Argos DCS (Data Collection System)
EO
Ocean colour instruments
Cloud profile and rain radars
Atmosphere
The Argos worldwide Data Collection System (DCS) is a global satellite-based system that collects, processes and disseminates environmental data from fixed and mobile platforms around the world. The Argos system was created in 1978 collaboratively by the French Space Agency (CNES), the National Aeronautics and Space Administration (NASA) and the National Oceanic and Atmospheric Administration (NOAA). There are currently several other international space agencies also actively participating in the Argos system which is currently operated and maintained by Collecte Localisation Satellites (CLS), a subsidiary of CNES.
Quick facts
Overview
| Mission type | EO |
| Agency | CNES, NOAA, ISRO, EUMETSAT |
| Mission status | Operational (nominal) |
| Launch date | 13 May 1998 |
| Measurement domain | Atmosphere, Ocean, Land |
| Measurement category | Atmospheric Temperature Fields, Multi-purpose imagery (ocean), Multi-purpose imagery (land), Vegetation, Atmospheric Humidity Fields, Ocean topography/currents, Atmospheric Winds |
| Measurement detailed | Atmospheric pressure (over sea surface), Land surface imagery, Vegetation type, Vegetation Cover, Atmospheric specific humidity (column/profile), Land surface temperature, Atmospheric stability index, Volcanic ash, Ocean dynamic topography, Atmospheric pressure (over land surface) |
| Instrument type | Ocean colour instruments, Cloud profile and rain radars, Other, Atmospheric chemistry, Data collection |
| CEOS EO Handbook | See Argos DCS (Data Collection System) summary |
Related Resources
Argos DCS (Data Collection System)
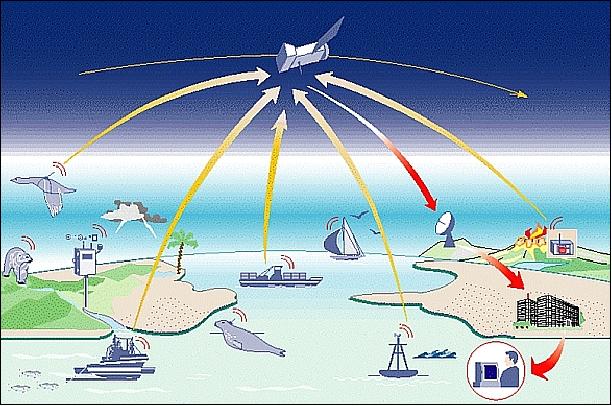
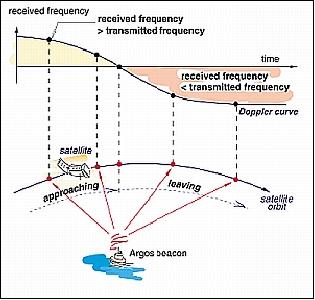
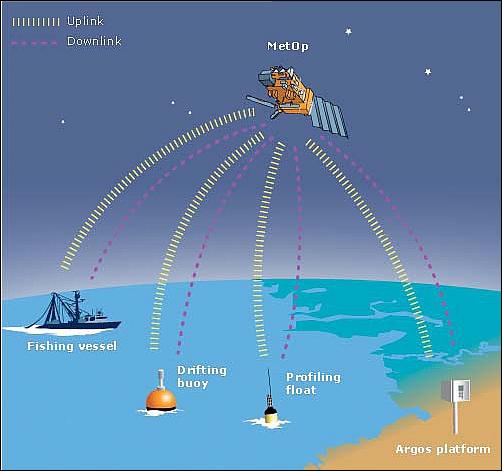
Argos is a global spaceborne data collection and location system (DCS) dedicated to studying and protecting Earth's environment. The objective of the Argos DCS is to locate in the ground segment fixed and mobile platforms and collect environmental data from them. The system consists of in-situ data collection platforms in the ground segment equipped with sensors and transmitters and the Argos DCS instrument aboard polar orbiting weather satellites. What makes the DCS unique is the fact that a moving satellite platform allows for locating an in-situ platform using Doppler shift calculations. This positioning capability permits applications such as monitoring drifting ocean buoys and studying wildlife migration paths.
Argos is a global spaceborne data collection and location system (DCS) dedicated to studying and protecting Earth's environment. The objective of the Argos DCS is to locate in the ground segment fixed and mobile platforms and collect environmental data from them. The system consists of in-situ data collection platforms in the ground segment equipped with sensors and transmitters and the Argos DCS instrument aboard polar orbiting weather satellites. What makes the DCS unique is the fact that a moving satellite platform allows for locating an in-situ platform using Doppler shift calculations. This positioning capability permits applications such as monitoring drifting ocean buoys and studying wildlife migration paths.
History: The Argos system was created in 1978 by the French Space Agency (CNES), the National Aeronautics and Space Administration (NASA) and the National Oceanic and Atmospheric Administration (NOAA), originally as a scientific tool for collecting and relaying meteorological and oceanographic data around the world. In 1986, CNES created a subsidiary, CLS, to operate, maintain and commercialise the system. Today, CLS is the exclusive provider of Argos satellite telemetry services for scientific and environmental applications. 1) 2) 3) 4)
The Argos system package has been flown on all TIROS-N family satellite of NOAA since 1978. The space segment comprises the NOAA POES satellites and more recently the ADEOS-II spacecraft of JAXA, and the EUMETSAT MetOp spacecraft in orbit.
Currently, several other international space agencies also actively participate in the Argos system including European Organization of the Exploitation of Meteorological Satellites (EUMETSAT), the Indian Space Research Organization (ISRO) and others.
CLS (Collecte Localisation satellite) has been the exclusive provider of Argos services for scientific and environmental applications since 1986.
CLS develops state-of-the-art processing tools and services for distributing high value-added data to Argos users. In addition, the CLS renowned user services are available around the world, to serve Argos users in their language and their time zone. CLS is available to help Argos users from before they open their program and on a day-to-day basis once their program is operational.
