CanX-4 and 5 (Canadian Advanced Nanospace eXperiment-4 & 5)
Non-EO
Mission complete
CSA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | CSA |
| Mission status | Mission complete |
| Launch date | 30 Jun 2014 |
| End of life date | 30 Jun 2014 |
CanX-4 & 5 (Canadian Advanced Nanospace eXperiment-4 & 5)
Spacecraft Launch Mission Status Payload References
CanX-4 & 5 is a dual-nanosatellite formation flying demonstration mission of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory), Toronto, Canada. The overall mission objective is to prove that satellite formation flying can be accomplished with sub-meter tracking error accuracy for low ΔV requirements. The formation flying maneuvers for this mission require the development of control algorithms for autonomous formation maintenance and reconfiguration in the presence of orbital perturbations. 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12)
The CanX program was established to develop new state-of-the-art nanosatellite technology and train graduate students through exposure to real nanosatellite missions. The CanX program follows the philosophy of low cost, rapid development and aggressive experimentation. The low cost is maintained by basing each nanosatellite around the GNB (Generic Nanosatellite Bus) developed at SFL. The GNB has a 20 cm cubic form factor with nearly 30% of its mass and volume dedicated to mission specific payloads making it ideal for rapidly developing a range of cheap, yet sophisticated, scientific and technology demonstration missions.
The UTIAS/SFL partner in the CanX-4&5 mission is the University of Calgary. Sponsor organizations are: DRDC (Defense R&D Canada) Ottawa, NSERC (Natural Sciences and Engineering Research Council) of Canada, CSA (Canadian Space Agency), OCE (Ontario Centers of Excellence), MDA (MacDonald Dettwiler and Associates Ltd) of Richmond, BC, Routes Astro Engineering of Kanata, Ontario, and Sinclair Interplanetary of Toronto.
The specific CanX-4&5 mission objectives are as follows:
1) Demonstrate the autonomous achievement and maintenance of several dual satellite formations
2) Demonstrate carrier-phase differential GPS techniques to perform relative position determination measurements with accuracies of 10 cm or less
3) Demonstrate sub-meter position control
4) Develop and validate fuel efficient formation flying algorithms
5) Demonstrate enabling technologies, such as CNAPS (Canadian Advanced Nanosatellite Propulsion System) and the S-band ISL (Intersatellite Link).
The mission will demonstrate two formation types, each at two separations—an along-track orbit (ATO) at distances of 1000 m and 500 m, and a projected circular orbit (PCO) at 100 m and 50 m. In each formation, the deputy spacecraft performs active orbit maintenance and control to achieve the desired relative motion with respect to the chief spacecraft. If desired, the spacecraft may swap roles throughout the mission, though all mission objectives are achievable with a single chief/deputy assignment. The spacecraft will maintain each formation for ten orbits with one orbit of reconfiguration maneuvers between formations. The nominal mission life is thus less than seven days once the spacecraft are fully commissioned. 13)
To maintain a satellite formation requires precise relative position determination and accurate thrusting. The total ΔV and relative position determination requirements are driven by the desired degree of precision for the satellite formation control. The CanX-4&5 thrusters are located on one face only. Therefore, attitude pointing requirements are placed on the attitude determination and control system for accurate thruster pointing. In addition, the two satellites must communicate with each other to relay position, velocity and attitude information. The intersatellite communication system must accommodate the desired relative distance of the satellites in each formation as well as the required data rates. 14)
Position control, relative position determination | 1 m, 10 cm |
Minimum relative distance, maximum relative distance | 50 m, 1000 m |
Attitude determination, attitude control | 0.5º, 1.0º |
ISL (Intersatellite Link) range, ISL data rate | 5 km, 10 kbit/s |
Total ΔV, specific impulse | 14 m/s, 35 s |
Thrust, minimum impulse bit | 5 mN, 0.1 mNs |
Spacecraft
Spacecraft produced within the CanX program are built upon the heritage of their predecessors. This modular, step-wise design approach results in progressively more reliable and sophisticated nano-spacecraft.
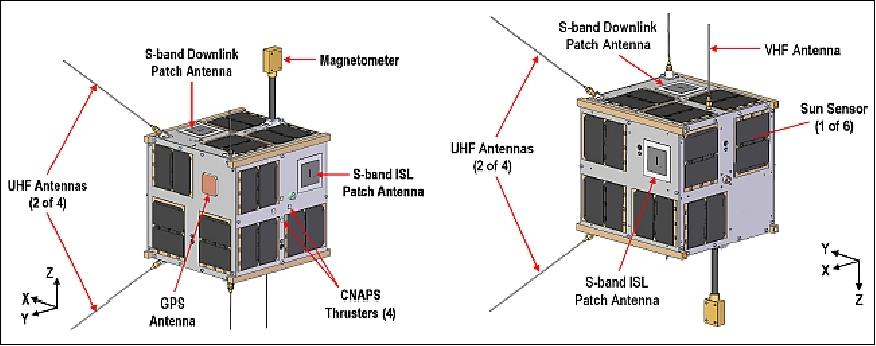
CanX-4&5 are identical nanosatellites based on the modular GNB (Generic Nanosatellite Bus) design of UTIAS/SFL (GNB is of BRITE/CanX-3 heritage). The GNB structure features a cubic form factor of 20 cm side length and consists of two trays and six external panels. A dual tray aluminum structure was selected to maximize the payload bay and provide ease of integration. The two trays contain all the necessary components for a basic satellite mission, including communications, attitude determination and control, power and thermal/structural components.
