BRITE (BRIght-star Target Explorer) Austria
Non-EO
Operational (extended)
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Operational (extended) |
| Launch date | 25 Feb 2013 |
BRITE (BRIght-star Target Explorer) Constellation / BRITE Austria, UniBRITE
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
BRITE (BRIght-star Target Explorer) / CanX-3 (Canadian Advanced Nanosatellite eXperiment-3) is a low-cost Austrian/Canadian constellation of nanosatellites - a collaborative science demonstration mission of the University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory (UTIAS/SFL), the Graz University of Technology (TU Graz), and the Institute of Astronomy at the University of Vienna, both of Austria, with Sinclair Interplanetary, and Ceravolo Optical Systems Ltd., Ontario, as subcontractors. 1) 2) 3) 4) 5) 6) 7) 8) 9)
The objective is to make photometric observations of some of the apparently brightest stars in the sky and to examine these stars for variability (low-level oscillations and temperature variations). The observations will have a precision at least 10 times better than achievable using ground-based observations; the paylaod will be packaged inside a CanX-class nanosatellite (CanX-3). The mission's science team includes collaborators from Canada and Austria: the University of British Columbia (UBC), l'Université de Montréal, the University of Toronto, and the University of Vienna (Universität Wien).
The BRITE constellation aims to be a modest sized instrument operating in low Earth orbit, above the effects of the atmosphere, capable of fulfilling the science objectives. It consists of a maximum of two nanosatellites, each equipped with a small-lens telescope, able to observe the brightest stars in the sky to visual magnitude 3.5, over a FOV of 24º, with a sampling time of up to 15 minutes once per satellite orbit (typically 100 minutes), and with a differential brightness measurement accurate to at least 0.1% per sample (all numbers are minimum requirements; actual performance may be better). A cluster of four satellites is needed to improve the duty cycle and would obtain color information (with two satellites having blue and two having red filters).
Science requirement | Minimum requirement |
Visual magnitude limit | + 3.5 |
Positional constraints | None except for Sun, Earth, and Moon exclusion zones |
FOV (Field of View) | 24º diameter |
Differential photometry error/single observation | < 0.1% |
Error of amplitude spectrum for > month | < 2x10-5 (20 ppm) |
Cadence (repeat of the same field) | < 100 minutes |
Duration of the mission | > 2 years |
Selection of a constellation: There are many reasons for using a constellation of nanosatellites over a single satellite. For one, each telescope will be optimized to work with only one color filter. By collecting color and intensity data from at least two different BRITE satellites, each with a different filter, the science capacity of BRITE is greatly enhanced. Color provides temperature information that helps astronomers to better identify modes of oscillation.
The BRITE telescope is being designed to have no moving parts (low cost amd risk mitigation). This implies that filter changes cannot be done by using one BRITE telescope in orbit. In having two nanosatellites in the same orbit, each with a different filter, the development costs can be minimized by keeping each BRITE satellite identical except for the telescope and by reducing nonrecurring engineering costs.
Another reason to have a constellation of nanosatellites is that multiple satellites observing the same region of interest can increase the overall duty cycle of observation beyond what a single nanosatellite can provide. Since the stars of interest are located in all parts of the sky, a continuous viewing zone for all targets of interest is not possible. - Having two pairs of BRITE satellites in two slightly different orbits that have different viewing times for the same region of interest doubles the duty cycle and significantly improves the spectral window.
A final reason for using a constellation of nanosatellites is the mitigation of risk. By having multiple, low cost satellites instead of a single large satellite, the associated launch risk is greatly reduced. Additionally, the failure of any single BRITE satellite would not end the mission and the other satellites in the BRITE-Constellation would still achieve all the primary science objectives (Ref 3).
The primary satellite design requirement calls for attitude control. The strict photometric error-tolerance places a high precision requirement on the ADCS system to ensure BRITE will always keep regions of interest surrounding each star within the same pixel areas on the imager.
Mission requirement | Minimum requirement |
Field of acquisition | < 30 arcminutes |
Field re-acquisition accuracy | 1.5 arcminutes |
Attitude error during observation | 1.6 arcmin over 15 minutes |
Data transfer/day | > 180 kB |
Onboard memory storage | > 360 kB |
Window of observation per orbit | > 15 minutes |
Detector temperature | < 20ºC |
Constellation Background
The BRITE constellation will be the world‘s first nanosatellite constellation dedicated to an astronomy mission.
The origins of BRITE-Constellation can be traced back to the founding of the SFL (Space Flight Laboratory) when, in 1998, SFL took on a leading role in the development of the MOST (Microvariability and Oscillations of STars) microsatellite mission. MOST’s mission was to perform asteroseismology of solar type stars through the use of high-precision photometry (i.e. measuring brightness variations over time). Because atmospheric scintillation can easily mask minute variations in a star’s brightness, even a small space-borne telescope can far exceed the photometric precision achievable from the ground.
Despite its potential, MOST faced some significant challenges, not least of which was that staring at stars for weeks at a time required attitude stability far in excess of what had been previously accomplished with such a small satellite. As such, at the time of its launch in 2003, some in the spacecraft industry were still questioning whether such a mission could be achieved on the microsatellite scale. Still in operation in 2014, MOST went on to demonstrate arcsecond-level pointing (50 x the mission requirement) and photometric precision more than 50 x better than had ever been achieved before. In the process, it demonstrated that small satellites were capable of far greater things than they were being given credit for.
At the same time MOST began enjoying such success, a burgeoning nanosatellite program was ramping up at UTIAS/SFL. After MOST’s launch in 2003, the natural question became whether the expertise gained from the MOST mission could be leveraged to create a nanosatellite platform that was also suitable for precision astronomy. The question was put to the originator of the MOST concept, Slavek Rucinski, who realized that a nanosatellite could indeed fill another niche in the astronomical world. That is, in part due to the push to observe ever fainter targets, the brightest stars in the Earth’s sky (V < 4) were poorly studied relative to their fainter counterparts. Many modern precision instruments with their increasingly large apertures were simply too sensitive to study them. Simply put, it was not only possible to do precision photometry of bright stars with a nanosatellite, it was in fact the ideal platform from which to study them.
The concept was further strengthened when Slavek Rucinski observed that the stars in the Earth’s sky that are apparently bright also tend to be intrinsically bright. Intrinsically bright stars tend be massive, which provided another niche that could be filled since, again, massive stars are poorly studied relative to other star types. Massive stars are of particular interest to many astronomers because they tend to lead short and turbulent lives and the most massive of them, those above eight solar masses, end their lives as supernovae. As such, through the stellar material and heavy elements they shed throughout their lives, massive stars tend to dominate the ecology of the universe and ultimately seeded it with the elements necessary for life as we know it. A study of massive stars was the perfect complement to the MOST mission and its study of solar-type stars.
The BRITE concept was born. But once again, there were questions about whether a spacecraft so small could achieve the pointing required for such precision science. — In 2004 a concept study, funded by the CSA (Canadian Space Agency), established feasibility of the BRITE mission. In 2005, funding for BRITE was received from a seemingly unlikely source, the University of Vienna, where Werner Weiss, a member of the MOST Science Team, had become very interested in the BRITE concept. Preliminary design of that spacecraft, dubbed UniBRITE, had only just begun when, in January 2006, the Austrian Space Agency (FFG) funded a second BRITE satellite, dubbed BRITE-Austria. Intended to be identical to UniBRITE, BRITE-Austria would be constructed and tested in Austria under the guidance and mentorship of SFL personnel.
With six BRITE satellites now in orbit (Sept. 2014) and two entering their second year of operations, the BRITE-Constellation is now doing for nanosatellites what MOST did for microsatellites a decade before.
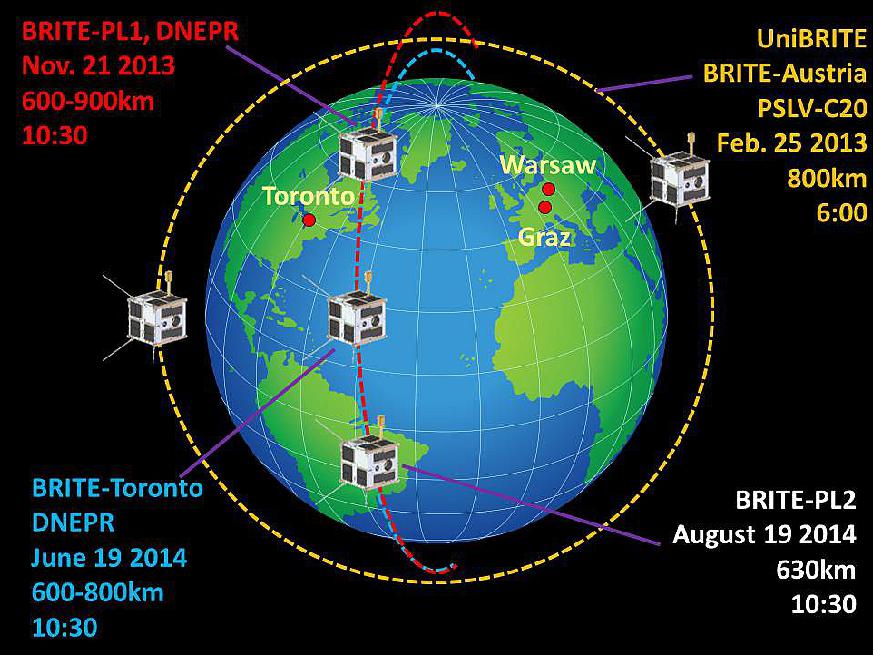
- BRITE-Austria and UniBRITE were launched as secondary payloads on Feb. 25, 2013
- BRITE-PL-1 (Lem) of Poland was launched on Nov. 21, 2013
- BRITE-CA-1 (Toronto) and BRITE-CA-2 (Montreal) of Canada were launched on June 19, 2014
- BRITE-PL-2 (Heweliusz) of Poland was launched on Aug. 19, 2014.
Extension of the Nanosatellite Constellation
In 2011, the BRITE Constellation consists of a group of six nanosatellites with the following participants of the BRITE consortium: 11) 12)
1) The University of Vienna and FFG/ALR (Austria’s space agency) are financing the development of two BRITE satellites and development is nearing completion.
2) SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland will be preparing two additional satellites. The first Polish satellite, BRITE -PL 1, will be a modified version of the original SFL design. The second Polish satellite, BRITE-PL 2, will include the significant changes to be implemented by SRC PAS.
