Chandrayaan-2
Non-EO
ISRO
Quick facts
Overview
| Mission type | Non-EO |
| Agency | ISRO |
| Launch date | 22 Jul 2019 |
Chandrayaan-2 Lunar Mission of ISRO
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
ISRO began India’s planetary exploration program with the successful launch of Chandrayaan-1 orbiter mission to the Moon in 2008. The eleven remote-sensing scientific instruments from ISRO, NASA and ESA onboard Chandrayaan-1 (launched in October 2008) have made significant findings including discovery of water signature, spinal minerals, lunar lava tubes, evidences of recent volcanism, impact-triggered boulder movements and discovery of sputtered atomic oxygen and backscattered helium on the lunar surface. 1)
The Chandrayaan-2 spacecraft to the Moon is a composite module mission consisting of Orbiter, Lander and Rover. Chandrayaan-2 is planned to be launched onboard Geosynchronous Satellite Launch Vehicle (GSLV) in the summer of 2019. The Orbiter will carry the combined stack up to moon till the Lunar Orbit Insertion (LOI). The combined stack is then inserted into a lunar orbit of 100 km x 100 km. The Lander with the Rover is then planned to be separated from the Orbiter for soft-landing on a site near south polar lunar surface.
The overall objective of Chandrayaan-2 is to build on the successes of the Chandrayaan-1 mission, testing new technologies and conducting experiments on the moon. The rover will collect samples from the lunar surface and analyze them on site, relaying data to Earth via the orbiter. The orbiter will map the contents of the surface down to a depth of a few tens of meters and carry out a detailed study of the lunar exosphere.
India’s maiden Moon trip was a significant achievement for its space program, but ended prematurely when ISRO lost contact with the orbiter ten months into the planned two-year mission. However, an instrument on a probe that reached the Moon’s surface did gather enough data for scientists to confirm the presence of traces of water.
Chandrayaan-2 will attempt more ambitious technical maneuvers that will put Indian space technology to the test. For the first time, ISRO will attempt to give a craft a controlled, or soft, landing. The agency has had to develop advanced systems that can guide the lander to a touch down and successfully deploy the rover.
Chandrayaan–2 objectives: 2)
• Expand technologies from Chandrayaan-1 and demonstrate newer technologies for future planetary missions.
• Deploy a Lunar Lander-Rover capable of soft landing on a specified lunar site and deploy a Rover to carry out in-situ analysis of chemicals.
• Carry payloads in the Orbiter craft to enhance the scientific objectives of Chandrayaan-1 with improved resolution.
Spacecraft
Chandrayaan-2 is an ISRO (Indian Space Research Organization) mission comprising the 'Orbiter Craft' and the 'Lander Craft'. The primary objective of Chandrayaan-2 is to demonstrate the ability to soft-land on the lunar surface and operate a robotic rover on the surface. The scientific goals include studies of lunar topography, mineralogy, elemental abundance, the lunar exosphere, and signatures of hydroxyl and water ice.
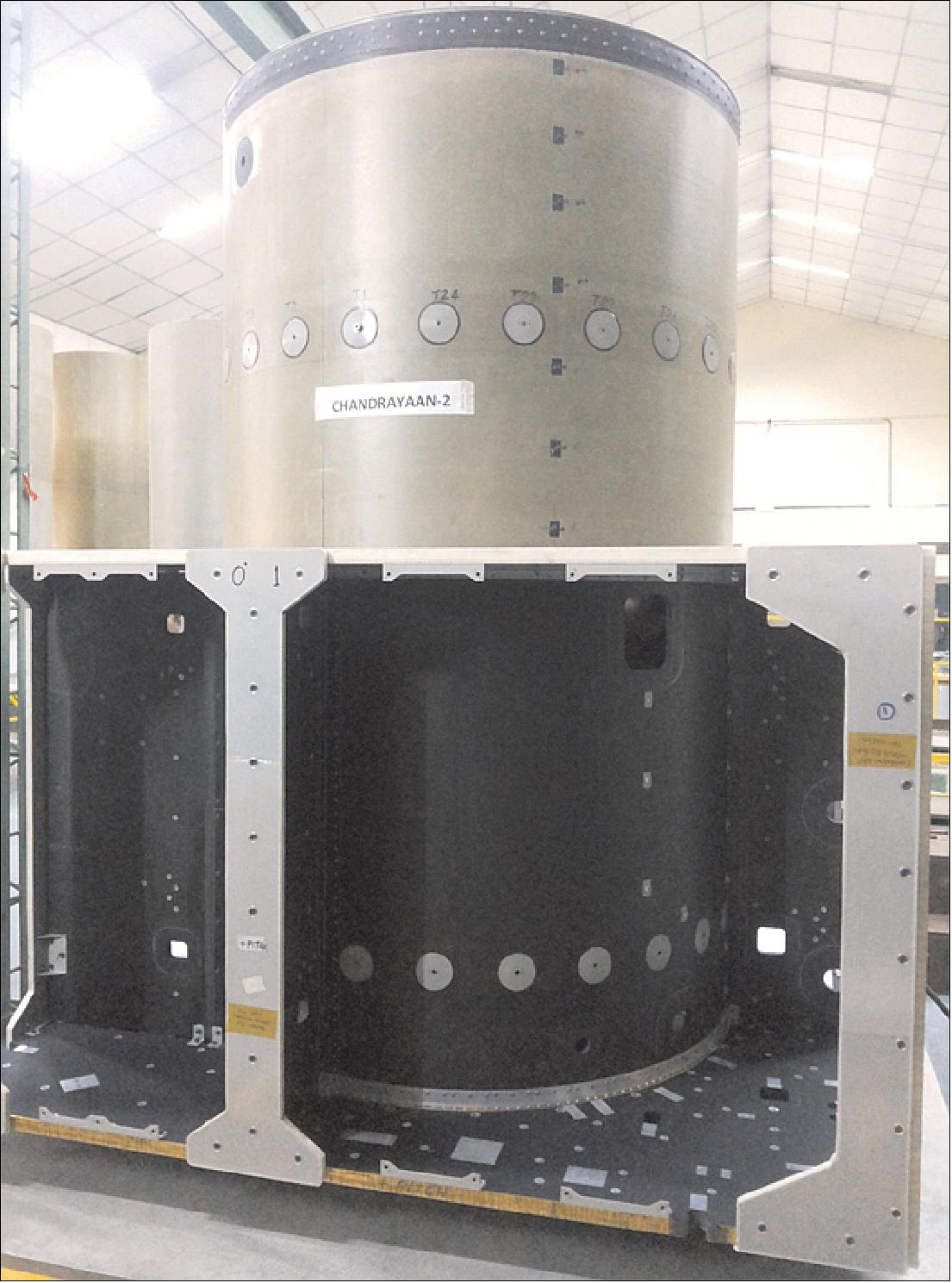
The Orbiter Craft Module structure is a three-metric ton category bus structure made of a central composite cylinder, shear webs and deck panels. It was developed by Hindustan Aeronautics Limited (HAL) and delivered in June 2015 to ISAC (ISRO Satellite Center) where the other spacecraft subsystems and payloads were built onto the structure. 3)
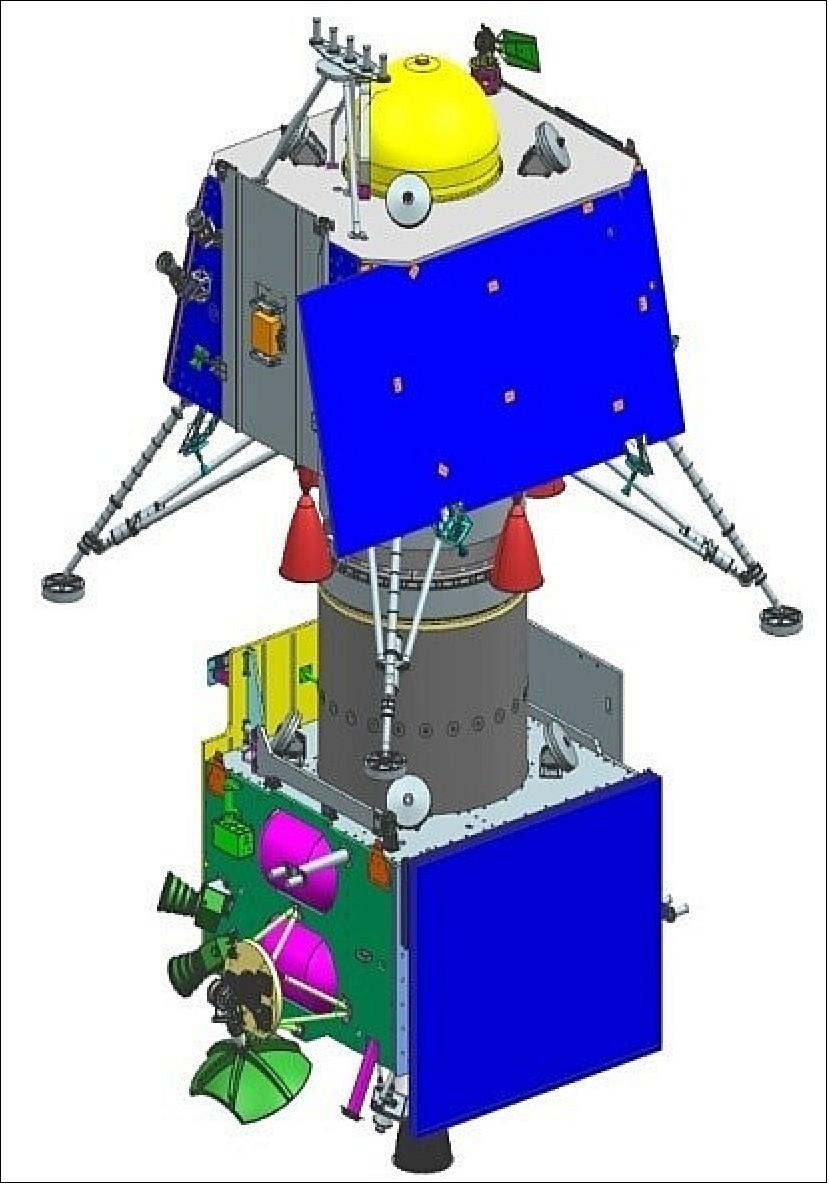
Chandrayaan-2, India’s second lunar mission, has three modules namely Orbiter, Lander (Vikram) & Rover (Pragyan). The Orbiter and Lander modules will be interfaced mechanically and stacked together as an integrated module and accommodated inside the GSLV MK-III launch vehicle. The Rover is housed inside the Lander. After launch into earth bound orbit by GSLV MK-III, the integrated module will reach Moon orbit using Orbiter propulsion module. Subsequently, Lander will separate from the Orbiter and soft land at the predetermined site close to lunar South Pole. 4)
Furthermore, the Rover will roll out for carrying out scientific experiments on the lunar surface. Instruments are also mounted on Lander and Orbiter for carrying out scientific experiments.
Chandrayaan-2 Orbiter Craft is built around a cuboidal structure and houses the propulsion tanks and the separation mechanism of the launch vehicle at one end and lander at the other end. The Orbiter decks have the different housekeeping systems of the Spacecraft. The Solar array consists of two solar panels which are stowed in the launch configuration and deployed on separation to provide the power required for the Orbiter Craft during different phases around the earth and the moon. Lithium Ion battery provides the power support during eclipse and peak power requirements of the spacecraft. Orbiter is a three-axis body stabilized spacecraft with reaction wheels which provide a stable platform for imaging. Thrusters are present for momentum dumping and attitude corrections. A bipropellant liquid engine is used to raise the orbit of the composite from earth parking orbit to 100 km lunar orbit. The attitude and orbit control electronics receive the attitude data from the star sensors and the body rates from the Gyro’s for S/C control. 5)
The other sensors used for spacecraft control are Sun sensors and accelerometers. The telemetry system provides health information of the spacecraft while the telecommand system handles the command execution and distribution. The different payloads on the Orbiter are interfaced to the base band data handling system for formatting and recording in solid state recorder for play back later. The RF system consists of a S-band TTC transponder and X-band transmitter for Payload data transmission to Indian Deep Space Network (IDSN) station. The payload data is transmitted through a X-band dual gimbal antenna which will be pointed to the ground station.
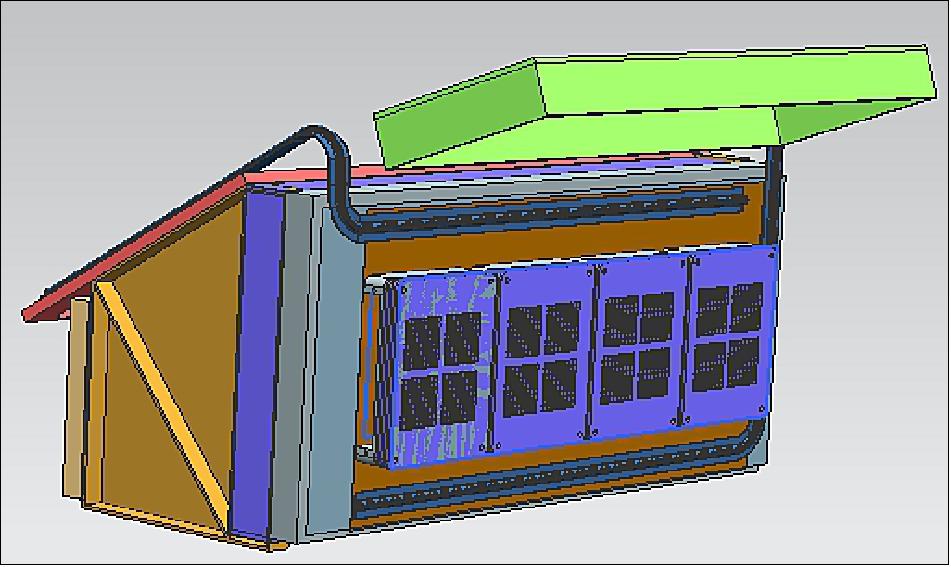
Chandrayaan-2 Lander structure is a truncated pyramid around a cylinder which houses the propellant tank and the interface for the separation mechanism of Orbiter. The vertical panels have solar cells while the stiffener panels house all the electronic systems. The lander leg mechanism (four nos.) provides stability upon landing on different terrains. The body mounted solar panels provide the power for the different systems during the mission in all phases. In addition, lithium ion battery supports the power requirements during eclipse and the lander descent. The Control electronics provide the interface to all the sensors and the actuator drives. The sensors are configured for inertial navigation from separation to the end of rough braking and the absolute sensors determine the position and velocity with respect to the landing site to guide the lander beyond the rough braking phase to the identified site.
The lander Navigation guidance and control will be autonomous from separation onwards and must ensure a precise, safe and soft landing on the lunar surface. The braking thrust for decelerating the lander is provided by four nos. of liquid engines. The attitude of the lander is maintained with eight nos. of thrusters. The lander leg mechanism ensures that the energy at touch down is absorbed and all the lander systems are integral and stable for further conduct of payload deployments and science on moon. Each leg consists of a telescopic leg assembly with crushable damper material in the leg and foot pad. Extensive analysis and tests are done for the lander leg mechanism to ensure stability under extreme terrain conditions and terminal velocity. The TTC communication between the Lander – IDSN is in S-band and the payload data is transmitted by a high torque dual gimbal antenna. The Lander has a TM-TC data handling system with inbuilt storage. The Chandrayaan-2 Rover is stowed in the lander during launch and upon landing the ramps are deployed and Rover starts its journey on the lunar surface. The Lander payloads will be deployed on landing.