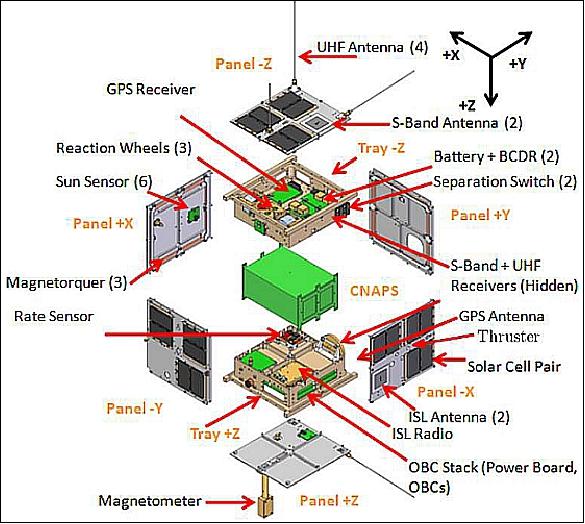
Power is generated with 36 body mounted triple junction GaInP2/GaAs/Ge solar cells with EOL efficiency of 26.8%. Energy is stored in two 5.3Ah Li-ion batteries allowing the satellite to operate in extended eclipse periods. The power system architecture is a peak power tracking system which provides switched power to the loads and power regulation where required. - A BCDR (Battery Charge and Discharge Regulator) is connected in series with each battery. The BCDRs provide the peak power tracking for the solar array while regulating the charge and discharge of the batteries. The solar array is connected to the main power bus in a DET (Direct Energy Transfer) configuration. Therefore, by regulating the main bus voltage the BCDRs can maximize the power produced by the solar array when required for optimal battery charging.
CanX-4&5 are both equipped with three on-board computers (OBC). Each OBC features an ARM7 microcontroller, 2 MB of EDAC (Error Detection And Correction) protected SRAM and 256 MB of flash memory. The housekeeping computer is responsible for communications with the ground station and collecting satellite telemetry.
The ADCS (Attitude Determination and Control Subsystem) computer interfaces with the attitude sensors and actuators and runs the attitude control algorithms. Finally, the formation flying computer will be responsible for interfacing with the propulsion system and GPS receiver and for running the formation flying algorithms. Each OBC runs a custom made multi-threaded operating system called CANOE (Canadian Advanced Nanospace Operating Environment) allowing it to divide processing time between multiple tasks in parallel.
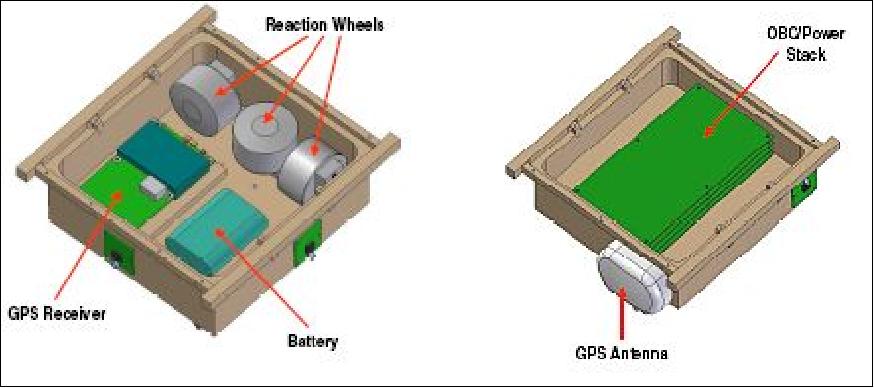
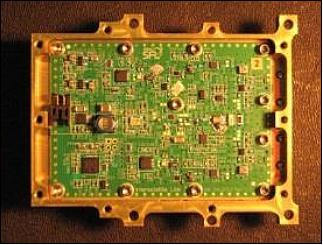
Legend to Figure 3: The left image illustrates the tray housing of the ADCS suite. The RF devices (radios) are mounted on the underside. The right image shows the tray holding the computer stack.
The ADCS is of CanX-2 and CanX-3 (BRITE) heritage providing 3-axis stabilization; the sensors consist of 6 coarse/fine sun sensors, a 3-axis magnetometer, and 3 rate gyros. The combination of these sensor sets yields a pointing accuracy of better than 1º. Attitude actuation is provided with 3 orthogonally-mounted reaction wheels (for fine pointing) and 3 magnetorquer coils (for detumbling and momentum dumping). ADCS must be able to slew each satellite such that their propulsion thrusters can deliver the correct impulse in the direction required and with an accuracy of ~1º. ADCS is being implemented on a dedicated OBC.
With thrusters located only on one side of each spacecraft, it will be necessary to slew the satellites to a new attitude vector for each successive thrust during formation flying. To ensure the same GPS satellites are kept in view, both the deputy and chief S/C will simultaneously track the same attitude targets (although only the deputy will provide the thrust).
RF communications: Three different transmission links are used on CanX-4&5: a UHF-band receiver, an S-band transmitter, and a VHF beacon.
• The UHF-band receiver is used for data uplink from the ground station and operates in the amateur band with a data rate of 4 kbit/s. It uses four quad-canted monopole antennas which provide near omni-directional coverage.
• The S-band transmitter will be used for data downlink and intersatellite communication, allowing the chief and deputy S/C to regularly exchange position, velocity, and attitude data. The S-band link provides data rates between 32 and 256 kbit/s. The S-band transmitter uses two patch antennas mounted on opposite sides of the satellite. The ISL (Intersatellite Link) S-band transceiver is carried on each S/C. An ISL data rate of 10 kbit/s can be achieved at a maximum separation distance of 5 km between the two satellites.
• The VHF beacon will continually transmit the satellites' identification and basic telemetry in Morse code during the early stages of the mission to assist in commissioning the satellites.