CLS has been providing satellite-based solutions for location and environmental data collection for nearly 30 years. Initially founded by CNES (the French Space Agency) and IFREMER (the French Research Institute for Exploitation of the Sea) to operate and market the ARGOS system, CLS today provides satellite-based solutions to 5 sectors of activity, including environmental monitoring, maritime surveillance, energy & mining, sustainable fisheries and fleet management.
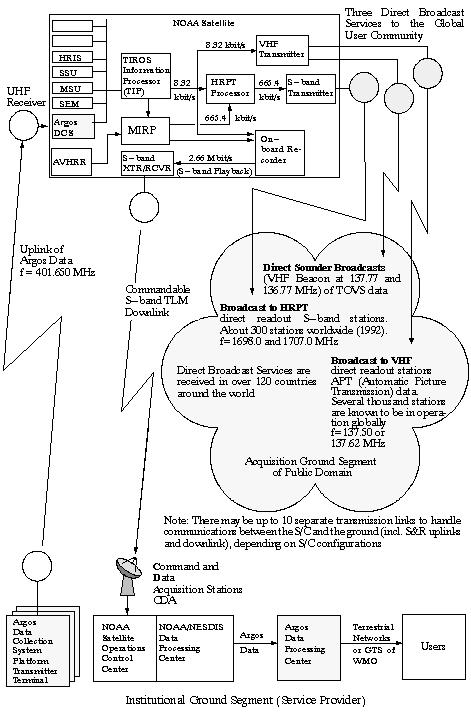
The Argos/DCS supports NOAA in its overall environmental mission objectives, collecting (ground and space) truthing data. The concept uses many ground segment platforms (fixed and moving), i.e. buoys, free-floating balloons, wildlife, and remote weather stations, and equips them with a PTT (Platform Transmitter Terminal) package. These PTTs collect and process relevant environmental data and transmit them to the NOAA-POES satellites. The on-board Argos DCS receives the incoming signal and measures both the frequency and relative time of occurrence of each transmission.
The S/C retransmits these data via the CDA (Command and Data Acquisition) stations (one at Wallops Island VA, the other at Fairbanks, AK; there is in addition a downlink station at Svalbard Norway), to a central NOAA processing facility in Suitland, Maryland, USA. The DCS information is decommutated and sent to the Argos processing centers in Toulouse France and Largo (Landover) Maryland USA, where it is processed, distributed to the user community, and stored on magnetic tape for archival purposes. 5) 6)
The processing and distribution service is provided commercially by CLS (Collecte Localisation Satellites - created in 1986), a CNES and IFREMER subsidiary in Toulouse, France, and by Service Argos Inc. of Largo, MD, USA (a CLS subsidiary). Service to the user community has been continuously provided since fall 1978.
The Argos system concept involves three interactive elements or subsystems:
1) PTTs (Platform Transmitter Terminals) of the various clients in the ground segment, equipped with sensors to measure environmental parameters. The PTTs are the Argos user platforms, fixed or mobile, deployed at sea, on land or in the air and transmitting independently.
2) The space segment DCS payload of the service provider. A desired complement of two operational NOAA spacecraft and two in backup in simultaneous orbit, with instrument packages that receive PTT messages on a random access basis, then separate, time-code, format and retransmit the data to ground stations,
3) The ground segment of the service provider. The ground stations and two Global Processing Centers (GPCs) in Toulouse, France and Landover, MD, USA, where data are retrieved, processed, and distributed to users. Each centre can take on the full operational workload if the other fails.
Flying the Argos DCS system aboard NOAA polar-orbiting satellites provides worldwide coverage. Additionally, incorporating the Argos instrument on a moving satellite allows for locating an in-situ platform using Doppler shift calculations. This positioning capability permits applications such as monitoring drifting ocean buoys and studying wildlife migration paths. Argos DCS can track platforms anywhere in the world, supplying positions to users around the globe. Platforms can be attached to practically any type of physical object, for example: an ocean buoy, a stream gauge, a bear, a bird, or a fishing vessel. Argos platforms are located by using the Doppler Effect, which gives an accuracy of up to 150 m. Doppler locations are good for compact, low-power transmitters and in difficult radio environments. The satellites receive the signals sent even in extreme conditions such as a platform transmitting from a dense rainforest or from transmitters on the polar ice caps.
1) Environmental monitoring
By combining the data acquired with their location, Argos enables scientists around the world to improve their understanding of animal behaviour, ocean information and forecasting.
- Wildlife monitoring
- Oceanography
- Climatology
2) Sustainable management of marine resources
The future of our fisheries depends to a large extent on our ability to preserve stocks effectively. Argos has been certified by most of the leading seaboard nations around the world and is already operating on thousands of vessels worldwide.
- Marine fisheries
3) Establishing, managing and monitoring marine protected areas
To preserve the rich resources of the marine world, governments are developing programs for Marine Protected Areas (MPAs).
The satellite location and data collection solutions developed with Argos system provide support to MPA managers.
They can be used to observe the behaviour of marine species thus aiding authorities to establish critical zones and periods for safeguarding biodiversity.
4) Tracking fishing boats, communicating and managing fisheries
To support the implementation of sustainable marine-resource management policies, CLS has developed the Vessel Monitoring System (VMS), a satellite-based system for monitoring and managing fisheries.
CLS provides an equipment package (transmitter + software) that meets the specific needs of the industrial and small-scale fishing sectors.
5) Combating illegal, undeclared, unregulated fishing (IUU)
The VMS (Vessel Monitoring System) identifies ships equipped with a satellite location transmitter. It improves real-time observation of ship positions and activities, boat by boat, fishery by fishery, in order to provide a better estimate of on-board stocks.
It also makes it possible to detect unregistered vessels in the zone.
6) Supporting the development of small-scale fishing
To meet the management and support needs of small-scale fishing boats, CLS provides a tracking system that identifies boats equipped with satellite location transmitters.
