AeroCube-4 CubeSats
Non-EO
Mission complete
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Mission complete |
| Launch date | 13 Sep 2012 |
| End of life date | 2019 |
AeroCube-4
AeroCube-4 is a CubeSat technology demonstration mission within the PicoSat Program of The Aerospace Corporation, El Segundo, CA, USA. The AeroCube-4 CubeSat (a series of 3 spacecraft, is also designated as AC4-A, AC4-B and AC4-C). Two of the Aerospace-4 CubeSats were built for a national security agency. The third CubeSat was built for the for SMC/XR (Space and Missile Systems Center/Development Planning Directorate). The AeroCube-4 CubeSats represent a constellation of of 3 CubeSats operated by The Aerospace Corporation. 1)
Spacecraft
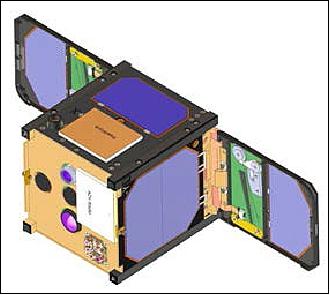
The SMC/XR AeroCube-4 is a CubeSat with a 1U form factor and a mass of ~ 1.2 kg that contains various "first of a kind" mission technologies, including solar panel wings that close and open to tune the ballistic coefficient enabling efficient formation flying, three-axis attitude control to 1º absolute accuracy. The AC4-C spacecraft maintains a launch vehicle environment data logger, which measures launch vibration in-situ, and contains a deorbit drag device that will be deployed at the end of its primary mission (size of 0.3 m2).
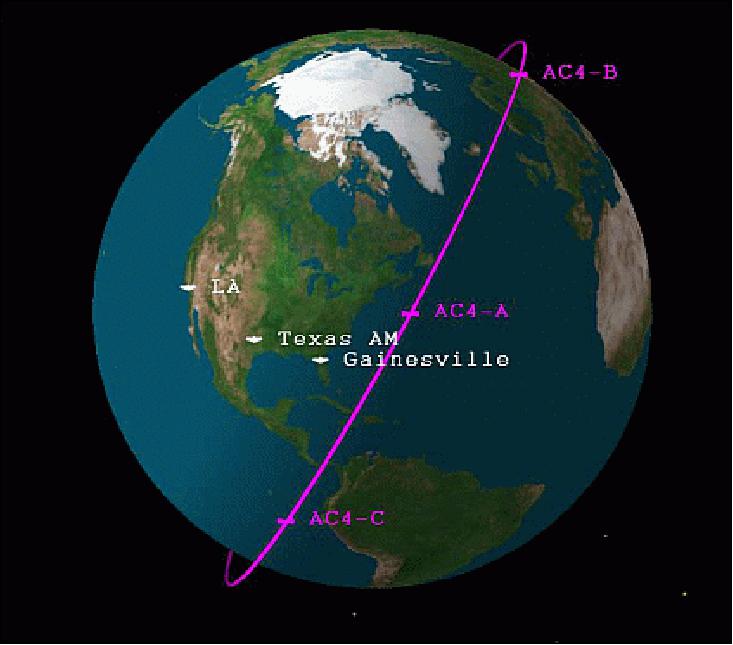
Also for this mission, in order to efficiently manage three CubeSats in orbit at one time, a new three-node automated ground system network has been developed with antennas in California (The Aerospace Corporation, El Segundo), Texas (Texas A&M, College Station) and Florida (University of Florida, Gainesville).
