Argo - Data Collection in the Global Oceans
EO
Ocean colour instruments
Ocean
Ocean colour/biology
Quick facts
Overview
| Mission type | EO |
| Agency | Argo |
| Mission status | Operational (nominal) |
| Launch date | 21 Jun 1999 |
| Measurement domain | Ocean |
| Measurement category | Ocean colour/biology, Surface temperature (ocean), Ocean topography/currents, Ocean surface winds, Ocean wave height and spectrum, Ocean Salinity |
| Instrument type | Ocean colour instruments, Other, Data collection |
| CEOS EO Handbook | See Argo - Data Collection in the Global Oceans summary |
Argo - Data Collection in the Global Oceans
Argo is an internationally coordinated partnership program directed at deploying a global autonomous array of temperature/salinity profiling floats in the oceans. By 1997, it was apparent that the existing float technology provided the capability to sample the oceans globally, and that there was a strong scientific rationale centered on climate for implementing a global array. The AST (Argo Science Team), constituted in 1998, was a joint creation of the WCRP (World Climate Research Program) which is jointly sponsored by WMO (World Meteorological Organization), ICSU (International Council of Scientific Unions), and IOC (Intergovernmental Oceanographic Commission) of UNESCO. The Argo international ocean program is part of of the following programs: a) GCOS/GOOS (Global Climate Observing System/Global Ocean Ocean Observing System), b) CLIVAR (Climate Variability and Predictability Experiment), and c) GODAE (Global Ocean Data Assimilation Experiment).
The overall objectives are to install a long‐term continuous monitoring system to:
1) Obtain a quantitative description of the evolving state of the upper ocean
2) Use the data to interpret altimetric observations of the sea surface
3) Initialize and validate climate forecast models (the patterns of ocean climate variability, including heat and freshwater storage and transport).
The plans call for a deployed Argo network by 2005 that will consist of an array of about 3,000 free‐drifting (Lagrangian) profiling floats, capable of surveying the upper 2000 m of the world's oceans. As such, Argo represents part of an integrated global observation strategy. 1) 2)
The name Argo, from Greek mythology, was chosen to emphasize the strong complementary relationship of the global ocean float array with the spaceborne Jason altimeter mission (launch Dec. 7, 2001) as well as other altimeter missions. The need for the Argo network is based on newly gained knowledge of ocean‐surface variability from altimeter missions, in particular from the TOPEX/Poseidon mission of NASA/CNES (launch Aug. 10, 1992).
International planning for Argo, including sampling and technical issues, is coordinated by the Argo Science Team (AST). Nations having Argo plans (2001/2) which include float procurement or production include: Australia, Canada, China, Denmark, EC (European Commission), France, Germany, India, Japan, Korea, New Zealand, Spain, UK, and USA. Combined deployments from these nations are expected to exceed 700 floats per year by 2003. 3) 4) 5) 6) 7) 8)
Conceptually, the Argo network is a descendent of the WOCE (World Ocean Circulation Experiment) hydrographic float program [observations started in 1990 and went through 1997], TOGA (Tropical Oceans and Global Atmosphere, a 10‐year international program 1985‐95), and XBT (Expendable Bathythermograph) sampling networks (which started in the 1970s - during the 1990's about 40,000 XBT profiles have been collected to 450 m or 750 m depth per year). Large‐scale float deployments in the Pacific, Indian and Atlantic Ocean were integral to the WOCE sampling strategy. These networks accumulated a wealth of information on the ocean's role in climate variability through heat storage and heat transport; however, serious limitations to further advances included poor spatial and temporal coverage over much of the globe, insufficient depth range and accuracy of XBT data, and a lack of systematically repeating salinity measurements.
The Argo network extends the spatial and temporal coverage, depth range and accuracy of its predecessors, enhancing them through the addition of salinity measurements. A major breakthrough of the float family occurred in WOCE, when floats were developed that could repeatedly cycle to the ocean surface from their mid-depth drift pressure. This surfacing feature enabled global satellite tracking and communication, and by the late 1990s, CTD (Conductivity Temperature Depth) sensors were added to the instruments to collect vertical profiles of temperature and salinity.
In addition to profile information collection, the float trajectories determine the absolute flow field at a reference depth. The new generation of Argo floats can have a profile depth that is different from the parking depth, and both can be variable from profile to profile. The Argo measurements of temperature, salinity, pressure and reference velocity, together with sea surface height from satellite altimetric data, form a dynamically complete description of the upper ocean.
The Argo floats are equipped with CTD sensors, an in situ measurement technique providing the capability to collect vertical profiles of temperature, salinity and density. The measurement of conductivity (i.e., how easily an electric current passes through the water sample being tested) is a highly accurate means of determining salinity. The conductivity, temperature, and density measurements are essential ocean parameters for understanding a wide range of phenomena - ranging from biology to ocean currents. A standard CTD cast, depending on water depth, requires two to five hours to collect a complete set of data.
A typical Argo float has a mass of about 25-30 kg. Buoyancy is adjusted by pumping oil in and out of a bladder. This increases or decreases the float's volume, changing its density and causing the rise or fall through the water. The float's ballast and bladder are tuned prior to deployment for a prescribed depth (down to 2000 m). To minimize costs, floats are deployed by research vessels that happen to be going to or past target areas. 9) 10)
Floats
Background on Floats
The idea of using neutrally buoyant floats to measure sub-surface ocean currents was first developed in the mid-1950s by Henry Stommel (1955) in the USA (WHOI) and by John Swallow (1955) in the UK. The first floats were built and tested by Swallow and consisted of pressure cases made of aluminium scaffold tube that were less compressible than sea water and that were tracked by obtaining bearings from an attendant ship on the floats' free-running 10 kHz sound source.
The Argo float is a descendent of this invention. Argo's roots are tied to WOCE (World Ocean Circulation Experiment) program (1990-1997) which used about 1000 ALACE (Autonomous Lagrangian Circulation Explorer) floats to measure the global subsurface circulation. As WOCE progressed in its global hydrographic survey, float technology evolved from measuring circulation only (Pacific Ocean) to the addition of temperature profiles (Indian Ocean) and finally to CTD profiles (Atlantic Ocean). 11)
Early in 1998, the International Steering Team for GODAE endorsed the broad concept of a global array of profiling floats to be linked to the Jason altimeter satellites and undertook to develop a plan. CLIVAR also considered these two proposals and gave them high priority in its implementation plan.

The OceanObs'99 conference (Oct. 18-22, 1999, Saint Raphael, France) provided a first international forum of all communities involved in the Ocean Observing System for Climate (known as OceanObs '99). The conference sought the consensus needed for this step, addressing the collective needs of both research and operational oceanography. The deployment of the Argo array, a pilot program of GOOS with a planned array of 3000 floats, was considered a critical element for the development of the observing system (Ref. 1). 12)
General Float Design
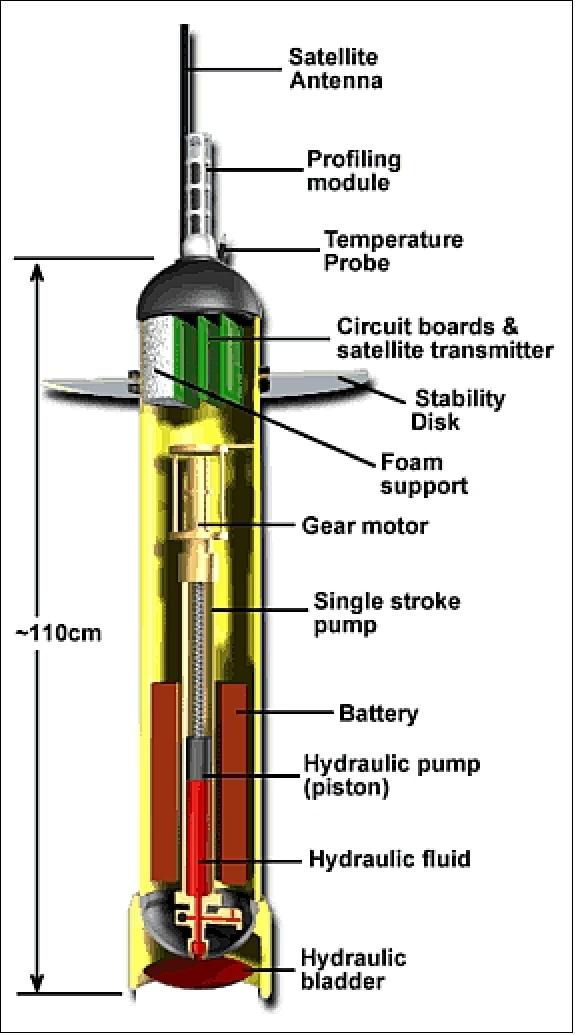
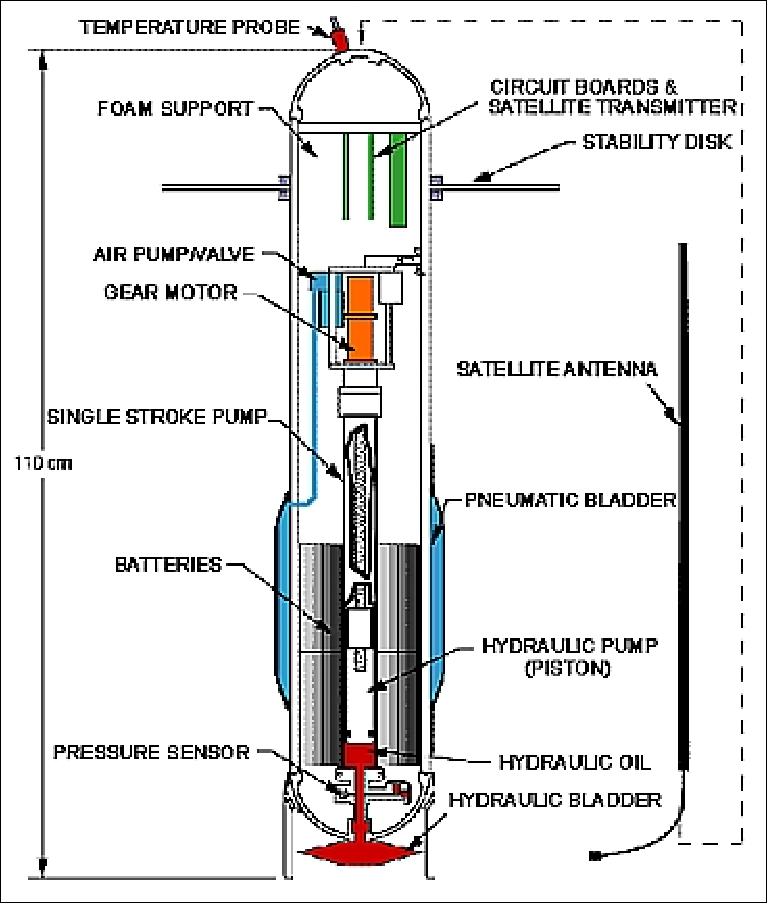
A critical capability of an Argo float is its ability to rise and descend in the ocean on a programmed schedule. The floats do this by changing their effective density. The density of any object is given by its mass divided by its volume. The Argo float keeps its mass constant, but by altering its volume, it changes its density. To do this, a piston is used to push mineral oil out of a float and expand a rubber bladder separating the oil from the ocean water. As the bladder expands, the float becomes less dense than seawater and rises to the surface. Once its tasks at the surface are completed (data communication to a spacecraft), the float then withdraws the piston and descends again.