This system makes it possible to manage potential conflicts between industrial and small-scale fishing activities more effectively. It can also be used to assist operations in the event of problems arising.
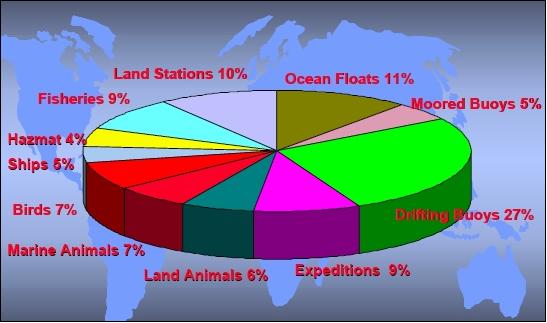
The majority of Argos DCS users are government/non-profit agencies and researchers. At the start of the 21st century, Argos DCS customers are engaged in over 1000 programs operating approximately 15,000 data collection platforms in 72 counties.
Argos Space Segment
Each Argos payload is equipped with a DCLS (Data Collection and Location System), also referred to simply as DCS, which receives all transmissions from the platforms in view during a pass. Functionally a DCLS is comprised of the following subsystems:
• Housekeeping equipment, power supply and DCLS command interface
• Receive assembly (receiver and search unit, both with full redundancy)
• Signal processing assembly (four identical Data Recovery Units (DRUs). All data are tape recorded on board the spacecraft.

Argos Ground Segment
A set of user platforms, fixed or mobile, deployed at sea, on land, or in the air. All platforms reporting to the Argos system must carry a certified PTT (Platform Transmitter Terminal) package for satellite uplink communication. Each PTT outputs a short message (of 0.36 to 0.92 seconds duration, or of 32 bits to 256 bits maximum length) modulating a carrier frequency. Message transmission intervals range from 90 - 300 s, depending on the application.
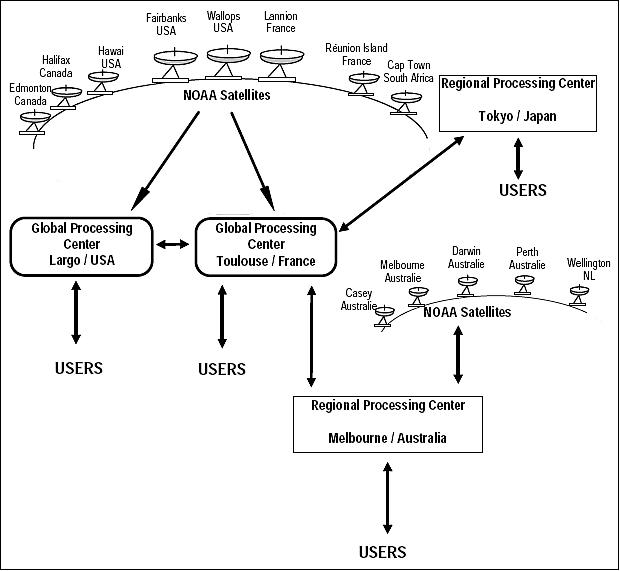
The ground segment of the service provider consists of two NOAA/NESDIS CDA (Command and Data Acquisition) stations, one at Wallops Island VA, the other at Fairbanks, AK. In addition there is a downlink station at CMS (Centre de Météorologie Spatiale) Lannion, France. All these stations also provide real-time data during the pass. Argos provides two GPCs (Global Processing Centers), one in Largo, MD, the other in Toulouse, France. Each GPC receives data from all platforms but processes only the data that belong to “its” users. Both centers will, however, immediately process all data in case of necessity, thereby ensuring full redundancy. 7)
As of 2002, the Argos ground segment provides five processing centers (the two global processing centers in Toulouse and Largo continue to process data sets from all receiving stations; the regional centers are: Melbourne, Tokyo, and Lima):
• Toulouse, France
• Largo, MD, USA
• Melbourne, Australia
• Tokyo, Japan
• Lima, Peru
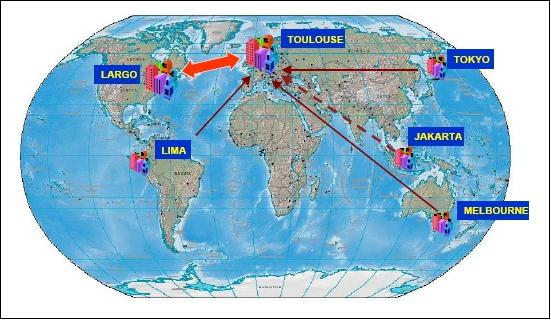
Figure 4: The Argos Processing Centers (image credit: Service Argos Inc.)
Communication Concept
Collection Uplink: Argos provides a total of four (eight in next series) parallel receiving channels for data collection, each at a rate of 400 bit/s. Each PTT in the ground segment transmits encoded messages at regular intervals (fixed platforms at 45 - 200 seconds, drifting or mobile platforms in the order of 90 - 150 seconds).
Note: the search unit is a spectrum analyzer that scans a 24 kHz band centered at 401.650 MHz. The next series of DCS will have 80 kHz of bandwidth (100 kHz allocated, two safeguard bands of 10 kHz at each end). Time tagging and frequency measurements are made by the DRUs and processed on the ground for location determination.
Uplink frequency (UHF band) | 401.65 MHz |
Message length | Up to 32 bytes |
Repetition period | 45 to 200 seconds |
Messages/pass: | Varies depending on latitude and type of service |
Transmission time: | 360 - 920 ms |
Duty cycle | Varies |
Power | Battery, solar, external |
Downlink: The data received by the Argos DCLS is multiplexed on-board by the TIP processor and transmitted to the ground via three paths:
• Real-time: the TIP output (8.32 kbit/s, see Figure 2) directly modulates a VHF beacon which transmits continuously.
