ARGOS (Advanced Research and Global Observation Satellite)
EO
Atmosphere
Ocean
Atmospheric Temperature Fields
Quick facts
Overview
| Mission type | EO |
| Agency | DoD (USA) |
| Mission status | Mission complete |
| Launch date | 23 Feb 1999 |
| End of life date | 31 Jul 2003 |
| Measurement domain | Atmosphere, Ocean, Land |
| Measurement category | Atmospheric Temperature Fields, Radiation budget, Atmospheric Humidity Fields, Ozone, Atmospheric Winds |
| Instruments | GPS receiver |
| Instrument type | Other, Atmospheric chemistry, Precision orbit, Data collection, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See ARGOS (Advanced Research and Global Observation Satellite) summary |
ARGOS (Advanced Research and Global Observation Satellite)
ARGOS (also referred to as STP mission P91-1) is a large DoD research and development satellite mission, managed by the Tri-Service Space Division at Kirtland AFB (SMC/TE), Albuquerque, NM. It is part of the USAF Space Test Program (STP) with the objective to demonstrate several new space technologies and to fly payloads for global Earth sensing and celestial observations. 1)
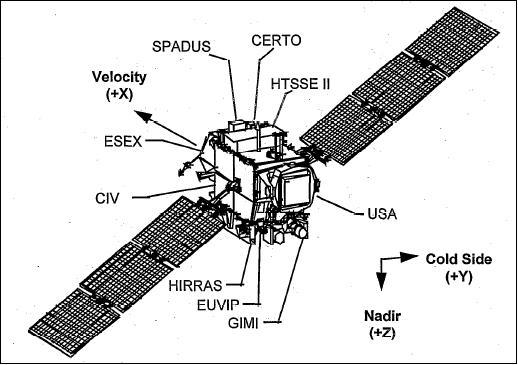
Spacecraft
The S/C was designed/built at Boeing North American, Anaheim and Seal Beach, CA. The ARGOS structure of modular panel design, it is three-axis stabilized. Navigation and attitude determination are supported by horizon sensors (to calibrate gyro drifts), three-axis gyros (ring laser gyro package), and an embedded GPS receiver. The attitude pointing accuracy requirement for the S/C is 0.05º (1 sigma). At the core of space vehicle flight computer processing is the IEU (Integrated Electronics Unit), which acts as the “brains” for space vehicle operations.
An on-board automated mission planning system, developed by the University of Colorado, is used to optimize on-board data handling and power. The on-board solid-state recorder provides 2.6 Gbit of data storage. S/C launch mass = 2718 kg, power = 2.2 kW (average = 1 kW), design life of 1 year with a goal of 3 years. 2)
Launch
ARGOS was launched on a Delta-II vehicle from VAFB, CA on Feb. 23, 1999. Secondary payloads on this flight were two microsatellites sponsored by NASA: SUNSAT of the University of Stellenbosch, South Africa, and Ørsted of Denmark.
RF communications: Data transmissions in S-band, VHF and UHF. The downlink data rate is 4 kbit/s or 128 kbit/s on carrier I, and 1, 4 or 5 Mbit/s on carrier II. The uplink data rate is 2 kbit/s.
Orbit: Sun-synchronous circular orbit, altitude = 846 km, inclination = 98.7º, equatorial crossings at 14:00 (daytime orbit) and at 2:00 hours (night side orbit).
Mission Status
• On July 31, 2003, support of all ARGOS operations was terminated (providing 4 1/2 years of operations). 3)
• The X-ray detectors of the USA (Unconventional Stellar Aspect) experiment were activated 29 April 1999 and operated until November 16, 2000, at which time both detectors had lost all their P-10 gas (an argon/methane mixture) and could no longer function. The computing testbed continued to operate through August 2001. Nearly 10 megaseconds of data were gathered with the X-ray detectors pointed at various celestial targets. About 60 targets were observed overall but a number of these were only surveyed briefly so that much of the time was concentrated on a smaller list. The great majority of the observations made with USA had either neutron star or black hole sources as targets. USA consisted effectively of four experiments, in astronomy, navigation, space-based computing, and aeronomy. All four aspects were successful. 4)
With regard to applications, USA was successfully used for experiments in autonomous attitude determination, position determination, and time-keeping using X-ray sources, all of which fulfilled their navigational objective. It was also used to study the density of the atmosphere at altitudes of roughly 70-150 km using a technique similar to X-ray tomography. The central aim of the navigational part of the program was to explore how well observations of X-ray sources can be used to determine the attitude, position and local time for a satellite in orbit.
• The attitude experiments were an unplanned accomplishment. As it happened, USA had to be used to diagnose and correct unexpected errors in the performance of the spacecraft attitude control system that initially caused it to miss targets. This was the first use of an X-ray sensor to provide diagnostic attitude information for the control of a satellite in orbit. Since USA was not an imaging system, attitude determination was done using transits of sources through the response of the collimator. When an X-ray source drifts slowly through the field of view it traces out the angular response function which is roughly triangular.
• ESEX (Electric Propulsion Space Experiment) was operated in early 1999 to demonstrate the compatibility and readiness of a 30 kW class ammonia arcjet subsystem for satellite applications. Two flight anomalies occurred in the early demonstration phase: 1) liquid ingestion was observed in the PFS (Propellant Feed System); and 2) the battery anomaly which ultimately led to the conclusion of the ESEX mission (Ref. 20).
The ESEX flight demonstrated high power electric propulsion is compatible with nominal satellite operations. Although further analyses are in-work, all of the data analyzed to date indicate the thruster and the high power components have no significant, deleterious effect on any satellite activities (Ref. 20).
