CXBN (Cosmic X-ray Background Nanosatellite)
Non-EO
NASA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Launch date | 13 Sep 2012 |
| End of life date | 31 Jan 2013 |
CXBN (Cosmic X-ray Background Nanosatellite) / Unbridled Spirit
CXBN is a cooperative nanosatellite mission with the objective to make precise measurements of the cosmic X-ray background in the 30-50 keV range. The mission addresses a fundamental science question central to our understanding of the structure, origin, and evolution of the universe by potentially lending insight into the high energy background radiation.
CXBN is a low-cost CubeSat mission, accepted by NASA’s ELaNa program, devoted to observe improved measurements of the extragalactic DXRB (Diffuse X-Ray Background), with a new gamma ray detector system based on a CZT (Cadmium Zinc Telluride) array. The DXRB measurements have the potential to provide insight into underlying physics of the early universe.
MSU is responsible for the engineering of all spacecraft subsystems, and the detector is being designed by UCB, LLNL (Lawrence Livermore National Laboratory), and Noqsi Aerospace. CXBN will feature many unique systems, including sun sensors, a star sensor system, an ARM-7 Coretex processor, and an articulating solar array. MSU will also provide ground operations for the mission utilizing the 21 m Space Tracking Antenna and other ground assets.
The mission team consists of members of the following US institutions: 1) 2) 3) 4)
• MSU (Morehead State University) of Morehead, KY
• UCB (University of California at Berkeley), Berkeley, CA
• Noqsi Aerospace, Ltd., Pine, CO
• LLNL (Lawrence Livermore National Laboratories), Livermore, CA
• SSU (Sonoma State University), Rohnert Park, CA.
The science goals of the CXBN mission call for:
- Increase the precision DXRB measurement in the 10-50 keV range
- Produce data that will lend insight into underlying physics of the DXRB
- Provide flight heritage for innovative CubeSat technologies
- Provide flight heritage for CZT based X-Ray/Gamma-Ray detectors.
The idea behind the science mission was developed by Benjamin K. Malphrus, Director of the Space Science Center and Chair of the Department of Earth and Space Sciences at MSU, and his long-time collaborator Garrett Jernigan, astrophysicist at the UCB (University of California at Berkeley).
Spacecraft
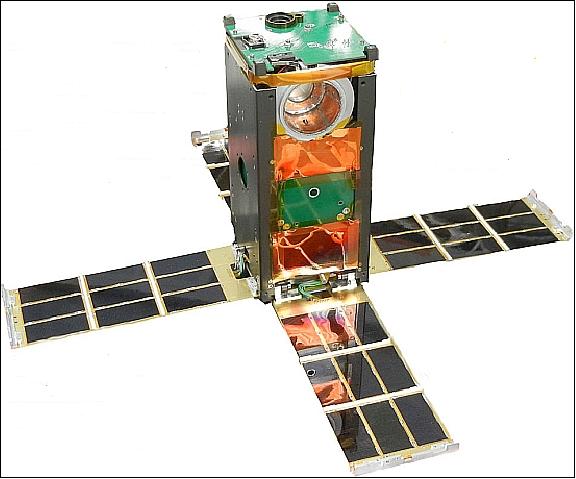
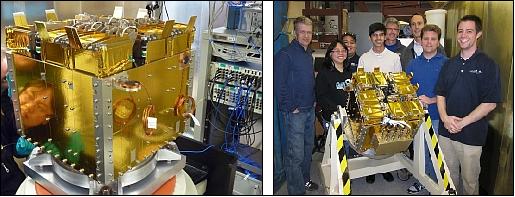
The spacecraft uses a 2U CubeSat form factor with a launch size of 10 cm x 10 cm x 20 cm, a mass of ~2.5 kg, and a maximum power of 15 W.
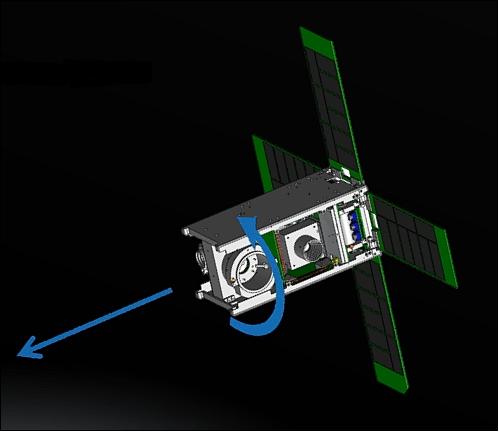
Spacecraft structure: Use of aluminum 6061-T6; type III hard anodized. It serves as a chassis to accommodate a monofilament cutter system that retains four deployable solar panels and blade antennas in the stow configuration. The structures and cutter system also control the deployment in compliance with the NASA LSP (Launch Services Program) secondary payload deployment restrictions.
