Aeolus / formerly ADM (Atmospheric Dynamics Mission)
EO
ESA
Lidars
Atmosphere
Aeolus (or ADM-Aeolus) was an Earth Observation mission, named after the ruler of winds from Greek mythology. The satellite was the first to acquire profiles of Earth’s wind on a global scale.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 22 Aug 2018 |
| End of life date | 30 Apr 2023 |
| Measurement domain | Atmosphere |
| Measurement category | Cloud type, amount and cloud top temperature, Cloud particle properties and profile, Aerosols, Atmospheric Winds |
| Measurement detailed | Cloud top height, Cloud optical depth, Aerosol Extinction / Backscatter (column/profile), Wind profile (vertical) |
| Instruments | ALADIN |
| Instrument type | Lidars |
| CEOS EO Handbook | See Aeolus / formerly ADM (Atmospheric Dynamics Mission) summary |
Related Resources

Summary
Mission Capabilities
ADM-Aeolus carried onboard the Atmospheric Laser Doppler Instrument (ALADIN) developed by Airbus Defence and Space (Airbus DS). ALADIN provides global observations of wind profiles with a vertical resolution that satisfies the accuracy requirements of the World Meteorological Organization (WMO). The provision of accurate wind profiles in the troposphere and lower stratosphere eliminates a major deficiency in the Global Observing System and directly contributes to the study of Earth’s global energy budget.
Its secondary mission objectives related to the provision of data sets for model variation and short term wind climatologies. This enabled understanding of atmospheric dynamics, including the global transport of energy, water, aerosols, chemicals and other airborne materials, to be used to deal with many aspects of climate research, climate and weather prediction. ADM-Aeolus measurements were also assimilated into existing numerical forecasting models, in order to enhance the quality of operational short and medium-range predictions.
Performance Specifications
ALADIN was able to provide data for a wind velocity range of -150 to 150 m/s in three parameters; the Planetary Boundary Layer (PBL), troposphere and lower stratosphere. For the PBL, lying 0 - 2 km above Earth’s surface, ALADIN produced a vertical resolution of 0.25 km. In the troposphere, 2 - 16 km above Earth’s surface, and the stratosphere, 16 - 26 km above Earth’s surface, the instrument provides vertical resolutions of 1 km and 2 km respectively.
ALADIN could produce 100 profiles per hour, covering a horizontal domain of 80°S to 85°N. The excellent horizontal and vertical sampling capabilities of the instrument, combined with a continuous availability of its data products within three hours after sensing, enhanced the quality of current operational short- and medium-range predictions.
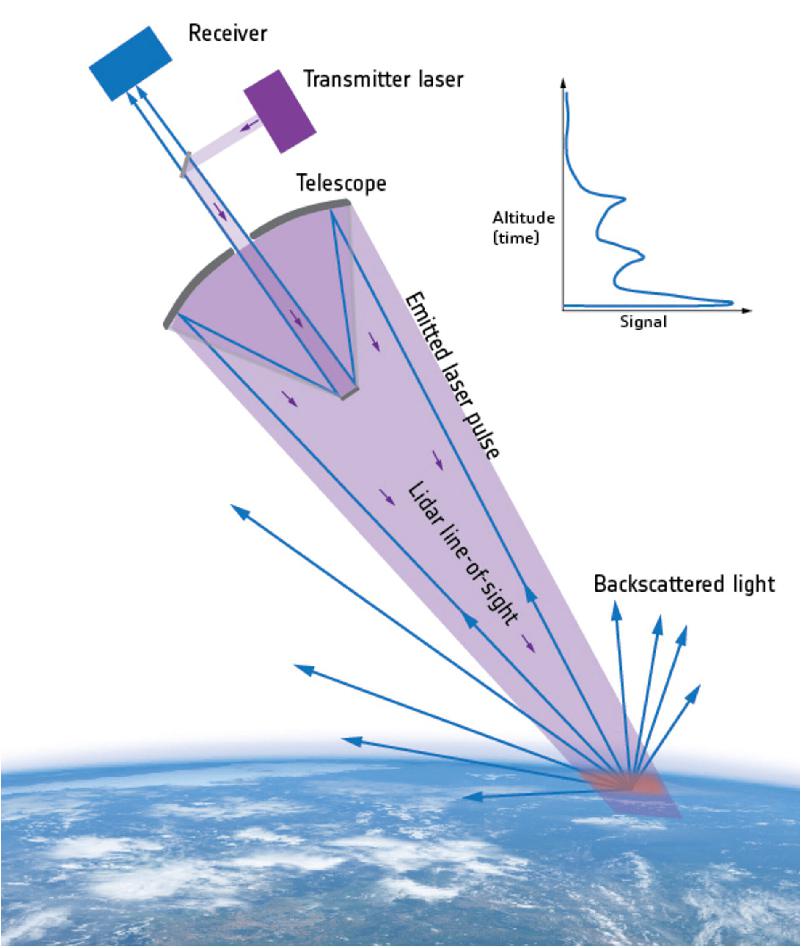
ALADIN employed the Doppler Wind Lidar measurement technique, where the retrieval of wind speed relied on direct measurement along the LOS (Line-of-Sight) by lidar using Doppler shift information from atmospheric molecules and particles advected by wind.
ADM-Aeolus underwent a sun-synchronous orbit at a mean altitude of 320 km with an inclination of 96.97°. The satellite had a period of 92.5 minutes, a repeat cycle of seven days and a local equator crossing time at 1800 hours on an ascending node and at 0600 hours for a dawn-dusk orbit.
Space and Hardware Components
Developed by Airbus DS with a design life of four years, the ADM-Aeolus satellite bus was a new design based on a heritage from other Airbus DS developments including CryoSat and Rosetta.
The spacecraft featured a conventional box-shaped bus consisting of aluminium honeycomb elements, upon which ALADIN was mounted via three isostatic bipods. The 1360 kg spacecraft was three-axis stabilised with an AOCS (Attitude and Orbit Control Subsystem). It used thrusters, reaction wheels and magnetorquers as actuators, and magnetometers, coarse Earth sun sensors, inertial measurement units, rate measurement units, AST (Autonomous Star Tracker) and a GPS receiver as sensors. The orbit was maintained by 5 N hydrazine thrusters.
Aeolus / formerly ADM (Atmospheric Dynamics Mission)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
Aeolus was an ESA (European Space Agency) Earth Explorer Core Mission -a science-oriented mission within its Living Planet Program.
The primary objective was to provide wind profile measurements for an improved analysis of the global three-dimensional wind field. The aim of the mission was to provide global observations of wind profiles with a vertical resolution that could satisfy the accuracy requirements of WMO (World Meteorological Organization).
Such knowledge was crucial to the understanding of the atmospheric dynamics, including the global transport of energy, water, aerosols, chemicals and other airborne materials - to be able to deal with many aspects of climate research and climate and weather prediction. ADM-Aeolus represented a demonstration project for the Global Climate Observing System (GCOS). 1) 2) 3) 4) 5) 6) 7) 8) 9) 10) 11) 12) 13)
The measurement data allowed achievement of the primary goals of Aeolus:
- Provision of accurate wind profiles throughout the troposphere and lower stratosphere eliminating a major deficiency in the Global Observing System
- Direct contribution to the study of the Earth's global energy budget
- Provision of data for the study of the global atmospheric circulation and related features, such as precipitation systems, the El Niño and the Southern Oscillation phenomena and stratospheric/tropospheric exchange.
The secondary mission objectives were related to the provision of data sets for model variation and short-term "windclimatologies" that allowed experts to:
- Validate climate models through the use of high quality wind profiles from a global measurement system
- Improve their understanding of atmospheric dynamics and the global atmospheric transport and cycling of energy, water, aerosols, chemicals and other airborne materials.
- Generate a number of derived products such as cloud top altitudes, aerosol properties and tropospheric height.
The ADM-Aeolus measurements were assimilated in numerical forecasting models, in order to enhance the quality of operational short- and medium-range predictions. Expected improvements were mainly due to the excellent horizontal and vertical sampling capabilities of the instrument, combined with a continuous availability of its data products within 3 hours after sensing.
Note: In the works of the Greek poet Homer, Aeolus is the controller of the winds and ruler of the floating island of Aeolia. In the Odyssey, he gave Odysseus a favorable wind and a bag in which the unfavorable winds were confined. Odysseus' companions opened the bag; the winds escaped and drove them back to the island. Although he appears as a human in Homer, Aeolus later was described as a minor god.
The ADM-Aeolus mission used a single observation instrument, namely ALADIN (Atmospheric Laser Doppler Instrument), employing the DWL (Doppler Wind Lidar) measurement technique. The retrieval of wind speed relied on direct measurement along the LOS (Line-of-Sight) by lidar using Doppler shift information from atmospheric molecules and particles advected by wind. The ALADIN observations served as input for NWP (Numerical Weather Prediction) models. An extensive pre-development evaluation and assessment program of ALADIN laser component technology was started in 2000.
ADM-Aeolus was seen as a pre-operational mission, demonstrating new laser technology and paving the way for future meteorological satellites to measure the Earth's wind.
Spacecraft
Although the ADM-Aeolus satellite was a new design, the platform was based on a heritage from other ESA missions developed by Airbus DS (former EADS Astrium) including CryoSat, and Rosetta. The aim was to build a spacecraft that was relatively simple to operate. This reduced the operating costs throughout its lifetime, and was also important for the future since similar Aeolus-type satellites were later envisaged for operational use.
The S/C structure, which consisted of aluminum honeycomb elements, used a conventional box-shaped spacecraft design (derived from Mars Express), upon which the observation instrument was mounted via three isostatic bipods. The electronic boxes of the bus and the associated satellite equipment were mounted on the side panels.
The spacecraft was three-axis stabilized with AOCS (Attitude and Orbit Control Subsystem), using thrusters, reaction wheels and magnetorquers as actuators, and magnetometers, coarse Earth sun sensors, inertial measurement units, rate measurement units, AST (Autonomous Star Tracker), and a GPS receiver as sensors. The orbit was maintained by 5 N thrusters. 14)
Type | Equipment | Nr. | Main characteristics | Technology | Redundancy | Use |
Sensors | Magnetometer | 2 | Three-axis | Anisotropic magneto-resistor | Cold redundancy | Nominal and safe mode |
Coarse Earth sun sensor | 1 | 4 pi steradian FOV | Thermal | Internal (2 of 3) | Nominal and safe mode | |
GPS receiver | 2 | C/A GPS receiver | RF ASIC and micro processor | Cold redundancy | Nominal mode | |
Autonomous star tracker (AST) | 2 | Large FOV | CCD | Cold redundancy | Nominal mode | |
Rate Measurement Unit | 1 | 3 measurement axes | Solid-state rate sensor | None | Safe mode | |
Inertial reference unit (IRU) | 1 | 3 measurement axes | Fiber Optic Gyro | Internal (3 of 4) | Nominal mode | |
Actuators | Reaction wheels | 4 | 10 Nms/0.1 Nm | Ball bearings | 3 of 4 | Nominal mode |
Magnetic torquers | 3 | 100 Am2 | Windings | Cold redundancy | Nominal and safe mode | |
Thrusters | 4 | 5 N | Hydrazine | Cold redundancy | Orbit control and safe mode |
Magnetometer: The magnetometer (developed at LusoSpace, Portugal) of the ADM-Aeolus spacecraft employed the AMR (Anisotropic Magneto Resistive) technology. The rationale for using the AMR detector for the magnetometer development was due to several advantages over fluxgate technology: 15)
- Detector production repeatability
- Lower cost
- Easier integration in a PCB (Printed Circuit Board)
- Possibility to generate external magnetic field in the chip by mean of built in coils.
The magnetometer was a small (credit card surface dimension) and robust unit that could be used for several LEO missions. Two flight models of the magnetometer were flown on ADM-Aeolus. In addition, a qualification model flied on PROBA-2 as a passenger to provide more flight heritage and in orbit data.
Dynamic field range | ±70 000 nT |
Noise (2σ) | < 40 nT |
Offset (after calibration), offset deviation (-10ºC to 50 ºC) | < 300 nT, < 200 nT |
Linearity | < 0.05 % (full scale: ±70 000 nT) |
Bandwidth | up to 40 Hz (adjustable) |
Design life | 4 years in LEO orbit |
Instrument mass, power, size | 300 g, 1 W, 85 mm x 53 mm x 60 mm (excl. connectors) |

EPS (Electric Power Subsystem): Electric power was provided by two deployable solar wings of 14.5 m2 of total surface area. The triple-junction GaAs cells of the solar arrays provided over 2.4 kW of power (with 1.4 kW of average power required). The solar arrays were articulated toward the sun to optimize their power output. Use of SADM (Solar Array Drive Mechanism) for attitude regulation of the wings. The design included a standard PCDU (Power Control and Distribution Unit) responsible for solar array power conditioning and distribution. A Li-ion battery of 64 Ah capacity was used for eclipse phases and LEOP (Launch and Early Orbit Phase). 16)
On-board autonomy: The spacecraft was designed to include a large amount of on-board autonomy in all mission phases such that ground contact was needed no more than once every 5 days even in the case of anomaly.
On-board data handling was performed by an ERC-32 radiation tolerant processor with 6 MByte system RAM. The subsystems were linked via MIL-STD-1533 data bus to the central processor. A solid-state memory provided a capacity of 8 Gbit on-board data storage.
Aeolus was conceived to allow simple in-flight operation. The satellite had a five-day autonomy in case of any single onboard failure, so that a single operator shift was sufficient to monitor the satellite. In addition, the orbit had a seven day repeat cycle, so that the complete operations timeline was repeated on a weekly cycle, thus minimizing the effort for mission planning.
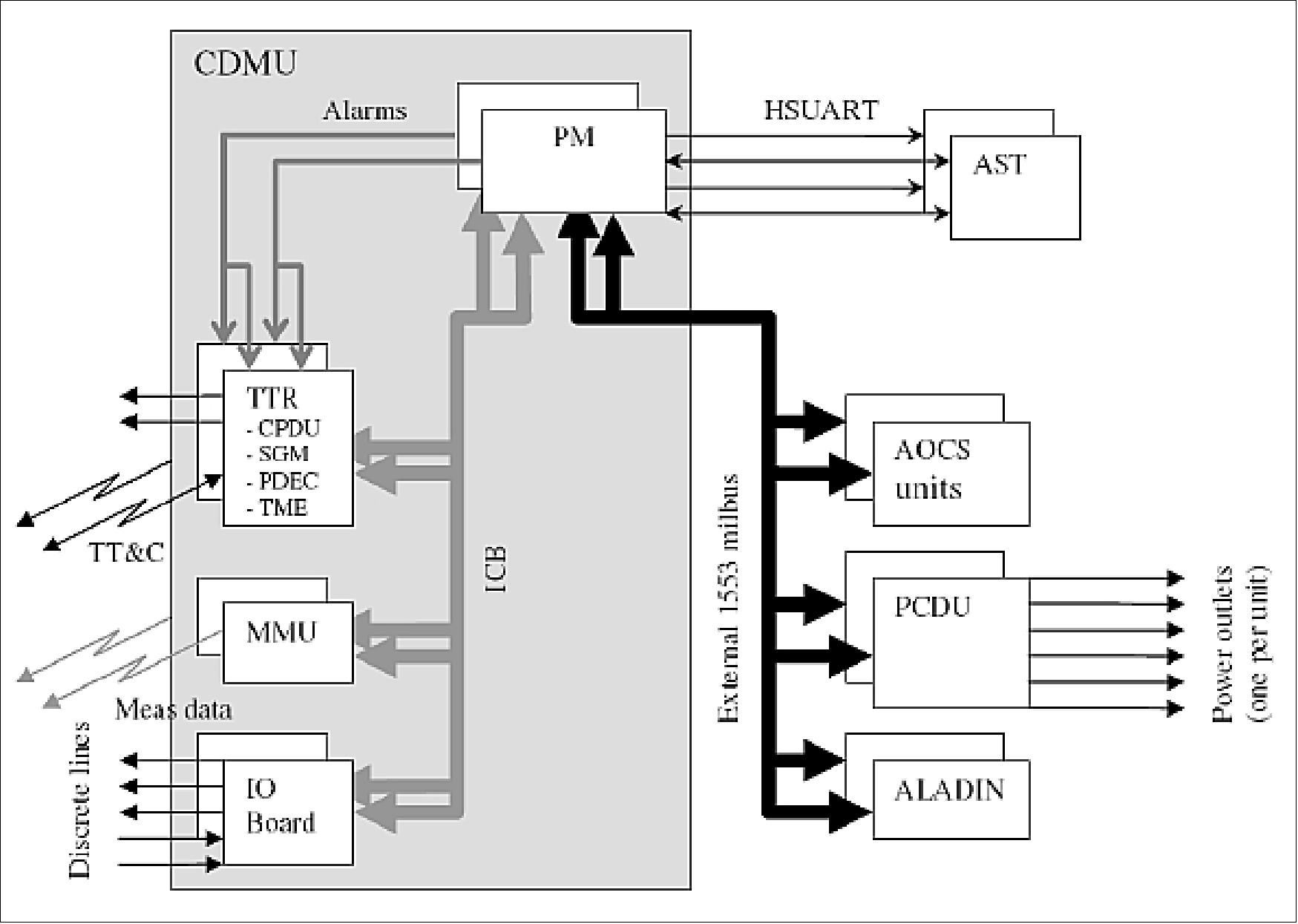
At the heart of the avionics architecture were the CDMU (Command and Data Management Unit) manufactured by RUAG, Sweden and the PCDU (Power Conversion and Distribution Unit) manufactured by Patria, Finland. 17) 18)
The CDMU included redundant processor modules interfaced by a MIL-STD-1553 bus protocol based ICB to IO boards providing input / output services including thruster drivers, mass memory units for measurement data storage and the TTR (Telemetry Telecommand and Reconfiguration) boards incorporating, telecommand packet decoders, telemetry encoders, RMs (Reconfiguration Modules) and SGM (Safe Guard Memory). The RMs monitor alarms generated autonomously within the PM (Processor Module) or from the APSW (Application Software) and performed reconfiguration and restart of the PMs accordingly.
The SGM was a permanently powered memory used to preserve data during PM reconfigurations and restarts. Each PM had two software images stored in non-volatile memory, a nominal mode image and a safe mode image. The RMs selected which image to download into RAM and execute.
Except for the AST (Autonomous Star Tracker) subsystem, the CDMU was interfaced to all external units either via discrete lines provided by the IO boards or via an external MIL-STD-1553 bus. Each PM included separate bus controllers allowing the active PM to control both the ICB (Internal Control Bus) and the external MIL-STD-1553 bus independently. The AST, manufactured by Terma in Denmark, was interfaced directly to each PM via an RS422 HSUART (High Speed Universal Asynchronous Receiver Transmitter).
The PCDU, which interfaced to the CDMU via the external Mil-STD-1553 bus, provided regulated and unregulated power outlets, shunt and battery charge control, solar array deployment thermal knife control and individually switched heater lines for thermal control.
The power outlets supplying the TT&C receivers and the reconfiguration units were non-switchable and were protected by FCLs (Foldback Current Limiters). All other outlets were switched and protected by LCLs (Latching Current Limiters). The shunt regulation and battery charge control were fully implemented in the PCDU electronics and required no involvement from ground or the on-board software under both nominal and failure conditions. Thermal knife drivers and deployment micro-switch status acquisition and conditioning were provided to support solar array deployment.
On-board autonomy architecture: One of the simplest methods to achieve on-board autonomy was to implement an on-board schedule that was loaded fully under ground responsibility.
Such an autonomy approach was straight forward to test and validate since only basic functionalities such as command insertion, command deletion and command execution at scheduled time had to be tested. In particular there was no need to develop and test any logic relating one command to another and there was no need to develop and test any logic for selecting which commands to schedule. This was the approach adopted for ADM-Aeolus with two simple schedules being implemented, one based on time and the other based on orbit position.
Although this approach worked well under nominal circumstances, it was not tolerant to failures that occur in the system such that, by the time the commands were due for execution, they were no longer valid or allowed. In particular such a system design approach was vulnerable to the following:
1) The scheduled commands addressing a physical unit that has failed and has been replaced by its redundant unit.
2) A scheduled command failing to execute successfully because a reconfiguration is occurring.
3) Commands to one unit being only allowable if another unit or subsystem is in a particular state and must not be executed if this condition is not met.
4) Scheduled commands being part of a functional sequence of commands and so dependending on the successful execution of previous scheduled commands.
5) Complex critical operations, such as solar arrays deployment, requiring the execution of decision branches and had to be executed even if the CDMU was reconfigured or restarted.
During the design stage the potential vulnerability of the AEOLUS scheduled operations to the above cases was assessed and the solutions taken to avoid them (Ref. 17).
FDIR (Failure Detection, Isolation and Recovery):
The overall FDIR concept adopted in Aeolus was driven by the objective to minimize ground intervention both during nominal operations and in failure scenarios.
The autonomous multi-layer FDIR architecture had to include monitors to identify all failures that:
- Directly endangered the unit itself or risk propagation to other units as identified in the Satellite and lower level FMECAs (Failure Modes and Effects Criticality Analysis)
- Corrupted or significantly degraded functions necessary for the correct functioning of the spacecraft in the current spacecraft mode / configuration [these failures might have been identified in the FMECAs and HSIAs (Hardware Software Interaction Analysis) or might have been "feared events"]
- Corrupted or significantly degraded functions necessary for data dissemination to the ground.
A high speed FDIR MIL-STD-1553 bus was established to monitor bus protocol status messages to identifying a loss of communication and allowing start of recovery within 1 second. For each unit, feared events were identified based on the function of the unit in the overall design and also based on the satellite and unit FMECA and HSIA documents (Ref. 17).
The Aeolus FDIR concept was built around top-down onboard control architecture: (Ref. 12)
• At the highest level hot redundant TTR(TM, TC and Reconfiguration) boards within the CDMU contained Reconfiguration Modules which oversaw the health and function of the CDMU and flight software by monitoring hardware alarm inputs and performing CDMU resets, reconfigurations and switches to Safe Mode as appropriate.
• At the next level the CDMU application software monitored and controlled the spacecraft units by monitoring on board parameters and autonomously sending control commands in response to parameter out of range events.
• At the lowest level some units performed their own built-in health checks and reported this through the TM to the CDMU software.