An autonomous Argo float (Figure 1) is comprised of three subsystems:
• Hydraulics: control buoyancy adjustment via an inflatable external bladder, so the float can surface and dive
• Microprocessors: deal with function control and scheduling
• Data transmission system: controls communication with satellite.
Power is provided by a battery. The mass of a typical float is approximately 25-30 kg.
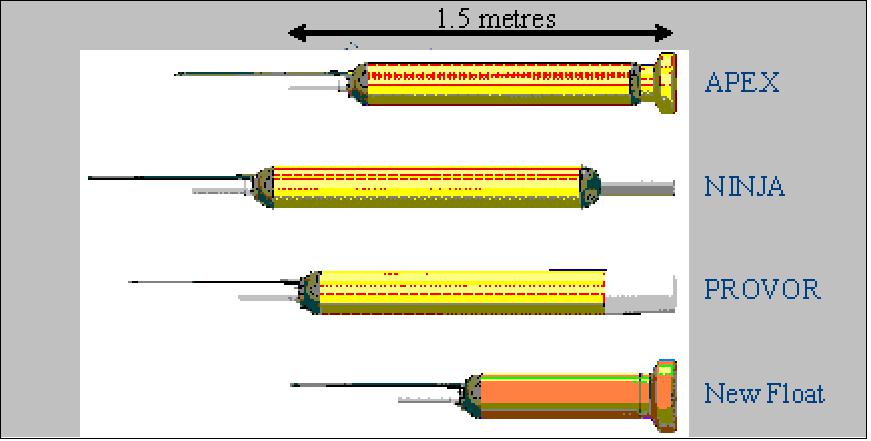
Argo Float Models/Types
• ALACE (Autonomous Lagrangian Circulation Explorer) of NOAA/AOML. ALACE floats take ocean measurements of temperature when they are floating at depth. ALACE floats do not acquire data when they are descending or ascending, and this results in a data gap, especially when strong currents push the float a significant distance during ascent or descent. 14) 15) 16)
• SOLO float, designed and built by the Scripps Institution of Oceanography, La Jolla, CA, USA. SOLO is also built at WHOI (Woods Hole Oceanographic Institution), MA. The SOLO float is of WOCE design heritage. The Argo version of SOLO was improved resulting in longer float lifetimes. Further improvements call for GPS navigation and two-way Iridium communication.
• PALACE (Profiling ALACE) of NOAA/AOML. PALACE and SOLO floats can measure temperature plus salinity (conductivity) and pressure (depth), and take these measurements as they rise to the surface. SOLO floats are very similar to PALACE floats, but have better satellite communication and acoustic tracking capabilities.
• PROVOR float of IFREMER (developed through industrial partnership with MARTEC company), France. The profiler executes identical programmed cycles of descent, drift at depth at a given pressure for a few days, descent to the start of profile depth, raising, Argos data transmission. 17) 18)


• APEX (Autonomous Profiling Explorer) float, produced by WRC (Webb Research Corporation), East Falmouth, MA, USA. APEX is considered a successor of the ALACE and PALACE; they are commercially available. Two APEX versions were built: 1) APEX-180. This float was introduced in 1999 and had a maximum displacement of 180 ml of fluid. This allowed the float to cycle between depths of 1000 m and the sea surface in the subarctic and subtropical regions of the world ocean. 2) APEX-260. This float, with 260 ml displacement, was first tested in 2000 m and is now the float being used in essentially all Argo applications.
• NINJA float of JAMSTEC (Japan Marine Science and Technology Center), a Frontier Research Center for Global Change, Yokohama, Japan.
New Technology Introduction
The capabilities of the newer Argo floats are constantly being improved to increase the performance of the sensors, to add other sensors (SST, SSS, O2, wind speed, rainfall, etc.), and/or test new communication methods (Iridium). 21)
- Oxygen sensors of type SBE-43/IDO of SBE (Sea-Bird Electronics) Inc., Bellevue, WA, USA, have been deployed on several ARGO floats to test how accurately oxygen can be measured over the anticipated 5-year life of a float. The first oxygen-equipped float was deployed at the Hawaiian Ocean Time series (HOT) site, 100 km north of Oahu, in August 2002. The SBE-43F oxygen sensor is an optimized Clark electrode integrated into the exhaust stream of an SBE-41 CTD mounted to an APEX float. 22) 23)
- There are plans to modify the CTD sensor on floats to measure SST (Sea Surface Temperature). This will be done by adding a 2nd thermistor outside of the CTD tube that will collect samples at 1 m intervals between the depth of 20 m and the sea surface. First test in 2006. Polarographic oxygen sensors have been deployed on Argo floats since at least as early as 2002.
- Published studies have also demonstrated the feasibility of a new instrument technology, the oxygen optode, taking advantage of dynamic luminescence of luminophores, which fluoresce with a dependence on the O2 concentration (the optode senses dissolved oxygen by optical methods). For example, two prototype oxygen optode instruments were deployed on autonomous floats in the Labrador Sea in September 2003 and data collected over the following year showed very promising results demonstrating the required accuracy and stability. The optode device is being manufactured by Aanderaa of Bergen, Norway. 24)
- Following the International Repeat Hydrography and Carbon Workshop (Nov. 14-16, 2005, Shonan Village, Japan), a small group was established to develop plans and proposals for a large-scale extension of the current small-scale deployments of Argo floats instrumented with O2 sensors.
Operational Scenario of Argo Floats
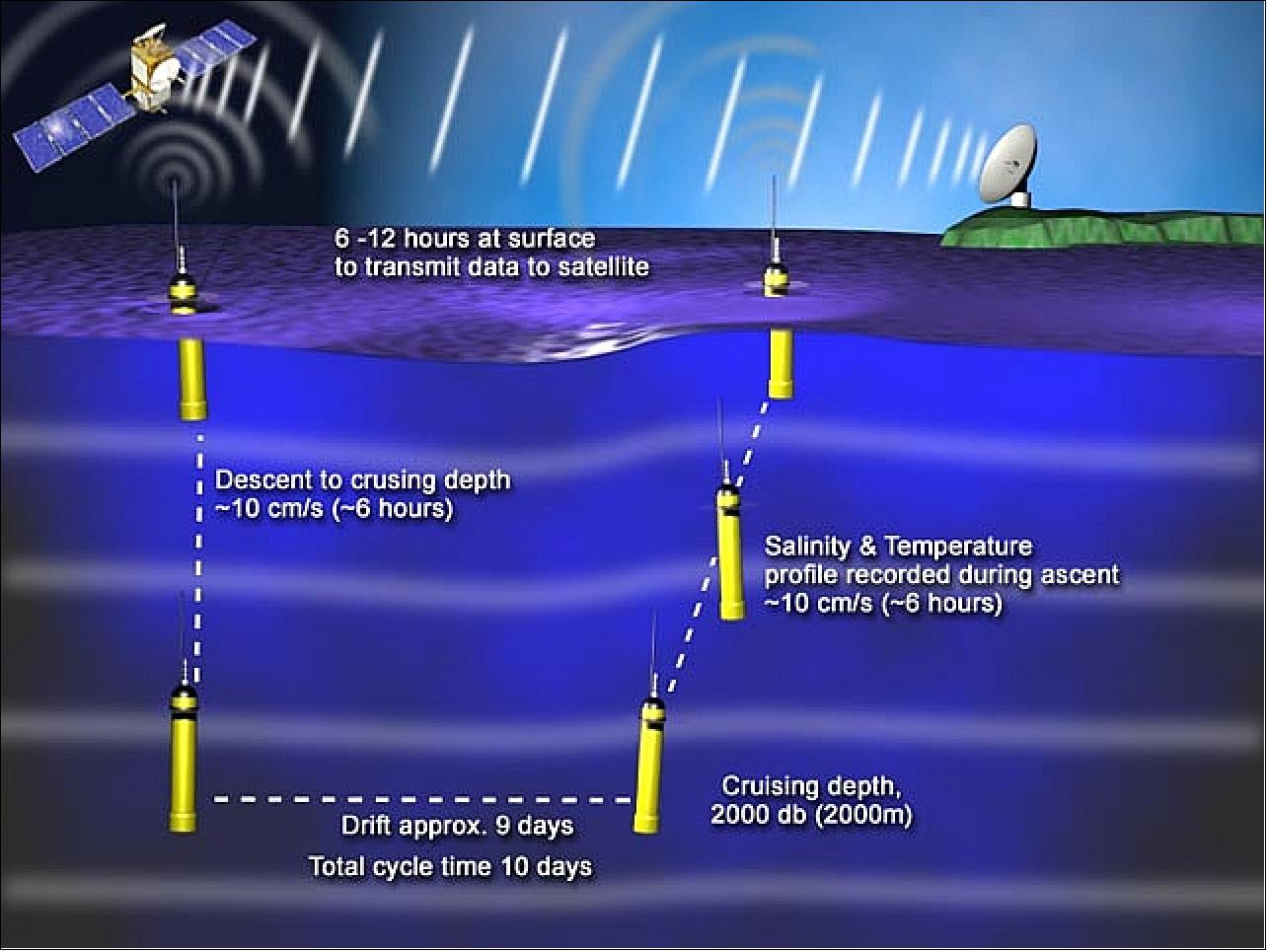
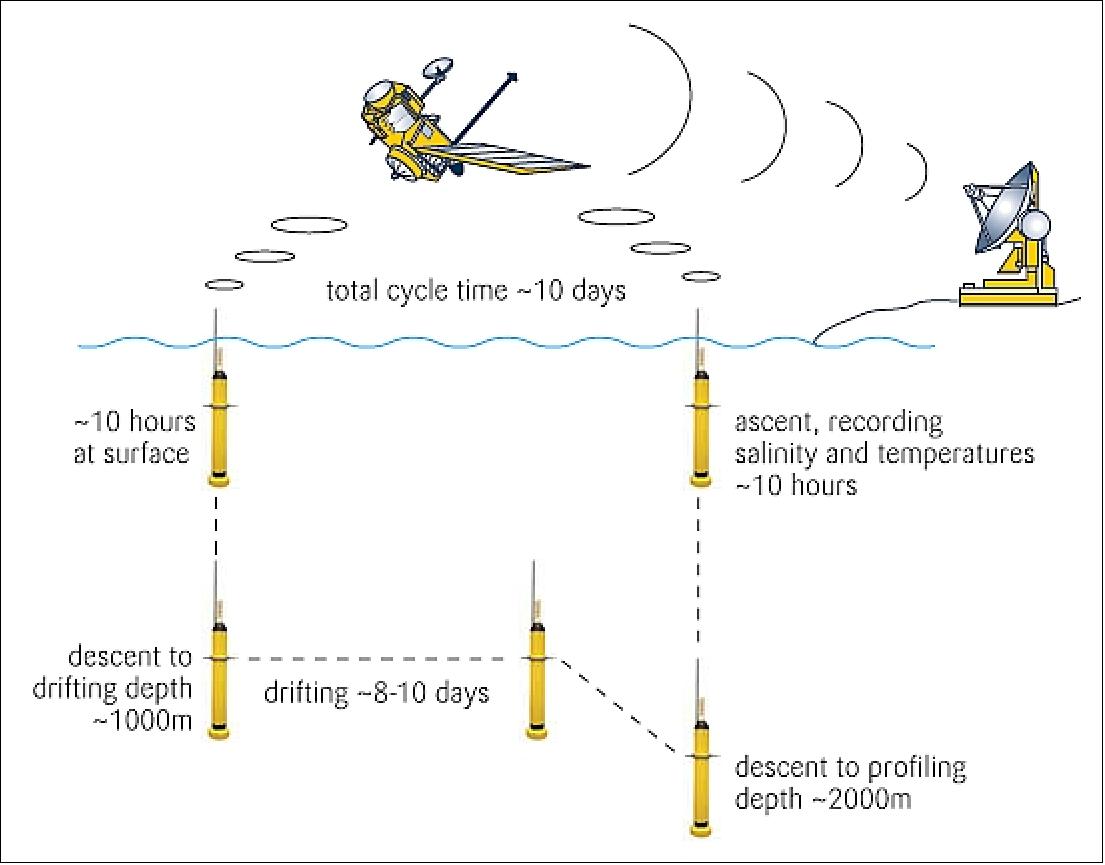
Various participants in the Argo program have designed different floats, but all the devices operate on similar principles. The following text describes a servicing cycle of an Argo float:
After deployment on the ocean surface, the float sinks to a prescribed drifting depth (1000 to 2000 m), typically it remains at this depth for 10 days, at the end of this period it rises to the surface collecting temperature and salinity data, it remains at the surface while transmitting position and profile data to a satellite. It then returns to the prescribed resting depth, completing the cycle and starting a new one. The floats can also be configured remotely to another prescribed resting depth. A mean lifetime of 4 years represents the design criteria for the floats. With a 10‐day cycle, a float will thus provide approximately 150 T/S (Temperature/Salinity) profiles during it's mean lifetime.