The Polish technical participation in the BRITE project is supported by the Ministry of Science and High Education. The participation in the BRITE consortium gives Poland the possibility to launch its first Polish scientific satellite into space. The Polish participation in the BRITE consortium was established in October 2009 by SRC/PAS and NCAC/PAS (Nicolaus Copernicus Astronomical Center/ Polish Academy of Sciences). 13)
3) The CSA (Canadian Space Agency) is also funding two satellites in the constellation. In January 2011, CSA signed an agreement to support the BRITE constellation by contributing two satellites targeting a launch in 2012. The two Canadian satellites will join the four other satellites funded by the Austrian and Polish governments. 14)
The operation of three pairs of BRITE nanosats will significantly improve the coverage of the parameter space addressed in this proposal (compared to only one BRITE), and in particular the statistical significance of the science conclusions to be drawn. The best configuration would be to have two launches, each with a pair of BRITE nanosats with each kind of filter, and each orbit pair separated in the sky as much as possible. This is the rationale behind the BRITE constellation of four individual satellites.
Each BRITE satellite utilizes a number of innovative technologies including miniature reaction wheels, star tracker and optical telescope, all sized and designed around the generic CanX (Canadian Advanced Nanosatellite Experiment) bus of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory).
For a better overview of the BRITE constellation, the eoPortal will create a separate file for the spacecraft of each consortium participant when the information becomes available — with this file being the description of the BRITE Austria constellation.
The initial BRITE constellation is based on pioneering Canadian space technology, built in partnership (joint venture) with Austrian institutions. The Austrian share of the project (BRITE-Austria and UniBRITE) is funded by the Austrian Space Program - representing the first Austrian satellites.
• The University of Vienna (Austria) has funded UTIAS/SFL to build one satellite, called UniBRITE.
• The Graz University of Technology (TU Graz) is also cooperating with UTIAS/SFL to produce a further nanosatellite of the constellation, called BRITE-Austria, funded by FFG/ALR.
Each of these two BRITE satellites will have a different filter, one will be equipped with a 390-460 nm (blue-spectrum) bandpass filter and the other will be equipped with a 550-700 nm (red spectrum) bandpass filter.
Country | No of Satellites | Nanosatellite Designation |
Austria | 2 | TUGSAT-1/BRITE-Austria & UniBRITE |
Poland | 2 | BRITE-PL1 (LEM) & BRITE-PL2 (Heweliusz) |
Canada | 2 | BRITE/CanX-3A (BRITE-Toronto) & BRITE/CanX-3B (BRITE-Montreal) |
Spacecraft
All spacecraft in the constellation use the GNB (Generic Nanosatellite Bus) platform, also referred to as CanX-3, developed at UTIAS/SFL (of CanX-2 heritage). The first BRITE satellite, UniBRITE, is being built by SFL for the University of Vienna. The second BRITE satellite, BRITE-Austria, is being developed by the Graz University of Technology with assistance (components) from SFL. The BRITE team has asked the Canadian Space Agency (CSA) to complete the BRITE constellation with funding for two Canadian BRITE nanosatellites.
Note: The Graz University of Technology, abbreviated as TUG, refers to its BRITE-Austria nanosatellite also as TUGSat-1. 15) 16)
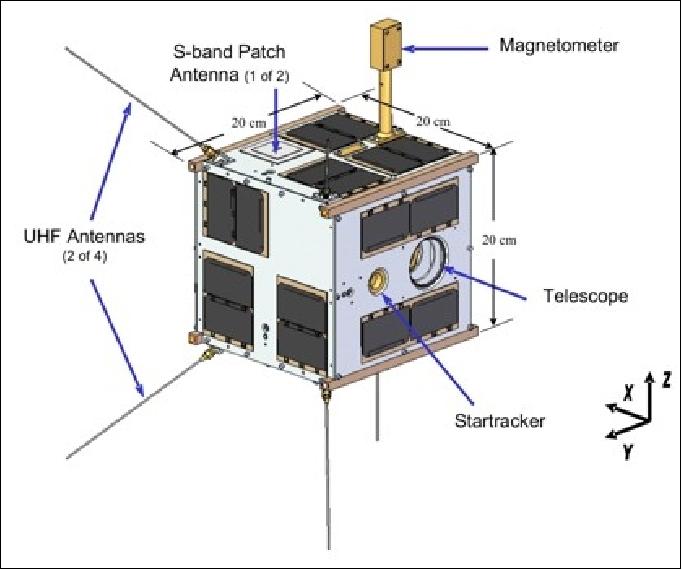
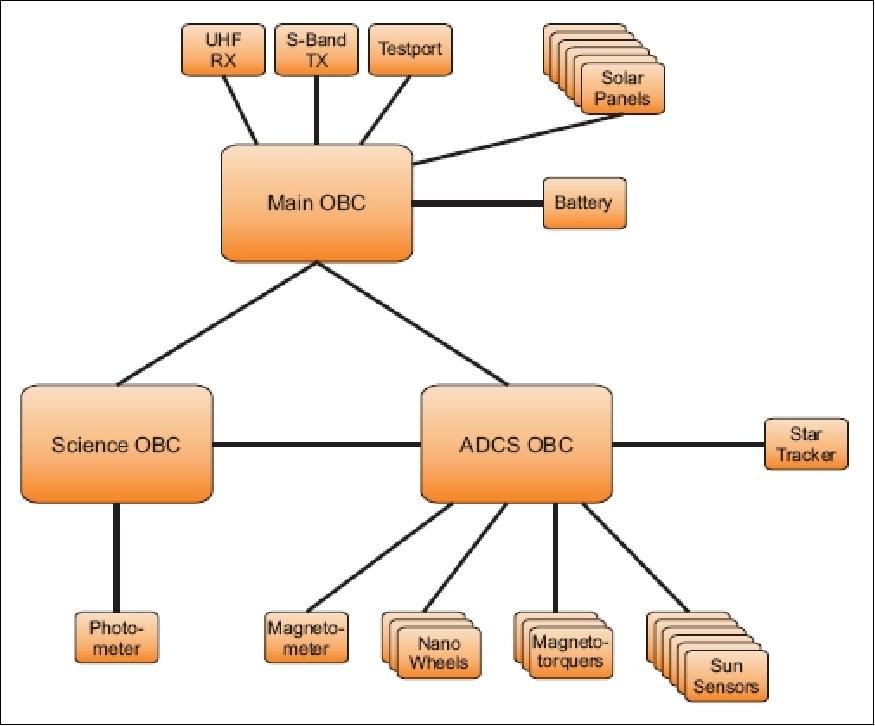
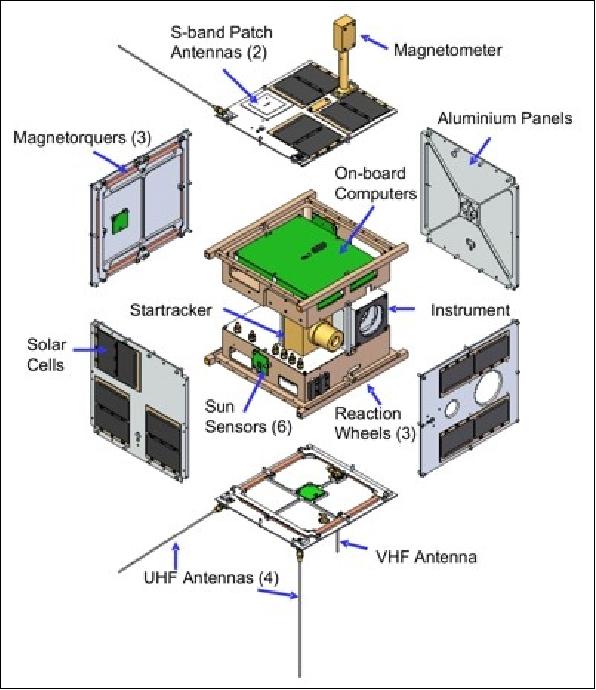
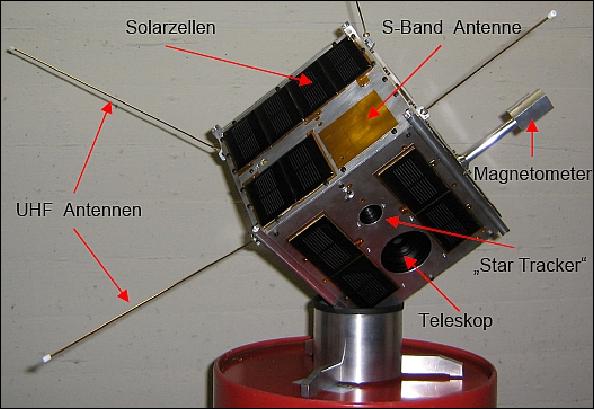
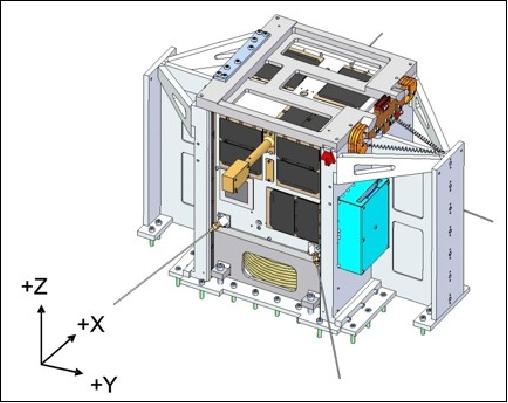
The GNB is a modular spacecraft bus designed around a 20 cm x 20 cm x 20 cm cube form factor that provides all basic functional capabilities for a wide range of nanosatellite missions (up to 12 kg and potentially bigger), and provides a platform for state-of-the-art, high-performance applications not previously achievable with nanosatellites. A typical GNB consists of one ARM7 housekeeping computer, two ARM7 computers for attitude/propulsion control and payload operations, CMOS imagers, a power system with triple-junction solar cells and Lithium-ion batteries, passive thermal control, UHF uplink, a 32-256 kbit/s S-band downlink, and a 1 arcmin three-axis attitude control system consisting of tiny reaction wheels, sun sensors, magnetometer and star tracker. 18) 19)
EPS (Electrical Power Subsystem): The GNB design incorporates a direct energy-transfer power system utilizing between four and eight solar cells on each face and battery storage to supply 10 W peak and 5.6 W nominal for the satellite.
