-surface to acquire and analyze in-situ Mars terrain samples
• Qualification of Russian ground-based means for deep-space communication in cooperation with ESA’s ESTRACK
• Adaptation of Russian on-board computer for deep space missions and ExoMars landed operations
• Development and qualification of throttleable braking engines for prospective planetary landing missions.
The above activities will be carried out in accordance with the ESA Policy on Planetary Protection, which complies with the COSPAR planetary protection recommendations.
The ExoMars Program scientific objectives are to:
• Search for signs of past and present life on Mars
• Investigate the water/geochemical environment as a function of depth in the shallow subsurface
• Investigate Martian atmospheric trace gases and their sources
• Investigate and solve scientific problems within the composition of Mars Surface long-living stationary platform.
A further objective of the ExoMars Program is to provide data relay services, through the TGO (Trace Gas Orbiter), for landed assets on the surface of Mars until the end of 2022.
All these objectives will be pursued as part of a broad international cooperation with Roscosmos and NASA, having as long-term goal an international Mars sample return mission.
The RSP (Rover and Surface Platform) mission of the ExoMars program of ESA will deliver a European ExoMars Rover and a Russian Surface Platform to the surface of Mars. The primary objective is to land the rover at a site with high potential for finding well-preserved organic material, particularly from the very early history of the planet.
ExoMars RSP (Rover and Surface Platform) Mission and System Concept
The ExoMars RSP mission is foreseen to be launched into a direct transfer to Mars in July 2020. The transfer is ballistic; there are no deterministic Deep Space Maneuvers (DSM), only stochastic navigation maneuvers, some of which have a deterministic component for planetary protection reasons (Ref. 1). 4) 5) 6) 7) 8)
In the current mission design, the launch period has a duration of 20 days. Out of these 20 days, with the six allocated Proton-M/Breeze-M launcher programs, it will be possible to have at least six days of launchability within the launch period arranged in groups of two: two days at the start, two in the middle and two at the end of the launch period. The days in between are gaps of non-launchability.
All dates in a given launch period lead to arrival on the same date. This simplifies operations planning and ground station booking, though it also removes one degree of freedom from the trajectory design.
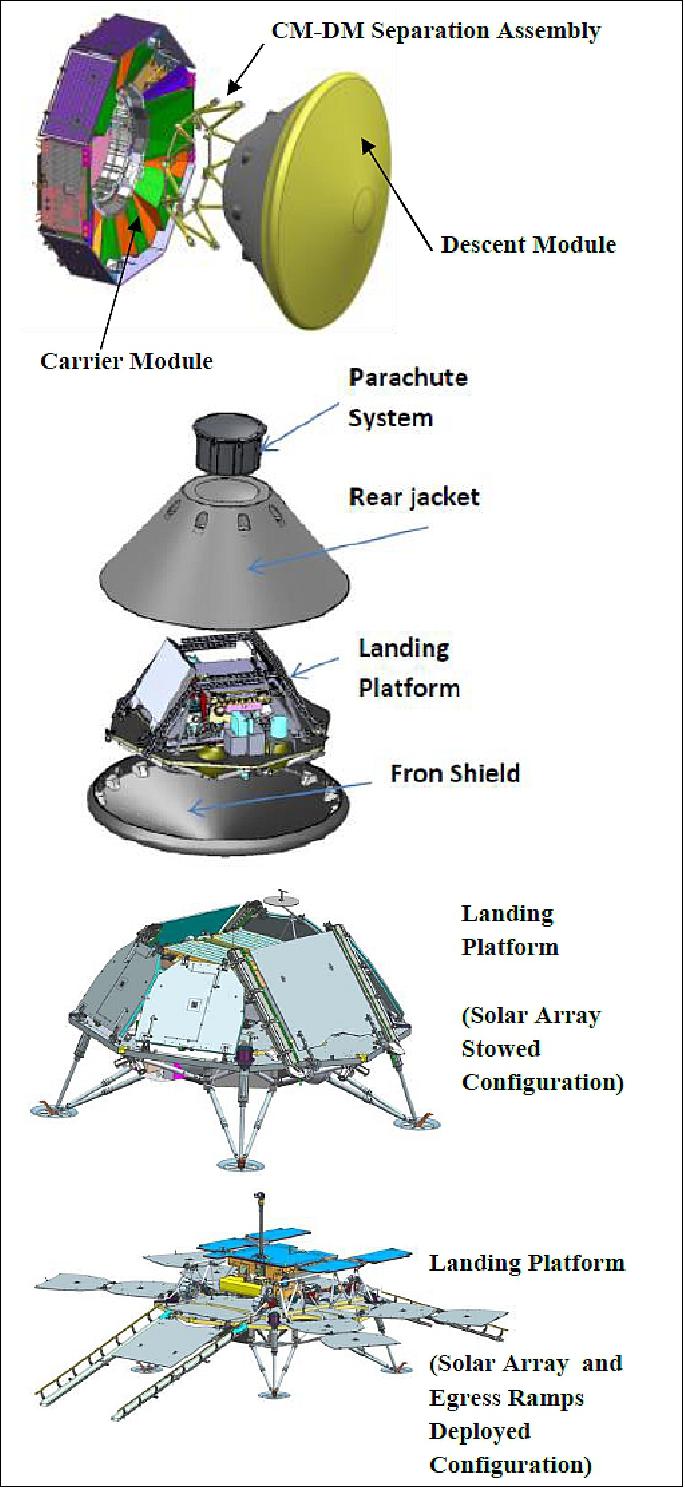
The 2.9 ton SCC ( SpaceCraft Composite), developed by Thales Alenia Space in Italy under ESA contract, is composed of a CM (Carrier Module) and a 2 ton DM (Descent Module) provided by Roscosmos of Russia, which carries the 350 kg RM (Rover Module), also provided by ESA.
Industrial consortium: On the 2020 mission, Thales Alenia Space in Italy, is in charge of the design, development and verification of the entire system, the development of the Carrier Module navigation and guidance system and perform EDL/GNC development, the Rover System, including the Analytical Laboratory Drawer (ALD) as well as supplying basic parts of the DM, including the Radar Altimeter. In addition, Thales Alenia Space in Italy implements a deep technical partnership with Lavochkin for the development of the Descent Module (DM). OHB is in charge to develop the CM as well as ALD SPDS Mechanism and delegated tasks, the Rover Vehicle itself is provided by Airbus Defence and Space in UK. Leonardo is developing the ExoMars 2020 drill, which will dig into the Mars subsoil to a depth of two meters and ALTEC (Aerospace Logistics Technology Engineering), a Thales Alenia Space in Italy (63.75%) and ASI (36.25%) company – will also be responsible for the design, development and maintenance of the ROCC (Rover Operation Control Center) and for controlling the Rover on the Martian surface (Ref. 58).
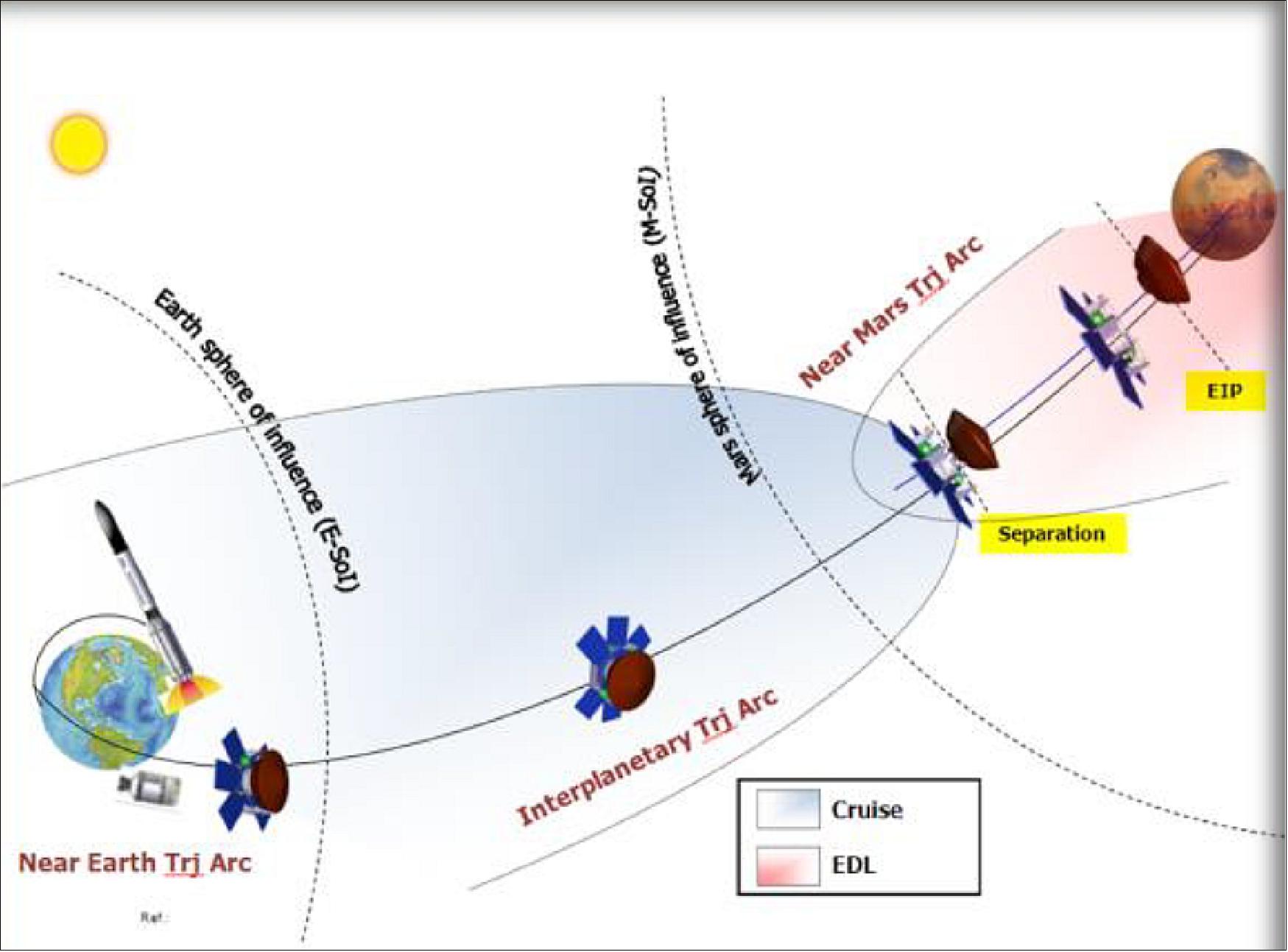
The CM (Carrier Module), developed by OHB (Bremen, Germany), implements all the tasks needed to carry the whole system close to Mars atmospheric borders. It executes all the necessary maneuvers in interplanetary transfer and targets the trajectory such that the DM will enter at the required entry flight path angle and that the lander will touch down at the required location. Separation of the CM from the DM is currently foreseen to occur at EIP-30 minutes. The CM is not foreseen to operate after separation form the DM (Descent Module).
The CM and DM modules are mated by means of a separation mechanism bolted on both sides on 8 I/F points (pyrolocks on DM Rear Jacket side). Cable disconnection at separation is implemented by cutters.
The DM (Descent Module), developed by Lavochkin (Ru) with the contribution of key European Hardware and Software system contributions (see below), is a blunt-shape reentry capsule made of four separate main parts, FS (Front Shield), RJ (Rear Jacket), LP (Landing Platform) and PAS (PArachute System), performs the Entry, Descent and Landing on the Martian surface of a Landing Platform.
In particular the European Hard- and Software contributions consists of:
• The On-Board Computer, developed by Crisa (E), which manages the whole ExoMars 2020 mission during Cruise, EDL and Mars Surface Operation phases running the whole Mission Software,, developed by TAS (I).
• The IMU (Inertial Measurement Unit), developed by Airbus Defence and Space (ADS-F), which supports GNC during both Cruise and EDL phases
• The Radar Altimeter, developed by TAS (I), which is used to control the landing phase
• The UHF Transponder and Landing Platform Antenna, developed, respectively, by QinetiQ (UK) and Tryo (E), used for the proximity communications with the TGO
• The PArachute System, developed by TAS (F).
The DM accommodates the RM and provides for its egress to the Martian surface.
The LP (Landing Platform), following the departure of the Rover, becomes SP (Surface Platform) for a long-lived stationary science instrument suite to study the Martian environment at the landing site. The 45 kg instrument suite with a planned lifetime of 2 Earth years is foreseen to consist of twelve instruments: In particular:
- TSPP (4 Cameras)
- MTK (Meteorology Package)
- RAT-M (Radiometer)
- MAIGRET (magnetometer)
- SAM (Seismometer)
- LaRa (Radioscience Mars Geodesy)
- PK (Dust Studies)
- M-DLS (Atmospheric Laser Spectrometer)
- FAST (Trace Gas Fourier Spectrometer)
- MGAK (Gas Analytical Package)
- Adron-EM (Neutron Spectrometer)
- HABIT (Humidity And Radiation Sensor)
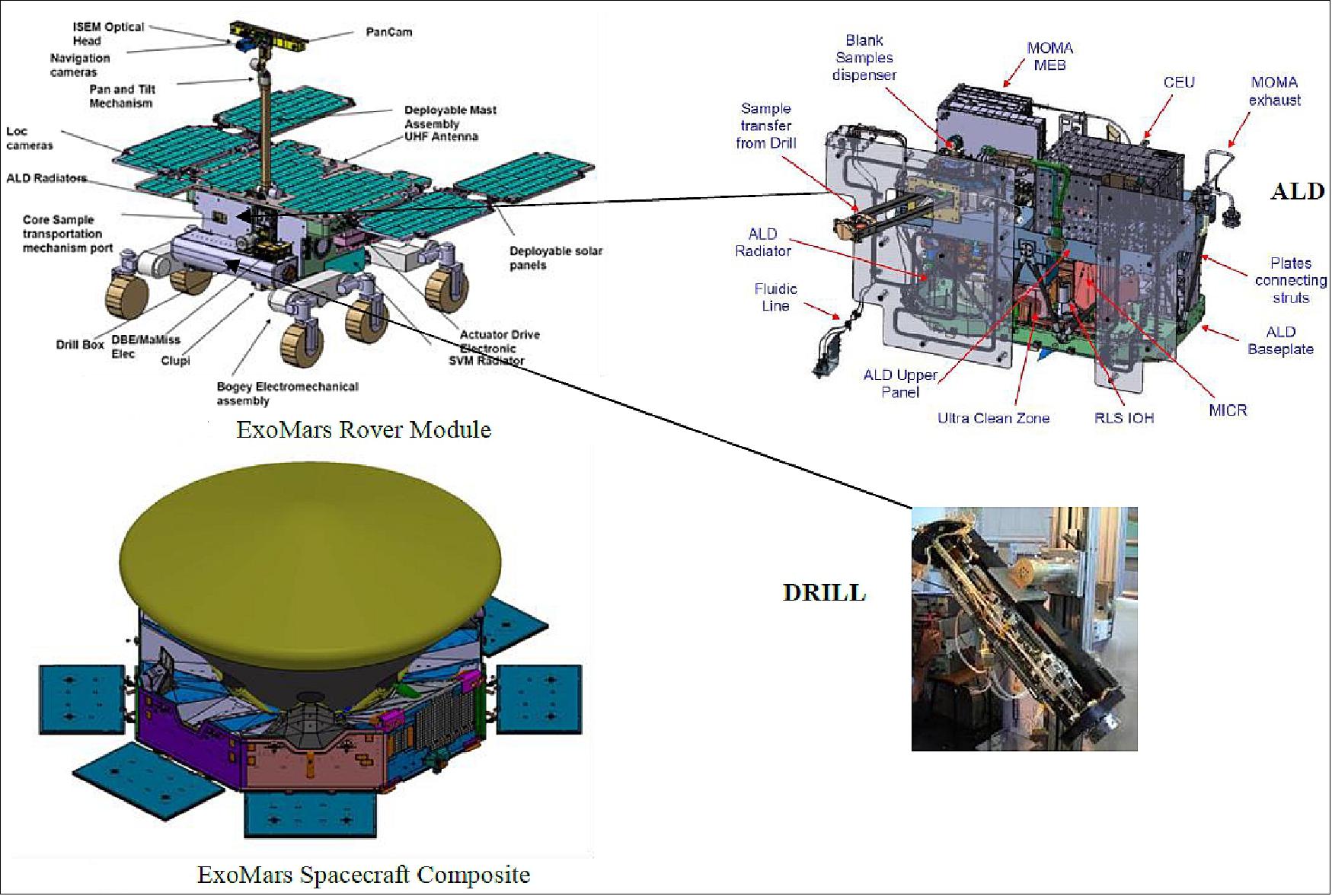
The RM (Rover Module), developed under the responsibility of TAS (I), consists of a RV (Rover Vehicle) which carries an ALD (Analytical Laboratory and Drill) for subsurface sampling (down to 2 m).
The RV is made by Airbus Defence and Space (ADS-UK), the ALD is developed by TAS (I) with OHB (D) providing the sample processing and handling mechanisms and the Drill is developed by Leonardo (I) . The Rover Module contains European, Russian and NASA scientific payloads. The Rover is designed to deploy and egress from the DM Landing Platform, and to perform science exploration on the Mars surface with a suite of dedicated instruments.
RM Scientific package consists of the Pasteur Payload (PPL) composed of:
• 6 Survey Payloads
- Panoramic Cameras (WACs + HRC) PanCam
- Ground Penetrating Radar for Water Ice Subsurface Deposit Observation on Mars - WISDOM
- Close-Up Imager - CLUPI
- Mars Multispectral Imager for Subsurface Studies - Ma_Miss (in Drill)
- Neutron Detector – ADRON-RM (Roscomos - IKI)
- Infrared Spectrometer for ExoMars - ISEM (Roscomos - IKI)
• 3 Analytical Payloads (part of ALD)
- Infrared Microscope (MicrOmega)
- Raman Laser Spectrometer (RLS)
- Mars Organic Molecule Analyzer - (MOMA)
Note: The ALD is an integrated laboratory able to collect and prepare Martian terrain specimen from the Drill, handle and process them to the on board scientific instruments for in situ analysis, in a ultra-clean environment.
ExoMars RSP Mission Management
The 2020 mission operations, planning and execution will be performed by the MOC (Mission Operation Center) located at ESOC in Darmstadt with the support of:
• the SCC MOC
• the Rover Operations Control Center (ROCC)
• the Surface Platform Payload Operations Control Center (SPOCC)
• the TGO MOC, starting only from the EDL phase.
In particular ESOC/MOC will be responsible of controlling the SCC (and DM/LP) since Launcher separation up the Rover egress on the Mars surface. ESOC/MOC will be also responsible through ERCO (ESA Relay Coordination Office) in leading the ESA Data Relay Orbiter operations acting as data communication hub also to/from ROCC and SPOCC, starting from Launch until the egress of the RM after the LP landing on the Martian surface. Note: this very delicate last phase of the mission is named Post Landing to Egress (PLTE). 9)
After the RM egress, the ExoMars Rover mission will be independent and developed under the full responsibility of the ROCC while the Landing Platform Mission will be under the responsibility of the SPOCC (both via ERCO).
The X-band communications will use:
• The ESA Ground Station & Communications Subnet (ESTRACK)
• The NASA Ground Stations & Communication Subnet (DSN), to be considered for “critical phases“ like Safe Mode(s) or Flight Software upload or for “extreme contingencies” like the loss of SCC attitude
• The Russian Ground Stations & Communication Subnet (RNS).
During the LP (Landing Platform) mission the communication are performed via UHF band between On Board Computer (OBC1) and TGO (or NASA available Orbiters) during scheduled communication windows on visibility passes.
The Science Data Archive will make use of:
• The Pasteur payload Science Data Archiving and Dissemination located at ESAC, Spain
• The Science Data Archiving centers (NASA PDS and ESA PSA)
• Russian Science Ground Segment (NNK).