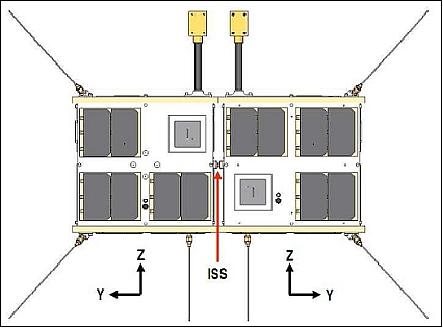
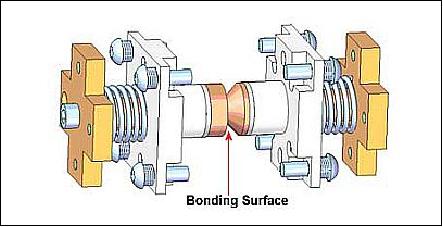
ISS (Intersatellite Separation System)
An innovative ISS was designed to facilitate the linking and subsequent separation of the two satellites during launch and commissioning phases. The ISS consists of two nearly identical halves, one mounted on the side of each satellite, with a spring-loaded cup/cone interface between them. This interface is coated in an electrically debonding agent, which, when hardened, acts as a rigid glue holding the satellites together. Once they are ready to separate, a small voltage is applied across the mechanism, which weakens the glue to the point where the springs overcome the adhesive force, breaking the bond and separating the two satellites. To ensure the de-bonding adhesive breaks as anticipated, the ISS springs will have a compressive force of 70 N and deliver a ΔV of ~ 8 cm/s to each satellite. The satellites will separate partially in the orbit normal direction in order to reduce this value to the 2.6 cm/s in the along-track direction, necessary to achieve the initial conditions for the first formation. 15)
Spacecraft mass, volume, total power | 15 kg, 20 cm x 20 cm x 20 cm, 5.4-10 W |
Bus voltage | 4.0 V (nominal, unregulated) |
Solar cells | Triple junction solar cells (face mounted) |
Battery type, capacity | Li-ion, 5.3 Ah |
Attitude control accuracy | < 1.0º |
Onboard payload data storage | Up to 256 MByte |
Launch
The CanX-4&5 nanosatellites were launched as secondary payloads on June 30, 2014 (04:22.00 UTC) on the PSLV-C23 vehicle. The launch site was the Satish Dhawan Space Centre (SDSC) SHAR, Sriharikota, India. Antrix Corporation Ltd. of Bangalore, India, was the launch provider and marketing arm of ISRO (Indian Space Research Organization). - The primary payload on this flight was SPOT-7 of Airbus Defence and Space. 16) 17) 18) 19) 20)
The secondary payloads on this flight were:
• CanX-4 and CanX-5, a pair of identical nanosatellites (15 kg each) of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory), Toronto, Canada
• AISat (Automatic Identification System Satellite), a technology demonstration nanosatellite (14 kg) of DLR (German Aerospace Center).
• VELOX-1 is a 3U CubeSat with a mass of 4.5 kg of SaRC (Satellite Research Center) at NTU (Nanyang Technological University), Singapore.
Orbit: Sun-synchronous circular orbit, altitude of ~660 km, inclination = 98.2º.


Formation Flying Mission Plan
Both CanX-4 and CanX-5 will be deployed individually from the PSLV upper stage, using separate XPOD ejection systems of UTIAS/SFL. Following commissioning of the both spacecraft, which is anticipated to take less than one month, one of the two satellites will be assigned the role of deputy, and will perform a series of drift recovery thrusts to begin maneuvering back towards the other satellite.
At a range of approximately 10 km, both satellites will be within communication range and can begin exchanging GPS and attitude information over the intersatellite link. At this point, the satellites enter a coarse station-keeping mode, in which a minimum separation is maintained in preparation for precision formation flight. Once ready, the satellites will be commanded to execute the ATO (Along Track Orbit) formations, followed by the PCO (Projected Circular Orbit) formations, with intermediate reconfiguration orbits between them. Once station-keeping has been achieved, the anticipated time required to undertake the entire mission is only days, though the drift recovery itself may require several weeks, depending on the drift rate following deployment. Both satellites are sized to recover from a worst-case separation velocity (magnitude and orientation) of 2.5 m/s.
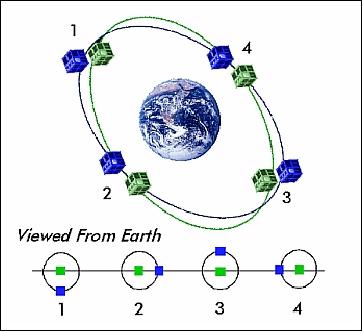
In the ATO formations, both satellites will essentially occupy the same orbit, but with one satellite leading the other by a particular separation distance. In the PCO formation, the satellites have slightly different inclination and eccentricity values so that, when viewed from Earth over the course of one orbit, the deputy appears to orbit the chief satellite (Figure 8).
Once the separation maneuver is concluded, the deputy will commence station-keeping, reconfiguring its formation after 50 orbits in each of the ATO and PCO formations. Since each reference trajectory describes either a circle or an ellipse for the deputy to track in the Hill frame, it is very important that each reconfiguration maneuver begin at an appropriate relative phase angle.
The overall ΔV requirement for the baseline CanX-4&5 mission is anticipated to be approximately 7.5m/s, well beneath the 14m/s ΔV available onboard the deputy satellite.
Experiment verification: Two criteria will be used to determine the performance of CanX-4&5 over the course of the mission. First, the level of accuracy to which the satellites are able to control their relative position in each formation configuration will be determined. Second, the ability of the deputy satellite to minimize its fuel consumption by correcting for secular perturbations in the orbit while ignoring any periodic changes will be evaluated. Each satellite will determine its absolute position and velocity using an onboard GPS receiver. This data will be logged by the satellite and downloaded by the ground station. This data can then be analyzed to accurately determine the relative distance of each satellite over time. In addition, Two-Line Elements (TLEs) obtained from NORAD will be used as a coarse means of verifying performance early in the mission.
Mission Status
• August 2018: The CanX-4 and CanX-5 mission, a dual nanosatellite mission developed at UTIAS/SFL (University of Toronto Institute for Aerospace Studies/Space Flight Laboratory), was the first nanosatellite mission to successfully demonstrate autonomous formation flight with sub-meter control error and centimeter-level relative position knowledge. The spacecraft used cold gas propulsion, an S-band intersatellite communications link, and relative navigation using carrier-phase differential GPS techniques to perform a series of precise, controlled, autonomous formations with separations from 1 km down to 50 m. 21)
- To meet launch vehicle requirements, the spacecraft were deployed separately and allowed to drift apart until one spacecraft was ready to begin orbit phasing maneuvers. Prior to the commencing of autonomous formation flying, it was required that the two satellites be brought within a few kilometers of one another. For this purpose, the DRASTK (Drift Recovery And STation Keeping) system was developed to compute fuel-efficient rendezvous trajectories and produce corresponding maneuver commands. DRASTK also provided station-keeping capabilities in the time between individual formation experiments to keep the spacecraft at a safe separation.