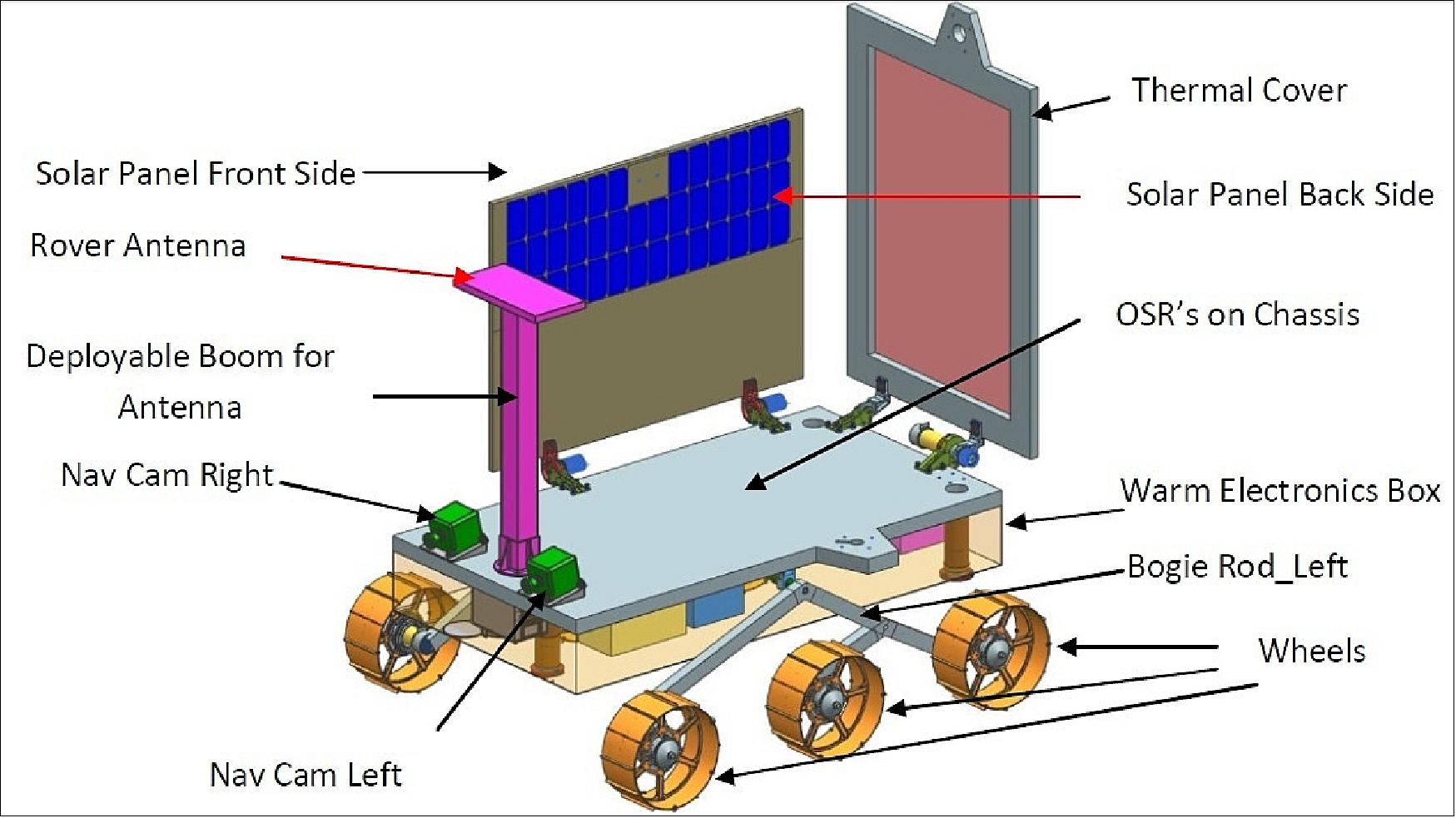
Chandrayaan-2 Rover is a six-wheeled mobility system with the objective of performing mobility on the low gravity & vacuum of moon and in addition conduct science for understanding the lunar resources. The design of the Rover is based on the well-proven space rover “Sojourner” that was deployed by NASA for the exploration of Mars in July 1997. Rover chassis houses all the electronics and has two navigation cameras to generate stereo images for path planning. The deployed solar panel provides the power during the mission. The rocker bogie mechanism along with the six wheels ensure a rugged mobility system over obstacles and slopes along the identified path for exploration of the region. The Rover communicates to the IDSN via the Lander. The two Rover payloads conduct science on the lunar surface.


Launch
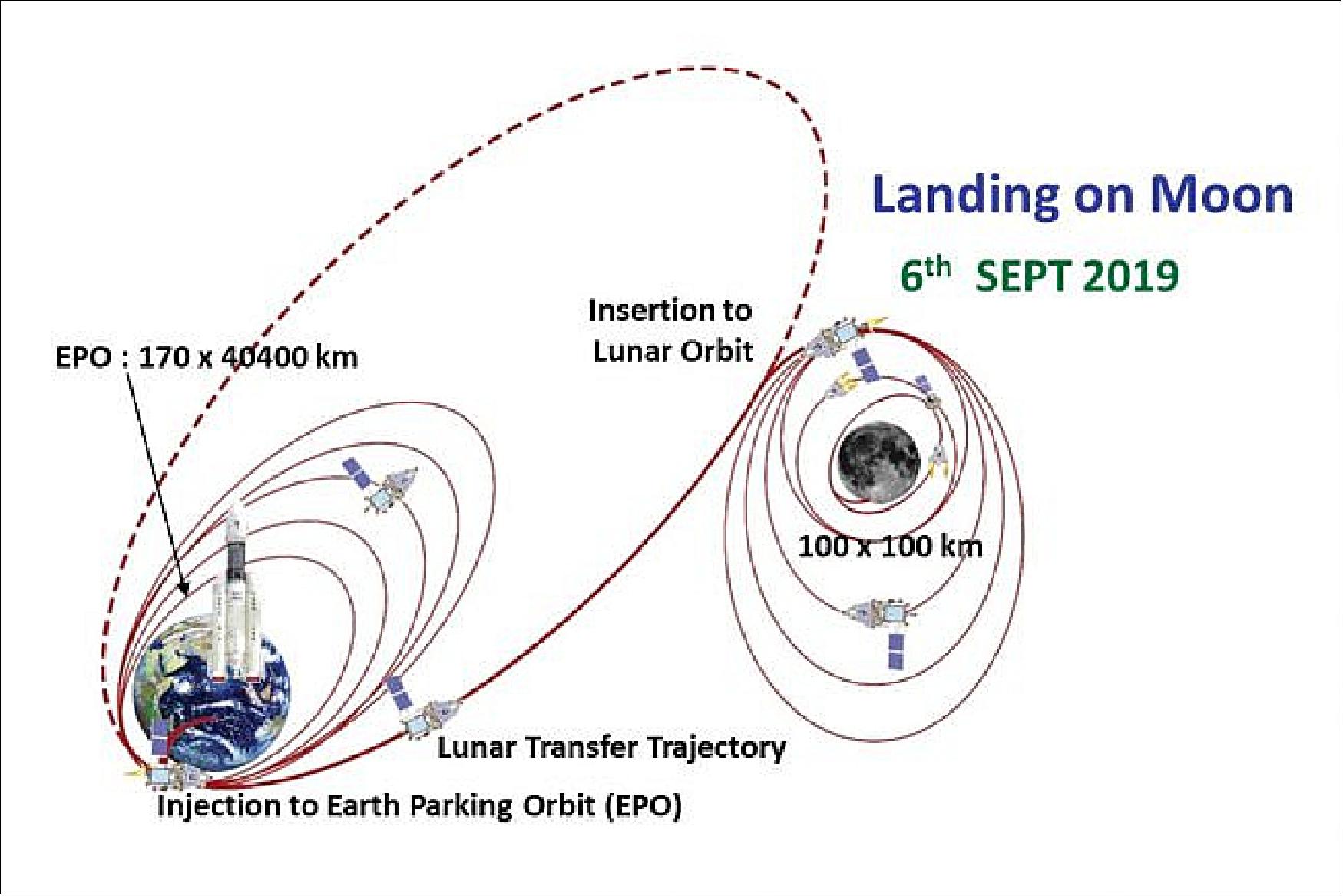
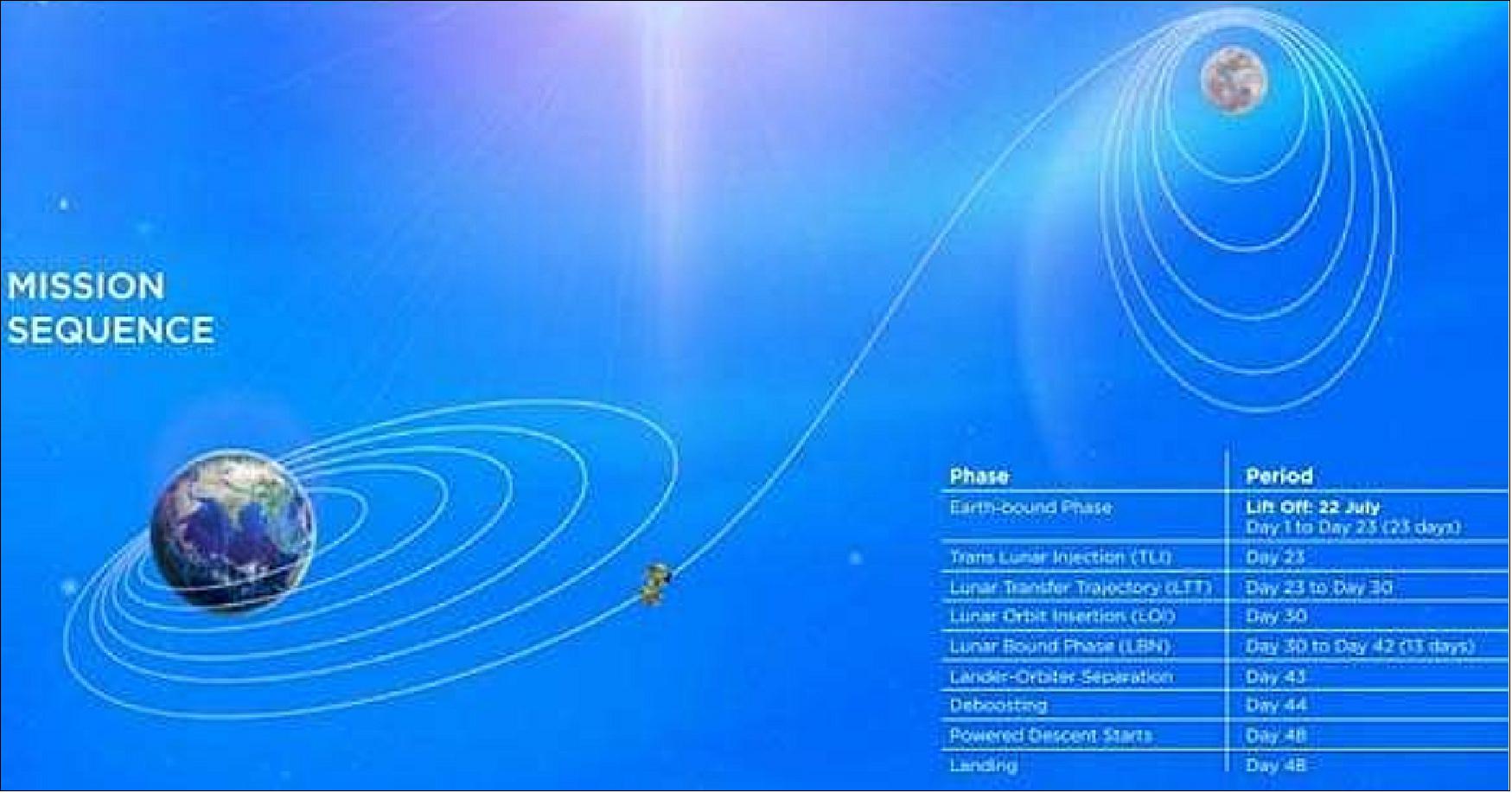
The Chandrayaan-2 mission was launched on 22 July 2019 (09: 13 GMT, with an expected Moon landing on 6 September 2019) using a GLSV (Geosynchronous Satellite Launch Vehicle) Mark III launch vehicle from the SDSC (Satish Dhawan Space Center) on Sriharikota Island. 6) 7)
The lander-orbiter pair will go into an initial elliptical (170 x 45,475 km altitude) Earth orbit, followed by a trans-lunar injection. Both craft go into an initial elliptical lunar orbit. After orbit insertion, the lander and orbiter separate. — The orbiter evolves into a 100 km circular polar orbit and the lander brakes from orbit and lands on the surface in the high latitude areas near the south pole. The orbiter portion of the mission is planned to last 1 year. The rover will be deployed using a ramp shortly after landing and is planned for 14-15 days, one period of lunar daylight.
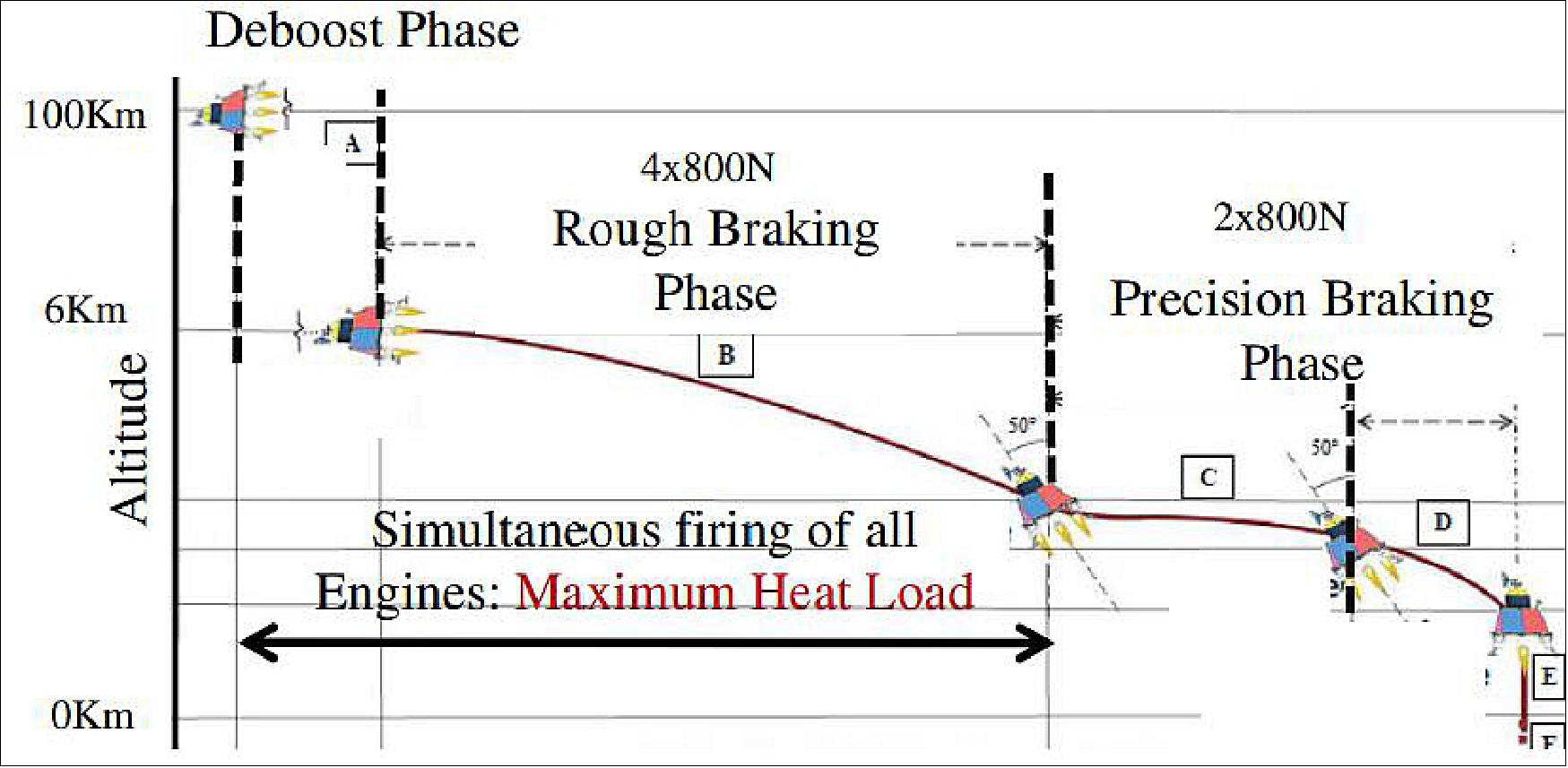
The Chandrayaan-2 mission profile starts with the GSLV MKIII launch vehicle injecting the combined stack of lunar orbiter and lander modules (wet mass ~ 3320 kg) into a Transfer Orbit. The orbiter and lander are injected to a 170 x 45,75 km transfer orbit or EPO (Earth Parking Orbit) by the launch vehicle. A series of mid-course orbit raising maneuvers and the final insertion maneuver are performed to place the spacecraft in a 100 x 100 km circular lunar orbit. Based on mission planning, after achieving the desired initial conditions, the lander is separated from orbiter and a short burn de-boost is carried out to reduce the perilune to 6 km. After a long coast phase, the lander will reach the perilune. Near the perilune, a second longer de-boost burn is carried out for horizontal braking. The objective of the braking phase is to efficiently kill the horizontal velocity to 0 at desired altitude. The lander will then follow a vertical descent, during which periodic firing shall be done to reduce the vertical velocity and achieve 0 m/s velocity, at 4 m height where the thrust will be cut off. The final phase is the free fall from 4 m to impact point with touch down velocity < 5 m/s (Ref. 1).
The Lander module operations from separation to touch down shall be carried out by a closed loop NGC (Navigation, Guidance and Control) system. The INS (Inertial Navigation System) alone will not be able to meet the stringent touchdown requirement of < 5 m/s in vertical and horizontal velocity. The unbounded error growth in the INS with time is corrected with the help of other absolute external measurements. An integrated navigation system consisting of an INS, star tracker (2), altimeter (2), velocimeter (2) and image sensor (2) will be utilized. The initial attitude of IMU at de-boost is determined using star tracker. The accelerometer and gyro drifts are also updated before the first burn. The state vectors are established using Deep Space Network (DSN), Orbit Determination and ground uplink and transferred to the INS system.