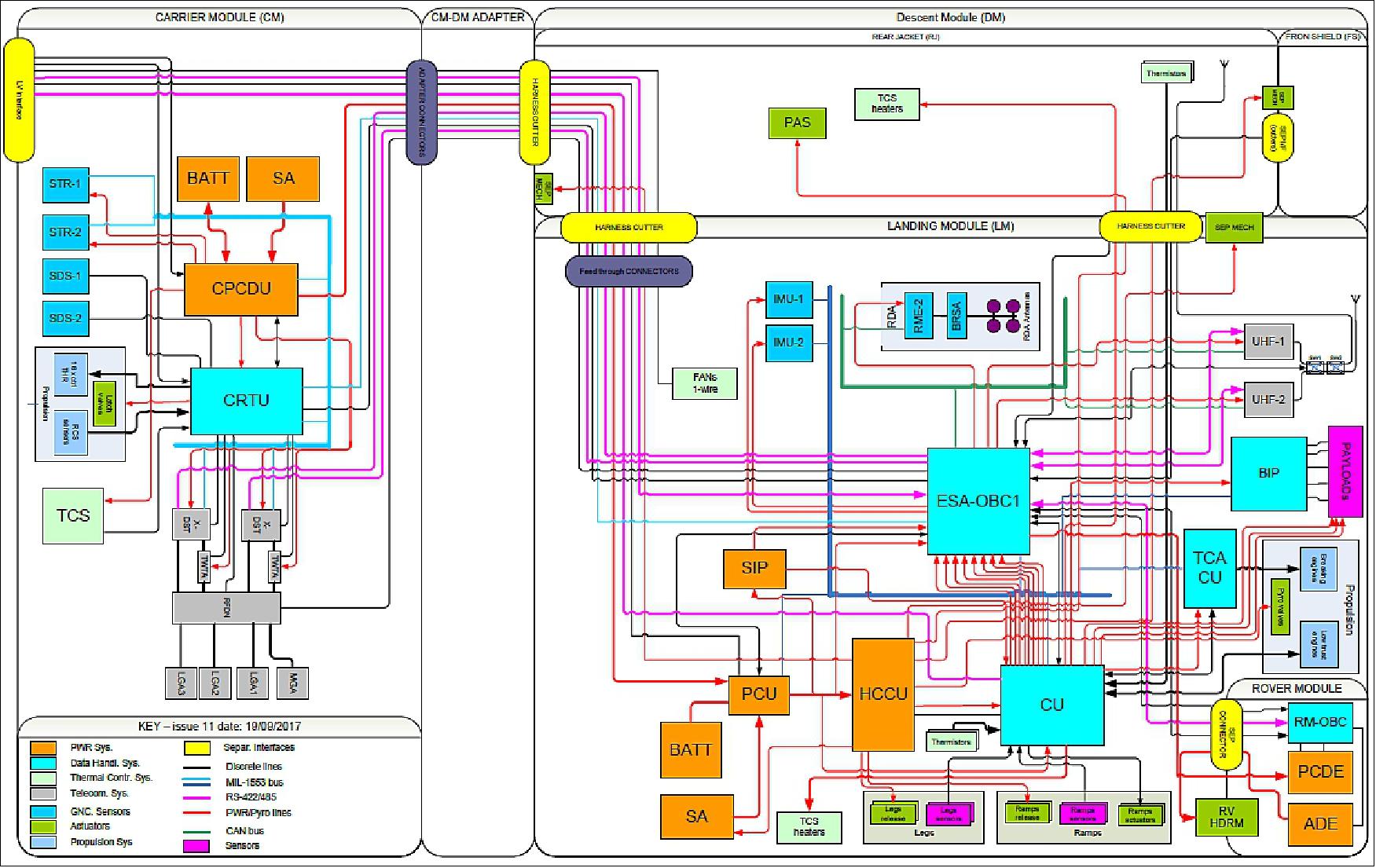
ExoMars RSP System Architecture
Hereafter, pictorial views of the main components of the ExoMars 2020 spacecraft together with the avionics block diagram are shown.
Note: As of March 2020, the European Space Agency (ESA) and the Roscosmos Space Corporation have decided to postpone the launch of the second ExoMars mission to study the Red Planet to 2022 (Ref. 31). The mission is now called ExoMars 2022.
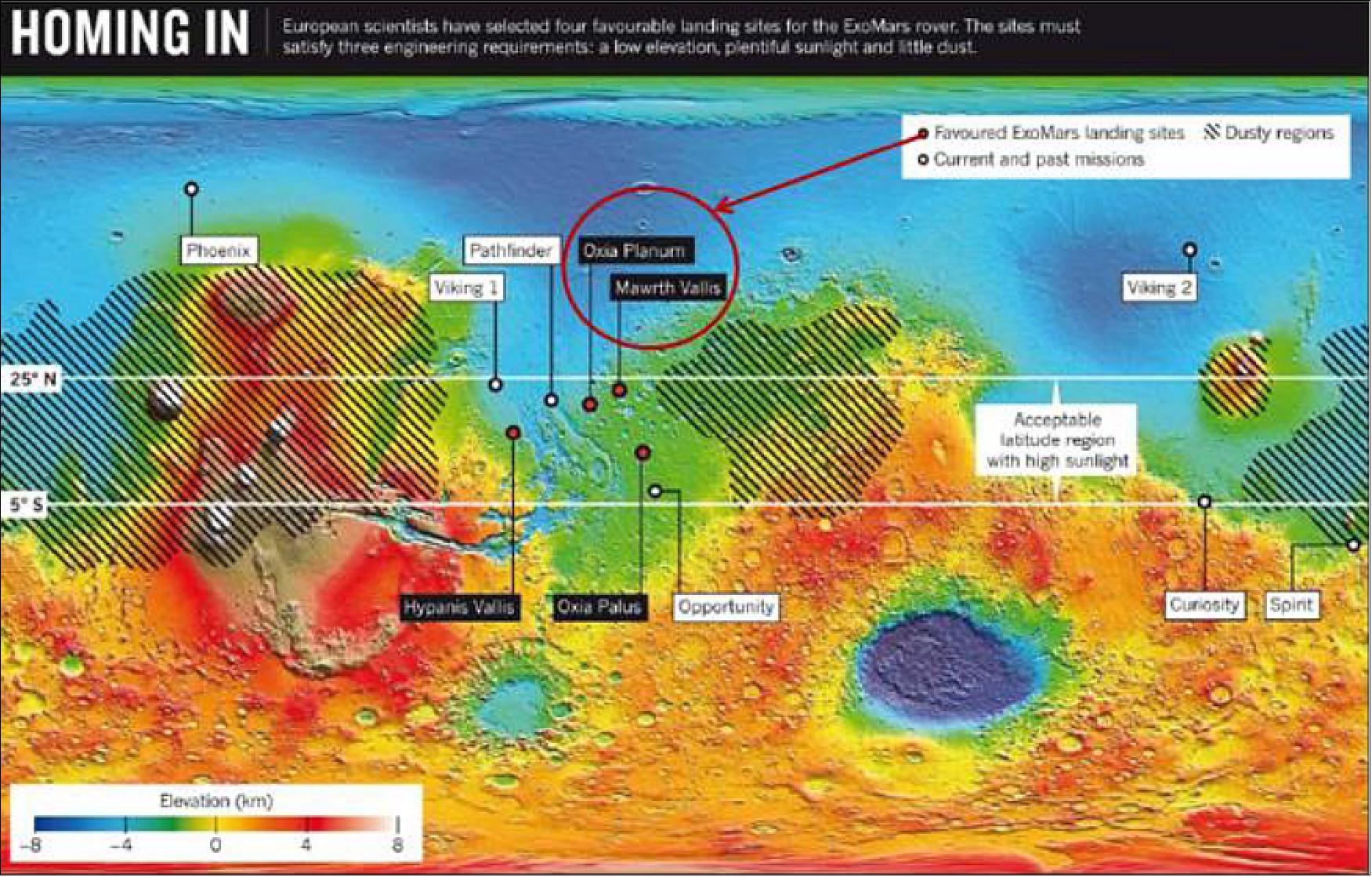
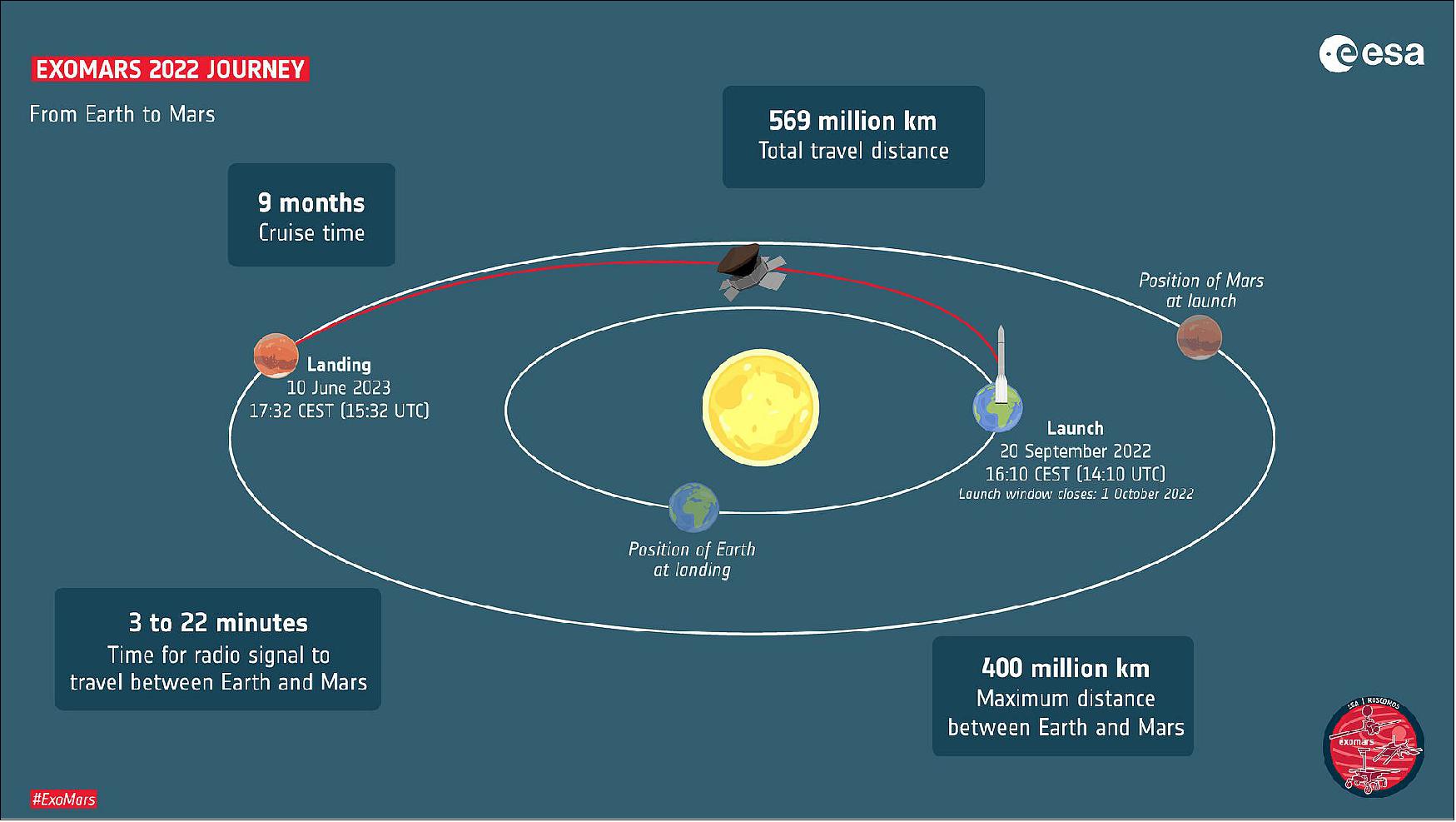
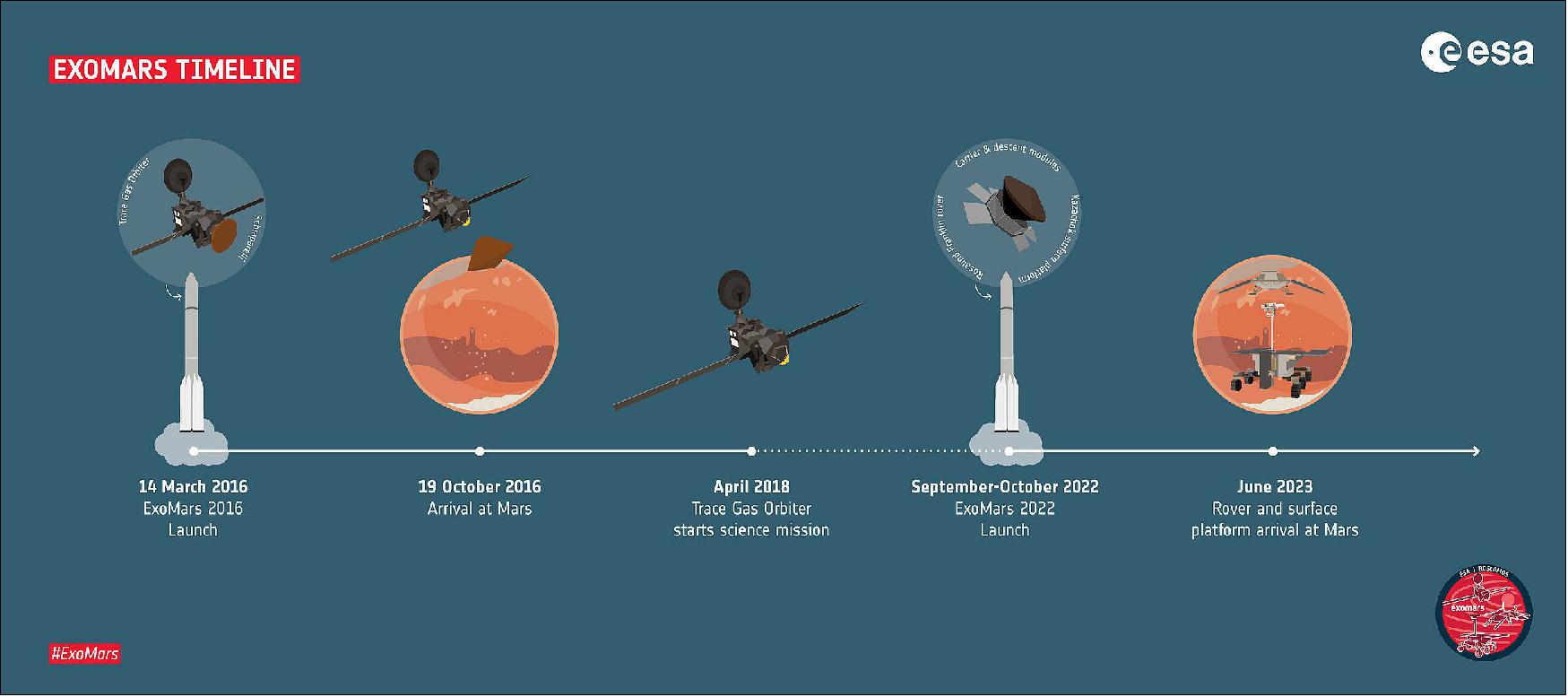
Launch: In 2020, the new launch date of the ExoMars 2022 mission was scheduled in the 20 September-1 October 2022 launch window on a Proton rocket with a Breeze-M upper stage of Roscosmos from the Baikonur Cosmodrome (Kazakhstan) and arrive in the Oxia Planum region of Mars on 10 June 2023. 10) However, due to disruption with virtually all Soyuz launch agreements internationally, the Proton rocket launch for the ExoMars mission in September 2022 will not proceed (Ref. 13).
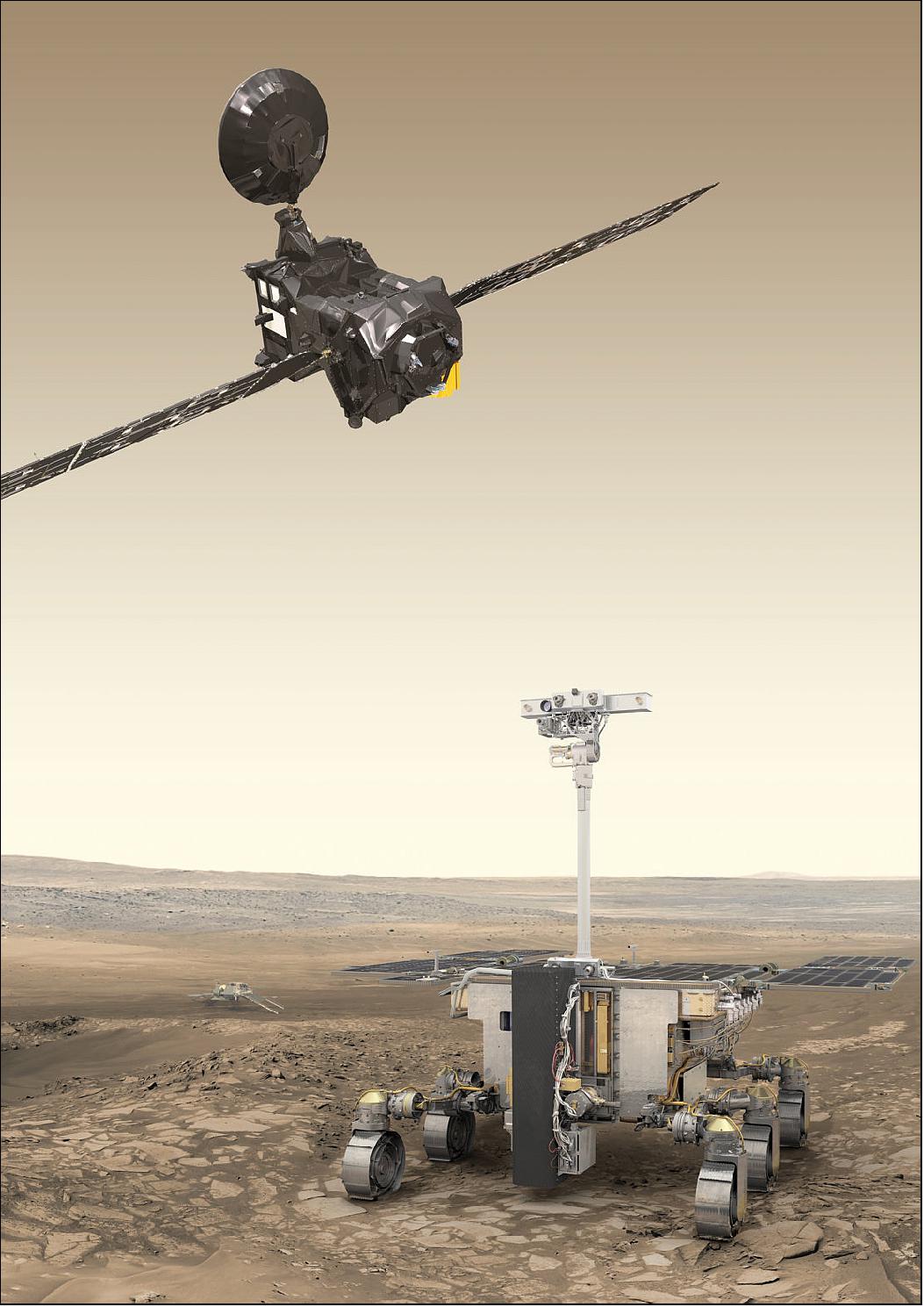
Rover ready – next steps for ExoMars
March 28, 2022: ESA’s ExoMars rover is confirmed technically ready for launch, and a fast-track study is under way to determine options for bringing the mission to Mars. 11)
The ESA-led Rosalind Franklin rover has a unique potential to search for evidence of past life on Mars thanks to its drill and laboratory. It will be the first rover to drill 2 m below the surface, and the first to use novel driving techniques, including wheel-walking, to overcome obstacles.
Although the 2022 launch window for the mission is no longer possible following the suspension of cooperation with Roscosmos, the mission’s System Qualification and Flight Acceptance Review took place as planned in March. The Review Board confirmed that the spacecraft would have been ready for the timely shipment to the launch site and the programme had a sufficient time margin for the original launch opportunity opening on 20 September 2022.
Due to the suspension of the 2022 launch, the ExoMars elements are now being prepared for storage at a Thales Alenia Space site in Italy awaiting further instruction.
The Review Board members specifically expressed their appreciation and thanks to the review team for the exhaustive work performed over the past months.
Based on the decision by ESA Member States at its March Council meeting, a fast-track industrial study will now start to better define the available options for a way forward to implement the ExoMars rover mission in a future launch.
The teams will be looking for the earliest possible launch depending on how quickly technologies can be developed to support a European-led mission, or in collaboration with other international partners, and the availability of compatible launchers and launch site.
“I hope that our Member States will decide that this is not the end of ExoMars, but rather a rebirth of the mission, perhaps serving as a trigger to develop more European autonomy,” says David Parker, Director of Human and Robotic Exploration at ESA.
“We count on brilliant teams and expertise across Europe and with international partners to reshape and rebuild the mission. The team is dedicated and focused on setting out the next steps to ensure we bring this incredible rover to Mars to complete the job it was designed for.”
Meanwhile, the ExoMars Trace Gas Orbiter (TGO) continues to relay the majority of data from Mars, from NASA’s Curiosity and Perseverance rovers as well as its Insight lander. TGO has considerable fuel onboard meaning it could also support data relay from the ExoMars rover in the future as well the Mars Sample Return campaign.
The ExoMars 2022 landing site is Oxia Planum, located in the northern hemisphere of Mars.
Development status of ExoMars 2022 - RSP (Rover and Surface Platform) Mission
Space Transportation
- Following the decision by Roscosmos to withdraw their personnel from Europe’s Spaceport in French Guiana, all missions scheduled for launch by Soyuz have been put on hold. These concern essentially four institutional missions for which ESA is the launch service procurement entity (Galileo M10, Galileo M11, Euclid and EarthCARE) and one additional institutional launch.
- Consequently, the ESA Director General has initiated an assessment on potential alternative launch services for these missions, which will include a review of the Ariane 6 first exploitation flights. A robust launch manifest for ESA missions’ launch needs, including for spacecraft originally planned for launch by Soyuz from Kourou, will be submitted to Member States.
The International Space Station
- The International Space Station Programme continues to operate nominally. The main goal is to continue safe operations of the ISS, including maintaining the safety of the crew.
Way forward
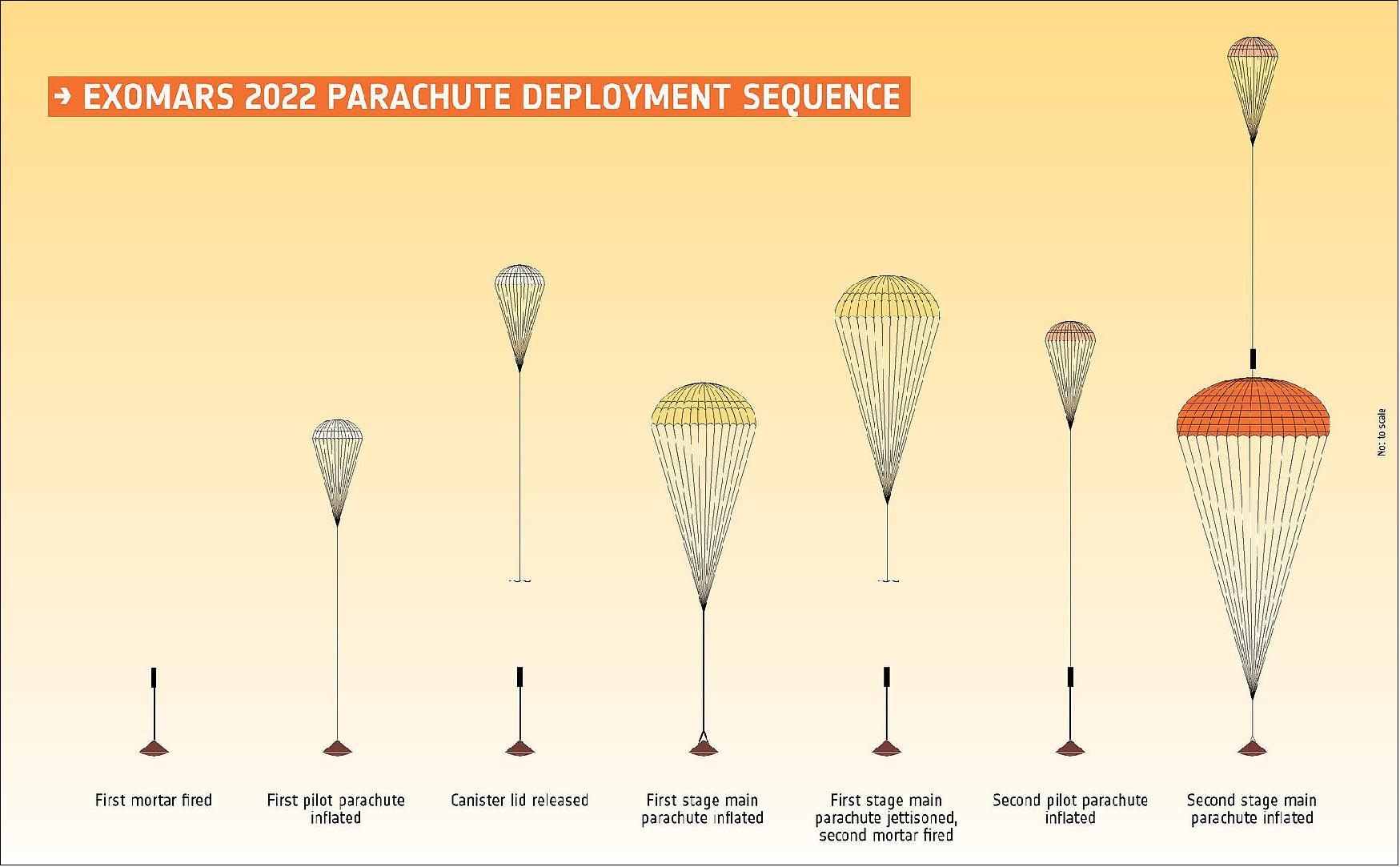
• December 14, 2021: The largest parachute set to fly on Mars has completed its first successful high-altitude drop test, a critical milestone for ensuring the ExoMars mission is on track for launch. Both the first and second stage parachutes have now successfully flown this year. 14)
- A pair of high-altitude drop tests took place in Oregon on 21 November and 3 December as part of the ongoing parachute testing to ensure the safe delivery of the ExoMars Rosalind Franklin rover and Kazachok lander to the surface of Mars in June 2023. The 35 m wide subsonic parachute – the largest ever to fly on Mars – was the focus of the latest campaign. One parachute was manufactured by European company Arescosmo, with the back-up provided by US-based Airborne Systems
- “Both parachutes deployed and flew beautifully,” says Thierry Blancquaert, ESA Exomars programme team leader. “We maximized the lessons learnt from all previous tests and with this double success following the impressive first stage parachute deployment earlier this year, we’re really on the road to launch. We have demonstrated we have two parachutes to fly to Mars.”
- The team will continue to test to verify the robustness of the final selection of parachutes, with more high altitude drop test opportunities possible in 2022 for both the first and second stage parachute. It is expected to fly the first stage parachute from Airborne Systems, and the second stage parachute by Arescosmo to Mars, pending the outcome of the March 2022 test campaign.
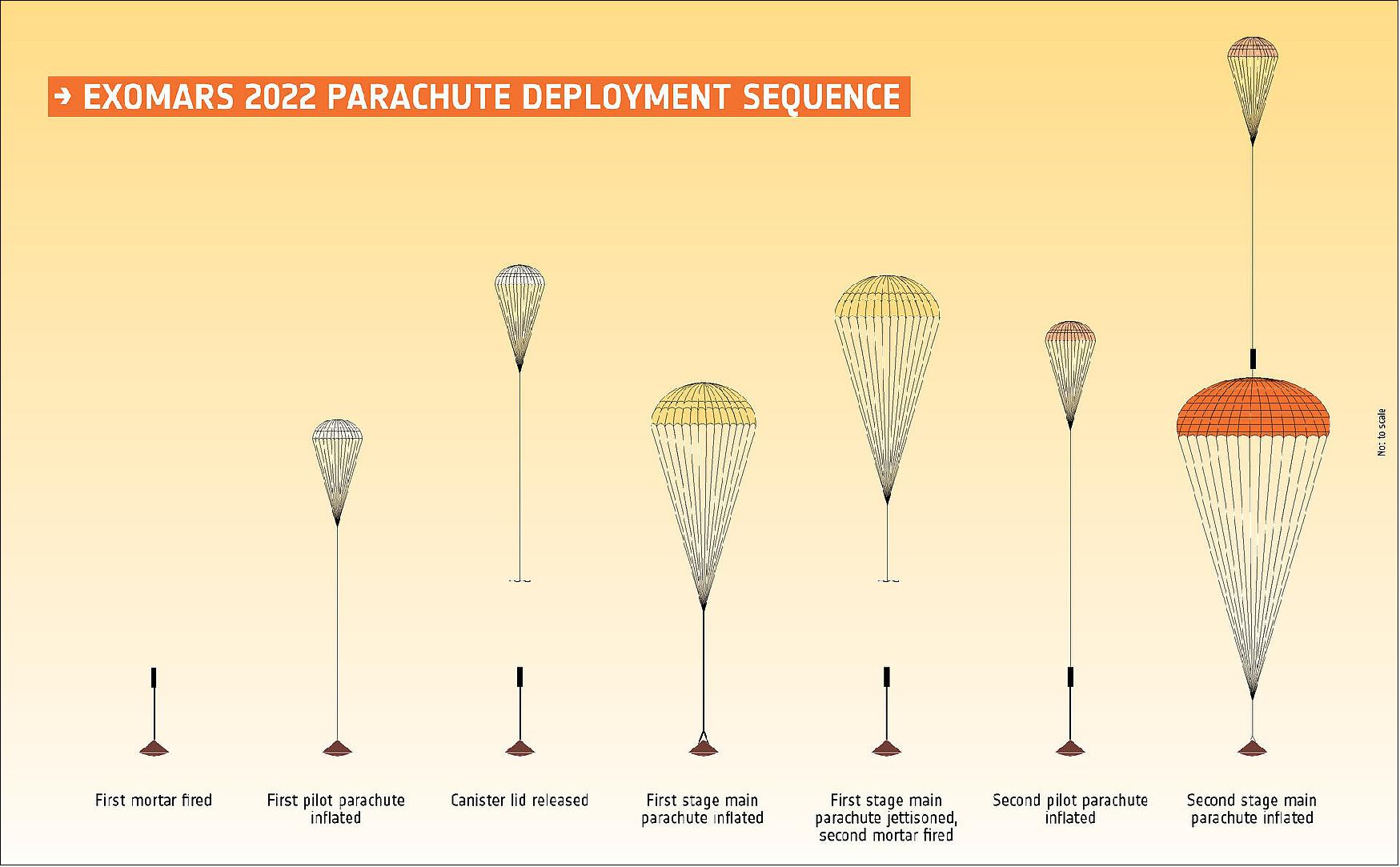
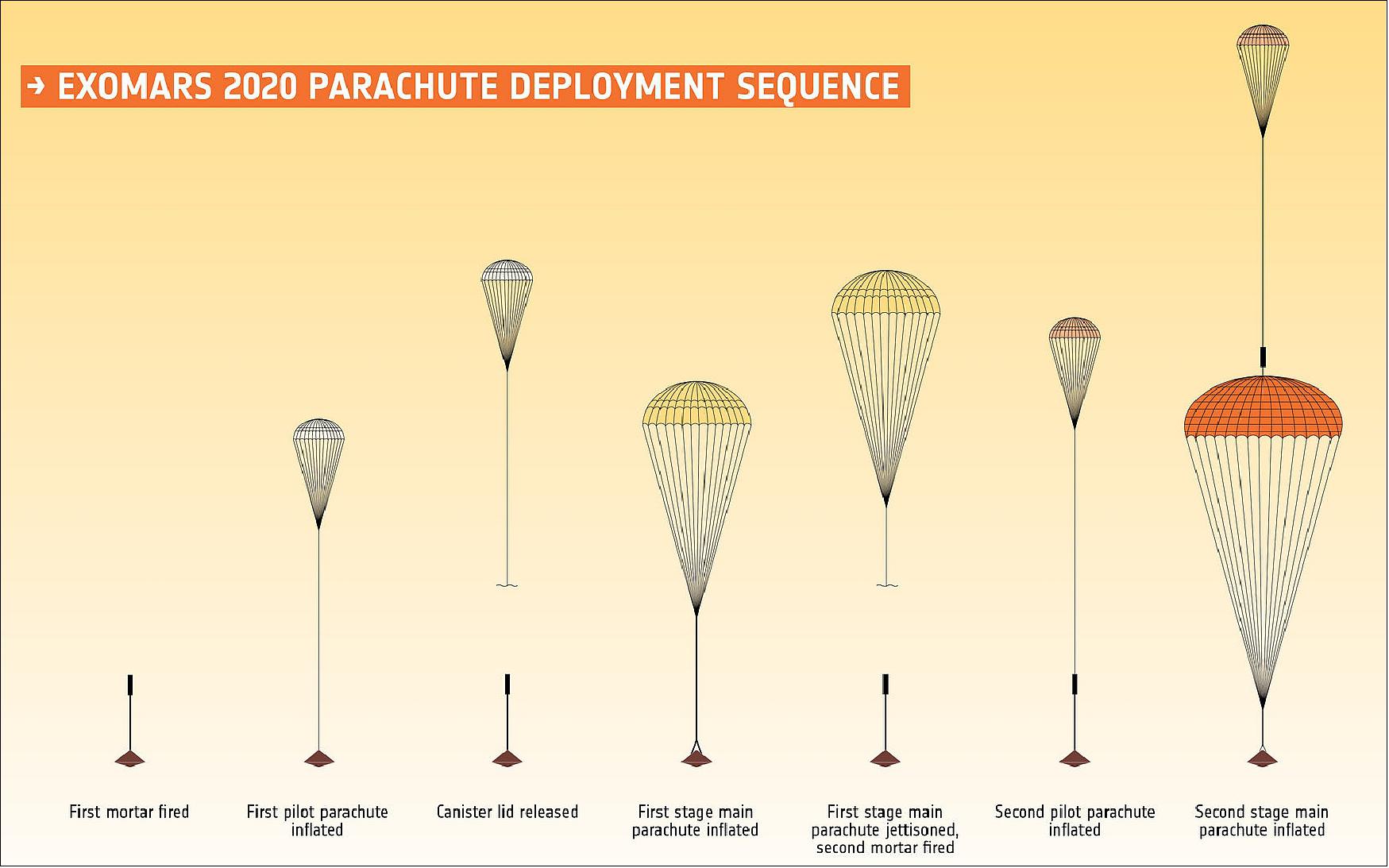
- After a nearly nine-month interplanetary cruise, a descent module containing the rover and platform will be released into the martian atmosphere at a speed of 21 000 km per hour. Slowing down requires a thermal shield, two main parachutes – each with its own pilot chute for extraction – and a retro rocket propulsion system triggered 30 seconds before touchdown. The 15 m-wide first stage main parachute opens while the descent module is still travelling at supersonic speeds, and the 35 m-wide second stage main parachute is deployed at subsonic speeds.
- Adjusting and testing the ExoMars parachutes has been a priority following a series of unsuccessful drop tests in 2019 and 2020. The first high altitude success took place in June 2021 with the flawless deployment of the first main parachute provided by Airborne Systems.
- In that set of tests, the 35 m-wide second stage parachute provided by Arescosmo experienced one minor damage, likely due to an unexpected detachment of the pilot chute during final inflation, but it still decelerated the drop test vehicle as expected. In the intervening months the pilot chute attachment was changed, and Kevlar reinforcements were replaced with nylon on two rings in the parachute canopy to better match the same strength and elasticity of the parachute fabric, in order to reduce the risk of tearing.
- Adjustments to the parachute system are first tested on the dynamic extraction test rig at NASA/JPL to check how the release of the parachute from the bag occurs, as it would happen in the martian atmosphere. These tests can be repeated on a quick turnaround and reduce the risk of anomalies.
- High-altitude drop tests require complex logistics and strict weather conditions, making them difficult to schedule, and are often aborted at the last moment if the situation changes. The wind speed and direction at various altitudes has to be considered for a smooth ascent of the balloon and the on-ground recovery of the hardware given that the drop zone can only be accessed via helicopter, and must not fall over populated areas. There must also be no rain, clouds or fog, and the humidity must be such that condensation does not accumulate on the huge envelope of the 335 000 m3 balloon as this would cause a large quantity of water to fall on the drop test vehicle and its electronics.
- Once these requirements have been met and the green light given to inflate and launch the helium-filled stratospheric balloon, the drop test vehicle is lofted to an altitude of 29 km. Following release from the balloon, the pilot chute deployment is initiated, which in turn pulls the main parachute from its doughnut bag.
- “Everyone working on this campaign – both on site and off – had to wait a long time in this launch window for the right weather conditions, but we are delighted with the outcome,” says Thierry. “After recovering the parachutes we observed only a handful of very tiny and insignificant 1-2 cm sized tears and friction searing on the two parachute canopies. We can certainly fly as-is without any concern, but adjustments are still possible, and we will carefully scrutinize the results of the next tests early next year.”
- The parachutes are just one element of this complex mission, which, after launch, will see a carrier module transport the rover and surface platform to Mars inside a descent module. Significant progress has been made across many areas of the mission in the last months, as the functional testing phase draws to a close and attention shifts to the launch campaign in Baikonur.

- “Thanks to the incredible efforts of all our partners, we are wrapping up loose ends in this highly complex mission to ensure we have a robust mission to fly to Mars,” adds Thierry. “In parallel, launch campaign preparations are proceeding at full steam and we’re looking forward to ship the spacecraft modules and ground support equipment to Baikonur in late March and early April. An exciting year is to come.”
- All parachute system qualification activities are managed and conducted by a joint team involving the ESA project (supported by the Directorate of Technology, Engineering and Quality), Thales Alenia Space Italy (ExoMars prime contractor, in Turin), Thales Alenia Space France (parachute system lead, in Cannes), Vorticity in the UK (Parachute design and test analysis, in Oxford) and Arescosmo in Italy (parachute and bags manufacturing, in Aprilia). NASA/JPL-Caltech has provided engineering consultancy, access to the dynamic extraction test facility, and on-site support during these tests. The extraction tests are supported through an engineering support contract with Airborne Systems, who also provided NASA’s Mars 2020 parachutes, and by Free Flight Enterprises for the provision of parachute folding and packing facilities. Airborne Systems is also providing parachute design and manufacturing services since 2021.
- Near Space Corporation provide the balloon launch services in Oregon. The Swedish Space Corporation Esrange facility provides the balloon launch services in Kiruna.
• December 3, 2021: The ExoMars rover used in the Earth-based Mars Terrain Simulator makes escaping from a sand trap look easy in this exercise. 15)
- The rover initially has its front two wheels almost completely buried in sand, but easily escapes using its unique wheel-walking mode.
- Rovers on Mars have previously been caught in sand, and turning the wheels dug them deeper, just like a car stuck in mud or snow. To avoid this, the ExoMars rover Rosalind Franklin – and its replica – has a unique wheel walking locomotion mode. Similar to leg movements, wheel-walking combines motions of the deployment actuators (the legs) with the rotation of the wheels to progress without slippage. This motion gives very good traction in soft soils and high slopes, such as dunes.
- “We hope to never need to use wheel walking on Mars to escape dangerous sand traps, but we are glad to have such functionality to potentially safeguard the mission,” comments Luc Joudrier, ESA ExoMars Rover Operations Manager. “From a rover operational point of view, this is really our insurance again difficult terrains.”
- In the test run seen here, the back wheels drag once the front four wheels have gained good traction on firmer terrain. The reason is that the wheel-walking sequence tested here has rather been optimized for climbing steep slopes with loose soils. In this sequence of commands, a short rotation of the wheel follows each movement of the legs. This is to anchor the wheels, digging them a little bit into the soil, before moving the rest – like when you climb a slope with snow and firm up each step before making a new one. On firmer soils, the anchoring rotation is not as effective (it can create the dragging effect) and therefore can be excluded from the command sequence.
- The activity took place in the Mars Terrain Simulator at the Rover Operations Control Centre at the ALTEC premises, at Thales Alenia Space facilities in Turin, Italy in November 2021. It is from here that rover science operations will take place once Rosalind Franklin lands on Mars in June 2023. In the meantime, the facility is being used for training rover operators and simulating science operations that will be expected in the main mission.
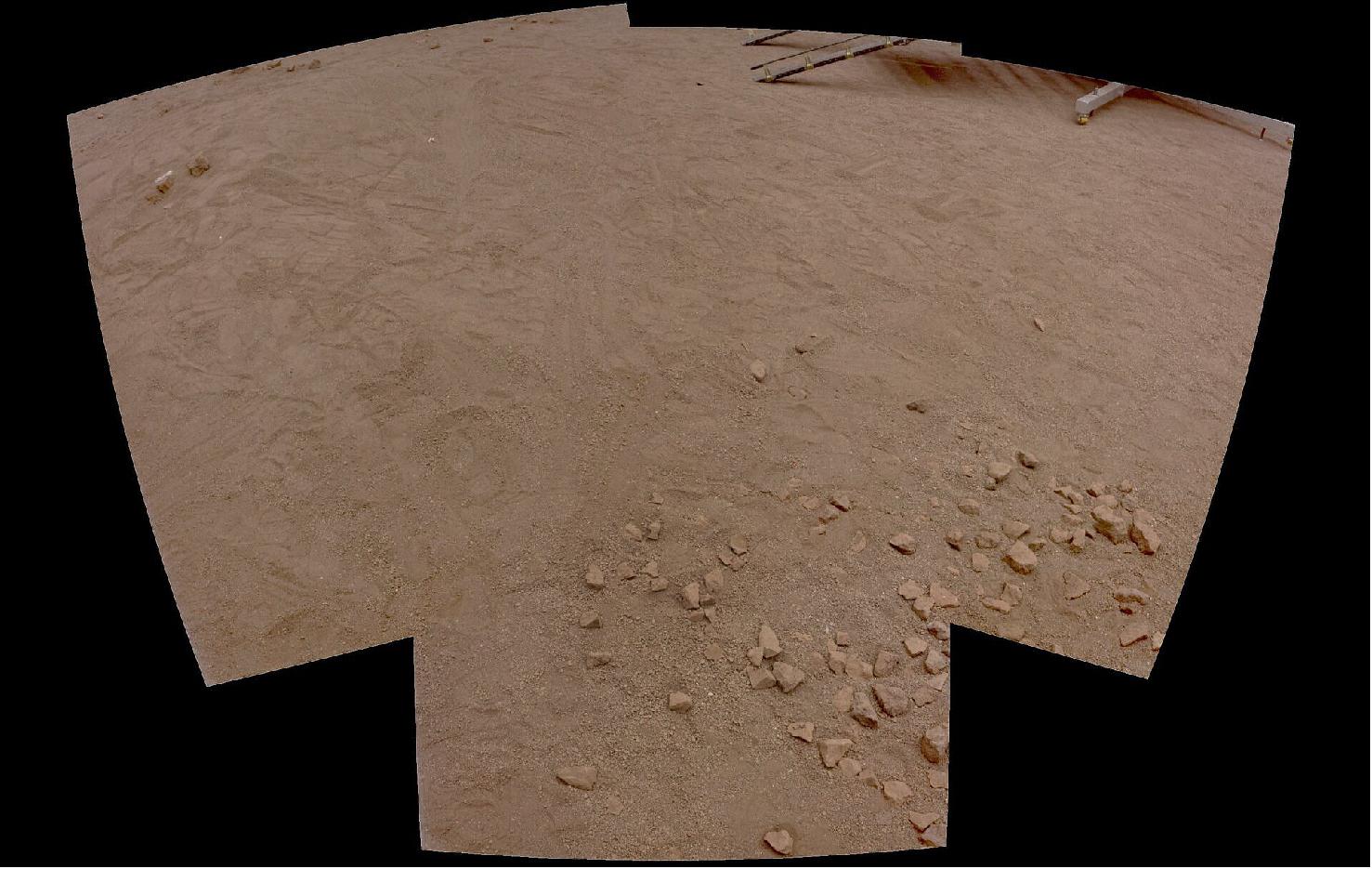
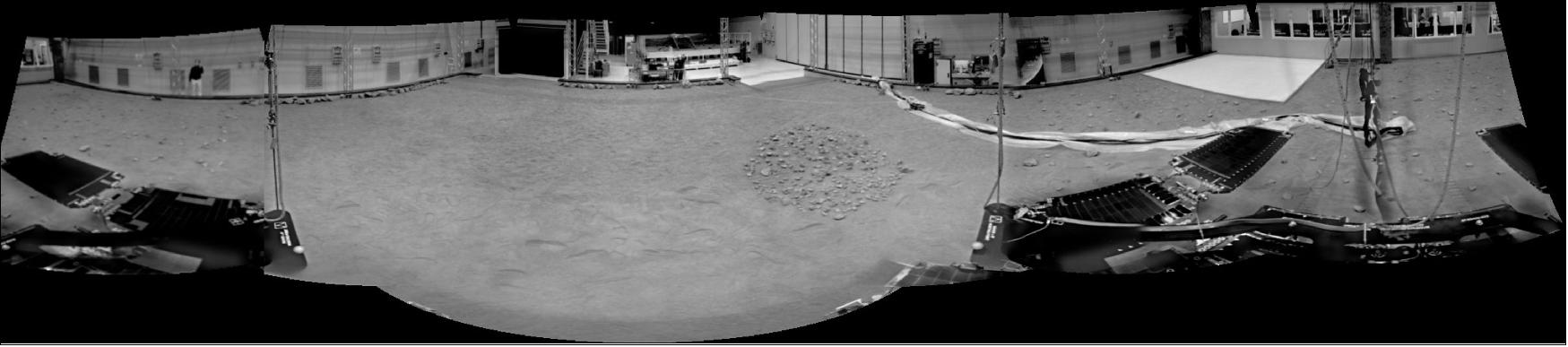
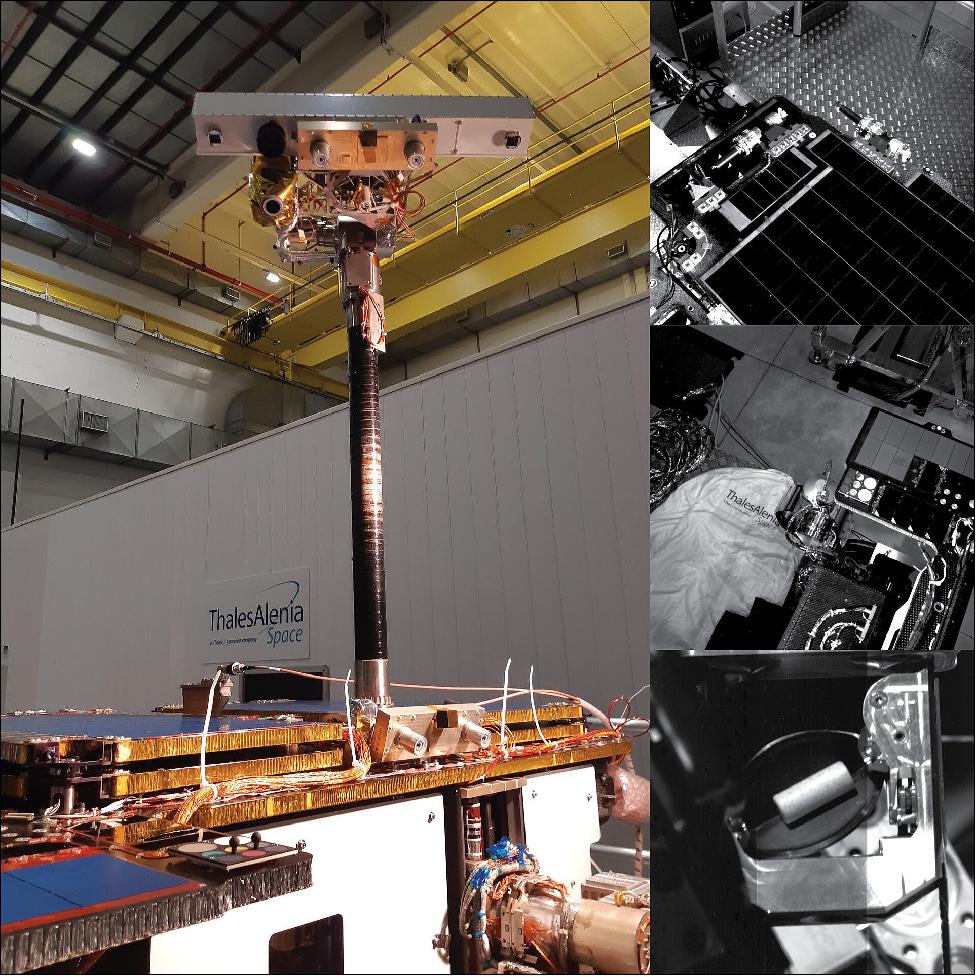
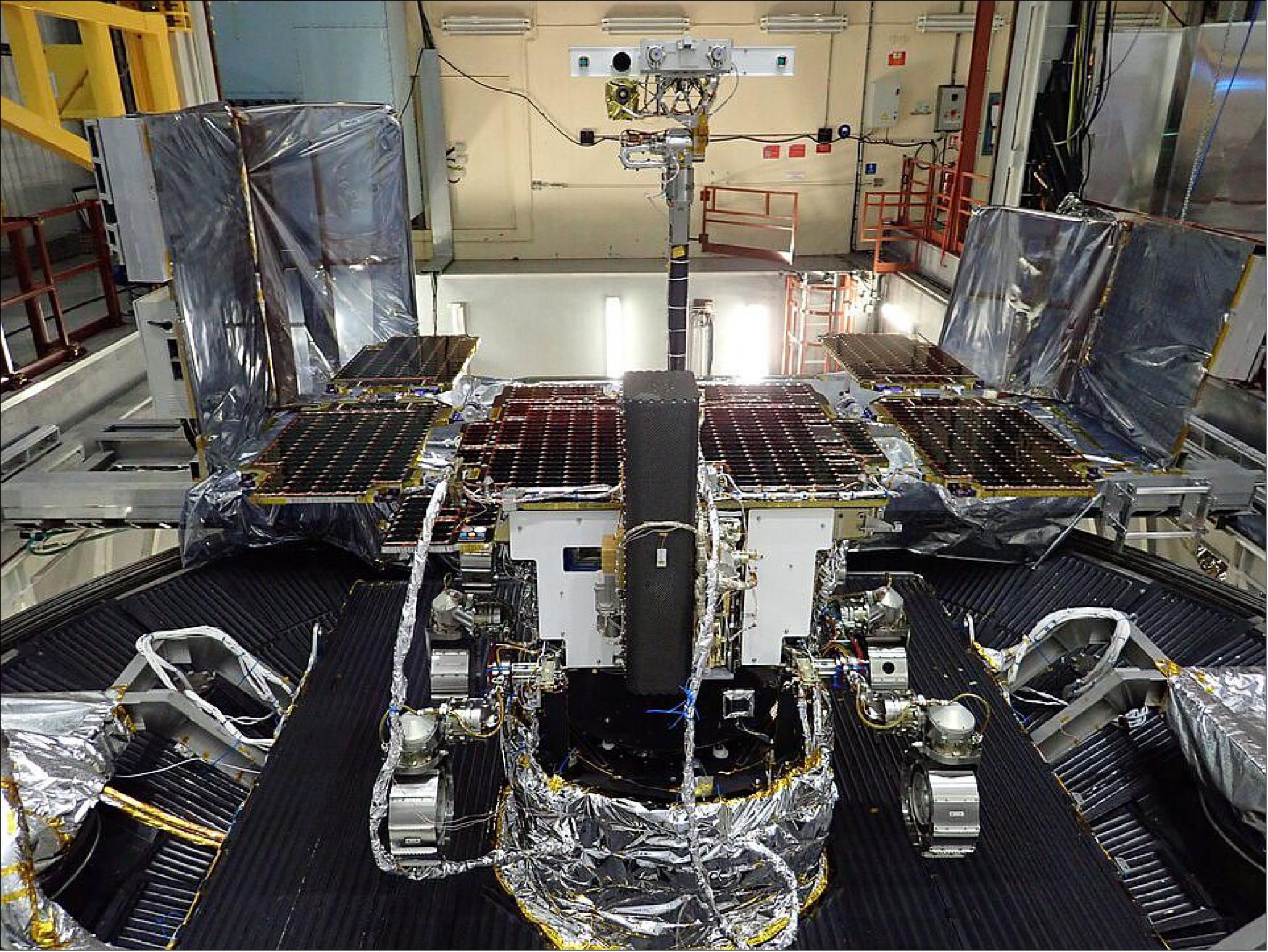
• November 4, 2021: From panoramas to close-ups, from 3D maps to a wheel selfie, the Earth-bound twin of ESA’s Rosalind Franklin rover is testing the wide range of photo settings that will deliver the greatest science possible during the ExoMars mission on the Red Planet. 16)
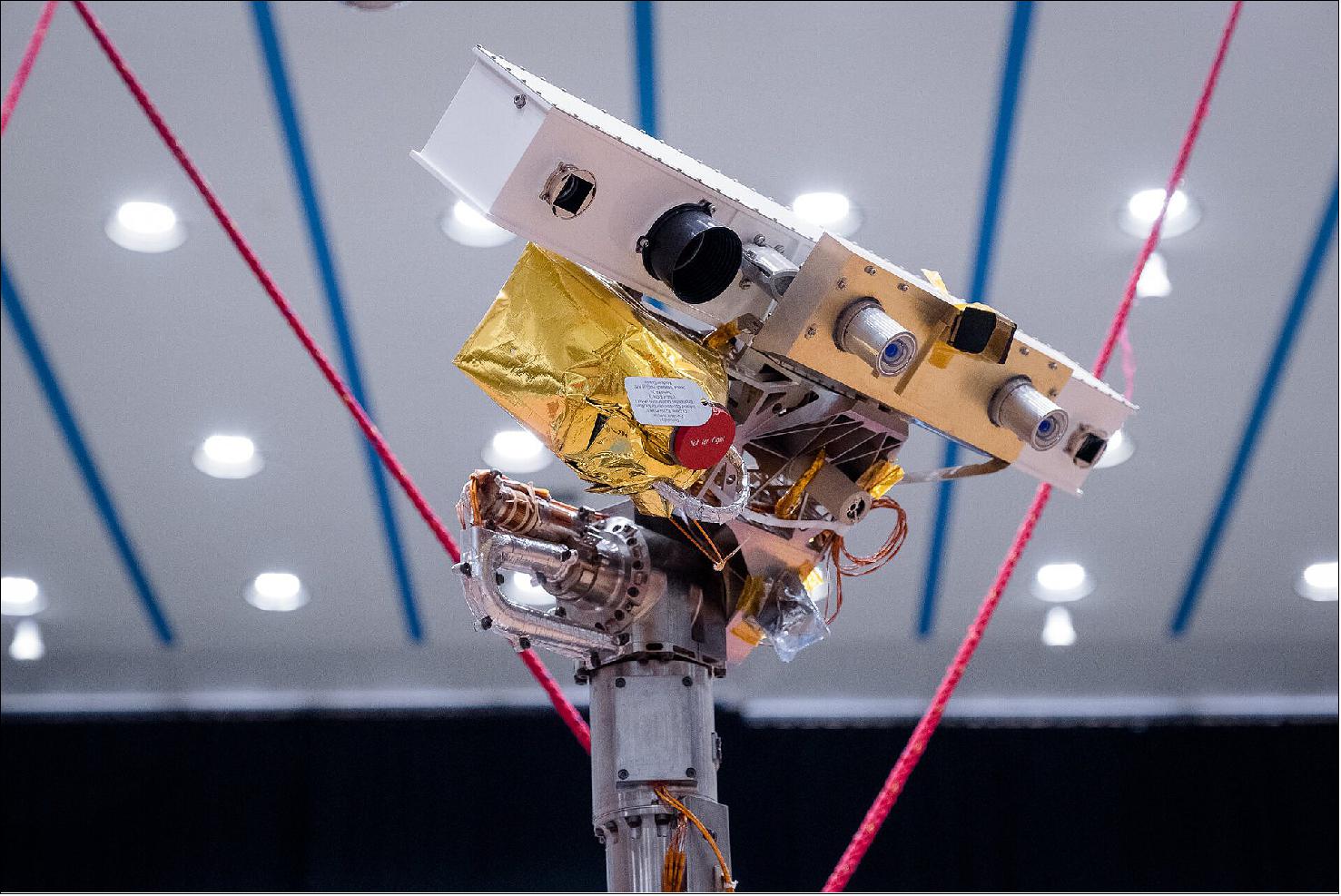
- The scientific eyes of the rover are set on the Panoramic Camera suite known as PanCam. The replica atop the mast of the Ground Test Model rover is achieving a level of detail similar to what is expected from Rosalind Franklin in 2023.
- The target over the last few months has been the reddish and grainy, sometimes rocky surface of the Mars Terrain Simulator at the ALTEC premises in Turin, Italy.
- “Since we will be looking for water and life on Mars, testing Rosalind Franklin’s main cameras is particularly important in the search for water-rich minerals,” explains Andrew Coates, PanCam principal investigator and Professor at the UCL Mullard Space Science Laboratory in the UK.
Science on Top
- Engineers have packed as much science as they could into the camera system.
- The two wide-angle cameras (WACs) are set 50 cm apart and form a stereo pair that images what is in front of the rover from a vantage point about two meters above the ground. Scientists create 3D pictures and depth maps by overlaying simultaneous snapshots.
- “Besides plotting routes where the rover can go, these cameras help us do geology and atmospheric science,” says Andrew.
- The High Resolution Camera (HRC) has eight times the resolution of the wide-angle cameras to closely examine rock texture and grain size in color.
- This powerful camera “will help us investigate very fine details in outcrops, rocks and soils, find the most promising spots to drill, and take images of the samples before they are sent to the rover’s laboratory,” says Nicole Schmitz, PanCam co-principal investigator responsible for the high-resolution camera at the DLR Institute of Planetary Research, Germany.