• Real-time: the TIP output is multiplexed on-board the satellite with HRPT data and transmitted in S-band
• Delayed Transfer: the TIP output is also recorded by a tape recorder, and each time the satellite passes over one of the ground stations, the recorded data is dumped via S-band telemetry.
The Argos communication capability is limited to the function of data collection from the PTTs. The concept does not offer a remote configuration control capability of the data collection platforms in the ground segment.
Access Method
The on-board DCLS receiver picks up messages from the transmitting platforms in its area of visibility. The receiving system can discriminate between message arrival times and between frequency shift due to the Doppler effect. Up to four (eight in next series) messages may be processed simultaneously.
The Argos access scheme employs `pure (i.e. unslotted) ALOHA.' Messages from the PTTs are received on-board on a random access basis. The Argos Doppler system provides a position fix for drifter (or mobile) platforms. This setup requires between three and five successful transmissions, which must occur within one pass (footprint).
Within an average footprint of 10 minute duration, each platform in the ground segment usually has a number of attempts to make contact with the DCLS in the space segment.
• Fixed platforms: the number of transmission attempts of fixed platforms is three at a repetition rate of 200 seconds (average = 3).
• Drifting (mobile) platforms: the repetition rate is 90 - 150 seconds, hence the maximum number of transmission attempts possible within a footprint is 5 - 6 (average = 5). [About 80% of the possible position fixes are actually achieved by the system; 20% are rejected during ground processing for various reasons, mainly geometrical configuration: number of messages, pass duration, distance to the track, etc., according to CLS Argos].
The nature of random access very much degrades data collection performance by the space segment. The scheme of pure ALOHA permits under normalized offered channel traffic a maximum channel throughput rate of 18%. Any two signals overlapping in time and frequency may interfere, with the loss of both. The principal parameter that affects the performance of the Argos data relay system is “interference”: it occurs when the demand for service exceeds the system's capability. The result is loss of data from system `blockage'. The maximum number of platforms that a single Argos DCLS can actually service within a footprint is in the order of 650. In this number, there is a certain mix of fixed (collection service only) platforms and drifting (collection and location services) platforms, a further assumption is a certain message length.8) 9) 10)
The probability of good message reception is 67% with a traffic density of 2.6 Erlang, and 8.3 Erlang for the next improved DCLS series which is scheduled to be launched starting in 1998 with NOAA-K.
The total number of platforms registered as active in the Argos system globally is around 4000, out of which around 2300 are transmitting every day. The remaining platforms transmit once every two or three days, or less. This information was provided by CLS Argos (6/1993), the service provider of the system.
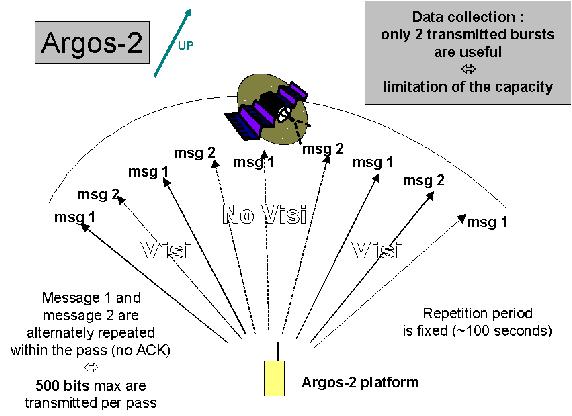
Argos-2 DCS, the Next Generation Instrument Package
Argos-2 represents an enhanced instrument package over the old Argos system - in response to user-identified priorities. The new performance spectrum includes: 11)
• Implementation of eight DRUs (Data Recovery Units) instead of four on the previous Argos generation. Hence, the Argos-2 generation spacecraft are able to process eight messages simultaneously.
• The uplink bandwidth was increased from 24 to 80 kHz. This permitted a better distribution of PTT transmitter frequencies and a better discrimination of signal reception at the spacecraft. Hence, for a given platform population more messages can be received intact. The increased onboard capacity - wider receiver bandwidth, and more flexible management of transmitter repetition periods - offers more PPT sensor data transmissions.
• Argos-2 offers greater sensitivity to low-power signals (receiver with sensitivity of -131 dB). The impacts of the higher sensitivity (from -128 to -131 dB) are broad in scope in that the general population of Argos transmitters will require less power.
• So-called PMTs (Platform Messaging Transceivers) are being introduced by the ground segment platforms (PTTs) able to receive and interpret messages sent by the satellite. The new service spectrum permits for example to calibrate platform sensors and to manage duty cycle by switching terminals on and off when needed. The first NOAA satellite with the Argos-2 system package implemented was NOAA-15 (launch May 13, 1998) with Argos-2 system improvements continued on NOAA-16 (launch Sept. 21, 2000), NOAA-17 (launch June 24, 2002) and NOAA-18 (launch May 20, 2005).
Note: Initially it was planned to provide an enhanced service of a two-way messaging capability for Argos-2. However, this was only accomplished for Argos-Next.
The first Argos-Next (improved Argos-2) implementation has been flown on ADEOS-II (JAXA) with a launch Dec. 4, 2002; Argos-Next service provision tests started on Jan. 29, 2003.
Note: end of ADEOS-II mission Oct. 25, 2003, due to spacecraft power failure).
ADEOS-II was the first satellite that carried an Argos two-way instrument package (Argos-Next) allowing users to send messages to their platforms equipped with an Argos receiver on the PTT, called PMT (Platform Messaging Transceiver), via a specific Argos downlink. Argos-Next also supports secure message transmissions. 12) The Argos-Next implementation on ADEOS-II involved also a corresponding ground segment in Japan and integration into the existing CNES/CLS/NOAA Argos network.
This New Ground Segment Provides
• Reception of data from ADEOS-II, extraction of Argos-Next data and transmission of these data to the CLS processing center in Tokyo, Japan (under JAXA responsibility)
• .Processing and distribution of Argos-2 (and Argos-Next) data and exchange of collected data with the processing center in Toulouse, France (under CNES and CLS responsibility).