The lander NGC will be active before the separation from orbiter itself. The INS after updating the state vector is used for the first burn. During the long coast phase also, the attitude and gyro drifts are updated using star tracker. The accelerometer bias also is updated during the long coast phase. The INS state vector is used during the second burn. During the vertical descent phase, radar altimeter is used for the height information. Doppler velocity sensor is primarily used to measure the horizontal velocity in the terminal landing phase to ensure safe landing with a touch down velocity of < 5 m/s. Vision aiding or terrain sensor using CCD camera is used to get the image of lunar surface to avoid the obstacles and re-targeting the landing surface. 8)
The Chandrayaan-2 Lander will employ a clustered configuration of four 800 N engines along with 50 N attitude control thrusters placed at the bottom of spacecraft, to decelerate the spacecraft for braking and soft landing on lunar surface. The lander-craft will be released from lunar orbit, which will further undergo various lunar bound phases like de-boosting, rough braking, precision braking, and vertical descent. The engines will be operated together in different phases to reduce spacecraft's velocity to move from 100 km North Pole to 6 km South Pole lunar altitude location. The Lander will have on board a radio altimeter, a pattern detection camera and a laser inertial reference and accelerometer package (LIRAP). The thermal protection system has been designed to maintain the temperature of lander-craft systems within the safe limits during this phase. 9)
The Proportional Flow Control Valve (PFCV) is the heart of the system which uses a movable pintle based design as a valving element, which moves in and out of the valve flow area thus closing and opening the valve in the process. This movement is controlled by a stepper motor based actuator which will provide stroke proportional to command and thereby provide smooth and continuous flow control. 10)
The Lander-Rover module with a mass of about 1250 kg will be soft landed on the specific lunar south polar site. The Lander will deploy a Lunar Rover (~ mass 20 kg) to carry out in-situ analysis. The Rover comprises of six independently driven wheels that are connected to the body of the rover using a rocker-bogie mechanism with 10 degrees of freedom (DOF). Rover chassis houses all electronics and has two cameras for generating stereo images for path planning. The deployed solar panel provides all the power during the mission. Rover is the integration of locomotion, navigation system, communication system, manipulator and science equipment. An onboard software will allow the Rover to roam the surface of the Moon in a semi-autonomous manner. ISRO will provide partial command and control instructions from the ground.
As per a memorandum of understanding signed with ISRO, IIT Kanpur has designed, developed and validated two software algorithms (a) kinematic control algorithm for the rover motion on an uneven terrain and (b) algorithms for computer vision based autonomous navigation system for mobile robots for the lunar rover mission. The vision based system would provide the 3D map of the terrain based on which the traction control algorithm would give the safest path for the rover. The path tracking control (PTC) is based on the kinematics and dynamics model of the Rover undergoing 3D motion with slips. A slip estimator for the rover would be used in the feedback for the path tracking controller. 11)
All the six wheels of the Rover are driven by DC brushless servo motors. The front and the rear wheels also have steering motors. The rover has two rocker arms connected to the rover body through a differential. Each rocker has a rear wheel connected to one end, and a bogie connected to the other end. The bogie is connected to the rocker with a free pivoting joint. The wheels are spherical in shape and this ensures that the normal force at the terrain contact passes through the wheel center to reduce the wheel torque requirement. The maximum allowable gradient that the rover can safely climb is 35’, and it can move in a terrain with a maximum of 35’ sidewise slope. 12)
The inertial navigation of the lander is carried out by LIRAP (Laser gyro based Inertial Reference Unit and Accelerometer Package). The LIRAP consists of four ILG (ISRO Laser Gyro) and four CSA (Ceramic Servo Accelerometer) sensors. This sensor provides attitude referencing for the lander after it separates from the orbiter till landing. The accelerometers provide velocity increment for the liquid engine cutoff during orbit maneuvers. It also provides inertial navigation information (position, velocity & quaternions) from lander separation to touchdown. One of the key elements essential for safe landing is the Hazard Detection and Avoidance (HDA) system. The HDA system comprises of several sensors like Orbiter High Resolution Camera (OHRC) for characterization of landing Site, Cameras for Horizontal velocity calculation, Camera for pattern matching and position estimation, Microwave and Laser altimeter, Laser Doppler velocimeter. All these sensors provide information like lander’s horizontal velocity, vertical velocity, height above moon’s surface, relative position of the lander w.r.t moon’s surface, hazard/safe zone around the landing site. The HDA system onboard the lander processes the inputs from the various sensors, compares the data collected with the information already stored in the lander and provides the required inputs to the Navigation and Guidance system in real time to correct the trajectory at the end of rough braking to enable a safe and soft landing (Ref. 5).
Chandrayaan-2 Mission Operations
India’s Chandrayaan-2 spacecraft consisting of an Orbiter module and a Lander (with Rover) module is expected to be launched on 6 September . The GSLV MKII Rocket will place the Chandrayaan-2 spacecraft in a highly elliptical EPO (Earth Parking Orbit) of 170 km x 45,475 km. The Chandrayaan-2 spacecraft’s Orbiter propulsion system raises the orbit around the Earth through a number of Earth burn maneuvers and propels the composite to a Lunar transfer trajectory. Further, the Orbiter gets captured into a Moon orbit through a precise maneuver by the propulsion system of the Orbiter. Further, maneuvers around the moon are planned such that the orbital path of the composite in the 100 km circular polar orbit will be over the landing site at the identified day (Ref. 5).
The day of launch / day and position of insertion into the Lunar Orbit will be timed so as to maximize the life of the Lander and Rover missions. This constraint will be met by proper planning of the Launch vehicle insertion parameters, orbit raising maneuvers and Lunar capture geometry with respect to Sun and Earth. The Orbital parameter of the Chandrayaan-2 spacecraft composite when around the moon will have to be precisely determined and corrections made so as to ensure that the composite is at the separation point at the pre-determined time. Once at this point, the Orbiter / Lander separation system will separate the two modules. The Chandrayaan-2 Orbiter will continue to orbit around the Moon and will perform the science over the moon.
On separation, a de-boost maneuver at 100 km altitude, causes a free fall of Lander to 18 km altitude. Powered descent to the designated landing site is initiated using a closed loop NGC (Navigation, Guidance and Control) system to ensure a precise soft landing at touchdown. The Lander, which will be travelling at 1.7 km/s at 100 km, on separation, will be de-orbited [by a Hohmann transfer] by firing its braking engines to reach a periapsis of 18 km. The Lander module will be precisely navigated as per plan with the onboard INS (Inertial Navigation System). Once at the periapsis the rough braking phase is initiated. During this powered descent phase the attitude of the Lander will be precisely controlled and the NGC system with the help of the inertial sensors will provide the closed loop feedback for the actuator systems. At the end of the rough braking phase [~7 km], the Hazard avoidance sensors will sense the position and velocity of the Lander with reference to the landing site. Based on the relative position and velocity with respect to the pre-determined landing site on the moon's surface, the further trajectory is planned on board and the sensors along with actuators will guide the Lander to a position over the landing site [~100 m]. At this point, the Lander hovers over the site and the hazard avoidance sensor will determine the safest landing point in the near vicinity and the Lander will be maneuvered to this point. At a height of 2 m, upon ensuring that the relative velocity with reference to moon surface is zero, the braking engines are cut off. The Lander freely falls to the surface and the landing leg mechanism will absorb the impact loads and ensure the integrity of the Lander for further operations. The entire operation from separation to touch down is fully autonomous and must be performed by the onboard computers in the Lander without any intervention from ground.
The onboard guidance algorithm takes current position and velocity from Navigation (at every guidance cycle) and generates steering profile in realtime by considering the end target states. The steering profile decides the magnitude of the thrust for each engine and the required attitude for the lander. The attitude controller tracks the reference attitude while ensuring closed loop stability. Inertial Navigation is prone to errors due to factors such as error in initial states, propagation errors and inherent inaccuracies. This needs to be corrected with updates from Absolute Navigation sensors. When the lander is at a height of 7 km from moon’s surface, the absolute position of the lander with respect to the landing site is determined using the Lander position detection camera. In addition, at this instance the horizontal and vertical velocity, absolute height with respect to moon’s surface are derived from the onboard instruments and provided to the closed loop NGC system for further refinement of the trajectory.
Given the absence of an atmosphere on the moon, active deceleration by thrusting utilizing a bipropellant system with four 800 N engines will be performed. Eight 50 N thrusters are used to ensure the required orientation during the entire phase of the descent. The error ellipse at separation (100 km) which is due to a composite state uncertainty, increases with time in view of the inertial navigation errors. To correct the same, at 7 km it is required to have controllability in the engine thrust and the same is obtained by providing throttlability in all the four engines. This variability in the engine thrust ensures a safe and soft landing at the identified site irrespective of the accumulated errors at the end of rough braking phase. The Lander follows the descent trajectory and after a short hovering phase at 100 m for reconfirmation of the safe landing site lands at the identified site. Once the Lander has landed on the surface, the Rover is deployed, and the Rover commences its journey on the moon surface.
Semi-autonomous navigation of the Rover is enabled by a pair of navigation cameras mounted on the Rover that are capable of taking images of the moon’s surface in front of the Rover. These images are sent to the ground control center where the Digital Elevation Model of these images is created. Based on this data, the path in which the Rover can move is decided and the same is uplinked to the Rover (via Lander). The slope that the Rover can navigate, the size of the boulder that the Rover can climb, the sinkage/ slippage are the basic inputs that are considered while planning the path for Rover movement. An inclinometer mounted on the chassis of the Rover computes the slope being navigated on the moon’s surface and the same is used for safety reasons to terminate the motion in case the safe limits are exceeded. Other similar autonomous safety parameters like motor wheel current, communication feasibility with Lander and power generation from solar panel in view of shadows are monitored to ensure safety of the Rover during mobility.
Mission Status
• December 4, 2021: India’s Chandrayaan-2 lunar orbiter maneuvered in October to avoid a close approach to NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft, a conjunction both agencies have acknowledged but have said little more about. 13)
- In a Nov. 15 statement, the Indian Space Research Organisation (ISRO) said Chandrayaan-2 performed a maneuver Oct. 18 to avoid a predicted close approach to LRO two days later. According to the statement, Chandrayaan-2 was predicted to come within three kilometers of LRO had it not maneuvered.
- According to the statement, ISRO and NASA worked together starting a week before the predicted conjunction. “Both the agencies deemed that the situation warranted a collision avoidance maneuver (CAM) to mitigate the close approach risk, and it was mutually agreed that CH2O would undergo the CAM,” ISRO said in the statement, referring to the Chandrayaan-2 orbiter as CH2O.
- The statement, though, did not explain why Chandrayaan-2 was the spacecraft selected to perform the maneuver. ISRO did not respond to questions about the maneuver submitted Nov. 27.
- The ISRO statement — overlooked by many at the time since it was issued the same day as a Russian antisatellite test in low Earth orbit that created thousands of pieces of debris — was the first time either agency discussed the potential conjunction. NASA did not issue its own statement about the close approach.
- “NASA and Indian Space Research Organisation fully coordinated the collision avoidance maneuver conducted by ISRO’s Chandrayaan-2 spacecraft Oct. 18,” NASA spokesperson Nancy Jones said in a Nov. 30 statement offered in response to questions about the conjunction submitted Nov. 19. “Such coordination between space agencies is an ongoing part of ensuring safe operation of satellites around the moon. At no time was NASA’s Lunar Reconnaissance Orbiter or Chandrayaan-2 in danger.”
- That statement is the only comment NASA provided about the close approach. NASA did not answer questions about how the agencies determined Chandrayaan-2 should be the spacecraft to maneuver, or how many times LRO has had close approaches to other spacecraft in lunar orbit.
- ISRO, in its statement, said that it regularly performs collision avoidance maneuvers for satellites in Earth orbit, but that this event “is the first time such a critically close conjunction was experienced for a space exploration mission of ISRO which necessitated an evasive maneuver.”
- Chandrayaan-2 entered lunar orbit in August 2019 and, at the time, ISRO officials said the spacecraft would have enough propellant to operate for seven and a half years. LRO, by contrast, has been in lunar orbit since 2009. In a presentation at the annual meeting of the Lunar Exploration Analysis group in August, project officials said they had enough fuel on board for at least six more years of operations.
- Collision avoidance is traditionally associated with satellites in Earth orbit, particularly low Earth orbit, but may increasingly become an issue both at the moon and Mars with more missions by more organizations. In March, NASA confirmed it was exchanging data with the China National Space Administration about the orbits of their spacecraft orbiting Mars, after some initial frustrations among those in NASA’s Mars program regarding the lack of data about the orbit of Tianwen-1, China’s first Mars orbiter, which arrived at Mars in February.
• December 24, 2020: India’s second mission to the Moon, Chandrayaan-2 was launched on 22 July 2019 from Satish Dhawan Space Center, Sriharikota. The Orbiter which was injected into a lunar orbit on 2 September 2019, carries 8 experiments to address many open questions on lunar science. All experiments have been performing well and the data received, suggests excellent capability to deliver on the pre-launch promises. In the period since launch payload teams tuned onboard systems for optimal instrument configurations, derived essential in-flight calibration data, revised / updated data processing steps / software and have started to publish early results. Today, the first set of data are being released for all users. The public release data archived at the Indian Space Science Data Center in Bylalu, near Bengaluru is prepared in the standard, globally followed Planetary Data System 4 (PDS4) format for public release. 14)
1 | Terrain Mapping Camera – 2 (TMC-2) | High resolution topographic maps and Digital Elevation Models (DEM) of the lunar surface |
2 | Orbiter High Resolution Camera (OHRC) | Highest resolution optical images ever (~30 cm) from a lunar orbiter platform. |
3 | Chandrayaan-2 Large Area Soft X-ray | Highest resolution surface composition study of Moon using X rays – generation of global elemental |
4 | Solar X-ray Monitor (XSM) | Highest time cadence and resolution solar flare spectrum for supporting CLASS and for |
5 | Imaging Infra-Red Spectrometer (IIRS) | Mapping minerals in 0.8 to 5.0 micron with a focus on extracting clear signature of surface |
6 | Dual frequency Synthetic Aperture Radar | First full polarimetric measurements of permanently shadowed regions. First L-band observation of the |
7 | Chandra’s Atmospheric Composition | Study of neutral species in the exosphere and its spatial and temporal variations. |
8 | Dual Frequency Radio Science Experiment | Lunar charged and neutral environment studies using the radio occultation technique |
- The ISSDC (Indian Space Science Data Center) is the nodal center of planetary data archive for planetary missions of ISRO. The Chandrayaan-2 data are required to be in Planetary Data System-4 (PDS4) standard and required to be peer reviewed scientifically and technically before acceptance as PDS archives and declared ready for sharing with global scientific community and general public. This activity has been completed and hence the first set of data from the Chandrayaan-2 mission are now being released for wider public use through the PRADAN portal hosted by ISSDC. Users may also visit https://www.issdc.gov.in for more information about the mission.
- ISDA (ISRO Science Data Archive) currently holds data sets acquired by Chandrayaan-2 payloads from Sept.-2019 to Feb.-2020 from seven instruments. Data sets from IIRS payload will be added to this shortly. This release has Level-0 and Level-1 basic data sets prepared using Planetary Data System (PDS) version 4 standards. Additional details are provided at the ISSDC portal https://www.issdc.gov.in and Data may be downloaded using https://pradan.issdc.gov.in.
• January 6, 2020: India has announced plans to land an unpiloted space vehicle on the moon in 2020. The plans mark a continuation of India’s drive to expand its space program. 15)
- The head of India’s Space Research Organization (ISRO), Kailasavadivoo Sivan, made the announcement on January 1.
- The planned mission, called Chandrayaan-3, aims to land an exploration vehicle on the moon's surface. Chandrayaan is the Sanskrit word for “moon vehicle.” Sivan recently told reporters that mission planning had progressed “smoothly” so far.
- "We are targeting the launch for this year, but it may spill over to next year," Sivan said. Indian sources told the French news agency AFP that officials had set November as a target launch date.
- India is seeking to become only the fourth nation to land on the moon's surface — after Russia, the United States and China. Israel made an unsuccessful attempt to land a spacecraft on the moon last April.
- India has worked to establish itself as a low-cost satellite launcher. It is seeking to become a world space power. However, the country’s space program suffered a failed moon-landing attempt last September. That mission, Chandrayaan-2, ended with the lander spacecraft crashing on the moon's surface.
- Chandrayaan-2 had aimed to land on the south pole of the moon, where no other lunar mission had gone before. The area is believed to contain water because it is largely unaffected by the high temperatures of the sun.
- Chandrayaan-3’s explorer vehicle hopes to confirm the presence of water in the form of lunar ice, which it first discovered during a mission in 2008.
- Sivan said the new unpiloted mission is expected to cost about $35 million, with additional launch costs.
- Sivan also announced that India had chosen four candidate astronauts to take part in the country's first planned piloted mission into orbit. That mission is set for late 2021 at the earliest. The four candidates are expected to start training in Russia later this month. Up to three astronauts are to take part in the flight.
- The piloted mission is one of India’s main planned projects to mark the 75th anniversary of India's independence from British rule.