For the platform functions, the FDIR needed to ensure that the spacecraft could safely recover from single level failures either by resuming operations autonomously or by switching to predefined redundant configurations. For ALADIN, the FDIR needed to ensure instrument safety by both stopping scheduled operations and switching the instrument into a safe and stable configuration or by switching ALADIN into Survival mode.
Redundancy princple: In case of on-board failure detection during any of the mission phases, the on-board control system could attempt to recover operational status by switching to redundant units. In order to avoid the loss of platform functions mandatory for the mission, the redundancy concept had to be such that a single failure did not cause permanent loss of essential platform functions. All units had to therefore be independent of their redundant alternatives. This included provisions to prevent malfunction or elimination of redundant units by a common cause.
The S/C mass at launch was about 1360 kg of which 266 kg were allocated to the payload. Its size was 1.74 m x 1.9 m x 2.0 m in launch configuration, limited by the payload envelop. The solar arrays of 13 m span had three panels on each side. The design life was 3 years. The prime spacecraft contractor was EADS Astrium Ltd., Stevenage, UK (contract award in Oct. 2003). Further Astrium sites in Germany and France were involved in the spacecraft development. 19) 20) 21) 22)
RF communications: TT&C communications were based on standard S-band links, the uplink data rate was 2 kbit/s the downlink data rate was up to 8 kbit/s. The measurement data were dumped via an X-band transmitter with 10 Mbit/s data rate. S/C operations were performed at ESOC (Darmstadt, Germany) using the Kiruna TT&C station. - The measurement data were received nominally by the ground station in Svalbard (Spitzbergen). Additional X-band receiving stations (antenna diameter as small as 2.4 m) could easily be added to provide a shorter data delivery time.
Launch
The Aeolus spacecraft was launched on 22 August 2018 (21:20 GMT) on a Vega vehicle, designated VV12, from Kourou, French Guiana. Some 55 minutes later, Vega's upper stage delivered Aeolus into orbit and contact was established through the Troll ground station in Antarctica. The satellite was controlled from ESA's ESOC (European Space Operations Center) in Darmstadt, Germany. Controllers spent the next few months carefully checking and calibrating the mission as part of its commissioning phase. 23) 24) 25)

On Sept. 7, 2016, ESA and Arianespace signed a contract to secure the launch of the Aeolus satellite. With this milestone, a better understanding of Earth's winds was another step closer. With the main technical hurdles resolved and the launch contract in place.
In 2015, a launch of ADM-Aeolus was expected in 2017 (the original launch date was 2007, then in 2011). The launch vehicle was Vega and the launch site was Kourou. 26) 27)
Baseline change in the autumn of 2010: Change from burst mode to "continuous mode" operation.
An in-depth review of the ALADIN laser, involving independent laser experts, identified the need to make some substantial modifications to the current design in order to regain adequate performance margins for the three years of in-orbit operation. The most significant modification was a change of the operational principle, from ‘burst' to ‘continuous' mode. A requirement review was completed to define the associated requirements mode.
Stable and complete versions of the end-to-end simulator and ground payload data processing software were available, but they needed to be upgraded to support the new continuous mode of the ALADIN instrument. These significant changes to the instrument design delayed the planned launch date to mid-2013. 28) 29) 30)
Orbit
Sun-synchronous orbit, altitude = 320 km (mean), inclination = 96.97º, local equator crossing time at 18:00 (on ascending node) and at 06:00 hours (dawn-dusk orbit), 7-day repeat cycle (111 orbits).
Mission Status
• July 28, 2023: ESA’s wind mission, Aeolus, reentered Earth’s atmosphere on 28 July at around 21:00 CEST above Antarctica, confirmed by US Space Command.
The reentry comes after a series of complex manoeuvres that lowered Aeolus’ orbit from an altitude of 320 km to just 120 km to reenter the atmosphere and burn up.
These manoeuvres formed the first assisted reentry of its kind, and positioned Aeolus so that any pieces that may not have burned up in the atmosphere would fall within the satellite’s planned Atlantic ground tracks. As no regulations regarding satellite reentry were in place when Aeolus was designed in the late 1990s, this assisted reentry was carefully designed by ESA to improve the safety of the end of life procedure. 106)
• May 8, 2023: Aeolus engineers and industry partners have carefully worked out how to best position Aeolus in Earth’s atmosphere to target open ocean waters upon reentry, hugely reducing the amount of land over which fragments pieces could fall.
- Over the next few months, Aeolus will descend naturally from its current altitude of 320 km to 280 km. At this point, spacecraft operators at ESA’s mission control centre, ESOC, in Darmstadt, Germany, will gradually lower it to 150 km above Earth’s surface. The satellite will burn up as it descends to around 80 km.
The final date of re-entry depends on how solar activity speeds up the process, but Aeolus is expected to be no more before the end of August. 105)
• April 18, 2023: ESA announced that on 30 April 2023, all nominal operations of Aeolus, the first mission to observe Earth’s wind profiles on a global scale, will conclude in preparation for a series of end-of-life activities.
Although a recent upgrade to Aeolus’ onboard laser instrument meant that in its last months it has been performing as well as ever, diminishing fuel combined with increasing solar activity means the mission must come to an end.
- Over the past year, scientists and industry specialists have been designing a detailed roadmap to bring the Aeolus mission to a close. After much consideration and careful planning it was decided that the best course of action is to carefully re-enter the satellite back to Earth.
The finishing touches to the end-of-life schedule will be made over the coming weeks and a timeline will be announced in due course.
- In the meantime, Aeolus will provide data as usual up to the end of operations on 30 April 2023. While no new operational data will be gathered after 30 April, the mission's existing data will still be available to users. 104)
• April 26, 2022: Launched back in 2018, Aeolus has outlived its 36-month in-orbit design life – but going above and beyond, it continued to deliver excellent data. This showed that there was life yet in the satellite, meaning ESA's wind mission was then expected to continue shining a light on the wind for another year. 31)
- Heralding the start of the Aeolus Third Anniversary Conference in Taormina, Sicily, which highlighted the continued importance of this pioneering wind mission, the Aeolus Mission Manager, Tommaso Parrinello, said, "I believe that the best is still to come, and I'm pleased to announce that with a switch of the laser we are extending the lifetime of this remarkable mission hopefully for another year."
- Named after Aeolus, who in Greek mythology was appointed ‘keeper of the winds' by the Gods, Aeolus was a one-of-a-kind satellite that measured wind from space. It was one of ESA's Earth Explorers missions, which use advanced space technologies to answer critical questions about Earth's natural processes and the impact that human activity is having.
- Pulses of ultraviolet light fired from Aeolus' ALADIN laser towards Earth were reflected from air molecules and particles in the atmosphere. Two optical analysers measured the Doppler shift of the molecular scattering, ‘Rayleigh', and scattering from aerosols and water droplets, ‘Mie'. By analysing these Doppler shifts, it was possible to estimate wind speed and direction at various altitudes worldwide, making Aeolus the first satellite mission to deliver profiles of Earth's wind on a global scale.
- The uses for Aeolus wind data were many, from predicting the weather and improving climate models, to tracking events in near-realtime, such as the recent Hunga Tonga volcanic eruption.
- Despite exceeding its initial lifetime, meteorology experts at the Taormina conference expressed the value Aeolus data continue to have.
- "Forecast Sensitivity Observation Impact shows that Aeolus is amongst the most important satellite missions, which is an impressive result for a demonstrator," said Mike Rennie of the European Centre for Medium Range Weather Forecasts (ECMWF).
- Nothing connects us quite like the weather. Whether it's to understand what coat to wear, or to determine climate expectations tomorrow, being able to predict it as accurately as possible is key.
- Although Mike showed that although the positive impact of the data obtained in 2019 was roughly twice as big as it is now, Aeolus proved to be useful for numerical weather prediction.
- "Although the Rayleigh impact is gradually declining as the instrument noise increases, the Forecast Sensitivity Observation Impact shows that Aeolus is still beneficial," added Mike.
- Gemma Halloran of the UK Met Office, where an expanded Aeolus dataset will be operational in May, concurred, saying, "Almost all weather models improved with the assimilation of Aeolus data."
- Vivien Pourret of Météo France also presented data that put Aeolus amongst the best instruments for improving weather forecasts, third overall in terms of improvement per observation. He noted, "The goal is to operationally assimilate Aeolus data for as long as possible."
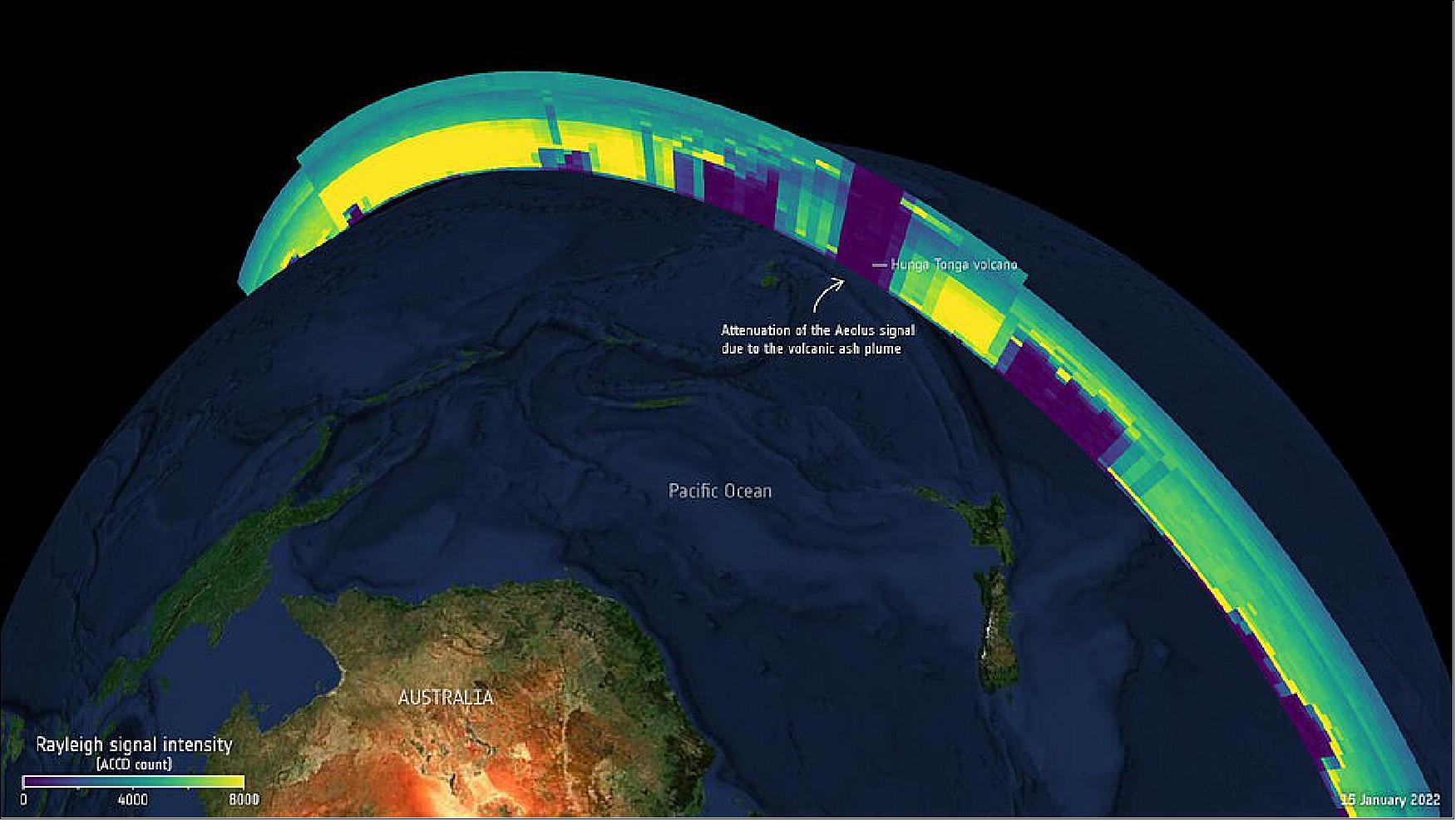
Aeolus Helped Track Hunga Tonga Eruption
- Aeolus was also proving helpful for tracking events such as volcanic eruptions, thanks to near-realtime data reaching the user within three hours via the Aeolus Virtual Research Environment. Earlier in 2022, scientists working on the Aeolus Data Science Innovation Cluster used the online visualisation tool to track the Hunga Tonga volcanic eruption.
- On 15 January 2022, a huge blip, or drop, in the Aeolus signal over the region of the eruption suggested the plume of volcanic ash must have reached an altitude above the range of Aeolus, as shown in the image of Figure 7. The image of Figure 8 uses data from three days later, from 18 January, and shows how Aeolus could track the volcanic plume widening and spreading westwards over Australia.

- After increasing the satellite's range of measurements, by the end of January the whole plume was clearly visible in the stratosphere.
- The usefulness of such analyses was made clear by Anna Kampouri of the National Observatory of Athens, who in Taormina also showed how Aeolus data improved models of Mount Etna's ash plume as it travelled across Greece in March 2021.
- The effect was important to warn the airline industry of potential hazards, as encounters with ash clouds in high concentrations could reduce visibility and damage aircraft engines.
The Future is Bright for Doppler Wind Lidars in Space
- While Aeolus was set for at least another year, discussions in Taormina inevitably led to potential follow-on missions. "The value of Aeolus is not only scientific, but also economic and societal," said ESA's Director of Earth Observation Programmes Simonetta Cheli in her opening address in Taormina. "Following the success of Aeolus and the operational assimilation of data into weather forecast models, it's clear there is growing support for a follow-on mission."
• December 14, 2021: It was hard to believe that ESA's Aeolus wind mission had now been orbiting Earth for three years and, remarkably, exceeded its design life milestone. Aeolus has gone way further than its original goal of demonstrating that ground-breaking laser technology can deliver global profiles of the wind; its data was distributed to weather forecasting services across the world in less than three hours of measurements being made in space. Moreover, Aeolus had laid the foundation for future Doppler wind lidar satellite missions. 32)
- Being such a dynamic and relatively invisible aspect of Earth's environment, the wind is particularly challenging to measure from space. Nevertheless, the need for these measurements was identified many years ago by, for example, the World Meteorological Organization which was responsible for the World Integrated Global Observing System. This system, which comprises a vast number of meteorological and environmental observations taken from the ground, ships, upper atmosphere and space, was used by meteorological services all over the world.
- As part of ESA's FutureEO programme, Aeolus was an Earth Explorer research mission. But it was also designed to demonstrate how sophisticated Doppler wind lidar technology could address the need for more wind measurements to improve weather forecasts.
- Aeolus' single instrument is called ALADIN. Its laser transmits short fast pulses of ultraviolet light towards Earth. This light bounced off air molecules and particles such as dust in the atmosphere. The small fraction of light that scattered back towards the satellite was collected by a large telescope. All of this allowed the horizontal speed of the world's winds to be measured in the lowermost 30 km of the atmosphere.
- Over the last three years, scientists have been using information from Aeolus to understand more about the systems that influenced our weather and climate.
- However, its greatest achievement was the fact that the quality of Aeolus' data were so good that meteorological centres had been feeding the data into daily weather forecasting models since January 2020.
- This has been particularly relevant during the Covid pandemic, which, in the spring of 2020, led to a drop in the number of commercial flights that normally provide unique measurements of wind, temperature and pressure along their flight paths. With fewer measurements being made available from aircraft for weather forecasts, Aeolus has been an important contributor in helping to fill the gap.
- ESA's Aeolus mission scientist, Anne Grete Straume, said, "Aeolus has been a great boost to helping us understand the complexities of Earth's wind systems and how they influence the weather and the climate as described in a recent paper published in Geophysical Research Letters. 33)
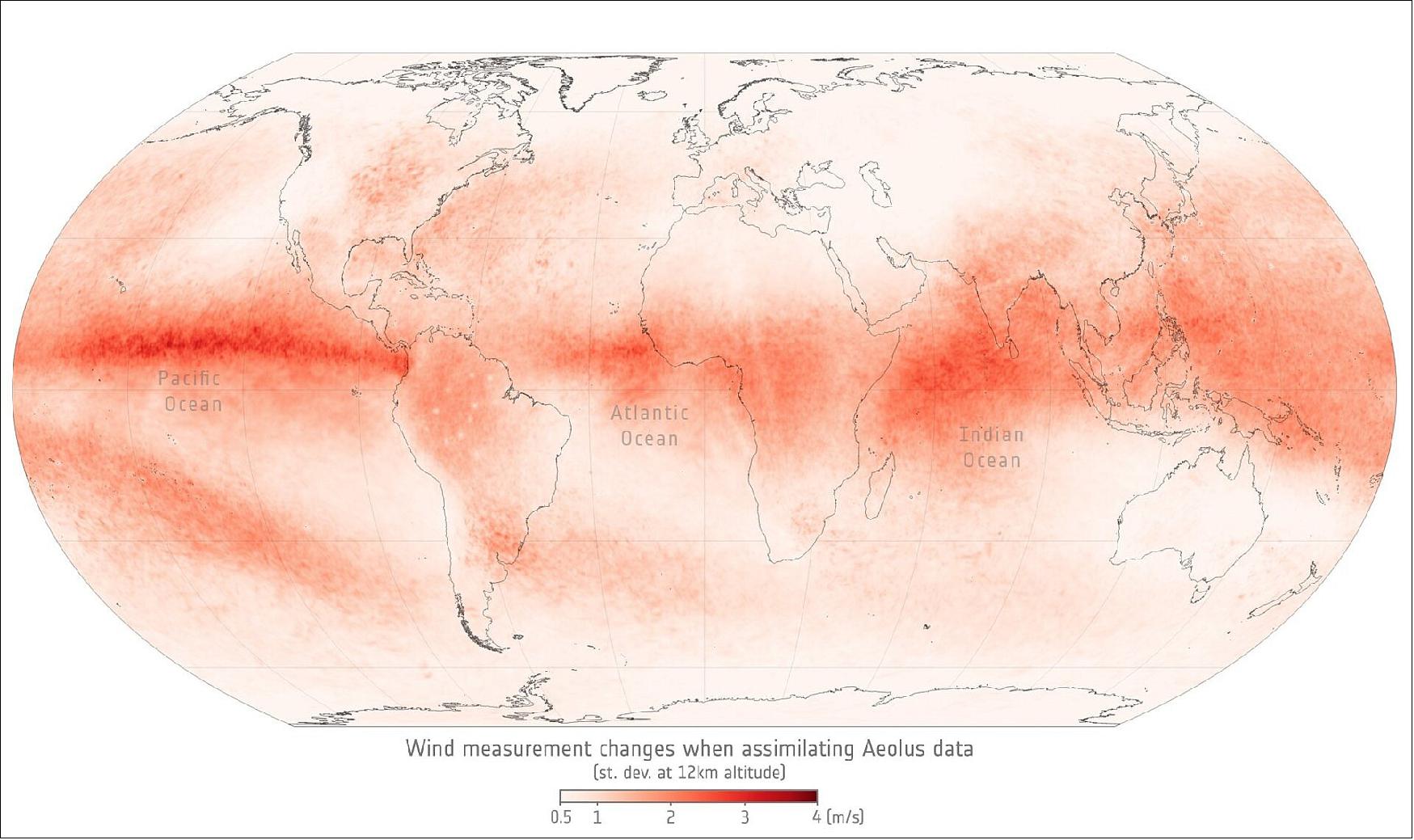
- "The paper shows how Aeolus' observations in the tropical upper troposphere and lower stratosphere have helped correct weather models to better represent the atmospheric flow by capturing wind shear caused by Kelvin waves.
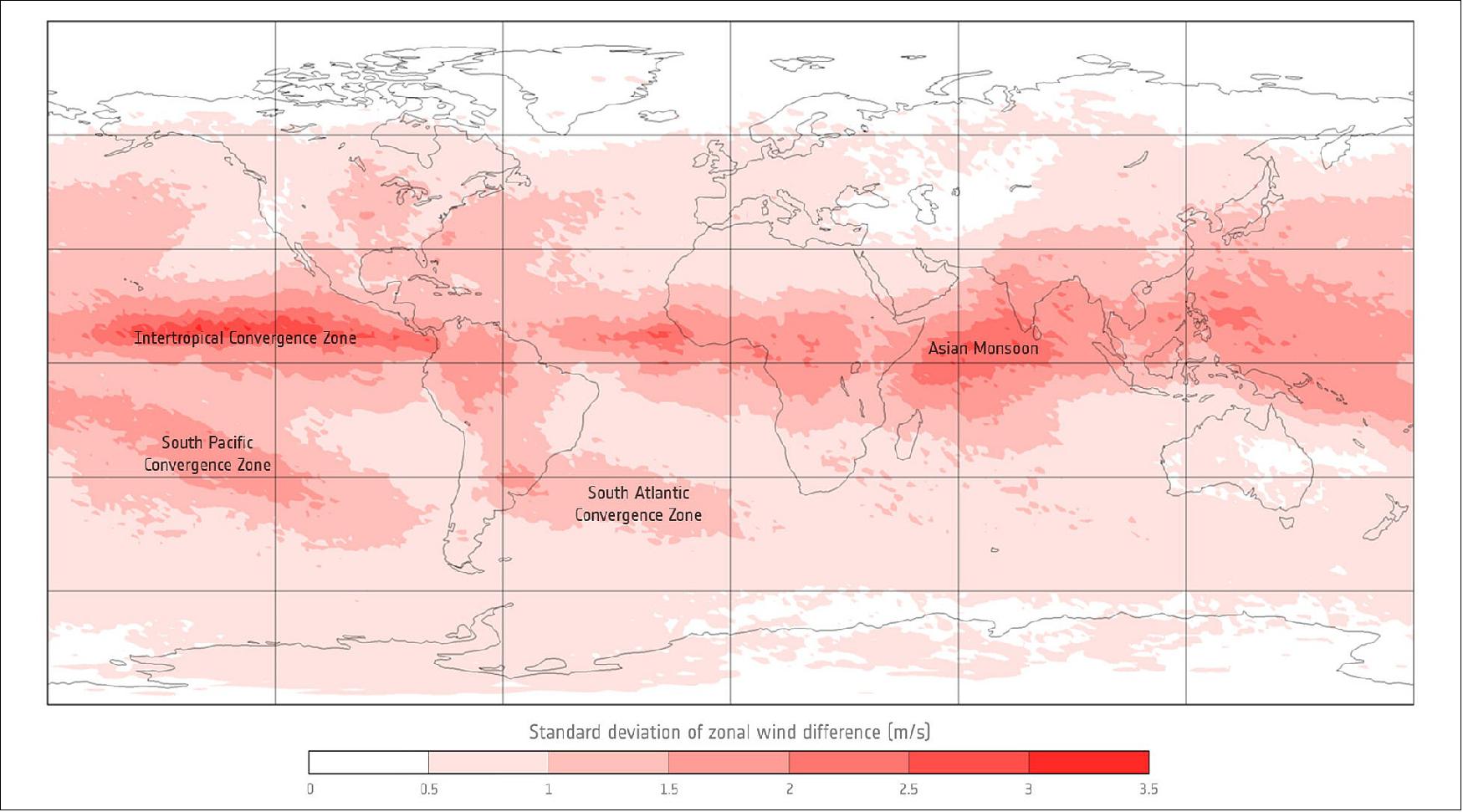
The figure shows the standard deviation of the difference in zonal winds for ECMWF model analysis over a period of six months, at 200 hPa level, with and without Aeolus winds. The larger the difference, the more Aeolus winds changed the model wind fields. Aeolus winds also changed the model in the South Pacific and South Atlantic convergence zones (SPCZ and SACZ), which is home to the southern hemispheric storm region and the ‘roaring forties'. In these areas, the use of Aeolus wind observations tied the model closer also to other sparse but very accurate weather observations, for example by routine weather balloon soundings (image credit: ECMWF–M. Rennie)
- "Thanks to the quality and uniqueness of the data, four European weather centres have been using Aeolus' data for their daily forecasts since 2020, and India's National Centre for Medium Range Weather Forecasting centre also started benefiting from Aeolus this year. This demonstrates that Aeolus has clearly achieved a key objective of being used for daily forecasts, but also demonstrates how the technology can be used for follow-on missions."