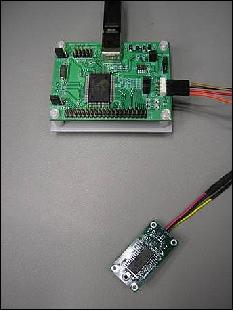
Each BRITE nanosatellite contains three processor boards, the OBC board handles the housekeeping and communications, a second computer is used for all ADCS support functions, while the third board is used for the science payload and its data handling. Communications between the boards occurs through serial peripheral interfaces. Each processor board is based around an ARM7TDMI processor with a code memory of 256 kB and triple-vote 2 MB of hardware EDAC (Error Detection And Correction) protected SRAM memory to store program variables and data. Longer term payload data storage is provided in 256 MB of flash memory. The on-board computer uses a multi-threaded operating system developed at SFL.
ADCS (Attitude Determination and Control Subsystem). The spacecraft is 3-axis stabilized with 1 arcmin stability. The altitude control software implements an Extended Kalman Filter that uses the various attitude sensors to predict and correct the attitude of the spacecraft.
The attitude sensor suite in each GNB spacecraft comprises of a three-axis magnetometer, six sun sensors (each consists of a phototransistor and digital pixel arrays for coarse and fine attitude determination), and a star tracker. Three magnetorquers are employed to provide coarse attitude control and momentum dumping capability. Three orthogonal reaction wheels perform fine attitude controls.
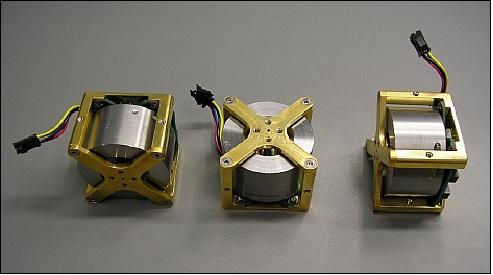
A reaction wheel for nanosatellites was developed by Sinclair Interplanetary of Toronto in collaboration with SFL. The wheel fits within a box of 5 cm x 5 cm x 4 cm, has a mass of 185 g, and consumes only 100 mW of power at nominal speed. A max torque of 2 mNm is provided (30 mNms momentum capacity). No pressurized enclosure is required, and the motor is custom made in one piece with the flywheel. The reaction wheel technology is scalable. CanX-3/BRITE is the first mission to use this actuator (3 wheels). 20) 21)
UniBRITE and BRITE-Austria use the ComTech/AeroAstro MST (Miniature Star Tracker) as their primary attitude sensor for attitude determination. The update rate of the MST limits the cadence of the attitude determination and control cycle to 0.5 Hz. This slow cadence has a significant impact on the overall attitude performance, but this can be mitigated through the use of high bandwidth attitude filter and controller. 22)
The attitude subsystem of the BRITE satellites is among the most critical spacecraft systems in ensuring mission success. For massive stars, the period of light variations are on the scale of hours to months, therefore the satellites will perform 15 minute observations of multiple target star fields each orbit. Upon returning to a previously imaged target, the attitude system is required to hold the point-spread-function of the imaged stars to within 3 pixels of the original point locations, in order to trim out the pixel-to-pixel variations of the telescope detector. This stringent requirement implies a one arc-minute pointing control with long duration attitude stability and rapid reacquisition. Until recent advances in the miniaturization of attitude hardware, these requirements were insurmountable on a nanosatellite scale. Despite these advancements, a major challenge for the BRITE satellites was to characterize and tune these attitude components (reaction wheels and star trackers, in particular), as they operate at the edge of the required performance envelope. Further, novel attitude estimation and control techniques were applied, which were essential, given both the hardware compliment and their limitations (Ref. 22).

Reaction wheels: The BRITE satellites make use of the Sinclair-SFL 30 mNms reaction wheels. These highly capable reaction wheels have over five years of flight heritage onboard the CanX-2 satellite, and an additional three year of heritage aboard the AISSat-1 satellite and continue to operate without incident. The reaction wheels are capable of storing more than 30 mNms of angular momentum and delivering torques up to 2 mNm.
RF communications: Each CanX-3/BRITE nanosatellite is capable of full duplex communications with the ground. The uplink uses UHF while an S-band transmitter with BPSK modulation is used in the downlink. Each satellite can also support a VHF beacon. The expected data volume is 2-8 MB/day.
Spacecraft mass, volume, total power | 6.5 kg, 20 cm x 20 cm x 20 cm, 5.4-11 W (6 W average) |
Bus voltage | 4.0 V (nominal, unregulated) |
Solar cells | Triple junction solar cells (face mounted) |
Battery type, capacity | Li-ion, 5.3 Ah |
Attitude determination | 10 arcsec |
Attitude control accuracy, stability | < 1.0º, 1 arcmin rms (or FWHM of ~2.2 arcmin) |
Onboard payload data storage | Up to 256 MByte |
RF communications |
|
Mission duration | 2 years (min) |
Launch
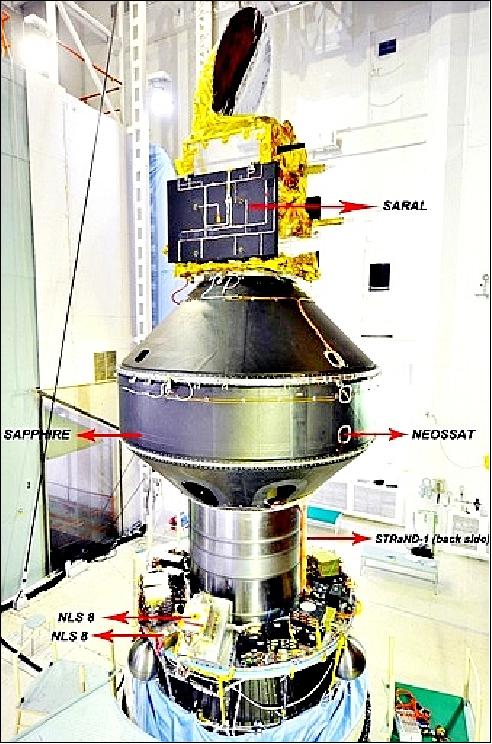
The first two nanosatellites of the BRITE/CanX-3 constellation [Austrian mission: BRITE-Austria (CanX-3B) and UniBRITE (CanX-3A) were launched as secondary payloads on Feb. 25, 2013 on the PSLV-C20 vehicle of ISRO/Antrix from Shriharikota/India. The primary payload on this mission was SARAL (Satellite with Argos and AltiKa), a collaborative mission of ISRO and CNES. 23) 24) 25)
To facilitate rapid launches, SFL has adopted an approach to build customizable separation systems for any nanosatellite. These separation systems can be integrated with the satellites prior to launch site delivery and hence, make launch coordination easier. The SFL XPOD (Experimental Push Out Deployer) separation system interfaces the GNB-based spacecraft to practically any launch vehicle. Spacecraft up to 12 kg may be accommodated in existing XPOD designs.
UTIAS/SFL refers to the XPOD launch of the nanosatellites as NLS-8 (Nanosatellite Launch Service-8). UniBRITE (NLS-8.1), BRITE-Austria (NLS-8.2) and AAUSAT3 (NLS-8.3).
Secondary Payloads
• Sapphire (Space Surveillance Mission of Canada), a minisatellite with a mass of 148 kg.
• NEOSSat (Near-Earth Object Surveillance Satellite), a microsatellite of Canada with a mass of 74 kg.
• BRITE-Austria/TUGSat-1 (Graz University of Technology), Austria, a nanosatellite with a mass of ~6.5 kg.
• UniBRITE (Technical University of Vienna), Austria, a nanosatellite with a mass of ~ 6.5 kg.
• AAUSat-3 (Aalborg University CubeSat-3), a student-developed nanosatellite (1U CubeSat) of AAU, Aalborg, Denmark. The project is sponsored by DaMSA (Danish Maritime Safety Organization).
• STRaND-1 (Surrey Training, Research and Nanosatellite Demonstrator), a 3U CubeSat (nanosatellite) of SSTL (Surrey Satellite Technology Limited) and the USSC (University of Surrey Space Centre), Guildford, UK. STRaND-1 has a mass of ~ 4.3 kg.
Orbit: Sun-synchronous near-circular orbit, mean altitude = ~775 km, inclination = 98.6295º, orbital period of 100.32 minutes, LTAN (Local Time on Ascending Node) = 6:00 hours.
Note: SARAL (and also the BRITE constellation) will fly on the same orbit as Envisat, to ensure a continuity of altimetry observations in the long term. On the other hand, the local time of passage over the equator will be different due to specific cover requirements for the instruments constellation of the Argos system.
Mission status
• October 2018: On 25 February 2013 the first Austrian satellites TUGSAT-1/BRITE-Austria and its sister satellite UniBRITE were launched. They are part of the world’s first nanosatellite constellation, called BRITE (BRIght Target Explorer), dedicated to the observation of the brightness variations of massive luminous stars. The constellation consists of five nearly identical spacecraft from Austria, Canada, and
Poland. Despite a design lifetime of two years the spacecraft with a mass of about 7 kg are in healthy conditions and are continuing to deliver science date with unprecedented quality. The Austrian BRITE satellites are operated on a continuous basis from the ground station at TU Graz, the Polish ones from Warsaw and the Canadian satellite from Toronto. The S-band/UHF ground stations are fully compatible and interoperable via the Internet, thus allowing operations of any spacecraft from any other station remotely. 26)
- 37 star field observations, typically lasting for up to 180 days have been completed, five are currently on going. So far, 502 stars have been observed and 4.2 million photometric measurements been made by BRITE Constellation. The selection of star fields is in the hands of the Executive BRITE Science Team (BEST), the operational teams are responsible for mission planning, configuration and control of the spacecraft.
- Although the CCD sensors of the spacecraft experience degradation by radiation, a method called chopping was introduced to mitigate these effects. Although the design and testing did not strictly follow ECSS standards, care was taken not to compromise on testing. Especially, substantial effort was dedicated to system-level testing, often under-represented in nanosatellite projects. In addition, 1000 hours of burn-in tests were carried out.
- Since BRITE uses the Science S-band in downlink at rates up to 256 kbit/s and amateur radio UHF spectrum in the uplink, interference problems started in late 2013. These problems were cured by upgrading of the communications system.
- Five and a half years of successful operation of a constellation of five nanosatellites in an international context with three ground stations in Europe and Canada show that a science mission with demanding requirements can be conducted reliably and with excellent scientific results.
- Operational procedures allowed to optimize battery lifetime and thermal conditions in the spacecraft. The chopping method introduced during the mission proved to mitigate the degradation effects on the CCD (hot pixels and warm columns) by radiation. This was made possible by the excellent ADCS performance which is better than specified and is in the 1 arcminute range.
- An analysis of the performance of the Austrian BRITE satellites, which are in space for the longest period, indicates that they can be operated for at least two more years.