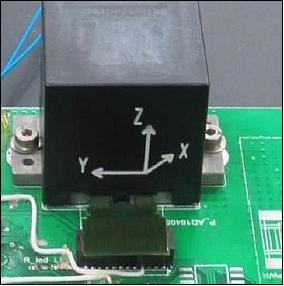
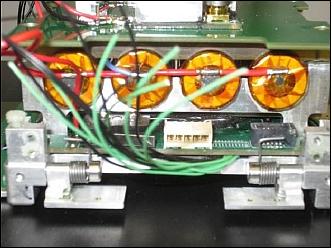
ADCS (Attitude Determination and Control Subsystem): The spacecraft is spin-stabilized and sun-pointing at 1/6 Hz. A DSS (Dual Sun Sensor) is used in pitch and yaw to provide medium and fine FOVs (Field of Views). A combination of MEMS gyros (Figure 2) and a star sensor ('pipper‘) to generate an absolute position pulse as a star transits the viewing area. After stabilization the combination of these two systems allows one to back out the roll orientation when clocked from a common time reference.
• The spacecraft spin rate is determined by a MEMS IMU package consisting of:
- Tri-axis gyros
- Tri-axis magnetometers
- Temperature sensor.
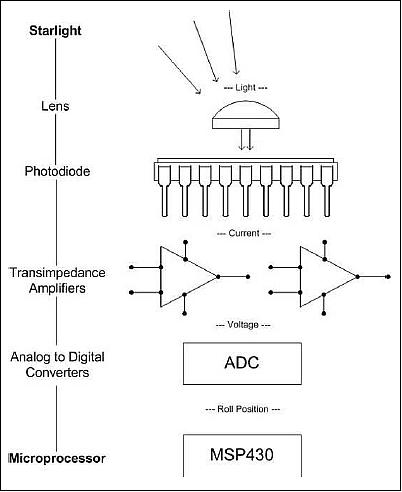
• Canopus Pipper – roll position. A novel idea was proposed by John Doty to use a very similar concept as a Digital Canopus Tracker used in the 1970s, excluding unnecessary and overcomplicated systems. This idea, coined the Canopus Pipper, uses the star Canopus to detect roll position.
- Photodiode array system
- Differential measurements
- Run by payload – synchronized data.
Starlight passes through a lens, to a photodiode. Then the current is converted into a voltage, where it is sampled by analog to digital converters (ADCs). Lastly, the signals from the ADC are sent to a microprocessor for integration into telemetry.
Actuation is provided by:
• Magnetic torque coils, providing
- 3-axis control
- H-bridge driven by PWM from C&DH
- Polarity is checked in single axis Helmholtz chamber
- The torque coils require ~ 500 mA of average power; they are providing a torque of 1.6 x 10 -4 Nm.
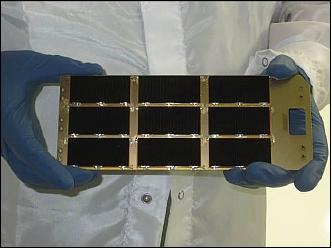
EPS (Electric Power Subsystem): Power generation with 4 deployable solar panels providing a maximum power of 15 W (after sun pointing). Triple-junction 26% efficient solar cells are utilized on the solar panels which are covered by a protective coating of a proprietary polyimide.
• Power storage is provided by:
- 4 Molicel 18650 Li-ion batteries
- 1S4P configuration – buck/boost
- Battery capacity of 2200 mAh.
• PMAD (Power Management and Distribution) system:
- Direct energy transfer
- Dedicated MSP430
- Shunt regulation
- 3.3V and 5V regulated rails
- Current limiting on all subsystems
- Deployable cut circuit.
C&DH (Command & Data Handling) subsystem:
• MCU – MSP430 (Microcontroller Unit) MSP430 of Texas Instruments.
- 65 mA - active
- Three 16-bit timers
- Direct memory access
- 100-pin packages available
- Up to 8 communication interfaces
- LQFP (Low-profile Quad Flat Package)
• Reprogrammable
• Provides BSL (BootStrap Loader) entry for payload and EPS.