Failure report of ESEX: The planned ESEX mission profile consisted of 10-15 firings of varying length, from 5-15 minutes. In order to accomplish the 30 kW firings (since no current spaceborne platform can generate a steady-state power level of that magnitude), rechargeable silver-zinc (Ag-Zn) batteries were used. These 80 Ahr batteries were charged from an on-board charging circuit that was designed to supply 0.67 A of charging current to the battery. For a typical operational cycle, the charging circuit would have been turned on approximately 24 hours after an arcjet firing, and allowed to shut off autonomously prior to initiating the next firing via a software-controlled battery voltage trip point. This planned operational flow was not attained as a result of the anomalous battery behavior. 5)
In the failure review, two primary issues were identified as the ultimate source of the battery failure. The first was a lack of an adequate review of the battery design, and the second was an inadequate execution of the flight qualification testing. - Ultimately, this anomaly occurred because of a programmatic philosophy to minimize cost.
Sensor Complement
HTSSE-II (High Temperature Superconducting Space Experiment II)
HTSSE-II was sponsored by NRO (National Reconnaissance Office), Navy, DARPA, BMDO, NASA, Canadian Government, and German Government. HTSSE-II is an NRL instrument with the objective to demonstrate and validate the performance of eight HTS (High Temperature Superconductor) materials/components in a microwave system setting (semiconductors and RF devices) with an accuracy sufficient to detect long-term changes. Measurement of power consumption, speed, space radiation effects, etc. at temperatures of 77 K (Note: HTS is an important emerging technology for the 21st century with the potential of major breakthroughs in commercial and military applications). Power reduction factors of two to three orders of magnitude are expected. The HTSSE-II instrument was designed and built in a partnership program between NRL industry (Northrop Grumman) and academia. The goal is the demonstration of an advanced mechanical cryocooler that may be used for focal plane arrays and cooled semiconductors as well as for HTS devices. 6) 7) 8) 9) 10)
The BAe (British Aerospace - now part of Astrium Ltd.) Stirling-cycle cryocooler (Oxford design with demonstrated reliability; nominal cooling capacity of 780 mW at 75 K) was selected for the HTSSE-II cryogenic bus cooling source. The HTSSE-II payload is divided into five temperature-controlled zones: 1) the electronics deck, 2) the BAe cryocooler, 3) the cryogenic cold bus, 4) CBSS (Cold Bus Support Structure), and 5) the TRW experiment package. Operating temperatures for the electronic deck and the BAe and TRW cryocoolers are separately controlled. The HTSSE-II cryogenic subsystem design is unique to space-deployable cryogenically cooled electronics in general, and microwave applications in particular. The central cold bus is the heart of the cryogenic subsystem where seven of the eight HTS experiments are mounted and cooled by the BAe cryocooler. The 8th device is a stand-alone subsystem where the HTS device is integrated with its own cryogenic refrigerator.
Device category | Major design features | Supplier |
Channelizers/filters | 4 channel input multiplexer @ 4 GHz | ComDev |
Receivers | 60 GHz communication receiver | TRW |
A/D converter | Digital logic using Josephson junctions | Conductus |
Digital IFM | 5 bit, 16 MHz resolution, fc=4GHz, bandwidth of 500 MHz | Conductus |
Digital multiplexer | Logic using HTS SQUID | TRW |
Delay line | 40 ns delay line | Westinghouse |
Antenna array | Adaptive nulling design, 4 elements, fc=5 GHz | Univ. of Wuppertal |
HTS Material Environment Effects Monitor | Measure of space radiation effects on Tc, Jc, Rs and λ | NRL |
Device or component | Major design features | Supplier |
RF input/output cables | Low thermal loss stainless steel, coaxial cables of 0.53 mm diameter | Gore |
MLI (Multi-Layer Insulation blanket for cryogenic cold bus | Aluminized mylar layers separated by silk net | Lockheed |
Mechanical cryocooler using Stirling cycle | Maintain cryogenic cold bus at 77 K with 500 mW load | BAe |
Digital instrumentation | Digitization of data from from RF processing system | Aeronics |
RF and video instrumentation | Detection/processing of RF test signals | ITT Government Systems |
HRT (HTSSE Remote Terminal) | Satisfy all command and data telemetry needs | Gulton |
Receive antenna | Receive C- and X-band signals transmitted from ground | ACA (Antenna Corp. of America) |
HTSSE-II is instrumented to monitor and diagnose the in-flight cryocooler and cryogenic payload status. On-orbit measurements are performed in combination with a ground-based, calibrated signal source. This is referred to as “bent-pipe” mode of operation. In this approach, test signals are transmitted from an NRL ground facility; they are received by the payload, passed through the device under test, detected, digitized, and stored for a later downlink to the receiving site. Experiments are characterized using on-board parameter measurement equipment. In characterizing an experiment (e.g., multiplexer, channelizer, etc.) a received pulse-modulated signal is amplified, filtered and applied to the HTS experiment. Simultaneously, the same signal is applied to the reference channel (C-band or X-band). Both the experiment output and the reference signal are detected and digitized providing comparative amplitude outputs. Since the two signals are from the same antenna and RF front-end hardware, the pulse amplitude difference in the two paths is a measure of the response of the experiment.
The HTSSE-II RF payload consists of a dual-band antenna, associated payload receiver modules, a VPM (Video Processor Module), and IFMM (Instantaneous Frequency Measurement Module). The receiver module and the VPM have RF and video interfaces with the cold bus containing the HTSSE-II experiments. The VPM performs parameter measurements on the detected RF signals from the receiver. Additional interfaces are VPM to digitizer and to the HRT (HTSSE Remote Terminal). All receiver control functions, such as redundancy switching, attenuator controls, and channel selection, are received through the VPM from the HRT. The HRT receives this information from the ARGOS S/C command and control and data bus, which uses MIL-STD-1553 bus architecture.