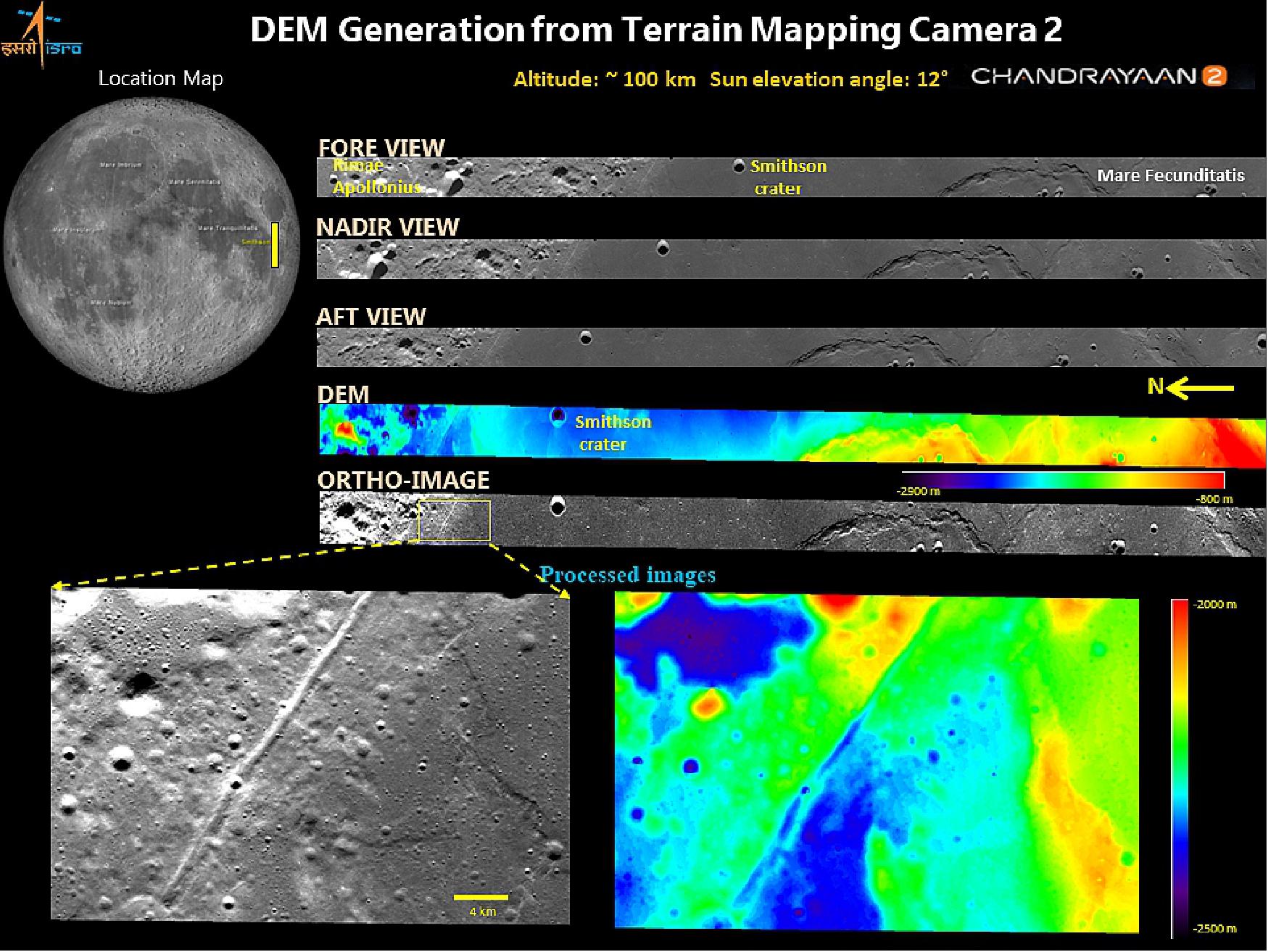
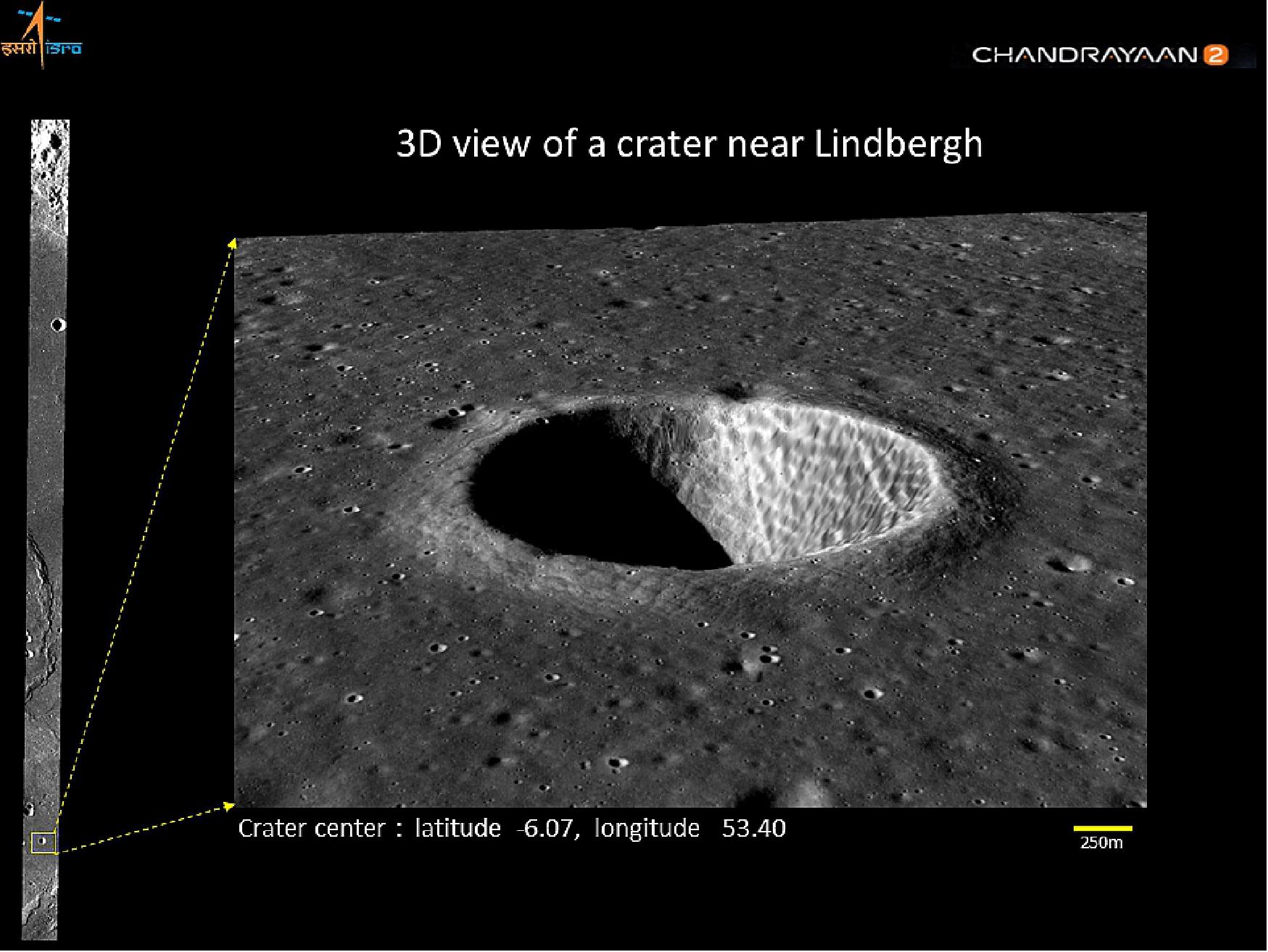
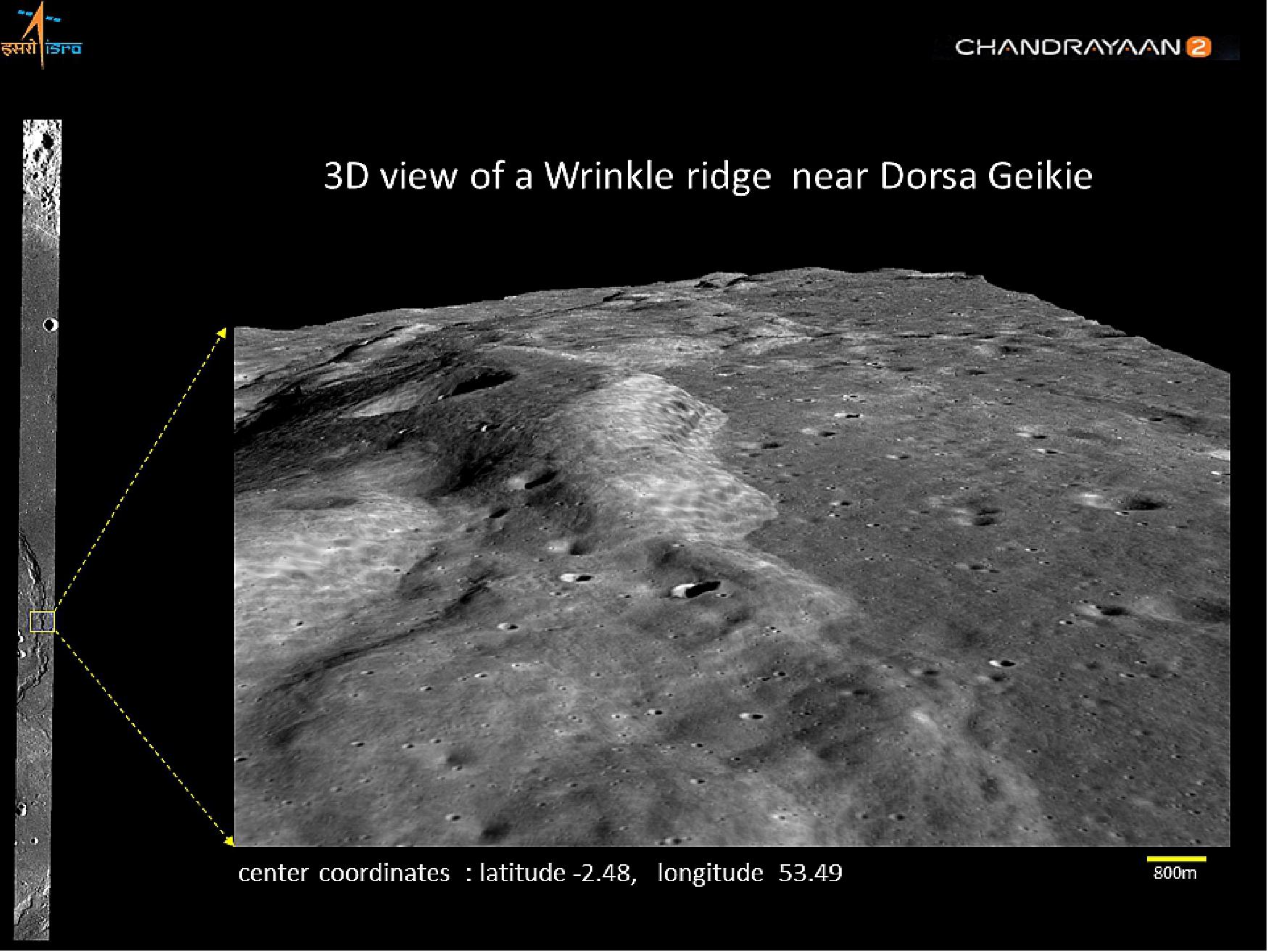
• November 13, 2019: Terrain Mapping Camera-2 (TMC-2) is a follow-on of the TMC on-board Chandrayaan-1. TMC-2 provides images (0.4 µm to 0.85 µm) at 5 m spatial resolution & stereo triplets (fore, nadir and aft views) from a 100 km orbit for preparing Digital Elevation model (DEM) of the complete lunar surface. The lander of the mission did not succeed in its planned landing on the South Pole, but the rover continues to orbit Moon with all its payloads completely functional. 16) 17)
- The triplet images from TMC-2 when processed into Digital Elevation Models, enable mapping of surface landform morphologies. These include:
a) Craters (formed by impactors)
b) Lava tubes (potential sites for future habitability)
c) Rilles (furrows formed by lava channels or collapsed lava tubes)
d) Dorsa or wrinkle ridges (formed mostly in Mare regions depicting cooling of and contraction of basaltic lava)
e) Graben structures (depicts the structural dislocations on the lunar surface)
f) Lunar Domes/ Cones (denoting localized vents of past volcanism on the Moon).
- The derived information facilitates estimation of dimensions of above features and its comparison for reconstructing the morpho-structural framework, crater characterization to derive impact geometries, surface age determination through CSFD (Crater Size –Frequency Distribution) methods, Rheological analysis based on the derived morphometric parameters, Lunar reflectance estimation etc.
• October 31, 2019: Planetary scientists prefer to call the thin gaseous envelope around the Moon as the ‘Lunar exosphere’ since it is so tenuous that the gas atoms very rarely collide with each other. While the Earth’s atmosphere near the mean sea level contains ~1019 atoms in a 1m3 of volume, the lunar exosphere contains ~ 104 to 106 atoms in 1 cm3. 18)
- Argon-40 (40Ar), which is one of the isotopes of the noble gas Argon, is an important constituent of the lunar exosphere. It originates from the radioactive disintegration of Potassium-40 (40K), which has a half-life of ~1.2 x 109 years. The radioactive 40K nuclide, which is present deep below the lunar surface, disintegrates to 40Ar, which, in turn, diffuses through the intergranular space and makes way up to the lunar exosphere through seepages and faults.
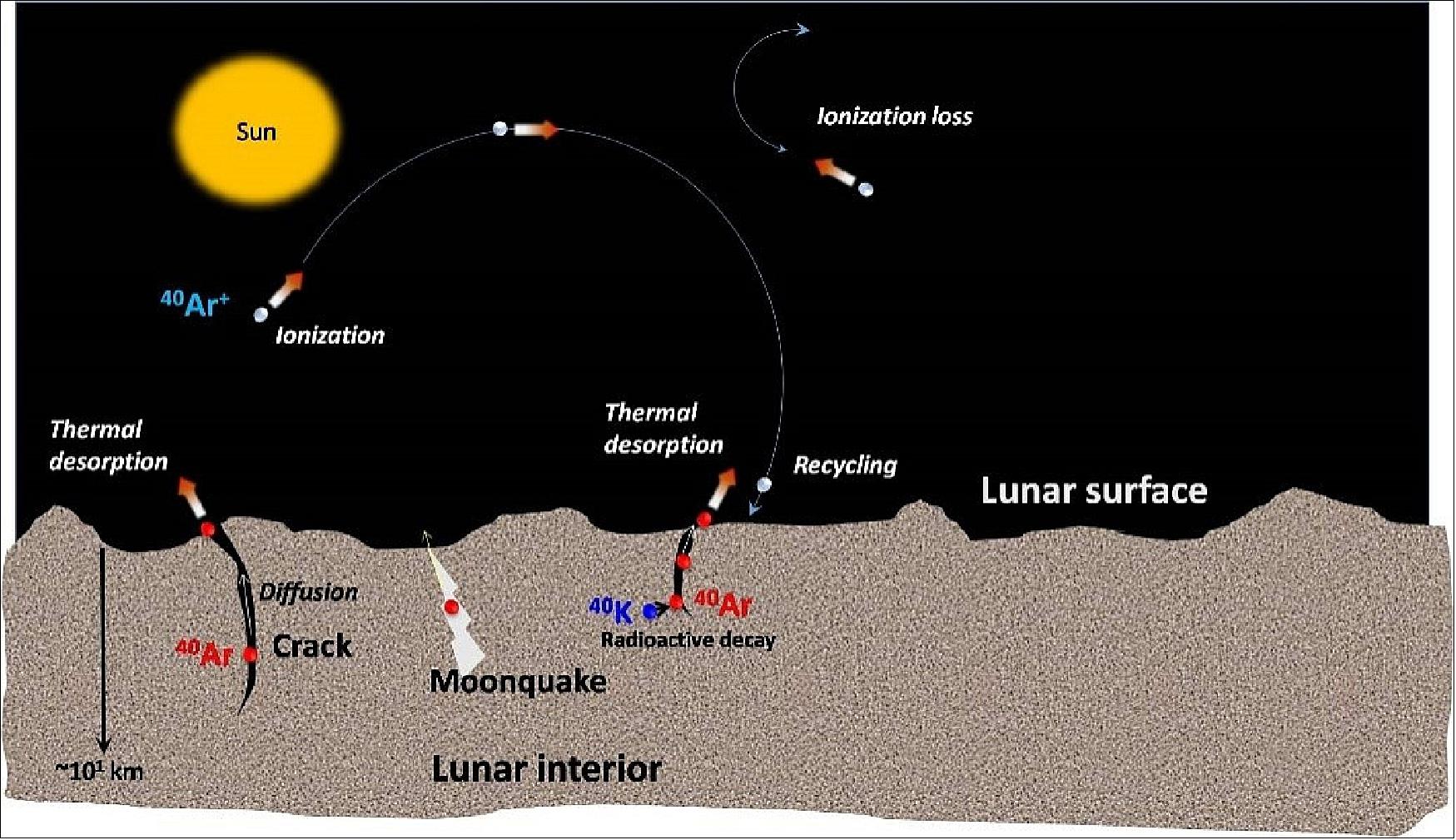
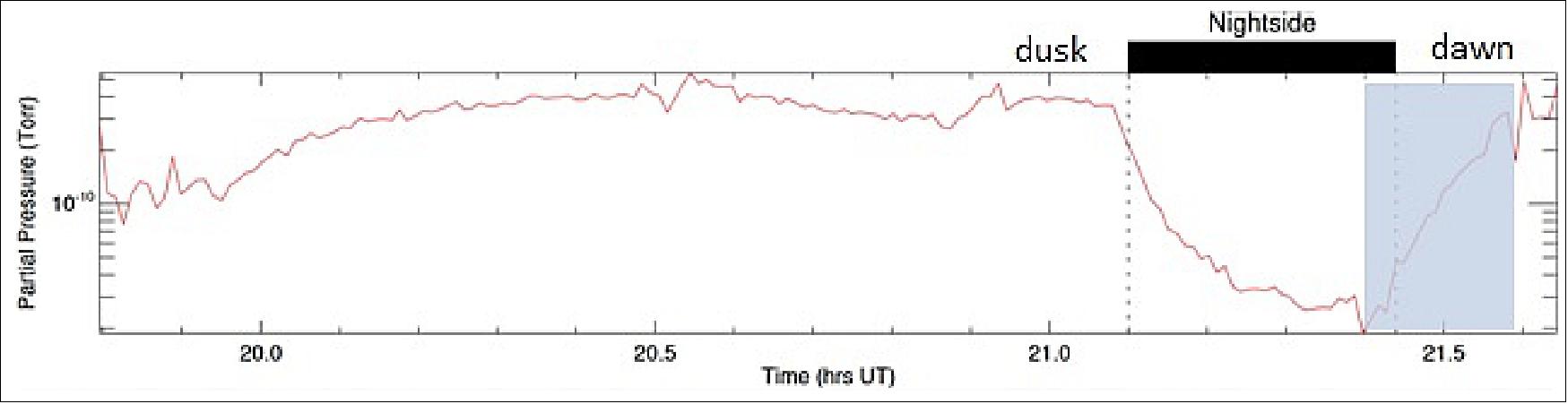
- The CHACE-2 (Chandra’s Atmospheric Composition Explorer-2) payload aboard the Chandrayaan-2 orbiter, is a neutral mass spectrometer-based payload which can detect constituents in the lunar neutral exosphere in the range of 1-300 amu (atomic mass unit). As part of its early operation, it has detected 40Ar in the lunar exosphere from an altitude of ~100 km, capturing the day-night variations of concentration. 40Ar being a condensable gas at the temperatures and pressures that prevail on the lunar surface, condenses during lunar night. After lunar dawn, the 40Ar starts getting released to the lunar exosphere (blue shaded region in Figure 12).