Background: As early as December 1993, NASDA (Japan) and CNES (France) agreed to fly an enhanced Argos instrument on Japan's ADEOS-II environmental monitoring satellite. Through this agreement, CNES would be able to conduct in-flight validation of Argos enhancements under development and bring NASDA on board as a third partner in what had previously been a bilateral program managed jointly with NOAA (USA).
Argos-3 instrument package with two-way capability onboard: The Argos-3 instrument package is also referred to as A-DCS (Advanced Data Collection System) as well as ADCS.
The main objectives of the Argos-3, or mission are recalled hereunder: 13)
• To insure the continuity of the system with the current Platforms named PTT-A2
• To improve the performance of the Argos system in terms of waiting time and overall data collection capability. The bandwidth of the Argos-3 receiver is now 110 kHz (24 kHz for Argos-1 and 80 kHz for Argos-2)
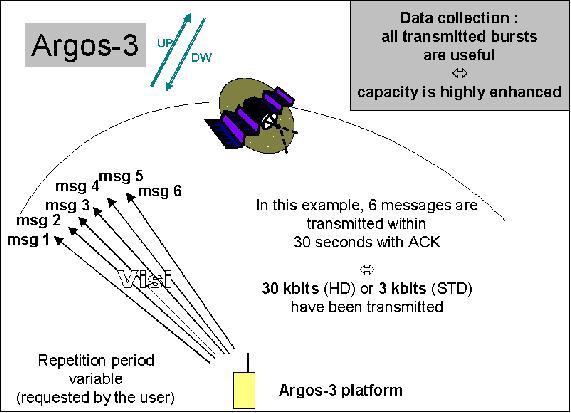
• To provide users with the downlink message function, validated by the Argos-Next instrument installed on JAXA's ADEOS-II (now out of service), namely a space-to-earth link dedicated to the transmission of messages to the Argos Platforms fitted with appropriate receivers.
This downlink will allow:
- To acknowledge their uplink messages and then to increase the capacity of the system
- To transmit broadcasting messages as time or orbit ephemeris in order to activate the platforms emitters only when a satellite is above
- To modulate the length of the messages or the repetition period of the messages according to the user needs.
• To improve the performance of the Argos system in terms of overall data collection capability, through the introduction of a new kind of Platforms: the high data-rate transmitters named PTT-HD or PMT-HD (Platform Messaging Transceivers-High Data rate). Those Platforms are not designed to be autonomously located by Doppler technique. However they may be located using an integral navigation receiver.
• To provide a better sensitivity thanks to a new kind of Argos-3 Platforms, called the new generation Platforms PTT-A3, PTT-ZE, PMT-A3. Those Platforms have the capability of a very low-power consumption.
• To upgrade the data management system for the function ”User Messages to Platforms” under the responsibility of the Downlink Messages Management Center (DMMC) located in Toulouse.
The Argos-3 system design proposes three types of terminals to cover more applications. These terminals use different modulation waveforms: BPSK (Bi-Phase Shift Keying), QPSK (Quadra-Phase Shift Keying) and GMSK (Gaussian Minimum Shift Keying), channel coding, data volumes and bit rates with a good stability oscillator for the Doppler location. 14) 15) 16) The major improvement of the new system is that it will now be able to send orders to its terminals whereas before they were only capable of receiving data (up to Argos-2 inclusive). There are some 10,000 Argos terminals throughout the world that send back data daily on the state of the oceans (currents, salinity, etc.), the habits and movement of some 3,000 animals, whether they be in the sea, on land, or in the air, as well as the localization and position of adventurers and navigators.
Current Argos-2 buoys are sending data back continuously, even if no satellite is close enough to detect it, which uses up the buoys energy supply. With the new system, it will be possible to send messages to tell terminals to emit their data which will thus prolong their lifespan. The current terminals also send their data several times to assure that it is received; but the new system will be able to send messages letting the terminal know that the data has been collected. As a result, the terminals will not need to repeat themselves; hence, they will conserve their batteries. Engineers have also greatly enhanced the channels used for sending and receiving Argos-3 data; they now have broadband capabilities (4.8 kbit/s), which is ten times the amount of data transmission capability as was possible in the previous Argos generation.