The receiver consists of a superconducting X-band four-channel demultiplexer with 100 MHz-wide channels, four commercial monolithically integrated GaAs mixers, and four custom-designed hybrid-circuit detectors containing heterostructure ramp diodes. The superconducting frequency demultiplexer is fabricated from thin films of YBCO (Yttrium-Barium-Copper-Oxide) which were pulse laser deposited onto an MgO substrate. The composite receiver unit has been integrated into the payload of HTSSE-II. - The HTSSE-II instrument has a mass of 132 kg, the power is 98 W.
EUVIP (Extreme Ultraviolet Imaging Photometer)
EUVIP was sponsored by the US Army and built by UCB (University of California, Berkeley). The objective is to investigate the upper atmosphere and plasmasphere for safe military communication system's design, prediction of magnetic storms, and characterization of the aurora. EUVIP also observes the Earth's horizon and stellar environment by measuring background radiation for future sensor design. The EUVIP experiment is mounted to the S/C body and oriented to view tangent altitudes from 200 to 550 km. EUVIP is also oriented to view the much of the same region of the sky measured by the HIRAAS limb scan.
The EUVIP experiment is essentially a telescope with a digital focal plane. The telescope design is based on a grazing incidence Wolter-Schwarschild Type I optics. The entrance aperture is a concentric ring with 40.3 cm outer diameter and 37.5 cm inner diameter, and 156 cm2 geometric area and 80 cm2 effective area in the EUV. The experiment detector uses a stack of microchannel plates and a wedge-and-strip anode for two dimensional imaging with 256 x 256 pixels. The overall instrument FOV is roughly 5¼ in diameter and aligned with the optical axis of the telescope. The instrument resolution is about 1.5 arcmin corresponding to 0.2 mm resolution at the detector focal plane. EUVIP dimensions are 89 cm x 58 cm x 53 cm, the instrument mass is 70.5 kg.
The detector is covered with three filters to isolate separate spectral regions. The three filter passbands measure the following constituents: 1) Lexan/B (7 - 20 nm); 2) Al/C (16-30 nm) and 3) Al/Sn (80 - 90 nm). The first and second filters measure astronomical sources and the Earth's magnetospheric emission from the He+ line at 30.4 nm. The third filter passband contains the dayside ionospheric emission from O+ at 83.4 nm, also measured by the HIRAAS and GIMI experiments.
USA (Unconventional Stellar Aspect)
USA is also referred to as the NRL-801 experiment. USA is an NRL collaborative payload (226 kg) with SLAC (Stanford Linear Accelerator Center). The objective to provide a research platform (testbed) for X-ray timing, time-resolved spectroscopy, and also to explore applications of X-ray sensor technology. A further objective of USA is to use X-ray detectors to provide autonomous timekeeping and navigation capabilities (use of X-ray binaries and pulsars as clocks and observing horizon crossings of bright X-ray sources). Observations of atmospheric occultations of X-ray sources, as in GIMI (Global Imaging Monitor of the Ionosphere) with stellar occultation observations in the far ultraviolet, can provide unique information about the composition and structure of Earth's upper atmosphere. Unlike in the UV, the atmospheric attenuation of X-rays is relatively insensitive to the chemical composition of the gas (i.e. whether atomic or molecular, nitrogen or oxygen), and can be used in both day and night conditions. Therefore, atmospheric occultation measurements with the USA experiment complement the upper atmospheric measurements made with GIMI and HIRAAS (High Resolution Airglow / Aurora Spectrograph). 11) 12) 13) 14) 15) 16)

USA conducts feasibility tests of X-ray satellite navigation and new computational approaches to autonomous parameter estimation that includes GPS inputs and a variety of redundant truth measures. X-ray attitude determination consists of directing an X-ray sensor at a field in the sky and comparing the detected sources with expectations based on the known maps of that field. The offset between the map and the observed pattern gives an error signal. Attitude is determined in inertial space. USA employs the method of two gimballed sensors to obtain the full attitude solution with X-ray sources. -Satellite position determination is made in X-rays by observing transitional events such as horizon crossings or occultations of stars with known positions.
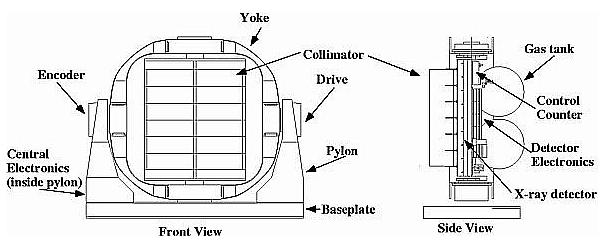
The USA instrument design is based on the use of large-area proportional-counter detectors in the energy range of 1-15 keV. The detector assembly is mounted on a two-axis pointing system, which allows the detector to be pointed at celestial targets of interest during the space flight mission. The USA instrument is a reflight of the X-ray detectors on Spartan-1 (Shuttle flight STS-51G, June 17-24, 1985). Key characteristics of the USA instrument are:
• Long observing times on bright X-ray objects
• Large-area detectors with high time-resolution capability (area: 2000 cm2, telemetry: 40 kbit/s with 128 kbit/s available for short periods; 1 µs time resolution (time is provided by the GPS receiver); USA also receives the output of the ring laser gyro package.
• Low-energy response (down to 1 keV)
• High flexibility in data handling.
There are reasons why X-ray navigation might prove to be attractive in the future. The advantages are associated mainly with drawbacks of optical methods or with potential advantages of X-ray characteristics that have no exact analogs in the optical wavelengths. These include:
• The ability to operate in wavelengths in which the ground cannot be seen, thereby removing any hazard of blinding by ground-based lasers
• Freedom from difficulties of dealing with scattered sunlight or the bright Earth
• Capability of performing multiple tasks (position, attitude, and timekeeping) with a single sensor
• Horizon sensing in wavelengths where only the upper atmosphere is traversed by a ray grazing the effective horizon, removing weather problems and making possible simple (smart) horizon sensors
• Feasibility of high-accuracy attitude sensing without optics
• Exploitation of a simpler sky in which many bright sources are available without distraction from nearby sources that are only slightly fainter
• Exploitation of spectral features of bright non-optical sources, such as the periodic intrinsic variability of many bright X-ray sources
• Straightforward exploitation of lunar occultations of celestial sources.