- The Aeolus mission was under development for several years before it was finally launched in 2018. The lidar technology was completely new and challenging to realise.
- ESA's Aeolus Payload Manager, Denny Wernham, noted, "Aeolus was extremely challenging to develop. It was designed as a demonstrator mission and astonishingly we still have it in good health and delivering valuable data for science and weather forecasting three years after going live in orbit. Thanks to Aeolus, we have gained valuable experience and knowledge for the development of possible future Doppler wind lidar satellites in space."
- While the mission has certainly demonstrated that this laser technology works in space, an observatory in Argentina that searches for cosmic rays has also discovered that spaceborne lidars could help cross-calibrate the energy scales of different cosmic-ray observatories.
- Scientists from the Institute for Astroparticle Physics of the Karlsruhe Institute of Technology in Germany and the National Institute for Nuclear Physics in Italy who study cosmic rays from outer space using information from the Pierre Auger Observatory in Argentina, noticed an unexpected reoccurring signal in their data. Together with scientists from the Institute of Atmospheric Physics of the German Aerospace Center, they figured out that the observatory was detecting a signal emitted by Aeolus.
- The observatory was used to study the origin of ultrahigh-energy cosmic rays. Wide-field optical telescopes detect fluorescence radiation emitted from nitrogen molecules excited as cosmic-ray-induced particle cascades. The strongest fluorescence lines are in the ultraviolet, close to the 355 nm frequency of the Aeolus laser. Aeolus' laser signal swept across the observatory's view every week.
- Michael Unger, from the Karlsruhe Institute of Technology, explained, "We plan to use this laser beam from space for systematic studies of the density of aerosols above the observatory and for the calibration of our telescopes. Future satellite-based lidar missions could be designed to aid the cross-calibration of the energy scales of different cosmic-ray observatories."
- The observatory was also helping ESA to understand more about the complexities of spaceborne lasers.
- Toni Tolker-Nielsen, Acting Director for ESA's Earth Observation Programmes, added, "The Pierre Auger Observatory's work has also been extremely important in providing new insights and independent evidence that will help us in our further understand the technical complexities of using lasers in space. These results confirm that cosmic ray observatories can offer an independent and powerful method to measure the performance of Earth observation satellite lasers, paving the way to future collaboration with other missions."

• September 20, 2021: For a team of scientists and technicians from Europe and the US, the fact of ‘going back to the office' this September has meant heading off to the Cabo Verde islands in the Atlantic – not to extend their summer holidays, but for a complex international experiment campaign that will scrutinize the data being delivered by one of today's most innovative Earth observation satellites: ESA's Aeolus wind mission. 34)
- Since it was launched, Aeolus has exceeded expectations and frequently hailed a remarkable success. It was developed as a research mission and to demonstrate how novel laser technology could deliver vertical profiles of Earth's wind. These measurements were much needed, for example by the World Meteorological Organization's Global Observing System, which is a coordinated system of methods and facilities for making meteorological and environmental observations on a global scale.
- Despite Aeolus being built as a research and demonstrator mission, it has proven to be so good that, for a few years, its data have been distributed publicly to forecasting services and scientific users in less than three hours of measurements being made from space (see Figure 18).
- Playing such an important part in forecasting, and with a potential follow-on satellite mission on the table, it is critical to ensure that its data are accurate, particularly for forecasts in the Tropics where large weather systems develop and where Aeolus is said to be making a real difference.
- Hence, scientists from ESA, NASA, the German Aerospace Center (DLR), the French National Centre for Scientific Research, the CNES French space agency, Météo-France, Atmospheres Spatial Observations Laboratory, the National Observatory of Athens, the Leibniz Institute for Tropospheric Research, the University of Nova Gorica, the Ocean Science Centre Mindelo, and from many other institutes had all joined forces in Cabo Verde and also in the Virgin Islands for the Aeolus tropical Atlantic campaign.
- The Cabo Verde islands lie about 600 km off the coast west Africa. This tropical location was not only relevant for Aeolus, but it was also where strong winds often carry desert dust and aerosols from the African continent across the islands, making it an ideal place for investigating cloud–aerosol interaction and atmospheric dynamics.
- Throughout the month, this intrepid team took measurements of the wind, aerosols and clouds with a range of instrumentation on different aircraft flying at different altitudes.
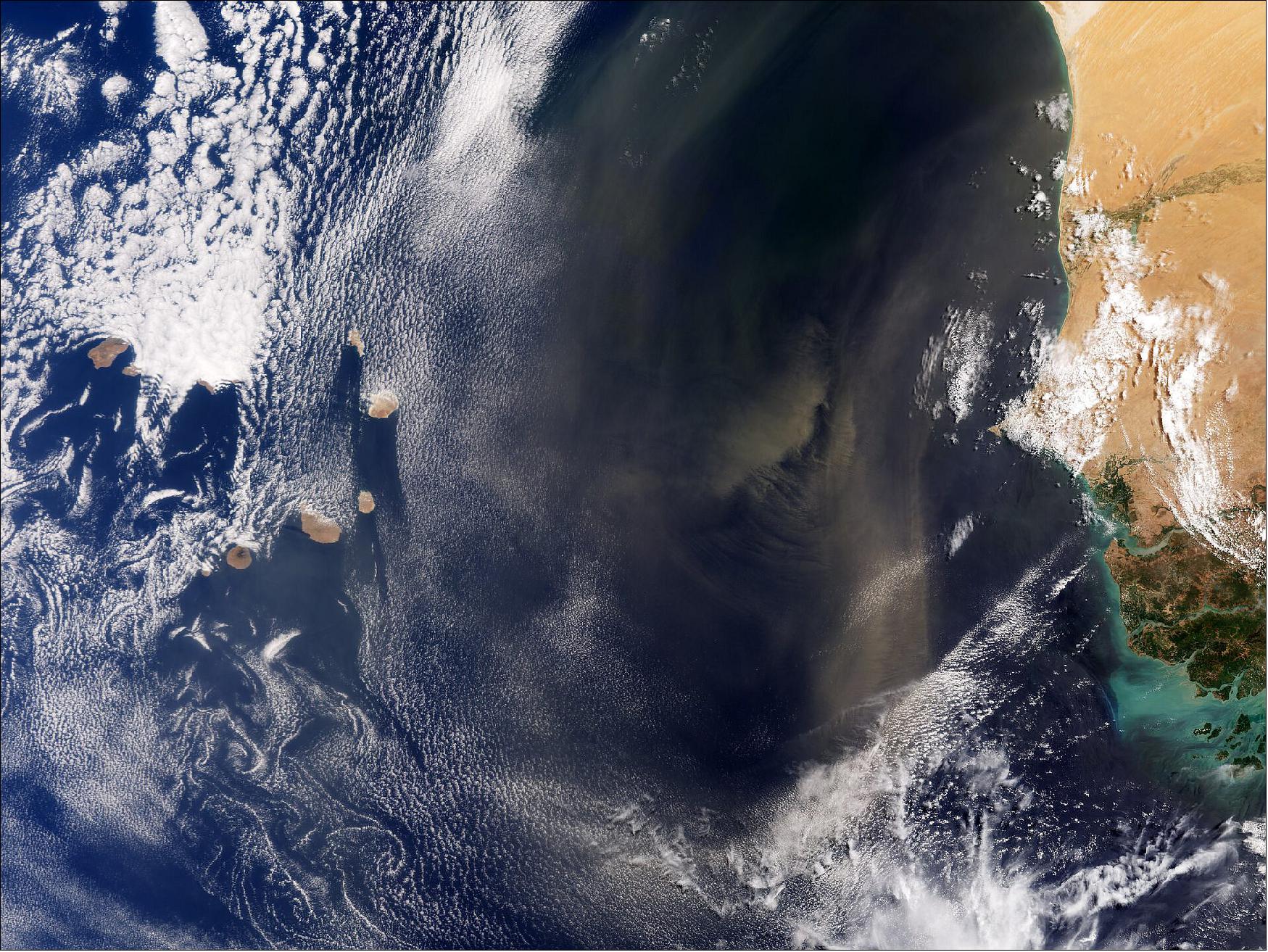
- Many flights are even coinciding with Aeolus as it orbits above. Measurements are also being taken by lasers and radars on the ground. This is all providing a wealth of data to compare with that from Aeolus and to support the science to tropical weather.
- Thorsten Fehr, head of the atmospheric section at ESA, said, "We had hoped to run the field campaign last year, but of course the COVID pandemic thwarted our plans. It is an extremely complicated campaign and has been a mammoth task for us and our teams to arrange.

As the photo shows, the aircraft were packed with instruments. Many flights were even planned to coincide with Aeolus as it orbits above. Measurements were also being taken by lasers and radars on the ground. This provided a wealth of data to compare with that from Aeolus and supported the science to tropical weather (image credit: ESA)
- "This is truly an international effort and we are all thrilled to have the campaign now well underway, especially given COVID. I can't thank everyone enough for all the work they've done to make it a reality."
- "This extraordinary experiment campaign brings huge benefits, not only to our Aeolus mission, but also to our upcoming EarthCARE mission that is set to advance our understanding of the role that clouds and aerosols play in reflecting incident solar radiation back out to space and how the trap infrared radiation emitted from Earth's surface."
- "In addition, the data we collect will help in development of an Earth Explorer mission concept called Wivern, which aims to measure wind in clouds."
- "You could never achieve an experiment of this scale without working together. International collaboration is key to so much of what we do, and we naturally build strong bonds our colleagues. So, we were deeply saddened by the sudden loss of a dear NASA colleague last week, which understandably led to NASA having to suspend their operations. Our thoughts and sincere condolences go to Gail Skofronick-Jackson's family, friends and colleagues."
- ESA's Aeolus mission manager, Tommaso Parrinello, said, "We are all extremely shocked by the tragic loss of Gail. NASA had been supporting our campaign in the Virgin Islands well before the fleet of European aircraft arrived in Cabo Verde and they had planned to join the team here for their second part of the campaign.
- "We now hope that we will be able to resume this part of the campaign next year."

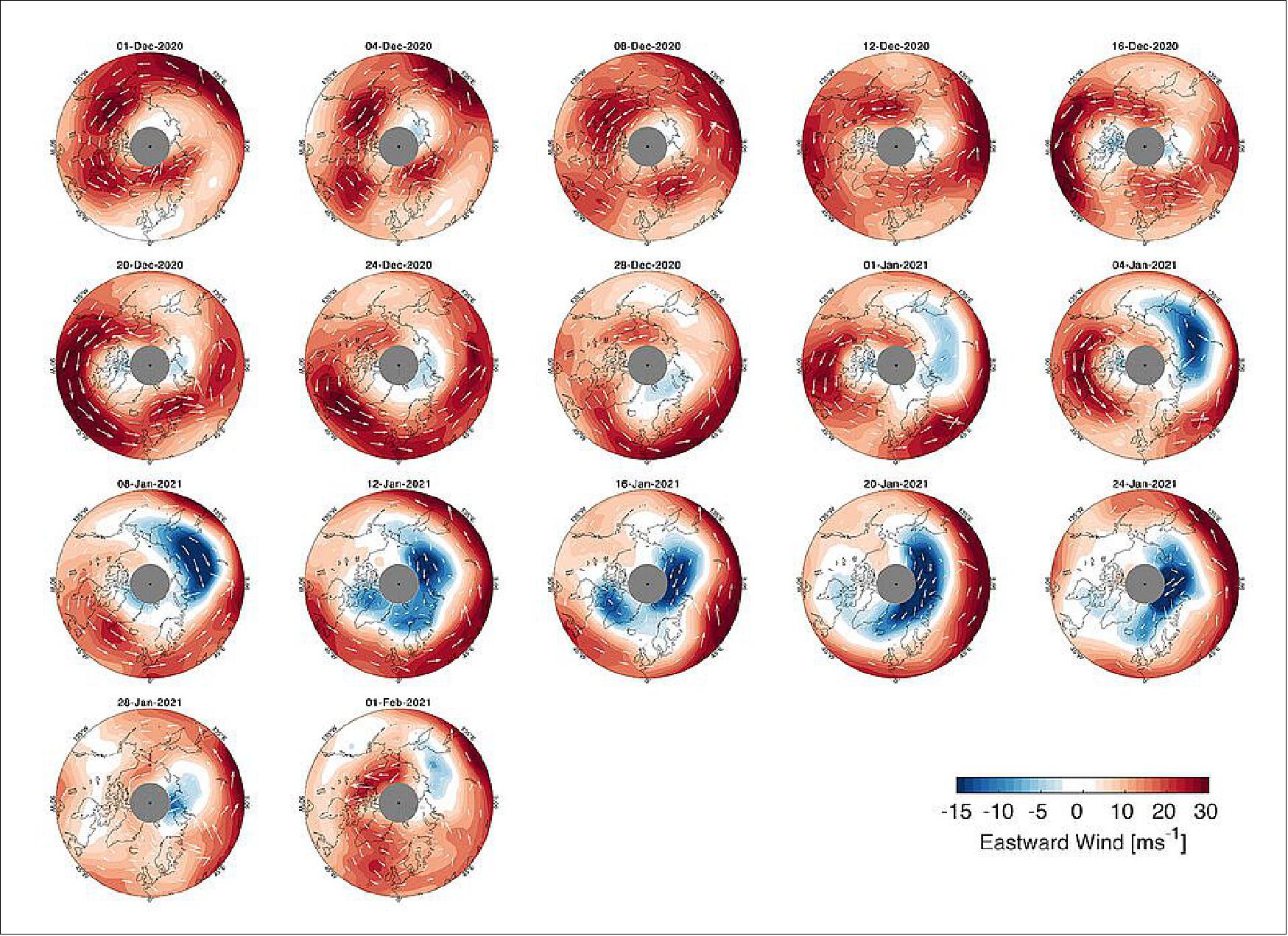
• February 4, 2021: As the winter's polar vortex currently sends extreme icy blasts of Arctic weather to some parts of the northern hemisphere such as the northeast of the US, scientists are using wind information from ESA's Aeolus satellite to shed more light on this complex phenomenon. 35)
- The polar vortex is a huge mass of frigid air high above the North Pole in the polar stratosphere. It is surrounded by a strong jet of air swirling counter-clockwise along the vortex's boundary. The vortex tends to be much stronger in the winter, keeping bitter cold air locked in around the Arctic.
- However, sometimes the vortex could weaken, become distorted or even split into two and meander further south, affecting the weather and jetstream further down in the troposphere, potentially bringing unusually cold weather and snow to lower latitudes.
- One meteorological event that can disturb the polar vortex is known as a ‘sudden stratospheric warming', which was what has been happening over the last couple of months. Sudden stratospheric warmings happen to some extent every year, but the current event has been categorized as major, and is less common.
- Such dramatic events caused the strong wind around the edge of the polar vortex to weaken or reverse, leading the temperature of the polar stratosphere to rise rapidly by tens of degrees Celsius.
- Since these events could trigger extreme weather in Europe and North America, they were of scientific and practical interest. However, the processes involved were not fully understood, and until recently there have been major technical challenges in measuring wind from space, which was needed to measure and monitor such a large-scale event.
- Fortunately, scientists had ESA's Aeolus satellite at hand to help understand more about why and how the polar vortex was pushed off balance.
- Aeolus was the first satellite in orbit to profile directly Earth's winds from space.
- It worked by emitting short, powerful pulses of ultraviolet light from a laser and measures the Doppler shift from the very small amount of light that is scattered back to the instrument from molecules and particles to deliver profiles of the horizontal speed of the world's winds mostly in the east-west direction in the lowermost 26 km of the atmosphere.
- Although Aeolus only measured wind in the lower part of the atmosphere, the lower part of the current stratospheric polar vortex jet left a signature in the satellite's data.
- Corwin Wright, Royal Society research fellow at the University of Bath in the UK, said, "Changes in the wind structure in a sudden stratospheric warming event have never been observed directly at a global scale before. So far, our understanding of these changes has been developed using point measurements, measurements along localized aircraft flight tracks, through the use of temperature observations, and, primarily, computer models and assimilative analyses.
- Anne Grete Straume, ESA's Aeolus mission scientist, commented, "We are currently observing a polar vortex event where we see it split into two, with one spinning mass of air over the North Atlantic and one over the North Pacific.
- "The split leads to changes in the tropospheric circulation allowing cold air masses from the poles to more easily escape down to lower latitudes. At the moment, parts of North America seem to be experiencing colder weather than Europe, although we have seen events of cold air reaching quite far south in Europe over the past few weeks causing, for example, heavy snowfall in Spain."
- "What scientists would also like to understand is whether sudden stratospheric warming events might become more frequent owing to climate change. Also for this, Aeolus wind data will be very important to better understand the mechanisms triggering these weather events."
- "It is early days yet to draw any scientific conclusions from our Aeolus data, but work is certainly underway to shed new light on why this seasonal phenomenon can sometimes be extreme – watch this space."
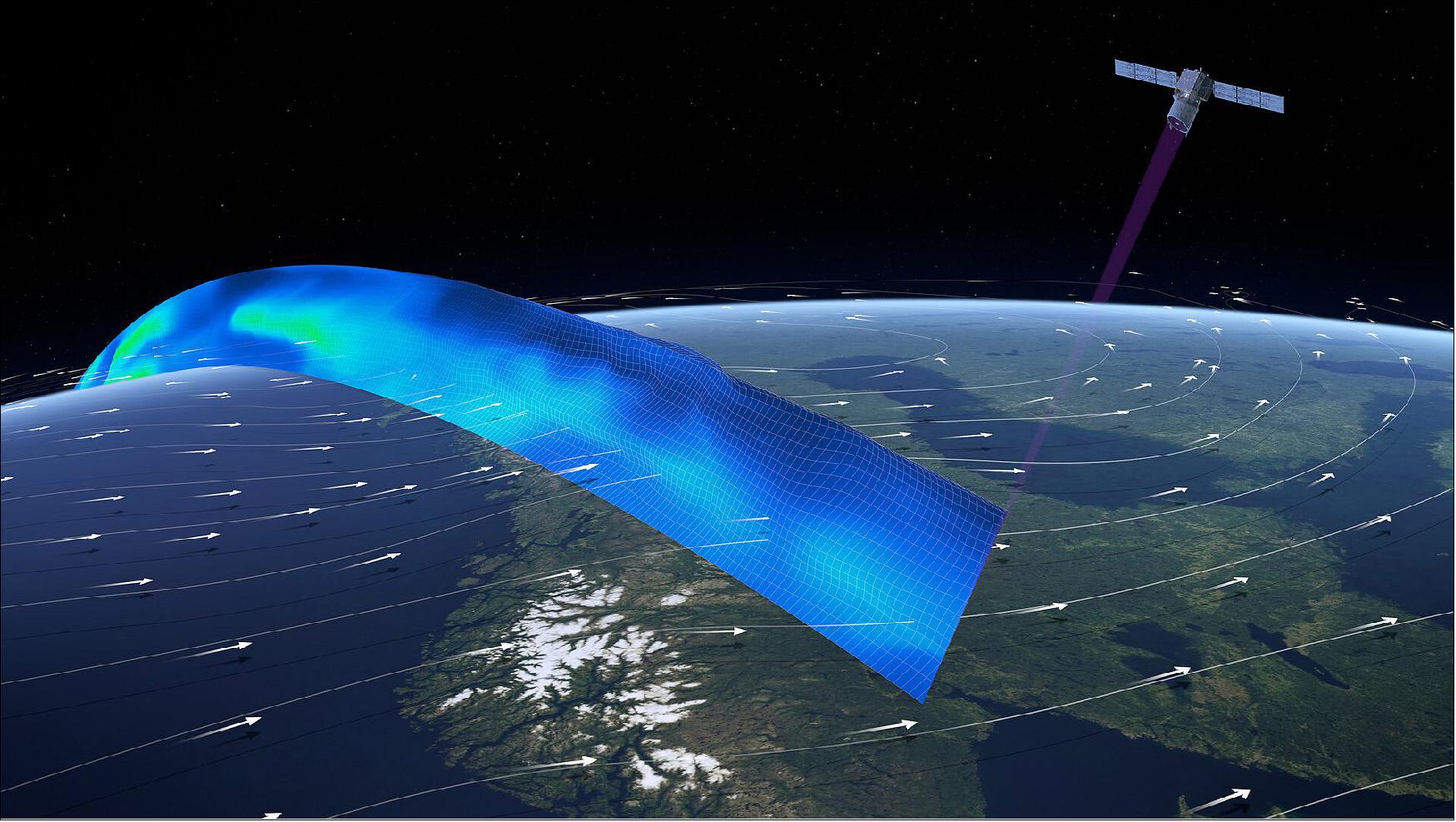
These near-realtime observations will improve the accuracy of numerical weather and climate prediction and advance our understanding of atmospheric dynamics and processes relevant to climate variability (image credit: ESA/ATG medialab)

Scientists are using wind information from ESA's Aeolus satellite to shed more light on the complex polar vortex phenomenon (image credit: ESA, the image contains modified Copernicus Sentinel data (2021), processed by ESA, CC BY-SA 3.0 IGO)
• May 12, 2020: To increase the data downlink possibilities from ESA's Aeolus wind mission, a new receiving antenna in Antarctica has been built. This supplements the ground station in Svalbard and also helps guarantee data delivery in near realtime for weather forecasting. 36)

• May 12, 2020: Delivering new information about Earth's winds, ESA's Aeolus mission has already been hailed a success. Today, this remarkable satellite mission has yet again achieved new heights: its data are now being distributed publicly to forecasting services and scientific users in less than three hours of measurements being made from space. 37)
- Aeolus was one of ESA's Earth Explorer missions, which all set out to demonstrate how new ways of observing Earth can advance our understanding of how the planet works as a system.