- Scientifically, the BRITE Constellation:
a) comprised the collection of high-presicion brightness measurements (6 months long) for more than 500 stars in two colors
b) allowed the detailed investigation of pulsations driven by gravity modes in one of the brightest Slowly Pulsating B star
c) enabled the modeling of spots induced rotational variations in the presence of pulsations
d) led to a unique study of the ‚heart beat‘ phenomenon of close interacting binary systems
e) provided unprecedented details of the interaction between stellar pulsations, circumstellar disks and shells.
- This proves that well engineered and carefully tested nanosatellites can be operated over several years meeting stringent requirements.
• October 25, 2017: A Canadian-led international team of astronomers recently discovered that spots on the surface of a supergiant star are driving huge spiral structures in its stellar wind (Figure 11). Their results are published in a recent edition of Monthly Notices of the Royal Astronomical Society. 27) 28)
- Massive stars are responsible for producing the heavy elements that make up all life on Earth. At the end of their lives they scatter the material into interstellar space in catastrophic explosions called supernovae - without these dramatic events, our solar system would never have formed.
- Zeta (ς) Puppis is an evolved massive star known as a 'supergiant'. It is about sixty times more massive than our sun, and seven times hotter at the surface. Massive stars are rare, and usually found in pairs called 'binary systems' or small groups known as 'multiple systems'. Zeta Puppis is special, however, because it is a single massive star, moving through space alone, at a velocity of about 60 km/s. "Imagine an object about sixty times the mass of the Sun, travelling about sixty times faster than a speeding bullet!" the investigators say. Dany Vanbeveren, professor at Vrije Universiteit Brussel, gives a possible explanation as to why the star is travelling so fast; "One theory is that Zeta Puppis has interacted with a binary or a multiple system in the past, and been thrown out into space at an incredible velocity".
- Using a network of 'nanosatellites' from the "BRIght Target Explorer" (BRITE) space mission, astronomers monitored the brightness of the surface of Zeta Puppis over a six-month period, and simultaneously monitored the behavior of its stellar wind from several ground-based professional and amateur observatories.
- Tahina Ramiaramanantsoa (PhD student at the Université de Montréal and member of the Centre de Recherche en Astrophysique du Québec; CRAQ) explains the authors' results: "The observations revealed a repeated pattern every 1.78 days, both at the surface of the star and in the stellar wind. The periodic signal turns out to reflect the rotation of the star through giant 'bright spots' tied to its surface, which are driving large-scale spiral-like structures in the wind, dubbed CIRs (Co-rotating Interaction Regions)."
- "By studying the light emitted at a specific wavelength by ionized helium from the star's wind," continued Tahina, "we clearly saw some 'S' patterns caused by arms of CIRs induced in the wind by the bright surface spots!". In addition to the 1.78-day periodicity, the research team also detected random changes on timescales of hours at the surface of Zeta Puppis, strongly correlated with the behavior of small regions of higher density in the wind known as "clumps" that travel outward from the star. "These results are very exciting because we also find evidence, for the first time, of a direct link between surface variations and wind clumping, both random in nature", comments investigating team member Anthony Moffat, emeritus professor at Université de Montréal, and Principal Investigator for the Canadian contribution to the BRITE mission.
- After several decades of puzzling over the potential link between the surface variability of very hot massive stars and their wind variability, these results are a significant breakthrough in massive star research, essentially owing to the BRITE nanosats and the large contribution by amateur astronomers. "It is really exciting to know that, even in the era of giant professional telescopes, dedicated amateur astronomers using off-the-shelf equipment in their backyard observatories can play a significant role at the forefront of science", says investigating team member Paul Luckas from the International Centre for Radio Astronomy Research (ICRAR) at the University of Western Australia. Paul is one of six amateur astronomers who intensively observed Zeta Puppis from their homes during the observing campaign, as part of the 'Southern Amateur Spectroscopy initiative'.
- The physical origins of the bright surface spots and the random brightness variations discovered in Zeta Puppis remain unknown at this point, and will be the subject of further investigations, probably requiring many more observations using space observatories, large ground-based facilities, and small telescopes alike.
• May 2016: The BRITE-Constellation has been successfully observing the night sky’s most luminous stars since late 2013. Over 300 stars have been studied during the course of 15 completed campaigns, with each star assigned to a PI and tied to a unique observation proposal. To date, data sets corresponding to the first 10 of these campaigns have been released to BRITE PIs. Within only a short time since the first data sets were released, notable scientific outputs have already been produced. Three papers have been published in refereed journals with many more in the pipeline. With a huge volume of data already being studied on the ground and with the capabilities of the constellation expanding all the time, the future looks bright for further discovery. 29)
- BRITE is a unique and stand-out mission in many ways. It is the first and only mission to conduct two-color spaceborne photometry, being critical for stellar pulsation mode identification (as observed pulsation frequencies and amplitudes will vary across measurement bands), which has already paid dividends in revealing first-time observed insights of stellar properties (Ref. 32). The fact that BRITE is a constellation enables uninterrupted and overlapping coverage of star fields, allowing the mission to resolve stellar pulsation modes with periods from scales of hours to months. The BRITE satellites are believed to be the first nanosatellites dedicated to astronomy, the first orbiting astronomy constellation of any size ever launched, and the first spacecraft at this scale to achieve arc-second level pointing.
- As a result of its many accomplishments, the mission has been a large success. The constellation produces a quality of output which meets and exceeds both requirements and expectations. Although BRITE-Constellation has already swollen to a size not dreamed of when it was first conceived, the mission continues to garner interest in participation from other nations. Attracted by the enticing nature of the science, the success of the transfer programs with Austria and Poland and the relatively low-entry cost, to date, six other nations have expressed interest in contributing additional satellites to the constellation. In anticipation of potential future expansion, discussion had taken place on how those satellites can best be used to further enhance the science as the addition of BRITE-Austria did years before. At the top of the list is a BRITE satellite capable of observing in the ultraviolet, an addition which would push this already highly valuable mission into even new territory.
- Observation targets are selected by the BRITE Executive Science Team (BEST), which is comprised of twelve voting members (four per member country) and six non-voting members. 30) Once per year BEST convenes to generate observation schedules and strategies (based on the evaluation of scientific merit of submitted target proposals), review mission status, and provide overall management and control of the mission. Spacecraft operations, which are heavily automated, are managed part-time by small engineering teams residing at each of the respective mission control centers.
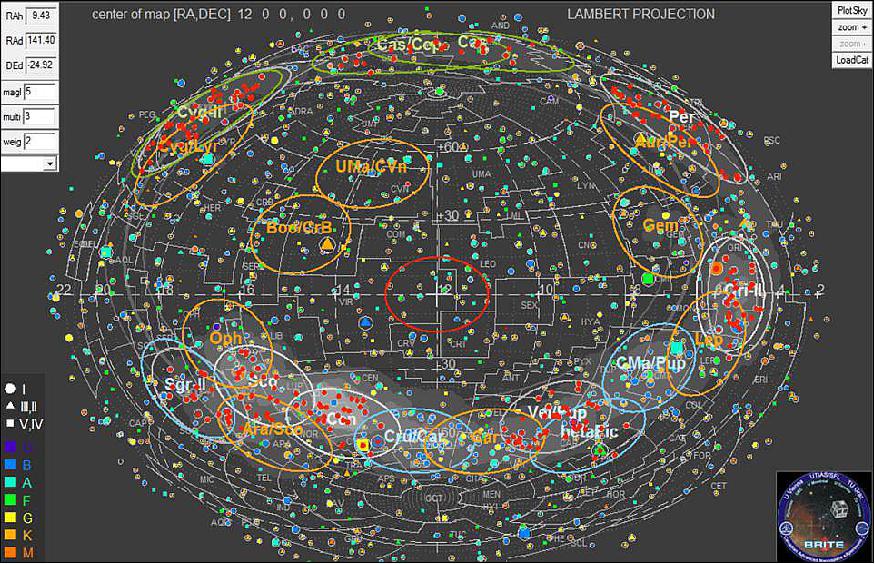
- Spanning the two and a half years since the BRITE constellation began nominal science operations, fifteen observation campaigns have been executed. A Lambert projection of the night sky,illustrating the star fields observed (as well as those planned in the near future) by the BRITE constellation is shown in Figure 12, where the ovals represent the field of view of the imager at each field. Within the figure, it is evident that the majority of the observed fields are clustered in a single plane. This is not a coincidence, as the greatest density of stars (which include BRITE’s target luminous stars) lie within the Milky Way’s galactic plane.
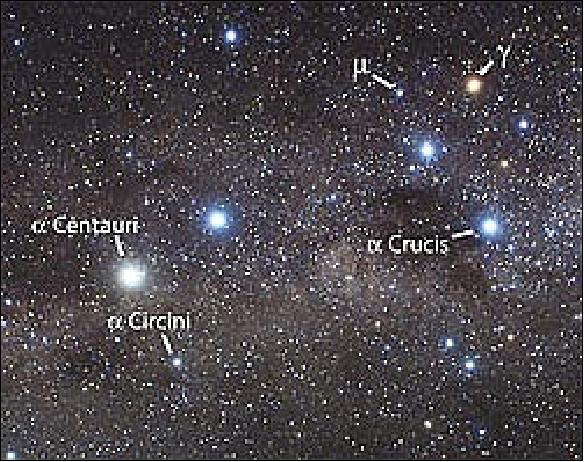
• Feb. 5, 2016: The BRITE Constellation of five nanosatellites is operational in 2016. — The constellation is revealing new information about a well-studied star, Alpha Circini. A data analysis of the BRITE Constellation Team shows a behavior in this star that has not been observed before according to Werner Weiss from the University of Vienna, Austrian Principal Investigator for BRITE and lead author of the paper. The ”BRITE Constellation shows complex behavior in Alpha Cir due to both rotation and pulsation. Moreover, that behavior is different when observed in different colors. This result clearly demonstrates the power of BRITE-Constellation and the unique science that is possible using these tiny two-color precision instruments in space.” 31) 32)
- The BRITE-Constellation is a coordinated mission of five nanosatellites in LEO, each hosting an optical telescope of 3 cm aperture feeding an uncooled CCD, and observing selected targets in a 24º FOV. Each nanosatellite is equipped with a single filter; three have a red filter (~ 620 nm) and two have a blue filter (central wavelength (~ 420 nm). The satellites have overlapping coverage of the target fields to provide two-color, time-resolved photometry.
- The five nanosatellites, each of ~7 kg, are designated as: BRITE-Austria and UniBRITE (Austria), BRITE-Lem and BRITE-Heweliusz (Poland) and BRITE-Toronto (Canada). A sixth nanosat, BRITE-Montreal, did not detach from its launch vehicle.