- Mounted below is the infrared spectrometer (ISEM) that analyses the geochemistry of the rocks. HRC and ISEM are a well-matched couple. They are co-aligned, so that scientists can see in the HRC images where ISEM took its measurements.
Rainbow Eyes
- Humans and smartphones can only see colors in visible light. PanCam can ‘see’ in 19 colors, in the visible and near infrared wavelengths.
- Each of the wide-angle cameras has a filter wheel with 11 positions to look at the colors of the rocks and the martian sky.
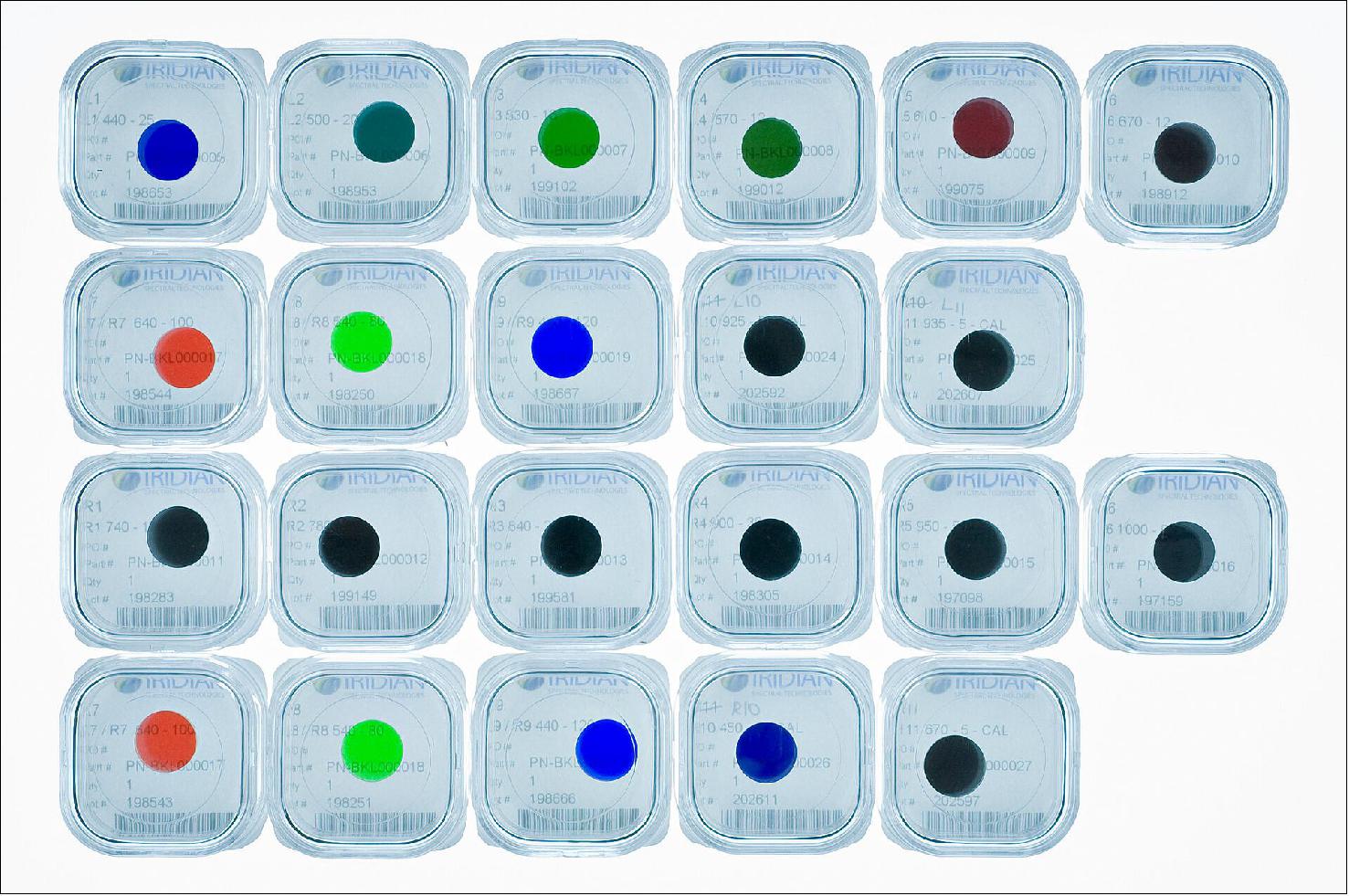
- This special carousel will allow the rover to stare at the Sun, find the amount of dust in the atmosphere and measure the water vapor content during sunsets on Mars.
- A calibration target mounted on the rover’s solar array top deck, comprising a palette of stained glass similar to that of church windows, will help PanCam get its colors right.

Mars-proof
- PanCam can withstand much harsher conditions than smartphone cameras on Earth. The hardware can cope with extreme temperatures, from zero degrees during the day down to –120 º Celsius during the cold martian nights. The sensors are also resistant to the high radiation environment during the journey to Mars and on the surface of the planet.
- “It was challenging to build a robust enough camera with adjustable focus to take high resolution images of very close and far away targets,” says Nicole.

- Rosalind Franklin can also take a look at herself – a small spherical mirror close to one of the rover’s wheels can be used to get a view underneath the rover. The Rover Inspection Mirror, mounted near a rover wheel, will enable PanCam to capture images from underneath the rover.
- There is yet another camera which will come in to play for martian shots in upcoming tests. The Close-Up Imager, CLUPI, will provide detailed views of the soil that is churned out by the drilling action. When the drill is in ‘stowed’ position this camera can also take photos of the landscape to the side of the rover.
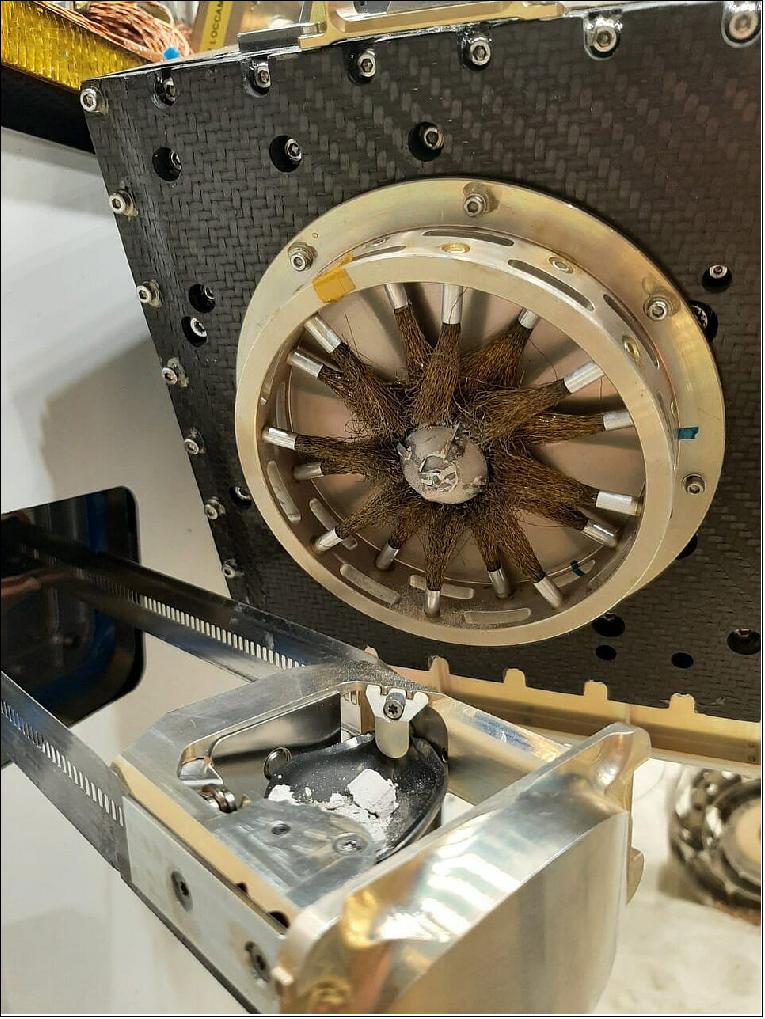
• October 29, 2021: The Rosalind Franklin rover that will search for life on Mars has completed an important bakeout to help clean the rover from organic molecules from Earth. 17)
- An additional analysis following the bakeout will be completed at a later date. That is, the rover’s Mars Organics Molecule Analyzer (MOMA), one of the instruments inside the rover’s analytical laboratory ultra-clean zone that will be used to determine if signs of life are present in the martian soil, will determine the chemical background in the rover’s laboratory by performing a measurement using an empty oven. Once on Mars, MOMA’s tiny ovens will host crushed soil samples that will be heated to allow the resulting vapor and gases to be analyzed with gas chromatography techniques to sniff out traces of organic compounds. The ‘sniff’ of the empty oven following the Earth-based bakeout will establish the background footprint against which future measurements on Mars can be compared.
- The rover is equipped with a unique drill that will bore down to 2 m below the martian surface and return samples for analysis. In the video, the rover is seen with its drill box in horizontal stowed position at the front. The drill tool also hosts a miniaturized spectrometer (Ma_MISS) to analyze the inner surface of the borehole, and a close-up imager (CLUPI) that will look at the drill fines and core sample before it enters the rover’s laboratory.
- Different instruments will work together to analyze the samples inside the rover. In addition to MOMA, the MicrOmega instrument will use visible and infrared light to characterize minerals in the samples, and a Raman spectrometer will use a laser to identify mineralogical composition.
- Using its panoramic and high resolution cameras and ground-penetrating radar, the ExoMars rover will seek out the most promising locations to drill, and to better understand the geological context of the Oxia Planum region that it will explore.
- Following completion of the bakeout, the thermo-vacuum chamber was re-pressurized and opened, and the rover prepared for its return journey to Thales Alenia Space in Turin. There, readiness for launch will continue until it ships to the launch site next year.
- Parts of the video are shown as timelapse.
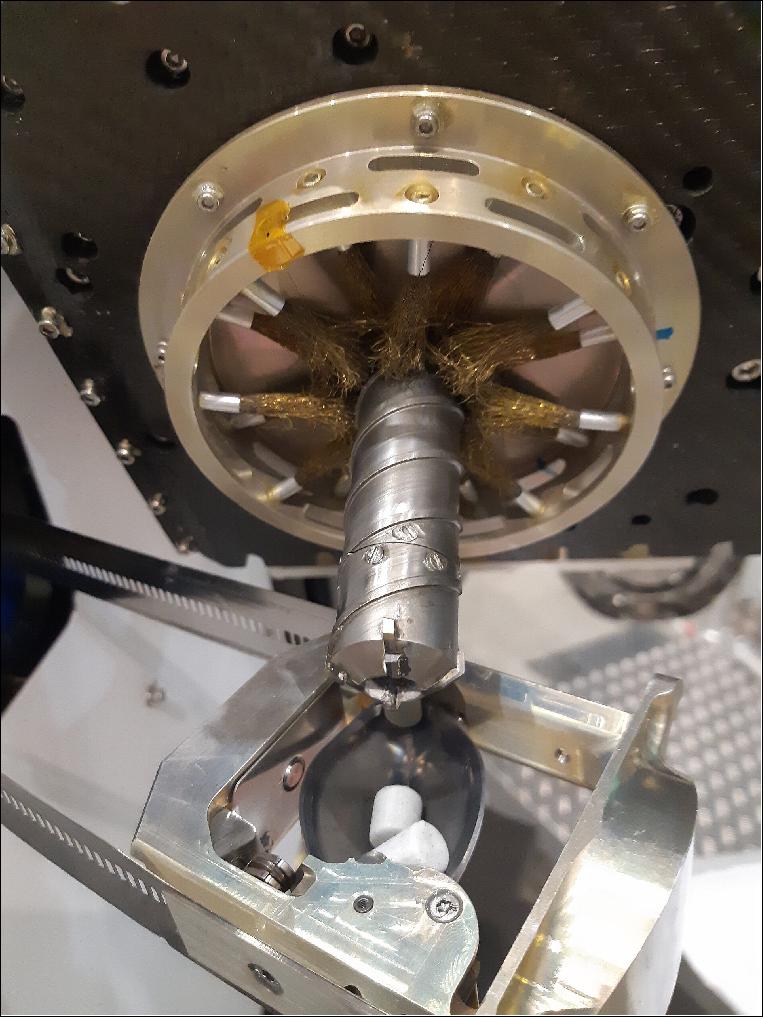
• September 15, 2021: ESA’s Rosalind Franklin twin rover on Earth has drilled down and extracted samples 1.7 meters into the ground – much deeper than any other martian rover has ever attempted. 18)
- The successful collection of soil from a hard stone and its delivery to the laboratory inside the rover marks a promising milestone for the ExoMars 2022 mission.
- “The long-awaited success of the ExoMars drill on Earth would be a first in Mars exploration,” says David Parker, ESA’s director of human and robotic exploration. The deepest any drill has dug on the Red Planet to date is 7 cm.
- The Rosalind Franklin rover is designed to drill deep enough, up to two meters, to get access to well-preserved organic material from four billion years ago, when conditions on the surface of Mars were more like those on infant Earth.
Drill Operations
- Rosalind Franklin’s twin has been drilling into a well filled with a variety of rocks and soil layers. The first sample was taken from a block of cemented clay of medium hardness.
- Drilling took place on a dedicated platform tilted at seven degrees to simulate the collection of a sample in a non-vertical position. The drill acquired the sample in the shape of a pellet of about 1 cm in diameter and 2 cm long.
- Rosalind Franklin’s drill retains the sample with a shutter that prevents it from dropping out during retrieval. Once captured, the drill brings the sample to the surface and delivers it to the laboratory inside the rover.
- With the drill completely retracted, the rock is dropped into a drawer at the front of the rover, which then withdraws and deposits the sample into a crushing station. The resulting powder is distributed to ovens and containers designed to perform the scientific analysis on Mars.
- “The reliable acquisition of deep samples is key for ExoMars’ main science objective: to investigate the chemical composition —and possible signs of life— of soil that has not been subjected to damaging ionizing radiation,” says ExoMars project scientist Jorge Vago.
A Unique Drill for Mars
- The ExoMars drill is an assembly of mechanisms that rely on an automated choreography of tools and mounting rods. “The design and construction of the drill has been so complex that this first deep drilling is an extraordinary achievement for the team,” says Pietro Baglioni, ExoMars rover team leader.
- Rosalind Franklin’s drill works on rotation. A series of tools and extension rods are fitted to form a ‘drill string’ and can reach the full 2 m length when all are connected.
- The drill can penetrate the ground at 60 rotations per minute, depending on the consistency of the soil. Digging into sandy or clay solid materials could take between 0.3 and 30 mm per minute.
- The drill has also a two-degree of freedom positioner that allows it to discharge the sample at the right angle into the rover laboratory.
• September 3, 2021: The ExoMars team have performed important parachute drop tests as crucial preparation for a safe touchdown on Mars in 2023. The European Rosalind Franklin rover will search for signs of past life beneath the surface of Mars with its unique two meter drill and onboard laboratory. The Russian surface science platform Kazachok will study the environment at the landing site. Landing on Mars is always a challenging endeavor and all possible parameters are taken into account. 19)
• July 2, 2021: After several weeks of bad weather and strong winds, the latest pair of high-altitude drop tests of the ExoMars parachutes took place in Kiruna, Sweden. 20)
- Each high altitude drop test saw a dummy descent module lofted to an altitude of 29 km by a stratospheric balloon inflated with helium. Following release, the pilot chute extraction initiates with a controlled extraction of the main parachute from the doughnut bag.
- The first test focused on validating the Airborne Systems backup supersonic parachute – the first drop test for this parachute in this ExoMars test campaign.
- These tests took place after several weeks of bad weather in Kiruna, and follow the high-altitude drop tests in 2019, during which critical damage to both parachute canopies was observed.
- After a nine-month interplanetary cruise, a descent module containing the rover and platform will be released into the martian atmosphere at a speed of 21,000 km/hr.
- Slowing down requires a thermal shield, two main parachutes – each with its own pilot chute for extraction – and a retro rocket propulsion system triggered 20 seconds before touchdown. The 15 m-wide first stage main parachute opens while the descent module is still travelling at supersonic speeds, and the 35 m-wide second stage main parachute is deployed at subsonic speeds.
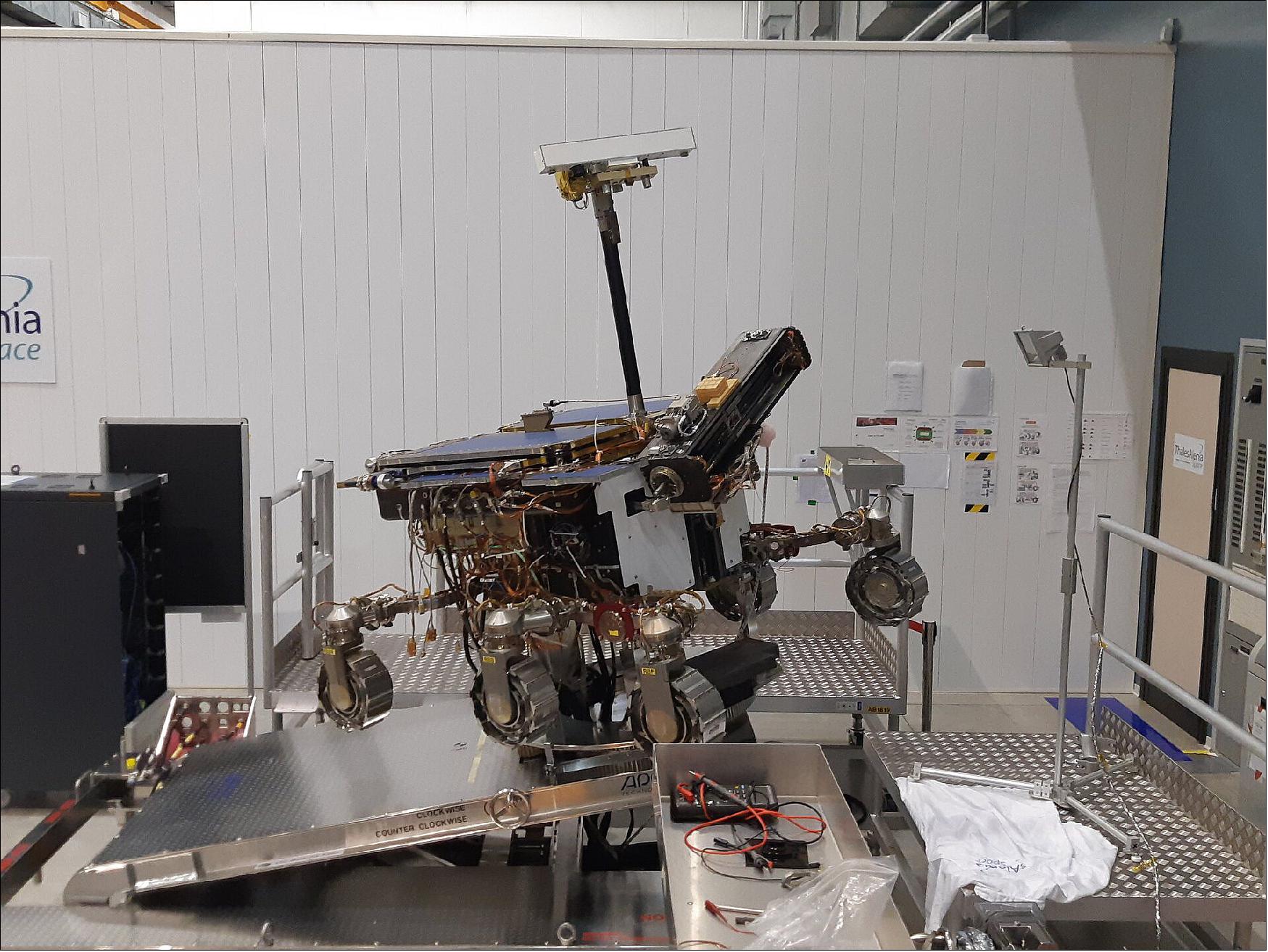
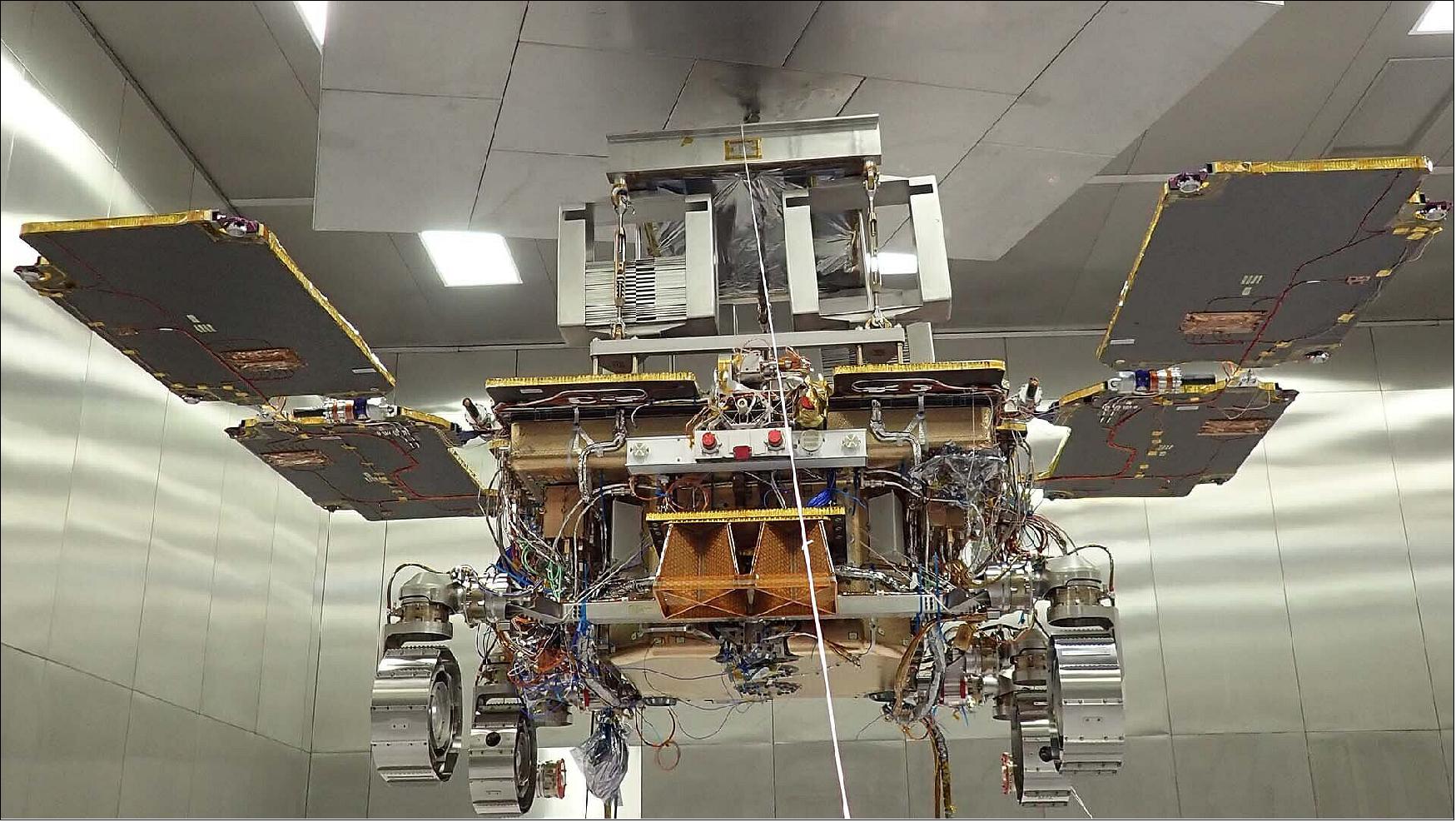
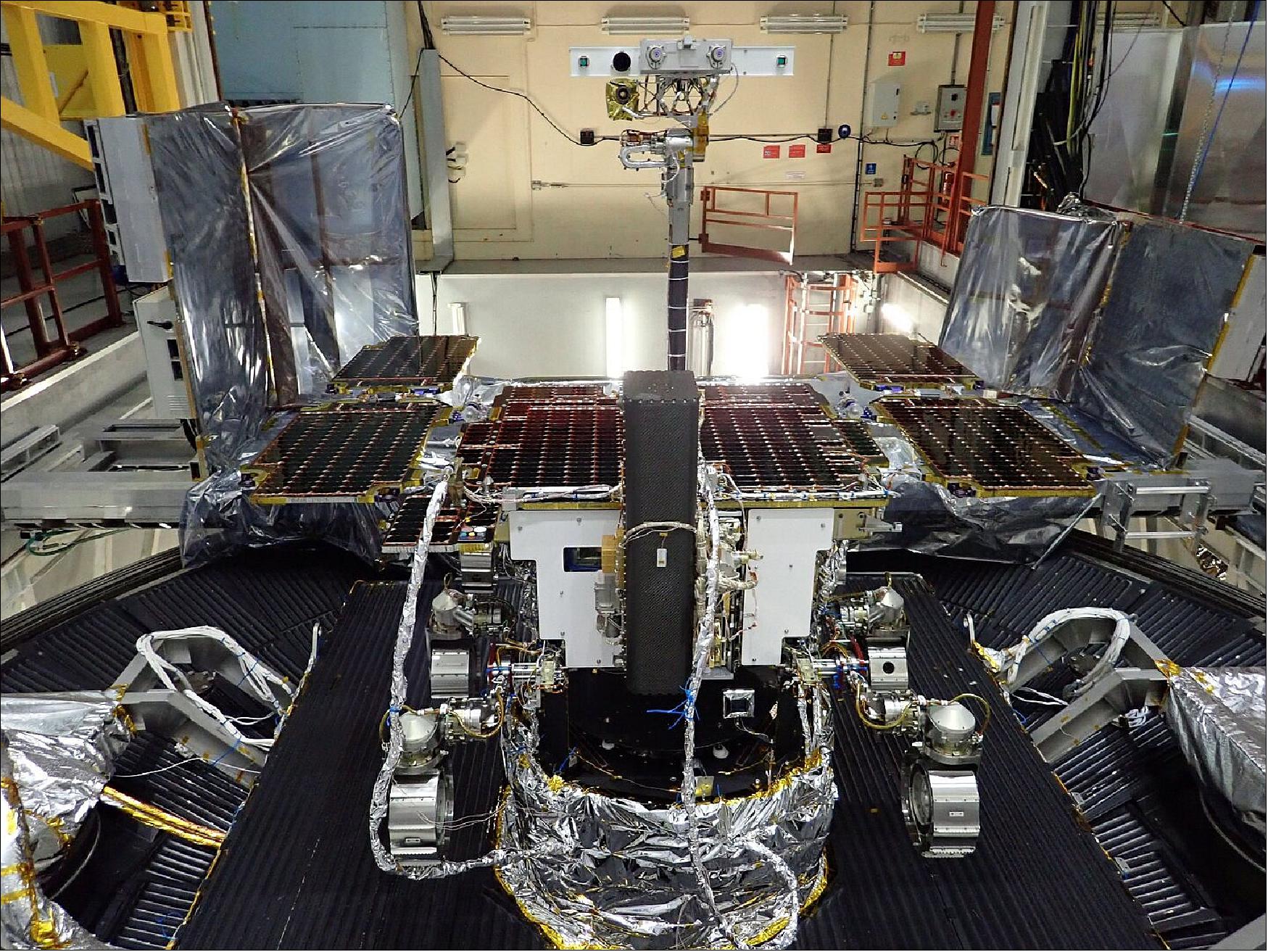
• June 4, 2021: The replica ExoMars rover that will be used in the ROCC (Rover Operations Control Centre) to support mission training and operations is fully assembled and has completed its first drive around the Mars Terrain Simulator at ALTEC, in Turin, Italy. 21)
- The rover ‘Ground Test Model’ (GTM) will play a critical role in the coming months as rover operators prepare for Rosalind Franklin’s arrival in Oxia Planum on Mars in June 2023.
- The GTM already completed important commanding tests while stationary in the Thales Alenia Space cleanroom, and now it has been fully assembled in the Mars Terrain Simulator.
- To best represent what the real Rosalind Franklin rover will experience on Mars, the GTM is supported by a device to recreate the martian gravity level. Mars gravity is about one-third of Earth’s so two-thirds of the rover’s 290 kg total mass is absorbed by the ‘Rover Unloading Device’ attached to the GTM from the ceiling of the test area.