| Parameter | Argos-1 | Argos-2 | Argos-Next | Argos-3 |
| Center frequency | 401.650 MHz (UHF) | |||
| Frequency bandwidth | 24 kHz | 80 kHz | 80 kHz | 110 kHz |
| Uplink data rate | 400 bit/s | 400 bit/s | 400 bit/s | 400 bit/s (low) 4.8 kbit/s (high) |
| Downlink | No | No | Yes | Yes |
| DRU (Data Recovery Unit) | 4 | 8 | 8 | 9 low data rate + 3 high data rate |
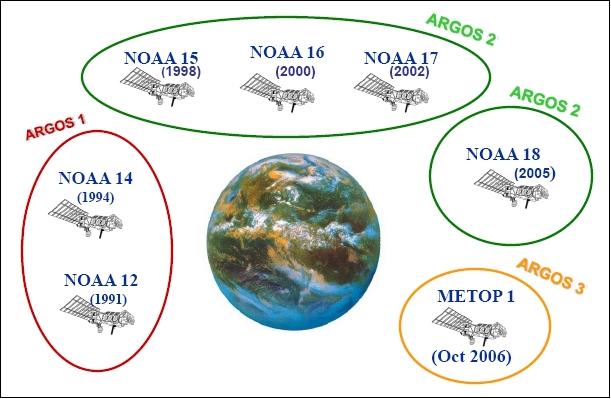
| Satellites equipped with Argos | TIROS-N (Oct. 13, 1978) to NOAA-14 (Dec. 39, 1994) | NOAA-15 (K) NOAA-16 (L) NOAA-17 (M) NOAA-18 (N) | ADEOS-II (Dec. 4, 2002) Ops until Oct. 25, 2003 when a power failure occurred MetOp-A (Oct. 19, 2006) | NOAA-19 SARAL (ISRO) JPSS |
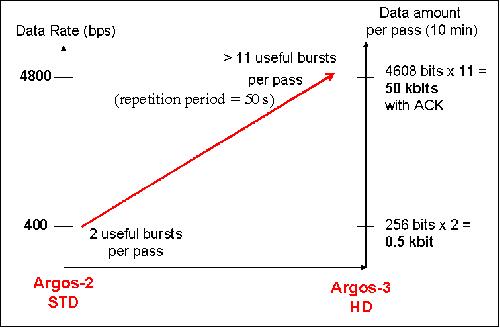
| Data transmitted per satellite pass | 500 bit | 500 bit | 500 bit | up to 30 kbit |
Table 2: Main characteristics of the various Argos DCS generation implementations 17) 18)
Actual and Projected Launch Dates of Spacecraft with Argos Instruments
Spacecraft Orbit Launch or projected launch
NOAA-15 (K prior to launch) AM orbit (7:30) May 13, 1998
NOAA-16 (L prior to launch) PM orbit Sept. 21, 2000
NOAA-17 (M prior to launch) AM orbit (10:00 change!!) June 24, 2002 with Titan-2 vehicle ADEOS-II JAXA) AM 10:30 Dec. 4, 2002 ( mission end on Oct. 25, 2003)
NOAA-18 (N prior to launch) PM orbit May 20, 2005 with Delta-2 vehicle MetOp-A AM orbit Oct. 19, 2006 with Soyuz vehicle NOAA-19 (N' prior to launch) PM orbit Feb. 6, 2009 with Delta-2 vehicle
SARAL (Satellite with ARgos and ALtiKa) of ISRO LTAN at 6 hours 2011 with a PSLV launcher MetOp-B AM orbit 2012 with Soyuz vehicle MetOp-C AM orbit 2014 with Soyuz vehicle JPSS (Joint Polar Satellite System) PM orbit 2016
• The MetOp-A spacecraft of EUMETSAT (launch Oct. 19, 2006) carries the first Argos-3 instrument demonstrator package (also referred to as A-DCS (Advanced Data Collection System), equipped with a downlink capability of 400 bit/s (low) and the 4.8 kbit/s high data rate channel.
Argos-3 Uplink
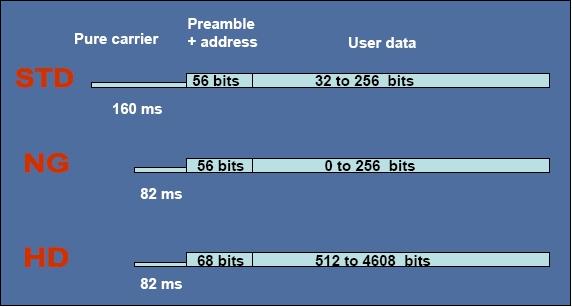
• Uplink: support of 3 types of platforms @ 401 MHz - Standard: 400 bit/s, basic Argos Service; STD (Standard Service): Argos-1, 2, and 3; Bi-phase-L, no coding - High sensitivity: 400 bit/s, very low power; NG (High Sensitivity Service): additional 5 dB margin; Mix-QPSK, convolutional coding 7, 1/2 - High data rate (HD): 4.8 kbit/s, 5 W; HD: up to 50 kbit per pass; GMSK, convolutional coding 7, 3/4
• Improvement of system sensitivity for STD beacons (probability of correct processing > 99%) - Argos 1: C/N0 (Carrier-to-Noise) ratio=43 dB Hz - Argos 2: C/N0=40 dB Hz - Argos 3 : C/N0=37 dB Hz (-134 dBm at instrument input)
• Improvement of system sensibility with new types of beacons (probability of correct processing > 99%) - NG: C/N0=34 dB Hz (-137 dBm) - HD: C/N0=48 dB Hz (-123 dBm) Argos-3 downlink: transmits messages @ 466 MHz of variable length (~ 200 bit max) to the platforms fitted with appropriate receivers
• Beacon equipped with a receiver = PMT (466 MHz, 400 bit/s, half or full duplex)
• Main functionalities:
- Acknowledgement of uplink messages [from a designated PMT (Platform Messaging Transceiver)]
- Sending of PMT instructions (all kinds of information sent by the user to his PMT)
- Transmission of satellite ephemeris
- Time broadcasting
Argos-3 Onboard Instrumentation
The Argos-3 project began in 1997. Delivered in 2002, the instrument received new versions of the management and processing software in 2004 and was tested extensively, at satellite level by Astrium, and in conjunction with the operational ground segment by EUMETSAT. All integration activities and associated tests with the Argos-3 instrument are managed by the CNES Argos team. 20)
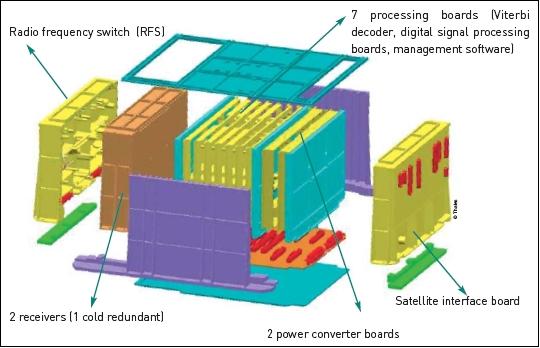
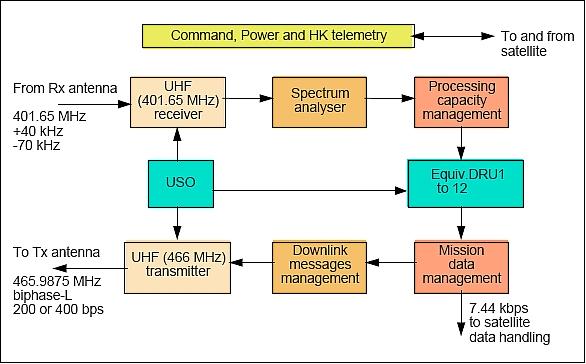
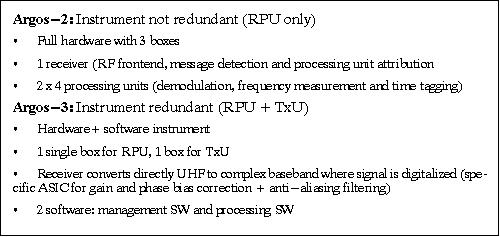
Components of the Argos-3 Onboard Instruments
• The RPU (Receiver Processor Unit) providing the following functions - Processing of the received uplink signals - Downlink management - Interfaces with the receiver, the TxU and the satellite
• The TxU (Transmitter Unit) sending the emissions (messages) to the PTTs in the ground segment
• The harness for the RPU to TxU connection The RPU (16 kg, 36 W) and TxU (8kg, 26 W) boxes have a cold internal redundancy that can be activated by TC level. In the same way, the USO (Ultra Stable Oscillator) has a cold redundancy. RPU (Receiver Processor Unit). The RPU onboard a spacecraft processes received uplink signals @ 401.6 MHz, measures the incoming frequency, time-tags the message, creates and buffers mission telemetry, manages the downlink and acts as interface between the receiver, the TxU (Transmitter Unit) and the satellite. Featuring fully digital processing, the RPU stores messages and either relays them in real-time to the nearest regional antenna - or in deferred time to a global center (maintained by NOAA, Eumetsat). A backup RPU is included as part of the device. The RPU has dimensions of 195 mm x 280 mm x 365 mm.