An average spacing of 3º in latitude and longitude (a grid) is the initial target of the international Argo program. An operational life of at least 10 years of Argo data collection will provide a rich harvest of accomplishments. This includes:
• The availability of an unprecedented data set for model initialization, data assimilation and testing of the next generation of global ocean and coupled models
• Realistic operational near realtime global ocean forecasting ‐ for the first time
• An accurate global climatology, with error bars and statistics of variability
• Large‐scale constraints for atmospheric model‐derived surface heat and fresh water fluxes
• Determination of the dominant patterns of evolution of interannual variability in temperature and salinity for analysis of coupled modes of air/sea interaction.
Distributing the floats evenly around the globe could turn out to be somewhat problematic, given that some countries want to place their floats in specific regions. The North Atlantic and the North Pacific oceans are expected to fill up fast, it is harder to populate the Indian and Southern (Antarctic) oceans. The float‐providing nations have agreed to populate the world ocean as their highest priority, rather than concentrating on regional arrays. The information gathered by Argo will change our understanding of the world's oceans, opening in fact a new era of oceanography.
Argo floats are mostly being deployed by Volunteer Observing Ships (VOS), aircraft, naval ships and research vessels. VOS deployments have been successfully implemented and aircraft deployment has been demonstrated. Dedicated use of research vessels will be minimized due to high cost.
Three recent developments make Argo a key step for oceanography and climate science.
1) Development of the profiling float makes it feasible to observe the physical state of the ocean (T, S and reference level velocity) on a regular basis anywhere in the world. This is particularly significant because it means that heat and freshwater storage in the global air‐sea‐land climate system, both of which are dominated by oceanic variability, can be measured accurately for the first time.
2) The availability of precision satellite altimeters, measuring sea surface height globally every 10 days, creates a compelling rationale for complementary in situ data sets to better interpret the surface measurement.
3) The maturation of data assimilation capabilities ‐ including developments in both hardware and assimilation techniques ‐ provides a framework to integrate the subsurface and remotely sensed surface data sets in a dynamically consistent fashion. The data requirements include wind and air‐sea flux forcing (heat and precipitation minus evaporation) as well as the oceanic response‐sea level variability and its subsurface counterparts.
Argo Data System
Collection
As of the start of the 21st century, Argo data collection is being conducted via a network of existing data collection satellites. The current floats communicate through a combination of the ARGOS and ORBCOMM systems. In addition, global cellular networks are being examined as possible future options. Greater bandwidth is needed than the present ARGOS capability so that floats can transmit more data while remaining on the sea surface for a shorter period of time. Some items/issues of the data collection procedure include:
• Data quantity: Present profiles include about 50 T‐S pairs, with variable data precision depending on depth. The aim is to improve profiles to about 500 T‐S pairs with 0.001 precision. This requires 2 kbyte of data per profile (in compressed formats), allowing 2 m depth intervals from 0 to 500 m and 5 m intervals from 500 to 2000 m.
• Time spent on the sea surface: Present instruments remain on the sea surface for 12‐24 hours to allow multiple ARGOS satellite passes. The target for future improvement is 1 hour or less. Minimizing this time will lower risk to the instrument and its sensors (i.e. biofouling) as well as decreasing the displacement of the float by surface currents. The time required for profile communication also directly affects the 'age' of real‐time data.
• Power consumption: The target is for communications to consume <10% of the energy budget per cycle (or <1 kJ). In this regard, satellite systems that acknowledge receipt of data are desirable, eliminating the need for multiple transmissions.
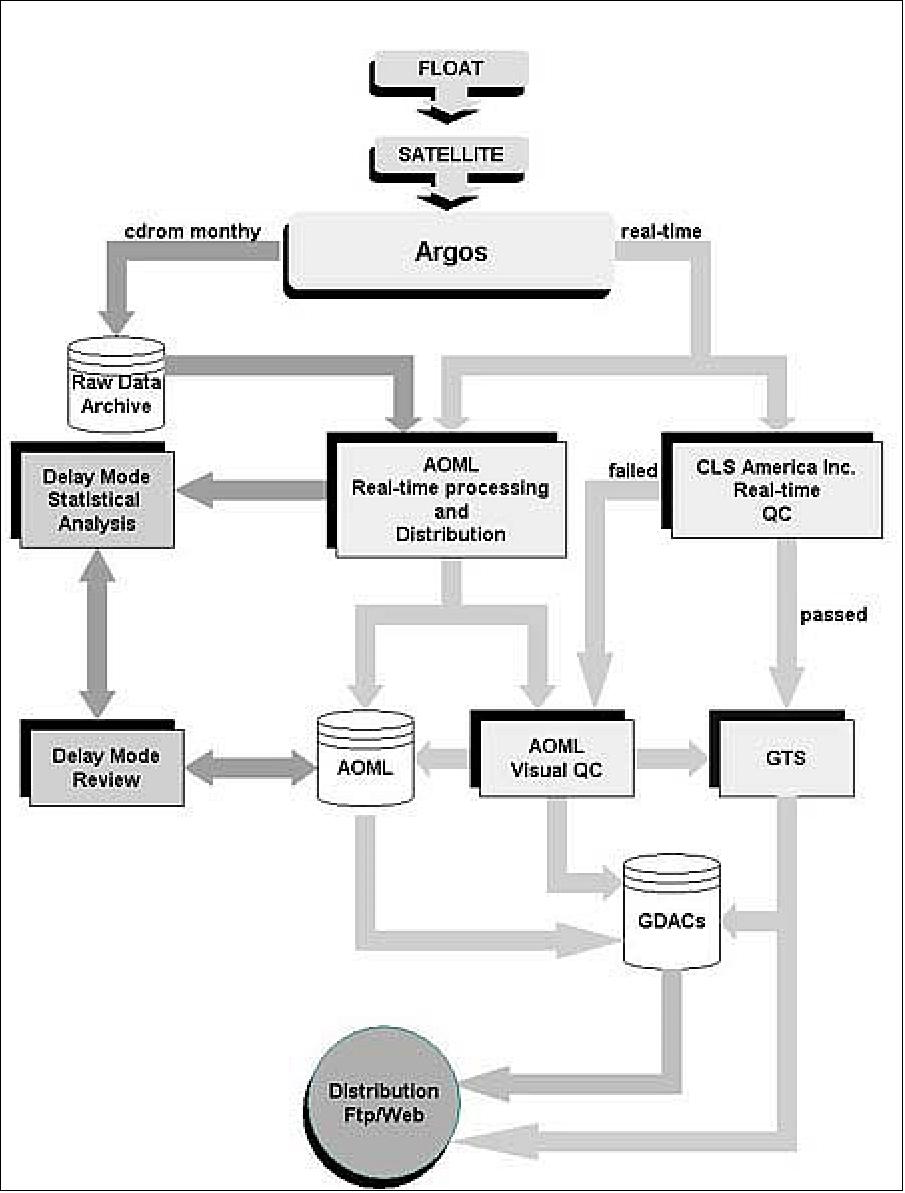
Distribution
From the data collection satellites, the Argo data is relayed to DACs (Data Acquisition Centers). Initial DACs are at NOAA/AOML (Atlantic Oceanographic and Meteorological Laboratory, Miami, FL), NOAA/OCO (Office of Climate Observation, Silver Spring, MD), IFREMER (French Ocean Agency in Brest, France), and JMA (Japanese Meteorological Agency) in Tokyo. Data can be accessed by the user community from the GDAC (Global DAC) at IFREMER. 26) 27) 28)
National DACs are regularly reporting to the GDAC. Some national DACs are: BODC (British Oceanographic Data Centre), UK; CSIO (China Second Institute of Oceanography), China; CSIRO (Commonwealth Science and Industrial Research Organization), Australia; INCOIS (Indian National Centre for Ocean Information Services), India; JMA (Japan Meteorological Agency), Japan; KMA (Korea Meteorological Agency), Korea; MEDS (Marine Environmental Data Services), Canada; NOAA/AOML (NOAA/Atlantic Oceanographic and Meteorological Laboratory), USA;
- NODC (National Oceanographic Data Center), at NOAA/NESDIS, Silver Spring, MD, and at Monterey, CA, USA. The NODC operates the long-term archive, also known as the Global Argo Data Repository (GADR), for Argo data.