- Rover operators will rehearse numerous activities with the replica rover, from moving across different terrain to deploying its science instruments.
- The first tests were simple driving activities: moving over different surfaces, tackling a side slope, small hill, and boulder-strewn terrain. On top of the hill, the rover was also commanded to take a panoramic image sequence.
- The test paves the way for more advanced activities in the coming months. For example, while the first driving test was executed by following direct drive commands, upcoming is a trajectory control test: that is, the rover will automatically correct deviations induced by the topography and roughness of the terrain to stay within 20 cm of the commanded path. Later, more advanced autonomous driving functions will be tested whereby the rover will use onboard computing capabilities to assess the safety of the terrain on its own.
- The GTM will also be used in the coming weeks for drilling activities. The ExoMars rover is unique in Mars exploration in that it will be first to drill 2 m below the martian surface to retrieve samples for analysis in its sophisticated onboard laboratory. Underground samples are more likely to include biomarkers, since the tenuous martian atmosphere offers little protection from radiation and photochemistry at the surface. Understanding if life once existed on Mars is a key question in planetary science, and at the heart of the ExoMars program.
• May 21, 2021: A series of ground-based high-speed extraction tests confirm the readiness of a new and upgraded parachute and bag system for a high-altitude drop test in early June, part of critical preparations to keep the ExoMars 2022 mission on track for its next launch window. 22)
- The tests, conducted with NASA/JPL’s dynamic extraction test rig in California, USA, focused on demonstrating the readiness of new equipment developed by Airborne Systems, as well as verifying changes to the parachute and bag provided by Arescosmo.
- A series of clips from different angles and at different speeds showing parachute extraction tests for the ExoMars 2022 mission’s first main parachute using a NASA/JPL test rig powered by compressed air. The lid of the parachute assembly is pulled along a suspended cable at high speed while the end of the assembly is fixed to a wall. When the release mechanism is activated, the parachute bag is pulled away from the parachute at the target speed, mimicking the extraction as it will be on Mars. At the highest speeds, the tests enable the extraction to take place at more than 200 km/h.
- The ESA-Roscosmos ExoMars mission, with the Rosalind Franklin rover and Kazachok surface platform contained in a descent module, requires two main parachutes – each with its own pilot chute for extraction – to help slow it down as it plunges through the martian atmosphere. The 15 m-wide first stage main parachute will open while the descent module is still travelling at supersonic speeds, and the 35 m-wide second stage main parachute is deployed once at subsonic speeds.
- The latest round of extraction tests focused on the first main parachute provided by both companies. Arescosmo addressed open issues from previous unsuccessful tests: a new bag design and a revised approach to folding to avoid line-twisting upon extraction. The Airborne Systems parachute and bag also completed several rounds of development tests to validate the extraction process.
- “Both performed very well in the tests,” says Thierry Blancquaert, ESA ExoMars program team leader. “Close inspection showed that a few small areas in the parachute canopy had been subject to friction during the bag extraction process, reducing the strength of the fabric in these few places. Cross-examination with the video footage allowed the Airborne Systems team to pinpoint the moment the damage occurred and make modifications to the bag and packing of the parachute. This could be done with a remarkably quick turnaround of just a couple of days, to arrive at a successful result.”
- The parachute had originally been packed inside the bag around the central mortar that contains the pilot chute, such that upon extraction it unwrapped in a 360º fashion. Folding the band of the parachute in two layers, so that it first unfolds in one direction and then 180º in the other direction, proved to reduce the tendency of the canopy to experience friction incurred by wrapping around the mortar.
- The Airborne Systems first main parachute will now move forward for testing in its first high-altitude drop test scheduled at the start of June from Kiruna, Sweden. Two high-altitude balloons and dummy descent modules are available in the June window, which will see the descent vehicle dropped under the parachute from a stratospheric balloon at an altitude of about 29 km.
- For Arescosmos, the first main parachute will act as a back-up, and instead the focus for them will turn to the second main parachute. Upgrades made to this parachute and bag were already implemented and tested in dynamic extraction tests in December 2020, which included using stronger parachute lines and reinforced material around the parachute apex. For the upcoming high-altitude test, a slightly smaller sized pilot chute (3.7 m compared with 4.5 m previously) will also be implemented, aimed at reducing the energy – and therefore the friction – generated upon extraction of the second main parachute from its bag. This cannot be tested on the ground-based rig in advance, which is only focused on the main parachute extraction from its bag.
- Further ground-based dynamic extraction test slots are anticipated during August to prepare for another pair of high-altitude drop tests foreseen for October/November this year, from Oregon, USA. Further high-altitude test opportunities are also considered during the first half of 2022. Subsequent test configurations will largely depend on the outcome of the upcoming tests in Kiruna, although it is expected to repeat successful tests at least once more.
- High-altitude drop tests require complex logistics and strict weather conditions, making them difficult to schedule, while the ground tests can be repeated on a quick turnaround, buying significantly more time in the test campaign and reducing risk by allowing more tests to be conducted on a short time frame.
- “Our strategy of having two highly qualified teams working on the parachutes, together with the availability of the ground-test rig, is already paying off and we are ready and looking forward to the next high-altitude drop tests,” says Thierry. “Landing safely on Mars is a notoriously difficult task. Investing our efforts in this test strategy is an essential part of ensuring a successful mission when we arrive at Mars in 2023.”
- All parachute system qualification activities are managed and conducted by a joint team involving the ESA project (supported by Directorate of Technology, Engineering and Quality expertise), Thales Alenia Space Italy (prime contractor, in Turin), Thales Alenia Space France (PAS lead, in Cannes), Vorticity (parachute design and test analysis, in Oxford) and Arescosmo (parachute and bags manufacturing, in Aprilia). NASA/JPL-Caltech has provided engineering consultancy, access to the dynamic extraction test facility, and on-site support. The extraction tests are supported through an engineering support contract with Airborne Systems, who also provided NASA’s Mars 2020 parachutes, and by Free Flight Enterprises for the provision of parachute folding and packing facilities. Airborne Systems is also providing parachute design and manufacturing services since 2021.
- Near Space Corporation provide the balloon launch services in Oregon. The Swedish Space Corporation Esrange facility provides the balloon launch services in Kiruna.
• March 5, 2021: ExoMars 2022 goes for a spin. 23)
a) The full ExoMars 2022 mission comprising the carrier module, descent module, Kazachok surface platform and Rosalind Franklin rover have completed essential ‘spin tests’ in preparation for their journey to Mars.
b) Rosalind Franklin’s rover twin on Earth has executed trial science activities for the first time, including drill sample collection and close-up imaging.
c) A new parachute strategy has been adopted ahead of the next series of high altitude drop tests.
Balancing Act
- Essential preparation for the mission’s flight to Mars and plunge through the planet’s atmosphere is to ensure the spacecraft is perfectly balanced when spinning.
- The ExoMars 2022 mission comprises four main units: the ESA-led Rosalind Franklin rover and Roscosmos-led Kazachok surface platform that will perform science activities on the surface of Mars, the descent module in which they are encapsulated, and the carrier module that will transport them from Earth to Mars following launch.
- The spacecraft comprises the carrier module (the eight-sided structure), the descent module (the white module in the center) and the Rosalind Franklin rover and Kazachok surface platform, which are encapsulated inside the descent module. — The spacecraft composite was subjected to a spin up to 30 rpm, corresponding to a centrifugal acceleration of 2g at the outer edge of the heatshield.
- During the cruise to Mars the complete ‘spacecraft composite’ (comprising all four units) will be spinning at about 2.75 revolutions per minute, in order to stabilize itself on its trajectory. The dynamic balancing test checks that there are no imbalances that could induce wobbles in space that would require too much fuel to compensate. It is also important that the spacecraft is balanced so that it spins smoothly around its rotation axis, to keep its antenna pointed to Earth, so that a communication link is possible.
- Once the descent module is released close to Mars, about 30 minutes prior to atmospheric entry, the original spin rate is maintained until atmospheric effects take over, and when the first parachute is deployed. Complete despinning occurs once the propulsion system on the landing platform kicks in close to the surface of Mars.
- Therefore, two dynamic balancing tests were conducted: one test for the complete composite spacecraft, and one without the carrier module, for the descent module with rover and platform inside. In all the tests, which were conducted at Thales Alenia Space’s cleanroom facilities in Cannes, France, the actual flight modules were used.
- During the test with the spacecraft composite, the unit was subjected to a spin up to 30 rpm, corresponding to a centrifugal acceleration of 2g at the outer edge of the descent module’s heatshield.
- Upon completion of the environmental testing at Cannes, the spacecraft will return to Thales Alenia Space’s facilities in Turin, Italy, mid-March, for further functional testing.
Rehearsing Rover Science
- Meanwhile at the Rover Operations Control Centre (ROCC) in Turin, the Rosalind Franklin ‘ground test model’ completed an exciting milestone. While the replica rover is still stationary in the clean room, the operations team commanded it like they would when finally on the surface of Mars.
- “It’s really exciting to have used for the first time the ROCC chain of commands like we will during the real mission,” says Luc Joudrier, ESA’s ExoMars rover operations manager. “We defined the rover’s ‘Activity Plan’, sent it to the rover, and afterwards ingested and processed the data. It’s great to see the ROCC working like this.”
- One of the activities was to test Rosalind Franklin’s one-of-a-kind drill. It is the first time in Mars exploration that a rover will be able to retrieve soil samples down to 2 m underground, where ancient biomarkers may still be preserved from the harsh radiation on the surface, and deliver them to the onboard laboratory. In the recent exercise, the replica rover was commanded to deploy its drill with a dummy sample onboard, transporting it to the Analytical Laboratory Drawer. In reality, on Mars, a sophisticated laboratory will analyze the sample’s composition.
- The rover was also commanded to image the sample with its Close-Up Imager, situated at the bottom of the drill unit.
- The suite of high resolution panoramic cameras were also activated as part of an imaging calibration exercise.
- Soon the twin rover will move into the ROCC’s Mars Terrain Simulation to trial mobility commands and other functional tests. Rover operators and scientists will rehearse these simulations many times and focusing on different rover activities as part of their training between now and the mission arriving on Mars.
New parachute Test Strategy
- The two main parachutes that will help deliver the mission safely to the surface of Mars are scheduled for the next high altitude drop test in May/June this year, from Kiruna, Sweden. Following the high altitude drop test in November 2020, which saw some localised damages to both parachute canopies, a new way forward has been adopted.
- “We have revised our strategy to give us the best chance possible in qualifying the ExoMars parachutes before the end of this year in order to meet our 2022 launch window,” says Thierry Blancquaert, acting ExoMars program team leader. “We have therefore invited a second expert parachute manufacturer to contribute to the ExoMars program by providing us with additional canopies to use in the upcoming opportunities.”
- In addition to the parachutes from Arescosmo, newly manufactured parachutes from Airborne Systems, who helped deliver NASA’s Perseverance rover safely to Mars earlier this month, are also now being manufactured. Airborne Systems also supports the ground-based parachute extraction tests carried out at NASA/JPL.
- Unlike the one-parachute and sky-crane approach used by NASA’s Perseverance rover to land on Mars, the ESA-Roscosmos ExoMars mission requires two main parachutes – each with its own pilot chute for extraction – to help slow the descent module as it plunges through the atmosphere.
• December 8, 2020: The ExoMars Rosalind Franklin rover is seen here sitting on top of the Kazachok surface science platform in stowed configuration, rather similar to how it will journey to Mars in 2022. 24)
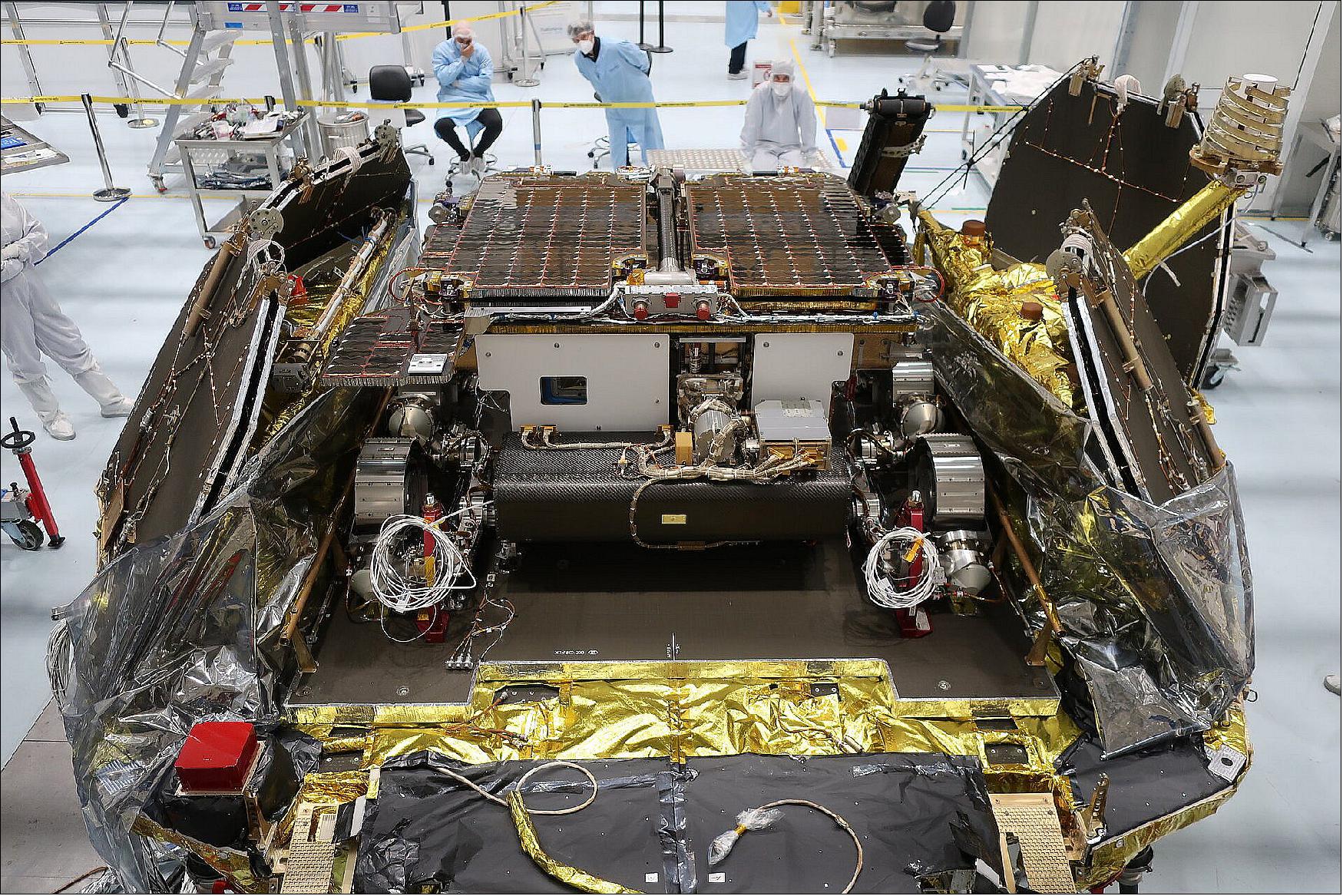
- The landing module will later be integrated inside the descent module for mass balancing checks, together with the carrier module that will transport the mission to Mars.
- This is not the last time the two flight models will be mated. After completion of the tests in Cannes, the rover will return to the TAS cleanrooms in Turin, Italy, for further functional testing, before being shipped to the launch site in Baikonur.
- In this image, the back right solar panel of the landing platform is seen partially deployed. The front of the rover is seen, with its iconic drill stowed in horizontal position. A first in Mars exploration, the drill will extract samples down to a maximum of two meters, where ancient biomarkers may still be preserved from the harsh radiation on the surface, and deliver them to the rover’s sophisticated laboratory for analysis.
- The mission aims to determine the geological history of the landing site at Oxia Planum, once thought to host an ancient ocean, and to determine if life could ever have existed on Mars.
- The ExoMars program is a joint endeavor between ESA and the Russian State Space Corporation, Roscosmos.
- The integration activities at Cannes were carried out by Thales Alenia Space and Airbus Defence and Space teams.
• November 18, 2020: The parachute system that will help deliver the Rosalind Franklin ExoMars rover to Mars has completed the first full-scale high altitude drop test with redesigned elements following two unsuccessful tests last year. Parachute extraction and deceleration proceeded as expected, the test vehicle landed safely and the test parachutes were recovered. However, some canopy damage occurred, pointing to the early inflation process for the focus of further improvements. 25)
- “Landing on Mars is extremely difficult, with no room for error,” says ExoMars Program Team Leader Francois Spoto. “The latest test was a good step forward but is not yet the perfect outcome we are seeking. Therefore, we will use the extensive test data we have acquired to refine our approach, plan further tests and keep on track for our launch in September 2022.”
Parachute Profile
- The Rosalind Franklin rover and Kazachok surface platform are encapsulated inside a descent module that will be transported to Mars by a carrier module. The descent module is equipped with two parachutes – each with its own pilot chute for extraction – to help slow it down prior to landing on Mars. Once the atmospheric drag has slowed the descent module from around 21 000 km/h to 1700 km/h, the first parachute will be deployed. Some 20 seconds later, at about 400 km/h, the second parachute will open. Following separation of the parachutes about 1 km above ground the braking engines will kick in to safely deliver the landing platform onto the surface of Mars. The entire sequence from atmospheric entry to landing takes just six minutes.
- The complete parachute descent system needs testing and verifying on Earth, for which high altitude drop tests play an essential role to help represent the low atmospheric pressure on Mars – a vital aspect when considering parachute inflation.
New Round of High Altitude Tests
- The test conducted from Oregon, USA was delayed from March 2020 due to COVID-19 restrictions, forest fires and unfavorable wind conditions. Logistics re-planning and compatible weather finally enabled it to take place 9 November.
- The test setup saw the drop test vehicle lofted to a height of 29 km in a stratospheric balloon.
- The first main parachute had an upgraded parachute bag and a Kevlar reinforcement around the vent hem (that is, around the vent 'hole' in the center of the parachute). The second main parachute had several reinforcement rings and an upgraded parachute bag, but not reinforced parachute lines, which are also planned. The fully upgraded second parachute will be used in a drop test at the Swedish Space Corporation ESRANGE facility in Kiruna, Sweden in mid-2021. The reinforcement rings were introduced to help prevent the dramatic tearing of the canopies witnessed during tests in 2019.
- The timeline of the latest test, including extraction and deceleration, went exactly to plan. However, four tears in the canopy of the first main parachute and one in the second main parachute were found after recovery. The damage seemed to happen at the onset of the inflation, with the descent otherwise occurring nominally.
- The team are now analyzing the test data to determine further improvements for the next tests. Planning is underway for future tests in the first half of next year, to ‘qualify’ the complete parachute system ready for launch in September 2022.
- Once safely in the Oxia Planum region of Mars in June 2023, the Rosalind Franklin rover will drive off the platform and begin its science mission. It will seek out geologically interesting sites to drill below the surface, to determine if life ever existed on our neighbor planet.
- All parachute system qualification activities are managed and conducted by a joint team involving the ESA, TASinI (prime contractor), TASinF (PAS lead), Vorticity (parachute design and test analysis) and Arescosmo (parachute and bags manufacturing).
- The ExoMars program is a joint endeavor between ESA and Roscosmos. In addition to the 2022 mission, it also includes the Trace Gas Orbiter (TGO) launched in 2016. The TGO is already both delivering important scientific results of its own and relaying data from NASA’s Curiosity Mars rover and InSight lander. It will also relay the data from the ExoMars 2022 mission once it arrives at Mars in 2023.
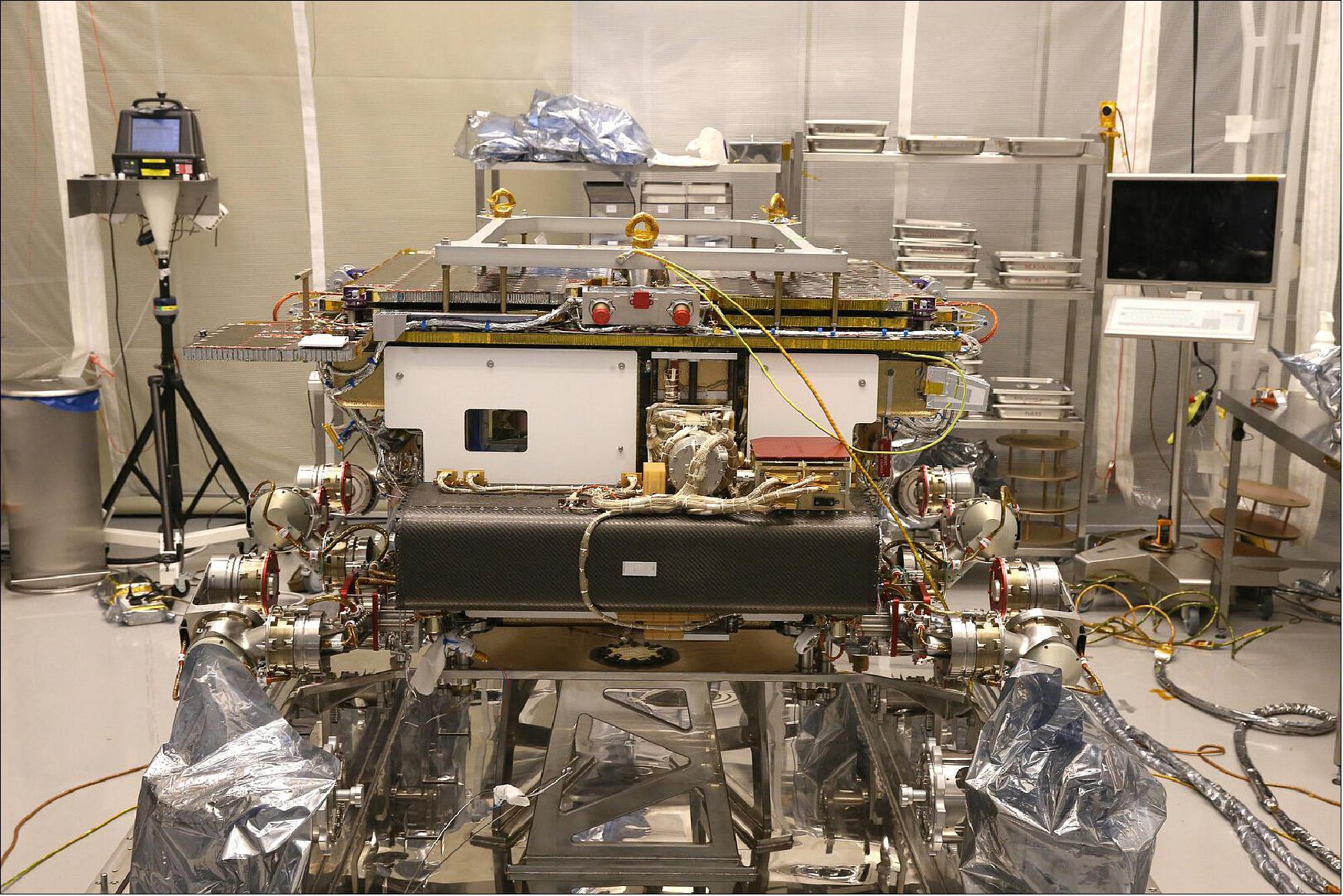
• November 4, 2020: ExoMars platform and rear jacket. 26)

• September 29, 2020: Last Sunday night a long, heavy truck hit the road escorted from Italy with a precious cargo. While most of the citizens in Turin prepared to enjoy their dinner, several modules of the ExoMars spacecraft left the Thales Alenia Space facilities. Next stop: Cannes, France. 27)
- The journey took less than a day. Besides stringent controls in dedicated clean rooms and tents – amongst the cleanest places on Earth – to avoid any biological contamination from Earth to Mars, Russian and European teams took a number of precautionary measures to minimize the risk of spreading the Coronavirus.
- Workers remained fully shrouded within ‘bunny suits’ to control any kind of contamination during the packing of the ExoMars elements before shipment. In this image, two engineers work on ESA’s Rosalind Franklin rover with its solar panels and drill folded.

- The microbiological samples taken after rigorous cleanliness procedures showed that the contamination levels were within the requirements for a safe landing on Mars.
- Engineers will be busy with a series of tests in the next months. The whole spacecraft will undergo thermal, vacuum and acoustic tests during the next months in France. Coming up is the deployment of the solar panels that will power up the Rosalind Franklin rover on Mars.
- Teleworking is nothing new to the ExoMars spacecraft and teams. There will be some remote operations in France before the year ends. Rosalind Franklin will be commanded from the Rover Operations Control Center (ROCC) at the ALTEC premises in Turin, Italy, to rehearse cruise and deployment maneuvers once on the surface of Mars.
- ExoMars leaves behind an intense period of testing in Italy since April, from health checks to assembly, maintenance operations and leak tests. Fasteners have been added to the solar panels of the rover to increase robustness during the unfolding and surface operations on the Red Planet.
- Rosalind Franklin is fitted with a drill – a first in Mars exploration – to extract samples down to a maximum of two meters, where ancient biomarkers may still be preserved from the harsh radiation on the surface, and hosts a sophisticated laboratory to analyze the samples on Mars.
- Both drill and laboratory have been extensively tested using soil similar to that expected on Mars and under conditions representative of the martian environment.
- The ExoMars program is a joint endeavor between ESA and the Russian State Space Corporation, Roscosmos.
• July 22, 2020: As Mars exploration prepares for a rebirth, a European rover tunes up its gear for the challenges ahead. 28)
- On 23 July, ESA and dozens of industrial partners will assess the readiness of the ExoMars robotic explorer, named Rosalind Franklin, for a trip to the Red Planet in 2022. The European rover will drill down to two meters into the martian surface to sample the soil, analyze its composition and search for evidence of life buried underground.
- The rover successfully proved that it is fit to endure the martian conditions during the environmental test campaign earlier this year in Toulouse, France. This laboratory on wheels withstood temperatures as low as –120°C and less than one hundredth of Earth’s atmospheric pressure to simulate the extremes of its journey through space and on the surface of Mars.
- By the end of this week a more robust set of solar panels will begin its trip to reunite with the rover after some cracks were detected during those environmental tests. New fasteners are in place and will be on their way from the Airbus facilities in Stevenage, in the UK, to Thales Alenia Space in Turin, Italy, where the rover awaits power up at the beginning of August.
- The disruptions caused by the coronavirus pandemic have added new obstacles for industry across Europe on the road to Mars. Parachute and interface tests are expected to resume in October.
- New missions to Mars launch from a broad range of nations – while the United Arab Emirates’ historic first mission to Mars lifted off from Japan last Sunday, China is preparing to launch tomorrow its first rover to Mars, known as Tianwen-1. NASA’s Mars 2020 mission is set to take off with the Perseverance rover onboard next week, on July 30.
- These missions focus on the search for evidence of life on the Red Planet and a better understanding of how Earth and Mars evolved so differently.
- “We hope that ESA’s Rosalind Franklin rover will help write a new page in Mars exploration by allowing us to study organic molecules on the spot,” says Jorge Vago, ESA’s ExoMars project scientist.
- Dr Rosalind Franklin, the prominent scientist behind the discovery of the structure of DNA, one of life’s most important molecules, would have been 100 years old on 25 July this year. Her niece, also named Rosalind Franklin in her memory, points out that the X-ray diffraction expert “never conceived science as a race of competitors.”
- After a visit to ESA’s technical center in the Netherlands last year, Rosalind believes that her aunt would have loved the ExoMars team spirit. “The work of ESA engineers on the rover struck me – they really do it for the results, not for themselves. This is what Rosalind Franklin was all about: commitment and dedication to science,” said Rosalind from her home in California, US.
- A series of talks and events is taking place around the globe this week to celebrate the centenary of this “woman of integrity who went after scientific discovery for the betterment of humankind”, as her niece describes her. The legacy of the scientist lives on today, and the ExoMars rover will help leave her symbolic footprint on Mars in 2023.
• May 15, 2020: The second ExoMars mission is taking advantage of the extra time to upgrade some of the rover’s instruments and get ready for the next parachute high-altitude drop tests. 29)
- The new launch date on the horizon is allowing more margin for replacements and repairs to the ExoMars Rosalind Franklin rover.
- The solar panels that will help the rover survive the cold Martian nights will gain in strength. After some cracks were detected during the environmental tests earlier this year, new fasteners will be installed to reinforce the interface between panels and holding brackets at the Airbus facilities in Stevenage, in the UK.
- The flight model of the rover remains at Thales Alenia Space in Turin, Italy, for routine maintenance operations, such as battery charge and cleanliness checks.
- Strict microbiological controls are key to make sure that ExoMars does not introduce terrestrial contamination to the Red Planet. This is to comply with the stringent planetary protection requirements and to avoid false positives in the scientific measurements – what scientists call ‘forward contamination’.
- Scientists and engineers are looking into replacing the secondary electronics box on the Mars Organic Molecule Analyzer, MOMA, an instrument capable of detecting organic molecules and investigate the potential origin, evolution and distribution of life on Mars.
- The infrared spectrometer that will analyze minerals on the surface, ISEM, might also be replaced with a spare model with better performance.
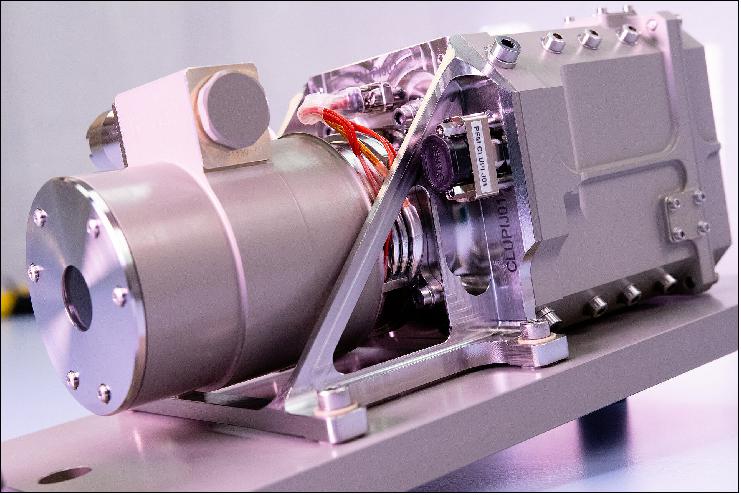
- One of the cameras on top of the rover’s drill designed to acquire high-resolution and color images of the rocks and soil around the rover – the Close-Up Imager, CLUPI – is having a software upgrade.
- “The instruments were already in great shape, but having found the time to make these improvements is fantastic for our scientific mission on Mars,” says Jorge Vago, ESA’s ExoMars project scientist.

Parachutes Ready for Drop Tests
- New deployment bags for the parachutes of the ExoMars mission are cleared to go for final high-altitude drop tests. However, travel restrictions in response to the coronavirus pandemic have forced to postpone these tests from May to September 2020 at the earliest.
- The dynamic extraction test campaign was a success. The updated design with eased lines and canopy exit proved to avoid tears at extraction velocities of 200 km/h, similar to the high speeds at which the parachutes will be pulled from their bags during the descent towards the surface of Mars.
- “The meticulous folding of each parachute inside its bag is essential to guarantee a correct deployment,” explains Thierry Blancquaert, ExoMars spacecraft systems engineering team leader.
- Just the folding of the second main parachute, which with 35 m of diameter will be the largest to ever fly on Mars, takes over three days.
- A total of six ground-based tests saw the clean extraction of the parachutes from their bags, with no frictional damage, during a test campaign between November 2019 and January 2020 at NASA’s Jet Propulsion Laboratory in California, US.
- These tests followed the high-altitude drop tests in 2019, during which critical damage to both parachute canopies was observed.
- The two parachutes – each with its own pilot chute for extraction – are key to slow the ExoMars descent module before landing on the Red Planet. In just six minutes, the module goes from around 21,000 km/h during atmospheric entry to a soft landing at the surface.
Flawless Release
- The high-speed tests mimicked the extraction velocity the parachutes will experience during the descent phase, just a couple of minutes before touchdown. A compressed air cannon shot the bag horizontally, releasing the parachute as it will happen during the mission.
- “The extraction takes a split second, it all happens very quickly,” says Thierry.
- ESA benefitted from NASA’s hands-on parachute experience. The cooperation gave Europe access to special test equipment at the Jet Propulsion Laboratory, and the opportunity to run several dynamic extraction tests on a quick turnaround.
- “It was a real challenge to organize this campaign so quickly with all the industry partners involved. The support provided by NASA was excellent and instrumental to the successful validation of our new parachute deployment bags,” adds Thierry.
Flying Higher
- The next step, high-altitude drop tests at a test range in Oregon, US, will have to wait until the end of September 2020. This type of tests requires complex logistics and strict weather conditions for flight safety.
- The test parachute embedded into its canister and mounted onto a drop test vehicle will be lifted to an altitude of nearly 30 km with a stratospheric helium balloon. This drop test vehicle will be released by telecommand and freefall until the test parachute sequence starts in pressure conditions similar to diving into the thin martian atmosphere.
- These tests should demonstrate the capability of the main parachutes to deploy smoothly from their bags and to sustain the inflation loads without tearing.
• April 2, 2020: Carefully wrapped inside this donut-shaped bag is a 35-m diameter parachute that will endure a frenzied six-minute dive into martian atmosphere. 30)
- The 64 kg parachute, made mostly of nylon and Kevlar fabrics, has been thoroughly sterilized to reduce its level of contamination for planetary protection. One of the main goals of ExoMars is to search for signs of life on the Red Planet, so any microbes hitchhiking on its ride from Earth would interfere with the investigation and could trigger a false positive – what scientists call ‘forward contamination’.
- The potential existence of past and perhaps even present life on Mars requires rigorous sterilization. Scientists want to be sure that the instruments on the ExoMars rover Rosalind Franklin, only detect signs of indigenous life, but protecting the martian environment from ourselves is equally as important. A planetary protection policy by the Committee on Space Research (COSPAR) details all requirements, in compliance with the United Nations Outer Space Treaty.
- The parachute was heated in an oven at 125°C for several days to kill any microbes. The oven is part of ESA’s Life, Physical Sciences and Life Support Laboratory, a state-of-the-art facility in the Netherlands. The Laboratory has also cleaned ExoMars instruments and subsystems, but this second stage parachute is the largest item to be sterilized.
- The dry heat sterilizer is in the ‘ISO Class 1’ cleanroom, one of the cleanest places in Europe. All air passes through a two-stage filter ensuring less than 10 dust particles no larger than 10 millionth of a meter, or less than the size of the coronavirus.
- People working on the ExoMars hardware are the main biohazard. Every day, each of us sheds millions of skin particles. Everyone entering the chamber has to gown up more rigorously than a surgeon before passing through an air shower to remove any remaining contaminants. Watch how to dress to avoid being a ‘bioburden’ in the latest ExoMars vlog.
- The parachute will next prove itself in high-altitude drop tests. The whole parachute assembly system, mounted onto a drop test vehicle, will be lifted to an altitude of nearly 30 km by helium balloon. The vehicle will free-fall until the test parachute sequence starts in pressure conditions similar to diving into the martian atmosphere.
- The dates of these tests have been postponed due to the coronavirus outbreak, and a new window of opportunity for testing is pending confirmation.

• March 12, 2020: The joint ESA-Roscosmos project team evaluated all the activities needed for an authorization to launch, in order to analyze the risks and schedule. With due consideration of the recommendations provided by European and Russian Inspectors General, ExoMars experts have concluded that tests necessary to make all components of the spacecraft fit for the Mars adventure need more time to complete. 31)
- The primary goal of the mission is to determine if there has ever been life on Mars, and to better understand the history of water on the planet. The ExoMars rover, named Rosalind Franklin, includes a drill to access the sub-surface of Mars as well as a miniature life-search laboratory kept within an ultra-clean zone.
- In the frame of a dedicated meeting, ESA and Roscosmos heads Jan Wörner and Dmitry Rogozin agreed that further tests to the spacecraft with the final hardware and software are needed. In addition, the parties had to recognize that the final phase of ExoMars activities are compromised by the general aggravation of the epidemiological situation in European countries.
- "We have made a difficult but well-weighed decision to postpone the launch to 2022. It is driven primarily by the need to maximize the robustness of all ExoMars systems as well as force majeure circumstances related to exacerbation of the epidemiological situation in Europe which left our experts practically no possibility to proceed with travels to partner industries. I am confident that the steps that we and our European colleagues are taking to ensure mission success will be justified and will unquestionably bring solely positive results for the mission implementation," said Roscosmos Director General Dmitry Rogozin.
- "We want to make ourselves 100% sure of a successful mission. We cannot allow ourselves any margin of error. More verification activities will ensure a safe trip and the best scientific results on Mars,” said ESA Director General Jan Wörner.
- "I want to thank the teams in industry that have been working around the clock for nearly a year to complete assembly and environmental testing of the whole spacecraft. We are very much satisfied of the work that has gone into making a unique project a reality and we have a solid body of knowledge to complete the remaining work as quickly as possible."
- To date, all flight hardware needed for the launch of ExoMars has been integrated in the spacecraft. The Kazachok landing platform is fully equipped with thirteen scientific instruments, and the Rosalind Franklin rover with its nine instruments recently passed final thermal and vacuum tests in France.
- The latest ExoMars parachutes dynamic extraction tests have been completed successfully at NASA’s Jet Propulsion Laboratory, and the main parachutes are ready for the two final high-altitude drop tests in March in Oregon, US.
- The descent module has been undergoing propulsion system qualification in the past month. The ExoMars descent module and landing platform have been undergoing environmental testing in Cannes, France, to confirm the spacecraft is ready to endure the harsh conditions of space on its journey to Mars.
- ExoMars will be the first mission to search for signs of life at depths up to two meters below the martian surface, where biological signatures of life may be uniquely well preserved.
• February 14, 2020: The Rosalind Franklin ExoMars rover after completing environmental and vacuum testing in Toulouse, France. The rover was tested in a clean room to withstand conditions similar to those on Mars. 32)
- The ExoMars rover will be Europe’s first planetary rover. It will search for signs of past or present life on Mars and is equipped with a 2m drill to take samples from below the surface where they will have been protected from the harsh radiation environment.
• February 13, 2020: The ExoMars landing platform, carrier and descent modules together during environmental testing in the anechoic chamber at Thales Alenia Space (TAS) in Cannes, France. 33)
- The composite spacecraft is undergoing environmental testing to confirm it is ready to endure the harsh conditions of space on its eight-month journey to Mars.
- The three integrated modules were placed in a special chamber with the inside walls covered with pyramid-shaped non-reflective foam to absorb signals such as TV and radio, radar and even mobile phone calls, and prevent unwanted reflections.

- The tests will verify that the modules work well together without any glitches or interference.
- The ExoMars mission will investigate how Mars has evolved and whether there may be conditions for life.
• January 16, 2020: The Rosalind Franklin rover of the joint ESA-Roscosmos ExoMars mission completed a series of environmental tests at the end of 2019 at Airbus, Toulouse, France. This included final thermal and vacuum tests where the Rover is heated and cooled to simulate the temperatures of its journey through space and on the surface of Mars. For example, Rosalind Franklin can expect temperatures dropping to –120°C outside, and –50 °C inside the rover once on Mars. It must also be able to operate in less than one hundredth of Earth’s atmospheric pressure – and in a carbon dioxide-rich atmosphere. 34)
- Last year the ‘structural and thermal model’ of the rover successfully completed a rigorous environmental test campaign; the latest round of tests subjected the real flight-model to the simulated space environment.
- Now the focus moves to final checks on the rover systems. This includes checking the alignment of instruments working together, such as the imaging systems, and a final functional test of the integrated system after the environmental campaign. Once these verifications on the rover are completed, a functional check of the interfaces with the surface platform and descent module that will deliver it safely to the surface of Mars will be performed at Thales Alenia Space, Cannes, France.
- The primary goal of the mission is to determine if there is or there has ever been life on Mars, and to better understand the history of water on the planet. The rover will seek out interesting geological locations to examine with its scientific tools and to drill to retrieve underground samples, on a quest to tackle these questions.
• December 19, 2019: A series of ground-based tests designed to check the extraction of the ExoMars 2020 mission’s parachutes from their bags have started successfully with promising results to keep the mission on track for next year’s launch. 35)
- Landing on Mars is a high-risk endeavour with no room for error. In just six minutes, a descent module with its precious cargo cocooned inside has to slow from around 21,000 km/h at the top of the planet’s atmosphere, to a soft landing at the surface controlled by the lander’s propulsion system.
- A key element of reaching the surface safely is based around a parachute system.
- For ExoMars 2020, which comprises the Rosalind Franklin rover to explore the planet for signs of life, and the Kazachok surface platform to monitor the local environment at the landing site, a two-parachute system is used, each with its own pilot chute for extraction. The first main parachute has a diameter of 15 m and will be deployed while the descent module is still travelling at supersonic speeds, while the second main parachute has a 35 m diameter, the largest to ever fly on Mars.
- Earlier this year, during two high-altitude drop tests, damage to both parachute canopies was observed. Intensive investigations revealed that the main issues concerned the parachute bags, and not the parachutes themselves. Thanks to support from NASA to benefit from their hands-on parachute experience, ESA has made modifications to the way the parachutes are released from the bags, to ease the extraction and avoid frictional damage.
- The cooperation with NASA has also provided access to special test equipment at NASA’s Jet Propulsion Laboratory that is enabling ESA to conduct multiple dynamic extraction tests on the ground to validate the new design adaptations prior to the upcoming high-altitude drop tests. The ground tests mimic the high speeds at which the parachutes will be pulled from their bags during the descent phase at Mars.
- Calibration tests, including low-speed extraction tests at around 120 km/h on both main parachutes and the first high-speed extraction test at a targeted speed of just over 200 km/h on the first main parachute, have already been completed. The low-speed tests were crucial to verify the stability of the new parachute bag design, while the high-speed tests mimic that at which the parachutes will be pulled from their bags during the descent phase at Mars.
- Real-time observations of these initial tests showed a clean and correct release of the parachutes from their bags, with no damages seen in either the parachute system or the bag.
- “Landing on Mars is difficult and we cannot afford to have any loose ends,” says Thierry Blancquaert, ExoMars Spacecraft Systems Engineering Team Leader. “After many hurdles, the parachute system modifications are moving forward, and these preliminary tests show very promising results that pave the way for the next qualification tests.”
- To save time and resources, and to quickly test the proof of concept of the new parachute bags, the initial tests were carried out using the repaired parachutes from the high-altitude drop tests. Given the positive results of the first tests, and following the completion of the high-speed tests, the extractions will be repeated using the existing parachute ‘spares’, which have not been previously damaged or undergone repairs.
- Importantly, unlike the high-altitude drop tests which require complex logistics and strict weather conditions, making them difficult to schedule, the ground tests can be repeated on a quick turnaround, buying significantly more time in the test campaign and reducing risk by allowing more tests to be conducted on a short time frame.
- Further high-speed tests are planned in the coming weeks to confirm the results of the preliminary tests. Then the parachute systems will be tested again in two high-altitude drop tests in Oregon, US, in February and March 2020. The tests have to be completed prior to the ExoMars project’s ‘qualification and acceptance review’ planned for the end of April in order to meet the 2020 launch window (26 July–11 August).
- In the meantime, the rover is nearing completion of its environmental test campaign at Airbus, Toulouse, France. At the same time, the flight model spacecraft that will transport the mission from Earth to Mars, and which contains the carrier module coupled with the Russian descent module, is at Thales Alenia Space, Cannes, France, where it underwent thermal environment tests. The scientific instruments of the surface platform are now being integrated by the Russian Academy of Sciences (IKI). The rover is expected in Cannes in late January, with the integration into the lander foreseen end February.
- The mission will launch on a Proton-M rocket with a Breeze-M upper stage from Baikonur, Kazakhstan. Once landed safely in the Oxia Planum region of Mars on 19 March 2021, the rover will drive off the surface platform, seeking out geologically interesting sites to drill below the surface, to determine if life ever existed on our neighbor planet.
- All parachute system qualification activities are managed and conducted by a joint team involving the ESA project (supported by Directorate of Technology, Engineering and Quality expertise), TAS-I (prime contractor, in Turin), TAS-F (PAS lead, in Cannes), Vorticity (parachute design and test analysis, in Oxford) and Arescosmo (parachute and bags manufacturing, in Aprilia). NASA/JPL-Caltech has provided engineering consultancy, access to the dynamic extraction test facility, and on-site support. The extraction tests are supported through an engineering support contract with Airborne Systems, who also provide NASA’s Mars 2020 parachutes, and by Free Flight Enterprises for the provision of parachute folding and packing facilities.
- The ExoMars program is a joint endeavour between ESA and Roscosmos. In addition to the 2020 mission, it also includes the Trace Gas Orbiter (TGO) launched in 2016. The TGO is already both delivering important scientific results of its own and relaying data from NASA’s Curiosity Mars rover and InSight lander. It will also relay the data from the ExoMars 2020 mission once it arrives at Mars in March 2021.

