CartoSat-2A
EO
High resolution optical imagers
Land
Operational (extended)
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Operational (extended) |
| Launch date | 28 Apr 2008 |
| Measurement domain | Land |
| Measurement category | Albedo and reflectance |
| Measurement detailed | Earth surface albedo |
| Instruments | PAN (Cartosat-2A/2B) |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See CartoSat-2A summary |
CartoSat-2A
CartoSat-2A is a follow-up optical imaging mission of CartoSat-2 (launch Jan. 10, 2007), representing India's first dedicated military satellite (funding by the Ministry of Defense of the Government of India). The overall objective is to provide scene-specific spot imagery in high resolution to the Indian Armed Forces - which is in the process of establishing an Aerospace Command. 1)
Spacecraft
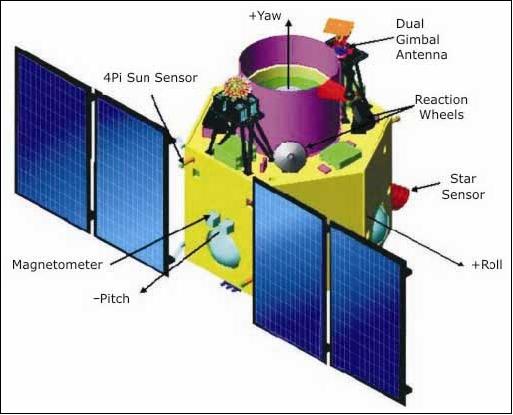
The spacecraft and its payload, built by ISRO, is practically an identical copy of the CartoSat-2 spacecraft of ISRO. It features a lightweight and compact bus structure using the BMU (Bus Management Unit) for integrated bus functions (of the AOCS, TT&C, etc.). The spacecraft is 3-axis stabilized using high torque reaction wheels, magnetic torquers, and hydrazine thrusters. Attitude sensing is provided by a high performance star sensor and by an improved IRU (Inertial Reference Unit). The satellite is very agile providing a body-pointing capability in along-track and cross-track of up to ±45º (this supports a revisit capability of certain target regions within 4 days). Also use of the SPS (Satellite Positioning System), an 8-channel GPS receiver (C/A code) on-board for the provision of instantaneous state vectors (state vector using pseudo range and range rate measurements) for the spacecraft.
The fixed solar arrays (triple-junction solar cells) provide a power of 900 W when pointed toward the sun; two NiCd batteries of 18 Ah capacity are being used for ecliptic phase bridging.
CartoSat-2A has a launch mass of 690 kg and a design life of 5 years.

Launch
The launch of CartoSat-2A took place on April 28, 2008 on a PSLV launcher. The launch was conducted from the Satish Dhawan Space Centre (SDSC) SHAR, Sriharikota space station in southern India. 2)
Next to the primary payload of CartoSat-2A, the PSLV-C9 vehicle successfully launched the IMS-1 (Indian Microsatellite-1) of 83 kg and eight nanosatellites for international customers. 3) 4) Further secondary smallsat payloads on this flight were:
• CanX-2 a triple CubeSat of the University of Toronto (UTIAS/SFL, 3.5 kg), Toronto, Canada. Objective: Testing of a nano cold gas propulsion system, innovative attitude sensors and a commercial GPS receiver.
• CUTE-1.7+APD-2 CubeSat of the Tokyo Institute of Technology (TITech). Objective: Demonstration of a PDA (Personal Digital Assistant) based bus system and APD (Avalanche Photodiode).
• AAUSat-2 a CubeSat of Aalborg University, Denmark (3 kg). Objective: Detection of gammy -ray bursts, Flight testing of nano actuators and sensors for spacecraft 3-axis stabilization.
• Delfi-C3 (6.5 kg) of the Technical University of Delft, The Netherlands. Objective: Flight testing of film solar cells, wireless sun sensor and advanced transceiver.
• COMPASS-1 (3.0 kg) of the University of Applied Science, Aachen, Germany. Objective: Flight testing of a miniaturized spacecraft bus.
• SEEDS-2 (3.0 kg) of Nihon University, Japan. Objective: Demonstration of receiving spacecraft parameter data by CW (Continuous Wave) signal, FM packet downlink and sound data by a digitalker.
• NTS (Nanosatellite Tracking of COM DEV / UTIAS/SFL, Toronto, Canada. Objective: Perform a survey of the maritime VHF band at 162 MHz. The payload is a VHF receiver.
• Rubin-8-AIS an experimental space technology mission of OHB-System, Bremen, Germany. Objective: Testing a a new spaceborne receiver and data upload system for AIS (Automatic Identification System) support.
Note: The cluster of the first six nanosatellites, (CanX-2, CUTE-1.7+APD-2, AAUSat-2, Delfi-C3, COMPASS-1 and SEEDS-2), is also referred to as NLS-4 (Nanosatellite Launch System-4). The launch of the 8 nanosatellite payloads was executed under a commercial contract between the University of Toronto, COSMOS International (a company of the OHB Fuchs Gruppe, Bremen, Germany), and the Antrix Corporation of Bangalore, India (the latter is the commercial arm of ISRO).
The launch vehicle ejected all the satellites within minutes of each other after liftoff (the entire deployment sequence last about 20 minutes). Initial signals indicated all the satellites were working normally. India is seeking to compete with other space-faring nations for commercial launch services, and this mission's success demonstrates India's ability to launch multiple payloads into precise orbit.
The XPOD (Experimental Push Out Deployer) system of UTIAS/SFL was used to deploy the following secondary payloads: CanX-2, SEEDS-2, Delfi-C3, COMPASS-1, AAUSat-2, and NTS. 5)