In addition, three radiation-hardened 32-bit space computers [RH32 (of Rome Laboratory, Rome, NY) and RH3000 (Harris)] are part of the USA platform. They are being space-qualified by performing real-time fault-tolerant applications. Both boards have full access of the full downlink telemetry data stream. A software package provides fault-tolerant features for the detection of in-flight transient errors.
ESEX (Electric Propulsion Space Experiment)
The objective is to address the DoD spacelift and maneuvering requirements for global surveillance and communications orbits and the application of advanced technology in order to reduce life cycle costs. ESEX (built by TRW Space and Electronics Group as prime contractor and by Aerojet of Redmond, WA - and managed by Phillips Laboratory of USAF) demonstrates high-power ammonia arcjet propulsion technology (reliable arcjet thruster operation) for orbit transfer, maneuvering capability, and attitude adjustment. With a power input of 30 kW and a mass of 450 kg, ESEX is so far the largest electric propulsion system to orbit.
ESEX is instrumented with various sensors to address all of the expected interactions with ARGOS including electromagnetic interference, contamination, and radiated thermal loading. The performance of the arcjet is also to be measured using ground tracking, an on- board GPS receiver, and on-board accelerometer. In addition to the performance and spacecraft interaction studies, ground-based spectroscopic and radiometric measurements are being used to observe plume species as well as determine the effect of the arcjet firing on the space environment (characterization of the arcjet's electromagnetic and visual signature).
The new ESEX arcjet system offers the potential to not only control the satellite's position but also to insert it into various orbits or even move the satellite efficiently from one position to another.
The results demonstrated that the critical system components (including the arcjet, power processor, and propellant system) operated well, and verified the interoperability of high power electric propulsion with generic satellite operations. Images of the thruster plume at 656 nm confirm predictions that the luminescent plume in the space environment is more diffuse and compact than the plume from a thruster operated in the laboratory at higher background pressure. 17) 18) 19)
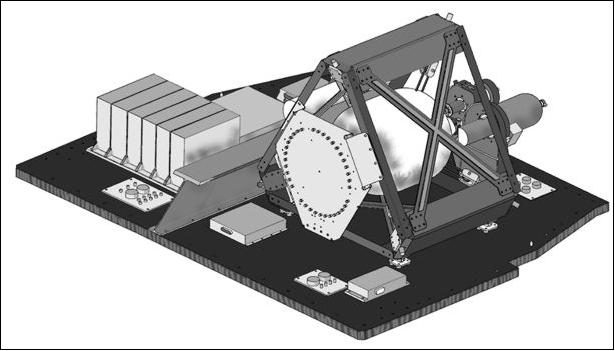
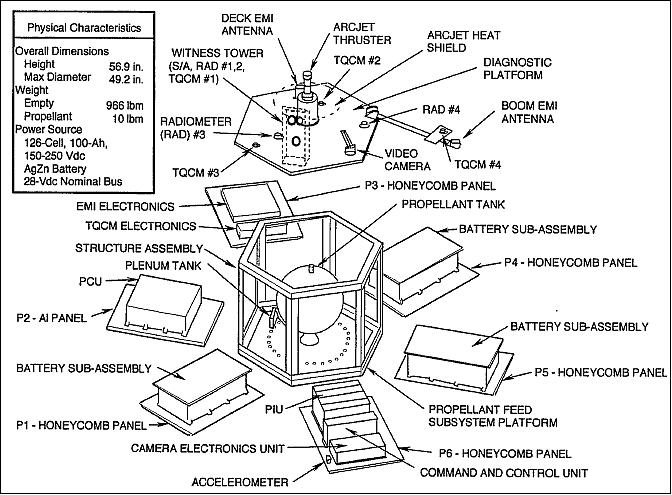
The ESEX flight system (Figure 7) includes a PFS (Propellant Feed System), a power subsystem - including the PCU (Power Conditioning Unit) and the Ag-Zn batteries, command and telemetry modules, the onboard diagnostics, and the arcjet assembly. ESEX was designed and built as a self-contained experiment to minimize the impact of any effects from the arcjet firings on ARGOS. This design allowed ESEX to function somewhat autonomously, requiring ARGOS support only for attitude control, communications, radiation-hardened data storage, and housekeeping power for functions such as battery charging and thermal control. 20)

SPADUS (Space Dust Experiment)
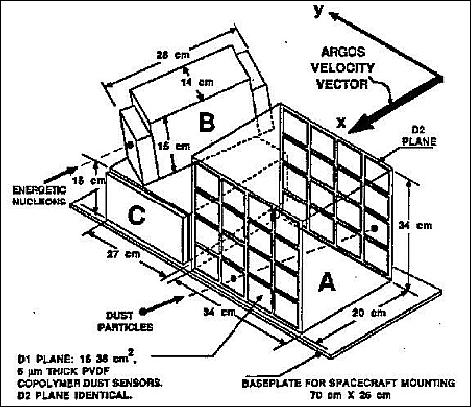
A small ONR (Office of Naval Research) sponsored instrument (built by the University of Chicago Enrico Fermi Institute, Laboratory for Astrophysics and Space Research) with the objective to measure and to characterize orbital debris and dust in the LEO environment of highly populated sun-synchronous orbits. Generation of 3-D survey maps of the present dust distribution. SPADUS also includes ancillary diagnostics to measure the local radiation environment. The experiment results are expected to help spacecraft shielding and electronics design, extending space vehicle lifetimes. Instrument mass of 23 kg. 21) 22) 23)
Single sensor | 36 cm2, 6 µm thick PVDF copolymer |
Particle mass (10 km/s) | 5 x 10-12 g (Dp = 2 µm) to 1 x10-5 g (Dp = 200 µm) |
Particle velocity | 1 to 10 km/s with 1 to 4% error. Greater error for velocity > 10 km/s |
Particle trajectory | Mean angular error of 7º for isotropic dust flux |
Sensitive area of D1 array (16 sensors) | 0.058 m2 |
Geometry factor for isotropic dust flux | a) D1 array -- 0.18 m2 sr |
Field of view (full cone) | a) 180º for flux |
Low resolution Pulse-Height-Analysis | 32 channels for each of 32 dust sensors |
High resolution Pulse-Height-Analysis | 2000 time points, 8-bits/point, each of 4 channels |
Expected impact rate | a) ~2/day to 20/day (flux) |
CIV (Critical Ionization Velocity)