- The BRITE data are so valuable to astronomers due to their multi-colored observation. For stars, color and temperature go hand-in-hand. Having the ability to examine stars in different colors with data taken every few minutes for up to six months is providing new insights into their inner workings.
- Using these precision instruments, the BRITE-Constellation’s mission is to perform a survey of the most luminous stars in the Earth’s sky via a branch of astronomy called asteroseismology – literally, the study of “starquakes”. Typically, massive and short-lived, these stars dominate the ecology of the Universe and are responsible for seeding the interstellar medium with the “heavy” elements critical for the formation of planetary systems and organic life. In short, BRITE studies classes of stars that, billions of years ago, made life on Earth possible.
- With an apparent magnitude of 3.19, Alpha Cir is the brightest star in the southern constellation Circinus and belongs to the class of stars known as rapidly oscillating Ap stars. The star in question was observed by four of the BRITE satellites from March to August 2014 and will be observed again in 2016. It is hoped, that these new observations will provide both a better understanding of its complex behavior and a chance to confirm a new oddity about this already peculiar star; that its speed of rotation is decelerating.
• On Feb. 25, 2015 the BRITE-Austria and UniBRITE nanosatellites were 2 years on orbit. BRITE-Austria is operated from Graz while UniBRITE is operated from Toronto. 33)
- BRITE-Constellation is the world‘s first nanosatellite constellation dedicated to astronomy. Five components of BRITE-Constellation are operational.
• Oct. 2014: Of the five operational spacecraft, UniBRITE and BRITE-Toronto are operated by UTIAS/SFL, from the Toronto Earth station. BRITE-Austria is operated by the Technical University of Graz and the Polish BRITEs are operated by the Polish Space Research Center and the Copernicus Astronomical Center. 34)
- Due to the fact that UniBRITE and BRITE-Toronto are based on SFL’s GNB (Generic Nanosatellite Bus), with which SFL has considerable on-orbit experience, commissioning of the core hardware complement was conducted at an accelerated pace. Within two weeks UniBRITE had commissioned everything but the payload and fine pointing hardware/algorithms. As one of the first BRITE spacecraft in orbit, a few notable hurdles were encountered and overcome before regular science operations were achieved in Sept 2013. — By the launch of BRITE-Toronto in June 2014, operations were running very smoothly and, tellingly, within eight days of the launch of BRITE-Toronto it had been fully commissioned and was collecting science data (Ref. 34).
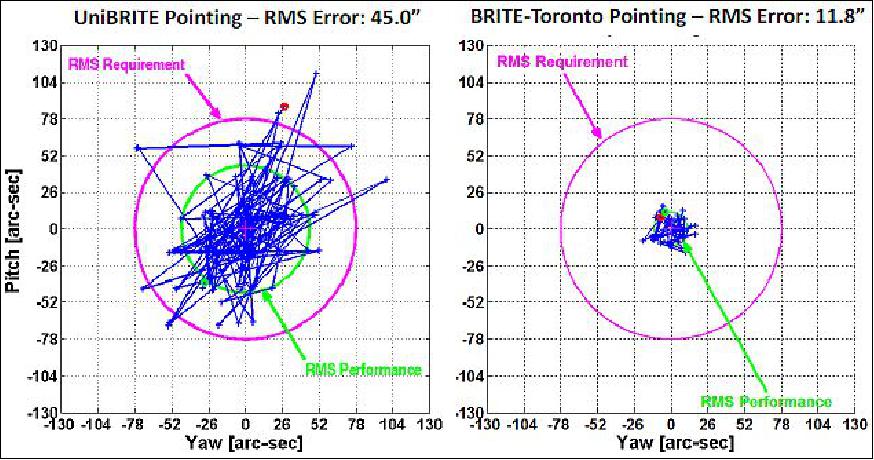
- Fine Pointing Stability and Accuracy: The performance of fine-pointing on BRITE is typically assessed using high cadence star-field images taken by the payload. Shown in Figure 14 is the motion of the centroid of a stellar PSF, over a single 15-minute observation, for both UniBRITE and BRITE-Toronto. In each plot the red circle represents the 78” requirement and the green circle the RMS error. Clearly, even for UniBRITE with the AA-MST, performance (45”) is well within requirements, and quite consistent with the simulation results. BRITE-Toronto, with the ST-16 startracker, over a similar time frame is almost four times better than UniBRITE, having RMS performance of 12”.
- BRITE not only needs to point stably during an observation, but also over the span of several months as the target is lost and reacquired. To assess pointing performance over a longer period, BRITE instrument scientist Rainer Kuschnig of the University of Vienna, compiled several weeks of UniBRITE and BRITE-Toronto data and found the long-term RSS values of the standard deviations in each axis to be 52” for UniBRITE and 15” for BRITE-Toronto. Hence, in both cases, from field acquisition to reacquisition, the spacecraft is able to return the stars to the same set of pixels, and the observed pointing stability is significantly better than the requirement.
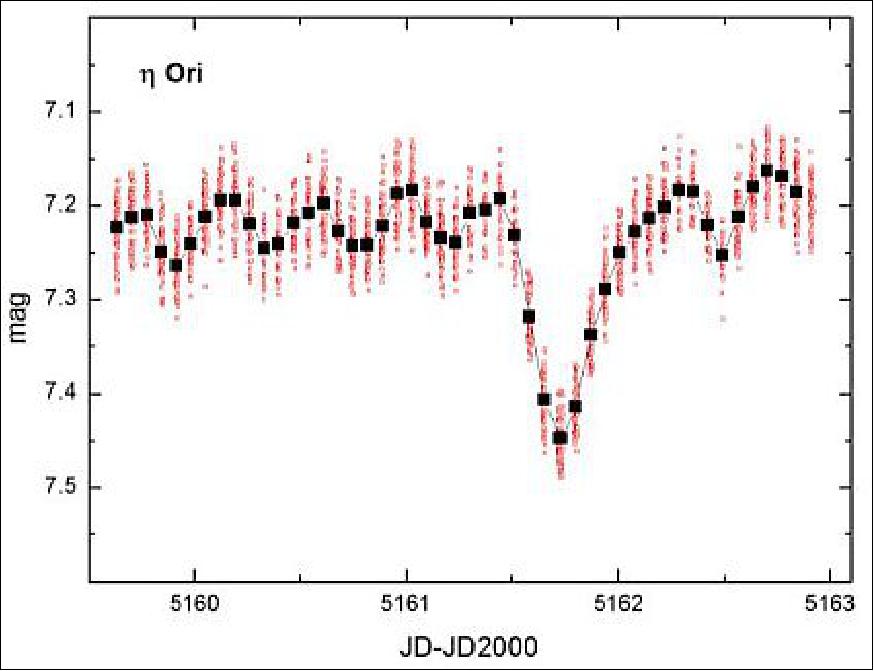
• UniBRITE commenced routine science observations of the Orion star-field in October 2013. Starting in December, BRITE-Austria joined UniBRITE on the campaign providing the mission’s first two-color photometric data. Conveniently, in late 2013, MOST (Microvariability and Oscillations of STars) was also observing Eta-Orionis (a quadruple system with an eclipsing binary pair) and, for a time, all three spacecraft were performing simultaneous observations. Through the simultaneous observations with MOST, the team was able to confirm that, to first order, the quality of the BRITE data was as good as expected. A minimally post-processed light-curve of Eta-Orionis, taken by UniBRITE and with a binary transit clearly evident, is shown in Figure 15 (Ref. 34).
• Summer 2014: The commissioning of the Austrian BRITEs, being the first to launch, was complete by October 2013, and since then they have been routinely collecting science data, each orbit. The first field investigated, from October 2013 to March 2014, was Orion. Once Orion had set, the spacecraft moved on to observing the field Centaurus, while also observing secondary target field Sagittarius in tandem (Ref. 10).
- While commissioning of such a cutting-edge mission met with some hurdles, all now have been cleared, resulting in a quality of science generation which meets and exceeds both requirements and expectations. Although BRITE-Constellation has already swollen to a size not dreamed of when it was first conceived, the mission continues to garner interest in participation from other nations. Attracted by the enticing nature of the science, the success of the transfer programs with Austria and Poland and the relatively low-entry cost, to date, at least six other nations have expressed interest in contributing additional satellites to the constellation.
• Feb. 2014: The BRITE constellation is the world‘s first nanosatellite constellation dedicated to an astronomy mission. 35)
- The first 3 members of the BRITE constellation are on orbit, operating nominally
- The planned constellation will be completed this year
- Scientific & mission requirements fully met
- Scientific data collection under way.
• Activities in the period summer – fall 2013 (Ref. 35).
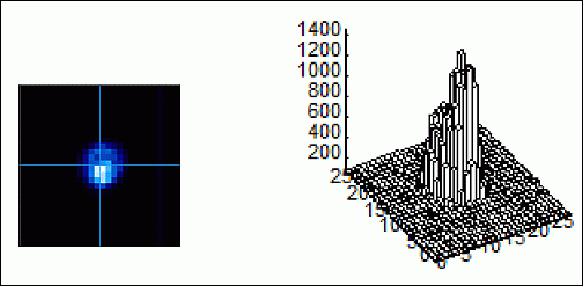
- Payload characterization (TUGSAT-1): Verification of PSF (Point Spread Function), CCD sensitivity, identifications of hot pixels on CCD (removal by software).
- Attitude control system optimization (UniBRITE)
- Reduction of commissioning time
- Fine pointing achieved in November 2013, performance better than specification
- Science data collection since November.
• October 1, 2013: Calibration of attitude sensors of BRITE-Austria is ongoing to increase the fine pointing performance. In addition payload characterization and hot pixel variations of the instrument's CCD sensor are investigated (Ref. 39).
Arc-minute level pointing with small satellites is a challenging but a demonstrated objective. This level of precision is made possible thanks to recent advancements in star tracker technology. The AeroAstro MST (Miniature Star Tracker) as well as other high performance sensors tailored to nanosatellites, are enabling fine determination for small satellite missions.
Another important technology enabling fine pointing of nanosatellites are reaction wheels. Jitter caused by torque output oscillation and to a lesser extent, rotor imbalance can cause significant pointing degradation. The Sinclair-SFL reaction wheels have been shown to produce very low amounts of jitter.
Small satellites are very susceptible to disturbance torques. With small moments of inertia, a given torque can cause significant angular disturbance. This susceptibility can be mitigated by the use of a high bandwidth state estimator and controller. It is also advisable to estimate the disturbances and apply the appropriate correction to the state estimator and controller a priori.
