CartoSat-2D
EO
CartoSat-2D is a remote sensing satellite from ISRO (Indian Space Research Organisation), with the purpose of regularly generating imagery for cartographic applications, environmental monitoring, disaster relief, and event monitoring. The satellite was launched in February 2017 alongside 103 secondary payloads. It is the fifth in a series of seven satellites of the CartoSat-2 series.
Quick facts
Overview
| Mission type | EO |
| Launch date | Feb 2017 |

Summary
Mission Capabilities
The imaging instrument onboard CartoSat-2D consists of a HRMX (High-Resolution Multispectral Radiometer) and a PAN (Panchromatic Camera). Both devices are pushbroom scanners, and can image within the visible and near-infrared spectrum. PAN takes panchromatic images within a smaller portion of this spectrum range, but at a higher resolution than HRMX. The two sensors can support continuous strip imaging, spot scene imaging, paint brush imaging, and use CCDs (Charged Coupled Devices) for video processing.
Performance Specifications
CartoSat-2D’s telescope has an aperture diameter of 0.7 m and a focal length of 5.6 m. The instruments have a 120 kg, consume 60 W of power and process data at 336 Mbit/s. PAN takes images between 0.50 and 0.85 µm with a spatial resolution of 0.65 m and a swath width of 9.6 km. HRMX is a four-channel radiometer that images between 0.43 and 0.90 µm with a spatial resolution of 2 m and a swath width of 10 km.
The spacecraft follows a 505 km polar sun-synchronous orbit at 97.44° inclination. Through three-axis stabilisation, it achieves an attitude knowledge of ±0.01° and a pointing accuracy of ±0.05°. This translates to a ground accuracy of 100 m. The satellites LTDN (Local Time on Descending Node) is at 9:30 hours.
Space and Hardware Components
An eight-channel GPS receiver is used for calculation of instantaneous state vectors and orbital parameters allowing GEO-referencing of acquired image data.
The Data Handling System receives 11-bit data from the CCD at 336 Mbit/s, and stores processed data in a 64 Gbit SSR (Solid State Recorder). Data is transmitted in S-band and X-band through a tTwo-way gimballed phased array antenna. S-band transmission, for Telemetry and Command up/downlink, occurs at 4 kbit/s in 2067 MHz. X-band transmission, for high-speed data downlink to ground stations, occurs at 105 Mbit/s in 8125 MHz.
Three-axis stabilisation is achieved through the use of magnetorquers, four reaction wheels, and hydrazine-fuelled reaction control thrusters.
Power is generated via a pair of solar arrays that charge two lithium ion batteries
The satellite is based on an IRS-2 bus, designed by ISRO, with a mass of 714 kg and a hexagonal structure made of CFRP (Carbon Fiber Reinforced Plastic).
CartoSat-2D is still operational as of 31 October 2022. However, mission status updates are restricted.
CartoSat-2D
Spacecraft Launch Mission Status Sensor Complement References
The CartoSat-2D of ISRO is similar to the earlier four satellites of the Cartosat-2 series. After its injection into a 505 km polar sun-synchronous orbit, the satellite will be brought to operational configuration which it will begin providing regular remote sensing services using its Panchromatic and Multispectral cameras. 1) 2)

Spacecraft
CartoSat-2D spacecraft is based on ISRO's IRS-2 bus, with a liftoff mass of 714 kg. It employs a hexagonal bus structure comprised of a CFRP (Carbon Fiber Reinforced Plastic) structure. The satellite stands approximately 2.5 meters tall and is 2.4 meters in diameter.
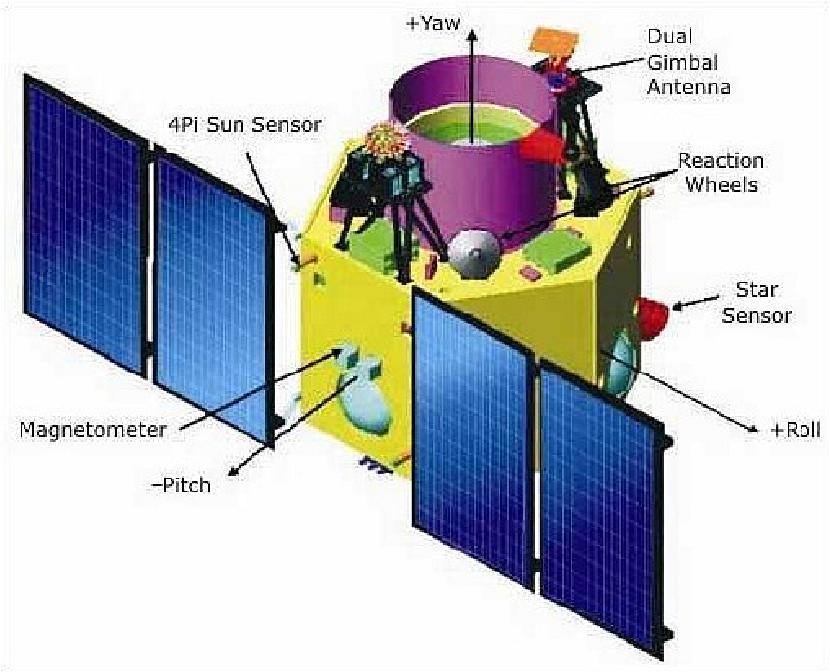
The spacecraft achieves three-axis stabilization through a combination of reaction wheels, magnetorquers and hydrazine-fuelled reaction control thrusters. Power is generated by a pair of solar arrays, charging two lithium-ion batteries. The solar arrays generate 986 W of power when in sun-pointed mode.