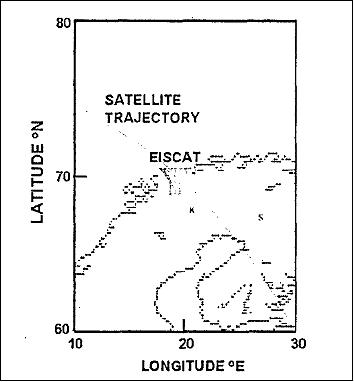
A PL (Phillips Laboratory) experiment with the objective to release Xenon and Carbon Dioxide to study ionization caused by plasma and collision processes in the upper atmosphere. CIV makes also use of the gas releases by the reactive control system of ARGOS to measure/identify the plumes and atmospheric wakes. 24)
In the CIV experiment on ARGOS, Xenon gas was released in the ram direction from the satellite into the ionosphere. The experiment took place in sunlight at about 11:00 L.T., 800 km altitude, and over the EISCAT radar, Tromsø, Norway, Oct 20, 2000 (Figure 11).
HIRAAS (High-Resolution Airglow/Aurora Spectroscopy)
Objective: test of a new technique for ionospheric and thermospheric remote sensing. An NRL instrument package with the objective to measure the naturally occurring thermospheric and ionospheric airglow (environmental model improvement for predicting effects of the ionosphere on communications).
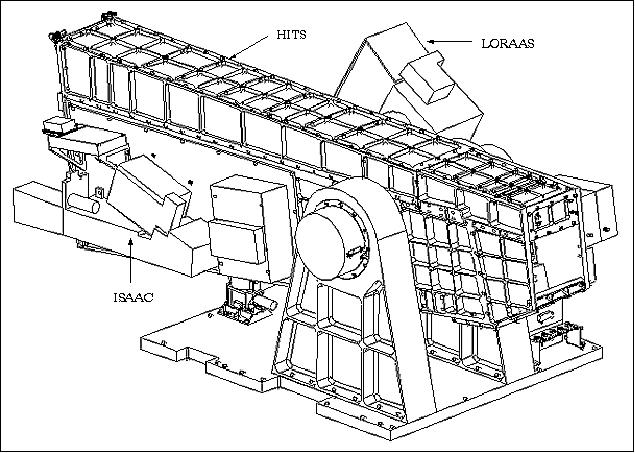
HIRAAS is a multi-instrument experiment package containing three UV spectrographs (HITS, LORAAS, and ISAAC) to measure naturally occurring atmospheric emissions. The three instruments look into the same direction and operate in parallel. The science objectives of HIRAAS experiment are to measure, by remote sensing, the densities and temperatures of the various upper-atmospheric atoms, molecules, and ions, and how they vary with altitude, position over the Earth, and solar activity. The gases to be measured include O2, O, O+, N2, N, NO, and H. 25)
A limb scan is performed in the aft orbit direction from -10º to -37º relative to the S/C horizon corresponding to tangent altitudes from 750 km to 50 km (90 s per downward scan, 15 s flyback). The imagery of the ionosphere obtained is “hyperspectral” at wavelengths from 50 to 310 nm. An essential element of these investigations involves comparisons with ground-based ionosondes and radars to provide ground truth for remote sensing observations.
• HITS (High Resolution Ionospheric/Thermospheric Spectrograph). The goal is to measure FUV (Far UV) radiation in the spectral range is from 50 - 170 nm at a resolution of 0.03 nm. HITS features a 1 m focal length Rowland Circle spectrograph fed by a telescope consisting of a parabolic mirror coated with silicon carbide for maximum reflectivity in the EUV. The spectrograph uses a 4800 l/mm grating. A grating drive mechanism rotates and translates the grating to select 10 nm segments within the 50-170 nm total passband and maintains focus and resolution at each position. The HITS spectrograph uses a MCP (Microchannel Plate) detector with a wedge-and-strip readout anode and a cesium iodide photocathode. The detector format provides a one-dimensional spectrum with 1024 pixels in the dispersion direction once per second. The HITS spectrograph resolution of 0.03 nm is sufficient to resolve the fine structure of atomic and ionic multiplets (a multiplet refers to a spectrum line of several components) and the rotational structure of molecular bands. For example the O+ 83.4 nm multiplet is a triplet emission (83.267, 83.333, 83.447 nm) and with the HITS resolution all three components are resolved. Separating the three lines provides additional information for ionospheric remote sensing since the multiple scattering opacity varies with each line. Each line provides a solution to the ion density in a different opacity regime.
• LORAAS (Low Resolution Airglow/Aurora Spectrograph). Measurement of the FUV (Far UV) in the 80-170 nm range. The LORAAS instrument is a 0.25 m focal length Wadsworth spectrograph with a stepper motor controlled scan mirror, mechanical grid collimator, grating and wedge-and-strip detector. Both the scan mirror and grating are coated with silicon carbide for maximum efficiency in the EUV. The scan mirror sweeps the FOV across the limb and is synchronized with the HIRAAS scan mechanism. The detector is coated with CsI and produces a linear array spectrum with 256 pixels in the dispersion direction once per second. LORAAS provides the entire 80-170 nm spectrum at moderate resolution (1.5 nm) while HITS measures subsets at high resolution. The LORAAS instrument is an exact copy of the SSULI (Special Sensor Ultraviolet Limb Imager) spectrograph that flies operationally on the DMSP Block 5D3 weather satellite series. Since the ARGOS satellite has an orbit similar to the DMSP satellites, LORAAS and HITS provide a validation and engineering test of the SSULI concept.