- Carrying one of the most sophisticated instruments ever to be put into orbit, Aeolus was the first satellite mission to directly profile Earth's winds from space.
- It worked by emitting short, powerful pulses of ultraviolet light from a laser and measured the Doppler shift from the very small amount of light that was scattered back to the instrument from molecules and particles to deliver vertical profiles that show the horizontal speed of the world's winds in the lowermost 26 km of the atmosphere.
- ESA's Director of Earth Observation Programs, Josef Aschbacher, said, "Aeolus was never going to be an easy satellite mission to develop, and, indeed, it took some years to get it right before it could be launched. The wait was certainly worth it though, and in the 20 months that it has been in orbit, it has gone from strength to strength that will lead to benefits for science and society alike.
- "And, thanks to all the teams involved and in agreement with EUMETSAT, we are very proud to announce that as of today, Aeolus' data are being distributed in near-real time for numerical weather prediction beyond the Aeolus core user community."
- ESA's Peggy Fischer said, "A huge amount of work has gone into perfecting Aeolus' data before today's public release. This satellite technology is completely new so we have had to understand and correct certain biases in the data that were not known before launch."
- "To do this, key Aeolus experts from different organizations worked together in the Data Innovation and Science Cluster team – the Aeolus DISC, to validate and optimize the data processing and bias correction methods."
- ESA's Jonas von Bismarck, added "As the last and particularly tricky bit of the puzzle, a bias related to temperature variations across the instrument's telescope was corrected, making the data ready to be used in numerical weather prediction without the forecast centers having to carry out further complex corrections."
- The ECMWF (European Centre for Medium-Range Weather Forecasts) in the UK has already been including Aeolus data in their forecasts since January, relying on their own bias correction scheme.
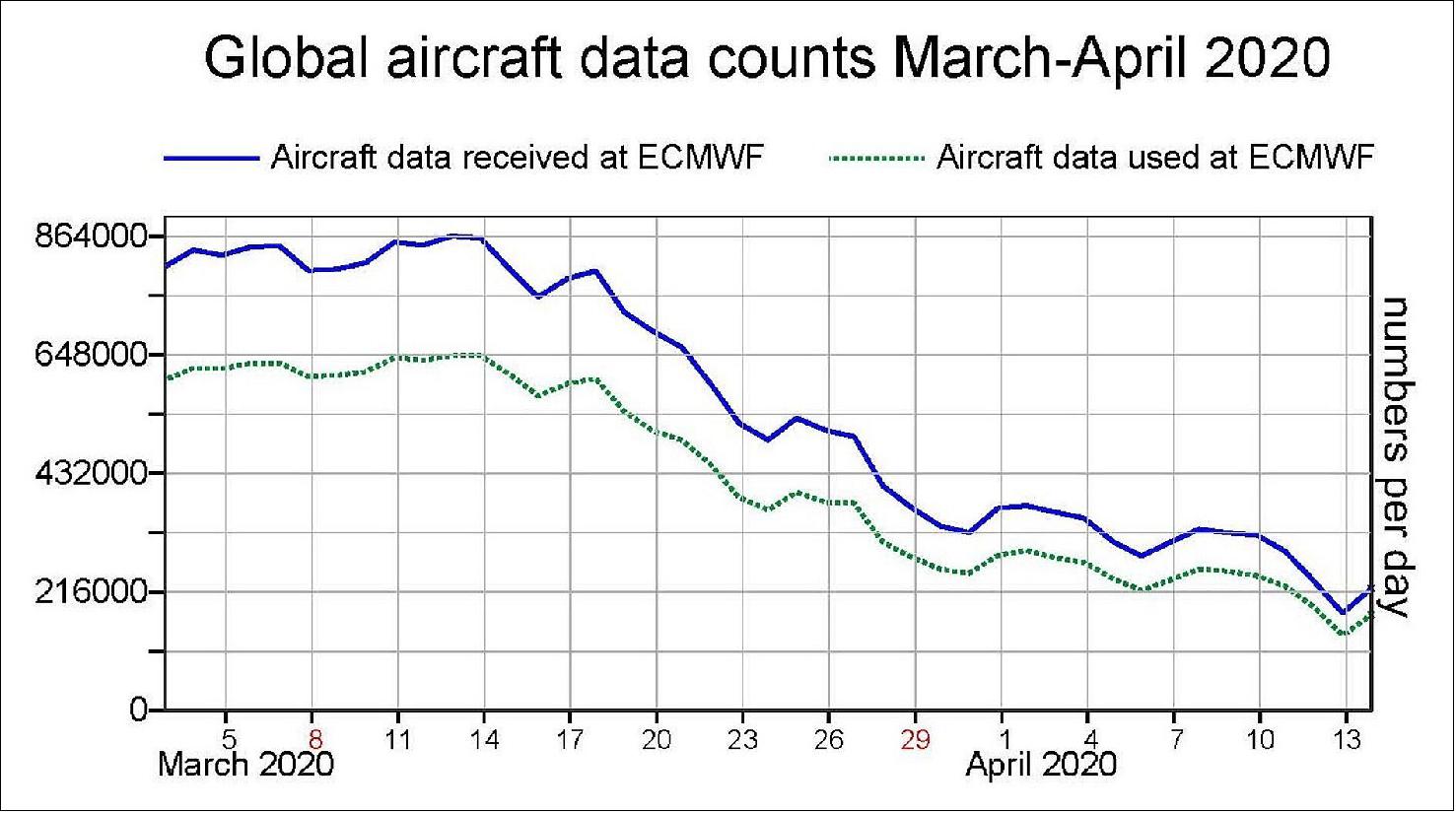
• April 21, 2020: We are all too aware that COVID-19 is a serious threat to health, is putting huge pressure on healthcare systems and it could leave the global economy struggling for years to come. With lockdown measures in force across the globe, the pandemic is also affecting aspects of everyday life that may not be so obvious. The drop in commercial flights, for example, has led to fewer measurements for weather forecasts, but fortunately, ESA's Aeolus satellite mission is helping to fill the gap. 38)

- The COVID-19 pandemic was affecting countless industries across the globe. The travel industry was one of the hardest hit with an unprecedented decline in air traffic. Under normal circumstances, commercial aircraft equipped with sensors supply measurements of temperature, wind speed and wind direction in the atmosphere below 13 km. Without these measurements, the weather forecasts we took for granted everyday would have been much less accurate.
- Florian Pappenberger from the European Centre for Medium-Range Weather Forecasts (ECMWF) in the UK, said, "Measurements from aircraft across Europe have dropped by 90%. We are still able to forecast the weather reliably several days ahead, but due to COVID-19 we may have temporarily lost as much skill as we gained in several years of scientific development."
- The weather is a product of chaotic processes and even very small changes in the atmosphere can lead to completely different weather conditions in the long term. This is why it is important to have the best understanding possible of the current state of the atmosphere before starting to calculate what the weather will be like days and weeks ahead.
![Figure 26: Impact of aircraft and Aeolus data in ECMWF forecasts before and after the COVID-19-related reduction in air traffic. Forecast Sensitivity to Observation Influence (FSOI) measures how various observing systems influence the ECMWF numerical weather forecast quality. The figure shows the total impact [Mega J/kg] of aircraft data and Aeolus data for two weeks before and after the reduction in aircraft data owing to COVID-19. The impact of Aeolus has increased by 23% (image credit: ECMWF)](https://eoportal.org/ftp/satellite-missions/a/Aeolus_260422/Aeolus_Auto37.jpeg)
- ESA's Aeolus mission was built to demonstrate how new spaceborne technology could profile Earth's winds to understand how wind, pressure, temperature and humidity are interlinked – contributing to climate research and to forecasting the weather.
- It worked by emitting short, powerful pulses of ultraviolet light from a laser and measured the Doppler shift from the very small amount of light that was scattered back to the instrument from these molecules and particles to deliver vertical profiles that show the horizontal speed of the world's winds in the lowermost 30 km of the atmosphere.
- Aeolus has not only proved successful as a technology demonstrator and of value to science, but has surpassed expectations – and now meteorologists are already using its data operationally to improve weather forecasts.
- Lars Isaksen from ECMWF, said, "Satellite data provide a lot of information on temperature and humidity fields, but less on wind fields. In January 2020, ECMWF started using wind information from the Aeolus satellite and we can now use these data to partly fill the gap caused by having fewer measurements from aircraft."
- ESA's Jonas von Bismarck added, "The technology that Aeolus carries is exceptional and certainly proving its worth. We were all thrilled when ECMWF started using its data for weather forecasting, but we never expected a situation that's been brought about by COVID-19 – and we now see the mission playing an important role during this awful crisis."
- Dr Isaksen added, "While Aeolus is certainly helping to fill the gap, we are also releasing more radiosondes to help maintain the reliability of the weather forecasts during the crisis."
- Dr Isaksen added, "While Aeolus is certainly helping to fill the gap, we are also releasing more radiosondes to help maintain the reliability of the weather forecasts during the crisis."
• January 10, 2020: ESA's Aeolus satellite has been returning profiles of Earth's winds since 3 September 2018, just after it was launched – and after months of careful testing these measurements are considered so good that the ECMWF (European Centre for Medium-Range Weather Forecasts) is now using them in their forecasts. 39)
- The decision to include new measurements in weather forecasts is never taken lightly; it takes a lot of work to understand the data properly and ensure that they are of good quality.
- It was extremely unusual for a completely new type of satellite data to be ready for practical use in forecasts so soon after launch. Nevertheless, this extraordinary satellite has surpassed expectations and, as of today, Aeolus improved our forecasts, from one-day forecasts to those forecasting the weather more than a week ahead.
- Boasting a number of ‘firsts', Aeolus was the first satellite mission to provide profiles of Earth's wind in cloud-free air globally, carried the first instrument of its kind, and used a novel approach to measuring the wind from space.
- Its novel Doppler wind lidar instrument, which comprised a powerful laser, a large telescope and a very sensitive receiver, emitted short, powerful pulses of ultraviolet light down into the atmosphere and measured the shifts in wavelength of the laser light scattering off molecules and particles moving in the wind.
- Aeolus was designed to fill the lack of wind-profile measurements in the weather observation network and, therefore, to play a key role in increasing our understanding of the workings of the atmosphere, contributed to climate research and also improved weather forecasting.
- Before forecasters could assimilate Aeolus' data into weather forecasts, some serious testing and quality checks had to be done.
- ESA's Aeolus mission manager, Tommaso Parrinello, said, "During the first year of Aeolus' life in orbit, ESA and the Aeolus Data Innovation Science Cluster team worked hard to characterize and calibrate this ground-breaking satellite instrument and understand exactly how it was working in space."
- "They were helped by scientists across the world who compared wind measurements taken from the ground and from aircraft with those from Aeolus."
- "While we did find that we had to switch to the instrument's second laser transmitter to boost power, the mission is proving to be an excellent way of measuring the wind – so much so that we now see data being assimilated into forecasts, which we are absolutely thrilled about."
- Michael Rennie from the ECMWF explains, "We had to assess the impact that Aeolus would have on the weather forecasts before deciding to ingest them operationally – and this involved checking the data quality with the forecast and other observations, and running a host of experiments to see if Aeolus consistently improves the forecasts, and by how much."
- "Our experiments showed that, indeed, Aeolus had a positive impact, and this makes a big difference, particularly over parts of the world where there is a lack of other wind observations."
- "The biggest improvement is in tropical regions and in the southern hemisphere. We also see that measurements from Aeolus are among the most important instruments in space for forecast quality, which is hugely impressive considering that Aeolus actually gives us less than 1% of the measurements we use in daily forecasts."
- With the operational assimilation of Aeolus data at ECMWF, a major milestone for this novel mission has been reached. Other operational weather centers across the world were also seeing positive impact of Aeolus observations and plan to start assimilating data during the course of 2020.
- This mission milestone also paved the way for a possible future fleet of operational Doppler wind lidar satellites in space.
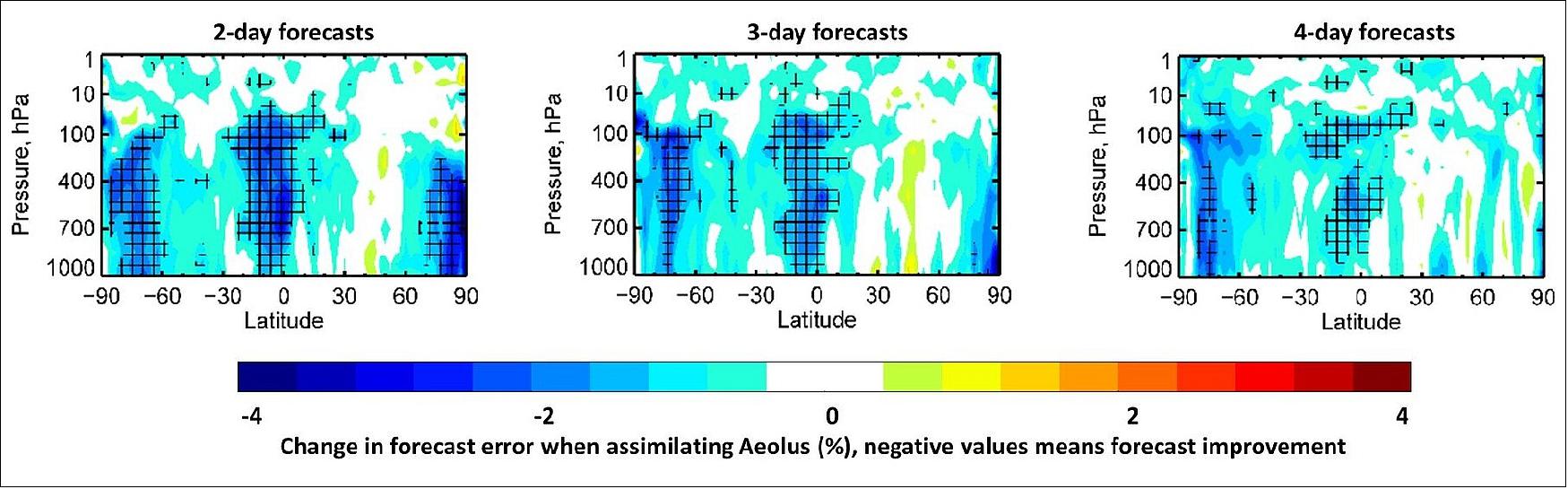
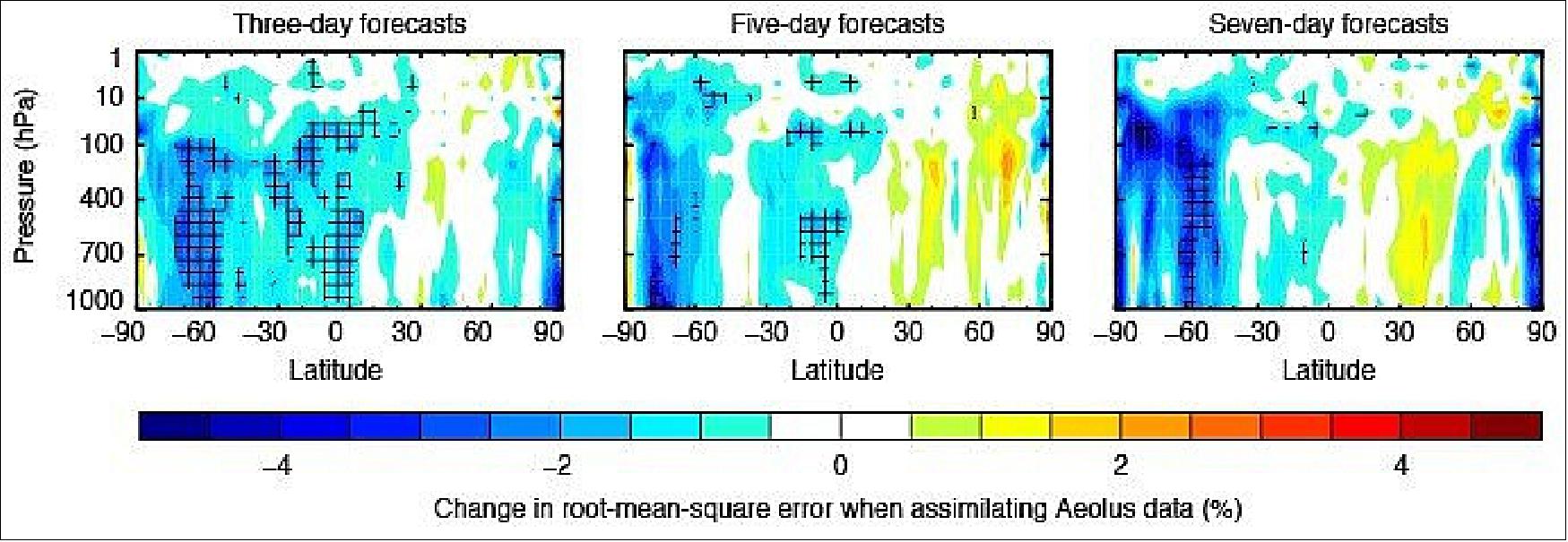
• November 12, 2019: Tests carried out showed that new wind profile observations from ESA's Aeolus satellite significantly improved weather forecasts – particularly in the southern hemisphere and the tropics. 41)
- Carrying breakthrough laser technology, the Aeolus satellite – an ESA Earth Explorer mission – was launched in August 2018. It was the first satellite mission to provide profiles of Earth's winds globally.
- Unexpectedly, Aeolus observations turned out to have small ‘biases' in their data. As is normal for any satellite mission, successfully correcting these biases was an important part of optimizing the use of the satellite's observations.
- During the course of 2018, scientists at the European Centre for Medium-Range Weather Forecasts (ECMWF), in close collaboration with ESA, the German Aerospace Center (DLR), the software company DoRIT, the Royal Netherlands Meteorological Institute (KNMI) and Météo-France have been making big strides in understanding these inconsistencies.
- Tests carried out at ECMWF show that when Aeolus data were combined with short-range forecast information in a process called data assimilation, the short-range forecasts used are improved.
- The data have been found to be significantly closer to other wind, temperature and humidity observations than when Aeolus data are not assimilated – especially in the southern hemisphere and the tropics which are less covered by conventional observations in the northern hemisphere.
- Tommaso Parrinello, Aeolus Mission Manager at ESA, comments, "I am impressed with the achievements of the ESA-funded Aeolus team of engineers. With Aeolus's first functioning Doppler wind lidar in space, complex biases can appear but I am extremely pleased that the team has found a physically based correction to solve them."
- "As early as 15 months after launch, ECMWF and several other numerical weather prediction centers have shown large improvements in weather forecasts when Aeolus data is assimilated in test experiments. This is a success story thanks to the close collaboration between ESA, ECMWF, other weather prediction centers and all scientists involved."
- ECMWF, in collaboration with other scientists, has shown that Aeolus biases are closely correlated with small variations in the temperature distribution across the large mirror used in the Aeolus instrument's telescope.
- ECMWF's Mike Rennie adds, "We have been able to identify and correct some of these biases successfully. This finding will enable us to refine our bias correction, since those temperatures are measured in space and available in real time."
- "Aeolus engineers and scientists are now investigating why such temperature differences cause wind biases and if the mirror temperatures can be controlled better."
- ECMWF continued to work closely with ESA on ways to minimize such biases in Aeolus data, which could be applied to future follow-on missions.
• October 2019: Aeolus hosts ALADIN, the first spaceborne DWL (Doppler Wind Lidar) world-wide. The satellite provided consistent and positive results and it is expected that first public data will be released in Q1 2020. 42)
- The Aeolus primary mission objective was to demonstrate the DWL technique for measuring wind profiles from space, intended for operational assimilation in Numerical Weather Prediction (NWP) models.
- The wind observations were used to advance atmospheric dynamics research, process studies and for evaluation of climate models. Mission spin-off products were profiles of cloud and aerosol optical properties. The Aeolus mission selection was motivated by the need for more abundant direct wind profile measurements in the World Meteorological Organization (WMO) Global Observing System (GOS). Aeolus winds contributed to mitigate the current wind observation deficit. Meteorological Centers world-wide prepared to ingest Aeolus winds near-real-time in their operational weather models, as soon as the data was of sufficiently good quality. This was expected towards the end of 2019.
- The main product from Aeolus was the HLOS (Horizontally projected Line-Of-Sight) wind profile observations (approximately zonally oriented) from the surface up to 25-30 km altitude. The atmospheric backscattered signal for the individual laser pulses were averaged on-board to yield ~3 km measurements along-track. These measurements were further averaged on-ground to observations, representing horizontal scales up to ~88 km. The vertical resolution of the winds varies from 0.25 to 2 km, and was optimized along the orbit according to the climatological region. The HLOS wind observation random error (precision) requirement was 1 m/s in the PBL (Planetary Boundary Layer), 2.5 m/s in the free troposphere and 3-5 m/s in the stratosphere. The bias (systematic error) requirement is 0.7 m/s.