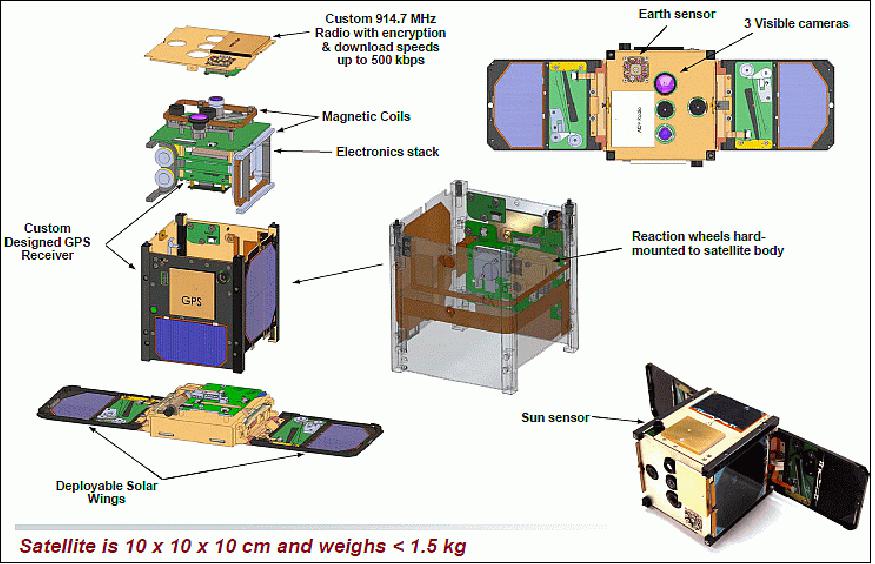
The AeroCube-4 CubeSat features the following functionality and devices (new items in bold):
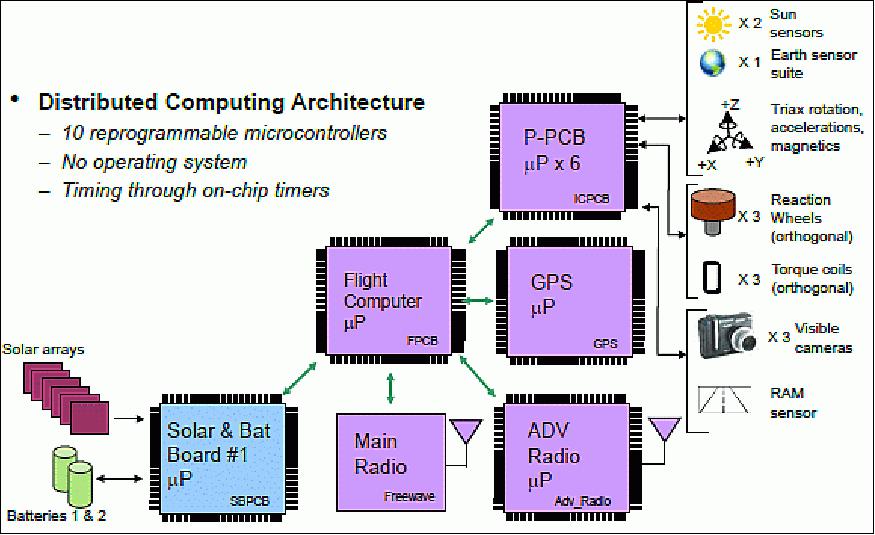
• Radio1 (915 MHz, 1 W), Radio2 (915 MHz, 1 W), a spread-spectrum radio locked on a single frequency. The radios are using an experimental license with a data rate of 38.4 kbit/s. 2) 3)
• GPS receiver, designed and built at The Aerospace Corporation, is based on a terrestrial SDR (Software Defined Radio) receiver that was ported for space applications.
• Deployable of two solar panels (each 9 cm x 10 cm)
• Non-inflatable deorbit device
• 3 cameras (1600 x 1200 CCDs)
• 3 reaction wheel assembly (Figure 2)
• 3 torque coils
• Redundant architecture
• On-orbit software reprogrammability
• Lithium-Ion batteries (2 x 18650)
• Magnet field sensors (HMC5883L magnetometer from Honeywell)
• Earth and sun sensors
• High fidelity 3-axis rate gyro
• The closed-loop attitude control is based on IMU (Inertial Measurement Unit). The system is capable of < 1º of pointing precision.
Launch
The AeroCube-4 1U CubeSat was launched on Sept. 13, 2012 as a secondary payload on an Atlas-5-411 vehicle of ULA (United Launch Alliance) from VAFB, CA. The primary payload on this flight, referred to as NROL-36, were two NRO/MSD (Mission Support Directorate) classified spacecraft [NRO-36, namely NOSS-36A and NOSS-36B (Navy Ocean Surveillance Satellite)]. 4) 5)
Prior to launch, officials noted that the secondary payloads would be deployed after the Centaur completes the primary mission indicating that the Upper Stage would perform at least one burn after main payload separation. It was expected that the Atlas-5 would fly a nominal flight profile consisting of its Common Core Booster Ascent Phase followed by a Centaur Upper Stage Burn to deliver the stack to a Parking Orbit. After a coast phase, the Centaur would make a second burn to circularize the orbit. Afterwards, the NROL-36 payloads would be released and the Centaur was expected to make a Collision and Contamination Avoidance Maneuver. Additional maneuvers and the third&fourth RL-10 engine burn would follow to adjust the orbit for the deployment of the secondary payloads into a 470 km x 770 km orbit with an inclination of 66º more than three hours after launch (Ref. 4).
