Copernicus: Sentinel-3
EO
ESA
Atmosphere
Ocean
Sentinel-3 (S3) is a constellation of two radar imaging satellites operated by the European Space Agency (ESA) and supported by EUMETSAT (European Organisation for the Exploitation of Meteorological Satellites). Both S3A, launched in February 2016, and S3B, launched in April 2018, are part of Copernicus - the European Union’s Earth observation program, managed by the European Commission (COM).
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, EUMETSAT, COM |
| Mission status | Operational (nominal) |
| Launch date | 16 Feb 2016 |
| Measurement domain | Atmosphere, Ocean, Land, Gravity and Magnetic Fields, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Atmospheric Temperature Fields, Cloud particle properties and profile, Ocean colour/biology, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Gravity, Magnetic and Geodynamic measurements, Surface temperature (ocean), Atmospheric Humidity Fields, Landscape topography, Ocean topography/currents, Sea ice cover, edge and thickness, Ocean surface winds, Ocean wave height and spectrum, Ice sheet topography |
| Measurement detailed | Precipitation Profile (liquid or solid), Atmospheric pressure (over sea surface), Ocean imagery and water leaving spectral radiance, Ocean chlorophyll concentration, Cloud cover, Cloud optical depth, Aerosol optical depth (column/profile), Color dissolved organic matter (CDOM), Cloud base height, Aerosol Extinction / Backscatter (column/profile), Land surface imagery, Aerosol effective radius (column/profile), Fire temperature, Vegetation type, Fire fractional cover, Earth surface albedo, Leaf Area Index (LAI), Land cover, Atmospheric specific humidity (column/profile), Land surface temperature, Sea surface temperature, Land surface topography, Ocean suspended sediment concentration, Sea-ice cover, Wind speed over sea surface (horizontal), Normalized Differential Vegetation Index (NDVI), Sea-ice thickness, Volcanic ash, Significant wave height, Photosynthetically Active Radiation (PAR), Geoid, Fraction of Absorbed PAR (FAPAR), Sea level, Ocean dynamic topography, Sea-ice sheet topography, Sea-ice surface temperature, Atmospheric pressure (over land surface), Diffuse attenuation coefficient (DAC) |
| Instruments | OLCI, SRAL, SLSTR, DGXX-S |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Precision orbit, Radar altimeters |
| CEOS EO Handbook | See Copernicus: Sentinel-3 summary |
Related Resources

Summary
Mission Capabilities
The S3 satellites measure sea-surface topography, as well as the colour and temperature of ocean and land surfaces. This data is used for ocean systems forecasting, environmental monitoring, and climate monitoring.
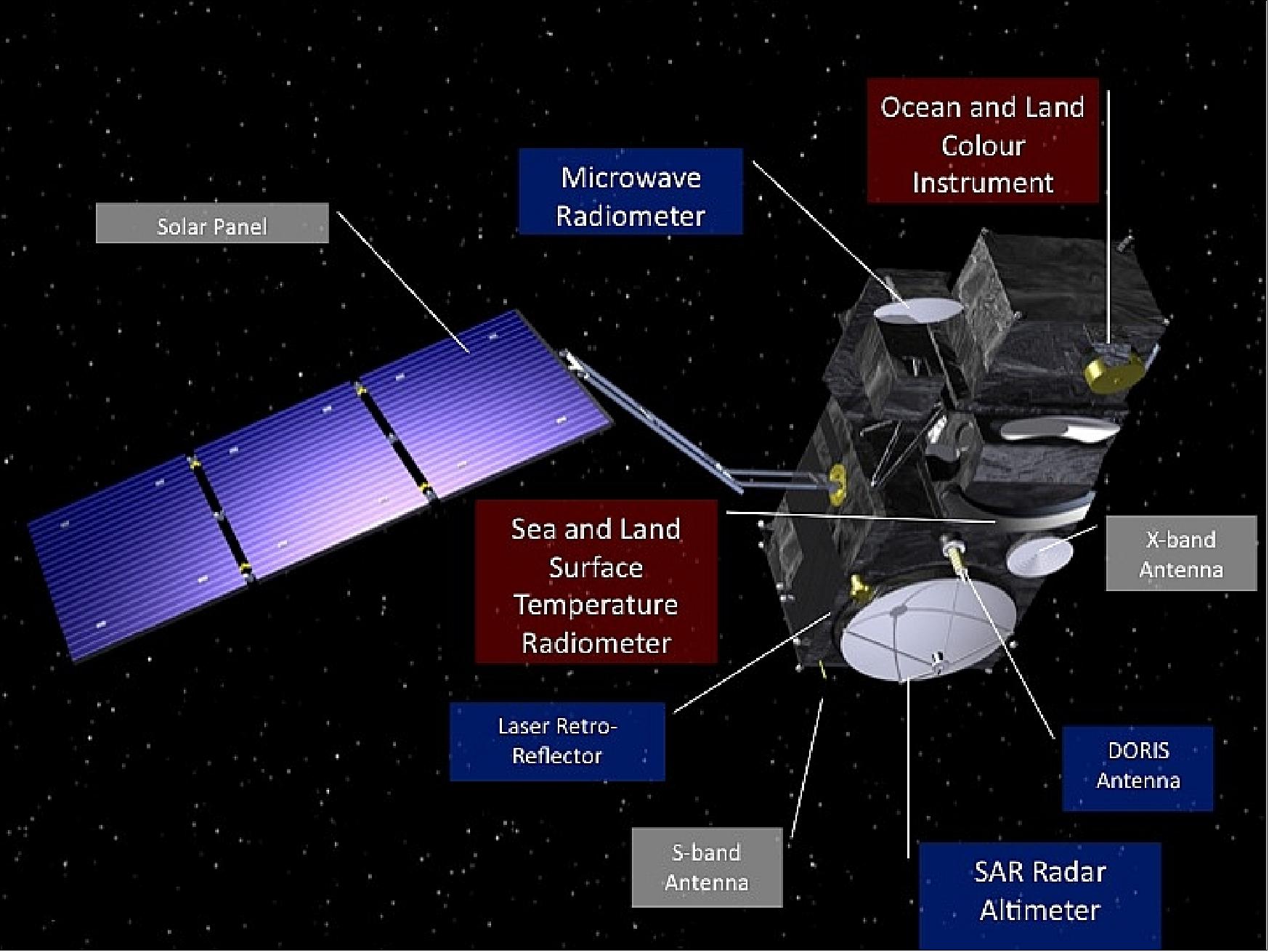
Both satellites are identical and have three instruments on board: an imaging multispectral radiometer and ocean colour instrument - the Ocean and Land Colour Imager (OLCI); another imaging radiometer - the Sea and Land Surface Temperature Radiometer (SLSTR); and a radar altimeter - the SAR (Synthetic Aperture Radar) Radar Altimeter (SRAL), which is complemented by a Microwave Radiometer (MWR). MWR complements SRAL by monitoring the water vapour and cloud water contents in its field of view to enable data correction.
Performance Specifications
OLCI has 21 spectral bands ranging over VNIR (visual and near-infrared) and SWIR (short-wave infrared), with a spatial resolution of 300 m for all bands and a swath of 1270 km. The division of the field of view between five cameras allows for such a large swath. OLCI is angled 12.2° away from the sun to minimise the effect of sunglint. SLSTR has 11 spectral bands: the VNIR and SWIR channels have three bands each with a resolution of 500 m, and the MWIR (medium wave infrared) and TIR (thermal infrared) channels cover five bands with a spatial resolution of 1 km. When observing nadir, SLSTR has a swath of 1420 km and when facing backwards has a swath of 750 km. SRAL operates in both C-band and Ku-band with a resolution of 300 m, while MWR operates in both K-band and Ka-band.
The two S3 satellites follow the same sun-synchronous orbit with an inclination of 98.65° but are 180° out of phase. They orbit at an altitude of 807 km with a period of 101 minutes. The revisit time is less than or equal to four days (varies with latitude), with the cycle repeating every 27 days.
Space and Hardware Components
The other key instrument onboard is the Precise Orbit Determination (POD) package, consisting of a Global Navigation Satellite Systems (GNSS) receiver, a Doppler Orbit determination and Radio-positioning Integrated on Satellite (DORIS) instrument, as well as a Laser Retro-Reflector (LRR). The GNSS receiver contributes to satellite control and accurate onboard timing; the DORIS is a precise satellite tracking system that uses the Doppler effect and the exact position of the satellite to calculate the satellite's orbit; while the LRR reflects any laser pulses sent from ground stations so they can accurately measure their distance from the satellite.
S3C and S3D are expected to launch in 2024 and 2028 respectively to provide continuity to the S3 missions after S3A and S3B reach their end of life, expected in 2026 and 2028 respectively.
Copernicus: Sentinel-3 — Global Sea/Land Monitoring Mission including Altimetry
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
The Sentinel-3 (S3) mission of ESA and the EC is one of the elements of the GMES (Global Monitoring for Environment and Security) program, which responds to the requirements for operational and near-real-time monitoring of ocean, land and ice surfaces over a period of 20 years. The topography element of this mission will serve primarily the marine operational users but will also allow the monitoring of sea ice and land ice, as well as inland water surfaces, using novel observation techniques.The Sentinel-3 mission is designed as a constellation of two identical polar orbiting satellites, separated by 180º, for the provision of long-term operational marine and land monitoring services. The operational character of this mission implies a high level of availability of the data products and fast delivery time, which have been important design drivers for the mission. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
The Sentinel-3 program represents a series of operational spacecraft over the envisioned service period to guarantee access to an uninterrupted flow of robust global data products.
Copernicus is the new name of the former GMES program 15)
Copernicus is the new name of the European Commission's Earth Observation Programme, previously known as GMES (Global Monitoring for Environment and Security). The new name was announced on December 11, 2012, by EC (European Commission) Vice-President Antonio Tajani during the Competitiveness Council.
In the words of Antonio Tajani: “By changing the name from GMES to Copernicus, we are paying homage to a great European scientist and observer: Nicolaus Copernicus (1473-1543). As he was the catalyst in the 16th century to better understand our world, so the European Earth Observation Programme gives us a thorough understanding of our changing planet, enabling concrete actions to improve the quality of life of the citizens. Copernicus has now reached maturity as a programme and all its services will enter soon into the operational phase. Thanks to greater data availability user take-up will increase, thus contributing to that growth that we so dearly need today.”
The main observation objectives of the mission are summarized in the following list:
• Ocean and land color observation data, free from sun-glint, shall have a revisit time of 4 days (2 days goal) and a quality at least equivalent to that of Meris instrument on Envisat. The actual revisit obtained over ocean at the equator (worst case) is less than 3.8 days with a single satellite and drops below 1.9 days with 2 satellites, phased 180° on the same orbital plane.
• Ocean and land surface temperature shall be acquired with at least the level of quality of AATSR on Envisat, and shall have a maximum revisit time of 4 days with dual view (high accuracy) observations and 1 day with single view. Achieved performance is shown to be significantly better, even with a single satellite (dual view: 3.5 days max, 1.8 days average).
• Surface topography observations shall primarily cover the global ocean and provide sea surface height (SSH) and significant wave height (SWH) to an accuracy and precision at least equivalent to that of RA-2 on Envisat. Additionally, Sentinel-3 shall provide surface elevation measurements -in continuity to CryoSat-2 - over ice regions covered by the selected orbit, as well as measurements of in-land water surfaces (rivers and lakes).
In addition, Sentinel-3 will provide surface vegetation products derived from synergistic and co-located measurements of optical instruments, similar to those obtained from the Vegetation instrument on SPOT, and with complete Earth coverage in 1 to 2 days.
The EU Marine Core Service (MCS) and the Land Monitoring Core Service (LMCS), together with the ESA GMES Service Element (GSE), have been consolidating those services where continuity and success depends on operational data flowing from the Sentinels.
The operational character of the mission implies a high level of availability of the data products and fast delivery time, which have been important design drivers for the mission.

Legend to Figure 1: Sentinel-3 is arguably the most comprehensive of all the Sentinel missions for Europe’s Copernicus programme. Carrying a suite of state-of-the-art instruments, it provides systematic measurements of Earth’s oceans, land, ice and atmosphere to monitor and understand large-scale global dynamics and provide critical information for ocean and weather forecasting.
Spacecraft
The Sentinel-3 spacecraft is being built by TAS-F (Thales Alenia Space-France). A contract to this effect was signed on April 14, 2008. The spacecraft is 3-axis stabilized, with nominal pointing towards the local normal and yaw steering to compensate for the Earth rotation affecting the optical observations. The spacecraft has a launch mass of about 1150 kg, the height dimension is about 3.9 m. The overall power consumption is 1100 W. The design life is 7.5 years, with ~100 kg of hydrazine propellant for 12 years of operations, including deorbiting at the end.
AOCS (Attitude and Orbit Control Subsystem): The spacecraft is 3-axis stabilized based on the new generation of avionics for the TAS-F LEO (Low Earth Orbit) platform. The AOCS software of the GMES/Sentinel-3 project is of PROBA program heritage. NGC Aerospace Ltd (NGC) of Sherbrooke, (Québec), Canada was responsible for the design, implementation and validation of the autonomous GNC (Guidance, Navigation and Control) algorithms implemented as part of the AOCS software of PROBA-1, PROBA-2, and PROBA-V. 17)
Spacecraft launch mass, design life | ~1150 kg, 7.5 years (fuel for additional 5 years) |
Spacecraft bus dimensions | 3.9 m (height) x 2.2 m x 2.21 m |
Spacecraft structure | Build around a CFRP (Carbon Fiber Reinforced Plastics) central tube and shear webs |
AOCS (Attitude and Orbit Control Subsystem) | - 3 axis stabilization |
Pointing type | Geodetic + yaw steering |
Absolute pointing error | < 0.1º |
Thermal control | - Passive control with SSM radiators |
EPS (Electrical Power Subsystem) | - Unregulated power bus, with a Li-ion battery and GaAs solar array. |
Mechanisms | - Stepper motor SADM (Solar Array Drive Mechanism) |
Propulsion | - Monopropellant (hydrazine) operating in blow-down mode |
Data handling and software | Centralized SMU running applications for all spacecraft subsystems processing tasks, complemented by a PDHU (Payload Data Handling Unit) for instruments data acquisition and formatting before transmission to the ground segment. |
Operational autonomy | 27 days |
Data handling architecture: The requirements for the Sentinel-3 data handling architecture call for: a) minimized development risks, b) system at minimum cost, c) operational system over 20 years. This has led to design architecture as robust as possible using a single SMU (Satellite Management Unit) computer as the platform controller, a single PDHU (Payload Data-Handling Unit) for mission data management, and to reuse existing qualified heritage. 18)
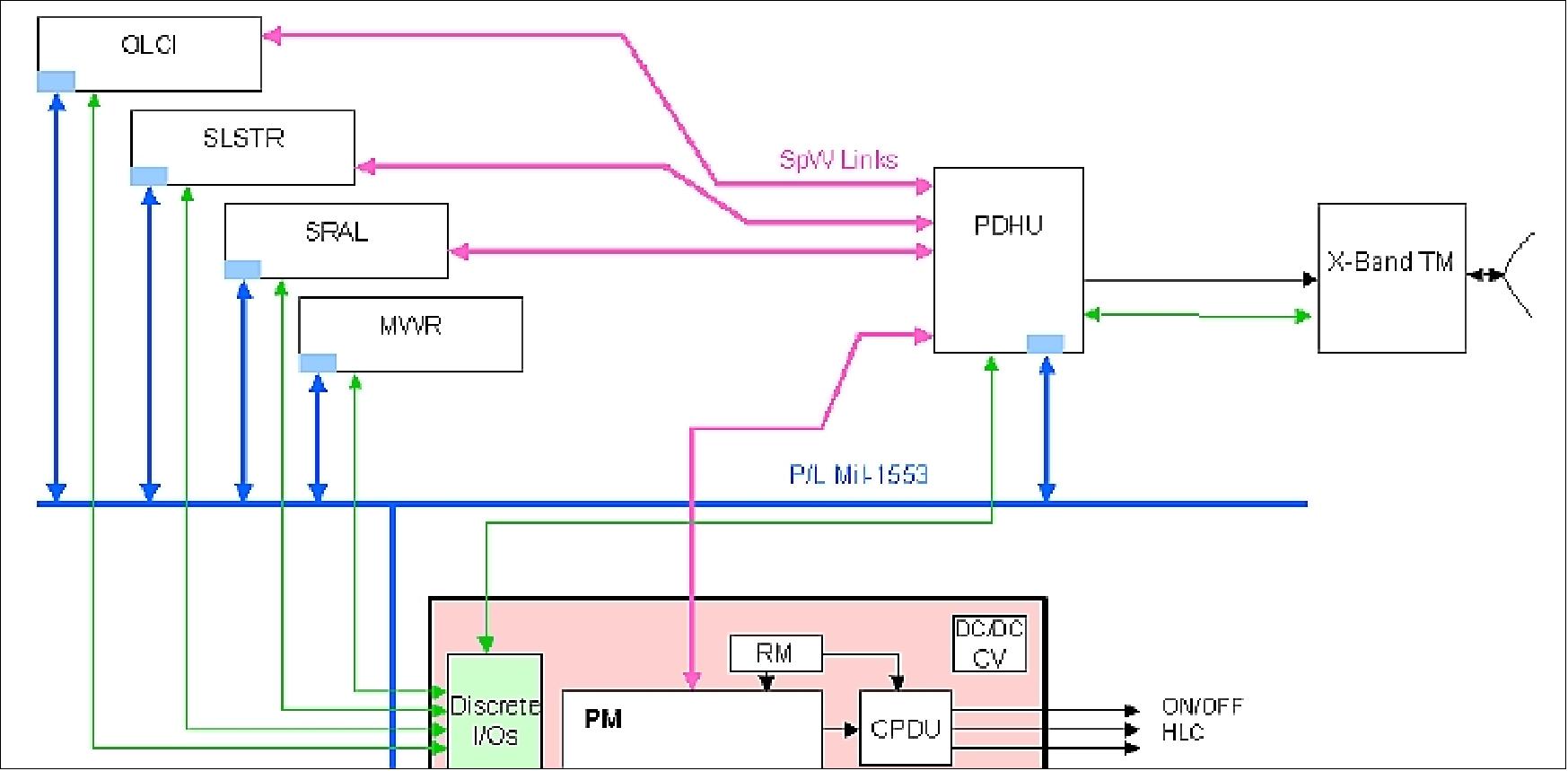
The payload accommodates 6 instruments, sources of mission data. The 3 high rate instruments provide mission data directly collected through the SpaceWire network, while the low rate instruments are acquired by the central computer for distribution through the SpaceWire network to the mass memory. The PDHU acquires and stores all mission data for latter multiplexing, formatting, encryption and encoding for download to the ground.
The payload architecture is built-up over a SpaceWire network (Figure 2) for direct collection of high rate SLSTR, OLCI and SRAL instruments and indirect collection of low rate MWR, GNSS and DORIS instrument data plus house-keeping data through the Mil-Std-1553 bus by the SMU, all data being acquired from SpaceWire links and managed by the PDHU.
The mission data budget is easily accommodated thanks to the SpaceWire performance. Each SpaceWire link being dedicated to point-to-point communication without interaction on the other links (no routing), the frequency is set according to the need plus a significant margin. The PDHU is able to handle the 4 SpaceWire sources at up to 100 Mbit/s.
All mission data sources (OLCI, SLSTR, SRAL and SMU) provide data through two cold redundant interfaces and harnesses. The PDHU, being critical as the central point of the mission data management, implements a full cross-strapping between nominal and redundant sources interfaces and its nominal and redundant sides.
The PDHU SpaceWire interfaces are performed thanks to a specific FPGA, the instrument’s ones are based on the ESA Atmel SMCS-332, while the SMU interfaces are implemented by an EPICA ASIC circuit developed by Thales Alenia Space.
RF communications: The S-band is used for TT&C transmissions The S-band downlink rate is 123 kbit/s or 2 Mbit/s, the uplink data rate is 64 kbit/s. The X-band provide the payload data downlink at a rate of 520 Mbit/s. An onboard data storage capacity of 300 Gbit (EOL) is provided for payload data.
Four categories of data products will be delivered: ocean color, surface topography, surface temperature (land and sea) and land. The surface topography products will be delivered with three timeliness levels: NRT (Near-Real Time, 3 hours), STC (Standard Time Critical, 1-2 days) and NTC (Non-Time Critical, 1 month). Slower products allow more accurate processing and better quality. NRT products are ingested into numerical weather prediction and seastate prediction models for quick, short term forecasts. STC products are ingested into ocean models for accurate present state estimates and forecasts. NTC products are used in all high-precision climatological applications, such as sealevel estimates.
The resulting analysis and forecast products and predictions from ocean and atmosphere adding data from other missions and in situ observations, are the key products delivered to users. They provide a robust basis for downstream value-added products and specialized user services.
Introduction of new technology: A newly developed MEMS rate sensor (gyroscope), under the name of SiREUS, will be demonstrated on the AOCS of Sentinel-3. The gyros will be used for identifying satellite motion and also to place it into a preset attitude in association with optical sensors after its separation from the launcher, for Sun and Earth acquisition. Three of the devices will fly inside an integrated gyro unit, each measuring a different axis of motion, with a backup unit ensuring system redundancy. Each unit measures 11 cm x 11 cm x 7 cm, with an overall mass of 750 grams. 19)
The SiREUS device is of SiRRS-01 heritage, a single-axis rate sensor built by AIS (Atlantic Inertial Systems Ltd., UK), which is using a ’vibrating structure gyro’, with a silicon ring fixed to a silicon structure and set vibrating by a small electric current. The SiRRS-01 MEMS gyro has been used in the automobile industry. These devices are embedded throughout modern cars: MEMS accelerometers trigger airbags, MEMS pressure sensors check tires and MEMS gyros help to prevent brakes locking and maintain traction during skids. - In a special project, ESA selected the silicon-based SiRRS-01 to have it modified for space use (and under the new name of SiREUS).


Status of Project Development
• May 04, 2020: During these unprecedented times of the COVID-19 lockdown, trying to work poses huge challenges for us all. For those that can, remote working is now pretty much the norm, but this is obviously not possible for everybody. One might assume that like many industries, the construction and testing of satellites has been put on hold, but engineers and scientists are finding ways of continuing to prepare Europe’s upcoming satellite missions such as the next Copernicus Sentinels. 21)
- Despite COVID-19, a milestone has been reached for the Copernicus Sentinel-3 mission, with the transport of the ‘D’ satellite platform from Thales Alenia Space in Rome, Italy, to Cannes in France.

- There are currently two Sentinel-3 satellites in orbit: Sentinel-3A and Sentinel-3B. They work as a pair to measure systematically Earth’s oceans, land, ice and atmosphere to monitor and understand large-scale global dynamics, and to provide essential information in near-real time for ocean and weather forecasting.
- To ensure continuity, they will eventually be replaced by Sentinel-3C and Sentinel-3D. Therefore, work is ongoing to prepare these next satellites.
- Nic Mardle, ESA’s Copernicus Sentinel-3 project manager, said, “At the start of the restrictions the Thales team in Italy worked particularly hard to try to complete everything for Sentinel-3D before a full lockdown was imposed. Single shifts with no hand-over allowed two teams to continue working on the satellite with no risk of infecting each other.
- “They were almost complete when the full shutdown of the facilities was announced, but this did not stop the Thales teams in Italy and in France and us at ESA, as we all continued by working remotely to get though the all-important ‘Delivery Review Board’.
- As soon as Thales’ facilities could be accessed again, the teams completed the few final activities including the packing and shipment preparations and finalized the necessary approvals from Italian and French governments, so that the satellite platform could be transported by road from Italy to France.
- Sentinel-3D arrived safely at the Cannes facilities in the night of 21 April and was unpacked by the Thales-Alenia Cannes team with the remote support from their colleagues in Rome.
- Nic added, “Activities are definitely more complicated in this period, but all teams are working together to facilitate the continuation of the program in the most efficient and pragmatic way, finding solutions to the new problems caused by the impacts the virus, while ensuring that the health and safety of the teams involved is ensured.”
- Josef Aschbacher, ESA’s Director of Earth Observation Programs, noted, “Everybody is working under extremely difficult circumstances and I’m really happy to see that work continues to prepare numerous new missions.
- “This is not only vital to ensure the continuity of measurements of our planet from space to understand and monitor environmental changes that are affecting society worldwide, but also we need to keep demonstrating new space technologies for the future. And, with COVID-19 affecting the economy so badly, we are making every effort to keep the space industry and downstream ventures in business.”
• April 13, 2018: The team of propulsion experts has spent two days carrying out the tricky task of fuelling the Copernicus Sentinel-3B satellite with 130 kg of hydrazine and pressurizing the tank for its life in orbit. 22) 23)
- Since hydrazine is extremely toxic, only specialists remained in the cleanroom for the duration. A doctor and security staff waited nearby with an ambulance and fire engine ready to respond to any problems.
- The satellite is scheduled for liftoff on 25 April from Russia’s Plesetsk Cosmodrome at 17:57 GMT (19:57 CEST).
- In orbit it will join its identical twin, Sentinel-3A, which was launched in 2016. This pairing of satellites provides the best coverage and data delivery for Copernicus.
- Sentinel-3B is the seventh Sentinel satellite to be launched for Copernicus. Its launch will complete the constellation of the first set of Sentinel missions for Europe’s Copernicus program.

• March 23, 2018: With the Sentinel-3B satellite now at the Plesetsk launch site in Russia and liftoff set for 25 April, engineers are steaming ahead with the task of getting Europe’s next Copernicus satellite ready for its journey into orbit. 24)
- After arriving at the launch site on 18 March, the satellite has been taken out of its transport container and is being set up for testing. Kristof Gantois, ESA’s Sentinel-3 engineering manager, said, “The satellite’s journey from France was hampered slightly by the freezing winter weather here in Russia, but it’s now safe in the milder cleanroom environment.
- Sentinel-3B will join its twin, Sentinel-3A, in orbit. The pairing of identical satellites provides the best coverage and data delivery for Europe’s Copernicus program – the largest environmental monitoring program in the world.
• February 2, 2018: After being put through its paces to make sure it is fit for life in orbit around Earth, the Copernicus Sentinel-3B satellite is ready to be packed up and shipped to Russia for liftoff. 25)
- Its twin, Sentinel-3A, has been in orbit since February 2016, systematically measuring our oceans, land, ice and atmosphere. The information feeds a range of practical applications and is used for monitoring and understanding large-scale global dynamics.
- The pairing of identical satellites provides the best coverage and data delivery for Europe’s Copernicus program – the largest environmental monitoring program in the world.
- Sentinel-3B has spent the last year at Thales Alenia Space’s premises in Cannes, France, being assembled and tested, and now it is fit and ready for its journey to the Plesetsk launch site in northern Russia.
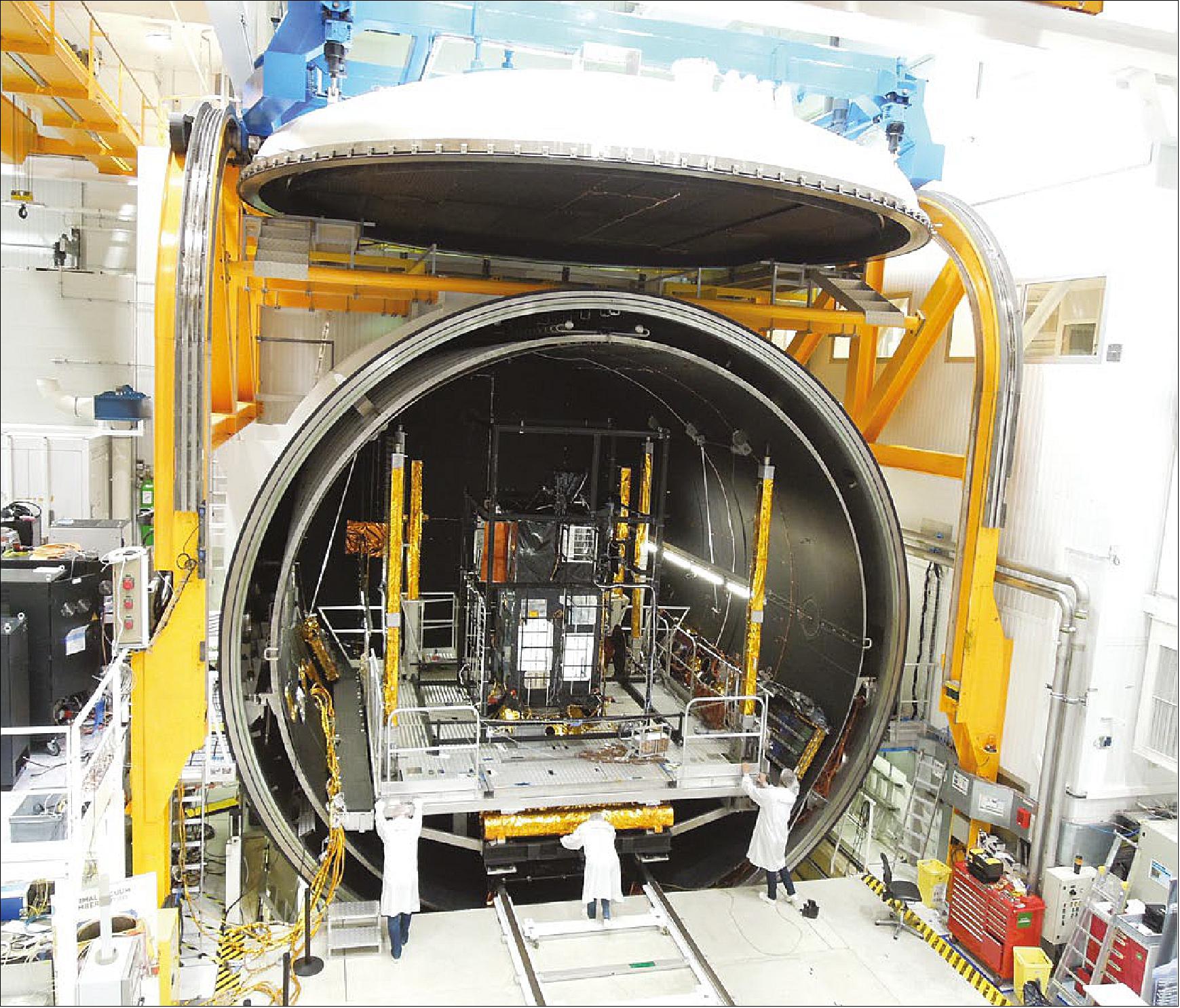
- This included putting it in a vacuum chamber, exposing it to extreme temperatures, and we have also simulated the vibrations it will be subjected to during launch. - With liftoff expected to be confirmed for the end of April, the satellite will start its journey to Russia in March.
- Both Sentinel-3 satellites carry a suite of cutting-edge instruments to supply a new generation of data products, which are particularly useful for marine applications. For example, they monitor ocean-surface temperatures for ocean and weather forecasting services, aquatic biological productivity, ocean pollution and sea-level change. — Sentinel-3B also marks a milestone in Europe’s Copernicus program.
- With the Sentinel-1 and Sentinel-2 pairs already in orbit monitoring our environment, the launch of Sentinel-3B means that three mission constellations will be complete. In addition, Sentinel-5P, a single-satellite mission to monitor air pollution, has been in orbit since October 2017.
- While the Sentinel-1 and Sentinel-2 satellites circle Earth 180° apart, the configuration for Sentinel-3 will be slightly different: the 140° separation will help to measure ocean features such as eddies as accurately as possible.
- Prior to this, however, they will fly just 223 km apart, which means that Sentinel-3B will be a mere 30 seconds behind Sentinel-3A.
- Flying in tandem like this for around four months is designed to understand any subtle differences between the two sets of instruments – measurements should be almost the same given their brief separation.
- ESA’s ocean scientist, Craig Donlon, explains, “Our Sentinel-3 ocean climate record will eventually be derived from four satellites because we will be launching two further Sentinel-3s in the future.
- “We need to understand the small differences between each successive satellite instrument as these influence our ability to determine accurate climate trends. The Sentinel-3 tandem phase is a fantastic opportunity to do this and will provide results so that climate scientists can use all Sentinel-3 data with confidence.”
• December 5, 2017: EUMETSAT has confirmed the readiness of its teams and the new version of its ground segment to support the launch and commissioning of the Copernicus Sentinel-3B satellite in a two-satellite configuration with Sentinel-3A. 26)
- The new version of the ground segment includes enhancements and upgrades necessary to exploit a dual Sentinel-3 system. Its acceptance follows a comprehensive campaign of verification and validation tests.
- During the commissioning of Sentinel-3B, the two Sentinel-3 satellites will fly in close formation, 30 seconds apart. In this phase, ESA will manage Sentinel-3B flight operations, and EUMETSAT will be progressively ramping up its flight control activity to prepare the hand-over, while continuing to perform flight operations of Sentinel-3A.
- The close formation flight will allow to compare thoroughly the measurements from all instruments aboard Sentinel-3A and –B, ensuring the best consistency between the products from the two satellites.
- The completion of commissioning will lead to a handover of the Sentinel-3B satellite from ESA to EUMETSAT once the latter has been moved to it final orbital position, at a 140º phasing from Sentinel-3A, to form the full Sentinel-3 constellation. The 140° phasing was chosen to optimize global coverage and ensure optimized sampling of ocean currents by the combined altimeters on board Sentinel-3A and -3B.
- Thus the Sentinel-3 constellation will also realize the best possible synergy with the cooperative Jason-3 high precision ocean altimeter mission, another Copernicus marine and climate mission exploited by EUMETSAT on behalf of the European Union.
- Under the Copernicus data policy, all Sentinel-3 marine data and products are available on a full, free and open basis to all users through EUMETSAT’s Near Real Time dissemination channels EUMETCast, the Copernicus Online Data Access and EUMETview.
• June 1, 2017: While the Copernicus Sentinel-3A satellite is in orbit delivering a wealth of information about our home planet, engineers are putting its twin, Sentinel-3B satellite through a series of vigorous tests before it is shipped to the launch site next year. It is now in the thermal–vacuum chamber at Thales Alenia Space’s facilities in Cannes, France. This huge chamber simulates the huge swings in temperature facing the satellite in space. Once this is over, the satellite will be put through other tests to prepare it for liftoff in the spring 2018. Both Sentinel-3 satellites carry the same suite of cutting-edge instruments to measure oceans, land, ice and atmosphere. 27)
• January 14, 2016: Following the Christmas break, the Sentinel-3A satellite has been taken out of its storage container and woken up as the campaign to prepare it for launch resumes at the Russian Plesetsk Cosmodrome. Liftoff is set for 4 February. 28)
• Nov. 20, 2015: The Sentinel-3A spacecraft has left France bound for the Plesetsk launch site in Russia and launch in late December. An Antonov aircraft carries the precious cargo to Arkhangelsk in Russia after a stopover in Moscow to clear paperwork. 29)
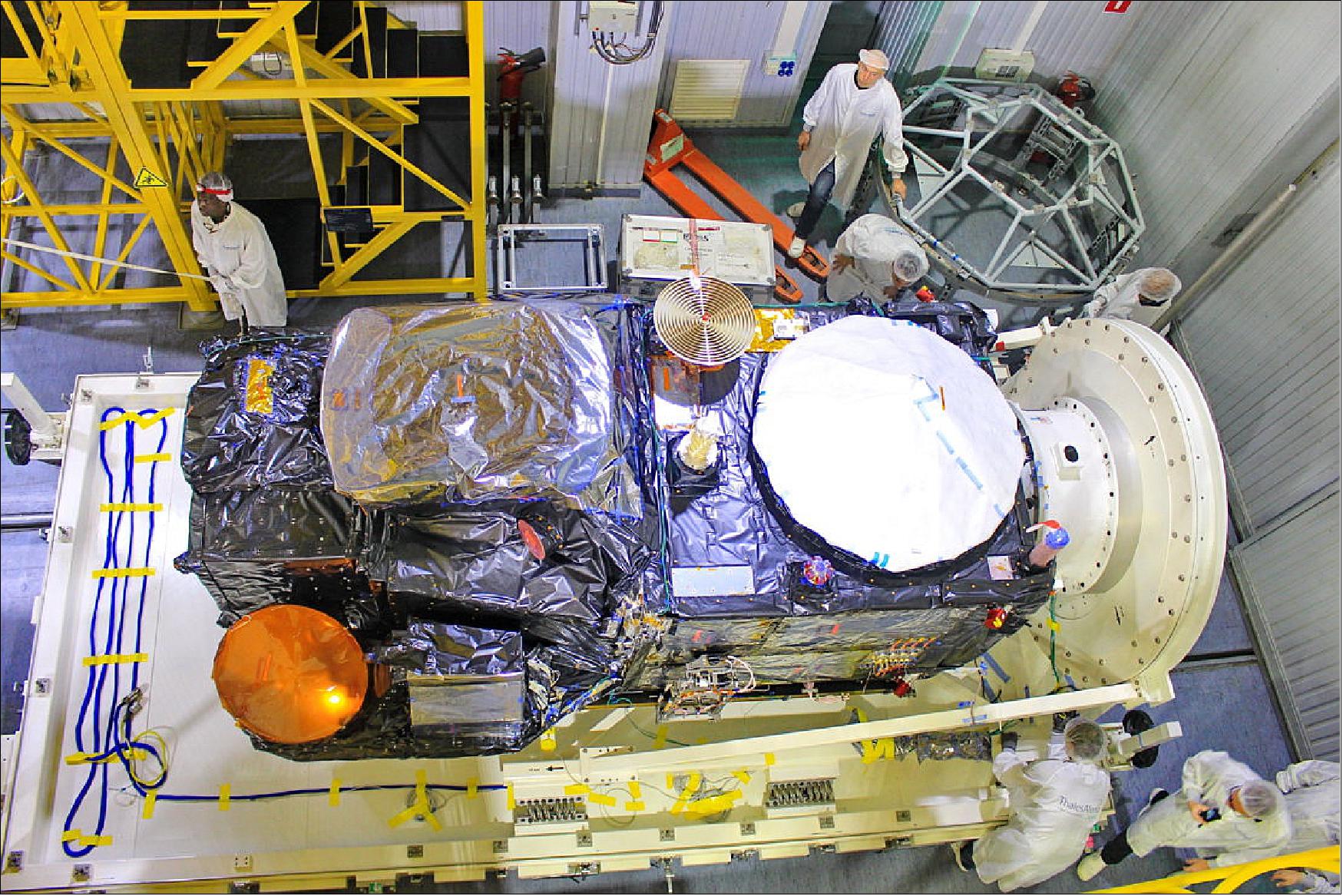
• Oct. 15, 2015: Before the latest satellite for Copernicus is packed up and shipped to the Plesetsk Cosmodrome in Russia for launch at the end of the year, the media and specialists were given the chance to see this next-generation mission center-stage in the cleanroom. The event was hosted by Thales Alenia Space in Cannes, France, where engineers have spent the last few years building and testing Sentinel-3A. 30)
• In December 2014, the Sentinel-3A spacecraft is now fully integrated, hosting a package of different instruments to monitor Earth’s oceans and land. After spending many months carefully piecing the satellite together, it is now being tested in preparation for launch towards the end of 2015. 31)
- Environmental tests will start in early 2015.
• In July 2014, the OLCI instrument was delivered and mounted onto the satellite.
Launch: The Sentinel-3A spacecraft was launched on February 16, 2016 (17.57 GMT) on a Rockot/Briz-KM vehicle of Eurockot Launch Services (a joint venture between Astrium, Bremen and the Khrunichev Space Center, Moscow). The launch site was the Plesetsk Cosmodrome in northern Russia. The satellite separated 79 minutes into the flight. 32) 33)
ESA awarded the contract to Eurockot Launch Services on Feb. 9, 2012. 34)
There are three spacecraft in this series: Sentinel-3A, -3B, and -3C. The second satellite is expected to be launched ~18 months after the first one.
Orbit: Frozen sun-synchronous orbit (14 +7/27 rev./day), mean altitude = 815 km, inclination = 98.6º, LTDN (Local Time on Descending Node) is at 10:00 hours. The revisit time is 27 days providing a global coverage of topography data at mesoscale.
With 1 satellite, the ground inter-track spacing at the equator is 2810 km after 1 day, 750 km after four days, and 104 km after 27 days.
For the altimetry mission, simulations show that this orbit provides an optimal compromise between spatial and temporal sampling for capturing mesoscale ocean structures, offering an improvement on SSH mapping error of up to 44% over Jason - due to improved spatial sampling (Figure )- and 8% over the Envisat 35-day orbit - due to better temporal sampling. After a complete cycle, the track spacing at the equator is approximately 100 km.
The Sentinel-3 mission poses the most demanding POD (Precise Orbit Determination) requirements, specially in the radial component, not only in post-processing on-ground, but also in real-time. This level of accuracy requires dual-frequency receivers. The main objective of the mission is the observation with a radar altimeter of sea surface topography and sea ice measurements (see columns 3, 4, 5 in Table 2).
Targets | Real-time | < 3 hours | < 1-3 days | < 1 month |
Radial orbit error (rms) | < 3 m | < 8 cm | < 3 cm | < 2 cm |
Application | Support tracking mode changes | Atmospheric dynamics | Ocean | Global change |
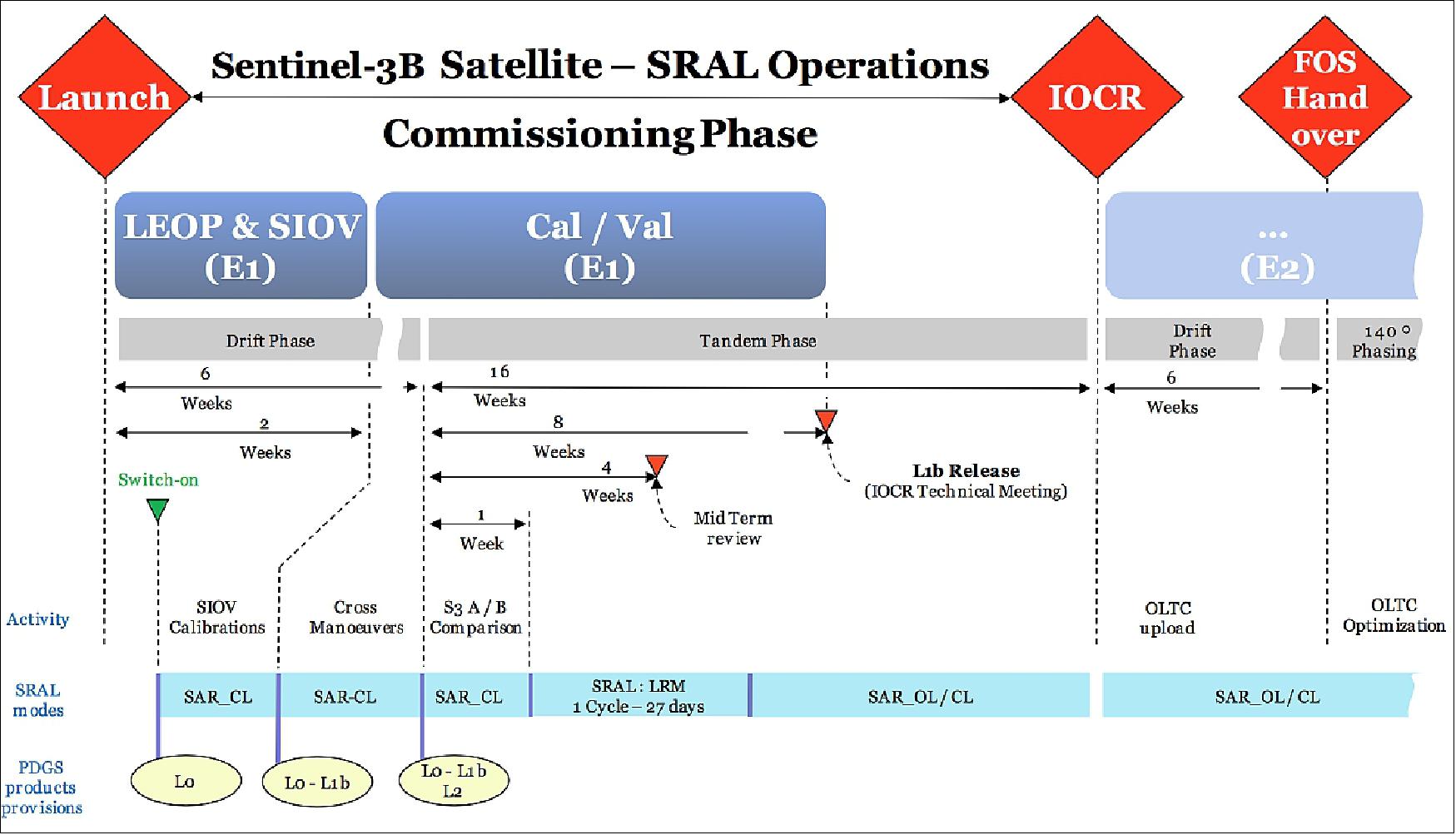
Launch: The Sentinel-3B satellite of ESA and the EC was launched on 25 April 2018 (17:57 GMT) on a Rockot/Briz KM vehicle of Eurockot from the Plesetsk Cosmodrome, Russia. 36) 37)
The second satellite will be placed in the same orbit with an offset of 140º; this phasing improves interleave between S-3A and S-3B for better SRAL meso-scale sampling of 4-7 days. 38)
Commissioning will include a 4-5 month tandem flight. A tandem phase operation of the A/B pair with ~30 s separation in time between satellites on near identical ground-track for ~4-5 months will be flown during Phase E1.
With two satellites flying simultaneously, the following coverage will be achieved (Ref. 11):
- Global Ocean color data is recorded with OLCI and SLSTR in less than 1.9 days at the equator, and in less than 1.4 days at latitudes higher than 30º, ignoring cloud effects.
- Global Land color data is recorded with OLCI and SLSTR in less than 1.1 days at the equator, and less than 0.9 days in latitudes higher than 30º.
- Global Surface temperature data is recorded in less than 0.9 days at the equator and in less than 0.8 days in latitudes higher than 30º.
- Continuous altimetry observations where global coverage is achieved after completion of the reference ground track of 27 days.
Note: As of May 2020, the previously single large Sentinel-3 file has been split into three files, to make the file handling manageable for all parties concerned, in particular for the user community.
• This article covers the Sentinel-3 mission and its imagery in the period 2020
• Sentinel-3 mission and its imagery in the period 2019
• Sentinel-3 imagery in the period 2018-2016
Status of the Sentinel-3 Mission in 2022 - 2021
• July 20, 2022: With searing temperatures and a string of record highs being smashed across western Europe, the current heatwave is all too apparent. Extreme heat warnings have been issued in several countries including France, Spain and Portugal, and deadly wildfires have forced thousands to flee their homes. The satellite images here are an example of how the crisis is being viewed by satellites orbiting Earth. 39)
- As the image of Figure 12 clearly shows, in some places the surface of the land reached a whopping 55°C. Considering Copernicus Sentinel-3 acquired these data in the morning, the temperature would have increased through the afternoon.
- Scientists monitor land-surface temperature because the warmth rising from Earth’s surface influences weather and climate patterns. These measurements are also particularly important for farmers evaluating how much water their crops need and for urban planners looking to improve heat mitigating strategies, for example.
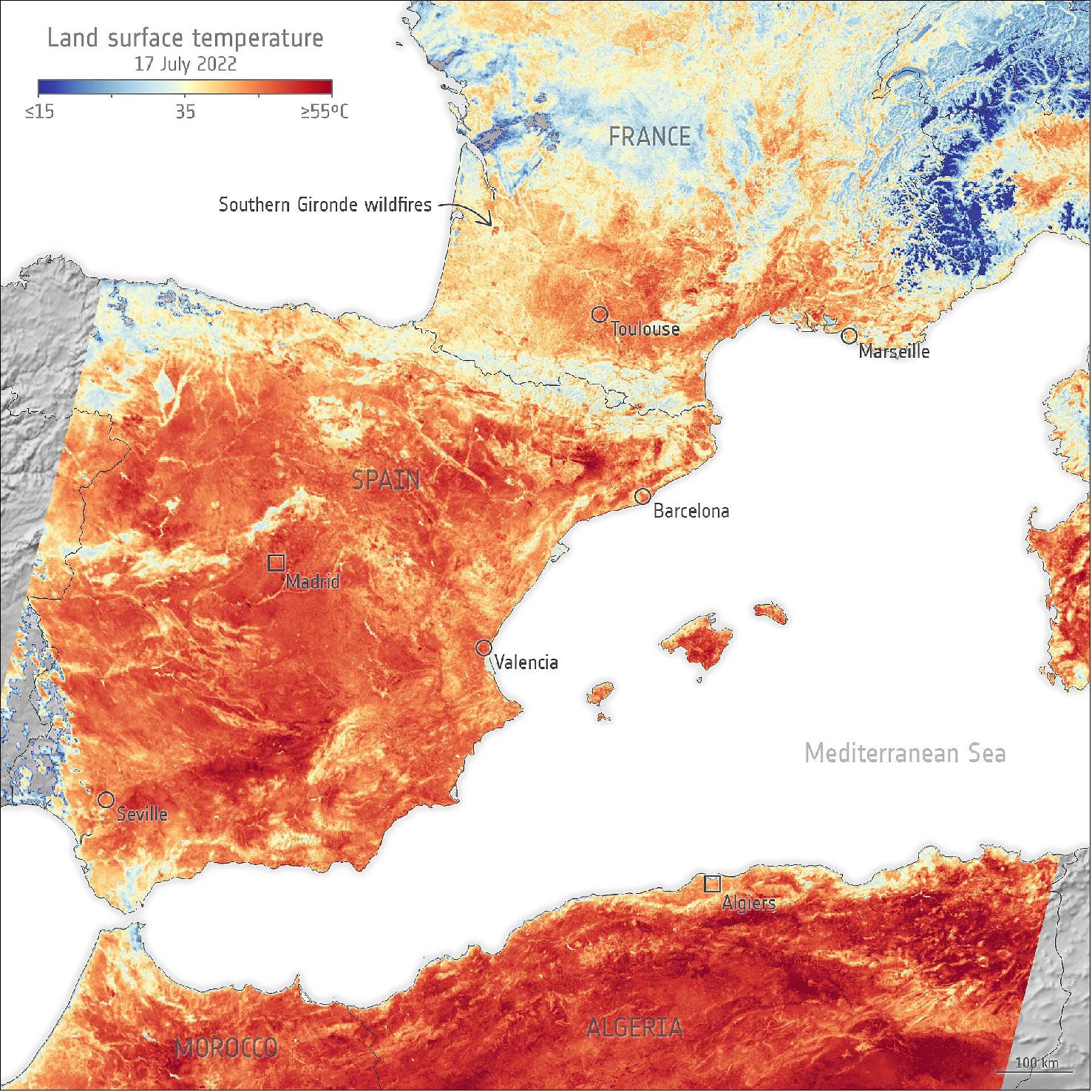
- The Copernicus Emergency Management Service has been activated to respond to many of the fires that are plaguing Europe at the moment, including those impacting Gironde.
- The service takes advantage of observations from several satellites to provide on-demand mapping to help civil protection authorities and the international humanitarian community in the face of major emergencies.
- Temperatures, whether they be air temperature or land-surface temperature, have risen so high over the last six weeks or so that numerous records have been broken.
- While heat warnings are still in force, drought warnings are also in place across almost half of the European Union bloc. This brings even more prolonged risk to water supplies and agricultural food production.
- As the effects of climate change increase, the fear is that these kind of weather extremes will increase also.
- Satellites orbiting the planet play an important role in delivering data to understand and monitor how our world is changing – data that are key for mitigation strategies and policymaking.
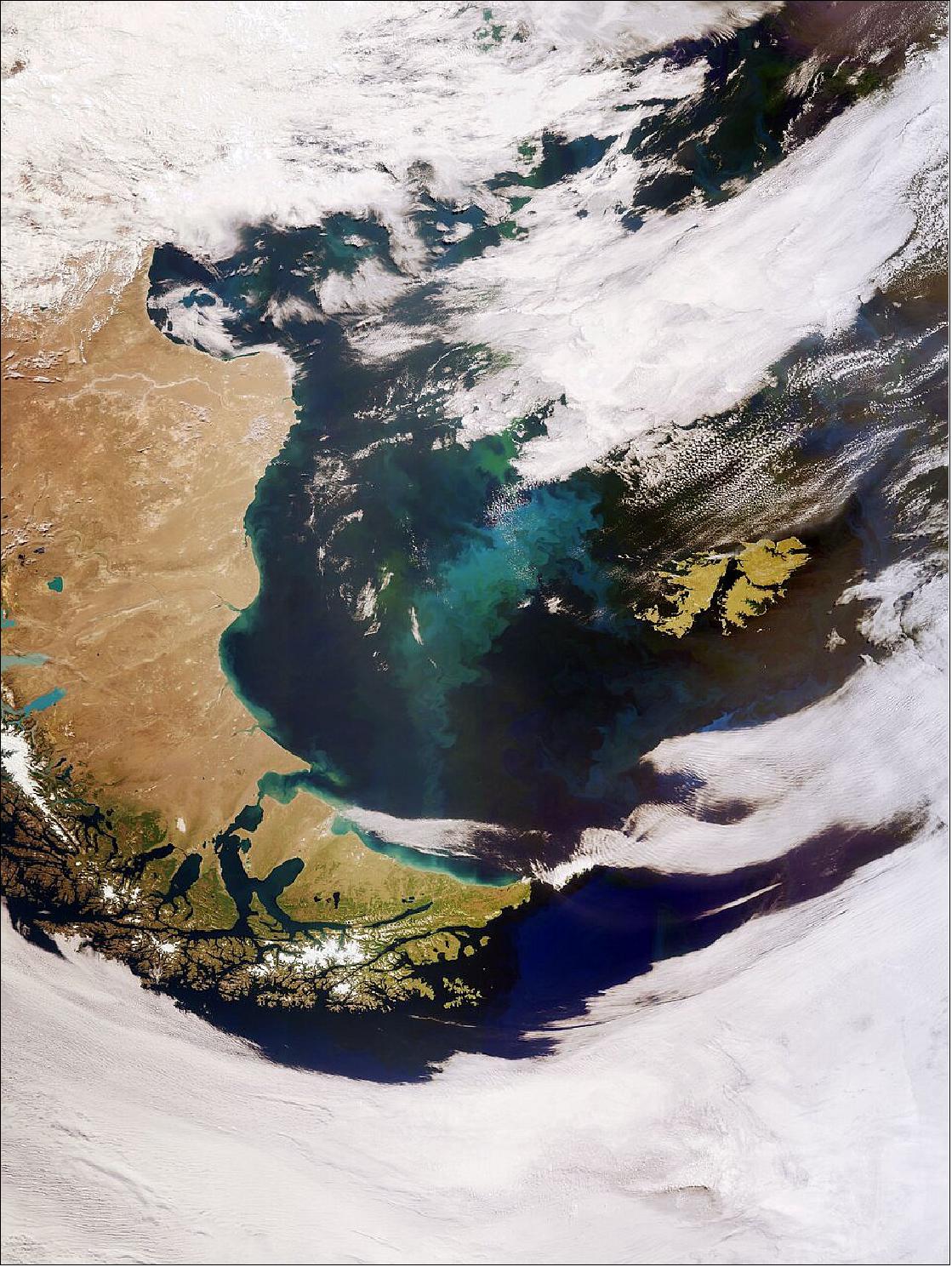
• July 01, 2022: The Copernicus Sentinel-3 mission captured this impressive, wide-angled view of Patagonia at the southern end of South America, as well as the Falkland Islands (Malvinas). 40)
- Covering an area of around 673,000 km2, Patagonia is split by Argentina and Chile. The region comprises the southern section of the Andes Mountains, with lakes, fjords, rainforests and glaciers in the west and deserts and tablelands to the east.
- The island archipelago of Tierra del Fuego, located at the southern tip of Patagonia (the southernmost tip of the image), is shared by Argentina and Chile, with the eastern part of the main island belonging to Argentina and the southern point of the archipelago, which forms Cape Horn, belonging to Chile. The Strait of Magellan, named after the discoverer, lies between Tierra del Fuego and mainland Argentina.
- Part of the Alberto de Agostini National Park can be seen in the bottom of the image. The park features a highly irregular coastline, which is deeply indented by fjords. Deemed a designated UNESCO Biosphere Reserve, the park has several tidewater glaciers and comprises the Gordon, Cook and Londonderry islands.
- The Falkland Islands can be seen in the far-right of the image. The islands lie in the South Atlantic Ocean, around 600 km east of Patagonia. The Falklands comprise two main islands, West Falkland and East Falkland, which are separated by the Falkland Sound – a channel that averages around 20 km in width.
- The swirling green and blue coloured areas are densely concentrated phytoplankton blooms. These microscopic organisms thrive in the cool, nutrient-rich waters between the coast of southern Argentina and the Falkland Islands. Nutrients carried by rivers promote phytoplankton growth, which may explain the plankton hugging the South American coastline in the image, as well as dust carried from Patagonia offshore which is then diffused on the ocean surface by strong westerly winds.
- In spring and summer, populations of algae in the South Atlantic often explode into enormous blooms – which float with the meandering ocean currents.
- Carrying a suite of cutting-edge instruments, Copernicus Sentinel-3 measures systematically Earth’s oceans, land, ice and atmosphere to monitor and understand large-scale global dynamics.
- Sentinel-3 measures the temperature, colour and height of the sea surface as well as the thickness of sea ice, while over land maps land, provides indices of vegetation state and measures the height of rivers and lakes.
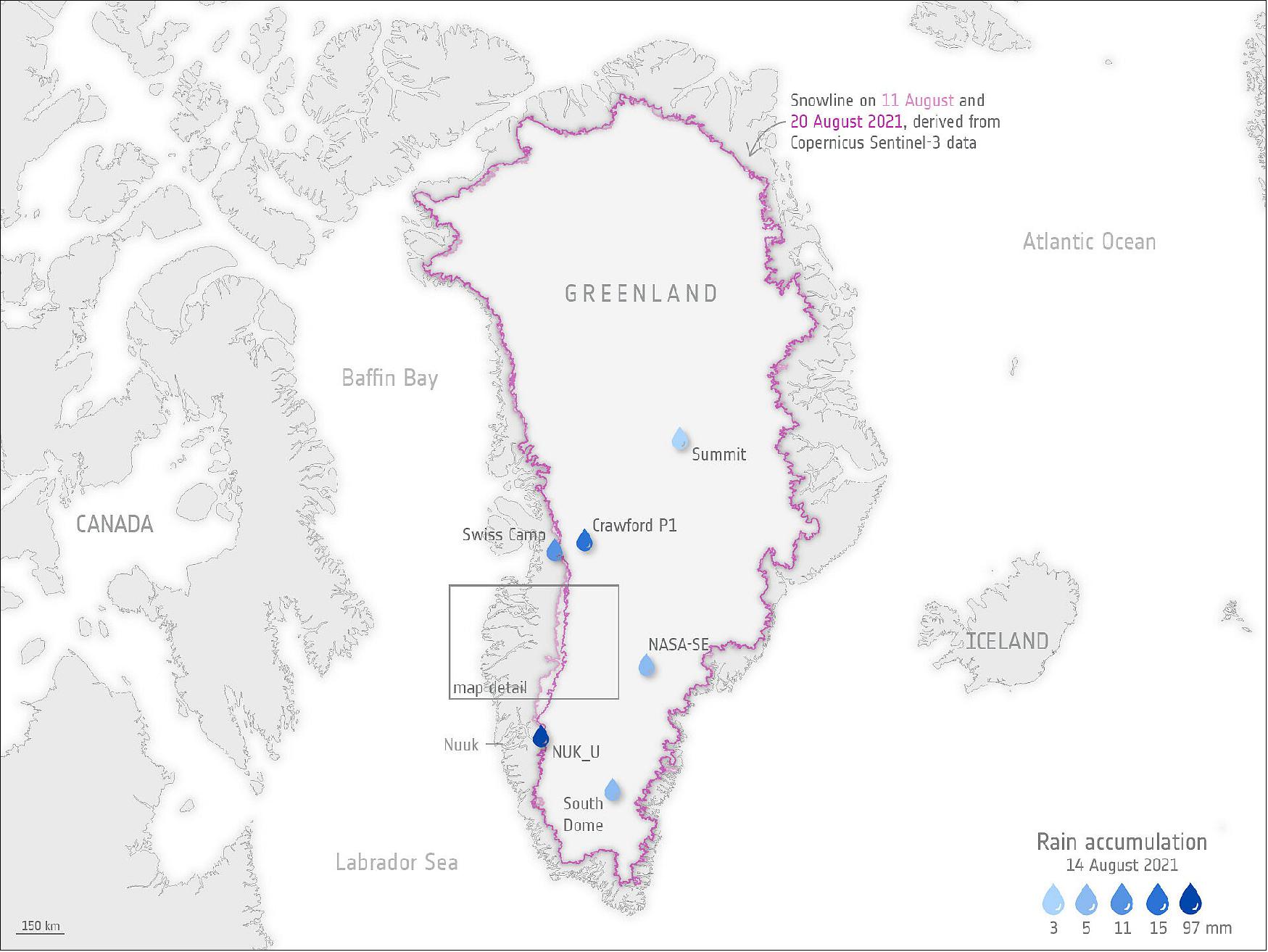
• May 25, 2022: For the first time ever recorded, in the late summer of 2021, rain fell on the high central region of the Greenland ice sheet. This extraordinary event was followed by the surface snow and ice melting rapidly. Researchers now understand exactly what went on in those fateful summer days and what we can learn from it. 41)
- The never-before-seen rainfall, on 14 August 2021, made headlines around the world. The upper-most parts of Greenland’s enormous ice cap used to be too cold for anything other than snow to fall, but not anymore.
- What caused this extreme rainfall and how did it affect the ice?
- Researchers from the Department of Glaciology and Climate at the Geological Survey of Denmark and Greenland (GEUS) in collaboration with colleagues from France and Switzerland have scrutinised these questions and come up with the answers.
- It didn’t only rain at Summit Camp – rain was measured by new automatic weather stations placed across the ice sheet by GEUS’ ice-sheet monitoring projects PROMICE and GC-Net.
- Studying detailed data from these stations alongside measurements of surface reflectivity, or albedo, from the Copernicus Sentinel-3 satellite mission and information on atmospheric circulation patterns, the researchers discovered that the rain had been preceded by a heatwave at a time of year when seasonal melting is usually slowing down.
![Figure 16: Greenland air temperature for August 2019, 2020, 2021, compared to the 1991–2020 August average. In the summer of 2021, unusually warm atmospheric rivers swept along Greenland, bringing potent melt conditions when the melt season would normally be drawing to a close. The image shows the air temperature over Greenland in the Augusts of 2019, 2020, 2021, compared to the 1991–2020 August average. Although this heatwave was followed by never-before-seen rainfall, it was the heat that led to a major melt, completely removing the surface snow, thereby changing the surface albedo so that Greenland snow and ice absorbed more of the Sun’s rays, further exacerbating the melt [image credit: Copernicus Climate Change Service/ECMWF/ESA (data ERA5)]](https://www.eoportal.org/ftp/satellite-missions/c/S3-2022_200722/S3-2022_Auto5B.jpeg)
It wasn’t the rain
- “It turns out that the rain itself wasn’t the most important factor”, says Prof. Jason Box from GEUS and lead author of the paper reporting their results, which has been accepted for publication in Geophysical Research Letters.
- “There is an irony. It's not really the rain that did the damage to the snow and ice, it's the darkening effect of the meltwater and how the heat from the event erased snow that had overlaid darker ice across the lower third of the ice sheet.
- “Unusually warm atmospheric rivers swept along Greenland in the late summer months, bringing potent melt conditions when the melt season was drawing to a close.”
- In fact, this sudden increase of surface ice melt on Greenland could have happened without any rain ever touching the ground.
- The main culprit was the heat itself, melting and completely removing the surface snow, thereby changing the surface albedo, Greek for ‘whiteness’, so that Greenland snow and ice absorbed more of the Sun’s rays.
- The researchers found that, between 19 and 20 August 2021, this melt caused the altitude of the ice sheet’s snowline near Kangerlussuaq to retreat in elevation by a whopping 788 metres, the snowline retreated, exposing a wide area of dark bare ice.
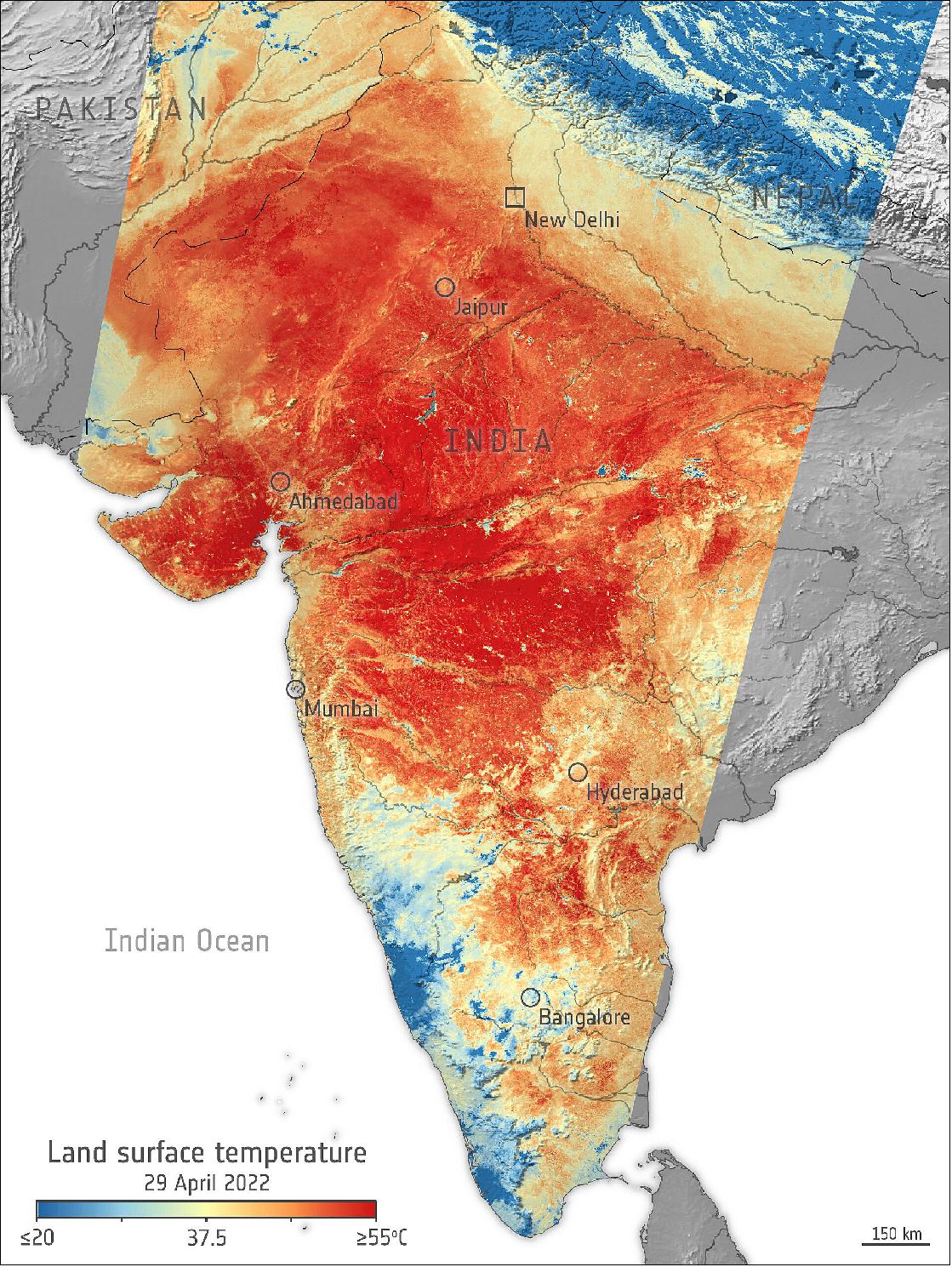
• April 29, 2022: India is currently facing a prolonged heatwave, with temperatures exceeding 42°C in numerous cities across the country. This comes just weeks after India recorded its hottest March since the country’s meteorological department began its records over 120 years ago. This image, produced using data from the Copernicus Sentinel-3 mission, shows the land surface temperature across most of the nation. 42)
- According to the India Meteorological Department, maximum air temperatures reached 43-46°C over most parts of Rajasthan, Vidarbha, Madhya Pradesh and East Uttar Pradesh; in many parts over Gujarat, interior Odisha; and in some parts of Madhya Maharashtra on 28 April. Forecasters warned that heatwave conditions are expected to continue until 2 May.
- Experts at the Indian Institute of Technology’s Water and Climate Lab stated that, in recent years, the number of Indian states hit by heatwaves has increased, as extreme temperatures become more frequent.
- Owing to the absence of cloud cover on 29 April (10:30 local time), the Sentinel-3 mission was able to obtain an accurate measurement of the land surface temperature of the ground, which exceeded 60°C in several areas. The data shows that surface temperature in Jaipur and Ahmedabad reached 47°C, while the hottest temperatures recorded are southeast and southwest of Ahmedabad (visible in deep red) with maximum land surface temperatures of around 65°C.
- Sentinel-3 can monitor wildfires, map the way the land is used, provide indices of vegetation state, as well as measure the temperature, colour and height of the sea surface.
• April 15, 2022: The Scandinavian Peninsula, which comprises Sweden and Norway, is approximately 1850 km long. It extends southward from the Barents Sea in the north, the Norwegian sea to the west and the Gulf of Bothnia and the Baltic Sea to the east. Denmark, Finland, Latvia and Lithuania are also visible in this week’s image. 43)
- Along the left side of the peninsula, the jagged fjords lining Norway’s coast can be spotted from space. Many of these fjords were carved out by the thick glaciers that formed during the last ice age. The largest and deepest fjord on Norway’s coast, called Sognefjord, lies in southwest Norway and is 1308 m deep.
- Sweden’s topography consists mainly of flat, rolling lowlands dotted with lakes. Lake Vänern and Lake Vättern, the largest lakes of Sweden, are clearly visible at the bottom of the peninsula. The lakes do not freeze completely during the winter months. To the northeast of the peninsula lies Finland with more than 55,000 lakes – most of which were also created by glacial deposits.
- During March, much of northern Europe and Scandinavia had been affected by a strong high-pressure weather system, which also allowed for this almost cloud-free acquisition. On 19 March in Tirstrup, Denmark, the atmospheric pressure reached 1051.6 hPa, the highest value ever recorded in March.
- Carrying a suite of cutting-edge instruments, Copernicus Sentinel-3 measures Earth’s oceans, land, ice and atmosphere to monitor and understand large-scale global dynamics. It provides essential information in near-real time for ocean and weather forecasting.
- With a focus towards our oceans, Sentinel-3 measures the temperature, colour and height of the sea surface as well as the thickness of sea ice, while, over land, the mission maps the way land is used, provides indices of vegetation state and measures the height of rivers and lakes.

• January 20, 2022: In July 2017, a giant iceberg, named A-68, snapped off Antarctica’s Larsen-C ice shelf and began an epic journey across the Southern Ocean. Three and a half years later, the main part of iceberg, A-68A, drifted worryingly close to South Georgia. Concerns were that the berg would run aground in the shallow waters offshore. This would not only cause damage to the seafloor ecosystem but also make it difficult for island wildlife, such as penguins, to make their way to the sea to feed. Using measurements from satellites, scientists have charted how A-68A shrunk towards the end of its voyage, which fortunately prevented it from getting stuck. However, the downside is that it released a colossal 152 billion tonnes of freshwater close to the island, potentially having a profound effect on the island’s marine life. 44)
- When A-68 was spawned, it had a surface area of more than twice the size of Luxemburg – one of the largest icebergs on record.
- It lost a chunk of ice almost immediately after being calved, resulting in the larger berg being renamed A-68A, and its offspring became A-68B. In April 2020, A-68A lost another chunk subsequently called A-68C.
- Antarctic icebergs are named from the Antarctic quadrant in which they were originally sighted, then a sequential number, and then if the iceberg breaks, a sequential letter is added.
- For the first two years of its life, A-68A stayed in the cold waters of the Weddell Sea close to its parent ice shelf. Here, it experienced little in the way of melting. However, once the berg began its northward journey across the Drake Passage, it travelled through increasingly warm waters and began to melt.
- Altogether, the A-68A iceberg thinned by 67 metres from its initial thickness of 235 metres, with the rate of melting rising sharply as the berg drifted in the Scotia Sea around South Georgia.
- A paper published in Remote Sensing of Environment describes how researchers from the Centre for Polar Observation and Modelling in the UK and the British Antarctic Survey combined measurements from different satellites to chart how A-68A changed in area and thickness throughout its life cycle. 45)
- The journey of A-68A was charted using observations from five different satellite missions.
- To track how the area of A-68A changed, they used optical imagery from the Copernicus Sentinel-3 mission and from the MODIS instrument on the US Terra mission, along with radar data from the Copernicus Sentinel-1 mission. While the Sentinel-1 radar imagery offers all-weather capability and higher spatial resolution, MODIS and Sentinel-3 optical imagery have higher temporal resolution but cannot be used during the polar night and on cloudy days.
- To measure changes in the iceberg’s freeboard, or the height of the ice above the sea surface, they used data from ESA’s CryoSat mission and from the US ICESat-2 mission. Knowing the freeboard of the ice means that the thickness of the entire iceberg can be calculated.
- Tommaso Parrinello, ESA’s CryoSat Mission Manager, said, “Our ability to study every move of the iceberg in such detail is thanks to advances in satellite techniques and the use of a variety of measurements. Imaging satellites record the shape of the iceberg and data from altimetry missions like CryoSat add another important dimension as they measure the height of surfaces – which is essential for calculating changes in volume.”
- The new study reveals that A-68A collided only briefly with the sea floor and broke apart shortly afterwards, making it less of a risk in terms of blockage. By the time it reached the shallow waters around South Georgia, the iceberg’s keel had reduced to 141 metres below the ocean surface, shallow enough to just avoid the seabed which is around 150 metres deep.
- If an iceberg’s keel is too deep it can get stuck on the sea floor. This can be disruptive in many ways; the scour marks can destroy fauna, and the berg itself can block ocean currents and predator foraging routes.
- However, a side effect of the melting was the release of a colossal 152 billion (152 x 109) tonnes of freshwater close to the island – a disturbance that could have a profound impact on the island’s marine habitat.
- When icebergs detach from ice shelves, they drift with the ocean currents and wind, releasing cold fresh meltwater and nutrients as they melt. This process influences the local ocean circulation and fosters biological production around the iceberg.
- Anne Braakmann-Folgmann, PhD candidate at the CPOM (Centre for Polar Observation and Modelling) and lead author of the study said, “This is a huge amount of meltwater, and the next thing we want to learn is whether it had a positive or negative impact on the ecosystem around South Georgia.
- “Because A-68A took a common route across the Drake Passage, we hope to learn more about icebergs taking a similar trajectory, and how they influence the polar oceans.”
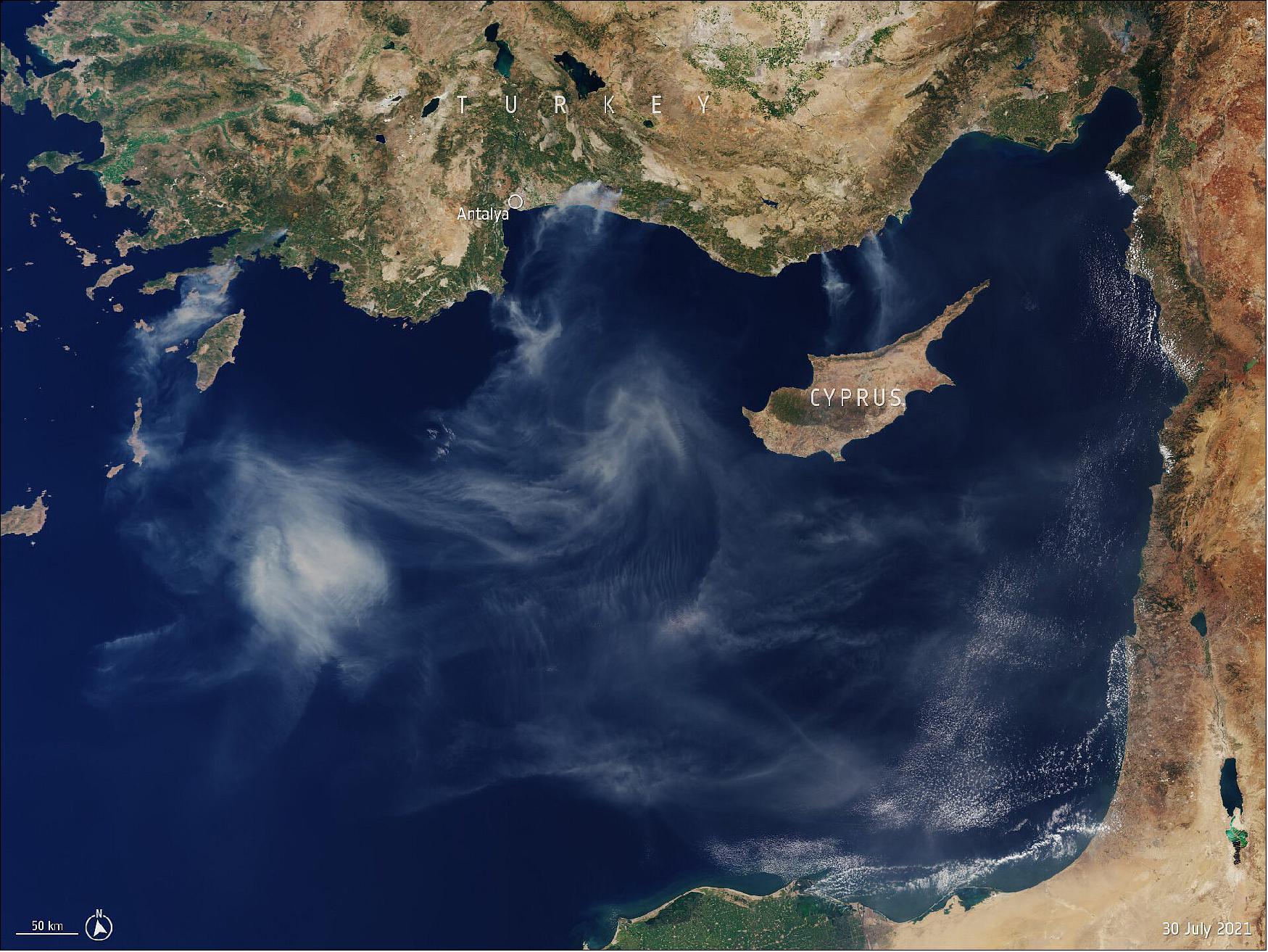
• August 3, 2021: This map shows the temperature of the land surface on 2 August 2021. It is clear to see that surface temperatures in Turkey and Cyprus have reached over 50°C, again. A map we published on 2 July shows pretty much the same situation. The Mediterranean has been suffering a heatwave for some weeks, leading to numerous wildfires. Turkey, for example, is reported to be amid the country’s worst blazes in at least a decade. 46)
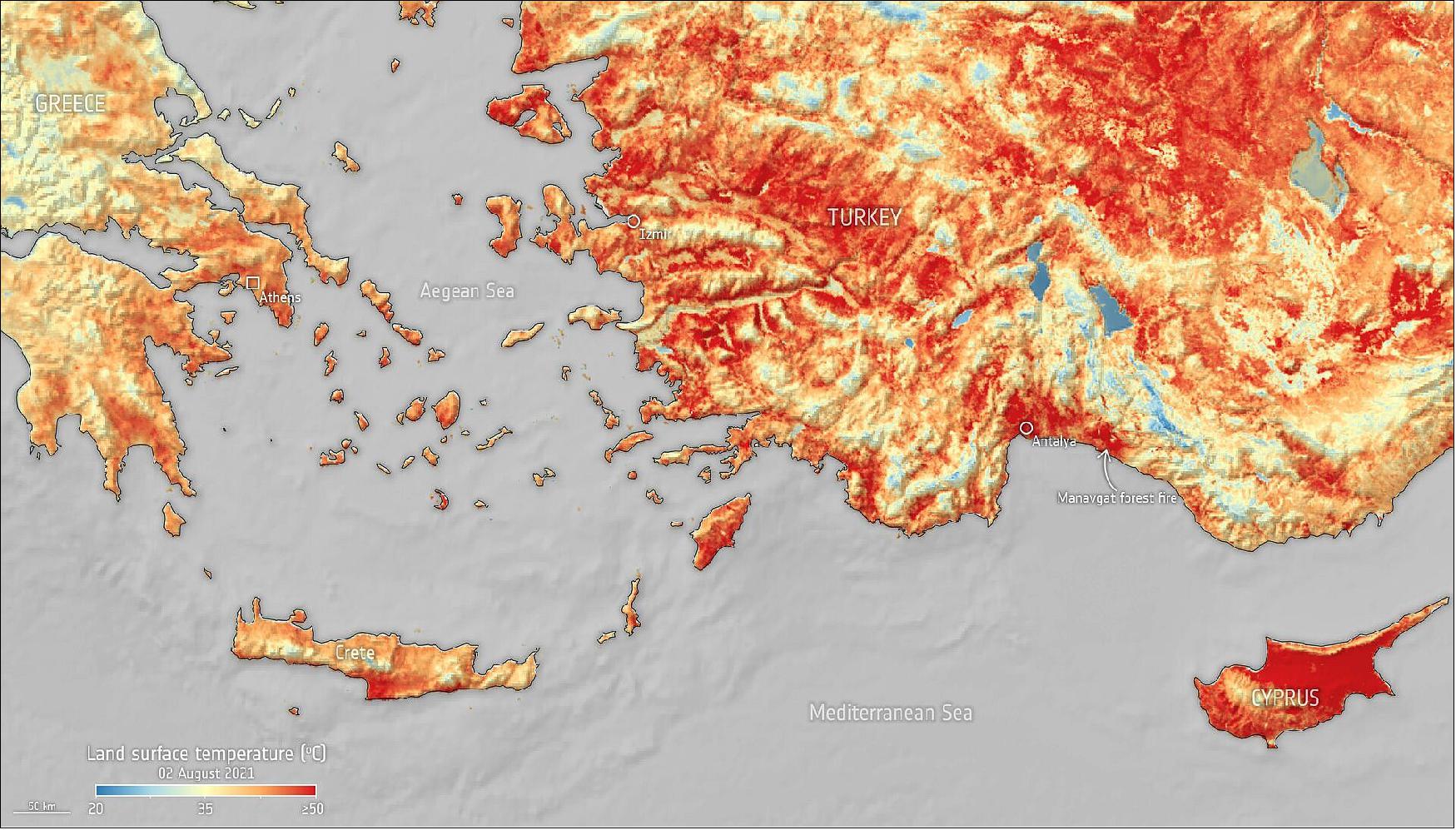
- The Copernicus Sentinel-3 satellites also carry camera-like instruments, which captured smoke billowing from the fires in Turkey on 30 July.
• August 2, 2021: Captured by the Copernicus Sentinel-3 mission on 30 July 2021, this image shows smoke billowing from several fires along the southern coast of Turkey. Turkey has been battling deadly wildfires since last week. 47)
- Southeast Europe is currently experiencing extremely high temperatures. Greece is reported to be expecting an all-time European record today of 47°C. The heatwave, the result of a heat dome, has seen temperatures reach above 40°C in many areas, and meteorologists expect the weather will continue this week, making it the most severe heatwave since the 1980s.
- Fires have also been raging in Spain, Italy and Greece, some of which have led to the Copernicus Emergency Mapping Service being triggered. The mapping service uses data from satellites to aid response to disasters such as wildfires and floods.
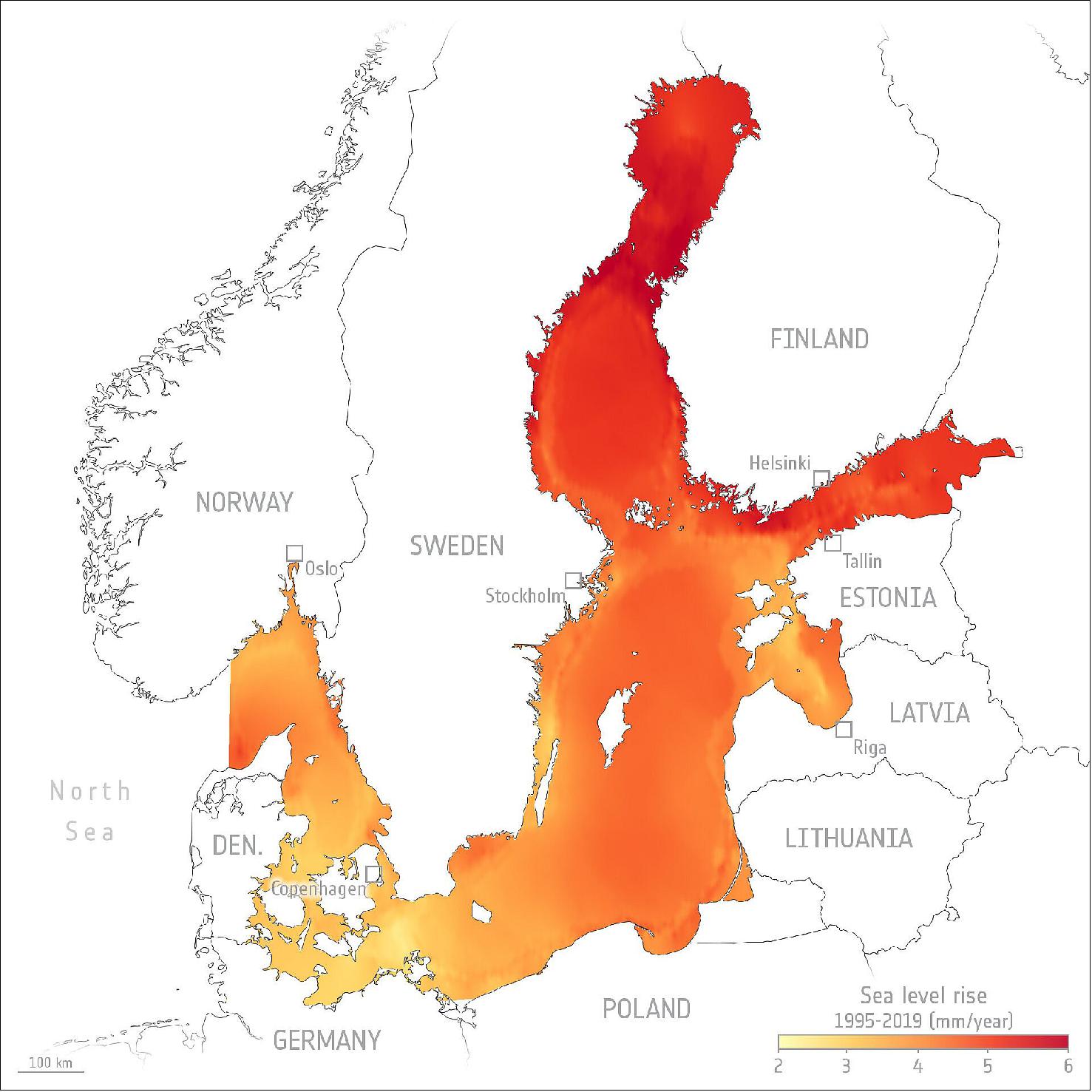
• July 7, 2021: For the hundreds of millions of people living in coastal regions around the world, rising seas driven by climate change pose a direct threat. In order for authorities to plan appropriate protection strategies, accurate information on sea-level rise close to the coast is imperative. For various reasons, these measurements are difficult to get from satellites. However, new ESA-funded research demonstrates how a specific way of processing satellite altimetry data now makes it possible to determine sea-level change in coastal areas with millimeter per year accuracy, and even if the sea is covered by ice. 48)
- Using the Baltic Sea as a target for the research, this new processing technique, which shows regional differences in sea-level rise, drastically improves and extends previous sea-level trend maps. The results reveal that between 1995 and 2019, sea level has risen at an annual rate of 2–3 mm in the south, along the German and Danish coasts, compared to 6 mm in the northeast, in the Bay of Bothnia.
- As our atmosphere and oceans continue to warm because of climate change, sea levels are likely to continue to rise for many decades to come. The 2019 report from the United Nations Intergovernmental Panel on Climate Change (IPCC) paints a grave picture of the problems we face because of sea-level rise. The Special Report on the Ocean and Cryosphere in a Changing Climate states that global mean sea level is likely to rise between 0.29 m and 1.1 m by the end of this century. This is the worst projection of sea-level rise ever made by the IPCC.

- However, as with any average, the term ‘global mean sea level rise’ does not tell the whole story. Sea level is not rising at the same rate everywhere. Along coasts, for example, sea level rise can exceed the global mean because of complex ocean dynamics nearer land.
- While the French–USA series of Jason satellite missions, ESA’s Envisat and CryoSat missions, and the Copernicus Sentinel-3 satellites have provided essential data to track sea-level rise in the open ocean, mapping rise nearer the coastline is more difficult. This is because mountains, bays and offshore islands distort the radar signal that is reflected back to the satellite. Another problem is sea ice, which covers parts of the oceans in winter, is impenetrable to radar.
- Florian Seitz, Director of the German Geodetic Research Institute at the Technical University of Munich (TUM), said, “To protect people and infrastructure – for example by building flood protection structures, securing ports or making dikes higher – we need reliable forecasts on sea-level trends.”
- Through ESA’s Earth Observation Science for Society Baltic Sea Level project (Baltic SEAL), a team of researchers at the Technical University of Munich worked with international partners to develop algorithms to process measurement data from a range of satellite altimetry sensors to yield precise and high-resolution measurements of sea-level changes in coastal areas and in leads between the sea ice.
- The researchers chose the Baltic Sea as the model region. “Data from this region are especially suitable for developing new methods because multiple factors make analysis difficult such as the complex shape of the coastline, sea ice and wind. At the same time, there are plenty of local sea level measurements to corroborate the results,” said project leader Marcello Passaro.
- “An analytical method that works in the Baltic Sea can be easily adapted to other regions.”
- To handle hundreds of millions of radar measurements taken between 1995 and 2019 from satellite missions including the Jason series, Envisat, CryoSat and Copernicus Sentinel-3, the team developed a multi-stage process. In the first step, they calibrated the measurements from the various satellite missions so that they could be combined. With specially developed algorithms, they were then able to detect signals from the ice-covered seawater in the radar reflections produced along cracks and fissures, called leads. This made it possible to determine sea levels for the winter months. With new computational methods they also achieved better resolution of radar echoes close to land.
- As a result, it is now possible to measure sea level in coastal areas and compare the results with local tidal records. The processed data were then fitted to a fine grid with a resolution of 6–7 km using an algorithm developed by the team. The result is a highly precise dataset covering the entire Baltic Sea region.
- The data show the regional effects of the rise in sea level between 1995 and 2019. Sea level has risen at an annual rate of 2–3 mm in the south, along the German and Danish coasts, compared to 6 mm in the northeast, in the Bay of Bothnia. The cause of this large rise is strong south-westerly winds that drive the waters to the north and eastward. This above-average increase in sea level does not pose a threat to coastal dwellers, however, because since the end of the last Ice Age the land here has been rising by up to 1 cm a year as a result of post-glacial rebound.
- The researchers have also created a comprehensive dataset for the North Sea region. The sea level here is rising by 2.6 mm per year, and by 3.2 mm in the German Bight. Local trends can be determined using the dataset and the user manual – both of which are freely accessible online.
- “With the data, researchers can verify their climate models, for example, and public authorities can plan suitable protective measures,” says Dr Seitz.
- ESA’s Jérôme Benveniste added, “The Baltic SEAL project has produced excellent results, demonstrating the value of Earth observation for society. This new way of processing satellite radar altimetry data is really going to help authorities to take appropriate measure to protect citizens and infrastructure from sea-level rise. We are also keenly awaiting the high-resolution data that will come from the new Copernicus Sentinel-6 mission, which also promises to map sea-surface height close to the coastline, which uses an additional new processing algorithm called Fully-Focused Synthetic Aperture Radar to drastically increase the retrieved resolution.”
- The Baltic SEAL dataset is available at balticseal.eu
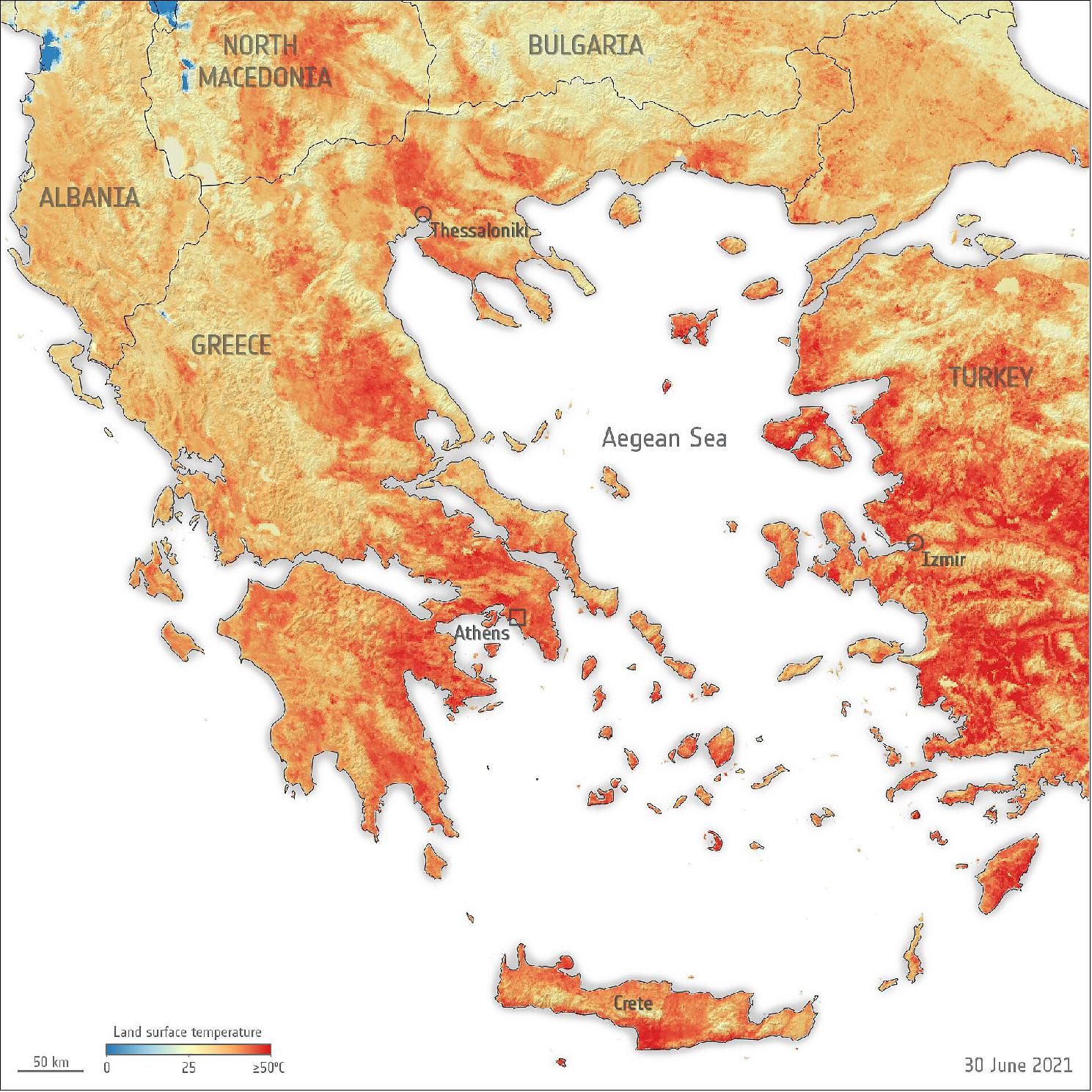
• July 2, 2021: Scorching temperatures hit both Greece and Turkey this week, leading to the temporary closure of the Acropolis – Greece’s most visited monument. 49)
- This map shows the land surface temperature of Greece and surrounding countries on 30 June. The data show that surface temperatures reached over 50°C in many locations including the northwest of Athens and many regions in Turkey. The blue spots visible near Albania are clouds.
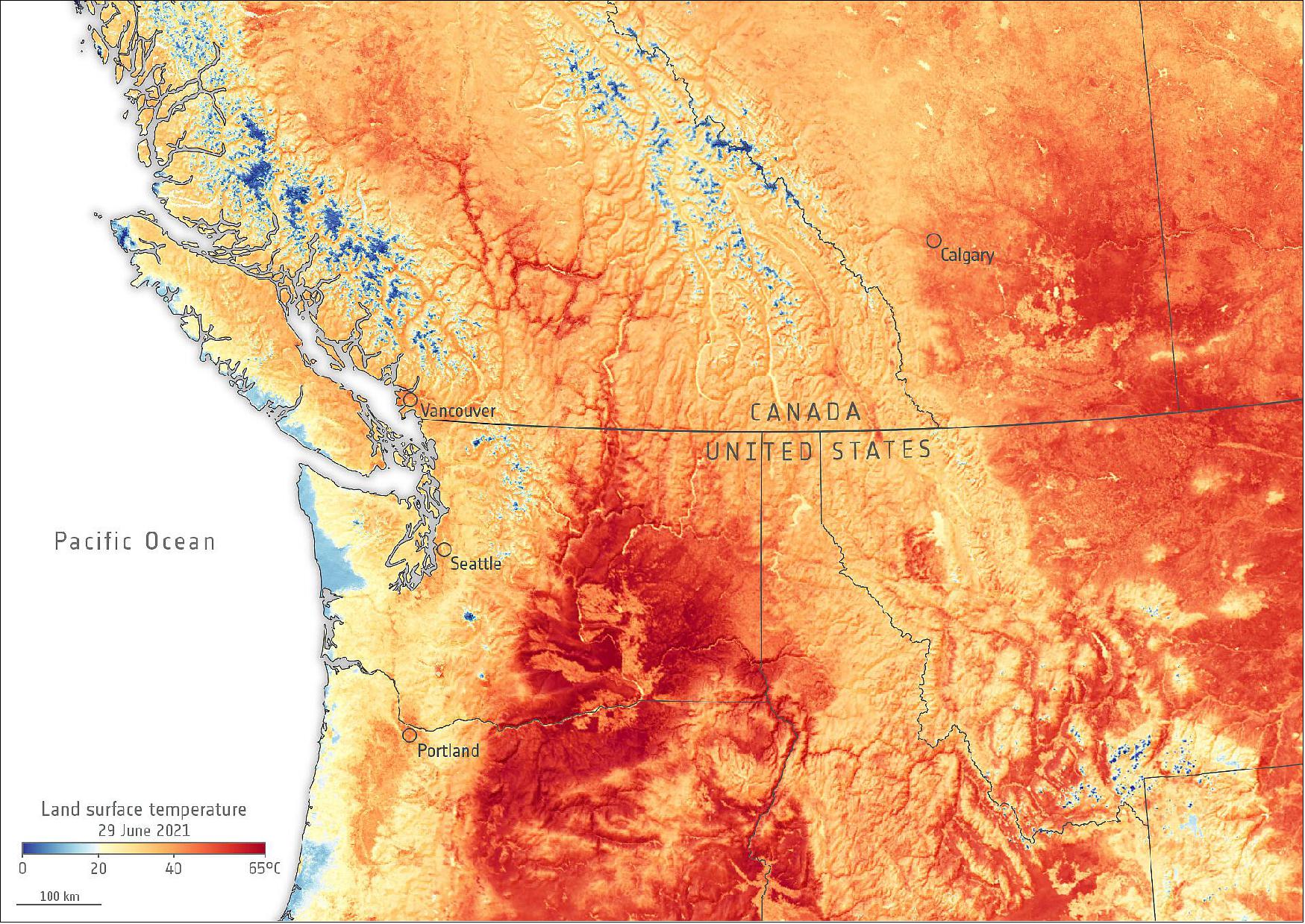
• July 1, 2021: While heatwaves are quite common during the summer months, the scorching heatwave hitting parts of western Canada and the US has been particularly devastating – with temperature records shattered and hundreds of people falling victim to the extreme heat. 50)
- Canada broke its temperature record for a third consecutive day: recording a whopping 49.6°C on 29 June in Lytton, a village northeast of Vancouver, in British Columbia.
- Portland, Oregon, also broke its all-time temperature record for three days in a row.
- The extent of the heatwave can be seen in the map of Figure 29, which shows the land surface temperature of parts of Canada and the US on 29 June. The data show that surface temperatures in Vancouver and Portland reached 43°C, and Calgary recorded 45°C. The hottest temperatures recorded are in the state of Washington (visible in deep red) with maximum land surface temperatures of around 69°C.
- The persistent heat over parts of western Canada and parts of the US has been caused by a heat dome stretching from California to the Arctic. Temperatures have been easing in coastal areas, but there has been little respite for the inland regions.
• May 28, 2021: All five of North America’s Great Lakes are pictured in this spectacular image captured by the Copernicus Sentinel-3 mission: Lake Superior, Michigan, Huron, Erie, and Ontario. 51)
- The Great Lakes are a chain of deep freshwater lakes. With a combined area of around 244,000 km2, the lakes represent the largest surface of freshwater in the world – covering an area exceeding that of the United Kingdom.
- Around 100,000 years ago, a major ice sheet formed over most of Canada and part of the US. As it formed, giant glaciers flowed into the land carving out valleys and levelling mountains. As higher temperatures began to melt the ice sheet, meltwater filled the holes left by the glaciers.
- Many of these holes today still contain water and formed the thousands of lakes across central USA and Canada. The biggest remnants of this process are the Great Lakes. The lakes drain roughly from west to east and empty into the Atlantic Ocean.
- Lake Superior, the northernmost and westernmost lake, is the largest and deepest of the Great Lakes. It drains into Lake Huron via the St. Marys River at an average rate of 2000 m3/s. Lake Michigan lies south of Lake Superior and connects with Lake Huron through the six km-wide channel Straits of Mackinac in the north. Lake Huron is the second largest of the Great Lakes and is bounded by Michigan, US, on the north and by Ontario, Canada, to the east.
- Lake Erie is the shallowest and southernmost of the Great Lakes. Green algal blooms are visible on the lake. These toxic blooms have been a problem for the lake in recent years. Caused by heightened levels of phosphorus – found in fertilizers and common household products – finding its way into the water, these blooms have caused harm to the lake’s fish population.

- Parts of the Great Lakes typically freeze every winter. As Earth’s climate changes, rising air and water temperatures have led to less ice cover on many lakes in North America, including the Great Lakes.
![Figure 31: Ice cover on the Great Lakes can fluctuate dramatically from year to year, depending on several patterns of climate variability. Years with lower-than-normal ice cover appear to have become more frequent during the past two decades. The graph indicates that 1979 was the year with the highest ice coverage (94.7%), while 2002 had the lowest maximum ice coverage (11.8%) meaning that the Great Lakes were almost ice-free for the entire year [image credit: ESA (Data source: NOAA GLERL)]](https://www.eoportal.org/ftp/satellite-missions/c/S3-2022_200722/S3-2022_Auto4E.jpeg)
- Sentinel-3 is a two-satellite mission to supply the coverage and data delivery needed for Europe’s Copernicus environmental monitoring program. Each satellite’s instrument package includes an optical sensor to monitor changes in the color of Earth’s surfaces. It can be used, for example, to monitor ocean biology and water quality.
• April 21, 2021: Oceans play a vital role in taking the heat out of climate change, but at a cost. New research supported by ESA and using different satellite measurements of various aspects of seawater along with measurements from ships has revealed how our ocean waters have become more acidic over the last three decades – and this is having a detrimental effect on marine life. 52)
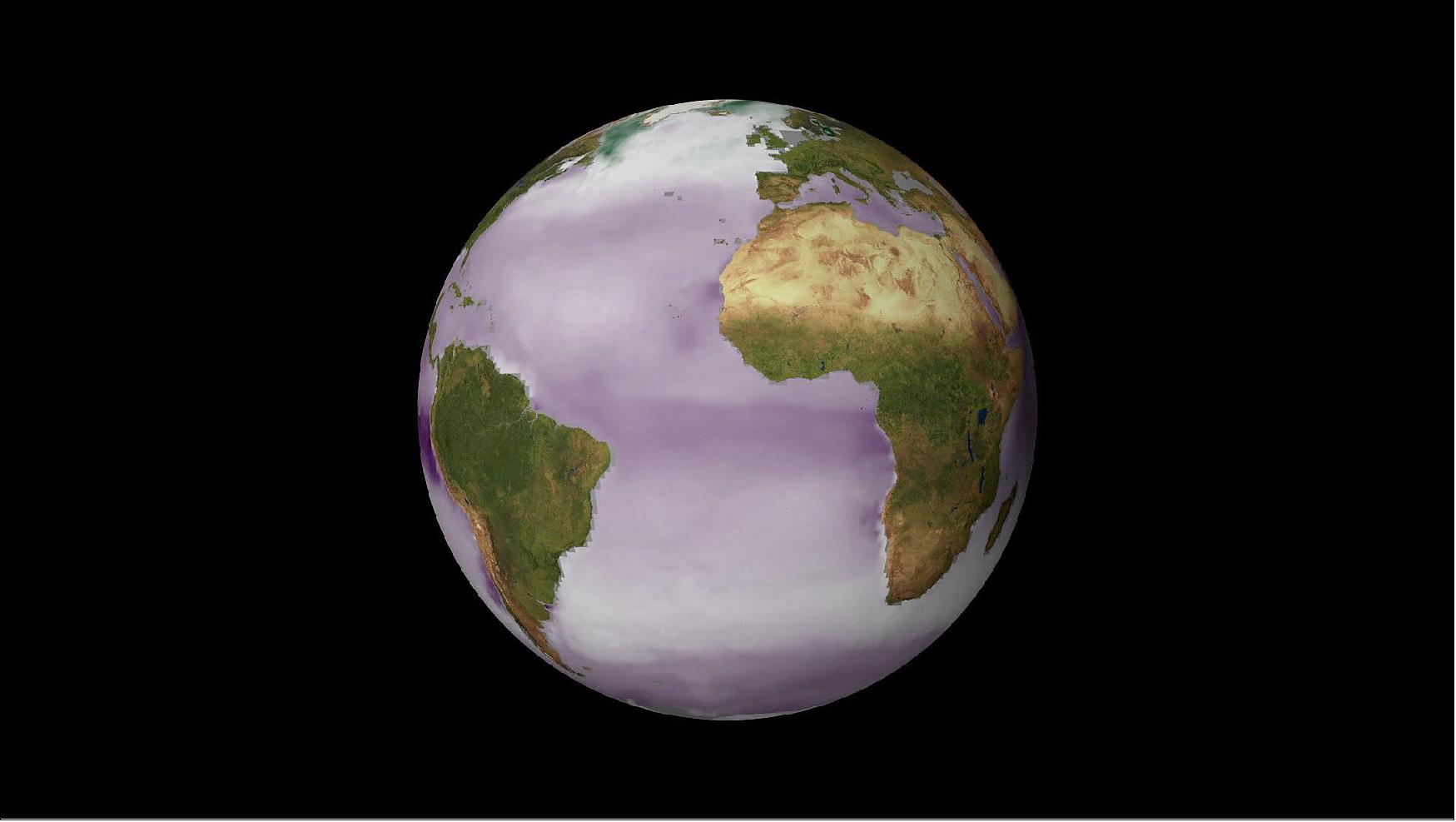
- Oceans not only soak up around 90% of the extra heat in the atmosphere caused by greenhouse gas emissions from human activity such as the burning of fossil fuel, but also draw down about 30% of the carbon dioxide we pump into the atmosphere. While this sounds like a good thing, these processes are making seawater more acidic.
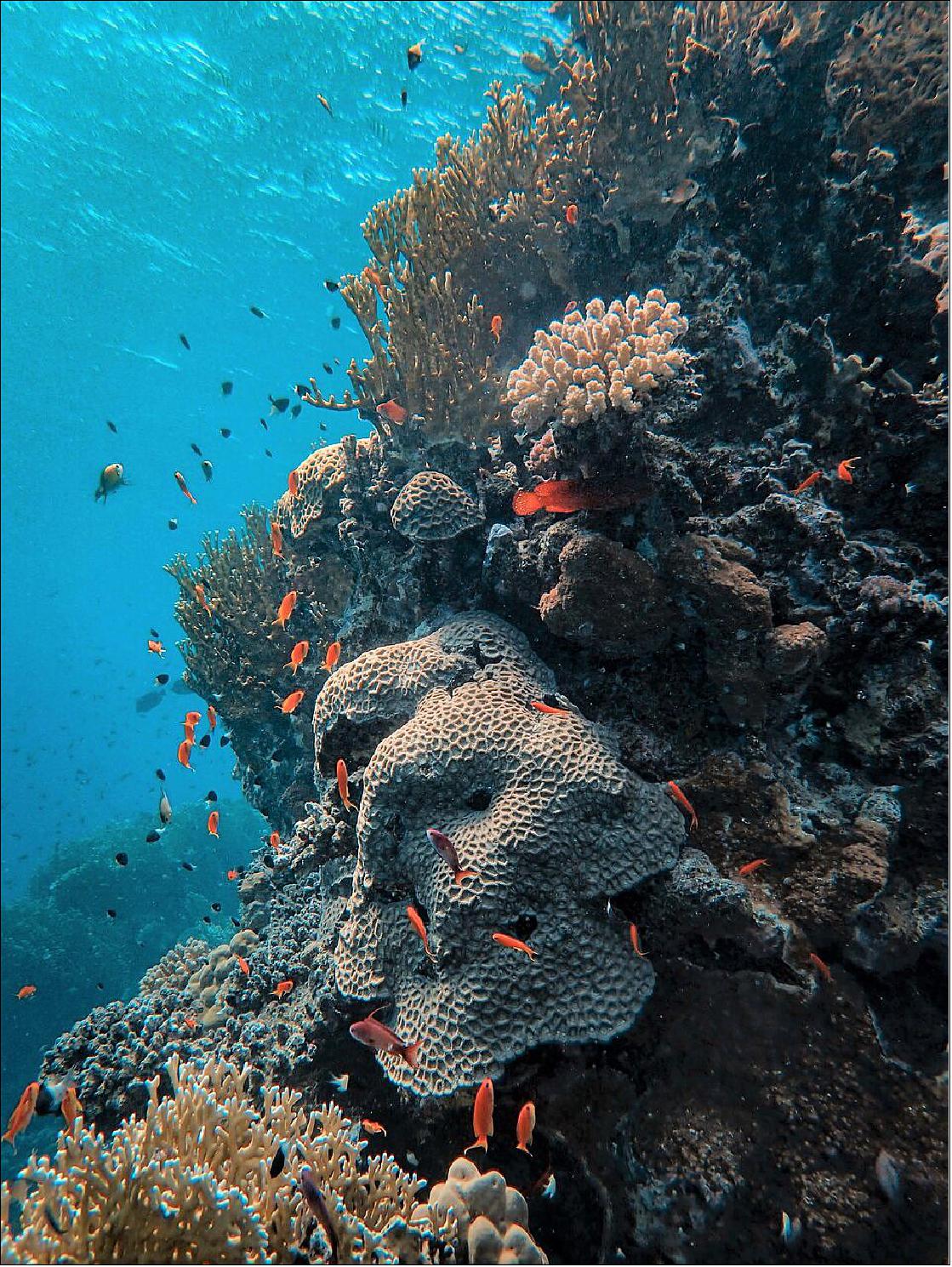
- Decreasing seawater pH, or ocean acidification, leads to a reduction in the carbonate ions that calcifying organisms, such as shellfish and corals, need to build and maintain their hard shells, skeletons and other calcium carbonate structures. If the seawater pH dips too low, shells and skeletons can even begin to dissolve.
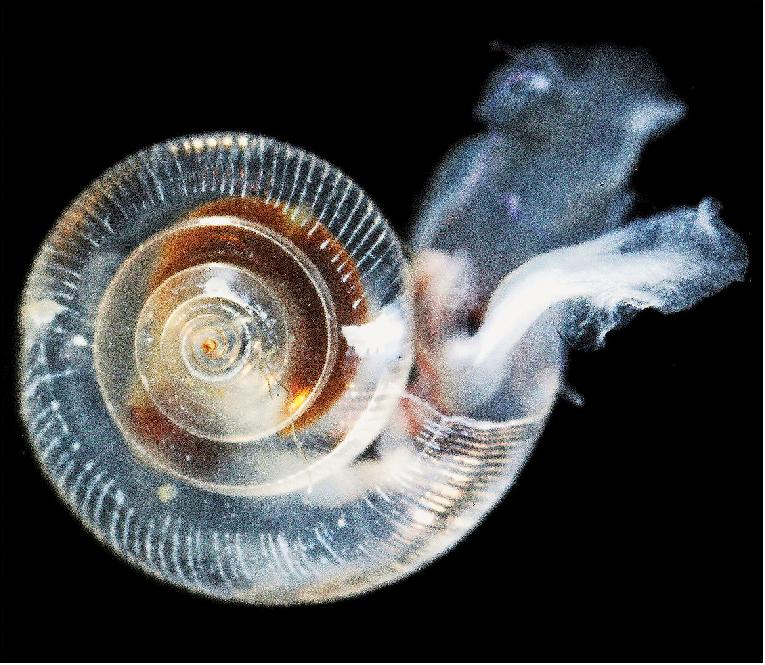
- While this poses serious consequences for some forms of marine life, there are potential damaging knock-on effects for the marine ecosystem as a whole. For example, the pteropod, or sea butterfly, is being affected by ocean acidification as the change in seawater pH can dissolve their shells. They may only be little sea snails, but they are important food for organisms ranging from tiny krill to huge whales.
- There are also other far-reaching consequences for us all because the health of our oceans is also important for regulating the climate, and essential for aquaculture and food security, tourism, and more.
- Being able to monitor changes in ocean acidification is therefore important for climate and environmental policy-making, and for understanding the implications for marine life.
- Measurements of seawater pH can be taken from ships, but these are readings are sparse and difficult to use to monitor change. However, variations in marine carbonate chemistry tend to be closely related to variations in temperature, salinity, chlorophyll concentration and other variables, many of which can be measured by satellites that have near-global coverage.
- A paper published recently in Earth System Science Data describes how scientists working in the OceanSODA project used measurements from ships and from satellites to show how ocean waters have become more acidic over the last three decades. 53)
- Luke Gregor, from ETH Zurich’s Institute of Biogeochemistry and Pollutant Dynamics and co-author of the paper, explained, “We used both in-situ and satellite measurements of sea-surface temperature, salinity and chlorophyll to derive changes in surface-ocean alkalinity and carbon dioxide concentrations, from which pH and calcium carbonate saturation state and other properties of ocean acidification can be computed.
- “To capture the complex relationship between changes in these variables and oceanic carbon, we used the power of machine learning.
- “This provided us with one of the first global-scale observation-based views of the surface-ocean carbonate system from 1985 to 2018. The results show a strong and gradual increase in the acidity of the ocean as it continues to absorb atmospheric carbon dioxide. Along with the increase in the ocean’s acidification, there is an associated decrease in the availability of the carbonate ion concentration, making it harder for organisms to grow their shells and skeletons.”
- The team used a range of different satellite data, including sea-surface temperature data from the Sea and Land Surface Temperature Radiometer carried on the Copernicus Sentinel-3 satellites and from the Advanced Very High Resolution Radiometer carried on Europe’s MetOp satellites and on the US National Oceanic and Atmospheric Administration’s POES satellites. This dataset came through ESA’s Climate Change Initiative.
- Information on chlorophyll was also thanks to a multi-sensor blended dataset through ESA’s GlobColour project and included data from the OLCI (Ocean and Land Color Instrument) on the Copernicus Sentinel-3 satellites.
- Information on ocean salinity was realized through a climate reanalysis dataset called SODA3.
- Dr Gregor noted, “Having this wealth of satellite data allows us to really understand what has been happening to our vast oceans over the last 30 years. Moreover, it is essential that we continue to use satellite data to the monitor oceans to further understand the resilience and sensitivity of coral reefs and other marine organisms to the increasing threats of ocean acidification.”
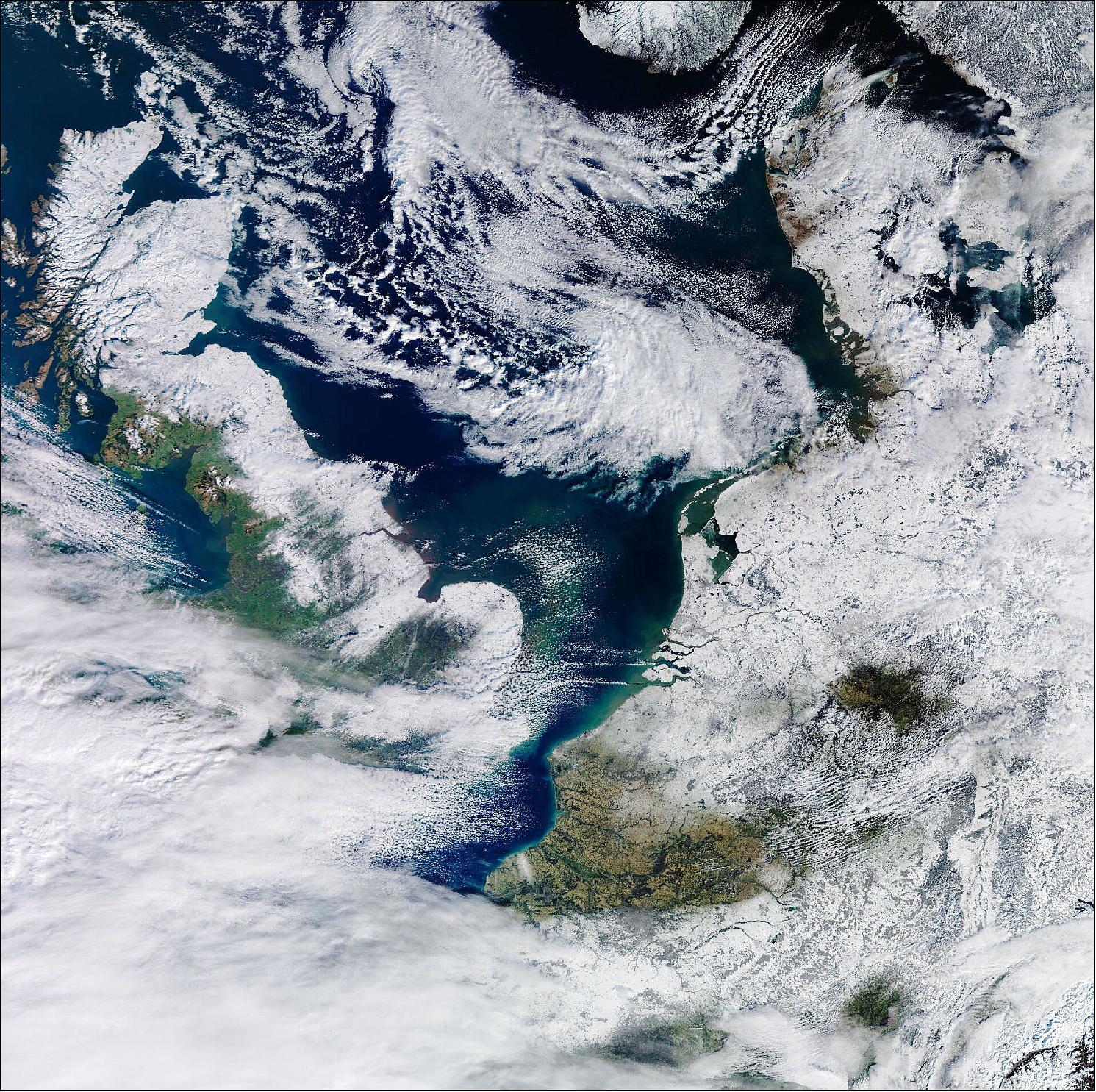
• February 11, 2021: Storm Darcy hit the Netherlands in the evening of Saturday 6 February as it pushed its way through much of northern Europe. Strong winds and bitter cold, which initiated a ‘code red’ weather warning, brought the country to an almost standstill as most public transport was cancelled the following day – by which time most of the country was under around 10 cm of snow. The snowfall also caused disruption to parts of the UK and Germany. 54)
- Although the snow stopped falling a day or so later, temperatures have remained below freezing, reawakening the Dutch passion for ice-skating. The Netherlands is home to the century-old ‘Elfstedentocht’, a 200-kilometer race on natural ice through 11 towns and cities in the northern province of Friesland. It was last held in 1997, but the current COVID pandemic restrictions mean that this historic race, which can attract thousands of participants and hundreds of thousands of spectators, is not permitted this year.
- Climate change is thought to be having an impact on the chances of conditions being right for an Elfstedentocht – the canal ice has to be at least 15 cm thick. According to the Dutch Meteorological Institute, KNMI, a century ago, there was a 20% chance every year of it being cold enough to organise the race, this has now decreased to an 8% chance.
- Copernicus Sentinel-3 is a two-satellite mission to supply the coverage and data delivery needed for Europe’s Copernicus environmental monitoring programme. Each satellite carries the same suite of four sensors. This image, showing snow cover in the Netherlands, northern France, Belgium, Luxembourg, Denmark, part of the UK and part of Germany, was captured by the mission’s ocean and land cover instrument.
• January 13, 2021: The heavy snowfall that hit Spain a few days ago still lies heavy across much of the country as this Copernicus Sentinel-3 satellite image shows. 55)
- Storm Filomena hit Spain over the weekend, covering a large part of the country in thick snow. Madrid one of the worst affected areas (see satellite image), was brought to a standstill with the airport having to be closed, trains cancelled and roads blocked.
- People in central Spain are struggling as a deep freeze follows the heavy snow. Yesterday, the temperature plunged to –25°C in Molina de Aragón and Teruel, in mountains east of Madrid – Spain's coldest night for at least 20 years.
- Copernicus Sentinel-3 is a two-satellite mission. Each satellite carries a suite of cutting-edge instruments to measure systematically Earth’s oceans, land, ice and atmosphere to monitor and understand large-scale global dynamics. For example, with a swath width of 1270 km, the ocean and land color instrument, which acquired the two tiles for this image, provides global coverage every two days.

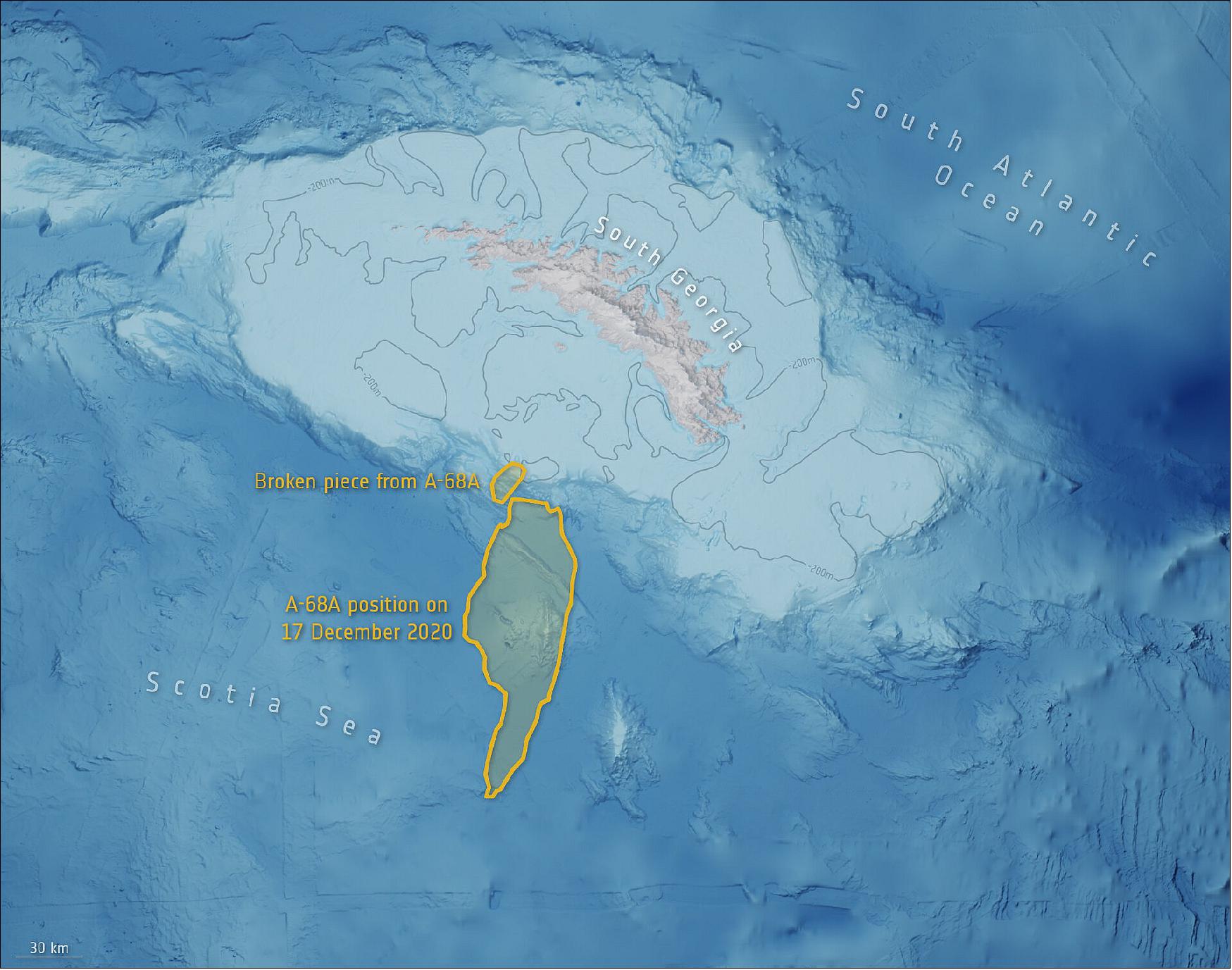
• December 18, 2020: A large block of ice has broken off the northern tip of the A-68A iceberg as seen in new images captured by the Copernicus Sentinel-3 mission. 56)
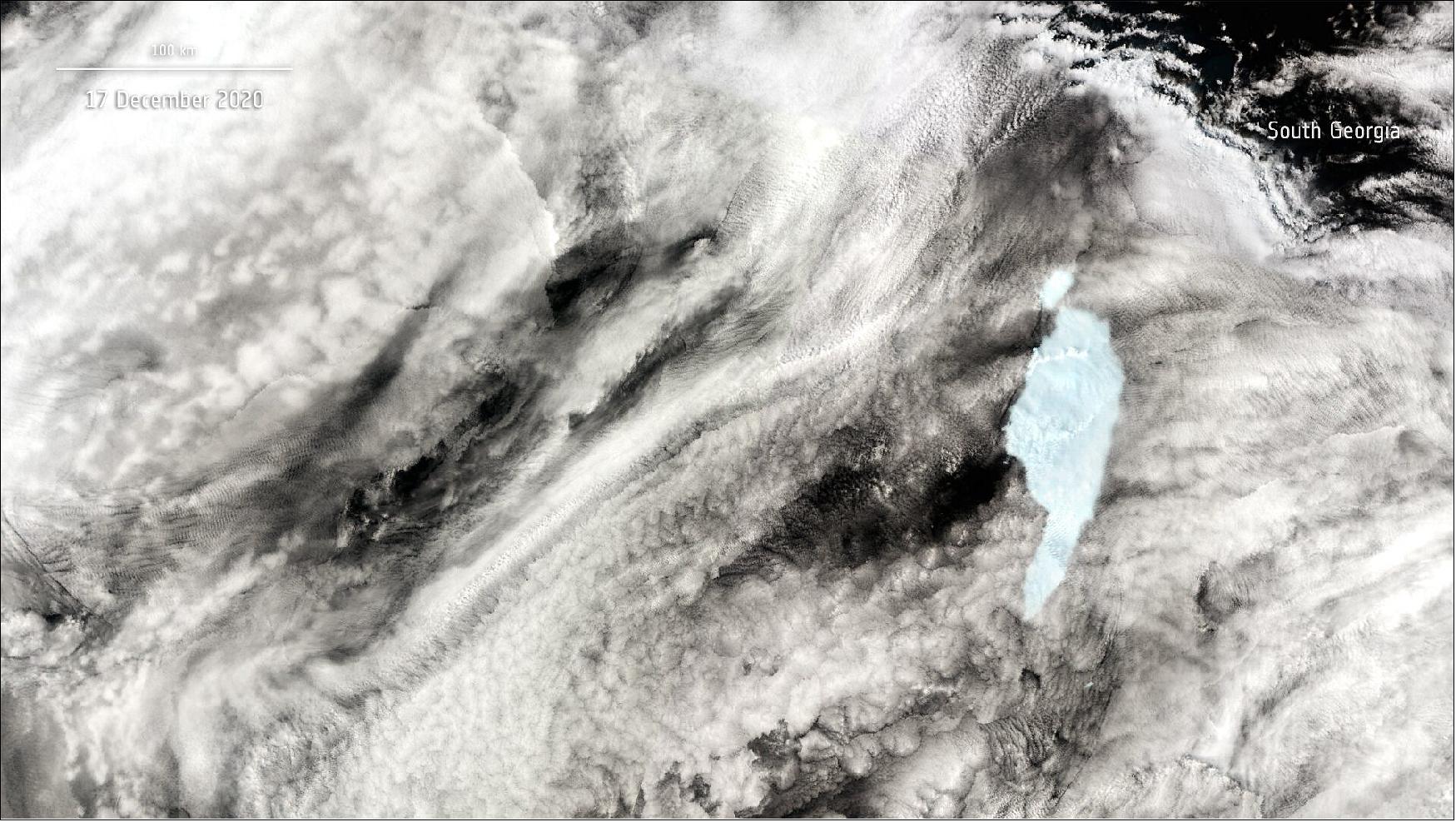
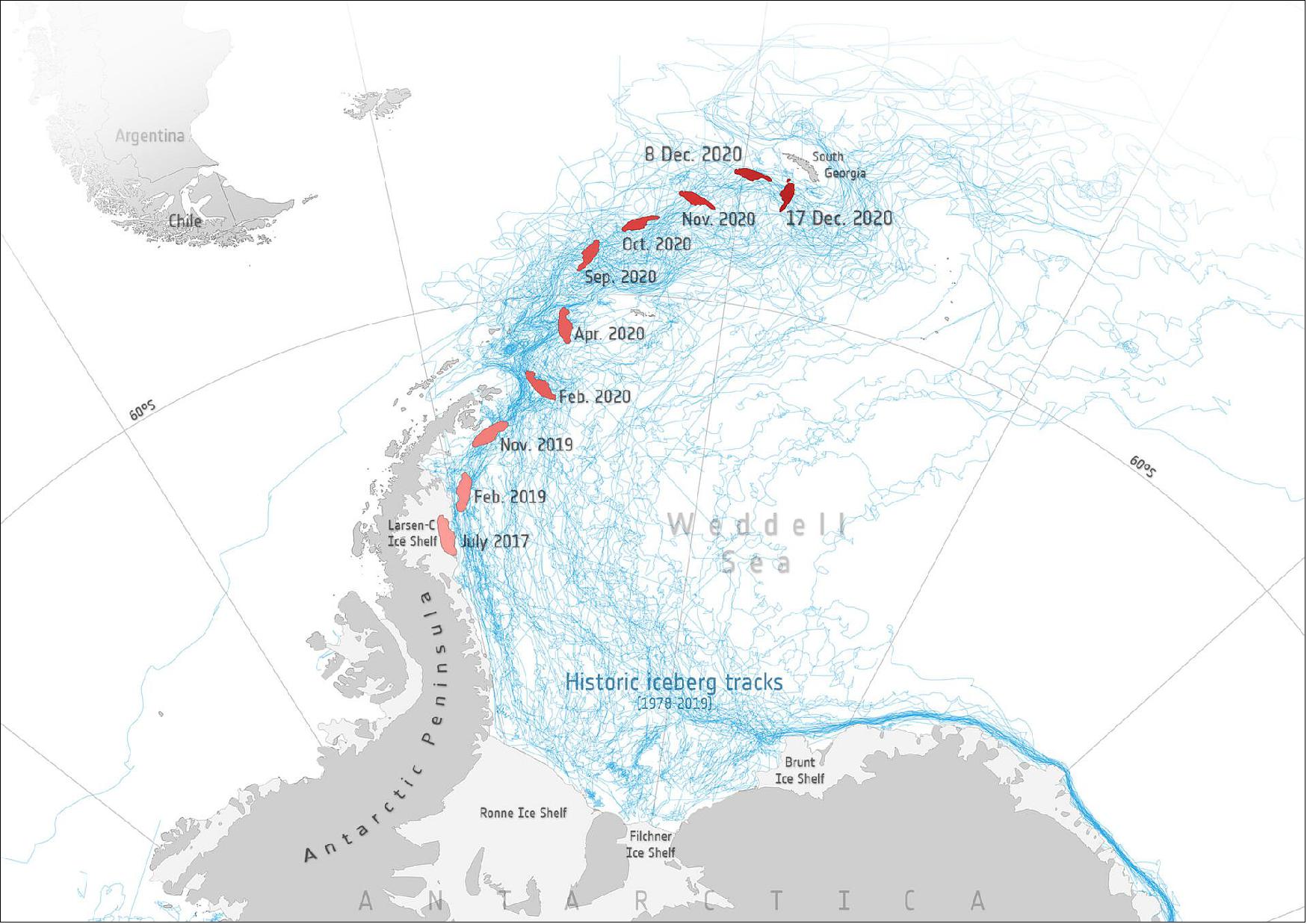
- Satellite missions have been used to track the A-68A berg on its journey since 2017, when it broke off the Larsen C ice shelf in Antarctica. Over the past weeks, the A-68A iceberg has drifted alarmingly close to the remote island of South Georgia, where scientists feared that the iceberg could ground in the shallow waters offshore and threaten wildlife.
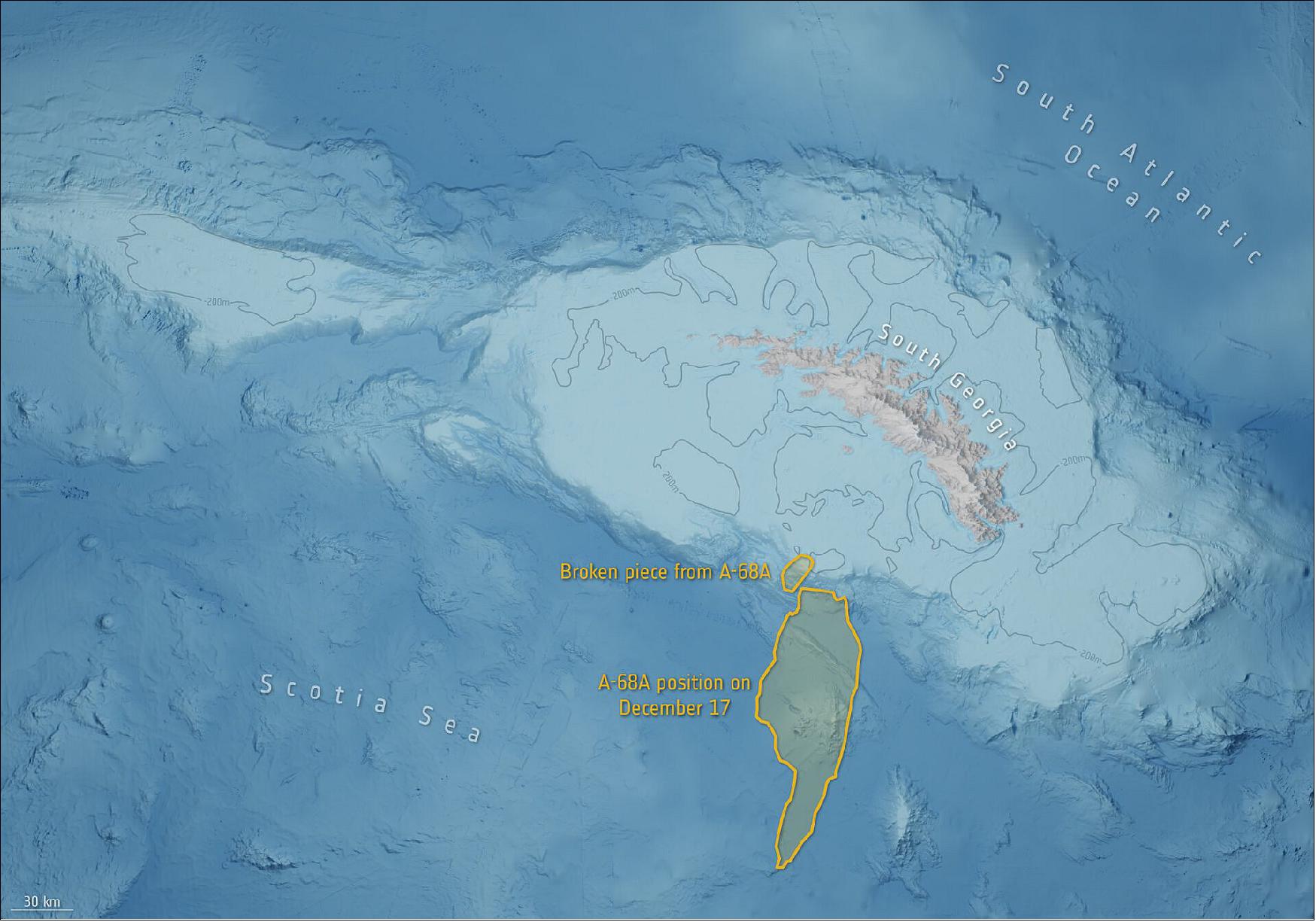
- New satellite images revealed yesterday that the iceberg has spun around in a clockwise direction, moving one end of the berg closer to the shelf and into shallow waters. In doing so, the berg could have scraped the seafloor, measuring less than 200 m deep, causing an enormous block of ice to snap off the iceberg’s northern tip.
- The new chunk of ice is around 18 km long and approximately 140 km2, around the same size as Seville, Spain, and can be seen detached from the main A-68A iceberg in the images. Despite its small appearance in the images, the new piece of ice is so large it will most likely be named A-68D by the US National Ice Center in the coming days. Two other chunks of ice that previously broke off were named A-68B and A-68C.
- The main A-68A iceberg is now approximately 3700 km2 with a length of around 135 km. Having lost many other pieces of ice over the past weeks, A-68A has now lost its title as the world’s largest iceberg. First place now passes onto the A-23A iceberg, which is currently stuck in the Weddell Sea, with a size of almost 4000 km2.
- It is still unclear where the main A-68A iceberg will now travel. Carried by currents, it could continue its journey around the island of South Georgia as many other previous icebergs have done in the past, moving in a southeast direction, before turning north.
• December 17, 2020: The snow-covered Alps are featured in this image captured by the Copernicus Sentinel-3 mission. 57)
- Just south of the Alps, the typical winter fog and haze can be seen over the Po Valley. The haze is most likely to be a mix of both fog and smog, trapped at the base of the Alps owing to both its topography and atmospheric conditions. Patches of snow can also be seen on the island of Corsica, Croatia and at the bottom of the Apennines in central Italy.

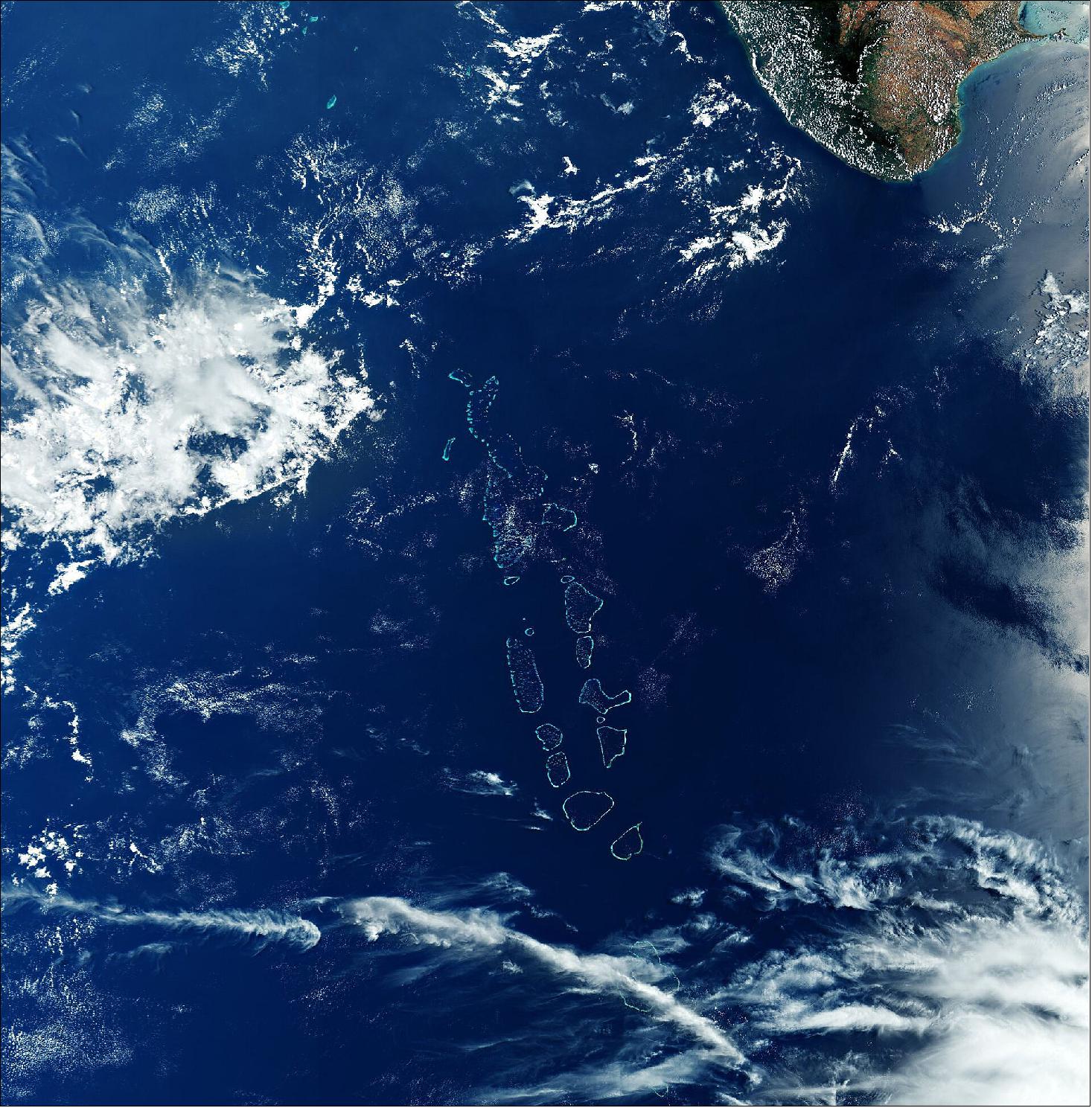
• October 30, 2020: All 1200 islands that make up the Republic of Maldives are featured in this spectacular image captured by the Copernicus Sentinel-3 mission. 58)
- The ocean and color instrument onboard the Copernicus Sentinel-3 mission has a swath width of 1270 km which allows us to enjoy this wide view of the Maldive Islands and its surroundings. A popular tourist destination, the Maldives lie in the Indian Ocean, around 700 km southwest of the southernmost tip of mainland India, visible in the top-right of the image.
- The nation consists of a chain of small coral islands that are grouped into clusters of atolls – visible as circular or oval-shaped reef structures in the middle of the image. Scattered across 90,000 km2 of ocean, the Maldives are one of the most geographically dispersed countries in the world. The islands extend more than 820 km from north to south and around 130 km from east to west.
- Different cloud formations can be seen dotted around the image, the difference in appearance is most likely due to the different height above the surface. The Maldive archipelago is frequently covered by clouds, making this almost cloud-free image quite rare.
- One of the world’s lowest-lying countries, more than 80% of the Maldives’ land is less than one meter above mean sea level, making its population of over 500,000 people extremely vulnerable to sea swells, storm surges and severe weather. The Special Report on the Ocean and Cryosphere in a Changing Climate on sea level rise states that the global mean sea level is likely to rise to around 1 m by the end of this century, which could ultimately cover the majority of the nation.
- Scheduled for launch on 10 November from the Vandenberg Air Force Base in California, the Copernicus Sentinel-6 Michael Freilich satellite is the first of two identical satellites to be launched sequentially to provide accurate measurements of sea-level change.
- In order to better understand how rising seas will impact humanity, scientists and researchers need long climate records. Copernicus Sentinel-6 will take on the role of radar altimetry reference mission, continuing the long-term record of measurements of sea-surface height started in 1992 by the French-US Topex Poseidon and then the Jason series of satellite missions. By continuing this time series, Sentinel-6 will allow for further climate research and help scientists monitor the effects of climate change.
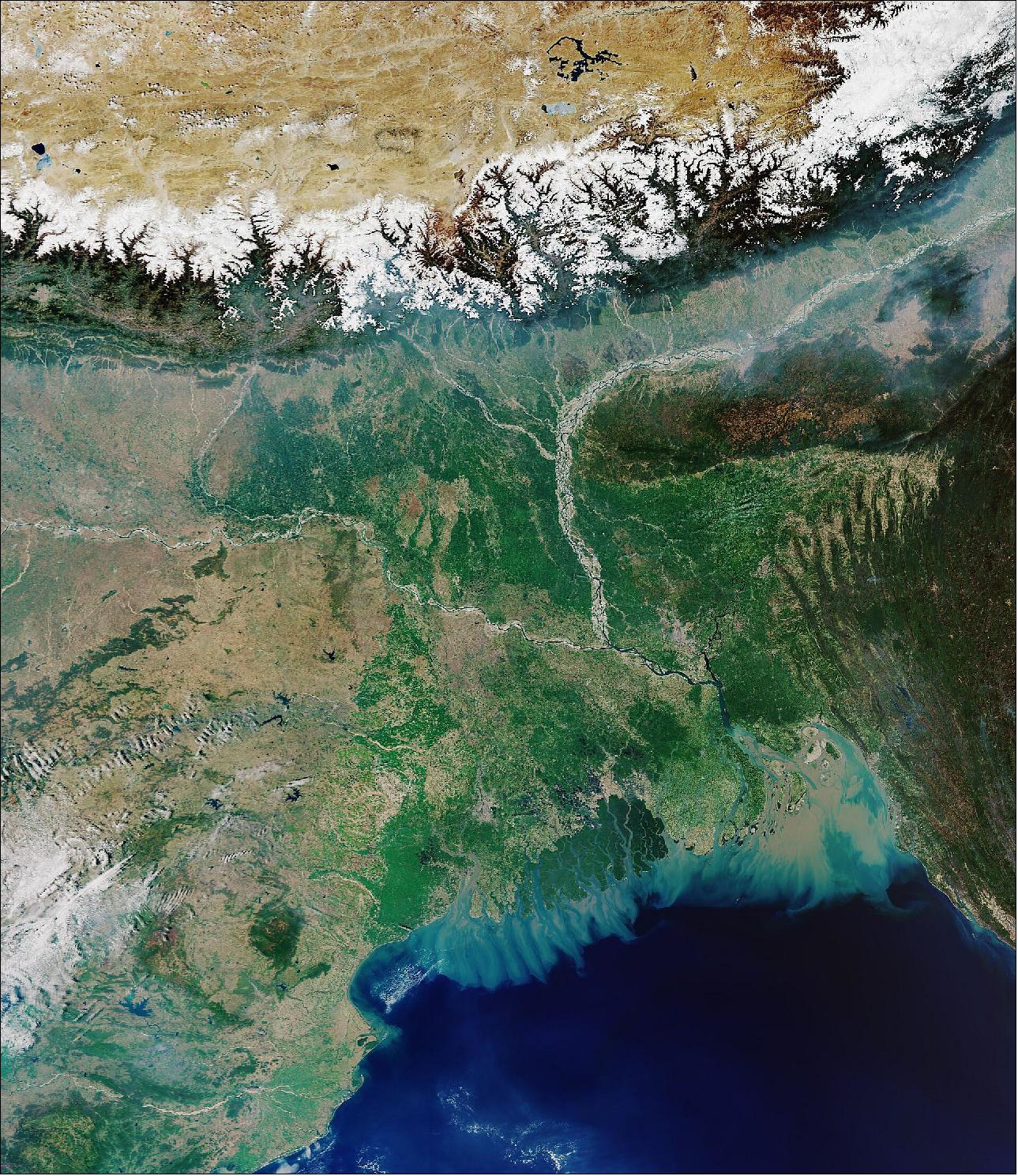
• October 23, 2020: The Copernicus Sentinel-3 mission takes us over the Ganges Delta – the world’s largest river delta. 59)
- Covering an area of around 100 000 km2, the Ganges Delta lies in both Bangladesh and the State of West Bengal in India. The delta is formed mainly by the large, sediment-laden waters of the Ganges and Brahmaputra rivers (Figure 43).
- The Ganges river carries fertile soil and nutrients, which it deposits across its vast delta floodplain. The river flows for over 2400 km from the Himalayas before emptying into the Bay of Bengal – the world’s largest bay. It is here where the murky colored waters mix with the darker colored waters of the Indian Ocean.
- The delta is largely covered with a swamp forest, known as the Sundarbans, and can be seen in dark green near the coast with several rivers snaking through it. The Sundarbans, which translates as 'beautiful forest' in Bengali, are the world’s largest mangrove forest and provide a critical habitat for numerous species, including the Bengal tiger and the Indian python.
- The city of Kolkata (formerly Calcutta) is visible near the Sundarbans in the lower-center of the image. With over 14 million inhabitants, Kolkata is one of India’s largest cities and is the dominant urban center of eastern India. Dhaka, the capital of Bangladesh, can be seen in the lower-right of the image, just north of the Buriganga river. Dhaka is Bangladesh’s most populous city and is one of the largest metropolises in South Asia.
- With a population of over 100 million people, the delta is one of the most densely populated deltas in the world and is extremely vulnerable to climate change. The residents of this region are particularly at risk from repeated catastrophic floods due to heavy runoff of meltwater from the Himalayas, intense rainfall during the monsoon season and from accelerated sea-level rise exacerbated by land subsidence.
- Sea-level rise is a global issue, but regional differences in sea-level rise put some places at risk more than others. In the coming decades, Asia is likely to feel the worst effects because of the number of people living in low-lying coastal regions. Bangladesh, India, China, Vietnam, Indonesia and Thailand are home to the greatest number of people who today live on land that could be threatened by permanent inundation by 2100.
- It is vital that the changing height of the sea surface continues to be closely monitored over the coming decades. Set to launch next month, the Copernicus Sentinel-6 mission will be key in undertaking this important role until at least 2030. Renamed in honor of the former director of NASA’s Earth Science Division, the Copernicus Sentinel-6 Michael Freilich satellite is the first ESA-developed satellite to be given a ride into space on the SpaceX Falcon 9 rocket, the world’s first orbital class reusable rocket.
- Since the satellite arrived at Vandenberg Air Force Base in California on 24 September, it has been transferred to the SpaceX Payload Processing Facility, unpacked and undergone a series of tests to make sure all will be well during the rigors of liftoff and during its five-plus years in orbit around Earth.
• September 22, 2020: Earth’s oceans help to slow global warming by absorbing carbon from our atmosphere – but fully observing this crucial process in the upper ocean and lower atmosphere is difficult, as measurements are taken not where it occurs, the sea surface, but several meters below. New research uses data from ESA, NASA and NOAA satellites to rectify this, and finds that far more carbon is absorbed by the oceans than previously thought. 60)
Much of the carbon dioxide emitted by human activity does not stay in the atmosphere but is taken up by oceans and land vegetation – so-called ‘carbon sinks’.
There are ongoing efforts to collect and compile in situ measurements of the ocean sink in the form of the SOCAT ( Surface Ocean CO2 Atlas), which contains over 28 million international observations of our oceans and coastal seas from 1957 to 2020. By delving into SOCAT’s vast database, scientists can identify how much carbon is being sucked out of the atmosphere and stored by our seas.
“However, there’s a catch: the measurements are not made right at the ocean surface where they are needed, but from a few meters down,” explains Andrew Watson of the University of Exeter, UK, lead author of the new study. Although the difference may be mere meters, the sea surface temperature changes with depth – and so, too, does its associated ability to absorb carbon from the atmosphere.
“Previous studies have ignored the small temperature differences between the surface of the ocean and the sampling depth, but we know that this has a significant impact on how carbon is held by the oceans in terms of salinity, solubility, stability, and so on,” adds Andrew. “But satellites can measure the temperature more or less exactly at the ocean surface – and when we do this, we find it makes a big difference.”
By applying satellite corrections to SOCAT data from 1992 to 2018 to account for temperature differences between the surface and at a few meters’ depth, the researchers find a substantially higher ocean uptake of carbon dioxide than previously thought. They were able to do this thanks to data from a suite of satellites such as ESA’s Envisat, NOAA’s AVHRR, EUMETSAT’s MetOp series, and the Copernicus Sentinel-3 mission, firstly as part of the OceanFlux research project (part of ESA’s Science for Society program) and then continued within two EU-funded projects.
The corrected figures reveal that the net flux of carbon into the oceans is underestimated by up to 0.9 Gigatons of carbon per year – a significant amount that, at times, doubles uncorrected values.
“These results are consistent with independent estimates of the size of the oceanic carbon sink – those based on global ocean surveys by research ships,” adds co-author Jamie Shutler, also of the University of Exeter. “Now that these two separate estimates of the size of the carbon dioxide ocean sink agree pretty well, we can view and use their results with greater confidence, and trust that they are most likely giving us an accurate picture of what is going on.”
Andrew and Jamie were both part of a Europe-wide research team – including researchers from Heriot-Watt University and UHI, Scotland – that previously used SOCAT data to estimate how carbon flows into and out of our oceans with unprecedented accuracy. They found that, in 2010 alone, three Gigatons of carbon were drawn into the ocean: about a third of the emissions caused by human activity. This finding contrasted with previous estimates of a quarter, leading Andrew, Jamie and colleagues to conclude – as in this study – that the oceans’ role in capturing atmospheric carbon is being underestimated.
While this may bring positive benefits in terms of reducing atmospheric warming due to climate change, as more carbon dioxide is being removed from the air, the oceans are impacted by the carbon they absorb. They become more acidic, which threatens the health of marine ecosystems and makes it increasingly difficult for ocean life to survive.
“The importance of our oceans in both regulating climate and supporting biodiversity cannot be overstated,” adds ESA’s Craig Donlon. “Across all of ESA’s Earth observation activities, our aim is to fully account for the role of our oceans in terms of the carbon cycle. This key result, together with others built on the dedication and excellent collaboration of the ESA OceanFlux team, gives us a solid basis for that, and will help us to more accurately characterize and better understand our planet’s changing climate.”
• September 18, 2020: 'Medicane' Ianos. Medicanes are similar in form to hurricanes and typhoons, but can form over cooler waters. While hurricanes move east to west, medicanes move from west to east. 62)
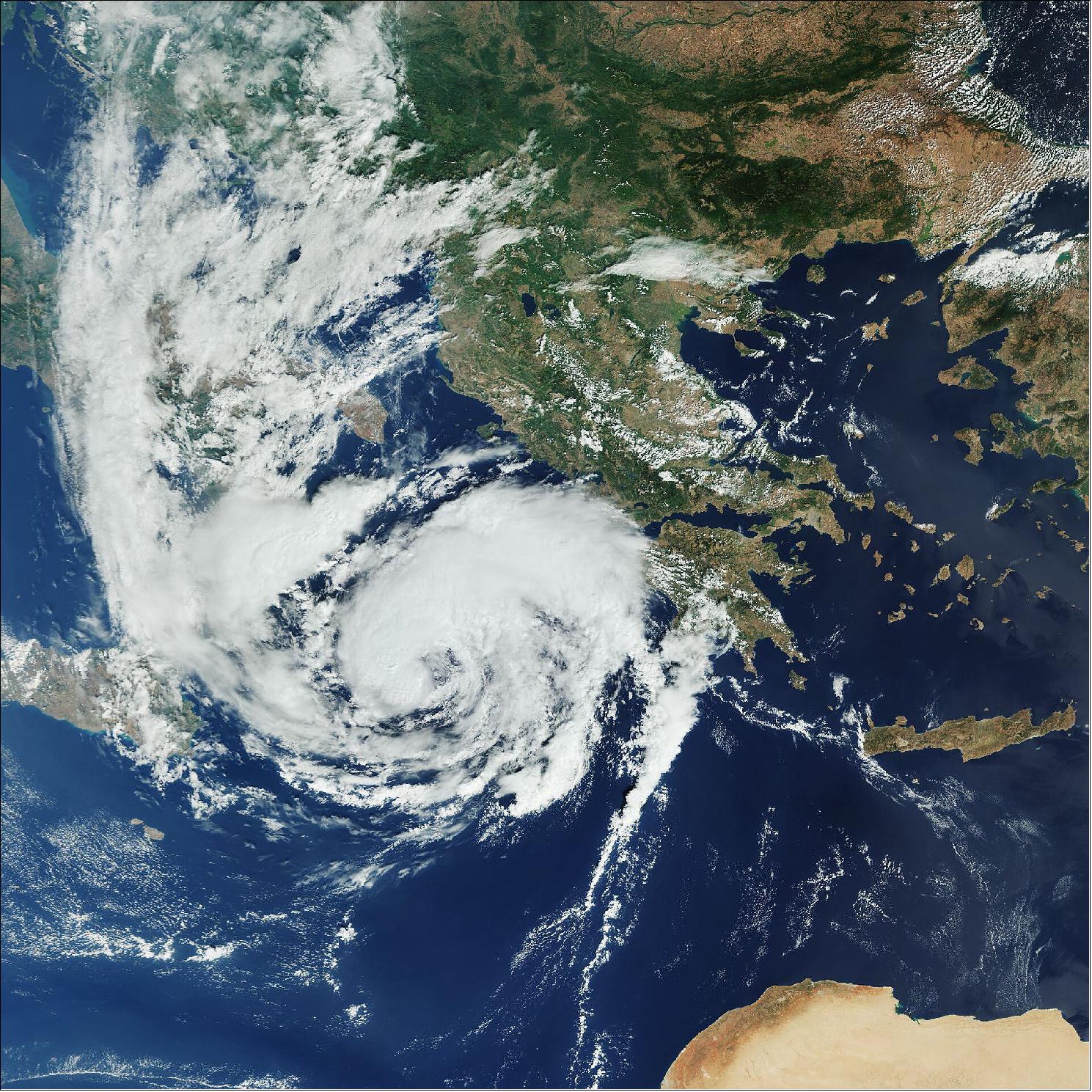
- Sentinel-3 is a two-satellite mission to supply the coverage and data delivery needed for Europe’s Copernicus environmental monitoring program. Each satellite’s instrument package includes an optical sensor to monitor changes in the color of Earth’s surfaces.
• September 11, 2020: The Western US states have been battling close to 100 wildfires, blanketing the majority of the west coast in smoke. Captured on 10 September, this Copernicus Sentinel-3 image shows the extent of the smoke plume which, in some areas, has caused the sky to turn orange. 63)
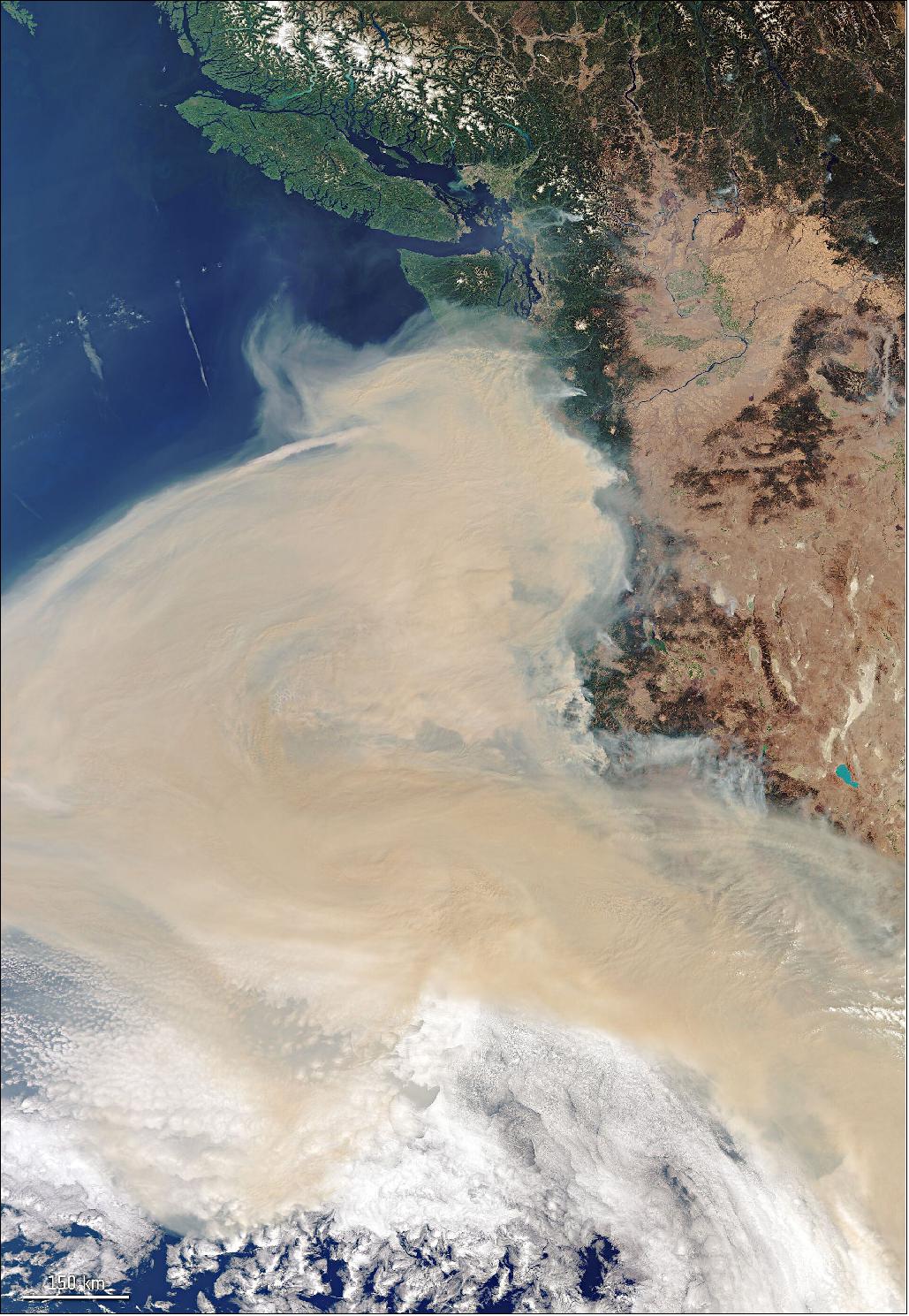
- The cities of Portland, Eureka, Eugene, San Francisco and Sacramento are all blanked in smoke. In the top of the image, the cities of Vancouver and Seattle are visible.
- Sentinel-3 is a two-satellite mission to supply the coverage and data delivery needed for Europe’s Copernicus environmental monitoring program. Each satellite’s instrument package includes an optical sensor to monitor changes in the color of Earth’s surfaces. It can be used, for example, to monitor ocean biology and water quality.
• August 28, 2020: As we eagerly await the return of our Earth from Space program next Friday, today the Copernicus Sentinel-3 mission shows us a rare, cloud-free view of Iceland captured on 14 August 2020. 64)
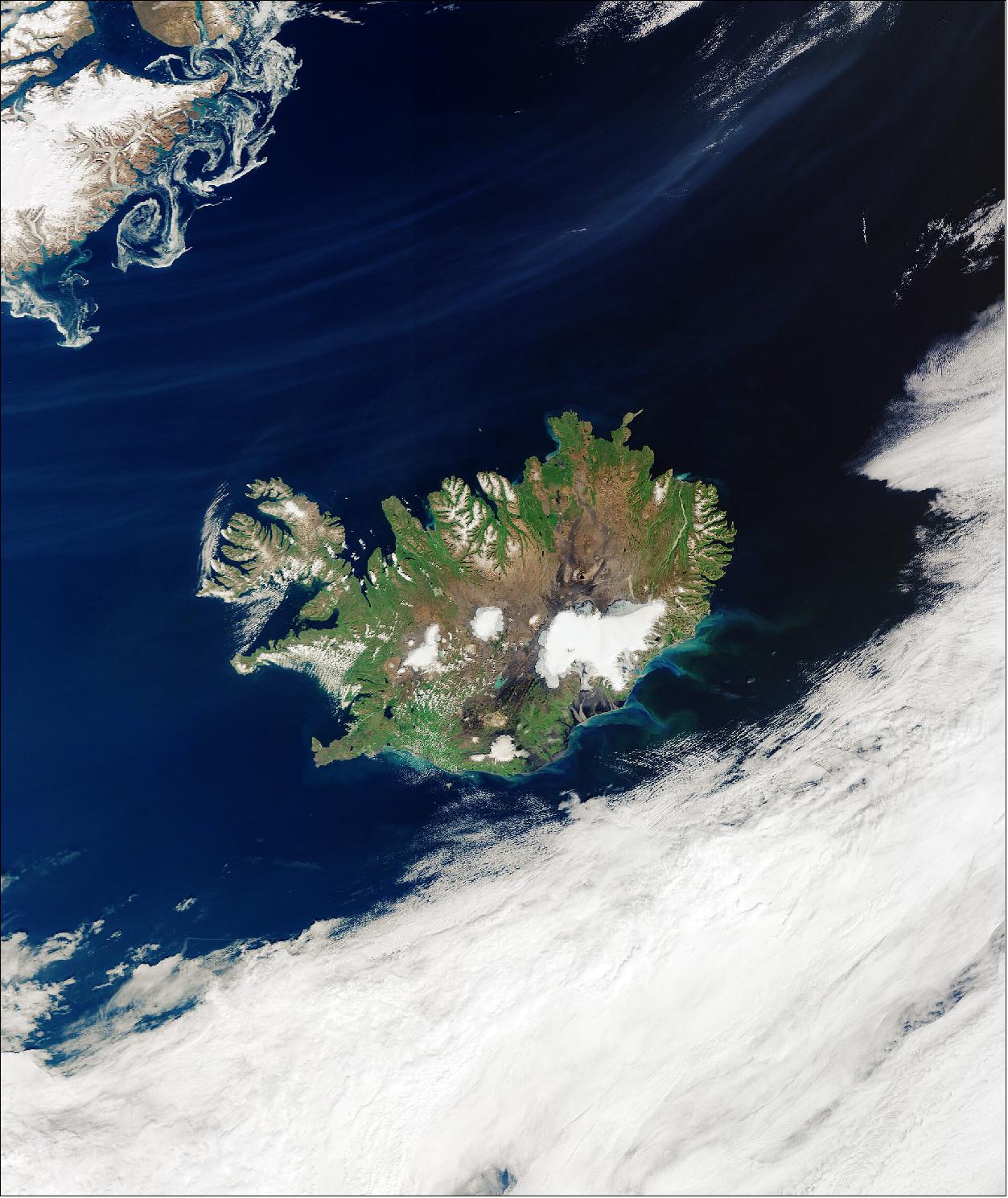
• August 27, 2020: Over the past months, the Arctic has experienced alarmingly high temperatures, extreme wildfires and a significant loss of sea ice. While hot summer weather is not uncommon in the Arctic, the region is warming at two to three times the global average – impacting nature and humanity on a global scale. Observations from space offer a unique opportunity to understand the changes occurring in this remote region. 65)
- According to the Copernicus Climate Change Service, July 2020 was the third warmest July on record for the globe, with temperatures 0.5°C above the 1981-2010 average. In addition, the Northern Hemisphere saw its hottest July since records began — surpassing the previous record set in 2019.
- The Arctic has not escaped the heat. On 20 June, the Russian town of Verkhoyansk, which lies above the Arctic Circle, recorded a staggering 38°C. Extreme air temperatures were also recorded in northern Canada. On 11 August, Nunavut’s Eureka Station, located in the Canadian Arctic at 80 degrees north latitude, recorded a high of 21.9°C – which were reported as being the highest temperature ever recorded so far north.
- Although heatwaves in the Arctic are not uncommon, the persistent higher-than-average temperatures this year have potentially devastating consequences for the rest of the world. Firstly, the high temperatures fuelled an outbreak of wildfires in the Arctic Circle. Images captured by the Copernicus Sentinel-3 mission show some of the fires in the Chukotka region, the most north-easterly region of Russia, on 23 June 2020.
- Wildfire smoke releases a wide range of pollutants including carbon monoxide, nitrogen oxides and solid aerosol particles. In June alone, the Arctic wildfires were reported to have emitted the equivalent of 56 megatons of carbon dioxide, as well as significant amounts of carbon monoxide and particulate matter. These wildfires affect radiation, clouds and climate on a regional, and global, scale.
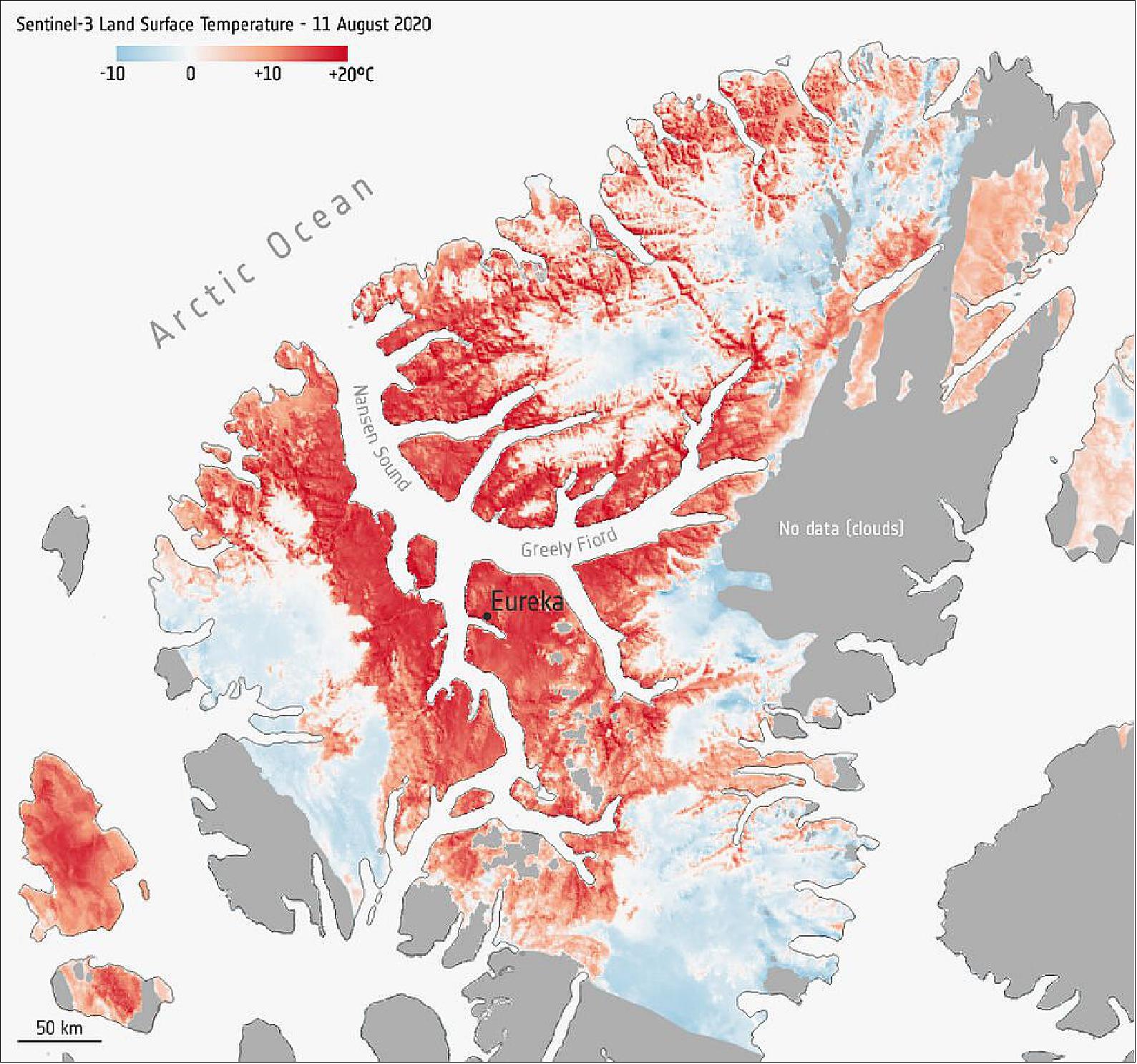
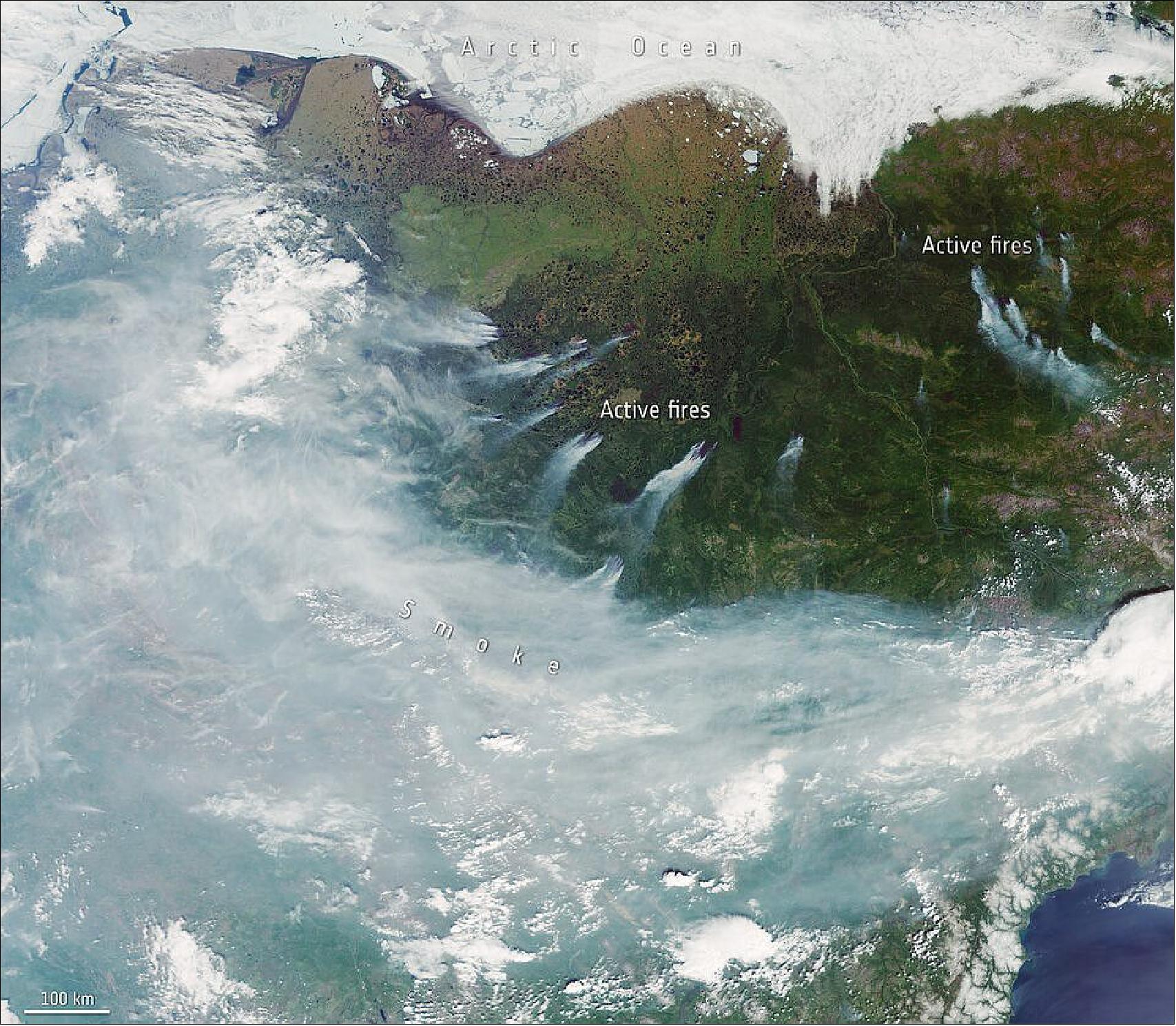
- The Arctic heatwave also contributes to the thawing of permafrost. Arctic permafrost soils contain large quantities of organic carbon and materials left over from dead plants that cannot decompose or rot, whereas permafrost layers deeper down contain soils made of minerals. The permanently frozen ground, just below the surface, covers around a quarter of the land in the northern hemisphere.
- When permafrost thaws, it releases methane and carbon dioxide into the atmosphere – adding these greenhouse gases to the atmosphere. This, in turn, causes further warming, and further thawing of the permafrost – a vicious cycle.
- According to the UN’s Intergovernmental Panel on Climate Change Special Report, permafrost temperatures have increased to record-high levels from the 1980s to present. Although satellite sensors cannot measure permafrost directly, a recent project by ESA’s Climate Change Initiative (CCI), combined in situ data with satellite measurements of land-surface temperature and land cover to estimate permafrost extent in the Arctic.
- The thaw of permafrost is also said to have caused the collapse of the oil tank that leaked over 20,000 tons of oil into rivers near the city of Norilsk, Russia, in May.
- The Siberian heatwave is also recognized to have contributed to accelerating the sea-ice retreat along the Arctic Russian coast. Melt onset was as much as 30 days earlier than average in the Laptev and Kara Seas, which has been linked, in part, to persistent high sea level pressure over Siberia and a record warm spring in the region. According to the Copernicus Climate Change Service, the Arctic sea ice extent for July 2020 was on a par with the previous July minimum of 2012 – at nearly 27% below the 1981-2020 average.
- ESA’s Mark Drinkwater comments, “Throughout the satellite era, polar scientists pointed to the Arctic as a harbinger of more widespread global impacts of climate change. As these interconnected events of 2020 make their indelible marks in the climate record, it becomes evident that a ‘green’ low-carbon Europe is alone insufficient to combat the effects of climate change.”
- Without concerted climate action, the world will continue to feel the effects of a warming Arctic. Because of the Arctic’s harsh environment and low population density, polar orbiting space systems offer unique opportunities to monitor this environment. ESA has been monitoring the Arctic with its Earth-observing satellites for nearly three decades. Satellites not only can monitor changes in this very sensitive region, but can also facilitate navigation and communications, improve Arctic maritime security, and enable more effective management of sustainable development.
- ESA’s Director for Earth Observation, Josef Aschbacher, adds, “Whilst the first generation of Copernicus Sentinels today offer excellent global data, their combined Arctic observation capabilities are limited in scope. As part of the preparation of Copernicus 2.0, three new high priority candidate missions: CIMR, CRISTAL and ROSE-L, and next-generation Sentinels are being prepared by ESA.
- “Together with the Copernicus CO2M mission, these new missions will provide new pan-Arctic, year-round monitoring and CO2 emissions data to support the EU Green Deal and further boost the Copernicus climate change monitoring and service capabilities.”
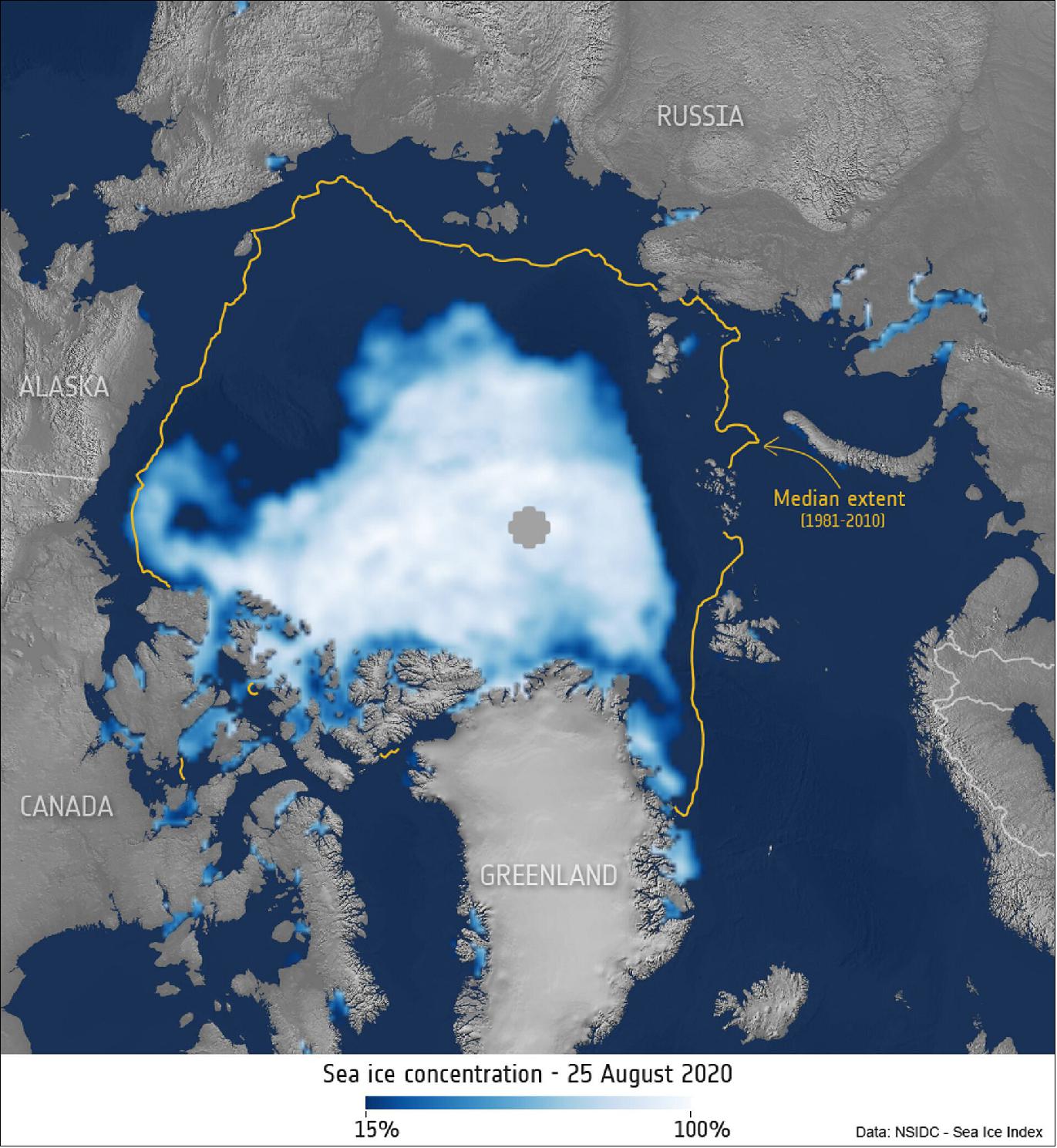
• August 20, 2020: Amid the blistering California heatwave, which is in its second week, there are around 40 separate wildfires across the state. Record high temperatures, strong winds and thunderstorms have created the dangerous conditions that have allowed fires to ignite and spread. The fires are so extreme in regions around the San Francisco Bay Area that thousands of people have been ordered to evacuate. 66)

• June 8, 2020: Today marks World Oceans Day, a day that aims to raise awareness in protecting and restoring our oceans and its resources. Today, and every day, Earth observing satellites continuously watch over the ocean to monitor and protect our environment. 67)
- Covering more than 70% of Earth’s surface, the oceans are what makes this our Blue Planet. Our seas influence the climate, produce the oxygen we breathe, serve as a means of transport and a major source of food and resources.
- But they are under stress from climate change, pollution and ocean acidification – all of which affect ecosystems and biodiversity. Satellite data increase our scientific understanding and support a range of environmental monitoring services in support of ocean conservation. From water saltiness to wave height, through sea level, sea ice and phytoplankton, satellites take stock of the ocean in many different ways.
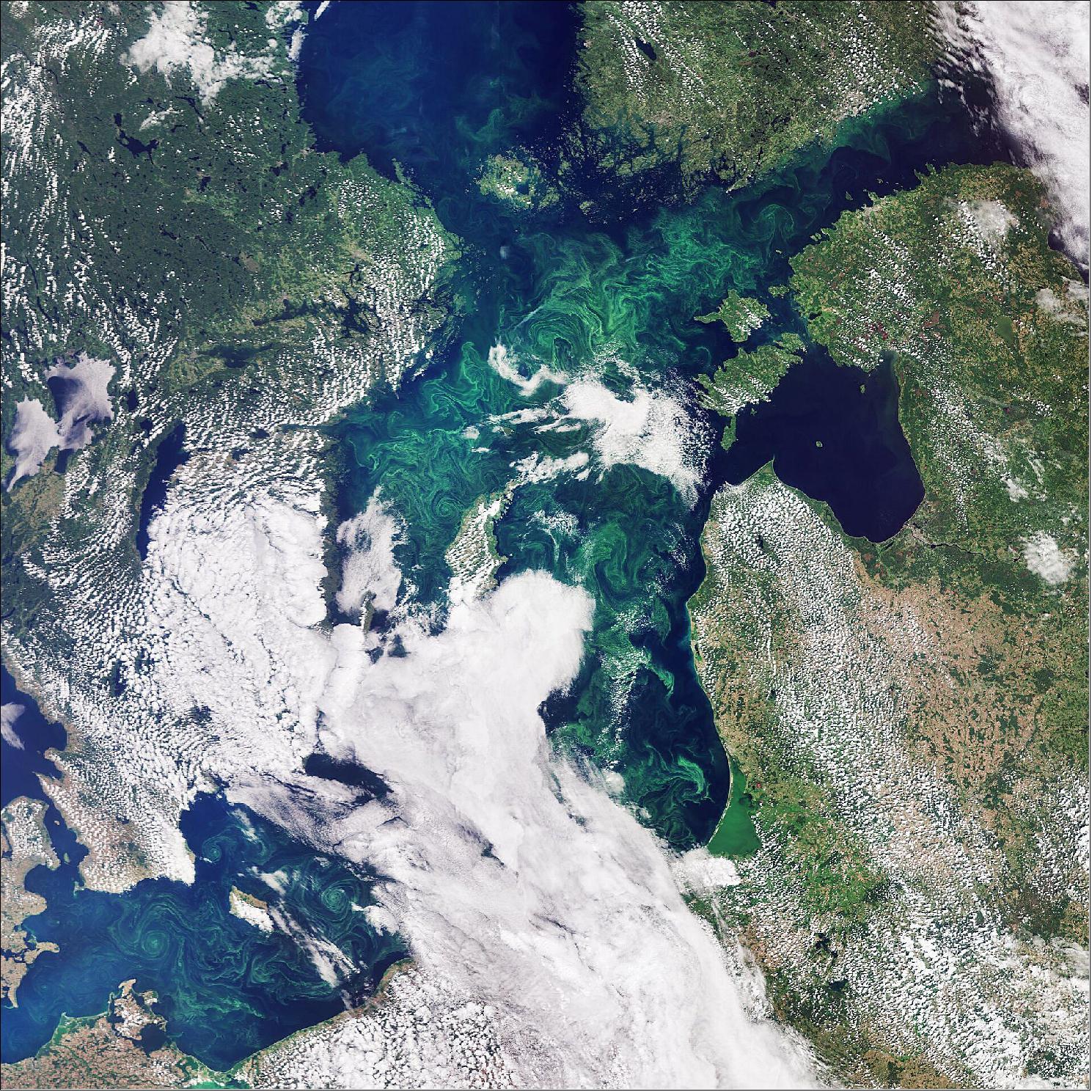
- Satellite data can track the growth and spread of harmful algae blooms in order to alert and mitigate against damaging impacts for tourism and fishing industries. Learn more about the seas that surround us and how satellite monitoring helps protect them.
• May 8, 2020: Lying in the North Atlantic Ocean, Greenland is the world’s largest island and is home to the second largest ice sheet after Antarctica. Greenland’s ice sheet covers more than 1.7 million km2 and covers most of the island. 68)
- Ice sheets form in areas where snow that falls in winter does not melt entirely over the summer. Over thousands of years, layers of snow pile up into thick masses of ice, growing thicker and denser as the new snow and ice layers compress the older layers.
- Ice sheets are constantly in motion. Near the coast, most of the ice moves through relatively fast-moving outlets called ice streams, glaciers and ice shelves.
- In this image (Figure 54), sea ice and icebergs can be seen in the Nares Strait – the waterway between Greenland and Canada’s Ellesmere Island, visible top left in the image. On the tip of Ellesmere Island lies Alert – the northernmost known settlement in the world. Inhabited mainly by military and scientific personnel on rotation, Alert is about 800 km from the closest community, which is roughly the same distance from Alert to the North Pole.
- Scientists have used data from Earth-observing satellites to monitor Greenland’s ice sheet. According to a recent study, both Greenland and Antarctica are losing mass six times faster than they were in 1990s. Between 1992 and 2017, Greenland lost 3.8 trillion tons of ice – corresponding to around 10 mm contribution to global sea-level rise.
- Melting ice sheets caused by rising temperatures and the subsequent rising of sea levels is a devastating consequence of climate change, especially for low-lying coastal areas. The continued satellite observations of the Greenland ice sheet are critical in understanding whether ice mass loss will continue to accelerate and the full implications of this anticipated change.
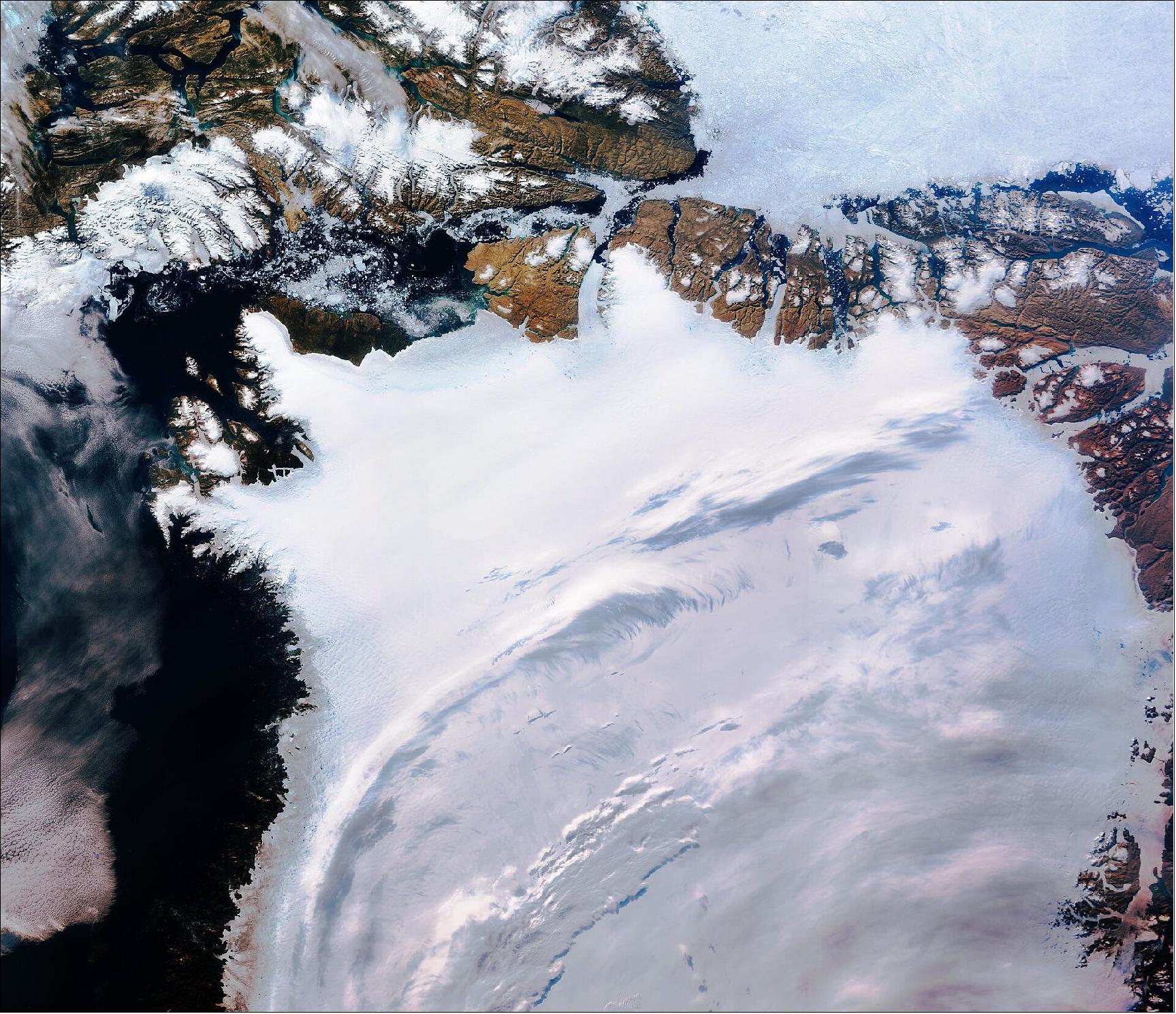
• March 6, 2020: The Copernicus Sentinel-3 mission takes us over part of the Canadian Arctic Archipelago. Most of the archipelago is part of Nunavut – the largest and northernmost territory of Canada. 69)
- The archipelago covers an area of around 1,500,000 km2 and consists of 94 major islands and more than 36,000 minor ones. The archipelago is bound by the Beaufort Sea to the west and by Hudson Bay and the Canadian mainland to the south – largely obscured by clouds in this image.
- The various islands of the Canadian Arctic Archipelago are separated by a series of waterways collectively known as the Northwest Passage. In the past, the Northwest Passage has been impassable owing to its thick, year-round sea ice.
- However, owing to significant changes in the Arctic climate, summer sea ice has decreased substantially and has led to an increasing number of vessels navigating through this once-impossible route.
- According to the National Snow and Ice Data Center (NSIDC), the sea ice extent in July 2019 declined at an average daily rate of 105,700 km2 – exceeding the 1981 to 2010 average rate of 86,800 km2 per day.
- This image (Figure 55) was captured in the days when several wildfires were burning in the Arctic, specifically Siberia. In this image, a wildfire can be seen on mainland Canada, along the Mackenzie River, and smoke plumes are visible blowing westwards.
- Banks Island – the westernmost island of the Arctic Archipelago – is visible in the center of the image. The island has a large population of Arctic foxes, as well as caribou, polar bears and wolves. A number of glacial lakes can be seen in emerald green on the east side of the island.
- Victoria Island lies to the east of Banks Island, and can be identified with its deeply indented coast. With an area of around 200,000 km2, Victoria Island is only slighter smaller than the island of Great Britain.

• January 17, 2020: The Copernicus Sentinel-3 mission takes us over the Japanese archipelago – a string of islands that extends about 3000 km into the western Pacific Ocean. 70)
- While the archipelago is made up of over 6000 islands, this image focuses on Japan's four main islands (Figure 56).
- Honshu’s land mass comprises approximately four-fifths of Japan’s total area. Honshu’s main urban areas of Tokyo, Nagoya, and Osaka are clearly visible in the image. The large grey area in the east of the island, near the coast, is Tokyo, while the smaller areas depicted in grey are the areas around Nagoya and Osaka.
- Honshu is also home to the country’s largest mountain, Mount Fuji. A volcano that has been dormant since it erupted in 1707, Mount Fuji is around 100 km southwest of Tokyo and its snow covered summit can be seen as a small white dot.
- The Sea of Japan, also referred to as the East Sea, (visible to the west of the archipelago) separates the country from the east coast of Asia. The turquoise waters surrounding the island of Hokkaido can be seen at the top of the image, while the waters in the right of the image have a silvery hue because of sunglint – an optical effect caused by the mirror-like reflection of sunlight from the water surface back to the satellite sensor.
- Sentinel-3 is a two-satellite mission to supply the coverage and data delivery needed for Europe’s Copernicus environmental monitoring program. Each satellite’s instrument package includes an optical sensor to monitor changes in the color of Earth’s surfaces. It can be used, for example, to monitor ocean biology and water quality.

• January 9, 2020: Ferocious bushfires have been sweeping across Australia since September, fuelled by record-breaking temperatures, drought and wind. The country has always experienced fires, but this season has been horrific. A staggering 10 million hectares of land have been burned, at least 24 people have been killed and it has been reported that almost half a billion animals have perished. 71)
- Photographs and film footage have without doubt left the world shocked, but the view from space shows the scale of what Australians are having to deal with.
- New South Wales has been worst hit. The Copernicus Sentinel-3 image of Figure 58 shows smoke pouring from numerous fires in the state on 3 January.
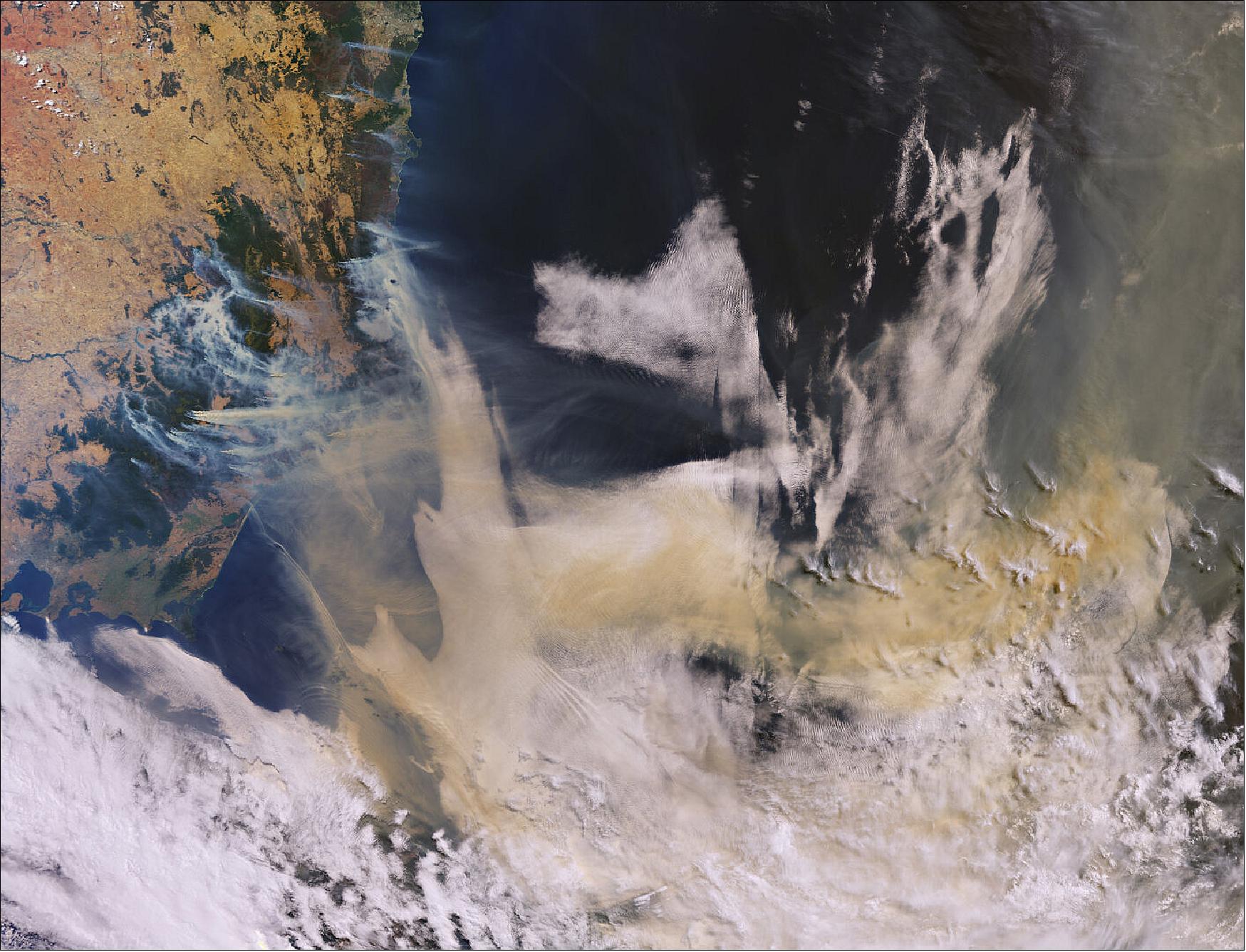
Sensor Complement
Optical Payload, Topographic Payload
In the context of GMES (Global Monitoring for Environment and Security), the objectives of the Sentinel-3 mission, driven by ESA and the user community, encompass the commitment to consistent, long-term collection of remotely sensed data of uniform quality in the areas of sea / land topography and ocean color. Measurements over oceans will be provided jointly with other operational missions, such as the Jason series, to contribute to the realization of a permanent Global Ocean Observing System (GOOS). Regarding ice, it is foreseen to monitor land ice (also denoted as ice sheet) including ice margins and sea ice. At last, measurements over rivers and lakes will help in the water level monitoring of spots of interest throughout the world.
Sentinel-3 will support primarily services related to the marine environment, such as maritime safety services that need ocean surface-wave information, ocean-current forecasting services that need surface-temperature information, and sea-water quality and pollution monitoring services that require advanced ocean color products from both the open ocean and coastal areas. Sentinel-3 will also serve numerous land, atmospheric and cryospheric application areas such as land-use change monitoring, forest cover mapping and fire detection. 72)
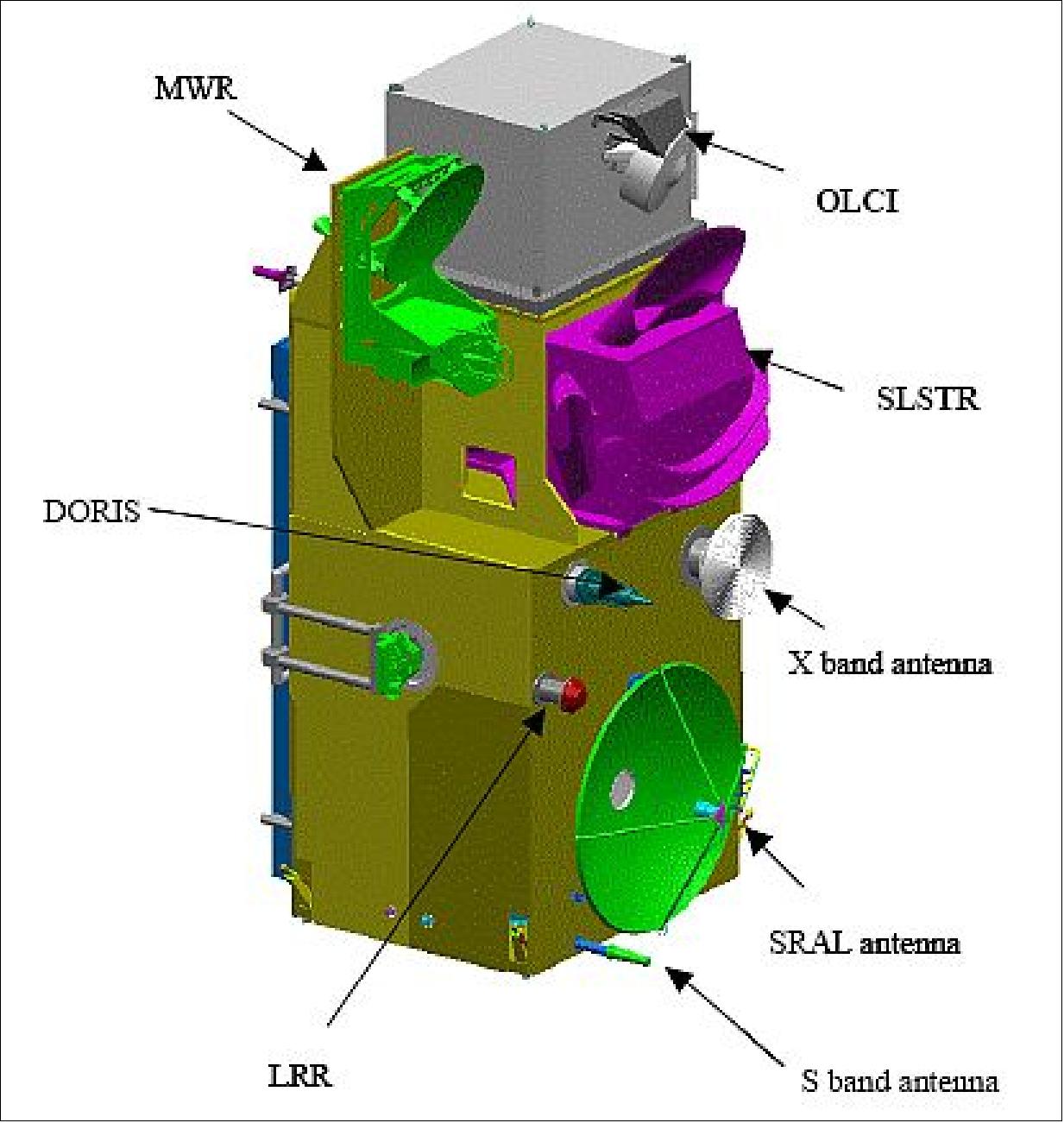
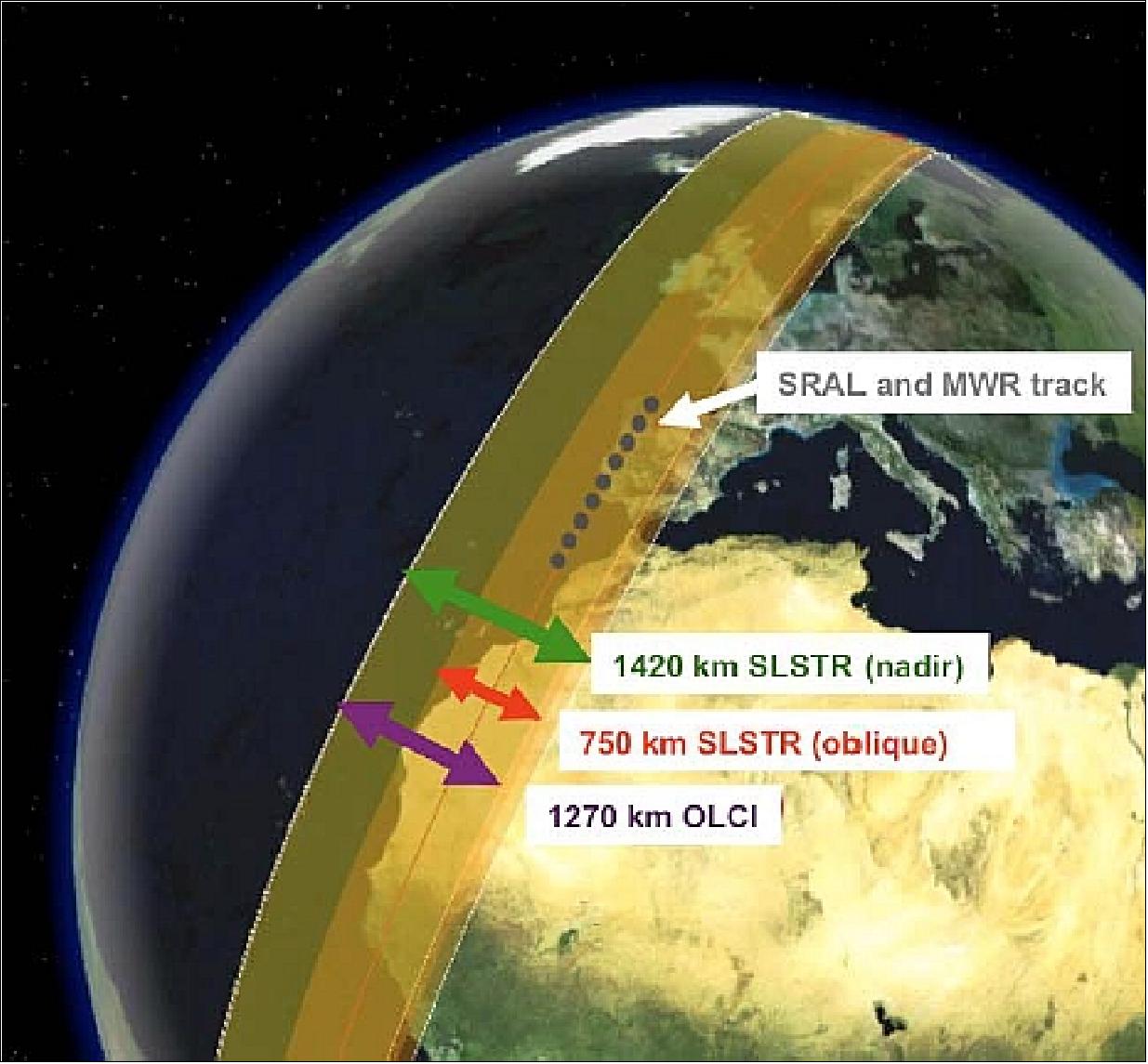
Optical Payload (OLCI, SLSTR)
The optical payload consists of the OLCI and SLSTR instruments. They provide a common quasi-simultaneous view of the Earth to help develop synergistic products. 73) 74) 75)
The primary mission objective of the optical payload is to ensure the continuation of the successful Envisat observations of MERIS for ocean color and land cover and AATSR for sea surface temperature. In addition, due to the overlapping field of view from both optical sensors, new applications will emerge from the combined exploitation of all spectral channels.
OLCI (Ocean and Land Color Instrument)
OLCI is a medium resolution pushbroom imaging spectrometer of MERIS heritage, flown on Envisat, but with a slightly modified observation geometry: the FOV (Field of View) is tilted towards the west (~ 12º away from the sun), minimizing the sun-glint effect over the ocean and offering a wider effective swath (~ 1300 km, overall FOV of 68.6º). The sampling distance is 1.2 km over the open ocean and 0.3 km for coastal zone and land observations. The instrument mass is ~ 150 kg, a size of 1.24 m x 0.83 m x 1.32 m, the power demand is 124 W; it has been designed and developed at Thales Alenia Space España.
The FOV of OLCI is divided between five cameras on a common structure with the calibration assembly. Each camera has an optical grating to provide the minimum baseline of 16 spectral bands required by the mission together with the potential for optional bands for improved atmospheric corrections.
The OLCI bands are optimized to measure ocean color over open ocean and coastal zones. A new channel at 1.02 µm has been included to improve atmospheric and aerosol correction capabilities. Two additional channels in the O2A absorption line (764.4 and 767.5 nm, in addition to the existing channel at 761.25 nm) are included for improved cloud top pressure (height) with an additional channel at 940 nm in the H2O absorption region, to improve water vapor retrieval. A channel at 673 nm has been added for improved chlorophyll fluorescence measurement.
Band No | λ center | Bandwidth | Lmin | Lref | Lsat | SNR@Lref |
Oa1 | 400 | 10 | 21.60 | 62.95 | 413.5 | 2188 |
Oa2 | 412.5 | 10 | 25.93 | 74.14 | 501.3 | 2061 |
Oa3 | 442.5 | 10 | 23.96 | 65.61 | 466.1 | 1811 |
Oa4 | 490 | 10 | 19.78 | 51.21 | 483.3 | 1541 |
Oa5 | 510 | 10 | 17.45 | 44.39 | 449.6 | 1488 |
Oa6 | 560 | 10 | 12.73 | 31.49 | 524.5 | 1280 |
Oa7 | 620 | 10 | 8.86 | 21.14 | 397.9 | 997 |
Oa8 | 665 | 10 | 7.12 | 16.38 | 364.9 | 883 |
Oa9 | 673.75 | 7.5 | 6.87 | 15.70 | 443.1 | 707 |
Oa10 | 681.25 | 7.5 | 6.65 | 15.11 | 350.3 | 745 |
Oa11 | 708.25 | 10 | 5.66 | 12.73 | 332.4 | 785 |
Oa12 | 753.75 | 7.5 | 4.70 | 10.33 | 377.7 | 605 |
Oa13 | 761.25 | 2.5 | 2.53 | 6.09 | 369.5 | 232 |
Oa14 | 764.375 | 3.75 | 3.00 | 7.13 | 373.4 | 305 |
Oa15 | 767.5 | 2.5 | 3.27 | 7.58 | 250.0 | 330 |
Oa16 | 778.75 | 15 | 4.22 | 9.18 | 277.5 | 812 |
Oa17 | 865 | 20 | 2.88 | 6.17 | 229.5 | 666 |
Oa18 | 885 | 10 | 2.80 | 6.00 | 281.0 | 395 |
Oa19 | 900 | 10 | 2.05 | 4.73 | 237.6 | 308 |
Oa20 | 940 | 20 | 0.94 | 2.39 | 171.7 | 203 |
Oa21 | 1020 | 40 | 1.81 | 3.86 | 163.7 | 151 |
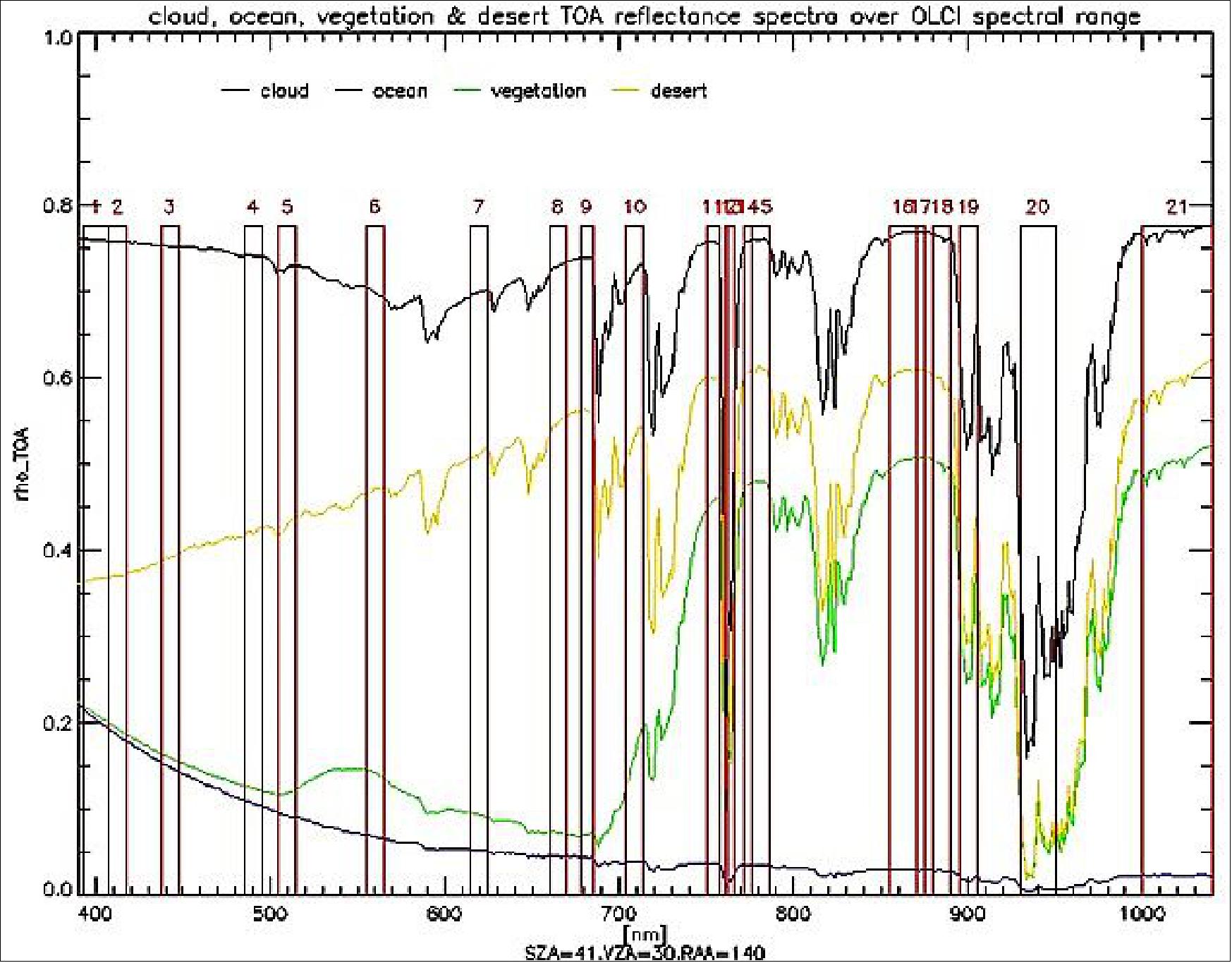
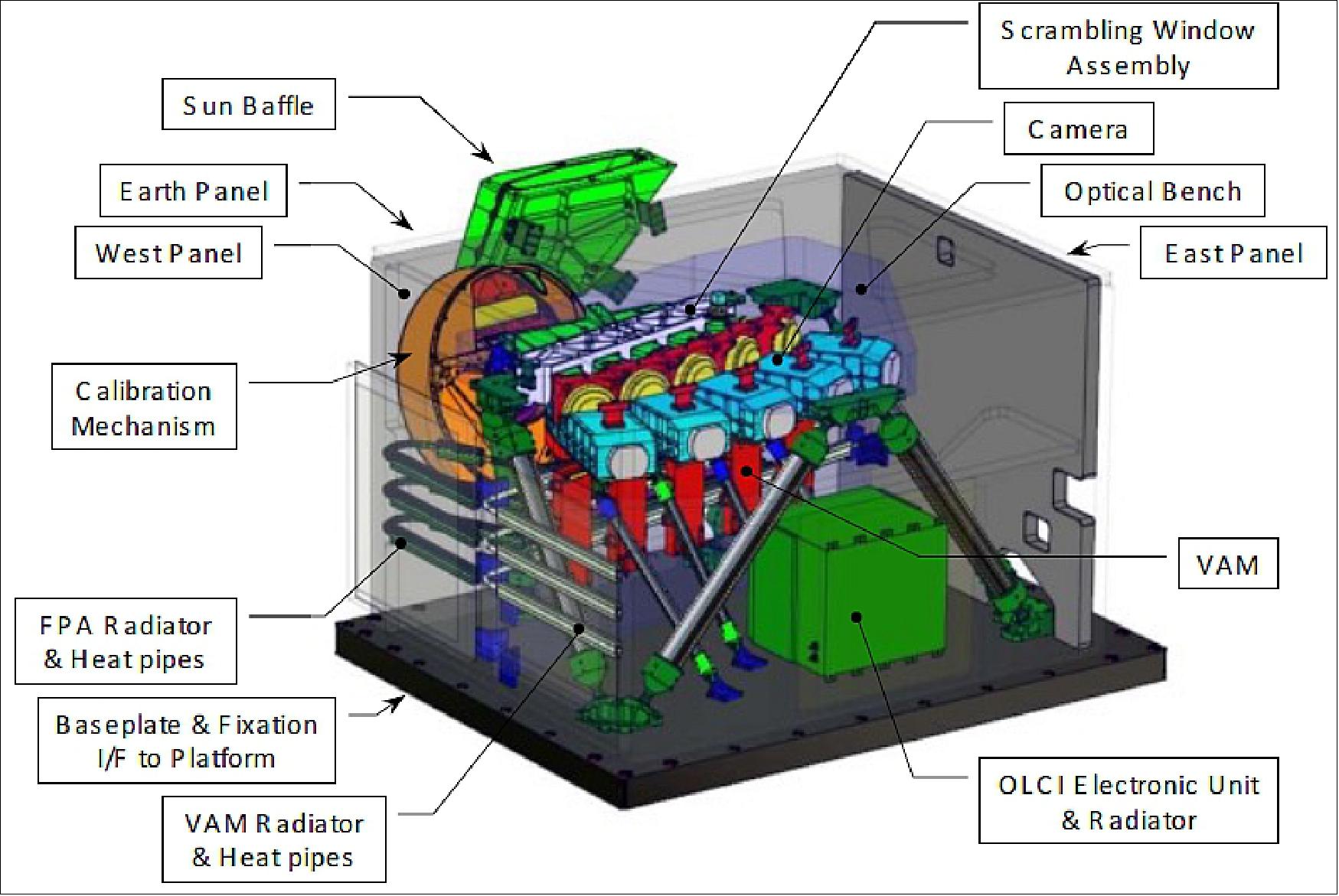
Each camera is constituted of a Scrambling Window Element to comply with the polarization requirement, a COS (Camera Optical Sub-assembly) for the spectral splitting of the different wavelengths, a FPA (Focal Plane Assembly) with a CCD for the signal detection and a VAM (Video Acquisition Module) for the monitoring of the analog signal. The optical sub-assembly of each camera includes its own grating and provides the 21 spectral bands required by the mission in the range 0.4-1.0 µm. 77)
The control of the instrument assembly is realized by a CEU (Common Electronic Unit), which assumes the function of instrument control, power distribution and digital processing.
A calibration assembly, including a rotation wheel with five different functions for normal viewing, dark current, spectral and radiometric calibrations insures the calibration of the instrument. The calibration wheel has 5 positions: 78)
• The Earth Observation aperture
• The Shutter, blocking incoming light it allows dark offset acquisition (and gives the calibration zero)
• The nominal radiometric diffuser, from which calibration gains are derived
• The reference radiometric diffuser, dedicated to the monitoring of the nominal diffuser ageing
• The spectral diffuser allowing spectral calibration at 3 wavelengths.
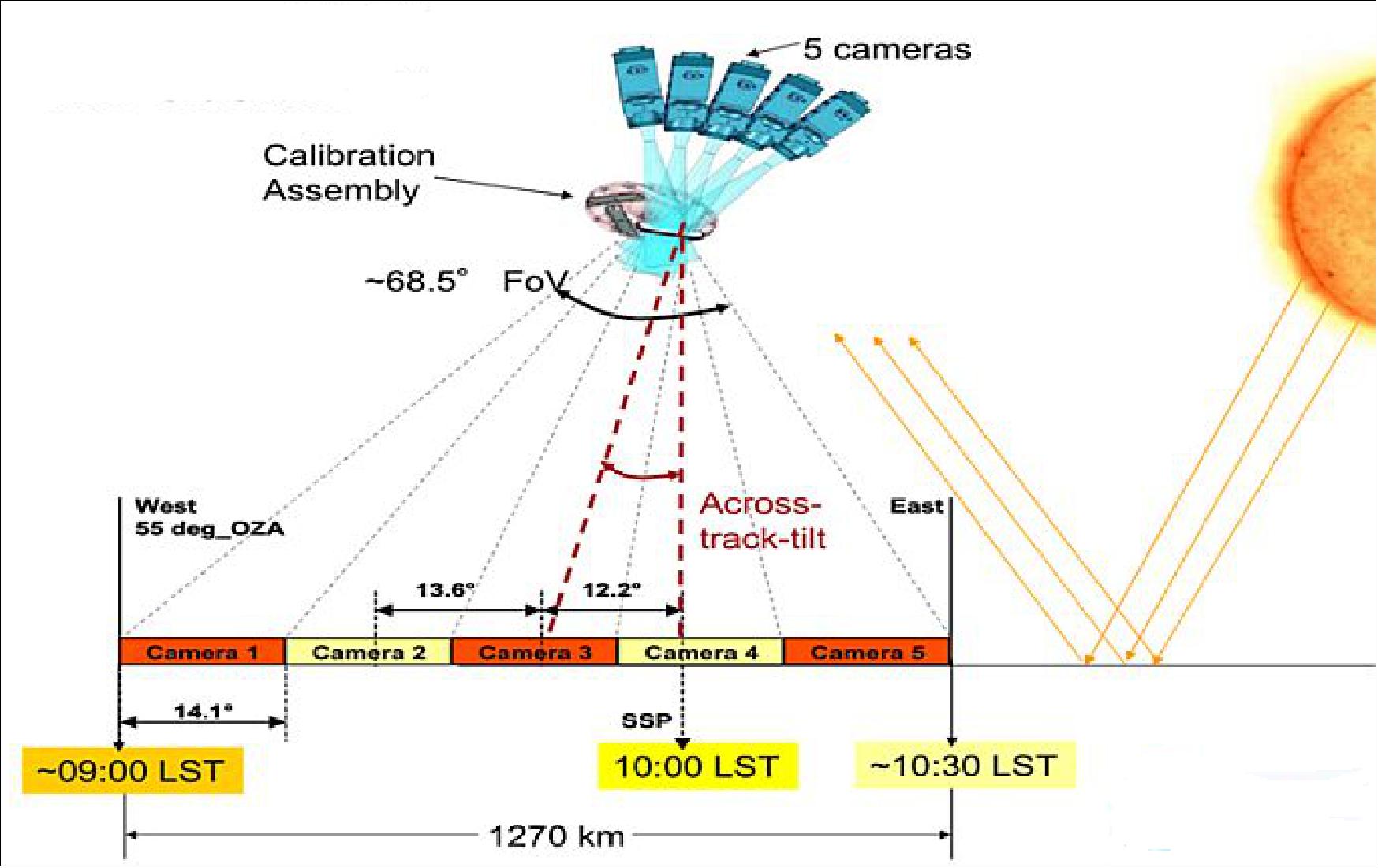
Compared to ENVISAT, the following improvements have been implemented:
• Along-track SAR capability for coastal zones, inland water and sea-ice altimetry
• Off-nadir tilted field of view for OLCI cameras to minimize sun-glint contamination (i.e. loss of ocean color data)
• New spectral channels in OLCI and SLSTR allowing improved retrieval of geophysical products and detection of active fire
• Synergy products (e.g. vegetation) based on combination of OLCI and SLSTR data (OLCI swath fully covered by SLSTR swath).
In each camera unit, Earth light enters a calibration assembly which includes filters as well as spectral calibration sources which are PTFE (Polytetrafluorethylen, also known as Teflon) sun diffusers to track spectral calibration, gain calibration and instrument aging effects. Next, light passes through the scrambling window assembly featuring a scrambling window and an inverse filter.
The camera optics subassembly houses all optics needed for the separation of spectral bands and focusing the light onto the detector. After passing through the ground imager optics, the light is dispersed by a diffraction grating and passed onto the CCD detector system building the centerpiece of the focal plane assembly.
The spectrometer generates a dispersed image of the entrance slit onto a two-dimensional detector where one dimension is the spatial extension of the slit and the other is the spectral dispersion of the slit image created by the grating.
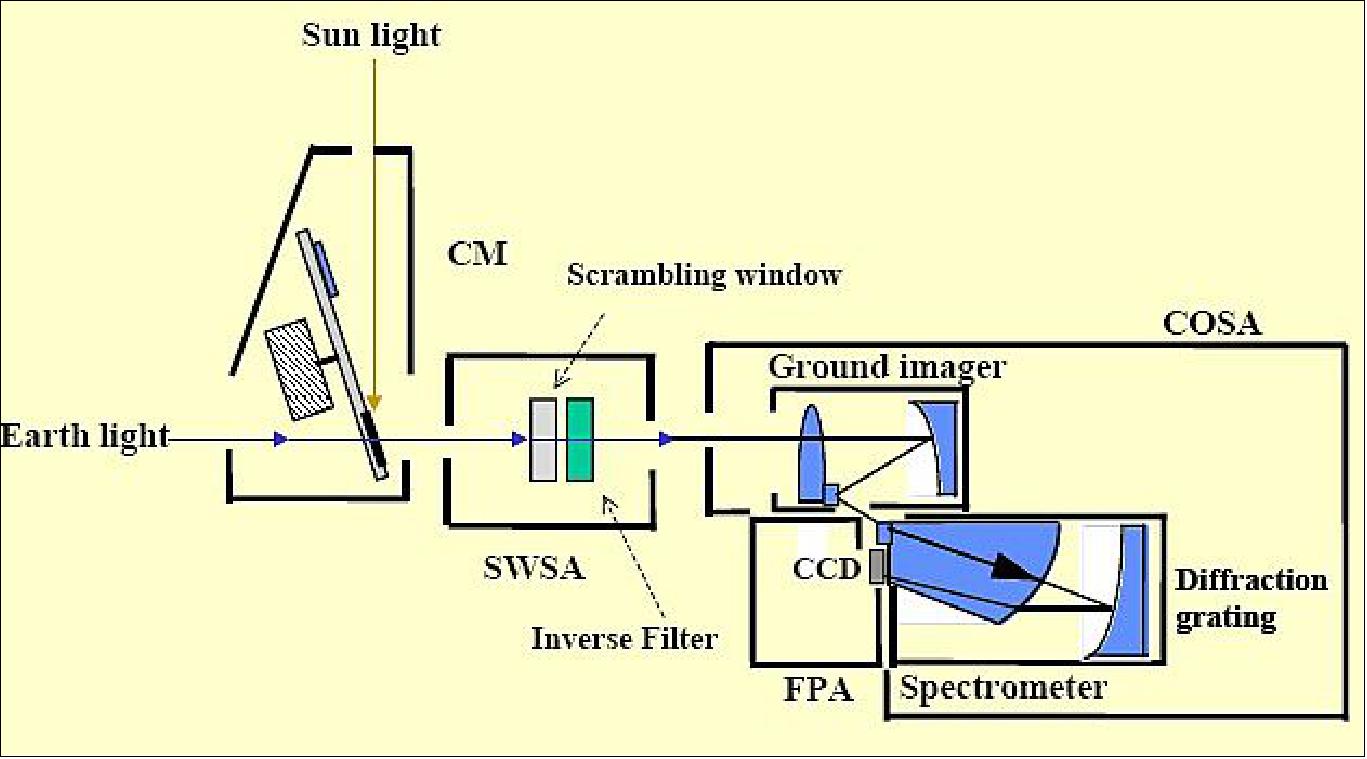

Swath | ~1270 km |
Spatial resolution | 300 m @ SSP (Sub-Satellite Point) |
Calibration | MERIS type calibration arrangement with spectral calibration using a doped Erbium diffuser plate, radiometric calibration using PTFE diffuser plate and dark current plate viewed approximately every 2 weeks at the South Pole ecliptic. A second diffuser plate viewed periodically for calibration degradation monitoring. |
Detectors | ENVISAT MERIS heritage back-illuminated CCD55-20 frame-transfer imaging device (780 column by 576 row array of 22.5 µm square active elements). |
Optical scanning design | Pushbroom imaging spectrometer. 5 cameras recurrent from MERIS with dedicated SWA (Scrambling Widow Assembly) and supporting by 5 VAMs (Video Acquisition Modules) for analog to digital conversion. |
Spectral resolution | 1.25 nm (sampling interval), 21 bands (nominal Earth View), 45 bands (spectral campaigns) |
Radiometric accuracy | <2% with reference to the sun (0.1% stability for radiometric accuracy over each orbit and 0.5% relative accuracy for the calibration diffuser BRDF) |
Mass, size | 150 kg, 1.3 m3 |
SLSTR (Sea and Land Surface Temperature Radiometer)
SLSTR is an upgraded and advanced version of the AATSR instrument on Envisat, offering a wider swath which completely overlaps the OLCI swath, as required to produce accurate vegetation products. The SLSTR is designed for ocean and land-surface temperature observations. Unlike AATSR, SLSTR has a double-scanning mechanism, yielding a much wider swath stretching almost from horizon to horizon. The OLCI and SLSTR swaths are overlapping broadly, yielding extra information. SLSTR has a wide nadir view and a narrow oblique view. 79) 80) 81)
Selex Galileo of Finmeccanica signed a contract with Thales Alenia Space, to supply the SLSTR instrument. Overall, the SLSTR team involves some 20 European companies or institutions, referred to as “SLSTR consortium” (among them RAL (Rutherford Appleton Laboratory), Jena-Optronik, TAS-F, ABSL, ESA/ESTEC), for the development of this rather complex payload.
The instrument design follows the dual view concept of the ATSR series with some notable improvements. An increased swath width in both nadir and oblique views (1400 and 740 km) provides measurements at global coverage of Sea and Land Surface Temperature (SST/LST) with daily revisit times, which is useful for climate and meteorology (1 km spatial resolution).
Improved day-time cloud screening and other atmospheric products will be possible from the increased spatial resolution (0.5 km) of the VIS and SWIR channels and additional SWIR channels at 1.375 µm and at 2.25 µm. Two additional channels using dedicated detector and electronics elements are also included for high temperature events monitoring (1 km spatial resolution).
The two Earth viewing swaths are generated using two telescopes and scan mirrors that are optically combined by means of a switching mirror at the entrance of a common FPA (Focal Plane Assembly). The eleven spectral channels (3 VIS, 3 SWIR, 2 MWIR, 3 TIR) are split within the FPA using a series of dichroics. The SWIR, MWIR and TIR optics/detectors are cooled down to 80 K with an active cryocooler, while the VIS detectors work at a stabilized uncooled temperature.
The SST and LST data generated from SLSTR observations are intended to ensure continuity of the data sets started in 1991 by the ATSR series. The plan is for the Sentinel 3 Mission to operate with two satellites operating concurrently for 20 years when fully implemented, although initially a single SLSTR will provide equivalent or a better performance (Table 6) when compared to its predecessors in the following ways:
- Increase of the dual view swath width from 500 to 744 km centered on the subsatellite track (Figure 66) gives a mean global coverage revisit time at the equator of 1.9 days (1 spacecraft) or 0.9 days (2 spacecraft)
- Enlarged single view swath width of 1400 km provides a mean global coverage revisit time at the equator of 1 day (1 spacecraft) or half a day (2 spacecraft)
- A nadir on-ground resolution of 0.5 km at nadir (instead of 1 km) for all VIS (S1-S3) and SWIR (S4-S6) channels. Radiance measurements from these channels are used for both land & clouds daytime observations
- Two added channels in the SWIR band to allow improved cloud and aerosol detection to give more accurate SST/LST retrievals
- Two dedicated channels for fire and high temperature events monitoring at 1 km resolution
- A mission design lifetime of 7.5 years which is higher compared to the earlier instruments.
High SNR (600) for the VIS channels at Earth albedo signals (30%) and low NEDT (< 30 mK) for the TIR channels is achieved via the use of a very efficient detector technology (TIA Si for VIS at 260 K, PV-CTIA for SWIR, and PC for TIR at 80 K). The polarization sensitivity is less than 5% EOL (2% BOL) thanks to the use of high reflecting/transparent optical coatings within the channel passbands.
Parameter | Configuration/spectral range | SLSTR | AATSR |
Swath Width | Nadir view | 1400 km | 500 km |
Revisit time, global coverage | 1 S/C (dual) | 1.9 days | 7-14 days |
SSI (Spatial Sampling Interval) | VIS-SWIR | 0.5 km | 1 km |
No of spectral bands | VIS | 3 | 3 |
Spectral band | λ (µm) | Δλ (µm) | Albedo range (%) | Albedo Ref. (%) | SNR Ref. |
S1 | 0.555 | 0.020 | 0-100 | 0.5-30 | 25-570 |
S2 | 0.659 | 0.020 | 0-100 | 0.5-30 | 25-570 |
S3 | 0.865 | 0.020 | 0-100 | 0.5-30 | 21-630 |
S4 | 1.375 | 0.015 | 0-100 | 0.5-5 | 25-162 |
S5 | 1.610 | 0.060 | 0-100 | 0.5-50 | 37-900 |
S6 | 2.250 | 0.050 | 0-100 | 0.5-4 | 27-142 |
|
|
|
|
|
|
Spectral band | λ (µm) | Δλ (µm) | T range (K) | T Ref. (K) | NEΔT Ref. (mK) |
S7 | 3.74 | 0.38 | 200-323 | 270 | 56 |
S8 | 10.85 | 0.9 | 200-321 | 270 | 29 |
S9 | 12 | 1.0 | 200-318 | 270 | 21 |
F1 (Fire) | 3.74 | 0.38 | 290-500 | 285-500 | 680-16 |
F2 (Fire) | 10.85 | 0.9 | 290-400 | 230-400 | 79-35 |
Legend to Table 6: λ = center wavelength, Δλ = spectral width, Albedo Ref (Top of Atmosphere Reflectance), T (Top Of Atmosphere Brightness Temperature), SNR (Signal-To-Noise Ratio), NEΔT (Noise Equivalent Temperature Difference).
In the SLSTR viewing geometry, two SLSTR dedicated telescopes and scan mirrors generate the Earth view swaths (Figure 66) as portions of two conical CCW (Counter-Clock-Wise) scans; in between these observation views, SLSTR acquires calibration data with the BBs (Black Bodies) and the VISCAL (Visible Calibration unit).
Swath | Nadir view 1400 km, Dual view 740 km |
Spatial resolution | VNIR/SWIR channels: 0.5 km |
Calibration | Two on-board calibration reference BBs (Black Bodies) and one VISCAL (Visible Calibration) unit viewed respectively every 0.3 sec scan time (BBs) and once per orbit at the South Pole ecliptic (VISCAL). |
Detectors | VIS: Silicon diode operational Temperature Top ~ 265 K |
Optical scanning | Along-track scanning based on two earth view scanning mirrors viewing two scan lines per revolution led via one recombination mirror and cooled focusing optics to the detector array (field stop on the detector elements) |
Radiometric | SNR (R/NeDR): >300 EOL in VIS at 30% reflectance & 0.5 km, |
Radiometric accuracy | VIS-SWIR (albedo = 2–100%): < 2% (BOL) < 5% (EOL) |
Mass, size | 150 kg, 2.1 m3 |
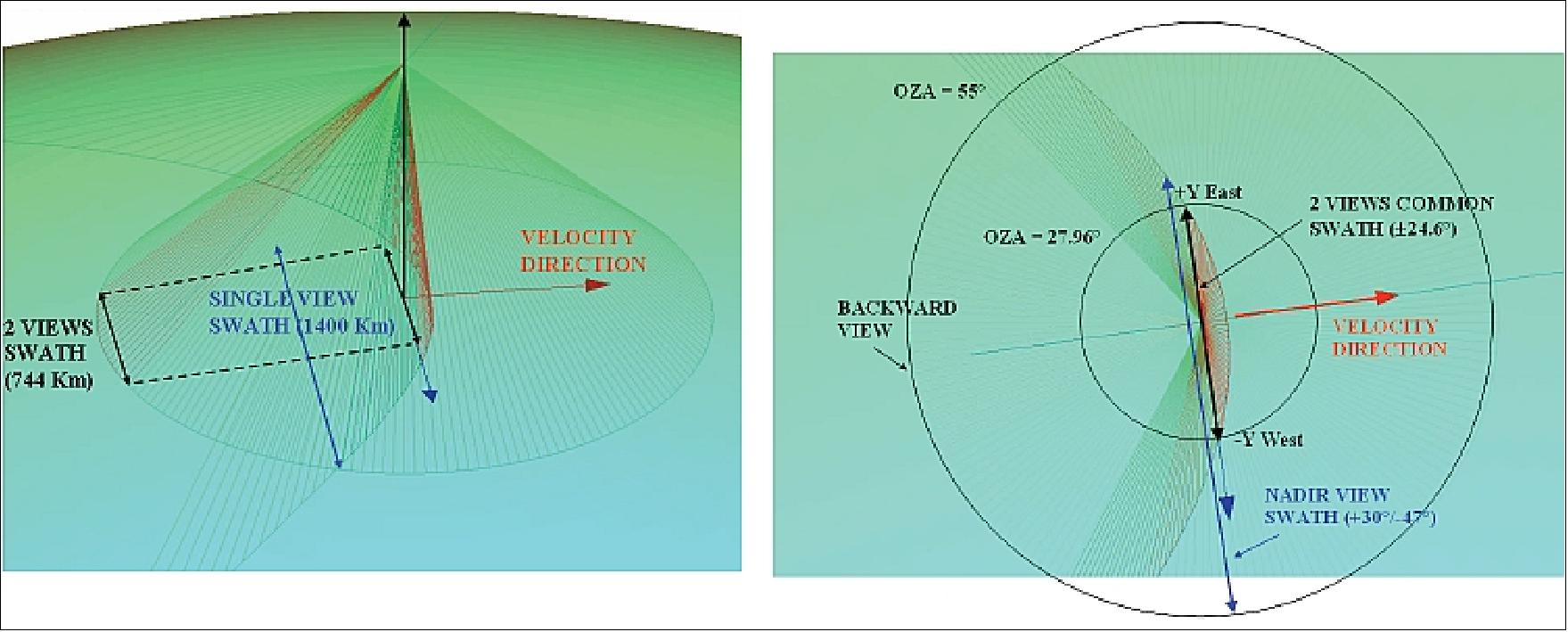
The SST/LST measurement accuracy is obtained by means of a high accurate calibration of the three infrared channels (S7-S8-S9), which are used for the correction of the water vapor atmospheric absorption (split window during day and triple window during night), and the observation of the same on-ground pixel by means of two atmospheric path views for the correction of aerosols effects (Figure 67).
Two different synchronized conical scanners are used to optimize the IR radiometric accuracy, allowing constant optical area beam and incidence angle (23.5º) for all scan points (both scene and BBs), low polarization effects and frequent views of BBs (every scan) with the same Earth observation geometry.
The conical scan, inherited from AATSR (Advanced Along Track Scanning Radiometer), is of fundamental importance for TIR (Thermal Infrared) radiometric accuracy as each scanner uses a constant optical area at a fixed angle. Optimizing incidence angles and reflectivities provides low polarization. Both scans are performed by means of a mirror inclined at θ=23.5º with respect to the rotation axis with an half cone angle of β=47º: the inclined view rotation axis is pointed to nadir direction while the near-nadir view rotation axis is backward inclined of γ=41º (Figure 67).
All on-ground pixels are viewed with an OZA (Observation Zenith Angle) less than 55º, so limiting the radiance variations with sea emissivity changes due to salinity, temperature and wind speed and permitting emissivity modelling only as a function of OZA.
A path length ratio between the two views of 1.54 is achieved for a good optimization of the SST retrieval algorithm. Two detector pixels (IR channels) simultaneously view 2 km along-track in nadir view, to ensure adequate signal integration and also reducing the scan speed with respect to previous AATSR thereby allowing heritage qualifications for the scanners’ bearing operational lifetime requirement of 7.5 years.
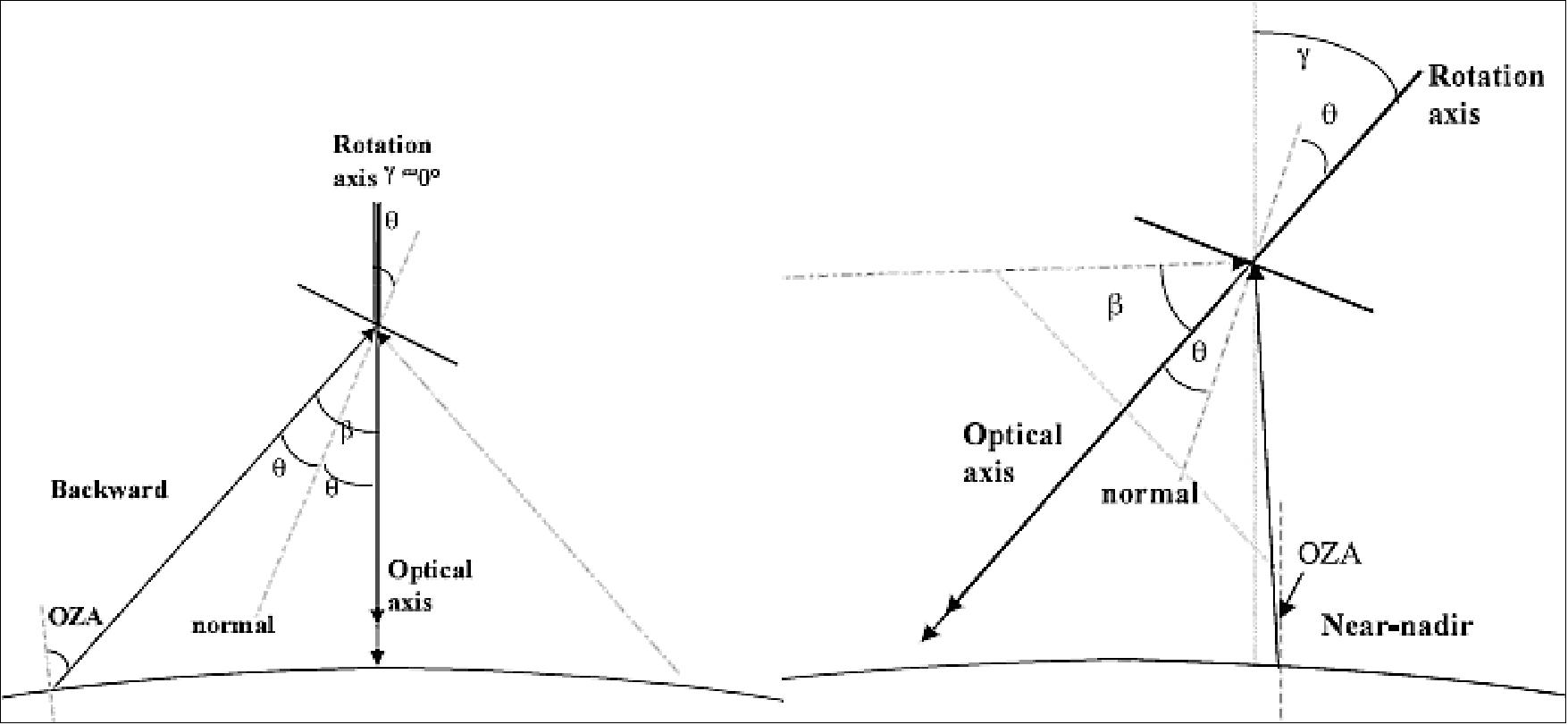
The SLSTR instrument comprises two physical units, that are integrated separately to the platform:
- SLOSU (SLSTR Optical Scanning Unit), simply referred to as OSU, is mainly composed by OME (Opto-Mechanical Enclosure) together with thermal radiators, FEE (Front End Electronics), the cooling system, and DA (Detection Assembly)
- SLCPE (SLSTR Control and Processor Electronics), simply called CPE, controls all subsystems and manages the data interface with the satellite.
The SLSTR functional block diagram and an instrument view are shown in Figure 68 and Figure 69, respectively.
For each view, IR and VIS radiant energy is reflected by a scan mirror mounted on a scan mechanism towards a paraboloid mirror. The energy is then focused and reflected into a common FPA, with a flip mirror mechanism switching from one view to the other. A fast switching flip-mirror alternates the optical beams from the two scanners so that they superimpose at prime focus and acquire signals from both Earth views (nadir and oblique) and the on-board calibrators (BBs and VISCAL). To increase lifetime, each scanner has a period of 300 ms, a factor of two slower than its predecessor AATSR.
This technology is housed in the OME, which mounts the two telescopes, the flip mirrors, the calibrator units (BBs and VCU), and the SUE (Scan Unit Electronics). The OME feeds the optical beams into the FPA (Focal Plane Assembly) which spectrally separates eleven channels (3 VIS, 3 SWIR, 2 MIR, 3 TIR) with dichroics. There are nine DUs (Detector Units), each one is equipped with a precision filter to define its spectral response. The IR channels’ optics/detectors are cooled to 80 K by an active cryocooler that has vibration compensation. The separated housed visible channels need to be run at a stable ambient temperature.
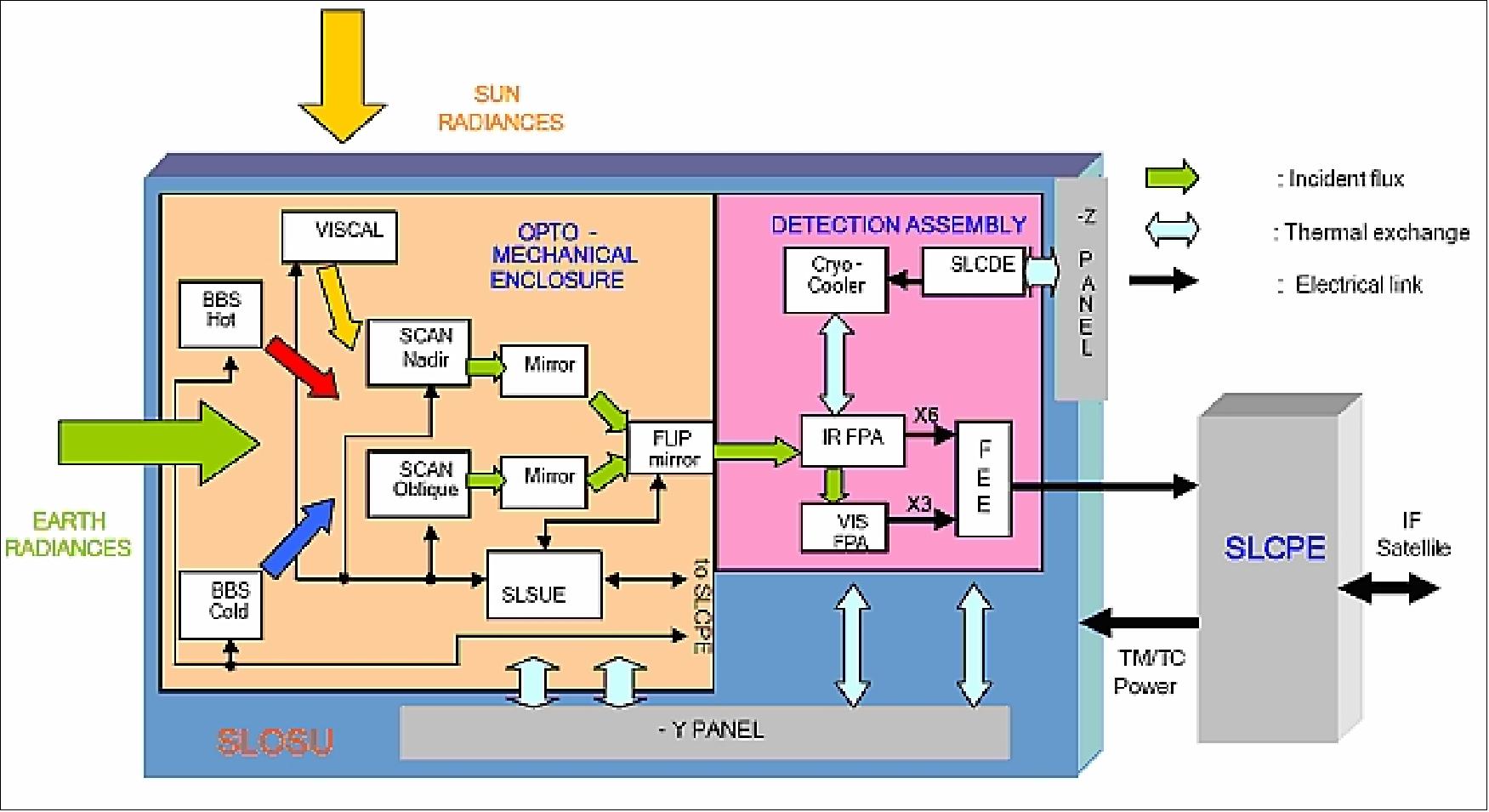
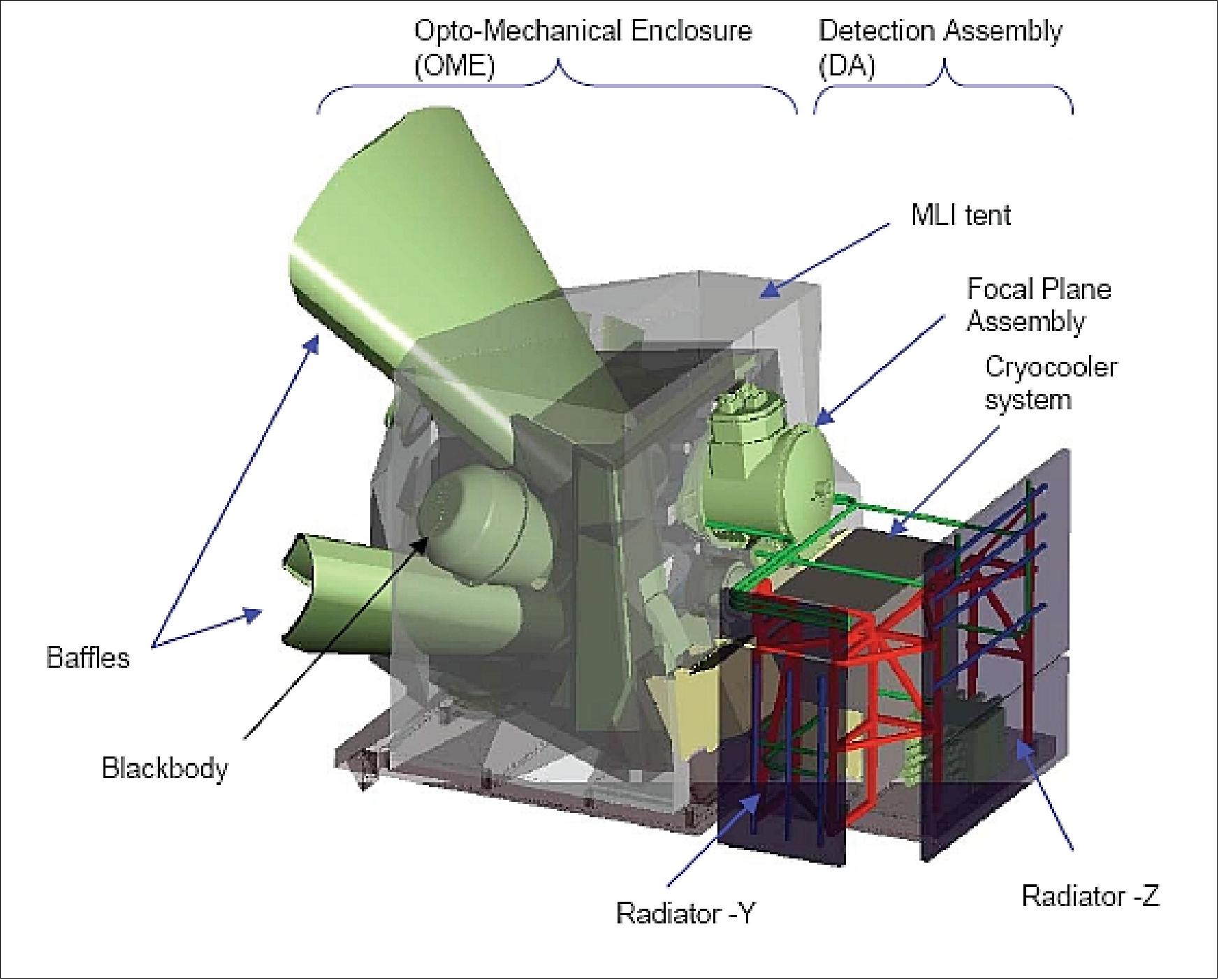
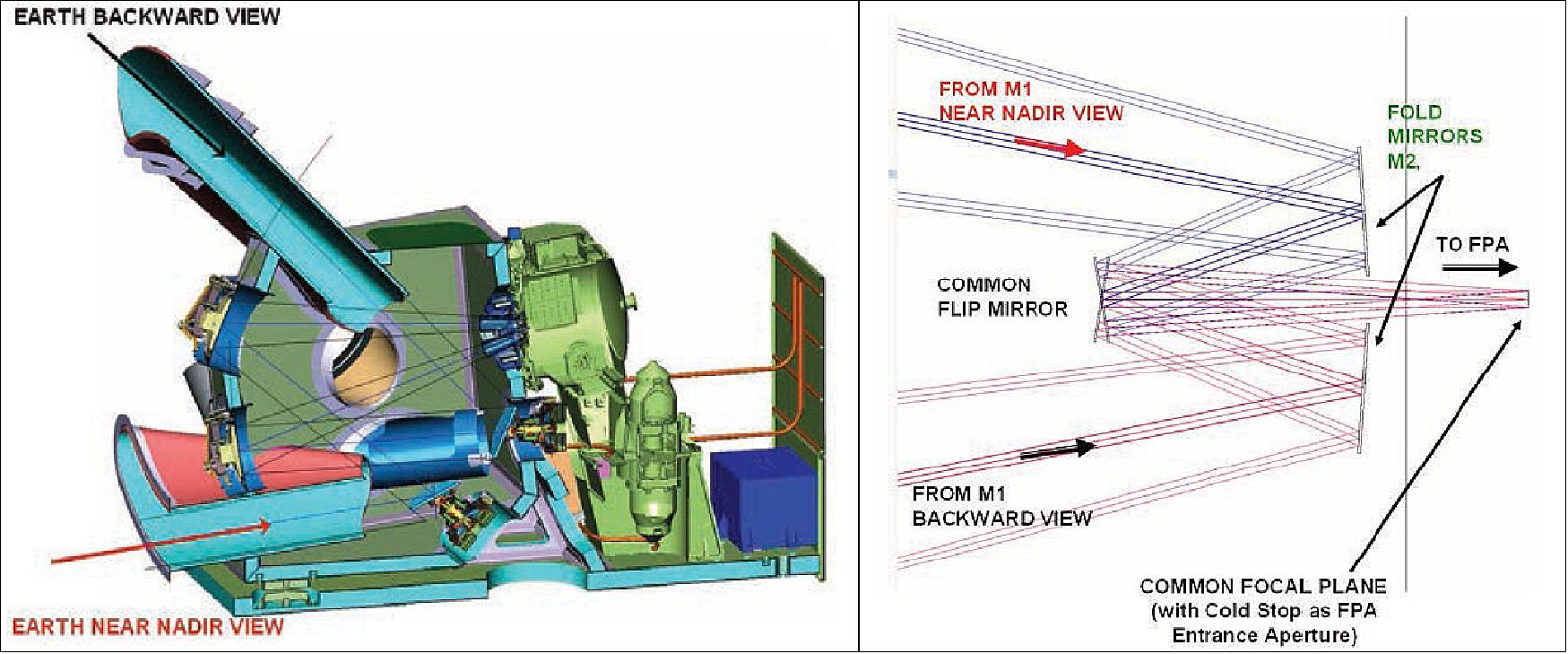
OSU (Optical Scanning Unit) Technologies
1) General design considerations for the OME (Opto-Mechanical Enclosure): Two conical scanners provide the two swaths by using rotating mirrors inclined at 23.5º with respect to its rotation axis. The oblique swath (740 km) is obtained with the scanner rotation axis pointed versus nadir, while for the near nadir one (1400 km), the scanner rotation axis is inclined backward at 41º. In this way, the same on ground swath of 740 km can be observed with two observation zenith angles (< 55º) with a minimum atmospheric path length ratio of 1.54 (Figure 71).
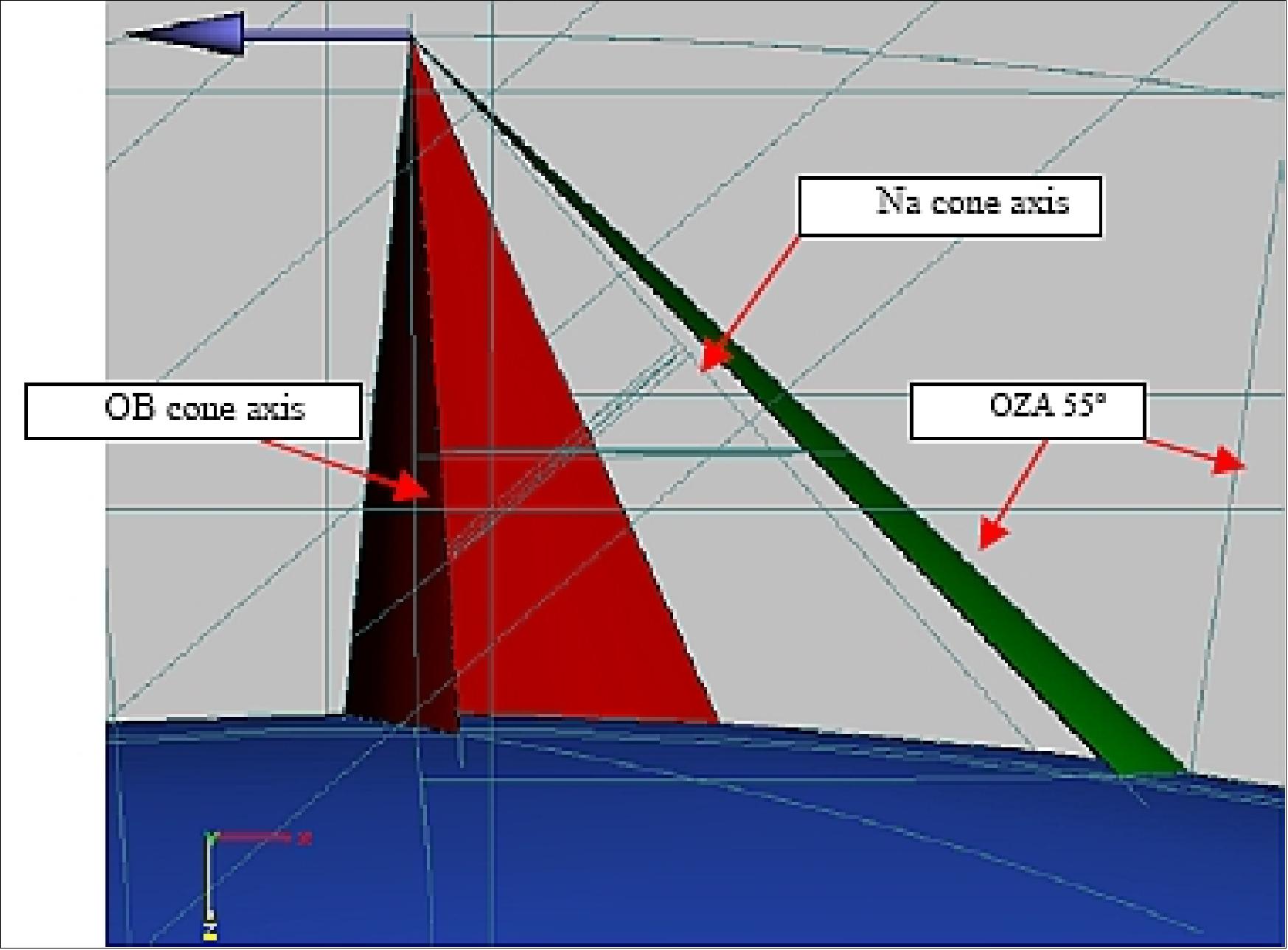
The OME layout for the scanners has been carefully optimized. Placing the two blackbodies (one hot at ~300 K, and another cold at ~265 K) in front of all other optical elements at the intersections of the two scanned cones (Figure 73 and Figure 74) affords both scanners frequent, continuous and consistent IR in-flight calibration.
The radiation from the earth or calibration targets is reflected via the two scanners and focused into a common focal plane. This plane at the telescope prime focus is an intermediate focus in the system since the FPA re-images it on to the detectors. The two reflective telescopes are realized with single off-axis paraboloid mirrors and use folding mirrors to feed a small, fast and precise FMD (Flip Mirror Device) as shown in Figure 72).
The FMD steps a highly reflective 13 mm diameter mirror about an attrition-free rotation axis, driven by a limited angle torque motor and a limited angular range optical encoder. Optical design optimization has permitted the tilt angle to be limited to < ±9.5º, so the SLSTR achieves the required flex-pivot lifetime. The FMD has a steady state angular stability accuracy of 10-15 arcsec.
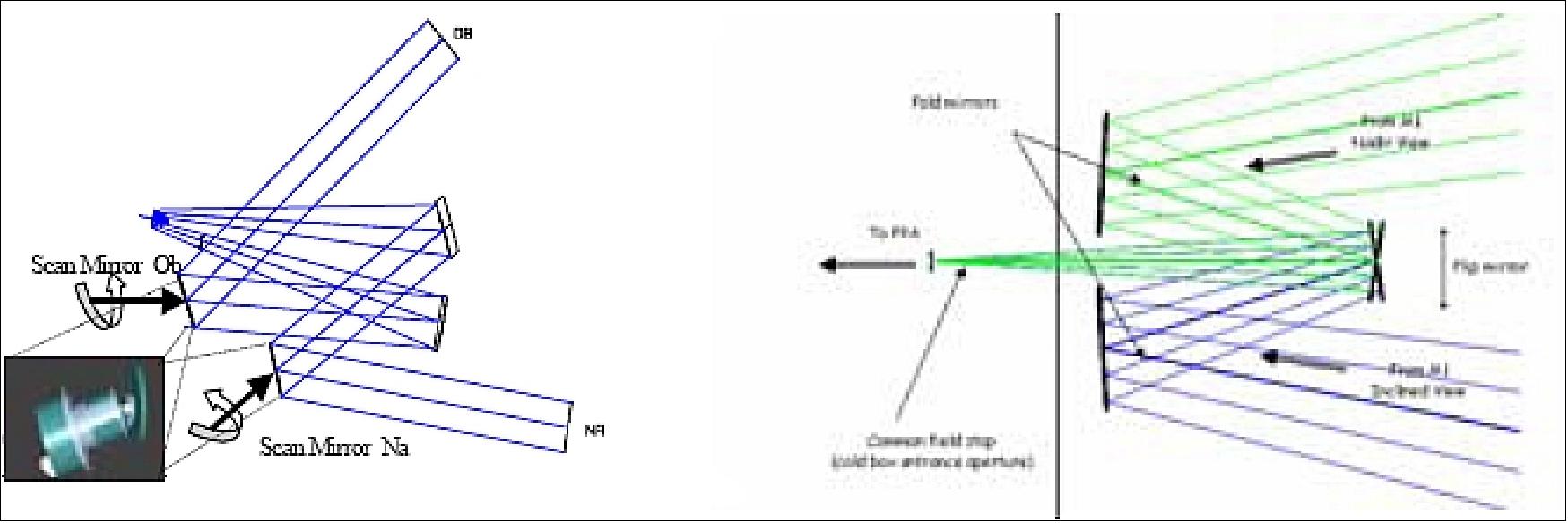
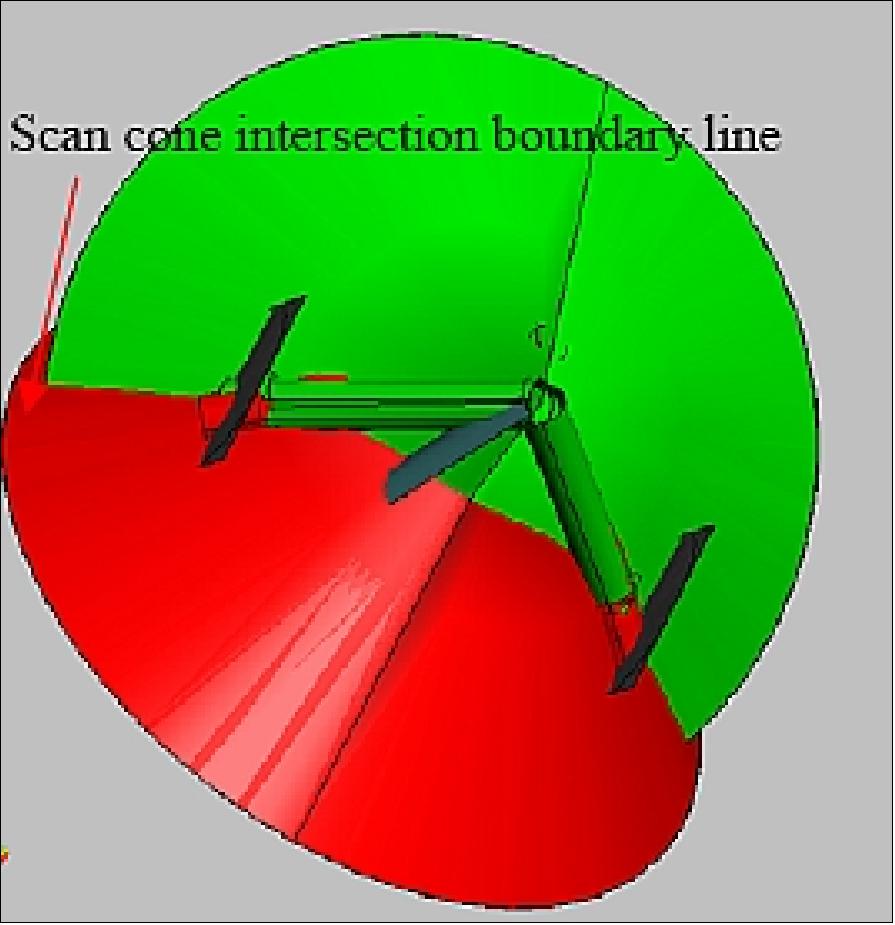
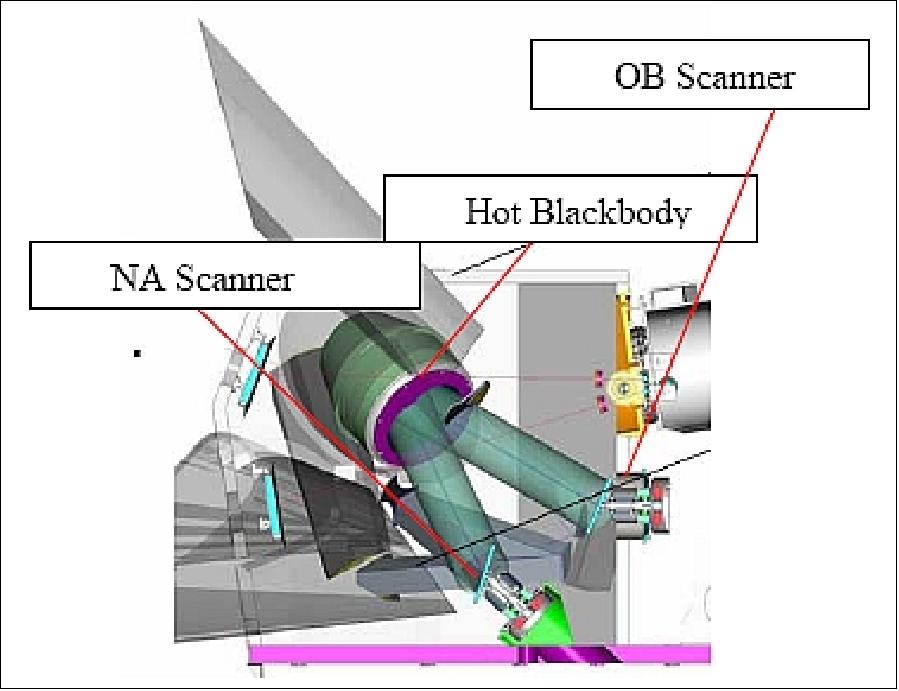
SLSTR has a VISCAL (Visible Calibration unit) which is illuminated by the sun for ~1 minute each orbit. Besides the IR blackbodies already mentioned, the OME relays photons from the VISCAL via both scanners. The optical beams have been geometrically accommodated, but viewing them also has to be integrated in the timing duty cycle of the scanners. An optimized FMD switching time of 34 ms has been chosen, combining a minimized stepping angle with this minimizes drive thermal dissipation.
What the 34 ms does, means that calibration sources will be observed via both views only every two scans or 600 ms rather than every scan. A timing diagram for is shown in Figure 75, where the upper (magenta) and lower (blue) lines represent the oblique and nadir view scanner observations, while the middle brown line represents the position of the flip mirror and its transitions between the two views.
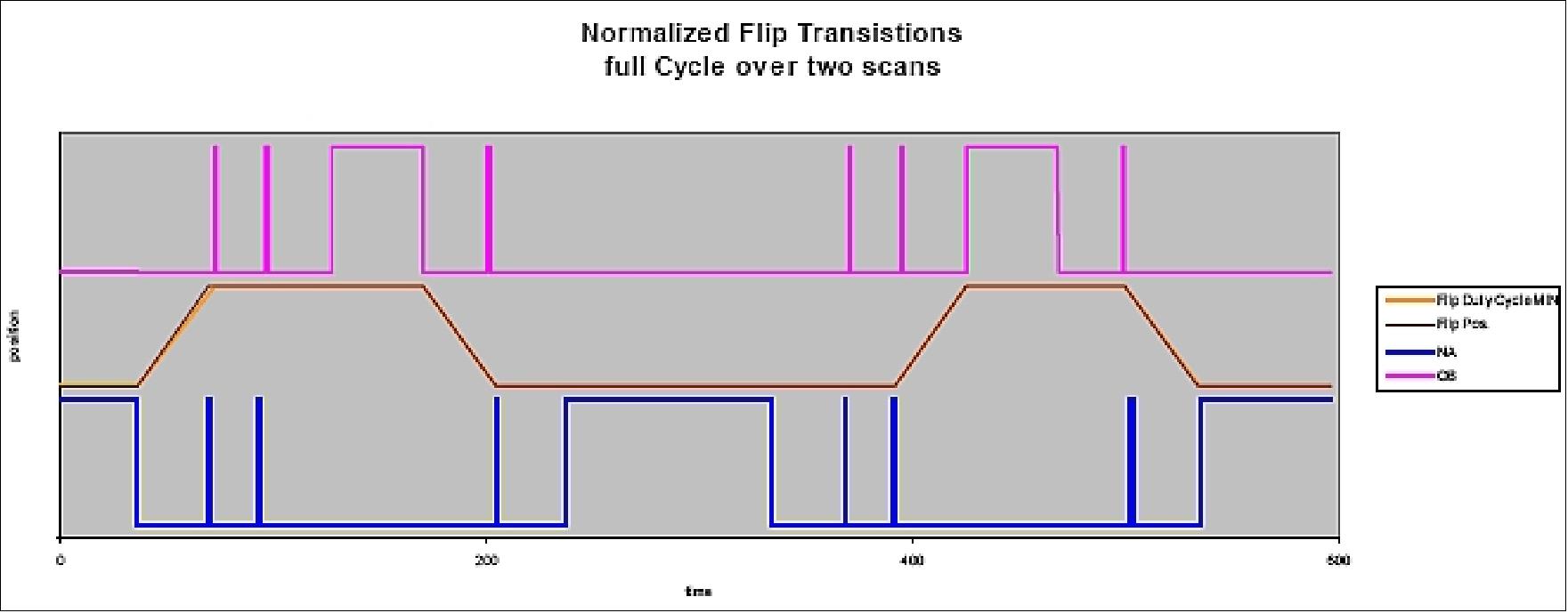
2) Switching device FMD (Flip Mirror Device): The FMD (Figure 76) has been implemented by using components with limited development cycles:
- A conventional glass based flat mirror with 13 mm free aperture
- Attrition free axis bearing implemented by means of flexural pivots with infinite life time for max excursion angle of 15º and a powerless 0º position
- A limited angular range high resolution (19 bit) and accurate (< 15 arcsec) optical encoder
- An efficient LAT motor,
- A transition time between both operation positions separated by 19 of 34 ms
- 4 x switching operations per 600 ms
- More than 2 billion operations life-time.
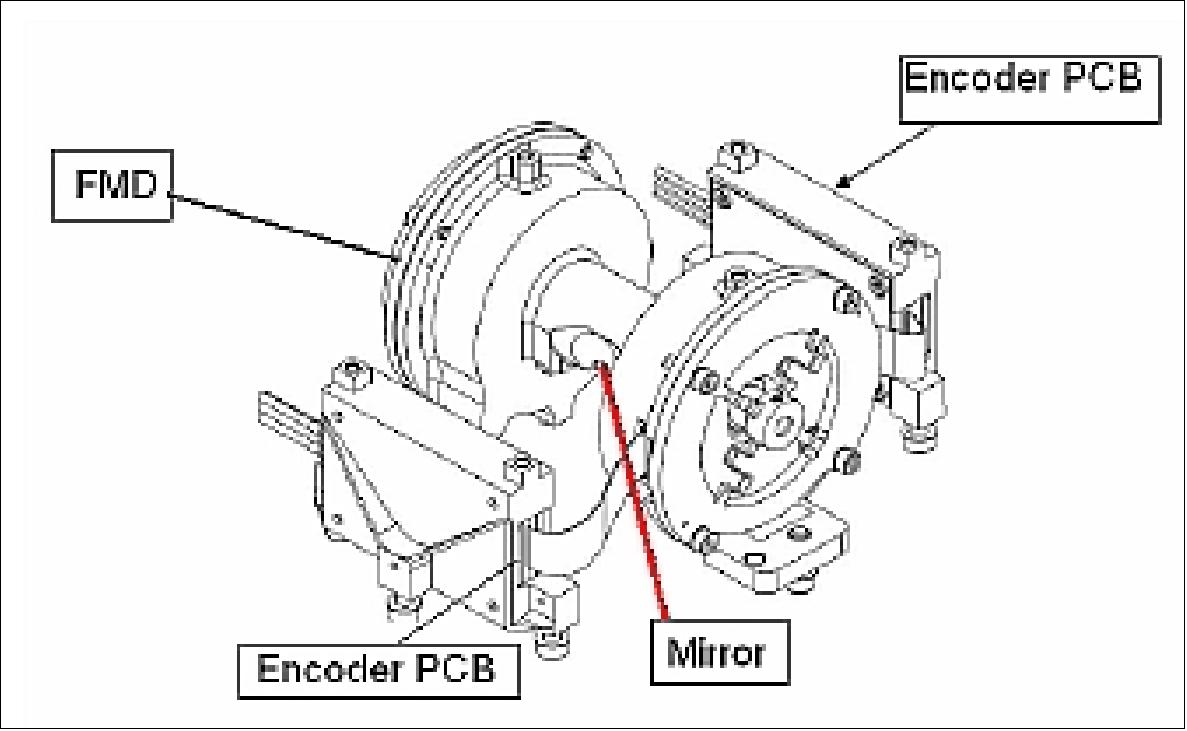
The final components selection includes a LAT-Motor actuator with an inertia of 1.46 x 10-6 kgm2 providing a torque of 36 mNm.
3) Scanning devices: To meet the improved GSD and mission performance requirements of the GMES program, the SLSTR scanning mechanism accuracy has been specified to be of the order of a quarter of 1 arcmin.
SLSTR has two scanners, referred to as SMU (SLSTR Scanning Mechanism), and one unit for their synchronization the SUE (Scan Unit Electronics). This synchronization is performed relative to an instrument clock for each 1 km pixel. An optical encoder with 21 bit resolution, a repeatability of 2 arcsec and a maximum absolute position error of about 6 arcsec had been selected.
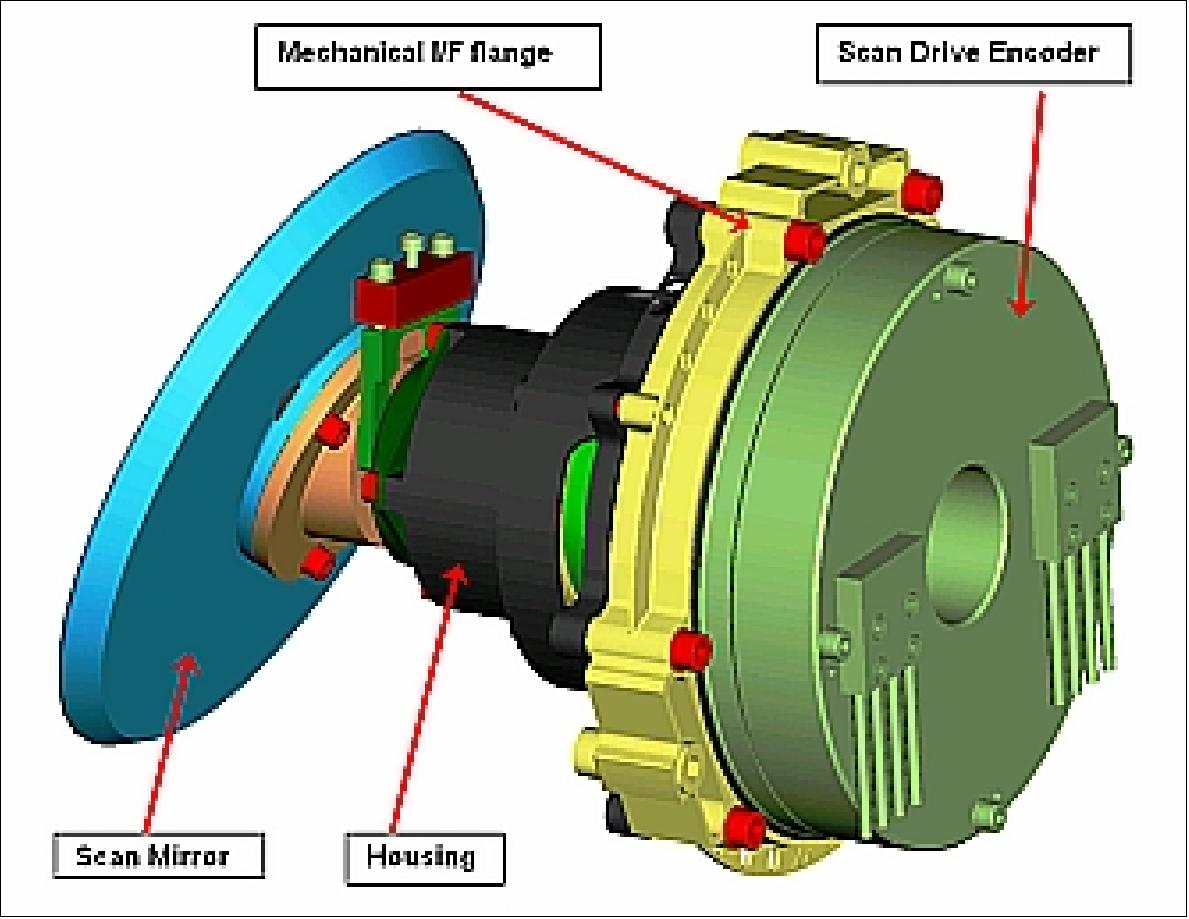
The primary performance requirement for the SMUs is to function in a system that defines the angle of mirrors via which SLSTR optically scans, positioning the pixels to the required accuracy. For vector components across the rotational axis, this limits run-out and lubrication track roughness. Along the scan swathes or around the SMU axis, accurate rotation angles are required at the time when each pixel is acquired.
In the SLSTR design, the SMUs drive the control position. This represents a considerably improved implementation over the AASTR design, in which the SMUs were driven at a constant angular velocity, and the swath pixel data was sampled and selected just on a time delay from a synchronization pulse. - For every SLSTR 'pix10sync signal', the position is being measured, implemented in a 100 Hz cut-off frequency closed loop circuit and transmitted to the ground for geolocation referencing. These measures offer a much more robust system in the event of some bearing torque degradation. Small scan mirror angle errors due to electronic noise or mechanical torques, either in the bearings or in external sources, can be corrected in part by means of the real-time positional control loop, the actual angles can then be used for later ground processing.
The maximum control loop pointing error is 5 arcsec. In case this tolerance will be exceeded, a flag will be set and transmitted with the telemetry data package of each scan.
The selected implementation for the SMU control system is an FPGA (Floating Point Gate Array) with an oscillator frequency of 40 MHz. A cascaded control scheme (Figure 78) is used with three levels:
- Current control loop (inner control loop) including the motor current commutation
- Speed control loop
- Position control loop (outer control loop).
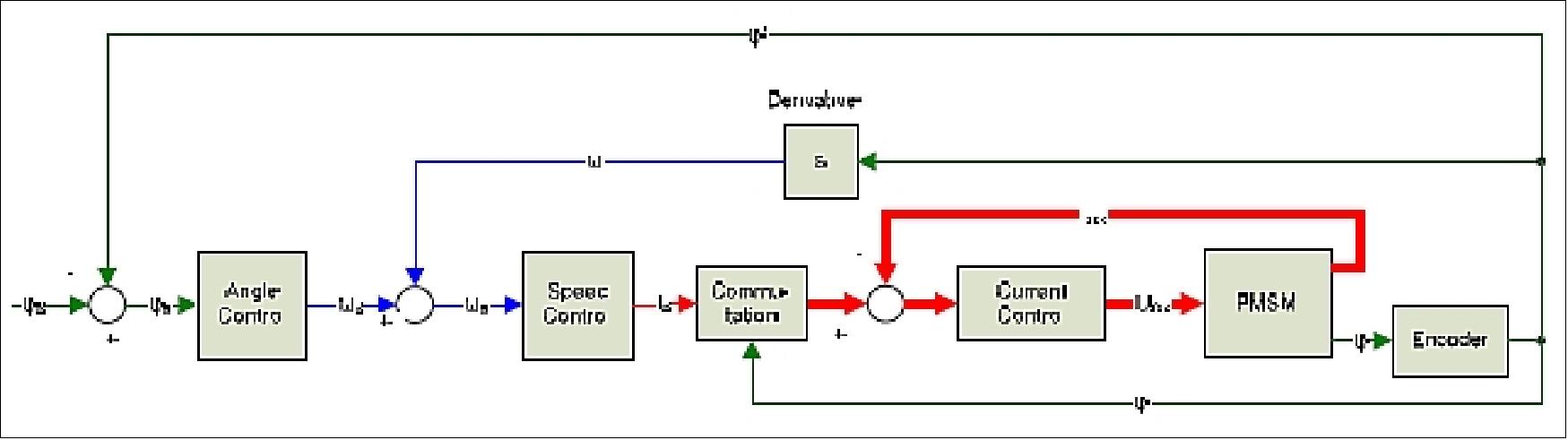
These loops work with different sampling frequencies. The current control works with 27.5 kHz, while the outer loop is fixed at the frequency generated from the PIX10SYNC impulse each 82 µs. The maximum PWM resolution is limited to 10 bit.
The Scanning mirror will be manufactured from beryllium alloy to provide a low overall mass and inertia as well as sufficient stiffness and thermal stability. It is mounted to the shaft via an angular adapter and a centering shim. Using a mechanism shaft of very high accuracy, the angular adapter can provide the required value and accuracy of the scan cone angle. The centering shim allows the dismounting of the mirror to the adapter without alignment loss.
The scan mirror I/F has a stress relieved mechanical design to prevent the mirror surface from disturbances arising from mounting forces (Figure 79).
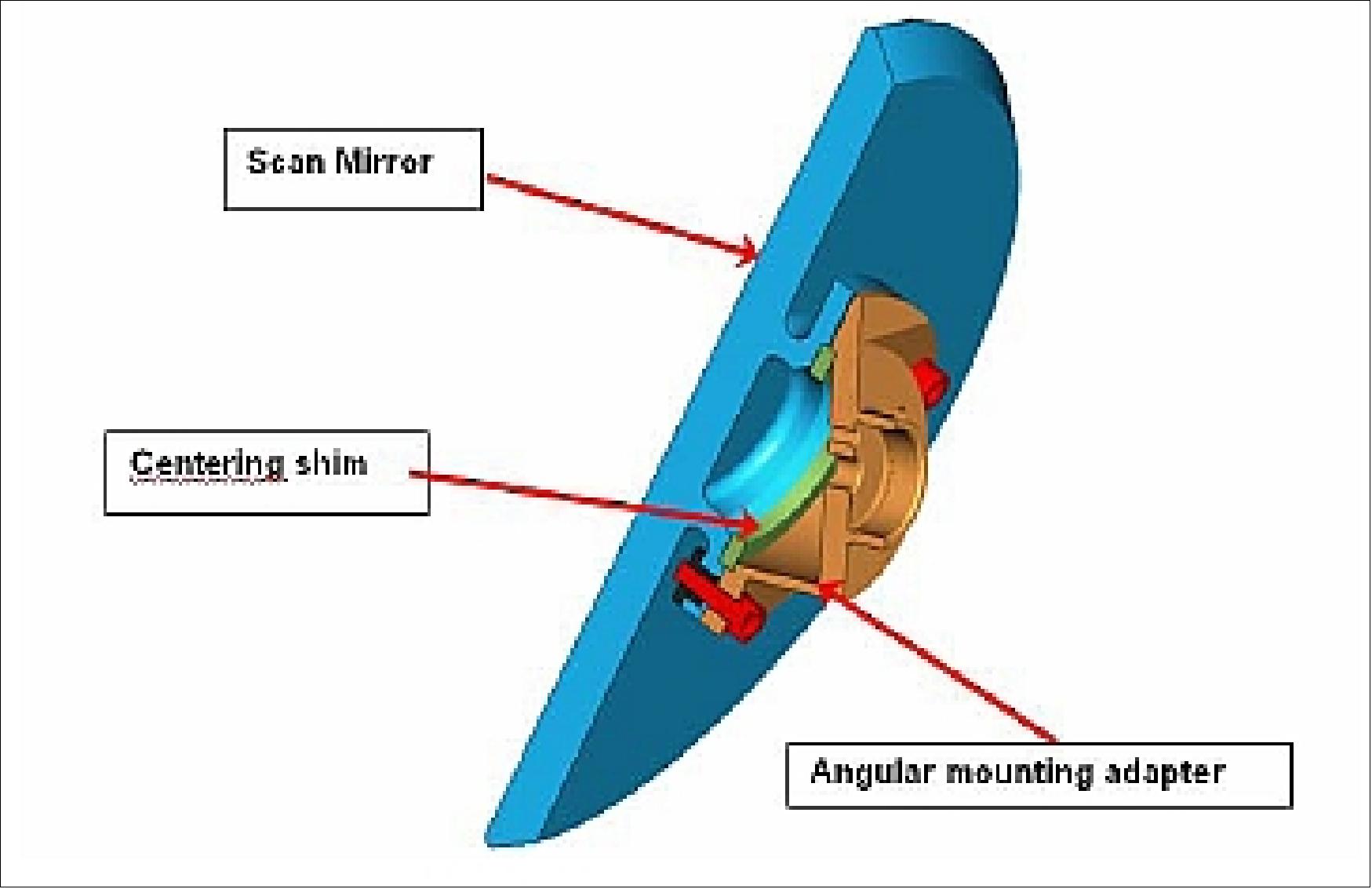
FPA (Focal plane Assembly) Technologies
1) General design considerations for the FPA: The FPA has an enclosure composed of a base-plate, a cylinder and an aluminum dome (Figure 80). The base-plate has an input field-limiting aperture, dichroics for spectral channels separation and lens optics to focus the beam onto each detector units. Note that the two scans are combined time multiplexed before they reach the FPA aperture.
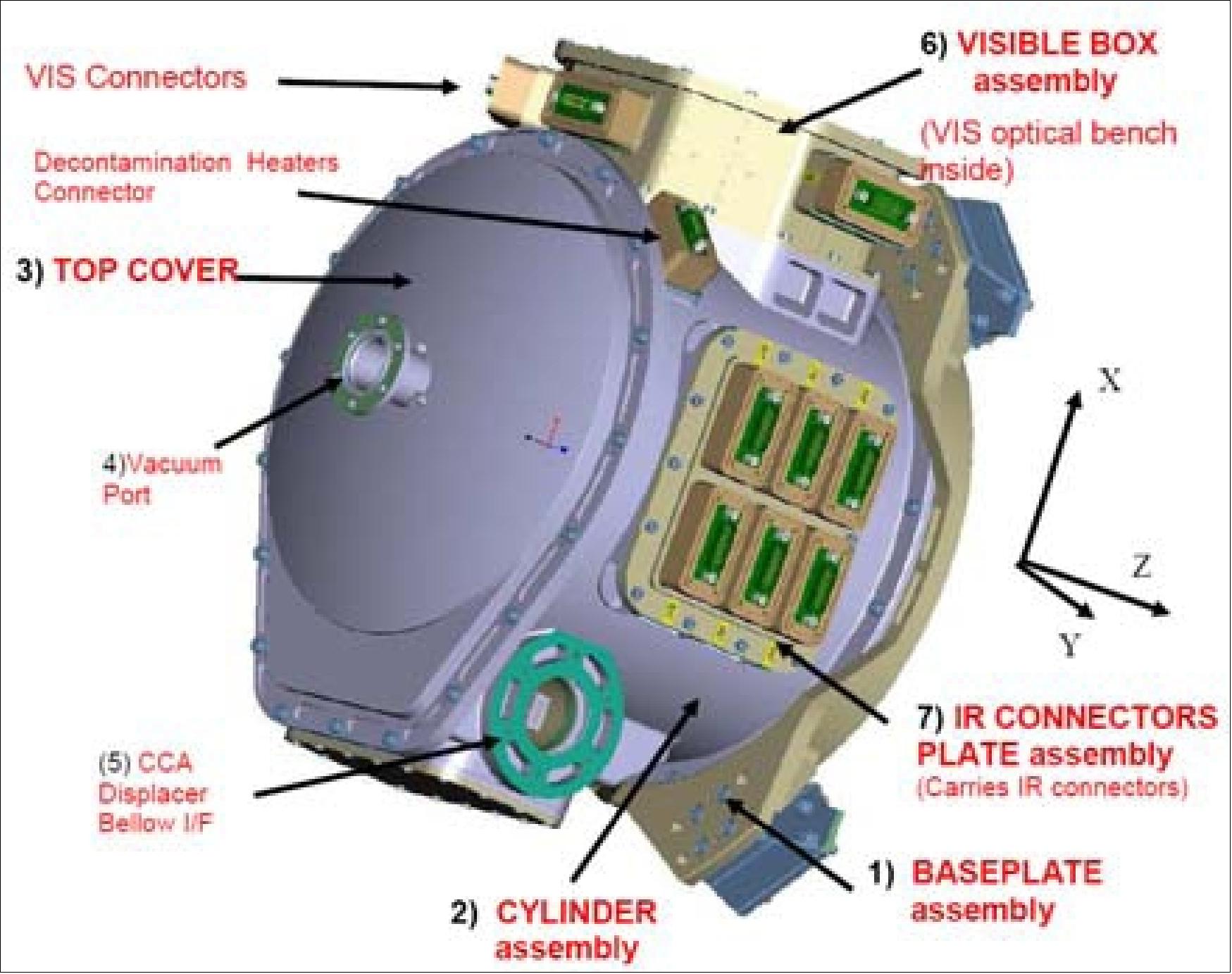
The IR (S7, S8, S9) and SWIR (S4, S5, S6) channels are implemented on either side of the cryo-optical bench, cooled to 80 K (Figure 81), while the VIS (S1, S2, S3) channels are disposed outside in a separate enclosure at about 260 K. All S4-S9 optics, the detectors and the baseplate are cooled down to 80 K by a cryocooler with good established space heritage, life-time and reduced vibrations.
The VIS beam is sent to a VIS box (containing all VIS dichroics, optics and detectors) which is controlled to a temperature of 260 K and is situated in the upper part of the FPA.
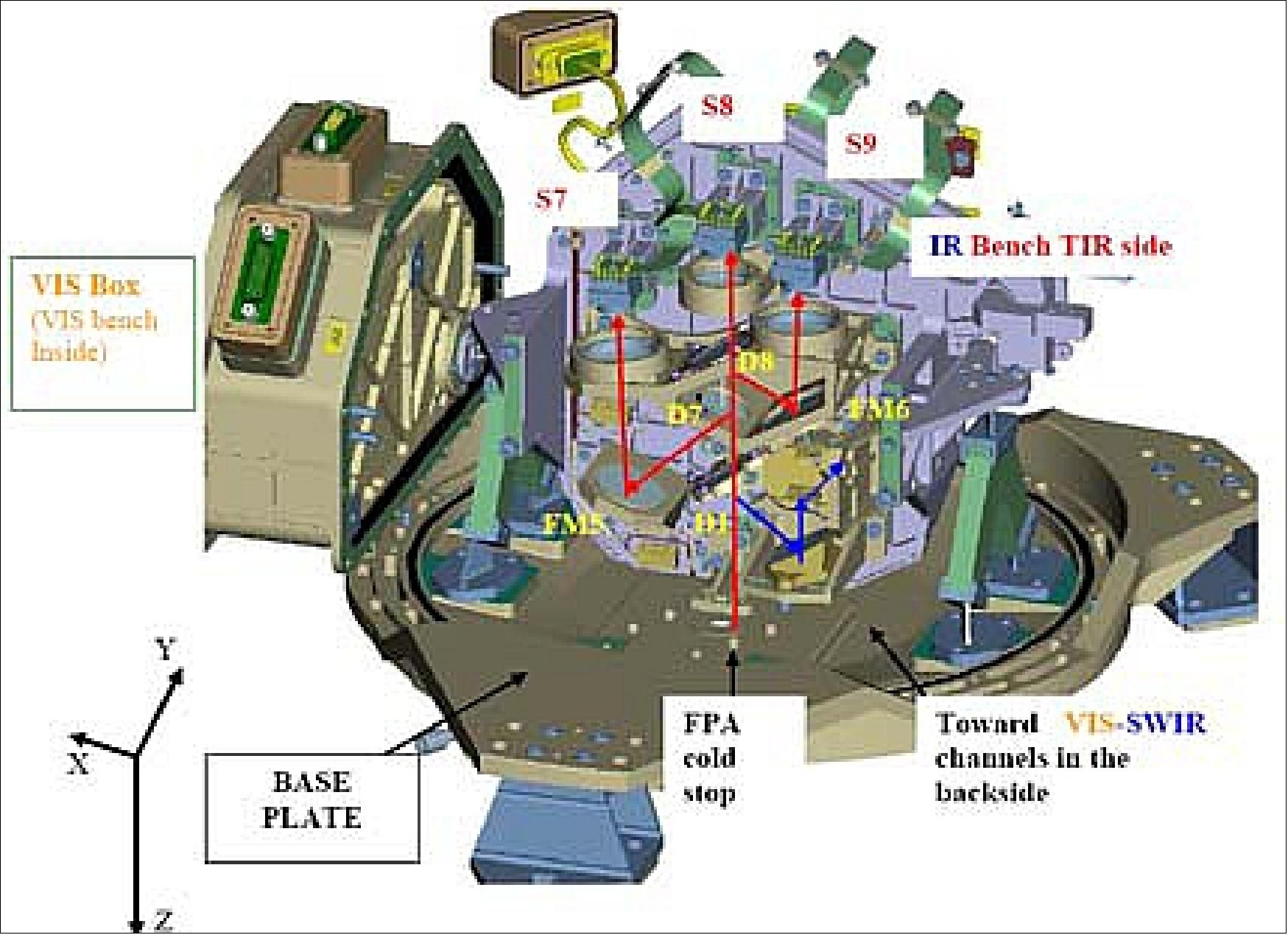
2) Detection module: The detection module is formed by 9 detectors optimized for low photon flux and high temporal response. Three custom photovoltaic (PV) silicon detectors cover the VIS and NIR bands (0.4 µm to 1.0 µm), four HgCdTe PV detectors are used on the SWIR/MWIR band (1 µm to 4.4 µm) and two photoconductive (PC) HgCdTe detectors provide coverage for wavelengths beyond 10 µm.
The Si detectors are mated to companion TIA (Trans-Impedance Amplifier) arranged in a particular configuration to achieve high bandwidth with very high feedback impedance. The HgCdTe PV detectors are wire-bonded to readout integrated circuits (ROIC) that provide integration and multiplexing. The CAIA (Capacitive Trans-Impedance Amplifier) readout cells provide customized integrating capacitance for each band with high efficiency at low photon fluxes and high bandwidth. The HgCdTe PC detectors are designed for high responsivity and detectivity and are technologically critical, requiring a material cut-off wavelength close to 14 µm at 90 K (S9). They are mounted inside the DA (Detector Assembly) to operate, respectively, at about 260-270 K (Si) and 80 K (HgCdTe), and are connected to the FEE (Front End Electronics) through a combination of flexible (inside the DA) and standard (outside the DA) cables for a total length of 1.5 m.
To cover the visible bands, the PV Si detectors are realized with two different epitaxial layers and three anti-reflection coatings optimized in the region of interest in order to achieve a global quantum efficiency of 80%.
Each device is composed by four 185 x 205 µm elements, separated by a narrow guard ring to reduce dark current and improve the MTF characteristics. A TIA feedback resistance, in the order of 240 MΩ, is needed to meet the severe performance requirement causing non-trivial difficulties in achieving electrical bandwidth higher than 15 kHz.
The SWIR/MWIR detectors operate with low photo-generated currents at nominal dwell time of 40 µs. With these levels of photon fluxes, the classical direct injection (DI) structure does not operate, because of its electrical bandwidth and injection efficiency. These detectors are based on CTIA technology to enhance the electrical bandwidth of the ROIC input stage while its capacitance is designed to comply with the expected radiance for each band to minimize the readout noise that is the main contribution to the noise figure at low signal levels. The S4-S6 detectors are formed by two columns of four 100 x 100 µm elements to have off-chip oversampling of the observed scene, while the S7 detector is formed by single column of 200 x 200 µm elements.
Additional elements for the F1 fire detector are mounted inside S7; these are arranged in a column of four pixels with an active area of 25 x 100 µm to reduce the photo-generated current. These elements are in fact bonded to the ROIC in a BDI ( Buffered Direct Injection) technology of the input stage, to comply with 500 K target temperature. The 1 km response is obtained by integrating the reduced FOV signal for the dwell time, because the fire detector elements are mounted perpendicular to the along-scan direction. The BDI technique was chosen to implement the large capacitance needed to store the signal generated by high fluxes at high temporal variations but it is also able to handle the calibration signal from on-board 300 K BB at long observation periods with sufficient SNR.
The global quantum efficiency of the SWIR/MWIR devices is 80%, including the narrow band filter, with saturation charges and readout noises, respectively, of 0.6 M to 4 M and 150 to 350 electrons, depending on band, together with linearity of 1%. The global quantum efficiency of the MWIR fire elements is 70%, including the narrow band filter, with saturation charge and readout noise, respectively, of 20 M and 550 electrons, together with linearity of 1%. The photodiodes, the ROICs and the temperature sensors are mounted on the fan-out ceramics with thick film conductors as shown in Figure 82.
The TIR detectors use the bulk photoconductor concept with particular layout to increase their responsivity. Although the increasing of the bias current would appear to be a straightforward way to improve the detector sensitivity, it involves also the increasing of the noise. Indeed, low current operation provides optimum SNR and an improved response spatial uniformity.
A responsivity as large as 150 KV/W is required to minimize the noise coming from the downstream electronics and in particular to the voltage noise of the OpAmp used for the high gain preamplifier. The resistor values of the PC elements are low and hence, the time constant is of few µs, due to the recombination time of the photo-generated carriers. The detectors contain two pixels, and each pixel is made with pairs of elements, one active and the other blind. The advantage of this arrangement is that the two parts are balanced when there is no radiation falling on the active part. This measure reduces the offset considerably as well as the thermal and ageing effects, since the signals from the active and blind part are differentially amplified. The global quantum efficiency of the LWIR (Long Wave Infrared) S9 elements is 70%, including the narrow band filter, with a detectivity of about 2.5 x 1011 Jones at 80 K, a linearity of 1%, and an element matching of 2%. Note: the 'Jones' is a unit of specific detectivity. - All detectors are in compliance with the SLSTR radiation requirements.
The SLSTR FPA requires special care in the routing, shielding and grounding of very low noise PC signals in the presence of high level PV signals. The FPA signals are received by the FEE (Front-End Electronics) in radiation-tolerant and redundant design with free fault-propagation circuits interfacing the detectors. The FEE operation is controlled by FPGA allowing some flexibility in the acquisition characteristics via ground commands. The main demands of the detection system are:
- Same temporal-spatial response for the VIS/SWIR, TIR and fire channels
- Extremely low thermal variation of the gain and offset
- Very low noise.
3) FEE (Front End Electronics): The FEE is subdivided into a common and a cold-redundant part as depicted in Figure 83.
The former (in red) includes the functions strictly associated with DU like bias and p/s voltages, differential receivers of the analog signals and temperature sensor switching. It is formed by nine separated and independent sections having dedicated protections to avoid failure propagation.
The latter comprises the functions associated to the video processing of the analog signals, including amplification, filtering, offset correction, sampling and/or integration up to the A/D conversion, the generation and distribution of the timing signals, the HK (Housekeeping) signal acquisition, the power supply filtering, the LVDS interface for the synchronization signals, and the SpaceWire interface for command/telemetry. To manage the 20 analog chains, the FEE architecture uses 10 radiation hardened ADC RHF1401, working in parallel and interfacing to the FPGA RTAX2000 though 10 private buses.
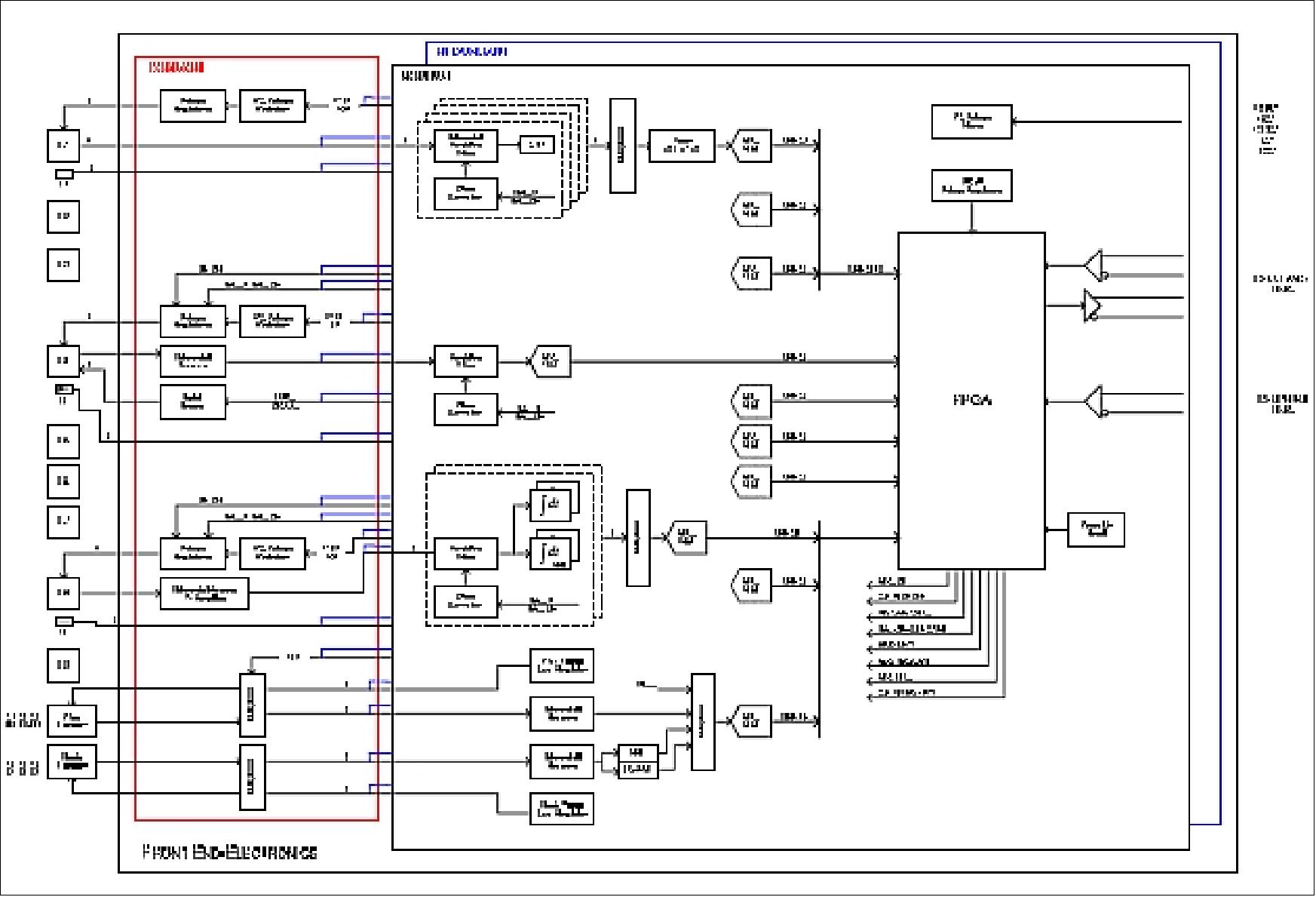
Three types of analog processing are employed for the VIS, SWIR/MWIR, and the TIR signals. The implementation of the F2 channel is of some interest; it is derived from the S8 chain after the preamplification and offset correction as shown in Figure 84.
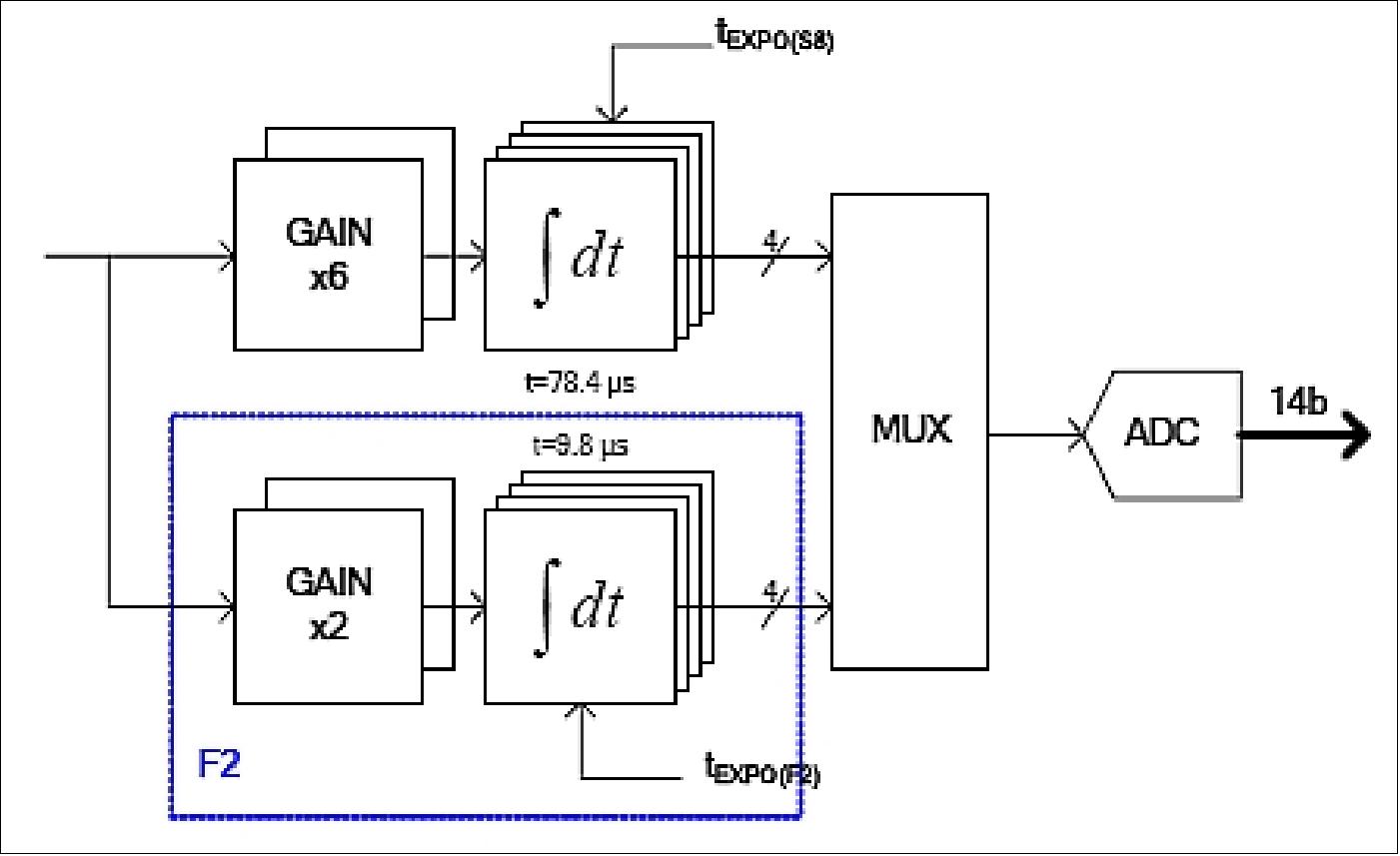
Each PC signal is generated by a bridge configuration, using the active and blind elements whose bias currents can be adjusted by resistors, to reduce the dc offset when blanked. It is amplified by using two stages with an intermediate offset correction feature for a total gain of about 300. The PC preamplifier uses the RH1028 with excellent noise performance having a voltage noise less than the noise of a 50 Ω resistor. However, careful attention has to be paid to limit the effect of the bias noise.
Multiple acquisitions with the decimation technique are used to reduce the ADC (Analog Digital Converter) noise to about 100 µV rms (~ 1 LSB of 14 bit ADC) with each data coded in a 16 bit string. In this way the ADC noise contribution to the overall noise is further reduced allowing fixed amplification, because each channel noise is dominated by the corresponding detector noise.
SLSTR budget: The SLSTR instrument has a nominal mass of 140 kg (160 kg max) and the nominal power consumption of 155 W.
Topography Payload
The objective of the topography mission is to provide measurements over the open Ocean, coastal zones, ice sheets, rivers and lakes. Measurements over open oceans will contribute jointly with other operational missions to the realization of a permanent Global Ocean Observing System (GOOS). The main parameters measured over the open sea are SSH (Sea Surface Height) and SWH (Significant Wave Height) allowing to retrieve sea surface wind speed.
The science goals of the topography mission can be summarized as: 82)
• to continue and extend the current set of altimetry measurements at least at the level of quality of the Envisat RA (Radar Altimeter)
• to provide along-track SAR processing to improve acquisitions for coastal zones, in-land water and sea-ice topography
• to provide open loop tracking through an onboard stored DEM (Digital Elevation Model) to improve acquisitions over inhomogeneous or rough topography.
All altimetry products will be delivered as NRT (Near-Real- Time) within 3 hours after acquisition with an orbit estimate from the GNSS receivers. STC (Standard Time Critical) and NTC (Non Time Critical) products will improve orbit estimates with complementary information from DORIS and the laser reflector.
SRAL (SAR Radar Altimeter)
SRAL is a redundant dual-frequency (C-band + Ku-band) nadir-looking altimeter instrument, and the core instrument of the topographic payload. The overall objectives are to provide altimetric data (basic measurements of surface heights, sea wave heights and sea wind speed) relative to a precise reference frame. SRAL has a strong heritage of the instrument techniques implemented for the Poseidon-3 altimeter on Jason-2 (launch June 20, 2008), SIRAL (SAR Interferometer Radar Altimeter) on CryoSat-2 (launch April 8, 2010), and AltiKa (Altimeter in Ka-band) on the SARAL mission of ISRO and CNES (launch 2012). The SRAL instrument is being developed at TAS (Thales Alenia Space) of Toulouse, France. 83) 84) 85) 86)
The SRAL radar uses a linearly frequency-modulated pulse (chirp) and the pulse compression is carried out on-board by means of the deramp technique. The main frequency used for surface height measurements is the Ku-band (13.575 GHz, bandwidth=350 MHz), whereas the C-band frequency (5.41 GHz, bandwidth=320 MHz) is used for the ionospheric corrections. The frequency plan is compliant with the ITU (International Telecommunication Union) regulations. A 50 ms pulse duration for both frequencies has been sized as a trade-off result between a high BT product and the timing constraints of the burst pattern of the SAR mode.
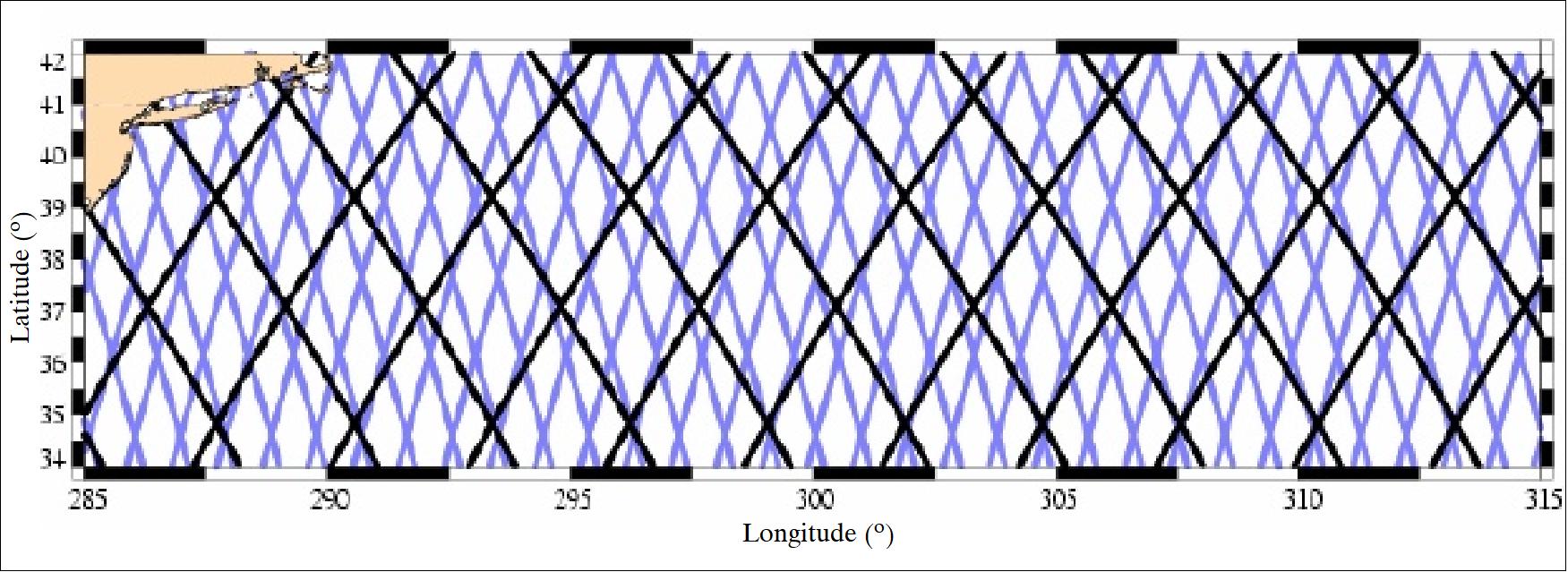
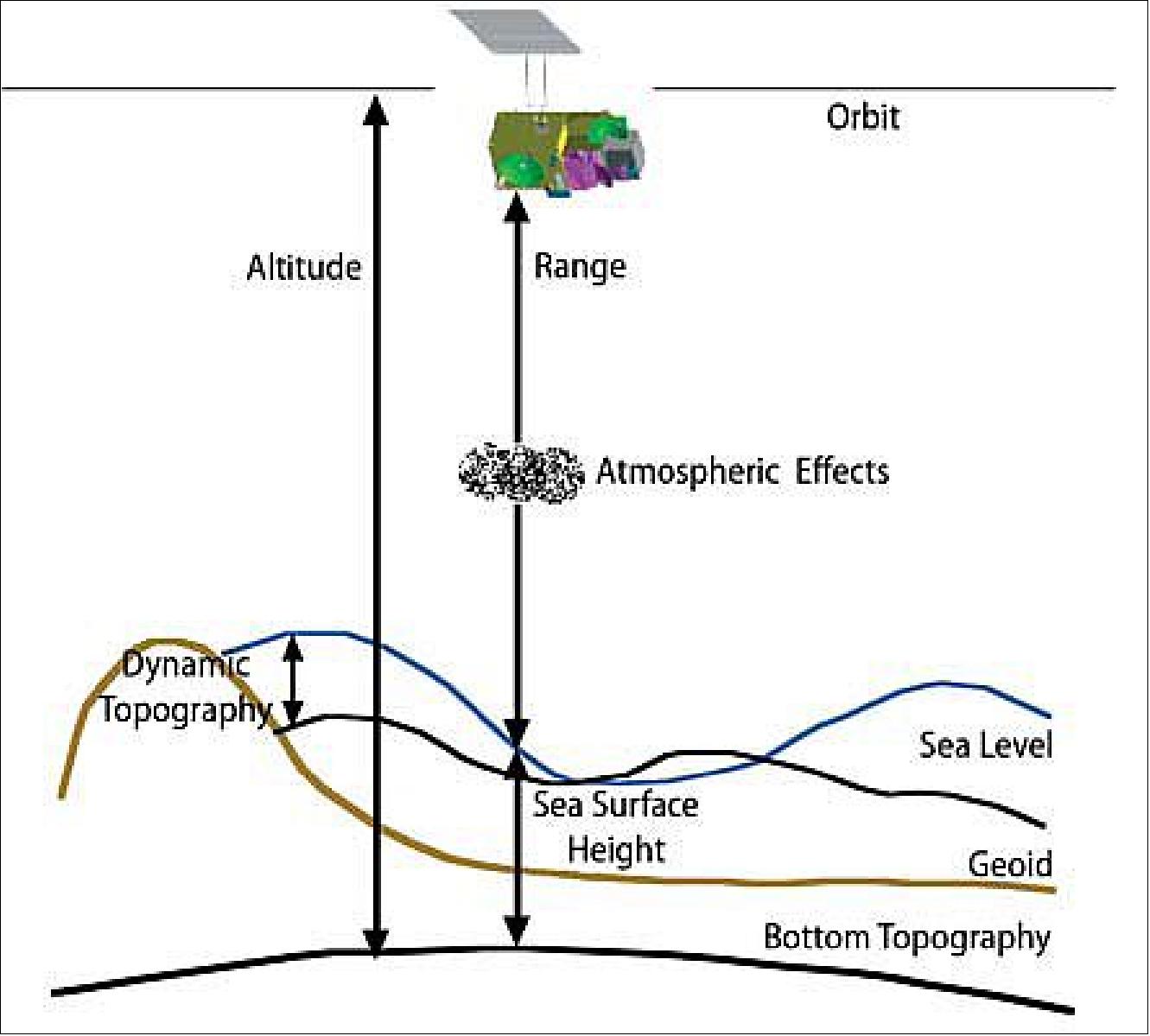
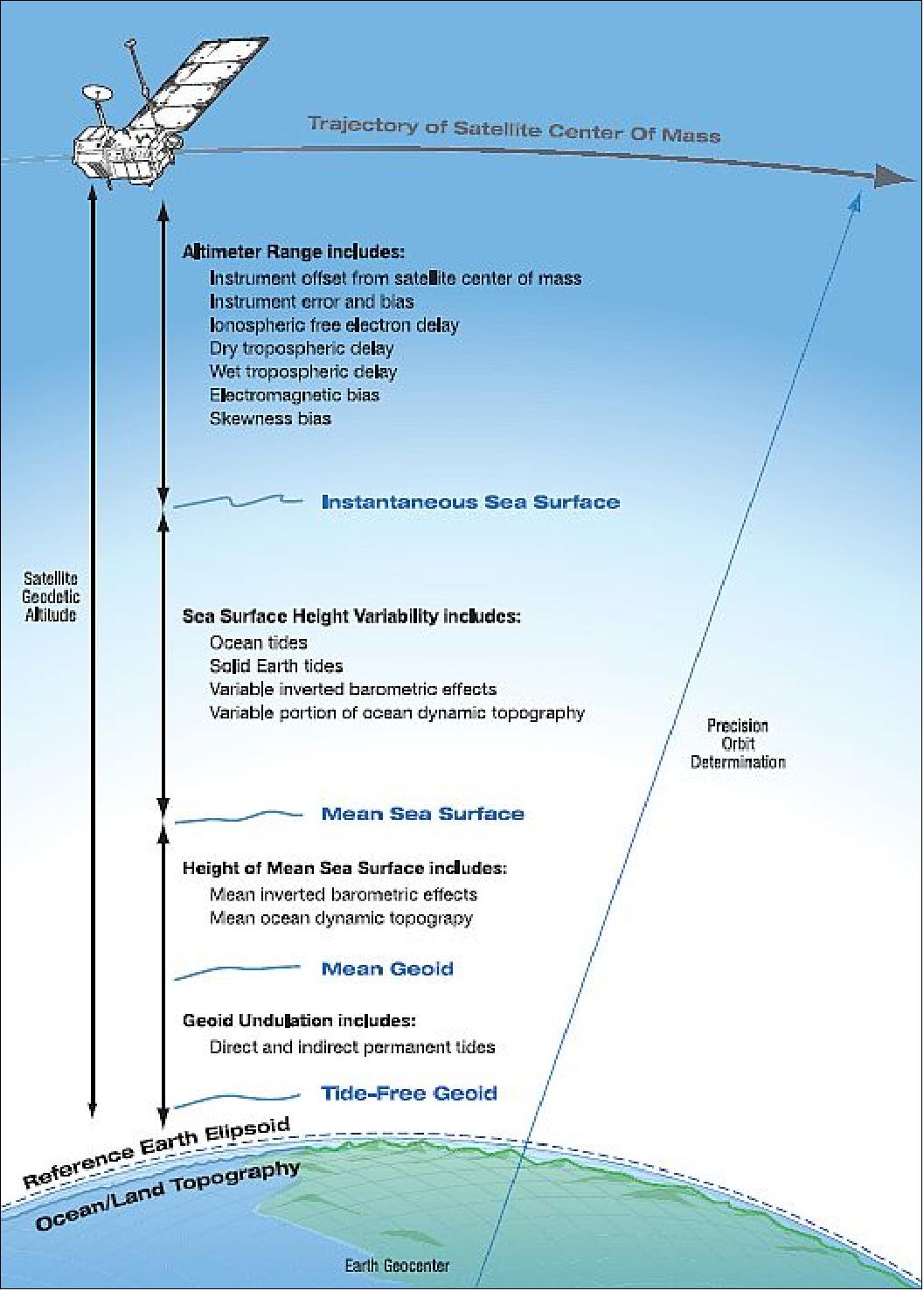
The main characteristics of the SRAL (SENTINEL-3 Ku/C Radar Altimeter) are: 87)
• radar measurement modes: LRM and SAR
• tracking modes: closed and open-loop
• pulse repetition frequency: 1.9 kHz (LRM), 17.8 kHz (SAR)
• total range error: 3 cm
• launch mass: 60 kg.

The SRAL altimeter instrument is made of one nadir looking antenna subsystem which is externally mounted on the satellite +Zs panel and central electronic chains composed each of a DPU (Digital Processing Unit) and a RFU (Radio Frequency Unit). The central electronic chains are mounted inside the satellite on the -YS panel and are treated according to a cold redundancy scheme.
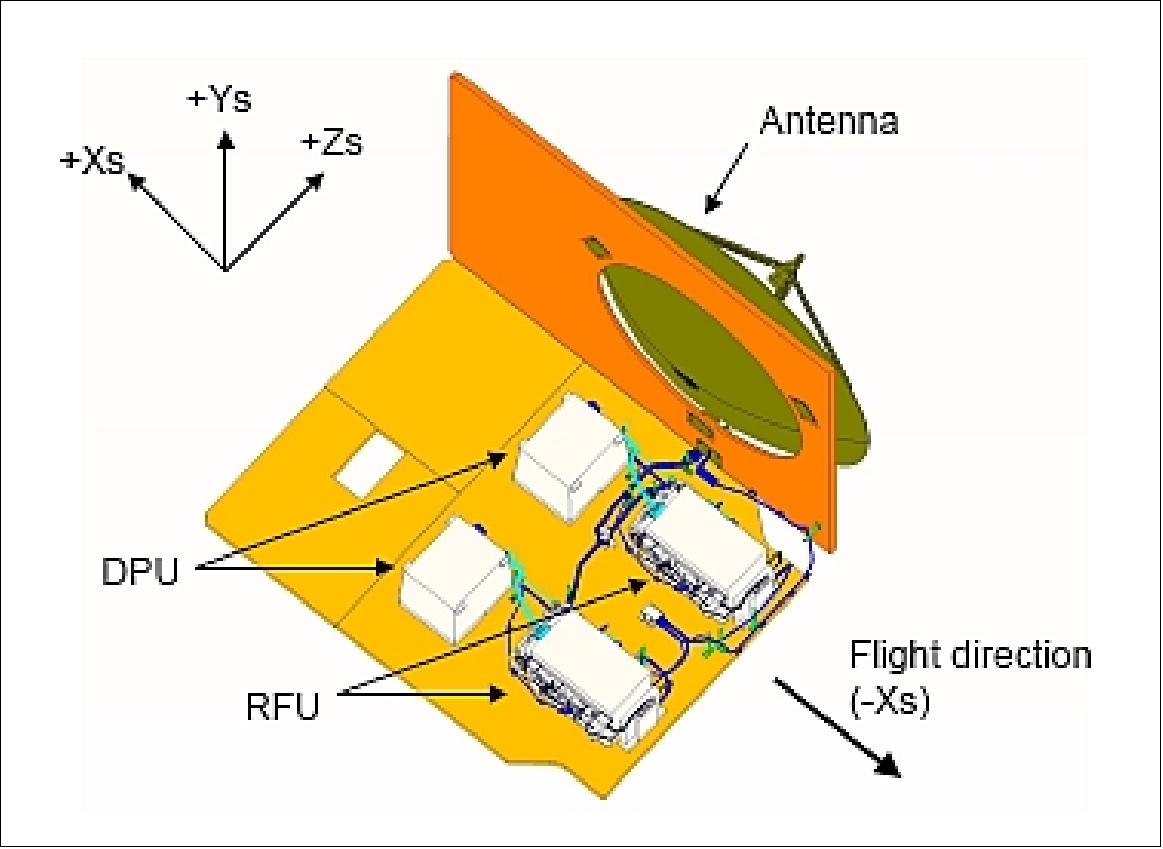
SRAL Modes of Operation
The SRAL instrument includes measurement modes, calibration modes and support modes. The measurement modes are composed of two radar modes associated to two tracking modes. The two radar modes are the following:
• LRM (Low Resolution Mode). It refers to the conventional altimeter pulse-limited resolution mode (so far, the LRM mode is being used on all altimetry missions). It consists of regular emission/reception sequences at a fixed PRF (Pulse Repetition Frequency) of around 1920 Hz leading to an ambiguity rank of 10.
• SARM (SAR Mode): This is a high along-track resolution mode composed of bursts of Ku-band pulses.
These modes are associated to two tracking modes which consist of the following:
- Closed-loop mode: refers autonomous positioning of the range window (ensures autonomous tracking of the range and gain by means of tracking loop devices implemented in the instrument).
- Open-loop mode: refers to the positioning of the range window based on a-priori knowledge of the terrain height from existing high-resolution global digital elevation models.
The open-loop is intended to be used instead of the more conventional closed-loop tracking over some surfaces, to improve the acquisitions over inhomogeneous or rough topography. While in open-loop, the setting of the tracking window of the altimeter is driven by predetermined commands, stored on board, combined with real-time navigation information available from the GNSS receiver. The main advantage is that the measurements are continuous, avoiding the data gaps typical of closed-loop tracking, which has problems in tracking the rapid topographic changes at coastal margins and in mountainous regions.
Surface type | Instrument operation | |
Mode | Tracking | |
Open ocean | LRM | Closed-loop |
Coastal ocean | SARM | Open-loop |
Sea ice | SARM | Closed-loop |
Ice sheet interiors | LRM | Closed-loop |
Ice sheet margins | SARM | Open-loop |
Rivers/lakes | SARM | Open-loop |
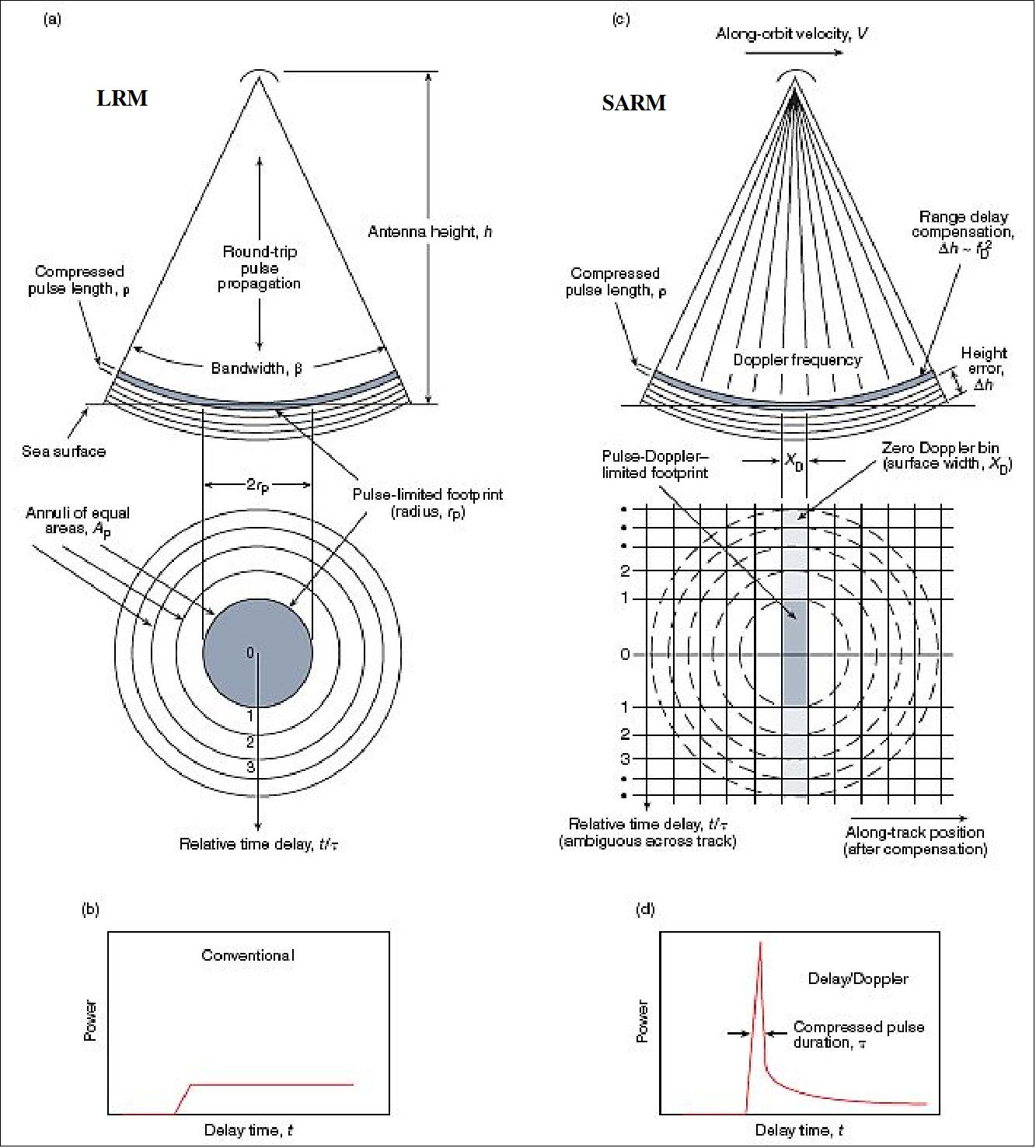
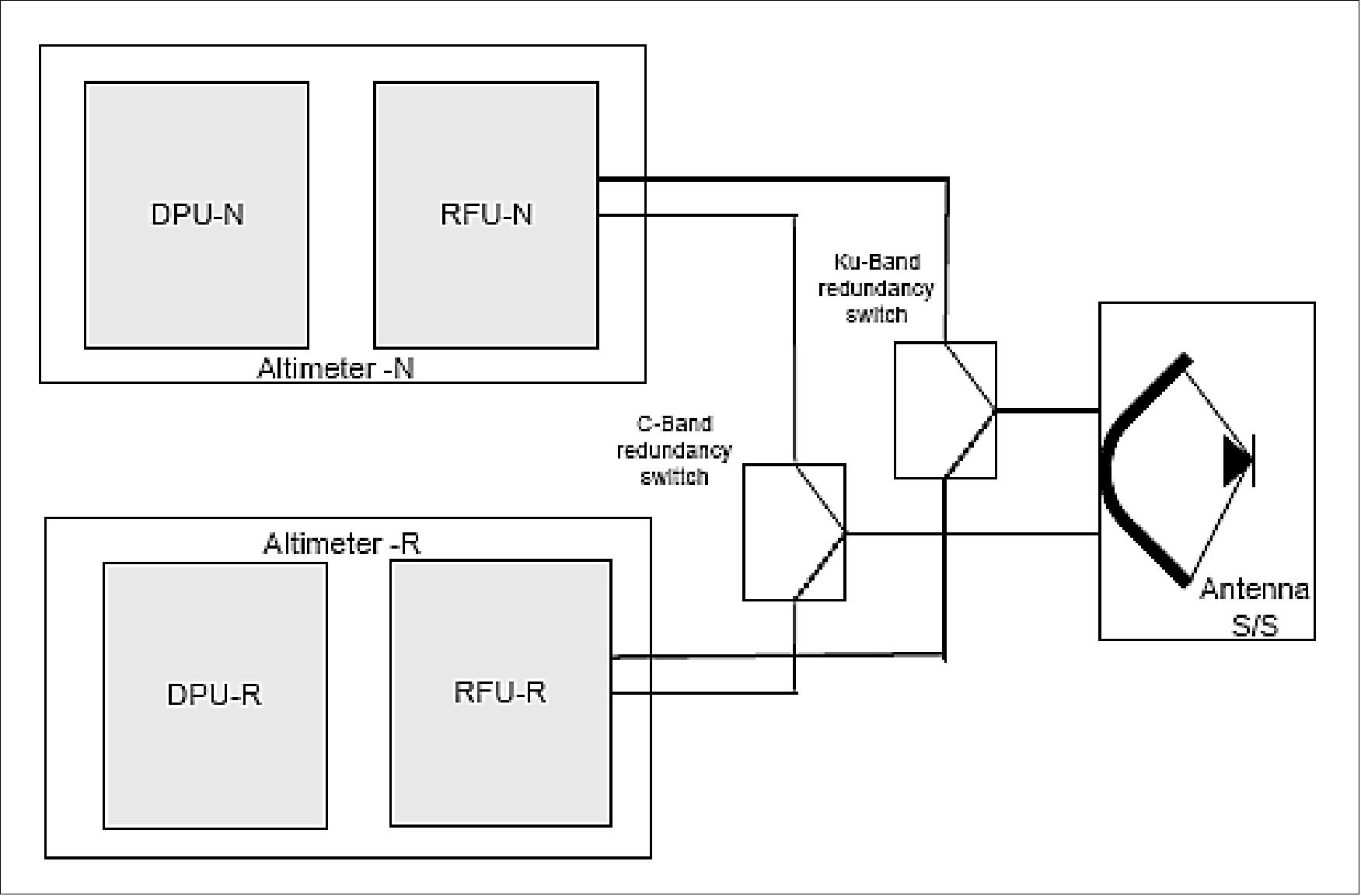
The SRAL instrument generates either C-band or Ku-band pulses in order to simplify the hardware design. However, the periodic emission of elementary patterns (1 C-band pulse is surrounded by 6 Ku-band pulses, denoted by 3Ku/1C/3Ku) ensures a sufficient correction of the ionosphere bias (Figure 92).
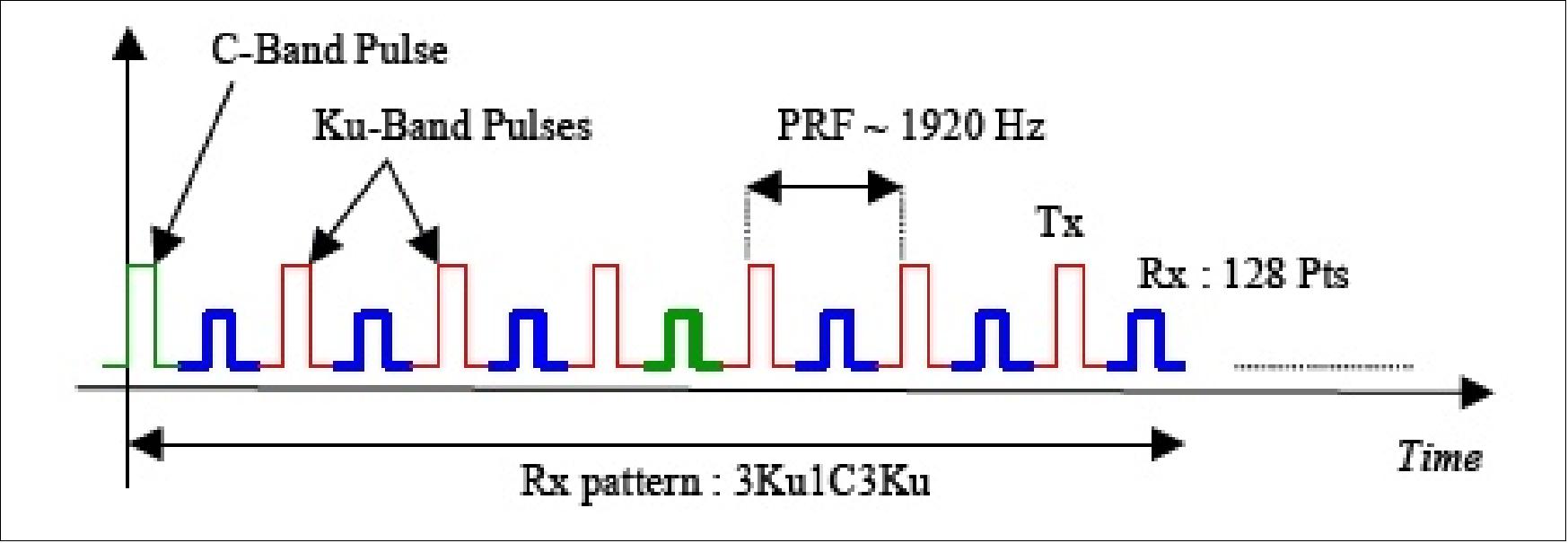
After de-ramping and digital processing, the echo received from each pulse is sampled on 128 points corresponding to a 60 m range window. The C- and Ku-band echoes are submitted each to a FFT (Fast Fourier Transform) to return to the time domain after deramp. Then, C- and Ku-band echoes are accumulated separately over a 50 ms cycle corresponding to an accumulation of 84 Ku-band pulses and 14 C-band pulses over that cycle.
SARM (SAR Mode): The implementation of a nadir SAR mode provides an enhanced along-track (azimuth) resolution (~ 300 m) w.r.t. the LRM mode. This feature allows to acquire height measurements over along-track sliced areas sampled at the 300 m resolution. It is of prime interest to discriminate finely sea/ice transitions, sea/land transitions in a coastal area or inland water areas.
The SAR mode consists of periodical emissions/receptions of bursts composed of 64 Ku-band pulses surrounded by 2 C-band pulses (Figure 93) again for ionosphere delay correction. The 64 Ku-band pulses are generated coherently within a burst to carry out azimuth resolution enhancement on a burst basis by means of Doppler filtering. The burst emission / reception cycle is completed before the next burst cycle. The burst cycle duration is about 12.5 ms in such a way that a 4-burst cycle is equal to the LRM cycle of 50 ms. The PRF within a burst is around 18 kHz.
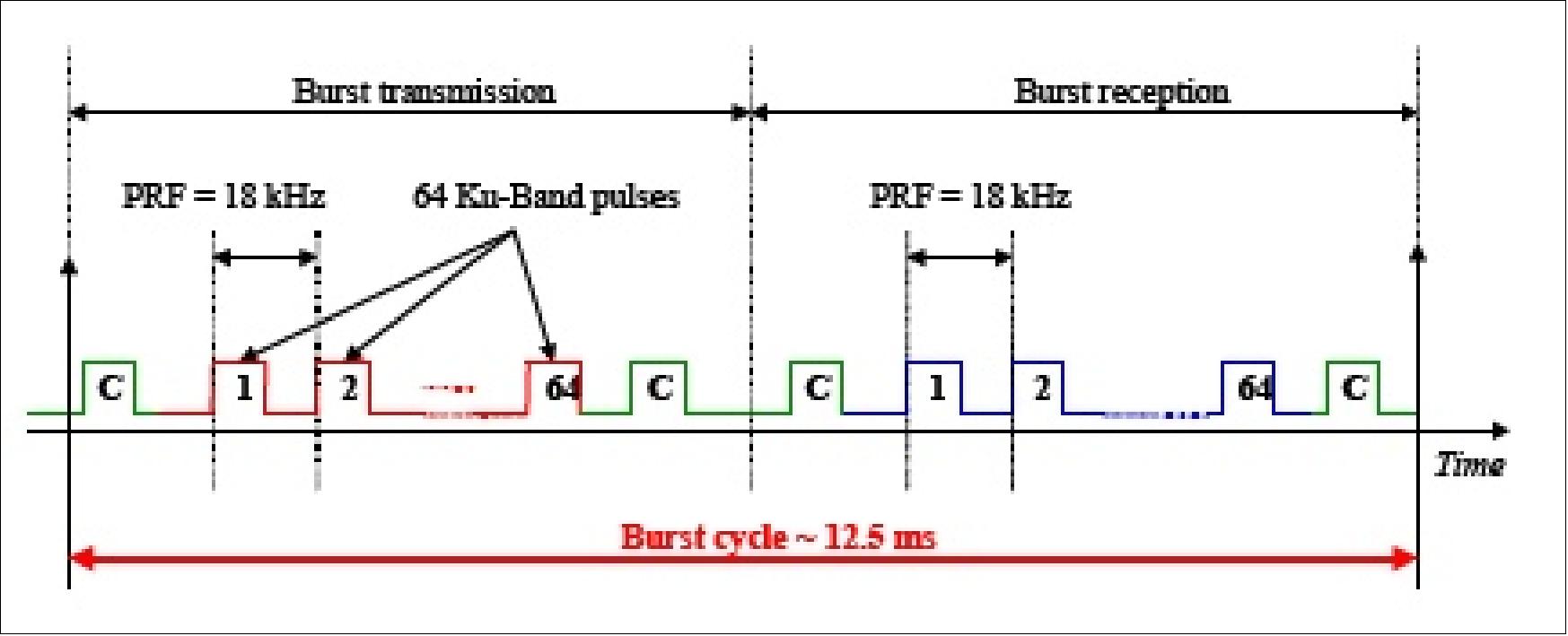
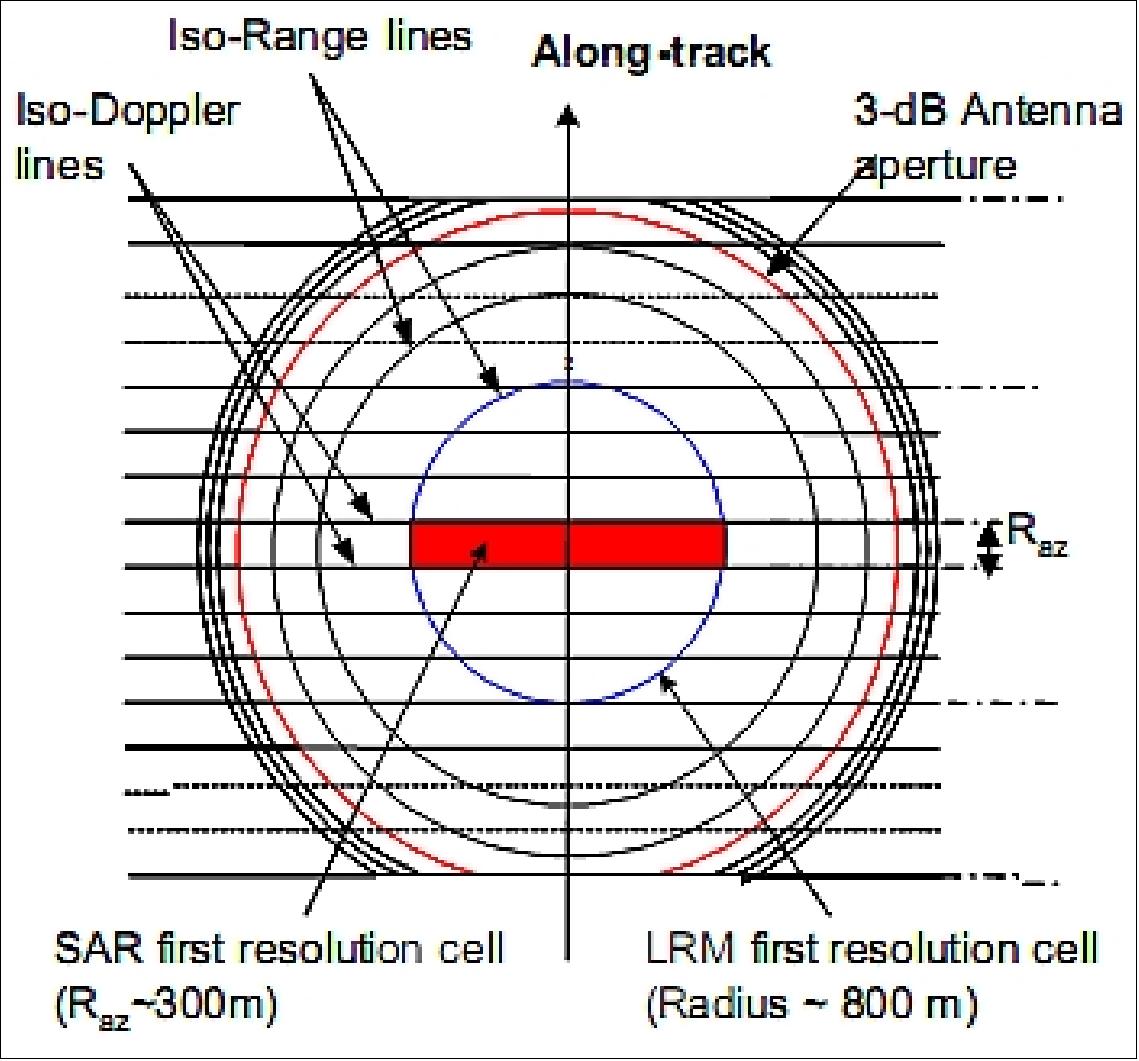
Calibration mode: Two specific calibration modes have been designed to refresh the calibration parameters required for ground processing and to monitor the good health of the instrument in flight configuration. The CAL-1 mode allows to calibrate the internal impulse responses (range and azimuth impulse responses in C- and Ku-band) whereas the CAL-2 mode allows to calibrate the gain profile of the range window by averaging thermal noise measured at each C- and Ku-band antenna port.
Parameter | LRM mode | SAR mode |
Power consumption | 90 W | 100 W |
Data rate | 100 kbit/s | 12 Mbit/s |
Instrument mass | < 62 kg | |
Reliability @ 30ºC | > 0.92 | |
The “dual-like” features of the SRAL instrument (dual frequency, dual radar mode, dual tracking mode) make it possible to acquire very accurate topography data over all types of surfaces covered by the Sentinel-3 mission. And the “dual” central electronic chain ensures a high degree of reliability.
SRAL antenna: The antenna is made up of a 1.20 m parabolic reflector with a C/Ku dual frequency feed horn placed in a centered configuration at a focal length of about 430 mm. The feed is supported by 3 struts separated by a 120º angle: Two of them are doubled to improve the sidelobe ratio performance and the third one supports the Ku-band waveguide. It must be pointed out that the position of the strut ends on the reflector to match the reflector brackets position in order to improve the mechanical robustness of the antenna.
The antenna provides a minimum gain of 41.5 dBi in Ku-Band and 31.6 dBi in C-band at bore sight in the signal bandwidths. The side-lobe level is lower than –18 dB in Ku-band in order to minimize the Range Ambiguity Ratio.
The SRAL antenna is manufactured by MDA (MacDonald Dettwiler and Associates Ltd.), Richmond, BC, Canada. The center-fed linearly-polarized antenna has a mass of < 7 kg. 89)
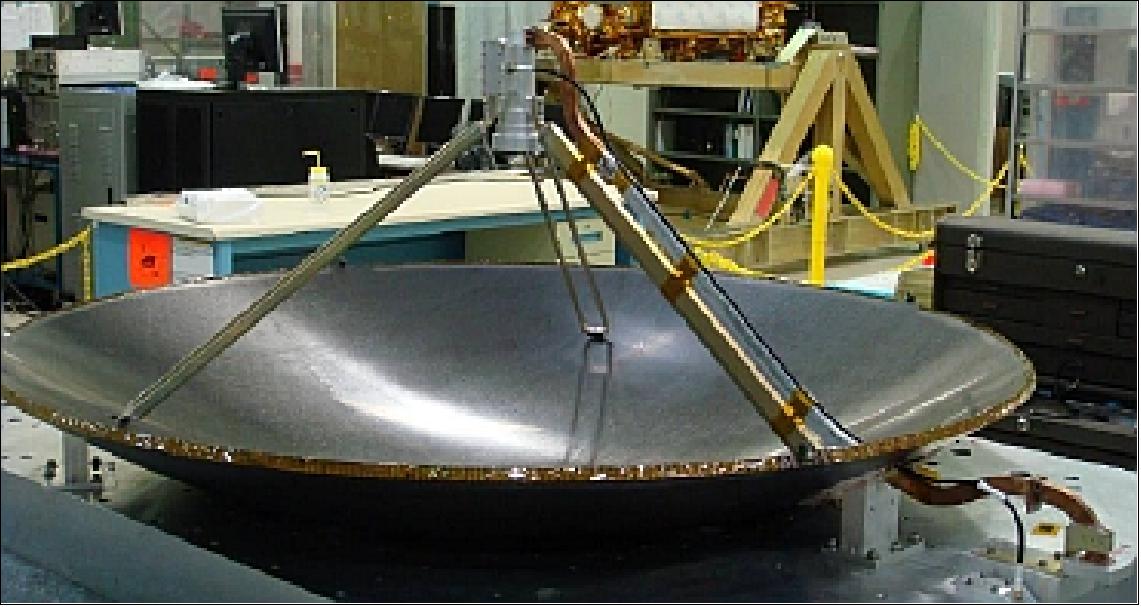
RFU (Radio Frequency Unit): The RFU equipment (Figure 96) is made up of slices which are stacked together except the C- and Ku-band duplexers that will be fixed independently on the satellite panel. The RFU up-converts chirp signals from 50 MHz to C- and Ku-band and provides an output power of 38 dBm in Ku-band and 43 dBm in C-band. The up -conversion stage also includes an expansion of the chirp bandwidth by a factor of 16. Received echoes in C- and Ku-band are deramped down to 100 MHz. The deramp output produces a useful signal bandwidth of 2.86 MHz which is then processed by the DPU.
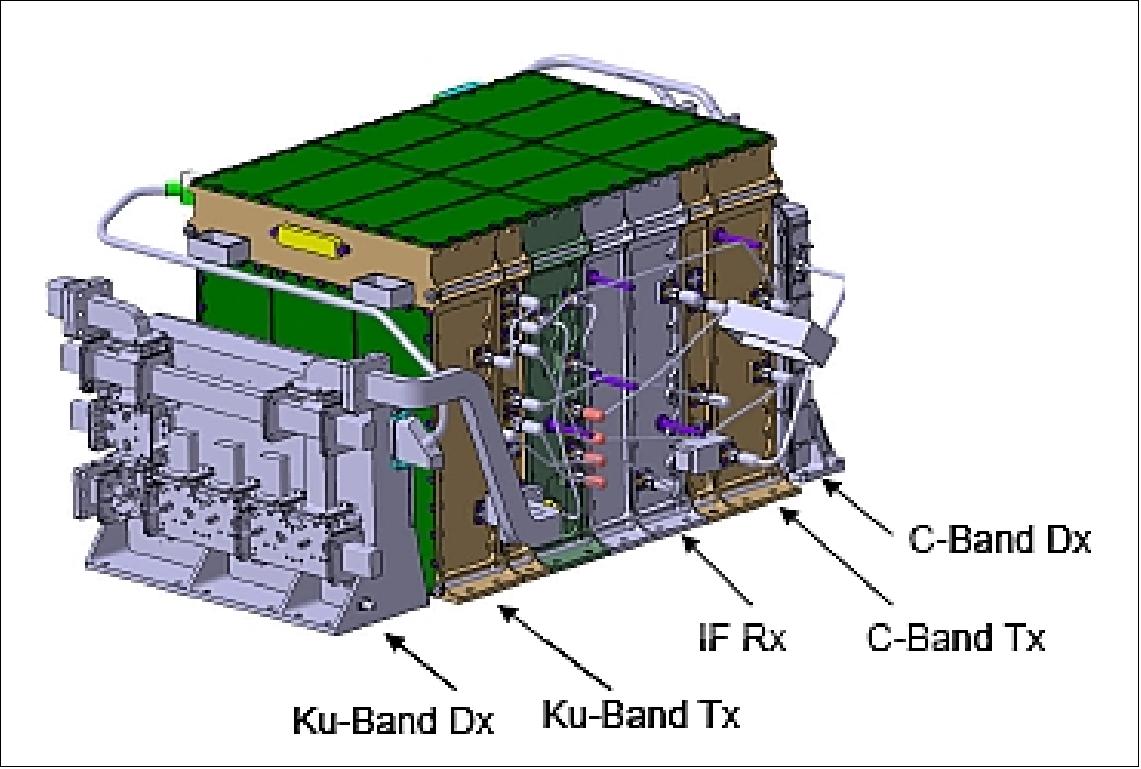
DPU (Data Processing Unit): The DPU is a rack of 6 boards plus an interconnection board. Its main functions are:
• Generation of a chirp signal centered at 50 MHz at PRF (Pulse Repetition Frequency) rate
• Processing of deramped echoes including digitization, I/Q demodulation, FFT and echo accumulation
• Transmission of science data on SpaceWire link
• Echo processing (range and tracking) for the closed loop mode operation
• Storage and management of on-board Digital Elevation Model for Open-Loop tracking
• Management of 1553 TM/TC interface with the platform
MWR (Microwave Radiometer)
MWR is a nadir looking sounder, operating at 23.8 and 36.5 GHz (K/Ka-band) covering a bandwidth of 200 MHz in each channel. The objective is to provide water vapor and cloud water contents in the field of view of the altimeter, necessary to compensate for the propagation delay induced by these atmospheric components and affecting the radar measurements. Such corrections are only possible over the ocean, where the background noise is stable and can be quantified either by the 3rd (optional) radiometer channel, or derived from the altimeter measurements of the backscattered power. Alternatively, over ice and land surfaces where MWR data cannot be used, wet troposphere corrections will be derived based on global meteorological data and dedicated models.
The MWR instrument is being developed by Airbus DS-CASA Espacio of Madrid, Spain (formerly EADS CASA Espacio) under contract with Thales Alenia Space France (TAS-F) and ESA. MWR measures the thermal radiation emitted by Earth (brightness temperature). The received signal is proportional to the abundance of the atmospheric component emitted at the observed frequency and the sea-surface reflectivity. This information reveals the delay added to the altimeter pulses by moisture in the troposphere. 90) 91) 92) 93)
The MWR instrument is comprised of the following part elements: antenna assembly, REU (Radiometer Electronics Units), the main structure and the thermal control hardware. Both K-band and Ka-band channels are fully redundant, except for the antenna assembly, with cold redundancy without cross-strapping.
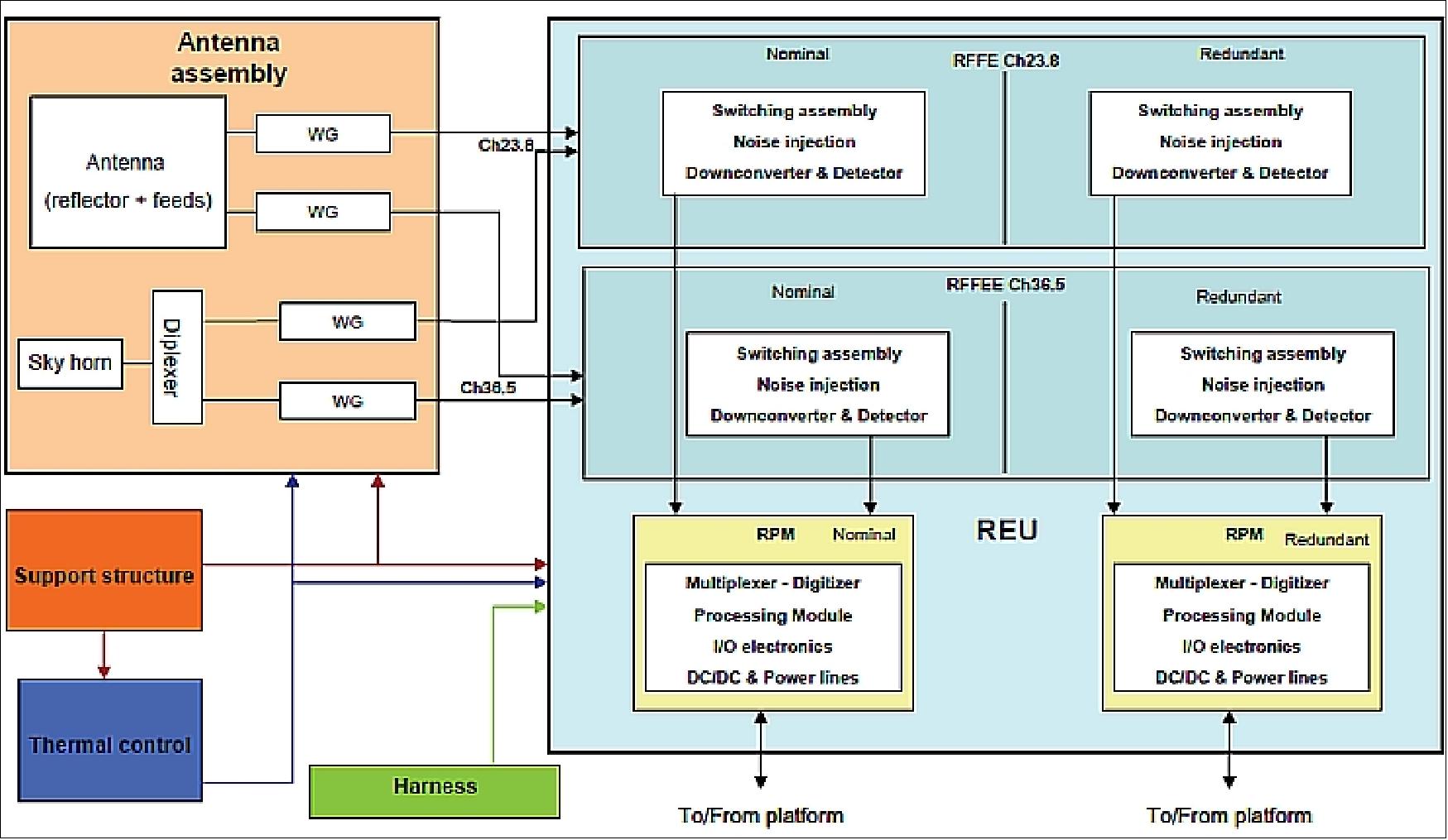
Center frequency, bandwidth | 23.8 GHz, 200 MHz | 36.5 GHz, 200 MHz |
Center frequency stability | 180 kHz/ºC | 220 kHz/ºC |
Radiometric performance | Accuracy: < 3K | Accuracy: < 3K |
Beam efficiency (2.5 HPBW) | 94.1% | 96.0% |
Antenna footprint diameter (average HPBW) | 23.5 km | 18.5 km |
Calibration cycle | ~ 1 / hour | |
Dicke frequency | 78.5 Hz (nominal, programmable within 76-80 Hz range) | |
Integration time | 152.88 ms (nominal, within 150-157.9 ms range) | |
Dynamic range | 2.7 K to 320 K (radiometric performance guaranteed at 150 K - 313 K range) | |
Side-lobe level (SLL) | < -36 dB | < -45 dB |
Antenna beam pointing | Along-track: 1.98 | Along-track: 1.93º |
Main antenna diameter | 60 cm | |
Instrument mass, power consumption | ~24.2 kg, operation = 26 W, safe = 20 W | |
Conceptually, the MWR is a balanced Dicke radiometer for brightness temperatures below the Dicke load temperature. The balancing is achieved by means of a noise injection circuit. For brightness temperatures higher that the Dicke load temperature a conventional Dicke mode is used. The radiometer employs a single offset reflector of 60 cm in diameter and two separate feeds for the two channels. Calibration is achieved through a dedicated horn antenna pointing at the cold sky.
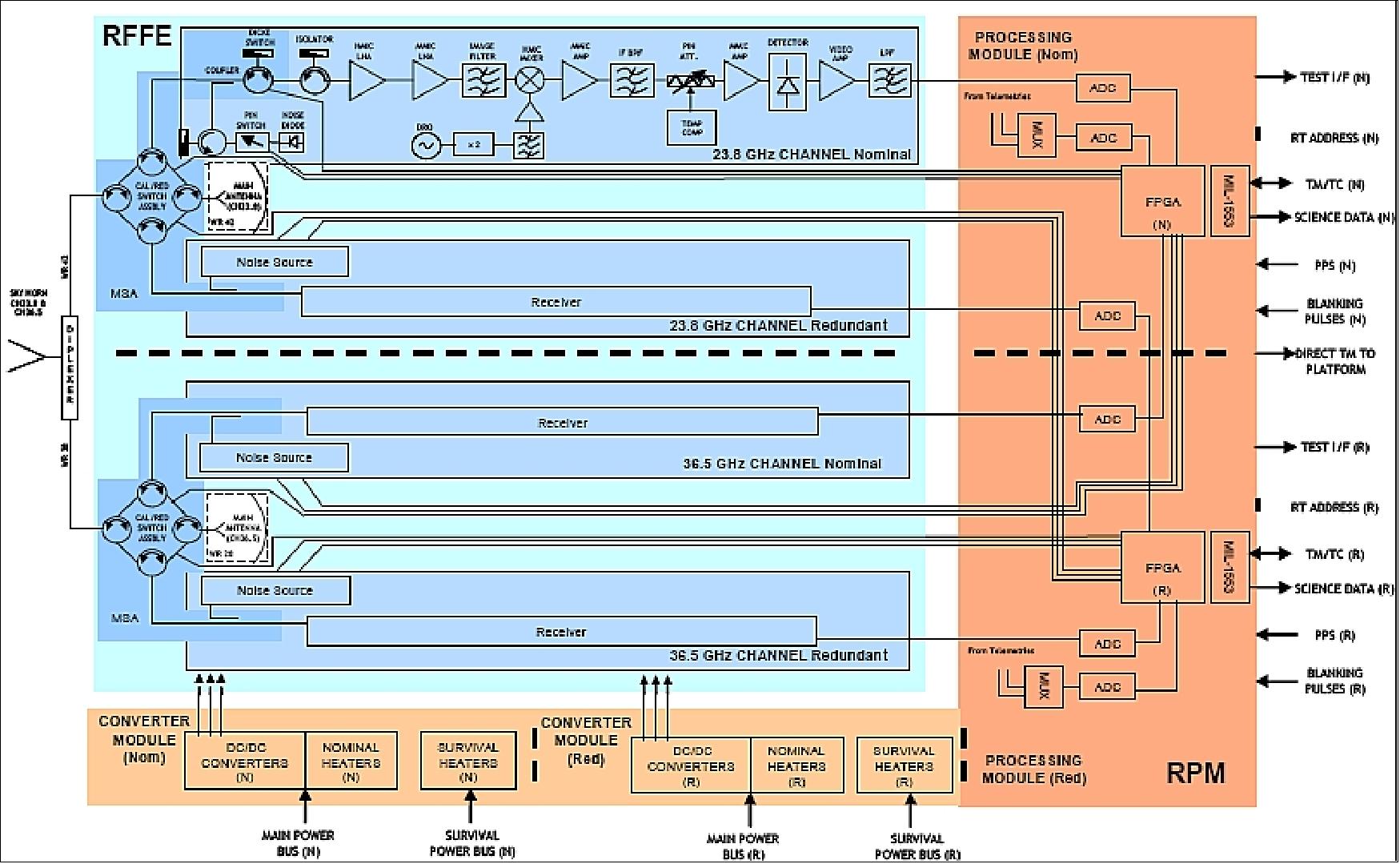
The REU (Radiometer Electronics Unit) consists of the RFFE (Radio Frequency Front End) and the RPM (Radiometer Processing Module). The RFFE is located as close as possible to the measurement feeds to optimize the length of the waveguides and thus the radiometric performance. It contains the amplifiers, switches (calibration and redundancy) and other performance determining elements. The RPM contains the thermal control, the RFFE control, the noise injection loop, the power supplies (also for the RFFE) and provides the electronic interface to the platform. The REU includes a mode to blank the receiver inputs when the radar altimeter emits its pulses to avoid potential disturbances. This mode is accessible by ground commands.
Antenna assembly: The antenna assembly consists of the main nadir-looking reflector that has a diameter of 60 cm, the two measurement feeds and a calibration feed-horn, also known as sky horn. The main antenna is a single offset reflector fed by one horn for each channel. The calibration antenna is based on a wide band single corrugated horn and a frequency diplexer. Both antennae receive a single linear polarization and their signals are routed towards the receivers by means of separate waveguides.
The antenna assembly receives the noise temperature emitted by the objects within the antenna field of view. Discrimination between the different measurement frequencies is done by using different feed horns, each covering a separate frequency band. A separate sky measurement is provided by means of a dedicated sky horn. In this way, the satellite can continue the regular nadir measurements without the need of any maneuvers to turn over the satellite to look at the cold sky. The different frequencies received in the sky horn, are separated by a wave guide diplexer. The signals received by the feeds are guided towards the receiver electronics by means of waveguides. The physical temperatures of the different sections of the antenna assembly are measured and sent to the RPM (Radiometer Processing Module) of the REU.
The RFFE (Radio Frequency Front End) is manufactured by Thales Alenia Space Italia (TAS-I) and is implemented in a very compact design of 200 mm x 290 mm x 120 mm, a total mass of 5 kg, and 10 W power consumption.. Each RFFE channel holds a MSA (Microwave Switching Assembly), a redundant receiver (Rx) and a NS (Noise Source). The RPM is comprised of the FPGA-based radiometer control and acquisition and the DC/DC converters. It provides the electrical interface of the MWR to the Sentinel-3 SMU.
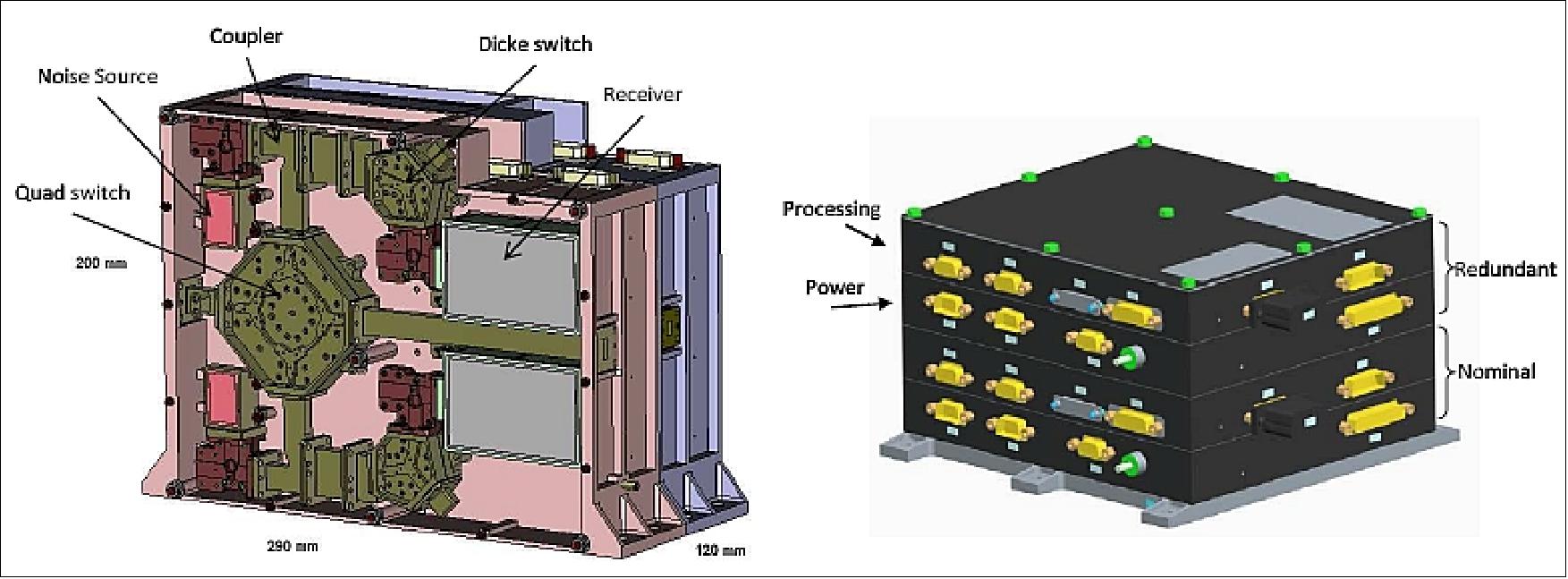
The MSA includes the Quad-switch, made of 4 ferrite switches, which is in charge of the selection of the nominal/redundant and observation/calibration paths. A redundant driver provides the required pulsed current to the switches so that one of the following two states is selected:
1) Nominal → Observation / Redundant → Calibration, or
2) Nominal → Calibration / Redundant → Observation.
The RF part of the Quad-switch is the only non-redundant section of the RFFE, but its reliability is estimated to be better than 0.99924 (11.56 FIT). The MSA is completed with a waveguide coupler for the noise injection and the Dicke switch with a 25 dB matched load. Measurements data from the EQM model shows a remarkable performance in terms of return loss (> 25 dB), isolation (> 40 dB) and insertion loss (< 1 dB) for the MSA, with switching times lower than 2.5 µs and low power consumption.
The NS contains a single noise diode and two cascaded PIN switches, providing high isolation (> 80 dB) in the off state. Additional attenuators are included inside the NS to tune the ENR (Excess Noise Ratio) at the output of the Dicke switch to be around 0 dB. Fine tuning can be also achieved by adjusting the current to the noise diode. The Rx is a superheterodyne receiver; its first element is the LNA, which provides low noise figure and permits good instrument sensitivity even with a SSB (Single Side-Band) architecture. The RF signal is down-converted to an intermediate frequency of 2.5 GHz, which is common to both frequency modules. The local oscillator is based on an X-band DRO and frequency multiplier, while the bandwidth selection is achieved by means of a microstrip band-pass filter centered at the IF frequency. A distributed Rx gain of some 65 dB allows the input noise power to be detected through linear behavior of all Rx components. The square law detector diode is followed by a 4th order Butterworth filter with a cut-off frequency of 50 kHz. The LPF is optimized taking into account the sampling frequency of the ADC (100 kHz) and the offset produced in the retrieval of Ta when the filter’s group delay is increased.
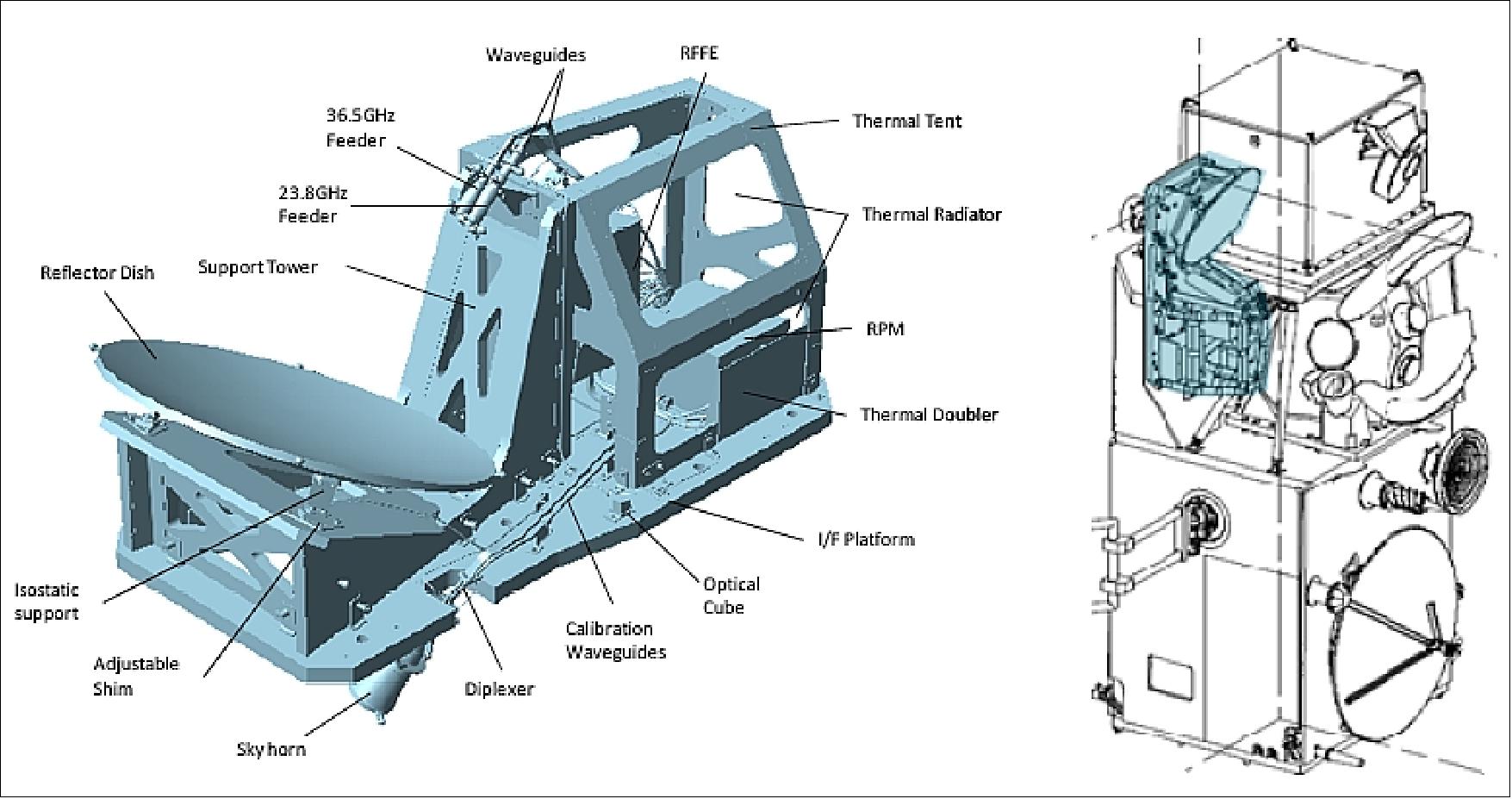
Instrument operation: The MWR is a digitally controlled NIR (Noise Injection Radiometer) instrument. It measures the brightness temperature of the observed scene (the surface of the Earth through the atmosphere, as the instrument is pointing to nadir in its nominal attitude). The noise captured by the RF receiver at both operating frequencies (23.8 and 36.5 GHz) is compared to a very stable Dicke load. This load produces a noise power equivalent to its physical temperature, which is precisely known, and to the receiver bandwidth. The NIR principle reduces the effect of receiver gain and offset instabilities and has successfully been implemented in the frame of the SMOS mission. Every Dicke period is divided into three phases (Figure 102):
- The first half of the Dicke cycle contains two phases: First, a precisely known noise contribution is added to the scene measurement. Second, only the noise power from the scene is received.
- During the second half of the Dicke cycle the noise of the Dicke load is measured.
The working principle is based on the balance between the total amount of power received in the first and second half of the Dicke cycle. This is achieved by varying the duty cycle of the noise injection during the first half of the Dicke cycle. - Then, the injected pulse length is integrated along several Dicke cycles. With this approach, the performance of the instrument is independent of variations of the receiver gain, as all its contributions are cancelled in the balancing process. As a result, the brightness temperature captured by the antenna (Ta) can be derived from known parameters:
Ta = Tref - η Tn (1)
Tref being the physical temperature of the Dicke load, Tn the temperature of the noise injected into the system, and η the length of the noise injection (normalized to half a Dicke cycle; equation (1) means that noise has been injected during the whole first half of the Dicke cycle). Equation (1) can only be used in case Ta is below Tref. If this condition is not met (for very hot scenes, or for a cold receiver), the instrument loses its balanced condition and works in a DNB (Dicke Non-Balanced) mode, in which η goes to 0 and the antenna temperature is retrieved from voltage difference (Ve) between the power integration of the first and the second half of the Dicke cycle:
Ve = G x (Ta-Tref) ⇒ Ta = Ve/G + Tref (2)
where G is the gain of the receiver that is also periodically calibrated. Equations (1) and (2) are the so-called NIR and DNB equations. Both η and Ve are integrated over 12 Dicke cycles, and then included in the science TM packets.
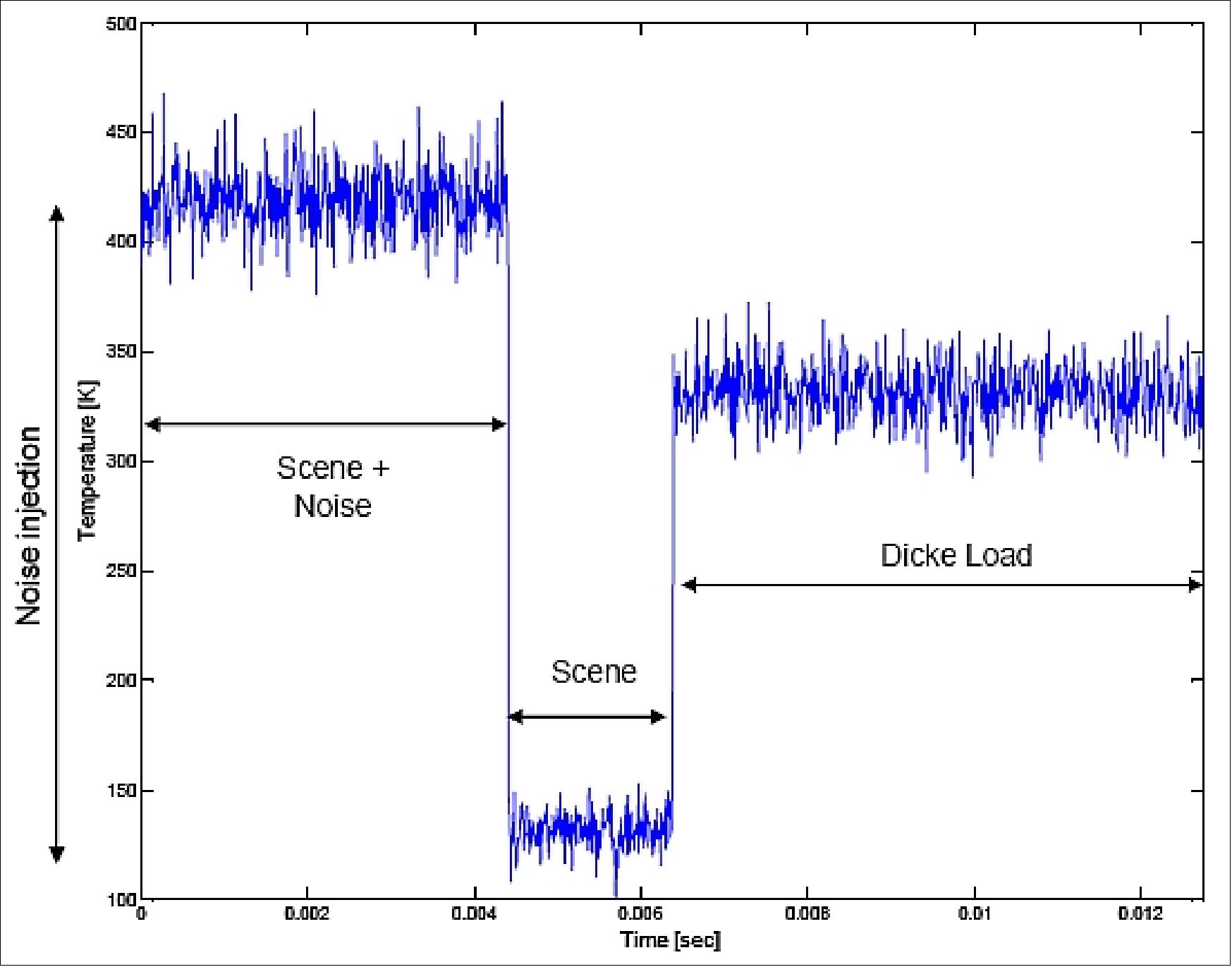
GNSS (Global Navigation Satellite System) Receiver
A dual-frequency instrument based on GPS constellation - and optionally on Galileo. The objective is to provide data for precise orbit determination (POD), established after ground processing. In addition, the GNSS receiver will provide real-time navigation bulletins periodically, as required by the open loop tracking mode of the altimeter, with an accuracy of about 3 m rms. This information is used to control SRAL's open-loop tracking and for Sentinel-3 navigation. Ground processing yields the altitude to an accuracy of < 8 cm within 3 hours for operational applications, and 2 cm after some days of refinement.
The 11 kg GNSS receiver can track up to 12 satellites at the same time. The signals transmitted by the navigation satellites are also disturbed by the ionosphere. The effect is corrected by comparing two signals at different frequencies within 1160-1590 MHz.
LRR (Laser Retroreflector)
LRR is a passive device, composed of a set of corner cubes (mass of 1 kg). The LRR is mounted on the Earth panel of the spacecraft. Its purpose is to enable the accurate localization of the satellite from the ground, through laser ranging techniques. A network of laser ground stations (SLR) will be used for this purpose and their measurements will contribute to refining and validating the POD solutions derived from GNSS data.
Ground Segment
The main objective of the Sentinel-3 mission is the provision of ocean observation data in routine, long term and continuous fashion with a consistent quality and a very high level of availability. In addition, the mission will be designed to generate land optical observation products, ice topography, vegetation and land hydrology products. The different elements composing the Sentinel-3 system and the related interfaces for the provision of the operational marine and land services are shown Figure 105. 94)
In the frame of the Cooperation Agreement on the GMES space component, ESA and EUMETSAT have established a specific implementing arrangement concerning the cooperation on Sentinel-3. On this basis, following completion of spacecraft in-orbit commissioning, EUMETSAT will be responsible for the operation of the mission covering the products for the marine user community and the monitoring and control of the spacecraft in routine phase.
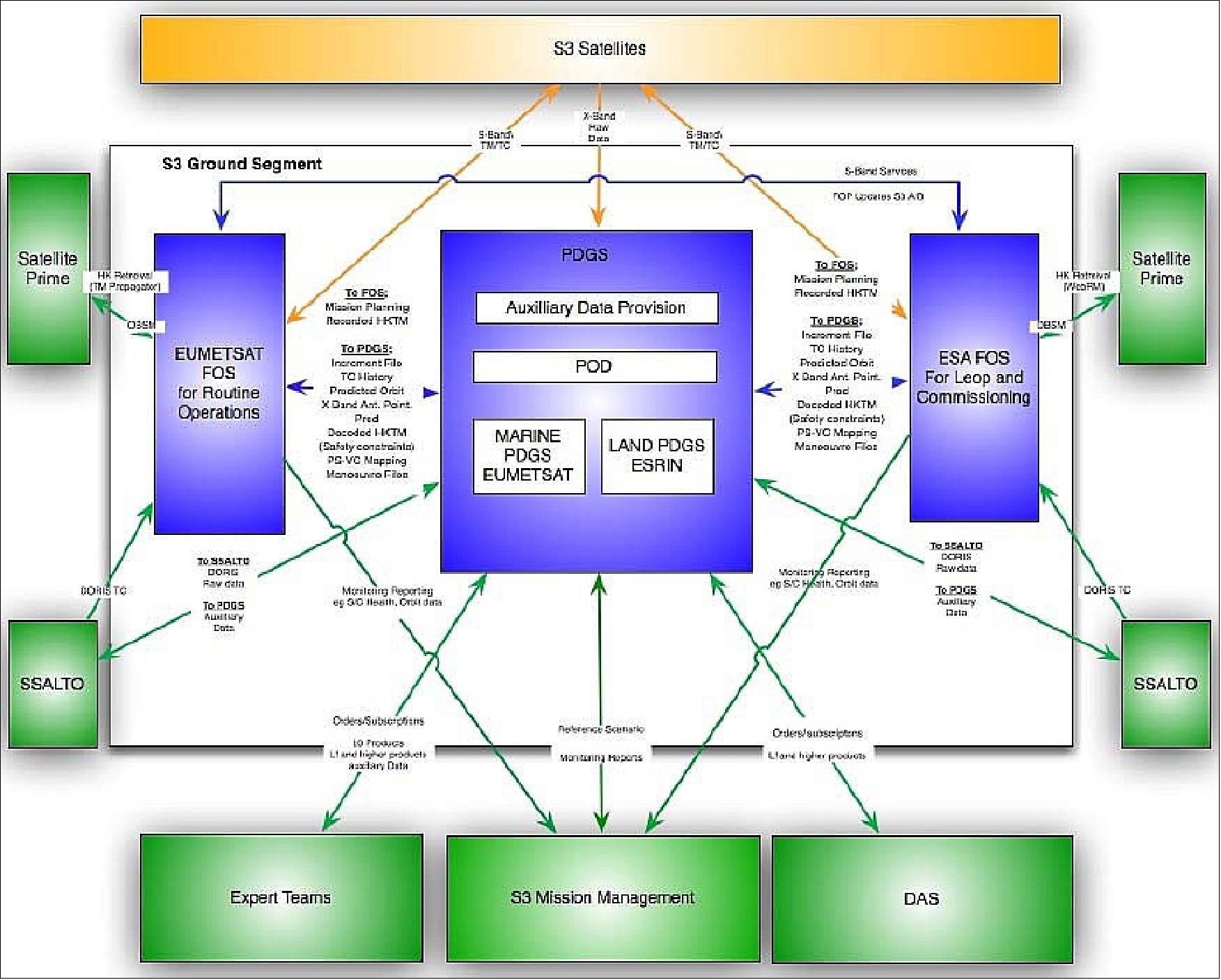
The GMES Sentinel-3 ground segment is in charge of the overall commanding and monitoring of the spacecraft constellation (2 S/C) as well as the acquisition, processing and dissemination of their observational data. The two primary components of the ground segment are the FOS (Flight Operation System) and the PDGS (Payload Data Ground Segment).
The different elements composing the Sentinel-3 system and the related interfaces for the provision of the operational marine and land services include (Figure 105) :
• The Sentinel-3 satellite(s), which produce and downlink the observation data
• The Sentinel-3 Ground Segment, which acquires the observation data and produce the operational products
• Interfaces to:
- The S3-Mission Management charged with the overall responsibility for the routine mission of the Sentinel-3 system
- DAS (Data Access Ground Segment) as the gateway between the users and the Sentinel-3 Ground Segment. The DAS forwards users’ requests to the PDGS and delivers the related data products generated by the PDGS. The DAS is capable to manage users’s communities, providing access to different classes of Users, with different priorities, specific rules, access privilege and security limitations
- SSALTO (Segment Sol multimissions d'ALTimétrie, d'Orbitographie et de localisation précise) operated under responsibility of CNES. SSALTO is a multi-mission ground segment which interfaces with the FOS to provide command information for DORIS and it will interface PDGS to receive DORIS mission raw data and to provide auxiliary data for PDGS POD (Precise Orbit Determination)
- Expert Teams as a privileged set of users which support the Satellite Commissioning phase and for this reason interface with the PDGS.
FOS (Flight Operation System)
The FOS main responsibility encompasses the spacecraft monitoring and control, including execution of all platform activities and the commanding of the payload schedules.
• The Ground Station and Communications Network performing telemetry, telecommand and tracking operations within the S-band frequency. The S-band ground station used throughout all mission phases will be the ESA Kiruna terminal (complemented by the Svalbard and Troll as backup stations).
• FOCC (Flight Operations Control Center), including:
- The Mission Control System, supporting hardware and software Telecommand coding and transfer, HKTM (Housekeeping Telemetry) data archiving and processing tasks essential for controlling the mission, as well as all FOCC external interfaces
- The Mission Planning System (part of the Mission Control System), supporting command request handling and the planning and scheduling of spacecraft/payload operations
- The Spacecraft Simulator, supporting procedure validation, operator training and the simulation campaign before each major phase of the missions
- The Flight Dynamics System, supporting all activities related to attitude and orbit determination and prediction, preparation of slew and orbit maneuvers, spacecraft dynamics evaluation and navigation.
• A General Purpose Communication Network, providing the services for exchanging data with any other external system during all mission phases.
Two instances of the FOS exist in the Sentinel-3 system. Up to end of commissioning of the space segment (i.e. launch+5 months), the FOS instance based at ESA/ESOC is responsible for flight operations, following hand-over the responsibility for flight operations will be with the FOS instance based at EUMETSAT.
To optimize the use of resources, reduce the development risk, and to meet the challenging schedule, it has been agreed to adopt a specific cooperation approach in relation to the FOS implementation, IVV (Integration, Verification and Validation) and operations. The concept relies on:
- The use of the same facilities for the FOS main components, including Mission Control System, Spacecraft Simulator, Flight Dynamics specific modules
- The development under a Joint Team of common Operations Preparation (OPSPREP) products, including Flight Operations Procedures and Spacecraft Operations Database
- The provision by ESA/ESOC of specific services to EUMETSAT, including the TT&C ground stations, the back-up Control Center, the debris collision prediction, and operations support during all mission phases.
During all mission phases, ESA/ESOC will provide a set of specific services in support of the EUMETSAT FOS. This includes the use of the S-band ground station passes needed for satellite control. This service will rely on the ESTRACK Kiruna site as primary station, with Svalbard and Troll acting as back-up in support of contingency or special operations. The baseline is that two S-band passes per day are provided to EUMETSAT, which is compatible with the Sentinels operations concept. The S-band Services will cover a mechanism for provision of additional S-band passes upon EUMETSAT request.
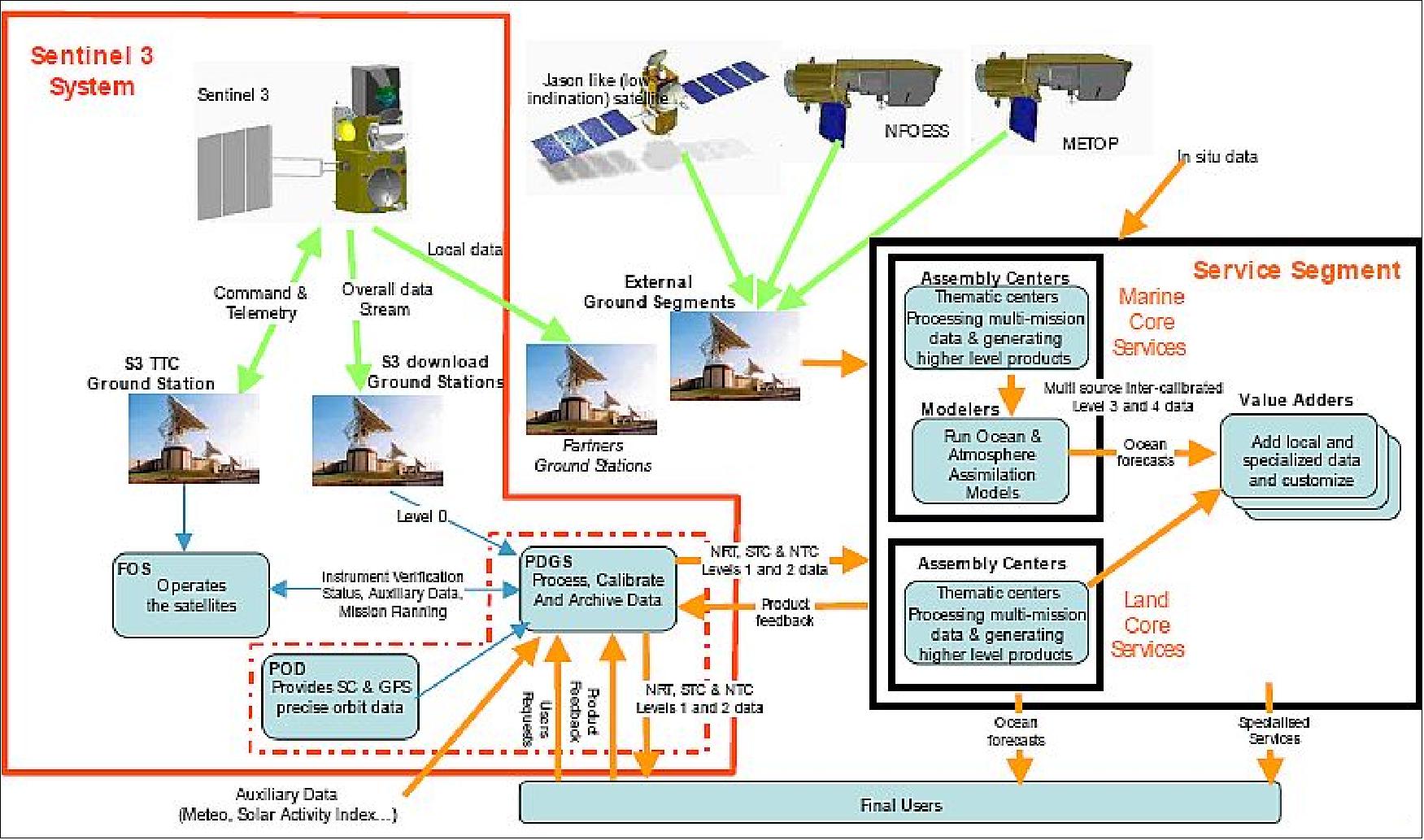
PDGS (Payload Data Ground Segment)
The access to the Sentinel data will be provided through a dedicated Ground Segment infrastructure where the PDGS is one building block. For Sentinel 3, this is currently implemented by ESA in conjunction with EUMETSAT. TelespazioVega Deutschland is leading the Core PDGS implementation, with ACS, Werum, and Telespazio Italy as partners. 95)
The PDGS is primarily in charge of receiving and processing the Sentinel-3 instrument payload data, including HKTM data; ensuring that satellite tasking is performed according to the overall GMES user requirements and satellite capabilities; guaranteeing that suitable Sentinel-3 products meeting the expected quality and timeliness constraints are available to the GMES Users; and of all necessary support activities.
For the Sentinel 3 mission, the following product delivery timeliness are foreseen:
• NRT (Near Real Time) products made available to the users in less than 3 hours after sensing.
• STC (Short Time Critical) products made available to the users in less than 48 hours after sensing.
• NTC (Non-Time Critical) products made available less than 1 month after sensing.
As per mission requirements and on-board instruments, the processing is broadly grouped into Land data processing and Marine data processing.
Distributed Centers: The Sentinel-3 PDGS functions are distributed across a number of centers and locations, as illustrated in Figure 107.
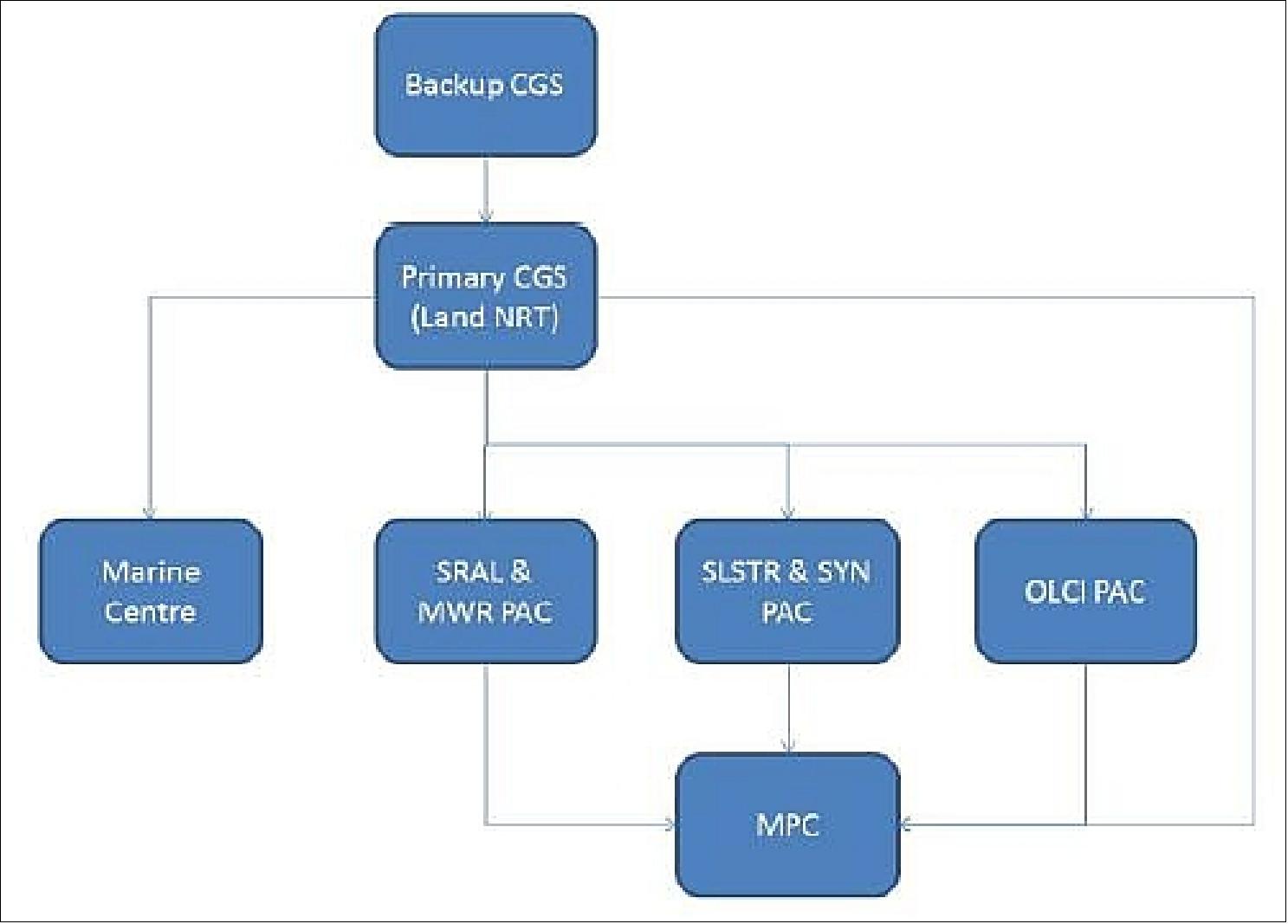
• A primary CGS (Core Ground Station) at Svalbard, providing X–band service, and where the acquisition and ingestion function is deployed, together with the NRT processing chains for the Land products.
• A backup CGS that provides a backup X-band service covering for planned unavailability of the prime CGS X-band service.
• A Land PAC (Processing and Archiving Center) for the NTC production of the OLCI products.
• A Land PAC for the STC/NTC production of the SRAL and MWR products.
• A MPC (Mission Performance Center) hosting the Mission Performance Monitoring function for Land products
• A Marine Center, hosting the NRT and STC/NTC production for all Marine products, as well as their own Mission Performance Monitoring function.
Specific platforms are deployed at the centers to support different activities: operational platform for the routine operations, reference platform for validation, reprocessing platform to support reprocessing campaigns, and development platforms to support maintenance and evolution of the system.
Automation: The Sentinel-3 PDGS operational concept is driven by the requirement of largely automated operation with no routine manual interaction required for nominal processing. All PDGS elements are autonomously running in nominal operations during time periods where an operator is not available. This is achieved by:
• a data driven approach implemented across the whole PDGS, whereby software components are activated on the availability of the data they require as input
• machine-to-machine interfaces between components for propagating configuration and workflow changes.
For the routine operation (i.e. systematic processing, circulation, archiving, etc.), immediate operator intervention is only required in case of critical failures, that are identified by the monitoring component. A notification-based approach allows the system to execute the nominal workflows based on the availability or change of input data without explicit user intervention.
Nominal operations are completely automatic and can be managed without operator intervention.
NRT (Near Real Time) system: One of the key requirements driving the design of the Sentinel-3 PDGS is the capability to acquire, process, and make the data available to the users in Near Real Time, i.e. within 3 hours from sensing.
In the Sentinel-3 mission all the data downlinked by the satellite is processed in near real time, producing a complete set of Level 0, Level 1 and Level 2 products. Level 1 and Level 2 products are directly accessible by the end users, while the access to the Level 0 products is limited to special users.
The deployment of components across different ground stations adds a constraint to the architecture, as:
• Raw data is acquired in the CGS Center
• Land NRT products are processed in the CGS Center
• Marine NRT products are processed in the Marine PDGS Center, starting from the same raw data used in the Land case.
In order to cope with the NRT timeliness requirements and the processing deployment constraints, the design of the acquisition and ingestion functionality has been built focussing on two key concepts:
• data "granules" pipelined processing
• NRT data circulation.
According to the mission requirements, the data flowing from the satellites to the acquisition ground stations is not processed as a single monolithic entity after the completion of the passes. The chosen approach has been to divide the input data stream in size-optimized granules while the acquisition is on- going.
Marine Center: The Marine Center implements the processing, archiving, and dissemination for all marine products and all levels of processing, for NRT as well as NTC/STC timeliness. It relies on the following functions:
The Processing function applies all the necessary data processing levels, starting from the reconstructed payload science data (Instrument Source Packets) to produce Level 0 to the algorithms and formatting techniques to generate higher level products. The processing function is capable of producing the desired products in a systematic way. It is essentially composed of a processing management layer, controlling the data processors required for each level of processing and each timeliness.
The Long Term and Short Term Archives ensure the long-term and short-term storage of the payload data products and of the auxiliary data according to the longterm/short-term storage policy. These functions include all operations to be put in place to store and to circulate the data within the PDGS and to ensure their integrity according to the applicable requirements. They also include the inventory (at the appropriate level) of the stored data to enable their retrieval by the PDGS for internal purposes and by the PDGS users.
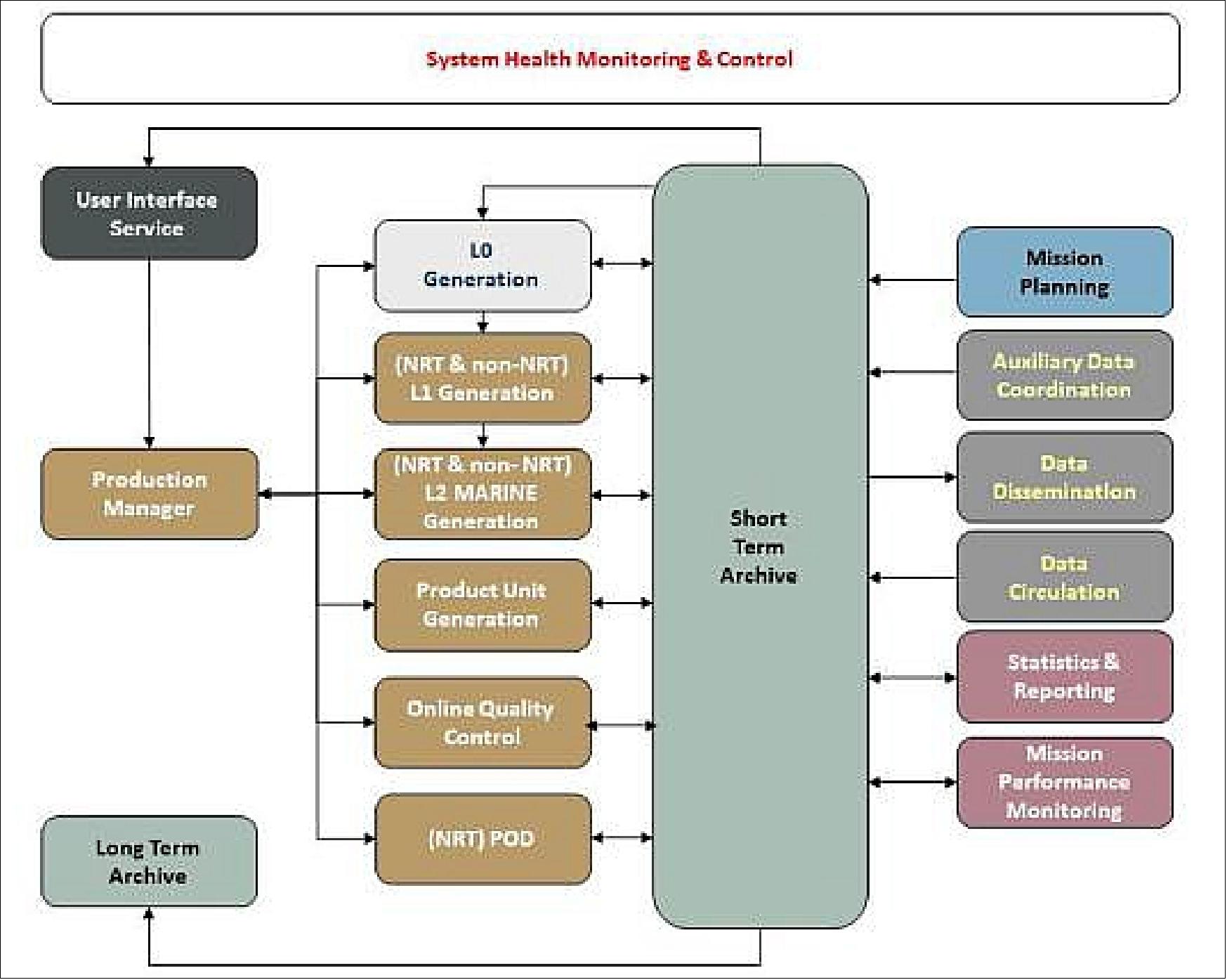
EUMETCast is the EUMETSAT generic multi-mission dissemination system based on the standard DVB-S (Digital Video Broadcast-Satellite) multicast technology. EUMETCast is the main dissemination mechanism for distribution of data to EUMETSAT’s end users (Ref. 95).
Sen3Exp (Sentinel-3 Experiment) Campaign
ESA conducted the Sen3Exp airborne campaign in June and July 2009. The campaign started in Barrax, La Mancha, Spain. An aircraft operated by the Spanish National Institute for Aerospace Technology (INTA), equipped with three hyperspectral imaging spectrometers, made two flights over the area. Meanwhile, satellite data were acquired by Envisat’s MERIS and AATSR instrument and by the CHRIS (Compact High Resolution Imaging Spectrometer) instrument aboard ESA’s PROBA-1 satellite. At the same time, ground teams, under the direction of Prof. Jose Moreno from the University of Valencia, made atmospheric radiometric and biophysical measurements. 96)