- The ground-based GNC system was updated that extends the capabilities of DRASTK to distributed space systems for industrial applications. This includes: generalized reconfiguration for arbitrary formation geometries; station-keeping of along-track, cross-track, and radial formation baselines; and, consideration of operational time constraints.
- CanX-4/-5 on-orbit data was used to evaluate the accuracy of the OD (Orbit Determination) technique. This technique offers a streamlined navigation solution that provides adequate precision for distributed space systems that require control bounds on the order of a kilometer along-track and meters cross-track.
- The updated GNC system provides fuel optimal maneuver solutions for fixed-time reconfiguration. A numerical optimization technique is implemented to plan guidance trajectories that reconfigure the complete ROE (Relative Orbital Element) state concurrently over a specified time, while minimizing fuel expenditure. Additionally, station-keeping emphasizes payload operations by limiting formation control to a few orbits in the control period and leveraging drift in the ROE state to maintain baselines. Precision control capabilities are enabled by the relative motion model implemented with an STM (State Transition Matrix) that captures the Keplerian dynamics and J2 perturbation effects. Additional perturbations can be included in the model through the GVE (Gauss Variational Equations) and augmented state parameters.
- Building on the success of CanX-4/-5, this GNC system enables a wide range of distributed space systems, facilitating the next generation of small satellite missions.
Note: The graduate students Nathan J. Cole, Starla R. Talbot at UTIAS/SFL received the second place award for their paper "Guidance, Navigation, and Control for Commercial and Scientific Applications of Formation Flying." The award was bestowed during the prestigious Frank J. Redd Student Competition at the 32nd Annual Small Satellite Conference in Logan, Utah. 22)
• May 22, 2018: According to Freddy Pranajaya of UTIAS/SFL, CanX-4 and CanX-5 are indeed operational, completing on June 30 their 4th year on orbit. 23)
• May 16, 2018: SFL (Space Flight Laboratory) of UTIAS (University of Toronto, Institute for Aerospace Studies) has been honored by CASI (Canadian Aeronautics and Space Institute) for the highly successful CanX-4 and CanX-5 nanosatellite precision formation flying mission — CASI presented the mission team with the 2018 Alouette Award for outstanding contribution to advancement in Canadian space technology. 24)
- CASI president Dr. Ian Fejtek bestowed the Alouette Award to members of the CanX-4/CanX-5 team: Dr. Jean-Claude Piedboeuf of the Canadian Space Agency, Dr. Brad Wallace of Defence R&D Canada, Dr. Cameron Ower of MacDonald Dettwiler & Associates, Richard Worsford of Ontario Centers of Excellence Inc., Doug Sinclair of Sinclair Interplanetary, and Dr. Robert E. Zee of SFL. Contributions to the successful mission also include control algorithms from Prof. Christopher J. Damaren of UTIAS and navigation algorithms from Profs Susan Skone and Elizabeth Cannon of the University of Calgary.
- The 7 kg CanX-4/CanX-5 nanosatellites were the first of their size and cost to achieve precise, autonomous formation flight with centimeter-level knowledge and sub-meter control accuracy in low Earth orbit. The nanosatellites flew without assistance from ground control in five planned orbital configurations with separations varying from 50 meters to one kilometer.
- In presenting the Alouette Award to the CanX-4/CanX-5 team, CASI noted that precision autonomous formation flying has practical application in sparse aperture sensing, ground target tracking, precise geolocation, and on-orbit servicing.
- CASI made the Alouette Award presentation on May 16 at a Gala Dinner during the CASI ASTRO 2018 Conference and 65th Annual General Meeting in Quebec.
• February 18, 2017: Both satellites of the CanX-4/-5 mission are operational. They have successfully completed their primary and extended missions. The satellites are currently in a safe state. UTIAS/SFL contacts them periodically to confirm their state, evaluate their orbits, and make orbital corrections if necessary. 25)
• January 26, 2016: The world's first demonstration of autonomous spacecraft maneuvering was recently completed by Silicon Valley-based DSI (Deep Space Industries) and the SFL (Space Flight Laboratory) of Toronto, Canada. Using their highly-successful CanX-4 and CanX-5 pair of nanosatellites, SFL operators executed a DSI-defined experiment on-orbit, in which the world's first spacecraft-to-spacecraft orbit maneuver was commanded by one satellite and executed by the other. 26)
- In this experiment, one of the two spacecraft (CanX-4) autonomously programmed the other (CanX-5) to perform an orbit change using its on-board propulsion system, over a shared S-band ISL (Intersatellite Link) radio. CanX-5 subsequently executed the maneuver, raising its orbit, as confirmed by operators at UTIAS/SFL's MCC (Mission Control Center) in Toronto, Canada, and data from the JSpOC (Joint Space Operations Center) at Vandenberg Air Force Base, CA, USA.
- To the best of each organization's knowledge, this is the first time in history that one satellite has autonomously commanded another to execute propulsive maneuvers, with no operator in the loop.
- "This experiment was a key demonstration of a critical capability for multi-spacecraft asteroid missions, as well as constellations of spacecraft in Earth orbit," said Grant Bonin, DSI's Chief Engineer." It was also a first step in demonstrating ship-to-shore command relay in-space, which could potentially reduce the difficulty of communicating with very small spacecraft at long range."
- "The experiment was an important risk reduction exercise for DSI, which intends to use small spacecraft for initial asteroid prospecting missions in the next five years," Bonin continued. "The ability to relay commands from spacecraft to spacecraft, and perform in-space maneuvers autonomously, without operator intervention, is a critical capability that has major implications for mission-level redundancy—not just for asteroid missions, but also for low-cost Earth orbit constellations. This also shows that, if necessary, we can take the operator entirely out of the loop during a mission, which can translate into significant savings."