Orbit of All Secondary Payloads
Elliptical orbit of ~780 km x 480 km, inclination = ~65º.
P-POD | Launch Sponsor | CubeSat Name | Organization | Size | Mass (kg) | Mission |
1 & 8 | NRO/MSD | SMDC-ONE 2.1 | US Army SMDC/ | 3U, Qty 2 | 4.1 | Communications |
2 | NRO/MSD | AeroCube-4B, 4C | Aerospace Corp., El Segundo, CA | 1U, Qty 2 | 1.2 | Technology Demo |
2 | NRO/MSD | AeroCube-4A | Aerospace Corp | 1U | 1.2 | Technology Demo |
3 | NRO/MSD | Aeneas | USC, Marina Del Ray, CA | 3U | 3.7 | Cargo Tracking |
7 | NRO/MSD | RE (STARE-A) | LLNL, Livermore, CA | 3U | 4.0 | Space Debris Mitigation |
4 | NASA/LSP | CSSWE | Univ of Colo/NSF | 3U | 3.5 | Space Weather |
5 | NASA/LSP (Launch Services Program) | CXBN | Morehead State University and Kentucky Space | 2U | 2.6 | Space Weather |
5 | NASA/LSP | CP5 | CalPoly, San Luis Obispo, CA | 1U | 1.1 | Debris Mitigation |
6 | NASA/LSP | CINEMA-1 | NSF/UCB Berkeley | 3U | 2.8 | Space Environment |
This is the first Atlas V launch with modified helium tanks in the Centaur upper stage. The change has created room in the aft skirt to accommodate 8 P-POD dispensers for CubeSats. This launch carries 11 CubeSats, to be released into a 470 km x 770 km orbit about 3 hours after launch and following maneuvers by the Centaur upper stage.
The launch of all CubeSats is being conducted in a new container structure, referred to as NPSCuL (Naval Postgraduate School CubeSat Launcher). This new dispenser platform was designed and developed by students of NPS (Naval Postgraduate School) in Monterey, CA, to integrate/package P-PODs as secondary payloads.
NRO refers to all 11 secondary (or auxiliary) CubeSat payloads on NROL-36 as the OUTSat (Operationally Unique Technologies Satellite) mission using for the first time the NPSCuL platform as a container structure for the 8 P-PODs (Ref. 7).

Orbit Estimation
The project received TLE (Two-Line Element) sets by JSpOC (Joint Space Operations Center) of the US Air-Force, located at VAFB, CA - to determine the AeroCube-4 orbits and plan communication passes. In addition to the TLEs, GPS fixes permitted the AeroCube team to cooperate with the JSpOC in locating and tracking the AeroCubes, particularly during the early-orbit phase of the mission when differentiation between the eleven OUTSat CubeSats was problematic and TLEs could only be released at irregular intervals.
The mission of the AeroCube-4 series required sophisticated attitude knowledge and control for precise pointing of the AeroCubes and ground-based facilities, a challenge that demanded high-precision knowledge of the satellites' state in space. High-precision orbit determination (OD) was made possible by a GPS receiver installed on each satellite that collected fixes on a regular basis and delivered the measurements of the satellites' position and velocity. 8)
GPS fixes: The least-squares navigation algorithm originally written for terrestrial application remains unchanged, which causes slight degradation in accuracy. The satellite-selection and signal-reacquisition strategy were designed specifically for a tumbling CubeSat's sporadic reception (when not performing specific mission-related pointing, the satellites were left to tumble). During development, a Spirent GPS simulator was used for functional verification.