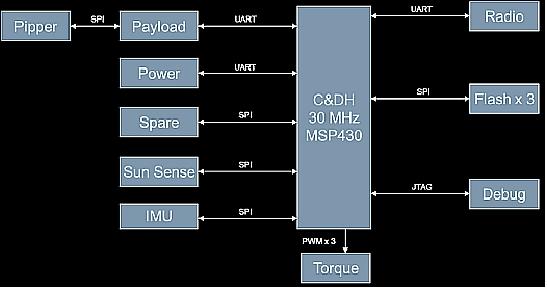
The flight computer C&DH subsystem is responsible for commanding and monitoring all spacecraft subsystems and for commanding and monitoring the payload. The MSU C&DH is designed specifically to work with microprocessor-controlled payloads. The C&DH is based on the Texas Instruments MSP430F543xA series microcontroller. The RISC 16-bit CPU is designed for low cost and, specifically, low power consumption embedded applications. The advantage of this C&DH architecture is its commonality with terrestrial systems and capability to operate at full specification without consuming significant amounts of power.
An overview of the C&DH and communication interfaces on CXBN is illustrated in Figure 6. The payload interface is a combination of analog to digital and digital capture circuitry to support X-ray energy level capture. The interfaces required a dedicated MSP430 processor to control the timing and mode operations of the payload.
RF communications: The mission will include an education and public outreach component that will allow licensed amateur radio operators to utilize the CubeSat in a variety of ways. The beacon will broadcast basic telemetry packets using AX.25 protocol.
The AstroDev Li-1 UHF transceiver is used for data transmissions (GSFK modulation, 437.525 MHz frequency).The baseline configuration provides command uplink at 9.6 kbit/s and telemetry downlink at 9.6 kbit/s with up to 38.4 kbit/s (reconfigurable in flight). 5)
• Use of ¼ wave steel blade antennas
- Quadrature monopole array
- Phase network for RHCP (Right Hand Circular Polarization)
- Tune to S11
- Verified in anechoic chamber.
Launch mass, prime power generated | 2.4 kg, 15 W continuous |
Payload mass, volume | 1kg, 1U |
ADCS pointing capability | ±2.0º |
Dynamics | Sun, Star pointing |
Payload power required | 5 W (peak), 3.8 W (OAP) |
Voltages available to payload | 600 V, 5 V, 3.3 V |
Max. sustainable current | 2.5 A @ 5 V, 1.5 A @ 3.3 V |
Downlink data rate | 9.6-38.4 kbit/s |
Beacon | CW (continuous Wave), 0.1 to 2.5 W |
Spacecraft operational lifetime | > 1 year |
On January 6, 2012, MSU delivered the CXBN spacecraft to NASA. 6)
Launch
The CXBN nanosatellite was launched on Sept. 13, 2012 as a secondary payload in NASA's ELaNa-6 (Educational Launch of Nanosatellites) Launch Services Program. Launch site: VAFB, CA; launch vehicle: Atlas-5 -401 of ULA (United Launch Alliance). The primary payload on this flight, referred to as NROL-36, were two NRO/MSD (Mission Support Directorate) classified spacecraft (NRO-36, namely NOSS-36A and NOSS-36B). 7) 8) 9)
Orbit of all secondary payloads: Elliptical orbit of 770 km x 480 km, inclination = 64º.
The NASA/LSP (Launch Services Program) sponsored secondary spacecraft on this ELaNa-6 flight are: 10)
• CINEMA (CubeSat for Ions, Neutrals, Electrons, & MAgnetic fields), 3U CubeSat of UCB/SSL (USA), ICL (UK), KHU (Korea), and NASA/ARC.
• CSSWE (Colorado Student Space Weather Experiment), a 3U CubeSat (~ 4 kg) of the University of Colorado at Boulder.
• CP5 (Cal Poly CubeSat 5), a 1U CubeSat.
• CXBN (Cosmic X-ray Background Nanosatellite), a 2U CubeSat of a consortium of US institutions: MSU (Morehead State University) of Morehead, KY; UCB (University of California at Berkeley), Berkeley, CA; Noqsi Aerospace, Ltd., Pine, CO; LLNL (Lawrence Livermore National Laboratories), Livermore, CA; and SSU (Sonoma State University), Rohnert Park, CA.
Next to the above list of NASA sponsored secondary payloads, there are additional secondary payloads sponsored by NRO/MSD as shown in Table 2 (containing all secondary payloads).
