CUTE-I
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
CUTE-I (Cubical Tokyo Tech Engineering Satellite-I)
CUTE-I is a cooperative project within the CubeSat program between LSS (Laboratory for Space Systems) of the Tokyo Institute of Technology (TITech) and SRTL (Space Robotics and Teleoperations Laboratory) of Tokyo. The objectives call for a student designed and developed picosatellite using a low-cost approach with COTS components. In fact, student involvement is required in all project phases. The project definition considers the following mission functions: 1) 2)
1) Communication mission, involving:
- Continuous transmission of CW-Telemetry by a CW-transmitter (operated as a beacon)
- Transmission of FM-Telemetry including payload (housekeeping) data by two different protocols [AX.25 protocol, and SRLL(Simple Radio Link Layer) protocol]. Note: SRLL employs 32 byte fixed-length data packets and provides the function of error correction. Comparison of the two protocols.
- Change of the two communication protocols by uplink command from ground station
2) Sensing mission: Monitoring and control of all onboard sensors like: thermometers, accelerometers, gyros, sun sensor, in short: housekeeping data.
3) Deployment mission: Monitoring and control of the solar panel deployment.

Spacecraft
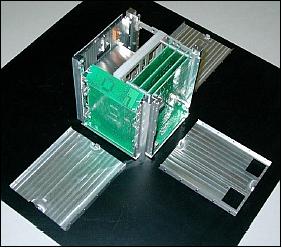
The spacecraft structure conforms to the requirements of the CubeSat program in size and mass (1U form factor). The main structure consists of four pillars and walls as shown in Figure 2.
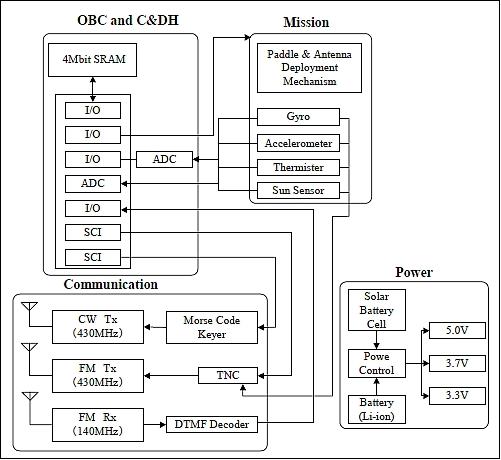
The ACS (Attitude Control Subsystem) features four small piezoelectric vibrating gyroscopes, four small accelerometers, thermometers and a CMOS sun sensor developed by LSS. The data of the gyroscopes, accelerometers and the CMOS sun sensor are used to estimate on the ground the CUTE-I attitude.
The sensor subsystem aims at acquiring attitude and thermal data of CUTE-I. This subsystem consists of two circuit boards shown in Figure 3. They are placed perpendicularly to each other in the CUTE-I structure. Each gyroscope can measure one axis angular velocity, so that CUTE-I can measure four axes angular velocity in total. Each accelerometer can measure two axes acceleration, so that CUTE-I can measure four axes acceleration. Acceleration data can also be translated into the angular velocity in order to compare with the data of the gyroscopes.
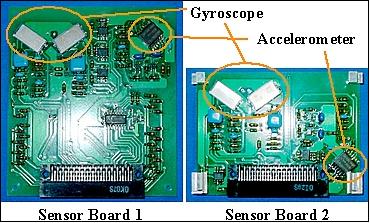
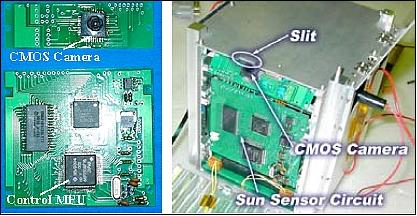
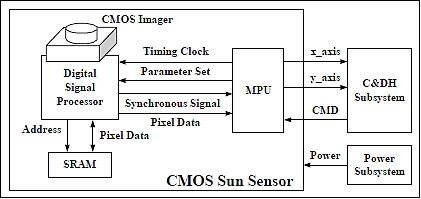
Figure 4 shows the CMOS Sun sensor circuit board. This sensor consists of a CMOS camera, a control MPU and so on. Figure 5 provides the block diagram of this sensor. The CMOS imager gets an image of space. If the sun is on the image, the luminance of the pixel, which the image data has, is very high. The sensor outputs a sun position on the image with the highest luminance pixel. The ground station calculates the sun angle on the body coordinates of CUTE-I by use of the sun position on the image.