• October 24, 2019: Chandrayaan-2 is the second Indian lunar mission to continue the studies on the origin and evolution of the Moon. At present, the orbiter is in a 100 km polar orbit around the Moon and all science payloads are operational. Data is being analyzed by the respective payload teams and initial results have been released on the ISRO website. 19)
- Lunar science meets are organized to maximize the science outcome from this mission and to increase the user base, particularly from non-ISRO institutions such as national institutes, universities and colleges.
- Around 70 participants attended this meet, out of which 38 were faculties and research students from non-ISRO institutions (14 from IITs, 9 from national institutes and 15 were from Universities and colleges). The meeting focused on the users who presented their ideas and approach towards data analysis and the outstanding science issue which they plan to tackle using Chandrayaan-2 payload data.
- Science Principal Investigators and payload teams of Chandrayaan-2 presented the performance of payloads and provided the necessary clarifications. A Data user manual for Chandrayaan-2 Orbiter payloads has been compiled and circulated to the lunar science community.

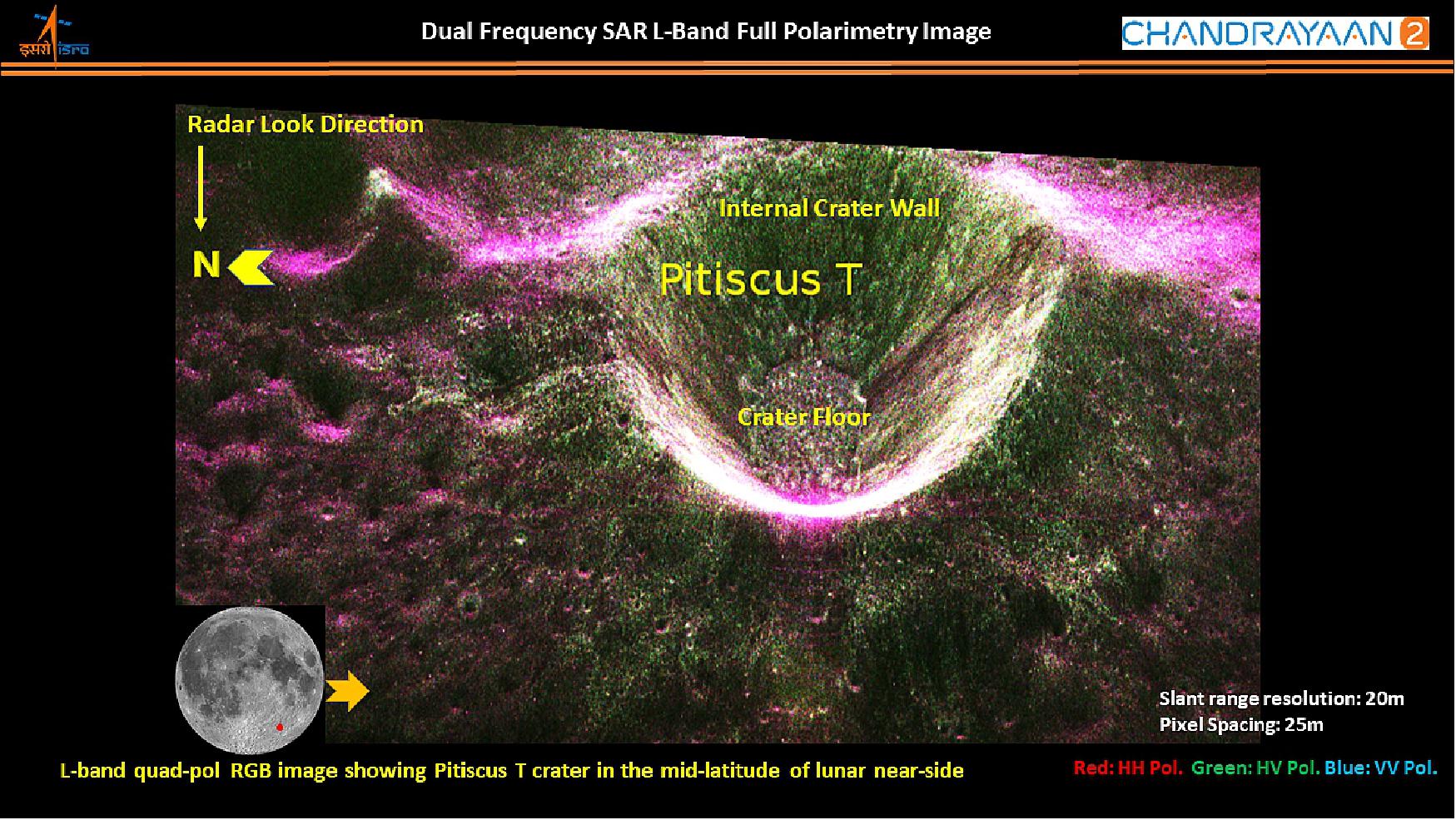
• October 22, 2019: Initial imaging and observations by Chandrayaan-2 Dual-Frequency Synthetic Aperture Radar (DF-SAR). 20)
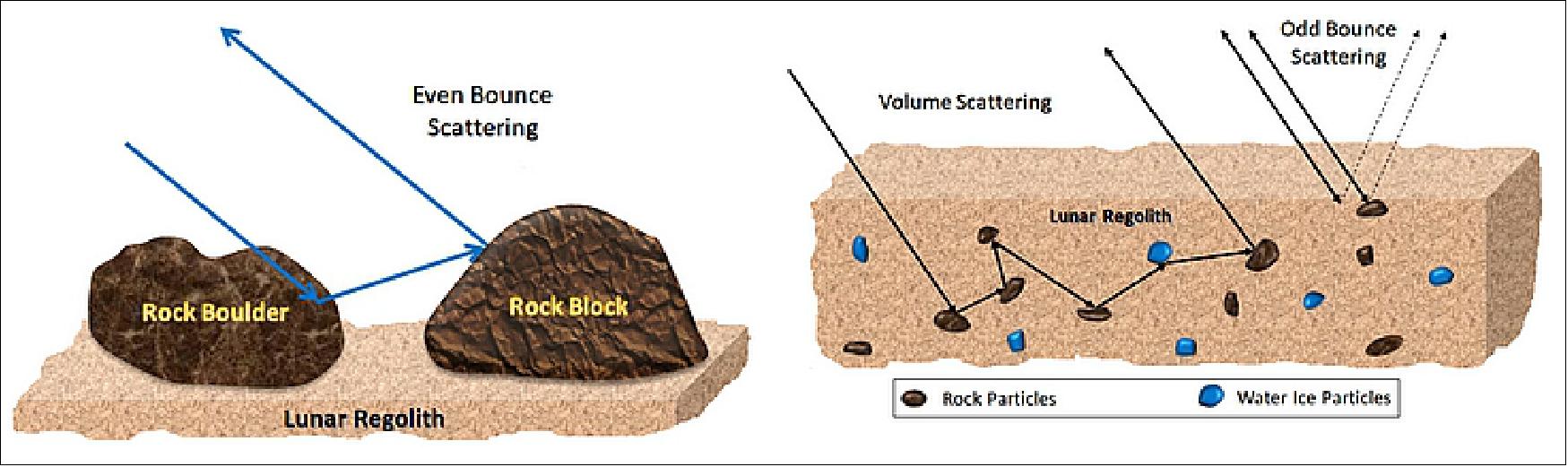
- The Moon has been continuously bombarded by meteorites, asteroids and comets since its formation. This has resulted in the formation of innumerable impact craters that form the most distinct geographic features on its surface. Impact craters are approximately circular depressions on the surface of the moon, ranging from small, simple, bowl-shaped depressions to large, complex, multi-ringed impact basins. In contrast to volcanic craters, which result from explosion or internal collapse, impact craters typically have raised rims and floors that are lower in elevation than the surrounding terrain. The study of the nature, size, distribution and composition of impact craters and associated ejecta features reveal valuable information about the origin and evolution of craters. Weathering processes result in many of the crater physical features and ejecta material get covered by layers of regolith, making some of them undetectable using optical cameras. Synthetic Aperture Radar (SAR) is a powerful remote sensing instrument for studying planetary surfaces and subsurface due to the ability of the radar signal to penetrate the surface. It is also sensitive to the roughness, structure and composition of the surface material and the buried terrain.
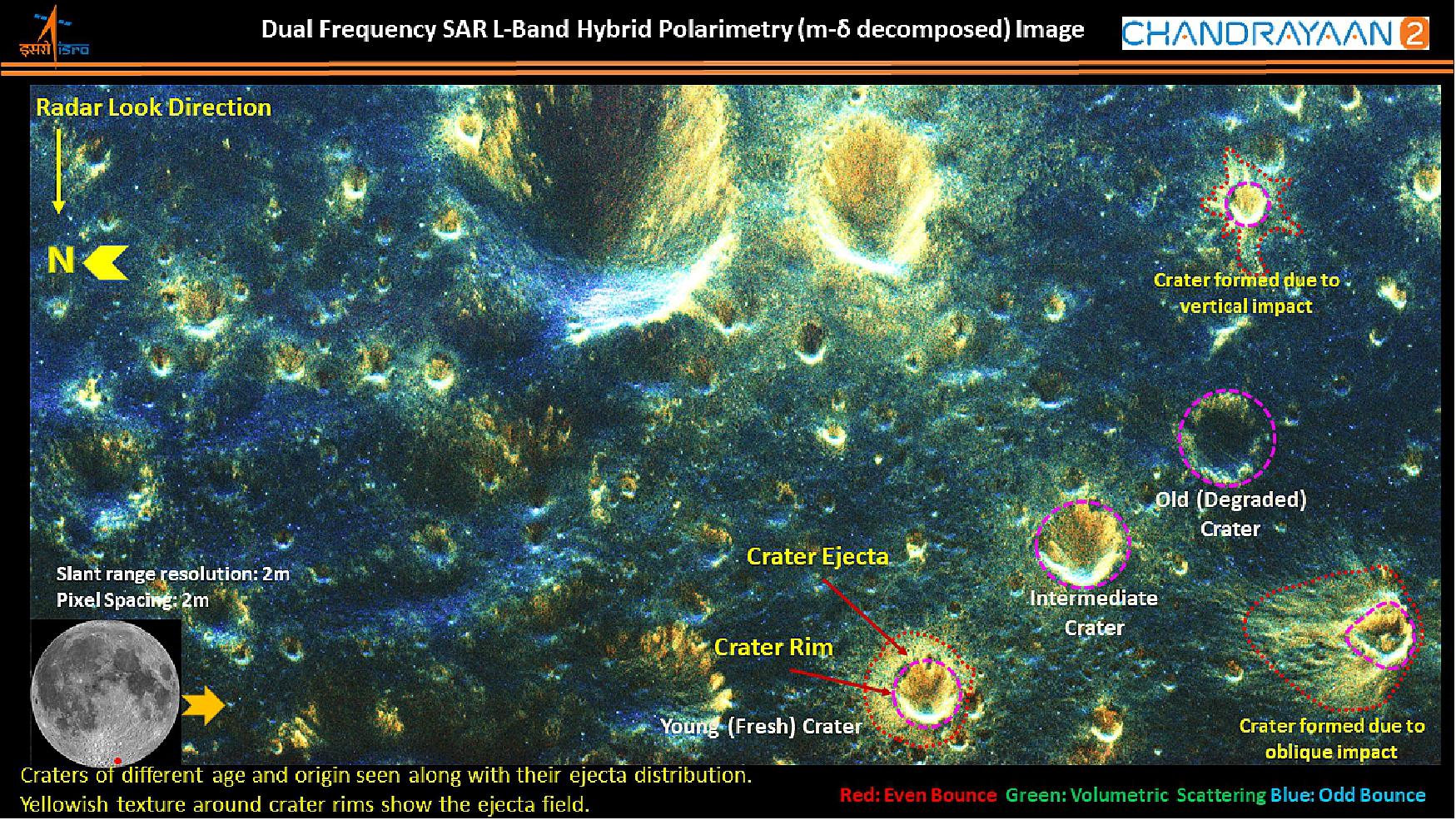
- Previous lunar-orbiting SAR systems such as the S-band hybrid-polarimetric SAR on ISRO’s Chandrayaan-1 and the S & X-band hybrid-polarimetric SAR on NASA’s LRO (Lunar Reconnaissance Orbiter) mission, provided valuable data on the scattering characterization of ejecta materials of lunar impact craters. However, L & S band SAR on Chandrayaan-2 is designed to produce greater details about the morphology and ejecta materials of impact craters due to its ability of imaging with higher resolution (2 - 75m slant range) and full-polarimetric modes in standalone as well as joint modes in S- and L-band with wide range of incidence angle coverage (9.5º - 35º). In addition, the greater depth of penetration of L-band (3-5 meters) enables probing the buried terrain at greater depths. The L & S band SAR payload helps in unambiguously identifying and quantitatively estimating the lunar polar water-ice in permanently shadowed regions.
- A convenient approach towards discerning the radar information is to prepare images using two derived parameters, ‘m’ the degree of polarization and ‘δ’ the relative phase between the transmit-receive polarized signals. These parameters are used to generate color composite images with ‘even-bounce’, ‘volume or diffused’ and ‘odd-bounce’ scatterings of a pixel represented in red (R), green(G), and blue (B) image planes, respectively. The genesis of the scattering mechanism is as illustrated in Figure 14.
- Figure 15 is one of the m- δ decomposition images from the first datasets acquired over lunar south polar regions in L-band high-resolution (2 m slant-range resolution) hybrid polarimetric mode. It is important to note that the obtained resolution is one-order better than the earlier best by a lunar-radar. This image presents many interesting facts about the secondary craters of different ages and origins in the lunar south polar region. The yellowish tone around crater rims in the image shows ejecta fields. The distribution of ejecta fields, whether uniformly distributed in all directions or oriented towards a particular side of a crater, indicates the nature of the impact. The image shows craters of vertical impact and oblique impact on the top-right and bottom-right, respectively. Similarly, the roughness of the ejecta materials associated with the impact craters indicates the degree of weathering a crater has undergone. Three similar sized craters along a row on the bottom-right of the image show examples of young crater, moderately weathered crater and an old degraded crater. Many of the ejecta fields seen in the image are not visible in high-resolution optical image over the same region, indicating the ejecta fields are buried beneath regolith layers.
• October 18, 2019: Despite the setback in India's second lunar mission - Chandrayaan-2, the rover of the satellite continues to go around the Moon with all its payloads and is completely functional. The lander failed to soft-land on the surface of the Moon and lost contact with the Earth Station of the Indian Space Research Organization (ISRO). 21)
- The Rover has now started collecting data on the lunar surface and atmosphere. The IIRS (Imaging Infrared Spectrometer) onboard the lunar probe is designed to measure the reflected sunlight and emitted portion of Moonlight from the lunar surface in narrow and contiguous spectral channels (bands) ranging from 0.8-5.0 µm.
