BUAA-Sat (Beihang University Student Microsatellite)
EO
Mission complete
Beihang University
Quick facts
Overview
| Mission type | EO |
| Agency | Beihang University |
| Mission status | Mission complete |
| Launch date | 01 Aug 2014 |
| End of life date | 01 Nov 2014 |
| CEOS EO Handbook | See BUAA-Sat (Beihang University Student Microsatellite) summary |
BUAA-Sat (Beihang University Student Microsatellite)
BUAA-Sat is a university microsatellite project developed by the students of Beihang University, Beijing, China. This student hands-on project is an attempt to develop a low-cost, new technology demonstration and space scientific exploration, and a rapid response microsatellite platform. 1) 2) 3) 4)
Note: Beihang University was previously known as Beijing University of Aeronautics and Astronautics (BUAA), the name change to Beihang University occurred in 2002; however, the old abbreviation BUAA was retained.
The microsatellite will be launched to a SSO (Sun Synchronous Orbit) with an altitude of about 600 km; the mission requirements call for:
• Test of the applicability of COTS (Commercial off-the-shelf) components used in the onboard electronic system.
• Demonstration/verification of the deployment mechanism of a coilable mast.
• Provision of imagery of the on-board systems (verification) as well as imagery of the Earth.
• Provision of an amateur radio frequency service for the radio amateur community (ham operators) on a global scale.
Spacecraft
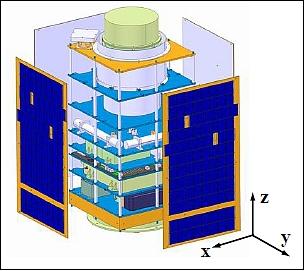
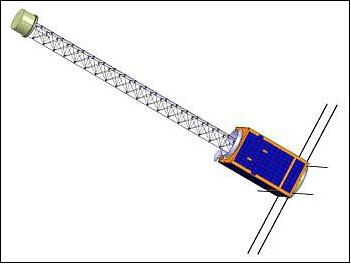
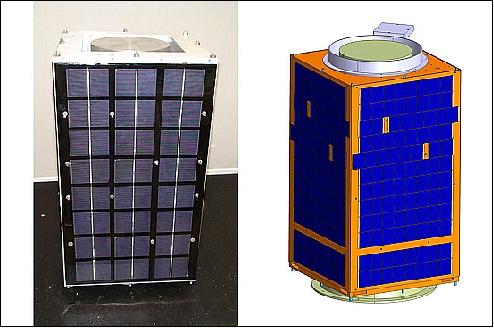
The microsatellite has a box structure of size 30 cm x 30 cm x 50 cm with a launch mass of ~ 30 kg; the mission design life is 3 months. The microsatellite includes three parts: the main satellite, a subsatellite, and the coilable mast. After mast deployment, the mast extends to a length of 2 m, with the subsatellite at the tip of the mast. The 'subsatellite' contains a magnetometer and a camera.
The main body and the subsatellite form a gravity-gradient stabilized configuration (Figure 2). With face-to-face cameras installed on the main body and the subsatellite, images can be taken from each other to verify the deployment status. The cameras and most platform subsystems are developed directly by the BUAA-Sat team. Some instruments are built by industrial sponsors.
Structure: The platform features a plate-rod layer structure, 9 plates are supported by 8 rods. All spacecraft components are accommodated on the various plates, which serve as mounting trays. The structure consists of Duraluminum, a material of low-cost, good strength and stiffness characteristics. Vibration tests have verified that the structure can withstand the severe launch environment loads. 5)
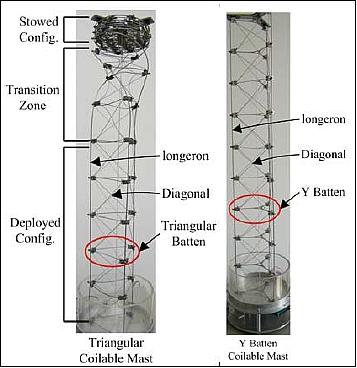
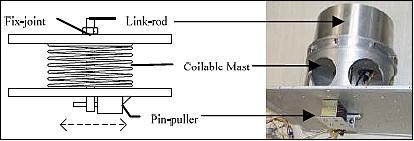
Mast mechanism subsystem: The mechanical subsystem is composed of a coilable mast and a lock-release device. The coilable mast consists of longerons, diagonal and Batten. The batten consists of components perpendicular to the longitudinal ones and the diagonal members. Figure 3 shows the two kinds of mast design according to the difference of the batten: triangular mast and Y-Batten mast.