EPS (Electrical Power Subsystem): Power is provided by surface-mounted solar cells (silicon, power of 1.5 W, bus voltage of 5 V, 3.8 V for transmitter) and by a deployable solar panel. Lithium-ion batteries are used for eclipse operations (1.4 Ah).
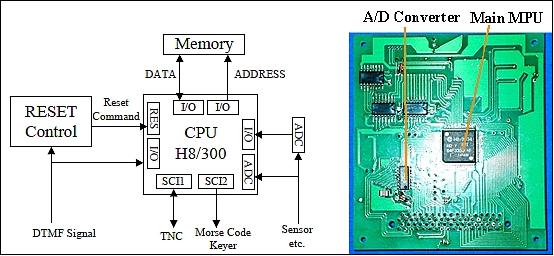
C&DHS (Command and Data Handling Subsystem): Figure 6 shows the block diagram of the C&DHS. CUTE-I has an 8 bit MPU as a main MPU and a 4 Mbit SRAM as a main data storage. This MPU has 8 channels and features an A/D converter. Use of 24 channels to accommodate all the sensor data. The main MPU stores 32 bytes of sensor data per sampling. The sampling rate can be changed by command from 100 ms intervals to 3 minute intervals. In case of reading the memory data and transmitting them, the main MPU sends 32 byte data as one packet to the communication subsystem. An interval of sending data can be changed from 1s to 30 s by command.
RF communications: The communication is based on amateur radio standards. The downlink frequency is in UHF (430 MHz band). The uplink is in VHF (144 MHz). The AX.25 or SRLL protocols are used, modulation = Bell 202, data rate = 1.2 kbit/s. CW telemetry is used to be able to find the satellite on each pass. The telemetry data are stored in an onboard memory or are output to a TNC (Terminal Node Controller) to transmit them to the ground stations. The satellite is being operated by the TI-Tech ground station. In addition, anyone with an amateur radio station is able to receive CUTE-I telemetry.
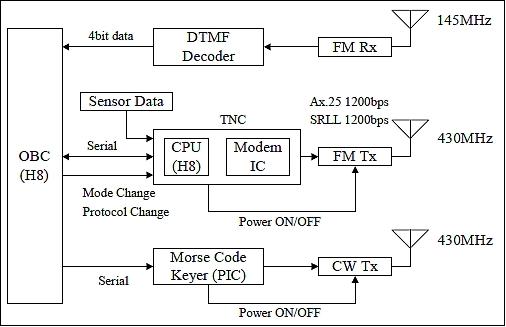
Communication subsystem | Tx1 | CW transmitter output, 100 mW |
Tx2 | FM transmitter output 350 mW | |
Rx | FM receiver | |
Antenna | Monopole x 3 | |
TNC | Ax.25 1200 bit/s (FSK) | |
Ax.25 1200 bit/s (FSK) | ||
MPU: H8/300 | ||
CW Keyer | MPU: PIC | |
Attitude sensors | Gyro (4) | 4 axis |
Accelerometer | 4 axis | |
Sun sensor (CMOS type) | Original | |
Thermistor | 15 points | |
C&DH (Command and Data Handling) | MPU | H8/300 |
Memory | 4Mbit SRAM | |
EPS (Electrical Power Subsystem) generates voltages at 5.0 V, 3.7 V, and 3.3 V) | Battery | Lithium-ion |
Solar cells | Silicon |

Launch
The CUTE-I picosatellite was part of the first multiple launch CubeSat mission, involving some 6 Cubesats as secondary payloads, and a primary commercial payload, took place June 30, 2003. The launch vehicle was Rockot KS of Eurockot Launch Services (Bremen, Germany) from the launch site Plesetsk, Russia with the following secondary payloads:
• XI (X-factor Investigator) of the University of Tokyo, Japan
• CUTE-I of Tokyo Institute of Technology (TITech), Tokyo, Japan
• CanX-1 of the University of Toronto, Toronto, Canada
• AAUSat of Aalborg University, Aalborg, Denmark
• DTUSat of the Technical University of Denmark, Lyngby, Denmark
• QuakeSat of Stanford University, Stanford, CA, USA (3U CubeSat form factor with a total mass of about 4.5 kg)
The primary payloads on this mission were:
• MIMOSA of the Czech Astronomical Institute, Ondrejov, Czech Republic with a launch mass of 66 kg
• MOST (Microvariability and Oscillations of Stars) of CSA (Canadian Space Agency), Saint-Hubert, Quebec with a launch mass of 51 kg
• Monitor E mock-up of GKNPT Khrunichev Space Center, Moscow, Russia with a mass of 700 kg. The payload Monitor-E remains on the upper stage of the launch vehicle.