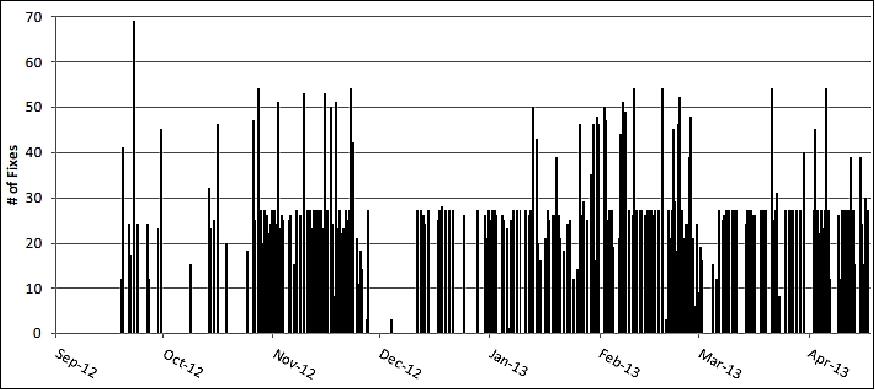
When a run of GPS fixes is requested by the operator, the GPS receiver queries for three fixes in short succession (within a few seconds of each other), and repeats that nine times in approximately ten-minute increments, yielding a maximum 27 fixes, with these nine sets of three evenly spaced over the orbit. Unfavorable spacecraft attitude for the GPS antenna may yield fewer than 27 for a particular run.
Typically the GPS receiver is commanded to acquire fixes once a day, depending on power budget and operational priority. Acquiring fixes every orbit would be impractical for data-storage and power reasons. Since launch, the AeroCube-4 satellites have returned thousands of GPS fixes, each averaging ~16/day. Figure 6 shows a time history of the GPS fixes downlinked from AC4-B and -C through April 2013. (AC4-A failed early in its mission and few GPS fixes were acquired.)
GPS fixes are processed on board the AeroCube and received in binary form through the radio downlink. After conversion to an ASCII format, the GPS fix contains several elements: the time of the fix (precise to the millisecond), the latitude, longitude, and altitude of the satellite, the velocity of the satellite in Earth-fixed Cartesian coordinates, and estimates of the fix's PDOP (Position Dilution of Precision), TDOP (Time Dilution of Precision), and TTFF (Time To First Fix). Conversion from GPS time to UTC time is done on board, including a post-launch software update to account for the June 2012 leap second. Only fixes with PDOP and TDOP less than 6 were retained for purposes of orbit determination (Ref. 8).
Status of Mission
• May 27, 2015: The AeroCube-4 series spacecraft (AC-4A & AC-4B) are operational in May 2015 (33 months on orbit, 1 year design life). 9) Aerospace's efforts to minimize the CubeSat debris hazard. AeroCube-4 Series:
- AeroCube-4A contains a deployable drag chute to increase drag 10 X.
- Not deployed yet because spacecraft is functional and useful.
- Deployable/retractable wings were used to modify ballistic coefficient.
- Satellite rephasing, using variable spacecraft drag, was demonstrated.
• The AeroCube-4 series spacecraft (AC-B and AC-C) are operational in April 2014 (18 months on orbit) and still going strong. A 1U CubeSat can provide responsive, targeted remote sensing data such as in forest fire verification and in celestial events.
Overview of AeroCube-4 Capabilities and Statistics in the Spring of 2014 (Ref. 3)
• On-orbit reprogrammable software has proven to be invaluable- 150 software updates in 18 months
- Several software updates replaced greater than 75% of prior binary
- Allowed for alternate attitude control methodology to overcome on-orbit anomalies
• Ground Planning Software Supports Complex Mission Operations
- 570 data collection experiments involving attitude control planned & executed
- Over 11,000 high resolution images collected & downloaded (>1 GB data)
- Planning software includes ephemeris propagation and attitude trajectory profiling
- Plan outputs can be run through Simulink Simulation prior to upload for verification & to estimate predicted performance
• Lights-out Ground Station Network
- Data upload & download pre-planned and scheduled for multiple remote ground antennas
• Robust Power System & Reset Logic
- Survived 7 latch-up events induced by solar radiation
- Combination of battery under-voltage protection & daily resets of all electronics

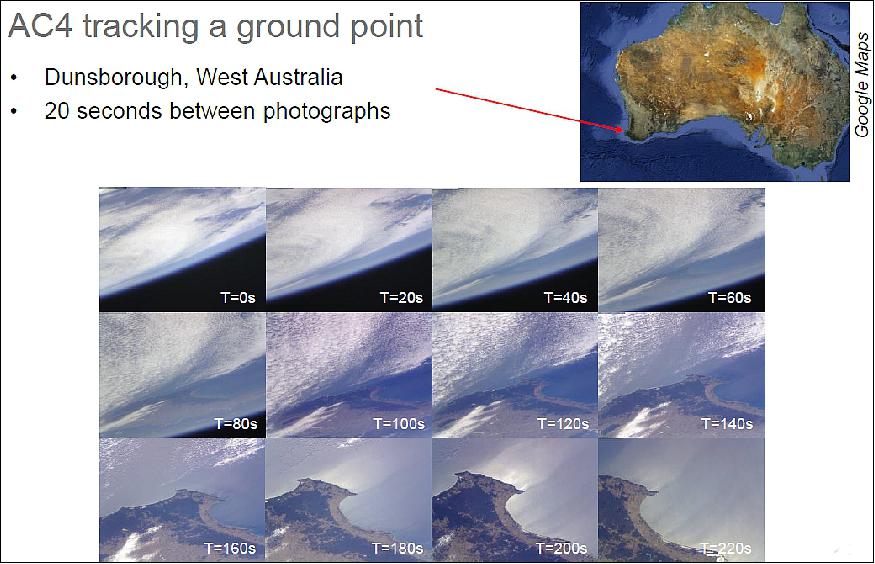
AeroCube-4 can slew and maintain pointing at a specific ground target.