- CORIOLIS is a data service for operational oceanography operated by IFREMER [Institut Francais de Recherche pour L'Exploration de la Mer), the French Ocean Agency in Brest, France. CORIOLIS contributes to the in-situ part of the Argo system with the objective of developing continuous, automatic and permanent observation networks.
- JAMSTEC of Yokohama, Japan implemented a DAC (Data Acquisition Center) to provide two main functions: a) automated real-time data-processing of float data, and b) delayed-mode advanced quality control.
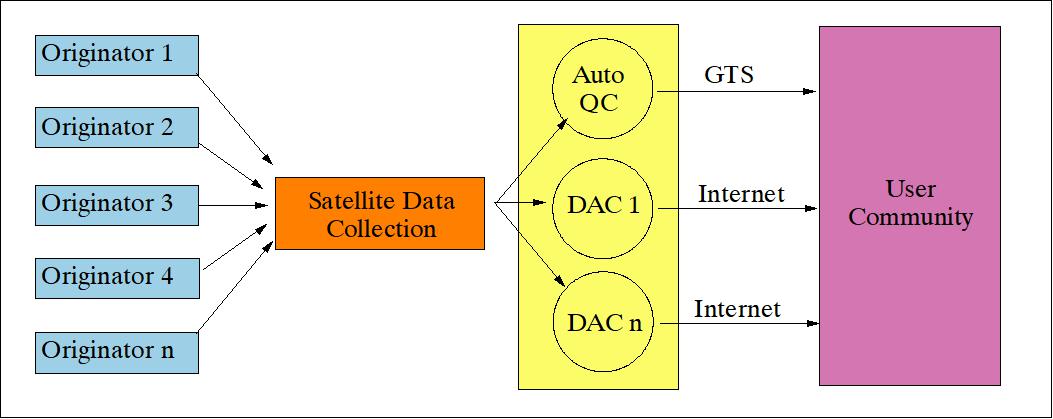
All Argo data is being publicly distributed on receipt via GTS (Global Telecommunications System of WMO) and Internet for availability to the larger user community. Timeliness of data to the end user, including real‐time automated quality control (QC checks, flagging of values and recalibration of salinity) and assurance of proper data identification by the data centers, is a major demand of the overall system. The goal is to make data available to operational users within 24 hours of collection.
GOSIC (Global Observing Systems Information Center): GOSIC is hosted at NOAA/NCDC (National Climatic Data Center) in Ashville, NC, USA. It provides an information center that facilitates the search of and access to data, data products, metadata and information for the GCOS (Global Climate Observing System), GOOS (Global Ocean Observing System), and GTOS (Global Terrestrial Observing System), and their partner programs such as the GAW (Global Atmosphere Watch) and the regional observing systems such as the GOOS Regional Alliances (GRA). 29)
The Argo Program within IGOS
Formally, Argo is a major element of GOOS (Global Ocean Observing System), a decade‐old drive by IOC (Intergovernmental Oceanographic Commission) of UNESCO (United Nations Educational Scientific and Cultural Organization). Argo is also the primary in situ data gathering component of GODAE, and part of CLIVAR. 30) 31)
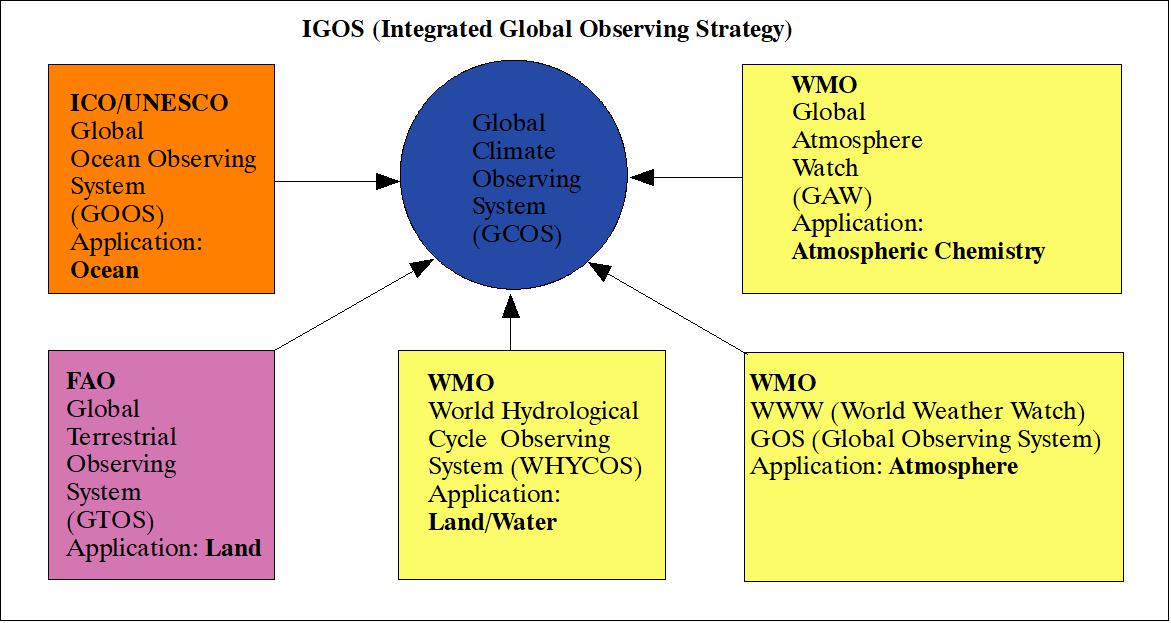
GCOS is made up of baseline networks in the following categories (with Argo firmly embedded into GOOS): 32) 33) 34)
1) Atmospheric
• GSN (GCOS Surface Network)
• GUAN (GCOS Upper Air Network)
• GAW (Global Atmosphere Watch)
2) Oceanographic
• GOOS (Global Ocean Observing System) with spaceborne and terrestrial elements
• ENSO ‐ e.g., TOGA, TAO
• Reference Stations, e.g., Sea Level
• Argo, Drifters, VOS, XBT
3) Terrestrial
• Glaciers, Permafrost
• Carbon Flux
• Hydrology
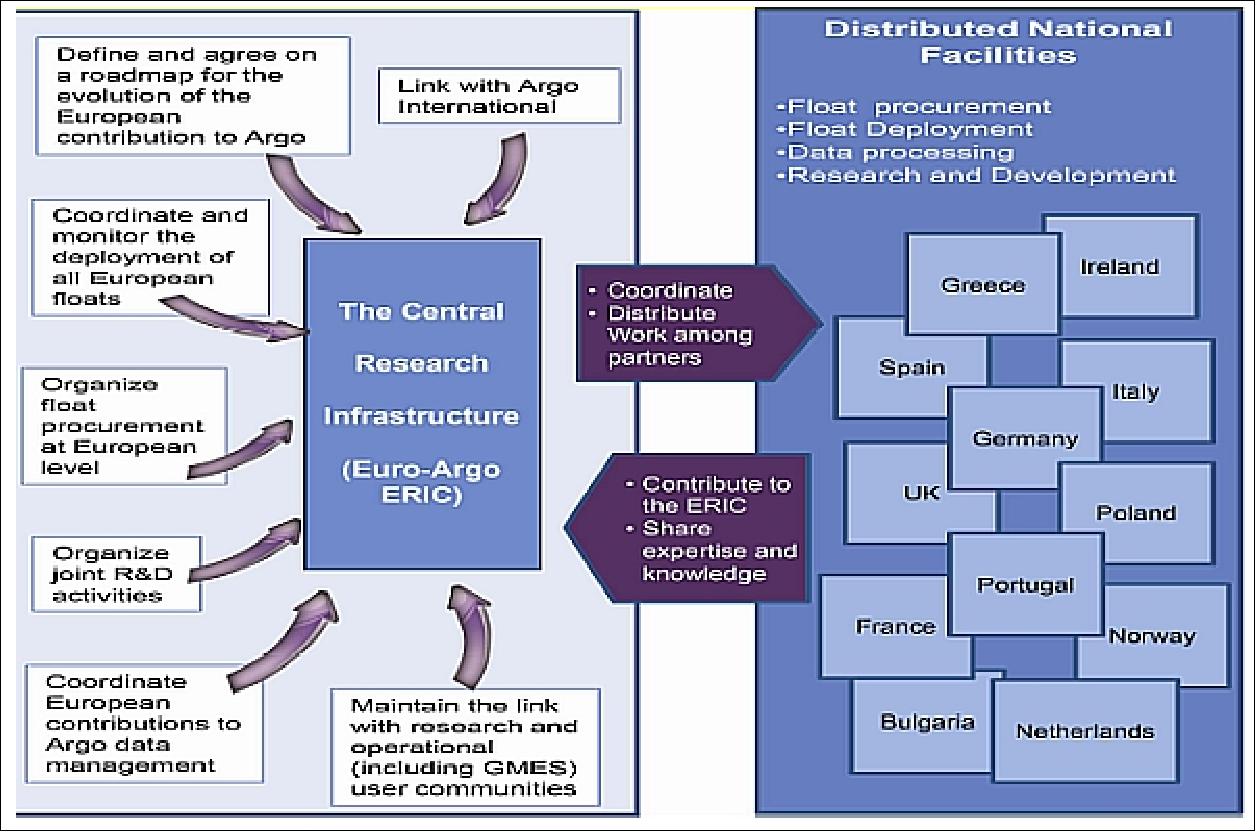
Euro-Argo Research Infrastructure (Euro-Argo RI)
As a new European research infrastructure, Euro-Argo started a preparatory phase in 2008 funded through the EU 7th Framework Research Program. The Euro-Argo preparatory phase includes all European Member States (France, United Kingdom, Germany, Ireland, Italy, Spain, Netherlands, Norway) involved in Argo and several potential new actors (Greece, Portugal, Poland and Bulgaria). The main objective of the Euro-Argo preparatory phase is to undertake the work needed to ensure that by 2010 Europe will be able to provide, deploy and operate an array of 800 floats and to provide a world-class service to the research (climate) and environment monitoring (e.g. GMES) communities. The specific objectives of the Euro-Argo preparatory phase are as follows: 35) 36) 37)
• The consolidation and strengthening of existing national contributions to the infrastructure
• The development of a direct EC-wide contribution through GMES
• The development of legal and governance arrangements for the Euro-Argo infrastructure
• Evaluation and improvement of the European contribution to the Argo data management and delivery system
• Enhancing European float technological capabilities and working towards using Argo to study aspects of ocean biogeochemistry
• The development of a vigorous European Argo user community
• Exploiting the open access to Argo data as an educational “window” on the oceans and their role in climate
• Developing new partnerships between European Argo nations, new European countries and nations outside Europe
• Integrating the European observing array into the international system
• Developing a ten year implementation plan.