P-POD | Launch Sponsor | CubeSat Name | Organization | Size | Mass (kg) | Mission |
1 & 8 | NRO/MSD | SMDC-ONE 2.1 | US Army SMDC/ | 3U, Qty 2 | 4.1 | Communications |
2 | NRO/MSD | AeroCube-4.5 | Aerospace Corp., El Segundo, CA | 1U, Qty 2 | 1.3 | Technology Demo |
2 | NRO/MSD | AeroCube-4.0 | Aerospace Corp | 1U | 1.1 | Technology Demo |
3 | NRO/MSD | Aeneas | USC, Marina Del Ray, CA | 3U | 3.7 | Cargo Tracking |
7 | NRO/MSD | Re | LLNL, Livermore, CA | 3U | 4.0 | Space Debris Mitigation |
4 | NASA/LSP | CSSWE | Univ of Colo/NSF | 3U | 3.5 | Space Weather |
5 | NASA/LSP (Launch Services Program) | CXBN | Morehead State University and Kentucky Space | 2U | 2.6 | Space Weather |
5 | NASA/LSP | CP5 | CalPoly, San Luis Obispo, CA | 1U | 1.1 | Debris Mitigation |
6 | NASA/LSP | CINEMA | NSF/UCB Berkeley | 3U | 2.8 | Space Environment |
The launch of all CubeSats is being conducted in a new container structure, referred to as NPSCuL(Naval Postgraduate School CubeSat Launcher). This new dispenser platform was designed and developed by students of NPS (Naval Postgraduate School) in Monterey, CA, to integrate/package P-PODs as secondary payloads.
NRO refers to all 11 secondary (or auxiliary) CubeSat payloads on NROL-36 as the OUTSat (Operationally Unique Technologies Satellite) mission using for the first time the NPSCuL platform as a container structure for the 8 P-PODs (Ref. 12).
Mission Status
• The project team at MSU and their partners tracked the CXBN satellite for 4.5 months (until the end of January 2013). The team collected some data and telemetry, but the SNR (Signal-to-Noise Ratio) was too low on most passes to allow the project to download a significant amount of data. Most of the technology demonstration objectives were met, but the team was not able to begin the science mission in earnest because of the weak transmit SNR owing to an anomalous low power mode.
The science objective of taking a 5% measurement of the diffuse X-ray background will be continued with CXBN-2. In February 2013, CXBN-2 was down-selected for a launch opportunity through the NASA ELaNa program. 13) 14)
• The ground station at MSU acquired the satellite beacon at 12:51 EDT on Sept. 18, 2012. The beacons appear exactly at the right frequency, correct bandwidth and correct beacon interval. 15)
Sensor complement
CZT (Cadmium Zinc Telluride) Array
The CZT array is the CXBN science instrument (or science array). It is a silicon-based X-ray and gamma-ray detector designed by Garrett Jernigan (MSU science PI) and built by Black Forest Engineering LLC of Colorado Springs, CO. The CZT array is optimized for response in the 30-50 keV energy range where the diffuse cosmic X-ray background peaks (Ref. 2).

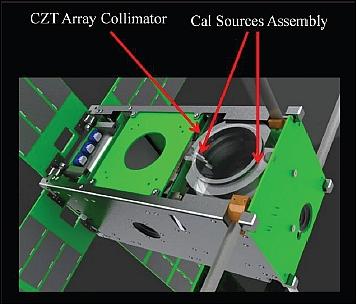
Legend to Figure 10: The CZT Array and high voltage power supply on development board (top left) housed in multi-layer high Z shielding (top right) mounted in an Al structure with a collimator (bottom) lined with high Z shielding.
The instrument is used in a variety of applications including as radiation detectors in the gamma ray and X-ray spectra. Radiation detectors using CZT can operate in direct-conversion (or photoconductive) mode at room temperature. Advantages of this technology include high sensitivity to X-rays and gamma-rays due to the high atomic numbers of Cd and Te, and better energy resolution than scintillator detectors. The CZT array payload is a novel, 16 x 32 grid, low-power sensor with 600 x 600 µm pixels and 1keV energy resolution at an energy of 60 keV. A 5 mm thickness provides a very ample interaction volume for incoming gammas. Figure 10 shows the detector array along with a high-Z multi-layered shielding box and field of view collimator. The collimator aperture was designed to define the appropriate field of view on the sky (~18º half angle) and contains two X-ray calibration sources (totaling 2 µCurie of Americium 241). Placement of the calibration sources within the collimator is shown in Figure 11.