• December 13, 2019: The work of Dr Rosalind Franklin (1920-1958) is well known for being central to the discovery of the iconic double-helix structure of DNA, the fabric of life as we know it on Earth. More than half a century later, she also inspired the name of ESA’s ExoMars rover. But the lasting imprint Rosalind left on her family also inspired her younger brother to name his own daughter Rosalind. 36)
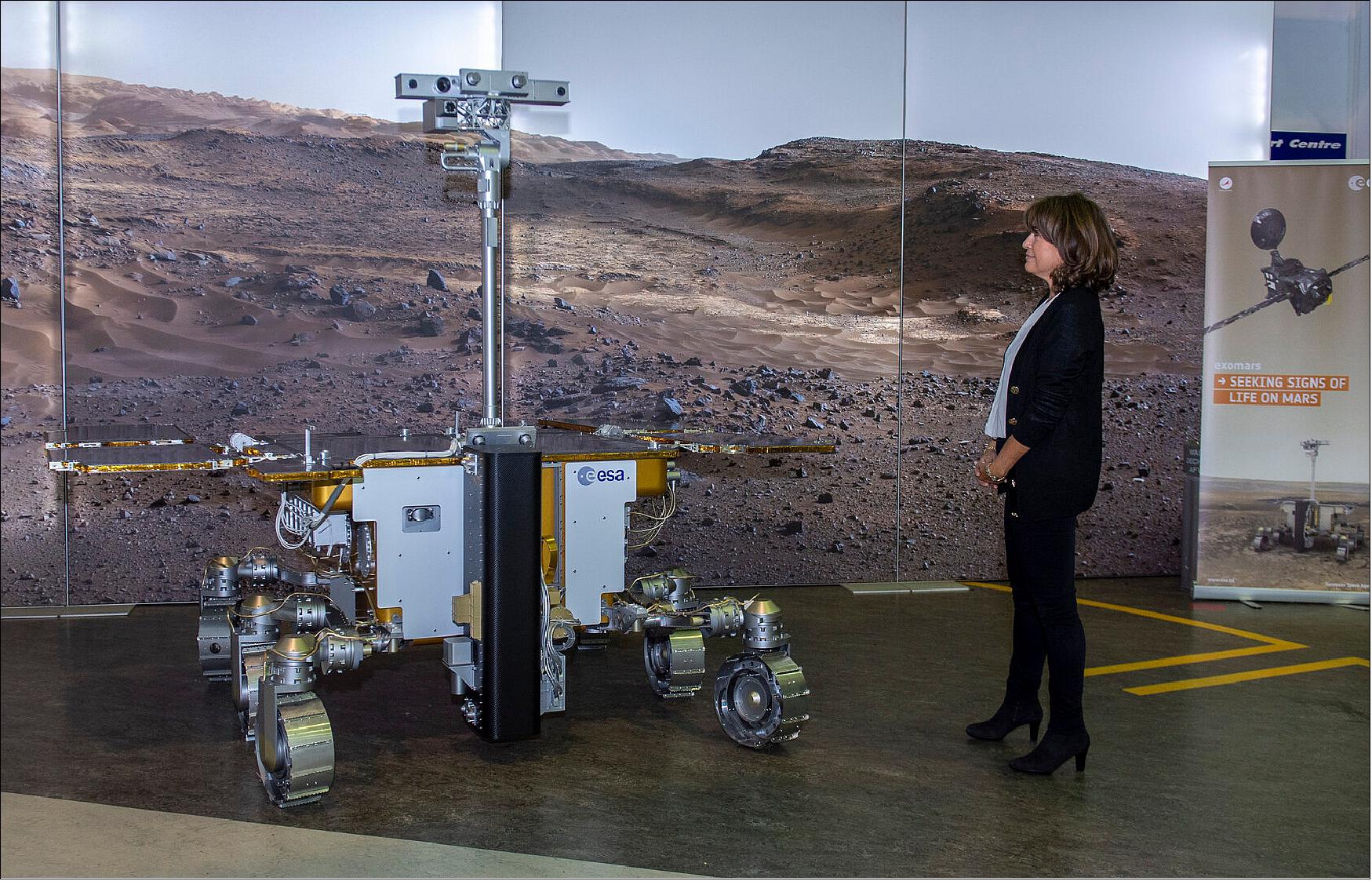
- Rosalind said: “I was overwhelmed to see the rover and to meet the extraordinary scientists that have dedicated years to the development of the project, bringing it from concept to reality, and recognizing my Aunt Rosalind’s contribution to science by naming it after her. It was truly moving and filled me with pride and appreciation. It was an amazing day of learning and discovery and I know she would feel so honored and full of admiration towards everyone involved.”
- ExoMars mission experts were on hand to answer her questions and to explain more about how the rover will be driven across the martian surface, and the science experiments it will carry out. One of the unique aspects of the rover is its two meter long drill that will retrieve underground samples for analysis in its onboard laboratory, where it will be able to sniff out signatures of life past or present.
- Just as scientific discovery is in the soul of the ExoMars program, Dr Rosalind Franklin knew from a young age that she wanted to be a scientist. Devoted and determined, she followed her dream, graduating with a Natural Sciences degree from Cambridge University, UK, in 1941, and earning a PhD in physical chemistry in 1945. She became an expert in X-ray diffraction imaging, applied to studying the physical chemistry of coals, and later revealing the hidden secrets of DNA, RNA and viruses.
- Her legacy lives on today in a number of ways: numerous scientific institutes carry her name – one example being in the Rosalind Franklin University of Medicine and Science in Chicago, U.S, that her niece is a trustee of. Next year her legacy will extend into space, and her adventurous spirit will be lived through the intrepid exploration of the Rosalind Franklin ExoMars rover as it discovers hidden secrets of the Red Planet.
- The ExoMars program is a joint endeavor between ESA and Roscosmos and comprises two missions: the first – the TGO (Trace Gas Orbiter) – launched in 2016 while the second, comprising the Rosalind Franklin rover and Kazachok surface platform, is planned for 2020. Together they will address the question of whether life has ever existed on Mars. The TGO is already delivering important scientific results and will also relay the data from the ExoMars 2020 mission once it arrives at Mars in March 2021.
• October 15, 2019: Positive steps towards solving the problems discovered with the ExoMars mission parachutes have been taken in the last month. 37)
- The mission needs two parachutes – each with its own pilot chute for extraction – to help slow the descent module prior to landing on Mars. Once the atmospheric drag has slowed the descent module from around 21,000 km/h to 1,700 km/h, the first parachute will be deployed. Some 20 seconds later, at about 400 km/h, the second parachute will open. Following separation of the parachutes about 1 km above ground the braking engines will kick in to safely deliver a landing platform – with a rover encapsulated inside – onto the surface of Mars for its scientific mission. The entire sequence from atmospheric entry to landing takes just six minutes.
- While the deployment sequence of all four parachutes was successfully tested in high altitude drop tests earlier this year, damage to the 15 m-diameter primary parachute and 35 m-diameter secondary parachute canopy was observed. Despite precautionary design adaptations being introduced for a second test of the 35 m parachute, canopy damage occurred again.
- A thorough inspection of all the recovered hardware has since been completed, allowing the team to define dedicated design adaptations to both primary and secondary main parachutes. Some promising design changes will also be applied to the parachute bags to ease the lines and canopy exit from the bags, avoiding frictional damage.
- ESA has also requested support from NASA to benefit from their hands-on parachute experience. This cooperation gives access to special test equipment at NASA’s Jet Propulsion Laboratory that will enable ESA to conduct multiple dynamic extraction tests on the ground in order to validate any foreseen design adaptations prior to the upcoming high altitude drop tests.
- The next opportunities for high altitude drop tests are at a range in Oregon, US, January–March 2020. ESA is working to complete the tests of both the 15 m and 35 m parachute prior to the ExoMars project’s ‘qualification acceptance review’, which is planned for the end of April.
- The qualified parachute assembly, inside its flight canister, should ideally be integrated into the spacecraft prior to shipment to Baikonur in April, but it is also possible to do so during the spacecraft preparation activities at the launch site in May.
- The rover is currently undergoing its environmental test campaign at Airbus Toulouse, France. At the same time, the flight carrier module containing the descent module and lander platform is completing its final round of testing at Thales Alenia Space, Cannes, France. The rover will be integrated into the spacecraft in early 2020.
- All parachute system qualification activities are managed and conducted by a joint team involving the ESA project (supported by Technical Directorate expertise), TASinI (prime contractor), TASinF (PAS lead), Vorticity (parachute design and test analysis) and Arescosmo (parachute and bags manufacturing).
• September 16, 2019: Scientists at TU Dortmund University are generating high-accuracy 3D models of the terrain in Oxia Planum on Mars, ahead of the arrival of the ESA/Roscosmos ExoMars rover, Rosalind Franklin, in 2021. The DTMs (Digital Terrain Models) have a resolution of about 25 cm per pixel and will help scientists to understand the geography and geological characteristics of the region and to plan the path of the rover around the site. 38)
- The DTMs are based on high-resolution imagery from the HiRISE instrument on NASA’s Mars Reconnaissance Orbiter. HiRISE imagery has been widely applied to the classic stereo method of combining two images taken from slightly different angles to create a 3D picture of the landscape. However, conventional stereo techniques have limitations when applied to relatively homogeneous regions like the rover’s landing site. The team used an innovative technique called ‘Shape from Shading’ in which the intensity of reflected light in the image is translated into information on surface slopes. This slope data is integrated into the stereo imagery, giving an improved estimate of the 3D surface, achieving the best resolution possible in the reconstructed landscape, showing small-scale features like dune ripples and other rough surfaces.
- Oxia Planum lies at the boundary where many channels emptied into the vast lowland plains. Observations from orbit show that the region exhibits layers of clay-rich minerals that were formed in wet conditions some four billion years ago, likely in a large body of standing water. The rover contains a suite of instruments, including a drill, to examine the site for signs of biosignatures.
- The models were presented at the EPSC-DPS (European Planetary Congress-AAS Division for Planetary Sciences) Joint Meeting 2019 in Geneva on Monday 16 September 2019.
• September 6, 2019: The ExoMars carrier module and descent module containing the lander platform Kazachok have been integrated in Turin, Italy. A structural-thermal model of the rover is contained inside. 39)

- The composite craft will now move on to Cannes, France for environmental testing, while the Rosalind Franklin rover undergoes environmental testing in Toulouse, France.
• August 27, 2019: The Rosalind Franklin ExoMars rover has completed its construction activities in the UK and will now depart to France for testing under the conditions of the Red Planet’s environment. 40)
- The final pieces of the rover’s scientific suite of instruments were attached at the Airbus Defence and Space site in Stevenage over the last weeks. The finishing touches included the ‘eyes’ of the rover: the high-resolution cameras that will provide panoramic and close-up images of the terrain that the rover will explore once on Mars in 2021.
- The primary goal of the mission is to determine if there has ever been life on Mars, and to better understand the history of water on the planet. The rover will seek out interesting geological locations to examine with its scientific tools and to drill to retrieve underground samples, on a quest to tackle these questions.
- As such, the rover was assembled in a sterile cleanroom under stringent cleanliness rules to avoid that organics, including traces of human life, are accidentally carried to Mars and contaminate the samples.
- After 18 months of activities at Stevenage, the rover has now been sealed up and waved off from the UK. Its next stop is Airbus Toulouse, France where it will undergo four months of intense testing to confirm it is compatible with the mission operations and the martian environment.
- “Completing the build of the Rosalind Franklin rover under the strict cleanliness requirements, with all the science instruments onboard, is a major milestone of our ExoMars program. It is thanks to the dedication of all the teams involved that we are able to celebrate this moment today,” says David Parker, ESA’s Director of Human and Robotic Exploration.
- “We’re looking forward to completing the final rounds of tests before the rover is declared flight ready and closed inside the landing platform and descent module that will deliver it safely to the surface of Mars.”
• August 20, 2019: The full suite of scientific instruments, including cameras that will give us our eyes on Mars, the drill that will retrieve pristine soil samples from below the surface, and the onboard laboratory that will seek out signs of life are all installed on the ExoMars rover. 41)
- The rover, named after the pioneering scientist Rosalind Franklin, is part of the ESA-Roscosmos ExoMars program, and is nearing completion at Airbus Defence and Space, Stevenage, UK. The rover is now seen with its recently added PanCam, which sits on top of a mast that rises 2 m above the ground. PanCam will be fundamental in the day-to-day scientific operations of the rover to assist with scientific decisions on where to drive and drill.
- Determining whether life ever existed on the Red Planet, or still does today, is at the heart of the ExoMars program. While spacecraft exploring Mars in the last decades have shown that the surface is dry and barren, billions of years ago it was much more reminiscent of Earth, with water flowing in rivers and lakes, perhaps seas. If life ever began in this very early period, scientists think that the best chances to find evidence for it is to look underground, in ancient regions of Mars that were once influenced by water.
- The Rosalind Franklin rover will land in what scientists think might have been an ancient ocean, close to the boundary where channels from the southern highlands of Mars connect to the smooth northern lowlands. After the initially wet era in the planet’s early history, lavas from volcanic eruptions covered large areas of Mars, some resisting erosion until today. This means that the landing site’s underlying materials may only have been exposed recently, initially protecting them from space radiation and later making them accessible to the rover and its analytical tools.
- PanCam, with its stereo and high-resolution cameras will provide detailed views of geologically interesting features in visible and near-infrared wavelengths, and together with measurements made by the spectrometers, will tell us what the rocks are made of and if they were influenced by water in the past. In select locations the drill will retrieve samples from up to 2 m below the surface, delivering them to the onboard science laboratory for detailed analysis to sniff out signs of biological signatures.
- A camera on the bottom of the drill unit will provide close-up images of the soil that is churned out by the drilling action. When the drill is in ‘stowed’ position the camera will be able to image the area in front of the rover. The Clupi (Close-up imager) recently underwent final calibration tests at ESA’s technical facility in the Netherlands, before being shipped to Stevenage to be attached to the drill unit (see Figure 66).
- In addition to the cameras, spectrometers, drill and analytical lab, the rover also has sub-surface sounding radar and neutron detector.
- “Our rover has really taken shape,” says Jorge Vago, ESA’s ExoMars rover project scientist. “We have an incredibly powerful scientific payload to explore the surface and subsurface of Mars on our quest to find biosignatures.”
- With the scientific suite of instruments onboard, the rover is sealed up in a dedicated cleanroom. Once final checks have been completed, the rover will be transported from the UK to Toulouse, France. There it will undergo environmental testing to confirm it is ready for the conditions on Mars. Once complete it will move on to Cannes, France for final integration with the lander platform, named Kazachok, and with the descent module and carrier module that will transport the mission from Earth to Mars.

• August 16, 2019: The ExoMars mission will see Rosalind Franklin the rover and its surface platform Kazachok land on the Red Planet in 2021. From fine-grained soil to large boulders and slopes, the rover has to be able to move across many types of terrain, collect samples with a 2 m-long drill and analyze them with instruments in its onboard laboratory. 42)
- This second episode about ExoMars features the challenges of leaving the surface platform, overcoming obstacles and walking on dunes.
- ESA, Roscosmos, Thales, Airbus and RUAG engineers put a full-sized model through a series of tests to fine-tune how the rover will move from its landing platform onto the martian terrain.
- Rovers on Mars have previously been caught in sand, and turning the wheels dug them deeper – just like a car stuck in mud or snow. To avoid this, Rosalind the rover has a unique locomotion mode called ‘wheel walking’.
• August 12, 2019: As the second ExoMars mission, comprising a rover and surface science platform, progresses towards launch next year, teams continue to troubleshoot the parachute design following an unsuccessful high-altitude drop test last week. 43)
- The European-built Rosalind Franklin rover and the Russian-led surface platform, Kazachok, are nearing completion. They will be encapsulated in a descent module, and transported to Mars by a carrier module, following launch on a Proton rocket from Baikonur.
- The descent module needs two parachutes – each with its own pilot chute for extraction – to help slow the craft prior to landing. Following separation of the parachutes, the speed must be suitable for the braking engines to safely deliver the landing platform and the rover onto the surface of Mars. The entire sequence from atmospheric entry to landing takes just six minutes.
- As part of the planned testing prior to launch, several parachute tests were scheduled at the Swedish Space Corporation Esrange site. The first took place last year and demonstrated the successful deployment and inflation of the largest main parachute in a low-altitude drop test from 1.2 km, deployed by a helicopter. The parachute has a diameter of 35 m, which is the largest parachute ever to fly on a Mars mission.
- On 28 May this year, the deployment sequence of all four parachutes was tested for the first time from a height of 29 km – released from a stratospheric helium balloon. While the deployment mechanisms activated correctly, and the overall sequence was completed, both main parachute canopies suffered damage.
- Following hardware inspection, adaptations were implemented to the design of the parachutes and bags ready for the next high-altitude test, which was conducted on 5 August, this time just focusing on the larger, 35 m diameter, parachute.
- Preliminary assessment shows that the initial steps were completed correctly, however damages to the canopy were observed prior to inflation, similar to the previous test. As a result, the test module descended under the drag of the pilot chute alone.
- “It is disappointing that the precautionary design adaptations introduced following the anomalies of the last test have not helped us to pass the second test successfully, but as always we remain focused and are working to understand and correct the flaw in order to launch next year,” says Francois Spoto, ESA’s ExoMars Team Leader.
- All hardware, videos and recorded telemetries have now been recovered and are currently under evaluation. The analysis should reveal the root cause of the anomaly and will be able to guide the way forward in terms of further modifications that might be required to the parachute system before subsequent test opportunities.
- A further high-altitude test is already foreseen for the first main parachute before the end of this year. The next qualification attempt of the second main parachute is then anticipated for early 2020.
- In parallel, the teams are investigating the possibility to manufacture additional parachute test models and conducting ground-based simulations to mimic the dynamic nature of parachute extraction, since there are not many opportunities for full-scale high-altitude drop tests.
- Furthermore, in addition to the regular forum of exchanges between ESA and NASA experts, a workshop of Mars parachute specialists will convene next month to share knowledge.
- “Getting to Mars and in particular landing on Mars is very difficult,” adds Francois. “We are committed to flying a system that will safely deliver our payload to the surface of the Mars in order to conduct its unique science mission.”
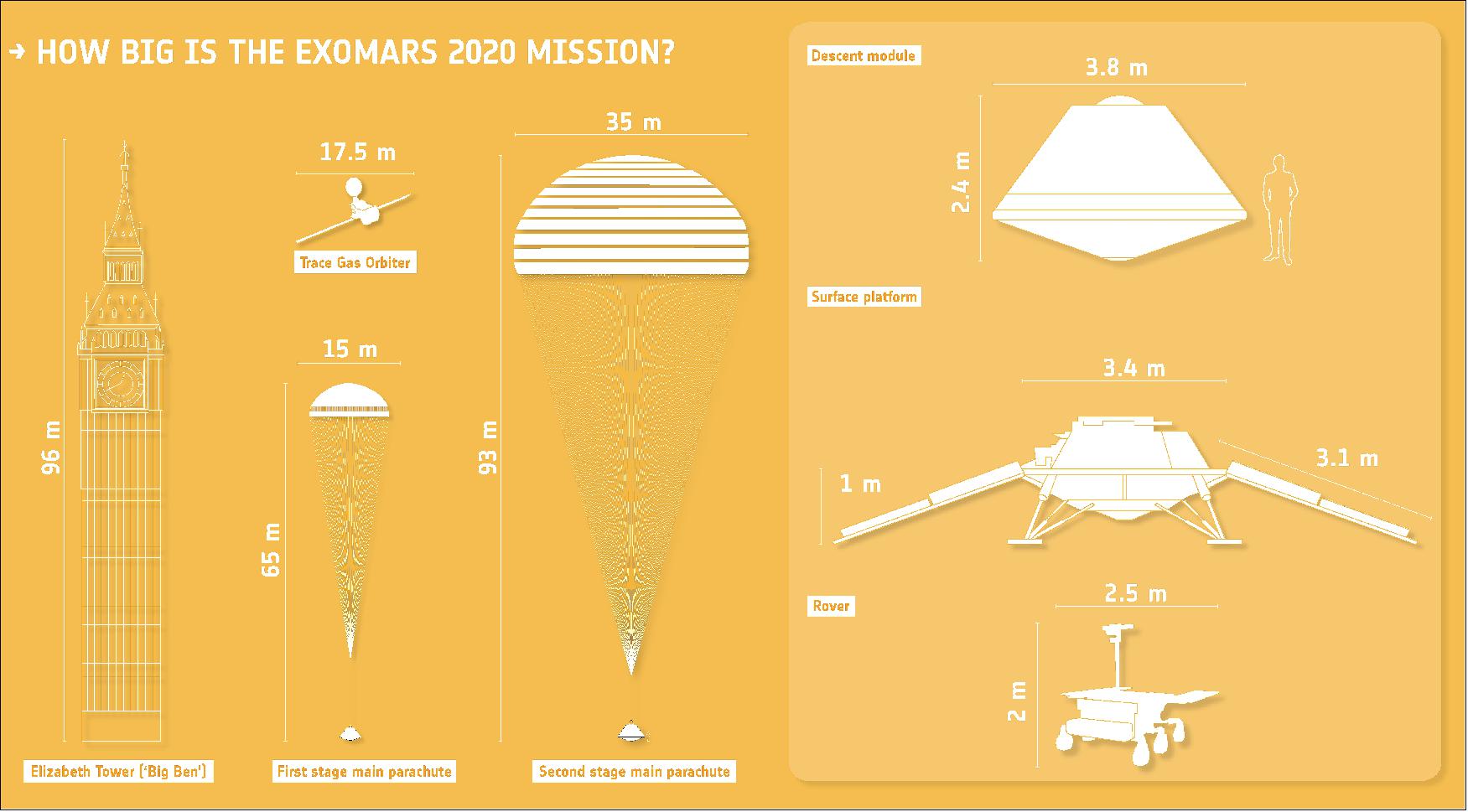
- After driving off the surface platform, Rosalind Franklin rover will explore the surface of Mars, seeking out geologically interesting sites to drill below the surface, to determine if life ever existed on our neighbor planet.
- The rover is currently nearing completion at Airbus Defence and Space, Stevenage, UK, and will soon begin its environmental test campaign at Airbus Toulouse, France. At the same time, the flight carrier module comprising the descent module and lander platform will begin its final round of testing at Thales Alenia Space, Cannes, France. The rover will be integrated into the spacecraft in early 2020.
- The ExoMars program is a joint endeavour between ESA and Roscosmos. In addition to the 2020 mission, it also includes the Trace Gas Orbiter (TGO) launched in 2016. The TGO is already both delivering important scientific results of its own and relaying data from NASA’s Curiosity Mars rover and Insight lander. It will also relay the data from the 2020 mission once it arrives at Mars in March 2021.
• July 22, 2019: An ambitious instrument for ESA’s ExoMars 2020 mission has passed its testing in conditions resembling those on the Red Planet. It will now be transported to Russia for its acceptance review, followed by integration onto the Kazachok Surface Platform, scheduled for launch this time next year. 44)
- At about 8 x 8 x 20 cm plus a trio of antennas, ESA’s LaRa (Lander Radioscience experiment) is a bit bigger than a 1 liter milk carton. But it functions as a high-performing transponder, tasked with maintaining an extremely stable direct radio-frequency link between Earth and Mars for a full martian year – two Earth years – once ExoMars has touched down.
- Proposed by the Royal Observatory of Belgium, LaRa has been developed through ESA’s PRODEX program – focused on developing science experiments for space – and funded by the Belgian Space Policy Office.
- The latest testing of LaRa took place in ESA’s Mechanical Systems Laboratory (MSL) at the Agency’s ESTEC technical heart in Noordwijk, the Netherlands. This is a small-scale version of the adjacent ESTEC Test Center, able to perform a wide range of space-simulating tests, but serving spacecraft instruments, subsystems or minisatellites rather than full-size missions.
- Following vibration testing on one of the MSL shaker to simulate the harsh conditions of launch, atmosphere re-entry, descent and Mars landing, LaRa was then placed inside a thermal vacuum chamber for nearly two weeks to perform functional testing in hot and cold conditions.
- It was at first placed in high vacuum to ‘outgas’ fumes that might otherwise pose problems in space and to test its behavior in conditions similar to that of the voyage to Mars. LaRa was then subjected to simulated Martian conditions, with 6 millibars of carbon dioxide added to the chamber, at the same time as the temperature was cycled up and down.
- LaRa’s electronic box will be kept warm by the ExoMars lander’s heater. LaRa’s antennas however are installed outside of this thermally controlled environment and will have to endure extreme temperature cycling: nights as cold as -90°C, with daytime reaching up to a relatively comfortable 10°C. The resulting novel antenna design was developed in cooperation between ESA and Université Catholique de Louvain.

- LaRa will receive an X-band radio signal from Earth that it will then relay back again. By carefully measuring slight Doppler shifts in this two-way signal over time, researchers will be able to identify tiny periodic shifts in the position of the Surface Platform over time, opening up an invaluable view into the Martian interior.
- “LaRa will reveal details of the planet’s internal structure, and allow precise measurements of its rotation and orientation,” comments Véronique Dehant of the Royal Observatory Belgium, the instrument’s principal investigator.
- “It will also detect variations in angular momentum due to redistribution of masses, such as the seasonal mass transfer in carbon dioxide when part of the atmosphere freezes into ice. Last but not least LaRa will also allow the accurate determining of the precise landing position.”
- As a terrestrial analogue, imagine a spinning egg – you can tell just by looking at its wobbled movement whether its inside is liquid or hard-boiled.
- But the challenge is maintaining the ultra-stable direct radio link during LaRa’s planned operating schedule of two 1-hour sessions per week, especially when Mars orbits to its maximum 401 million km away from Earth.
- On the Earthly side, we will be using giant 70 m class antennas of NASA’s Deep Space Network or the Russian equivalent at Kalyazin or Bear Lakes, to transmit the X-band radio signal towards Mars and to pick up its delayed replica relayed by LaRa and ‘Doppler-signed’ by Mars – All this with as low as 5 W of radio power generated by LaRa,” explains ESA microwave engineer Václav Valenta, managing the LaRa project.
- “But LaRa on Mars will need sufficient sensitivity to detect radio signal as low as few attowatts - trillionths (10-18) of a watt. When Mars and Earth come closer – at their nearest just 54.6 million km – then Europe’s Estrack ground stations will be able to close the link with LaRa as well.
- Such scenarios were successfully tested during two radio frequency compatibility test campaigns in ESA’s ESOC mission control center in Darmstadt, Germany.”

- The scanty Martian atmosphere is a complicating factor. On the plus side its presence enables convection to carry away waste heat. But while it is more than a hundred times thinner than Earth’s air, radio frequency operation within it still leaves a risk of ‘corona’ effects – ionization of local gases which can lead to interference and potentially harmful lightning-like discharge.
- “To eliminate any corona risk, LaRa was previously subjected to rigorous analysis and testing at ESA’s High Power Radio Frequency Laboratory in Valencia, Spain,” adds Václav.
- “It has also undergone testing inside ESTEC’s Maxwell chamber for electromagnetic compatibility, to check all its elements work properly together. Moreover, a dedicated shock model of LaRa was developed and tested at the ESTEC Test Center to verify the robustness of LaRa against mechanical shocks induced by the carrier module separation and heat-shield jettison.”
- Once testing of LaRa in the MSL was complete the instrument was moved to ESA’s Metrology Laboratory, for precision measurements of its surface flatness. It needs to be precise down to a scale of a few dozen micrometers – thousandths of a millimeter – for optimal fit and thermal contact with its lander interface, helping to maintain a good operational temperature on Mars.
- From ESTEC LaRa will be transported to the Space Research Institute of the Russian Academy of Sciences, IKI (Moscow), for final acceptance testing. It will then be moved to Cannes in France where it will be integrated on the Surface Platform with the rest of the lander and tested at the full-assembly level.
- “The opportunity to fly opened up at the end of 2015 and the actual developments towards the flight model started only one year later, so the LaRa team has had to work very hard to come to this point,” adds Václav.
• July 11, 2019: Exhibit 0102.226 may look like just a rock, but this dark and patchy mass is actually a piece of Mars, ejected when an asteroid or comet struck the Red Planet and sent chunks flying towards Earth. 45)
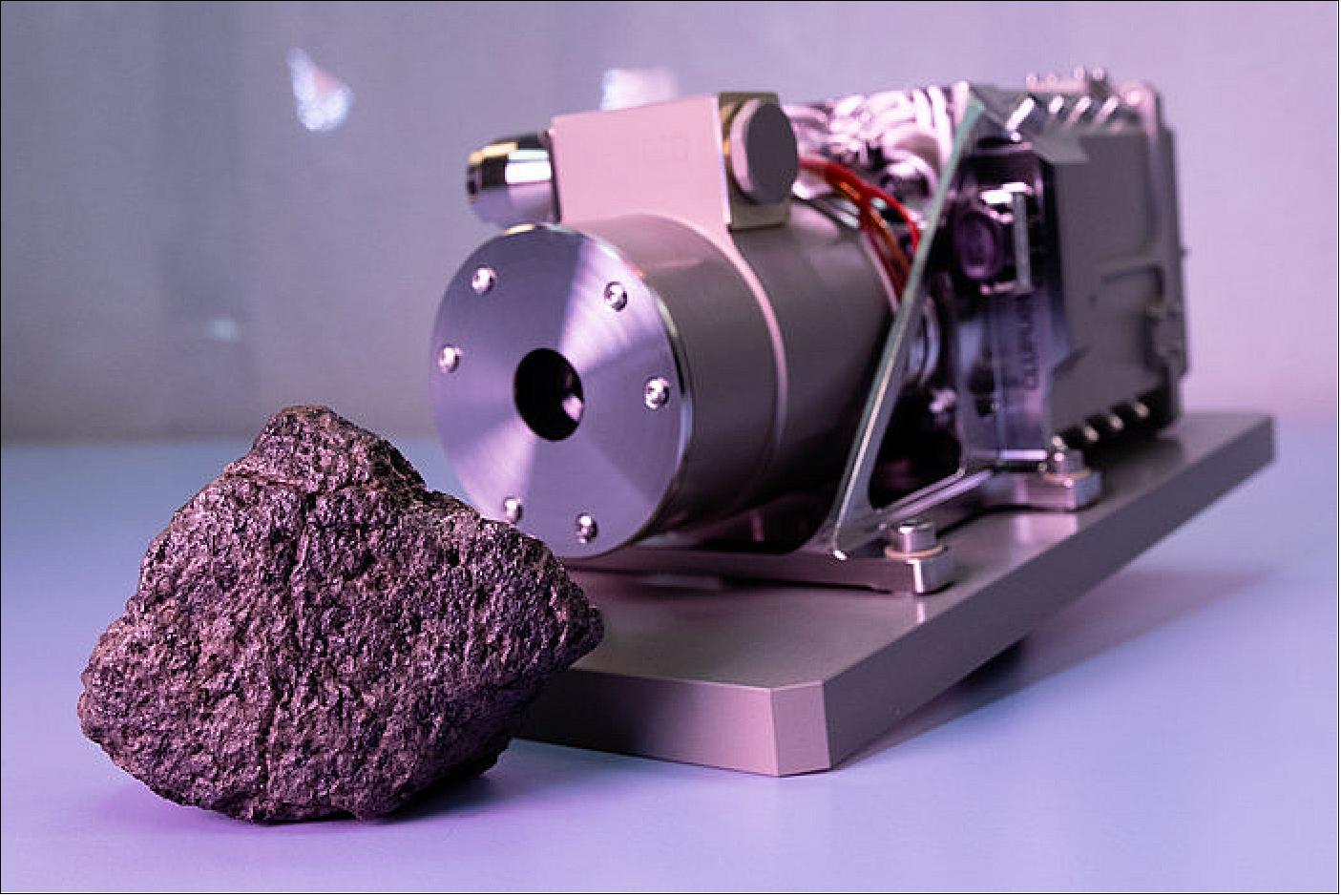
- Having survived its journey through Earth’s atmosphere, this alien rock was discovered in the Sayh al Uhaymir region of Oman, in 2001.
- The alien rock is at ESA’s ESTEC technology center in the Netherlands, on loan from the Natural History Museum in Bern, Switzerland, to support the calibration campaign for the ExoMars 2020 mission.
- Taking images at the tens of micrometers to centimeter scale, the camera will help scientists understand the environment in which martian rocks and materials formed.
Planetary Defence
- Of the 60,000 or so meteorites that have been discovered on Earth, 124 have been identified as having a martian origin.
- Just like Earth, Mars is vulnerable to space rocks that hurtle through the Solar System. Unlike Earth, its thin atmosphere means they often strike the surface intact. The Red Planet is also lacking in another vital area, with no inhabitants creating space agencies and methods of planetary defence!
- Asteroids with the potential to strike Earth are being monitored by ESA’s Near-Earth Object Coordination Center, which coordinates observations of small bodies in the solar system – such as asteroids, comets and even minor planets – to evaluate and monitor the threat posed by any that could come near Earth.
- ESA’s Planetary Defence Office conducts regular observation campaigns to look for risky space rocks, predicting their orbits, producing impact warnings when necessary and working towards mitigating the damage of, and even preventing altogether, an asteroid strike.
- CLUPI was built by an industrial team led by TASiCH in Zürich/Switzerland. The Principal Investigator is Jean-Luc Josset, from the Space Exploration Institute, Neuchatel/Switzerland.
• June 28, 2019: The full parachute system that will help deliver the ExoMars rover and a surface science platform to the martian surface has completed a full-scale high-altitude deployment sequence test, although unexpected damage to the main parachutes occurred. 46)
- Meanwhile, the main elements of the descent module hardware, including the heat shield that will protect the lander as it enters the atmosphere of Mars, have been delivered to Thales Alenia Space in Turin, Italy, this week. The European carrier spacecraft that will carry the mission from Earth to Mars, and the Russian landing platform named Kazachok already arrived in Italy earlier this year. The rover, named Rosalind Franklin, is currently being fitted with hardware and its scientific payload in Stevenage, UK. Once fully integrated, the hardware will be tested to ensure it is ready for the journey to space, and operations on Mars.
- As part of the planned upcoming testing, the parachute system will be adjusted to address a problem observed in the most recent high-altitude drop test, conducted on 28 May at the Swedish Space Corporation Esrange facility in Kiruna.
- The descent module needs two parachutes – each with its own pilot chute for extraction – to help slow the craft prior to landing. Following separation of the parachutes, the speed must be suitable for the braking engines to safely deliver the landing platform and the rover onto the surface of Mars. The entire sequence from atmospheric entry to landing takes just six minutes.
- Last year the second and largest main parachute was successfully tested in a low-altitude drop test from an altitude of 1.2 km, deployed by a helicopter. The parachute has a diameter of 35 m, which is the largest parachute ever to fly on a Mars mission. The most recent test took place from a height of 29 km with the aid of a stratospheric helium balloon, and focused on the deployment sequence of all four parachutes.
- A precise release of the drop test vehicle occurred at the planned altitude and the first pyrotechnic mortar activated normally to release the first pilot chute – which inflated correctly.
- The main parachute lid release mechanism worked and the first main parachute also inflated well, but several radial tears in the fabric were observed immediately following extraction from the main parachute bag, before the parachute experienced maximum load.
- The second pyrotechnic mortar also worked normally, ejecting the second pilot chute, which also inflated as expected. The second main parachute was extracted from its bag, but one radial tear was observed, again before reaching peak inflation loads.
- All the data onboard the drop test vehicle were recovered and analyzed. These data include acceleration, angular rates, magnetometer, GPS, and barometer data, together with camera footage.
- Detailed analysis of the telemetry parameters recorded during the test confirmed that a good level of the expected aerodynamic drag was nevertheless achieved in spite of the parachute tears. The overall descent time of the entire test was also close to prediction.
- The second parachute was quickly recovered and examined while it took a few days to identify and recover the first parachute that had travelled over 100 km following separation.
- “Hardware recovery was essential to help define necessary improvements prior to the next test,” says Francois Spoto, ExoMars team leader.
- “We will implement design improvements to the parachute bags to ensure smoother extraction of the parachute, as well as reinforcements to the parachute itself to limit tear propagation in case some would still occur. The complex process of folding and packing the parachutes and hundreds of lines will also be examined.”
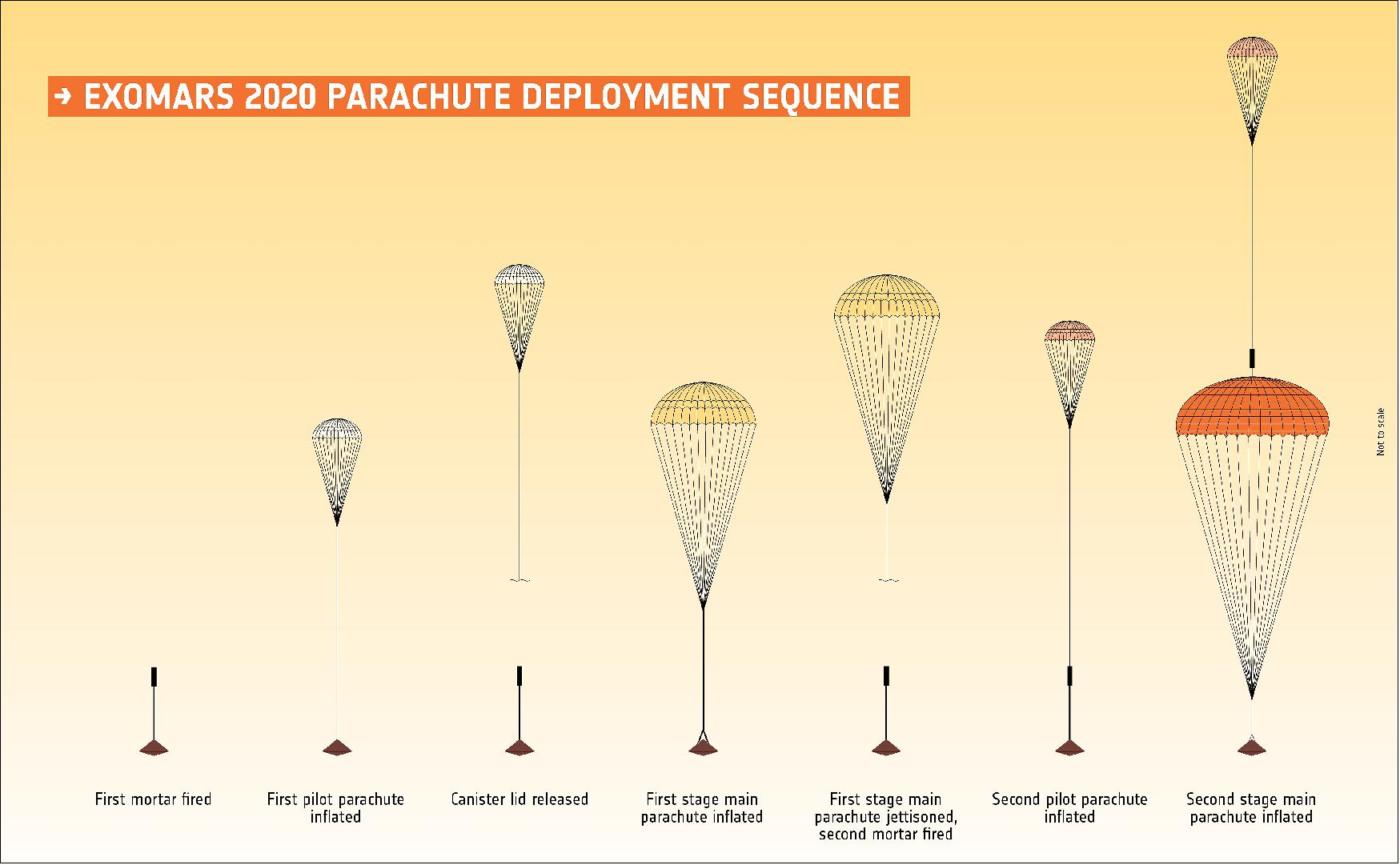
- Two further parachute tests are planned for later in 2019.
- “Although the overall test sequence was successful, we always expected to encounter some problems while testing such a complex system,” says Francois.
- “This is why we test, test and test again, to overcome potential weakness and make sure we have the strongest system flying to Mars. We are working harder than ever to keep on track for our launch window next year.”
- After driving off the surface platform, Rosalind Franklin rover will explore the surface of Mars, seeking out geologically interesting sites to drill below the surface, to determine if life ever existed on our neighbor planet.
- The ExoMars program is a joint endeavour between ESA and Roscosmos. In addition to the 2020 mission, it also includes the Trace Gas Orbiter (TGO) launched in 2016. The TGO is already both delivering important scientific results of its own and relaying data from NASA’s Curiosity Mars rover and Insight lander. It will also relay the data from the 2020 mission once it arrives at Mars.
• May 8, 2019: A key set of scientific instruments developed for the ExoMars rover Rosalind Franklin passed tests last month to ensure compatibility with the martian environment. 47)
- The rover’s Analytical Laboratory Drawer (ALD) flight model completed its thermal and vacuum sessions in Turin, Italy, at a Thales Alenia Space facility.
- The ExoMars rover will be the first of its kind to both roam the Mars surface and to study it at depth. Rosalind Franklin will drill down to two meters into the surface to sample the soil, analyze its composition and search for evidence of past – and perhaps even present – life hidden underground.
- A miniature laboratory inside the rover will analyze the samples and send data and images back to Earth to the scientific community, eager to learn more about our neighboring planet.
Under the Hood
- The ExoMars rover ALD system is designed by Thales Alenia Space in Turin and carries a set of four complex mechanisms developed by OHB in Munich, Germany, that can process and supply soil samples to three scientific instruments. Dedicated control electronics and a thermal control system will keep the system working and operating at the required temperatures while preserving the Mars samples and possible traces of organic molecules.
- The instruments will make a detailed study of the composition and chemistry of the soil samples collected by the rover’s drill. Following a process similar to a factory floor, once acquired from the drill, samples are dropped into a crushing station and pulverized. The fine powder is then dosed and moved on to the next area for precise distribution – either on a refillable container or in thumb-sized ovens where the specimens are analyzed.
- The ALD (Analytical Laboratory Drawer) houses three instruments to search for signs of life on Mars.
- The MicrOmega instrument uses visible and infrared light to characterize minerals in the samples; a Raman spectrometer (developed by INTA) uses a laser to identify mineralogical composition and lastly a combination of a Laser Desorption Mass Spectrometer and a Gas Chromatograph (part of the Mars Organics Molecule Analyser, MOMA) will study and identify soil chemistry. The most scientifically interesting samples, will be dosed into the MOMA ovens. The ALD has 31 ovens, where samples can be heated and the vapor and gases emitted will be analyzed with gas chromatography techniques to look for traces of organic compounds.
Roving Laboratory
- The instruments must work with the highest level of precision in an environment that is far from the pristine interiors common in laboratories on Earth. Rosalind Franklin can expect harsh days and nights on Mars with temperatures dropping to –120°C outside, and –60°C inside the rover.
- “The ALD behaved well with good results from both mechanisms and instruments during operations,” says Frédéric Didot, ESA ExoMars ALD system engineer.
- “The Mars environment tests were performed according to the project’s schedule thanks to the effort and dedication of industry and instrument teams supporting this amazing project.”
- The Exomars mission is in its final stages of preparation, the landing platform was delivered by Roscosmos’ prime contractor Lavochkin from Moscow to Turin in March. The ALD Flight Model having now passed these martian simulation tests is shipping to the UK for an arrival at an Airbus site in Stevenage on 8 May where it will be integrated with the rover.
Legend to Figure 69: Navigation cameras (at the top of the mast) and ‘localization’ cameras (at the base of the mast) are used to determine where the rover is and where it will move. High-resolution scientific cameras also sit at the top of the mast and will provide stereo and 3D imagery of the terrain around the rover. An infrared spectrometer located with the cameras will determine the major mineral composition of rocks, outcrops and soils.
A ground-penetrating radar unit situated at the rear of the rover will provide a detailed view of the Red Planet's shallow subsurface structure by sounding the upper layers of its crust and detecting subsurface water-ice. This will give three-dimensional geological context of the terrain covered by the rover.
Power is supplied to the rover by solar panels. These are folded during the journey to Mars and opened once the rover is on the surface. The rover is is designed to survive the cold martian nights with the help of batteries and heater units.
• April 4, 2019: The module that will carry the ExoMars rover and surface science platform from Earth to Mars arrived on 2 April at Thales Alenia Space in Turin, Italy, from OHB System in Bremen, Germany. 48)
- The carrier module also provides the communication link between Earth and the spacecraft, and will support navigation with star trackers and Sun sensors. It also carries propellant required for attitude control and maneuvers after launch and during cruise by means of its16 20-N thrusters that will use up to 136 kg of hydrazine propellant.
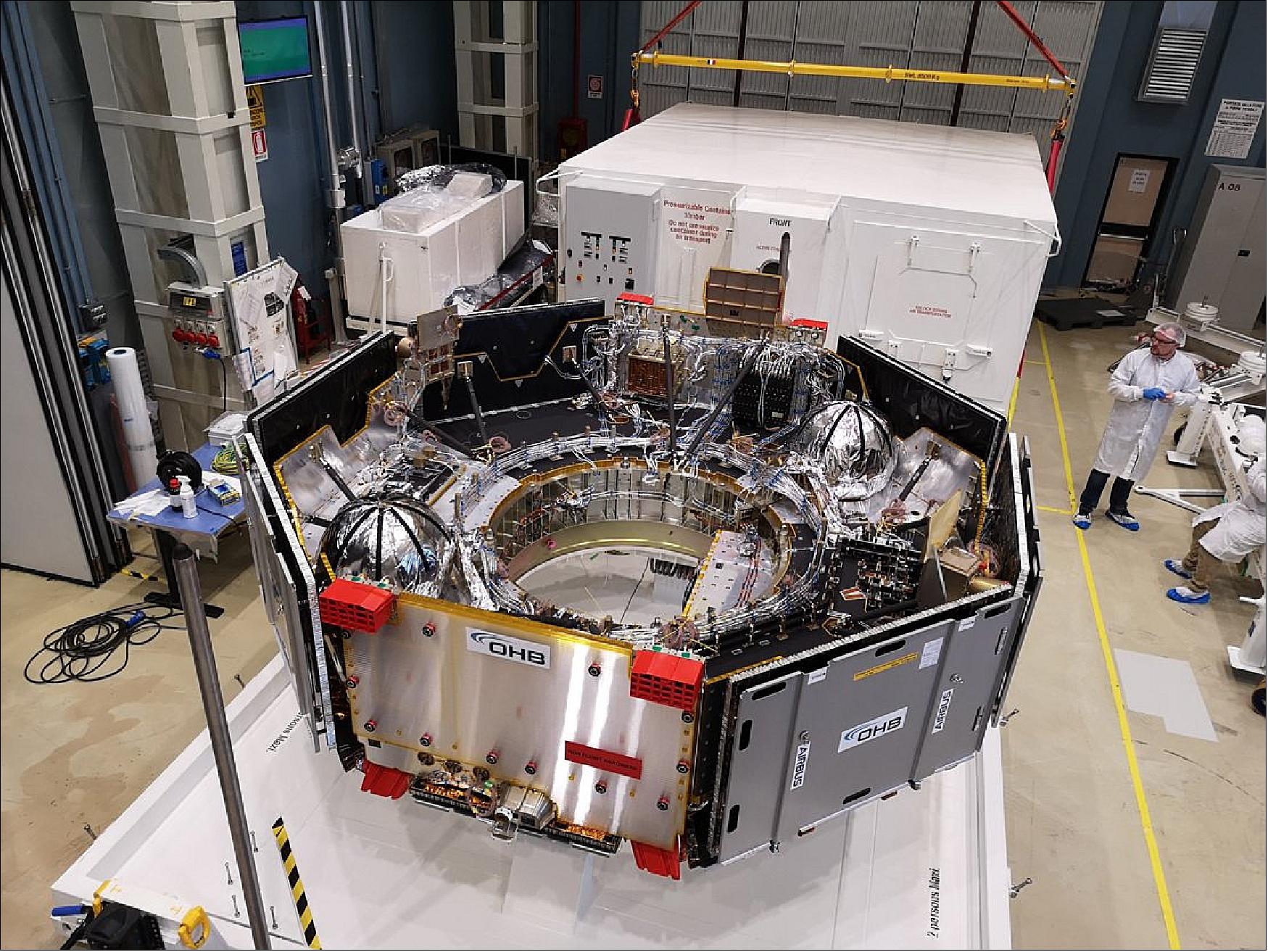
• March 26, 2019: The platform destined to land on the Red Planet as part of the next ExoMars mission being shipped to Europe for final assembly and testing. 49)