The TxU sends signals to platforms in the ground segment equipped with transceivers (PMTs) @ 466 MHz, including error-free message acknowledgement signals. The downlink allows users to send defined PMT instructions (TxU can selectively address one or more PMTs) and system operators to send global messages/commands such as satellite ephemeris or broadcasting time. Downlink software was specially designed for Argos-3. A backup TxU is included. The TxU has dimensions of 100 mm x 280 mm x 310 mm. The RPU and TxU instruments are being manufactured at Thales Alenia Space.
International Cooperation
Plans are to embark also an Argos-3 instrument on an ISRO (Indian Space Research Organization) platform in the near future. As a result, the Argos system is an operational system exploited by a number of international programs. It is the main transmission channel and processing chain for data gathered by the following major international ocean observation programs:
• DBCP (Data Buoy Cooperation Panel), a network of drifters and moored buoys • SOOP (Ship of Opportunity Program), XBT (Expendable Bathythermograph) lines
• Argo profiling float project. In the future, Argos will be an important part of GEOSS (Global Earth Observation System of Systems) - an international initiative approved by over 60 governments and the European Commission (EC) and designed to improve our understanding of the Earth system.
PMT (Platform Messaging Transceiver) - Argos-3 user platforms Argos-3 and all future two-way communication satellite instruments are completely compatible with existing transmitters. However, to benefit from the downlink and high data rate uplink unique to Argos-3, user platforms in the ground segment must be equipped with a new generation of Argos-3 compatible terminals called Platform Messaging Transceiver (PMT). The innovative and new PMT is capable of sending and receiving messages to/from satellite, as well as processing commands. Users equipped with a PMT and subscribed to the downlink service will fully benefit from the new communication capabilities made possible with Argos-3. The first PMT prototypes were developed for the ADEOS-II spacecraft of JAXA (launch Dec. 4, 2002). Since then, smaller prototypes have been developed, capable of transmitting larger volumes of data. Furthermore, PMTs are able to receive and process system information and remote commands from users. First generation PMTs were available in 2007, a few months after the launch of MetOp-A (launch Oct. 19, 2006, commissioned on May 21, 2007). The first interactive session on May 10, 2007 between METOP-A and PMT worked perfectly well. PMTs communicate intelligently with the Argos-3 payload.
• Once the PMT receives acknowledgement that a message has been received error-free, it stops sending this message.
• When the PMT receives a user command, it sends acknowledgement to the satellite, then processes the command.
• When the PMT receives system information, it calculates the orbit of the different satellites, thus sending messages efficiently and intelligently, only when a satellite is in sight.
• etc.
Argos for Next Generations
For nearly 40 years, the international space agencies that manage the Argos system have been committed to technological advancements for the Argos system. Capitalising on this long experience in state-of-the-art, innovative instrumentation, the French Space Agency, CNES, has invested in a new generation of Argos payloads, called Argos-4, that began flying on the satellites of its international partners in 2022.
The increased bandwidth of Argos-4 technology as well as the operational downlink will make it possible to send ever more data even more efficiently, improving performance for existing applications as well as opening the door for a host of new ones.
In parallel, CLS, with the support of the CNES, is working to develop a completely new generation of dedicated satellites, using nanosat technology. This constellation of 25 nanosatellites, called Kinéis, is planned to be operational in 2023.
Kinéis aims to become a major player in New Space and allow, by 2030, several million objects to be connected wherever they are on the surface of the globe. Professionals and the general public will have access to a global satellite location and connectivity service, which is very easy to use and very affordable.
https://youtu.be/sP3oQxuz_gQ
Figure 21: How Argos works? Argos is a pioneer satellite-based system which has been operating since 1978. The Argos system collects data from Platform Terminal Transmitters, PTTs, and distributes sensor and location data to the final users. Argos helps the scientific community to better monitor and understand our environment, but also enables industry to comply with environmental protection regulations implemented by various governments (video credit: Argos)
Timeline :
- CNES launched the Argos ANGELS (Argos NEO Generic Economic Light Satellites) project, the first Argos-4 payload onboard a nanosatellite (12U CubeSat) on 18 December 2019.