- Deep Space Industries' partner UTIAS/SFL challenges the current state-of-the-art in space technology performance while achieving remarkably low cost without sacrificing quality or introducing risk. In an age where significant advances have been made in data processing and information technology, SFL strives to leverage the latest advances in commercial technologies to provide performance advantages in space for tomorrow's space-based data users. The organizations' high rate of success and distinguished legacy of being on the forefront of space technology make the team a great fit for partnering with Deep Space Industries.
- "We are very pleased to have contributed to DSI's objectives through the tasking of CanX-4 and CanX-5. SFL welcomes the opportunity to partner with DSI, and we see great potential in such collaboration," noted Robert Zee, Director of SFL. "For SFL, it is an opportunity to apply our heritage and experience in an emerging application area, one that can potentially revolutionize humanity's use of deep space. SFL recognizes the pioneering work of DSI and their talented team, and looks forward to future projects with DSI."
- Bonin concluded: "Technologies such as launch-safe high-performance propulsion systems, long-range, high-data-rate communications, and autonomous spacecraft relative navigation are at the core of DSI's current technology development efforts. By combining our enabling technologies with the excellent satellite platforms being offered by SFL, DSI can provide innovative, reliable and robust systems for a wide range of customers and mission types, both in Low Earth Orbit and beyond."
• August 2015: Specialized drift recovery and station keeping algorithms were developed for the CanX-4 and CanX-5 formation flying mission and successfully verified on orbit. These algorithms performed almost exactly according to predictions. The highly successful CanX-4 and CanX-5 formation flying demonstration mission was completed in November 2014, ahead of schedule. 27)
- Drift recovery: CanX-4 and CanX-5 were mounted on to the PSLV launch vehicle using separate XPODs. The original design had the spacecraft ejected together from a single XPOD, and only separated once they had been fully commissioned and could be quickly brought in to stable relative orbits; however launch vehicle constraints prevented this. Therefore, it became very important that at least one spacecraft, the deputy, become fully commissioned quickly, in order to begin arresting their relative drift. Nominally, CanX-4 has been assigned as the chief, and CanX-5 as the deputy.
- From GPS data post-processed on the ground, the relative mean orbital elements immediately after launch vehicle kick-off were determined and can be seen in Table 3. With a relative semi-major axis of -708 m, the spacecraft were drifting apart at about 95 km/day.
Differential Mean Elements | Value |
Semi-major axis | -708 m |
Inclination | -2.32 x 10-3º |
Eccentricity | -1.75 x 10-4 |
RAAN (Right Ascension of the Ascending Node) | -1.51 x 10-3º |
Argument of perigee | 55.2º |
Mean anomaly | -57.6º |
- These relative states were input to the DRASTK(Drift Recovery and Station Keeping) program, which determined that the fuel optimal trajectory, after the deputy was fully commissioned, required the relative semi-major axis and inclination to be changed to 306 m and 0.00129º respectively, 26 days after launch. The total cost, including fuel lost to leakage, would be about 1.9 m/s, and rendezvous would occur in early October 2014.
- In summary, this drift recovery system included algorithms to compute fuel efficient return trajectories for separated spacecraft, as well as a controller to put the spacecraft on that trajectory, make mid-course corrections, and stop at the target range, as well as a user interface to simplify operations. A method to allow passively safe operations at extremely close ranges was also tested and executed on-orbit. The results were found to compare favorably to previous works in this field, and met all requirements. Drift recovery of the CanX-4 and -5 system was completed using 2.032 m/s of ΔV. Navigational and attitude errors were predicted to cause an increased fuel cost of about 5.75% during the drift recovery phase, and the on-orbit estimate of 5.72% came very close to matching this. In particular, this work will benefit the future implementation of constellation maintenance and orbit phasing controllers.
• August 2015: In only four months following launch, the CanX–4 and CanX–5 dual satellite formation flying mission was accomplished, ahead of schedule and with all mission objectives met. This exciting mission has broken new ground in the capabilities of nanosatellite formation flying performance—techniques that are entirely portable to larger satellites and will enable much higher-performance missions in turn. 28)
- CanX–4 and CanX–5 have pushed the boundary of what can be achieved with nanosatellites. The technology and algorithms demonstrated on CanX–4&5 open a wide range of potential missions and applications, ranging from on-orbit inspection and repair, to sparse aperture sensing, interferometry, and ground moving target indication.
- Meanwhile, both satellites continue to perform exceptionally well in orbit, with a large fraction of their propellant remaining. Both spacecraft are more than one year on orbit, having concluded their nominal mission.
• Nov. 5, 2014: In only four months following launch, the CanX-4 and CanX-5 dual satellite formation flying mission has been accomplished ahead of schedule. 29) 30)
- During the month of October, the CanX-4&5 nanosatellites used on-board propulsion, GPS-based relative navigation, and intersatellite radios to execute a series of precise, controlled, autonomous formations, ranging from 1 km range down to 50 m separation. In each case, more than 10 orbits were accomplished with sub-meter formation control and centimeter-level relative navigation, feats which (to SFL's knowledge) have never before been accomplished at the nanosatellite scale.
- Using carrier-phase differential GPS techniques for extremely high-precision relative navigation, the mission first undertook ATO (Along-Track Orbit) formations at 1000 m and at 500 m, after which the two spacecraft were reconfigured to perform PCO (Projected-Circular Orbit) formations (in which one satellite appears to circle the other from a ground observer's standpoint) at 100 m and then 50 m range. All guidance, navigation and control algorithms were developed in-house and executed autonomously on-orbit, with no ground intervention required during formation flight.
- The technologies and algorithms demonstrated on CanX-4&5 have several applications for a wide range of missions, such as on-orbit inspection and repair, sparse aperture sensing, interferometry, and ground moving target indication.
- Both satellites continue to perform exceptionally well, and the project still has a very large fraction of propellant remaining in CanX-5, and close to a full tank in CanX-4.