The four reaction wheels each have a momentum capacity of 15 Nms and a torque capability of 0.3 Nm. Eight monopropellant thrusters are installed on the spacecraft, each delivering a thrust of 1 Newton, fed from a 64 kg hydrazine supply.
Cartosat-2D uses a highly agile attitude actuation system, capable of completing imaging operations at off-nadir angles of up to 45 degrees. With this cross-track imaging capability, one satellite reaches a four-day revisit time that can be reduced to one day by means of orbital maneuvers. During typical mission operations, the satellite will face its two-panel solar arrays toward the sun for power generation unless imaging operations are taking place.
The satellite achieves an attitude knowledge of ±0.01º and a pointing accuracy of ±0.05º. This translates to a ground accuracy of 100 m, suitable for high-precision imaging of locations of interest.
The satellite is outfitted with an eight-channel GPS receiver for the calculation of instantaneous state vectors and orbital parameters. GPS is also used for GEO-referencing of acquired imaging data.
The satellite's Data Handling System receives 11-bit data from the CCD video processing unit with a data rate of 336 Mbit/s and stores processed payload data in a 64 Gbit SSR (Solid State Recorder). A two-way gimballed X-band (8125 MHz) phased array antenna is used to downlink high-speed data to ground stations. Downlink occurs after JPEG compression and encryption of the data at a 105 Mbit/s rate. Telemetry and Command up/downlink uses S-band (2067 MHz) at a data rate of 4 kbit/s.
Launch
On February 15, 2017 (3:58 UTC), ISRO (Indian Space Research Organization) launched the CartoSat-2D primary mission (714 kg) from SDSC (Satish Dhawan Space Center) on the east cost of India on the PSLV-C37 vehicle (PSLV XL configuration), along with a record number of 103 secondary payloads. 3) 4)
Orbit: Sun synchronous orbit, altitude = 505 km, inclination = 97.44º, LTDN (Local Time on Descending Node) at 9:30 hours.
Secondary Payloads
Of the 101 nanosatellites from foreign countries, 96 were from the USA, the other five were from Israel, Kazakhstan, The Netherlands, Switzerland and UAE (United Arab Emirates). The Dutch nanosatellite company ISIS (Innovative Solutions In Space), Delft, The Netherlands, provided the integration service for 101 nanosatellites on this flight. The 101 nanosatellite were packed into QuadPack deployer systems of ISIS, each holding 4 nanosatellites (Figure 3). The total launch mass was 1378 kg into a sun-synchronous orbit of 505 km altitude. 5)
• Dove (Flock-3P) nanosatellites, 88 3U CubeSats, 4.7 kg each of Planet (formerly Planet Labs), San Francisco, USA.
• Lemur 2, 8 nanosatellites (each 4.6 kg) of Spire Global Inc. of San Francisco, USA. The objective is vessel tracking using AIS (Automatic Identification System), besides carrying out weather measurements using GPS radio occultation.
• PEASS (Piezo Electric Assisted Smart Satellite Structure), a 3 kg nanosatellite of the Netherlands, built by a European consortium of partners owned by ISIS (Innovative Solutions In Space) BV.
• DIDO-2 , a 4.2 kg nanosatellite of SpacePharma, Switzerland, DIDO-2 is hosting miniature microgravity research experiments.
• BGUSat, a 4.3 kg nanosatellite of IAI (Israeli Aerospace Industries) in cooperation with Ben Gurion University. BGUSat is a technology demonstrator for nanosatellite avionics systems.
• Al-Farabi-1, a 1.7 kg nanosatellite (2U) of Al-Farabi KazNU (Kazakh National University). Al-Farabi-1 is a technology demonstration mission to test out a communications system.