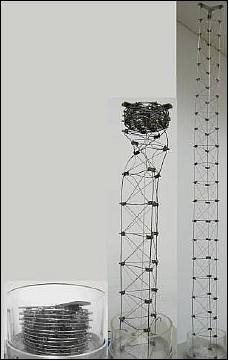
As shown in Figure 4, the mast can be stowed into a tight helix, with a diameter equal to the diameter of the deployed mast, by coiling the longerons; the deployed mast relies on the stored elastic energy in the coiled longerons. The deployment rate is controlled by a lanyard. It is an axial cable, one side of which is fixed to the tip of the mast, while the other is twisted around an axis. The axis is fixed with a damper which can control the angular velocity of the axis, and further the translational velocity of deployment. As a result, a small impact is experienced at the end of deployment.
A link-rod and pin-puller comprise the LRD (Lock and Release Device). One side of the link-rod is fixed with the mast tip, subsatellite, while the other side is locked to the mechanism module by a pin-puller. The OBC can actuate the pin-puller which unlocks the joint, resulting in the deployment of the mast (Ref. 3). 6)
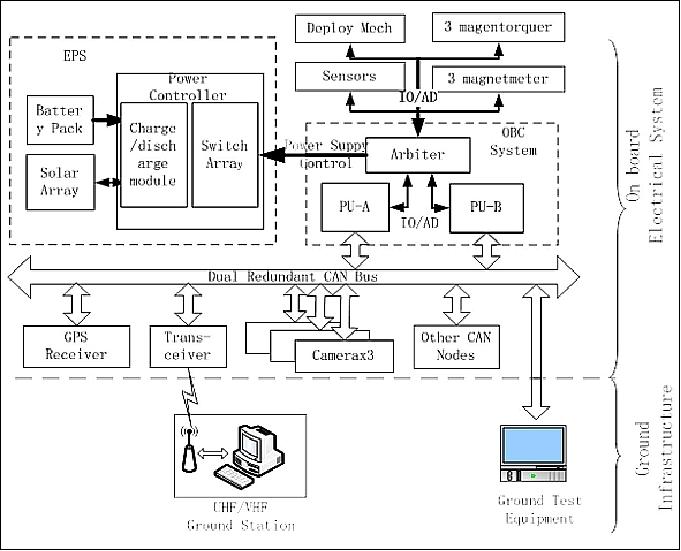
EPS (Electrical Power Subsystem): The EPS is composed of all necessary onboard components which generate, store, condition and distribute the electrical power required by all onboard subsystems during all phases of the microsatellite mission. The design provides the following features:
• Power is generated by 4 solar panels (featuring triple junction GaAs solar cells with 28% efficiency) mounted around the satellite structure. An average power of 11-15.5 W is provided.
• Use of the DET (Direct Energy Transfer) method and charging modules. The solar energy is stored in a Li-ion rechargeable battery pack, rated at 15 Ah.
• The primary unregulated power bus (9-12.5 V) and the slave regulated power bus(+5.3 V) allow the onboard equipment to use high power/mass ratio at system level.