• July 30 , 2014: In only one month on orbit, the dual spacecraft, CanX-4 and CanX-5, formation flying mission has already accomplished firsts at the nanosatellite scale. Such achievements include orbit acquisition and phasing maneuvers, using on-board GPS telemetry and the CNAPS (Canadian Advanced Nanosatellite Propulsion System), to return the two satellites to within mutual communications range of each other. 31)
- When the mission was originally conceived, the two spacecraft were intended to be joined together on launch, and separated afterwards in space. However, due to launch vehicle constraints, the two spacecraft ended up being mounted to the launch vehicle and were ejected separately; this implied, the operations team had to get them commissioned quickly and then pilot them back together. Fortunately, the team had both satellites fully up and running within the first several days following launch, the maneuvering was started shortly thereafter.
- Already in this initial drift recovery phase, the team performed several maneuvers, planned on the ground and executed autonomously in orbit, that have adjusted CanX-5's semi-major axis to within meters of what was planned. This is quite exciting at this scale of satellite, and it demonstrates the capability to perform orbit acquisition and constellation management even with the smallest spacecraft.
- According to SFL, the CNAPS propulsion system has out-performed expectations thus far, and the excess capacity is allowing the CanX-4&5 operations team to expedite the drift recovery phase of the mission, providing the opportunity to begin high-precision formation flying experiments much sooner. To enable autonomous relative navigation and control, CanX-4&5 will employ innovative carrier-phase differential GPS techniques to obtain relative position measurements accurate to centimeter-levels.
• July 8, 2014: In just two weeks, the SFL (Space Flight Laboratory) has launched five satellites. Two satellites are Canadian BRIght Target Explorer (BRITE) satellites for studying luminous stars from orbit (launched 19 June 2014 on a Dnepr rocket from Yasny, Russia), another two are the CanX-4 and CanX-5 formation flying satellites (launched 30 June 2014 on PSLV-C23 from Sriharikota, India), and finally AISSat-2, is Norway's second satellite for ship tracking (launched 8 July 2014 on Soyuz 2-1B from the Baikonur Cosmodrome, Kazakhstan. With the exception of one of the two BRITE satellites, all satellites have been contacted and confirmed healthy. It is believed that the BRITE-Montreal satellite did not separate from its Dnepr launch vehicle. 32)
- With four new satellites working just fine in orbit, SFL now boasts 11 operational satellites that it has either developed in house or played a major role in developing. With more satellites to be launched and under construction, SFL remains Canada's most prolific satellite builder and exporter of complete satellite missions.
Payload / Experiments (CNAPS, GPS receiver, ISL)
CNAPS (Canadian Nanosatellite Advanced Propulsion System)
Precisely achieving and maintaining a satellite formation requires precise relative position determination and accurate thrusting. The total ΔV and relative position determination requirements are driven by the desired degree of precision for the satellite formation control.
Performance | Requirement |
Position control | 1 m |
Relative position determination | 10 cm |
Minimum relative distance | 50 m |
Maximum relative distance | 1000 m |
Attitude control | 5º (3σ) |
Intersatellite link range | 5 km |
Intersatellite link data rate | 10 kbit/s |
Total ΔV | 12 m/s |
Specific impulse | 40 s |
Thrust | 10 mN/thruster |
Minimum impulse bit | 0.7 mNs |
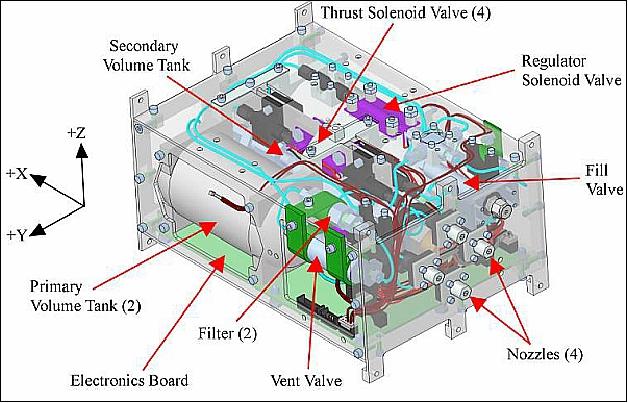
The custom-built CNAPS is of NanoPS (Nanosatellite Propulsion System) heritage flown on CanX-2 (launch April 28, 2008).
Both spacecraft, Can-X-4 and CanX-5 will be outfitted with CNAPS, a gas propulsion system to regulate the orbital distance between the two satellites. CNAPS uses liquefied sulfur hexafluoride (SF6) as a propellant and will be able to achieve a specific impulse of at least 35 s. With a fuel capacity of 300 ml, CNAPS is capable of a total ΔV of approximately 14 m/s. 33)
To maintain and transition between formations, the deputy satellite must thrust at regular intervals. Thrust is produced by 4 independently controlled thrusters in a cruciform configuration on one face of the satellite. Each thruster generates a constant thrust magnitude of 5 mN with a minimum impulse bit of 0.1 N s. Given this low thrust magnitude, it is occasionally necessary for CNAPS to thrust for extended periods of time. Since each thruster can be calibrated independently, the 4 thruster arrangement is used to mitigate any unwanted torques generated during extended thrusts due to thruster misalignment.
Since the thrusters on CanX-4&5 can only thrust at a constant 5 mN, it is necessary to use a PWM (Pulse Width Modulation) technique, whereby the thrust is held constant but the on time is varied. As long as the time between thrusts (i.e. the PWM period) is small compared to the rate of the dynamics, the PWM technique accurate approximates a continuous thrust method. The CanX-4&5 controller has a PWM period of 65 seconds.
GPS navigation algorithm
Both nanosatellites are equipped with a NovAtel dual-band GPS receiver and a dual-band GPS antenna of AAT (Aeroantenna Technology Inc.) to obtain accurate absolute position and velocity measurements. The GPS antennas are mounted on a face of each satellite orthogonal to its thrust axis, allowing it to retain some directional control over the antenna while the deputy thrusts in different directions. This control will be used to point the antenna as close to the zenith as possible in an effort to maximize the number of viewable GPS satellites.