The first two BRITE constellation nanosatellites are currently on orbit, commissioned, and are now operationally tasked to carry out their science objectives. The novel, high-performance attitude subsystem design of the generic nanosatellite bus, of which the BRITE mission is based on, has proven to be successful in arc-minute level pointing.
• In Sept. 2013, UniBRITE and BRITE-Austria have started to observe stars in the Orion constellation. While testing and optimization efforts are still ongoing science data are also collected regularly. In Figure 16, the exposure time was set to 1 second. The outer circle marks the unvignetted field of view of the instrument which has has a diameter of about 24º.
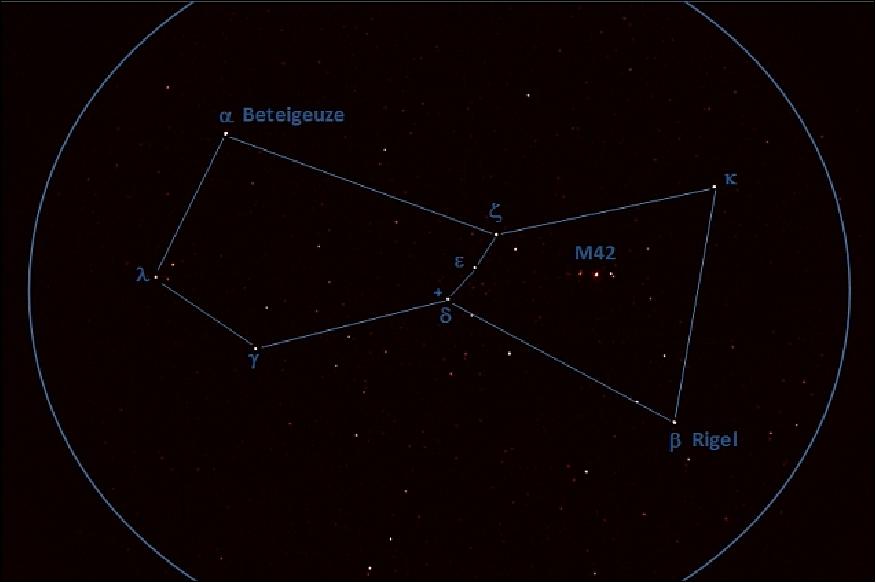
• In September 2013, the commissioning of BRITE-Austria is not yet completed, as the fine tuning and in-orbit calibration of sensor parameters, as well as performance characterization of the instrument is still ongoing. 36)
- Nevertheless, the ground station network and distributed software concept has already been used and validated. On the one hand, contacts to UniBRITE were successfully established from Graz, on the other hand during a breakdown of the ground station in Graz, the communication with BRITE-Austria was commanded through the ground station in Warsaw/Poland.
- Furthermore, during commissioning it was successfully shown, that the station in Graz is able to run autonomously and the remote access enables operators to monitor and control the ground station’s and satellite’s behavior although off-site.
• July 15, 2013: BRITE-Austria is currently performing the transition to fine pointing. The overall satellite is in a good health state and is looking forward to start observations of bright stars (Ref. 39).
• On March 28, 2013, the UniBRITE nanosatellite of the University of Vienna experienced a very close encounter with OSCAR-15 [aka UoSat-4, a microsatellite of SSTL which was launched on January 22, 1990 as a secondary payload to SPOT-2 of CNES from Kourou. OSCAR-15 experienced an on-board electronics failure shortly after launch, and is not operational anymore]. The UniBRITE project team experienced some anxious moments during the predicted close flyby of OSCAR-15. 37)
• March 23, 2013: After successful detumbling the TUGSat-1 spacecraft was put into coarse pointing mode. During the 404th orbit the first star image was taken by the scientific instrument (telescope) in coarse 3-axis pointing. The first star image showing Delta Corvus B9V (magnitude 2.95) was downloaded and analyzed by the experts from the Institute of Astrophysics in Vienna. Initial assessment of the payload performance indicates that the specifications are met. 38)
• March 5, 2013: TUGSAT-1 completed its 100th orbit. All subsystems tested so far show excellent health status. At present the attitude control system is checked out. Detumbling of the spacecraft is planned for the next days.
• A successful contact with the TUGSat-1 (BRITE-Austria) nanosatellite was established during the first orbital pass over Graz (3 hours after launch). This constituted the start of the commissioning phase of the satellite which is expected to last for 3 months. 39)
Sensor Complement (Photometer)
The objective is to examine the apparently brightest stars in the sky for variability using the technique of precise differential photometry in time scales of hours and more. The constellation of four nanosatellites is divided into two pairs, with each member of a pair having a different optical filter. The requirements call for observation of a region of interest by each nanosatellite in the constellation for up to 100 days or longer. 40)
Photometer
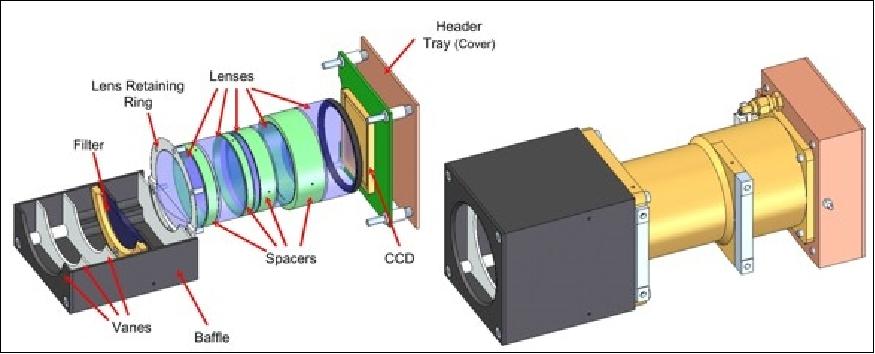
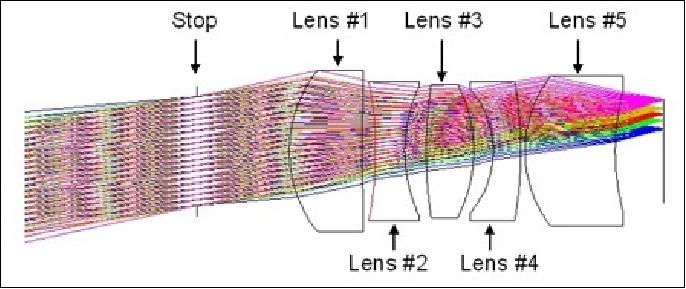
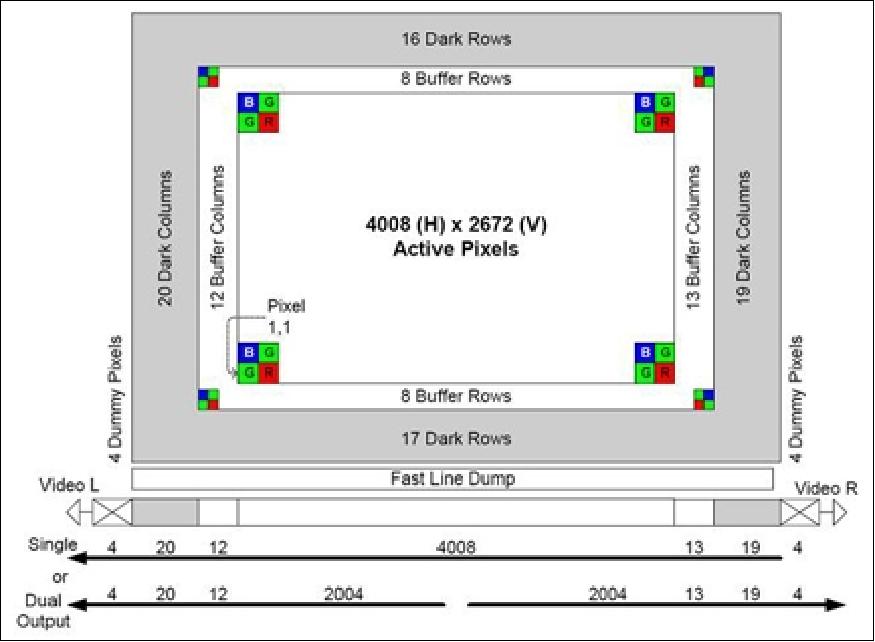
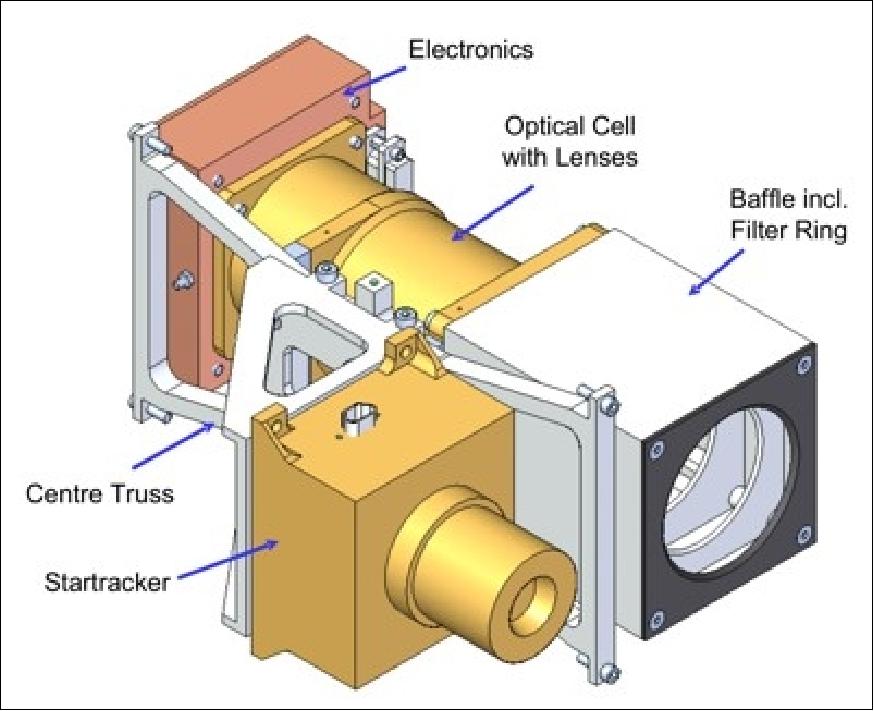
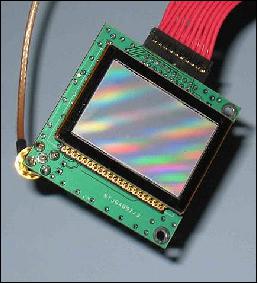
The science payload of each nanosatellite consists of a five-lens telescope with an aperture of 30 mm and the interline transfer progressive scan CCD detector KAI 11002-M from Kodak with 11 M pixels, along with a baffle to reduce stray light. The optical elements are housed inside the optical cell and are held in place by spacers. The photometer has a resolution of 26.52 arcsec/pixel and a field-of-view of 24º. The mechanical design for the blue and for the red instrument is nearly identical; only the dimensions of the lenses are different (Ref. 6) and Ref. 7).