• Nayif-1, a 1.1 kg 1U CubeSat of MBRSC (Mohammed Bin Rashid Space Center), Dubai, UAE (United Arab Emirates). Nayif-1 carries an amateur radio transponder.
PSLV-C37 carries also two ISRO nanosatellites, INS-1A (ISRO Nanosatellite-1A) and INS-1B. INS is a versatile and modular nanosatellite bus system envisioned for future science and experimental payloads. The INS system is developed as a co-passenger satellite to accompany bigger satellites on PSLV. The primary objectives of INS are to:
- Design and develop a low cost modular nanosatellite in the mass range of 10 kg, capable of carrying payloads up to a mass of 5 kg.
- Provide an opportunity for ISRO technology demonstration payloads.
- Provide a standard bus for launch on demand.
- Provide an opportunity to carry innovative payloads for universities and research labs.
• INS-1A has a mass of 8.4 kg and a size of 304 x 246 x 364 mm3 (stowed) and 304 x 670 x 364 mm3 (deployed).
- Payload 1: SBR (Surface Bidirectional Reflection Distribution Function Radiometer) of ISRO SAC (Space Application Center), Ahmedabad.
- Payload 2: SEUM (Single Event Upset Monitor) of SAC, implemented with COTS (Commercial of the Shelf) components.
• INS-1B has a mass of 9.7 kg and a size of 304 x 246 x 510 mm3 (stowed) and 304 x 670 x 510 mm3 (deployed).
- Payload 1: EELA (Earth Exosphere Lyman-alpha Analyzer)of LEOS (Laboratory for Electrooptics Systems), Bengaluru. The instrument registers terrestrial exospheric line-of-sight neutral atomic hydrogen Lyman-alpha flux. In addition, it will estimate the interplanetary Lyman-alpha background flux by means of deep space observations.
- Payload 2: Origami camera of SAC, a remote sensing camera with a novel lens assembly for optical realization in a small package. There are plans for its future scalability and utilization in regular satellites.

Orbit: Sun-synchronous orbit, altitude of 505 km, inclination = 9744º.
- Less than a minute after reaching orbit, the fourth stage released the CartoSat-2D environmental satellite — the mission's primary payload — about 17.5 minutes into the mission. Ten seconds later, two experimental Indian nanosatellites separated to test new types of sensors to observe Earth's surface, atmosphere and the conditions in the harsh environment of space.
- Then came a carefully-choreographed deployment sequence for the remaining 101 payloads stowed inside 25 Dutch-built "QuadPacks" for the ride into orbit.
- The QuadPacks opened two at a time to eject their CubeSat passengers. Most of the CubeSats separated while the PSLV was flying over a remote stretch of the Indian Ocean between ground stations in Mauritius and Antarctica. Once the PSLV passed in range of the receiving antenna in Troll, Antarctica, launch controllers at the Satish Dhawan Space Center confirmed all 104 satellites separated as planned.
- The launch of 88 Dove satellites came less than two weeks after Planet announced the acquisition of Terra Bella from Google, which has a constellation of seven higher-resolution spacecraft capable of recording high-definition video during passes over ground targets.
ISRO set a record by deploying 104 satellites in a single launch. The Dutch nanosatellite company ISISpace provided the integration service for 101 nanosatellites on this flight. The total launch mass was 1378 kg into a SSO of 505 km.
Mission Status
• The CartoSat-2D spacecraft and its payload are operational in the spring of 2017.
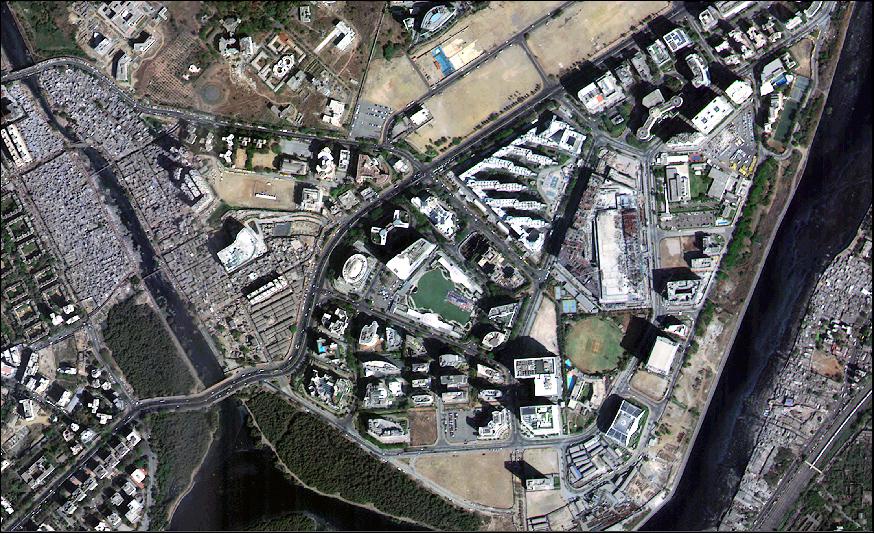
• First images from CartoSat -2 series satellite. 6)
Note: ISRO is very reluctant to provide descriptive information about the CartoSat series spacecraft and their payloads as well as to provide update information about the mission status.