ERIC (European Research Infrastructure Consortium)
To reach its objectives, Euro-Argo wishes to transfer the existing cooperative arrangements of the first Preparatory Phase (January 2008- June 2011) into a body with legal personality separate from its Members. In June 2009, the Members established ERIC which is now called the Euro-Argo ERIC. 38)
The very objective of Euro-Argo is to ensure a long-term contribution of Europe to a global ocean observing system. Euro-Argo ERIC is a building block of the GMES in-situ infrastructure component (GMES Marine Service and a future GMES Climate Service). 39)
Two phases for the Euro-Argo ERIC: 40)
• 2011-2013:
- Light structure: 1 program assistant (100%), 1 program manager (20%). Ifremer personnel seconded to the ERIC.
- Budget for missions (incl. ERIC members), workshops,WWW
• 2014+
- Structure : 1 program assistant 1 program manager (50%), 1 technician, 1 engineer/scientist (ERIC employees or seconded by members to the ERIC).
- Budget for missions (incl. ERIC members), workshops,WWW. Funding by members and observers and the European Commission (EC).
The RI (Research Infrastructure) will comprise:
• A central facility (Central RI)
• Distributed national facilities (as of today but with coordination via the C-RI)
• Distributed national facilities (as of today but with coordination via the C-RI).
The Central RI will be a European legal entity (Euro-Argo ERIC) that will be initially hosted by France. Members are governments.
Argo System Buildup and Status
• September 14, 2021: So many climate models, so little time ... A new way of measuring ocean temperatures helps scientists sort the likely from unlikely scenarios of global warming. 41)

- We’ve heard that rising temperatures will lead to rising sea levels, but what many may not realize is that most of the increase in energy in the climate system is occurring in the ocean.
- Now a study from UNSW (University of New South Wales) Sydney and CSIRO researchers has shown that a relatively new ocean temperature measuring program – the Argo system of profiling floats – can help tell us which climate modelling for the 21st century we should be paying attention to the most.
- Professor John Church from UNSW’s Climate Change Research Centre in the School of Biological, Earth and Environmental Sciences says the study published today in Nature Climate Change is an attempt to narrow the projected range of future ocean temperature rises to the end of the 21st century using model simulations that are most consistent with the Argo’s findings in the years 2005 to 2019. 42)
- “The models that projected very high absorption of heat by the ocean by 2100 also have unrealistically high ocean absorption over the Argo period of measurement,” Prof. Church says.
- “Likewise, there are models with lower heat absorption in the future that also don’t correspond to the Argo data. So we have effectively used the Argo observations to say, ‘which of these models best agree with the observations and therefore constrain projections for the future?’”
- Named after the boat which Greek mythological hero Jason travelled on in search of the golden fleece, the Argo floats are loaded with high-tech equipment that measures ocean temperatures to depths of up to 2000 meters.
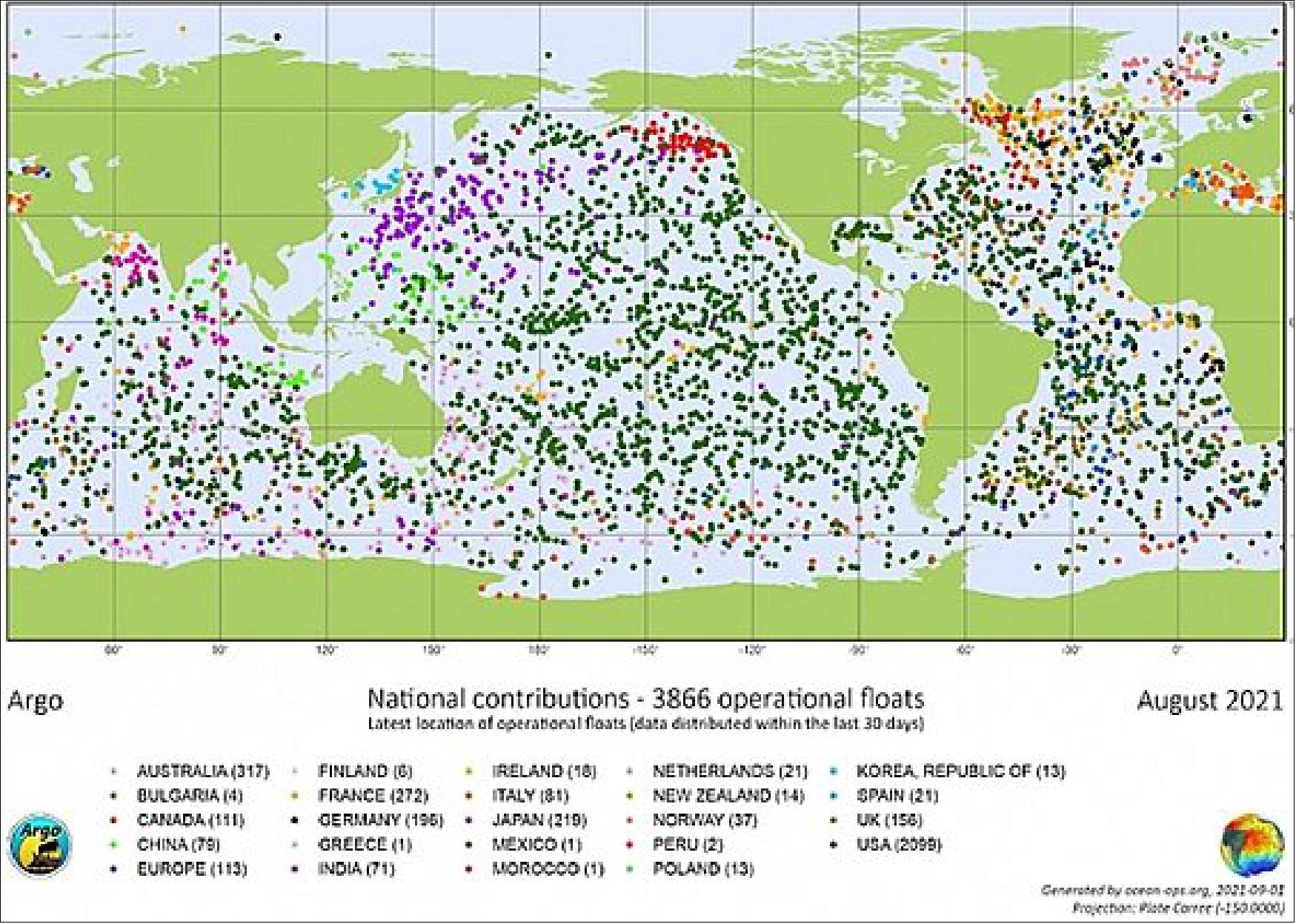
- Each Argo float sends measurements to satellites which then beams the results to analysis centers around the world. There are more than 3500 floats dispersed around the globe, with the bulk of them managed by the US (more than 2000) while Australia accounts for the next highest number of floats, numbering 317.
- Prof. Church says the Argo floats offer a new level of accuracy in temperature measurement. Not only are the high-tech instruments more reliable than in the past, but the coverage of the planet’s oceans is so much more thorough.
- “Previously we depended on research ships making very high accuracy measurements, but only in very restricted areas. Or we would get merchant ships to drop expendable instruments into the water which gave better coverage, but with much less accurate instruments.
- “Using these approaches, there were much larger gaps in the Southern Ocean because these waters were less trafficked.”
- The ubiquity of the Argo floats offers unprecedented real-time monitoring of ocean temperatures that will help oceanographers and climate scientists constrain their climate projections based on this higher resolution and accuracy of data.