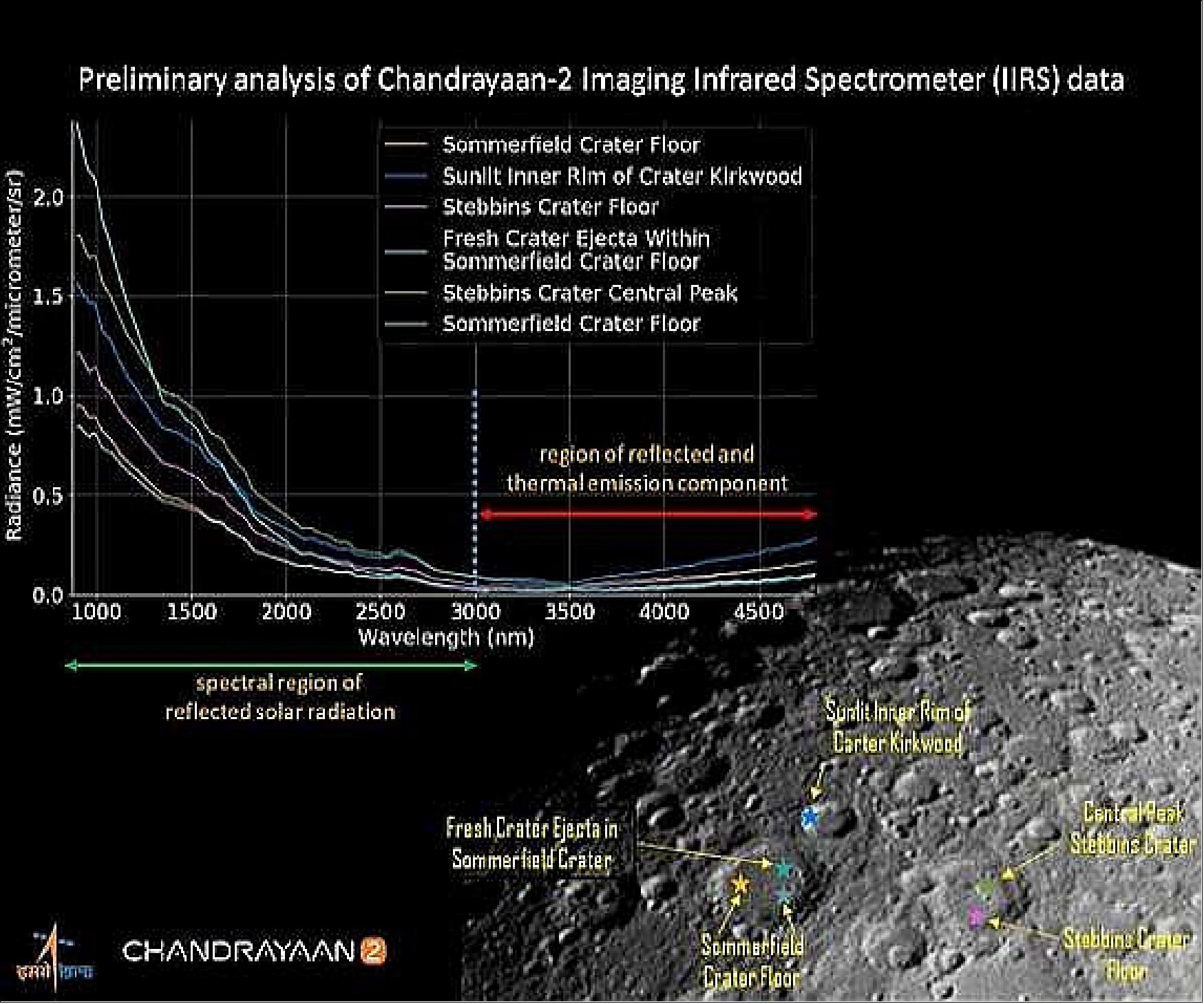
- The primary objective of IIRS is to understand the origin and evolution of the Moon in a geologic context by mapping lunar surface minerals and volatile composition using signatures in the reflected solar spectrum.
- "IIRS has now sent its first illuminated image of the lunar surface. The image covers part of the far side of the Moon in the northern hemisphere. Few prominent craters are seen in the image (Sommerfield, Stebbins and Kirkwood)," said ISRO in a statement on 17 October.
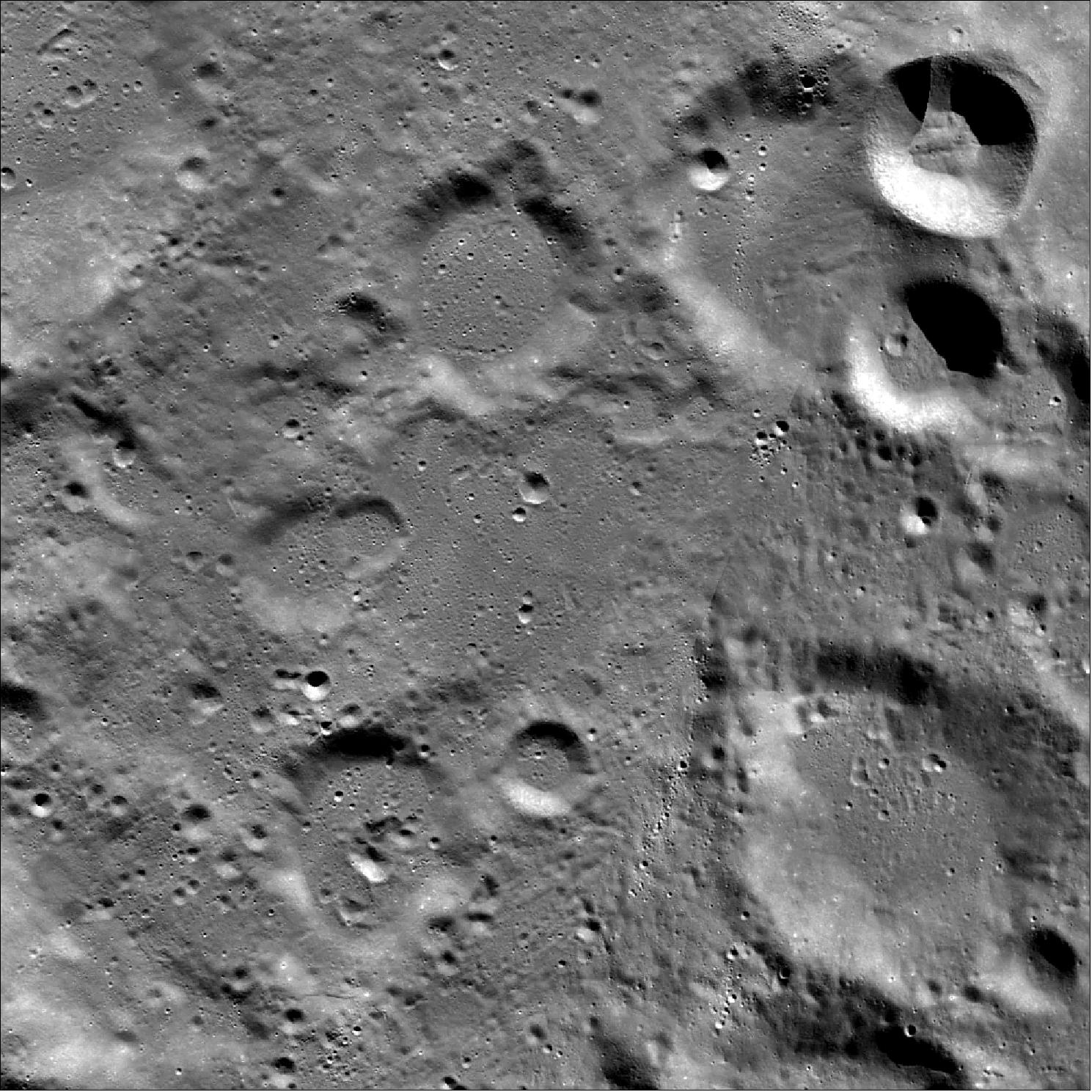
- Earlier, ISRO shared high-resolution sharpest-ever images of the Moon, taken by its high-resolution camera (OHRC) onboard the Orbiter.
- The images are an important new tool for lunar topographic studies of select regions, according to ISRO. It was obtained from a 100 km altitude and covered a part of Boguslawsky E Crater and its surroundings, which lies in the southern polar area of Moon. The Crater was named after the German Astronomer Palon H. Ludwig von Boguslawsky.
- The Orbiter's life was initially planned to last one year, but during its journey to the Moon, ISRO was able to save fuel, which made it possible to extend its life for a longer period. It is capable of communicating with the Indian Deep Space Network (IDSN) at Byalalu, near India's southern city of Bengaluru.
• September 27, 2019: NASA on Friday released high-resolution images captured by its Lunar Reconnaissance Orbiter Camera (LROC) during its flyby of the lunar region where India's ambitious Chandrayaan-2 mission attempted a soft landing near the Moon's uncharted south pole and found Vikram had a hard landing. 22)
- The module had attempted a soft landing on a small patch of lunar highland smooth plains between Simpelius N and Manzinus C craters before losing communication with ISRO on 7 September. The site was about 600 km from the south pole in a relatively ancient terrain, according to the US space agency.
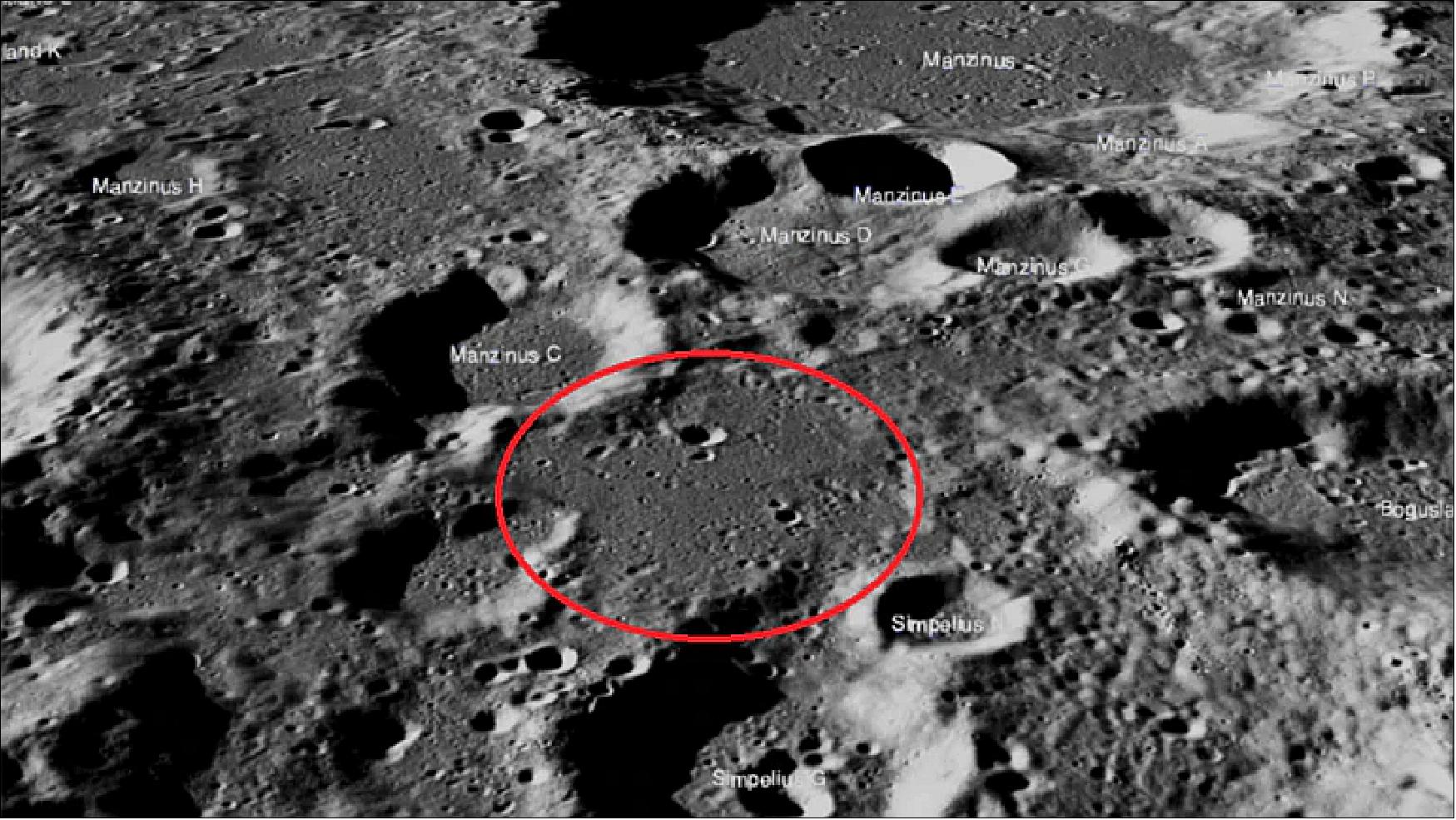
- After Vikram lost contact with ground stations, just 2.1 km above the touchdown site, the possibility of establishing contact with the lander had a deadline of 21 September, because after that the region entered into a lunar night.
- LRO will next fly over the landing site on 14 October when lighting conditions will be more favorable, according to John Keller, Deputy Project Scientist of the Lunar Reconnaissance Orbiter Mission at NASA/GSFC (Goddard Space Flight Center).
- "It was dusk when the landing area was imaged and thus large shadows covered much of the terrain; it is possible that the Vikram lander is hiding in a shadow. The lighting will be favorable when LRO passes over the site in October and once again attempts to locate and image the lander," NASA said.
• September 7, 2019: Chandrayaan-2 mission was a highly complex mission, which represented a significant technological leap compared to the previous missions of ISRO, which brought together an Orbiter, Lander and Rover to explore the unexplored south pole of the Moon. Since the launch of Chandrayaan-2 on 22 July 2019, not only India but the whole world watched its progress from one phase to the next with great expectations and excitement. This was a unique mission which aimed at studying not just one area of the Moon but all the areas combining the exosphere, the surface as well as the sub-surface of the moon in a single mission. The Orbiter has already been placed in its intended orbit around the Moon and shall enrich our understanding of the moon’s evolution and mapping of the minerals and water molecules in the Polar Regions, using its eight state-of-the-art scientific instruments. The Orbiter camera is the highest resolution camera (0.3 m) in any lunar mission so far and shall provide high resolution images which will be immensely useful to the global scientific community. The precise launch and mission management has ensured a long life of almost 7 years instead of the planned one year. The Vikram Lander followed the planned descent trajectory from its orbit of 35 km to just below 2 km above the surface. All the systems and sensors of the Lander functioned excellently until this point and proved many new technologies such as variable thrust propulsion technology used in the Lander. The success criteria was defined for each and every phase of the mission and until this date, 90 - 95% of the mission objectives have been accomplished and will continue contribute to Lunar science, notwithstanding the loss of communication with the Lander. 23)
• September 7, 2019: The Chandrayaan-2 has achieved 95% of its mission objectives, the lander's unsuccessful bid to touch-down on the Lunar surface notwithstanding. And this all thanks to the Chandrayaan-2 orbiter. 25)
Everything is Not Lost
- "Only 5 per cent of the mission has been lost - Vikram, the lander, and Pragyan, the rover. The remaining 95 per cent, that is the Chandrayaan 2 orbiter, is orbiting the moon successfully," said an ISRO official.
- Former ISRO Chairman G. Madhavan Nair noted that the orbiter is healthy and functioning normally in the Lunar orbit, and that Chandrayaan-2 had multiple objectives, including soft-landing.
- The Chandrayaan-2 spacecraft comprised three segments the Orbiter (mass of 2,379 kg, eight payloads), 'Vikram' (1,471 kg, four payloads) and 'Pragyan' (27 kg, two payloads).
- The orbiter,with a designed mission life of one year, carries eight scientific payloads for mapping the lunar surface and study the exosphere (outer atmosphere) of the Moon. The orbiter payloads will conduct remote-sensing observations from a 100 km orbit.
- According to ISRO, the lander carried three scientific payloads to conduct surface and subsurface science experiments, while the rover carried two payloads to enhance our understanding of the lunar surface.
- The Chandrayaan-2 orbiter, going around the Moon, is capable of communicating with Indian Deep Space Network (IDSN) and the mission life of the Orbiter is one year. With a mission life of one year, the Orbiter can take many pictures of the moon and send them to ISRO. The Orbiter can also take pictures of the lander to know its status, the space agency official said.

• September 7, 2019: ISRO lost contact with its unmanned spacecraft just before it was due to land on the Moon on Saturday, in a blow to the country's ambitious low-cost lunar program. 26)
- India had hoped to become just the fourth country after the United States, Russia and China to successfully land on the Moon.
- But as Prime Minister Narendra Modi looked on, the mood in mission control in the southern city of Bangalore soon deteriorated when it became clear that everything was not going according to plan.
- After several tense minutes as the expected landing time came and went, ISRO chairman Kailasavadivoo Sivan announced that communication with the lander had been lost.
- "The 'Vikram' lander descent was (going) as planned and normal performance was observed," until the craft had descended to 2.1 km above the South Pole region, Sivan said. ”Subsequently the communication from the lander to the ground station was lost. The data is being analyzed," he said, surrounded by grim-faced engineers and technicians in the control room.
- Modi told them after Sivan's announcement that "what you have done (already) is not a small achievement".