• ISAAC (Ionospheric Spectroscopy & Atmospheric Chemistry spectrograph). ISAAC measures in the mid-UV band from 180-310 nm. The ISAAC instrument is a modified 1/8 m Ebert-Fastie spectrograph fed by an off-axis telescope. The ISAAC detector is an intensified diode array which uses a microchannel plate stack, Cs2Te photocathode, phosphor and fiber optic reducer. The spectrograph uses a stepper motor to select a 25 nm portion of the 180-310 nm passband. The ISAAC spectral resolution of 0.25 nm is sufficient to resolve the rotational structure of a number of molecular bands from which the temperature of the lower thermosphere and ionosphere can be determined. Additionally, the major molecular ion in the F1- and E- region of the ionosphere is NO+, and ISAAC can measure several bands of NO from which models will be used to infer the lower ionospheric distribution.
The HIRAAS measurements test a new technique for ionospheric and thermospheric remote sensing. Extreme UV imaging of the ionosphere is required to improve a number of DoD systems that depend on radio and microwave propagation through the upper atmosphere and ionosphere. Neutral density measurements support standing NORAD operational requirements to improve satellite drag forecasting and the ability to predict orbital life and re-entry impact locations. The end product is an improved environmental model for predicting effects of the ionosphere on communications and eventually a “weather” prediction of the upper atmosphere for operational use.
GIMI (Global Imaging Monitor of the Ionosphere)
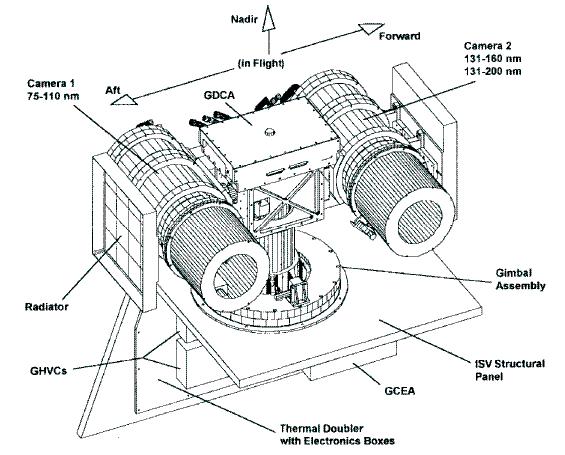
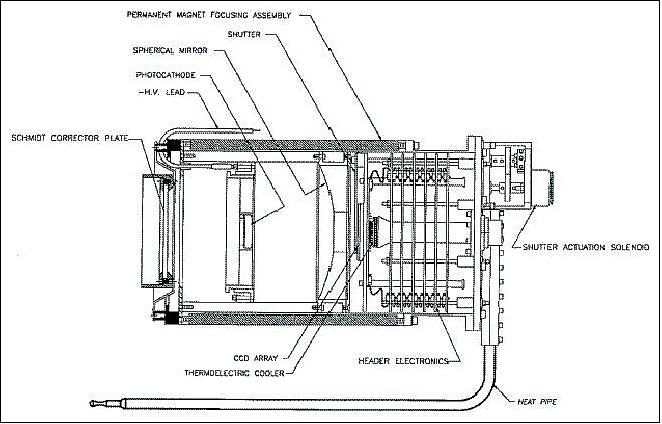
An NRL sensor (PI: G. Carruthers) with the primary objective to map and monitor the ionospheric O+ and electron density on a global basis, day and night, by wide-field imaging of ionospheric far-ultraviolet emissions. A secondary objective is to map and monitor neutral upper atmospheric constituents, specifically N2, O2, and NO. The first two are measured by observing the occultation of UV-bright stars. NO is measured by observing the UV night airglow emissions. Astronomical objectives of GIMI include obtaining an all-sky survey of both point and diffuse sources in the spectral range of 131-200 nm, and of point sources in the range of 92-110 nm. GIMI is mounted on the Earth-facing (nadir) panel of the ARGOS satellite to view the Earth limb and other directions in the zenith angle range 70.25 to 135.25º. The instrument consists of two wide-field UV imaging cameras, using electron-bombarded CCDs (EBCCDs), mounted on a two-axis gimbal system for nadir observations. The two cameras are co-aligned to permit simultaneous UV observations. 26) 27)
• GIMI camera 1 observes in the 75-110 nm range (EUV) and has a 10º square FOV. It is used primarily for observing O+ emissions at 83.4 nm in the day airglow, and stellar occultations in the 92-110 nm range for measurements of upper atmospheric N2. It is also used for observing stars and other astronomical objects in the 92-110 nm range.
• The GIMI camera 2 observes in the 131-160 nm and 131-200 nm spectral ranges (FUV). The camera photocathode is split into two regions (using different materials). The 131-200 nm range provides a FOV of 3.3º x 10º when viewing Earth, whereas the 131-160 nm range portion uses a FOV of 6.7º x 10º. Both spectral ranges are used to measure O2 by observing stellar occultations. The longer range near 190 nm is used to observe NO nightglow emissions, the shorter range at 135.5 nm observes ionospheric O+ recombination emissions.
Astronomical sky surveys are made using both ranges of camera 1. Camera 2 is used only at night (in Earth shadow), while camera 1 can be used day and night. The GIMI gimbal system allows the cameras to point in a zenith angle range from 75º to 135º in the orbit plane (forward or aft). The cameras may also be gimbaled in the yaw direction (cross track) to observe auroras and other phenomena of interest. Observations of the moon and known stars are also used for in-flight calibration of GIMI.