• March 21, 2019: The platform destined to land on the Red Planet as part of the next ExoMars mission has arrived in Europe for final assembly and testing – and been given a name. 50)
- An announcement was made by the Russian State Space Corporation Roscosmos of the platform's new name: ‘Kazachok’.
- In February, the rover was named ‘Rosalind Franklin’ after the prominent scientist behind the discovery of the structure of DNA. Now the surface platform also has a name. Kazachok literally means little Cossack, and it is a lively folk dance.
- Once on the martian surface, Rosalind the rover will drive off the Kazachok platform to perform scientific investigations. Kazachok will remain stationary to investigate the climate, atmosphere, radiation and possible presence of subsurface water in the landing site.

- Kazachok left Russia after being carefully packed to meet planetary protection requirements, making sure to not bring terrestrial biological contamination to Mars. It was shipped to Turin, Italy, on an Antonov plane along with ground support equipment and other structural elements.

- The Italian division of Thales Alenia Space will perform final assembly and testing of the mission in close cooperation with ESA.
- There will be more components arriving to Italy throughout the year, including avionics equipment, the carrier and rover modules and thermal protection systems for the landing platform.
- Several test campaigns with ExoMars models are running in parallel in preparation for launch and landing.
- Recent shock tests in Russia have successfully proved the mechanical compatibility between the spacecraft and the adapter for the Proton-M rocket that will set ExoMars on its way to Mars.
- The ExoMars teams have also just completed the egress and locomotion tests with a full-sized model of the rover in Zürich, Switzerland.
- There the rover drove off ramps and through all the terrain conditions that it might encounter on Mars: different types of soil, various obstacle shapes and sizes and all kind of slopes.
- “We have now a very challenging schedule of deliveries and tests both in Italy and France. The coordination between the Russian and European teams is key to timely reach the Baikonur Cosmodrome in 2020,” says François Spoto, ESA’s ExoMars team leader.
• March 13, 2019: Mars is a potential abode of past and perhaps even present-day life. Accordingly, international planetary protection regulations require any mission sent to the Red Planet to undergo rigorous sterilization, to prevent terrestrial microbes from piggybacking their way there. 51)
- The Lab’s Alan Dowson explains: “This is the ‘qualification model’ of the 35-m diameter main parachute for ExoMars 2020, basically a test version which allows us to finalize our sterilization procedures ahead of the flight model chute’s arrival.
- “This version has been threaded with thermal sensors, allowing us to see how long it takes to reach the required sterilization temperature in all parts of the folded parachute, even in the hardest to heat points. Our target was to sterilize at 125 °C for 35 hours and 26 minutes, and the oven took about 44 hours to reach that temperature to begin with.”
- The oven is part of the Lab’s 35 m2 ‘ISO Class 1’ cleanroom, one of the cleanest places in Europe. All the cleanroom’s air passes through a two-stage filter system. Anyone entering the chamber has to gown up in a much more rigorous way than a hospital surgeon, before passing through an air shower to remove any remaining contaminants.
- “If you imagine our clean room as being as big as the entire Earth’s atmosphere, then its allowable contamination would be equal to a single hot air balloon,” adds Alan. “Our ISO 1 rating means we have less than 10 dust particles measuring a tenth of one millionth of a meter in diameter per cubic meter of air.”
- The mostly nylon and Kevlar parachute, packed into an 80-cm diameter donut-shaped unit, was delivered by Italy’s Arescosmo company. This qualification model will now be sent back there for testing, to ensure this sterilization process causes no change to the parachute’s material properties.
- Alan explains: “We will receive the parachute flight model later this spring for the same sterilization process – identical to this version, except without any thermal sensors.”
- ExoMars’s smaller first stage 15-m diameter parachute has already gone through sterilization using the oven. This is the parachute that opens during initial, supersonic atmospheric entry, with the second, larger chute opening once the mission has been slowed to subsonic velocity.
- The Lab has also tackled a variety of ExoMars instruments and subsystems, but this second stage subsonic parachute is the single largest item to be sterilized. The sterilization process aims to reduce the overall mission ‘bioburden’ to a 10 thousandth of its original level.

• February 28, 2019: Rovers are versatile explorers on the surface of other planets, but they do need some training before setting off. A model of Rosalind Franklin rover that will be sent to Mars in 2021 is scouting the Atacama Desert, in Chile, following commands from mission control in the United Kingdom, over 11,000 km away. 52)
- The ExoFiT field campaign simulates ExoMars operations in every key aspect. During the trial, the rover drove from its landing platform and targets sites of interest to sample rocks in the Mars-like landscapes of the Chilean desert.
- ESA’s human and robotic exploration director, David Parker, explains “we call these tests ‘ExoFit’ - meaning ExoMars-like Field Testing. The results will help us prepare the real Rosalind Franklin rover for the challenge of safe operation far across the Solar System.”
- The team behind the exercise, a mix of scientists and engineers, is simulating all the challenges of a real mission on the Red Planet, including communication delays, local weather conditions and tight deadlines.
- “We make teleoperations as martian as possible,” explains Juan Delfa, ESA’s robotics engineer overseeing the activities.
- “We are continuously working against the clock as you need to take into account signals from Mars take between 4 and 24 minutes to arrive at Earth while blasts of wind might cover the rover’s solar panels with dust, and that we only have a few hours to decide what the rover should do next,” adds Juan.
- The campaign started on 18 February and will run until 1 March. This is the first time that ESA’s European Center for Space Applications and Telecommunications (ECSAT), in Harwell, UK, is acting as a mission control.
- With over 60 people from different space and scientific organizations involved, “it is all about getting the teams to practice with real mission issues. We are learning how to teleoperate a rover in the field and to make decisions in the most efficient way,” says Lester Waugh, ExoFiT mission manager from Airbus.
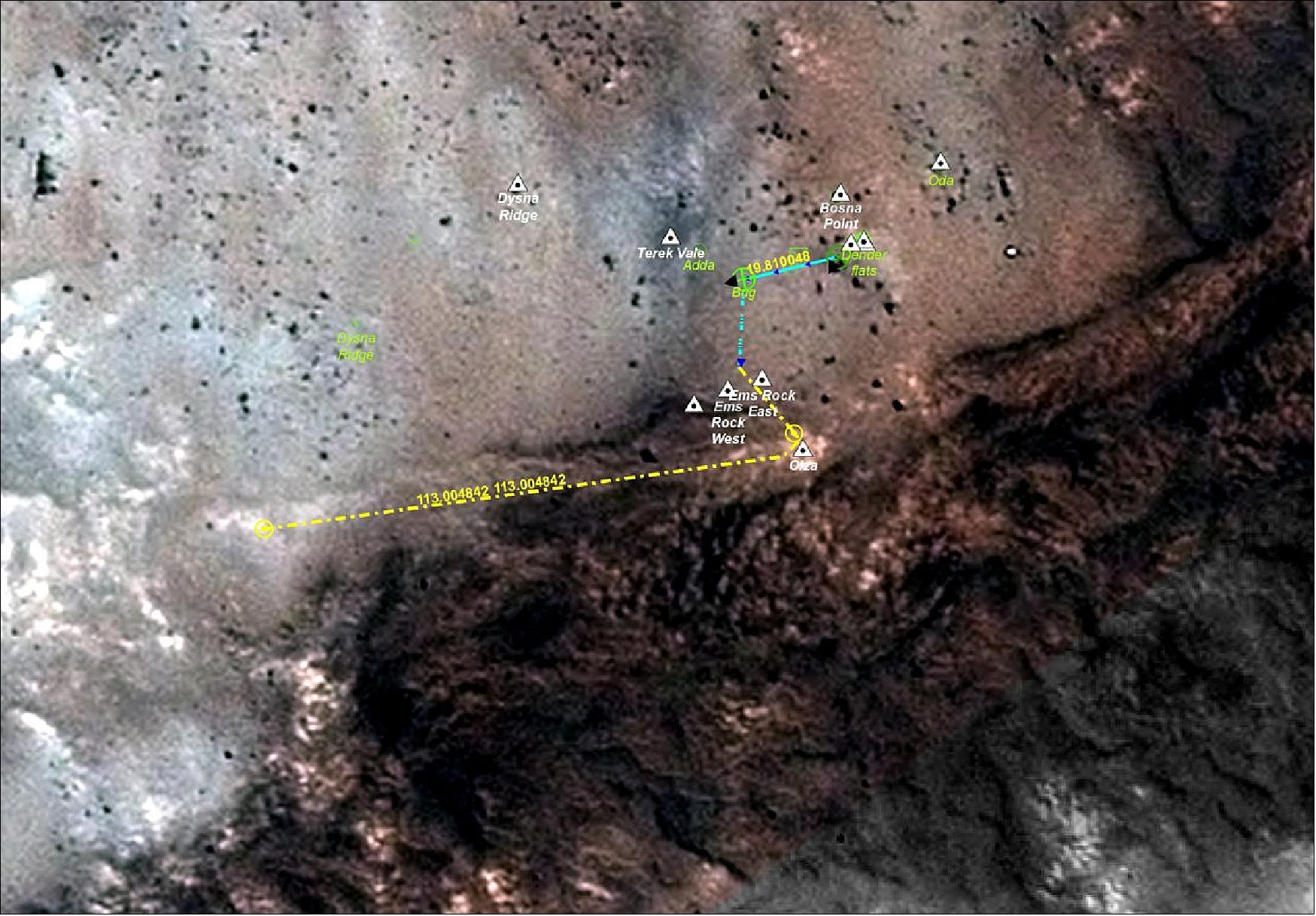

- The rover is equipped with a set of cameras and proxy instruments, such as a radar, a spectrometer and a drill, to replicate martian operations.
- As it departed from the ‘landing site’ in a remote barren area, the first thing this prototype of ExoMars did was share a panoramic image and its location coordinates with mission control.
• February 7, 2019: The ExoMars rover that will search for the building blocks of life on the Red Planet has a name: Rosalind Franklin. The prominent scientist behind the discovery of the structure of DNA will have her symbolic footprint on Mars in 2021. 53)
- A panel of experts chose ‘Rosalind Franklin’ from over 36 000 entries submitted by citizens from all ESA Member States, following a competition launched by the UK Space Agency in July last year.
- The ExoMars rover will be the first of its kind to combine the capability to roam around Mars and to study it at depth. The Red Planet has hosted water in the past, but has a dry surface exposed to harsh radiation today.
- The rover bearing Rosalind Franklin’s name will drill down to two meters into the surface to sample the soil, analyze its composition and search for evidence of past – and perhaps even present – life buried underground.
- “This name reminds us that it is in the human genes to explore. Science is in our DNA, and in everything we do at ESA. Rosalind the rover captures this spirit and carries us all to the forefront of space exploration,” says ESA Director General Jan Woerner.
- The name was revealed this morning in the ‘Mars Yard’ at Airbus Defence and Space in Stevenage, in the United Kingdom, where the rover is being built. ESA astronaut Tim Peake met the competition entrants who chose the winning name, and toured the facility with UK Science Minister Chris Skidmore.
- “This rover will scout the martian surface equipped with next-generation instruments – a fully-fledged automated laboratory on Mars,” says Tim. “With it, we are building on our European heritage in robotic exploration, and at the same time devising new technologies.”
- The rover will relay data to Earth through the ExoMars TGO (Trace Gas Orbiter), a spacecraft searching for tiny amounts of gases in the martian atmosphere that might be linked to biological or geological activity since 2016.
- Rosalind has already a proposed landing site. Last November a group of experts chose Oxia Planum near the martian equator to explore an ancient environment that was once water-rich and that could have been colonized by primitive life.
- The second part of the ExoMars program is ongoing.
- In Stevenage, UK, a rover is being built that will carry a drill and a suite of instruments dedicated to exobiology and geochemistry research. It will be the first mission to combine the capability to move across the surface and to study Mars at depth.
- The primary goal of the ExoMars program is to address the question of whether life has ever existed on the red planet.
- The first part of the program was launched in March 2016 with the Trace Gas Orbiter. The second part is planned for launch in 2020 and comprises the rover and surface science platform.
On our way to Mars, and back
- Looking beyond ExoMars, bringing samples back from Mars is the logical next step for robotic exploration. ESA is already defining a concept for a sample return mission working in cooperation with NASA.
- “Returning martian samples is a huge challenge that will require multiple missions, each one successively more complex than the one before,” says David Parker, ESA’s Director of Human and Robotic Exploration.
- “We want to bring the Red Planet closer to home. We want to delve into its mysteries and bring back knowledge and benefits to people on Earth. Returned planetary samples are truly the gift that keeps on giving – scientific treasure for generations to come,” he adds.
- Long-term planning is crucial to realize the missions that investigate fundamental science questions like could life ever have evolved beyond Earth?
- ESA has been exploring Mars for more than 15 years, starting with Mars Express and continuing with the two ExoMars missions, keeping a European presence at the Red Planet into the next decade.
• February 7, 2019: ExoMars is a joint endeavour between ESA and Roscosmos. The rover is part of the 2020 mission, landing on Mars with a surface science platform in 2021. 54)

• January 17, 2019: Navigation software destined for the ExoMars 2020 mission to the Red Planet has passed a rover-based driving test at ESA’s ‘Mars Yard’. 55)
- ESA’s ExoMars rover will drive to multiple locations and drill down to two meters below the surface of Mars in search of clues for past life preserved underground.
- A half-scale version of the ExoMars rover, called ExoMars Testing Rover (ExoTeR), maneuvered itself carefully through the red rocks and sand of the 9 x 9 m ‘Planetary Utilization Testbed’, nicknamed the Mars Yard, part of ESA’s Planetary Robotics Laboratory at ESTEC in the Netherlands.
- Carefully calculating its onward route, ExoTeR progressed at a rate of 2 m per minute – still several times faster than the actual ExoMars rover will drive, which will progress at 100 m per martian day.
- The two-day rover test was conducted by ESA robotic engineers, joined by a team from France’s space agency CNES in Toulouse. They have more than two decades of experience in autonomous navigation for planetary rovers, culminating in developing the ‘AutoNav’ suite of software that was doing the driving.
• November 27, 2018: The sun set on a week of trials for the ExoMars rover prototype named Charlie (in the foreground). The first of two field trials for the mission, known as ExoFiT, took place in the Tabernas desert in Spain between 13-26 October (Figure 81). 56)
- While Charlie was located in Spain, mission operators and instrument scientists were based over 1000 km away at mission control in Harwell, UK, near ESA’s ECSAT (European Center for Space Applications and Telecommunications), where ExoFit was managed. The distance was crucial as teams operating a rover on the Martian surface must contend with infrequent communication possibilities and must run science operations with what little information they have. The rover itself is designed to carry out activities such as a traverse or observations in between communication blackouts as well as send data to Earth in preparation for the next martian day.
- During the 10-day trial, the team practised driving the rover off its landing platform (in the background of this image), targeting sites of interest, and sampling rocks. Decisions were made based on data transmitted by the rover together with maps of the terrain.
- Naturally, the team encountered technical difficulties, to be expected in real test conditions. Rainfall disrupted events and forced the team to adapt and optimize their time. In the second week, the team managed to finish activities scheduled for two martian days in a single day.
- The scenarios in general tested the rover’s radar instrument, close-up imager, panoramic mast imager and drill, with more specific tests aimed at replicating what will be performed on the martian surface. Once on the Red Planet, the rover drill beneath the surface to look for signs of life.
- A lot is learned during these simulation studies to fine-tune equipment and train mission specialists. The issues encountered in the field trial will be addressed and tested again in a second field campaign introducing more complex autonomous rover operations.
- Set for February 2019, the second field trial will take place in the Atacama desert of Chile. Atacama is one of the most similar terrains on Earth to Mars, with the added benefit of drier weather and the nearby European Southern Observatory’s Paranal Observatory over the Tabernas desert.
- The operational challenges observed provide valuable inputs for the ExoMars rover and other planetary rovers such as the Sample Fetch Rover of the NASA-ESA Mars Sample Return mission. Currently in the concept phase, ESA is working with international partners to achieve its vision of Europe’s expanding role in space exploration.
• November 9, 2018: The ExoMars Landing Site Selection Working Group has recommended Oxia Planum as the landing site for the ESA-Roscosmos rover and surface science platform that will launch to the Red Planet in 2020. - The proposal will be reviewed internally by ESA and Roscosmos with an official confirmation expected mid-2019. 57)
- At the heart of the ExoMars program is the quest to determine if life has ever existed on Mars, a planet that has clearly hosted water in the past, but has a dry surface exposed to harsh radiation today.
- While the ExoMars TGO (Trace Gas Orbiter), launched in 2016, began its science mission earlier this year to search for tiny amounts of gases in the atmosphere that might be linked to biological or geological activity, the rover will drive to different locations and drill down to two meters below the surface in search of clues for past life preserved underground. It will relay its data to Earth through the Trace Gas Orbiter.
- Both landing site candidates – Oxia Planum and Mawrth Vallis (Figure 84) – preserve a rich record of geological history from the planet’s wetter past, approximately four billion years ago. They lie just north of the equator, with several hundred kilometers between them, in an area of the planet with many channels cutting through from the southern highlands to the northern lowlands. Since life as we know it on Earth requires liquid water, locations like these include many prime targets to search for clues that may help reveal the presence of past life on Mars.
- “With ExoMars we are on a quest to find biosignatures. While both sites offer valuable scientific opportunities to explore ancient water-rich environments that could have been colonized by micro-organisms, Oxia Planum received the majority of votes,” says ESA’s ExoMars 2020 project scientist Jorge Vago. “An impressive amount of work has gone into characterizing the proposed sites, demonstrating that they meet the scientific requirements for the goals of the ExoMars mission. Mawrth Vallis is a scientifically unique site, but Oxia Planum offers an additional safety margin for entry, descent and landing, and for traversing the terrain to reach the scientifically interesting sites that have been identified from orbit.”
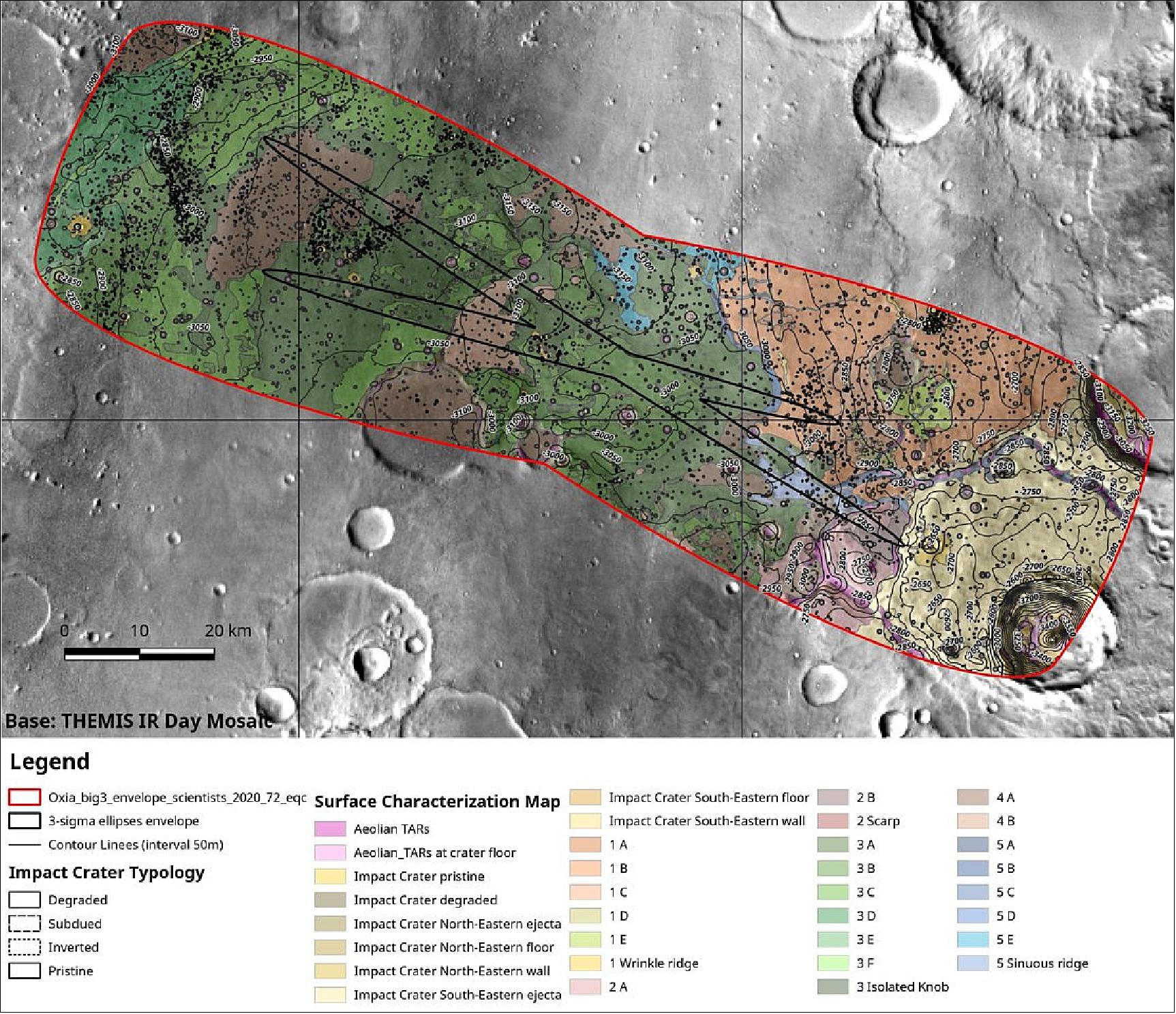
Legend to Figure 82: The narrow ellipses with the black outline mark the most likely landing zones for the extreme case of the very beginning and end of the launch window respectively (the launch dictates the arrival inclination and there are other scenarios in between). The central touchdown point in Oxia Planum is the same regardless of the actual launch date in the 25 July–13 August 2020 launch window. -The background image is from the Thermal Emission Imaging System instrument on NASA’s Mars Odyssey orbiter.
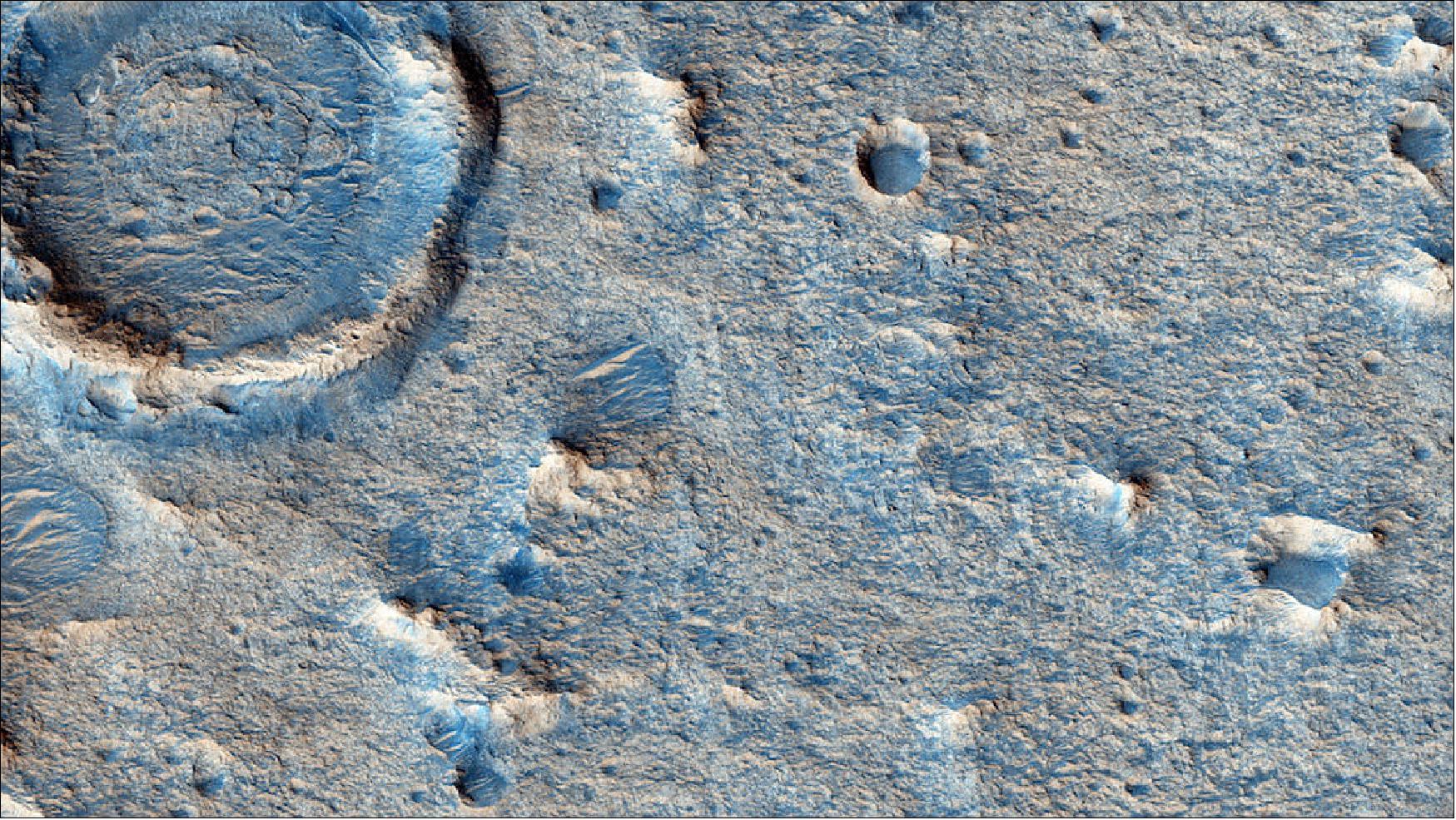
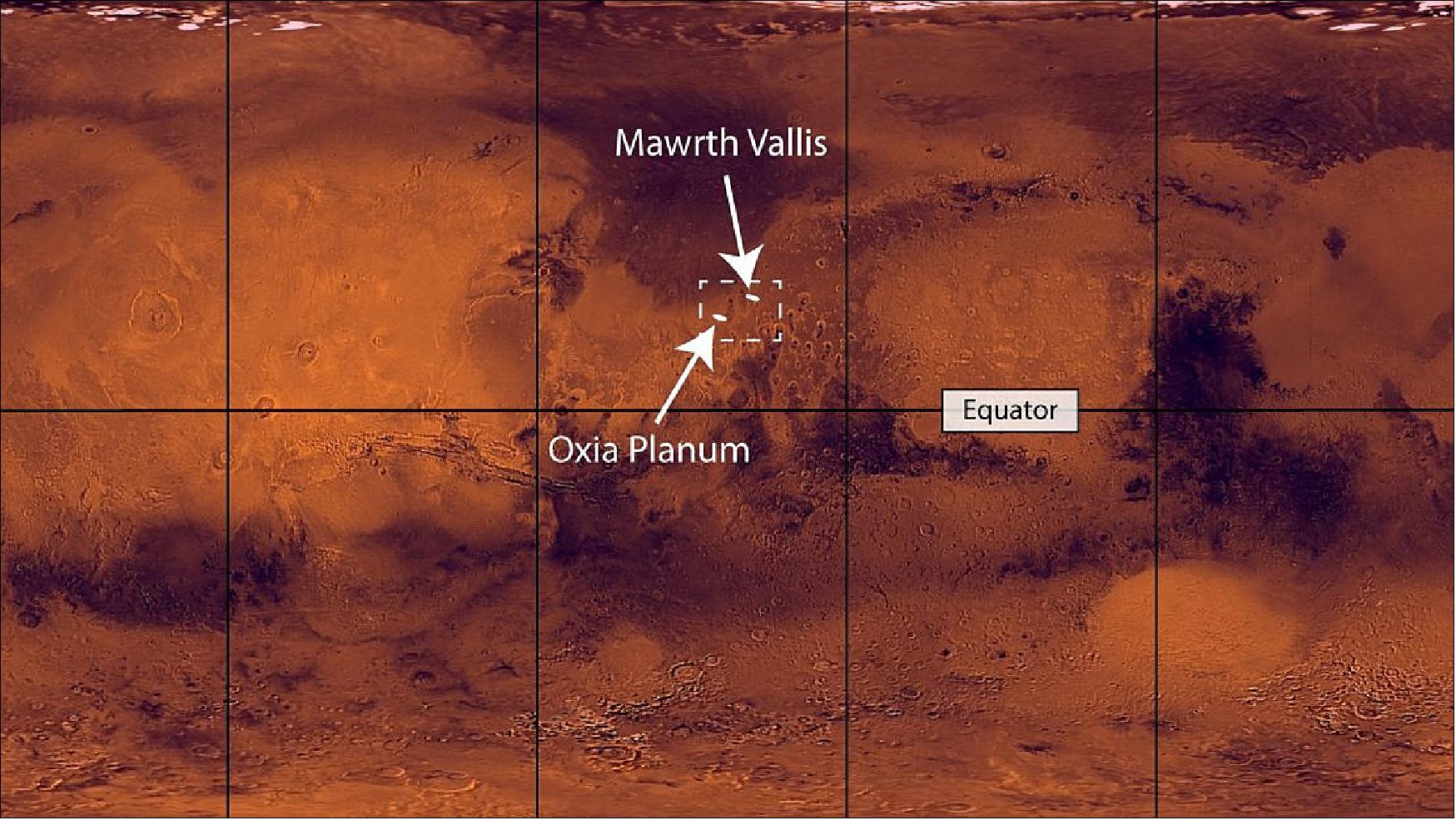
- The Landing Site Selection Working Group also emphasized that the discoveries generated during the landing site selection process are essential to guide the science operations of the ExoMars rover.
- The recommendation was made today following a two-day meeting held at the National Space Centre in Leicester, UK, which saw experts from the Mars science community, industry, and ExoMars project present and discuss the scientific merits of the sites alongside the engineering and technical constraints.
- The quest to find the perfect landing site began almost five years ago, in December 2013, when the science community was asked to propose candidate locations. Eight proposals were considered in the following April, with four put forward for detailed analysis in late 2014. In October 2015, Oxia Planum was identified as one of the most compatible sites with the mission requirements – at that time with a 2018 launch date in mind – with a second option to be selected from Aram Dorsum and Mawrth Vallis. In March 2017, the down-selection identified Oxia Planum and Mawrth Vallis as the two candidates for the 2020 mission, with both undergoing a detailed evaluation over the last 18 months.
- On the technical side, the landing site must be at a suitably low elevation level, so that there is sufficient atmosphere and time to help slow the landing module’s parachute descent. Then, the 120 x 19 km landing ellipses should not contain features that could endanger the landing, the deployment of the surface platform ramps for the rover to exit, and the subsequent driving of the rover. This means scrutinizing the region for steep slopes, loose material and large rocks.
- On the science side, the analysis had to identify sites where the rover could use its drill to retrieve samples from below the surface, and to define possible traverses it could make up to 5 km from its touchdown point in order to reach the maximum number of interesting locations.
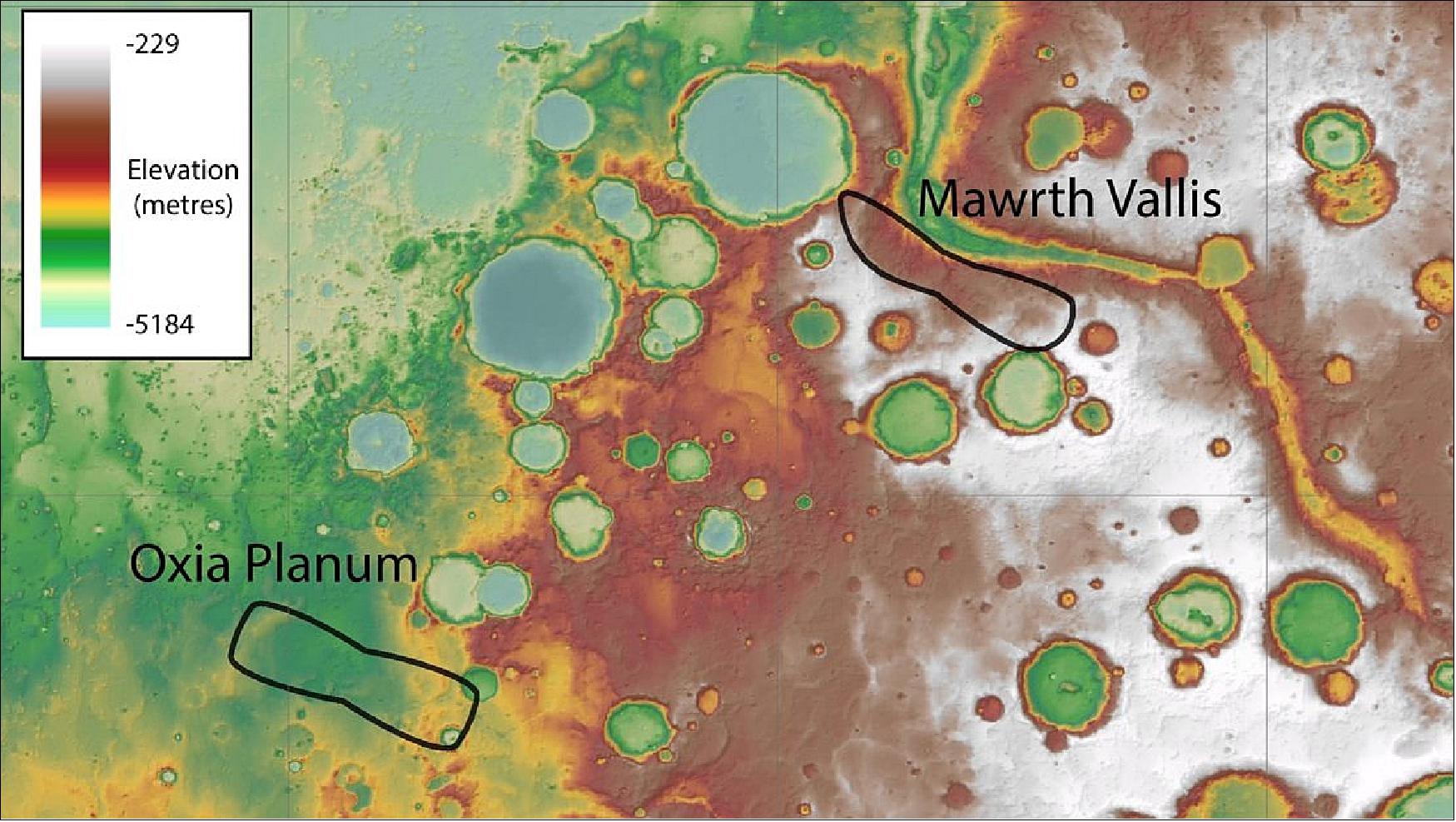
Legend to Figure 85: Both landing site candidates lie close to the transition between the cratered northern highlands and the southern lowlands of Mars. They lie just north of the equator, in a region with many channels cutting through from the southern highlands to the northern lowlands. As such, they preserve a rich record of geological history from the planet’s wetter past, billions of years ago.
• September 27, 2018: Thales Alenia Space in the UK achieves the major milestone of delivering its IMU Flight Models to Airbus Defence and Space in UK for integration with the ExoMars Rover. Exomars is a project under international cooperation between ESA (European Space Agency) and Roscosmos (Russian Space Agency), Thales Alenia Space is the prime contractor for the global program. 58)
- The IMU (Inertial Measurement Unit) designed by Thales Alenia Space in the UK has been delivered for integration in to the ExoMars Rover mission. The IMU enables the Rover’s navigation during its mission, providing critical data on its orientation, speed and direction.
- Designed, built and tested in Thales Alenia Space’s advanced facilities in Bristol, UK, these next generation IMU’s utilize a new modular concept that provides 3 axis orientation, angular rate, velocity and acceleration measurement.
• June 27, 2018: A ground penetrating radar antenna for ESA’s ExoMars 2020 rover being pre-cleaned in an ultra-cleanroom environment in preparation for its sterilization process, in an effort to prevent terrestrial microbes coming along for the ride to the red planet. 59)
- Part of the Agency’s Life, Physical Sciences and Life Support Laboratory based in its Netherlands technical center, This 35 m2 ‘ISO Class 1’ cleanroom is one of the cleanest places in Europe. It is equipped with a dry heat sterilizer used to reduce the microbial ‘bioburden’ on equipment destined for alien worlds.

