Antarctic Broadband
Technology Development
Antarctic Broadband Nanosatellite Demonstration Mission
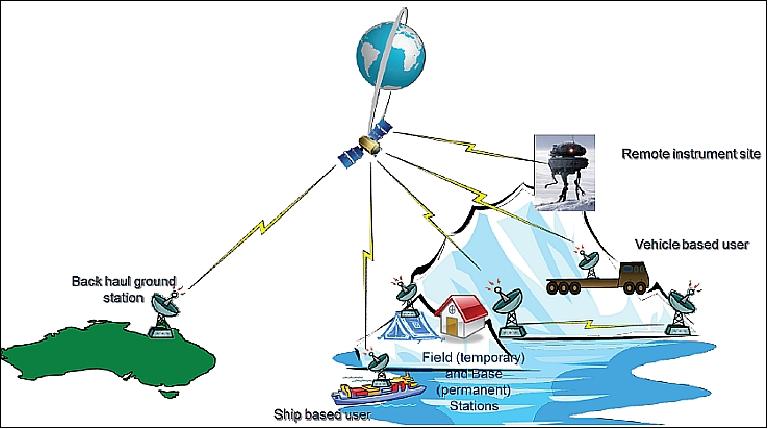
The Antarctic Broadband program of the Government of Australia aims to establish a quality broadband communications service for the international community in Antarctica. The program was initially funded from the Australian Space Research Program and has been awarded an Engineering Excellence Award from Engineers Australia. Using a small satellite platform customized for the needs of users in the Antarctic region, the program will provide the hardest-to-reach continent with dedicated links to the rest of the world. Provision of high speed telecommunication to Antarctica presents a number of unique challenges, exacerbated by the relatively low number and wide geographic distribution of users. 1) 2)
In 2012, the Antarctic Broadband program is developing a wide range of services which will improve communication and research support in Antarctica as well as a number of enduring space capabilities in Australia. 3) 4) 5)
The initial project phase, supported under the Australian Government’s ASRP (Australian Space Research Program), has defined a satellite communications service optimized to meet the current and future data transfer needs of the entire Antarctic community, and has also tested a number of important technologies for its implementation.
The Antarctic Broadband program broadly consists of two primary phases:
1) In the short-term, these activities are intended to culminate in the flight of a nanosatellite demonstration mission, based on the successful GNB (Generic Nanosatellite Bus) architecture of UTIAS/SFL (University of Toronto, Institute for Aerospace studies/Space Flight Laboratory), Toronto, Canada.
2) The long-term goal calls for the development of an operational satellite constellation providing broadband services at or near 100% availability across the Antarctic circle.
The Antarctic Broadband program is being undertaken by a consortium of international partners, offering a broad spectrum of capabilities. These partners include:
- Aerospace Concepts Pty Ltd, Australia (overall project management and systems engineering)
- UTIAS/SFL (Space Flight Laboratory ), Toronto, Canada (provider of a demonstration nanosatellite)
- EM Solutions Pty Ltd, Queensland, Australia (payload provider)
- ANU (Australian National University), Canberra, Australia (ground station and integration host) 6)
- ES&S (Environmental Systems and Services Pty Ltd), Hawthorn, Victoria, Australia (Ka-band ground terminal development)
- Josephmark Pty Ltd, Brisbane, Australia (public relations, branding)
- The Tauri Group LLC (North America customer relations).
Motivation
The need for high-availability, high-bandwidth communications services in the Antarctic is becoming increasingly evident. Figure 1 illustrates the exponential trend in South Pole data requirements projected through 2012 — clearly there is growing need for data services in the Antarctic. At present, the majority of data services to Antarctic stations are provided either by intermittent, low-quality links using "stray" GEO communications satellites — which are already operating beyond their design lifetime — or by using the Iridium constellation, which is expensive and relatively low-speed. Alternative solutions are also problematic: fiber optics would be prohibitively expensive and prone to damage caused by moving ice and snow, and Antarctic bases are far too remote for line-of-sight terrestrial microwave links. A dedicated satellite solution is ostensibly the best way to solve the data transfer bottleneck of concern to current and future researchers in the Antarctic. 7) 8)
Key objectives of the demonstration mission include:
• Measurement of Ka-band uplink and downlink excess path losses due to meteorological effects
• Demonstration of transponder performance (i.e. Eb/No, BER)
• Performance demonstration using adaptive modems
• Measurement of radiated interference at Ka-band received on the satellite uplink
• Quasi-operational demonstration.