ADCS (Attitude Determination and Control Subsystem): Use of a gravity-gradient passive attitude stabilization complemented by a 3-axis active attitude control strategy. The main objective of the ADCS is to establish a fairly good 3-axis stabilization and guarantee the control accuracy. A critical mission phase is after the microsatellite deployment into orbit requiring damping of the angular spacecraft velocities. This is followed by deployment of the coil able mast. The mast is used as a gravity-gradient boom working together with a ball-type fluid damper to stabilize the satellite’s attitude. 8)
Attitude sensing is provided by a 3-axis fluxgate magnetometer (HMR2300 of Honeywell), a GPS receiver, and a 3-axis integrated gyro assembly. Actuation is provided by a 3-axis magnetorquer.The ADCS is controlled by the OBC and the attitude control electronics.
The micro GPS receiver provides the onboard positioning information and timing services. The magnetometer measurements are combined with the GPS receiver data to provide the attitude vector of Earth's magnetic field. An EKF (Extended Kalman Filter) is used to estimate the satellite’s attitude and the angular velocity. As a digital controller, the OBC runs the attitude control law to drive the magnetorquer to output the control torque.
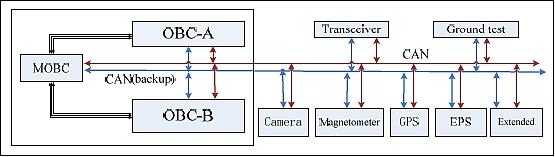
C&DH (Command and Data Handling) subsystem: The C&DH subsystem consists of dual fault tolerant OBC (On Board Computer) modules, and an arbitration module, referred to as MOBC (Monitor On-Board Computer). The objective of the redundancy concept of the three modules is to insure a high degree of reliability for the mission. The RTEMS (Real-Time Executive for Multiprocessor Systems) RTOS (Real-Time Operating System) is installed on the OBC hardware platform. 9) 10)
The OBCs feature 32-bit ARM RISC processors and operate in a cold-backup configuration plus arbiter unit hybrid scheme (Figure 10). The CPU is selected LPC2294@60MHz, which is produced by NXP Semiconductors N.V. The processors were selected for their radiation hardened CPUs as well as for their easy programming environment and low power consumption. An EDAC (Error Detection and Correction) unit with 2 MB of SRAM (Static Random Access Memory) is provided to handle SEUs (Single Event Upsets). The OBC manages all onboard communications via CAN (Controller Area Network) bus and via I2C bus. It also communicates and receives data from the payload for storage in flash memory for eventual download to the ground station.
TCS (Thermal Control Subsystem): The TCS design employs passive methods with MLI (Multi-Layered Insulation) blankets and thermal coatings to control the spacecraft environment. An extensive thermal analysis of the TCS design and verification of BUAA-Sat is provided in Ref. 1). The passive thermal control is supplemented in part by an active thermal control (polyimide heating film). 11)
RF communications: The TT&C (Telemetry, Tracking & Command) subsystem consists of a low power S-band transceiver and a microstrip antenna. In addition, there are two full duplex VHF/UHF transceivers and deployable turnstile antennas , which provide near omnidirectional coverage. The UHF/VHF data frame uses the AX.25 communication protocol. The design of all bands (S-band and VHF/UHF bands) is also compatible with GENSO (Global Educational Network for Satellite Operations) ground station network concept for future satellite data reception on a worldwide scale. 12)
Launch
A launch of BUAA-Sat as a secondary payload is scheduled for August 2014 on a CZ-2C vehicle.
Orbit: Sun-synchronous orbit, altitude ~ 550 km, inclination = 97º.
Sensor complement (Cameras)
The objective of the camera system on BUAA-Sat is to provide the following tasks: 13)
1) Onboard monitoring function to verify the deployment sequence of the microsatellite and in particular to monitor the deployment of the coilable mast. Proper mast deployment is essential for the success of the mission.
2) To perform some imaging of selected target areas on Earth.
The 3-camera system is allocated in the following way:
• Camera 1 is mounted on the bottom of the microsatellite (pointing into the -Z direction). The camera will monitor the deployment of the microsatellite.