• November 2013: One of Aerospace's CubeSats captured a photo of the moon's shadow on Earth's surface during the solar eclipse that occurred on Nov. 3, 2013. The solar eclipse began at 11:00 UTC and lasted for about two hours, with the shadow of the moon tracing a thin path that began in the Atlantic near Bermuda, crossed the ocean in a southeasterly direction, and ended over central Africa. 10)
- The image (Figure 11) shows the umbral and penumbral shadows of the moon. The dark center of the circle—the umbra—is 50-100 km wide, and the penumbra extends another 100+ km beyond that. The image was taken while the shadow was passing over the Atlantic ocean south of Liberia and the Ivory Coast.

• Two AeroCube-4 series spacecraft (AC-B and AC-C) are operational in the summer of 2013 (Ref. 8).
Overall, the AeroCube-4 series of three satellites have provided a wealth of experience in the operation of a CubeSat constellation that will be invaluable for future missions that require sophisticated formation flying with multiple small spacecraft.
Formation Control
During the early-orbit and checkout phases of the AC4-B mission in November 2012, the CubeSat's wings were opened and closed to verify their functionality. These tests provided the opportunity to detect a change in the satellite's ballistic coefficient, a key parameter that must be controllable for any mission that requires formation control (Ref. 8).
Changes in the ballistic coefficient could be detected through the variability of orbital elements (primarily through the semi major axis), but the low drag at the AeroCube's 480 km x 780 km altitude orbit would require weeks to unambiguously detect an effect. Instead, it was desired to detect a wing change as quickly as possible—preferably in a few days—via high-precision GPS measurements.
On 14 November 2012 at 02:10 UTC, the wings of AC4-B were closed. Over the next three days, AC4-B collected 77 GPS fixes in 4 batches (~1 set of 20 fixes every day). On 17 November at 05:00 UTC, the wings were opened, after which another 103 fixes were collected in 4 days.
Orbit determination was performed on these fixes, extending from 14–21 November. The OD model included a discontinuous change in ballistic coefficient at the time the wings were opened, and the solution provided two best-fit ballistic coefficients: one while the wings were closed, and one while open.
Table 3 summarizes the results from the orbit determination, showing the ballistic coefficient and 1σ uncertainty across the opened-closed event of the AC4-B's wings. While the wings were closed, the best-fit ballistic coefficient from the OD was found to be 423.3 ± 0.4 cm2/kg; after the wings were opened—increasing the cross-sectional area of the satellite—the best-fit ballistic coefficient increased by approximately 35%, to 574.8 ± 0.4 cm2/kg.
Event | Ballistic coefficient (cm2/kg) |
Wings closed | 423.3 ± 0.4 |
Wings opened | 574.8 ± 0.4 |
During both wing-closed and wing-open phases, the satellite was tumbling, and the ballistic coefficients in Table 3 serve best as an approximation or long-term average of the time-varying drag profile. Because of this time-variability and the uncertainty in the ballistic coefficient between the two configurations, it is not meaningful to convert the ballistic coefficients into cross-sectional areas. However, the 35% increase in the best-fit ballistic coefficient is strong evidence that GPS fixes in conjunction with high-fidelity orbit determination are adequate to detect changes in drag profile over a short time frame and independently from on-board telemetry.