For observations of the upper atmosphere and ionosphere, the cameras are pointed at a zenith angle of 112º (22º below horizontal), in which case the line of sight has a 300 km tangent altitude (altitude of closest approach of the line of sight to Earth). Repeating sequences of exposures are used to cover a continuous strip of up to 120º.
The HIRAAS, GIMI and EUVIP instruments on the ARGOS S/C provide a powerful remote sensing exploration of the global ionosphere. This unusual combination of hyperspectral imagers and imagers provides a unique database of global structure and variability of ionospheric structure.
Students (high school and college) have been involved in nearly all aspects of the design, development, and testing of GIMI prior to launch, and will likely continue to be involved after launch (in mission operations and data analysis). During the actual mission, it is planned that students will be able to access GIMI data by way of the Internet, in a manner similar to that of the Moonlink education and public outreach program associated with the Lunar Prospector mission, which is implemented by Space Explorers, Inc.
Note: NRL reported that the first ever far-ultraviolet (FUV) image of a meteor had been obtained by GIMI. The image was taken on November 18, 1999. 28)
CERTO (Coherent Radio Topography Experiment)
CERTO is a coherently emitting radio beacon operating at 150 and 400 MHz. CERTO is an NRL sensor with the objective to test and develop tomographic algorithms for reconstruction of ionosphere densities and irregularities. The experiment consists of a stable three-frequency radio beacon and radiating antenna mounted on the spacecraft. Receivers on the ground use differential phase techniques to derive the integrated electron density (two-dimensional maps of the electron densities in the ionosphere). The CERTO measurement technique provides images of the ionosphere with 10 km vertical and horizontal resolution. In addition, ionospheric irregularities of 1 km or less in size can be determined by fluctuations in the CERTO radio waves. 29) 30)
CERTO data analysis permits an impact assessment on navigational accuracy, communication systems, and remote sensing by radar. CERTO can also be used to calibrate the ionospheric densities obtained using the EUV instruments such as HIRAAS, GIMI, and EUVIP on ARGOS. The CERTO radio-based technique has the advantage of higher spatial resolution than provided by the EUV-based techniques, but it requires ground-based receivers aligned under the satellite orbit.
References
1) “ARGOS Satellite Serves as Platform for Leading-Edge Technology and Research,” Jan. 6, 1999, URL: http://www.boeing.com/news/releases/1999/news_release_990106a.html
2) B. L. Wilkerson, B. J. Wilder, “The Advanced Research And Global Observation Satellite (ARGOS) end-to-end test,” AIAA Space Technology Conference and Exposition, Albuquerque, NM, Sept. 28-30, 1999, AIAA-1999-4677
3) Information provided by SMC Public Affairs of Los Angeles, CA
4) Kent S. Wood, “The NRL Program in X-ray Navigation,” Proceedings of the 29th Annual AAS GNC 2006 (Guidance & Navigation Conference), Breckenridge, CO, USA, Feb. 4-8, 2006, AAS 06-029
5) Daron R. Bromaghim, “Battery Failure on the Electric Propulsion Space Experiment (ESEX),” Special Report, November 2001, AFRL-PR-ED-TR-2001-0027, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ada399479
6) Special issue of IEEE Transactions on Microwave Theory and Techniques, Vol. 44, No 7, July 1996, pp. 1193-1392
7) T. G. Kawecki, G. A. Golba, G. E. Price, V. S. Rose, W. J. Meyers, “The high temperature superconductivity space experiment (HTSSE-II)design, IEEE Transactions on Microwave Theory and Techniques, Vol. 44, No 7, July 1996, pp. 1198-1212
8) R. A. McKnight, M. F. Bahrain, et al., “On-Orbit Status of the High Temperature Superconductivity Space Experiment (HTSSE-II), AIAA-99-4486, 1999
9) W. G. Lyons, D. R. Arsenault, et al., “High-Tc Superconductive Wideband Compressive Receivers,” The Lincoln Laboratory Journal, Vol. 9, No 1, 1996, pp.32-64
10) http://www.nrl.navy.mil/pao/pressRelease.php?Y=1999&R=1-99r
11) K. S. Wood, G. Fritz, P. Hertz, W. N. Johnson, M. N. Lovelette, M. T. Wolff, E. Bloom, G. Godfrey, J. Hanson, P. Michelson, R. Taylor, H. Wen, “The USA Experiment on the ARGOS Satellite: A Low Cost Instrument for timing X-ray Binaries,” The Evolution of X-ray Binaries, eds. S. S. Holt & C. S. Day, AIP Proceedings No. 308, pp. 561-564 (1994), URL: [web source no longer available]
12) K. S. Wood, “Navigation Studies Utilizing the NRL-801 Experiment and the ARGOS Satellite,” Small Satellite Technology and Applications III, ed. B. J. Horais, SPIE Proceedings vol. 1940, 1993, pp. 105-116,