The Full Story
- One of the takeaways from the team’s analysis of the Argo data is that land and air temperatures only tell part of the story about the planet’s overall heat absorption. Prof. Church says the apparent stability of temperatures in the early 21st century did not correspond with the Argo’s recording of sea temperatures in the same period.
- “More than 90 per cent of the energy trapped by greenhouse gases is stored in the ocean and only about 1 per cent in the warming atmosphere,” he says.
- “In the first decade of this century, average surface temperature didn’t increase that much. And it created a lot of room for climate sceptics to say ‘what climate change?’. But throughout that period, oceans continued to take up heat – and this is where the 90 per cent of the energy in the ocean versus the 1 per cent in the atmosphere becomes critically important in the total climate system.
- “The climate system was still increasing its overall heat content over this period.”
Climate Forecasts
- It turns out that the projections of rising air and sea temperatures by some models in a recent set of modelling in the Coupled Model Intercomparison Project (CMIP) are warming too rapidly.
- The models in CMIP5, which was completed from 2010 to 2014, fits in with the Argo observations more closely than CMIP6, which was only recently completed.
- ”Some of the 28 CMIP6 models we used were more sensitive to greenhouse gases for their projections,” Prof. Church says.
- ”Projections of climate change to the end of the century all take into account the effects of greenhouse gas emissions which are already responsible for much of the increased temperatures we’ve seen in the 20th and early 21st centuries.
- “Even if we take strong steps now to limit emissions to the upper bound of the Paris Agreement target of 2oC global surface warming, ocean temperatures are still projected to rise five to nine times the observed warming by 2081-2100, with 8 to 14cm rise in sea levels from the expansion of warmed ocean waters alone.”
- With no concerted efforts to rein in emissions, oceans are set to warm by 11 to 15 times the warming observed by Argo in 2005-2019, with sea levels projected to rise 17 to 26 cm from the expansion of warmed ocean waters alone, and further rises from the addition of water to the ocean from glaciers and ice sheets.
- Prof. Church says the Argo data has given scientists much more solid figures to work with when making projections about warming. In fact, the likely range of the constrained projections using the Argo data is 17 per cent narrower than the IPCC’s Sixth Assessment Report.
- “While a longer Argo observational period will allow us to further tighten the range of projected ocean warming and sea level rise, the Argo observations and the climate model projections already highlight the need to urgently and very significantly mitigate our greenhouse gas emissions if we are to avoid dangerous impacts of ocean warming and sea level rise.”
• March 2015: We are increasingly concerned about global change and its regional impacts. Sea level is rising at an accelerating rate of 3 mm/year, Arctic sea ice cover is shrinking and high latitude areas are warming rapidly. Extreme weather events cause loss of life and enormous burdens on the insurance industry. Globally, 8 of the 10 warmest years since 1860, when instrumental records began, were in the past decade. 43)
These effects are caused by a mixture of long-term climate change and natural variability. Their impacts are in some cases beneficial (lengthened growing seasons, opening of Arctic shipping routes) and in others adverse (increased coastal flooding, severe droughts, more extreme and frequent heat waves and weather events such as severe tropical cyclones).
Understanding (and eventually predicting) changes in both the atmosphere and ocean are needed to guide international actions, to optimize governments' policies and to shape industrial strategies. To make those predictions we need improved models of climate and of the entire earth system (including socio-economic factors).
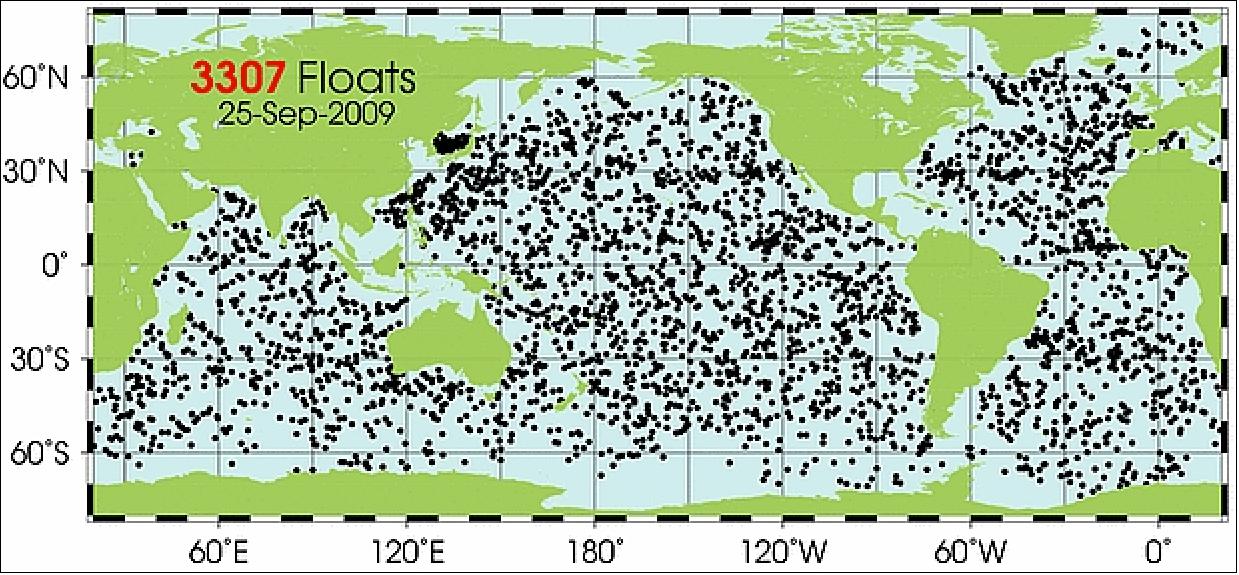
![Figure 14: Positions of the floats that have delivered data within the last 30 days in March 2015 [image credit: AIC (Argo Information Center), USCD]](https://eoportal.org/ftp/satellite-missions/a/Argo_150921/Argo_Auto3.jpeg)
• Dec. 5, 2014: There is a saying in climate science, “as the ocean goes, so goes the climate.” This phrase captures the notion that the ocean is, by far, the most powerful component and driver of the Earth’s climate system. - Yet the happenings in the ocean, especially below the surface, have been largely unknown for much of human history. Until the first deployment of Argo floats in 2000, less than 1% of the ocean below the upper few hundred meters was being monitored routinely. For a planet where oceans cover about 71% of the surface, that’s a lot of terra (or aqua) incognita. 44)
- Enter the Argo float, which many consider the greatest leap in the climate observing system since the advent of satellites 50 years ago. An Argo float is an autonomous floating robot that alternately dives and ascends through the top 2,000 m of the ocean, collecting climate observations as it goes.
- In 2007, the Argo program—an international collaboration involving more than 30 nations — achieved “full coverage,” defined as one float in every 3° x 3° square of ocean from 60°N and 60°S (outside of marginal seas). The current generation of floats are capable of operating under ice and in marginal seas. Currently more than 3,500 of these smart buoys roam the global ocean.
- Argo floats have been “one of the biggest steps forward in understanding climate-scale changes in the ocean,” says Rick Lumpkin, an oceanographer with NOAA’s Atlantic Oceanographic and Meteorological Laboratory. “ The floats provide a much more detailed view of seasonal to interannual fluctuations of upper ocean heat and salt than we had before.” Argo floats do not care about weather, operating year-round in storm-tossed seas. They also provide observations in regions such as the southern hemisphere that are rarely visited by research vessels.
- Argo data has become pivotal to research into ocean heat storage, sea level rise, natural ocean variability, and many more topics. Nearly 300 papers utilizing Argo data were published in 2013. Steve Piotrowicz, director of the Argo program since 2000, commented that “anyone studying oceanography in grad school in the ‘70s, including myself, couldn’t have envisioned anything like this in terms of how we are now able to observe the ocean and the expansion of knowledge and scientific research going on,” he says.
- As the quest for knowledge of the ocean increases, scientists are deploying new sensors for Argo floats to measure the oxygen content, ocean acidity, biogeochemical properties such as nitrates and chlorophyll and rainfall in the ocean. Other sensors under development are sensors measuring CO2 and how far light penetrates the water column. - In addition, a growing number of floats are equipped with the Iridium two-way communication system. This will reduce the time spent at the surface to as little as 30 minutes — avoiding the risk of getting caught in fishing nets and other obstacles at the surface — and accommodate greater data transmission.
- Scientists are particularly interested in using Argo observations to account for all the excess heat that has built up in the Earth’s climate system due to a build-up of greenhouse gases. Argo data has revealed that much of the heat is stored in the upper layers of the ocean, but not all of it. Researchers suspect that the rest is being stashed in the deep ocean. - Unfortunately, the current generation of Argo floats can only dive to a depth of 2,000 m; any deeper and -they would implode due to the extreme pressure in the deep ocean. But this past summer, for the first time, two next-generation Argo floats began their first trip to the bottom of the sea.
• In Feb. 2012, the global Argo array consists of 3515 floats (Ref. 49).
• The 12th Argo Data Management Meeting took place Nov. 16-18, 2011, in Seoul, Korea. The AST (Argo Steering Team) summarized the priorities of the Argo Program requiring improvement and evolution both in the short-term (1-2 years) and the longer-term (5-10 years). The short-term priorities are aimed toward completing the core Argo array, improving data quality, and sustaining Argo into the future. The definition of the core Argo array was being re-examined in response to recommendations from OceanObs09 for a more global Argo, including enhanced sampling in high latitude oceans, coverage in all of the deep marginal seas (e.g., Gulf of Mexico and Caribbean Sea), and improved spatial resolution in western boundary regions. 45)
• In 2011, the broad-scale global Argo array of temperature/salinity profiling floats has already grown to be a major component of the ocean observing system. Argo is a standard to which other developing ocean observing systems can look to. For example, Argo offers ideas on various topics such as how to collaborate internationally, how to develop a data management system and how to change the way scientists think about collecting data. Deployments began in 2000 and continue today at the rate of about 800 per year. 46) 47)
• In 2009, ten years since OceanObs'99, autonomous technologies have brought about a revolution in observational capability that lets us view the subsurface oceans in ways that are comparable to global satellite measurements of the sea surface. The next decade will see equally important advances through expanded coverage and a multi-disciplinary approach. These are not expected to come from radically new technologies, but from the use and enhancement of technologies that are now maturing and from developments in existing systems. 50) 51) 52) 53) 54)
Argo would not be possible without extensive international cooperation. A group of 45 nations, territories, unions, federations, and freely associated states worldwide participate in different aspects of Argo. Argo has helped to transform traditional methods of data collection and distribution by making oceanographic data available in real time to the physical oceanography research and operational communities.