Formation Re-Phasing
In late November 2012, one of the last commands issued to AC4-A was to close its wings. By that time, the formation of all three AeroCubes had spread out in the in-track direction, in the order AC4-B, -A, and -C from trailing to leading. Closing the wings would decrease the rate of altitude loss on AC4-A so that, in time, AC4-B (with wings open and hence a larger drag profile) would fall below –A, and their relative positions would switch (i.e., AC4-B, falling lower and with a higher mean motion, would catch up with and pass AC4-A), marking the AeroCube program's demonstration of deliberate formation control (Ref. 8).
Contact with AC4-A was lost shortly after the wing-close command was issued, and GPS fixes after the event were unavailable to verify the closure. Instead, it became necessary to track the progress of AC4-A through TLEs.
Figure 12 shows a plot of the in-track angular separation between the three AeroCube-4 satellites from the start of mission through April 2013. Plotting the angular separation (as opposed to in-track distance) is necessary because the satellites drifted so far apart that the linear approximation of the standard in-track, cross-track, and radial coordinate system breaks down. In this figure, if the angular separation is positive, then the first satellite in each label is "ahead" of the second in the label.
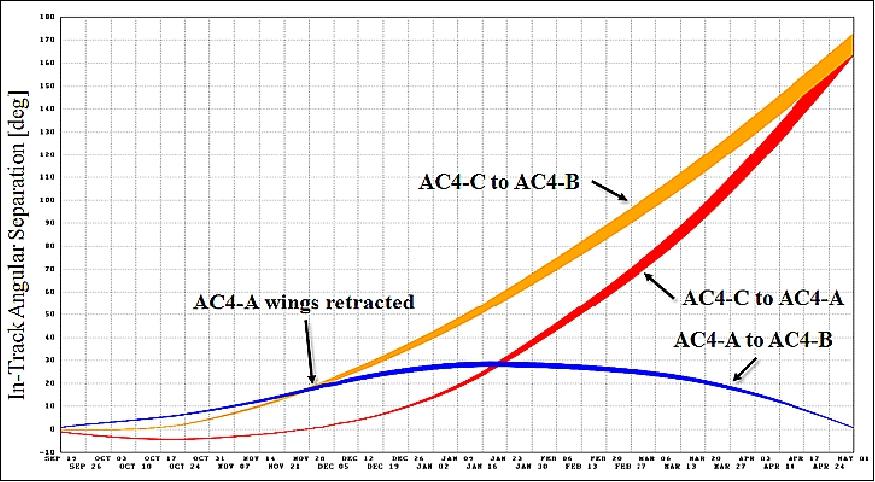
Starting in December 2012 the rate of in-track separation between AC4-A and -B decreases, and the in-track separation reaches a maximum in mid-January 2013. For the rest of 2013, the separation between AC4-A and -B decreases, indicating that AC4-B is "catching up" with AC4-A. This change in relative motion would occur only if the mean motions of the two satellites had diverged. In particular, the reversal of relative motion in December 2012 requires AC4-B to have fallen below AC4-A, which would have occurred only if the differential drag on AC4-B were higher. This behavior indicates that the wings of AC4-A did indeed close and that the goal of deliberate formation control via differential drag was successful.
For further verification of the change in AC4-A's behavior, Figure 13 shows a plot of the orbit periods of the three AeroCube-4 satellites from the start of mission through April 2013, as derived from the TLEs. (These orbital elements are evaluated at the TLE epoch, which corresponds to the satellites' ascending-node crossing.)
Except for brief tests, the wings of AC4-B and -C were open throughout the course of the mission. Having the same drag profile, the time histories of both satellites' orbit period have nearly the same slope: they experience nearly the same orbit-averaged drag force and therefore "fall" at nearly the same rate. (The absolute difference in orbit period is due to the initial deployment dispersions at the start of the mission.)