The telemetry returned by the GPS receiver is used by the specialized relative navigation software (RelNav) to obtain a sub-cm relative position solution between the two spacecraft. RelNav requires raw GPS data from the receivers on both spacecraft in order to obtain this solution. The ISL provides a wireless link between the spacecraft that enables the autonomous transfer of this data between the spacecraft throughout the mission.
To perform the relative navigation both satellites must see a common set of GPS satellite from which to apply the differential navigation algorithms developed by the University of Calgary. The number of satellites required for fine navigation is four common GPS satellites, although there is a significant improvement once six satellites have been acquired. The formation flying algorithm has been developed to be robust to intermittent blackouts in GPS coverage. However, there is an increased cost in fuel and accuracy as a result of a momentary blackout in GPS coverage. 34)
Single-point GPS processing will allow each satellite to determine its absolute position to 2-5 m (rms) and its absolute velocity to 5-10 cm/s (rms). The geomatics group at the University of Calgary has provided UTIAS/SFL with an algorithm which uses carrier phase and Doppler data with double differencing techniques to achieve relative position estimates to within 2-5 cm (rms) and relative velocity estimates to within 1-3 cm/s (rms).

Formation flying control algorithm
The ISL (Intersatellite Link) was designed to close a 10 kbit/s communications link at separations of up to 5 km with 6 dB margin, well above the nominal maximum spacecraft separation of 1 km. Once a relative position solution is obtained, the deputy spacecraft employs the cold-gas thrusters of CNAPS to perform orbit control.
Both nanosatellites will be equipped with a dedicated OBC to run the formation flying control algorithm, called FIONA (Formation flying Integrated Onboard Nanosatellite Algorithm). The principle objective of FIONA will be to regularly determine the tracking error of the deputy spacecraft and to compute the optimal thrusts necessary to correct this error.
The ISL radio enables autonomous on-orbit communications between the two spacecraft. The ISL is a compact, medium-range, low-data-rate S-band radio link. Each spacecraft is equipped with a radio module and two dedicated patch antennas. The radio module is housed in a small enclosure which provides electromagnetic shielding, crucial to avoiding mutual interference between the ISL and the spacecraft telemetry transmitter, and substantially simplifies handling during spacecraft assembly, integration, and testing. The radio uses an RF transceiver subassembly for the transmission, modulation, demodulation, and reception of wireless data. The output of the RF transceiver is routed to a power amplifier and via a power splitter to each of the antenna ports. A baseband processor provides an interface between the spacecraft bus and the RF cores, communicating with the spacecraft payload computer using a serial link. This baseband processor also provides protocol translation and is firmware-upgradeable, allowing for the implementation of different protocol stacks.
The ISL consumes 400 mW of power when receiving and 600 mW of power during transmission. It provides 21.8 dBm of RF output power to the antennas, which emit 15.3 dBm of equivalent isotropically radiated power. With the measured antenna gains, simulations showed that a link availability of greater than 98% is achievable during formation flight, and better than 90% availability at the 5 km maximum design distance.
References
1) "The CanX-4 & CanX-5 Mission," URL: https://web.archive.org/web/20051230131037/http://www.utias-sfl.net/nanosatellites/CanX45/
2) Nathan G. Orr, Jesse K. Eyer, Benoit P. Larouche, Robert E. Zee, "Precision Formation Flight: The CanX-4 and CanX-5 Dual Nanosatellite Mission," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008, ESA SP-660, August 2008
3) J. K. Eyer, C. J. Damaren, R, E. Zee, E. Cannon, "A Formation Flying Control Algorithm for the CanX-4&5 Low Earth Orbit Nanosatellite Mission," Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.6.04, URL: https://web.archive.org/web/20100827082428/http://www.utias-sfl.net:80/docs/canx45-iac-2007.pdf
4) N. G. Orr, J. K. Eyer, B. P. Larouche, R. E. Zee, "Precision Formation Flight: The CanX-4 and CanX-5 Dual Nanosatellite Mission," ASTRO 2008 - 14th CASI Canadian Astronautics Conference, Montreal, Canada, April 29 - May 1, 2008, URL: https://web.archive.org/web/20100827081450/http://www.utias-sfl.net:80/docs/canx45-astro-2008.pdf
5) J. Eyer, C. Damaren, R. E. Zee, "The Guidance and Control Algorithms for the CanX-4 &5 Formation Flying Demonstration Mission," Proceedings of the 3rd International Symposium on Formation Flying, Missions and Technology, ESA/ESTEC, Noordwijk, The Netherlands, April 23-25, 2008, ESA SP-654, June 2008
6) S. Eagleson, K. Sarda, S. Mauthe, T. Tuli, R. E. Zee, "Adaptable Multi-Mission Design of CanX Nanosatellites," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, URL: https://web.archive.org/web/20110221105324/http://www.utias-sfl.net:80/docs/gnb-ssc-2006.pdf
7) K. Sarda, S. Eagleson, S. Mauthe, T. Tuli, R. E. Zee, C. C. Grant, D. G. Foisy, E. Cannon, C. J. Damaren, "CanX-4 & CanX-5: Precision Formation Flight Demonstrated by Low Cost Nanosatellites," .Proceedings of ASTRO 2006 - 13th CASI (Canadian Aeronautics and Space Institute) Canadian Astronautics Conference, Montreal, Quebec, Canada, April 25-27, 2006, URL: https://web.archive.org/web/20100827081446/http://www.utias-sfl.net:80/docs/canx45-astro-2006.pdf