• In late 2007, the Argo array reached its initial target of operating 3000 robotic profiling floats in the global ocean. 55) 56)
• In 2006, Argo is still a young project, but it has the milestone of completing the global 3º x 3º array in sight. The main challenge is then to sustain funding long enough to fully evaluate the array's capabilities and to optimize its design. - As of 2005, Argo data users started to combine Argo data with data of altimetry missions, as well as with other complimentary data sets, in an “integrated approach.” The wide variety of applications of this type comes from the global, repeating nature of Argo and satellite datasets and from the fact that the available measurement types span the dynamical variables of the ocean - temperature, salinity, pressure, and velocity. The integrated approach remains the challenge of the future. 57)
Following are some stations in the Argo buildup phase:
• The first Argo floats were deployed by Australia in late 1999, followed by similar regional arrays deployed by several nations.
• In early 2002, there were about 350 active floats (about 10% completion of Argo array).
• In the early years, the Argo program faced several challenges, first in scaling up production and deployment capabilities and then in overcoming technical problems that limited the lifetime of the floats unacceptably. Major improvements were made in float pumping, instrument control, and battery power subsystems, resulting in dramatic reduction of failure rates in all float models. The ability of float engineering groups to monitor and detect problems led to correction of systematic failures of pressure sensors in 2003.
• The first Argo Science Workshop took place Nov. 12-14, 2003, in Tokyo, Japan. At the time, the Argo array reached 1/3 of its planned size.
• Floats being deployed after 2003 will likely achieve the Argo interim target of a 4 year mean lifetime. Further lifetime extension is still a goal, and other technical objectives include improved satellite communications, capability for sampling under ice cover, and addition of new sensors.
• By 2004, float deployments were global and the number of deployments reached 800 per year, as required to build and sustain a 3000-float array. The number of float providing nations increased to more than 20, and many additional nations made contributions in supporting float deployment and logistics. Argo may be the most internationally collaborative program in the history of oceanography.
• A crucial and novel contribution has been a US/New Zealand collaboration that uses a 28 m research vessel with a crew of 5 for cost effective dedicated deployments. By the end of 2006, R/V Kaharoa will have deployed over 400 Argo floats in the remotest regions of the Pacific and Indian Oceans, where few commercial ships or opportunistic research vessel transits are available. As a result of the combined national contributions, Argo achieved sparse global coverage by the end of 2004.
• Nearly 900 Argo floats were deployed in 2005. The floats of the current Argo array (2006) are fairly young (with 50% < 1 year).
• As of May 2006, the Argo array contains about 2450 active instruments, representing more than 80% of completion. By the end of 2006 the array will be nearly complete and the number will level off as the program transitions from building to re-seeding and sustaining the array. During 2006 Argo will provide about 90,000 high quality CTD profiles.
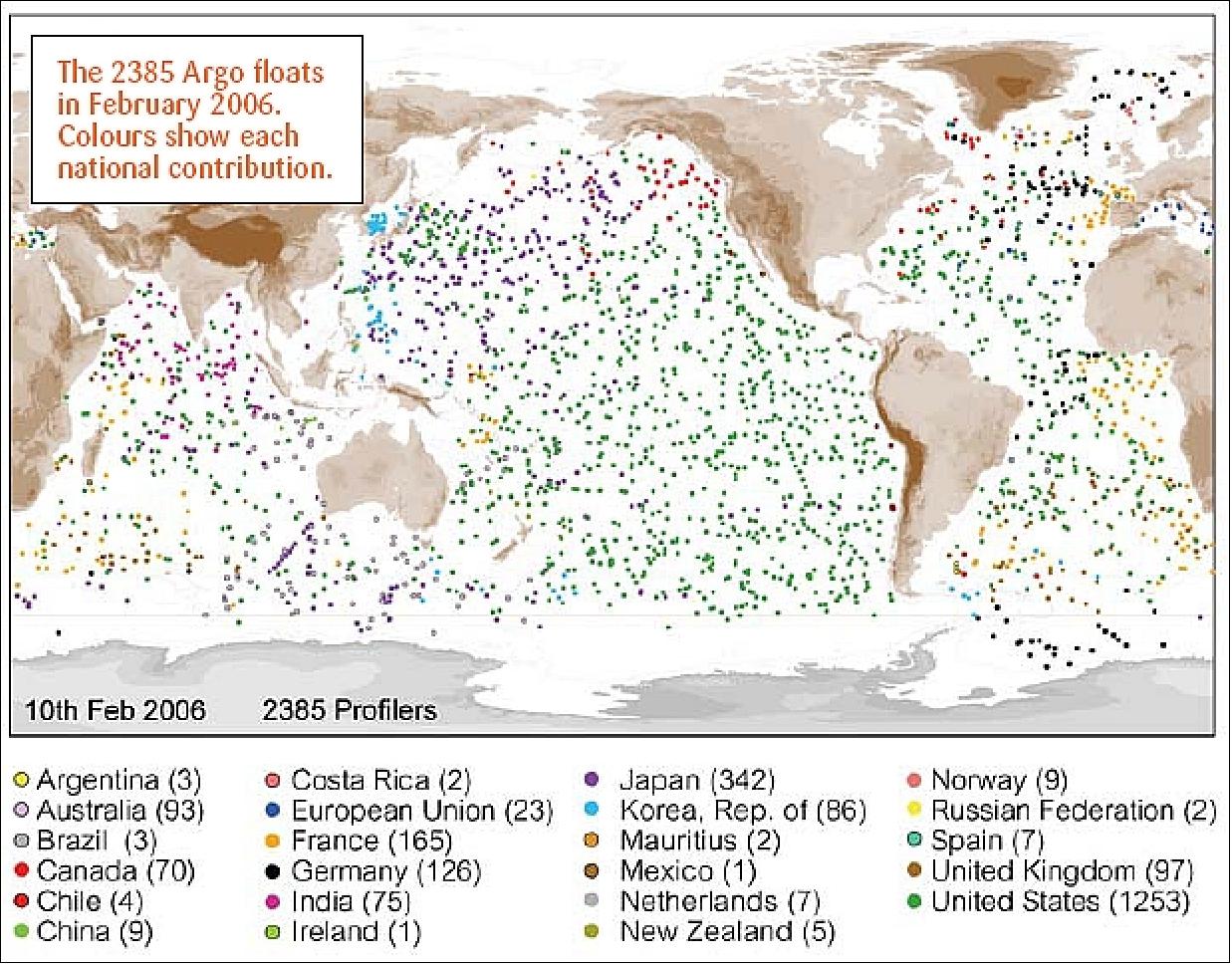
• The Argo array is made up of of contributions from 23 countries (2006), ranging from a single float to the US contribution which represents over 50% of the global array (Figure 17).
• The full Argo array of 3000 floats can be maintained - as long as national commitments provide about 800 floats per year. The need for global Argo observations will continue indefinitely.
• In parallel with the growth of the array, Argo has developed a unique data system (http://www.argo.net) to serve the requirements of a broad user community. Argo's data policy - free, immediate, and unrestricted access - is a major element in the program's international acceptance and popularity. The data are delivered in near real-time to meet the needs of operational analysis and prediction centers.
• To provide information on the constantly-changing array, float deployments and positions are being tracked through an Argo Information Center (AIC) established under the Intergovernmental Oceanographic Commission (IOC) of UNESCO. Also JCOMM (Joint WMO IOC Technical Commission for Oceanography and Marine Meteorology) is a source of Argo information. 58)
References
1) Dean Roemmich, W. Brechner Owens, “The Argo Project: Global ocean observations for understanding and prediction of climate variability,” Oceanography, Vol. 13, 2000, pp. 45‐50, URL: http://www.tos.org/oceanography/issues/issue_archive/issue_pdfs/13_2/13.2_roemmich_brechner.pdf
2) J. Gould, D. Roemmich, S. Wiffels, H. Freeland, M. Ignaszewsky, X. Jianping, S. Pouliquen, Y. Desaubies, U. Send, K. Radhakrishnan,K. Takeuchi, K. Kim, M. Danchenkov, P. Sutton, B. King, B. Owens, S. Riser, “Argo Profiling Floats Bring New Era of In Situ Ocean Observations,” EOS Transactions (AGU), Vol. 85, No. 19, May 11, 2004
3) T. Feder, “Argo Begins Systematic Global Probing of the Upper Oceans,” Physics Today, July 2000, pp. 50‐51
4) The Argo Science Team: D. Roemmich, O. Boebel, Y. Desaubies, H. Freeland, K. Kim, B. King, P.‐Y. LeTraon, R. Molinari, W. Brechner Owens, S. Riser, U. Send, K. Takeuchi, and S. Wijffels, “Argo: The Global Array of Profiling Floats,” Chapter 3.2 in “Observing the Oceans in the 21st Century,” C. Koblinsky and N. Smith editors. Bureau of Meteorology, Melbourne, 2001.