The deployment strategy of Rockot KS employed MOM (Multiple Orbit Mission), based on the multiple re-ignition capability of its Breeze upper stage. Initially, the MIMOSA payload was being deployed into an elliptical orbit of 820 km x 320 km. After another impulse maneuver of the main engine, Breeze then deployed MOST, followed by the CubeSats into a sun-synchronous orbit of 820 km near-circular altitude at pre-determined intervals. The Monitor-E mock-up will remain on the upper stage and will de-orbit together with Breeze into the atmosphere.
The CubeSat launch was coordinated by UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory) for CanX-1, AAUSat and DTUSat. A single P-POD of CalPoly was used for XI and CUTE-I as well as for CanX-1, AAUSat and DTUSat. This integrated system was dubbed NLS-1 (Nanosatellite Launch System-1). The second launch system, NLS-2, consisted of QuakeSat and its own dedicated P-POD.
CubeSat orbits: Circular sun-synchronous orbit, mean altitude = 820 km, inclination = 98.73º, local equator crossing time at 6:00 and 18:00.
Mission Status
• The CUTE-I picosatellite is operating in 2012. The CW beacon is providing health checks. The long operational life of CUTE-I represents a great accomplishment for all involved in the project.
• In 2011, the CUTE-I picosatellite is still operating after more than eight years on orbit. 3)
• Fall 2005: The project has been operating the CUTE-I spacecraft for over 2-years without remarkable troubles since the launch. This fact shows the potentials of picosatellite regarding the lower developing and launching cost, the short term of the development, and abundant launching opportunities by piggy-back launch. 4)
• CUTE-1 is operational as of July 2004. CUTE-I was in a stable spin gradually until early November 2003, because the rotation speed of CUTE-I was slow. CUTE-I was beginning to be unstable since the middle of November. One of the reasons is the internal energy dissipation effects, e.g. an elastic structural deflection of antennas, solar cell paddle and internal harness of CUTE-I on board electronics.
• Sensor tests in 2003: All onboard sensors work well.
- Downlink SRAM data (immediately after separation) was conducted successfully
- Transmission of FM packet (SRLL, 1200 bit/s) was conducted successfully by uplinked command
- Transmission of FM packet (AX.25, 1200 bit/s) was conducted successfully by uplinked command
- Transmission of CW beacon, onboard-Rx works well
- Antennas and solar cell paddle were deployed successfully
- Successful launch on June 30 2003.
References
1) K. Omagari, K. Konoue, H. Sawada, K. Nakaya, K. Ui, M. Iai, N. Miyashita, T. Urabe, et al., “Tokyo Tech 1 kg Picosatellite CUTE-1 - Development, Launch & Operations,” 16th IFAC Symposium on Automatic Control in Aerospace, June 14-18, 2004, Saint Petersburg, Russia
2) Koji Nakaya, Kazuya Konoue, Hirotaka Sawada, Kyoichi Ui, Hideto Okada, Naoki Miyashita, Masafumi Iai, Tomoyuki Urabe, Nobumasa Yamaguchi, Munetaka Kashiwa, Kuniyuki Omagari, Ikutaro Morita and Saburo Matunaga, “Tokyo Tech CubeSat: CUTE-I - Design & Development of Flight Model and Future Plan,” AIAA 21st International Communications Satellite Systems Conference and Exhibit, Yokohama, Japan 2003, URL: http://lss.mes.titech.ac.jp/ssp/cubesat/paper/AIAA_TokyoTechCubeSat.pdf
3) Saburo Matsunaga, “The challenge for ultra-small satellites - aiming at great innovation in space science,” URL: http://www.isas.jaxa.jp/e/forefront/2011/matsunaga/index.shtml
4) Naoki Miyashita, Saburo Matunaga, “DEevelopment of Autonomous Distributed Ground Operation System for Picosatellites under low baud-rate Communications,” Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space - iSAIRAS’, Munich, Germany, Sept, 5-8, 2005, (ESA SP-603, August 2005, URL: http://robotics.estec.esa.int/i-SAIRAS/isairas2005/session_05c/4_miyashita_5c.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates.