CHEOPS (CHaracterizing ExOPlanets Satellite)
Non-EO
Quick facts
Overview
| Mission type | Non-EO |
| Launch date | 18 Dec 2019 |
CHEOPS (CHaracterizing ExOPlanets Satellite)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
CHEOPS is a minisatellite, the first mission in ESA's small Science Program, selected in October 2012; the project was adopted for implementation in February 2014. The SPC (Science Program Committee) of ESA decides on the program content, which is structured along the Cosmic Vision Plan since 2007.
The objective is to target nearby, bright stars already known to have planets orbiting around them. Through high-precision monitoring of the star’s brightness, scientists will search for the telltale signs of a ‘transit’ as a planet passes briefly across its face. This will allow an accurate measurement of the radius of the planet. For those planets with a known mass, the density will be revealed, providing an indication of the internal structure. 1)
The CHEOPS mission is devoted to the fine characterization of exoplanets orbiting around bright stars by using transit photometric measurements. The mission is envisaged as a partnership between the ESA Science Program and Switzerland, through the Swiss Space Office (SSO). The University of Bern leads a consortium of 11 ESA Member States contributing to the mission and represented in the CHEOPS Science Team. ESA is the mission architect responsible for overall mission definition and procurement of the spacecraft and launch. ESA is also responsible for the early operations phase that will be executed by the spacecraft contractor, Airbus Defence and Space – Spain. The science instrument is led by the University of Bern, with important contributions from Austria, Belgium, Germany and Italy. 2) 3) 4) 5) 6)
CHEOPS is considered as a test case for implementing a S-Mission (Small Mission) in the ESA Science Program, and it’s being implemented according to the following requirements:
- S-class missions must be science-driven and selected through an open call for missions (bottom-up process)
- The mission implementation cycle, from the call for proposals to launch, must be drastically shorter than for medium (M) and large (L) class missions
- Missions must be cost-capped, possibly with a proportionally larger Member States involvement than for M or L missions.
Science measurements | Observations of planetary transits for known exoplanet host stars brighter than the 12th magnitude in the V band. Photometric measurement accuracy < 20 ppm for stars with V < 9 (goal < 10 ppm) in 6 hours of integration time. |
Mission profile | -Nominal orbit: sun-synchronous, 800 km, LTAN 6:00 hrs. Spacecraft compatible with several launchers as passenger (e.g. Soyuz under ASAP-S, VEGA using VESPA adapter, PSLV, etc.). |
Instrument | - On-axis Ritchey-Chrétien telescope of 33 cm diameter, FOV 19 arcmin x 19 arcmin, back-illuminated frame transfer CCD detector. |
Spacecraft | - 3-axis stabilized platform, with pointing accuracy better than 8 arcsec rms over a 48 hour observation. Use of the star centroid from the science instrument for removing low frequency pointing errors. |
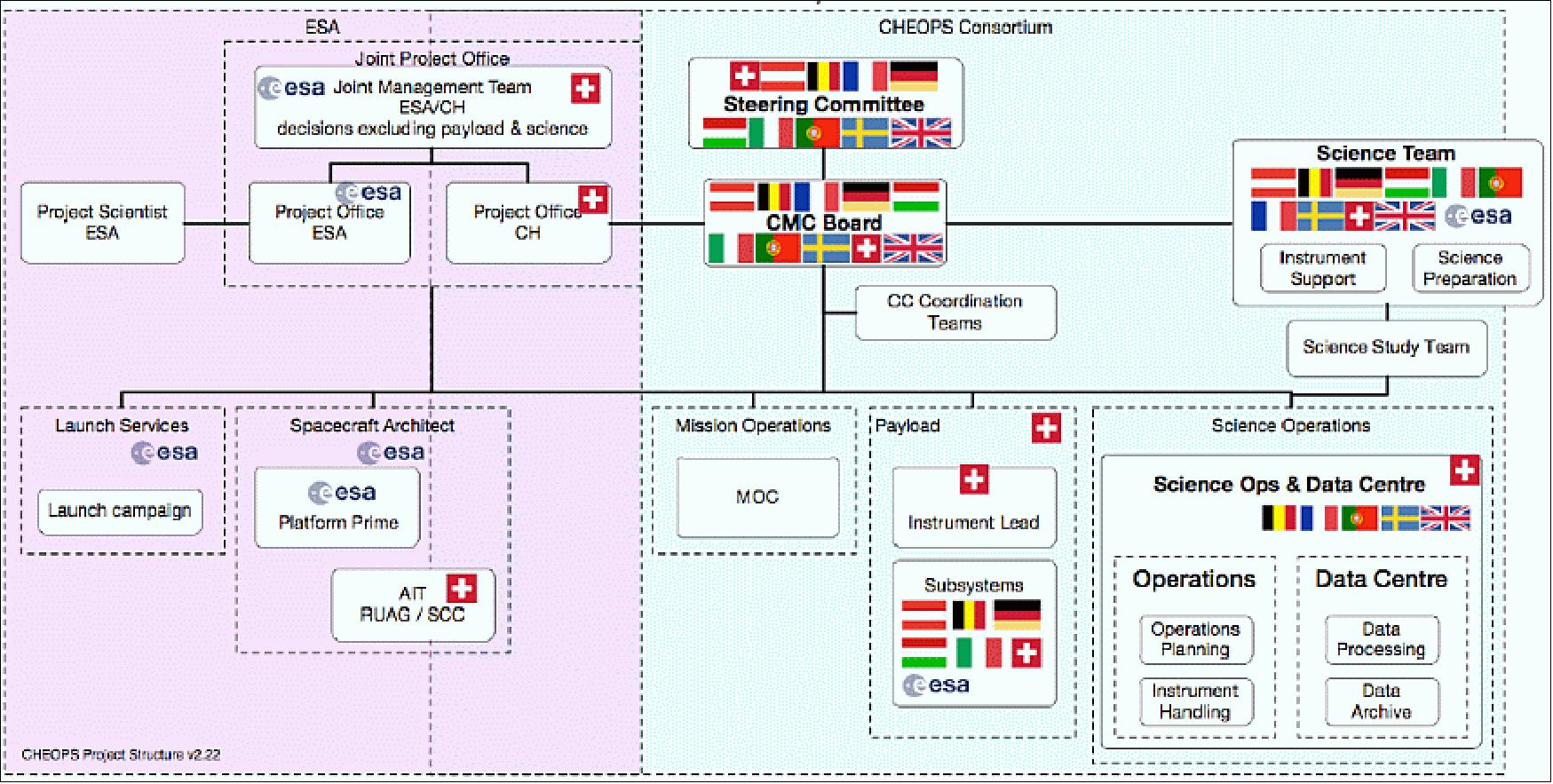
Project Organisation & Responsibilities
The CHEOPS Mission Consortium (CMC), led by the University of Bern (CH), is responsible for the following mission elements: 7)
• Development, procurement, qualification and calibration of the instrument
• Provision of AIT services in support to the satellite activities
• In-orbit monitoring, calibration and evaluation of the instrument performance
• Provision of the CHEOPS ground segment, including:
- The Ground station(s)
- The MOC (Mission Operations Center)
- The SOC (Science Operations Center)
ESA will be in charge of the overall mission architecture and is responsible for the following activities:
• Procurement of the CHEOPS platform accommodating the instrument assembly
• Procurement of the instrument detector CCD
• Integration, test and qualification of the complete satellite
• Procurement of the mission control system, satellite and instrument simulator and any required flight dynamics system
• Procurement of the launch opportunity and launch operations
• LEOP and in-orbit commissioning.
Mission architect, platform development | ESA |
Instrument | Member States (Consortium led by Switzerland with W. Benz as PI at the University of Bern) |
Launch | ESA |
Spacecraft operations | Member States (Operations will be implemented by Spain, as part of the Swiss-led Consortium) |
Science operations | Member States (Operations will be implemented by the University of Geneva, as part of the Swiss-led Consortium) |
Technology Readiness Requirements
The Call for S1 mission requested the mission concept to be compatible with existing platforms, with minimum modification. All platform equipment must be off-the-shelf, flight qualified (TRL ≥ in ISO scale), and preferably flight proven (TRL ≥ 9). Modifications to existing products must be compatible with the development schedule (less than ~ 3 years for the platform) with satisfactory margins. Limited adaptation of the platform mechanical design and accommodation is an illustrative example of allowable modifications: although such modification may require the requalification of the platform structure, it can be achieved in less than 2 years with low schedule risks, and is therefore acceptable.
The science payload was requested to rely on available technologies (TRL > 5-6 in ISO scale), without ruling out new instrument developments, provided they can be safely achieved in less than three years (e.g. using some heritage or building on previous developments).
With the above approach, the major development risks are on the payload side. One could have equally requested a high TRL for the science instrument, as for the platform equipment. Such an approach was deliberately not followed for maximizing the “science accessibility” of the Call and the competition at mission level. Indeed, a higher payload TRL (TRL ≥ 7) would imply designing the mission around an existing instrument that would have been recently developed for a previous mission. As a matter of fact, most of the shortlisted missions, including CHEOPS, could not have been proposed under such condition.
Industrial Implementation through ESA
The approach retained for the industrial development of S-missions differs substantially from that for L and M missions, while obeying all the Agency rules. L or M missions are defined and implemented in three major phases:
1) The preparation phase: This phase starts by a Phase 0 performed by ESA, then includes a detailed study phase (Phases A and B1) where the mission definition and requirements are progressively matured and finally frozen, and where the mission critical technologies are developed in parallel aiming at TRL ≥ 6 (ISO scale) prior to starting the spacecraft development. The study phase is achieved with parallel industrial contracts, awarded in competition in two steps, for preserving the industrial competition for the spacecraft development. At the end of the preparation phase, the SPC in principle has available all critical elements for adopting the mission (i.e. deciding
on its implementation) in particular: the actual science that can be achieved, the development schedule, the development risks for all the space segment elements including the science payload, and the mission cost to ESA.
2) The implementation phase: Following the mission adoption by the SPC, the Agency initiates the implementation phase by first selecting the Prime contractor for the space segment development, and then the subsystem contractors and the equipment suppliers. Most of the industrial contractors are known at the end of phase B2, which is closed by the system PDR (Preliminary Design Review). The selection of all industrial contractors is made through ESA “procurement best practices”, i.e. in open competition with due consideration to specific procurement constraints, such as the geographical distribution of contracts. Following successful development and verification, the space segment is launched and the implementation phase ends with in-orbit commissioning.
3) The operational phase: The operational phase covers the nominal lifetime in-orbit plus possible extended time. The operations include: the control of the spacecraft, including communications; the execution of the required science observations (science operations); the data processing prior to delivery to the science community; and the data archiving.
For CHEOPS, the ESA Industrial Policy Committee approved the following approach, which is being implemented:
• A single Invitation to Tender was issued, covering both the study phase and the implementation phase for the platform. Obviously, this is possible only if 1) no technology developments are required and 2) the space segment requirements are mature enough at the end of Phase 0. Both conditions should be met by S-missions for enabling a fast implementation, and both were actually met by CHEOPS. A ceiling price was required from the bidders for the implementation phase.
• Parallel contracts were awarded for a “study and final contractor selection phase” limited to ~8 months, which was used for maturing the instrument definition and interfaces, and clearing critical contractual aspects. The parallel contracts were awarded to EADS CASA ESPACIO (ECE, Spain) and SSTL (UK). At the end of the study phase, the System Requirement Review was held with both competing contractors. The two shortlisted contractors were also required to convert their initial proposal to a firm fixed price proposal covering any requirement update resulting from the study phase, and providing their “best and final offer” prior to selection. ECE was finally selected by ESA for the platform development.
• While the platform contractor selection was made following ESA standard best practices, the platform equipment level was not subject to the same selection process. Indeed, since the concept is asking a fast development schedule and is therefore based on re-using existing “off-the-shelf” platforms with minimum modifications, it makes little sense to re-open the platform equipment selection through extensive ESA procurement best practices. The two competing platform contractors were requested to make best use of their respective heritage for meeting the high level requirements of S-missions, namely: a fast development schedule; mastered development risks; and cost ceiling. The faster selection of equipment suppliers, mostly through direct negotiations, also enabled to lower ESA internal costs.
The Science Program requirements regarding geographical return balance were taken into account by strongly constraining the over-returned countries (France and Germany in this case) in the platform Invitation to Tenders de facto excluding them from the platform competition. Therefore, any platform implemented under these conditions would contribute to the geographical return re-balance of the program – although modestly, since the CHEOPS contract value is only 6-7% of a typical Prime industrial contract for a M-class mission. In a way, the full CHEOPS contract is comparable in value to a subsystem of an M-mission spacecraft, and it is not excluded by ESA rules to make use of a simplified procurement scheme if, for some reason, the subsystem is required to be recurring from a previous mission.
Science Objectives
The discovery of planets around other stars (exoplanets) has opened one of the most interesting and exciting field in modern astronomy. After nearly two decades mainly dedicated to a census of exoplanets, emphasis is now shifting on the physical and chemical characterization of exoplanets and their systems. CHEOPS will be the first mission dedicated to search for transits of exoplanets by means of ultrahigh precision photometry on bright stars already known to host planets. The main science objective of the CHEOPS mission will be to study the structure of exoplanets smaller than Saturn orbiting bright stars and to measure the bulk density of super-Earths and Neptunes orbiting bright stars (Ref. 4).
CHEOPS will provide the unique capability of determining accurate radii for a subset of those planets for which the mass has already been estimated from ground-based spectroscopic surveys, providing on-the-fly characterization for exoplanets located almost everywhere in the sky. It will also provide accurate radii for new planets discovered by the next generation of ground-based transits surveys (Neptune-size and smaller). By unveiling transiting exoplanets with high potential for in-depth characterization, CHEOPS will provide “golden targets” for future missions, such as the recently selected M3-Plato mission, and for future instruments suited to the spectroscopic characterization of exo-planetary atmospheres.
CHEOPS is built to achieve a photometric precision similar to the Kepler mission of NASA while observing much brighter stars located almost anywhere on the sky. The CHEOPS target list will mainly consist of stars with small exoplanets previously detected by accurate Doppler surveys and known transiting Neptune-size planets detected by ground-based photometric surveys. CHEOPS is also currently envisioned following-up a significant number of targets from the planned TESS (Transiting Exoplanet Survey Satellite) mission of NASA.
In comparison with random searches such as those carried out by CoRoT and Kepler, CHEOPS will be incredibly more efficient. Knowing where to look and at what time to observe is priceless information particularly to detect (and characterize) long-period transiting systems (up to 50 days of revolution period).
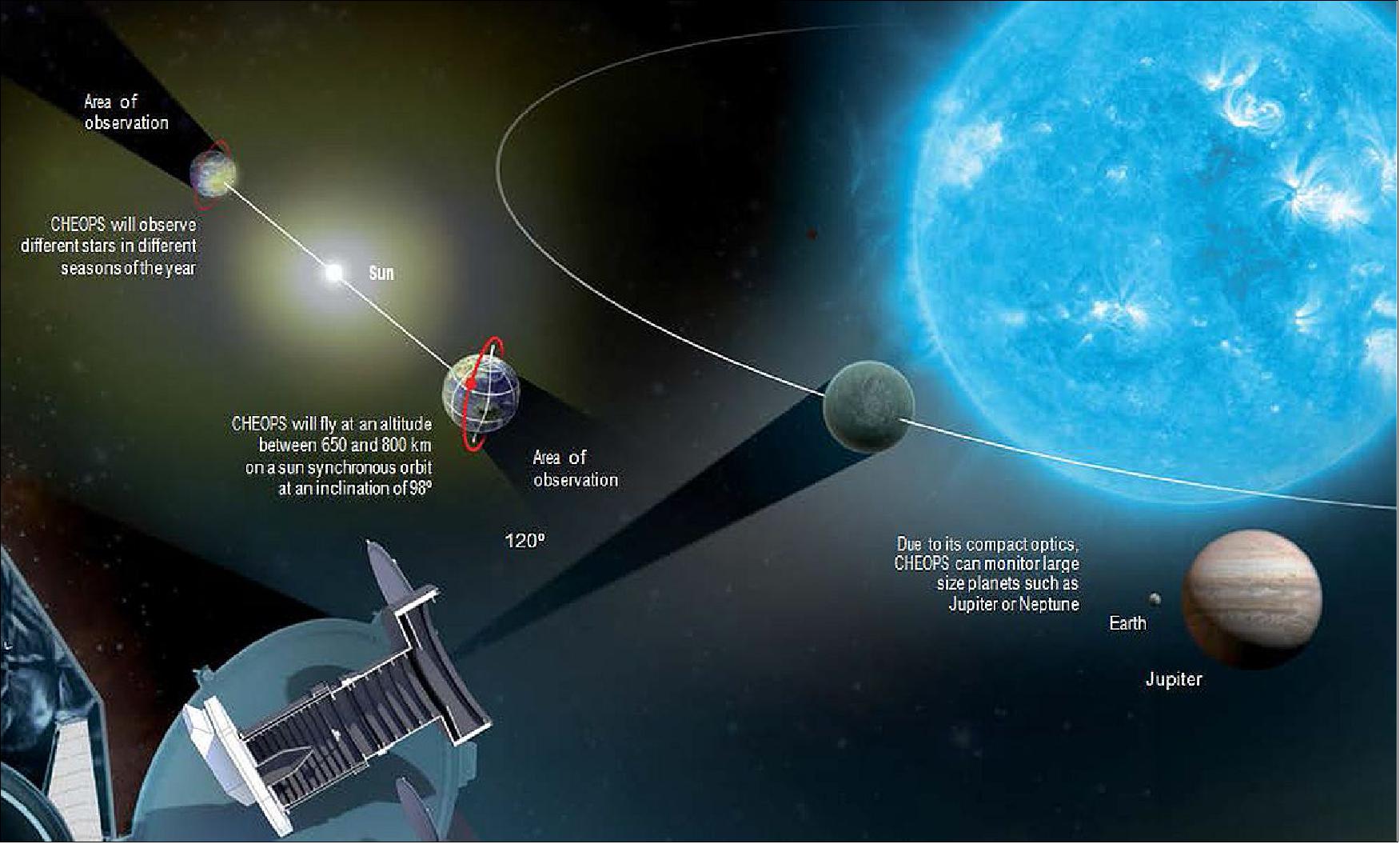
Target observability and sky coverage: The key to precise photometric transit measurements is to keep the noise in the measurements to an absolute minimum. Besides the noise associated with the detector itself, stray light is the main source of noise. This stray light is minimized through the design of the telescope itself, the orbit chosen, and by limiting the directions in which the telescope points in order to avoid solar light reflected by the Earth and/or the Moon reaching the detector. With the current design of the CHEOPS telescope, in order to meet the photometric requirements mentioned above, the following conditions have to be met:
- the angle between the line-of-sight and the sun must be larger than 120º
- the angle between the line-of-sight and any illuminated part of the Earth must be larger than 35º. In addition, the target must have a projected altitude from the surface of the Earth equal or higher than 100 km
- the angle between the line-of-sight and the Moon must be larger than 5º.
The prime mission goals of CHEOPS are:
1) Performing first-step characterizations of super-Earths: Measuring the radius, density, and inferring the presence or absence of a significant atmospheric envelope for super-Earths in a wide range of environmental conditions. This will be achieved by searching for shallow transits on bright stars (6 < V < 9 mag) already known to host planets in this mass range with revolution periods up to 50 days.
2) Obtaining new insights into the physics and formation processes of Neptunes: Measuring accurate radii for Neptunes, determining precise densities, deriving minimum values of their gas mass fractions, and inferring possible evolution paths. This will be achieved by characterizing the transit light curves of tens of Neptunes with revolution periods up to 13 days, previously detected in transit across stars brighter than the 12th magnitude in the V band.
3) Building a collection of “golden targets” for exo-planetology: The small mass exoplanets transiting bright stars observed by CHEOPS will be the best suited targets for in-depth atmospheric characterization by spectroscopic facilities contemporaneous or subsequent to the mission (e.g., the James Webb Space Telescope).
Background on Exoplanet Missions
The first discoveries of exoplanets in the 1990s, by ground-based observatories, completely changed our perspective of the Solar System and opened up new areas of research that continues today. This infographic highlights the main space-based contributors to the field, including not only exoplanet-dedicated missions, but also exoplanet-sensitive missions, past, present and future. 8)
One of the first exoplanet-sensitive space telescopes was the CNES-led CoRoT (Convection, Rotation and planetary Transits) mission, which launched in 2006. While focused on studies of stars, it uncovered exoplanets using the transit method.
NASA’s 2009 Kepler mission is an exoplanet discovery machine, accounting for around three-quarters of all exoplanet discoveries so far. It looks at a specific patch of sky for a lengthy period of time, so is sensitive to a great number of faint stars.
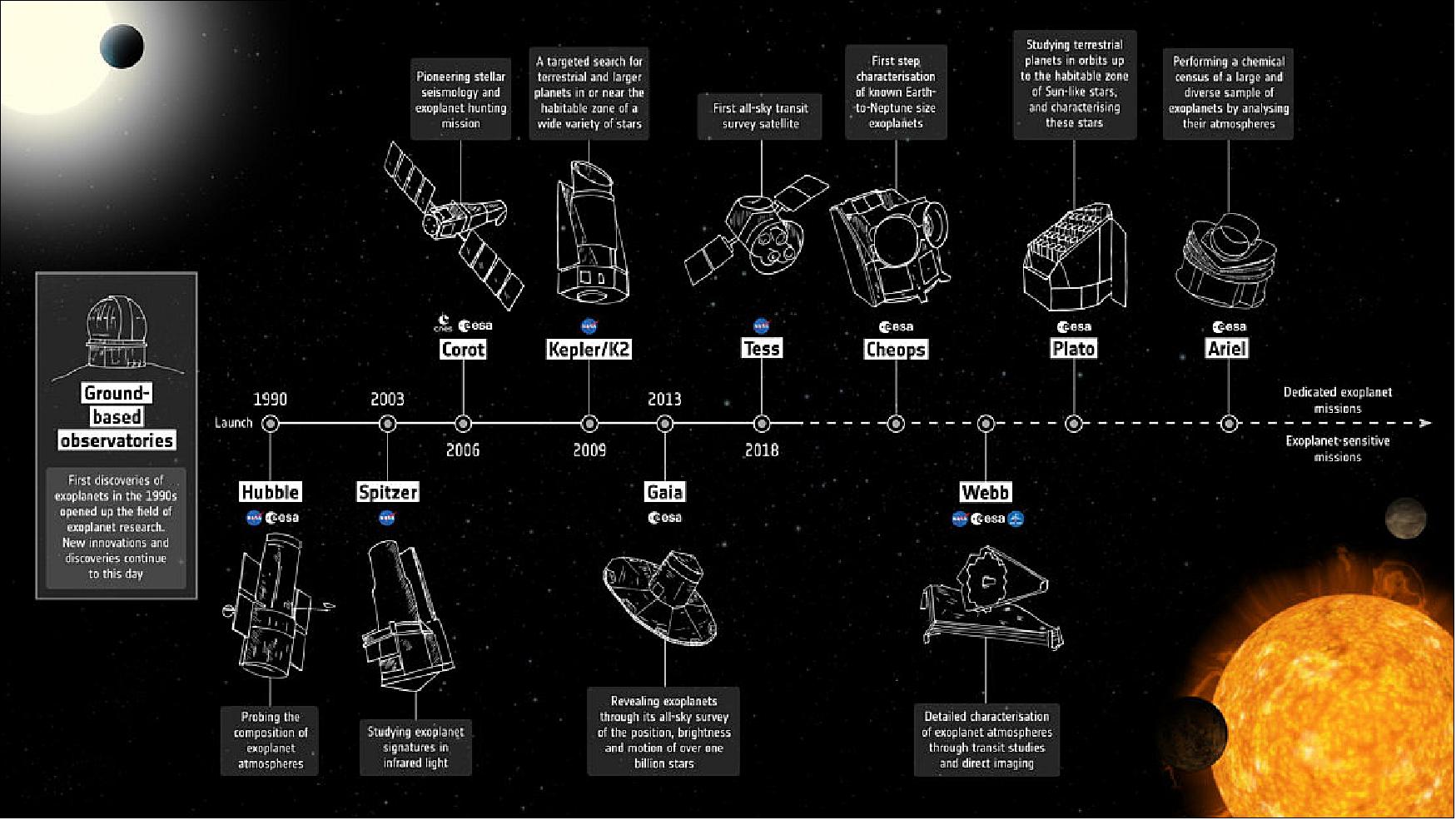
Meanwhile, telescopes that were launched even before the first discoveries were confirmed, such as the NASA/ESA Hubble Space Telescope, have been contributing to the evolving field.
ESA’s Gaia mission, through its unprecedented all-sky survey of the position, brightness and motion of over one billion stars, is providing a large database to search for exoplanets. These will be uncovered through the changes in the star’s motion as the planet or planets orbit around it, or by the dip in the star’s brightness as the planet transits across its face.
The most recent addition to the exoplanet-hunting fleet is NASA’s TESS (Transiting Exoplanet Survey Satellite), launched in April 2018. It is the first all-sky transit survey satellite.
But discovering an exoplanet is just the beginning: dedicated telescopes are needed to follow up on this ever-growing catalog to understand their properties, to get closer to knowing if another Earth-like planet exists, and better understanding what conditions are needed for planet formation and the emergence of life.
ESA is launching three dedicated exoplanet satellites in the next decade, each tackling a unique topic.
1) CHEOPS (Characterizing Exoplanet Satellite) will observe bright stars known to host exoplanets, in particular Earth-to-Neptune-sized planets, anywhere in the sky. By knowing exactly where and when to look for transits, and being able to return to repeatedly observe the same targets, Cheops will become the most efficient instrument to study individual exoplanets. It will record the precise sizes of these relatively small planets and combined with mass measurements already calculated from other observatories, will enable the planet’s density to be determined, and thus make a first-step characterization of the nature of these worlds. — Cheops will also identify candidates for additional study by future missions. For example, it will provide well-characterized targets for the international James Webb Space Telescope, which will perform further detailed studies of their atmospheres.
2) Plato (PLAnetary Transits and Oscillations of stars) mission, is a next-generation planet hunter with an emphasis on the properties of rocky planets up to the habitable zone around Sun-like stars – the location from a star where liquid water can exist on the planet’s surface. Importantly, it will also analyze the planet’s host star, including its age, and thus give insight into the evolutionary state of the entire extrasolar system.
3) Ariel (Atmospheric Remote-Sensing Infrared Exoplanet Large-survey) mission, will perform a chemical census of a large and diverse sample of exoplanets by analyzing their atmospheres in a great amount of detail.
With the complementary work of both ground- and space-based observatories, we will get closer to understanding one of humanity’s biggest questions: are we alone in the Universe?
Spacecraft
The Spacecraft platform has undergone a successful SRR (System Requirements Review) in March 2014 leading to the selection of the platform contractor by end of April 2014, with a scheduled PDR (Preliminary Design Review) for September 2014, and a fast implementation phase with a readiness for launch in 2018. 10)
The short platform development schedule (~2.5 years) precludes any new technology development, requiring preferably TRL 6 (qualified items) for all elements of the platform. Therefore, as specified in the ITT (Invitation To Tender), the proposed CHEOPS platform had to be an adaptation of an existing product, flight qualified and with heritage for all aspects including equipment qualification, design, development and verification approach (Ref. 4).
From the mission analysis and to satisfy the science requirements, the driving design requirements for the platform design are:
• Sun-synchronous orbit with a local time in the ascending mode (LTAN) to be at 6:00 or at 18:00 hours (decision open in order to increase possibility to find a co-passenger for launch) with an altitude in the range between 650 and 800 km, enabling to have the sun permanently on the backside of the spacecraft and minimizing Earth stray-light.
• A 3-axis stabilized spacecraft, keeping the telescope line of sight fixed in inertial reference frame with an APE (Absolute Performance Error) better than 8 arcsec for pointing accuracy (for 68% of the observation time), slowly rotating around the telescope line of sight for maintaining the focal plane radiator oriented towards cold space (i.e., at zenith of the subsatellite point), enabling a passive cooling of the CIS (Contact Image Sensor) detector to 233 K.
• Instrument to avoid pointing at the sun once cover is opened and provision of a fixed sunshield to protect the instrument radiators from sun illumination and providing it with a stable thermal environment.
• Required compatibility with a variety of different launcher vehicles and thus an envelope launch environment requirements have been defined, presently covering baseline launchers: VEGA and Soyuz, and optional launchers: Rockot, PSLV, Dnepr and Falcon-9. (It is planned to select the Launcher Vehicle at the latest for the mission level Critical Design Review).
• Mass of the spacecraft is approximately 290 kg to be compatible with a shared launch as co-passenger.
• Compatibility with several Ground Station coverage scenarios, e.g. using Redu, Harwell, Malindi and/or Kiruna, and allowing for 1.2 Gbit/day downlink in S-band.
• Deorbiting of the spacecraft within 25 years at the end of the mission, sized for a worst case 800 km orbit, to comply with ESA orbit debris mitigation requirements.
The project development is organized on two main phases:
• Phase 1 (A/B1) – Competitive definition phase to consolidate all CHEOPS mission requirements, provide evidence that the proposed spacecraft design meets those technical, quality and programmatic requirements and the budget constraints. This phase is ending with the SRR.
• Phase 2 (B2/C/D/E1) – Implementation phase encompassing activities to freeze the spacecraft design until Launch, LEOP and In-Orbit Commissioning.
And, as a key element in the CHEOPS implementation approach, ESA released a single ITT (Invitation To Tender) for the satellite procurement covering both phases calling for a full implementation proposal, with a corresponding ceiling price, to be converted in a firm-fixed price at the end of Phase 1.
• In July 2014, ESA announced that the CHEOPS project had entered the implementation phase (meaning that the spacecraft has gone from selection to implementation in less than 18 months). Capped to an ESA cost of €50 million, CHEOPS is being developed in collaboration with the Swiss Space Office (SSO), a division of the Swiss State Secretariat for Education, Research and Innovation (SERI), and the University of Bern, Switzerland. The Swiss organizations lead the consortium of 11 ESA Member States contributing to the mission and represented in the CHEOPS Science Team. The spacecraft will be built by Airbus Defence and Space, Spain. 11)
- The science instrument is led by the University of Bern, with important contributions from Italy, Germany, Austria, and Belgium. Other contributions to the science instrument in the form of hardware, or in the science operations and exploitation, are provided by the United Kingdom, France, Hungary, Portugal and Sweden. The MOC (Mission Operations Center) is under the responsibility of Spain, while the SOC (Science Operations Center) is located at the University of Geneva, Switzerland.
- The Prime contractor for CHEOPS is Airbus Defence and Space, Spain (note: former EADS CASA Espacio S.L. Is now part of Airbus Defence and Space).
CHEOPS Platform 12)
The CHEOPS spacecraft is based on the Airbus Defence and Space AstroBus family of low cost satellite platforms (following on from e.g. Spot- 6 & -7, KazEOSat-1), and the ninth for an ESA program following on from Sentinel-5 Precursor and the MetOp Second Generation satellites.
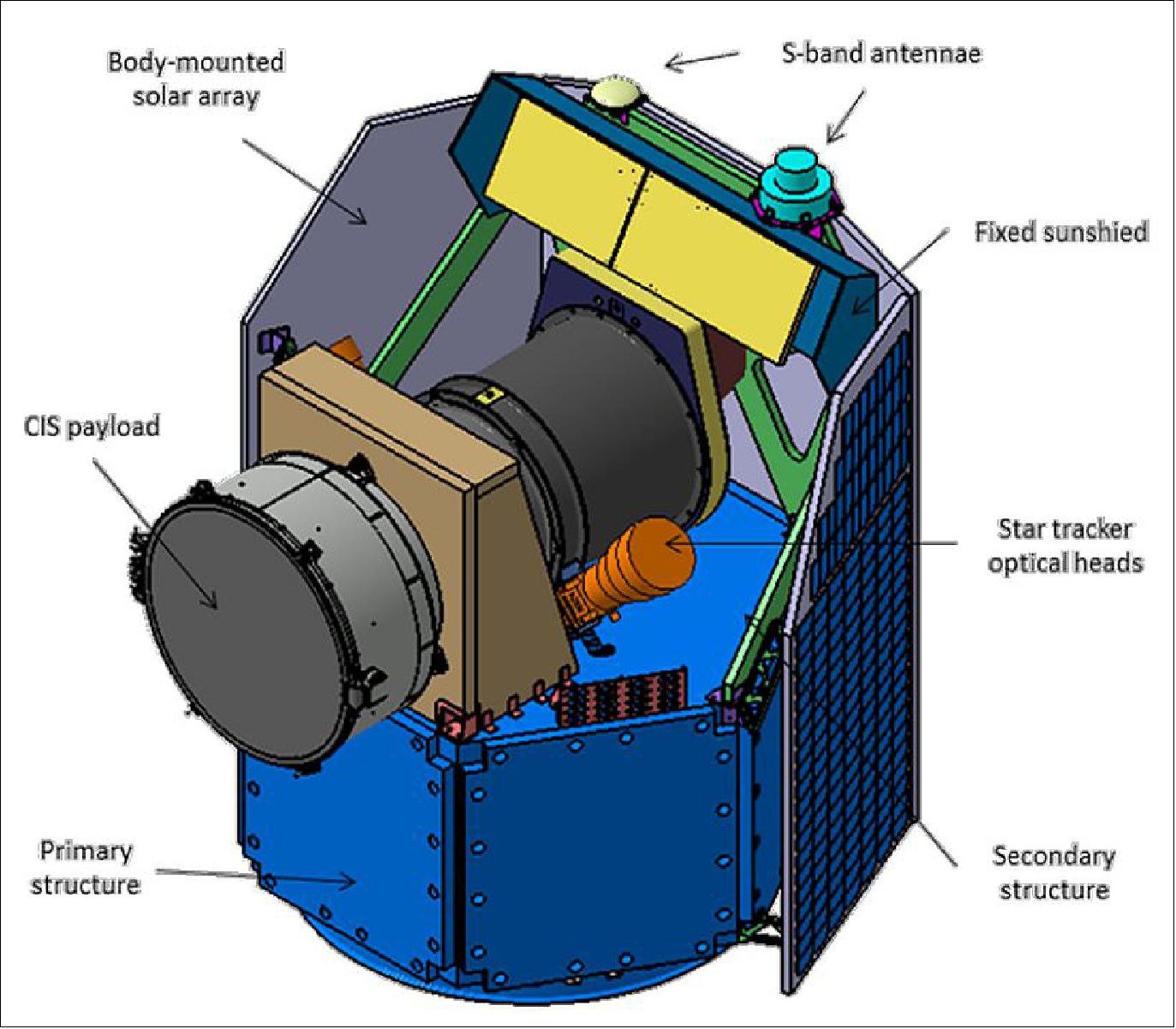
The satellite is composed by a prismatic body platform, where the Optical Instrument is mounted on its top surface, plus three body-mounted solar array panels (Figure 6). There is a fixed sunshield in the central solar panel, to provide the required shadow to Instrument radiators.
The three body-mounted solar array panels have at 67 degree deviation between them, in order to have best illumination in any mission attitude. The bottom surface is dedicated to the launcher interface, for which a 937 standard clamp-band system is proposed. The propulsion module thrusters and S-band –Z antenna are in bottom panel with the minimum protrusion downwards from separation plane. The top surface of the platform prismatic structure is dedicated to the accommodation of the Instrument elements, the Optical Telescope Assembly and Baffle and Cover Assembly.
Two Instrument electronic units are accommodated inside the satellite platform, Sensor Electronics Module and the Back-End Electronics.
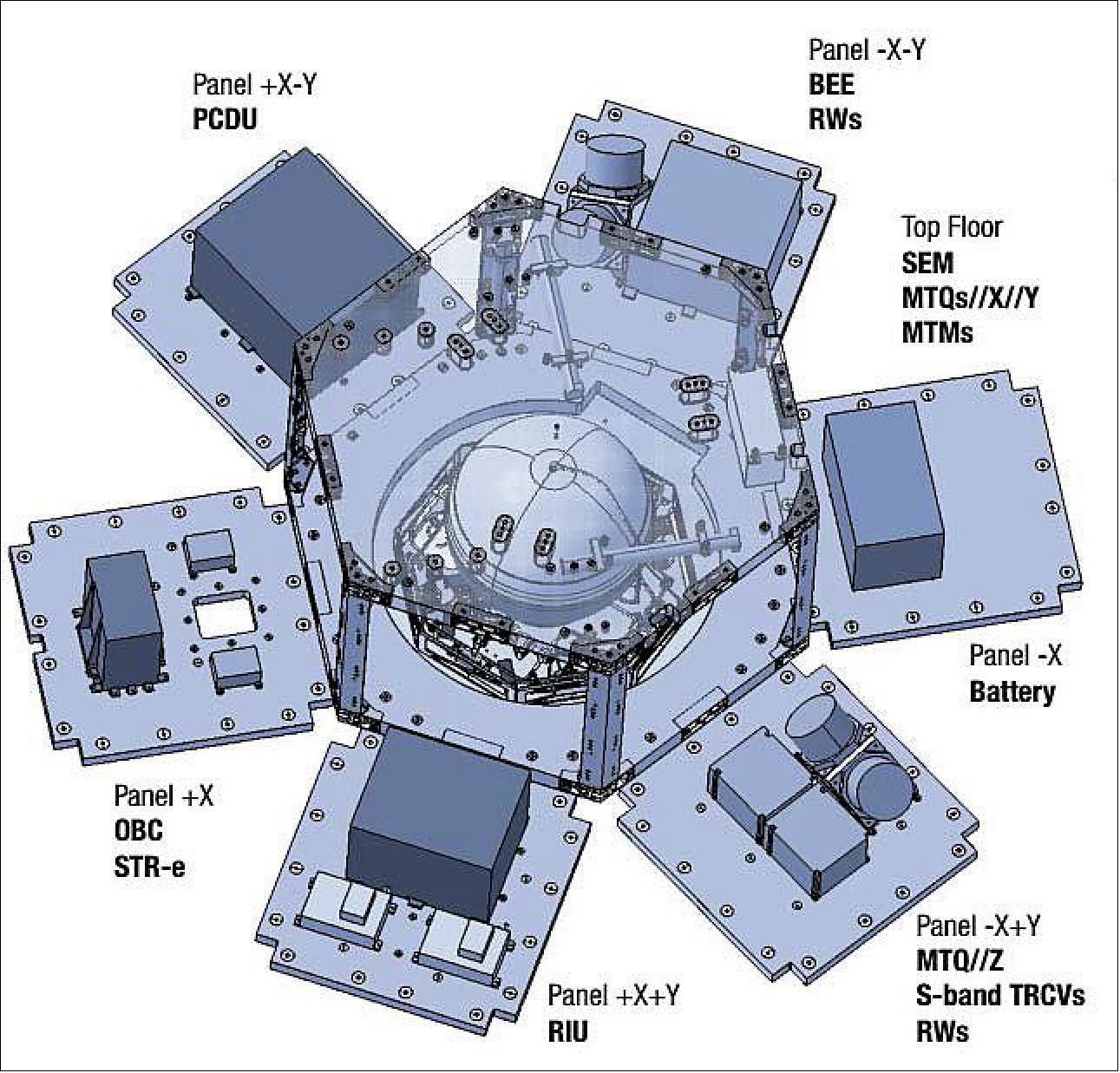
The structure design is made of sandwiches with metallic skins for top-bottom-side panels to benefit of the strong SEOSAT/Ingenio heritage. The panels accommodate the platform and instrument equipment. The prismatic hexagonal body allows the side panels to be deployed using special removable hinges for units’ assembly and electrical and functional integration campaigns.
The thermal control design driver is to achieve a stable payload thermal environment in orbit while minimizing the perturbations on instrument radiator. For such purpose, a sunshield prevents the sun to illuminate instruments radiator under any observation condition. Besides, passive thermal control means are MLI (Multi-Layered Insulation) to insulate from cold space and external fluxes, use of massive parts to improve thermal stability in time, high conductance link between the sensitive parts and their dedicated radiator, radiative surfaces to reject heat and cool down the sensitive parts and conductive thermal insulation. Additionally, heating lines are controlled by the instrument electronics in operating mode, while the survival mode heating lines are operated by the platform. 13)
The platform thermal architecture is based on the AS250 avionics architecture adapted to the CHEOPS mission specific needs and observation constraints, whose main constituents are:
- MLIs to provide insulation from the external environment
- Radiator foils to allow rejection of the heat dissipated by electronic units
- Black coatings to increase the radiative coupling inside the platform
- Interface fillers to increase the thermal contact with the mounting panel
- Thermal washers to conductively decouple from the mounting panel
- Active thermal control (foil heaters and temperature sensors) to maintain all the equipment above their minimum design temperature during cold phases.
The electrical architecture for CHEOPS (Figure 7) is fully recurrent of the AS250 electrical architecture with the corresponding tuning for adaptation to CHEOPS needs, namely:
- A compact S-band communication transceiver (TRCV)
- New models of AOCS sensors and actuators sized to CHEOPS needs: reaction wheels and magnetorquers
- A 30 kg propulsion module.
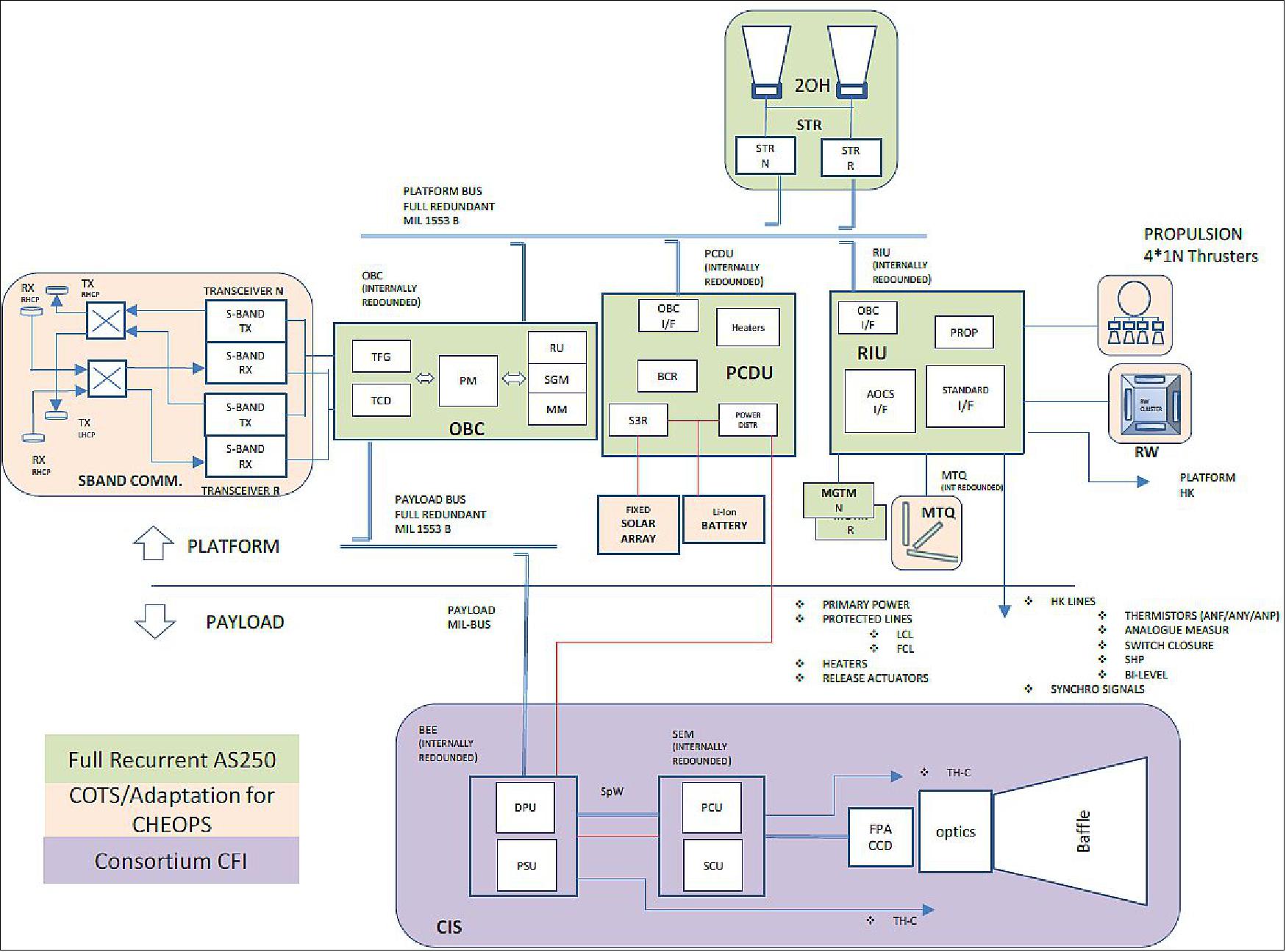
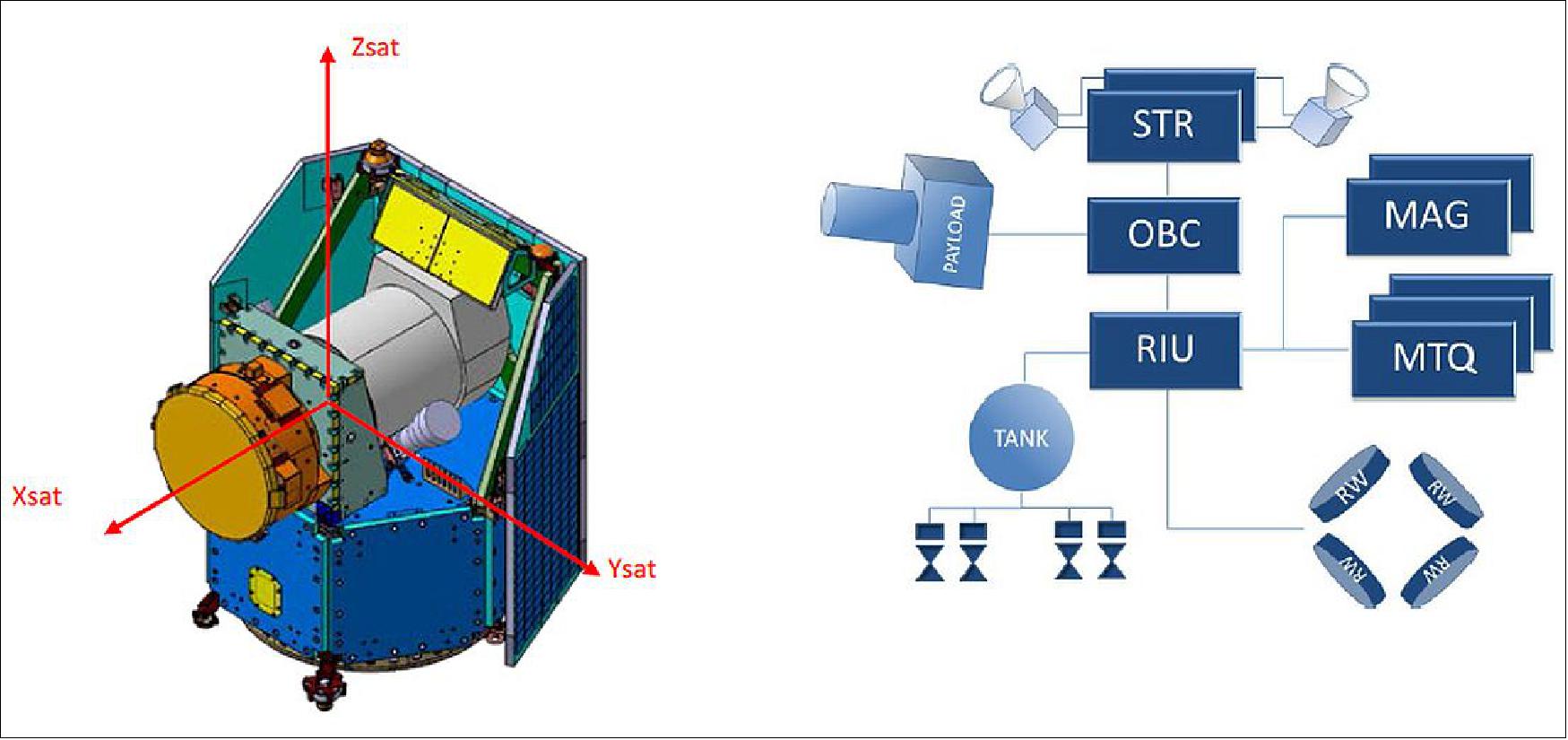
The CHEOPS avionics architecture is built around a core DHS (Data Handling Subsystem) made of the OBC (On-Board Computer), the RIU (Remote Interface Unit), and a set of two redundant 1553 buses, one dedicated to the platform including the power management unit and star tracker, the other dedicated to the instrument.
Analog/discrete interfaces are handled through the RIU that is in charge of acquiring the housekeeping information of the spacecraft. It is also in charge of managing through dedicated boards the propulsion module items (valves, pressure transducer, cat-bed heaters), the AOCS components (magnetometers, magnetorquers and reaction wheels) and to control through high power commands the configuration of the satellite units.
The S-band transceiver and the reaction wheels interface with the RIU through an UART link and further with the OBC through the 1553 RIU interface. These UART interfaces are used for commanding and housekeeping/monitoring telemetry acquisition.
The synchronization between the spacecraft equipment is provided by means of synchronization lines distribution generated by the OBC and distributed via the RIU towards the client units (instrument, star tracker).
The PCDU (Power Conditioning and Distribution Unit) handles the switching and protection of the power lines for all the satellite units. Most units are protected by a LCL (Latch-up Current Limiter) against any over-current anomaly. Vital units, transceiver and the OBC, that allow recovery and controllability of the satellite in case of critical anomaly, are powered through FCLs (Fault Current Limiters) that maintain powering of the protected unit even after an anomaly.
The non-regulated primary power bus is directly connected to the battery. Its voltage is thus fully dependent of the battery state of charge and of the instantaneous power consumption. It ranges from 22 V to a maximum voltage of 34 V. Secondary power distribution is ensured either within the unit for elaborated units [STR (Star Tracker)], or distributed by the RIU for the most elementary ones (AOCS sensors/actuators).
The Solar Array (SA) accommodation to the primary power bus is performed by DET (Direct Energy Transfer) and is implemented by switches in parallel with SA sections (shunt regulation). Excess of SA power is dissipated within the PCDU.
AOCS (Attitude and Orbit Control Subsystem): The CHEOPS AOCS is mostly inherited from the AS250 avionics product line with some adaptations. The AOCS design for CHEOPS has shown that a GPS receiver is not needed, as opposed to the AS250 baseline. Although this decision leads to a lack of an on-board accurate state vector measurement, a two-steps thorough analysis proved the feasibility of the solution despite this modification. First, it was confirmed that science pointing requirements are not degraded by this issue (regarding parallax effects), and second the analysis showed that degradation of performances of on-board AOCS functions using on-board propagated state vector are acceptable (roll guidance, magnetic model and orbit control functions). In order to avoid long term drifting of the onboard propagator, a periodic state vector update from the ground is used, based on Doppler measurements. Another change with respect to the AS250 architecture is the removal of a CSS (Coarse Sun Sensor). Since CHEOPS features a dusk-dawn orbit, the B-dot law used in Safe Mode ensures the convergence of solar arrays towards Sun direction by design, without further reorientation of the axis perpendicular to the orbit as it is the case in a barbecue configuration. This fact renders the CSS unnecessary for this mission. Additionally, the design incorporates payload-based data of the direction of the target star centroid, which is used by the AOCS to estimate and compensate for thermoelastic deformations between the star tracker and the instrument. This approach allows improving the pointing performance of the satellite, reaching a value of a few arcseconds. 14)
The AOCS must ensure an accurate and stable pointing during the observation, with an APE (Attitude Performance Error) of < 4 arcseconds (8 arcseconds in case of optical head failure) at a 68% confidence level. The inertial direction of observation of the star can be selected by the ground segment with the following constraints:
- The Sun must not be inside a cone around the line of sight of the telescope (Sun exclusion angle) of at most 120º
- The target shall not be occulted by the Earth, taking a slightly enhanced Earth radius by 100 km to avoid atmospheric glow
- Additionally, an Earth stray light exclusion angle of 35º and a Moon exclusion angle of 5º are also applicable.
As shown in Figure 9, the X axis of the spacecraft is nominally aligned with the instrument LoS (Line of Sight). This means that there is a degree of freedom around roll axis during observations, since the rotation of the image around the star center is irrelevant for the scientific purposes, because an integration of the incoming light is performed, which is independent of the roll angle. This degree of freedom is used to keep the instrument radiators away from Nadir direction for thermal stability purposes. This is a constraint in the body Z axis which unambiguously defines the reference quaternion to be computed by the guidance law and followed by the control algorithms.
Another important mission constraint is related to the need to avoid the sunlight intrusion in the payload CCD. Indeed, in order to ensure this occurrence immediately launch, a cover is included at the aperture of the instrument which is released after initial stabilization phase. The three-axes attitude control during nominal phases of the mission guarantee by design the compliance of this constraint. For the Safe Mode, an extensive analysis has been conducted to characterize the probability of such event, which proves to be sufficiently low and only possible under very special initial conditions.
Regarding orbit control, the mission needs ΔV maneuvers to correct launcher injection errors, to conduct collision avoidance maneuvers and to carry out a deorbiting campaign at the end of the satellite lifetime. Nevertheless, due to the mission features, orbit control to compensate for disturbance forces is not needed during nominal life, which simplifies the operations on-ground and reduces the propellant budget.
Figure 9 depicts the final architecture implemented for CHEOPS. One compact and accurate multi-head STR (Star Tracker ) is used as attitude sensor for nominal operations. Two optical heads are mounted in a direction close to the instrument line of sight and used in hot redundancy. Two electronic units are embarked also in cold redundancy, each one of them cross-strapped to the two optical heads of the star sensor. The optical heads are accommodated on the payload panel to optimize performance because of lower thermoelastic deformations, and their orientation is chosen to ensure their availability for all mission phases.
A cluster of four reaction wheels is used in hot redundancy for three axes attitude control in normal mode, and three internally redundant magnetorquers are used for wheels offloading. These two groups of actuators are also used in Safe Mode, where the magnetorquers also provide attitude control. Two magnetometers are used for magnetic field measurement in Safe Mode.
The propulsion subsystem simple architecture reduces overall mass, propellant and cost (including design and integration). Uniquely used for orbit corrections, it is based on four thrusters aligned in the same direction and one tank of mono propellant. As the propulsion subsystem is never used for Safe Mode neither for normal operations outside orbit corrections, it allows decreasing the required propellant mass. Furthermore, this architecture has been extensively used in other projects with promising results.
RF Communications
The communications subsystem has been designed to meet the uplink and downlink requirements considering that the baseline nominal ground station is located at Torrejon and the backup station is Vilspa-1. The use of Kiruna or Svalbard stations is a possible option to increase LEOP and/or decommissioning coverage. The CHEOPS proposed communications subsystem is based on the following architecture. 15)
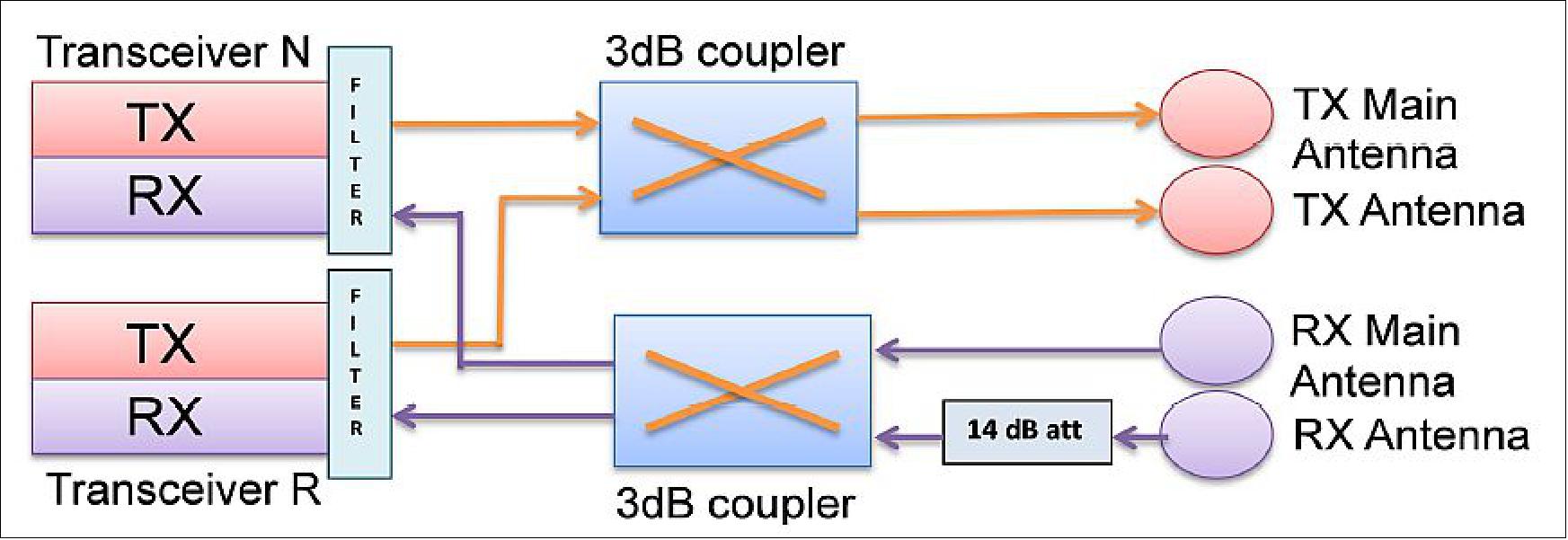
This subsystem is composed by two transceivers (nominal and redundant), two couplers and four patch antennas (two for transmission and two for reception). The transceivers include a transmitter, in cold redundancy with the one in the other chain, a receiver, in hot redundancy with the one in the other chain, and adequate filtering to ensure self-compatibility and avoid interferences.
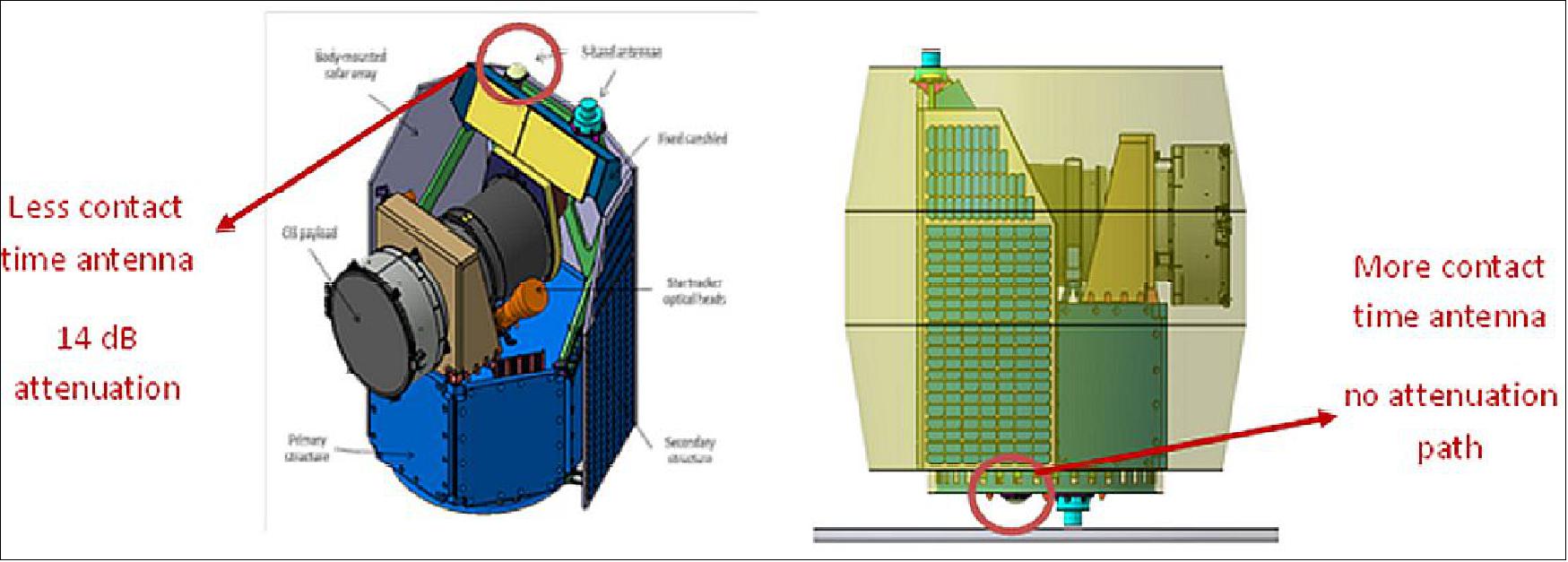
The architecture considers antennas with the same circular polarization (RHCP) for the uplink. In order to avoid signal cancelling, and discriminate the two different paths, there is a privileged path with no attenuation, and an attenuated path with 14 dB attenuation. Therefore, in case of signal combination, no destructive results will appear.
For the downlink, different circular polarization (RHCP and LHCP) will be used for each antenna. Due to CHEOPS mission attitude, there will be a change from one antenna (one polarization) to the other antenna (other polarization) during one pass. Therefore, it requires the ground station capability to simultaneously receive both polarizations and be able to select the best signal.
Frequency | 2033.66 MHz |
TC modulation | 16 kHz subcarrier PM |
Bit rate (RF) | 4 kbit/s |
Encoding | Pseudo-randomization decoding performed at OBC |
Acquisition | Threshold: -120 dBm carrier ±140 kHz @32 kHz/s |
Tracking | Threshold: -125 dBm carrier ±140 kHz @32 kHz/s |
Receiver noise figure | ≤ 3 dB |
Power consumption | 4.5 W (per receiver) |
Frequency | 2208.5 MHz |
TM modulation | SRRC (Square-Root Raised Cosine Signals), OQPSK (Offset Quadrature-Phase Shift Keying) |
Bit rate (RF) | 1143 kbit/s |
Output power | 33 dBm (2 W) |
Bandwidth @99% power | 1,5 MHz |
SRRC roll-off | 0.50 |
Encoding | Reed Solomon (255,223) (performed at OBC), Pseudo-randomization (performed at OBC) |
Power consumption | 14 W per transmitter |

Customer | ESA (European Space Agency) |
Primary goal | Characterize transiting exoplanets orbiting bright host stars |
Targets | Known exoplanet host stars with a V-magnitude ≤ 12 anywhere in the sky |
Spacecraft characteristics | Size: 1,6 m height, 290 kg mass, 200 W nominal operation, 30 kg propulsion tank |
On board image memory | Solid State Mass Memory in OBC up to 3.8 Gbit |
Launch | End Q2 2018 (shared flight opportunity) |
Mission | Lifetime: 3.5 years science operations (5 years goal) – First S-class mission in Cosmic Vision 2015-2025 and the first one Airbus DS Spain has won in an open competition |
Instrument | On axis telescope with a diameter of 32 cm; capability of determining planets radii within ~10% accuracy |
AOCS | Three-axis satellite attitude control and instrument-in-the-loop. |
Airbus DS responsibilities | AIRBUS DS Spain was awarded with the contract to manufacture and integrate the satellite platform, the integration of the scientific instrument, the realization of the satellite functional and environmental campaigns, the launch campaign and the LEOP and IOC phases |
Launch
The CHEOPS minisatellite was launched as a secondary payload on 18 December 2019 (08:54:20 UTC)on an Arianespace Soyuz rocket, designated VS23, from the the Guiana Space Center in Kourou. — The primary mission on this Soyuz flight is the first COSMO-SkyMed Second Generation (CSG-1), radar surveillance satellite for ASI, the Italian space agency. The Soyuz 2-1b (Soyuz ST-B) rocket used a Fregat upper stage. It provided an estimated total lift performance of 3,250 kg, including the satellites and ASAP-S multi-passenger dispenser system. Flight VS23 was Arianespace’s third launch in 2019 using a medium-lift Soyuz, and the ninth overall this year across its full family of launchers – which also includes the heavy-lift Ariane 5 and lightweight Vega. 17) 18) 19)
Orbit: The CHEOPS baseline orbit satisfying the science requirements is a 6:00 hr (baseline) or 18:00 hr (backup) sun-synchronous orbit (dawn/dusk orbit). The two satellites will separate in turn into their own orbits soon after ascent, with CHEOPS operating in LEO (Low Earth Orbit) at an altitude of 700 km and an inclination of ~98º, enabling to have the Sun permanently on the backside of the satellite and minimizing Earth straylight.
Secondary Payloads
• CHEOPS (CHaracterizing ExOPlanets Satellite) minisatellite of ESA with a mass of ~300 kg.
• EyeSat, a 3U CubeSat (5 kg) student satellite of the University Technological Institute (IUT) in Cachan, France and CNES.
• ANGELS (ARGOS Néo on a Generic Economical and Light Satellite), a microsatellite (30 kg) of CNES and NEXEYA, an innovative industrial group active in the aerospace market.
• OPS-SAT, a 3U CubeSat (6 kg) of ESA/ESOC that will allow on-orbit testing and demonstration of experimental and innovative software that may be used in future ESA missions and programs.
The CHEOPS satellite will observe individual bright stars that are known to host exoplanets, in particular those in the Earth-to-Neptune size range. By targeting known planets, CHEOPS will know exactly when and where to point to catch the exoplanet as it transits across the disk of its host star. Its ability to observe multiple transits of each planet will enable scientists to achieve the high-precision transit signatures that are needed to measure the sizes of small planets.
Legend to Figure 15: In this view the satellite's telescope points to several different stars, one after the other. The beam represents the light from the star that CHEOPS is observing at a given point in time.
Mission Status
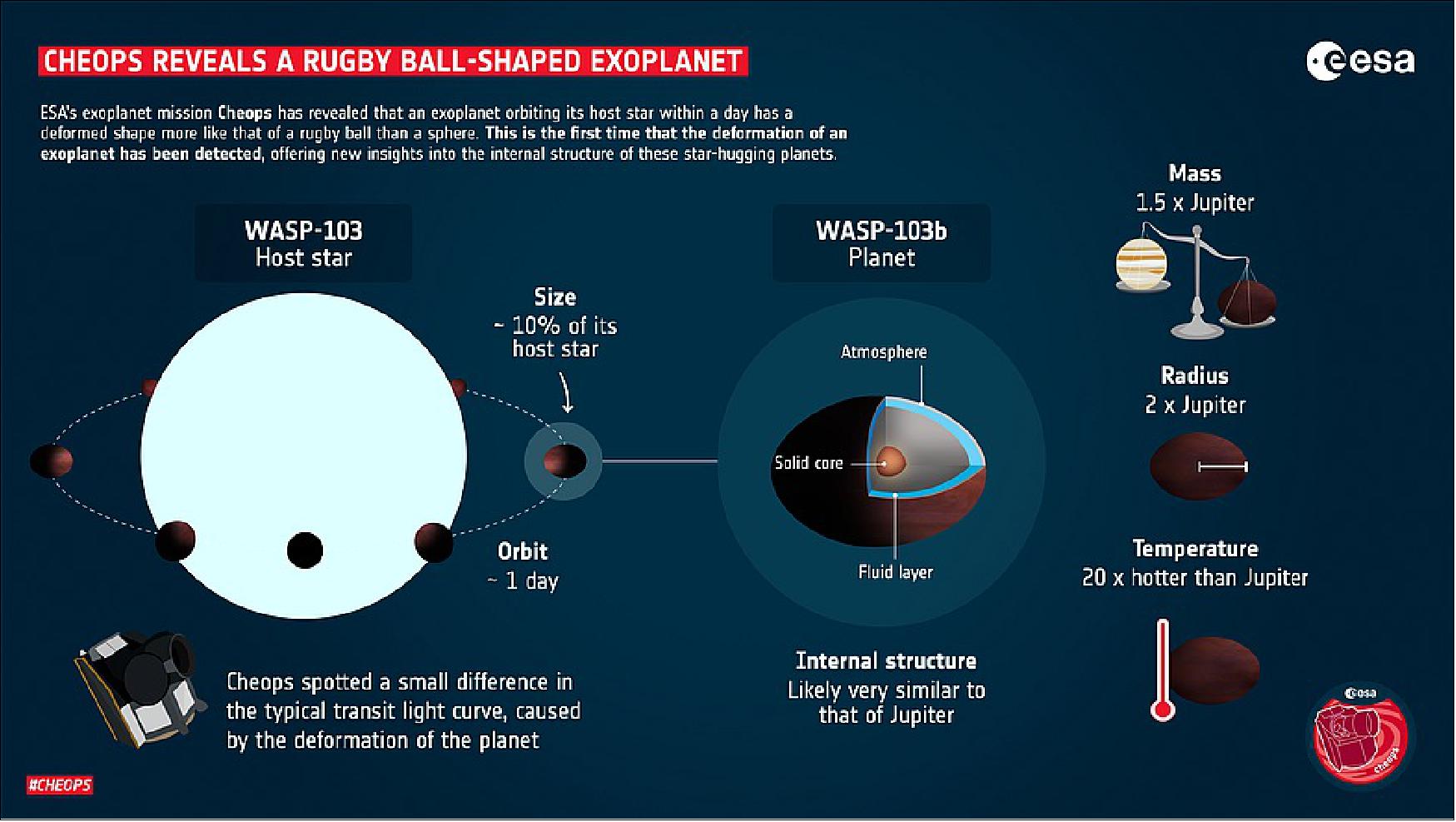
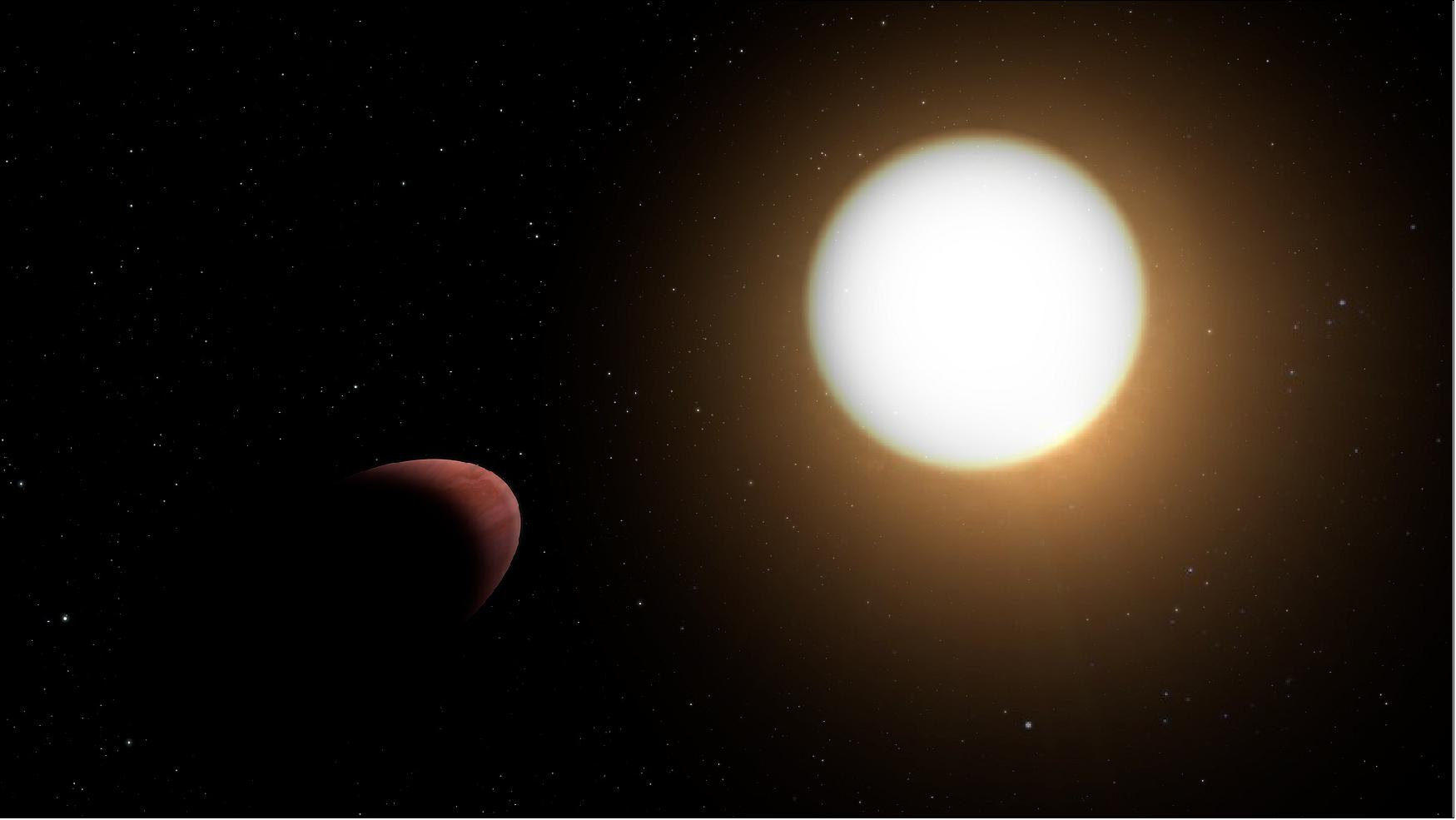
• January 10, 2022: ESA’s exoplanet mission Cheops has revealed that an exoplanet orbiting its host star within a day has a deformed shape more like that of a rugby ball than a sphere. This is the first time that the deformation of an exoplanet has been detected, offering new insights into the internal structure of these star-hugging planets. 21)
- The planet, known as WASP-103b is located in the constellation of Hercules. It has been deformed by the strong tidal forces between the planet and its host star WASP-103, which is about 200 degrees hotter and 1.7 times larger than the Sun.
Tidal tug
- We experience tides in the oceans of Earth mainly due to the Moon tugging slightly on our planet as it orbits us. The Sun also has a small but significant effect on tides, however it is too far from Earth to cause major deformations of our planet. The same cannot be said for WASP-103b, a planet almost twice the size of Jupiter with 1.5 times its mass, orbiting its host star in less than a day. Astronomers have suspected that such a close proximity would cause monumental tides, but up until now they haven’t been able to measure them.
- Using new data from ESA’s Cheops space telescope, combined with data that had already been obtained by the NASA/ESA Hubble Space Telescope and NASA’s Spitzer Space Telescope, astronomers have now been able to detect how tidal forces deform exoplanet WASP-103b from a usual sphere into a rugby ball shape. 22)
- Cheops measures exoplanet transits – the dip in light caused when a planet passes in front of its star from our point of view. Ordinarily, studying the shape of the light curve will reveal details about the planet such as its size. The high precision of Cheops together with its pointing flexibility, which enables the satellite to return to a target and to observe multiple transits, has allowed astronomers to detect the minute signal of the tidal deformation of WASP-103b. This distinct signature can be used to unveil even more about the planet.
- “It’s incredible that Cheops was actually able to reveal this tiny deformation,” says Jacques Laskar of Paris Observatory, Université Paris Sciences et Lettres, and co-author of the research. “This is the first time such analysis has been made, and we can hope that observing over a longer time interval will strengthen this observation and lead to better knowledge of the planet’s internal structure."
Inflated planet
- The team was able to use the transit light curve of WASP-103b to derive a parameter – the Love number – that measures how mass is distributed within a planet. Understanding how mass is distributed can reveal details on the internal structure of the planet.
- “The resistance of a material to being deformed depends on its composition,” explains Susana Barros of Instituto de Astrofísica e Ciências do Espaço and University of Porto, Portugal, and lead author of the research. “For example, here on Earth we have tides due to the Moon and the Sun but we can only see tides in the oceans. The rocky part doesn’t move that much. By measuring how much the planet is deformed we can tell how much of it is rocky, gaseous or water.”
- The Love number for WASP-103b is similar to Jupiter, which tentatively suggests that the internal structure is similar, despite WASP-103b having twice the radius.
- In principle we would expect a planet with 1.5 times the mass of the Jupiter to be roughly the same size, so WASP-103b must be very inflated due to heating from its star and maybe other mechanisms,” says Susana.
- “If we can confirm the details of its internal structure with future observations maybe we could better understand what makes it so inflated. Knowing the size of the core of this exoplanet will also be important to better understand how it formed.”
- Since the uncertainty in the Love number is still quite high, it will take future observations with Cheops and the James Webb Space Telescope (Webb) to decipher the details. The extremely high precision of Webb will improve the measurements of tidal deformation of exoplanets, enabling a better comparison between these so-called “hot Jupiters” and giant planets in the Solar System.
Mysterious motion
- Another mystery also surrounds WASP-103b. The tidal interactions between a star and a very close-in Jupiter-sized planet would usually cause the planet’s orbital period to shorten, bringing it gradually closer to the star before it is eventually engulfed by the parent star. However, measurements of WASP-103b seem to indicate that the orbital period might be increasing and that the planet is drifting slowly away from the star. This would indicate that something other than tidal forces is the dominant factor affecting this planet.
- Susana and her colleagues looked at other potential scenarios, such as a companion star to the host affecting the dynamics of the system or the orbit of the planet being slightly elliptical. They weren’t able to confirm these scenarios, but couldn’t rule them out either. It is also possible that the orbital period is actually decreasing, rather than increasing, but only additional observations of the transits of WASP-103b with Cheops and other telescopes will help shed light on this mystery.
- “The size of the effect of tidal deformation on an exoplanet transit light curve is very small, but thanks to the very high precision of Cheops we are able to see this for the first time,” says ESA’s Project Scientist for Cheops, Kate Isaak. “This study is an excellent example of the very diverse questions that exoplanet scientists are able to tackle with Cheops, illustrating the importance of this flexible follow-up mission.”
• June 28, 2021: While exploring two exoplanets in a bright nearby star system, ESA’s exoplanet-hunting Cheops satellite has unexpectedly spotted the system’s third known planet crossing the face of the star. This transit reveals exciting details about a rare planet “with no known equivalent”, say the researchers. 23)
- The discovery is one of the first results from ESA’s Cheops (CHaracterising ExOPlanet Satellite), and the first time an exoplanet with a period of over 100 days has been spotted transiting a star that is bright enough to be visible to the naked eye.
- Named Nu2 Lupi, this bright, Sun-like star is located just under 50 light-years away from Earth in the constellation of Lupus (the Wolf). In 2019, the High Accuracy Radial velocity Planet Searcher (HARPS) at the ESO 3.6-meter telescope in Chile discovered three exoplanets (named ‘b’, ‘c’ and ‘d’, with the star deemed to be object ‘A’) in the system, with masses between those of Earth and Neptune and orbits lasting 11.6, 27.6 and 107.6 days. The innermost two of these planets – b and c – were subsequently found to transit Nu2 Lupi by NASA's Transiting Exoplanet Survey Satellite (TESS), making it one of only three naked-eye stars known to host multiple transiting planets.
- “Transiting systems such as Nu2 Lupi are of paramount importance in our understanding of how planets form and evolve, as we can compare several planets around the same bright star in detail,” says Laetitia Delrez of the University of Liège, Belgium, and lead author of the new finding.
- “We set out to build on previous studies of Nu2 Lupi and observe planets b and c crossing the face of Nu2 Lupi with Cheops, but during a transit of planet c we spotted something amazing: an unexpected transit by planet ‘d’, which lies further out in the system.”
![Figure 18: This infographic reveals the details of the Nu2 Lupi planetary system, which was recently explored by ESA’s exoplanet watcher Cheops. - This bright, Sun-like star is located just under 50 light-years away from Earth in the constellation of Lupus (the Wolf), as shown to the left of the frame, and is known to host three planets (named ‘b’, ‘c’ and ‘d’, with the star deemed to be object ‘A’). The relative sizes, orbital periods, and possible compositions of these three planets are depicted to the centre and lower right of the frame, while planet d’s comparative position within our Solar System is shown to the upper right (as defined by the amount of incident light it receives from its star, Nu2 Lupi), - Cheops explored this planetary system to better characterize its two inner planets, b and c, as these were known to pass in front of their host star (a ‘transit’). However, while doing so, Cheops unexpectedly spotted planet d also transiting Nu2 Lupi – the first time an exoplanet with a period of over 100 days has been spotted transiting a star bright enough to be visible to the naked eye. -Transits create the valuable opportunity to study a planet’s atmosphere, orbit, size and interior, and allow scientists to compare multiple planets around the same star to understand how they have formed and evolved. The transiting behavior of all three planets of the Nu2 Lupi system enabled Cheops to refine the planetary characteristics and compositions depicted here [image credit: ESA; data: L. Delrez et al (2021)]](https://eoportal.org/ftp/satellite-missions/c/Cheops_110122/Cheops_Auto2B.jpeg)
- Using the high-precision capabilities of Cheops, planet d was found to be about 2.5 times the radius of Earth, confirmed to take just over 107 days to loop once around its star and, using archival observations from ground-based telescopes, found to have a mass of 8.8 times that of Earth.
- “The amount of stellar radiation reaching planet d is also mild in comparison to many other discovered exoplanets; in our Solar System, Nu2 Lupi d would orbit between Mercury and Venus,” adds co-author David Ehrenreich of the University of Geneva, Switzerland. “Combined with its bright parent star, long orbital period, and suitability for follow-up characterization, this makes planet d hugely exciting – it is an exceptional object with no known equivalent, and sure to be a golden target for future study.”
- Most long-period transiting exoplanets discovered to date have been found around stars that are too faint to allow detailed follow-up observations, meaning that little is known about their planets’ properties. Nu2 Lupi, however, is bright enough to be an attractive target for other powerful telescopes based in space — such as the NASA/ESA Hubble Space Telescope or the forthcoming NASA/ESA/CSA James Webb Space Telescope — or large observatories on the ground.
- “Given its overall properties and orbit, this makes planet d a uniquely favorable target for studying an exoplanet with a mild-temperature atmosphere around a star similar to the Sun,” says Laetitia.
- By combining new Cheops data with archival data from other observatories, the researchers were able to accurately determine the mean densities of all of Nu2 Lupi’s known planets, and put strong constraints on their possible compositions.
- They found planet b to be mainly rocky, while planets c and d appear to contain large amounts of water enshrouded in envelopes of hydrogen and helium gases. In fact, planets c and d contain far more water than Earth: a quarter of each planet’s mass is made up of water, compared to less than 0.1% for Earth. This water, however, is not liquid, instead taking the form of high-pressure ice or high-temperature steam.
- “While none of these planets would be habitable, their diversity makes the system even more exciting, and a great future prospect for testing how these bodies form and change over time,” says ESA Cheops project scientist Kate Isaak. “There is also the potential to search for rings or moons in the Nu2 Lupi system, as the exquisite precision and stability of Cheops could allow detection of bodies down to roughly the size of Mars.“
- Cheops is designed to collect ultra-high precision data of individual stars known to host planets, rather than sweeping more generally for possible exoplanets around many stars – and this focus and precision is proving exceptionally useful in understanding the star systems around us.
- “These exciting results demonstrate once again the huge potential of Cheops,” adds Kate. “Cheops will allow us not just to better understand known exoplanets, as shown in this and other early results from the mission, but also to discover new ones and reveal their secrets.” 24)
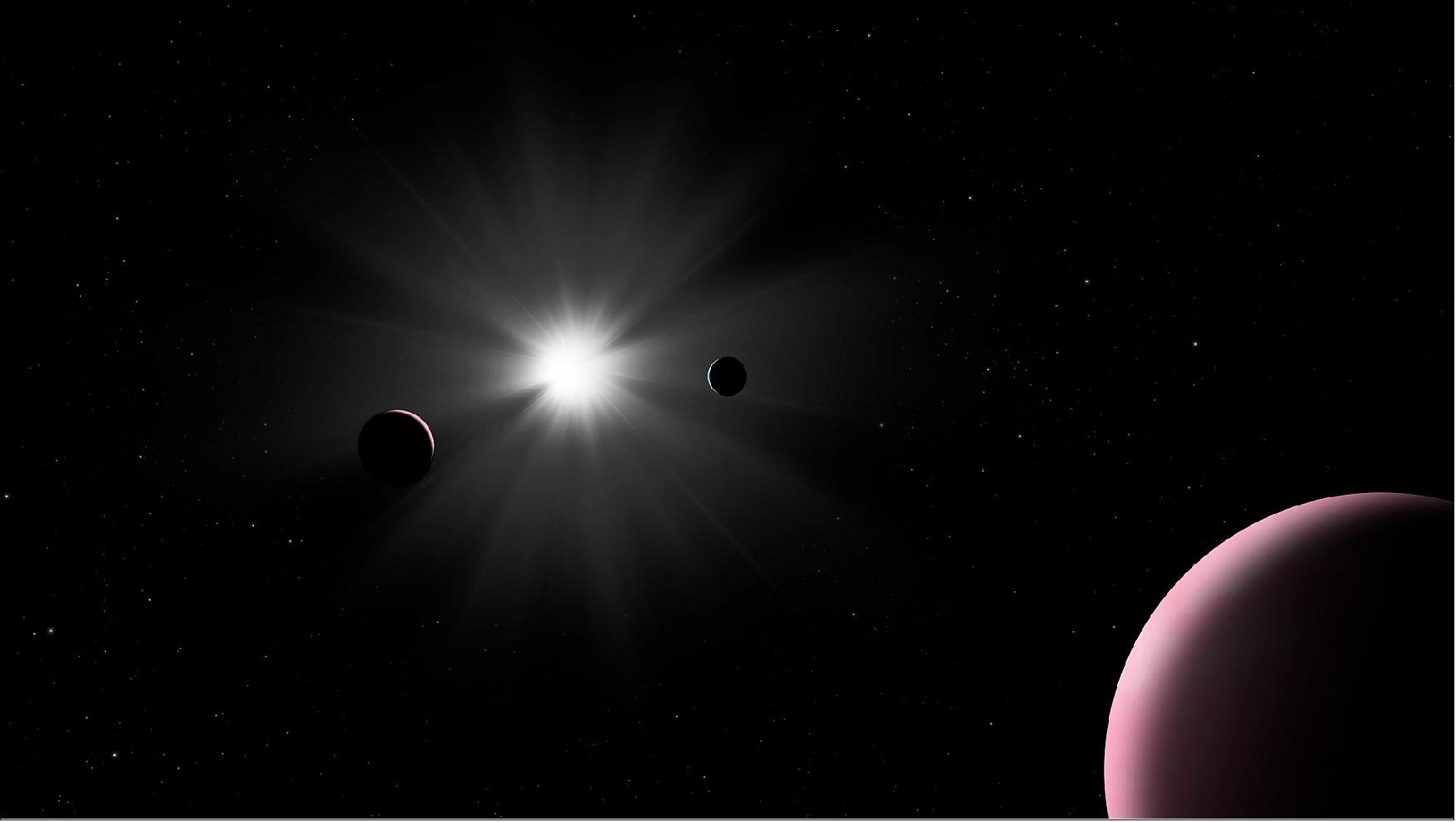
• January 25, 2021: ESA’s exoplanet mission Cheops has revealed a unique planetary system consisting of six exoplanets, five of which are locked in a rare rhythmic dance as they orbit their central star. The sizes and masses of the planets, however, don’t follow such an orderly pattern. This finding challenges current theories of planet formation. 25)
- The discovery of increasing numbers of planetary systems, none like our own Solar System, continues to improve our understanding of how planets form and evolve. A striking example is the planetary system called TOI-178, some 200 light-years away in the constellation of Sculptor.
- Astronomers already expected this star to host two or more exoplanets after observing it with NASA’s Transiting Exoplanet Survey Satellite (TESS). New, highly precise observations with Cheops, ESA’s Characterizing Exoplanet Satellite that was launched in 2019, now show that TOI-178 harbors at least six planets and that this foreign solar system has a very unique layout. The team, led by Adrien Leleu of University of Geneva and the University of Bern in Switzerland, published their results today in Astronomy & Astrophysics. 26)
- One of the special characteristics of the TOI-178 system that the scientists were able to uncover with Cheops is that the planets – except the one closest to the star – follow a rhythmic dance as they move in their orbits. This phenomenon is called orbital resonance, and it means that there are patterns that repeat themselves as the planets go around the star, with some planets aligning every few orbits.
- A similar resonance is observed in the orbits of three of Jupiter’s moons: Io, Europa and Ganymede. For every orbit of Europa, Ganymede completes two orbits, and Io completes four (this is a 4:2:1 pattern).
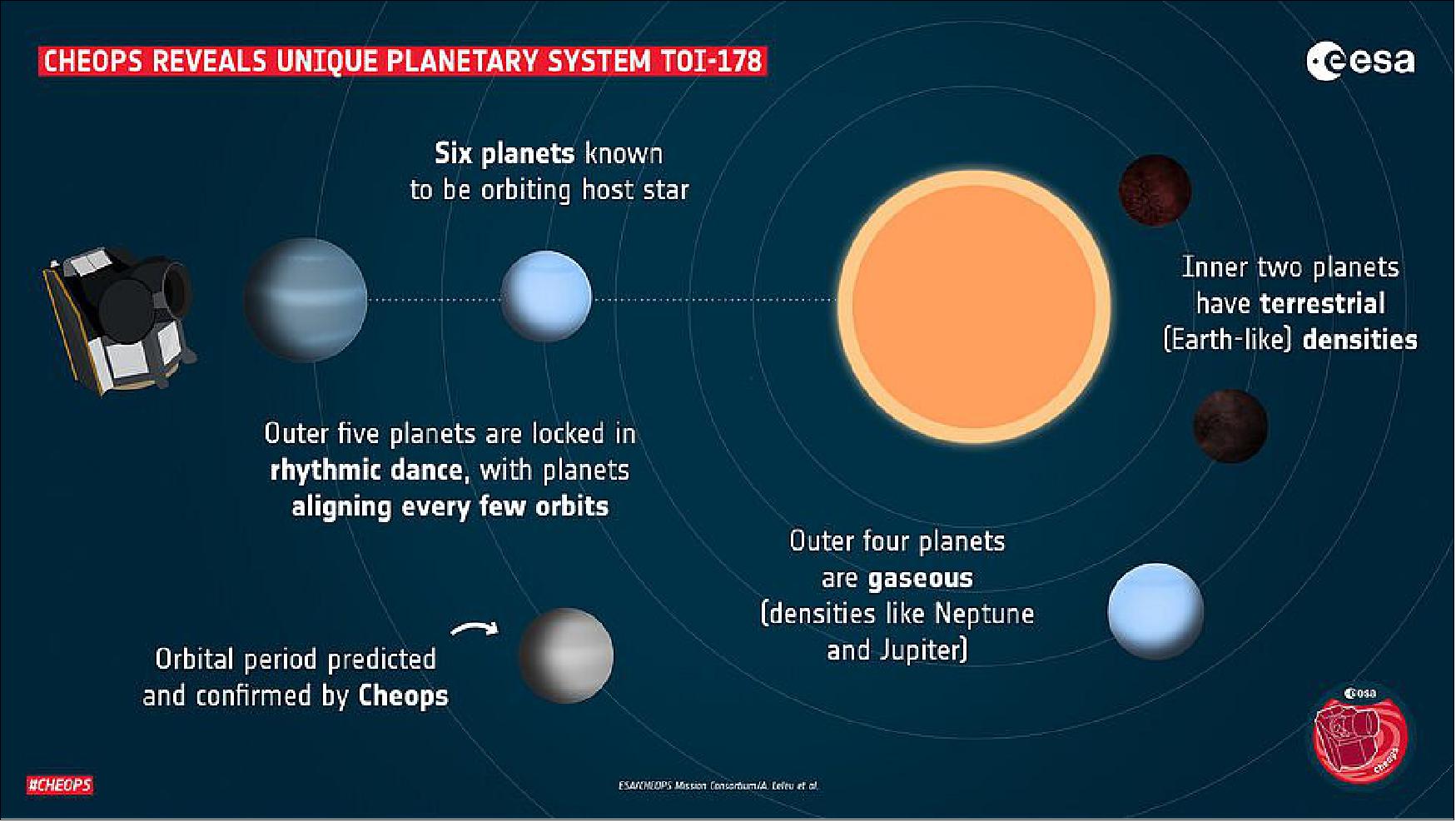
- In the TOI-178 system, the resonant motion is much more complex as it involves five planets, following a 18:9:6:4:3 pattern. While the second planet from the star (the first in the pattern) completes 18 orbits, the third planet from the star (second in the pattern) completes nine orbits, and so on.
- Initially, the scientists only found four of the planets in resonance, but by following the pattern the scientists calculated that there must be another planet in the system (the fourth following the pattern, the fifth planet from the star).
- “We predicted its trajectory very precisely by assuming that it was in resonance with the other planets,” Adrien explains. An additional observation with Cheops confirmed that the missing planet indeed existed in the predicted orbit.
- After they had uncovered the rare orbital arrangements, the scientists were curious to see whether the planet densities (size and mass) also follow an orderly pattern. To investigate this, Adrien and his team combined data from Cheops with observations taken with ground-based telescopes at the European Southern Observatory’s (ESO) Paranal Observatory in Chile. 27)
- But while the planets in the TOI-178 system orbit their star in a very orderly manner, their densities do not follow any particular pattern. One of the exoplanets, a dense, terrestrial planet like Earth is right next to a similar-sized but very fluffy planet – like a mini-Jupiter, and next to that is one very similar to Neptune.
- “This is not what we expected, and is the first time that we observe such a setup in a planetary system,” says Adrien. “In the few systems we know where the planets orbit in this resonant rhythm, the densities of the planets gradually decrease as we move away from the star, and it is also what we expect from theory.”
- Catastrophic events such as giant impacts could normally explain large variations in planet densities, but the TOI-178 system would not be so neatly in harmony if that had been the case.
- “The orbits in this system are very well ordered, which tells us that this system has evolved quite gently since its birth,” explains co-author Yann Alibert from the University of Bern.
- Revealing the complex architecture of the TOI-178 system, which challenges current theories of planet formation, was made possible thanks to almost 12 days of observations with Cheops (11 days of continuous observations, plus two shorter observations).
- “Solving this exciting puzzle required quite some effort to plan, in particular to schedule the 11-day continuous observation needed in order to catch the signatures of the different planets,” says ESA Cheops project scientist Kate Isaak. “This study highlights very nicely the follow-up potential of Cheops – not only to better characterize known planets, but to hunt down and confirm new ones.”
- Adrien and his team want to continue to use Cheops to study the TOI system in even more detail.
- “We might find more planets that could be in the habitable zone – where liquid water might be present on the surface of a planet – which begins outside of the orbits of the planets that we discovered to date,” says Adrien. “We also want to find out what happened to the innermost planet that is not in resonance with the others. We suspect that it broke out of resonance due to tidal forces.”
- Astronomers will use Cheops to observe hundreds of known exoplanets orbiting bright stars.
- “Cheops will not only deepen our understanding of the formation of exoplanets, but also that of our own planet and the Solar System,” adds Kate.
• September 28, 2020: ESA’s new exoplanet mission, Cheops, has found a nearby planetary system to contain one of the hottest and most extreme extra-solar planets known to date: WASP-189 b. The finding, the very first from the mission, demonstrates Cheops’ unique ability to shed light on the Universe around us by revealing the secrets of these alien worlds. 28)
- Launched in December 2019, Cheops (Characterizing Exoplanet Satellite) is designed to observe nearby stars known to host planets. By ultra-precisely measuring changes in the levels of light coming from these systems as the planets orbit their stars, Cheops can initially characterize these planets — and, in turn, increase our understanding of how they form and evolve.
- The new finding concerns a so-called ‘ultra-hot Jupiter’ named WASP-189 b. Hot Jupiters, as the name suggests, are giant gas planets a bit like Jupiter in our own Solar System; however, they orbit far, far closer to their host star, and so are heated to extreme temperatures.
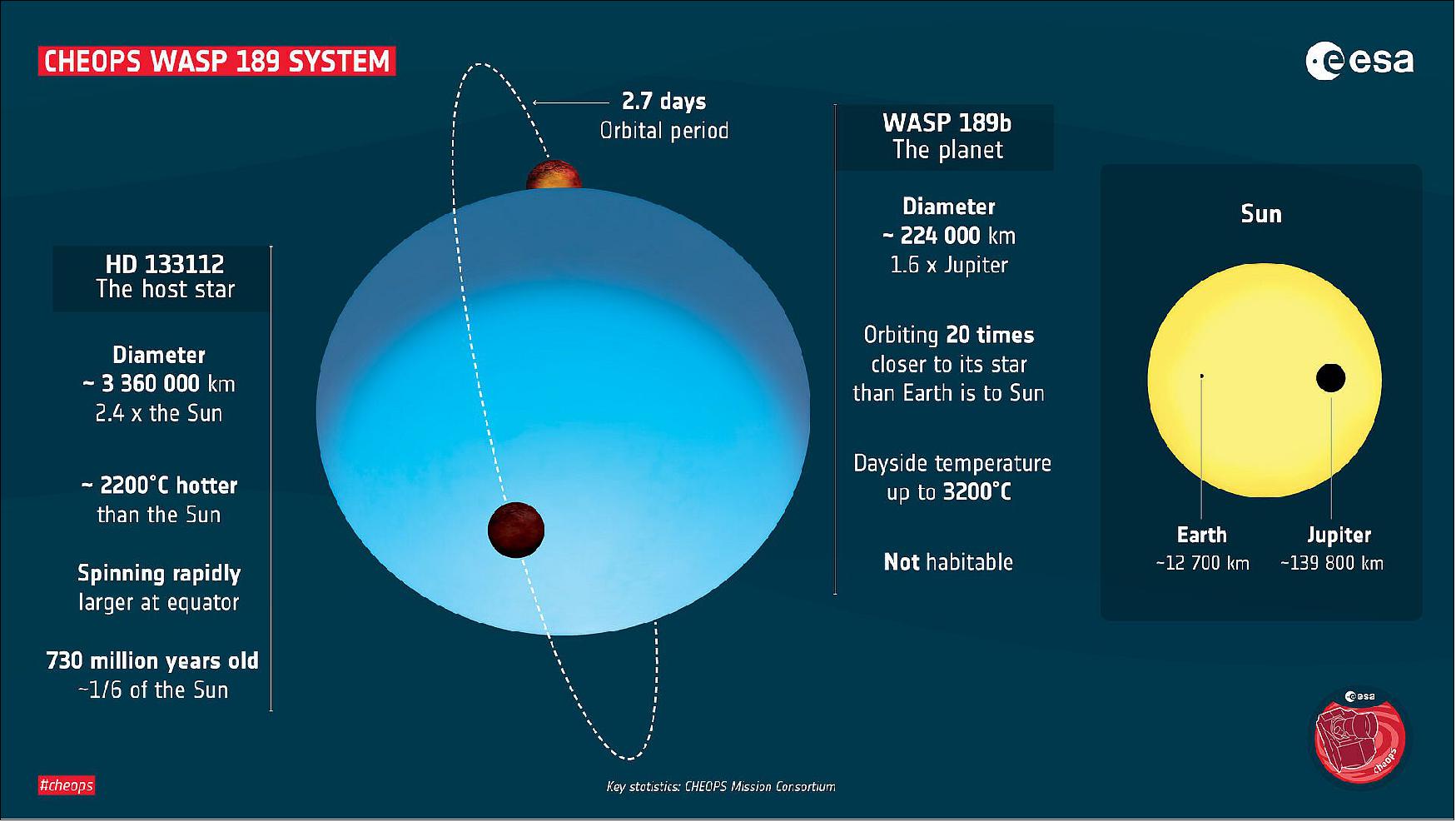
- WASP-189 b sits around 20 times closer to its star than Earth does to the Sun, and completes a full orbit in just 2.7 days. Its host star is larger and more than 2000 degrees hotter than the Sun, and so appears to glow blue. “Only a handful of planets are known to exist around stars this hot, and this system is by far the brightest,” says Monika Lendl of the University of Geneva, Switzerland, lead author of the new study. “WASP-189b is also the brightest hot Jupiter that we can observe as it passes in front of or behind its star, making the whole system really intriguing.” 29)
- First, Monika and colleagues used Cheops to observe WASP-189 b as it passed behind its host star – an occultation. “As the planet is so bright, there is actually a noticeable dip in the light we see coming from the system as it briefly slips out of view,” explains Monika. “We used this to measure the planet’s brightness and constrain its temperature to a scorching 3200ºC.”
- This makes WASP-189 b one of the hottest and most extreme planets, and entirely unlike any of the planets of the Solar System. At such temperatures, even metals such as iron melt and turn to gas, making the planet a clearly uninhabitable one.
- Next, Cheops watched as WASP-189 b passed in front of its star – a transit. Transits can reveal much about the size, shape, and orbital characteristics of a planet. This was true for WASP-189 b, which was found to be larger than thought at almost 1.6 times the radius of Jupiter.
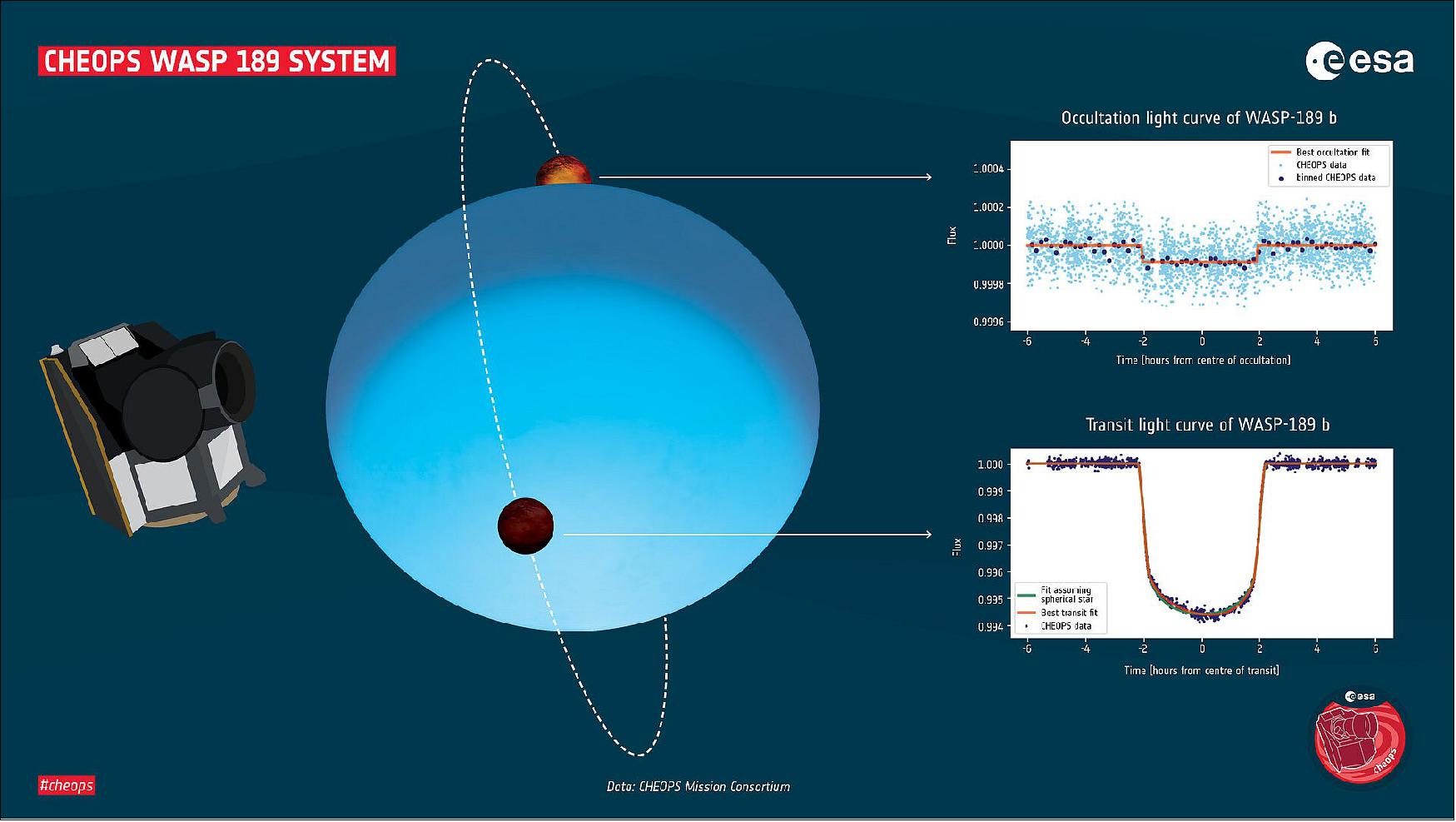
- “We also saw that the star itself is interesting – it’s not perfectly round, but larger and cooler at its equator than at the poles, making the poles of the star appear brighter,” says Monika. “It’s spinning around so fast that it’s being pulled outwards at its equator! Adding to this asymmetry is the fact that WASP-189 b’s orbit is inclined; it doesn’t travel around the equator, but passes close to the star’s poles.”
- Seeing such a tilted orbit adds to the existing mystery of how hot Jupiters form. For a planet to have such an inclined orbit, it must have formed further out and then been pushed inwards. This is thought to happen as multiple planets within a system jostle for position, or as an external influence – another star, for instance – disturbs the system, pushing gas giants towards their star and onto very short orbits that are highly tilted. “As we measured such a tilt with Cheops, this suggests that WASP-189 b has undergone such interactions in the past,” adds Monika.
- Monika and colleagues used Cheops’ highly precise observations and optical capabilities to reveal the secrets of WASP-189 b. Cheops opened its ‘eye’ in January of this year and began routine science operations in April, and has been working to expand our understanding of exoplanets and the nearby cosmos in the months since.
- “This first result from Cheops is hugely exciting: it is early definitive evidence that the mission is living up to its promise in terms of precision and performance,” says Kate Isaak, Cheops project scientist at ESA.
- Thousands of exoplanets, the vast majority with no analogues in our Solar System, have been discovered in the past quarter of a century, with many more to come from both current and future ground-based surveys and space missions.
- “Cheops has a unique ‘follow-up’ role to play in studying such exoplanets,” adds Kate. “It will search for transits of planets that have been discovered from the ground, and, where possible, will more precisely measure the sizes of planets already known to transit their host stars. By tracking exoplanets on their orbits with Cheops, we can make a first-step characterization of their atmospheres and determine the presence and properties of any clouds present.”
- In the next few years, Cheops will follow up on hundreds of known planets orbiting bright stars, building on and extending what has been done here for WASP-189b. The mission is the first in a series of three ESA science missions focusing on exoplanet detection and characterization: it has significant discovery potential also – from identifying prime targets for future missions that will probe exoplanetary atmospheres to searching for new planets and exomoons.
- “Cheops will not only deepen our understanding of exoplanets,” says Kate, "but also that of our own planet, Solar System, and the wider cosmic environment.”
• July 27, 2020: Is there a planet like our Earth out there? Scientists have discovered over 4000 exoplanets, or planets outside of our Solar System, that ESA's CHEOPS satellite will study in depth. Project scientist Kate Isaak discusses the types of exoplanets discovered and what we can learn from them. 30)
• April 16, 2020: Cheops, ESA’s new exoplanet mission, has successfully completed its almost three months of in-orbit commissioning, exceeding expectations for its performance. The satellite, which will commence routine science operations by the end of April, has already obtained promising observations of known exoplanet-hosting stars, with many exciting discoveries to come. 31)
- “The in-orbit commissioning phase was an exciting period, and we are pleased we were able to meet all requirements,” says Nicola Rando, Cheops project manager at ESA. “The satellite platform and instrument performed remarkably, and both the Mission and Science Operation Centers supported operations impeccably.”
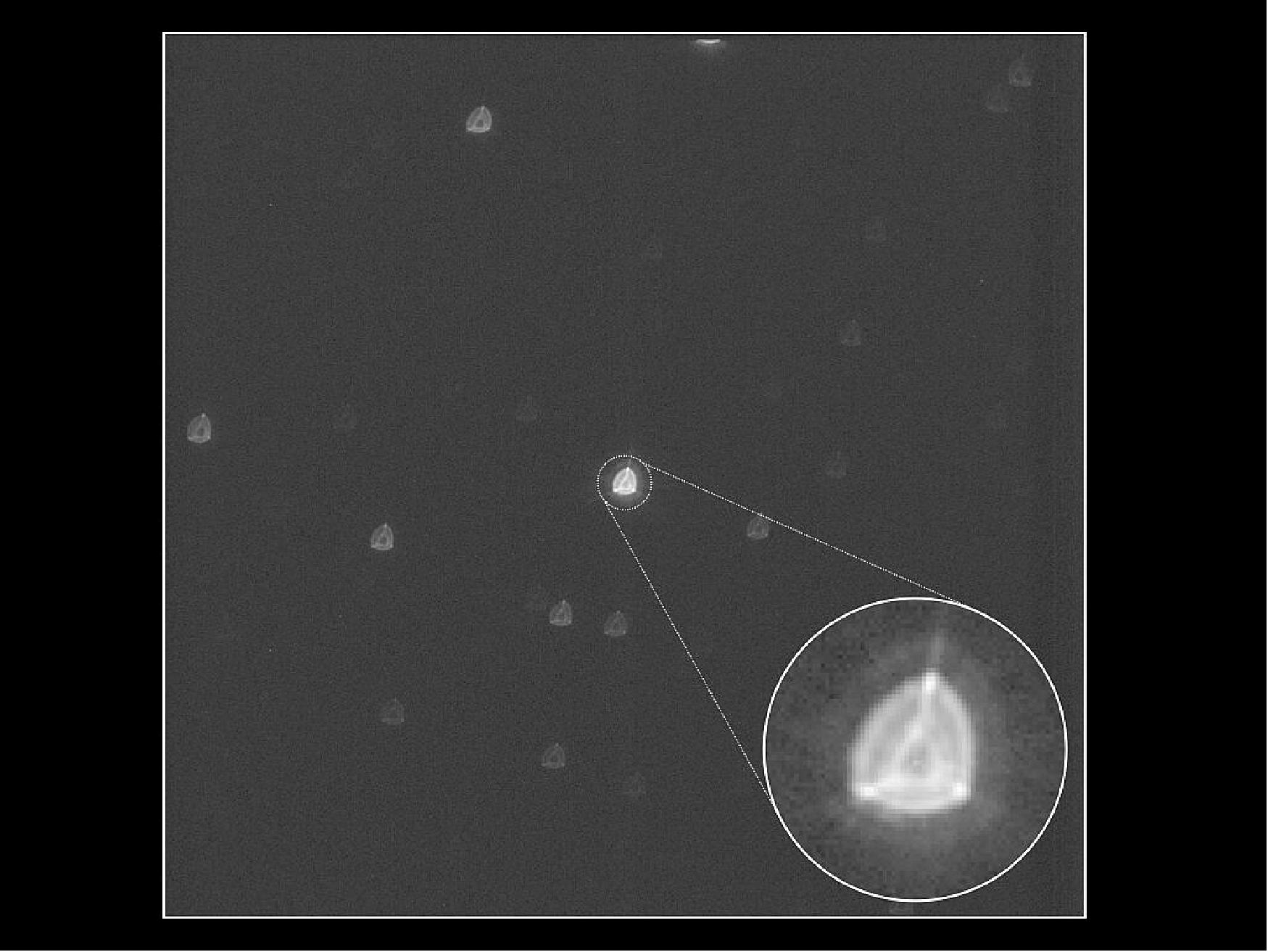
- Launched in December 2019, Cheops opened its eye to the Universe at the end of January and shortly after took its first, intentionally blurred images of stars. The deliberate defocusing is at the core of the mission’s observing strategy, which improves the measurement precision by spreading the light coming from distant stars over many pixels of its detector.
- Precision is key in today’s exoplanet research. More than 4000 planets – and counting – are known to be orbiting stars other than the Sun. A key follow-on is to start to characterize these planets, providing constraints on their structure, formation and evolution.
- Taking the steps to characterize exoplanets through the precise measurement of their sizes – in particular those of smaller planets – is exactly the mission of Cheops. Before being declared ready for the task, however, the small, 1.5 meter sized satellite had to pass a large number of tests.
Performance
- With the first series of in-flight tests, performed between January and February, the mission experts started analyzing the response of the satellite, and in particular of the telescope and detector, in the actual space environment. Proceeding into March, Cheops focused on well-studied stars.
- “To measure how well Cheops performs we first needed to observe stars whose properties are well known, stars that are well-behaved – hand-picked to be very stable, with no signs of activity” says Kate Isaak, Cheops project scientist at ESA.
- This approach enabled the teams at ESA, the mission consortium, and Airbus Spain – the prime contractor – to verify that the satellite is as precise and stable as needed to meet its ambitious goals.
- “The pointing is extremely stable: this means that while the telescope observes a star for hours while the spacecraft moves along its orbit, the image of the star remains always within the same group of pixels in the detector,” explains Carlos Corral van Damme, ESA’s System Principal Engineer for Cheops.
- “Such a great stability is a combination of the excellent performance of the equipment and of the bespoke pointing algorithms, and will be especially important to fulfill the scientific objectives of the mission. The thermal stability of the telescope and the detector has also proven to be even better than required,” adds Carlos.
- The commissioning period demonstrated that Cheops achieves the required photometric precision and, importantly, it also showed that the satellite can be commanded by the ground segment team as needed to perform its science observations.
- “We were thrilled when we realized that all the systems worked as expected or even better than expected,” says Cheops Instrument Scientist Andrea Fortier, who led the commissioning team of the consortium for the University of Bern, Switzerland.
Time for Exoplanets
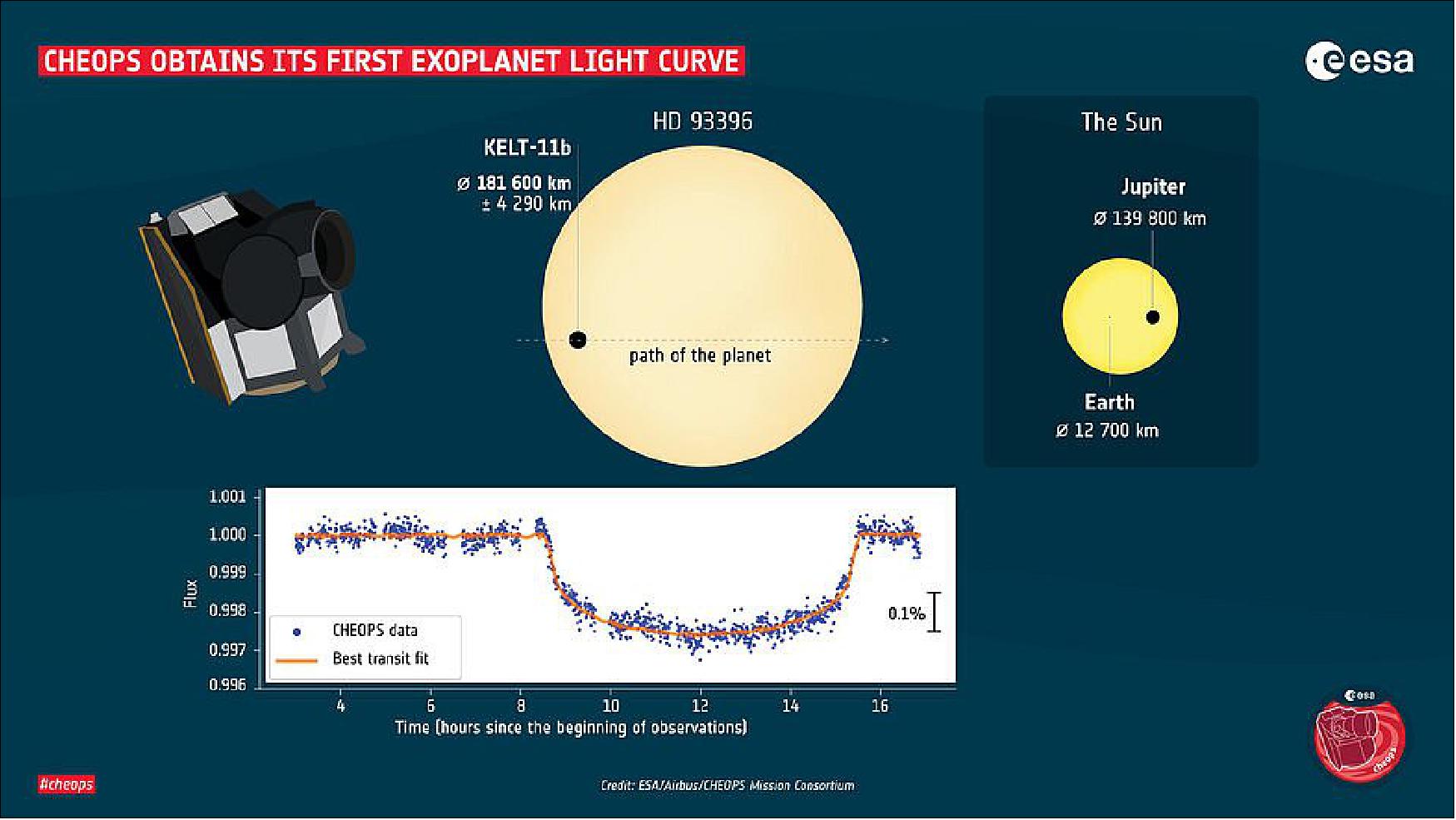
- During the final two weeks of in-orbit commissioning, Cheops observed two exoplanet-hosting stars as the planets ‘transited’ in front of their host star and blocked a fraction of starlight. Observing transits of known exoplanets is what the mission was built for – to measure planet sizes with unprecedented precision and accuracy and to determine their densities by combining these with independent measurements of their masses.
- One of the targets was HD 93396, a subgiant yellow star located 320 light-years away, slightly cooler and three times larger than our Sun. The focus of the observations was KELT-11b, a puffy gaseous planet about 30% larger in size than Jupiter, in an orbit that is much closer to the star than Mercury is to the Sun.
- The measurements made by Cheops are five times more accurate than those from Earth, explains Willy Benz, Principal Investigator of the Cheops mission consortium, and professor of astrophysics at the University of Bern. “That gives us a foretaste for what we can achieve with Cheops over the months and years to come,” he says.
- A formal review of the satellite performance and ground segment operations was held on 25 March, and Cheops passed it with flying colors. With this, ESA handed over responsibility for operating the mission to the consortium led by Willy Benz.
- Fortunately, the commissioning activities were not affected much by the ensuing emergency caused by the coronavirus pandemic, which resulted in social distancing measures and restrictions to movement across Europe to prevent the spread of the virus.
- “The ground segment has been working very smoothly from early on, which enabled us to fully automate most of the operations for commanding the satellite and downlinking the data already in the first few weeks after launch,” explains Carlos. “By the time the crisis emerged in March, with the new rules and regulations that came with it, the automated systems meant that the impact on the mission was minimal.”
- Cheops is currently transitioning towards routine science operations, which are expected to begin before the end of April. Scientists have started observing some of the ‘early science targets’ – a selection of stars and planetary systems chosen to showcase examples of what the mission can achieve: these include a ‘hot super-Earth’ planet known as 55 Cancri e, which is covered in a lava ocean, as well as the ‘warm Neptune’ GJ 436b, which is losing its atmosphere due to the glare from its host star. Another star on the list of upcoming Cheops observations is a white dwarf, the first target from ESA’s Guest Observers Program, which provides scientists from beyond the mission consortium with the opportunity to use the mission and capitalize on its observational capabilities.
• March 26, 2020: Airbus has received confirmation from ESA of a successful end to the In Orbit Commissioning (IOC) of CHEOPS after the IOC review yesterday. This critical phase was performed by Airbus in Spain with the support of the Instrument Team (University of Bern), Mission Operation Center (INTA), Science Operation Center (University of Geneva) and ESA. 32) 33)
- The IOC phase started on 7th January and over the past two and a half months Airbus has conducted the operations to verify the performance of the satellite (platform and instrument), the ground segment and the science package. During this time the main goal was to consolidate the documentation, processes and procedures for use during the operational phase.
- ESA acknowledged the quality of the job done by the Airbus teams and stated there were no issues preventing routine operations from starting and confirmed hand-over of the mission operations from Airbus to INTA and the mission consortium.
- Fernando Varela, Head of Space Systems in Spain, said: "The in-orbit delivery of the CHEOPS satellite is the culmination of the Airbus participation in the program. It is the first European exoplanetary mission and the first ESA mission built by Airbus in Spain. The professionalism of the technical and engineering teams at Airbus was key to this success."
- CHEOPS will be controlled by INTA and the mission consortium (University of Geneva and University of Bern). Nevertheless, Airbus is also ready to assist during the operational phase for the whole mission life.
- CHEOPS marks the first time that Airbus in Spain has been the prime contractor for the whole mission, from satellite development, through launch, to LEOP and IOC. The entire mission development was completed in record time without delays and met the very tight budget. To do this, Airbus managed a team of 24 companies from 11 European countries, seven of them Spanish, confirming Airbus as the driving force behind the space industry in Spain.
- As a reminder, CHEOPS is the first in ESA's FAST TRACK missions program whose main characteristics are low cost and a challenging budget. CHEOPS will characterize exoplanets orbiting nearby stars, observing known planets in the size range between Earth and Neptune and precisely measuring their radii to determine their density and understand what they are made of.
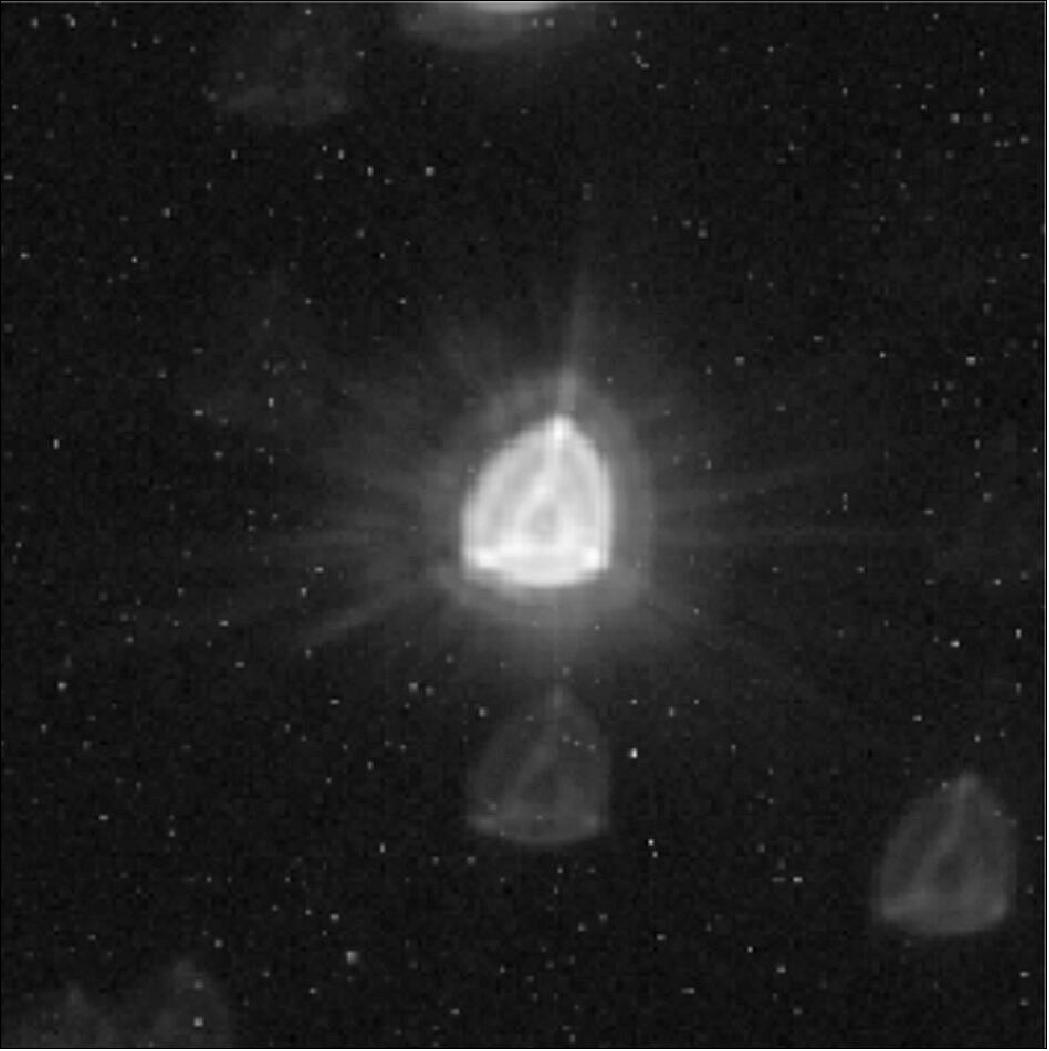
• February 7, 2020: ESA’s exoplanet-observer Cheops acquired the first image of its initial target star, following the successful telescope cover opening on 29 January 2020 (Figure NO TAG#). The intentionally blurry image is a product of the specially designed telescope optics, which are deliberately defocused to maximize the precision of Cheops’ measurements and enable its unprecedented study of exoplanets, or planets in other solar systems. 34)
- The acquisition of this image marks a key milestone in the extensive testing phase of Cheops, the Characterizing ExOPlanet Satellite, before it embarks on its mission to study planets around nearby stars.
- “This is a defining moment for the mission,” says Nicola Rando, ESA project manager for Cheops.
- “To the engineers and scientists across Europe who have worked and continue to work on Cheops, this image represents the culmination of many years of dedication and effort – designing, planning, coordinating and building this new and unique satellite.”
- The image features a stellar field centered on HD 70843, a yellow-white star located around 150 light years away. The team responsible for in-orbit commissioning of the satellite selected this star as the telescope’s first target because of its brightness and its location in the sky, which made it ideal for testing purposes.
- “The first images that were about to appear on the screen were crucial for us to be able to determine if the telescope's optics had survived the rocket launch in good shape,” explains Willy Benz, Principal Investigator of the Cheops mission consortium from the University of Bern, Switzerland.
- When the first images of a field of stars appeared on the screen, it was immediately clear to everyone that we did indeed have a working telescope.
- The Cheops telescope deliberately delivers defocused images of a target star onto the detector – a charge-coupled device, or CCD – in order to distribute the light from each star over many pixels. This makes the measurements of starlight more precise, as they are much less sensitive to small differences in the response of individual pixels in the CCD and to variations in the telescope pointing.
- Having a precise measurement of the stars’ brightness and its variation is of critical importance to the scientists striving to learn as much as possible about the planets known to orbit those stars. A planet transiting in front of a star in Cheops’ view causes the star to dim – a barely detectable dip that can reveal key information about the planet’s properties, most importantly its size.
- “Now that Cheops has observed its first target, we are one step closer to the start of the mission science,” says Kate Isaak, ESA Cheops project scientist.
- “This beautifully blurred image carries the promise of a new, deeper understanding of worlds beyond our Solar System.”
- Over coming weeks, teams at the Mission Operations Center in Torrejón, near Madrid, Spain, together with colleagues from the Universities of Bern and Geneva, Switzerland, will conduct an extensive series of tests on Cheops’ instrument and detector to characterize their in-orbit performance. The same tests will be used to confirm that the scientific data taken by Cheops is processed appropriately.
- Launched on 18 December 2019, Cheops is ESA’s first mission dedicated to the study of exoplanets. Rather than search for new planets, the mission will follow up on hundreds of known planets in orbit around bright stars, with sizes smaller than Saturn’s, that have been discovered by other methods.
- Cheops will observe individual stars as a planet transits in front of them and blocks a fraction of the starlight, using the dip in the light level to measure the planet’s size with exquisite precision. By combining these very accurate and precise sizes with existing measurements of planet masses, it will be possible to determine the bulk densities of large numbers of planets in the size range between Earth and Neptune, which provide vital clues to the planets’ composition and structure. This first-step characterization is a critical step towards understanding how these small extrasolar worlds form and evolve.
- Routine science operations, during which Cheops will observe many hundreds of exoplanet transits, are foreseen to start at the beginning of April.
• January 29, 2020: Six weeks after the launch of Cheops the telescope cover was opened as part of the mission’s in-orbit commissioning. 35)
- Since the launch of Cheops on 18 December 2019, the project has progressed smoothly and successfully through its planned operations and test activities.
- The LEOP (Launch and Early Orbit Phase) was flawlessly completed on 22 December, and the instrument was switched on for the first time on 8 January 2020. By late January, a number of health tests and calibration activities had demonstrated that the instrument was behaving as expected and ready to have its focal plane exposed to light.
- Eventually, one of the mission’s major moments of truth arrived at 07:38 CET this morning, when the telescope cover was opened. This irreversible operation allowed the instrument to see the sky for the first time and was a high point for the project team achieved through years of work.
- “Opening the cover of the telescope baffle is a critical operation for Cheops, enabling the telescope to observe its target stars, and we are extremely pleased that it was performed flawlessly,” says Nicola Rando, ESA Cheops project manager.
- The main goal of Cheops is to observe nearby, bright stars that are already known to host planets. The mission will observe these planets, as they transit in front of their host star and block a fraction of its light, to measure their sizes with unprecedented precision and accuracy.
- The signal of an exoplanet transit can be extremely weak, especially for the smallest planets. Measuring it with the high precision needed to investigate the planet properties represents an observational challenge that can only be met from space, and requires the instrument and satellite to be highly stable.
- One of the key mission elements is a 95 cm long baffle that shields the Cheops telescope from straylight and minimizes light contamination from unwanted sources, such as light reflected by our own planet Earth. The Cheops baffle cover, which can be compared to the lens cap of a camera, covered the front end of the telescope baffle and protected the science instrument from dust and sources of bright light (for example, sunlight) during testing, launch and the first phases of in-orbit commissioning (see Figure 53).
- Opening the baffle cover in orbit was a mission-critical procedure that was closely monitored by members of the in-orbit commissioning team at the Mission Operations Center in Torrejón, near Madrid, Spain.
- The opening mechanism relied on a titanium fastening bolt surrounded by a cylinder made of a shape memory alloy. Heating the cylinder caused it to elongate and break the bolt, which subsequently allowed a spring-loaded hinge to swing the cover open and expose the telescope to the sky. The telescope cover is now permanently locked in the open position by a hook engaged in a ratchet.
- “The opening mechanism is known to be extremely reliable, as it was extensively tested on ground and already flown on previous space missions, but it was still quite a nerve-wracking moment to witness, and we are all very excited now that the telescope has opened its eye to the Universe,” says Francesco Ratti, ESA Cheops instrument engineer.
- Executing this critical procedure is a major step along the path towards Cheops routine observations. Over the coming weeks, the in-orbit commissioning team will test the instrument’s detector and its performance, making sure it behaves as designed and as required to detect exoplanet transits and tackle the mission’s ambitious science questions.
• January 14, 2020: ESA's Cheops orbit trail is shown here as a long streak against a backdrop of stars as it orbits the Earth after its successful launch on 18 December 2019. 36)
- The coordinates of the center of this 2048 x 2048 pixel image are: right ascension 11 h 56 m 58.00 s and declination +27º 30’ 45.0’’ (J2000). The visible trail seen running from bottom to top in the image is due to sunlight reflected by the Cheops spacecraft, which is in a sun-synchronous orbit with an altitude of 700 km and a local time of the ascending node of 6:00 am.
- The image spans only 12 arcminutes across, so Cheops spent a very short time in the field of view – around 400 ms. The estimated r’-band magnitude of CHEOPS in this image is 7.8 ± 0.3 (calculation by M. Sestovic, University of Bern).
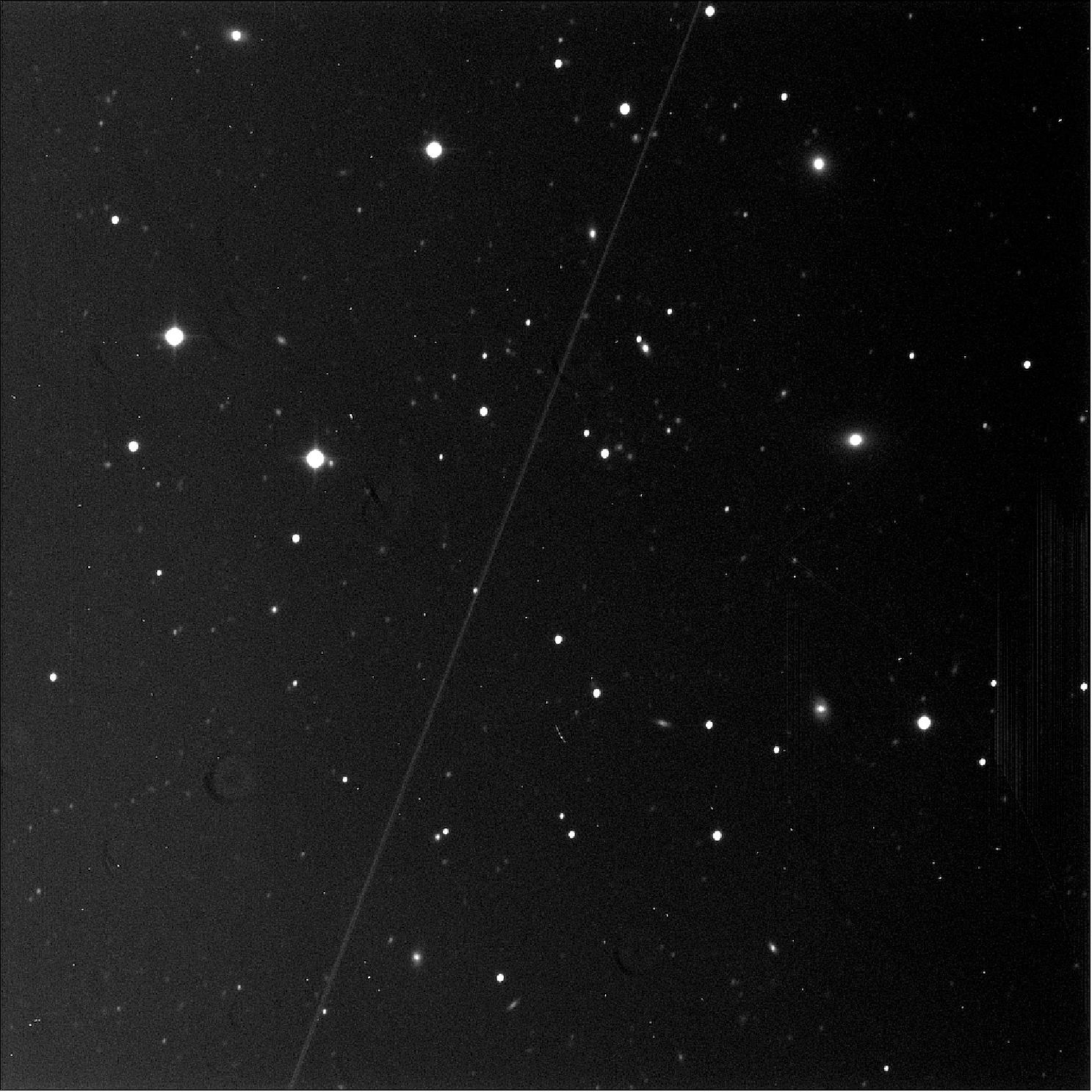
• December 18, 2019: Signals from the spacecraft, received at the mission control center based at INTA in Torrejón de Ardoz near Madrid, Spain, via the Troll ground tracking station at 12:43 CET confirmed that the launch was successful (Ref. NO TAG#.
- “Cheops will take exoplanet science to a whole new level,” says Günther Hasinger, ESA Director of Science. “After the discovery of thousands of planets, the quest can now turn to characterisation, investigating the physical and chemical properties of many exoplanets and really getting to know what they are made of and how they formed. Cheops will also pave the way for our future exoplanet missions, from the international James Webb Telescope to ESA’s very own Plato and Ariel satellites, keeping European science at the forefront of exoplanet research.”
- Cheops will not focus on the search for new planets. Instead, it will follow-up on hundreds of known planets that have been discovered through other methods. The mission will observe these planets exactly as they transit in front of their parent star and block a fraction of its light, to measure their sizes with unprecedented precision and accuracy.
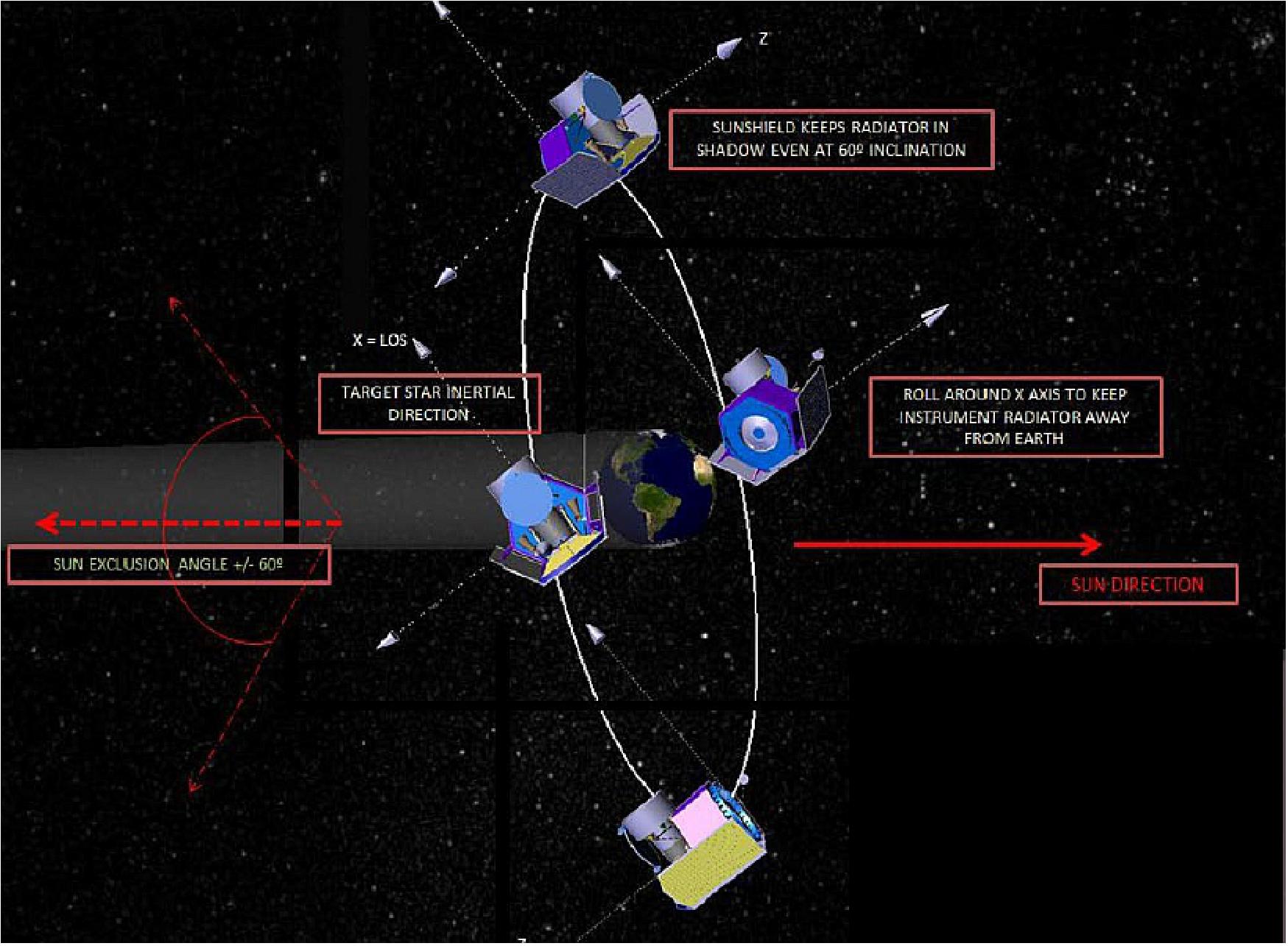
The combination of the accurate and precise sizes determined by CHEOPS with masses determined from other measurements will be used to establish the bulk density of the planets, placing constraints on their composition; these, together with information on the host stars and the planet orbits, will provide key insight into the formation and evolutionary history of planets in the super-Earth to Neptune size range.
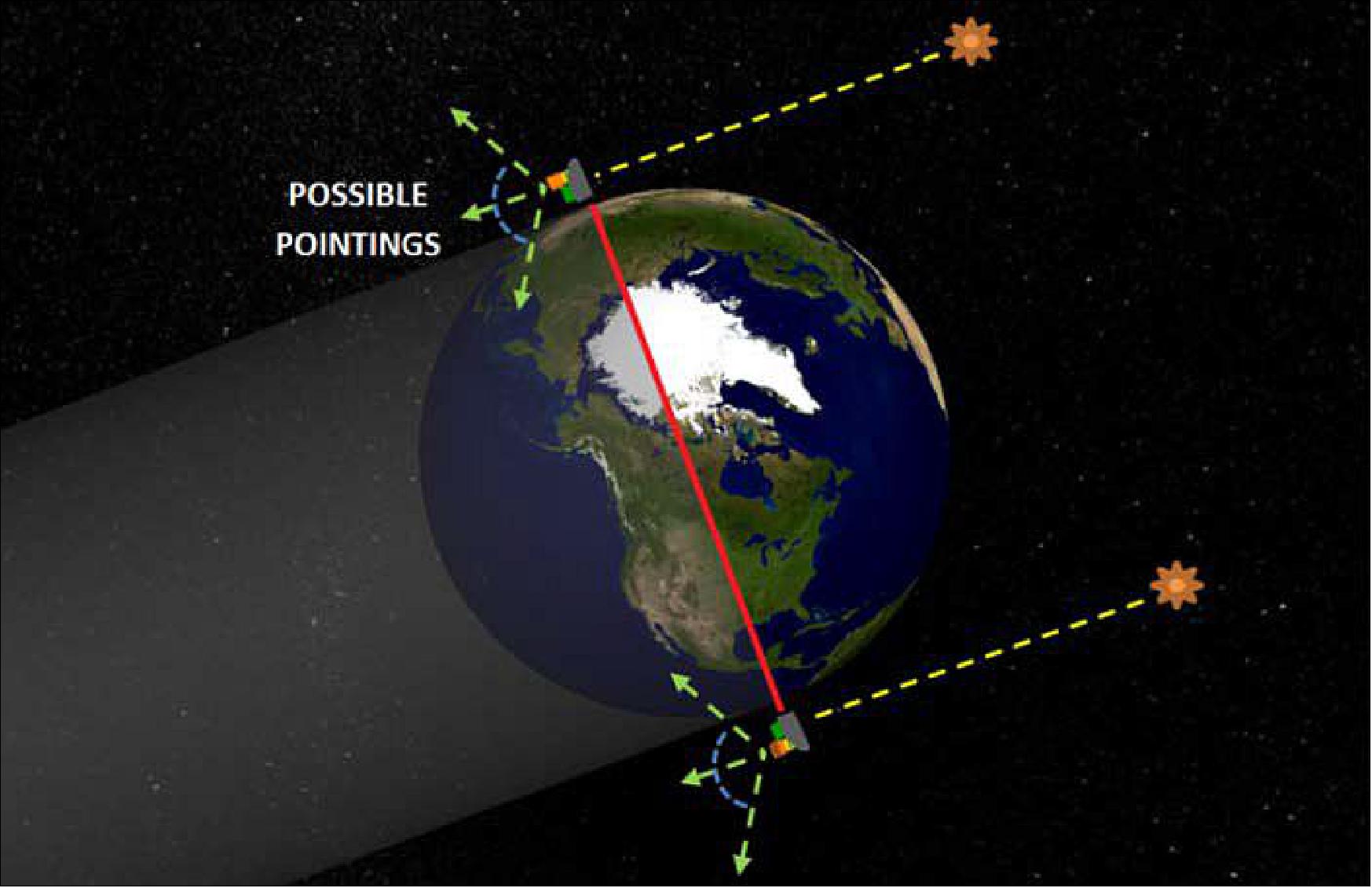
IOC (In Orbit Commissioning)
The CHEOPS commissioning phase starts immediately after the launch and early operations phase (LEOP) that will last for one week. The commissioning phase is expected to last two months and will verify all performance aspects of the mission. The phase will end with the IOCR (In-Orbit Commissioning Review). The LEOP and IOC operations are centralized at the National Institute of Aerospace Technology (INTA) in Torrejon de Ardoz close to Madrid. INTA hosts the mission operations center (MOC) for the CHEOPS mission. The responsibility for LEOP and IOC has been delegated to Airbus DS Spain by ESA (Ref. 6).
The commissioning is divided into four different phases from IOC-A to IOC-D where different requirements are validated. The different phases differ in objectives, involvement of the different stakeholders and in complexity. Starting from instrument functional checkouts in the early phase A and CCD calibration measurements when the aperture cover is still closed to the cover opening and first light end of phase A. Figure NO TAG# gives an idea of how the first light of CHEOPS can look like. It shows a simulated image of the payload where the PSF has been introduced as measured on ground. It shows a view to 55 Cancri, which is located at the very center of the image. The target shown here is a relatively bright star of magnitude 6 imaged using an exposure time of 0.5s.
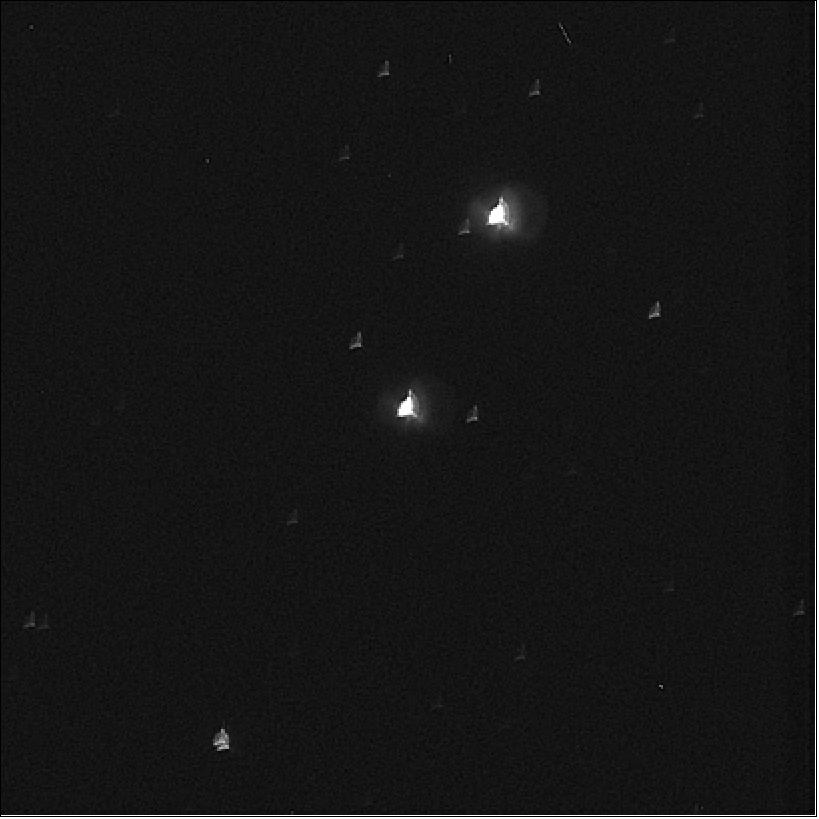
The subsequent phase B will focus on optical verifications of the instrument including distortion, plate scale and PSF measurements; verify pointing stability with and without payload in the loop under different conditions including occultation and different field crowding. In addition, the straylight contribution to the noise budget is measured for different pointing configurations. All the read-out modes of the payload are tested and the SAA model, which is applied for CHEOPS, is validated. In the end of phase B all monitoring and characterization activities that are intended to be performed in a moderate frequency over the mission lifetime are exercised as a reference. Those include PSF, dark current, stray-light, flat field, gain and FWC monitoring as well as a so-called pinning curve measurement. The pinning curve is a measure for radiation damage on the CCD detector. The phase B is therefore very densely packed and gives a comprehensive view on the mission performance. Phase C verifies end-to-end science performance using, among other measurements, reference transits including the full data processing chain.
Phase D demonstrates the nominal mission capabilities including the one-week mission planning and MTL uplink. The phase can also contain low priority activities that are needed to be re-run from the previous phases. In general, phase D verifies the capability of the full space and ground segment to go into the nominal mission phase. At the end of the phase, the IOC is concluded with the IOC review, which marks the point of the handover of the satellite to the mission consortium.
Sensor Complement (Telescope)
The main science goals of the CHEOPS mission will be to study the structure of exoplanets with radii typically ranging from 1 to 6 Earth radii orbiting bright stars. With an accurate knowledge of masses and radii for an unprecedented sample of planets, CHEOPS will set new constraints on the structure and hence on the formation and evolution of planets in this mass range. To reach its goals CHEOPS will measure photometric signals with a precision of 20 ppm in 6 hours of integration time for a 9th magnitude star and a precision of 85 ppm in 3 hours integration time for Neptune-size planets orbiting 12th magnitude star. This corresponds to a signal to noise of 5 for a transit of an Earth-sized planet orbiting a solar-sized star (0.9 solar radii). This precision will be achieved by using a single frame-transfer backside illuminated CCD detector cool down at 233 K and stabilized within ~10 mK (Ref. 7). 37)
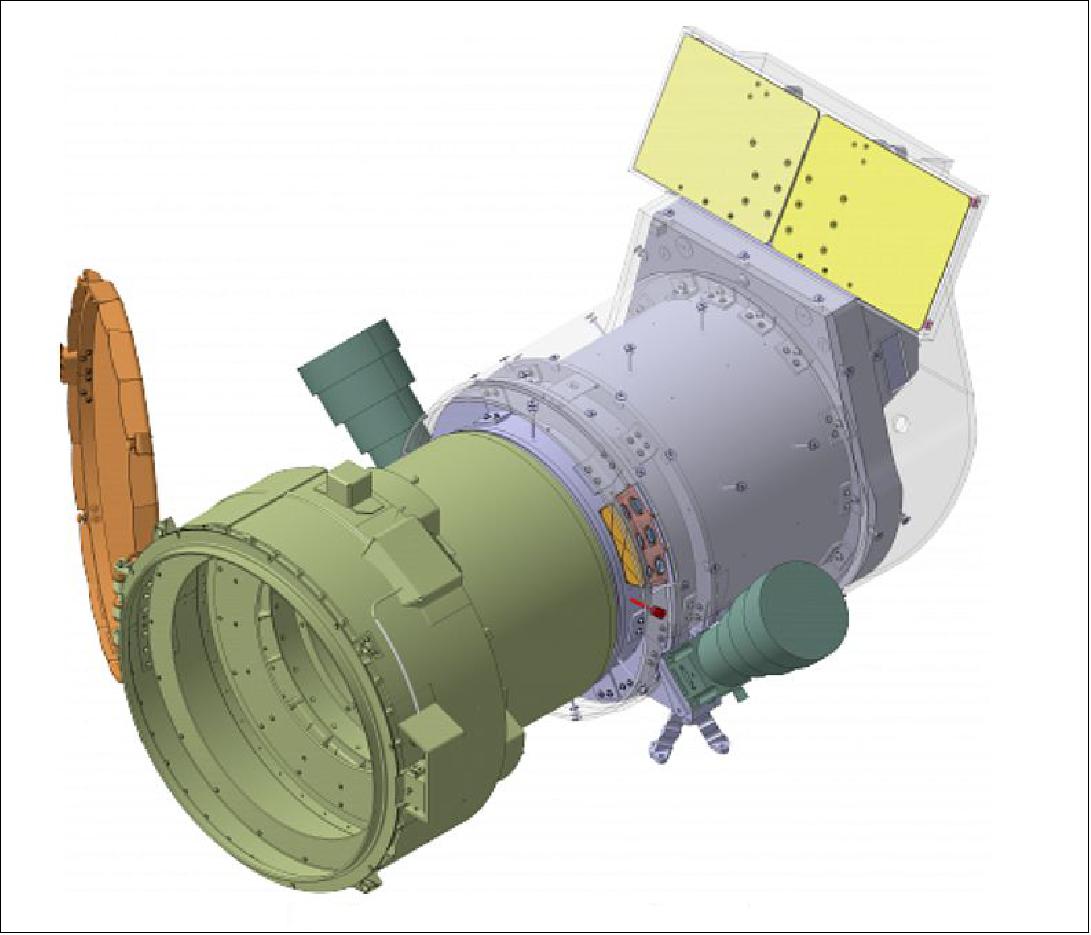
The CHEOPS mission payload consists of a single instrument, a space telescope of 30 cm clear aperture, which has a single frame-transfer back-side illuminated CCD detector in a FPA (Focal Plane Assembly) of a 32 cm diameter on-axis telescope. The telescope feeds a re-imaging optic which supports the stray light suppression concept by providing a position for a field stop and reducing the impact of scattering from the baffling system reaching the detector directly. The optical configuration consists of a Ritchey-Chrétien telescope with additional lenses to provide a de-focussed image of the target star with a PSF (Point Spread Function) covering an area of ~765 cm2. The main design drivers are related to the compactness of the optical system and to the capability to reject the stray light. 38)
The optical design allows incorporation of a central baffle “tower” on which the field stop is mounted. Scattering of reflected Earthshine from the baffle onto the primary mirror is the largest source of stray light in the current baffle design. By increasing the length of the baffle, both scattering from the spider and scattering from the baffle to the secondary mirror are minimized. Combined with an inner and outer baffling system the major stray light requirement (reaching < 1 ph/px/s) can be met. A comparison of the point source transmission functions of CoRoT, the Cassini orbiter narrow angle camera, and our preliminary design is made in Figure NO TAG#.
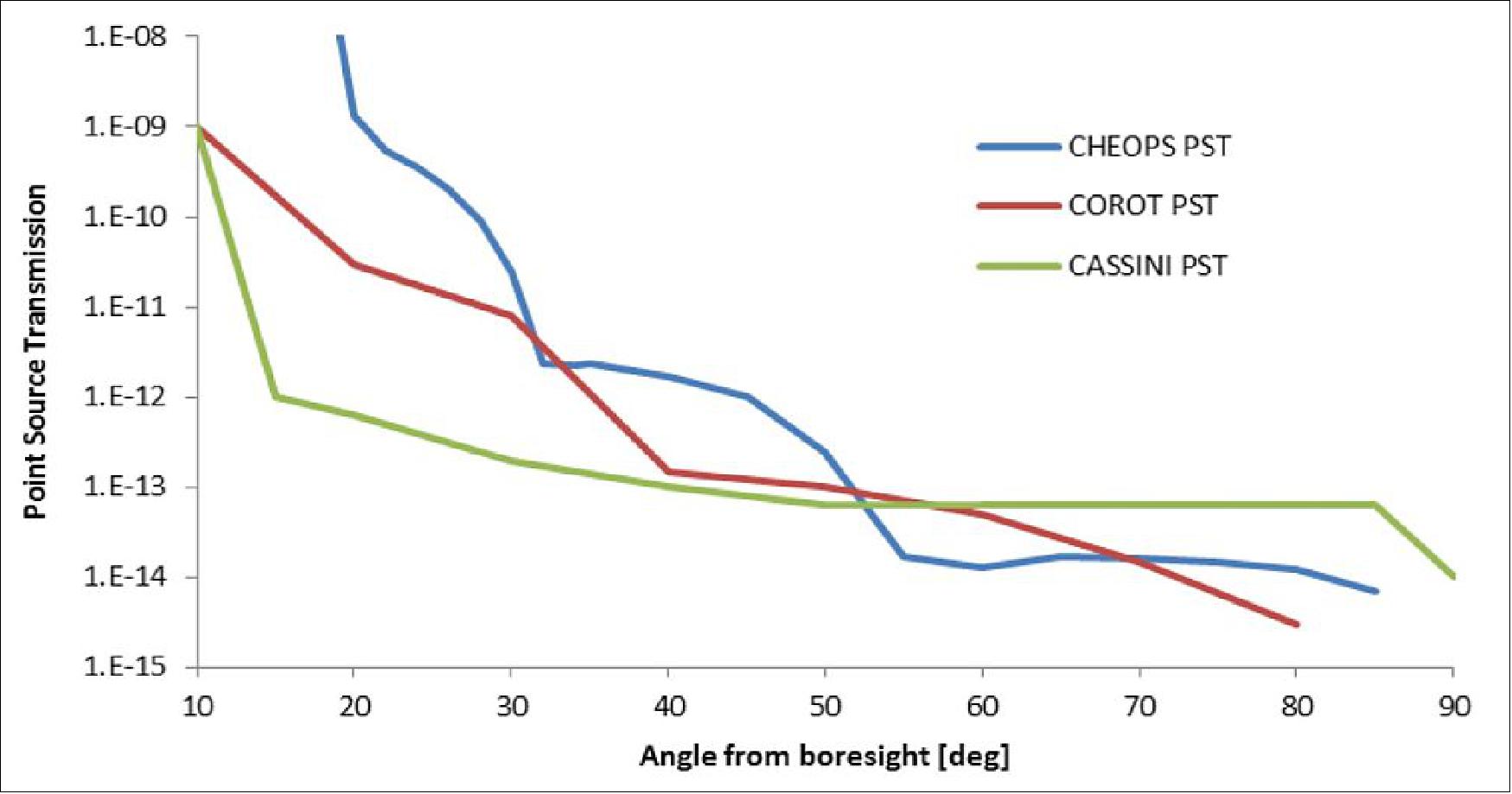
The entrance pupil is located at the primary mirror and has a diameter of 320 mm. The central obstruction has a diameter of 68 mm (equal to the secondary mirror diameter), giving a relative central obstruction diameter of 0.2125. The effective collecting area is 767.93 cm2 (about 8.64% more than the required one corresponding to an unobstructed telescope having a diameter of 300 mm). This redundancy has been maintained to provide for possible lack of throughput efficiencies.
The telescope tube assembly is passively cooled and thermally controlled with on-board heaters. In the baseline design, the distance between the primary mirror and the secondary mirror is 300 mm, which makes it a very compact instrument maximizing launch fairing compatibility. The telescope effective focal length is 1600 mm, giving a telescope focal ratio F/5. The focal plane has a diameter of 11.23 mm corresponding to a FOV (Field of View) of 0.4º. At this location, a focal plane mask of the same size is envisaged for the attenuation of the stray light background.
An estimation of the background contribution due to direct illumination of the focal plane by the sky has been computed. The result is that this background is negligible with respect to the other background sources. As a consequence, no internal baffling for focal plane shielding is required.
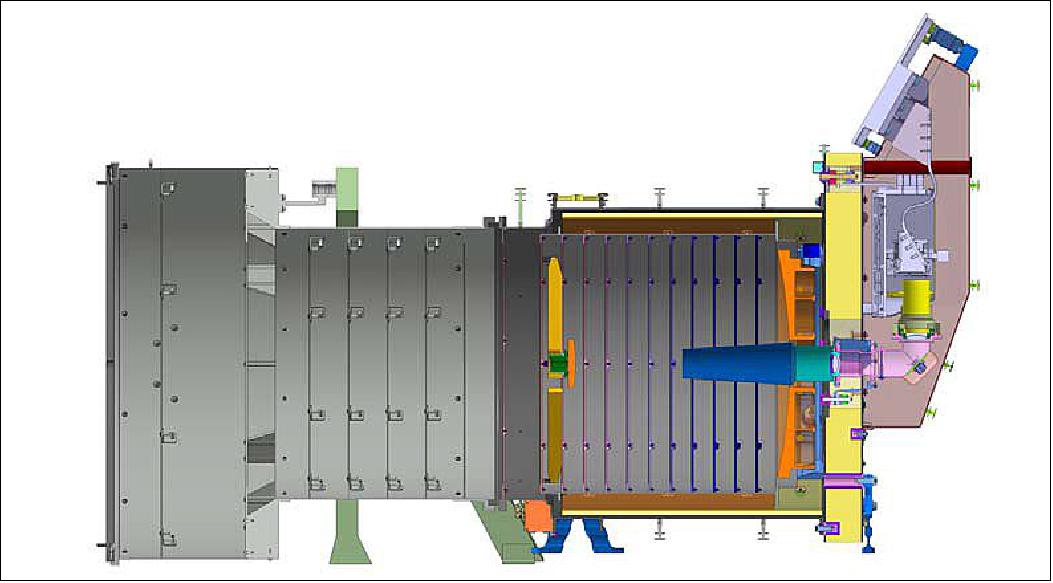
The BEO (Back-End Optics) re-images the telescope focal plane on the detector and provides an intermediate pupil, at which location a mask is placed for the stray light rejection. The BEO is basically composed by three elements: a collimator which forms an intermediate pupil, a flat fold mirror which is inserted to minimize the envelope of the whole optical system, and a camera that re-images the focal plane at the required plate scale. The BEO has been optimized on a FOV having diameters 0.32º. The detector area of interest is 200 x 200 pixels and its location will set inside the optimized FOV. During the optimization, all the wavelengths in the range 400-1100 nm have been associated the same weight, that is, the efficiency of the system has been assumed to be the same at all wavelengths. The current design of the collimator and the camera is based on two spaced achromatic doublets. The goal is to maintain the system as simple as possible, and in compatibility with the performances.
The CIS (CHEOPS Instrument System) is composed of four main units:
1) The BCA (Baffle and Cover Assembly) minimizes the stray-light and includes a protective cover and release mechanism.
2) The OTA (Optical Telescope Assembly) includes the structure carrying the telescope, the BEO (Back End Optics), the FPM (Focal Plane Module), and the radiators. In order to minimize the impact of thermoelastic deformations on the instrument pointing, the optical heads of the platform star trackers will be mounted on the OTA, in proximity of the isostatic mounts of the instrument.
3) The SEM (Sensor Electronics Module)
4) The BEE (Back End Electronics).
Entrance pupil diameter | 320 mm |
Central obstruction diameter | 68 mm |
Working F/# | 8.38 @ 750 nm |
Effective focal length | 2681 mm @ 750 nm |
Telescope field of view diameter | 0.32º |
Spectral range | 400 – 1100 nm |
Pixel size | 13 µm |
Plate scale | 1 arcsec/pixel |
Detector focal plane | 1024 x 1024 pixels |
Detector temperature, detector stability | 233 K, 10 mK |
Instrument total mass | 60 kg |
Instrument total nominal power | 60 W orbit averaged including margin |
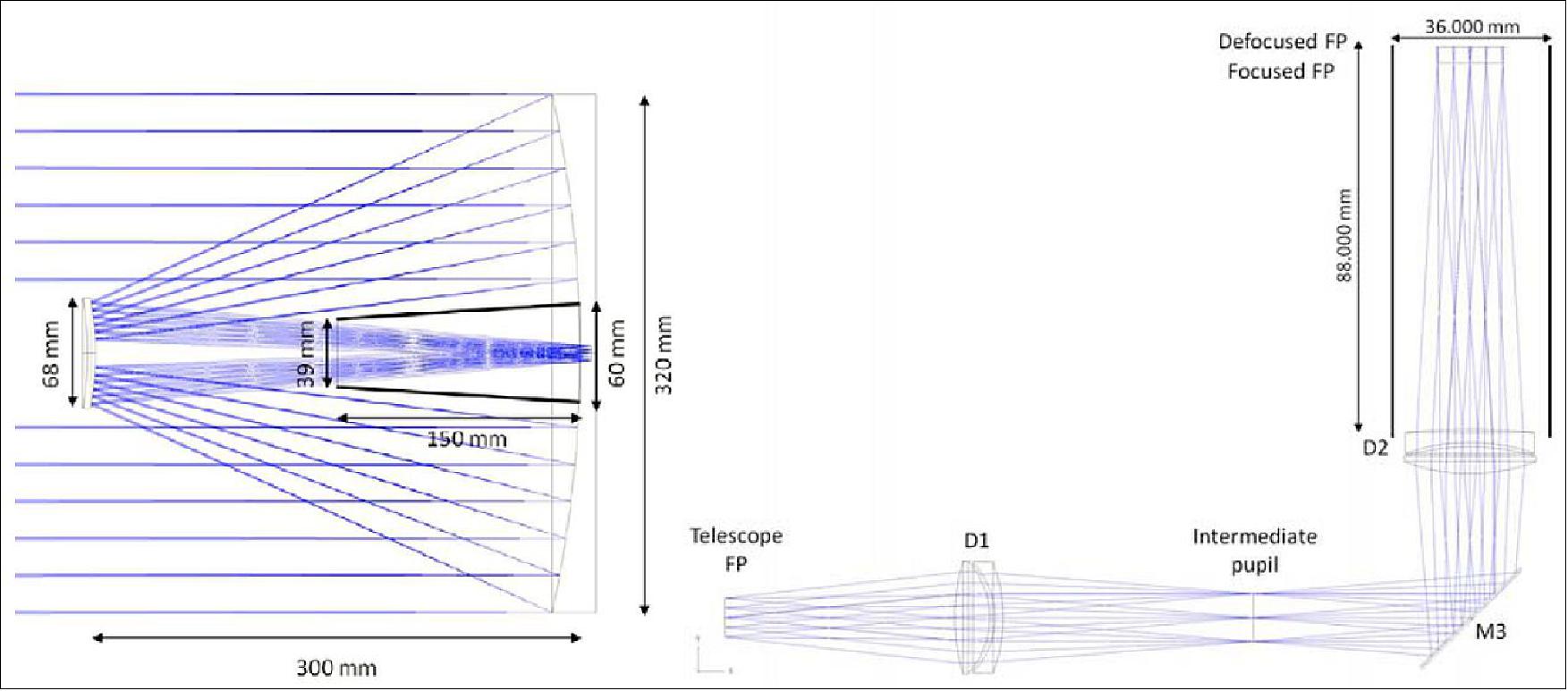
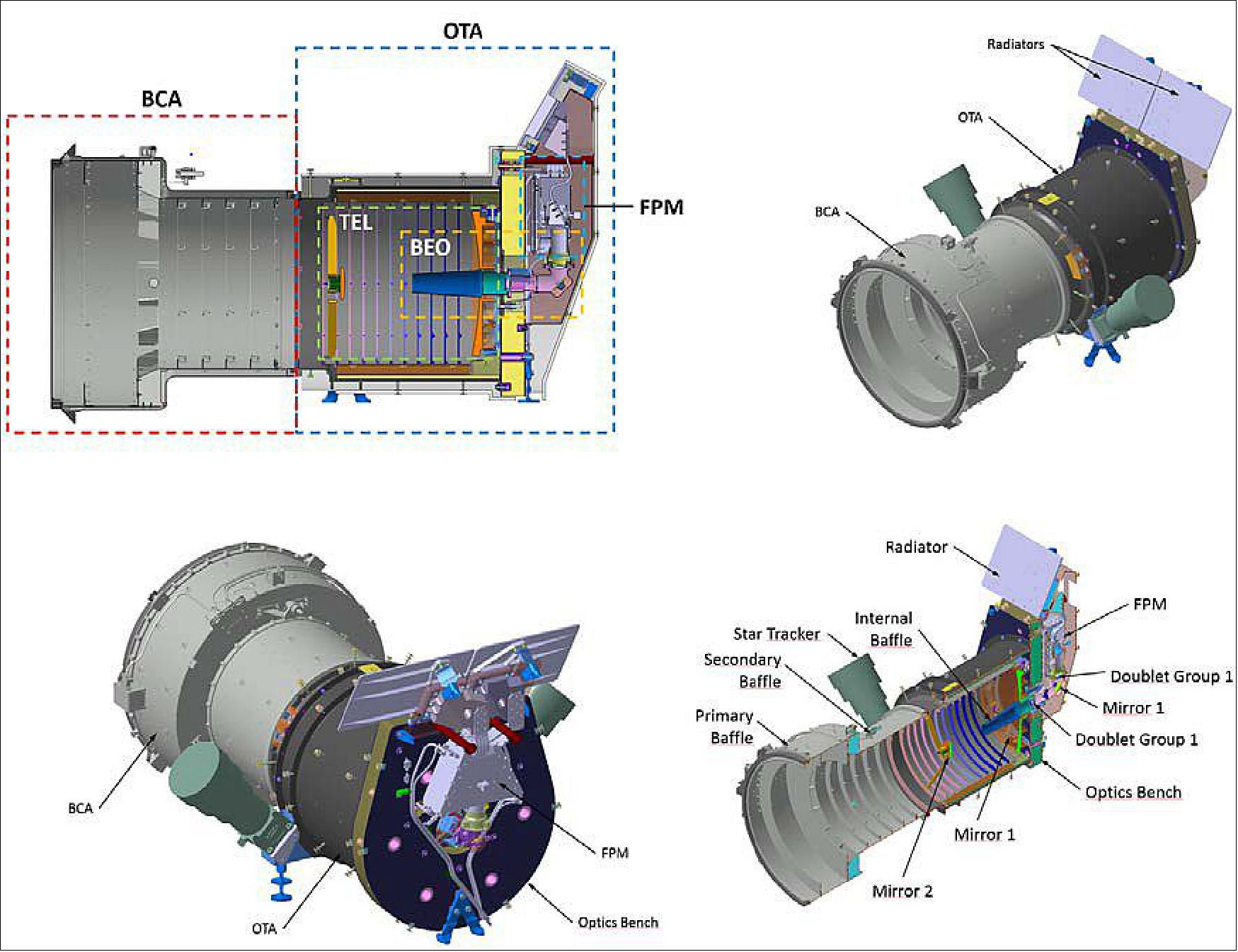
Defocused PSF (Point Spread Function)
The CIS optical design is intended to produce a relatively wide point spread function at the detector plane. The width of the PSF is a trade-off between reducing the noise in the stellar image (pushing to large PSFs) and the increased susceptibility to straylight which a larger stellar image generates.
The theoretical PSF shape is a top-hat cylinder having diameter of about 30 arcsec (i.e., 30 pixels). A figure of merit to evaluate the performance has been derived by considering the optical PSFs, the jitter effect and the flat field performances. The result of the simulations has pointed out that a defocused PSF gives sufficient performance to meet the requirements.
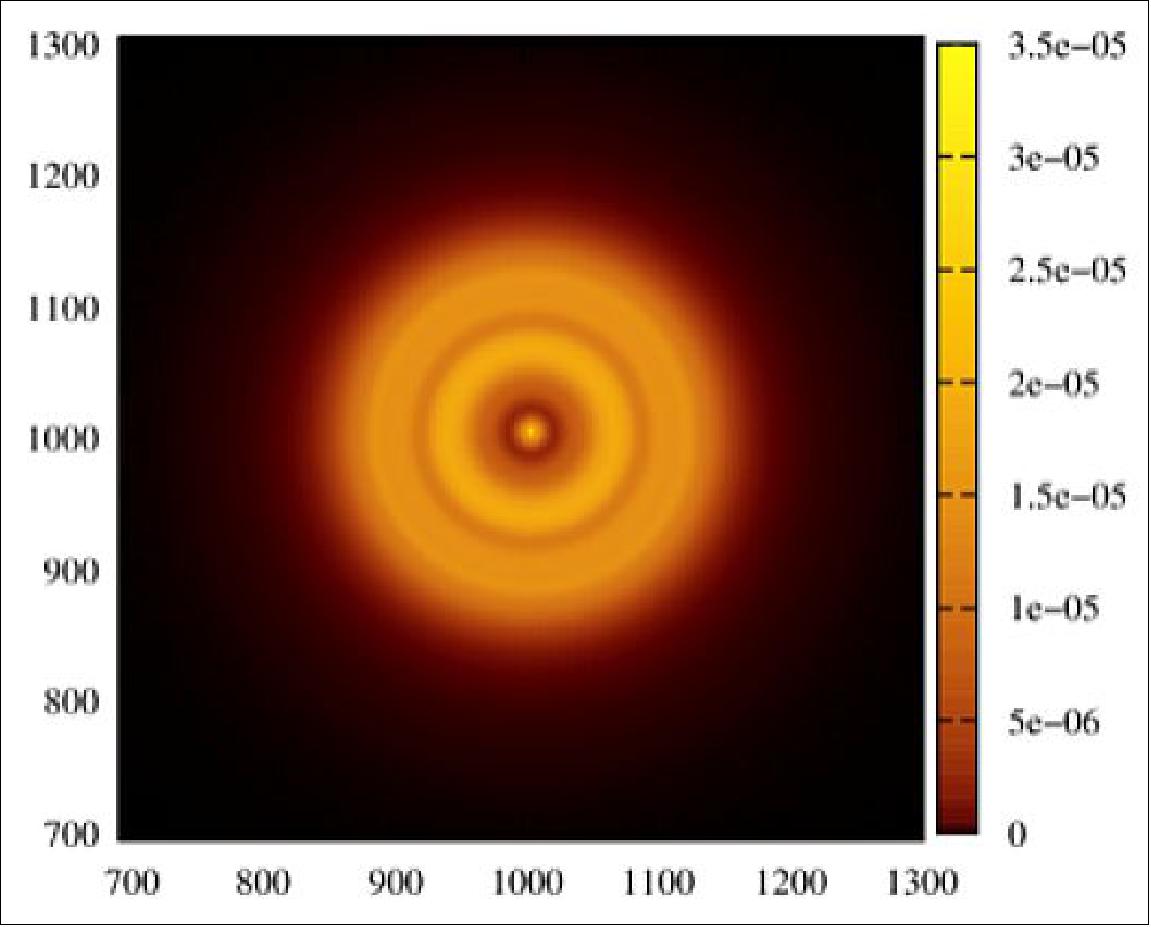
PSFs have been generated at the defocused focal plane (about 3.5 mm from the nominal focal plane) with a flat spectral wavelength between 400 and 1100 nm with a spectral sampling of 50 nm. They have been spatially sampled with a sub-pixel size of 1.3 µm corresponding to 1/10th of the nominal detector pixel size. Moving from the center of the FOV to the edge, anisotropy starts to affect PSFs while at the very edge the PSF starts to be dominated by aberrations. As expected, in the PSF the feature due to the telescope central obstruction and to the Poisson spot can be clearly seen.
BCA (Baffle and Cover Assembly)
The BCA is the key to the stray light mitigation strategy of the CHEOPS instrument. The external baffle goal is to limit the amount of straylight issued from sources located more than 35º from the optical axis. The baffle design as well as the cover and actuator are of CoRoT heritage. The purpose of the cover is to provide a light tight lid as well as contamination control for the telescope integration prior to launch. The cover release mechanism is based on a spring-loaded hinge and a launch lock mechanism. The launch lock is based on a Frangibolt actuator design. This solution provides reliability and also avoids contamination issues during launch and early orbital phase.
FPM (Focal Plane Module) and SEM (Sensor Electronics Module)
The detector selected is an e2v CCD47-20 (13-µm pixel 1 k x 1 k, AIMO). The CCD will be nominally operated at 233 K. The FM (Flight Model) CCD will be characterized prior to installation in the PFM (Proto Flight Model) instrument.
There are two electrical modules for interfacing, controlling and reading-out the CCD detector, the FPM located on the optical bench and the SEM located inside the platform. The FPM (Focal Plane Module) contains the FPA (Focal Plane Assembly) where the CCD is located and the FEE (Front End Electronics) both with two separate interfaces to the radiator for cooling down the units. The SEM as a physically separated module and electrical harness to the FPM/FEE contains a SCU (Sensor Control Unit) and a PCU (Power Conditioning Unit) interfacing the DPU (Data Processing Unit) and the PSU (Power Supply Unit). Both, the DPU and PSU are integrated in the BEE (Back End Electronics) located inside the platform. The electrical subsystem architecture is given Figure NO TAG#.
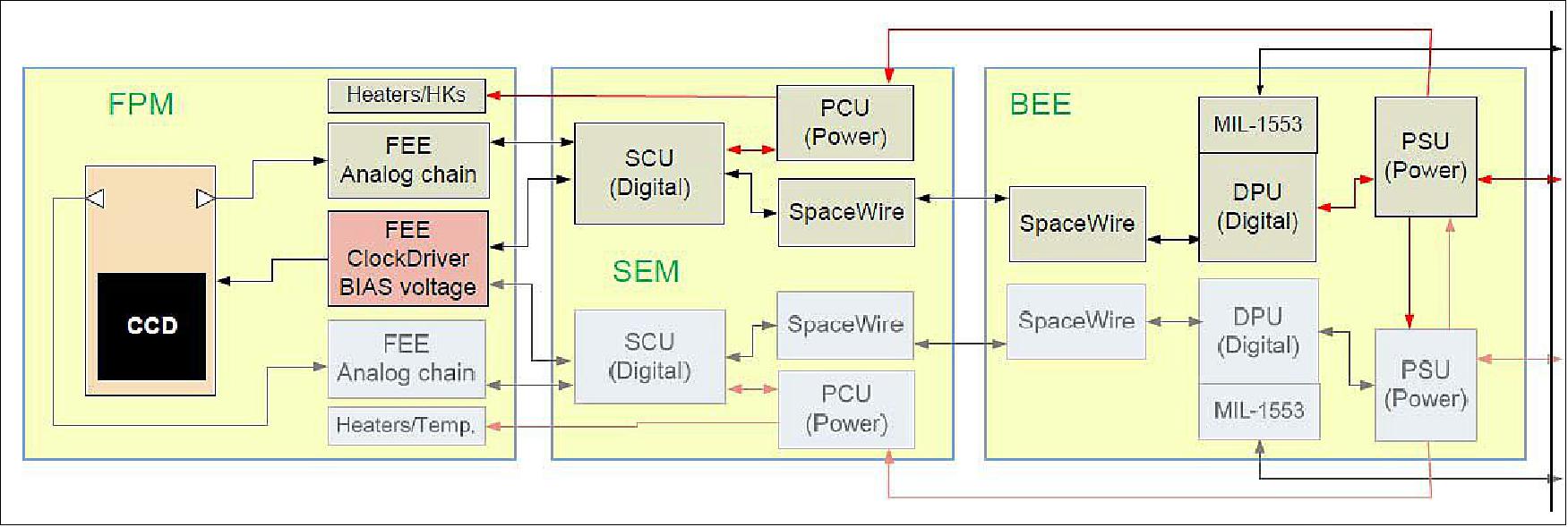
The FPM-SEM architecture is mainly driven by the thermal design having 3 different categories reflecting the requirements of thermal control.
1) Focal Plane Assembly (FPA) with CCD and proximity electronics operating at lower than 233K nominally stabilized by heating against a dedicated radiator
2) Front End Electronics (FEE) with analog and CCD low level control electronics operating between 253 – 283 K stabilized by heating against a dedicated radiator
3) SCU & PCU (Sensor Controller Unit and Power Conditioning Unit), including the FPGA – based digital electronics for data handling and controlling the CCD detector by different readout modes at standard temperatures without stabilization needs.
Due to the sensitivity of signals and clocks against cross talk and disturbances the analogue electronics according 1 and 2 is organized in close vicinity.
The gain stability of the analog electronics over several hours is one of the most important design drivers for selecting the EEE (Electrical, Electronic, and Electromechanical) components and designing the electronics in detail. Especially the BIAS and clock voltages have to be very stable because of the significant sensitivity of the CCD against voltage drifts. The challenge is to use available space qualified components which fulfil required thermal drift characteristics of gain and offset parameters but have adequate electrical performance fulfilling the low read-out and quantization noise requirements. Even if a temperature stabilization of dedicated electronics areas is foreseen a favored very low stability (or very low systematic error) of 10ppm over hours requires extended calibration of the electronics e.g. measurement the CCD BIAS voltage drift vs temperature.
The current design philosophy is to maximize fault tolerance of the digital and analog subsystems by avoiding SPF (Single Points of Failure). This has led to a cold redundant design for SEM and BEE. The FPM also is cold redundant to a large degree, with the exception of the CCD, the CCD clock driver and BIAS voltage supply.
The channel is selected by powering-on either the main or redundant electronics chain. The SEM main/redundant channels and BEE main/redundant channels are powered separately, so that an operation of main/main or redundant/redundant is possible if one chain fails. A cross-strapping at the SpaceWire links and secondary power voltages are not foreseen. The data are acquired by the BEE/DPU either from the main or redundant SpaceWire link.
BEE (Back End Electronics)
The BEE is composed of the DPU (Data Processing Unit) and the PSU (Power Supply Unit). The main task of the DPU besides the communication with the camera read-out electronics is the compression and packaging of telemetry data. The DPU will also compute centroid the stellar images and transmit it to the spacecraft AOCS thereby allowing more accurate control of the spacecraft pointing (requirement of <8 arcsec).
The RPW (Radio Plasma Wave) DPU hardware is based on the GR712, which contains two LEON3 processors and provides space wire and MIL-1553 interfaces. The DPU carries a mass memory to allow for 3 days operation without ground contact. 3D-Plus provides a FLASH memory in the configuration of 4 Gbit times eight bit. For effective operation of the processor four components are used to provide 32 bit access and EDAC. The present configuration foresees the flash memory for storage of telemetry data. In addition the onboard backup of the application software shall be stored in this area. To increase the reliability, in particular for the backup of the application software, it is recommended to keep more than one copies, located at different pages. Four standard chips are combined to a stack and packed into a common package. The total height of the stack is ~12 mm. Due to this configuration, it is unlikely that one high energetic particle would hit a similar address range on all pages at the same time. The four chips are accessed by individual chip enable, read and write enable signals. The command latch enable and the address latch enable is common for all four chips. The total size of the memory to be used for data will be 32 bit times 4 Gbit (128 Gbit = 16 GByte). It is recommended to organize the mass memory as a ring buffer. This would use all memory cells with the same frequency. In this case approximately ~127 Gbit are available. Since the average telemetry is 1.2 Gbit/day, the same memory cell will be used approximately three times per year. Therefore, the limited life time of the component (~100.000 write cycles) is negligible.
The PSU provides dedicated DC-DC converters for the DPU and the SEM & FPM with high accurate secondary voltages and switches to control up to four instrument operational heaters. The spacecraft interface includes an EMC filter, solid state switches for ON/OFF control and the status monitoring. Presently it is foreseen to have a temperature sensor connected to the analog telemetry provided by the spacecraft.
Ground Segment (GS)
CHEOPS nominal ground station is located at Torrejon (near Madrid, Spain) and the backup station is the Vilspa ESA Station-1. The use of Kiruna or Svalbard stations is a possible option to increase LEOP coverage.
The operational concept of the mission control during the different phases has been optimized in order to have a high autonomy in the space segment so that the ground operations are minimized in nominal behavior.
The CHEOPS mission control comprises two main operational parties:
• MOC (Mission Operations Center): The MOC is a set of facilities used to control and operate the space segment, including the control center, the mission planning and the ground station. It is located at Torrejón de Ardoz (Spain).
• SOC (Science Operations Center): The SOC is a facility used to define the scientific targets, archive the obtained science data. It is located at the University of Geneva (Switzerland).
The spacecraft communication with the ground segment is performed through S-band chain, both for commands and telemetry (science & HK TM). The MOC commands and controls the satellite and analyzes the HK telemetry. The operation starts at the SOC, where the scientists define the payload mission planning with the targets to be observed during an observation period . This planning is added to the platform commands into a complete mission planning that is given to the MOC for a final check. Through the MCS (Mission Control System) and the GS, the MTL (Mission TimeLine) is uploaded to the CHEOPS S/C and the S/C will execute the commands included in the MTL so that the targets are observed during the desired periods of time. Once the data is archived on-board, it is downloaded to the GS during a visibility pass, through the S-band communication subsystem. The data is archived in the MOC and then, transferred to SOC for cataloguing and processing.
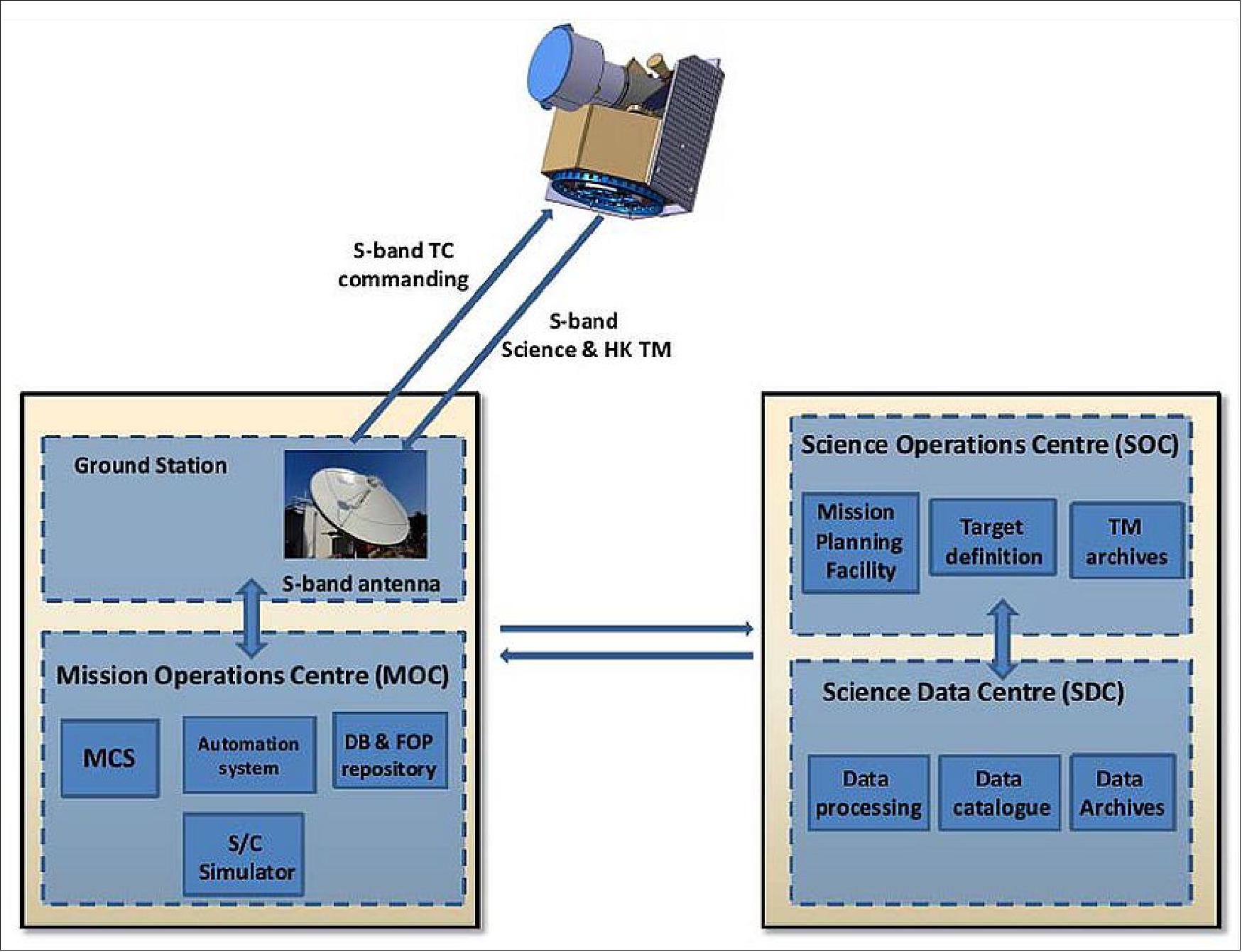
Development status:
• December 13, 2019: The fairing of the Soyuz launcher that will lift ESA’s Cheops mission into space, along with the primary passenger, the Italian space agency’s Cosmo-SkyMed Second Generation satellite, and three CubeSats: ESA’s OPS-SAT and the French space agency’s CNES's EYE-SAT and ANGELS satellites. Launch is scheduled for 17 December from Europe’s Spaceport in Kourou, French Guiana. 39)

• December 2, 2018: At Europe’s Spaceport in Kourou, French Guiana, ESA’s Characterizing Exoplanet Satellite, Cheops, is being encapsulated into the flight adapter of the Soyuz-Fregat rocket that will lift it into space on 17 December. 40) 41)
- It’s an intense period at the Spaceport, where engineers from ESA, Airbus and CNES have been preparing for launch since the satellite arrival in mid-October.

• October 18, 2019: The Cheops satellite arrived in Kourou, French Guiana, on 16 October for launch preparations at Europe's Spaceport. 42)

• October 10, 2019: Nobel laureate Michel Mayor during his visit to ESA's European Astronomy Space Center (ESAC) near Madrid, Spain, where he gave a seminar on the subject 'Exoplanets: past, present and future' on 10 October. 43)

- An emeritus professor at the University of Geneva, Mayor was awarded the 2019 Nobel Prize in Physics together with Didier Queloz for the first discovery of an exoplanet orbiting a solar-type star. The two Swiss astrophysicists shared the prize with James Peebles, honored for the theoretical framework of cosmology used to investigate the Universe on its largest scales.
• October 8, 2019: ESA congratulates 2019 Nobel Prize in Physics laureates Michel Mayor and Didier Queloz, who have been awarded the prestigious prize for the first discovery of an exoplanet orbiting a solar-type star, and James Peebles, honored for the theoretical framework of cosmology used to investigate the Universe on its largest scales. 44) 45)

- The two halves of this year’s award recognize groundbreaking contributions to our understanding of how the Universe formed and evolved, as well as the role of Earth – and of us, as humans – in the overall cosmic picture. Cosmology and exoplanets are among the key themes investigated by ESA’s space science missions.
- “We are delighted with the Nobel committee’s recognition of these two major milestones in astronomy,” says Günther Hasinger, ESA Director of Science.
- “From the seeds of cosmic structure, generated almost fourteen billion years ago, to the building blocks of planets and even life, the work of Peebles, Mayor and Queloz tackles some of the most profound questions that humanity has ever pondered: where do we come from? Where are we going? Is there life elsewhere in the Universe?
- “These fascinating questions inspire and underpin our daily scientific work at ESA, from cosmology missions like Planck and Euclid to our future fleet of exoplanet satellites, including the upcoming Cheops mission that will soon characterize many alien worlds.”
Exoplanet pioneers
- Michel Mayor is an emeritus professor at the University of Geneva, and Didier Queloz is a professor at the University of Geneva and the University of Cambridge.
- In the early 1990s, when Queloz was Mayor’s PhD student, they were using the Haute-Provence Observatory in southern France to search for subtle changes in the light coming from nearby stars in a quest for signatures of planets beyond the Solar System. These pioneering observations eventually revealed 51 Pegasi b, the first exoplanet found around a star like our Sun.
- Announced just 24 years ago this month during an astronomy conference in Florence, the discovery of Mayor and Queloz has forever changed our perspective on the cosmos. Revealing a planet that was unlike anything seen in our Solar System, the finding shook our theoretical understanding of planetary formation and inaugurated a flurry of investigations in the burgeoning field of exoplanets.
- In the past quarter of a century, astronomers have been exploiting observatories on ground and in space and discovered more than 4000 exoplanets. The next endeavour in this exciting subject is ESA’s Characterizing Exoplanet Satellite, Cheops, which is currently undergoing final preparations ahead of its launch scheduled for mid December.
- Once in space, Cheops will perform detailed observations of bright stars known to host planets, particularly in the Earth-to-Neptune size range, enabling a first step towards characterizing the nature of these distant, exotic worlds. Didier Queloz is the Chair of the Cheops Science Team, which comprises experts from eleven ESA member states.
- In the next decade, ESA is planning two more missions dedicated to the study of exoplanets – Plato, the PLAnetary Transits and Oscillations of stars mission, and Ariel, the Atmospheric Remote-sensing Infrared Exoplanet Large-survey mission – keeping European science at the forefront of exoplanet research.
From planets to the cosmos
- James Peebles, Albert Einstein Professor of Science Emeritus at Princeton University, started developing theoretical models that lay the foundation of our understanding of the Universe’s formation and evolution in the 1960s, greatly contributing to the impressive growth of modern cosmology.
- The theoretical framework put forward by Peebles describes the evolution of the large-scale structure we see in today’s Universe based on the seeds that are observed in the Cosmic Microwave Background (CMB), the most ancient light in cosmic history, released when the Universe was only 380 000 years old. ESA’s Planck mission, operating between 2009 and 2013, has obtained the most precise picture of the CMB, enabling investigations that have confirmed this view of the Universe to unprecedented accuracy.
- But not all mysteries are solved. In the 1980s, Peebles’ intuitions were also key to recognize two major missing ingredients in the leading cosmological model – dark matter and dark energy. Another ESA mission, Euclid, currently in preparation and due to launch in 2022, will observe billions of galaxies to probe the past ten billion years of the Universe’s expansion and shed light on these two mysterious cosmic components.
• July 29, 2019: The Characterizing Exoplanet Satellite, Cheops, has successfully passed the final analysis review for its launch on a Soyuz rocket from Europe’s Spaceport in Kourou, French Guiana. 46)
- All technical evaluations performed by Arianespace on the mission’s key aspects, including the launch trajectory and payload separation, have shown positive results.
- “We are thrilled to have passed this important milestone and received the green light from Arianespace,” says Nicola Rando, ESA Cheops project manager.
- Arianespace’s launch manifest for the coming months is currently under discussion, with the exact date for Cheops shipment to the Spaceport, and its launch date, to be confirmed at a later stage. The mission is foreseen to launch in the last quarter of 2019.
- Cheops is a follow-up mission for the study of exoplanets. It will observe bright stars that are already known to host planets, measuring minuscule brightness changes due to the planet’s transit across the star’s disc.
- The mission will target stars hosting planets in the Earth-to-Neptune size range, yielding precise measurements of the planet sizes. This, together with known information about the planet masses, will allow scientists to determine their bulk density, enabling a first-step characterization of these extrasolar worlds. A planet’s density provides vital clues about its composition and structure, indicating for example if it is predominantly rocky or gassy, or perhaps harbors significant oceans.
- “We are very much looking forward to the beginning of our scientific adventure, and to follow-up on some of the known exoplanets in more detail,” says Kate Isaak, ESA Cheops project scientist.
• March 29, 2019: Airbus Defence and Space has completed construction of CHEOPS (Characterizing Exoplanet Satellite). The European Space Agency (ESA) recently gave the green light at the Qualification and Acceptance Review. Representatives from ESA, CDTI (Centro para el Desarrollo Tecnológico Industrial) and Airbus explained the mission, the satellite, and the Spanish participation in the CHEOPS program at the media event today at Airbus’ Madrid-Barajas site. 47) 48)
- Günther Hasinger, Director of Science at ESA; Javier Ponce, Director General of CDTI; and Rafael Rodrigo, Secretary General of Scientific Policy at the Ministry of Science, spoke at the event. They were welcomed by Fernando Varela, Head of Space Systems of Airbus in Spain.
- Günther Hasinger from ESA outlined the importance of this satellite: “We are thrilled to be launching CHEOPS later this year. With its ultra-high precision observations of stars that we already know to host exoplanets, the mission will enable a first-step characterization of the composition and nature of planets beyond our Solar System. CHEOPS is ESA’s first satellite dedicated to exoplanets, paving the way to two more missions in the coming decade and consolidating European leadership in exoplanet science.”
- According to CDTI, the importance of Cheops goes beyond discovering new exoplanets. It is the first complete ESA mission to be led by Spain. The leadership demonstrated by Spain in Cheops will have positive effects on future space missions. Its launch comes at a key moment for the country as Seville will host the next ESA Ministerial Council at the end of 2019, which will, without doubt help to consolidate this leadership in space missions.
- “Airbus has outstanding expertise in science missions in space and for CHEOPS we are the prime contractor of the first ESA satellite won by Spain in open competition,” said Fernando Varela, Head of Space Systems of Airbus in Spain. “Now that we can see the launch on the horizon we congratulate all the teams involved for their excellent work. This project consolidates the role of Airbus in Spain as the main satellite manufacturer, and reliable prime contractor of the Spanish space industry.”
- CHEOPS is the first of ESA’s small missions, designed to be ready to fly within five years, and using proven technologies, to pave the way for bigger and more ambitious missions. It will perform an ambitious scientific mission focused on defining the properties of planets orbiting nearby stars. The instrument that will study these exoplanets is a Ritchey-Chrétien telescope supplied by the University of Bern, in Switzerland, which is integrated on Airbus’ highly flexible and compact AstroBus-S platform.
- The Airbus AstroBus platform has been used successfully on other missions including: Spot-6 and -7, KazEOSat-1, PeruSat-1, Sentinel-5 Precursor and MetOp Second Generation weather satellites. CHEOPS has a mass of about 300 kg and is roughly a 1.5 m cube.
- To build the satellite a group of 24 companies from 11 European countries was selected, seven of these companies are Spanish. The challenges were enormous especially as the flight model had to be built and tested in only two years.
- Airbus will use the time before launch to recheck the spacecraft, upload the latest version of software, carry out simulations for the Launch Early Operation Phase maneuvers and refine the procedures for In Orbit Commissioning. Airbus involvement goes beyond the LEOP and IOC phases and official delivery of the satellite, by providing support for control of the satellite from the ground and maintenance during the operational phase. The Operations and Support Center that will coordinate the main ground segment operations will be located at INTA (National Institute of Aerospace Technologies) near Madrid.
- The CHEOPS mission will analyze, for at least three and a half years (design lifetime), the exoplanets’ transit when passing in front of their stars. It will operate in a sun-synchronous orbit, at an altitude of 700 km. This will provide stable temperatures and constant illumination of its solar panels, minimizing the possibility of stray light reflections on the telescope. The satellite is on schedule for launch between 15 October and 14 November 2019, on board a Soyuz launcher from the European Space Port in Kourou.
- CHEOPS is a precursor mission. Data from the spacecraft will be used to generate a list of the most promising exoplanets in terms of being able to sustain life as we know it. Plato and Ariel are the ESA missions that will go deeper in the study of exoplanets beyond the next decade.
• March 11, 2019: After completing spacecraft testing, the satellite has passed a very important review that determined it is ready to fly. Cheops will be stored in Madrid for a few months before being shipped to the launch site in Kourou, French Guiana; launch is scheduled in the time slot between 15 October and 14 November. 49)
- The baffle cover pictured in Figure 53 is designed to protect the satellite’s scientific instrument – a powerful camera, or photometer – during assembly and launch. Once in space, the cover will open, allowing light from stars to enter the telescope.
- Cheops will make observations of exoplanet-hosting stars to measure small changes in their brightness due to the transit of a planet across the star's disc, targeting in particular stars hosting planets in the Earth-to-Neptune size range. The information will enable precise measurements of the sizes of the orbiting planets to be made: combined with measurements of the planet masses, this will provide an estimate of their mean density – a first step to characterizing planets outside our Solar System.
- Cheops paves the way for the next generation of ESA’s exoplanet satellites, with two further missions – Plato and Ariel – planned for the next decade to tackle different aspects of the evolving field of exoplanet science.
- #16: CHEOPS is ready for flight

• October 17, 2018: For the CHEOPS mission, September was a busy month of acoustic noise testing and Electromagnetic Compatibility (EMC) testing at ESA/ESTEC in the Netherlands. The successful tests have shown that the satellite can withstand the high sound pressures of launch and is compatible with its electromagnetic environment at launch and in orbit. 50)
- CHEOPS journal #13 reported on vibration testing that took place in Switzerland to ensure that mechanical vibrations do not damage the satellite at launch. Whereas mechanical vibrations during launch are transmitted to the spacecraft through an adapter fixed to the launcher, acoustic energy will reach the spacecraft through the air from all sides.
- Acoustic noise testing was carried out in the test chamber LEAF (Large European Acoustic Facility) at ESA/ESTEC, which is equipped with extremely powerful noise-generating horns. The 0.5 m thick, reinforced-concrete walls of the chamber are designed to reflect acoustic waves and fill the entire room with reverberant sound, creating a diffuse sound field in the vicinity of the satellite that recreates the conditions within the rocket's payload fairing at launch.
- The satellite was placed in an elevated position and surrounded by microphones that monitored sound pressure levels during the test. The response of the satellite to the sound field was recorded by fitting accelerometers to the spacecraft structure and measuring the mechanical vibrations induced by the acoustic waves. More than 18 accelerometers were used for the tests, including one that had been pre-installed on the telescope mirror, at the heart of the science instrument.
- During the test, the satellite was subjected to the full spectrum of high sound levels expected at launch, and the state of the satellite before and after the test was compared. If high sound pressures cause damage to a test object, its vibrational response to lower, reference sound levels will change. For CHEOPS this was not the case, so scientists and engineers can now be confident that the acoustic noise requirement has been met. On this occasion, it was particularly important to qualify the fully integrated solar arrays equipped with solar cells, as the cells underwent acoustic testing for the first time.
- After acoustic noise testing, the spacecraft was transported to the Maxwell EMC facility, also at ESTEC. Electromagnetic compatibility testing had previously been performed at the equipment level and the subsystem level . The latest satellite-level EMC testing included both auto-compatibility tests, to show that radio emissions from onboard subsystems do not compromise the sensitive science measurements, and susceptibility tests, to ensure that the spacecraft systems are not adversely affected by radio emissions from external sources, for example transmitters on the launch vehicle or radars in and around the launch site. An everyday example of an electronic device being affected by electromagnetic interference is a car radio hissing and crackling when the car passes under electric tram lines.
- The test chamber of the Maxwell EMC facility is designed using a different principle from the ones underlying the LEAF facility. Whereas the LEAF acoustic test chamber has reflecting walls to produce a reverberant sound field, EMC testing is performed in what is called an anechoic chamber, with walls that absorb radio waves and simulate an environment that, for what concerns radio emissions, is similar to that of outer space.
- The absence of reflections is necessary to recreate the electromagnetic fields created by a two-way radio link between Earth and an orbiting satellite. It also allows the spacecraft to be irradiated from selected angles associated with, for example, transmitters on the launcher. For the recent susceptibility tests, three incident directions, corresponding to those for which the satellite is expected to be most susceptible to electromagnetic interference, were tested separately. In addition, the level of radio emissions generated by the CHEOPS satellite in its launch configuration was characterized during the test, in order to ensure that any radio emission produced by the satellite does not interfere with the launch vehicle.
- The satellite was mounted on a support that allowed it to be tilted and rotated, so that it could be irradiated by test antennas from different angles. Selected voltage, current and temperature readings from onboard sensors were monitored to ensure that the satellite was not unduly disrupted by the emissions of the test antennas, which covered the frequency range 10 kHz to 40 GHz.
- For the auto-compatibility tests, it was important to ensure that the in-orbit operations of the satellite do not affect the science instrument. This was confirmed by acquiring images with the instrument's CCD under carefully controlled conditions. A tiny pinhole was used to allow light from a special lamp to enter the telescope tube and, while data was transmitted and received via radio link, the performance of the sensitive science instrument was monitored.
- After a successful series of EMC tests, which complete the satellite's environmental campaign, CHEOPS left ESTEC for Airbus Defence and Space Spain in Madrid. In the remaining part of the year, the satellite will undergo a final set of tests before being declared ready for launch. Key activities will include the propulsion module leak check, the post-environmental campaign solar array tests, the measurement of the mass and moment of inertia, and the launcher fit check.
- After installation of the latest flight software version, CHEOPS will be subjected to a number of functional tests at sub-system and system level, including the last of the planned System Validation Tests, during which the spacecraft will be controlled from the Mission Operations Center in Spain. The Qualification & Acceptance Review is expected to start in November and to be completed by February 2019, leading to the declaration of CHEOPS as 'fit-to-fly'.
• September 26, 2018: ESA’s exoplanet-surveying CHEOPS satellite, with its distinctive main telescope instrument, seen being prepared for testing within ESA’s LEAF (Large European Acoustic Facility) at the Agency’s ESTEC Test Center in Noordwijk, the Netherlands this month. 51)
- LEAF can subject satellites to the same volume of noise a launcher produces as it takes off and flies through the atmosphere. One wall of the chamber – which stands 11 m wide by 9 m deep and 16.4 m high – incorporates a set of enormous sound horns. Nitrogen shot through the horns can produce a range of noise up to more than 154 decibels, like standing close to multiple jets taking off.
- ESA’s CHEOPS satellite will measure the sizes of known exoplanets by detecting tiny fluctuations in the light of their parent stars. CHEOPS (CHaracterizing ExOPlanet Satellite) combines a state-of-the-art scientific performance with a compact design – 1.5 m by 1.4 m by 1.5 m in size, it has a mass of about 300 kg fully fuelled – allowing it to be flown as a secondary passenger on a Soyuz launcher inside its ASAP-S adapter.
- A test version of Cheops – its ‘structural qualification model’ plus ‘instrument structural and thermal model’ – underwent previous LEAF testing back in November 2015. Once its acoustic testing was complete this final Cheops ‘flight model’ went on to electromagnetic compatibility testing in ESA’s Maxwell facility.
- Once its test campaign is complete, the satellite is scheduled for launch readiness at Europe’s Spaceport in French Guiana early next year.

• On 30 August 2018, CHEOPS was delivered to ESA/ESTEC or acoustic noise and electromagnetic compatibility tests. When these are complete, the satellite will return to Airbus Defence and Space Spain in Madrid for the final preparations before being shipped to Europe’s spaceport in Kourou for launch. 52)
• August 27, 2018: Two plaques etched with thousands of miniaturized drawings made by children have been unveiled in a dedicated ceremony held today in Switzerland. 53)
- Three years ago, thousands of children were inspired by the study of planets beyond our Solar System and translated their imagination into beautiful drawings, which feature a variety of planets and other cosmic settings. Out of the many excellent entries, over 2700 were selected to fly on ESA's CHEOPS (CHaracterizing ExOPlanet Satellite).
- CHEOPS will make high-precision measurements of stars, monitoring the small changes in brightness due to the transit of a planet across the star's disc, in order to determine the planet’s size. Combined with known information about the planet's mass, CHEOPS will enable the density of the planet to be calculated, and as such determine if it is a rocky, icy, or even a water-world for example – a first step to characterize exoplanets.
- "CHEOPS is ESA's first small-class science mission and its task is big. The first step characterization of the Earth-to-Neptune size planets that CHEOPS will target is an essential step to piecing together what these planets are made of, and towards the long-term search for habitable worlds beyond our own Solar System," says Jan Wörner, ESA Director General.
- "This unique satellite, the product of European collaboration, has already inspired the young generation, seen in the drawings engraved on the plaques unveiled today as CHEOPS begins its final stages of preparations before moving to the launch site."
- While the satellite was being assembled earlier this year, a team at the Bern University of Applied Sciences in Burgdorf, Switzerland miniaturized the drawings and engraved them onto two titanium plates. Each plaque measures nearly 18 cm across and 24 cm high.
- The spacecraft has recently completed a series of tests at RUAG Space in Zurich, Switzerland, and today was presented to media and invited guests with the two plaques now attached.
• July 5, 2018: The latest CHEOPS test campaign can be thought of as the first full dress rehearsal for in-flight mission operations. In May, scientists at SOC (Science Operations Centre) at the University of Geneva, Switzerland, were able to instruct the instrument on the CHEOPS satellite, currently located at Airbus Defence and Space Spain in Madrid, to expose the CCD (Charge Coupled Detector) and to retrieve the resulting image. Previous tests have not involved the SOC, so this is the first time that such an end-to-end operation has been demonstrated. 54)
- This test campaign, which combined the SVT-2 (System Validation Test-2) with the SOVT (System Operational Validation Test), was completed during seven days of coordinated effort between Geneva, the Mission Operations Centre (MOC) in Torrejón, Spain, and Madrid. It is the penultimate System Validation Test (SVT) in the series of tests reported in CHEOPS journals #4 (SVT-0), #8 (SVT-1A) and #10 (SVT-1B).
- Gathering data with CHEOPS will be extremely efficient because the telescope will observe stars with known planets: the orbital periods of these planets are also known and observations can therefore be made at just the right time to catch the dimming caused by planetary transits. The scientists responsible for mission planning at the SOC will use the planet ephemerides to draw up a detailed activity plan to tell the spacecraft where to point in the sky and when.
- The activity plan will be defined on a weekly basis and uploaded to the spacecraft via the MOC. There, telescope operators will verify that the activity plan can be executed correctly, for example, by checking that the telescope always points more than 120 degrees away from the direction to the Sun, before converting it to telecommands and transmitting them to the spacecraft.
- New data gathered by the satellite will be sent to a ground station and relayed back to scientists at the SOC via the MOC. There are two CHEOPS ground stations near Madrid, the main one is located in Torrejón and a back-up is located in Villafranca.
- The goal of the SVT-2/SOVT campaign was to test and validate the entire end-to-end process described above, including simulating data transmission during ground station passes. It was also possible to validate the critical sequence of events that will be performed in the first days after launch and in the subsequent two months, when the spacecraft platform and the science instrument are readied for the science operations.
- Of course, no astronomical images could be acquired during the tests, since the telescope was in the cleanroom and not pointing towards the sky. For the purpose of this campaign, it was sufficient to ensure that the science instrument could be instructed to acquire dark images with the baffle cover closed, and that these could be correctly transmitted from the cleanroom in Madrid to the SOC in Geneva.
- The results of the latest tests demonstrate that the mission is ready to progress to the next phase. Now that the mechanical and electrical integration of the telescope with the platform is complete, preparations for a series of environmental tests are underway.
- Now fully-integrated, the spacecraft is being shipped in July to Airbus EVT in Toulouse, France, to undergo thermal tests. It will then travel on to RUAG in Zurich, Switzerland, for vibration tests, and further to ESA's technical center in The Netherlands, for acoustic and electromagnetic compatibility tests. Finally, it will come back to Airbus Defence and Space Spain in Madrid, where the last system validation test (SVT-3) will be performed to check readiness for the launch and early operations phase of the mission.
- As the spacecraft moves from country to country, and from test to test, it is an exciting period for the CHEOPS team as they scrutinize every detail of the mission to ensure that the spacecraft is primed and ready before shipment to Europe's Spaceport in Kourou, French Guiana.
• May 3, 2018: Members of the CHEOPS consortium could be proud of their achievement as the science instrument of the upcoming exoplanet mission left Bern on its journey to Madrid last month. 55)
- The science instrument and its tailor-made handling equipment left Switzerland by truck in six containers, designed to provide protection from shock, moisture and dust, on 10 April 2018. Its safe arrival in Spain the following day marked a key milestone for the CHEOPS project and enabled Airbus Defence and Space Spain, the prime contractor that has designed the spacecraft, to integrate the science instrument and the spacecraft platform and begin test activities.
- The science instrument, including among other elements the telescope and CCD (Charge Coupled Detector) cannot operate without the satellite platform, which comprises solar panels, thrusters, radio transmitters and reaction wheels for providing power, propulsion, communications and attitude control.
- The shipment of the science instrument follows an intense period of qualification and calibration activities at the University of Bern, with the instrument team racing against the clock to deliver the instrument to the spacecraft prime contractor so that CHEOPS can be ready for launch by the end of this year. The key objective of the calibration campaign was to collect the data needed to convert the signals measured by the instrument into values that can be used to determine astrophysically meaningful quantities.
- CHEOPS will make observations of exoplanet-hosting stars to measure small changes in their brightness due to the transit of a planet across the star disc.
- The light from point-like stars will be collected by the telescope and directed onto multiple pixels of the detector to form an image that astronomers call the PSF (Point Spread Function). Knowledge of the shape of the PSF is needed to make sure that the instrument is used in an optimal way. It is essential that any changes in the measured signal caused by transiting planets can be distinguished from changes caused by environmental effects such as variations in the temperature of the instrument or electromagnetic disturbances.
- The calibration campaign conducted in Bern over the past three months involved such sensitive measurements that even the body heat of people in the cleanroom housing the reference sources had to be taken into account. Reassuringly, it was determined that the thermal stability of the telescope was satisfactory and even exceeded the design requirements.
- A number of calibration activities focused on the electronics of the CHEOPS detector. As photons from CHEOPS target stars strike the silicon surface of the CCD, they will be converted into electrons. The resulting charge will be turned into a voltage that must be sampled and digitized. The response of the electronics in this process is unique to CHEOPS and must be calibrated and optimized.
- As a result of the tests completed in Bern, astronomers believe that the CHEOPS instrument can achieve the scientific objectives for which it has been built, and it is with hope and excitement that they can look forward to the new science that the satellite will enable once operating in space.
- Once the final integration checks have been made in Madrid and the last calibration data have been analyzed, most members of the instrument team in Bern will be able to consider their job done. After much hard work, they will be looking forward to the launch eagerly.
- Others will continue work on the remaining elements of the mission, starting with the team at Airbus Defence and Space Spain. The upcoming activities will provide an opportunity to train the future operations team and will include system validation tests to ensure smooth end-to-end operations involving the integrated spacecraft, the mission operations center in Torrejón, Spain, and the science operations center in Geneva, Switzerland. These tests will be followed by thermal tests in France, vibration tests in Switzerland and acoustic tests at ESTEC, ESA's technical center in The Netherlands.
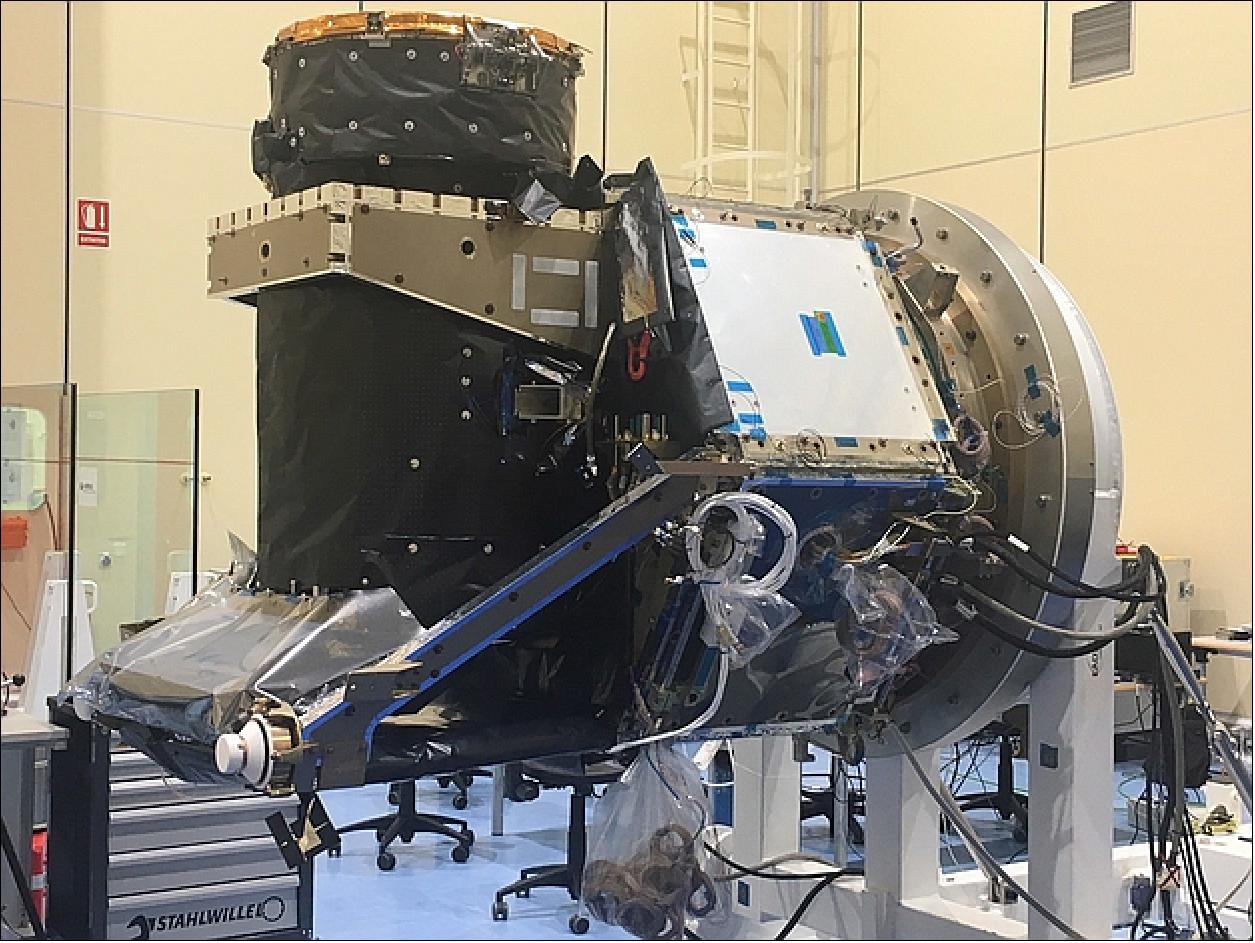
• March 29, 2018: A colorful design capturing the essence of ESA’s CHEOPS mission, which will measure the size of planets as they cross in front of their parent stars, has been selected for the rocket carrying the satellite into space. 56)
- More than 300 were submitted to the competition that offered graphic designers and artists the unique opportunity to feature their work on the rocket that will launch CHEOPS into Earth orbit. -The design will be placed, together with ESA’s and other logos, on the Soyuz rocket’s fairing, the tough outer shell that protects the satellite during launch and as it passes through the atmosphere into space.

• December 18, 2017: With the flight models of the CHEOPS spacecraft and telescope maturing, crucial tests can now be run with real hardware in place of simulations. The latest such tests involved operating the payload with the Mission Control System to test and validate real operational command sequences. 57)
- In the field of space engineering, not everything that is essential is glamourous. When a missing minus sign in a single line of software could have irreparable consequences, system engineers need to be meticulous. A determined team of CHEOPS engineers has been hard at work to ensure that a complex ensemble of subsystems work together to deliver precious science data.
- In September, another step on the path towards launch was taken when the CHEOPS spacecraft platform began relaying instructions to a model of the scientific instrument at Airbus Defence and Space - Spain in Madrid. While the flight model of the instrument was under construction over a thousand kilometers away in Bern, tests aimed at preparing for its integration with the spacecraft platform were conducted using an engineering model of the detector and electronics hardware.
- The aim of these tests was to ensure that all procedures requiring communication between the spacecraft platform and the telescope instrument will execute flawlessly. These procedures include capturing images, generating housekeeping data, such as the so-called 'heartbeat report' that lets operators know that the instrument is still operational, and executing an attitude control loop to keep CHEOPS locked onto a target star.
- For accurately measuring the radii of transiting exoplanets, the instrument is designed to have a pointing error of less than 8 arcseconds of jitter during a 48-hour observation, equivalent to an Olympic archer keeping a steady aim at the bullseye from a distance of over 3 km. The attitude of the spacecraft will routinely be sensed by two star trackers; however, during long observations, the attitude of the orbiting spacecraft relative to the Sun will change, resulting in variations in how the structure is heated. This in turn will cause small thermoelastic deformations of the telescope structure inducing a varying offset between the line of sight of the telescope and the attitude sensed by the star trackers. To correct for this subtle effect, the onboard AOCS (Attitude and Orbit Control System) uses the centroid of the target star as provided by the instrument and, if the centroid position moves, it instructs the spacecraft to correct the pointing drift with fine adjustments that keep the star centered in the image.
- Testing this control loop involved providing a set of simulated images to the control system and monitoring the reaction of the control algorithms carefully. As every maths student or anyone who has ever had to write a computer program knows, in a long sequence of calculations, errors can easily result from misplaced positive or negative signs, and, since the AOCS control loop involves a series of sub-units using particular sign conventions for positive and negative changes, dedicated tests were required to verify that the correct sign conventions have been applied throughout the control chain.
• December 6, 2017: The scientific instrument, the Telescope, at the heart of the CHEOPS mission has been fully assembled, marking an important milestone in the development of this small, fast-track exoplanet-characterizing mission. 58)
- The FPM (Focal Plane Module), which houses the CCD detector array and the FEE (Front-End Electronics), was secured in place on the telescope assembly at the University of Bern this month (Figure 59), completing the construction of the ultra-high-precision photometer that will be used to measure, with high accuracy, the radii of planets orbiting nearby stars. This instrument will now be calibrated at Bern and later integrated with the spacecraft platform, which is currently undergoing final testing in Madrid at the premises of the prime contractor, Airbus Defence and Space–Spain (ASE).
- The design and development of the CHEOPS instrument is the result of a pan-European endeavour that has drawn together experts from across the continent. The instrument structure was designed and manufactured in Switzerland, the optics came from Italy, the baffle from Belgium, the data processing unit and flight software from Austria, the radiators from Hungary, and the FPM, which was assembled in Germany, uses a CCD detector manufactured in the United Kingdom.
- It has taken over four years of effort to get this far. The CHEOPS instrument consortium started work in mid-2013 and the manufacturing phase of the flight model began at the end of 2015. An intense period followed, during which the subsystems were manufactured and tested prior to shipment to the University of Bern for final integration.
- Although the flight model of the FPM was integrated this month, preparations for its optical alignment have been taking place using a fully representative engineering model of the focal plane and the flight telescope, which became available last May. Alignment procedures have been rehearsed carefully and a test campaign under low-temperature, vacuum conditions has been carried out to ensure that the alignment performed in ambient conditions will give the expected result in orbit. To do this, the instrument was placed inside a vacuum chamber and illuminated from the outside, while the detector and the telescope tube were cooled to their operational temperatures of -40 °C and -10 °C, respectively. By accurately measuring how the shape and size of a star-like image changed as the instrument went from ambient conditions to cold operating conditions, it was possible to evaluate the accuracy of the in-orbit alignment.
- The precise optical alignment must also withstand the mechanical loads that will be experienced at launch. To verify this, the FPM engineering model integrated with the flight telescope was equipped with accelerometers and subjected to vibrational testing. The objectives of the vibration test were to verify the structural integrity of the instrument, to measure the structural response to sinusoidal and random excitation, and to determine the resonant frequencies of the instrument in the out-of-plane and in-plane directions between 5 Hertz and 2000 Hertz. Reassuringly, the instrument met all qualification criteria and, in particular, the alignment was confirmed to be preserved.
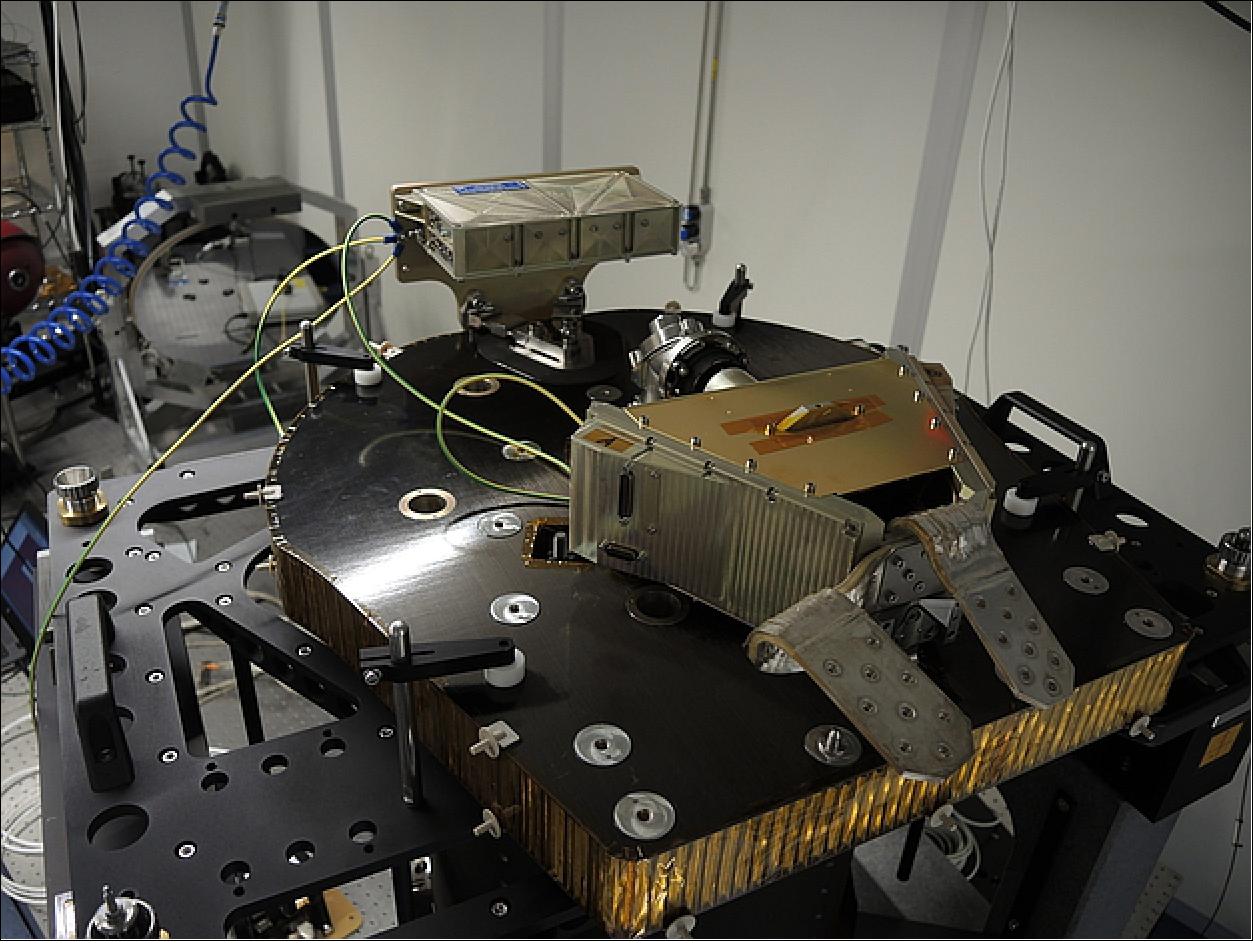
- Once in orbit, CHEOPS will target bright stars that are known to host exoplanets. As the spacecraft changes attitude to point at each target star, sunlight will fall onto the instrument at different angles causing variations in the amount of heating it experiences. In September, thermal testing was performed to ensure that the temperature changes experienced by the CCD detector and the FEE will be within acceptable limits. The tests involved equipping the thermal vacuum chamber at the University of Bern with dedicated heaters to simulate parasitic heat flux from the Sun, and mounting a liquid nitrogen shroud in front of the instrument radiators to simulate the radiative sink temperature expected in space. The tests covered the extremes of the expected operational temperature range and investigated six different thermal balance cases, which were used to consolidate the mathematical thermal model of the instrument. The test results show that all units are able to stay within the allocated operational temperature ranges. Moreover, they provide a high level of confidence that, for all the available pointing attitudes, the stringent thermal stability requirements for the CCD and the FEE (respectively 10 and 50 mK root mean square variation) will be met.
- The instrument team is now entering the final stages of the verification campaign. The EMC (ElectroMagnetic Compatibility) acceptance test will be performed. After this, the final vibration test at instrument level will be made to check workmanship, followed by a measurement to confirm that the alignment of the flight model FPM to the telescope has been maintained.
- The final activity to be completed at the University of Bern will be the Instrument Calibration Campaign. Calibration is essential for characterizing the detector and the flight electronics in terms of photo response non-uniformity, system gain, read-out noise, as well as the shape and variation of the point spread function over the field of view, and for verifying compliance with the instrument performance requirements. This information will be carefully reviewed and used in the processing of the scientific data that CHEOPS will collect once operational.
- With calibration completed, the instrument will be shipped to the spacecraft prime contractor—Airbus Defence and Space–Spain (ASE)—for integration with the spacecraft platform, so that the overall satellite verification can be completed by the end of 2018.
- The delivery of the instrument to the prime contractor will represent a key milestone for the CHEOPS project and is the result of a significant effort in a large number of European institutions.
• July 12, 2017: While the scientific payload is being assembled in Switzerland, work in Spain has focused on preparing the spacecraft platform that will carry the payload and provide power, propulsion, communications, and thermal control. 59)
- After mechanical installation and electrical testing of the individual hardware components, it was important to find out whether the ensemble of hardware units on the platform flight model would behave as required when operated by the attitude and orbital control software. This was successfully demonstrated during the first integrated system tests, when the software control modes were executed using a closed-loop, locally connected set-up. The next step was to validate the remote operation of the platform by issuing commands from a distant location.
- In June, the 1.5 m x 1.4 m x 1.5 m spacecraft platform was put through its paces to test the systems responsible for receiving and executing commands from mission control and transmitting science data back to Earth. The tests involved validating the operational procedures that will allow the spacecraft to be controlled in orbit. For example, by operating the propulsion module to maneuver the spacecraft.

• May 4, 2017: A major milestone for the CHEOPS mission was passed on 28 April 2017, when the telescope flight model was delivered to the University of Bern by Leonardo-Finmeccanica, on behalf of the Italian Space Agency (ASI) and the Italian National Institute for Astrophysics (INAF). 60)
- CHEOPS will perform ultra-high precision photometry on bright stars already known to host exoplanets with typical sizes ranging from Neptune down to that of Earth. It will allow accurate sizes of these exoplanets to be measured for the first time by monitoring how much dimming they cause as they pass between their host stars and the telescope. The CHEOPS telescope has been carefully designed, manufactured, and tested with this scientific objective in mind, and its delivery marks the end of 4 years of intense activity by a multinational team.
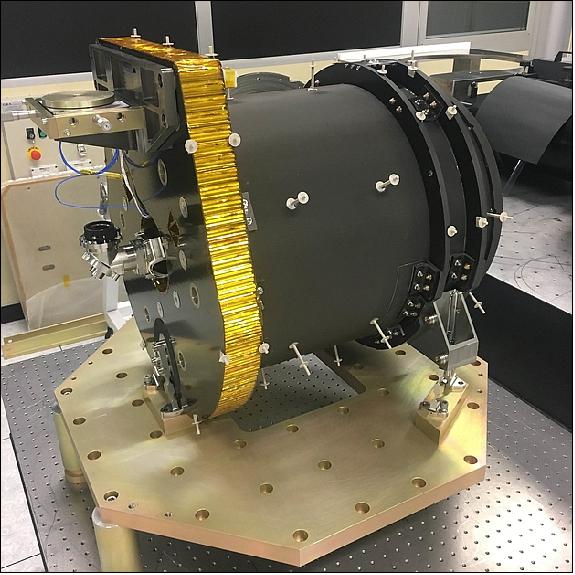
- The delivered hardware consists of the TTA (Telescope Tube Assembly), integrated with the telescope mirrors and back-end optics that will focus starlight onto the CCD detector. The TTA not only supports the optical elements, but is also the structural core of the payload onto which various subsystems – such as the star trackers, the instrument radiator, the baffle, and the focal plane module – will be mounted.