13) P. S. Ray, K. S. Wood, G. Fritz, P. Hertz, M. Kowalski, W. N. Johnson, M. N. Lovellette, M. T. Wolff, D. Yentis, R. M. Bandyopadhyay, E. D. Bloom, B. Giebels, G. Godfrey, K. Reilly, P. Saz Parkinson, G. Shabad, P. Michelson, M. Roberts, D.A. Leahy, L. Cominsky, J. Scargle, J. Beall, D. Chakrabarty, Y. Kim, “The USA X-Ray Timing Experiment,” arXiv:astro-ph/9911236v1, Nov. 13, 1999, URL: http://arxiv.org/PS_cache/astro-ph/pdf/9911/9911236v1.pdf
14) “ARGOS Mission Seeks New Information about Black Holes and Neutron Stars,” March 4, 1999, URL: http://www.slac.stanford.edu/grp/ek/research/argusarticle/argos.html
15) D. Tournear, E. Raffauf, E. D. Bloom, W. Focke, B. Giebels, G. Godfrey, P. M. Saz Parkinson, K. T. Reilly, K. S. Wood, P. S. Ray, M. T. Wolff, R. M. Bandyopadhyay, M. N. Lovellette, J. D. Scargle, “X-ray Bursts in Neutron Star and Black Hole Binaries from USA and RXTE Data: Detections and Upper Limits,” URL: [web source no longer available]
16) K. S. Wood, G. Fritz, P. Hertz, W. N. Johnson, M. P. Kowalski, M. N. Lovellette, M. T. Wolff, D. J. Yentis, E. Bloom, L. Cominsky, K. Fairfield, G. Godfrey, J. Hanson, A. Lee, P. Michelson, R. Taylor, H. Wen, “The USA Experiment on the ARGOS Satellite: A Low Cost Instrument for timing X-ray Binaries,” SPIE Proceedings, Vol. 2280, p. 19 1994, URL: [web source no longer available]
17) L. K. Johnson, G. G. Spanjers, D. R. Bromaghim, J. R. LeDuc, R. M. Salasovich, J. A. Zimmerman, A. M. Sutton, J. M. Fife, W. H. Hargus, R. A. Spores, “On-orbit optical observations of the ESEX 26 kW ammonia arcjet,” AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, 35th, Los Angeles, CA, June 20-24, 1999, Paper No: 99-2710
18) D. R. Bromaghim; J. R. LeDuc; R. M. Salasovich; G. G. Spanjers; J. M. Fife; M. J. Dulligan; J. H. Schilling; D. C. White; L. K. Johnson , “Review of the Electric Propulsion Space Experiment (ESEX) Program,” Journal of Propulsion and Power, Vol.18 No.4, 2002, pp. 723-730, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA517682
19) A. M. Sutton, “Overview of the Air Force ESEX Flight Experiment,” URL: [web source no longer available]
20) D. R. Bromaghim, J. R. LeDuc, R. M. Salasovich, J. A. Zimmerman, D. C. Matias, A. M. Sutton, G. G. Spanjers, J. M. Fife, W. A. Hargus, R. A. Spores, L. K. Johnson, M. J. Dulligan, S. F. Engelman, J. H. Schilling, D. C. White, “An Overview of the On-Orbit Results from the ESEX Flight Experiment,” AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, 35th, Los Angeles, CA, June 20-24, 1999, Paper No: AIAA 99-2706, URL: http://www.dtic.mil/cgi-bin/GetTRDoc?AD=ADA406095
21) A. J. Tuzzolino, R. B. McKibben, J. A. Simpson, S. BenZvi, H. D. Voss, H. Gursky, “The Space Dust (SPADUS) instrument aboard the Earth-orbiting ARGOS spacecraft: I-instrument description,” Planetary and Space Science, Vol. 49, Issue 7, June 2001, pp. 689-703
22) A. J. Tuzzolino, T. E. Economou, R. B. McKibben, J. A. Simpson, S. BenZvi, L. Blackburn, H. D. Voss, H. Gursky, “Final Results from the Space Dust (SPADUS) Instrument flown aboard the Earth-orbiting ARGOS spacecraft, Planetary Space Science, Vol. 53, 2005, pp. 903-923
23) Taylor University. URL: [web source no longer available]
24) Shu T. Lai, I. Häggström, G. Wannberg, A. Westman, W. J. McNeil, D. Cooke, L. Wright, K. Groves, A. Pellinen-Wannberg, “A Critical Ionization Velocity Experiment on the ARGOS Satellite,” 45th AIAA Aerospace Sciences Meeting and Exhibit, January 8-11, 2007, Reno, Nevada, USA, AIAA 2007-279, URL: [web source no longer available]
25) http://www.nrl.navy.mil/tira/Projects/HIRAAS4/
26) G. R. Carruthers, T. D. Seeley, “Global Imaging Monitor of the Ionosphere (GIMI): a Far Ultraviolet Imaging Experiment on ARGOS,” SPIE Proceedings, Vol. 2831, 1996, p. 65
27) G. R. Carruthers, T. D. Seeley, K. K. Shephard, M. A. Finch, “Pre-flight and in-flight calibrations of the global imaging monitor of the ionosphere (GIMI) on the Advanced Research and Global Observation Satellite (ARGOS),” Proceedings of SPIE, Vol. 4485, 2002, pp. 316-327, 'Optical Spectroscopic Techniques, Remote Sensing, and Instrumentation for Atmospheric and Space Research IV,' Allen M. Larar; Martin G. Mlynczak; Eds.
28) “NRL Instrument Makes First UV Observation of Meteor in Space,” Feb. 9, 2000, URL: http://www.nrl.navy.mil/pao/pressRelease.php?Y=2000&R=9-00r
29) P. A. Bernhardt, R. P. McCoy, K. F. Dymond, J. M. Picone, R. R. Meier, F. Kamalabadi, D. M. Cotton, S. Charkrabarti, T. A. Cook, J. S. Vickers, A. W. Stephan, L. Kersley, S. E. Pryse, I. K. Walker, C. N. Mitchell, P. R. Straus, Helen Na, C. Biswas, G. S. Bust, G. R. Kronschnabl, T. D. Raymund, “Two-dimensional mapping of the plasma density in the upper atmosphere with computerized ionospheric tomography (CIT),” Physics of Plasmas, Vol. 5, Issue 5, May 1998, pp. 2010-2021
30) P. A. Bernhardt, C. A. Selcher, G. Bust, “The Coherent Electromagnetic Radio Tomography (CERTO) experiment on ARGOS,” Proceedings of the AIAA Space 2001 Conference and Exposition, Albuquerque, NM, USA, Aug. 28-30, 2001, AIAA-2001-4665