Perhaps the most compelling objective from the standpoint of the end user is quasi-operational demonstration. If successful, the demonstration nanosatellite may be used to transfer user data between two facilities in the Antarctic circle, or even beyond the continental coverage zone to gateway stations located on ships or other continents (Ref. 7).
Spacecraft
The Antarctic Broadband demonstrator satellite has been designed by the UTIAS Space Flight Laboratory, based on its GNB (Generic Nanosatellite Bus) platform, most recently used in the highly successful AISSat-1 mission (launched July 2010), and the basis for the BRITE Constellation (launch Q4 2012), the CanX-4&5 formation flying missions (launch 2014), and AISSat-2 (launch 2013).
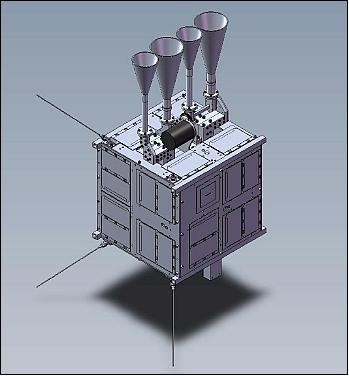
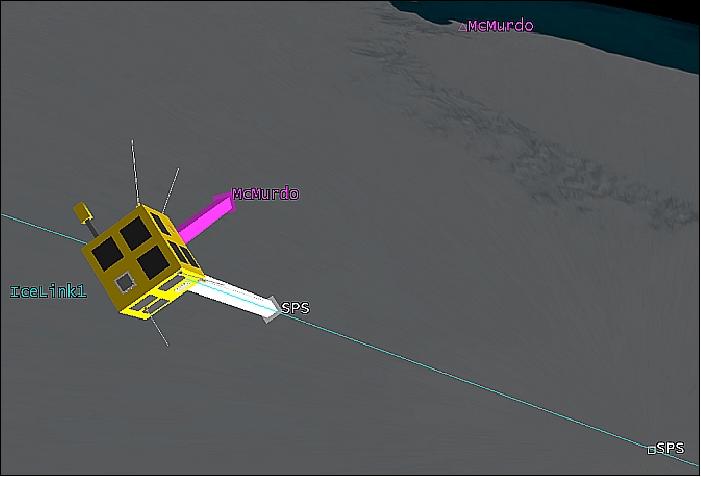
The demonstrator Ka-band transponder payload has been developed in Australia by EM Solutions. The spacecraft requires four Ka-band horn antennas, one pair of which will be actuated and is is depicted in Figure 2.
As of mid-2012, the Antarctic Broadband demonstrator nanosatellite has completed Phase C (detailed design) and is ready for manufacture. The demonstrator mission could be launched as early as late 2013 (Ref. 3).