Sensor Complement
Cartosat-2D is the second in the series to host a Multispectral imaging system in addition to the Panchromatic imager. The 120 kg payload is comprised of a two-mirror Ritchey-Chretien telescope with an on-axis mirror system featuring a concave primary mirror and a convex secondary mirror. The mirrors are made from Zerodur and the telescope structure consists of CFRP (Carbon-Fiber Reinforced Polymer) due to the material's excellent thermal stability, keeping the optical components in alignment. The telescope has an aperture diameter of 70 cm and a focal length of 5.6 m. 7)
In the focal plane resides a panchromatic and multispectral detection system using CCDs (Charged Coupled Devices) with 7 µm pixels. The detector system covers a spectral range of 450 to 900 nm and reaches a ground resolution of 65 cm when employing apparent velocity reduction for along-track imaging. Four MX detectors with bandpass filters between 450 and 860 nm deliver imagery at a2 m ground resolution along a 10 km swath.
The imaging payload can support continuous strip imaging, spot scene imaging and paint brush mode in which roll and pitch of the spacecraft are used to deliver strips of adjacent areas in order to broaden the instantaneous ground swath.
The main purpose of the Cartosat-2 satellite series is the generation of imagery for cartography, environmental monitoring, disaster relief and event monitoring.
PAN (Panchromatic Camera)
PAN is capable of taking panchromatic (black and white) photographs in a selected portion of the visible and near-infrared spectrum (0.50–0.85 µm) at a resolution of 65 cm.
Pushbroom, 12288 pixel/line, swath 9.6 km. Possible to be tilted along-track (10° aft- and 26° fore-) for in-orbit stereoscopy, and cross-track within a field of regard of 400 km.
HRMX (High-Resolution Multispectral Radiometer)
HRMX is a four-channel radiometer sensitive across the entire visible spectrum and part of the near-infrared spectrum (0.43–0.90 µm) at a resolution of 2 meters.
4-channel VIS/NIR radiometer: 0.43 - 0.52 µm , 0.52 - 0.61 µm, 0.61 - 0.69 µm, 0.76 - 0.90 µm
Consolidated technology, associated to a panchromatic camera (PAN)
HRMX is a pushbroom radiometer, 10 km swath, steerable within a FoR (Field of Regard) of 400 km and along-track fore- and aft-
Depending on pointing strategy. Repeat cycle for a selected local scene: one week minimum, in daylight.
The PAN/HRMX instruments have a mass of 120 kg, a power consumption of 60 W and a data rate of 336 Mbit/s.
References
1) "Cartosat -2 Series Satellite, ISRO, Feb. 15, 2017, URL: http://isro.gov.in/Spacecraft/
cartosat-2-series-satellite-0
2) "PSLV-C37 Brochure," ISRO, URL: http://isro.gov.in/pslv-c37-cartosat-2
-series-satellite/pslv-c37-brochure-0
3) "PSLV-C37/Cartosat-2 Series Satellite was successfully launched on Wednesday, February 15, 2017 at 9:28 Hrs IST from SDSC SHAR, Sriharikota," ISRO, Feb. 15, 2017, URL: http://www.isro.gov.in/launcher/
pslv-c37-cartosat-2-series-satellite
4) Stephen Clark, "India lofts a record 104 spacecraft on a single rocket, Spaceflight Now, Feb. 15, 2017, URL: https://spaceflightnow.com/2017/02/15/
india-lofts-a-record-104-spacecraft-on-a-single-rocket/
5) "PSLV-C37 / CartoSat -2 Series Satellite," ISRO, Feb. 15, 2017, URL: http://www.isro.gov.in/launcher/
pslv-c37-cartosat-2-series-satellite
6) http://isro.gov.in/pslv-c37-cartosat-2-series-
satellite/first-day-images-cartosat-2-series-satellite
7) "CartoSat-2D," Spaceflight 101, 2017, URL: http://spaceflight101.com/pslv-c37/cartosat-2d/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top