- “After pre-cleaning and then the taking of sample swabs, the antenna was placed into our dry heat sterilizer, to target the required 99.9% bioburden reduction to meet ExoMars 2020’s cleanliness requirements,” explains technician Alan Dowson.
- To check the effectiveness of this process, the swabs are subjected to a comparable heat shock and then cultivated for 72 hours, to analyze the number of spores and bacteria able to survive. The viable bioburden is then calculated for the surface area of the WISDOM antenna. If this level is below the mission’s maximum then it is cleared for delivery.”
- All the cleanroom’s air passes through a two-stage filter system. Anyone entering the chamber has to gown up in a much more rigorous way than a hospital surgeon, before passing through an air shower to remove any remaining contaminants.
- The chamber’s cleanliness is such that it contains less than 10 particles smaller than a thousandth of a millimeter per cubic meter. A comparable sample of the outside air could well contain millions.
- By international planetary protection agreement, space agencies are legally required to prevent terrestrial microbes hitchhiking to other planets and moons in our Solar System where past or present alien life is a possibility.
• May 29, 2018: A representative model of the ExoMars rover that will land on Mars in 2021 is beginning a demanding test campaign that will ensure it can survive the rigors of launch and landing, as well as operations under the environmental conditions of Mars. 60)
- The ExoMars rover will be the first of its kind to drill below the surface – down to 2 m – and determine if evidence of life is buried underground, protected from the destructive radiation that impinges the surface today.
- Like any space mission, the rover’s mechanical structure, along with its electrical and thermal components and its interfaces with the scientific instruments, have to be tested to check they can survive their journey in space and operations at the destination.
- As such the rover ‘structural and thermal model’ was recently transferred from Airbus Defence and Space in Stevenage, UK, to the Airbus site in Toulouse, France. This week, the model will be shaken on a vibration table to ensure it can survive the intense juddering as the Proton rocket carries it into space.
- Furthermore, the rover model will be subjected to the shocks associated with entering another planet’s atmosphere at high speed and as parachutes open, and finally the touchdown onto the Red Planet’s surface.
- Two months of thermal tests will follow under Mars atmosphere conditions, to qualify the rover for being able to withstand the frigid temperatures and large daily temperature variations on Mars.
- The tests will be conducted in a chamber to simulate the low atmospheric pressure of Mars – less than 1% of Earth’s average sea level pressure – and its carbon dioxide-rich atmosphere. The rover will also need to operate at temperatures down to –120ºC. A closed compartment inside the rover, where martian soil samples will be analyzed, will be thermally controlled to maintain temperatures between +20ºC and –40ºC.
- The current test campaign is expected to last until the beginning of August 2018. The rover model will then move to Lavochkin, Moscow, where it will be sealed inside a replica descent module and again subjected to vibration, shock and thermal tests.
- Another test model will soon start an eight month-long campaign focusing on the rover’s movements and navigation over a variety of different ground types, ranging from fine-grained soil to larger boulders.
- The mission will travel to Mars inside an aeroshell, with the rover mounted on a surface science platform. Once safely delivered to the Red Planet’s surface, the landing platform will deploy its solar panels and ramps, and within a few days the rover will drive off the platform and begin its exciting exploration of Mars.
- “This campaign kicks off a series of tests that will verify the mechanical and thermal design of the ExoMars rover, essential preparation that brings us a step closer to roving on the Red Planet,” says Pietro Baglioni, ESA ExoMars rover team leader.
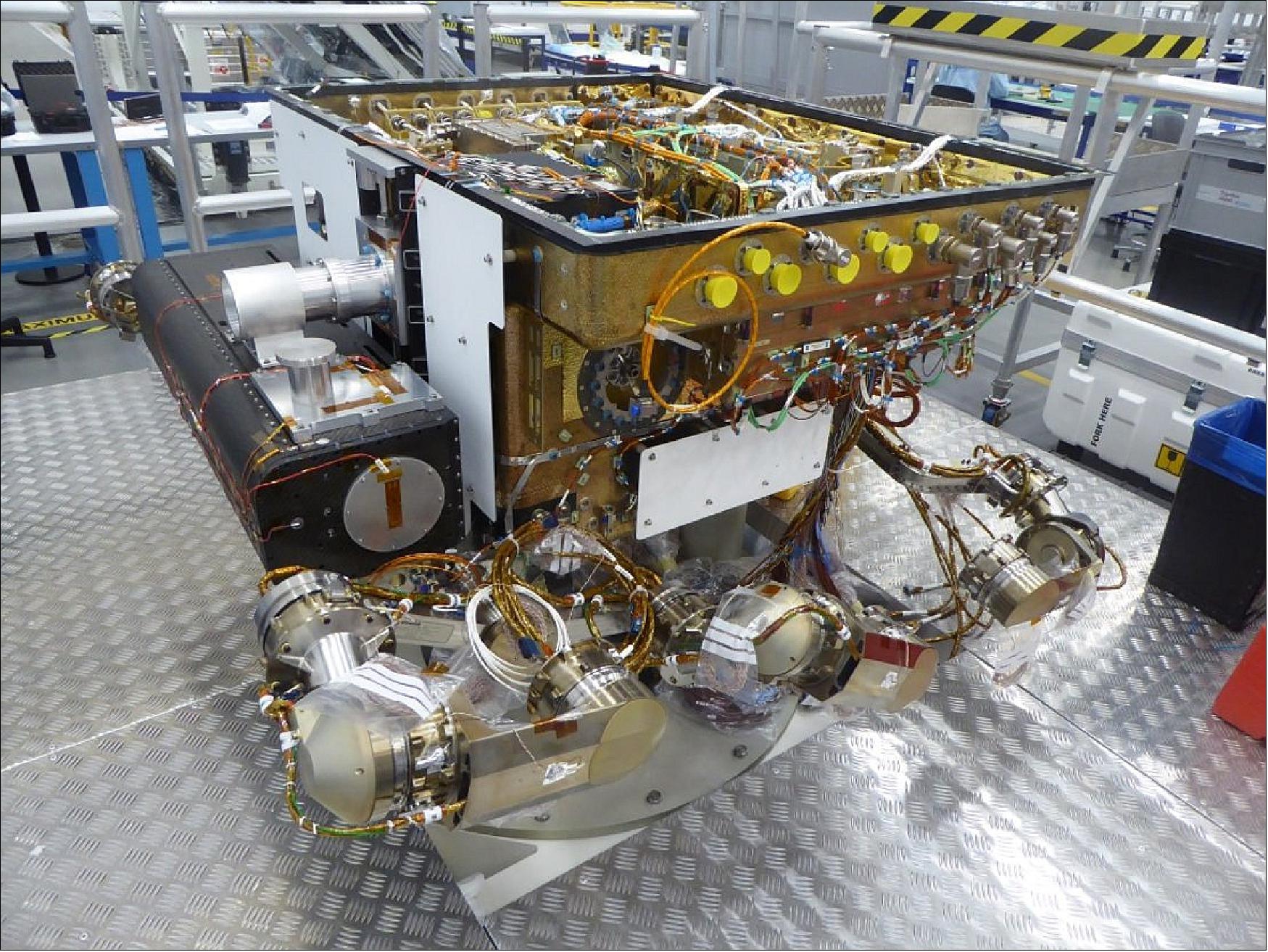
ExoMars 2020 Surface Platform Payloads
The ExoMars 2020 mission will have two science elements that land on Mars: a rover and a surface platform. 61)
The rover will leave the surface platform and travel across the surface of Mars to search for signs of well-preserved organic material, particularly from the early period of the planet. The surface platform, which is the responsibility of Roscosmos and the Space Research Institute of Russian Academy of Sciences (IKI), will remain stationary and will investigate the surface environment at the landing site. The set of sensors and instruments on the surface platform will operate during its nominal mission lifetime of one Earth year.
The main science priorities for the surface platform are context imaging of the landing site, long-term climate monitoring, and atmospheric investigations.
Sensors and instruments on the surface platform will also be used to study the subsurface water distribution at the landing site, to investigate the exchange of volatiles between the atmosphere and the surface, to monitor the radiation environment and compare it with measurements made with the radiation dosimeter on the FREND instrument (on the ExoMars 2016 Trace Gas Orbiter), and to carry out geophysical investigations of the planet’s internal structure.
In November 2015, ESA approved the selection of six European elements. This includes two European-led instruments, and four sensor packages to be included in two Russian-led instruments.
The two European-led instruments proposed are the LaRa (Lander Radioscience) experiment and the HABIT (Habitability, Brine Irradiation and Temperature) package.
LaRa will reveal details of the internal structure of Mars, and will make precise measurements of the rotation and orientation of the planet by monitoring two-way Doppler frequency shifts between the surface platform and Earth. It will also be able to detect variations in angular momentum due to the redistribution of masses, such as the migration of ice from the polar caps to the atmosphere.
HABIT will investigate the amount of water vapor in the atmosphere, daily and seasonal variations in ground and air temperatures, and the UV radiation environment.
The four European sensor packages in the two Russian-led instruments will monitor pressure and humidity, UV radiation and dust, the local magnetic field and plasma environment.
The surface platform will have a mass of 827.9 kg, including a scientific payload of 45 kg. The instruments are listed in Table 1.
Instrument | PI (Principal Investigator) |
LaRa (Lander Radioscience experiment) | PI: V. Dehant (Royal Observatory Belgium) |
HABIT (Habitability, brine irradiation and temperature package) | PI: F.J. Martin-Torres (Luleå University of Technology, Sweden) |
METEO M (Meteorological package) | PI: A. Lipatov (IKI, Russia) |
METEO-P, METEO-H (part of the METEO instrument) | Pressure and humidity sensors. |
RDM (Radiation and Dust sensors), (part of the METEO package) | PI: I. Arruego (Instituto Nacional de Técnica Aeroespacial (INTA), Spain) |
AMR (Anisotropic magneto-resistance sensor to measure magnetic fields) | PI: M. Diaz Michelena, INTA, Spain) |
MAIGRET (Magnetometer) | PI: A. Skalsky (IKI, Russia) |
WAM (Wave Analyzer Module), (part of the METEO instrument) | PI: O. Santolik (Institute of Atmospheric Physics, Czech Republic) |
TSPP (Set of cameras to characterize the landing site environment) | PI: I. Polyanskiy (IKI, Russia) |
BIP (Instrument interface and memory unit) | PI: K. Anufreychik (IKI, Russia) |
FAST (IR Fourier spectrometer to study the atmosphere) | PI: O. Korablev (IKI, Russia) |
ADRON-EM (Active neutron spectrometer and dosimeter), | PI: O. Mitrofanov (IKI, Russia) |
M-DLS (Multi-channel Diode-Laser Spectrometer for atmospheric investigations) | PI: I. Vinogradov (IKI, Russia) |
PAT-M (Radio thermometer for soil temperatures (down to 1-m depth)) | PI: D. Skulachev (IKI, Russia) |
Dust Suite (Dust particle size, impact, and atmospheric charging instrument suite) | PI: Zakharov (IKI, Russia) |
SEM (Seismometer) | PI: A. Manukin (IKI, Russia) |
MGAP (Gas chromatography-mass spectrometry for atmospheric analysis) | PI: M. Gerasimov (IKI, Russia) |
ExoMars 2022 Rover Payloads (ISEM, Ma_MISS, ADRON-RM, CLUPI, MOMA, MicrOmega, PanCam,LRS, WISDOM)
The ExoMars rover will be equipped with a drill to collect material from outcrops and at depth down to 2 m. This subsurface sampling capability will provide the best chance yet to gain access to chemical biosignatures. Using the powerful Pasteur payload instruments, the ExoMars science team will conduct a holistic search for traces of life and seek corroborating geological context information. 62) 63)
ISEM (Infrared Spectrometer for ExoMars)
ISEM s a pencil-beam infrared spectrometer that will measure reflected solar radiation in the near infrared range for context assessment of the surface mineralogy in the vicinity of the ExoMars rover. The instrument will be accommodated on the mast of the rover and will be operated together with the panoramic camera (PanCam), high-resolution camera (HRC). ISEM will study the mineralogical and petrographic composition of the martian surface in the vicinity of the rover, and in combination with the other remote sensing instruments, it will aid in the selection of potential targets for close-up investigations and drilling sites. Of particular scientific interest are water-bearing minerals, such as phyllosilicates, sulfates, carbonates, and minerals indicative of astrobiological potential, such as borates, nitrates, and ammonium-bearing minerals. The instrument has an ~1° field of view and covers the spectral range between 1.15 and 3.30 µm with a spectral resolution varying from 3.3 nm at 1.15 µm to 28 nm at 3.30 µm. The ISEM optical head is mounted on the mast, and its electronics box is located inside the rover's body. The spectrometer uses an acousto-optic tunable filter and a Peltier-cooled InAs detector. The mass of ISEM is 1.74 kg, including the electronics and harness. 64)
This instrument will be a mast-mounted infrared spectrometer, designed to determine the major mineral composition of distant rocks, outcrops, and soils. ISEM will be used to help scientists decide which surface targets the ExoMars Rover should approach for a more detailed investigation. 65)
ISEM is mounted on the Rover's mast together with the PanCam High-Resolution Camera (HRC) and Wide Angle Cameras (WAC). ISEM can be pointed to the desired direction in azimuth and elevation by means of the mast's pan and tilt mechanism. During a typical operation, the PanCam WAC, which has a field-of-view of 37° x 37°, will image a large panorama, while the PanCam HRC, with a field-of-view of 5° x 5°, will image a few targets within this panorama at high resolution. At the same time, ISEM, which has a field-of-view of 1°, will measure the infrared characteristics of these same targets by recording the spectra of solar light reflected from the planet's surface and modified by absorption and scattering in the atmosphere. Using the combined visual plus spectroscopic characterization, the science team on Earth will be able to help plan Rover operations by choosing the most promising targets for drilling.
The spectrometer will also be used to identify and map the distribution of rocks that have had a change in composition caused by chemical weathering due to interaction with water-bearing ices, liquids, and vapors. This process is known as aqueous alteration. Of particular interest are measurements that will allow scientists to distinguish between various classes of silicates, oxides, hydrated minerals and carbonates.
The main science objectives of ISEM are:
• To search for and study minerals bearing hydroxide (OH) or water (H2O)
• To carry out a geological investigation and study of minerals and rocks in the thin uppermost layer of the martian surface
• To identify and map the distribution of any aqueous alteration products on the landing site
• To perform a real-time assessment of the composition of the surface in selected areas, to support the identification and selection of the most promising drilling sites
• To study variations of the properties of atmospheric dust and of the gaseous composition of the atmosphere, in as far as this is possible with limited number of observation cycles.
Ma_MISS (Mars Multispectral Imager for Subsurface Studies)
The Ma_MISS experiment is the visible and near infrared (VNIR) miniaturized spectrometer hosted by the drill system of the ExoMars 2020 rover. Ma_MISS will perform IR spectral reflectance investigations in the 0.4–2.2 µm range to characterize the mineralogy of excavated borehole walls at different depths (between 0 and 2 m). The spectral sampling is about 20 nm, whereas the spatial resolution over the target is 120 µm. Making use of the drill's movement, the instrument slit can scan a ring and build up hyperspectral images of a borehole. The main goal of the Ma_MISS instrument is to study the martian subsurface environment. Access to the martian subsurface is crucial to our ability to constrain the nature, timing, and duration of alteration and sedimentation processes on Mars, as well as habitability conditions. Subsurface deposits likely host and preserve H2O ice and hydrated materials that will contribute to our understanding of the H2O geochemical environment (both in the liquid and in the solid state) at the ExoMars 2020 landing site.
The Ma_MISS spectral range and sampling capabilities have been carefully selected to allow the study of minerals and ices in situ before the collection of samples. Ma_MISS will be implemented to accomplish the following scientific objectives: (1) determine the composition of subsurface materials, (2) map the distribution of subsurface H2O and volatiles, (3) characterize important optical and physical properties of materials (e.g., grain size), and (4) produce a stratigraphic column that will inform with regard to subsurface geological processes. The Ma_MISS findings will help to refine essential criteria that will aid in our selection of the most interesting subsurface formations from which to collect samples. 66)
Located inside the ExoMars Rover's drill, Ma_MISS will be the instrument in closest contact with the Martian subsurface. Ma_MISS will image the walls of the borehole created by the drill to study Martian mineralogy and rock formation. This will provide valuable information for the study of subsurface soil and rock layers (i.e., stratigraphy), the distribution and state of water-related minerals, and will help to characterize the geophysical Martian environment. 67)
As the Rover drills into the upper surface of Mars, Ma_MISS will illuminate the hole's cylindrical wall through a transparent window situated in the drill tool. It will capture the reflected light, analyze its spectrum, and transfer the data on the hole stratigraphy to the Rover computer for further analysis and relay to Earth.
Ma_MISS exploits the movement of the drill to acquire data from all around the borehole. The rotation of the instrument as it descends will allow images to be built up in both horizontal (ring image) and vertical sequences (column image).
Ma_MISS's main science objective is to study the Martian subsurface. This is key to understanding the chemical and physical processes that led to the formation and evolution of the site being investigated. The Martian surface is highly influenced by external processes such as weathering, erosion, sedimentation and impact, all of which alter its original properties. The investigation of subsurface layers is the only approach that permits measurements on samples close to their original composition. The analysis of unexposed material by Ma_MISS, together with data obtained from the spectrometers located inside the Rover (Raman, MicrOmega, MOMA), will be crucial for the interpretation of the original conditions of rock formation on Mars.
In-situ analysis of the Martian subsurface provides information that can be used in the following investigations:
• Assessing the habitability of the drilling site and searching for possible indicators of life.
• Determining the presence of ice or water at the drilling site.
• Documenting the mineral distribution and composition, and identifying the nature of local geology and chemistry.
• Studying the Martian surface layers in terms of hazards and resources relevant to the potential for survival of humans on the surface.

ADRON-RM (Autonomous Detector of Radiation of Neutrons onboard Rover at Mars)
ADRON-RM is a Russian project selected for the joint European Space Agency-Roscosmos ExoMars 2020 landing mission. A compact passive neutron spectrometer, ADRON-RM, was designed to study the abundance and distribution of water and neutron absorption elements (such as Cl, Fe, and others) in the martian subsurface along the path of the ExoMars rover. 68)
The ADRON-RM instrument is under development at the Space Research Institute (IKI), Moscow, Russia, under contract with the State Corporation Roscosmos and will be contributed to the joint ESA-Roscosmos ExoMars mission by Roscosmos. While onboard the rover, ADRON-RM will measure the spatial variability of neutron flux emitted from the martian surface. The data processing procedure will convert the raw data into an estimation of bulk water distribution and abundance of neutron absorption elements, initially chlorine and iron. The instrument will also provide continuous monitoring of the neutron component of the radiation background and expand our knowledge about Mars' surface radiation, which will inform with regard to future human missions to the planet.
The main objectives of the ADRON-RM scientific investigation include the following measurements and activities:
• Measurement of the distribution of bulk hydrogen content (in the form of free or bound water) at the stationary platform location and along a rover traverse;
• Evaluation of the bulk composition of major soil neutron absorption elements (Cl, Fe, S, Ti, etc.) at the stationary platform location and along a rover traverse;
• Monitoring of the neutron component of the natural radiation background and estimation of neutron radiation dose at the martian surface from GCRs (Galactic Cosmic Rays) and SPEs (Solar Particle Events);
• The potential to monitor seasonal changes of the neutron environment due to variations of atmospheric and subsurface properties. The mission duration is currently limited to slightly more than 200 sols on the surface, which will provide the potential to observe at least one transition between two seasons. If the rover survives beyond its estimated lifetime at the surface, it could potentially offer full coverage of the martian seasons.
The ADRON-RM is designed as a single unit (Figure 1). The principles and design are inherited directly from the DAN (Dynamic Albedo of Neutrons) instrument onboard NASA's 2011 MSL Rover mission. DAN consists of two separate units integrated at the two sides of the rover: a pulsed neutron generator (DAN/PNG) and detector element (DAN/DE). DAN can be operated both in active and in passive modes of measurements. In active mode, the DAN/PNG produces 2 µs pulses of high-energy (14.1 MeV) neutrons emitted into the 4π steradians around the DAN/PNG. In passive mode, the DAN/DE measures neutron albedo from the subsurface, which is produced by the rover multimission radioisotope thermoelectric generator (MMRTG) and GCRs.
CLUPI (Close-Up Imager)
CLUPI onboard the ESA ExoMars Rover is a powerful high-resolution color camera specifically designed for close-up observations. Its accommodation on the movable drill allows multiple positioning. The science objectives of the instrument are geological characterization of rocks in terms of texture, structure, and color and the search for potential morphological biosignatures. We present the CLUPI science objectives, performance, and technical description, followed by a description of the instrument's planned operations strategy during the mission on Mars. CLUPI will contribute to the rover mission by surveying the geological environment, acquiring close-up images of outcrops, observing the drilling area, inspecting the top portion of the drill borehole (and deposited fines), monitoring drilling operations, and imaging samples collected by the drill. 69)
The camera system will take images of rock and unconsolidated material at very fine, tens of micrometers to centimeters. These images will help scientists determine the environment – for example: aqueous, volcanic, etc. – that gave rise to the rocks that are analyzed. This will provide the geological context and therefore improve the scientists' ability to interpret the results obtained by the other rover instruments. 70)
Another very important objective of CLUPI will be to search for morphological biosignatures on outcrops. The primitive types of microorganisms that could have existed on Mars would be very small, probably less than a micron to not more than a few microns in size, but their colonies and biofilms are much larger. Traces of these features may be preserved in the Martian rocks either as mineral-replaced structures and/or as carbon remains trapped in the Martian sediments and encased in a mineral cement. Although the individual cells will be too small to be recognizable in outcrop by CLUPI (complex sample preparation and use of powerful microscopes is necessary for this), the Close Up Imager will be able to image concentrations of colonies forming a spotted, carbon-rich texture called thrombolitic, or forming laminar biofilms.
CLUPI will be an imager with the ability to focus from 10 cm to infinity. At a distance of 10 cm from the object, the resolution of the images will be high – about 7 µm/pixel. To give color images, the camera will have three layers of pixels – red, green and blue.
CLUPI will be located on the drill box of the rover. By using the degrees of freedom provided by both the rover and the drill box, CLUPI will be angled and raised so it can observe in a variety of viewing modes. The use of two fixed mirrors – one flat and one concave – will provide three FOVs (Fields of View).
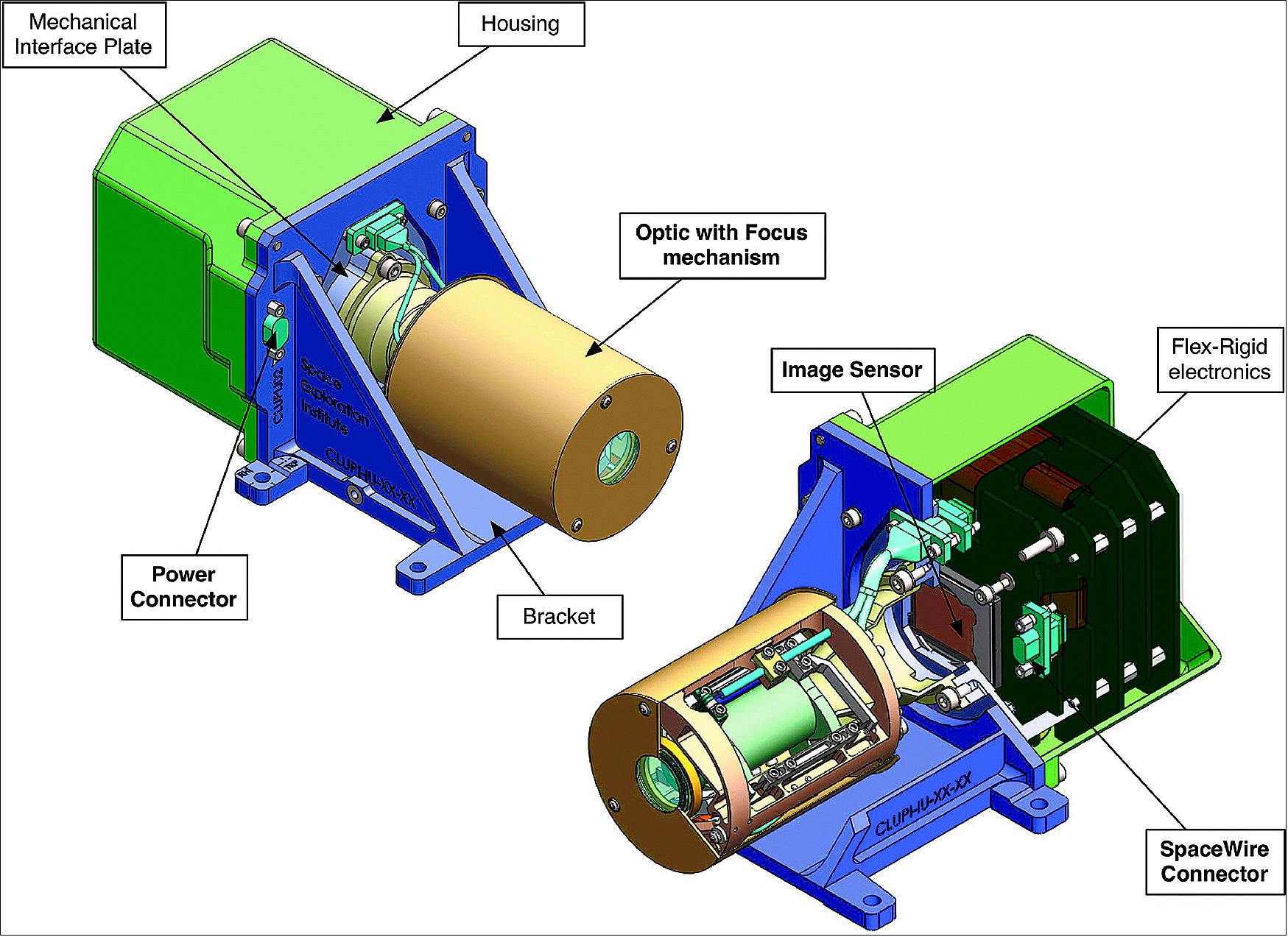
MOMA (Mars Organic Molecule Analyzer)
The objective of the MOMA instrument onboard the ESA/Roscosmos ExoMars rover is to analyze volatile and refractory organic compounds in martian surface and subsurface sediments. The MOMA investigation directly addresses the ExoMars scientific objective to search for signs of past or present life on Mars. It achieves this by analyzing a wide range of organic compounds that may be found in drill samples acquired up to 2 m below the martian surface. MOMA must first volatilize organic compounds so that they can be detected by a mass spectrometer (MS). Volatilization of organic material is achieved by either one of its two operational modes: (1) heating of the sample to induce evaporation and/or thermochemical decomposition (pyrolysis) and liberate species into the gas phase, possibly also being preceded by a chemical derivatization step to aid in this gas-phase transition, and (2) direct interrogation of the sample by intense ultraviolet (UV) laser pulses inducing prompt desorption into the gas phase. In the case of operational mode (1), the organic compounds will be separated by gas chromatographic columns before they reach the MS, while in the case of operational mode (2), the laser-desorbed species are sent directly to the MS without further separation. Either mode enables direct detection of indigenous martian organic molecules (in some cases, as unfragmented parent ions) and will thus be of high diagnostic and scientific value. MOMA can also detect some thermally released inorganic molecules (e.g., SO2) or laser-desorbed fragments of inorganic minerals (e.g., iron oxide or silicate fragments). By characterizing the types, distributions, and molecular structures of detected organics, MOMA can provide powerful insights into the origin and processing of potential molecular biosignatures. 71)
Team organization: The MOMA instrument is assembled from modules produced and tested at several institutions. The Rosetta heritage ovens and tapping station (TS) are developed at the Max Planck Institute for Solar System Research (MPS) in Germany. The gas chromatograph (GC) is built at Laboratoire Interuniversitaire des Systèmes Atmosphériques (LISA) and Laboratoire ATmosphères, Milieux, Observations Spatiales (LATMOS) in France with some German participation in the electronics by MPS. Pyrolysis GC testing campaigns have been managed in a partnership between the German and French teams. The MS and its drive electronics, as well as the main electronics of MOMA, are developed by NASA's Goddard Space Flight Center (GSFC) and its partners at the Space Physics Research Laboratory (SPRL) at the University of Michigan in conjunction with Battel Engineering. The laser drive electronics are built at MPS, while the laser head (LH) is designed and built at Laser Zentrum Hannover (LZH).
MOMA is the largest instrument in the ExoMars Rover, and the one directly targeting biomarkers. MOMA will answer questions related to the potential origin, evolution and distribution of life on Mars. In addition to studying the samples collected by the drill, MOMA will also analyze gases in the Martian atmosphere. 72)
MOMA has two complementary operational modes: Gas Chromatograph-Mass Spectrometry (MOMA GC-MS) and Laser Desorption-Mass Spectrometry (MOMA LD-MS).
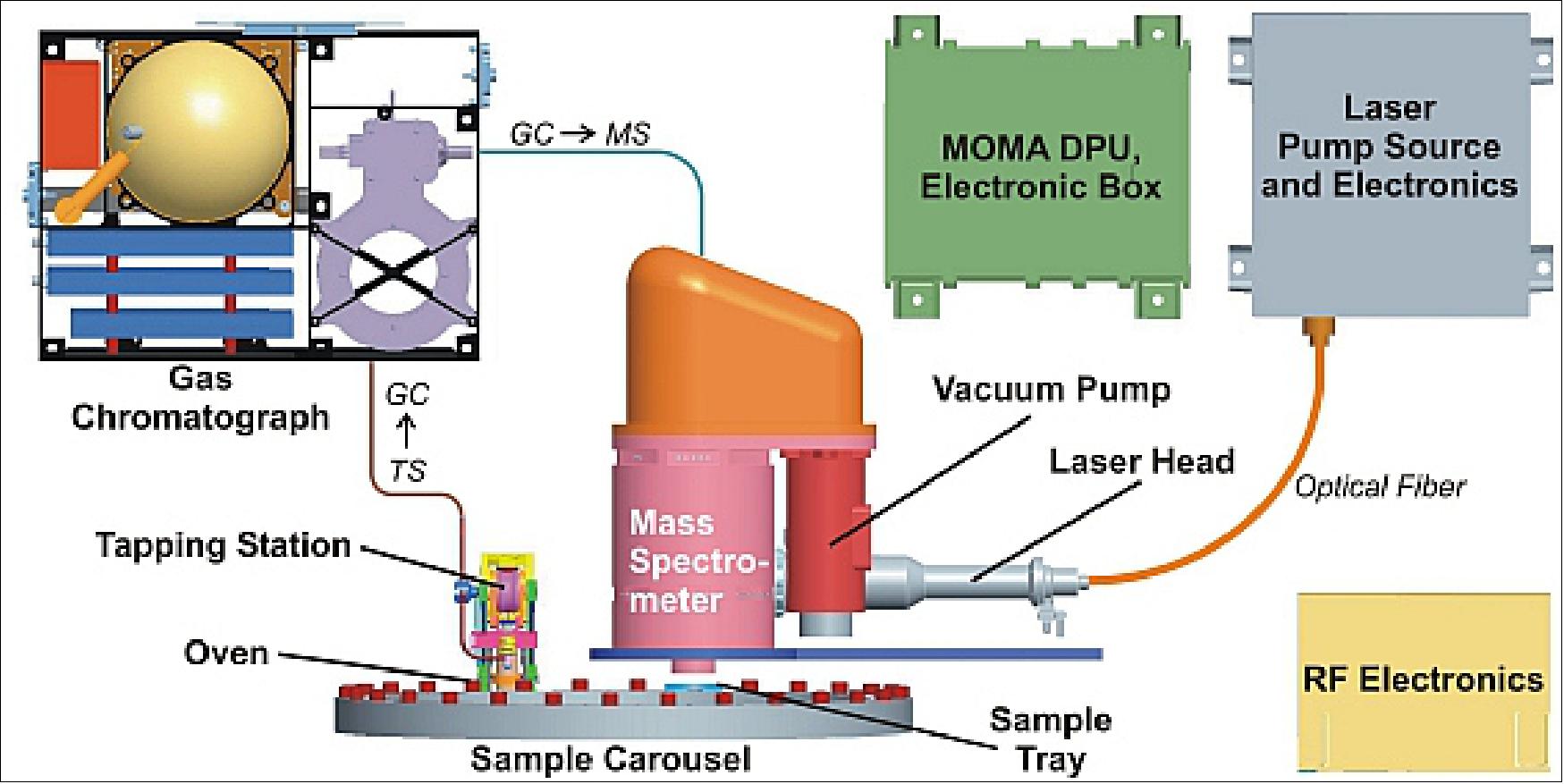
MicrOmega (Micro-imaging system)
MicrOmega is a visible near-infrared hyperspectral microscope that is designed to characterize the texture and composition of martian samples presented to the instrument within the ExoMars rover's analytical laboratory drawer. The spectral range (0.5–3.65 µm) and the spectral sampling (20 cm-1 from 0.95 to 3.65 µm) of MicrOmega have been chosen to allow the identification of most constituent minerals, ices/frosts, and organics with astrobiological relevance within each 20 x 20 µm2 pixel over a 5 x 5 mm2 field of view. Such an unprecedented characterization will enable (1) identification of most major and minor phases, including the potential organics; (2) ascription of their mineralogical context, as a critical set of clues with which to decipher their formation process; and (3) location of specific grains or regions of interest in the samples, which will be further analyzed by Raman Laser Spectrometer and/or Mars Organic Molecule Analyzer. 73)
MicrOmega is designed to identify, at grain scale, the mineralogical and the molecular composition of the Martian samples collected by the ExoMars drill. MicrOmega along with MOMA (Mars Organics Molecule Analyzer) and RLS (Raman Laser Spectrometer), will characterize the collected samples, and specifically the organic substances they may contain. 74)
In particular, MicrOmega will analyze the samples with a view to unravelling their geological origin and composition by examining the minerals that they contain. Some minerals can act as monitors of the physical and chemical conditions under which the materials are formed. These data will be vital to characterize the past and present geological processes, climate and environment of Mars and specifically, to help identify evidence of carbon or the past presence of water. They can, therefore, be used to assess whether these samples might have acted as a suitable habitat for life, and whether they have preserved bio-relics.
In addition, MicrOmega can be used to locate grains of particular interest (for example, grains that may have been processed by liquid water) in a totally non-destructive manner, so as to assign them as targets for Raman and MOMA LD-MS observations.
PanCam (Panoramic Camera)
The scientific objectives of the ExoMars rover are designed to answer several key questions in the search for life on Mars. In particular, the unique subsurface drill will address some of these, such as the possible existence and stability of subsurface organics. PanCam will establish the surface geological and morphological context for the mission, working in collaboration with other context instruments. Here, we describe the PanCam scientific objectives in geology, atmospheric science, and 3-D vision. We discuss the design of PanCam, which includes a stereo pair of Wide Angle Cameras (WACs), each of which has an 11-position filter wheel and a High Resolution Camera (HRC) for high-resolution investigations of rock texture at a distance. The cameras and electronics are housed in an optical bench that provides the mechanical interface to the rover mast and a planetary protection barrier. The electronic interface is via the PanCam Interface Unit (PIU), and power conditioning is via a DC-DC converter. PanCam also includes a calibration target mounted on the rover deck for radiometric calibration, fiducial markers for geometric calibration, and a rover inspection mirror. 75)
This instrument will provide stereo and 3D imagery of the terrain around the Rover, for the benefit of the mission as a whole. In particular, the Panoramic Camera will be used: 76)
• To help locate the landing site and Rover position with respect to local geographical references;
• To provide the geological context of the sites explored by the Rover;
• To support the selection of the best sites to carry out exobiology studies;
• To study properties of the atmosphere and of other variable phenomena.
PanCam will also support the scientific measurements of other Rover instruments. It will capture high-resolution images of locations that are difficult to access, such as craters or rock walls. Then, it will monitor the sample from the drill before it is ingested and crushed inside the Rover, where the Analytical Laboratory instruments will perform a detailed chemical, physical, and spectral analysis.
LRS (Raman Laser Spectrometer)
The LRS on board the ESA/Roscosmos ExoMars 2020 mission will provide precise identification of the mineral phases and the possibility to detect organics on the Red Planet. The RLS will work on the powdered samples prepared inside the Pasteur analytical suite and collected on the surface and subsurface by a drill system. Raman spectroscopy is a well-known analytical technique based on the inelastic scattering by matter of incident monochromatic light (the Raman effect) that has many applications in laboratory and industry, yet to be used in space applications. Raman spectrometers will be included in two Mars rovers scheduled to be launched in 2020. The Raman instrument for ExoMars 2020 consists of three main units: (1) a transmission spectrograph coupled to a CCD detector; (2) an electronics box, including the excitation laser that controls the instrument functions; and (3) an optical head with an autofocus mechanism illuminating and collecting the scattered light from the spot under investigation. The optical head is connected to the excitation laser and the spectrometer by optical fibers. The instrument also has two targets positioned inside the rover analytical laboratory for onboard Raman spectral calibration. The aim of this article was to present a detailed description of the RLS instrument, including its operation on Mars. To verify RLS operation before launch and to prepare science scenarios for the mission, a simulator of the sample analysis chain has been developed by the team. 77)
The Raman instrument provides a powerful tool for the definitive identification and characterization of minerals and biomarkers. Raman spectroscopy is sensitive to the composition and structure of any mineral or organic compound. This capability provides direct information of potential organic compounds that can be related with present or past signatures of life on Mars as well as general mineralogical information for igneous, metamorphous, and sedimentary processes, especially water-related geo-processes. 78)
The Raman laser spectrometer will be used:
• to identify organic compounds and search for signatures of life;
• to identify the mineral products and indicators of biological activities;
• to characterize mineral phases produced by water-related processes; and
• to characterize igneous minerals and their products resulting from alteration processes (e.g. oxidation).
Raman will also support the scientific measurements by correlating its spectral information with other spectroscopic and imaging instruments such as the MicrOmega Infrared Spectrometer. Furthermore, the Raman instrument is capable of measuring the sample at a fast-pace (within minutes) in order to release the selected sample for further analysis by other ExoMars instruments (e.g. the MOMA instrument).
WISDOM (Water Ice Subsurface Deposit Observation on Mars) radar
The search for evidence of past or present life on Mars is the principal objective of the 2020 ESA-Roscosmos ExoMars Rover mission. If such evidence is to be found anywhere, it will most likely be in the subsurface, where organic molecules are shielded from the destructive effects of ionizing radiation and atmospheric oxidants. For this reason, the ExoMars Rover mission has been optimized to investigate the subsurface to identify, understand, and sample those locations where conditions for the preservation of evidence of past life are most likely to be found. The Water Ice Subsurface Deposit Observation on Mars (WISDOM) ground-penetrating radar has been designed to provide information about the nature of the shallow subsurface over depth ranging from 3 to 10 m (with a vertical resolution of up to 3 cm), depending on the dielectric properties of the regolith. This depth range is critical to understanding the geologic evolution stratigraphy and distribution and state of subsurface H2O, which provide important clues in the search for life and the identification of optimal drilling sites for investigation and sampling by the Rover's 2-m drill. WISDOM will help ensure the safety and success of drilling operations by identification of potential hazards that might interfere with retrieval of subsurface samples. 79)
The WISDOM radar is being developed through an international and multidisciplinary collaboration of science and technical teams. The instrument is being built and tested by a French–German consortium supported by the French Space Agency CNES (Centre National d'Etudes Spatiales) and DLR (German Space Agency ), Deutsche Forschungsanstalt für Luft-und Raumfahrt, led by Valérie Ciarletti (Principal Investigator) from LATMOS (Laboratoire Atmosphères, Milieux, Observations Spatiales) in Guyancourt, France. LATMOS, in collaboration with Laboratoire d'Astrophysique de Bordeaux (LAB), is responsible for the electronics unit (EU) hardware manufacturing and delivery, while the Technische Universität Dresden (TUD, Germany) is responsible for the antenna system, under the supervision of Dirk Plettemeier (Co-Principal Investigator).
The WISDOM radar will provide a detailed view of the Red Planet's shallow subsurface structure by sounding the upper layers of its crust. Unlike traditional imaging systems or spectrometers, which are limited to studying the visible surface, this radar will access what lies beneath. WISDOM will provide the three-dimensional geological context of the terrain covered by the Rover. This additional perspective is vital for a better understanding of the planet's evolution, and the impact of its changing geology and climate on past and present habitability. 80)
WISDOM will study the nature of the subsurface remotely, using radar pulses from a UHF ground penetrating radar, covering the frequency range from 500 MHz to 3 GHz, to map the subterranean layers. It will provide high-resolution measurements, with a vertical resolution of a few centimeters, down to a depth of 3 m, complementing the 2-meter reach of the Rover's drill. The instrument can transmit and receive signals using two small antennas mounted on the back of the Rover. The WISDOM measurements will be used to identify optimal drilling sites by determining the nature, location and size of potential targets, and to ensure the safety of the drilling operations by minimizing the likelihood of contact with potential hazards.
WISDOM's main science objectives are:
• To investigate the three-dimensional geology and geological evolution of the landing site, and provide information on the general physical characteristics of local rocks, the rock layering and structure;
• To characterize the electromagnetic properties of Martian soil in order to map the scale of diversity in the shallow subsurface; and
• To observe the local distribution of well-compacted, sedimentary deposits that may have been associated with a water-rich environment in the past.
ExoMars 2020 Parachute Deployment Campaign
The largest parachute ever to fly on a Mars mission has been deployed in the first of a series of tests to prepare for the upcoming ExoMars 2020 mission that will deliver a rover and a surface science platform to the Red Planet. 81)
The spacecraft that will carry them is due for launch in July 2020, with arrival at Mars in March 2021. The rover will be the first of its kind to drill below the surface and determine if evidence of life is buried underground, protected from the destructive radiation that impinges the surface today.
A carrier module will transport the rover and the science platform to Mars within a single aeroshell. A descent module will separate from the carrier shortly before reaching the atmosphere, whereupon a heatshield, parachutes, thrusters and damping systems will reduce the speed, delivering them safely to the surface.
Kiruna campaign March 2018: The focus of the latest test, conducted in sub-zero conditions in Kiruna, Sweden earlier this month, was the 35 m-diameter second main parachute. The test demonstrated the deployment and inflation of the parachute with its 112 lines connected to a drop test vehicle, via the deployment of a smaller 4.8 m-wide pilot chute.
The complete parachute system, with a total mass of 195 kg, is stowed in a dedicated canister. The second main parachute of 70 kg, is folded with its 5 km of cords in a precise way – a process that takes around three working days – to ensure it is extracted properly.
The assembly was lofted 1.2 km above the ground with a helicopter, and the sequence initiated after the vehicle was released. About 12 seconds after the pilot chute was inflated, the second parachute release was triggered.
GoPro cameras 82) on the 500 kg test vehicle looked up at the parachute inflation, and onboard equipment sent telemetry in real time as it descended in about two and a half minutes to the ground.