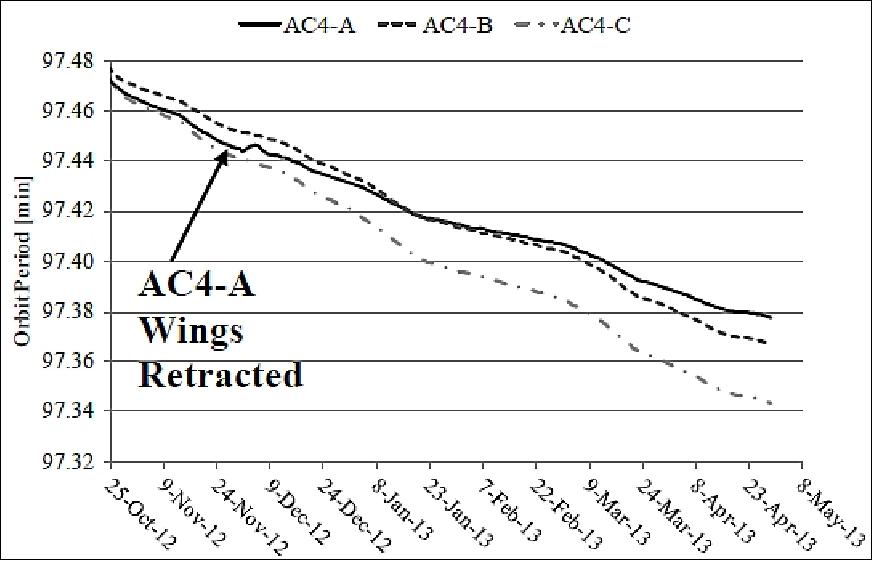
However, AC4-A shows a change in slope compared to the others starting in late November 2012, after its wings were closed, and the slope remains less steep throughout the time frame plotted. In late January 2013, the orbit periods of AC4-A and AC4-B became equal, corresponding to the peak of in-track separation in Figure 12. Thereafter, the orbit period of AC4-A remained higher than both AC4-B and -C, allowing AC4-B to gain ground on AC4-A, which eventually led to AC4-A and -B switching places in the constellation's in-track configuration on 2 May 2013.
References
1) David Hinkley, Brian Hardy, "Picosatellites and Nanosatellites at The Aerospace Corporation," In-Space Non-Destructive Inspection Technology Workshop, Feb. 29 – Mar. 1, 2012, Johnson Space Center, Houston, TX, URL: http://www.nasa.gov/pdf/626635main_inspace-4-3-hinkley.pdf
2) Bryan Klofas, Kyle Leveque, "The Future of CubeSat Communications: Transitioning Away from Amateur Radio Frequencies for High-speed Downlinks," September 2012, URL: http://www.klofas.com/papers/amsat_2012.pdf
3) Joseph Gangestad, Darren Rowen, Brian Hardy, Christopher Coffman, "Forest Fires, Sunglint and a Solar Eclipse: Responsive Remote Sensing with AeroCube-4," Proceedings of the 11th Annual CubeSat Developers' Workshop - The Edge of Exploration," San Luis Opispo, CA, USA, April 23-25, 2014, URL: http://cubesat.calpoly.edu/images/cubesat/presentations/DevelopersWorkshop-2014/Gangestad_AeroCube-4.pdf
4) Patrick Blau, "Atlas V launches on classified Flight to orbit NROL-36 Payload," Spaceflight 101, Sept. 14, 2012, URL: http://www.spaceflight101.com/nrol-36-launch-updates.html
5) "Atlas V Delivers Picosats to Orbit," The AeroSpace Corporation, Sept. 17, 2012, URL: http://www.aerospace.org/2012/09/17/atlas-v-delivers-picosats-to-orbit/
6) Guy Mathewson, "2012 CubeSat Workshop, OSL's Vision & Mission," 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/01-Mathewson-Keynote.pdf
7) Travis Willcox, "Office of Space Launch Atlas V Aft Bulkhead Carrier & Operationally Unique Technologies Satellite," 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/35-Wilcox-NationalReconsisanceOffice.pdf
8) Joseph W. Gangestad, Brian S. Hardy, David A. Hinkley, "Operations, Orbit Determination, and Formation Control of the AeroCube-4 CubeSats," Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-X-4, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2981&context=smallsat
9) Siegfried Janson, "CubeSat Technology and Systems," USGIF (United States Geospatial Intelligence Foundation) Small Satellite Working Group , 27 May 2015, URL: https://web.archive.org/web/20160808122729/http://usgif.org/system/uploads/3807/original/2015_Small_satellite_Working_Group_ADSJedit.pdf
10) "AeroCube-4 Captures Images of the Moon's Shadow," The Aerospace Corp., Nov. 5, 2013, URL: http://www.aerospace.org/news/highlights/aerocube-4-captures-images-of-the-moons-shadow/
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).