Orbit: Sun-synchronous circular orbit, altitude = 635 km, inclination = 97.64º, period = 97.4 minutes, local time at descending node (LTDN) = 9:30 hours. According to ISRO, CartoSat-2A will form a pair with CartoSat-2, providing more frequent revisit of a location. The twin spacecraft are being positioned in the same orbital plane phased at 180º.
CartoSat-2A will also play a major role in rural and urban infrastructure development work (the data will be used for resource management, assessment of post-disaster damage and infrastructure development). RF communications: The onboard solid-state recorder has a capacity of 64 Gbit. The imagery is downlinked in X-band (8125 MHz) at a data rate of 105 Mbit/s (after compression). The TT&C data link is in S-band (2067 MHz). Both links operate in parallel. The spacecraft is being monitored and controlled from the ISRO mission control center in Bangalore, India using the ISTRAC network of stations at Bangalore, Lucknow, Mauritius, Bearslake in Russia, Biak in Indonesia and Svalbard in Norway.
Mission Status
• The CartoSat-2A spacecraft and its payload are operating nominally in 2012. In March 2012, Space Daily is reporting: “With 11 remote sensing/earth observation satellites orbiting in the space, India is a world leader in the remote sensing data market. The 11 satellites are TES, Resourcesat 1, Cartosat- 1, -2, -2A and -2B, IMS-1, RISAT-2, OceanSat-2, ResourceSat-2, and Megha-Tropiques.” 6)
• The CartoSat-2A spacecraft is operating nominally in 2010. 7)
• An ISRO press release of April 30, 2008 stated that CartoSat-2A as well as all secondary payloads were successfully launched and deployed. The PAN camera of CartoSat-2A was switched on for the first time on April 30, 2008. The PAN camera covered strips of land from Saharanpur to Nuh (South of Delhi) and Sangli to the Goa Coast. This data was received at NRSA (National Remote Sensing Agency), Shadnagar, Hyderabad. The quality of the imagery received is considered as excellent. 8)
Sensor Complement
PAN Camera (Panchromatic Camera). The objective is to provide imagery for cartographic applications. The optical system is designed with two mirror Ritchey-Chretien on-axis obscured reflective telescope system with a concave hyperboloidal primary mirror and convex hyperboloid secondary mirrors and the field correcting relay optics. The mirrors are made of special Zerodur glass and are light-weighted to about 60% as in CartoSat-1 series. The mirrors are mounted inside the telescope cylinder made of CFRP with special MFDs (Mirror Fixation Devices) and the whole telescope assembly is mounted to the spacecraft structure through a special suspension arrangement. The optical system is designed to provide < 1 m resolution across track. The along track GSD of 0.8 m is achieved by apparent velocity reduction by a factor of 2.5. The spacecraft can be suitably biased to provide various modes of imaging:
1) Continuous strip monoscopic mode
2) Spot scene imaging (strips on either side of the ground track can be imaged)
3) Paint brush mode of imaging. This mode is used to increase the total swath. Both roll tilt and pitch tilt is employed.
The PAN Camera is a nadir-pointing pushbroom CCD instrument (detector line array of 12, 288 pixels), observing in the visible spectral range of 0.5-0.85 µm with a GSD (Ground Sample Distance) of < 1 m, and a swath width of 9.6 km at nadir.
| Instrument type | Ritchey-Chretien on-axis obscured reflective telescope system |
| Instrument mass | 120 kg (including electronics) |
| Average power consumption | 60 W |
| Instrument size | 760 mm diameter, 1600 mm in height |
| Aperture diameter of prime mirror | 700 mm |
| Focal length, F/number | 5600 mm, f/8 |
| Spectral range | 0.45-0.85 µm (panchromatic) |
| GSD (Ground Sample Distance) | 0.8 m |
| Detector | 12,288 element CCD line array |
| Swath width | 9.6 km |
| Data quantization | 10 bit |
| Source data rate | 336 Mbit/s |

References
1) Marappa Krishnaswamy, “CartoSat-2 - A Dedicated Satellite for Cartographic Application,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B1.2.10
2) “PSLV-C9 Mission,” ISRO Newsletter, Aril-Sept. 2008, URL: http://www.isro.org/newsletters/scripts/newslettersin.aspx?page4AS88
3) “PSLV Launches Ten Satellites,” Spacedaily, April 29, 2008, URL: http://www.space-travel.com/reports/PSLV_Launches_Ten_Satellites_999.html
4) http://www.satnews.com/cgi-bin/display_story.cgi?number=163530596
5) Freddy M. Pranajaya, “SFL Nanosatellite Missions and Launches in 2007-2009,” April 19, 2007, URL: https://web.archive.org/web/20190716172655/http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2007/Pranajaya_Freddy.pdf
6) Venkatachari Jagannathan, “India's spy satellite to be launched in April,” Space Daily, March 13, 2012, URL: http://www.spacedaily.com/reports/Indias_spy_satellite_to_be_launched_in_April_999.html
7) Paul Debashish, M. Pitchamani, S. K. Shivakumar, “Emergency Imaging Feasibility,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2032
8) “CARTOSAT-2A and IMS-1 Cameras Switched on,” ISRO press release of April 30, 2008, URL: http://www.isro.org/pressrelease/scripts/pressreleasein.aspx?Apr30_2008