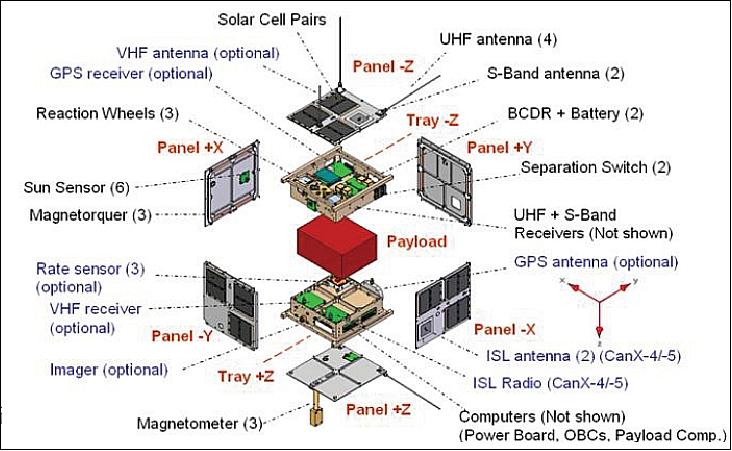
The GNB platform of SFL is a 20 cm cubical nanosatellite design with a mass of < 10 kg; the internal payload volume is approximately 17 cm x 13 cm x 8 cm. This central payload volume sits between two trays which house the majority of spacecraft electronics and actuators. These trays connect together via payload mounting brackets and external panels, which also serve as mounting surfaces for solar cells and antennas.
All GNB spacecraft contain two identical OBCs (On-Board Computers). The HKC (Housekeeping Computer) enables communications with the ground, as well as telemetry collection and mass data storage, while an ADCC (Attitude Determination and Control Computer) controls a suite of sensors and actuators. Both computers are identical in design, and only one computer is theoretically required for both housekeeping and ADCS (Attitude Determination and Control Subsystem) functions. A UHF receiver provides a 4 kbit/s command uplink, while an S-band transmitter provides the primary downlink at 32 kbit/s minimum.
ADCS: Each GNB spacecraft is three-axis stabilized, using three reaction wheels for precision attitude control and three magnetorquers for coarse control and momentum dumping. Degree-level attitude determination is enabled by a suite of six sun sensors, magnetometer, and rate sensors. An optional star tracker improves attitude determination to the sub-arcmin level. Timing and position estimates can also be refined through the inclusion of a GPS receiver.
EPS (Electrical Power Subsystem): The nanosatellite features surface mounted solar arrays on all panels, each of which nominally generates ~ 5.7 W under worst-case-hot end-of-life (WCH/EOL) conditions. The EPS is capable of regulating the system operating voltage such that maximum power can be extracted from solar panels as required. A distributed power system allows various loads to be switched on and off and also provides voltage and current telemetry for all power switches. Power is generated by multiple body mounted strings of triple-junction solar cells, and energy is stored in two independent 5.3 Ah lithium-ion batteries, each of which is integrated to the bus via integral BCDRs (Battery Charge/Discharge Regulators). The EPS uses a high-efficiency DET (Direct-Energy Transfer) topology with PPT (Peak-Power Tracking) capability.
The GNB implementation is highly reconfigurable. Any of the equipment described above can be omitted (or in some cases, additional units included) as required. The operational orbit for GNB missions is nominally 500 to 1000 km sun-synchronous, and as part of the GNB philosophy, the thermo-optical properties of all GNB spacecraft can be tailored to achieve passive thermal control for any LTAN (Local Time of Ascending Node).
Spacecraft mass, volume | 6.82 kg, 20 cm x 20 cm x 20 cm |
Attitude solution, attitude control, attitude pointing mode | ±1.0º, ±2.0º, target tracking |
Power generation, battery capacity | 5.7-14 W, 5.3 Ah (x2) |
Bus voltage | 3.5-5.5 Vdc |
Telemetry downlink rate | Up to 1 Mbit/s |
Data storage | Up to 1 GB |
Launch interface | XPOD Ejection System |
Payload volume, mass | 8 cm x13 cm x 17 cm, 1.7 kg |
Payload energy/orbit, payload voltage | 3.33 Wh, bus voltage |
Data production | 5 MB/day maximum |
Survival temperature, operational temperature | -40º to +80ºC, -20º to +60ºC |
Command uplink margin, telemetry downlink margin | 7.19 dB, 6.05 dB |
Launch
A launch of the Antarctic Broadband demonstrator nanosatellite as a secondary payload is expected for 2013/14into LEO.
For deployment, the GNB spacecraft are designed to use the UTIAS/SFL XPOD separation system. Different XPOD designs can accommodate one or more spacecraft of size up to 20 cm x 20 cm x 44 cm and 15 kg. The XPOD releases its spacecraft when signaled to do so by the launch vehicle at the appropriate time in the launch sequence.