• September 5, 2019: The second de-orbiting maneuver of Chandrayaan-2 spacecraft was successfully carried out early Wednesday, according to ISRO, inching towards achieving a historic soft-landing on the lunar surface. The nine-second de-orbiting or retro-orbiting maneuver was executed at 3:42 am using the onboard propulsion system, the space agency said. 27)
- "With this maneuver, the required orbit for the Vikram Lander to commence it descent towards the surface of the Moon is achieved," ISRO said in a statement. - On Tuesday, the first de-orbiting maneuver for the spacecraft was carried out, a day after lander 'Vikram' was separated from the orbiter.
- While Chandrayaan-2 spacecraft continued to orbit the moon at a perigee of 96 km and apogee of 125 km, the Vikram Lander is at an orbit of 35 km perigee and 101 km apogee.
- "Both the Orbiter and Lander are healthy," the space agency said.
- It further said that moon lander Vikram is scheduled for a powered-descent between 1 am and 2 am on September 7, followed by a touch down of the Lander between 1:30 am and 2:30 am.
- ISRO Chairman K Sivan has said the proposed soft-landing on the Moon is going to be a "terrifying" moment as the ISRO has not done it before, whereas Lunar Orbit Insertion (LOI) maneuver was successfully carried out during the Chandrayaan-1 mission.
- Following the landing, the rover 'Pragyan' will roll out from 'Vikram' between 5:30-6:30 am on September 7, and carry out experiments on the lunar surface for a period of one lunar day, which is equal to 14 earth days.
- The mission life of the lander is also one lunar day, while the orbiter will continue its mission for a year.
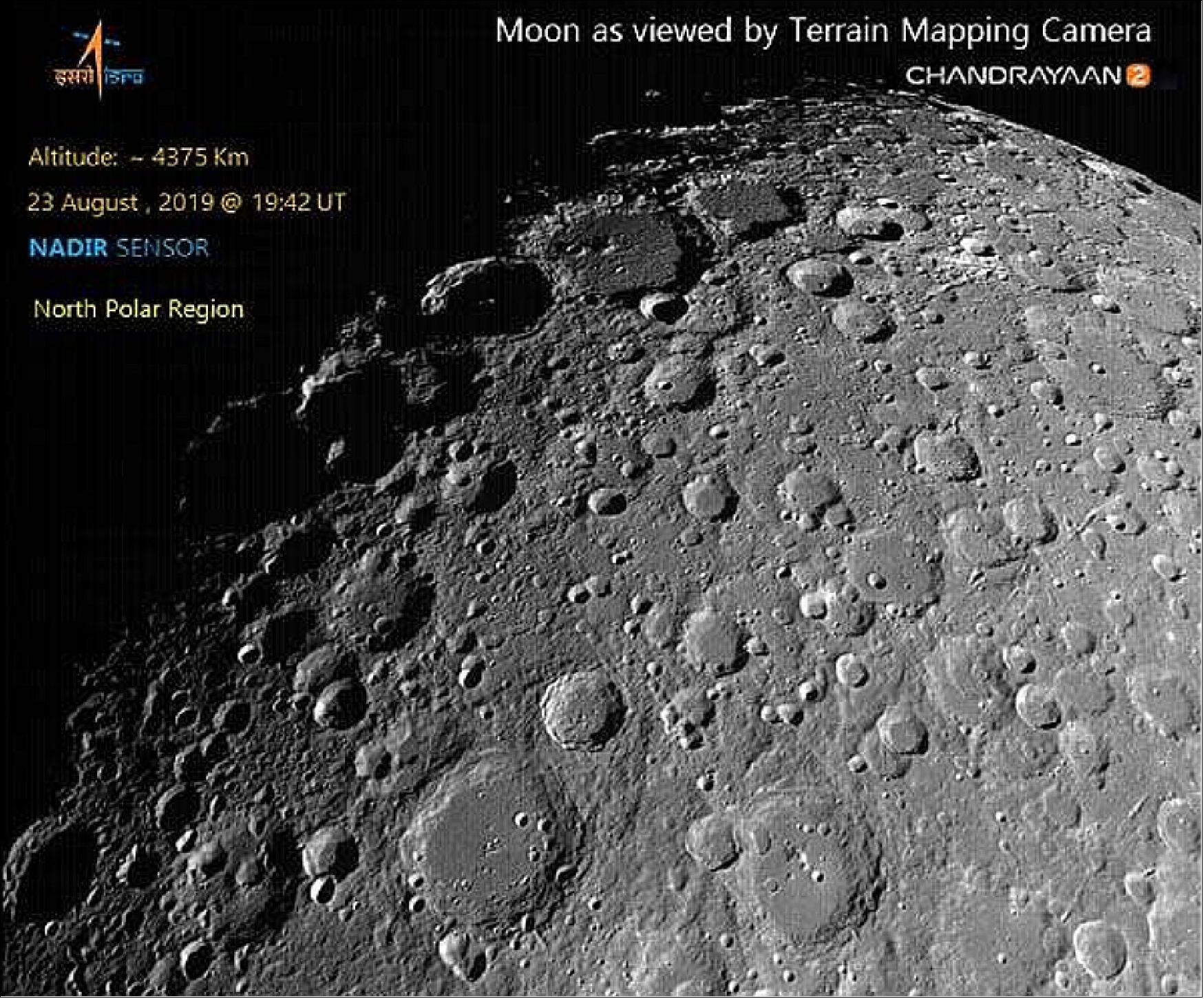
• August 27, 2019: Chandrayaan-2 has captured the first image of the Moon, two days after entering the lunar orbit. The picture was taken by Vikram, the spacecraft's lander and shows the Mare Orientale basin and Apollo craters. The image was taken at a height of about 2, 650 km from the lunar surface on August 21. 28)
- Take a look at the first Moon image captured by #Chandrayaan2 #VikramLander taken at a height of about 2650 km from Lunar surface on August 21, 2019. Mare Orientale basin and Apollo craters are identified in the picture," the Indian Space Research Organization (ISRO) tweeted on Thursday (22 August).
- ISRO chief K. Sivan announced Chandrayaan-2's successful completion of lunar orbit insertion while stating that the mission would carry out a soft landing on the Moon on 7 September. Sivan also stated that an invitation has been extended to Prime Minister Narendra Modi to witness the landing of Chandrayaan-2, however, a confirmation is awaited.
- Sivan detailed that the next major event will happen on 2 September when the lander will be separated from the orbiter.
• On 20 August 2019, India's Chandrayaan-2 spacecraft entered LOI (Lunar Orbit Insertion), executing one of the trickiest maneuvers on its historic mission to the Moon. 29)
- After four weeks in space, the craft completed its LOI as planned,ISRO (Indian Space Research Organization) said in a statement that the insertion "was completed successfully today at 09:02 IST (03:32 GMT) as planned, using the onboard propulsion system. The duration of maneuver was 1738 seconds." India is seeking to become just the fourth nation after Russia, the United States and China to land a spacecraft on the Moon.
- If the rest of the mission goes to plan, the Indian probe will land on the lunar South Pole on September 7.
- To enter the final orbit over the lunar poles, Chandrayaan-2 will undergo four more similar maneuvers, with the next scheduled for 21 August.
- ISRO chief K. Sivan said the maneuver was a key milestone for the mission, adding he was hoping for a perfect landing next month.
• August 14, 2019: The final orbit raising maneuver of Chandrayaan-2 spacecraft was successfully carried out today (August 14, 2019) at 02:21 am IST (Indian Standard Time). During this maneuver, the spacecraft's liquid engine was fired for about 1203 seconds (20 minutes). With this, Chandrayaan-2 entered the Lunar Transfer Trajectory. Earlier, the spacecraft’s orbit was progressively increased five times in the period 23 July to 06 August 2019. 30)
- The health of the spacecraft is being continuously monitored from the MOX (Mission Operations Complex) at ISRO Telemetry, Tracking and Command Network (ISTRAC) in Bengaluru with support from IDSN (Indian Deep Space Network) antennas at Byalalu, near Bengaluru. Since its launch on July 22, 2019 by GSLV MkIII-M1 vehicle, all systems onboard Chandrayaan-2 spacecraft are performing nominal.
- Chandrayaan-2 will approach Moon on August 20, 2019 and the spacecraft's liquid engine will be fired again to insert the spacecraft into a lunar orbit. Following this, there will be further four orbit maneuvers to make the spacecraft enter into its final orbit passing over the lunar poles at a distance of about 100 km from the Moon’s surface.
Maneuver | Date | Time (IST) | Orbit around the Moon (km) |
LOI/LBN#1 | August 20, 2019 | 8:30-9:30 | 118 x 18,078 |
LBN#2 (Lunar Bound Phase #2) | August 21, 2019 | 12:30 – 13:30 | 121 x 4,303 |
LBN#3 | August 28, 2019 | 05:30 – 06:30 | 178 x 1,411 |
LBN#4 | August 30, 2019 | 18:00 – 19:00 | 126 x 164 |
LBN#5 | September 01, 2019 | 18:00 – 19:00 | 114 x 128 |
- Subsequently, the Vikram lander will separate from the orbiter on September 02, 2019. Two orbit maneuvers will be performed on the lander before the initiation of powered descent to make a soft landing on the lunar surface on September 07, 2019.
• August 8, 2019: The Indian space agency on Tuesday (5 August) successfully raised Chandrayaan-2's orbit for fifth time at 3:04 pm. According to ISRO, the orbit of Chandrayaan-2 was raised to an orbit of 276 x 142,975 km by firing the spacecraft's onboard motors for 1,041 seconds.31)
- All spacecraft parameters were normal. The next maneuver is TLI (Trans Lunar Insertion), which is scheduled for August 14, 2019, between 3-4 am.
- After that, the Chandrayaan-2 is scheduled to reach the Moon by August 20 and the lander Vikram will land on the Earth's sole satellite on September 7.
• August 5, 2019: The fourth orbit raising activity for India's moon spacecraft Chandrayaan-2 was performed successfully at 3:27pm on 2 August, according to ISRO. The ISRO said the orbit of the Chandrayaan-2 was raised to 277 x 89,472 km by firing the onboard motors for 646 seconds. All spacecraft parameters are normal, it said. The fifth orbit-raising maneuver is scheduled between 2:30 to 3:30pm on August 6. The third orbit raising activity was completed on 29 July. 32)
- The ISRO said the trans-lunar insertion of Chandrayaan-2, which will send it to the moon, is scheduled on 14 August.
- After that, the Chandrayaan-2 is scheduled to reach the moon by August 20 and the lander Vikram will land on the Earth's sole satellite on 7 September.
• July 26, 2019: India's second moon spacecraft Chandrayaan-2 put into earth orbit on 22 July, is scheduled to reach the Moon by 30 August, the Indian space agency said on 25 July 2019. ISRO said that the first-earth bound orbit raising maneuver for Chandrayaan-2 was successfully performed in the afternoon on 25 July by firing the onboard motors for 57 seconds. 33)
- The new orbit is 230 x 45,163 km. The second orbit raising maneuver is scheduled for 26 July at 1.09 a.m., it added.
- On 22 July the Chandrayaan-2 was injected into an elliptical orbit of 170 x 45,475 km by India's heavy-lift rocket Geosynchronous Satellite Launch Vehicle-Mark III (GSLV Mk III) in a textbook style.
- ISRO said the major activities include earth bound maneuvers, the trans-lunar insertion, lunar-bound maneuvers, the lander's separation from Chandrayaan-2 and its touchdown on the moon's South Pole.
- Furthermore, ISRO stated that the trans-lunar insertion of Chandrayaan-2 is scheduled for 14 August, which will send the spacecraft to moon, which it will reach by 20 August. The lander Vikram will land on the moon on 7 September.
• July 22, 2019: About 16 minutes 14 seconds after lift-off, the vehicle injected the Chandrayaan-2 spacecraft into an elliptical EPO ( Earth Parking Orbit). Immediately after spacecraft separation from the vehicle, the solar array of the spacecraft automatically got deployed and ISRO Telemetry, Tracking and Command Network (ISTRAC), Bengaluru successfully took control of the spacecraft (Ref. 6).
- ISRO Chairman Dr K Sivan congratulated the launch vehicle and satellite teams involved in this challenging mission. “Today is a historical day for Space Science and Technology in India. I am extremely happy to announce that GSLV MkIII-M1 successfully injected Chandrayaan-2 into an orbit of 6000 km more than the intended orbit and is better.”
Orbiter Sensor Complement
The Chandrayaan-2 orbiter will orbit the Moon at an altitude of 100 km. The mission will carry five instruments on the orbiter. Three of them are new, while two others are improved versions of those flown on Chandrayaan-1. 34)
CLASS (Chandrayaan-2 Large Area Soft X-ray Spectrometer)
CLASS is provided by ISAC (ISRO Satellite Center), Bengaluru. The objective of CLASS is to map the abundance of the major rock forming elements on the lunar surface using the technique of X-ray fluorescence during solar flare events. CLASS is a continuation of the successful CIXS (Chandrayaan-1 Imaging X-ray Spectrometer) XRF experiment on Chandrayaan-1 (of RAL, UK). CLASS is designed to provide lunar mapping of elemental abundances with a nominal spatial resolution of 25 km (FWHM) from a 100 km polar, circular orbit of Chandrayaan-2. The science objectives of CLASS are to make global studies on the diversity and distribution of lunar lithologies, quantitative estimate of Mg abundance, essential for determining the distribution of Mg suite rocks, bulk composition of the crust, abundance patterns in the major crustal provinces and mare basalt diversity. CLASS is expected to provide global maps of major elements from Na to Fe at resolutions of a few tens of kilometers. Together with mineralogical data this would provide a comprehensive picture of lunar surface chemistry. 35)
XSM (Solar X-ray Monitor)
XSM is provided by the PRL (Physical Research Laboratory) of Ahmedabad for mapping the major elements present on the lunar surface. XSM instrument will have two packages namely, the XSM sensor package and the XSM electronics package. XSM will accurately measure spectrum of Solar X-rays in the energy range of 1–15 keV with energy resolution ~200 eV @ 5.9 keV. This will be achieved by using state-of-the-art Silicon Drift Detector (SDD), which has a unique capability of maintaining high energy resolution at very high incident count rate expected from Solar X-rays. XSM onboard Chandrayaan-2 will be the first experiment to use such detector for Solar X-ray monitoring. 36)
IIRS (Imaging IR Spectrometer)
The IIRS instrument is provided by SAC of Ahmedabad. The goal is to map the lunar surface over a wide wavelength range for the study of minerals, water molecules and hydroxyl present. Coverage in the 0.8 -5 µm spectral range for lunar mineralogy and trace signatures of hydroxyl (OH) and water (H2O) molecules in polar regions. Study of mare volcanism, variations in basaltic compositions, mantle heterogeneity at basin and local scale.
SAR (Synthetic Aperture Radar in L- and S-band)
SAR was developed at SAC (Space Applications Center), Ahmedabad for probing the first few tens of meters of the lunar surface for the presence of different constituents including water ice. SAR is expected to provide further evidence confirming the presence of water ice below the shadowed regions of the moon.
The S-band SAR will provide continuity to the Chandrayaan-1MiniSAR data, whereas the L-band is expected to provide deeper penetration of the lunar regolith. The system will have a selectable slant-range resolution from 2 m to 75 m, along with standalone (L- or S-band) and simultaneous (L- and S-band)modes of imaging. Various features of the instrument like hybrid and full-polarimetry, a wide range of imaging incidence angles (~10º to ~35º) and the high spatial resolution will greatly enhance our understanding of surface properties especially in the polar regions of the Moon. The system will also help in resolving some of the ambiguities in interpreting high values of Circular Polarization Ratio (CPR) observed in MiniSAR data. The added information from full-polarimetric data will allow greater confidence in the results derived particularly in detecting the presence (and estimating the quantity) of water–ice in the polar craters. 37)
Being a planetary mission, the L&S-band SAR for Chandrayaan-2 faced stringent limits on mass, power and data rate (15 kg, 100 W and 160 Mbit/s, respectively), irrespective of any of the planned modes of operation. This necessitated large-scale miniaturization, extensive use of on-board processing, and devices and techniques to conserve power. This paper discusses the scientific objectives which drive the requirement of a lunar SAR mission and presents the configuration of the instrument, along with a description of a number of features of the system, designed to meet the science goals with optimum resources.
CHACE-2 (Chandra’s Atmospheric Composition Explorer-2, a neutral mass spectrometer)
CHACE-2, developed at SPL (Space Physics Laboratory), Thiruvananthapuram to carry out a detailed study of the lunar exosphere. The CHACE-2 mass spectrometer aboard the Chandrayaan-2 orbiter will study the lunar exosphere from 100 km polar orbit in the range of 1 to 300 amu with 1 amu mass resolution. CHACE- 2 will cover the polar regions of the moon including the permanently shadowed regions (PSR), which are believed to be pristine enough to retain the history of the inner solar system. Taking advantage of the axial rotation of the Moon and the polar orbit of Chandrayaan-2, the CHACE-2 will be useful to study the global distribution of the lunar exosphere. It will also study the day-night variation of the lunar neutral exosphere as well as the variation during the passage through the geomagnetic tail. 38)
TMC-2 (Terrain Mapping Camera-2)
TCM-2 is provided by SAC (Space Applications Center), Ahmedabad. The objective is to prepare a three-dimensional map essential for studying the lunar mineralogy and geology.
Vikram Sensor Complement
The Chandrayaan-2 Vikram Lander will detach from the orbiter and descend to a lunar orbit of 30 km x 100 km using its 800 N liquid main engines. It will then perform a comprehensive check of all its on-board systems before attempting to land on the lunar surface.