- New generation of satellite instrument Argos-4 was launched on November 26, 2022 by ISRO onboard OceanSat-3.
- Kinéis, a subsidiary of CLS will launch new connectivity based on 25 nanosatellites in 2023.
- EUMETSAT (European Agency for Meteorological Satellites) is committed to launching Argos payloads onboard European satellites until 2036.
Developments & Events of Argos-4
• October 7, 2022: Under a joint agreement between NOAA and CNES, Argos-4 (a 12U CubeSat) was launched as a hosted payload aboard the General Atomics (GA-EMS) GAzelle satellite, nicknamed by Rocket Lab “It Argos Up From Here”, on October 7, 2022, at 17:09 UTC on a Rocket Lab Electron vehicle from Māhia Peninsula, New Zealand. 4) 5)
- Orbit: Sun-synchronous orbit, altitude of 850 km, inclination of 98º.
November 26, 2022: Argos-4, the next advancement in the Argos DCS, has been launched by ISRO onboard OceanSat-3.
September 21, 2022: We are just a few weeks away from the planned launches of two Argos-4 payloads, an advanced satellite instrument that will track the movement of wildlife, as well as critical environmental data around the world.
July 27, 2022: General Atomics Electromagnetic Systems (GA-EMS) has successfully completed environmental testing of the company’s satellite platform and has integrated the Argos-4 hosted payload in preparation for a fall 2022 launch. 7)
January 2020: ANGELS (Argos Neo on a Generic Economical and Light Satellite), the first Argos-4 new generation 12U CubeSat, developed by CNES, HEMERIA and Thales Alenia Space, was launched as a secondary payload on 18 December 2019 by Arianespace from Kourou. This marked the beginning of the metamorphosis of the Argos system. 8)
References
1) “Argos - Worldwide tracking and environmental monitoring by satellite,” URL: http://www.argos-system.org/
2) D. Meldrum, D. Mercer , O. Peppe, “Developments in Satellite Communication Systems, Update Oct. 2001,” URL: http://noaasis.noaa.gov/ARGOS/pdfiles/telecom-review-dec-2001.pdf
3) “Electronic Code of Federal Regulations (e-CFR),” May 2007, URL: http://ecfr.gpoaccess.gov/...
4) B. Woodward, “The Argos Data Collection and Location System,” 2004 Satellite Direct Readout Conference, Dec. 6-10, 2004, Miami, FLA, USA, URL: https://web.archive.org/web/20170507083837/http://directreadout.noaa.gov/miami04/docs/tues/Bill_Woodward.pdf
5) http://noaasis.noaa.gov/ARGOS/
6) “Guide to Data Collection and Location Services using Service Argos,”, DBCP (Data Buoy Cooperation Panel) Technical Document No. 3, Intergovernmental Oceanographic Commission (of UNESCO), World Meteorological Organization, 1995, URL: http://ioc-unesco.org/components/com_oe/oe.php?task=download&id=10332&version=1.0&lang=1&format=1
7) Philippe Schwab, Claude. Gal, “Argos DCS Ground Segment,” 5th International Symposium on Space Mission Operation and Ground Data Systems (SpaceOps 98), June 1-5, 1998, Tokyo, Japan, URL: http://track.sfo.jaxa.jp/spaceops98/paper98/track2/2c003.pdf
8) Note: the figure of 650 serviceable platforms in a footprint was provided by `CLS Argos' of Toulouse
9) “A Definition Study of an Advanced Data Collection and Location System (ADCLS),” prepared for GSFC by ECOSYSTEMS International Inc., January 1986
10) Christian Ortega, Bill Woodward, “Argos Downlink,” DBCP Technical Workshop, Angra dos Brazil, Oct. 20, 2003, URL: ftp://ftp.wmo.int/Documents/PublicWeb/amp/mmop/documents/dbcp/Dbcp24-Angra-2003/Documents/2_Sesssion_II/2_2_Ortega_Woodward.ppt
11) http://noaasis.noaa.gov/NOAASIS/ml/satservices.html
12) “Argos Joint Tariff Agreement, Twenty-third Meeting,” Final Report, Angra dos Reis, Brazil, 27-29 October 2003, URL: [web source no longer available]
13) “The Argos-3 (or A-DCS) instruments,” 39 th Argos Operations Committee meeting, Prepared by CNES, June 7th, 2005, URL: http://noaasis.noaa.gov/ARGOS/conf05/E2_Argos3_instrument.pdf
14) E. Bouisson, J.-F. Dutrey, P. Guillemot, J. Delporte, “Post-Processing Solutions to Characterize Data Collection and Location Terminals for the Argos-3 System,” PSIP'2003 - 3rd International Symposium on Physics in Signal and Image Processing., Jan. 29-31, 2003, Grenoble, France
15) Argos-3 - The New Generation, URL: https://web.archive.org/web/20110814035457/http://www.argos-system.org/html/system/enhancements_en.html
16) “Advanced Data Collection System Instrument Control Document, (A-DCS ICD)” EADS Astrium and MetOp Team, April 2005, URL: http://www.eumetsat.int/idcplg?IdcService=GET_FILE&dDocName=PDF_TEN_EPS-ADCS-ICD&RevisionSelectionMethod=LatestReleased
17) “The Argos-3 (or A-DCS) instruments,” 40th Argos Operations Committee meeting, CNES, May 24, 2005, URL: http://noaasis.noaa.gov/ARGOS/conf06/E-2_Argos3_Instrument_40.pdf
18) Information provided by Christopher O'Connors, NOAA, Suitland, MD, USA
19) “A-DCS Advanced Data Collection System,” ESA, June 26, 2006, URL: http://www.esa.int/esaLP/SEM3JGG23IE_LPmetop_0.html 20) “Argos-3: The New Generation,” CLS (Collecte Localisation Satellites), URL: https://web.archive.org/web/20091222051522/http://www.argos-system.org:80/documents/publications/brochures/argos3_metop_en.pdf