Orbit study
In the operational mission study, four synchronous "inverted Molniya" elliptical orbits were considered, with inclinations equal to 63.4º to keep the perturbations to the argument of perigee near zero. Highly eccentric orbits permit long dwell times over the Antarctic for each satellite, and 100% coverage can be achieved with only two satellites. Thus, a dual HEEO (Highly Elliptical Earth Orbits) satellite approach is the current baseline for the operational mission (Ref. 7).
String of pearls implementation: Alternatively, a mini-constellation of eight LEO satellites, referred to as a "string of pearls" configuration, has also been considered. This configuration allows data to be relayed from the Earth's surface up to whichever satellite in the string is visible, which in turn forwards the message via satellite-to-satellite relay until the receiving ground station is in view of the constellation, at which point the data can be downlinked. The string of pearls configuration requires a larger number of more complex spacecraft (due to the need for intersatellite communications), but has a more benign radiation environment and less exotic orbits. As well, the string of pearls approach has a linear cost growth model — the constellation can be built up incrementally, and can be quasi-operational at lower cost than the elliptical orbit implementation, the latter of which will require a dedicated launch. However, with the string of pearls configuration, there are additional service area coverage and satellite antenna design issues that must be resolved, especially for reduced-size (i.e. incomplete) constellations.
Demonstration mission
In order to verify the performance of a Ka-band system in a non-GEO orbit, and to verify link characteristics and modem performance in polar conditions, a LEO demonstration mission design was also undertaken for Antarctic Broadband. This demonstrator nanosatellite was taken to the CDR (Critical Design Review) stage in 2011, and deliverables included both a protoflight “flatsat”, ready for flight testing, as well as a fit/form/function Ka-band transponder system designed for the nanosatellite scale. Testing of the Ka-band payload occurred at ANU (Australian National University ) in July 2011, with the payload tested both at the unit level and integrated with the nanosatellite flatsat.
Sensor Complement
Ka-band Transponder
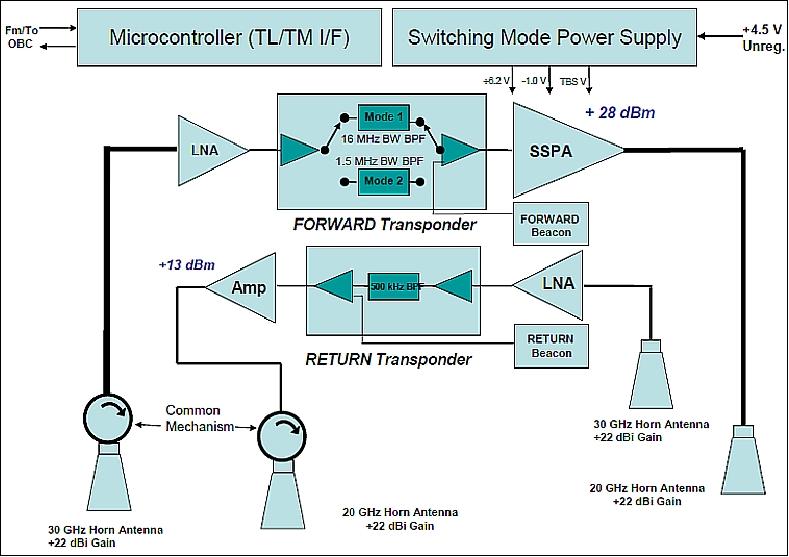
The transponder is designed and developed by EM Solutions Pty Ltd. The general characteristics of the linear transponder, developed by the Antarctic Broadband program, are summarized in Table 2.
Instrument mass | 1.7 kg |
Forward link | > 100 dB gain |
Return link | > 100 dB gain |
Receive frequency, transmit frequency | 29.975 GHz, 19.725 GHz |
Forward frequency drift | < 10 kHz from startup |
Return frequency drift | < 11 kHz from startup |
DC input power | < 10 W |
Forward intermodulation level | -20 dBc |
In order to verify the performance of a Ka-band system in a non-GEO orbit, to verify the link behavior at Ka-band under Antarctic conditions and to verify the advanced modem performance, a LEO demonstration mission design was carried out. This was done to the CDR level of detail. In support of that effort, a fit/form/function transponder system, designed to the demonstration mission requirements, was developed and functionally tested. Additionally, a protoflight nanosatellite platform was fabricated by UTIAS/Space Flight Laboratory (the GNB platform was used) and delivered to Australia, where it was integrated with the prototype transponder, and the spacecraft was then tested as a flatsat. The integration milestone was achieved on schedule and within budget. Hence, this was not simply a paperwork exercise. The linear transponder produced under the Antarctic Study contract had the following general characteristics as shown in Table 2. 9) 10)
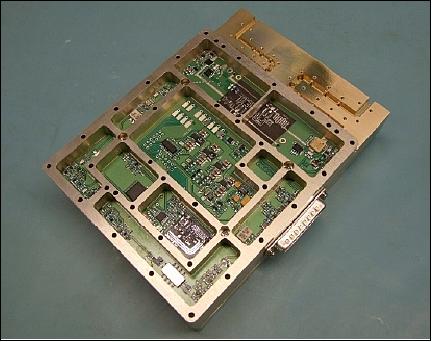
Figure 4 shows the exposed central tray of the nanosatellite Ka-band transponder. The transponder is actually a dual transponder, with the forward and return link transponders contained within one envelope. Because full duplex communications are essential for Internet applications, the transponder is configured to operate with wideband performance in the forward direction while providing a more narrowband link in the return direction. In the case of the demonstrator mission, the return link serves primarily to provide acknowledgement of receipt of packets sent in the forward direction.
With reference to Figure 2, the payload has a total of four high-gain horn antennas, with a pair for each link (forward and return). Of these antennas, two are fixed directly to the payload and, perforce, the satellite, while the other pair are actuated together using a single DOF (Degree of Freedom) positioner.
This arrangement allows the demonstrator spacecraft to be in mutual communication with two visible ground stations desiring to communicate with each other. To achieve the link between the two ground terminals, the spacecraft attitude control system points its two fixed antennas at one ground station; rolls about the fixed antenna pair to place the second ground station in the plane of the second antenna pair positioner; and then actuates the second pair to point at the second ground station. The attitude of the spacecraft and rotation of the positioner are continuously updated to track the two ground stations. For two stations located at typical bases in Antarctica, from a 1000 km circular SSO, the pointing angle rates of change can be as high as 5º/s for short periods, but are rarely above 2º/s (Ref. 9).
The Antarctic Broadband transponder prototype and flatsat were designed and tested to support at least 30 minute ON times, as verified by bench tests.
Alternative applications
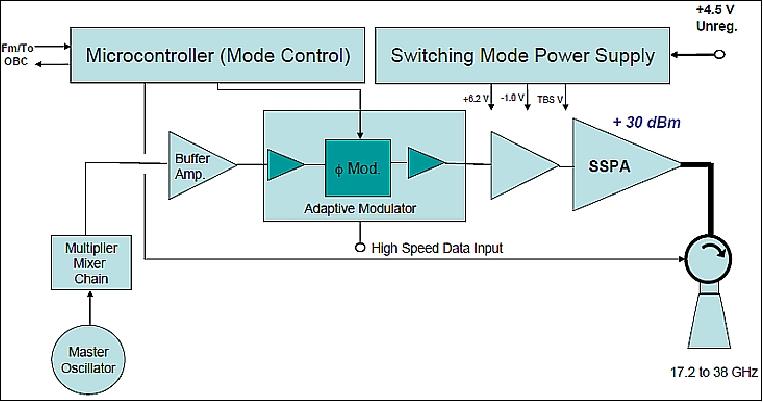
The dual station tracking and communications solution described above can also be used to enable other types of mission at that nanosatellite level. The GNB-derived Antarctic Broadband nanosatellite is able to continuously track and point at two positions on the Earth continuously, which is a general solution to a far more general problem. In particular, if the fixed pair of Ka-band horns were replaced with an optical instrument or generally exchanged for a remote sensing instrument, the remaining two antennas could be used as a high-speed downlink and uplink channel to/from the instrument. In this sort of application, the return antenna pair would be eliminated, and the forward antenna pair would be used as a telemetry transmitter and command receiver. The high-speed, high efficiency telemetry transmitter thus derived is shown in Figure 7. The achieved high-efficiency Ka-band payload, combined with the SFL GNB’s high-performance attitude control system, together enable a new class of high-performance EO missions at the nanosatellite scale.