5) D. Roemmich, J. Gould, “Argo: The Integrated Approach,” Symposium: 15 Years of Progress in Radar Altimetry, Venice, Italy, March 13-18, 2006
6) “Observing the Ocean ..... in Real Time, Argo: A Global Array of Profiling Floats” Argo Brochure, 1998, URL: http://www.whoi.edu/cms/files/instruments/2006/1/ArgoBrochure_7003.pdf
7) Intergovernmental Oceanographic Commission (of UNESCO), OceanObs99 Conference Statement,” IOUINF-1137, Paris, 25 April 2000, URL: http://unesdoc.unesco.org/images/0012/001205/120594Eo.pdf
8) “Origins of Argo,” URL: http://www.argo.ucsd.edu/Origins_of_Argo.html
9) R. Dalton, “Voyage of the Argonauts,” Nature, Vol. 415, Feb. 28, 2002
10) Argo Science Team, “On The Design and Implementation of Argo,” 1998, URL: http://www.argo.ucsd.edu/argo-design.pdf
11) George Needler, Neville Smith, Andreas Villwock, “The Action Plan for GOOS/GCOS and Sustained Observations for CLIVAR,” URL: http://www.oceanobs09.net/work/oo99/docs/Needler.pdf
12) Gwyn Griffiths, Russ Davis, Charles Eriksen, Daniel Frye, Phillippe Marchand, Tommy Dickey, “Towards New Platform Technology for Sustained Observations,” OceanObs'99, Oct. 18-22, 1999, St. Raphael, France, URL: http://www.noc.soton.ac.uk/nmf/usl/gxg/OceanObs_talk.pdf
13) http://www.argo.ucsd.edu/float_design.html
14) http://www.whoi.edu/instruments/viewInstrument.do?id=9706
15) http://www.argo.ucsd.edu/How_Argo_floats.html
16) http://floats.pmel.noaa.gov/field_ops.html
17) “PROVOR CTS3,” URL: http://www.nke-instrumentation.com
/media/pdf/file3/provor%20cts%203%20_gb-1298375724.pdf
18) Serge Le Reste, “Provor Float development,” AST-9 (Argo Science Team-9) Meeting, Exeter, UK, March 18-20, 2008, URL: ftp://kakapo.ucsd.edu/pub/argo/AST9/Provor_AST9.ppt
19) H. Freeland, “Argo: A global ocean climate observatory,” http://www.clivar.org/organization/pacific/south_pac_workshop/presentations/HJF_Thursday_am.ppt#1
20) http://www.aoml.noaa.gov/phod/argo/doc/introduction.php?entry=float_design
21) Stephen C. Riser, Jeffrey Nystuen, Nordeen Larson, Doug Webb, “Float Technology Development,” URL: http://www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA476427
22) Nordeen Larson, “A Year of Oxygen Measurements from ARGO Floats,” 1st Argo Science Workshop, Tokyo, Japan, Nov. 12-14, 2003, URL: http://www.seabird.com/technical_references/ArgoPosterNov03.htm
23) “Measuring Oxygen from Argo ----- 1st Euro-Argo Users Meeting,” URL:
http://www.euro-argo.eu/content/download/21548/311160/file/15_fischer_euro_argo_01.pdf
24) A. Körtzinger, J. Schimanski, U. Send, “High Quality Oxygen Measurements from Profiling Floats: A Promising New Technique,” Journal of Atmospheric and Oceanic Technology, Vol. 22, 2005, doi: 10.1175/JTECH1701.1, URL: http://www.argo.ucsd.edu/Kortzinger_et_al_JAOT2004.pdf
25) “Argo, an array of profiling floats observing the ocean in real-time,” 2006, http://www.argo.ucsd.edu/Argo_new_.pdf
26) http://www.coriolis.eu.org//
27) http://celebrating200years.noaa.gov/magazine/argo/welcome.html#intro
28) Sylvie Pouliquen, Steve Hankins, Robert Keeley, Jon Blower, C. Donlon, Alex Kozyr , Robert Guralnick, “The development of the data system and growth in data sharing,” Proceedings of OceanObs'09, Venice, Italy, Sept. 21-25, 2009, paper: URL: http://www.oceanobs09.net/plenary/files/Pouliquen_DataSharing_PLENARY_Paper.pdf, presentation URL: http://www.oceanobs09.net/plenary/files/Pouliquen_Data_1Bc_PLENARY_Talk_vfinal.pdf
29) GOSIC, “Argo Data Access,” URL: http://www.gosic.org/goos/Argo-data-access.htm
30) Alan R. Thomas, “Global Climate Observing System (GCOS) - Overview and Results from COP-4, ” IGOS Partnership Forum during the UNISPACE III Conference, Vienna, Austria, July 21, 1999, URL: http://www.un.org/earthwatch/about/docs/igusthom.htm
31) UNESCO/IOC, Paris, Jan. 2009, URL: http://www.un.org/Depts/los/general_assembly
/contributions_2009/Intergovernmental%20Oceanographic%20Commission.pdf
32) Michael Tanner , “Global Earth Observation System of Systems Climate Societal Benefit Area ,” Geneva, Switzerland, Oct. 16, 2008, URL: http://www.wmo.int/pages/prog/gcos/scXVI/11.3_GEO_Tanner.ppt
33) Hans-Peter Plag, “GEO, GEOSS and IGOS-P: The Framework of Global Earth Observations,” URL: http://nng.esoc.esa.de/ws2006/GGOS1.pdf
34) GCOS brochure, GOOS Secretariat, Nov. 2007, “Global Climate Observing System - Ensuring the Availability of Global Observations for Climate,” URL: https://ise.unige.ch/isdd/IMG/pdf/GCOS_brochure_GoodQuality-2.pdf
35) P. Y. Le Traon and the Euro-Argo preparatory phase partners, “Argo : towards a sustained European contribution to Argo,” URL: https://abstracts.congrex.com/scripts/
jmevent/abstracts/FCXNL-09A02-1733471-1-paper-Euro-Argo-oceanobs09.doc
37) “The Research Infrastructure,” URL: http://www.euro-argo.eu/About-us/The-Research-Infrastructure
38) http://www.euro-argo.eu/About-us/The-Research-Infrastructure/Strategy
39) P. Y. Le Traon, “Euro-Argo: a Key ResearchInfrastructure for a GMES Marine and ClimateService,” Helsinki, Finland, June 17, 2011, URL: http://ec.europa.eu/enterprise/policies/space/
files/gmes/climate-change-conf-helsinki-june-2011/presentations/euro-argo-letraon_en.pdf
40) Emina Mamaca, “Euro-Argo : a new European Research Infrastructure for climate change research and operational oceanography,” Brussels, Belgium, Oct. 17, 2011, URL: http://ec.europa.eu/research
/infrastructures/pdf/workshop_october_2011/11_esfri_euroargo_masset.pdf
41) ”New ocean temperature data help scientists make their hot predictions,” UNSW newsroom, 14 September 2021, URL: https://newsroom.unsw.edu.au/news/science-tech/
new-ocean-temperature-data-help-scientists-make-their-hot-predictions
42) Kewei Lyu, Xuebin Zhang, & John A. Church, ”Projected ocean warming constrained by the ocean observational record,” Nature Climate Change,.Published:13 September 2021, https://doi.org/10.1038/s41558-021-01151-1
43) http://www.argo.ucsd.edu/index.html
44) Dale C. S. Destin, “The Argo revolution,” NOAA, December 5, 2014, URL: https://www.climate.gov/news-features/features/argo-revolution
45) “12th Argo Data Management Meeting,” Seoul, Koera, November 16-18, 2011, Version 1.3, Jan. 10, 2012, URL: http://www.argodatamgt.org/content/download/11181/74484/
file/12th%20ARGO%20DATA%20MANAGEMENT%20MEETINGV1.3.pdf.pdf
46) http://www.argo.ucsd.edu/About_Argo.html
47) “Argo Information Centre,” URL: http://wo.jcommops.org/cgi-bin/WebObjects/Argo
48) “Argonautics, Newsletter of the international Argo project,” No 12, July 2011, URL: http://www.argo.ucsd.edu/Argonautics12.pdf
50) Dean Roemmich, Lars Boehme, Hervé Claustre, Howard Freeland, Masao Fukasawa, Gustavo Goni6, W. John Gould, Niki Gruber, Maria Hood, Elizabeth Kent, Rick Lumpkin, Shawn Smith, Pierre Testor, “Integrating the ocean observing system: mobile platforms,” Proceedings of OceanObs'09, Venice, Italy, Sept. 21-25, 2009, URL: http://www.oceanobs09.net/plenary/files/Roemmich_mobile_platforms_PLENARY_Paper_v2.pdf
51) M. Belbeoch, “Argo Status,”, URL: http://www.godae.org/~godae-data
/GOVST/meetings/GOVST-I/presentations/7.2_Argo-GOVST.ppt
52) Boyin Huang, Yan Xue, David W. Behringer, “Impacts of Argo salinity in NCEP Global Ocean Data Assimilation System: The tropical Indian Ocean,” Journal of Geophysical Research, Vol. 113, 2008, C08002, doi:10.1029/2007JC004388, URL: http://www.cpc.ncep.noaa.gov/products/people/yxue/pub/17.pdf
53) M. Balmaseda, D. Anderson, A. Vidard, “Impact of Argo on analyses of the global ocean,” Geophysical Research Letters, Vol. 34, 2007, L16605, doi:10.1029/2007GL030452
54) P.Y. Le Traon and the International GODAE / GODAE OceanView Science Team, “Outline, Brief overview of GODAE, Review of impact studies in GODAE systems, Summary – role of Argo, Future of Argo from the GODAE OceanView perspective,” ASW-3 (Argo Science Workshop-3), March 25-27, 2009, Hangzhou, China, URL: ftp://kakapo.ucsd.edu/pub/argo/ASW3/thurs_am(ASW-3)/thu_am_01.pdf
55) Argo Steering Team, Aug. 8, 2008, “Argo: Global ocean observing array reaches milestone and faces challenges,” URL: http://www.ioc-goos.org/components/com_oe/oe.php?
task=download&id=4201&version=1.0&lang=1&format=1
56) Dean H. Roemmich, Russ E. Davis, Stephen C. Riser, W. Brechner Owens, Silvia L. Garzoli, Gregory C. Johnson, “The Argo Project: Global Observations for Understanding and Prediction of Climate Variability,” 2007, URL: http://www.nopp.org/wp-content/uploads/project-reports-cdrom/reports/07roemmi.pdf
57) D. Roemmich, J. Gould, “Argo: The Integrated Approach,” Symposium: 15 Years of Progress in Radar Altimetry , Venice Italy, March 13-18, 2006
58) M. Belbeoch, “Argo Information CentreAIC,” Cape Town, South Africa, May 2005, URL: http://www.aoml.noaa.gov/phod/sardac/meetings/2005May12/AIC.pdf
59) https://argo.ucsd.edu/wp-content/uploads/sites/361/2020/07/Argo_logo_tallspacer.png
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).