The goal of this mission is to significantly increase the precision of measurements of the cosmic X-ray background in the 30-50 keV range, thereby constraining models that attempt to explain the relative contribution of proposed sources lending insight into the underlying physics of the early universe. The mission addresses a fundamental science question that is clearly central to our understanding of the structure, origin, and evolution of the universe by potentially lending insight into both the high energy background radiation and into the evolution of primordial galaxies.
Investigations of the X-ray spectrum necessitate using space platforms because of the severe attenuation of radiation in this frequency range by the Earth’s atmosphere, therefore requiring orbital flight opportunities to perform this kind of science. The CXBN will map the extragalactic DXRB (Diffuse X-ray Background) with a new breed of CZT detector. The DXRB is a powerful tool for understanding the early universe and provides a window to the most energetic objects in the far-away universe. Although studied previously, existing measurements disagree by about 20%. With the novel CZT detector aboard the CXBN, a new, high precision measurement is possible. In ~1 year of operation the experiment will have collected 3 million seconds of good data, reaching a broadband SNR (Signal-to-Noise Ratio) of ~250.
Ground segment
All ground operations supporting CXBN from launch, to early operations (LEOP) through primary mission operations and de-orbit procedures will be managed by the Morehead State University SOC (Space Operations Center).
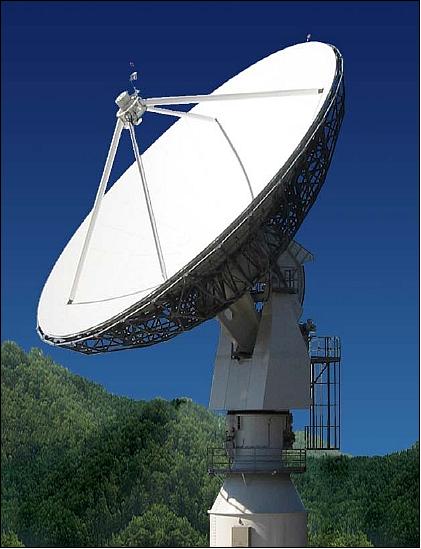
SOC will operate several ground stations, including low bandwidth VHF/UHF systems and a multi-frequency 21 m aperture dish antenna, an existing infrastructure at MSU (Figure 12). The antenna serves also as a testbed for experimental communication systems of small satellites.
The antenna is being upgraded with low C-band and VHF feeds. The CXBN project is also developing a UHF feed for the 21 m antenna.
RF (Radio Frequency) band | Bandwidth range |
L-band | 1.4 -1.7 GHz |
S-band | 2.2 -2.5 GHz |
High C-band | 7.0 - 7.8 GHz |
Ku-band | 11.2 - 12.7 GHz |
The MSU SOC will be utilized for scheduling, command sequence generation, satellite housekeeping, orbit tracking, and science data acquisition. Scheduling and commanding of the satellite will be carried out by ground station personnel that include a significant student workforce component.
CXBN has several different modes of operation. They include failure recovery beacon, standby beacon/uplink, downlink, and full science acquisition modes. The failure recovery mode is the most conservative mode which attempts to minimize power usage by emitting a low power beacon with health and status information. The standby beacon/uplink mode will broadcast a beacon with a complete telemetry set with current science data interleaved. In downlink mode, the spacecraft will send historical science data. Finally the science mode will collect and store data as scheduled for later retrieval. Once the science mission is completed the spacecraft will be full time dedicated to the amateur community for repeater service.
RF parameter | L-band | S-band | C-band | Ku-band |
Frequency | 1.40 GHz | 2.4-2.7 GHz | 7.1-7.6 GHz | 11.2 GHz |
Antenna gain | 47.80 dBi | 52.8 dBi | 62.0 dBi | 65.50 dBi |
System temperature, Tsys | 25 K | 215 K | 215 K | 70 K |
No | 83.8 K | -175 dBm/Hz | -175 dBm/Hz | 139.9 K |
G/T at 5º elevation | 28.6 dBi/K | 29.5 dBi/K | 38.7 dBi/K | 44.1 dBi/K |
HPBW (Half Power Beamwidth) | 0.62º | 0.37º | 0.13º | 0.08º |
In addition to the 21 m antenna, the CXBN project has also the availability of two Yagi-based Earth stations for UHF transmissions. In the CXBN scenario, four spacecraft passes/day can be received during windows of ~ 10 minute durations.