“The successful deployment of our large ExoMars parachute using a smaller pilot chute and its subsequent stable descent without damage, is a major milestone for the project,” says ESA’s Thierry Blancquaert.

“It was a very exciting moment to see this giant parachute unfurl and deliver the test module to the snowy surface in Kiruna, and we’re looking forward to assessing the full parachute descent sequence in the upcoming high-altitude tests.”
That testing will see the equipment dropped from a stratospheric balloon from nearly 30 km, to more accurately represent the low atmospheric pressure on Mars – a vital aspect when considering parachute inflation.
The subsequent tests will also investigate the full parachute deployment sequence, which comprises two main parachutes, each with a pilot chute.
The dual parachute approach accommodates the much heavier descent module of the ExoMars 2020 mission – some 2000 kg compared with nearly 600 kg of the previous mission.
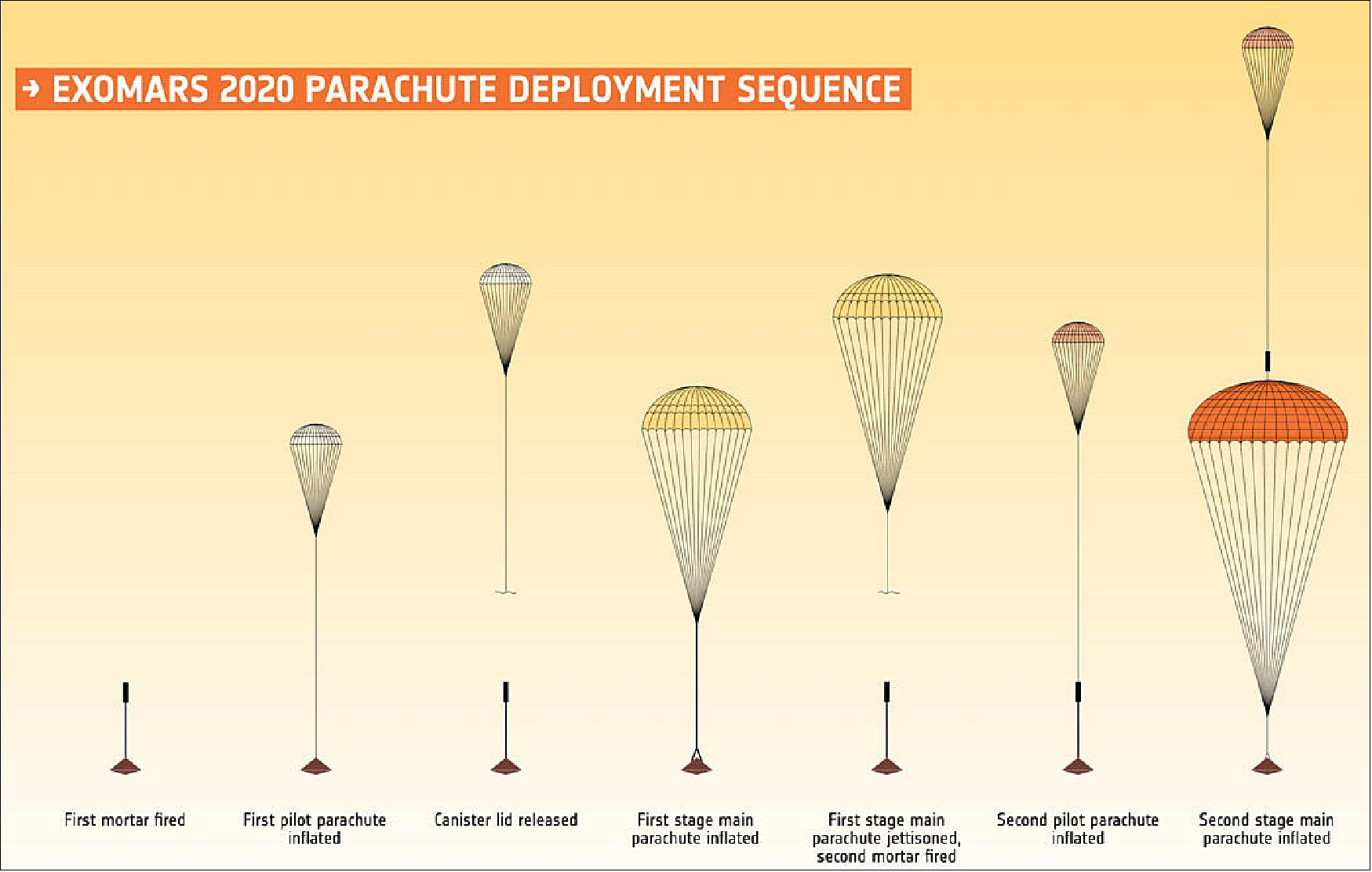
Legend to Figure 94: The graphic highlights the main events concerning the parachutes, a sequence that is initiated after significant slowing of the 3.8 m-wide entry module in the atmosphere with the aeroshell’s heatshields. Then the first pilot parachute is deployed, and shortly after the first main stage parachute, which measures 15 m in diameter and has a disc-gap band design. It will open while the module is still travelling at supersonic speed and will be jettisoned prior to the deployment of the second pilot chute and second stage main parachute once at subsonic speeds. The second stage main parachute has a ring-slot design and is 35 m in diameter, the largest to ever fly on Mars.
The second pilot chute remains attached to the main parachute in order to prevent rebound of the deployed parachute. During latter stages of the descent (not pictured) the aeroshell’s front heatshield will be discarded, and the landing platform will be released for its final descent and propulsive braking phase. Once safely on the surface, it will subsequently deploy ramps for the rover to drive down and on to Mars.
The last two stages depicted in this graphic were the focus of a low-altitude parachute deployment test conducted in March 2018. The full sequence will be tested in follow-up high-altitude tests.
References
1) Bruno Musetti, Andrea Allasio, Maurizio Capuano, Bruno Vinai, Francois Spoto, Pietro Baglioni, Thierry Blancquaert, Albert Haldemann, Alexey Ivanov, Oleg Sedykh, ”Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-A3.3A.3, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A3/3A/manuscripts/IAC-18,A3,3A,3,x47106.pdf
2) ”ExoMars Rover and Surface Platform (RSP)”, ESA, URL: https://www.cosmos.esa.int/web/psa/exomars_rsp
3) ”ExoMars Mission (2020),” ESA, 2 May 2016, URL: http://exploration.esa.int/mars/48088-mission-overview/
4) Anatoly Zak, ”Russia continues works on ExoMars lander design,” Russian Spaceweb, 6 April 2018, URL: http://www.russianspaceweb.com/exomars2018-2017.html
5) Diana Beatriz Margheritisa, Bruno Musetti, Enrico Andrea Nisticò, Silvia Procchio, ”Planetary Protection on COSPAR Category IVb ExoMars Mission 2020,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18,A3,3A,10 URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A3/3A/manuscripts/IAC-18,A3,3A,10,x42850.pdf
6) Miracle Israel Nazarious, Abhilash Vakkada Ramachandran, Maria-Paz Zorzano, Javier Martin-Torres, ”Calibration and preliminary tests of the Brine Observation Transition To Liquid Experiment on HABIT/Exomars 2020 for demonstration of liquid water stability on Mars,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A3.3B.8, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A3/3B/manuscripts/IAC-18,A3,3B,8,x42640.pdf
7) Robert Paul, Daniel Redlich, Tim Tattusch, Markus Thiel, Christiane Bergemann-Mecucci, Fabio Musso, Stephen Durrant, ”Flight-Model Test Results of the Mechanism Suite in ESA‘s ExoMars Rover Analytical Laboratory Drawer,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.A3.3B.4, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/A3/3B/manuscripts/IAC-18,A3,3B,4,x44734.pdf
8) Maurizio Deffacis, Lorenzo Bramante, Marco Barrera, Roberto Trucco, Paola Franceschetti, Luc Joudrier, Adam Williams, ”The Mars Terrain Simulator: an indoor analogue facility to validate and simulate ExoMars Rover Operations and to support the ExoMars Surface Mission,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-B6.3.5, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B6/3/manuscripts/IAC-18,B6,3,5,x42837.pdf
9) Diego Bussi, Marco Barrera, Roberto Trucco, Federico Salvioli, Massimo Rabaioli, Eugenio Topa, Andrea D’Ottavio, Livia Savioli, Liliana Ravagnolo, Giovanni Martucci di Scarfizzi, Paola Franceschetti, Luc Joudrier, Adam Williams, Tanya Lim, ”Challenges in the definition, validation and simulation of the ground operations of the ExoMars 2020 Rover surface mission at the Rover Operations Control Centre (ROCC),” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-B6.3.6, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B6/3/manuscripts/IAC-18,B6,3,6,x42840.pdf
10) ”ExoMars 2022 journey,” ESA Science & Exploration, 01 October 2020, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/The_way_forward_to_Mars
11) ”Rover ready – next steps for ExoMars,” ESA Science & Exploration, 28 March 2022, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/Rover_ready_next_steps_for_ExoMars
12) ”Nº 40–2022: Cancelled: The way forward to Mars,” ESA Press Release, 18 July 2022, URL: https://www.esa.int/Newsroom/Press_Releases/Cancelled_The_way_forward_to_Mars
13) ”Nº 9–2022: ExoMars suspended,” ESA Press Releases. 17 March 2022, URL: https://www.esa.int/Newsroom/Press_Releases/ExoMars_suspended
14) ”Double drop test success for ExoMars parachutes,” ESA Science & Exploration, 14 December 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/Double_drop_test_success_for_ExoMars_parachutes
15) ”Rover escapes from sand trap,” ESA Science & Exploration, 03 December 2021, URL: https://www.esa.int/ESA_Multimedia/Videos/2021/12/Rover_escapes_from_sand_trap
16) ”Smart focus on Mars,” ESA Science & Exploration, 4 November 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/Smart_focus_on_Mars
17) ”ExoMars rover comes out of the ‘oven’, ” ESA Science & Exploration, 29 October 2021, URL: https://www.esa.int/ESA_Multimedia/Videos/2021/10/ExoMars_rover_comes_out_of_the_oven
18) ”First deep drilling success for ExoMars,” ESA Science & Exploration, 15 September 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/First_deep_drilling_success_for_ExoMars
19) ”Drop tests for touchdown on Mars,” ESA Science & Exploration, 3 September 2021, URL: https://www.esa.int/ESA_Multimedia/Videos/2021/08/Drop_tests_for_touchdown_on_Mars
20) ”ExoMars parachute high-altitude drop test,” ESA Science & Exploration, 2 July 2021, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_28_June_-_02_July_2021
21) ”ExoMars rover twin begins Earth-based mission in ‘Mars Terrain Simulator',” ESA Science & Exploration, 4 June 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_rover_twin_begins_Earth-based_mission_in_Mars_Terrain_Simulator
22) ”New ExoMars parachute ready for high altitude drop,” ESA Science & Exploration, 21 May 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/New_ExoMars_parachute_ready_for_high_altitude_drop
23) ”ExoMars goes for a spin,” ESA Science & Exploration, 05 March 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_goes_for_a_spin
24) ”ExoMars rover joins Kazachok platform,” ESA Science & Exploration, 8 December 2020, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_07_-_11_December_2020
25) ”ExoMars parachute testing moves forward,” ESA Science & Exploration, 18 November 2020, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_parachute_testing_moves_forward
26) ”ExoMars platform and rear jacket,” ESA Science & Exploration, 4 November 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/11/ExoMars_platform_and_rear_jacket
27) ”ExoMars moves on,” ESA Science & Exploration, 29 September 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/09/ExoMars_moves_on
28) ”Mars rover revival,” ESA Science & Exploration, 22 July 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/07/Mars_rover_revival
29) ”ExoMars rover upgrades and parachute tests,” ESA Science & Exploration, 15 May 2020, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_rover_upgrades_and_parachute_tests
30) ”Disinfection for planetary protection,” ESA Science & Exploration, 2 April 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/04/Disinfection_for_planetary_protection
31) ”No 6–2020: ExoMars to take off for the Red Planet in 2022,” ESA Science & Exploration, 12 March 2020, URL: http://www.esa.int/Newsroom/Press_Releases/ExoMars_to_take_off_for_the_Red_Planet_in_2022
32) ”ExoMars rover leaves Toulouse,” ESA Science & Exploration, 14 February 2020, URL: http://www.esa.int/About_Us/Week_in_images/Week_in_images_10-14_February_2020
33) ”ExoMars carrier and descent modules during environmental tests,” ESA Science & Exploration, 13 February 2020, URL: http://www.esa.int/About_Us/Week_in_images/Week_in_images_10-14_February_2020
34) ”ExoMars Rover completes environmental tests,” ESA Science & Exploration, 16 January 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/01/ExoMars_Rover_completes_environmental_tests
35) ”Promising progress for ExoMars parachutes,” ESA / Science & Exploration / Human and Robotic Exploration / Exploration / ExoMars, 19 December 2019, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/Promising_progress_for_ExoMars_parachutes
36) ”Rosalind meets Rosalind,” ESA Science & Exploration, 13 December 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/12/Rosalind_meets_Rosalind
37) ”ExoMars parachute progress,” ESA, 15 October 2019, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_parachute_progress
38) ”Fly over the ExoMars 2020 landing site,” ESA, 16 September 2019, URL: http://www.esa.int/spaceinvideos/Videos/2019/09/Fly_over_the_ExoMars_2020_landing_site
39) ”ExoMars modules integrated,” ESA, 6 September 2019, URL: http://www.esa.int/spaceinimages/Images/2019/09/ExoMars_modules_integrated
40) ”ExoMars rover ready for environment testing,” ESA, 27 August 2019, URL: http://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_rover_ready_for_environment_testing
41) ”All instruments onboard Rosalind Franklin rover,” ESA, 20 August 2019, URL: http://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/All_instruments_onboard_Rosalind_Franklin_rover
42) ”ExoMars – Moving on Mars,” ESA, 16 August 2019, URL: http://www.esa.int/spaceinvideos/Videos/2019/08/ExoMars_Moving_on_Mars
43) ”ExoMars parachute testing continues,” ESA, 12 August 2019, URL: http://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_parachute_testing_continues
44) ”ExoMars radio science instrument readied for Red Planet,” ESA, 22 July 2019, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology/ExoMars_radio_science_instrument_readied_for_Red_Planet
45) ”Martian meteorite on Earth calibrates camera bound for Mars,” ESA, 11 July 2019, URL: http://www.esa.int/spaceinimages/Images/2019/07/Martian_meteorite_on_Earth_calibrates_camera_bound_for_Mars
46) ”ExoMars 2020: progress and challenges,” ESA, 28 June 2019, URL: http://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_2020_progress_and_challenges
47) ”ExoMars laboratory passes Red Planet simulation,” ESA, 8 May 2019, URL: http://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_laboratory_passes_Red_Planet_simulation
48) ”ExoMars carrier module ready for tests,” ESA, 4 April 2019, URL: http://m.esa.int/spaceinimages/Images/2019/04/ExoMars_carrier_module_ready_for_tests2
49) ”ExoMars Lander Platform,” ESA, 26 March 2019, URL: http://m.esa.int/spaceinimages/Images/2019/03/Exomas_lander_platform
50) ”ExoMars landing platform arrives in Europe with a name,” ESA, 21 March 2019, URL: http://m.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ExoMars_landing_platform_arrives_in_Europe_with_a_name
51) ”Heat sterilization of ExoMars parachute,” ESA, Technology image of the week, 13 March 2019, URL: http://m.esa.int/spaceinimages/Images/2019/03/Heat_sterilisation_of_ExoMars_parachute
52) ”Fit for Mars,” ESA, 28 February 2019, URL: http://m.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/Fit_for_Mars
53) ”ESA’s Mars rover has a name – Rosalind Franklin,” ESA, 7 February 2019, URL: http://m.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ExoMars/ESA_s_Mars_rover_has_a_name_Rosalind_Franklin
54) ”ExoMars rover under construction,” ESA, 7 February 2019, URL: https://www.esa.int/spaceinimages/Images/2019/02/ExoMars_rover_under_construction3
55) ”ExoMars software passes ESA Mars yard driving test,” ESA, 17 January 2019, URL: https://www.esa.int/Our_Activities/Space_Engineering_Technology/ExoMars_software_passes_ESA_Mars_Yard_driving_test
56) ”ExoFitness,” ESA, Human and robotic exploration image of the week, 27 November 2018, URL: http://m.esa.int/spaceinimages/Images/2018/11/ExoFitness
57) ”Oxia Planum favored for ExoMars surface mission,” ESA, 9 November 2018, URL: http://m.esa.int/Our_Activities/Space_Science/ExoMars/Oxia_Planum_favoured_for_ExoMars_surface_mission
58) ”Thales Alenia Space successfully delivers a key element for European Space Agency’s Exomars 2020 mission,” TAS, 27 September 2018, URL: https://www.thalesgroup.com/en/worldwide/space/press-release/thales-alenia-space-successfully-delivers-key-element-european-space
59) ”Sterilizing an antenna for Mars,” ESA, 27 June 2018, URL: http://m.esa.int/spaceinimages/Images/2018/06/Sterilising_an_antenna_for_Mars
60) ”Red Planet Rover set for extreme environment workout,” ESA, 29 May 2018, URL: http://www.esa.int/Our_Activities/Space_Science/ExoMars/Red_Planet_rover_set_for_extreme_environment_workout
61) ”ExoMars 2020 surface platform,” ESA, 31 October 2016, URL: http://exploration.esa.int/mars/56933-exomars-2020-surface-platform/
62) ”Habitability on Early Mars and the Search for Biosignatures with the ExoMars Rover,” ESA, 1 July 2017, URL: http://exploration.esa.int/mars/44970-publications-archive/?farchive_objecttypeid=15&farchive_objectid=30995&fareaid_2=118
63) Andrew J. Coates,Ralf Jaumann, Oleg Korablev, Valérie Ciarletti, Igor Mitrofanov, Jean-Luc Josset, Maria Cristina De Sanctis, Jean-Pierre Bibring, Fernando Rull, Fred Goesmann, Harald Steininger, Walter Goetz, William Brinckerhoff, Cyril Szopa, François Raulin, Frances Westall, Howell G. M. Edwards, Lyle G. Whyte, Alberto G. Fairén, Jean-Pierre Bibring, John Bridges, Ernst Hauber, Gian Gabriele Ori, Stephanie Werner, Damien Loizeau, Ruslan O. Kuzmin, Rebecca M. E. Williams, Jessica Flahaut, François Forget, Jorge L. Vago, Daniel Rodionov, Oleg Korablev, Håkan Svedhem, Elliot Sefton-Nash, Gerhard Kminek, Leila Lorenzoni, Luc Joudrier, Viktor Mikhailov, Alexander Zashchirinskiy, Sergei Alexashkin, Fabio Calantropio, Andrea Merlo, Pantelis Poulakis, Olivier Witasse, Olivier Bayle, Silvia Bayón, Uwe Meierhenrich, John Carter, Juan Manuel García-Ruiz, Pietro Baglioni, Albert Haldemann, Andrew J. Ball, André Debus, Robert Lindner, Frédéric Haessig, David Monteiro, Roland Trautner, Christoph Voland, Pierre Rebeyre, Duncan Goulty, Frédéric Didot, Stephen Durrant, Eric Zekri, Detlef Koschny, Andrea Toni, Gianfranco Visentin, Martin Zwick, Michel van Winnendael, Martín Azkarate, Christophe Carreau, and the ExoMars Project Team, ”Habitability on Early Mars and the Search for Biosignatures with the ExoMars Rover,” Astrobiology,Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1533
64) Oleg I. Korablev, Yurii Dobrolensky, Nadezhda Evdokimova, Anna A. Fedorova, Ruslan O. Kuzmin, Sergei N. Mantsevich, Edward A. Cloutis, John Carter, Francois Poulet, Jessica Flahaut, Andrew Griffiths, Matthew Gunn, Nicole Schmitz, Javier Martín-Torres, Maria-Paz Zorzano, Daniil S. Rodionov, Jorge L. Vago, Alexander V. Stepanov, Andrei Yu. Titov, Nikita A. Vyazovetsky, Alexander Yu. Trokhimovskiy, Alexander G. Sapgir, Yurii K. Kalinnikov, Yurii S. Ivanov, Alexei A. Shapkin, and Andrei Yu. Ivanov, ”Infrared Spectrometer for ExoMars: A Mast-Mounted Instrument for the Rover,” Astrobiology,Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1543
65) ”ISEM - Infrared Spectrometer for ExoMars,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2302
66) Maria Cristina De Sanctis, Francesca Altieri, Eleonora Ammannito, David Biondi, Simone De Angelis, Marco Meini, Giuseppe Mondello, Samuele Novi, Riccardo Paolinetti, Massimo Soldani, Raffaele Mugnuolo, Simone Pirrotta, Jorge L. Vago, and the Ma_MISS team, ”Ma_MISS on ExoMars: Mineralogical Characterization of the Martian Subsurface,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1541
67) ”Ma_MISS - Mars Multispectral Imager for Subsurface Studies,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2133
68) I.G. Mitrofanov, M.L. Litvak, S.Y. Nikiforov, I. Jun, Y.I. Bobrovnitsky, D.V. Golovin, A.S. Grebennikov, F.S. Fedosov, A.S. Kozyrev, D.I. Lisov, A.V. Malakhov, M.I. Mokrousov, A.B. Sanin, V.N. Shvetsov, G.N. Timoshenko, T.M. Tomilina, V. I. Tret'yakov, and A.A. Vostrukhin, ”The ADRON-RM Instrument Onboard the ExoMars Rover,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1566
69) Jean-Luc Josset, Frances Westall, Beda A. Hofmann, John Spray, Charles Cockell, Stephan Kempe, Andrew D. Griffiths, Maria Cristina De Sanctis, Luigi Colangeli, Detlef Koschny, Karl Föllmi, Eric Verrecchia, Larryn Diamond, Marie Josset, Emmanuelle J. Javaux, Francesca Esposito, Matthew Gunn, Audrey L. Souchon-Leitner, Tomaso R.R. Bontognali, Oleg Korablev, Suren Erkman, Gerhard Paar, Stephan Ulamec, Frédéric Foucher, Philippe Martin, Antoine Verhaeghe, Mitko Tanevski, and Jorge L. Vago, ”The Close-Up Imager Onboard the ESA ExoMars Rover: Objectives, Description, Operations, and Science Validation Activities,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1546
70) ”CLUPI - Close-UP Imager,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2301
71) Fred Goesmann, William B. Brinckerhoff, François Raulin, Walter Goetz, Ryan M. Danell, Stephanie A. Getty, Sandra Siljeström, Helge Mißbach, Harald Steininger, Ricardo D. ArevaloJr., Arnaud Buch, Caroline Freissinet, Andrej Grubisic, Uwe J. Meierhenrich, Veronica T. Pinnick, Fabien Stalport, Cyril Szopa, Jorge L. Vago, Robert Lindner, Mitchell D. Schulte, John Robert Brucato, Daniel P. Glavin, Noel Grand, Xiang Li, and Friso H. W. van Amerom; the MOMA Science Team,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1551
72) ”MOMA - Mars Organics Molecule Analyzer,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2132
73) Jean-Pierre Bibring, Vincent Hamm, Cédric Pilorget, Jorge L. Vago, and the MicrOmega Team, ”The MicrOmega Investigation Onboard ExoMars,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1642
74) ”The MicrOmega Infrared Spectrometer,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2129
75) A.J. Coates, R. Jaumann, A.D. Griffiths, C.E. Leff, N. Schmitz, J.-L. Josset, G. Paar, M. Gunn, E. Hauber, C.R. Cousins, R.E. Cross, P. Grindrod, J.C. Bridges, M. Balme, S. Gupta, I.A. Crawford, P. Irwin, R. Stabbins, D. Tirsch, J.L. Vago, T. Theodorou, M. Caballo-Perucha, G.R. Osinski, and the PanCam Team, ”The PanCam Instrument for the ExoMars Rover,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1548
76) ”PanCam - the Panoramic Camera,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2127
77) Fernando Rull, Sylvestre Maurice, Ian Hutchinson, Andoni Moral, Carlos Perez, Carlos Diaz, Maria Colombo, Tomas Belenguer, Guillermo Lopez-Reyes, Antonio Sansano, Olivier Forni, Yann Parot, Nicolas Striebig, Simon Woodward, Chris Howe, Nicolau Tarcea, Pablo Rodriguez, Laura Seoane, Amaia Santiago, Jose A. Rodriguez-Prieto, Jesús Medina, Paloma Gallego, Rosario Canchal, Pilar Santamaría, Gonzalo Ramos, and Jorge L. Vago; on behalf of the RLS Team, ”The Raman Laser Spectrometer for the ExoMars Rover Mission to Mars,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1567
78) ”RLS - Raman Laser Spectrometer,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2130
79) Valérie Ciarletti, Stephen Clifford, Dirk Plettemeier, Alice Le Gall, Yann Hervé, Sophie Dorizon, Cathy Quantin-Nataf, Wolf-Stefan Benedix, Susanne Schwenzer, Elena Pettinelli, Essam Heggy, Alain Herique, Jean-Jacques Berthelier, Wlodek Kofman, Jorge L. Vago, Svein-Erik Hamran, and the WISDOM Team, ”The WISDOM Radar: Unveiling the Subsurface Beneath the ExoMars Rover and Identifying the Best Locations for Drilling,” Astrobiology, Vol. 17, No. 6-7, Published Online:1 July 2017, https://doi.org/10.1089/ast.2016.1532
80) ”WISDOM - Water Ice and Subsurface Deposit Observation on Mars,” ESA, 25 August 2017, URL: http://exploration.esa.int/mars/45103-rover-instruments/?fbodylongid=2128
81) ”First test success for largest Mars mission parachute,” ESA, 29 March 2018, URL: http://m.esa.int/Our_Activities/Space_Science/ExoMars/First_test_success_for_largest_Mars_mission_parachute
82) GoPro Inc. is an American technology company founded in 2002 by Nick Woodman. It manufactures action cameras and develops its own mobile apps and video-editing software. URL: https://en.wikipedia.org/wiki/GoPro
83) ”ExoMars 2020 parachute deployment sequence,” ESA, 29 March 2018, URL: http://m.esa.int/spaceinimages/Images/2018/03/ExoMars_2020_parachute_deployment_sequence
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002.
Concept Launch Development Status Payloads References Back to top