As of August 2012, the consortium has completed the following major milestones:
• Phase B preliminary design of an operational mission
• Phase C detailed design of a demonstrator mission
• Delivery of a flight-worthy core flatsat, consisting of on-board computers and power subsystem
• Development and testing of a prototype Ka-band transponder
• Installation and commissioning of a telemetry and command ground station at Mt. Stromlo, ANU.
References
1) Daniel Faber, Michael Brett, Jan King, Shaun Wilson, Paul Guthrie, “The Business Case for Delivering Broadband to the Antarctic using Microsatellites,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.E6.3.3, URL: http://antarcticbroadband.com/wp-content/uploads/file/Faber%20et%20al%202011%20-
%20Business%20Case%20for%20Delivering%20Broadband%20to%20the%20
Antarctic%20Using%20Micro-Satellites%20-%20IAC%202011%20-%20paper.pdf
2) “Antarctic Broadband Satellite Project Team Celebrates Grant,” Space Daily, March 16, 2010, URL: http://www.spacedaily.com/reports/Antarctic_Broadband_Satellite_Project_Team_Celebrate999.html
3) Grant Bonin, Robert E. Zee, Michael Brett, Jan King, Daniel Faber, “Antarctic Broadband: Fast Internet for the Bottom of the Earth,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B2.3.4
4) “Antarctic Broadband: Definition and Capability Development,” Australian Space Research Program, URL: http://www.space.gov.au/.../ASRP04%20-%20Antarctic%20Broadand%20-%20Aerospace%20-%20Factsheet%20-%20Final.pdf
5) “Antarctic Broadband,” 2011, URL: http://antarcticbroadband.com/partners/
6) “Antarctic broadband program - Improving communications in the last great wilderness,” ANU, May 17, 2012, URL: http://rsaa.anu.edu.au/research/highlights/antarctic-broadband-program
7) Grant Bonin, Robert E. Zee, Jan King, Michael Brett, “The Antarctic Broadband Demonstration Nanosatellite: Fast Internet for the Bottom of the Earth”, Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-IV-8,
8) J. A. King, P. Guthrie, M. Brett, S. A. Wilson, “Response to NSF RFI on Satellite Communications Needs,” Antarctic Broadband, July 2012, URL: ftp://ftp.bas.ac.uk/COMNAP/Antarctic%20Broadband%20-
%20NSF%20RFI%20Response%20to%20Satellite%20
Communications%20Mission%20Needs%20-%20updated%20Jul%202012.pdf
9) Jan A. King, Grant Bonin, John Ness, Daniel Faber, Michael Brett, “Nanosat Ka-band Communications – A Paradigm Shift in Small Satellite Data Throughput,” Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-VI-9, 'A Funny Thing Happened on the way to the South Pole,' URL: http://www.emsolutions.com.au/.../SMALL%20SATELLITE%20PAPER%20JUNE2012.pdf
10) D.R. Faber, J. Ness, G. Niethe, M. Brett, J. King, “Ka-band Transponder for CubeSats and Nanosats,” 2012, URL: http://antarcticbroadband.com/.../Faber-et-al-2012-Nanosat-
Ka-Band-Transponder-European-Cubesat-Symposium-2012-abstract.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).