8) E. P. Caillibot, C. C. Grant, D. D. Kekez, and R. E. Zee, "Formation Flying Demonstration Missions Enabled by CanX Nanosatellite Technology," Proceedings of the 19th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, Aug. 8-11, 2005, URL: https://web.archive.org/web/20090331093854/http://www.utias-sfl.net/docs/canx245-ssc-2005.pdf
9) Karan Sarda, Stuart Eagleson, Eric Caillibot, Cordell Grant, Daniel Kekez, Freddy Pranajaya, Robert E. Zee, "Canadian Advanced Nanospace eXperiment 2: Scientific and Technological Innovation on a Three-Kilogram Satellite," Proceedings of the 56th IAC (International Astronautical Congress), Fukooda, Japan, Oct. 17-20, 2005, IAC-05-B5.6.A.15; - also in Acta Astronautica, Vol. 59, 2006, pp. 236-245, URL: https://www.sciencedirect.com/science/article/abs/pii/S0094576506000944
10) Erica H. Peterson, Robert E. Zee, Georgia Fotopoulos, "InSAR Microsatellite Constellations Enabled by Formation Flying and Onboard Processing Capabilities, "Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-IX-1
11) Grant Bonin, Nathan Orr, Scott Armitage, Niels Roth, Ben Risi, Robert E. Zee, "The CanX-4&5 Mission: Achieving Precise Formation Flight at the Nanosatellite Scale," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.7B.5
12) "CANX-4 & CANX-5: Mission," UTIAS/SFL, January 15, 2014, URL: http://utias-sfl.net/?page_id=410
13) Niels Henrik Roth, "Navigation and Control Design for the CanX-4/-5 Satellite Formation Flying Mission," Master's thesis, University of Toronto, Toronto ON, Canada, 2010, URL: https://3c.gmx.net/mail/client/dereferrer?redirectUrl=https%3A%2F%2Ftspace
.library.utoronto.ca%2Fbitstream%2F1807%2F25908
%2F3%2FRoth_Niels_H_201011_MASc_thesis.pdf
14) Niels H. Roth, Grant Bonin, Robert E. Zee, "Hardware-in-the-Loop Simulation for the CanX-4/-5 Nanosatellite Formation Flying Mission," Proceedings of the 7th International Workshop on Satellite Constellation and Formation Flying (IWSCFF-2013), Lisbon, Portugal, March 13-15, 2013, paper: IWSCFF-2013 -05-07
15) Benoit P. Larouche, Grant Bonin, Cordell Grant, Robert E. Zee, "The Intersatellite Separation System: A Lightweight, Low-Power Deployment Mechanism for Formation Flying Nanosatellites," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.6.B8
16) "Launch of SPOT 7 completes Airbus Defence and Space observation satellite constellation," Airbus Defence and Space, June 30, 2014, URL: http://www.space-airbusds.com/en/press_centre/launch-of-spot-7-completes-airbus-defence-and-space-observation-satellite.html
17) Patrick Blau, "India's PSLV Rocket successfully delivers SPOT-7 & Small Satellites to Orbit," Spaceflight 101, June 30, 2014, URL: http://www.spaceflight101.com/pslv-c23---spot7-launch-updates.html
18) Information provided by Freddy M. Pranajaya of UTIAS/SFL, Toronto, Canada.
19) "Indian rocket successfully launches two Canadian satellites," UTIAS/SFL, June 30, 2014, URL: http://utias-sfl.net/?p=2115
20) "PSLV-C23 brochure," ISRO, URL: http://www.isro.org/pslv-c23/pdf/pslv-c23-brochure.pdf
21) Nathan J. Cole, Starla R. Talbot, "Guidance, Navigation, and Control for Commercial and Scientific Applications of Formation Flying," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-VIII-06, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4117&context=smallsat
22) "UTIAS-SFL Students Win Significant Awards for their Technical Papers," Satnews Daily, 14 August 2018, URL: http://www.satnews.com/story.php?number=698252980
23) Information provided by Freddy Pranajaya, Manager, Advanced Systems Group at UTIAS/SFL.
24) "Precise, Autonomous SmallSat Formation Flight from Space Flight Laboratory Scores the Canadian Alouette Award," Satnews Daily, 17 May 2018, URL: http://www.satnews.com/story.php?number=768927369#
25) Information provided by Daniel D. Kekez, Senior Missions Engineer at UTIAS/SFL.
26) "Deep Space Industries Teams with UTIAS Space Flight Laboratory to Demonstrate Autonomous Spacecraft Maneuvering," UTIAS/SFL, Jan. 26, 2016, URL: http://utias-sfl.net/?p=2386
27) Josh Newman, Robert E. Zee, "Drift Recovery and Station Keeping Results for the Historic CanX-4/CanX-5 Formation Flying Mission," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2014, paper: URL: SSC15–VIII–1, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3218&context=smallsat
28) Grant Bonin, Niels Roth, Scott Armitage, Josh Newman, Ben Risi, Robert E. Zee, "CanX–4 and CanX–5 Precision Formation Flight: Mission Accomplished!," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2014, paper: URL: SSC15–I–4, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3167&context=smallsat
29) "CanX-4&5 Formation Flying Mission Accomplished," UTIAS/SFL, Nov. 5, 2014, URL: http://utias-sfl.net/?p=2191
30) Josh Newman, Niels Roth, Scott Armitage, Ben Risi, Grant Bonin, Robert E. Zee, "Launch, Commissioning, and Operation of the CanX-4/CanX-5 Formation Flight Mission," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B4.7B.2
31) "CanX-4 & CanX-5 Formation Flying Mission, One Month in Space," UTIAS/SFL, July 30, 2014, URL: http://utias-sfl.net/?p=2154
32) "Space Flight Laboratory Launches Five Satellites in Two Weeks," UTIAS/SFL, July 8, 2014, URL: http://utias-sfl.net/?p=2139
33) Mohamed Ali, Stephen Mauthe, Freddy Pranajaya, "CNAPS: A Novel Propulsion System for the CanX-4 & CanX-5 Nanosatellite Mission," 27 ISTS (International Symposium on Space Technology and Science), Tsukuba, Japan, July 5-12, 2009, paper: 2009-t-02
34) B. Johnston-Lemke, R. E. Zee, "Attitude Maneuvering Under Dynamic Path and Time Constraints for Formation Flying Nanosatellites," Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-XI-6
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)
Spacecraft Launch Mission Status Payload References Back to top