- The Aeolus Level 2A product contained profiles of particle and molecular parallel-polarized backscatter and extinction coefficients, scattering ratios and backscatter-to-extinction ratios. From these parameters it was possible to derive particle layer height, multi-layer cloud/aerosol stratification, cloud/aerosol optical depths and some information on cloud/aerosol type. Other products were developed during the mission operational phase.
- The Aeolus data has been available to its CAL/VAL teams (including NWP centers) world-wide since December 2018, and it was publicly released from the ESA Aeolus Data Dissemination Facility and via EUMETCAST as soon as the initial product CAL/VAL was concluded. The first pubic data release (wind product) was expected in Q1 2020.
Aeolus Satellite in Orbit Experience/Status
- After initial acquisition of the correct orbit, the In-Situ Cleaning System (ICS) which provided a low pressure of oxygen for the high power laser emission path of the instrument was initiated. The oxygen provided by the ICS was needed in order to prevent laser-induced contamination from occurring on the laser optics.
- After this was successfully achieved, the laser was switched on in discrete, increasing energy steps, with the LBM (Laser Beam Monitoring) mode of the instrument applied in order to ensure that the laser fluence was within the margins necessary to avoid laser-induced damage to the instrument. The laser was set to its full energy setting on the 3rd of September 2019. The initial UV energy was 65mJ (lower than the 80mJ for the same set-point achieved in ground tests).
- The next stages were to perform the adjustment of the ALADIN telescope focus on the reception path of the instrument and then to calibrate the ALADIN spectrometers. ALADIN has two sequential spectrometers which are designed to measure the Doppler shift from the backscattered signal return due to the wind.
The Mie spectrometer, used to measure the backscatter returns from particles and aerosols, is based upon a Fizeau spectrometer, which images a fringe whose position on the CCD is dependent on the frequency of the returned signal.
The Rayleigh spectrometer, is based upon two Fabry-Perot etalons with slightly different path lengths which act as two filters slightly displaced in frequency space.
The difference in the signals transmitted by the two filters gives the frequency shift of the backscattered signal returns, broadened by Brownian motion, from the molecules in the atmosphere. These adjustments and calibrations were all successfully executed and placed the ALADIN instrument in a position to deliver the first wind measurements through the Earth's atmosphere from space. The laser UV energy for the first year of the mission is shown in Figure 30.
As can be observed from the figure, the first laser transmitter (FM-A) operated for a duration of around 9 months, accumulating just over 1 billion shots. There was a monotonic decrease in the laser energy which resulted in several energy adjustments being made. Investigations showed that the energy decreased was due to a misalignment of the master oscillator leading to a decrease in the energy supplied to the amplifiers. Furthermore, at the beginning of 2019, there was an reboot anomaly on the GPS unit on the satellite which led to the ALADIN instrument being switched off for around 1 month.
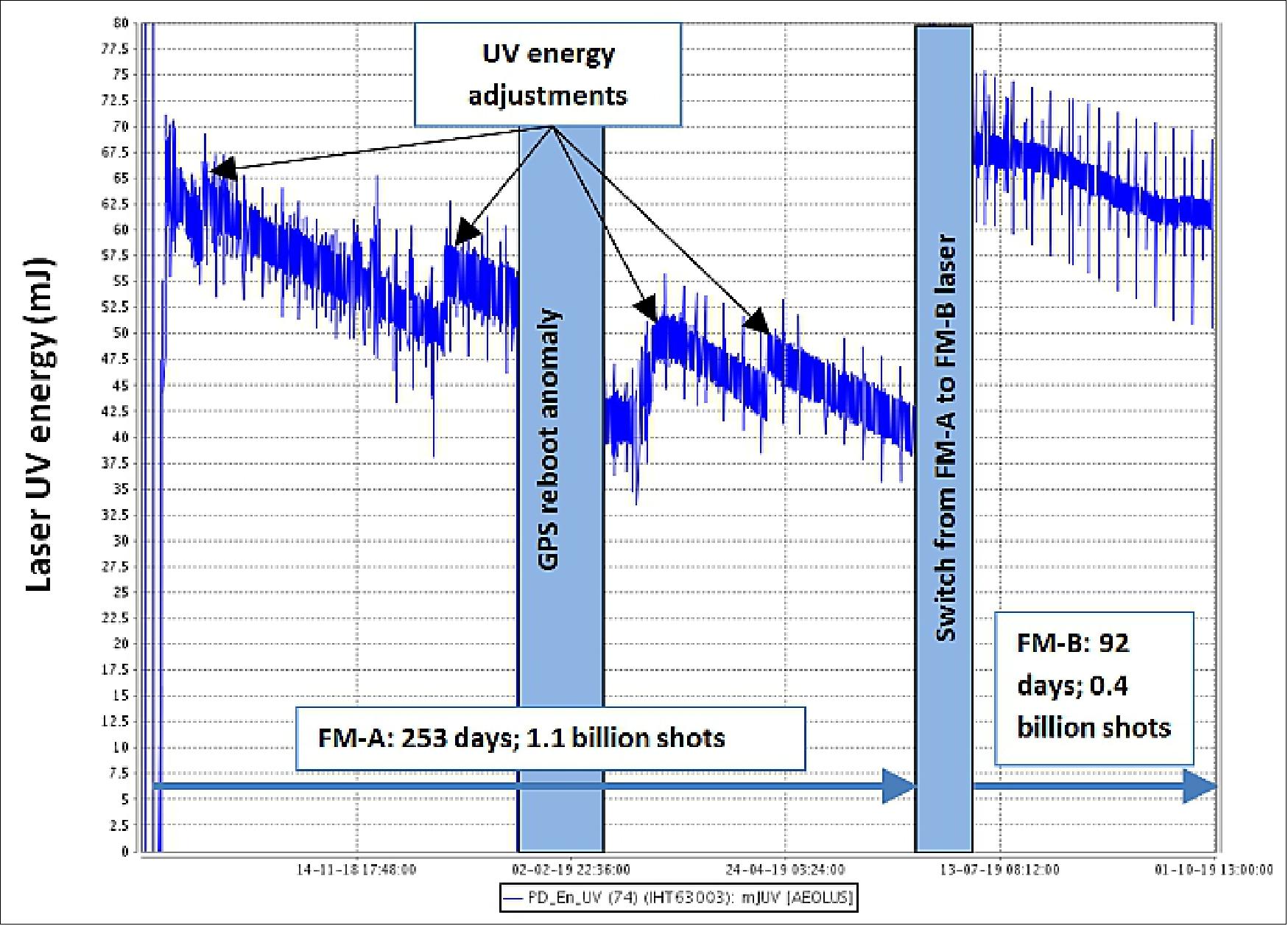
- In June of 2019, it was decided to switch to the second flight laser (FM-B) which was not showing the same energy decrease as the first, and was currently stabilizing to a level around 60mJ which was adjudged sufficient by the science teams.
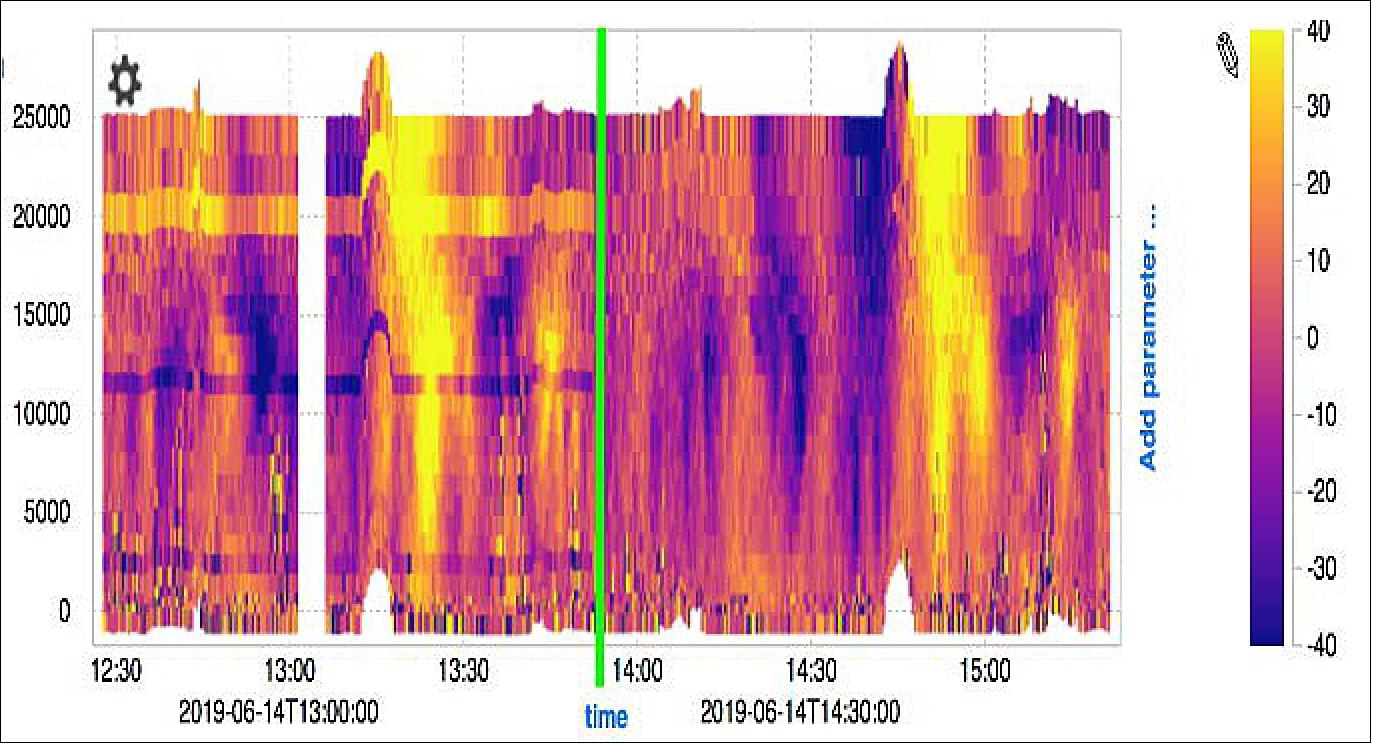
- Quite early in the mission, it was noticed that there was a significant bias introduced into the final wind product data which was related to specific layers within the 24 layers that Aeolus measured through the atmosphere. It was also noticed that the number of layers that were impacted was growing. Investigations led to the discovery that there were "hot" pixels i.e. pixels with an elevated signal level, appearing on the accumulation CCDs for both the Mie and Rayleigh spectrometers. Although the investigations continued in to the root cause of these, an in-orbit fix was found whereby pseudo dark current measurements were made regularly by setting the altitude bins below ground level.
- The impact of performing this pseudo dark current calibration can be clearly seen in Figure 31. The bias introduced by the "hot" pixels can be seen as streaks in discrete altitude bins on the left hand side of the figure. The correction was introduced in mid June (shown by the green line in the figure). The streaks have been completely eliminated by the introduction of the in-orbit correction.
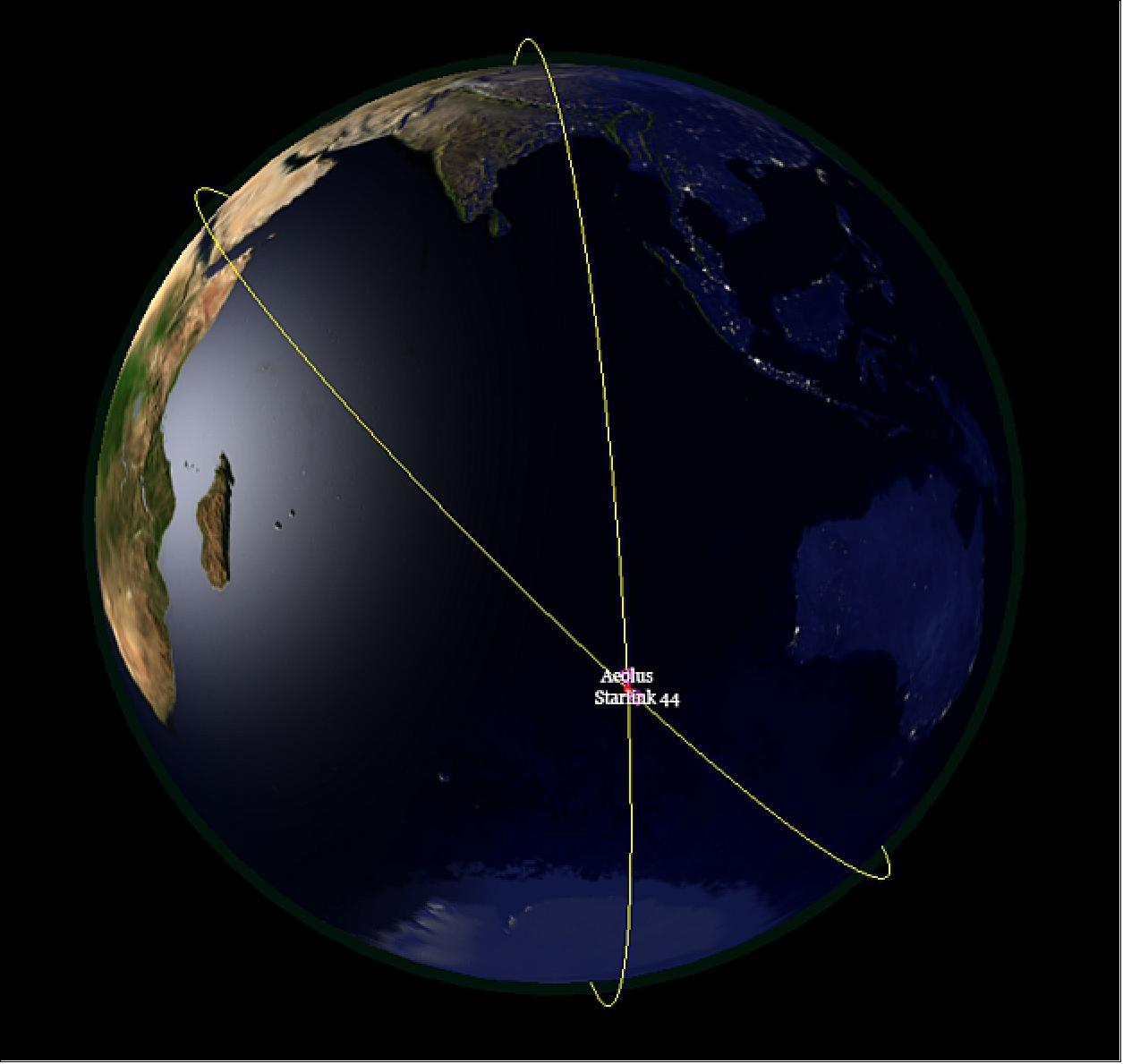
- In general terms, apart from the reboot anomaly with the GPS unit, which has also occurred on other satellites that use the similar units, the spacecraft performed very well. There have been a small number of reconfigurations of the star-tracker and on 2 September, there was an avoidance maneuver which was successfully undertaken by Aeolus in order to avoid the Starlink 44 satellite. Apart from these, there were no major issues to report with any of the platform subsystems and units to date and there was sufficient fuel and oxygen to complete the mission lifetime of three years.
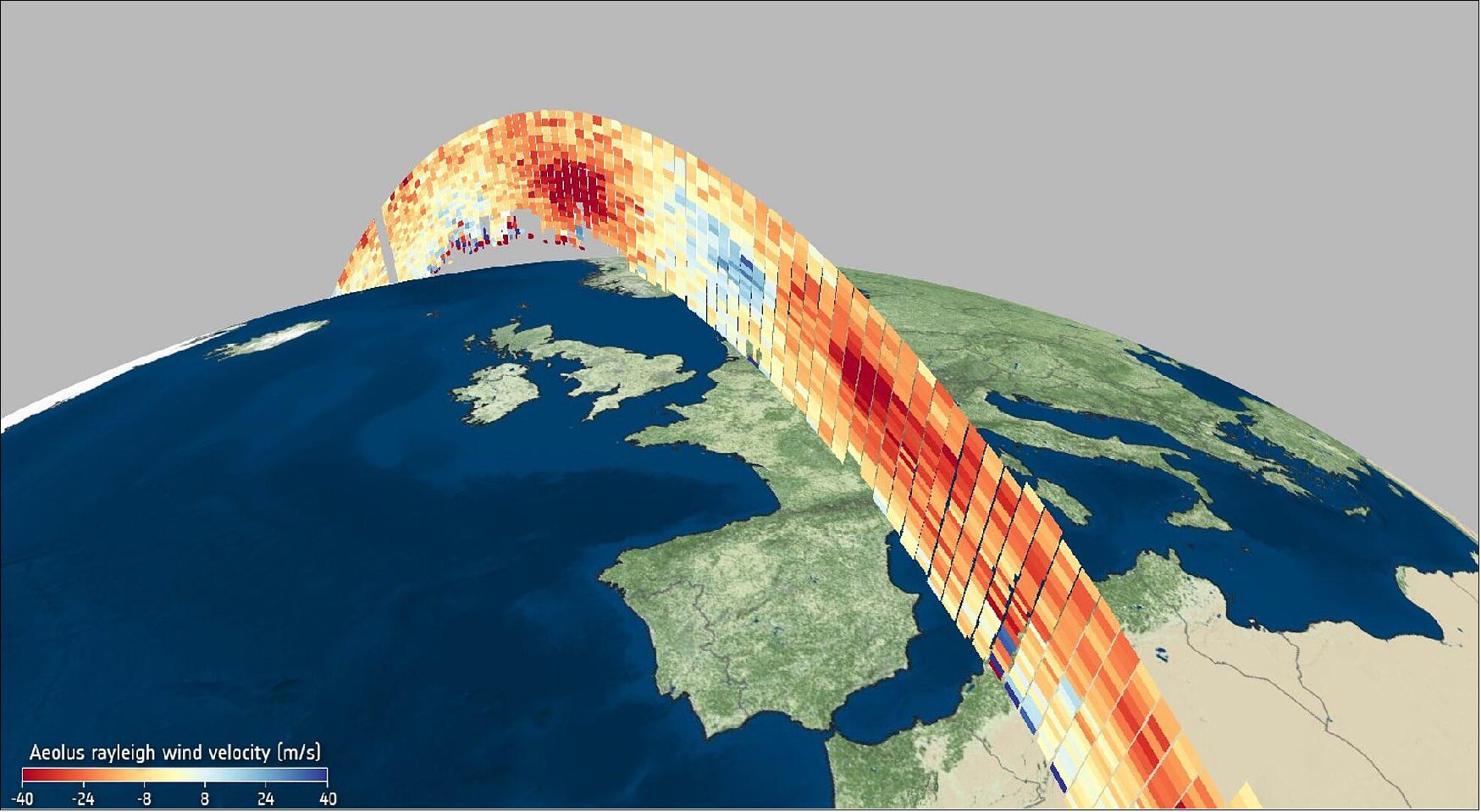
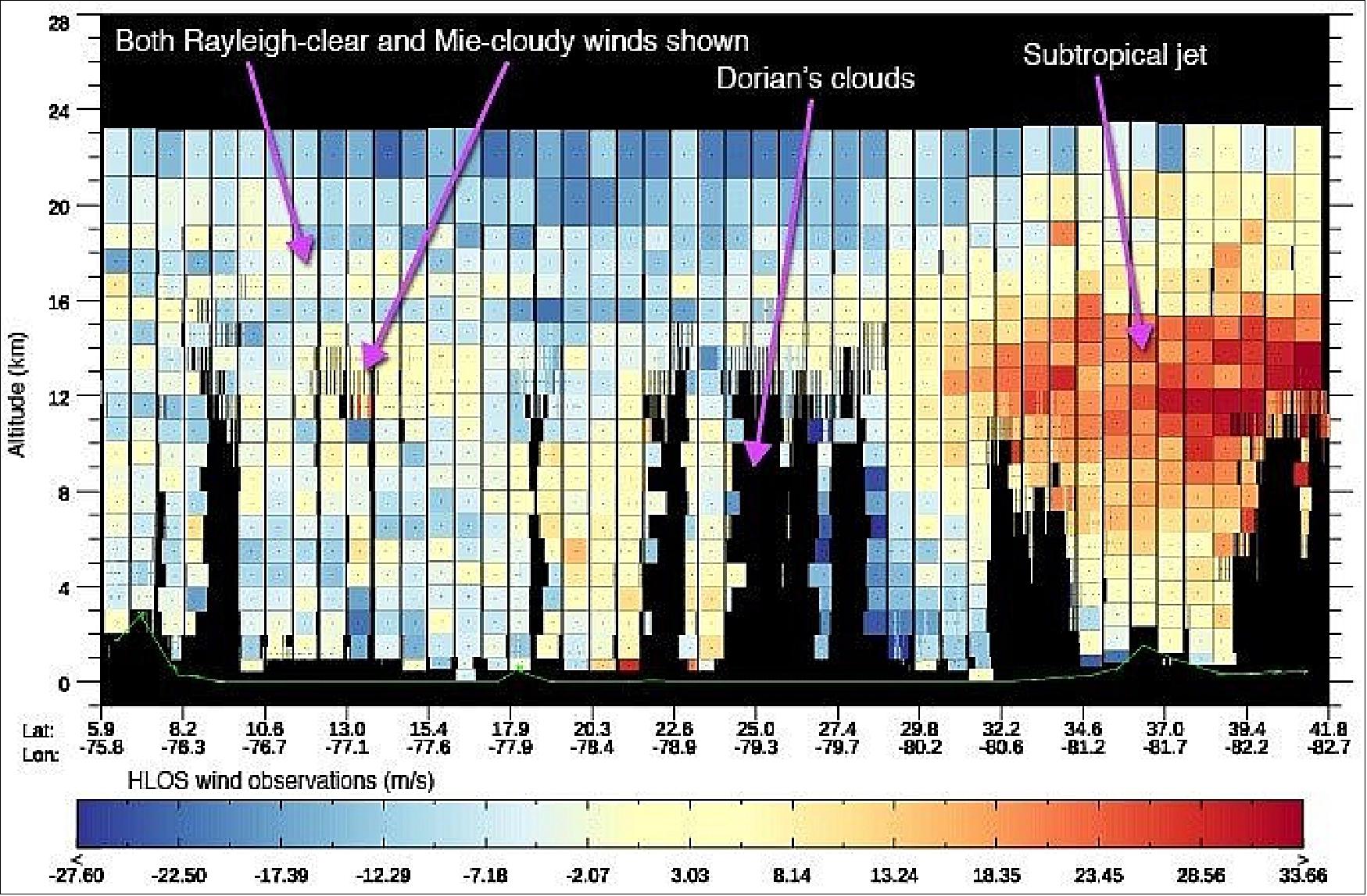
- Aeolus first results: The initial assessment of the Aeolus primary product, the L2B wind profile observations, has been done by the partners of the Aeolus Data Innovation and Science Cluster (DISC). ECMWF, KNMI and MétéoFrance have developed the Aeolus L2B processor and processing facility, which includes product quality monitoring using the ECMWF weather model. ECMWF was running the operational L2B product facility as part of the Aeolus ground segment. The Aeolus processing facility worked extremely well from the start of the mission, allowing for good quality L2B winds being available from the Payload Data Ground Segment already 2 days after the laser switch-on. The Aeolus Rayleigh and Mie wind observations for 12 September 2019 are shown in Figure 32.