The effective wavelength range of the instrument is limited in the red by the sensitivity of the detector and in the blue by the transmission properties of the glass used for the lenses. The filters were designed such that for a star of 10,000 K (average temperature for all BRITE target stars) both filters would generate the same amount of signal on the detector. The blue filter covers a wavelength range of 390-460 nm and the red filter 550-700 nm; both are assumed to have a maximum transmission of 95%.
Image size | 37.25 mm x 25.70 mm |
No of pixels | 4008 x 2672 |
Pixel size | 9.0 µm x 9.0 µm |
Peak quantum efficiency | 50% |
Full well charge (saturation signal) | 60,000 e- |
Dark current (at 20ºC) | 4 e-/s/pixel |
Power consumption | 1 W |
The photometer instrument has a mass of ≤ 0.9 kg and a power consumption of ≤ 3.5 W. The instrument uses a custom set of electronics to operate the imager. The electronics include four A/D converters (14 bit) to convert the analog pixel values, and 32 MB of memory to temporarily hold a full frame image. The imager and memory timing and signals are being controlled using a CPLD (Complex Programmable Logic Device).
Ground Segment
All participants in the BRITE constellation will have their own ground station. 41)
• Graz, Austria, TUG (Mission Control for BRITE-Austria and UniBRITE)
• TUV (Technical University Vienna), a second station is located at the ITC of TUV
• Toronto, Canada, UTIAS/SFL (Mission Control for BRITE/CanX-3). A ground station at UTIAS-SFL has already been established since early 2003. It has served as a technical template design and concept for two other ground stations (one in Vienna and one in Vancouver) which communicate with the MOST satellite. Furthermore, this station has been used now regularly for broadcasting with three other satellites in orbit. This well-proven, equipement is also the baseline for BRITE-Constellation ground-space communications. At UTIAS/SFL , an additional ground station will be installed in 2011 which will also support BRITE-Constellation operations.
• Warsaw, Poland (Mission Control for BRITE-PL). The ground station is located at the CAC (Nicolaus Copernicus Astrophysical Center) in Warsaw.
All stations will track and collect data from all BRITE nanosatellites.
• Distributed automatic ground station operations
• Science teams can retrieve verified raw data from servers.
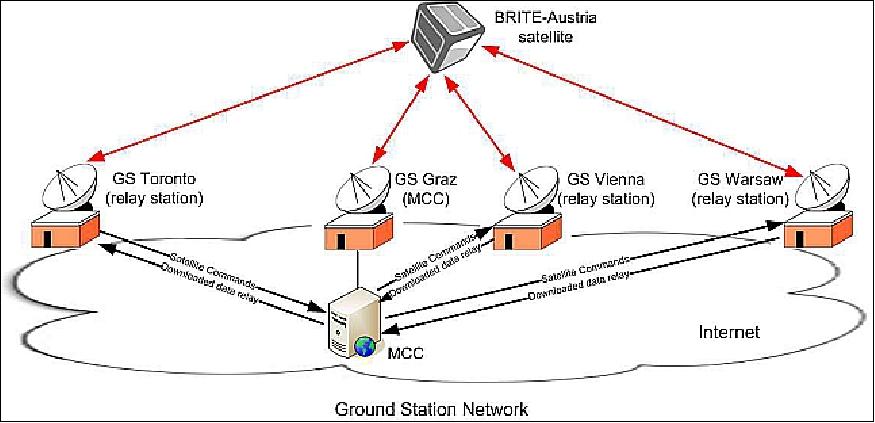
Ground Station Network: For operating the BRITE constellation, a ground station network is used. The advantages of the network are the increased availability and redundancy (Ref. 42).
The general operations concept foresees that each master ground station is in charge of its own satellite(s) and tracks other satellites only in case of unavailability of the correspondent master station or in case of emergency.
The master station is responsible for its own satellite(s) and is the only one actually controlling the spacecraft. If other stations attempt contacting a satellite, they normally act as relay stations, up-linking incoming commands from the master station and forwarding downlinked data to the master station. In case of failure of a master station, its duties can be temporarily taken over by another station in the network.
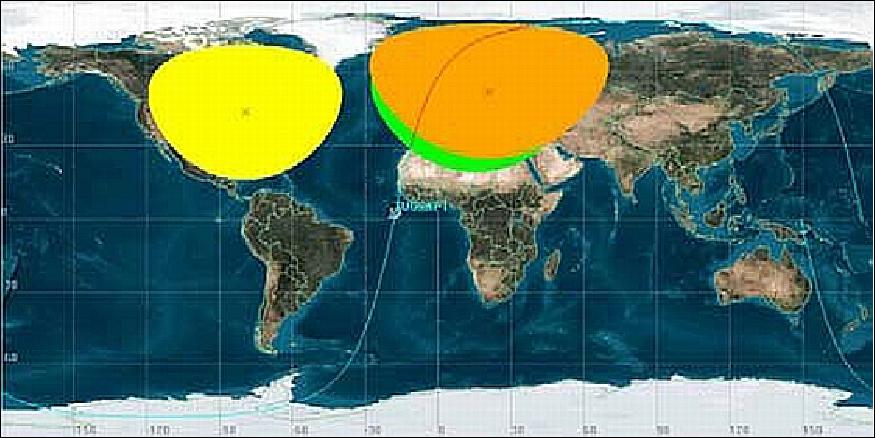
An example of ground station network operations and data flow for BRITE-Austria is shown in Figure 24. While all stations can establish contact with the satellite, the entire data flow is handled by the Graz ground station as the satellite’s master station. The data flow is handled by a distributed ground software concept.
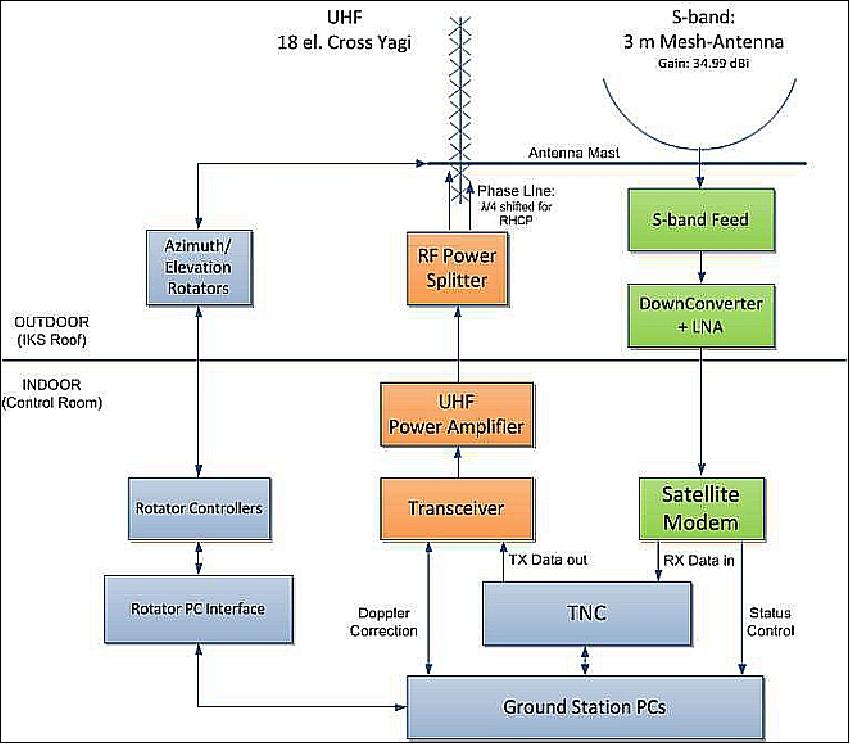
BRITE-Austria ground station: A major driver for the ground station design is the amount of science data to be downloaded. For BRITE-Austria, the data amount to be downloaded is up to 10 MByte/day. The contact times with the satellite are limited to about 10-12 minutes/pass and a total contact time of roughly 1 hour/ day. A downlink data rate of 32 kbit/s allows to download the daily data in about 42 minutes, providing sufficient margins. 42)
In addition, the ground station in Graz serves as mission control for BRITE-Austria. It is responsible for the spacecraft and shall guarantee data integrity and storage of raw satellite data.
The ground station antennas are a 3 m parabolic meshed antenna for S-band (35 dBi gain) and an 18 element, circular polarized cross-Yagi antenna for UHF (16 dBi gain). Both antenna are mounted on the same tower and are controlled by the same azimuth and elevation rotators, allowing to achieve the same tracking performance for uplink and downlink.