• Camera 2 is mounted on top of the microsatellite (pointing into the +Z direction). The camera will monitor the deployment of the coilable mast; it is also used for Earth observations since the mast is nominally pointed toward nadir.
• Camera 3 is mounted in the subsatellite (at the tip of the mast) pointing into the -Z direction. The camera is also used to monitor the deployment of the mast.
To achieve the image acquisition functions as well as image data compression and transmission, the payload system is comprised of three identical camera systems. Figure 12 shows a functional diagram of the camera system where each camera is identified by a CAN bus ID and one ICTB (Image Compression & Transmit Board).
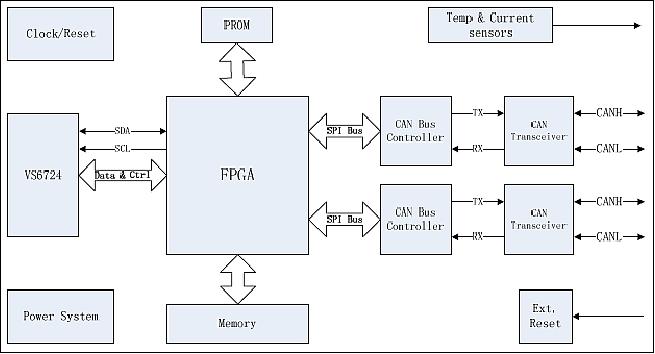
A CMOS camera module ( 2 Mpixel) with JPEG compression integrated from STMicroelectronics is adopted to realize image acquisition and compression in an easy way. The camera module is designed specially for low power systems with ultra low standby current, and also the high resolution and a wide range of image enhancement functions can ensure high image quality.
An industry provided FPGA MCU (Microcontroller Unit) chip was selected for each camera system to realize the data management and communications according to the low complexity of the system and specific space environment. The I2C (Inter-Integrated Communication) control bus is used to configure the camera module; the SPI (Serial Peripheral Interface) is used to communicate with the CAN bus controller.
References
1) Jianbin Han, Xinsheng Wang, Bo Lee, Kaixing Zhou, Haibo Ma, Yongchao Dai, “Thermal control design and verification of BUAA-SAT,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12- B4. 6A. 10
2) Kaixing Zhou, “Project Overview,” URL: http://sat.buaa.edu.cn/English/other.asp?id=1&menuid=2
3) Wei Zhang, Ruilan Wu, Bo Lee, “Student Design and key technologies of BUAA Student Microsatellite,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, paper: IAC-09-E2.3.3
4) Xinsheng Wang, Hai Huang, Bo Li, Xiaohui Wang, “Low-Cost, Rapid University Micro-Satellite Platform for Space Experiment,” Proceedings of the 4th CSA-IAA (Chinese Society of Astronautics - International Academy of Aeronautics) Conference on Advanced Space, Shanghai, China.Sep 5-8, 2011
5) Haibo Ma, “Structure Subsystem.” URL: http://sat.buaa.edu.cn/English/other.asp?id=38&menuid=3
6) Haibo Ma, “Mechanism Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=41&menuid=3
7) Kaixing Zhou, “Electrical Power Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=46&menuid=3
8) Shuai Dang, “ADCS Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=47&menuid=3
9) Li Bo, “OBDH Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=43&menuid=3
10) Xinsheng Wang, Bo Li, Kaixing Zhou, Hao Zhang, “Design and Reliability Analysis of Heterogeneous Fault-tolerant On-board Computer System for Micro-satellites,” Proceedings of the UN/Japan Workshop and The 4th Nanosatellite Symposium (NSS), Nagoya, Japan, Oct. 10-13, 2012, paper: NSS-04-0124
11) Jianbin Han, “Thermal Control Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=42&menuid=3
12) Xinsheng Wang, “TT&C Subsystem,” URL: http://sat.buaa.edu.cn/English/other.asp?id=44&menuid=3
13) Kaixing Zhou, “Payload,” URL: http://sat.buaa.edu.cn/English/other.asp?id=45&menuid=3
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).