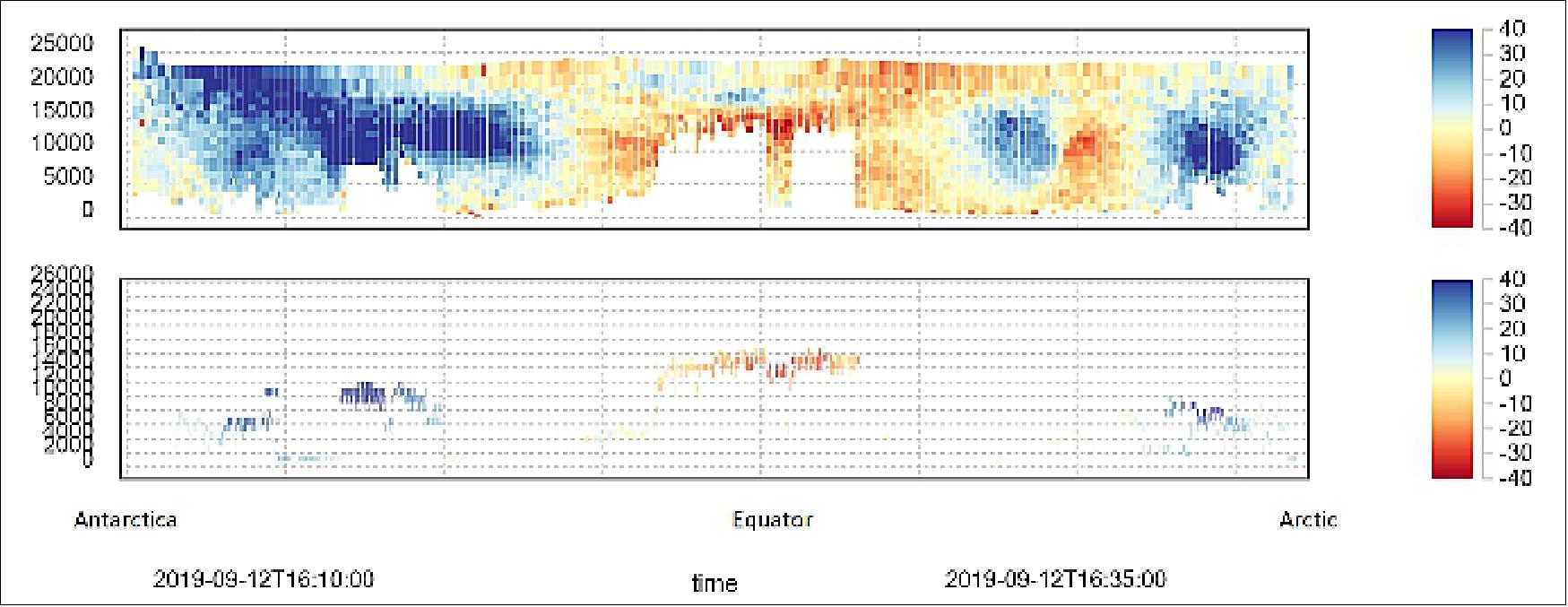
Aeolus measured in clear air, in and below optically thin clouds, and down to and on top of optically thick clouds. Areas below thick clouds are shown in white. Blue colors indicate Westerly winds and red colors Easterly winds in m/s. The lower part of the stratospheric jet around Antarctica can be seen, and is connected with the tropospheric polar jet and the subtropical jet in the Southern Hemisphere. On the Northern hemisphere, the subtropical jet and polar jet stream can be seen in the troposphere. The tropical Easterly winds are also well visible (image credit: ESA)
- Results from the first data quality assessment done by ECMWF as part of the DISC team and Aeolus CAL/VAL teams, comparing Aeolus winds with NWP models, ground-based and airborne observations world-wide, were very consistent and positive. They showed that the Aeolus wind random errors are compliant to the mission requirements in the free troposphere for the Mie channel for laser output energies above about 65 mJ, and slightly above for the Rayleigh channel. However, positive NWP impact has shown to be larger for the Rayleigh winds in most cases due to the uniqueness of the data and their large vertical coverage. The assessment has also shown that the bias requirements can be expected to be met after further optimization of the instrument calibration and data processing.
- First NWP impact experiments by leading meteorological centers world-wide show positive impact of the Aeolus observations particularly in the tropical troposphere and southern hemisphere where direct wind observations are sparse. The impact was comparable to the impact from other satellite-based observations which have been assimilated for many years and have much larger data volumes. This was very impressive, considering that the Aeolus observations contribute with less than 1% of the total number of observations used by forecast models. This demonstrates the great potential of the Doppler Wind Lidar technology for operational meteorological missions. Further results from the Aeolus CAL/VAL teams and NWP centers assimilating Aeolus data will be shown at the next Aeolus workshop in March 2020.
Aeolus Lessons Learned
- As part of the exercise for preparing for future lidar missions, an extensive lessons learned activity has been conducted on the Aeolus satellite and the ALADIN instrument in particular. The main lessons learned are summarized below:
a) The conductance of thermal interfaces of highly dissipative units coul change in-orbit. Any mechanical distortion arising from this change should be decoupled from alignment sensitive items.
b) Low pressure reduces the laser damage threshold of optics. Use non-porous optical coatings. Ensure that you have a margin of at least x2 for the laser induced damage threshold.
c) Laser induced contamination results when there is a non-oxidizing environment. Low pressures of oxygen are successful in avoiding these highly absorbing deposits.
d) Be careful when performing tests in sub pupil on large telescopes on instruments with a restricted field of view as this can add uncertainties in the radiometric budgets of the instrument.
e) For future missions, improve the accuracy and acquisition rates for telemetries which are key to understanding and controlling the performance of high power lasers.
• September 3, 2019: For the first time, ESA has performed a 'collision avoidance maneuver' to protect one of its spacecraft from colliding with a satellite in a large constellation. 43)
- Constellations are fleets of hundreds up to thousands of spacecraft working together in orbit. They are expected to become a defining part of Earth's space environment in the next few years.
- As the number of satellites in space dramatically increases, close approaches between two operated spacecraft will occur more frequently. Compared with such 'conjunctions' with space debris – non-functional objects including dead satellites and fragments from past collisions – these require coordination efforts, to avoid conflicting actions.
- Today, the avoidance process between two operational satellites is largely manual and ad hoc – and will no longer be practical as the number of alerts rises with the increase in spaceflight.
- "This example shows that in the absence of traffic rules and communication protocols, collision avoidance depends entirely on the pragmatism of the operators involved," explains Holger Krag, Head of Space Safety at ESA. — "Today, this negotiation is done through exchanging emails - an archaic process that is no longer viable as increasing numbers of satellites in space mean more space traffic."
- ESA is proposing an automated risk estimation and mitigation initiative as part of its space safety activities. This will provide and demonstrate the types of technology needed to automate the collision avoidance process, allowing machine generated, coordinated and conflict-free maneuver decisions to speed up the entire process – something desperately needed to protect vital space infrastructure in the years to come.
What Happened?
- Data is constantly being issued by the 18th Space Control Squadron of the US Air Force, who monitor objects orbiting in Earth's skies, providing information to operators about any potential close approach.
- With this data, ESA and others are able to calculate the probability of collision between their spacecraft and all other artificial objects in orbit.
- About a week before, the US data suggested a potential ‘conjunction' at 11:02 UTC on Monday, 2 September, between ESA's Aeolus satellite and Starlink44 – one of the first 60 satellites recently launched in SpaceX's mega constellation, planned to be a 12 000 strong fleet by mid-2020.
- Experts in ESA's Space Debris Office worked to calculate the collision probability, combining information on the expected miss distance, conjunction geometry and uncertainties in orbit information.
- As days passed, the probability of collision continued to increase, and by Wednesday 28 August the team decided to reach out to Starlink to discuss their options. Within a day, the Starlink team informed ESA that they had no plan to take action at this point.
- ESA's threshold for conducting an avoidance maneuver is a collision probability of more than 1 in 10 000, which was reached for the first time on Thursday evening (29 August).
- An avoidance maneuver was prepared which would increase Aeolus' altitude by 350 m, ensuring it would comfortably pass over the other satellite, and the team continued to monitor the situation.
- On Sunday (1 September), as the probability continued to increase, the final decision was made to implement the maneuver, and the commands were sent to the spacecraft from ESA's mission control center in Darmstadt, Germany.
- At this moment, chances of collision were around 1 in 1000, 10 times higher than the threshold.
- On Monday morning (2 September), the commands triggered a series of thruster burns at 10:14, 10:17 and 10:18 UTC, half an orbit before the potential collision.
- About half an hour after the conjunction was predicted, Aeolus contacted home as expected. This was the first reassurance that the maneuver was correctly executed and the satellite was OK.
- Since then, teams on the ground have continued to receive scientific data from the spacecraft, meaning operations are back to normal science-gathering mode.
- Contact with Starlink early in the process allowed ESA to take conflict-free action later, knowing the second spacecraft would remain where models expected it to be.
New Space
- Since the first satellite launch in 1957, more than 5500 launches have lifted over 9000 satellites into space. Of these, only about 2000 are currently functioning, which explains why 90% of ESA's avoidance maneuvers are the result of derelict and uncontrollable ‘space debris'.
- In the years to come, constellations of thousands of satellites are set to change the space environment, vastly increasing the number of active, operational spacecraft in orbit.
- This new technology brings enormous benefits to people on Earth, including global internet access and precise location services, but constellations also bring with them challenges in creating a safe and sustainable space environment.
Space Rules
- "No one was at fault here, but this example does show the urgent need for proper space traffic management, with clear communication protocols and more automation," explains Holger.
- "This is how air traffic control has worked for many decades, and now space operators need to get together to define automated maneuver coordination."
Autonomous Spaceflight
- As the number of satellites in orbit rapidly increases, today's 'manual' collision avoidance process will become impossible, and automated systems are becoming necessary to protect our space infrastructure.
- Collision avoidance maneuvers take a lot of time to prepare – from determining the future orbital positions of functioning spacecraft, to calculating the risk of collision and the many possible outcomes of different actions.
- ESA is preparing to automate this process using artificial intelligence, speeding up the processes of data crunching and risk analysis, from the initial warning of a potential conjunction to the satellite finally moving out of the way.
- Such use of space-based communication links can save precious time when sending maneuver commands at the last minute.
- Under its Space Safety activities, ESA plans to invest in technologies required to automatically process collision warnings, coordinate maneuvers with other operators and send the commands to spacecraft entirely automatically, ensuring the benefits of space can continue to be enjoyed for generations to come.
• July 23, 2019: ESA's Aeolus satellite, which carries the world's first space Doppler wind lidar, has been delivering high-quality global measurements of Earth's wind since it was launched almost a year ago. However, part of the instrument, the laser transmitter, has been slowly losing energy. As a result, ESA decided to switch over to the instrument's second laser – and the mission is now back on top form. 44)
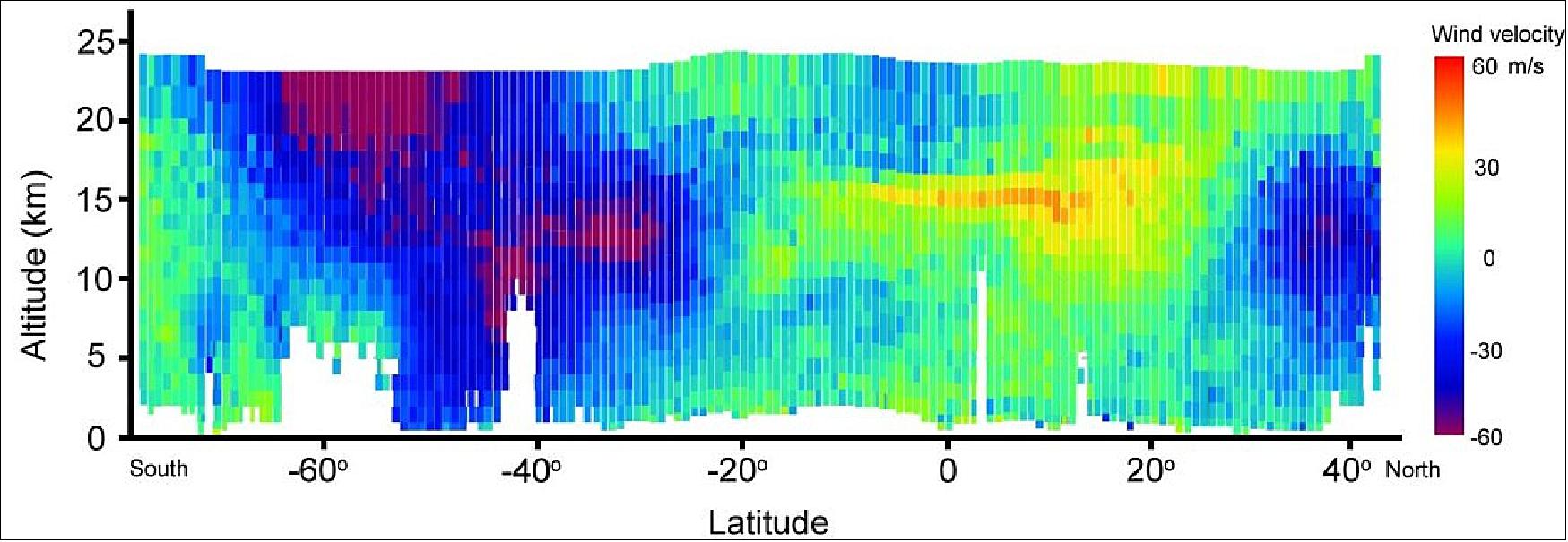
- Developing novel space technology is always a challenge, and despite the multitude of tests that are done in the development and build phases, engineers can never be absolutely certain that it will work in the environment of space.
- Aeolus is, without doubt, a pioneering satellite mission – it carries the first instrument of its kind and uses a completely new approach to measuring wind from space.
- The instrument, called Aladin, not only comprises the laser transmitters, but also one of the largest telescopes ESA has put into orbit and very sensitive receivers that measure the minute shifts in wavelength of light generated by the movement of molecules and particles in the atmosphere caused by the wind.
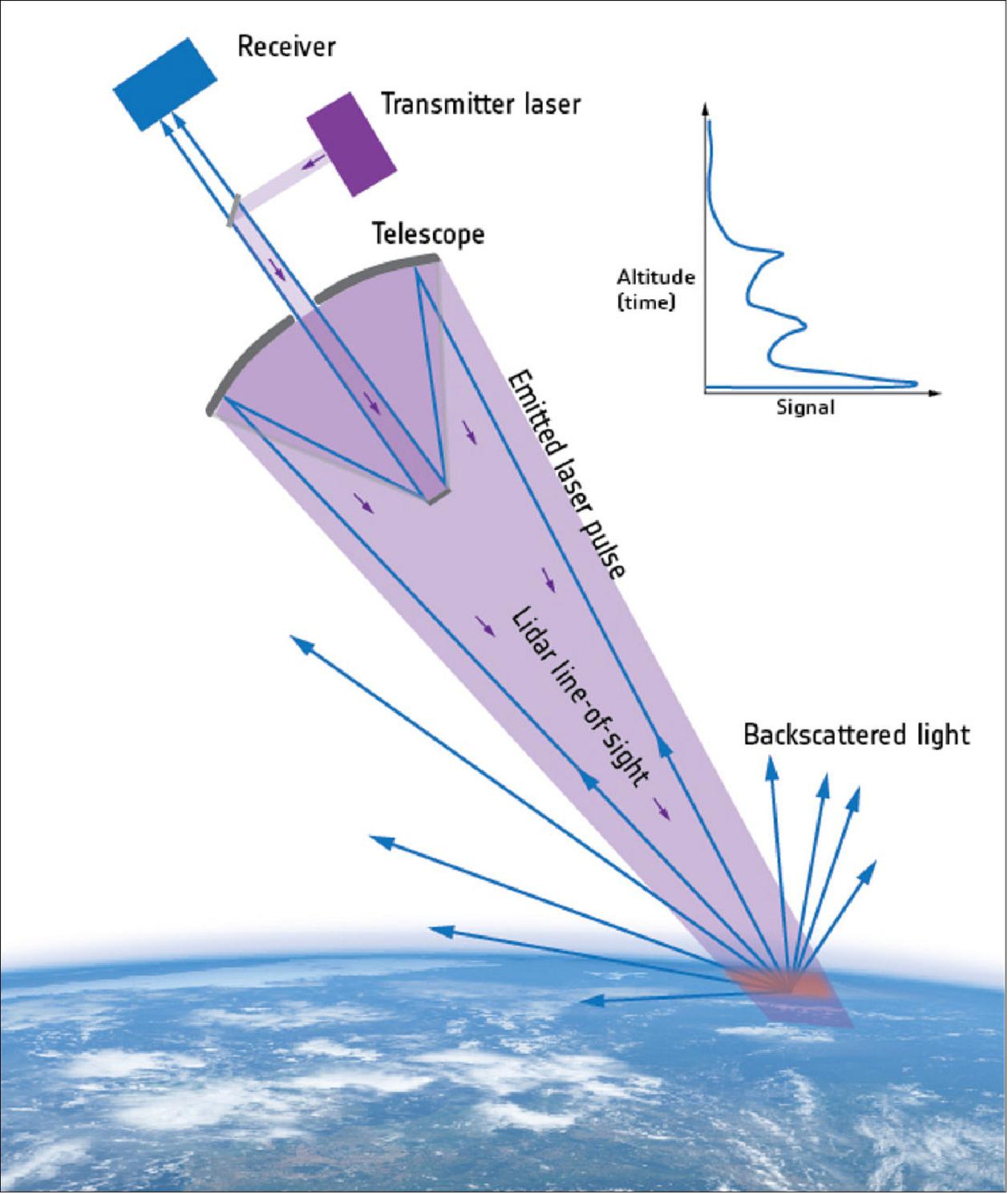
- Aladin, works by emitting short, powerful pulses of ultraviolet light from a laser and measures the Doppler shift from the very small amount of light that is scattered back to the instrument from these molecules and particles to deliver vertical profiles that show the speed of the world's winds in the lowermost 30 km of the atmosphere.
- While scientists and meteorology centers have been thrilled with the data produced by Aeolus, the first laser's energy was becoming a concern – and in June, energy levels dipped to the point that the quality of the wind data was set to be compromised.
- Tommaso Parrinello, ESA's Aeolus mission manager, said, "With the power from the first laser declining, we decided to turn it off and activate the second laser, which the instrument was equipped with to ensure we could address an issue such as this.
- "Switching to the second laser appears to have done the trick so we're back in business. And, we are confident that the instrument will remain in good shape for years to come."
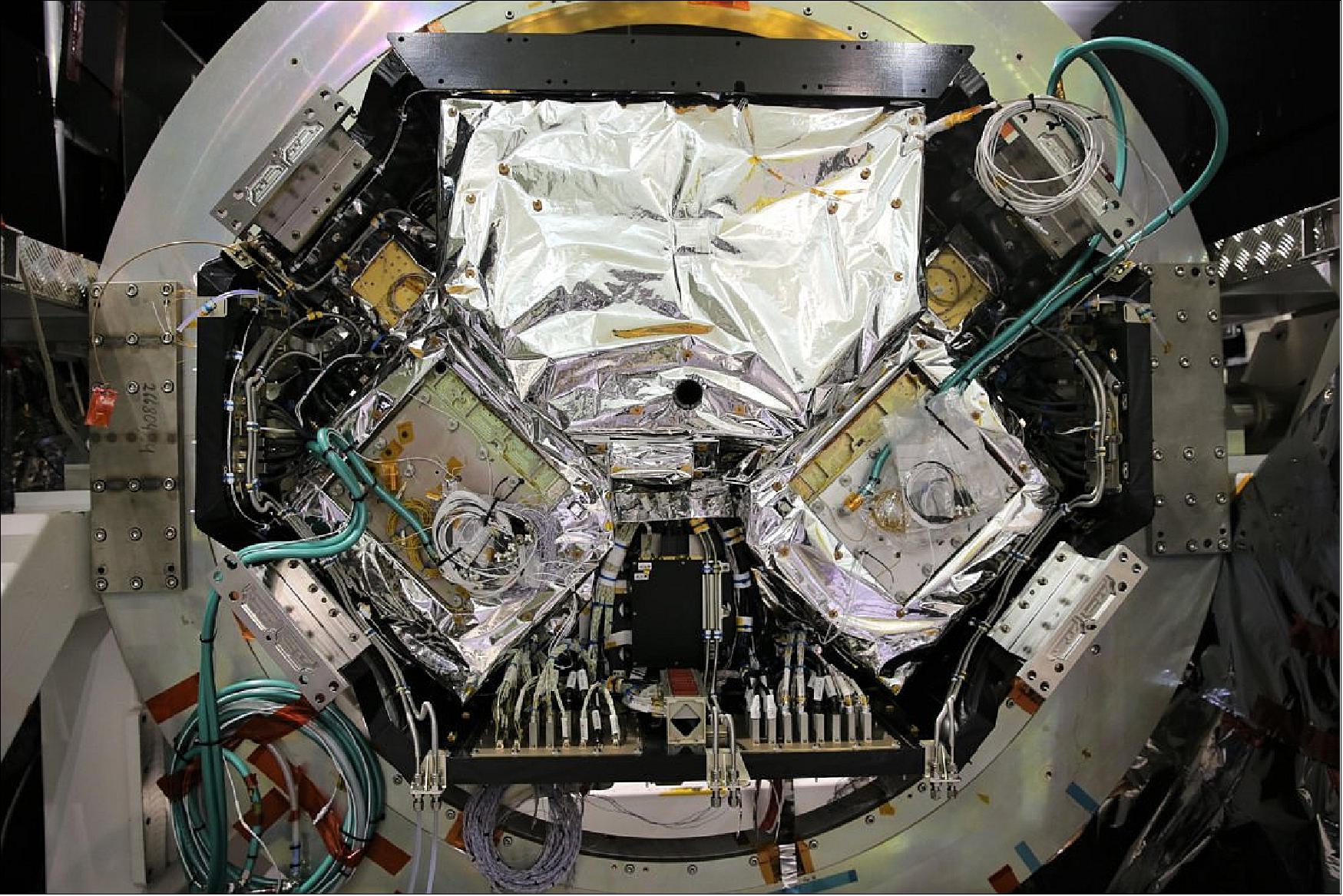
- Denny Wernham, ESA's Aeolus instrument manager, added, "The great news is that the second laser's energy is, so far, very stable, which is what we expected since this laser is actually better than the first. This is because we have more scope to adjust it in orbit to retain the performance needed.