RAMBHA (Radio Anatomy of Moon Bound Hypersensitive ionosphere and Atmosphere)
The RAMBHA instrument is provided by the SPL (Space Physics Laboratory), Thiruvananthapuram. RAMBHA is unique payload package that would provide a comprehensive exploration of the lunar plasma environment. RAMBHA consists of a suite of three experiments, a LP (Langmuir Probe) and a DFRS (Dual Frequency Radio Science) experiment to measure the density of the lunar near-surface plasma and how it changes over time. DFRS will measure the total electron content of lunar ionosphere. 39)
ChaSTE (Chandra’s Surface Thermo Physical Experiment)
ChaSTE is provided by the PRL (Physical Research Laboratory), Amehdabad. The goal of ChaSTE is to measure the vertical temperature gradient and thermal conductivity within the top 10 cm of the regolith. The experiment contains a thermal probe which will be deployed up to ~10 cm into the lunar regolith at the landing site. A harness, running from the probe, will connect the probe to the electronics placed inside the lander. An important aspect of the payload is the design of a precise and wide-range temperature measurement front-end (FE) and the selection of a custom developed Platinum RTD, PT1000 as a sensing element. 40)
ILSA (Instrument for Lunar Seismic Activity)
The ILSA instrument is provided by ISRO. The objective is to measure seismicity around the landing site.
LRA (Laser Reflector Array)
The LRA instrument is provided by NASA/GSFC for precise measurements of the Earth–Moon distance.
Rover Sensor Complement
APXS (Alpha Particle X-ray Spectroscope)
The APXS is provided by PRL (Physical Research Laboratory) of Ahmedabad. The objective is to study the elemental composition of Lunar rock and soil onboard Chandrayaan-2 rover by irradiation the lunar surface with alpha particles and X-rays using a radio-active alpha source. The working principle of APXS involves measuring the intensity of characteristic X-rays emitted from the sample due to Alpha Particle Induced X-ray Emission (PIXE) and X-ray florescence (XRF) processes using 241Am alpha source which allows the project to determine elements from Na to Br, spanning the energy range of 0.9 to 16 keV. The electronics design of the APXS experiment has been completed and shown that the developed system provides energy resolution of ~150 eV @ 5.9 keV which is comparable to an off-the-shelf SDD (Silicon Drift Detector) based X-ray spectrometers. 41)
The APXS instrument consists of two packages namely APXS sensor head and APXS backend electronics. APXS sensor head will be mounted on a robotic arm. On command, the robotic arm brings the sensor head close to the lunar surface (without touching it) and after the measurement, the sensor head is taken back to the parking position. APXS sensor head assembly contains SDD, six alpha sources and front end electronic circuits such as charge sensitive preamplifier (CSPA), shaper and filter circuits associated with the detector. Sensor head contains a circular disc which holds 6 alpha sources symmetrically around the disc and the detector at the center.
LIBS (Laser induced Breakdown Spectroscope)
LIBS was developed at LEOS (Laboratory for Electro Optic Systems), Bengaluru. The objective is to perform simultaneous multi-element determination of matter in any of its diverse forms, namely, solid, liquid or gas using an intense nanosecond pulse duration of laser beam of lunar regolith from an in-situ distance of 200 mm from the surface. The plasma emission emanating from the target surface is collected by a chromatic aberration corrected COU (Collection-Optics-Unit) and spectra are acquired using an aberration corrected concave holographic grating and linear-CCD based spectrograph. The spectrograph supports variable time delay in range of 1µs to 5 µs and integration time of 8 µs to 1ms. The LIBS instrument is realized with the mass of 1.2 kg, power consumption of <5 W and a footprint of 180 mm x 150 mm x 80 mm. 42)
Ground Segment
The Chandrayaan-2 Mission will utilize the ISRO ground segment consisting of the following four main entities: 43)
• The ISRO MOX (Mission Operations Complex) is located at Peenya campus of ISTRAC (ISRO Telemetry, Tracking and Command Network) near Bangalore in the state of Karnataka. MOX has facilities such as the Main Control Room, the Mission Analysis Room, Mission Planning and Flight Dynamics, the Mission Scheduling and Payload Scheduling Facility. Mission and spacecraft specialists along with the operations crew from ISTRAC carry out operations from the MOX.
• IDSN (Indian Deep Space Network) consisting of 11 m, 18 m and a 32 m antenna were established at the IDSN campus in Byalalu near Bangalore as part of the Chandrayaan-1 mission ground segment. The IDSN station will receive the Chandrayaan-2 spacecraft health data as well as the payload data. For the orbit raising phase, the TTC functions will be executed by ground stations of the ISTRAC network (Bangalore, Mauritius, Port Blair, Brunei, Biak, Trivandrum). The NASA/JPL DSN (Deep Space Network of Goldstone, Canberra, and Madrid) will provide deep space communication with the Chandrayaan-2 Orbiter as requisitioned.
• ISSDC (Indian Space Science Data Center) is a new facility established by ISRO for the Chandrayaan-1 and future deep space missions, as the primary data center for the payload data archives of Indian Space Science Missions. This data center, located at the IDSN (Indian Deep Space Network) campus in Bangalore, is responsible for the ingestion, archive, and dissemination of the payload data and related ancillary data for the Space Science missions. ISSDC interfaces with Mission Operations Complex (MOX) through dedicated communication links, Data reception centers, Payload designers, Payload operations centers, Principal investigators, Mission software developers and Science data users.
• POCs (Payload Operation Centers) focus on the higher levels of science data processing, planning of payload operations, performance assessment of the payload and payload calibration. These centers are co-located with the institutions/laboratories of the Instrument designers, Principal Investigators and will be processing and analyzing data from a specific payload. POCs will pull relevant payload (level 0 and level 1) and ancillary data sets from the ISSDC dissemination server and process the data to generate higher level products. These products will be archived in ISSDC after qualification.

References
1) Venkatesan Sundararajan, ”Overview and Technical Architecture of India's Chandrayaan-2 Mission to the Moon,” AIAA SciTech Forum, 8–12 January 2018, Kissimmee, Florida, 2018 AIAA Aerospace Sciences Meeting, URL: http://epizodsspace.airbase.ru/bibl/inostr-yazyki/Chandrayaan-2.pdf
2) M. Annadurai, ”Future Exploration Missions of ISRO,” UNCOPUOS 60th Session of the Committee on the Peaceful Uses of Outer Space, Vienna, Austria, June 7-16, 2017, URL: http://www.unoosa.org/documents/pdf/copuos/2017/copuos2017tech30E.pdf
3) HAL Delivers the Orbiter Craft Module Structure of Chandrayaan-2 to ISRO,” Indian Defence Review, 22 June 2015, URL: http://www.indiandefencereview.com/news/
hal-delivers-the-orbiter-craft-module-structure-of-chandrayaan-2-to-isro/
4) ”GSLV-Mk III / Chandrayaan-2 Mission,” ISRO Press Release, 1 May 2019, URL: https://web.archive.org/web/20181222125448/https://www.isro.gov.in/gslv-mk-iii-chandrayaan-2-mission
5) M. Annadurai, G. Nagesh, M. Vanitha,“Chandrayaan-2: Lunar Orbiter & Lander Mission”, 10th IAA Symposium on The Future of Space Exploration: Towards the Moon Village and Beyond, Torin, Italy, June 27-29, 2017
6) ”GSLV MkIII-M1 Successfully Launches Chandrayaan-2 spacecraft,” ISRO, 22 July 2019, URL: https://www.isro.gov.in/Press%20Release5.html
7) ”Press Release on Chandrayaan-2,” ISRO, 01 May 2019, URL: https://www.isro.gov.in/Press%20Release14.html
8) A. R. Rekha, A. Abdul Shukkoor, P. P. Mohanlal, ”Challenges in Navigation System design for Lunar Soft Landing,” ISRO Inertial Systems – Thiruvananthapuram Conference, 2011, URL: http://mohanlalpp.in/mysite/uploads/publish023.pdf
9) Abhishek Sharma, Deepak Kumar Agarwal, Jagadeesa Chandra Pisharady, S. Sunil Kumar, ”Plume Flow Field Analysis for Lander Propulsion System of Chandrayaan-2 Mission,” 68th International Astronautical Congress (IAC), Adelaide, Australia, September 2017, URL: https://iafastro.directory
/iac/proceedings/IAC-17/IAC-17/C4/3/manuscripts/IAC-17,C4,3,3,x38219.pdf
10) Chinmoy Mondal, Subrata Chakrabarti, D. Venkittaraman,A. Manimaran,”Development of a Proportional Flow Control Valve for the 800N Engine Test,” 9th National Symposium and Exhibition on Aerospace and Related Mechanisms (ARMS 2015) , At ISRO Satellite Centre, Bengaluru, India,
11) K. S. Venkatesh and Ashish Dutta, “Lunar Rover for Chandrayaan-II Lunar Mission: 3D Map Generation using Structured Light, Kinematics, and Path Planning, ” IITK Directions, Vol. 15, No. 1, 2015
12) M. Gunasekaran, R. Potluri and A. Dutta, “Path Tracking Control of a Moon Rover”, Indian Control Conference, IIT Madras, Chennai, India, 2015
13) Jeff Foust, India’s Chandrayaan-2 maneuvered to avoid close approach to NASA’s Lunar Reconnaissance Orbiter,” SpaceNews. 4 December 2021, URL: https://spacenews.com/
indias-chandrayaan-2-maneuvered-to-avoid-close-approach-to-nasas-lunar-reconnaissance-orbiter/
14) ”Chandrayaan-2 Mission : Initial data release,” ISRO, 24 December 2020, URL: https://www.isro.gov.in/CHANDRAAYAN.html
15) Bryan Lynn, ”India Announces New Plans for Moon Landing in 2020,” VOA News, 6 January 2020, URL: https://learningenglish.voanews.com/a/india-announces-new-plans-for-moon-landing-in-2020/5231015.html
16) ”Chandrayaan-2 mission latest updates,” DOS (Department of Space)/ISRO, 13 November 2019, URL: https://www.isro.gov.in/latest_updates.html
17) ”Archive of Updates from ISRO,” DOS/ISRO, URL: https://www.isro.gov.in/Archives.html#
18) ”Detection of Argon-40 in the lunar exosphere,” DOS/ISRO, 31 October 2019, URL: https://www.isro.gov.in/Detection%20of%20Argon-40.html
19) ”Chandrayaan-2 Data Users Meet held at New Delhi,” DOS/ISRO, 24 October 2019, URL: https://www.isro.gov.in/Chandrayaan.html
20) ”Chandrayaan-2 mission latest updates,” DOS/ISRO, 22 October 2019, URL: https://www.isro.gov.in/Initial%20Image.html
21) ”India's second Moon mission begins spectroscopic studies of lunar surface,” Moon Daily, 18 October 2019, URL: http://www.moondaily.com/reports/
Indias_second_Moon_mission_begins_spectroscopic_studies_of_lunar_surface_999.html
22) ”Chandrayaan-2: Vikram lander had hard landing on Moon, says Nasa, shares pics of site,” India Today, 27 September 2019, URL: https://www.indiatoday.in/science/story/
chandrayaan-2-nasa-images-vikram-lander-1603719-2019-09-27
23) ”Chandrayaan - 2 Latest Update,” ISRO, 7 September 2019, URL: https://www.isro.gov.in/Chandrayaan%20-%202%20Latest%20Update.html
24) ”Chandrayaan-2 — Engineering the future of lunar exploration,” ISRO, URL: https://www.isro.gov.in/chandrayan_spacecraft.html
25) ”Chandrayaan-2: Only 5% of mission affected by lander losing contact, orbiter is the real hero,” India Today, 7 September 2019, URL: https://www.indiatoday.in/science/story/
chandrayaan-2-vikram-lander-lose-contact-orbiter-payload-mission-1596543-2019-09-07?utm_source=rss
26) ”India loses contact with spacecraft trying to land on Moon,” Moon Daily, 7 September 2019, URL: http://www.moondaily.com/reports/
India_loses_contact_with_spacecraft_trying_to_land_on_Moon_999.html
27) ”Chandrayaan-2 Completes Second De-Orbiting Maneuver Ahead of Historic Landing: ISRO,” Moon Daily, 5 September 2019, URL: http://www.moondaily.com/reports/Chandrayaan_2_
Completes_Second_De_Orbiting_Manoeuvre_Ahead_of_Historic_Landing_ISRO_999.html
28) ”Chandrayaan-2 Captures First Image of Moon Showing Mare Orientale Basin, Apollo Craters,” Moon Daily, 27 August 2019, URL: http://www.moondaily.com/reports/Chandrayaan_2_Captures_First_
Image_of_Moon_Showing_Mare_Orientale_Basin_Apollo_Craters_999.html
29) ”India's Moon probe enters lunar orbit,” Moon Daily, 20 August 2019, URL: http://www.moondaily.com/reports/
Indias_Moon_probe_enters_lunar_orbit_999.html
30) ”Chandrayaan-2 Successfully enters Lunar Transfer Trajectory,” ISRO, 14 August 2019, URL: https://www.isro.gov.in/Press%20Release4.html
31) ”ISRO Chandrayaan-2 completes 5th orbital maneuver,” Moon Daily, 8 August 2019, URL: http://www.moondaily.com/reports/
ISRO_Chandrayaan_2_Successfully_Completes_5th_Orbital_Manoeuvre_999.html
32) ”Chandrayaan-2 orbit successfully raised for 4th time,” Moon Daily, 5 August 2019, URL: http://www.moondaily.com/reports/
Chandrayaan_2_orbit_successfully_raised_for_4th_time_999.html
33) ”Chandrayaan-2 will reach the moon by August 20, says ISRO,” Moon Daily, 26 July 2019, URL: http://www.moondaily.com/reports/
Chandrayaan_2_will_reach_the_moon_by_August_20_says_ISRO_999.html
34) ”Payloads for Chandrayaan-2 Mission Finalized,” ISRO, 30 August 2010, URL: https://web.archive.org/web/20220820184106/https://www.isro.gov.in/update/30-aug-2010/payloads-chandrayaan-2-mission-finalised
35) V. Radhakrishna, S. Narendranath, A. Tyagi, M. Bug, U. Unnikrishnan,R. Kulkarni, C. V. Sreekantha, Kumar, G. Balaji, P. S. Athiray, M. Sudhakar, R. Manoj, S. V. Chetty, M. R. Thyagaraj, C. Howe, J. Gow, and P. Sreekumar, ”The Chandrayaan-2 Large Area Soft X-ray Spectrometer (CLASS),” 42nd Lunar and Planetary Science Conference, 7-11 Mar ch 2011, Houston, TX, USA, URL: http://oro.open.ac.uk/29976/1/CLASS_2011_Lunar_Planetary_Science_Conf.pdf
36) S. V. Vadawale, M. Shanmugam, Y. B. Acharya, A. R. Patel, S. K. Goyal, B. Shah, A. K. Hait, A. Patinge, D. Subrahmanyam, ”Solar X-ray Monitor (XSM) on-board Chandrayaan-2 orbiter,” Advances in Space Research, Volume 54, Issue 10, 15 November 2014, Pages 2021-2028, https://doi.org/10.1016/j.asr.2013.06.002
37) Deepak Putrevu, Anup Das, J. G. Vachhani, Sanjay Trivedi, Tapan Misra, ”Chandrayaan-2 dual-frequency SAR: Further investigation into lunar water and regolith,” Advances in Space Research, Volume 57, Issue 2, 15 January 2016, Pages 627-646, https://doi.org/10.1016/j.asr.2015.10.029
38) 18Anil Bhardwaj, et al., “CHACE-2 mass spectrometer aboard Chandrayaan-2 orbiter to study the lunar neutral exosphere”, 19th National Space Science Symposium (NSSS-2016), Thiruvananthapuram, India, February 2016
39) G. Manju, et al., “RAMBHA Langmuir Probe (LP) Payload onboard Chandrayaan-2 Lander: Design and Development”, 19th National Space Science Symposium (NSSS-2016), Thiruvananthapuram, India, February 2016.
40) K. Durga Prasad, et al., “Front-End Electronics Development for ChaSTE Payload onboard Chandrayaan-2 Lander”, Physical Research Laboratory , Annual Report 2015-16, India, 2016.
41) M. Shanmugam, S. V. S. Murty, Y. B. Achary, S. K. Goyal, Arpit R.Patel, Bhumi Shah, A. K. Hait, Aditya Patinge, D. Subrahmanyam, “Alpha Particle X-ray Spectrometer (APXS) on-board Chandrayaan-2 rover”, Advances in Space Research, Vol. 54, Issue 10, November 2014, https://doi.org/10.1016/j.asr.2013.03.011
42) A. S. Laxmiprasad,V. L. N. Sridhar Raja, Surya Menon, Adwaita Goswami, M. V. H. Rao, K. A. Lohar, ” An in situ laser induced breakdown spectroscope (LIBS) for Chandrayaan-2 rover: Ablation kinetics and emissivity estimations,” Advances in Space Research, Volume 52, Issue 2, 15 July 2013, Pages 332-341, https://doi.org/10.1016/j.asr.2013.03.021
43) G.R. Hathwar, “Indian Deep Space Network: Mars Not Too Far,” Notion Press, Chennai, India, 2016.
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top