Legend to Figure 109: Hyperspectral imaging spectrometers were installed on board INTA’s CASA-212-200 aircraft in support of the Sen3Exp airborne campaign. The AHS (Airborne Hyperspectral System) occupies the left-hand port; the CASI-1500i (Compact Airborne Spectrographic Imager) on the left and the SASI-600 (Shortwave Infrared Airborne Spectrographic Imager) occupy the right-hand port.
The campaign then moved to Pisa in Italy, from where a pine forest at San Rossore could be reached. At San Rossore, Prof. Federico Magnani from the University of Bologna oversaw the week-long ground measurement program. The dataset was again complemented with MERIS, AATSR and CHRIS satellite data.
In July, activities focused on the marine environment where measurements were taken at two oceanic sites: the Boussole monitoring buoy in the Ligurian Sea and the Aqua Alta Oceanographic Tower (AAOT) in the Adriatic Sea, close to Venice. Both sites have played an important role in supporting ocean color algorithm development and product validation for many years.

Boussole typifies the global ocean, where the measured signal is determined solely by the absorption of phytoplankton. AAOT is in an area where there is both open ocean water and also water that is optically complex because phytoplankton, suspended sediments and colored dissolved organic matter also affect the measured signal. Such water can be found in all coastal regions and represents a challenge to analyze and interpret the data from spaceborne measurements.
A unique, comprehensive and valuable dataset has been created that will significantly support the development of the Sentinel-3 mission.
Permanent Calibration Station for Altimeters in Crete with Microwave Transponder
The Technical University of Crete (TUC) is installing a new permanent microwave transponder ground infrastructure on the Island of Crete, Greece, to serve as an alternative and independent technique for the calibration of, mainly, European altimetric missions. The facility was initially planned as a calibration site for the Sentinel-3 in the south west of Crete, Greece, using the developed transponder. However, this ground infrastructure, along with other permanent facilities in Crete, may also be used for the calibration of other Ku-band altimetric missions such Jason-2, Cryosat-2, etc. 97)
The idea for incorporating land based transponders was initially introduced in 2000. 98) A microwave transponder is an electronic equipment which receives the pulsed radar signal, transmitted by the altimeter of the over-passing satellite and actively amplifies and retransmits the signal towards the spacecraft, where it is recorded. The time delay of the signal is measured, from which the absolute range between the transponder and the satellite can be deduced. The main advantage of this technique, compared to the conventional sea-surface calibration, stands for the fact that no ocean dynamics errors are involved in satellite altimeter’s calibration.
However, in the past, only few transponders have been built and implemented for this reason. The ESA premises in Svalbard, Norway host a transponder developed by RAL, UK in 1987 that has been used mainly for the Cryosat-2 calibration. The Gavdos Island Cal/Val facility in Greece hosted the Austrian Academy of Sciences transponder and that transponder has been effectively used for the calibration of Envisat and Jason-2 missions. There has been another transponder placed in Rome, Italy which was used for the Envisat sigma-0 calibration.
TUC Transponder
In 2011, the Geodesy and Geomatics Engineering Laboratory at the Technical University of Crete in Greece developed a new Ku-band microwave transponder. The TUC transponder is mobile, allowing calibration at different locations but also modular for operating in other frequencies, provided that some parts are modified. It is capable of recording the incoming and outgoing signals, while it can be controlled and operated remotely. The transponder frequency has been selected to be compatible with past, current and future European as well as international altimetry missions that operate in this microwave range (i.e., Jason series, Cryosat-2, Sentinel-3). Additionally, it is equipped with a GPS (Global Navigation Satellite System) receiver and appropriate meteorological sensors to provide precise time-tagging, as well as the atmospheric delay corrections during transponder calibration. This is of importance for the accurate determination of the altimetric range because the atmosphere affects the altimetric measurements. Furthermore, this prototype transponder is the only microwave transponder that incorporates circularly polarized antennas. The latter, allows performing calibration experiments on different satellite missions at the same location, approaching from different directions, providing that the satellite ground track is in a range of 3-5 km away from the transponder location.
Parameter | Specification |
Frequency, bandwidth | 13.575 GHz, 350 MHz |
Gain stability | 0.5 dB |
Receiver noise figure | < 8 dB |
Internal electronics gain | 0.5 dB |
Antenna diameter | 90 cm |
The TUC transponder has been characterized for 4 months (March-July 2012) at the CPTR (Compact Payload Test Range) facilities in ESA/ESTEC, the Netherlands.
The transponder has already been used for the calibration of several Cryosat-2 passes (10-May, 8-June and 3-August 2013) over the SLR2 (Satellite Laser Ranging 2) site (35° 32.084' N, 24° 04.061' E) in North West Crete, Greece, and a clear response has been captured on the satellite’s data (Figure 111).
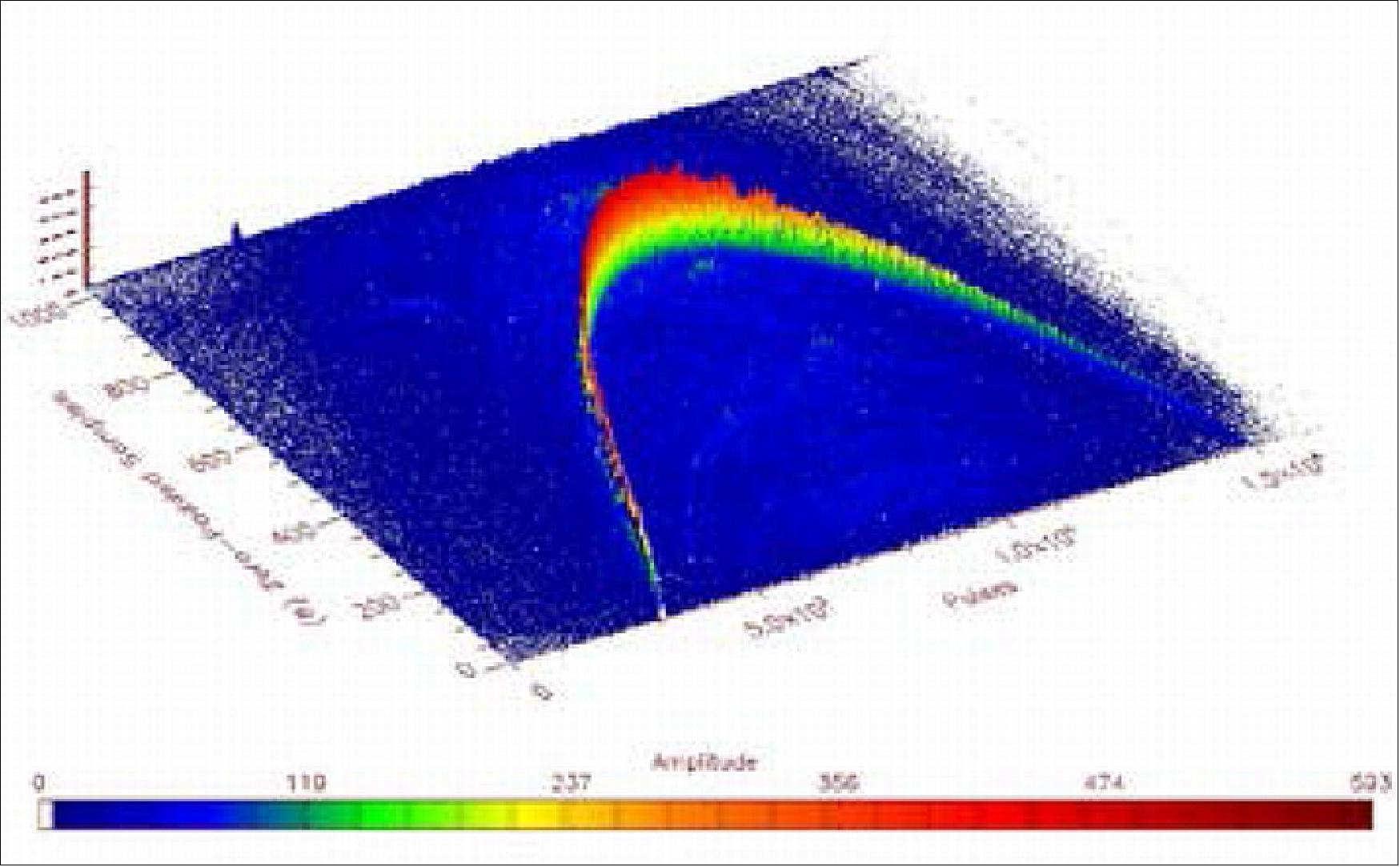
A TUC transponder site has been selected on Crete Island which represents a triple cross-over point between Sentinel-3A, -3B and Jason-2&3 (and also Jason-CS, as it will most likely fly over the same Jason-series tracks). This criterion was used to finally define and freeze the ground tracks for Sentinel-3 mission.
The CDN2 (35° 20.729' N, 23° 46.577'E) site is exactly under Jason, 100 m east of Sentinel-3A and 300 m west of the Sentinel-3B ground tracks. The CNES team will verify the satellite signal observed using Jason-2 around the CDN2 candidate.

The instruments at the CDN2 site will be protected using either weather-proof boxes or a container with appropriate covers to avoid/reduce any satellite echoes by their metallic parts. Figure 113 illustrates an indicative spatial distribution of the necessary and ancillary instrumentation to be constructed at the CDN2 Sentinel-3 altimeter calibration site. Besides the instrumentation and infrastructure, the preparatory steps taken for the establishment of the CDN2 site involve also the development of appropriate software for data archival and transmission and for the determination of the transponder’s precise positioning.
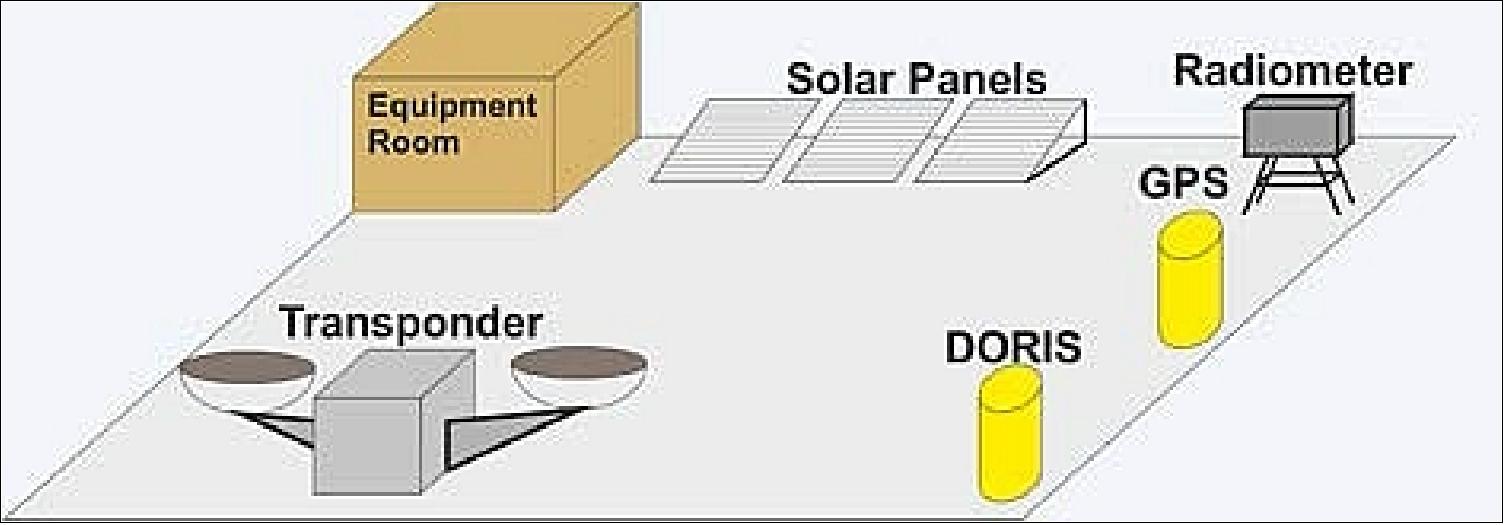
The Sentinel-3 altimeter calibration site is expected to be fully operational in early 2014, that is about one year prior to the Sentinel-3A launch. During this period, calibration campaigns for the Jason-2 and Cryosat-2 altimetry mission will be performed to test the transponder’s operational capabilities in real-field conditions. These campaigns will aim at: a) delivering altimeter calibration values for these satellites, b) getting familiarized with the remote operation procedures to be followed, and 3) identifying potential upgrades necessary for improving the transponder’s performance.
The transponder is to be upgraded, improved, and characterized before its final deployment and support for Sentinel-3A commissioning phase in 2015.
References
1) Mark R. Drinkwater, Helge Rebhan, “Sentinel-3: Mission Requirements Document,” ESA, Feb. 17, 2007, URL: http://esamultimedia.esa.int/docs/GMES/GMES_Sentinel3_MRD_V2.0_update.pdf
2) M. Aguirre, B. Berruti, J.-L. Bezy, M. Drinkwater, F. Heliere, U. Klein, C. Mavrocordatos, P. Silvestrin, B. Greco, J. Benveniste, “Sentinel-3: The Ocean and Medium-Resolution Land Mission for GMES Operational Services,” ESA Bulletin, No 131, Aug. 2007, pp. 24-29, URL: http://www.esa.int/esapub/bulletin/bulletin131/bul131c_aguirre.pdf
3) Y. Baillion, J. J Juillet, F. Paoli, M. Aguirre, B. Berruti, “GMES Sentinel-3: A long-term monitoring of ocean and land to support sustainable development,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B.1.2.04
4) http://www.ioccg.org/sensors/Regner_Sentinel.pdf
5) M. Drinkwater, “GMES Sentinel-3,” EUMETSAT SAF (Satellite Application Facility) Network Workshop, Darmstadt, Germany, Jan. 14-18, 2008, URL: http://www.eumetsat.int/Home/Main/What_We_Do/SAFs/The_Network/groups/pps/documents/document/pdf_saf_snw1_14_2.pdf
6) Mark Drinkwater , Helge Rebhan, Pierre-Yves Le Traon, Laurent Phalippou, David Cotton, Johnny Johannessen, Giulio Ruffini, Mike Bell, Betrand Chapron, Nadia Pinardi, Ian Robinson, Lia Santoleri, Detlef Stammer, “The Roadmap for a GMES Operational Oceanography Mission,” ESA Bulletin No 124, Nov. 2005, pp. 42-48, URL: http://earth.esa.int/workshops/venice06/participants/1219/paper_1219_drinkwater.pdf
7) B. Berruti, C. Mavrocordatos, “GMES Sentinel-3 Mission and Characteristics,” Brussels, Belgium, Dec. 9-10, 2008, URL: http://www.spot-vegetation.com/VGT10YR/PresentationsPDF/1210_15u00_BBerruti_Sentinel3.pdf
8) Peter Regner, “GMES Sentinel-3,” 15th IOCCG (International Ocean-Color Coordinating Group) Committee Meeting, 18-20 January 2010, Rio de Janeiro, Brazil, URL: http://www.ioccg.org/sensors/RegnerSentinel%203_IOCCG-15.pdf
9) http://www.esa.int/esaLP/SEMTST4KXMF_LPgmes_0.html
10) Eleni Paliouras, “The GMES Space Component and Service Support Activities,” Padua, Italy, Sept. 16, 2010, URL: http://www.fp7-space.eu/infoday2010/16/05_Paliouras-ESA_GMES.pdf
11) B. Seitz, C. Mavrocordatos, H. Rebhan, J. Nieke, U. Klein, F. Borde, B. Berruti and the Sentinel-3 team, “The Sentinel-3 Mission Overview,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium) 2010, Honolulu, HI, USA, July 25-30, 2010
12) C. Donlon, B. Berruti, J. Frerick, U. Klein, C. Mavrocordatos, J. Nieke, B. Seitz, J. Stroede, H. Rebhan, P. Goryl, N. Picot, P. Femenias, R. Cullen, “The Sentinel-3 Mission Overview,” Proceedings of the 2011 EUMETSAT Meteorological Satellite Conference, 5-9 September 2011, Oslo, Norway, URL: http://www.eumetsat.int/Home/Main/AboutEUMETSAT/Publications/ConferenceandWorkshopProceedings/2011/groups/cps/documents/document/
pdf_conf_p59_s1_05_donlon_v.pdf
13) Craig Donlon, “Sentinel-3 Mission Requirements Traceability Document (MRTD),” ESA, GMES_Sentinel-3_MRTD_Iss-1_Rev-0-issued.doc, Feb. 7, 2011, URL: http://download.esa.int/docs/EarthObservation/GMES_Sentinel-3_MRTD_Iss-1_Rev-0-issued-signed.pdf
14) “Sentinel-3 - GMES Medium Resolution Land and Ocean Mission,” URL: http://esamultimedia.esa.int/docs/S3-Data_Sheet.pdf
15) “Copernicus: new name for European Earth Observation Programme,” European Commission Press Release, Dec. 12, 2012, URL: http://europa.eu/rapid/press-release_IP-12-1345_en.htm
16) ”Sentinel-3 image,” ESA, released on Jan. 13, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/01/Sentinel-3
17) J. Côté, A. St-Amour, B. Paijmans, A. Kron, J.-L. Beaupellet, J. de Lafontaine, “Attitude and Orbit Control Software: Recent Innovations for Upcoming Missions,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
18) Alain Girard, Antoine Provost-Grellier, Jean Nodet, Philippe Desmet, Patrice Cossard, “Overview of Implementing SpaceWire in Observation Satellites from Thales Alenia Space,” Proceedings of the International SpaceWire Conference 2010, St. Petersburg, Russia, June 22-24, 2010, URL: http://2010.spacewire-conference.org/proceedings/Papers/MissionsApplications/Girard.pdf
19) “ESA preparing ‘sugar-cube’ gyro sensors for future missions,” ESA, Sept. 9, 2009, URL: http://www.esa.int/esaCP/SEMVXYUHYXF_index_0.html
20) “Equipped with solar wing,” ESA, Dec. 4, 2014, URL: http://www.esa.int/spaceinimages/Images/2014/12/Equipped_with_solar_wing
21) ”Building satellites amid COVID-19,” ESA / Applications / Observing the Earth / Copernicus, 04 May 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Copernicus/Building_satellites_amid_COVID-19
22) ”Fuelling Sentinel-3B,” ESA, 13 April 2018, URL: http://m.esa.int/spaceinimages/Images/2018/04/Fuelling_Sentinel-3B
23) ”Sentinel-3B fully tanked,” ESA, 13 April 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Sentinel-3B_fully_tanked
24) ”Sentinel-3B launch preparations in full swing,” ESA, 23 March 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Sentinel-3B_launch_preparations_in_full_swing
25) ”Sentinel-3B good to go,” ESA, 2 Feb. 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Sentinel-3B_good_to_go
26) ”EUMETSAT ground segment is ready for the launch of Copernicus Sentinel-3B,” EUMETSAT, 5 December 2017, URL: [web source no longer available]
27) ”The heat is on for Sentinel-3B,” ESA, June 1, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/The_heat_is_on_for_Sentinel-3B
28) ”Rise and shine for Sentinel-3A,” ESA, Jan. 14, 2016, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Rise_and_shine_for_Sentinel-3A
29) ”Sentinel-3A on its way,” ESA, Nov. 20, 2016, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3A_on_its_way
30) ”Sentinel-3A shows off,” ESA, Oct. 15, 2015, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3A_shows_off
31) “Sentinel-3 fully formed,” ESA, Dec. 4, 2014, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3_fully_formed
32) ”Third Sentinel satellite launched for Copernicus,” ESA, Feb. 16, 2016, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Third_Sentinel_satellite_launched_for_Copernicus
33) ”Rockot orbits European Copernicus Satellite Sentinel-3A successfully,” Eurockot Launch Services, Feb. 16, 2016, URL: http://www.eurockot.com/2016/02/rockot-orbits-european-copernicus-satellite-sentinel-3a-successfully/
34) “Rockot to launch two Sentinel satellites,” ESA, Feb. 9, 2012, URL: http://www.esa.int/esaCP/SEM7MMVX7YG_index_0.html
35) J. Roselló Guasch, P. Silvestrin, M. Aguirre, L. Massotti, “Navigation needs for ESA’s Earth Observation missions,” Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7-1401
36) ”Seventh Sentinel satellite launched for Copernicus,” ESA, 25 April 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Copernicus/Sentinel-3/Seventh_Sentinel_satellite_launched_for_Copernicus
37) Stephen Clark, ”Rockot Sentinel 2B, ” Spaceflight Now, URL: https://spaceflightnow.com/launch-schedule/
38) C. Dolon, ”Satellite Sea Surface Temperature –current and future observations at ESAC,” Workshop on observations and analysis of sea-surface temperature and sea ice for NWP and Climate Applications, ECMWF, Reading UK, 22-25 January 2018, URL: https://www.ecmwf.int/sites/default/files/elibrary/2018/17966-satellite-sea-surface-temperature-current-and-future-observations-esa.pdf
39) ”Feeling the heat from space,” ESA Applications, 20 July 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Feeling_the_heat_from_space
40) ”Earth from Space: Patagonia,” ESA Applications, 01 July 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Earth_from_Space_Patagonia
41) ”Historic Greenland ice sheet rainfall unravelled,” ESA Applications, 25 May 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Historic_Greenland_ice_sheet_rainfall_unravelled
42) ”Heatwave across India,” ESA Applications, 29 April 2022, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_25-29_April_2022
43) ”Earth from Space: Scandinavian Peninsula,” ESA Applications, 15 April 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Earth_from_Space_Scandinavian_Peninsula
44) ”Mega iceberg released 152 billion tonnes of freshwater,” ESA Applications, 20 January 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/Mega_iceberg_released_152_billion_tonnes_of_freshwater
45) A. Braakmann-Folgmann, A. Shepher, L. Gerrish, J. Izzard, A. Ridout, ”Observing the disintegration of the A68A iceberg from space,” Remote Sensing of Environment, Volume 270, 1 March 2022, 112855, https://doi.org/10.1016/j.rse.2021.112855
46) ”Mediterranean continues to bake,” ESA Applications, 3 August 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/08/Mediterranean_continues_to_bake
47) ”Smoke billows from fires in Turkey,” ESA Applications, 2 August 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/08/Smoke_billows_from_fires_in_Turkey
48) ”New satellite data techniques reveal coastal sea-level rise,” ESA Applications, 07 July 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/New_satellite_data_techniques_reveal_coastal_sea-level_rise
49) ”Mediterranean heatwave,” ESA Applications, 2 July 2021, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_28_June_-_02_July_2021
50) ”Canada–US heatwave,” ESA Applications, 01 July 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/07/Canada_US_heatwave
51) ”Earth from Space: The Great Lakes,” ESA Applications, 28 May 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Earth_from_Space_The_Great_Lakes
52) ”Satellites highlight a 30-year rise in ocean acidification,” ESA Applications, 21 April 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-3/Satellites_highlight_a_30-year_rise_in_ocean_acidification
53) Luke Gregor and Nicolas Gruber, ”OceanSODA-ETHZ: a global gridded data set of the surface ocean carbonate system for seasonal to decadal studies of ocean acidification,” Earth System Science Data, Volume 13, pp: 777-808, Published: 02 Mar 2021, https://essd.copernicus.org/articles/13/777/2021/essd-13-777-2021.html
54) ”Netherlands in white,” ESA Applications, 11 February 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/02/Netherlands_in_white
55) ”Spain’s chilly blanket,” ESA Applications, 13 January 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/01/Spain_s_chilly_blanket
56) ”Giant A-68A iceberg loses chunk of ice,” ESA Applications, 18 December 2020, URL: https://www.esa.int/Applications/Observing_the_Earth/Giant_A-68A_iceberg_loses_chunk_of_ice
57) ”Mountains of snow,” ESA Applications, 17 December 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/12/Mountains_of_snow
58) ”Republic of Maldives,” ESA Applications, 30 October 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/10/Republic_of_Maldives
59) ”Ganges Delta,” ESA Applications, 23 October 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/10/Ganges_Delta
60) ”Our seas are capturing more carbon than expected,” ESA / Applications / Observing the Earth, 22 September 2020, URL: https://www.esa.int/Applications/Observing_the_Earth/Our_seas_are_capturing_more_carbon_than_expected
61) Andrew J. Watson, Ute Schuster, Jamie D. Shutler, Thomas Holding, Ian G. C. Ashton, Peter Landschützer, David K. Woolf & Lonneke Goddijn-Murphy, ”Revised estimates of ocean-atmosphere CO2 flux are consistent with ocean carbon inventory,” Nature Communications, Volume 11, Article No 4422, Published: 4 September 2020, https://doi.org/10.1038/s41467-020-18203-3
62) ”Medicane Ianos,” ESA Applications, 18 September 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/09/Medicane_Ianos
63) ”West coast wildfires,” ESA Applications, 11 September 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/09/West_coast_wildfires
64) ”Cloud-free Iceland,” ESA Applications, 28 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/Cloud-free_Iceland
65) ”Monitoring the Arctic heatwave,” ESA Applications, 27 August 2020, URL: https://www.esa.int/Applications/Observing_the_Earth/Monitoring_the_Arctic_heatwave
66) ”California on fire,” ESA Applications, 20 August 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/08/California_on_fire
67) ”Safeguarding our oceans,” ESA Applications, 8 June 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/06/Safeguarding_our_oceans
68) ”Northwest Greenland,” ESA Applications, 8 May 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/05/Northwest_Greenland
69) ”Canadian Arctic Archipelago,” ESA Applications, 6 March 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/03/Canadian_Arctic_Archipelago
70) ”Japanese archipelago,” ESA Applications, 17 January 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/01/Japanese_archipelago
71) ”Australia: like a furnace,” ESA / Applications / Observing the Earth / Copernicus, 9 January, 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Copernicus/Australia_like_a_furnace
72) Craig Donlon, Bruno Berruti, Susanne Mecklenburg, Jens Nieke, Helge Rebhan, Ulf Klein, Alessandra Buongiorno, Constantin Mavrocordatos, Johannes Frerick, Bernd Seitz, Phillipe Goryl, Pierre Féménias, Juergen Stroede,Roberto Sciarra, “The Sentinel-3 Mission: Overview and Status,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
73) B. Berruti, J. Frerick, C. Mavrocordatos, J. Nieke, H. Rebhan, J. Stroede, and the S3 Team, “Status of the optical payload and processor development of ESA’s Sentinel 3,” 2nd MERIS/AATSR User Workshop, September 22-26, 2008, ESA/ESRIN Frascati, Italy, URL: http://earth.esa.int/workshops/meris_aatsr2008/participants/803/pres_803_Rebhan-Nieke.pdf
74) Craig Donlon, B. Berruti, J. Frerick, C. Mavrocordatos, J. Nieke, H. Rebhan, J. Stroede, and the S3 Team, “Sentinel-3 OLCI and SLSTR,” Medspiration/GlobColour symposium, Frascati, Italy, Nov. 20, 2008, URL: http://www.globcolour.info/workshop_200811_presentations/3_Future/Donlon-Sentinel-3%20OLCI%20and%20SLSTR-v1.0.pdf
75) Henri Laur, “From MERIS to OLCI Ocean color at ESA,” International Ocean Color Science (IOCS) Meeting, Darmstadt, Germany, May 6-8, 2013, URL: http://iocs.ioccg.org/wp-content/uploads/1020-henri-laur-esa-from-meris-to-olci.pdf
76) ”Sentinel-3 OLCI instrument User Guide,” ESA, URL: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-3-olci/overview/heritage
77) Henri Laur, “Sentinel-3 Operational Oceanography & Global Land Application,” MERIS US Workshop, Silver Spring, MD, USA, July 14, 2008, URL: http://earth.esa.int/workshops/esameris08/presentations/Sentinel_3_OLCI.ppt
78) L. Bourg, L. Blanot, N. Lamquin, V. Bruniquel, N. Meskini, J. Nieke, M. Bouvet, B.Fougnie, ”Sentinel-3 OLCIRadiometric and Spectral Performances Activities,” Proceedings of the Sentinel-3 for Science Workshop, Venice, Italy, June 2-5,2015, ESA SP-734, Dec. 2015
79) Peter Cappo, Moreno Stagi, Thomas Hennig, John Delderfield, “The Sea & Land Surface Temperature Radiometer (SLSTR) technologies,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.3.4
80) P. Coppo; B. Ricciarelli; F. Brandani; J. Delderfield; M. Ferlet; C. Mutlow; G. Munro; T. Nightingale; D. Smith; S. Bianchi; P. Nicol; S. Kirschstein; T. Hennig; W. Engel; J. Frerick; J. Nieke, “SLSTR: a high accuracy dual scan temperature radiometer for sea and land surface monitoring from space,” Journal of Modern Optics, 1362-3044, August 12, 2010,
81) Peter Coppo, Massimo Cosi, Wolfang Engel, Jens Nieke, Dave Smith, Stephane Bianchi, “Status of the Sea & Land Surface Temperature Radiometer (SLSTR) for the Sentinel 3 GMES Mission,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7826-19, 'Sensors, Systems, and Next-Generation Satellites XIV, edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, doi: 10.1117/12.868451
82) Yves Le Roy, Marc Deschaux-Beaume, Constantin Mavrocordatos, Franck Borde, “SRAL, a Radar Altimeter Designed to Measure several Surface Types,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7825-7, 'Remote Sensing of the Ocean, Sea Ice, and Large Water Regions 2010,' edited by Charles R. Bostater Jr., Stelios P. Mertikas, Xavier Neyt, Miguel Velez-Reyes, doi: 10.1117/12.865060
83) S. Varchetta, M. L'Abbate, M. Mappini, C. Svara, “From ERS to Sentinel 3 Altimetry Radiometers,” Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.3.05
84) Y. Le Roy, M. Deschaux-Beaume, C. Mavrocordatos, M. Aguirre, F. Hélière, “SRAL SAR Radar Altimeter for Sentinel-3 mission,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
85) C. Mavrocordatos, B. Berruti, M. Aguirre, M. Drinkwater, “The Sentinel-3 mission and its Topography element,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
86) U. Klein, B. Berruti, F. Borde, C. Mavrocordatos, and the Sentinel-3 team, “The Sentinel-3 Topography Payload,” Proceedings of the 2nd Workshop on Advanced RF Sensors and Remote Sensing Instruments 2009, Noordwijk, The Netherlands, Nov. 17-18, 2009
87) https://sentinel.esa.int/web/sentinel/missions/sentinel-3/instrument-payload/altimetry
88) R. K. Raney, “CryoSat Data as Delay-Doppler Proof of Concept,” CryoSat 2005 Workshop, Frascati, Italy, March 1, 2005, URL: http://earth.esa.int/workshops/cryosat2005/participants/68/pres_raney.pdf
89) Éric Choinière, Jaroslaw Uher, Nycolas Michel, “Design of a 1.2 m dual-band C/Ku center-fed antenna for advanced radar altimetry,” Proceedings of the 32nd ESA Antenna Workshop on Antennas for Space Applications, Noordwijk, The Netherlands, Oct. 5-8, 2010, URL: https://web.archive.org/web/20140908140629/http://utopia.duth.gr/~iaitidis/ESA%20conference%202010/Papers/session%202/FCXNL-10C09-2020242-1-2020242choiniere.pdf
90) Marc Bergadà; Patricia Brotons; Yolanda Camacho; Leila Díez; Ataúlfo Gamonal; J. Luis García; Raquel González; Alberto Pacheco; M. Ángel Palacios; Ulf Klein, “Design and Development of the Sentinel-3 Microwave Radiometer,” Proceedings of the SPIE Remote Sensing Conference, Toulouse, France, Vol. 7826, Sept. 20-23, 2010, paper: 7826-20, 'Sensors, Systems, and Next-Generation Satellites XIV,' edited by Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, doi: 10.1117/12.864575
91) F. Barletta, M. Imparato, L. Battaglia, P. V. Giove, P. Colucci, A. Massari, A. Suriani, “Sentinel-3, NIR Radiometer K/Ka-band Radio Frequency Front End,” Proceedings of the 2nd Workshop on Advanced RF Sensors and Remote Sensing Instruments 2009, Noordwijk, The Netherlands, Nov. 17-18, 2009
92) U. Klein, B. Berruti, C. Mavrocordatos, Marc Bergada, and the S3 team, “Design and development status of the Sentinel-3 Microwave Radiometer,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012
93) Miguel Ángel Palacios, Marc Bergadà, Raquel González, Ataúlfo Gamonal, José Luis García, Laura París Bernabé, Leila Díez, Noelia Alcaraz, Ignacio Melendo, Raúl Herrero, “The Sentinel-3 MWR: On-Ground Calibration and Characterization of a Noise Injection Radiometer,” Proceedings of the Advanced RF Sensors and Remote Sensing Instruments &Ka-band Earth Observation Radar Missions, (ARSI'14 & KEO'14), ESA/ESTEC, Noordwijk, The Netherlands, Nov. 4-7, 2014
94) P. Bargellini, P. P. Emanuelli, D. Provost, R. Cunningham, H. L. Moeller, “Sentinel-3 Ground Segment: Innovative Approach for future ESA-EUMETSAT Flight Operations cooperation,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2193
95) Marc Niézette, “Sentinel-3 Payload Data Ground Segment,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B1.4.4
96) “ESA campaign reveals glimpse of future Sentinel-3 imagery,” Sept. 9, 2009, URL: http://www.esa.int/esaLP/SEMOW432BZF_LPcampaigns_0.html
97) Stelios Mertikas, Achilles Tripolitsiotis, Constantin Mavrocordatos, Nicolas Picot, Pierre Féménias, Antonios Daskalakis, François Boy, “A Permanent Infrastructure in Crete for the Calibration of Sentinel-3, CryoSat-2 and Jason Missions with a Transponder,” Proceedings of the ESA Living Planet Symposium, Edinburgh, UK, Sept. 9-13, 2013, SP-722, Dec. 2013
98) A.R. Birks, “Radar Altimeter Calibration Using Ground Based Transponders,” Proceedings of the Envisat Symposium, Montreux, Switzerland, April 23-27, 2000, ESA SP-636, URL: http://earth.esa.int/pub/ESA_DOC/gothenburg/171birks.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top