References
1) Tyler G. Rose, Benjamin K. Malphrus, Kevin Z. Brown, “An Improved Measurement of the Diffuse X-Ray Background: The Cosmic X-Ray Background Nanosat (CXRN,” 8th Annual CubeSat Developers’ Workshop, CalPoly, San Luis Obispo, CA, USA, April 20-22, 2011, URL: http://www.cubesat.org/images/2011_Spring_Workshop/thur_a9.30_rose_cxbn_cswkshp_sp2011.pdf
2) Tyler Rose, “Cosmic X-ray Background NanoSat Preflight,” 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/16-Rose-Cosmic_X-ray.pdf
3) Kevin Z. Brown, Tyler G. Rose, Benjamin K. Malphrus, Jeffrey A. Kruth, Eric T. Thomas, Michael S. Combs, Roger McNeil, Robert T. Kroll, Benjamin J. Cahall, Tyler T. Burba, Brandon L. Molton, Margaret M. Powell, Jonathan F. Fitzpatrick, Daniel C. Graves, J. Garrett Jernigan, Lance Simms, John P. Doty, Matthew Wampler-Doty, Steve Anderson, Lynn R. Cominsky, Kamal S. Prasad, Stephen D. Gaalema, Shunming Sun, “The Cosmic X-Ray Background NanoSat (CXBN): Measuring the Cosmic X-Ray Background Using the CubeSat Form Factor,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-VII-6
4) Kevin Brown, Ben Malphrus,Tyler Rose, Roger McNeil, Jeff Kruth, Robert Twiggs, Eric Thomas,Robert Kroll, Michael Combs, Luke Liem, Jonathan Fitzpatrick, Ben Cahall, Tyler Moore, Justin Hamilton, Clay Graves, Tyler Burba, Brandon Molton, Garrett Jernigan, Lance Simms, John Doty, Lynn Cominsky, Kamal Prasad, Steve Anderson, Twyman Clements, “The Cosmic X-Ray Background Nanosatellite: An Improved Measurement of the Diffuse X-Ray Background,” URL: http://www.moreheadstate.edu/.../Space_Science_Center/CXBN%20Poster.2012.v.2.pdf
5) http://www.astrodev.com/public_html2/downloads/datasheet/LithiumUserManual.pdf
6) “Morehead State University Scientists Develop Satellite for 2012 NASA Launch,” January 10, 2012, URL: http://satellite.tmcnet.com/topics/satellite/articles/253804-morehead-state-university-scientists-develop-satellite-2012-nasa.htm
7) “Atlas V launches on classified Flight to orbit NROL-36 Payload,” Spaceflight 101, Sept. 14, 2012, URL: http://www.spaceflight101.com/nrol-36-launch-updates.html
8) “2012 in Spaceflight,” Wikipedia, URL: http://en.wikipedia.org/wiki/2012_in_spaceflight
9) “CubeSat ELaNa-IV launch on L-36 Mission,” NASA, URL: http://www.nasa.gov/pdf/687141main_CubeSat_fact_sheet_ELaNa_VI.pdf
10) Garret Skrobot, “ELaNa - Educational Launch of Nanosatellite,” 8th Annual CubeSat Developers’ Workshop, CalPoly, San Luis Obispo, CA, USA, April 20-22, 2011, URL: https://web.archive.org/web/20190716170813/http://mstl.atl.calpoly.edu:80/~bklofas/Presentations/DevelopersWorkshop2011/21_Skrobot_ELaNa.pdf
11) Guy Mathewson, “2012 CubeSat Workshop, OSL’s Vision & Mission,” 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/01-Mathewson-Keynote.pdf
12) Travis Willcox, “Office of Space Launch Atlas V Aft Bulkhead Carrier & Operationally Unique Technologies Satellite,” 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/35-Wilcox-NationalReconsisanceOffice.pdf
13) Information provided by Benjamin K. Malphrus, Chair, Department of Earth and Space Sciences, Space Science Center, Morehead State University, Morehead, KY, USA.
14) “CubeSat Selections,” NASA, Feb. 28, 2013, URL: http://www.nasa.gov/directorates/heo/home/CSLI_selections.html
15) “First contact made with Kentucky-built satellite CXBN,” The Morehead News, Oct. 2012, URL: http://themoreheadnews.com/msunews/x62494746/First-contact-made-with-Kentucky-built-satellite-CXBN
16) B. Malory's, K.Z. Brown, B. Twiggs, “A University-Based Ground Station: The 21 m Antenna at More head State University,” 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: https://web.archive.org/web/20190716180420/http://mstl.atl.calpoly.edu:80/~bklofas/Presentations/DevelopersWorkshop2012/Panel_Malphrus.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).