- "I would like to stress that despite the first laser's drop in energy, it worked for nearly a year and provided a vital dataset for our stakeholders. It accumulated nearly one billion shots, which is a record for a high-power ultraviolet laser in space, and we can always go back to it if we need to later in the mission."
- The ECMWF (European Center for Medium Range Weather Forecasting) is also enthusiastic about the data now being delivered.
- Michael Rennie at ECMWF, said, "We were very happy to see the wind data after the switch, and given the fact that when Aeolus was using its first laser we could see that it can improve our weather forecasts off-line, we are expecting even better results with the new setup.
- "Towards the end of the year, we hope that we will be feeding data from Aeolus into our forecasts in real time."
- Anne Grete Straume, ESA's Aeolus mission scientist, added, "It is extremely good news for the mission and forecasters alike.
- "We are very much looking forward to seeing several weather-forecast impact assessments by European, American and Asian meteorological centers at a meeting with our community in September 2019.
- "These assessments compare the impact of Aeolus with the impact of measurements by other weather satellites and observations in the World Meteorological Organization Global Observing System.
- "Towards the end of 2019, further scientific studies will also start using Aeolus wind observations to learn more about the role of winds in the atmosphere–land–ocean system and how small and large-scale winds will alter as our climate changes."
• April 5, 2019: Assessing the accuracy of data being returned by completely new technology in space is a challenging task. But this is exactly what engineers and scientists have been dedicating their time to over the last months so that measurements of the world's winds being gathered by Aeolus can be fed confidently into weather forecast models. 45)
- Carrying breakthrough laser technology, the Aeolus satellite – an ESA Earth Explorer mission – was launched in August 2018. Its novel Aladin instrument, which comprises a powerful laser, a large telescope and a very sensitive receiver, measures the wind by emitting short, powerful pulses of ultraviolet light down into the atmosphere.
- It is the first satellite mission to provide profiles of Earth's wind globally. Its near-realtime observations will soon be made available to weather forecasters around the world. These observations are set to improve the accuracy of weather forecasts as well as advance our understanding of atmospheric dynamics and processes linked to climate variability.
- Before ESA can declare that the data good enough to be included in forecasts, the data have to be carefully calibrated and validated. Part of this process has involved gathering measurements of wind, aerosols and clouds from the ground, aircraft and from other satellites to compare them with measurements being delivered by Aeolus.
- Also, in preparation for ingesting the data into their forecasts, a number of weather forecasting centers around the world have started to compare the Aeolus winds with their models.
- So, after several months of calibration and validation exercises, around 100 scientists and engineers from universities, research institutes and weather centers in Europe, the US, Canada, Japan and China gathered recently at ESA's center of Earth observation in Frascati, Italy to review the latest results from the Aeolus data investigations.
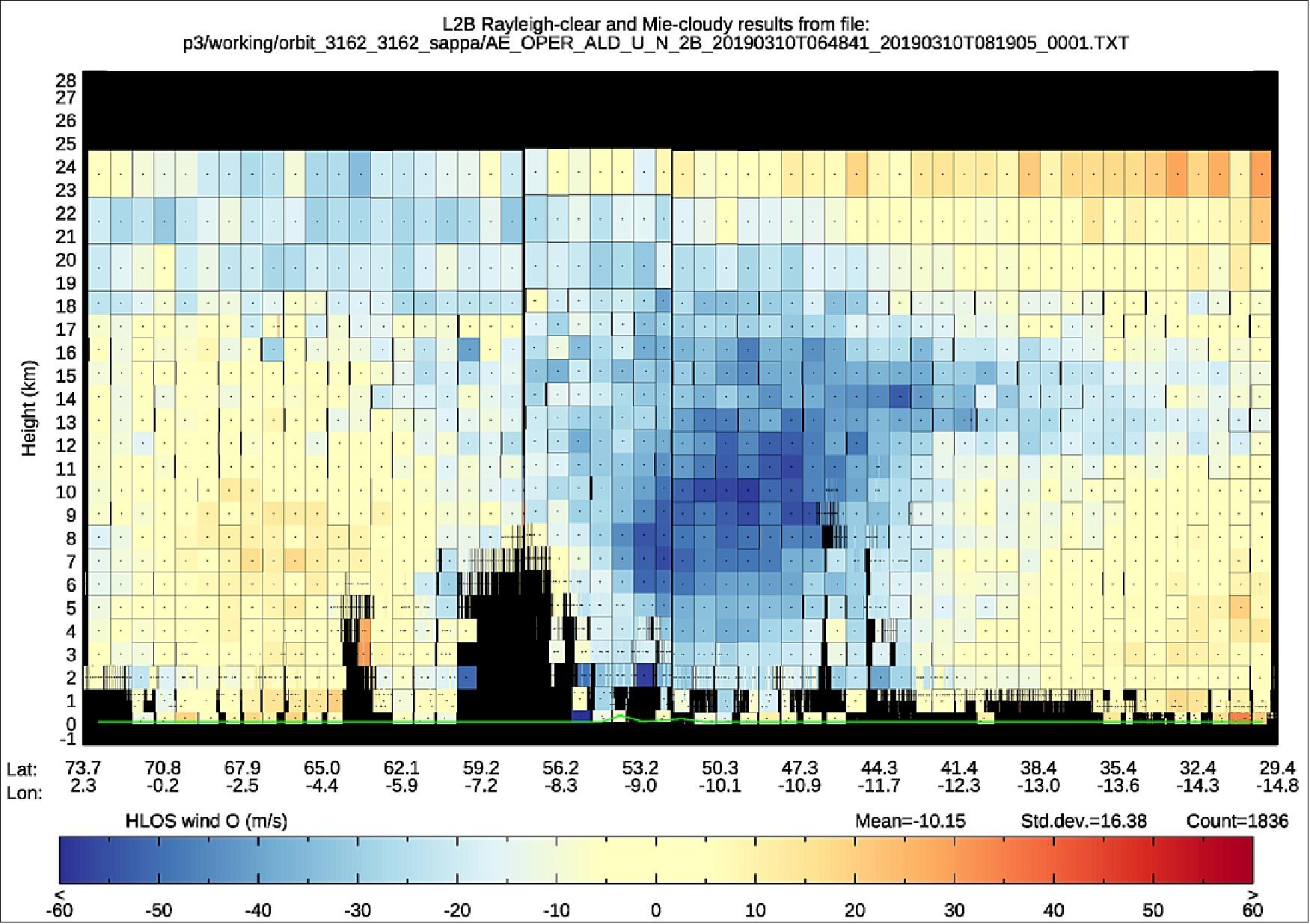
The European Center for Medium-range Weather Forecast (ECMWF) and the German Weather Service (DWD) preliminary analyses showed that Aeolus winds are improving forecasts, particularly in the troposphere, which is the part of the atmosphere between the ground and about 16 km high.
Lars Isaksen, principal scientist at ECMWF, said, "Aeolus' Aladin is the only instrument that provides wind profiles from space. Wind profiles, especially over remote areas, are very important for numerical weather prediction. ECMWF is heavily involved in processing, calibrating and validating the Aeolus wind data, and in just seven months after the satellite was launched, we and other weather centers have carried out numerous impact studies. These results are very promising and indicate that Aeolus winds will improve weather forecasts and help us better understand global wind circulation."
Examples of results presented at the workshop included the storm that hit the UK and parts of Europe on 10 March and Cyclone Idai that devastated Mozambique, Malawi and Zimbabwe.
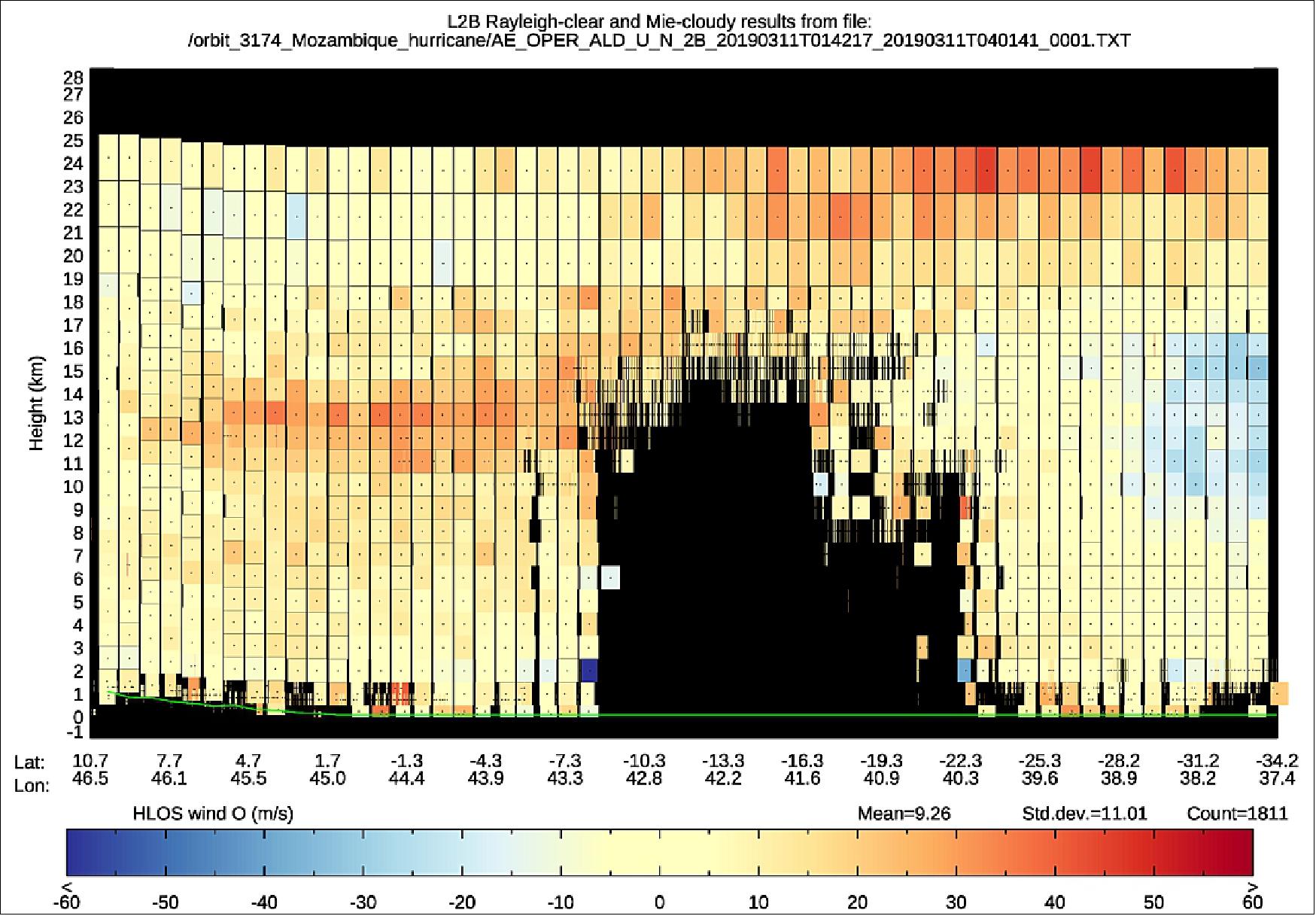
Red indicates wind blowing from east to west (easterlies) and blue indicates wind blowing from west to east (westerlies). Since Aeolus measures wind in the cloud-free atmosphere, and within thin clouds and on top of thick clouds, the measurements here are those surrounding Idai. The black patch is the part of the cyclone, which was covered by a thick cover of spiral-shaped clouds. The image shows strong easterly winds north of the hurricane (in red on the left of the image), with wind speeds up to 150 km/hr (above 40 m/s). In the upper right corner (altitude of 22–25 km), the tropical stratospheric easterly jet can be seen in red, and lower down on the right (altitude of 10–16 km) the sub-tropical westerly jet in the southern hemisphere is visible in blue (image credit: ECMWF–M. Rennie)
- The value of having different satellite instruments observing the same weather event is important for gathering as much information as possible to improve the accuracy of weather forecasts and so that people affected by severe weather can take necessary action.
- Tommaso Parrinello, ESA's Aeolus Mission Manager, said, "We are really happy with the data Aeolus is returning. We also see how the mission can add complementary information to satellites carrying optical instruments such as the Copernicus Sentinel-3 and the satellites carrying radar such as the Copernicus Sentinel-1. While comparisons with ground-based instrumentation and weather models are currently ongoing to refine the calibration and data processing, we expect that the quality of the Aeolus data will be high enough around the end of this year – after which the data will be ready for scientific research and for weather forecasting."
• February 11, 2019: Since launch, engineers and scientists have been carefully checking the information that this pioneering mission is delivering on the world's winds – and now it's time for the next phase. Although our daily weather forecasts are pretty reliable, they still need to be improved further and to do this meteorologists urgently need direct measurements of the wind. 46)
- However, this is no easy task as extraordinary technology is needed to measure the wind from space.
- Nevertheless, ESA's Aeolus satellite has been designed to do just this. It carries the first instrument of its kind and uses a completely new approach to measuring wind.
- Since this is such novel and challenging technology, scientists and engineers have had their work cut out assessing how the satellite is functioning in orbit and checking the quality of the data it is returning.
- For example, they have been comparing this new data with modelled data at the ECMWF (European Center for Medium-Range Weather Forecasts) and have already established improvements to the forecast model thanks to the additional data from Aeolus.
- This will have a positive impact on weather forecast accuracy in general.
- ESA's Aeolus project manager, Anders Elfving, said, "This satellite mission is certainly a challenging one, but I'm very happy to say that we are now formally out of the commissioning phase, which encompasses the first four months of a mission's life in orbit when we do all the checks and tweaks."
- "We still have some work to do to make sure Aeolus delivers on its promise as we have to improve on the way the data is processed taking into account the peculiarities of its instrument. And, we must remember that this is a completely new type of mission, so we are learning all the time. We also have field campaigns going on all over the world to help with the process of calibration and validation. This means measurements of the wind are being taken from the ground, from balloons and from aircraft to compare with measurements we are getting from space.- At this stage, the results are expected to be announced in March."
- One recent field campaign has been carried out in Germany by DLR (German Aerospace Center). This involved flying an aircraft directly under Aeolus' orbital path and taking more or less simultaneous measurements with an airborne version of the satellite instrument.
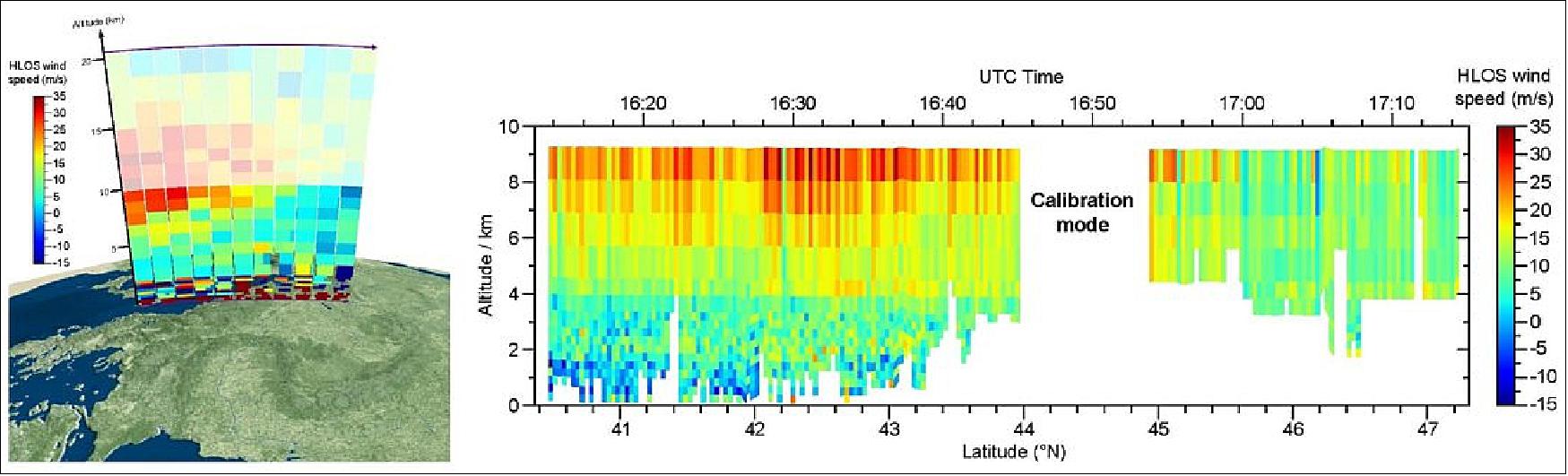
• February 7, 2019: Following the launch of Aeolus on 22 August 2018, scientists have been busy fine-tuning and calibrating this latest Earth Explorer satellite.
Aeolus carries a revolutionary instrument, which comprises a powerful laser, a large telescope and a very sensitive receiver. It works by emitting short, powerful pulses –50 pulses per second –of ultraviolet light from a laser down into the atmosphere. The instrument then measures the backscattered signals from air molecules, dust particles and water droplets to provide vertical profiles that show the speed of the world's winds in the lowermost 30 km of the atmosphere. These measurements are needed to improve weather forecasts. As part of the working being done to calibrate this novel mission, scientists have been taking similar measurements from an aircraft carrying an airborne version of Aeolus' instrument. The pilot flies the plane under the satellite as it orbits above so that measurements of wind can be compared. 47)
• September 12, 2018: Just one week after ESA's Aeolus satellite shone a light on our atmosphere and returned a taster of what's in store, this ground-breaking mission has again exceeded all expectations by delivering its first data on wind – a truly remarkable feat so early in its life in space. 48)
- Florence Rabier, Director General of the ECMWF (European Centre for Medium-Range Weather Forecasts), said, "We always knew that Aeolus would be an exceptional mission, but these first results have really impressed us. The satellite hasn't even been in orbit a month yet, but the results so far look extremely promising, far better than anyone expected at this early stage. We are very proud to be part of the mission. Aeolus looks set to provide some of the most substantial improvements to our weather forecasts that we've seen over the past decade."
- ESA's Aeolus mission scientist, Anne Grete Straume, explained, "These first wind data shown in the plot made by ECMWF are from one orbit. In the profile we can see large-scale easterly and westerly winds between Earth's surface and the lower stratosphere, including jet streams. In particular, you can see strong winds, called the Stratospheric Polar Vortex, around the South Pole. These winds play an important role in the depletion of the ozone layer over the South Pole at this time of the year."
- Named after Aeolus, who in Greek mythology was appointed ‘keeper of the winds' by the Gods, this novel mission is the fifth in the family of ESA's Earth Explorers, which address the most urgent Earth-science questions of our time.
- It carries the first instrument of its kind and uses a completely new approach to measuring the wind from space.
- ESA's Earth Explorer Program manager, Danilo Muzi, said, "Aeolus carries revolutionary laser technology to address one of the major deficits in the Global Observing System: the lack of direct global wind measurements. The essence of an Earth Explorer mission is to deliver data that advances our understanding of our home planet and that demonstrates cutting-edge space technology. With the first light measurements and now these amazing wind data, Aeolus has wowed us on both fronts."