- A key requirement of the mission is that thermal expansion and contraction of the support structure does not cause misalignment of the optical elements resulting in distortions of the images and inconsistent flux measurements. This requirement has been met by manufacturing the telescope structure from carbon-fibre reinforced plastics (CFRP) to achieve a strong, light, and thermally stable design. Since the thermoelastic properties of a CFRP laminate depend on the orientations of the individual laminae, Swiss company Almatech, which was responsible for the TTA structure, designed it down to the lamina level. Finite-element modelling using a 450 000-element model of the entire structure was combined with test sample measurements to select the orientations and stacking sequence of the laminae. The thermal stability of the manufactured structure was then verified with a dedicated test in space-like thermal and vacuum conditions using highly-accurate interferometric measurements.
- After the telescope structure was delivered to Leonardo-Finmeccanica in Florence, the integration of the mirrors and back-end optics – also manufactured by Leonardo-Finmeccanica – took place. The high-precision optics were then aligned using interferometric techniques, after which the optical system was characterized under simulated in-orbit conditions in a thermal-vacuum chamber. In particular, the precise position of the focal plane was established so that the CCD detector can be placed accurately when the focal plane module is mounted.
- To reach the low noise levels required to achieve the science goals of the mission, it is important that the only light arriving at the CHEOPS detector should be that from the star itself, and that light reflected by surfaces within the instrument is kept to a minimum. Both the baffle and the field stop in the back-end optics have been designed to reject this stray light. However, stray light effects can also result from contamination of the optics, and therefore very stringent cleanliness requirements were applied during integration and alignment of the optics. The CHEOPS telescope baffle assembly has a cover to guard against contamination – this is kept closed for almost all further integration activities and will be opened once CHEOPS is in orbit.
- In parallel with the telescope activities, in March, team members from the University of Bern performed electromagnetic compatibility (EMC) testing of an electrical qualification model of the instrument at the EMC-Testcenter AG in Regensdorf. These tests were carried out to confirm that the electronic subsystems of the instrument are compatible with the electromagnetic environment during launch, and to verify that spacecraft operations and science data are not adversely affected by electromagnetic emission from onboard electronics such as the onboard antennae and payload heaters. The test results showed that the instrument complies with the EMC requirements. Integration of the electronic components in the payload can now proceed with confidence.
- Much effort has gone into ensuring that CHEOPS will have a steady gaze, free from electromagnetic interference, thermally-induced artefacts, and stray light, as it stares at the pale shadows of distant exoplanets. The optical and structural core of the payload has completed its journey from Florence, over the Alps, to Bern and a new phase of integration work can now begin.
• January 30, 2017: The CHEOPS spacecraft underwent important testing last year to be ready for launch by the end of 2018. CHEOPS will operate from a low orbit circling Earth, taking its power from the Sun. As such, an important focus of the prelaunch testing is qualifying the satellite’s solar arrays and their cells. 61)
- The image of Figure 62 shows part of the 12 solar cell assemblies in the Vacuum Solar Cell Illumination Facility at ESA/ESTEC in the Netherlands. The cells were heated to high temperatures to reflect what the satellite will experience once in space. In fact, the actual temperatures were scaled in order to accelerate the ageing effects experienced in flight, to represent a 3.5 year mission in just a few months. - The cells spent 2000 hours at 140ºC, 2000 hours at 160ºC and 2090 hours at 175ºC. After the tests, the cells’ maximum power and short circuit current had degraded by less than 2%, clearly below the acceptance criterion of 3%.
- As a result of these tests, the CHEOPS solar arrays and their elements are now ready for the mission. Once in space, Cheops will measure the density of exoplanets with sizes or masses in the super-Earth to Neptune range. Its data will set new constraints on the structure of planets in this mass range, and therefore also on their formation and evolution.
• December 16, 2016: Over the last 10 months, the CHEOPS solar cell assemblies have been put through their paces in the test facilities at industry and in the Solar Generator Laboratory of the Power Systems Division (TEC-EP) at ESTEC (European Space Research and Technology Centre) as part of the qualification campaign. In parallel, the flight solar arrays have been manufactured and delivered. 62)
- As with many ESA missions, the Sun is the sole source of power for CHEOPS and for this reason the solar arrays and their constituent solar cells play a critical role in the operation of the satellite. The CHEOPS solar arrays cover a total geometrical area of about 2.7 m2 with an effective active area of just over 2.1 m2. The 3 fixed panels are body mounted with an angle of 67 degrees between them to provide the best possible illumination by the Sun at a given spacecraft attitude.
- The individual solar cell assemblies comprise AzurSpace 3G30 Triple Junction GaAs/Ge cells, and are provided by Leonardo-Finmeccanica. The 3G30 is a new generation of more efficient cells, which were initially qualified with respect to lifetime requirements only for geostationary orbit missions in the ESA MTG (Meteosat Third Generation) Program.
- Due to stringent thermal stability requirements at instrument level, the satellite will roll around the line-of sight to ensure that instrument radiators are always pointing towards cold space. This, combined with the attitude range, means that the solar cells will be subjected to a range of temperatures and thermal variations that are much larger than those for which the cells were previously qualified, and this is the reason for this 'delta-qualification' that was carried out at ESTEC.

• May 2016: A little more than 3 years after the mission selection, the CHEOPS project is progressing as planned. 63)
• May 2016: After successful PRR and SRR in 2013, PDR in July 2014, a complete instrument STM (Structural and Thermal Model) has been built and successfully tested at instrument and spacecraft level, including a challenging stability test with the flight model of the telescope structure. The instrument EM (Electrical Model) has been tested and provided to Airbus DS beginning of April 2016 and is being tested with the spacecraft EFM (Electrical Functional Model). This provides confidence that the design performs successfully (Ref. NO TAG#.
- The system CDR is expected to be closed by mid-2016 including the instrument CDR. Instrument flight model is under preparation with several flight elements already manufactured and tested. The delivery to the platform contractor is expected mid-2017 for a launch opportunity within 2018.
• March 31. 2016: Thousands of children across Europe have taken part in a competition to submit drawings that will be miniaturized and sent into space onboard ESA’s Cheops astronomy satellite. Out of the many excellent entries featuring a variety of cosmic settings, a total of 3000 were selected. These will now be scanned and shrunk by a factor of 1000 to be engraved on two metal plaques that will be attached to the satellite. 64)
- The competition was coordinated by the University of Bern, Switzerland, the lead institution, and run in collaboration with ESA and mission partner institutions in the Cheops countries: Austria, Belgium, France, Germany, Hungary, Italy, Portugal, Spain, Sweden, Switzerland and the UK.
- The competition ran between May and October 2015 and was aimed at children between the ages of 8 and 14 from ESA member and cooperating states. Around 1700 drawings were sent directly to ESA, while the partner institutions across Europe received thousands more.
• Nov. 11, 2015: A test model of ESA’s exoplanet-watching Cheops satellite is being placed into an acoustic chamber in Europe’s largest spacecraft testing center, helping to ensure the flight version can endure the extreme conditions of a rocket launch. 65)
- The ”Characterizing ExOPlanet Satellite” is ESA’s first small science mission. Selected in October 2012, it will track the crossings of known planets across the face of their parent stars, to make detailed deductions of their size and composition. The telescope will detect tiny shifts in stellar brightness with ultra-high precision.
- Once the tests are completed, this ‘structural qualification model’ will be reconfigured as the actual satellite, helping to meet a tight development schedule that is aiming for launch readiness at the end of 2017 and a shared launch opportunity in the first half of 2018.

• Sept. 30, 2015: The most stable source of light in the world: In order to detect planets similar to planet Earth, the satellite must therefore be able to measure the luminosity of a star with exceptional stability (0.002%). The CHEOPS detectors must be tested using a source of light whose stability is ten times superior than that demanded by the satellite itself. Since no existing light source could guarantee this level of stability, UNIGE (University of Geneva) engineers and technicians and the Swiss PlanetS NCCR (National Center for Competence and Research) designed a brand-new instrument, which produces the most stable light source in the world. Unlike other procedures, which stabilize light at its source, the system developed in Geneva modifies the intensity of a beam of light. By activating a “mobile finger”, which more or less obscures the beam of light, the intensity and finally the stability of the light can be modulated. - The team of the University of Geneva has just filed for a European patent of their most stable light source. 66)
- “We have presented our instrument to the American leaders of the TESS mission, a satellite researching exoplanets, and they were so enthusiastic that they ordered one from us,” said François Wildi, engineer in UNIGE’s Department of Astronomy, and member of PlanetS.
- Having proved themselves in the laboratory setting, thanks to the stable light source, the CHEOPS detectors will then be tested – using the same source, in space conditions, in a University of Bern simulation tank whose temperature variations reflect those that the satellite will encounter in space.
• Sept. 28, 2015: Over the Summer, Airbus Defence and Space (ADS- Spain) completed the manufacturing and integration of the spacecraft platform Structural Qualification Model. In parallel, the Instrument Consortium, led by the University of Bern, completed the test campaign of the instrument Structural and Thermal Model and delivered the model to ADS-Spain. 67)
- The availability of both platform and instrument units allows the integration of the spacecraft-level Structural Model, for which the environmental test campaign is planned to commence at the beginning of October. The first test activities will be mass property measurements carried out at ADS-Spain, followed by vibration tests at the Zürich premises of RUAG, Switzerland.
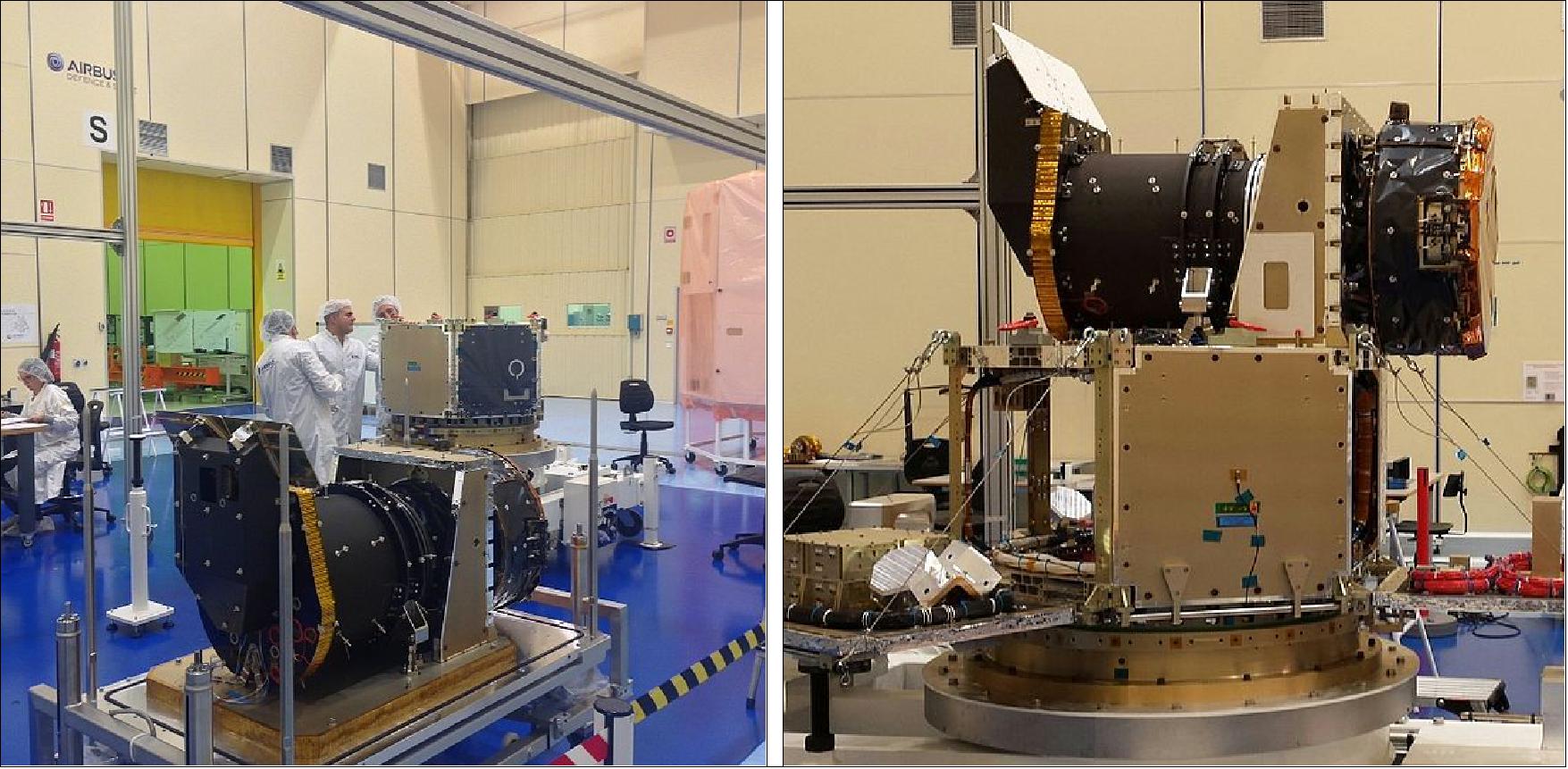
• As of mid-June 2015, the Instrument Consortium is preparing for testing of the instrument structural and thermal model (I-STM), which will take place in Bern and run from mid-July to the end of August. At spacecraft level, tests will start on the structural qualification model at the end of September.
References
1) “ESA Science Program’s new small satellite will study super-Earths,” ESA, Oct. 19, 2012, URL: http://www.esa.int/esaSC/SEMXFG4S18H_index_0.html
2) Frederic Safa, Fabio Favata, Nicola Rando, Ana Heras, “ESA CHEOPS Mission: Implementation Approach and Status,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
3) W. Benz, Ch. Broeg, T. Barczy, W. Baumjohann, M. Deleuil, D. Ehrenreich, A. Fortier, M. Gillon, A. Gutierrez, L. Kiss, A. L.-d-Etangs, R. Liseau, G. Olofsson, G. Piotto, D. Pollacco, D. Queloz, R. Ragazzoni, E. Renotte, N. Santos, T. Spohn, M. Steller, N. Thomas, S. Udry, and the CHEOPS Team, “CHEOPS: ESA First Small Science Mission ‐ Scientific Objectives, Mission Concept, and Challenges for the Scientific Community,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
4) J. Asquier, C. Corral van Damme, N. Rando, F. Ratti, et al., “CHEOPS Spacecraft Challenges,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
5) ”CHEOPS CHaracterizing ExOPlanet Satellite,” ESA, URL: http://www.cosmos.esa.int/web/cheops
6) T. Beck, A. Fortier, V. Cessa, C. Broeg, W. Benz, N. Rando, J. Asquier, C. Corral Van Damme, K. Isaak, F. Ratti, F. Safa, R. Southworth, A. Borges, D. Cortes, D. De Miguel, R. Palacios, F. Wildi, B. Chazelas, A. Deline, M. Beck, ”CHEOPS launch in 2019! - Payload capabilities and in-orbit commissioning preview,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-V-01, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4387&context=smallsat
7) V. Cessa, T. Beck, W. Benz, C. Broeg, D. Ehrenreich, A. Fortier, G. Peter, D. Magrin, I. Pagano, J.-Y. Plesseria, M. Steller, J. Szoke, N. Thomas, R. Ragazzoni, F. Wildi, and the CHEOPS Team, “CHEOPS: A space telescope for ultra-high precision photometry of exoplanet transits,” Proceedings of the ICSO (International Conference on Space Optics), Tenerife, Canary Islands, Spain, Oct. 7-10, 2014, URL: http://congrexprojects.com/Custom/ICSO/2014/Papers/2.%20Wednesday%208%20October
/Session%206C%20Sci%20and%20Focal%20Plane%20Instruments/2.66888_Cessa.pdf
8) ”Exoplanet mission timeline,” ESA, 27 August 2018, URL: http://m.esa.int/spaceinimages/Images/2018/08/Exoplanet_mission_timeline
9) http://m.esa.int/Our_Activities/Space_Science/Highlights/Exoplanet_imaginarium
10) Javier Sánchez Palma, Andrés Borges Alejo, David Cortes Salan, Nicola Rando, Francesco Ratti, Carlos Corral Van Damme, Joel Asquier, ”CHEOPS: ESA first small science mission- platform development status and challenges,” Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/
default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
11) “CHEOPS exoplanet mission meets key milestones en route to 2017 launch,” ESA, July 11, 2014, URL: http://sci.esa.int/cheops/54321-cheops-exoplanet-mission-meets-key-milestones-en-route-to-2017-launch/
12) A. Borges, T. Montes, D. Cortes, “CHEOPS mission: A low cost platform for Science,” 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1007P
13) Ignacio Melendo, Miguel Canay, “CHEOPS thermo-mechanical architecture; downscaling SEOSAT platform,” 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1209P
14) A. López-Pina, A. Pizarro, L. Torres, “Adaptation of an Earth Observation AOCS to an exoplanet characterization mission,” 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-1409P
15) Iraklis Hatziathanasiou, Juan Ignacio Ramirez Martinez, Alberto Busso, Stephen Newbold, ”Space COTS in Institutional missions. Balancing costs vs risks in CHEOPS mission,” Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
16) J. Asquier, N. Rando, C. Corral Van Damme, F. Ratti, K. Isaak, R. Southworth, F. Safa, C. Broeg, T. Beck, W. Benz, A. Borges, D. Cortes and R. Palacios, ”CHEOPS: the ESA mission for exo-planets characterization ready for launch,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-IV-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4376&context=smallsat
17) ”Arianespace’s last mission of the year a complete success: COSMO-SkyMed Second Generation, CHEOPS, OPS-SAT, EyeSat and ANGELS now in orbit,” Arianespace, 18 December 2019, URL: https://www.arianespace.com/press-release/arianespaces-last-mission-of-the-year-a-complete-success-cosmo-skymed-second-generation-cheops-ops-sat-eyesat-and-angels-now-in-orbit/
18) ”Liftoff for Cheops, ESA’s exoplanet mission,” ESA Science & Exploration, 18 December 2019, URL: http://www.esa.int/Science_Exploration/Space_Science/
Cheops/Liftoff_for_Cheops_ESA_s_exoplanet_mission
19) Stephen Clark, ”Soyuz • CSG 1 & CHEOPS,” Spaceflight Now, 7 October 2019, URL: https://spaceflightnow.com/launch-schedule/
20) ”Cheops liftoff,” ESA Science & Exploration, 18 December 2019, URL: http://www.esa.int/ESA_Multimedia/Videos/2019/12/Cheops_liftoff
21) ”Cheops reveals a rugby ball-shaped exoplanet,” ESA Science & Exploration, 10 January 2022, URL: https://www.esa.int/Science_Exploration/
Space_Science/Cheops/Cheops_reveals_a_rugby_ball-shaped_exoplanet
22) S. C. C. Barros, B. Akinsanmi, G. Boué, A. M. S. Smith, J. Laskar, S. Ulmer-Moll, J. Lillo-Box, D. Queloz, A. Collier Cameron, S. G. Sousa, D. Ehrenreich, M. J. Hooton, G. Bruno, B.-O. Demory, A. C. M. Correia, O. D. S. Demangeon, T. G. Wilson, A. Bonfanti, S. Hoyer, Y. Alibert, R. Alonso, G. Anglada Escudé, D. Barbato, T. Bárczy, D. Barrado, W. Baumjohann, M. Beck, T. Beck, W. Benz, M. Bergomi, N. Billot, X. Bonfils, F. Bouchy, A. Brandeker, C. Broeg, J. Cabrera, V. Cessa, S. Charnoz, C. C. V. Damme, M. B. Davies, M. Deleuil, A. Deline, L. Delrez, A. Erikson, A. Fortier, L. Fossati, M. Fridlund, D. Gandolfi, A. García Muñoz, M. Gillon, M. Güdel, K. G. Isaak, K. Heng, L. Kiss, A. Lecavelier des Etangs, M. Lendl, C. Lovis, D. Magrin29, V. Nascimbeni29, P. F. L. Maxted15, G. Olofsson18, R. Ottensamer33, I. Pagano10, E. Pallé17,20, H. Parviainen17,20, G. Peter4, G. Piotto29,30, D. Pollacco16, R. Ragazzoni, N. Rando, H. Rauer, I. Ribas, N. C. Santos, G. Scandariato, D. Ségransan, A. E. Simon, M. Steller, Gy. M. Szabó, N. Thomas, S. Udry, B. Ulmer, V. Van Grootel and N. A. Walton, ”Detection of the tidal deformation of WASP-103b at 3 σ with CHEOPS,” Astronomy&Astrophysics, Vol. 657, 11 January 2022, https://doi.org/10.1051/0004-6361/202142196
23) ”Unique exoplanet photobombs Cheops study of nearby star system,” ESA Science & Exploration, 28 June 2021, URL: https://www.esa.int/Science_Exploration/Space_Science/
Cheops/Unique_exoplanet_photobombs_Cheops_study_of_nearby_star_system
24) Laetitia Delrez, David Ehrenreich, [...]Nicholas A. Walton, ”Transit detection of the long-period volatile-rich super-Earth Nu2 Lupi d with CHEOPS,” Nature Astronomy, Published: 28 June 2021, https://doi.org/10.1038/s41550-021-01381-5
25) ”ESA’s exoplanet watcher Cheops reveals unique planetary system,” ESA Science & Exploration, 25 January 2021, URL: https://www.esa.int/Science_Exploration/Space_Science/
Cheops/ESA_s_exoplanet_watcher_Cheops_reveals_unique_planetary_system
26) A. Leleu, Y. Alibert, N. C. Hara, M. J. Hooton, T. G. Wilson, P. Robutel, J.-B. Delisle, J. Laskar, S. Hoyer, C. Lovis, E. M. Bryant, E. Ducrot, J. Cabrera, J. Acton, V. Adibekyan, R. Allart, C. Allende Prieto, R. Alonso, D. Alves, D. R. Anderson et al., ”Six transiting planets and a chain of Laplace resonances in TOI-178,” Astronomy & Astrophysics, Published: 25 January, 2021, https://doi.org/10.1051/0004-6361/202039767, URL: https://arxiv.org/pdf/2101.09260.pdf
27) ”Puzzling six-exoplanet system with rhythmic movement challenges theories of how planets form,” eso2102 — Science Release, 25 January 2021, URL: https://www.eso.org/public/news/eso2102/?lang
28) ”First results from Cheops: ESA’s exoplanet observer reveals extreme alien world,” ESA Science & Exploration, 28 September 2020, URL: https://www.esa.int/Science_Exploration/Space_Science/
Cheops/First_results_from_Cheops_ESA_s_exoplanet_observer_reveals_extreme_alien_world
29) M. Lendl, Sz. Csizmadia, A. Deline, L. Fossati, D. Kitzmann, K. Heng, S. Hoyer, S. Salmon, W. Benz, C. Broeg, D. Ehrenreich, A. Fortier, D. Queloz, A. Bonfanti, A. Brandeker, A. Collier Cameron,L. Delrez, A. Garcia Muñoz, M.J. Hooton, P.F.L. Maxted, B.M. Morris, V. Van Grootel, T.G. Wilson,Y. Alibert, R. Alonso, J. Asquier, T. Bandy, T. Bárczy, D. Barrado, S.C.C Barros, W. Baumjohann,M. Beck, T. Beck, A. Bekkelien, M. Bergomi, N. Billot, F. Biondi, X. Bonfils, V. Bourrier, M-D. Busch,J. Cabrera, V. Cessa, S. Charnoz, B. Chazelas, C. Corral Van Damme, M. B. Davies, M. Deleuil,O.D.S Demangeon, B.-O. Demory, A. Erikson, J. Farinato, M. Fridlund, D. Futyan, D. Gandolfi,M. Gillon, P. Guterman, J. Hasiba, E. Hernandez, K.G. Isaak, L. Kiss, T. Kuntzer,A. Lecavelier des Etangs, T. Lüftinger, J. Laskar, C. Lovis, D. Magrin, L. Malvasio, L. Marafatto,H. Michaelis, M. Munari, V. Nascimbeni, G. Olofsson, H. Ottacher, R. Ottensamer, I. Pagano, E. Pallé,G. Peter, D. Piazza, G. Piotto, D. Pollacco, F. Ratti, H. Rauer, R. Ragazzoni, N. Rando,I. Ribas, M. Rieder, R. Rohlfs, F. Safa, N.C. Santos, G. Scandariato, D. Ségransan, A.E. Simon,V. Singh, A.M.S. Smith, M. Sordet, S.G. Sousa, M. Steller, Gy.M. Szabó, N. Thomas, M. Tschentscher,S. Udry, V. Viotto, I. Walter, N.A. Walton, F. Wildi, and D. Wolter, ”The hot dayside and asymmetric transit of WASP-189 b seen by CHEOPS,” Astronomy & Astrophysics, 23 September, 2020, https://doi.org/10.1051/0004-6361/202038677, ©ESO 2020, URL: https://www.aanda.org/articles/aa/pdf/forth/aa38677-20.pdf
30) ”Meet the Experts: Other worlds,” ESA Science & Exploration, 27 July 2020, URL: https://www.esa.int/ESA_Multimedia/Videos/2020/07/Meet_the_Experts_Other_worlds
31) ”Cheops observes its first exoplanets and is ready for science,” ESA Science & Exploration, 16 April 2020, URL: http://www.esa.int/Science_Exploration/Space_Science/
Cheops/Cheops_observes_its_first_exoplanets_and_is_ready_for_science
32) ”Airbus completes In Orbit Commissioning of CHEOPS,” Space Daily, 26 March 2020, URL: https://www.spacedaily.com/reports/
Airbus_completes_In_Orbit_Commissioning_of_CHEOPS_999.html
33) ”Airbus successfully completes In Orbit Commissioning of CHEOPS,” Airbus Press Release, 26 March 2020, URL: https://web.archive.org/web/20210506121104/https://www.airbus.com/newsroom/press-releases/en/2020/03/airbus-successfully-completes-in-orbit-commissioning-of-cheops.html
34) ”A perfect blur – First image by exoplanet watcher Cheops,” ESA / Science & Exploration / Space Science / Cheops, 7 February 2020, URL: http://www.esa.int/Science_Exploration/
Space_Science/Cheops/A_perfect_blur_First_image_by_exoplanet_watcher_Cheops
35) ”Cheops opens its eye to the sky,” ESA / Science & Exploration / Space Science / Cheops, 29 January 20220, URL: http://www.esa.int/Science_Exploration/Space_Science/Cheops/Cheops_opens_its_eye_to_the_sky
36) ”Cheops seen by SAINT-EX telescope,” ESA Science & Exploration, 14 January 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/01/Cheops_seen_by_SAINT-EX_telescope
37) T. Beck,V. Cessa,C. Broeg, W. Benz, F. Ratti, C. Corral, K. Isaak, N. Rando, ”CHEOPS: ESA first small science mission - instrument development status and challenges,” Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
38) “CHEOPS,” University of Bern, URL: http://cheops.unibe.ch/cheops-mission/payload/
39) ”Upper composite of Soyuz (enclosing Cheops),” ESA Science & Exploration, 13 December 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/12/Upper_composite_of_Soyuz_enclosing_Cheops
40) ”Exoplanet satellite encapsulated,” ESA, 2 December 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/12/Exoplanet_satellite_encapsulated
41) ”Cheops transfer,” ESA, 3 December 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/12/Cheops_transfer2
42) ”Cheops arrives in Kourou,” ESA, 17 October 2019, URL: https://www.esa.int/spaceinimages/Images/2019/10/Cheops_arrives_in_Kourou3
43) ”Michel Mayor with early career scientists at ESA,” ESA, 10 October 2019, URL: http://www.esa.int/spaceinimages/Images/2019/10/Michel_Mayor_with_early_career_scientists_at_ESA
44) ”Exoplanet and cosmology discoveries awarded Nobel Prize in Physics,” ESA, 8 October 2019, URL: http://www.esa.int/Our_Activities/Space_Science/
Exoplanet_and_cosmology_discoveries_awarded_Nobel_Prize_in_Physics
45) Andrew Grant, ”Peebles, Mayor, and Queloz share 2019 Nobel Prize in Physics,” Physics Today, 8 October 2019, URL: https://physicstoday.scitation.org/do/10.1063/PT.6.1.20191008a/full
/?utm_source=Physics%20Today&utm_medium=email&utm_campaign=10958239
_Q%20-%20Nobel%202019&dm_i=1Y69,6IVFJ,E1NDQN,PX0UK,1
46) ”Cheops passes final review before shipment to launch site,” ESA, 29 July 2019, URL: http://www.esa.int/Our_Activities/Space_Science/Cheops/
Cheops_passes_final_review_before_shipment_to_launch_site
47) ”Airbus prepares Cheops satellite for launch - Final technical review successfully passed,” Airbus Press Release, 29 March 2019, URL: https://web.archive.org/web/20210509125953/https://www.airbus.com/newsroom/press-releases/en/2019/03/airbus-prepares-cheops-satellite-for-launch.html
48) ”Exoplanet satellite ready,” ESA, 29 March 2019, URL: http://m.esa.int/Our_Activities/Space_Science/Cheops/Exoplanet_satellite_ready
49) ”Cheops in the clean room,” ESA, Space Science Image of the Week, 11 March 2019, URL: http://m.esa.int/spaceinimages/Images/2019/03/Cheops_in_the_clean_room
50) ”#14: CHEOPS - withstanding the sound of launch and avoiding radio interference,” ESA CHEOPS Journal, 17 October 2018, URL: http://sci.esa.int/cheops/
60779-14-cheops-withstanding-the-sound-of-launch-and-avoiding-radio-interference/
51) ”Cheops inside LEAF chamber,” ESA Technology image of the week, 26 September 2018, URL: http://m.esa.int/spaceinimages/Images/2018/09/Cheops_inside_LEAF_chamber
52) ”Cheops arrival at ESA’s technical center,” ESA, 30 August 2018, URL: http://m.esa.int/spaceinimages/Images/2018/08/Cheops_arrival_at_ESA_s_technical_centre3
53) ”Artwork unveiled on exoplanet satellite,” ESA, 27 August 2018, URL: http://sci.esa.int
/cheops/60567-artwork-unveiled-on-exoplanet-satellite/
54) ”#12: From star positions to images: CHEOPS operations centres pull together,” ESA, 5 July 2018, URL: http://sci.esa.int/cheops/60486-12-from-star-positions-to-images-cheops-operations-centres-pull-together/
55) ”#11: Putting things together: the CHEOPS science instrument arrives in Madrid,” ESA, 3 May 2018, URL: http://sci.esa.int/cheops/
60249-11-putting-things-together-the-cheops-science-instrument-arrives-in-madrid/
56) ”Winning exoplanet rocket sticker selected,” ESA, 29 March 2018, URL: http://m.esa.int/Our_Activities/Space_Science/Winning_exoplanet_rocket_sticker_selected
57) ”It's getting real: testing flight hardware with mission control code,” ESA Science & Technology, 18 Dec. 2017, URL: http://sci.esa.int/cheops/59883-10-it-s-getting-real-testing-flight-hardware-with-mission-control-code/
58) ”The CHEOPS scientific instrument is complete,” ESA Science & Technology, 6 Dec. 2017, URL: http://sci.esa.int/cheops/59825-9-the-cheops-scientific-instrument-is-complete/
59) ”Preparing the CHEOPS spacecraft platform and simulating mission operations,” ESA, July 12, 2017, URL: http://sci.esa.int/cheops/
59323-8-preparing-the-cheops-spacecraft-platform-and-simulating-mission-operations/
60) ”CHEOPS telescope arrives at new home,” ESA, 04 May, 2017, URL: http://sci.esa.int/cheops/59012-7-cheops-telescope-arrives-at-new-home/
61) ”CHEOPS solar cells,” ESA, Jan. 30, 2017, URL: http://m.esa.int/spaceinimages/Images/2017/01/Cheops_solar_cells
62) ”CHEOPS solar arrays tested and built,” ESA, Dec. 16, 2016, URL: http://sci.esa.int
/cheops/58643-6-cheops-solar-arrays-tested-and-built/
63) Carlos Corral van Damme, Nicola Rando, Joel Asquier, Francesco Ratti, Richard Southworth, Kate Isaak, ”CHEOPS: ESA first small science mission - from mission concept to CDR in 3.5 years,” Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
64) Three thousand drawings to fly into space on Cheops,” ESA, March 31,2016, URL: http://www.esa.int/Our_Activities/Space_Science/Three_thousand_drawings_to_fly_into_space_on_Cheops
65) ”Cheops entering acoustic chamber,” ESA, Nov. 11, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/11/Cheops_entering_acoustic_chamber
66) ”The most stable source of light in the world,” University of Geneva, Sept. 30, 2015, URL: http://www.unige.ch/communication/press-release/2015/CdP150930-1-EN.html
67) ”CHEOPS prepares for first spacecraft test campaign,” ESA, Sept. 28, 2015, URL: http://sci.esa.int/cheops/56529-2-cheops-prepares-for-first-spacecraft-test-campaign/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top