References
1) A. F. J. Moffat, W. W. Weiss, S. M. Rucinski, R. E. Zee, M. H. van Kerkwijk, S. W. Mochnacki, J. M. Matthews, J. R. Percy, P. Ceravolo, C. C. Grant, “The Canadian BRITE NanoSatellite Mission,” Proceedings of ASTRO 2006 - 13th CASI (Canadian Aeronautics and Space Institute) Canadian Astronautics Conference, Montreal, Quebec, Canada, April 25-27, 2006, URL: https://web.archive.org/web/20110907210214/http://www.utias-sfl.net/docs/brite-astro-2006.pdf
2) N. C. Deschamps, C. C. Grant, D. G. Foisy, R. E. Zee, A. F. J. Moffat, W. W. Weiss, ”The BRITE Space Telescope: A Nanosatellite Constellation for High-Precision Photometry of Bright Stars,” Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-X-1, URL: https://web.archive.org/web/20100827082418/http://www.utias-sfl.net:80/docs/brite-ssc-2006.pdf
3) N. C. Deschamps, C. C. Grant, D. G. Foisy, R. E. Zee, A. F. J. Moffat, W. W. Weiss, ”The BRITE Space Telescope: Using a Nanosatellite Constellation to Measure Stellar Variability in the Most Luminous Stars,,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.2.7, URL: https://arc.aiaa.org/doi/pdf/10.2514/6.IAC-06-B5.2.07
4) O. Koudelka, G. Egger, B. Josseck, N. Deschamps, C. Grant, D. Foisy, R. Zee, W. Weiss, R. Kuschnig, A. Scholtz, W. Keim, “TUGSAT-1 / BRITE-Austria - The First Austrian Nanosatellite,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.2.06, URL: https://arc.aiaa.org/doi/abs/10.2514/6.IAC-06-B5.2.06
5) https://web.archive.org/web/20050306055024/http://www.utias-sfl.net/nanosatellites/CanX3/
6) http://www.brite-constellation.at/
7) http://www.tugsat.tugraz.at/project/mission
8) O. Koudelka, G. Egger, B. Josseck, N. Deschamps, C. Grant, D. Foisy, R. Zee, W. Weiss, R. Kuschnig, A. Scholtz, W. Keim, “TUGSAT-1 / BRITE-Austria - The First Austrian Nanosatellite,” Acta Astronautica, Vol. 64, 2009, pp. 1144-1149
9) Otto F. Koudelka, “The BRITE Nanosatellite Constellation,” Proceedings of the 50th Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2013, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2013/tech-61E.pdf
10) Karan Sarda, C. Cordell Grant, Monica Chaumont, Seung Yun Choi, Bryan Johnston-Lemke, Robert E. Zee, “On-Orbit Performance of the Bright Target Explorer (BRITE) Nanosatellite Astronomy Constellation,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 2-7, 2014, paper: SSC14-XII-6, URL: http://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=3077&context=smallsat
11) Piotr Orleanski, Rafał Graczyk, Mirosław Rataj, Aleksander Schwarzenberg-Czerny, Tomasz Zawistowski, Robert E.Zee, “BRITE-PL – the first Polish scientific satellite,” Proceeding of the 4th Microwave & Radar Week, MRW-2010, Vilnius, Lithuania, June 14-18, 2010
12) Otto Koudelka, Werner Weiss, “BRITE-Austria, TUGSat-1,” UN/Austria/ESA Symposium on Small Satellite Programs for Sustainable Development: Payloads for Small Satellite Programs, Sept. 21-24, 2010, Graz, Austria
13) “The first Polish scientific satellite BRITE-PL will help in understanding the inner structure of brightest stars in our galaxy,” URL:
://www.sciencenewsline.com/space/2010052400006625.html
14) “Canada adds two satellites to BRITE Constellation,” January 19, 2011, URL:
https://web.archive.org/web/20110209163144/http://www.utias-sfl.net/RecentNews/news-20110119.html
15) http://www.tugsat.tugraz.at/tugsat-1
16) “Der erste österreichische Satellit - TUGSAT-1 / BRITE-Austria,” URL: http://www.tugsat.tugraz.at/info/press/press-release
17) Otto F. Koudelka, “The BRITE Nanosatellite Constellation,” Proceedings of the 49th Session of UNCOPUOS-STSC (UN Committee on the Peaceful Uses of Outer Space-Scientific and Technical Subcommittee), Vienna, Austria, Feb. 6-17, 2012, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2012/tech-47E.pdf
18) F. M. Pranajaya, Robert E. Zee, “Generic Nanosatellite Bus for Responsive Mission,” 5th Responsive Space Conference, Los Angeles, CA, USA, April 23-26, 2007, AIAA-RS5 2007-5005, URL: https://web.archive.org/web/20150607212939/http://www.responsivespace.com/Papers/RS5/SESSION%20PAPERS/SESSION%205/5005_PRANAJAYA/5005P.pdf
19) Guy de Carufel, “Assembly, Integration and Thermal Testing of the Generic Nanosatellite Bus,” Thesis submitted for the degree of Master of Applied Science, University of Toronto, 2009, URL: https://tspace.library.utoronto.ca/bitstream
/1807/18271/1/deCarufel_Guy_200911_MASc_thesis.pdf
20) D. Sinclair, C. C. Grant, R. E. Zee, “Developing, Flying and Evolving a Canadian Microwheel Reaction Wheel - Lessons Learned,” Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, Canada, May 4-6, 2010
21) D. Sinclair, C. C. Grant, R. E. Zee, “Enabling Reaction Wheel Technology for High Performance Nanosatellite Attitude Control,” Proceedings of the 21st Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 13-16, 2007, SSC07-X-3, URL: http://www.sinclairinterplanetary.com/SSC07-X-3.pdf
22) Bryan Johnston-Lemke, Karan Sarda, Cordell C. Grant, Robert E. Zee, “BRITE-Constellation: On-Orbit Attitude Performance of a Nanosatellite Telescope,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-C1.1.4
23) “PSLV - C20 successfully launches Indo-French satellite SARAL and six other commercial payloads into the orbit,” ISRO, Feb. 25, 2013, URL: http://www.isro.org/pslv-c20/c20-status.aspx
24) “TUGSAT-1/BRITE-Austria,” TUG, Feb. 25, 2013, URL: http://www.tugsat.tugraz.at/
25) “Nanosatellite Launch Service 8,” UTIAS/SFL, Feb. 2013, URL:
https://web.archive.org/web/20140502053003/https://www.utias-sfl.net/NLS-8/?m=201302
26) O. Koudelka, R. Kuschnig, M. Wenger, ”Operational Experience with a Nanosatellite Science Mission,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B4.3.6, URL: https://iafastro.directory/iac/proceedings
/IAC-18/IAC-18/B4/9-GTS.5/manuscripts/IAC-18,B4,9-GTS.5,13,x48026.pdf
27) ”Spots on Supergiant Star Drive Spirals in Stellar Wind,” Royal Astronomical Society, 25 Oct. 2017, URL: https://www.ras.org.uk/news-and-press
/3058-spots-on-supergiant-star-drive-spirals-in-stellar-wind
28) Tahina Ramiaramanantsoa, Anthony F. J. Moffat, Robert Harmon, Richard Ignace, Nicole St-Louis, Dany Vanbeveren, Tomer Shenar, Herbert Pablo, Noel D. Richardson, Ian D. Howarth, Ian R. Stevens, Caroline Piaulet, Lucas St-Jean, Thomas Eversberg, Andrzej Pigulski , Adam Popowicz, Rainer Kuschnig ,Elżbieta Zocłońska, Bram Buysschaert, Gerald Handler, Werner W. Weiss, Gregg A. Wade, Slavek M. Rucinski ,Konstanze Zwintz, Paul Luckas, Bernard Heathcote, Paulo Cacella, Jonathan Powles, Malcolm Locke, Terry Bohlsen, André-Nicolas Chené, Brent Miszalski, Wayne L. Waldron, Marissa M. Kotze, Enrico J. Kotze, Torsten Böhm, ”BRITE-Constellation high-precision time-dependent photometry of the early-O-type supergiant Zeta Puppis unveils the photospheric drivers of its small- and large-scale wind structures,” Monthly Notices of the Royal Astronomical Society (MNRAS), stx2671, https://doi.org/10.1093/mnras/stx2671, Published: 13 October 2017
29) Karan Sarda, C. Cordell Grant, Robert E. Zee, ”Three stellar years (and counting) of precision photometry by the BRITE astronomy constellation,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, URL: http://arc.aiaa.org/doi/book/10.2514/MSPOPS16
30) , W. W. Weiss, S. M. Rucinski, A. F. J. Moffat, A. Schwarzenberg-Czerny, O.F. Koudelka, C. C. Grant, R. E. Zee, R. Kuschnig, St. Mochnacki, J. M. Matthews, P. Orleanski, A. Pamyatnykh, A. Pigulski, J. Alves, M. Guedel, G. Handler, G. A. Wade, K. Zwintz, CCD, Photometry Tiger Teams, ”BRITE-Constellation: Nanosatellites for Precision Photometry of Bright Stars, ” Publications of the Astronomical Society of the Pacific, Vol. 126, No. 940, June 2014, pp. 573-585, URL: http://arxiv.org/pdf/1406.3778v1.pdf
31) ”BRITE-Constellation Sees Stars in a New Light,” UTIAS/SFL, Feb. 5, 2016, URL: http://utias-sfl.net/?p=2391
32) W. W. Weiss, H.-E. Fröhlich, A. Pigulski, A. Popowicz, D. Huber, R. Kuschnig, A. F. J.Moffat, J. M. Matthews, H. Saio, A. Schwarzenberg-Czerny, C. C. Grant, O. Koudelka, T. Lüftinger, S. M. Rucinski, G. A. Wade, J. Alves, M. Guedel, G. Handler, St. Mochnacki, P. Orleanski, B. Pablo, A. Pamyatnykh, T. Ramiaramanantsoa, J. Rowe, G. Whittaker, T. Zawistowski, E. Zocłonska, K. Zwintz, ”The roAp star α Circini as seen by BRITE-Constellation,” Astronomy & Astrophysics manuscript No. alCirArchiv (@ESO 2016), January 20, 2016, URL: http://arxiv.org/pdf/1601.04833v1.pdf
33) O. Koudelka, M. Unterberger, P. Romano, W. Weiss, R. Kuschnig, “BRITE Constellation – 2 Years in Orbit,” 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL:
http://www.unoosa.org/pdf/pres/stsc2015/tech-40E.pdf
34) C. Cordell Grant, Karan Sarda, Monica Chaumont, Robert E. Zee, “On-Orbit Performance of the BRITE Nanosatellite Astronomy Constellation,” Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B4.2.3
35) O. Koudelka, M. Unterberger, P. Romano, W. Weiss, R. Kuschnig, “BRITE – One Year in Orbit,” Proceedings of the 51st Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2014, URL: http://www.unoosa.org/pdf/pres/stsc2014/tech-45E.pdf
36) Manuela Unterberger, Patrick Romano, Michael Bergmann, Rainer Kuschnig, Otto Koudelka, “Experience in Commissioning and Operations of the BRITE-Austria Nanosatellite Mission,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B6.2.9
37) “UniBRITE nach Schrecksekunde in bester Verfassung!,” March 28, 2013, URL: http://medienportal.univie.ac.at/uniview/forschung
/detailansicht/artikel/unibrite-nach-schrecksekunde-in-bester-verfassung/
38) “23 March 2013 - Historic First Picture from TUGSAT-1,” TU Graz, URL: http://www.tugsat.tugraz.at/news-1
39) http://www.tugsat.tugraz.at/news-1
40) A. Kaiser, S. Mochnacki, W. W. Weiss, “BRITE-Constellation: Simulation of Photometric Performance,” Communications in Asteroseismology, Volume 152, January, 2008
41) Alexander M. Beattie, Daniel D. Kekez, Andrew Walker, Robert E. Zee, “Evolution of Multi-Mission Nanosatellite Ground Segment Operations,” Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1292362-Paper-001.pdf
42) Patrick Romano, Manuela Unterberger, Otto Koudelka, “BRITE-Austria Ground Segment and Distributed Operations Concept,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B4.3.9
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top