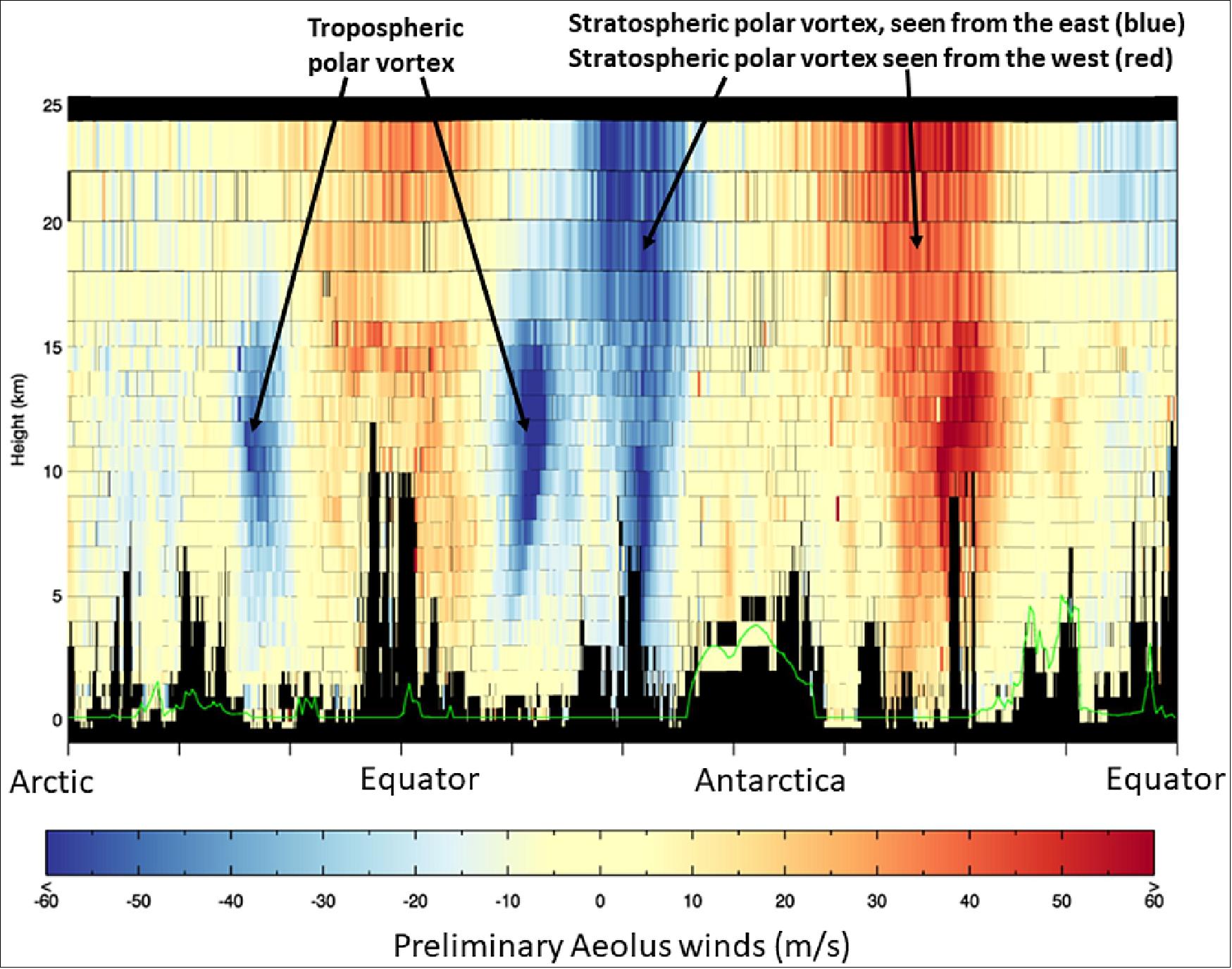
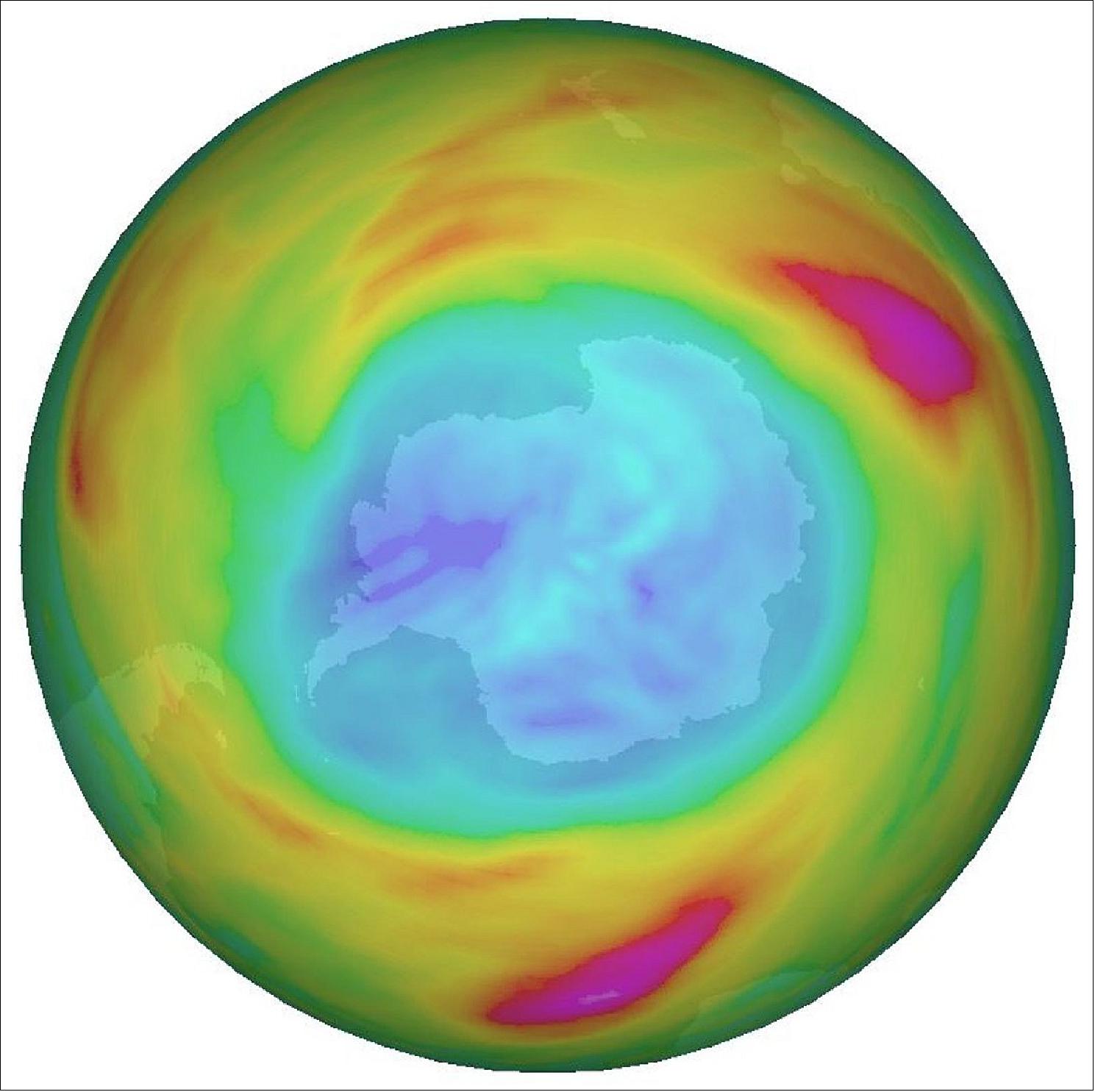
• September 5, 2018: The ALADIN instrument on Aeolus has been turned on and is now emitting pulses of ultraviolet light from its laser, which was fundamental to measuring Earth's wind. And, this remarkable mission has also already returned a tantalizing glimpse of the data it will provide. 49)
- Aeolus carried a revolutionary instrument, which comprised a powerful laser, a large telescope and a very sensitive receiver. It worked by emitting short, powerful pulses – 50 pulses per second – of ultraviolet light from a laser down into the atmosphere. The instrument then measured the backscattered signals from air molecules, dust particles and water droplets to provide vertical profiles that shown the speed of the world's winds in the lowermost 30 km of the atmosphere.
- The mission is now being commissioned for service – a phase that lasts about three months. One of the first things on the ‘to do' list was arguably the one of the most important: turn on the instrument and check that the laser works.
- ESA's Director of Earth Observation Programs, Josef Aschbacher, explained, "Aeolus is a world premiere. After the launch two weeks ago the whole community has been anxiously awaiting the switch-on of the ultra-violet laser, which is a real technological marvel. This has been successful. We have pioneered new technology for one of the largest data gaps in meteorology – global wind profiles in cloud-free atmosphere. I am grateful to all who have made this success possible."
- ESA's Aeolus project manager, Anders Elfving, added, "Aeolus has been one of the most challenging missions on ESA's books. And, unsurprisingly, we have had to overcome a number of technical challenges. After many years in development, we had absolute confidence that it would work in space, but it was still somewhat nerve-racking when we turned on the instrument a few days ago. But the years of work certainly appear to have paid off. After turning it on, we started slowly and steadily increasing the power. It is now emitting at high power – and we couldn't be happier."
- Richard Wimmer from Airbus Defence and Space noted, "It is a very exciting time to have Aeolus safely in orbit and doing what we and our industrial teams spent years building it to do."
- Michael Rennie from the ECMWF (European Centre for Medium-Range Weather Forecasts), added, "At this very early stage in the mission – just three days after the instrument was switched on – Aeolus has already exceeded expectations by delivering data that show clear features of the wind."
- With Aeolus instrument healthy and performing well, engineers will continue ticking off other items on the ‘commissioning to do list' so that in a few months Aeolus will be ready to deliver essential information to improve our knowledge of atmospheric dynamics, further climate research and improve weather forecasts.
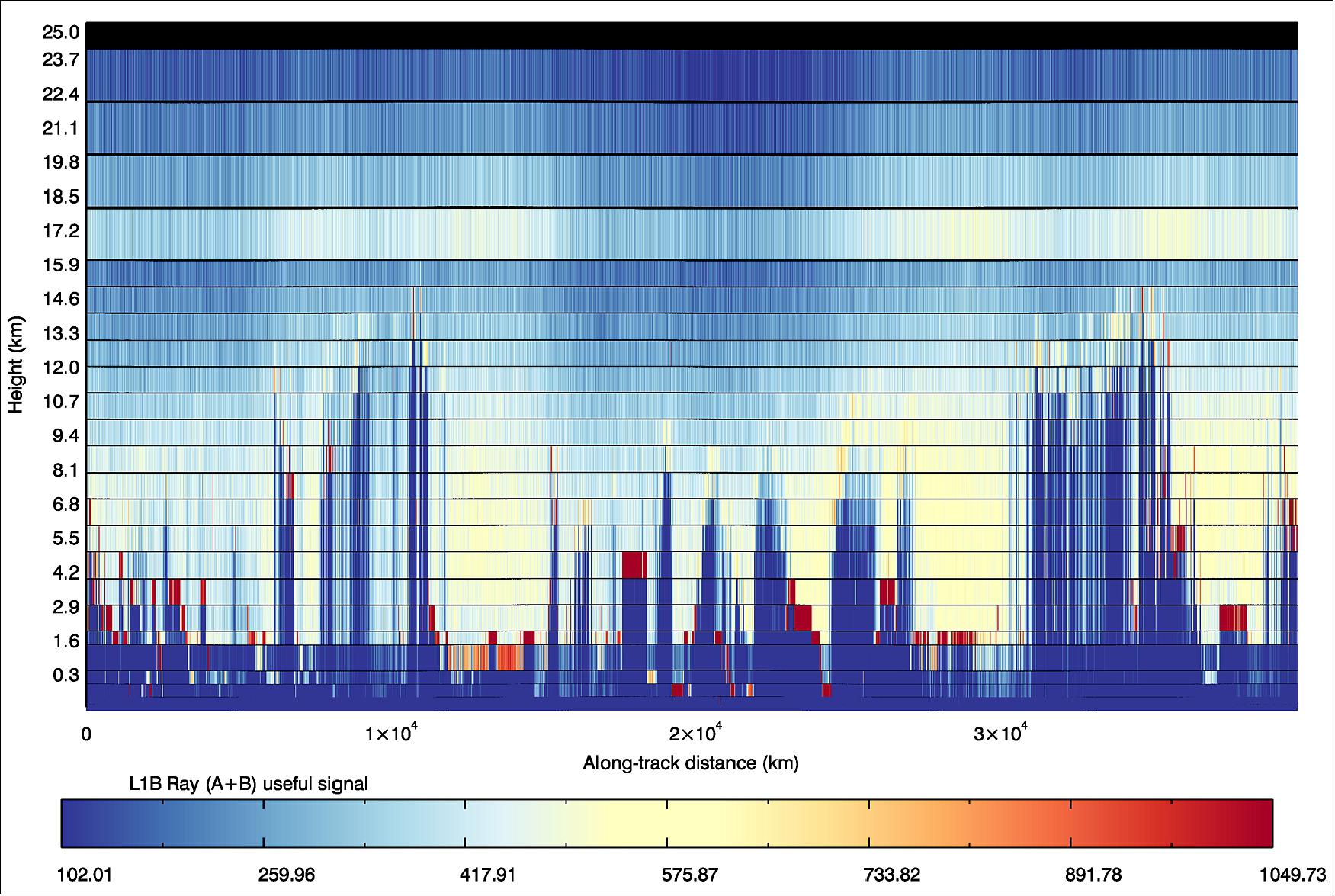
• August 24, 2018: Having worked around the clock since the launch of Aeolus on 22 August, teams at ESA's control center in Germany have declared today that the critical first phase for Europe's wind mission is complete. 50)
- Once in orbit, Aeolus separated from the Vega launcher and began its free-flying journey, unfolding its solar arrays, turning its radio antenna toward Earth and sending signals to ground stations in Australia and Antarctica to signify that all is well.
- An initial radio signal from Aeolus was picked up at 00:15 CEST on 23 August by a special launcher tracking dish, dubbed NNO-2, at ESA's New Norcia station in Australia — the newest in the Agency's network of communication antennas.
- This first, simple, ‘hello' was followed just 15 minutes later by the official data link that was established at the Norwegian Troll Satellite Station in Antarctica. With this full data link, mission teams at ESOC became able to send commands to the satellite and receive the data it will go on to collect.
- Flight control teams guided the satellite through this tense period, working to ensure Aeolus was safely configured and ready for its next milestone: in-orbit commissioning.
- During the commissioning phase of a satellite, controllers nudge it slightly to optimize its position in orbit, and perform tests to ensure the health of its instruments. This step is unique for every satellite, and for Aeolus it was expected to last for several months.
- The main commissioning objective of Aeolus was to fully check out, calibrate and understand the behavior of all systems onboard the spacecraft, now that has taken up its new residence in space. The absolute centerpiece of this, ESA's newest satellite, will be the switch-on and first light of the hypermodern Aladin lidar instrument.
- Once this is done, the real challenge will be to fully calibrate, characterize and tune the instrument, finally making it able to get to work measuring Earth's winds.
The DWL (Doppler Wind Lidar) Operation Principle of ALADIN
DWL is an active observation technique; the instrument fires laser pulses towards the atmosphere and measures the resulting Doppler shift of the return signal, backscattered at different levels in the atmosphere. The frequency shift results from the relative motion of the scatter elements along the sensor line of sight. This motion relates to the mean wind in the observed volume (cell). The measurement volume is determined by the ground integration length of 50 km (sample size), the required height resolution and the width of the laser footprint. The measurements are repeated at intervals of 200 km.
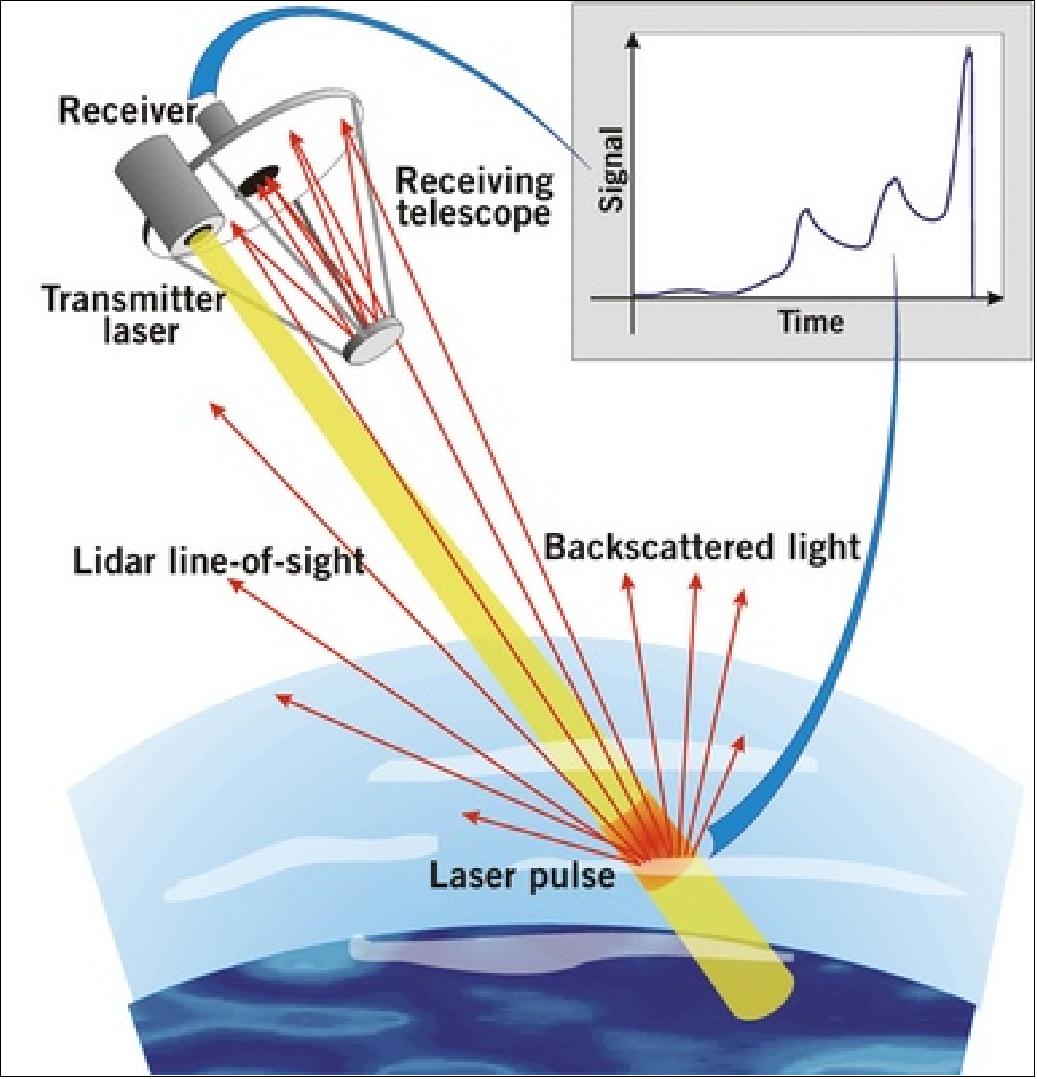
To improve the detection of the Rayleigh signal, the laser emits light pulses in the UV spectral region (355 nm). Detection of the backscatter light and analysis of the Doppler shift is done with high-resolution spectrometers (about 5 x 108 resolving power).
For lidar techniques where the shape of the backscattered light couldn't be directly measured in detail, it was important to know what shape was expected in order to calculate the speed, abundance, temperature or chemical composition of molecules in the atmosphere. - The shape of the backscattered light was described by ‘Rayleigh-Brillouin scattering theory', where the Rayleigh scattering was related to the temperature and Brillouin scattering was related to pressure fluctuations in the atmosphere. The shape of the Rayleigh-Brillouin backscattered light was described by the ‘Tenti' model, which was created in the early 1970s. This model was used worldwide to interpret atmospheric lidar measurements. 51)
Although early ESA studies showed this model to be suitable for interpreting data from the Agency's satellites carrying lidars, it was decided to launch a new laboratory experiment, through ESA's General Studies Program, to see if there was still room for improvement. An advanced model would have led to even better accuracy in lidar measurements.
The study was led by Wim Ubachs of the Laser Centre at the VU University Amsterdam in the Netherlands. The team included participants from the VU University Amsterdam, the University of Nijmegen, Eindhoven University of Technology, the KNMI (Royal Netherlands Meteorological Institute) and the German Aerospace Center, DLR. 52)
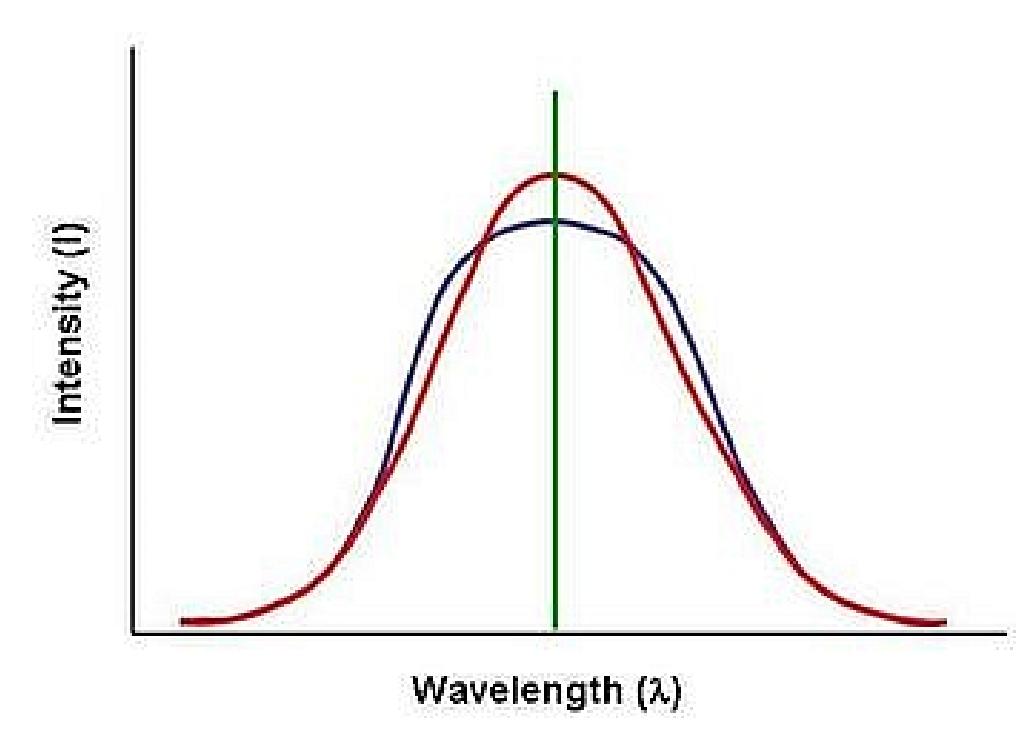
Legend to Figure 46: The red line shows the emitted light after Rayleigh scattering by molecules. The blue line shows the light after both Rayleigh and Brillouin scattering.
Measurements of Rayleigh-Brillouin scattering were taken for a range of pressures and gases, representative of Earth's atmosphere. The measurements were compared to the Tenti model, and as a result the model could be improved. The experiment concluded that the updated Tenti model described the shape of the backscattered light from nitrogen and oxygen to within an accuracy of 98%. It was also confirmed that atmospheric water vapor did not affect the Rayleigh-Brillouin line shape. In addition, the scattering profiles from nitrogen, oxygen and air were shown to be the most accurate ever measured worldwide and will now form the basis for further scientific research into Rayleigh-Brillouin scattering.
The study has delivered a wide variety of profiles that are important, not only to ESA's lidar missions, but also to other scientists working with lidar instruments. Some important issues dealing with the understanding of the profiles related to wavelength, scattering angle and temperature dependencies and polarization effects are still open and will be further studied in a follow-on activity with ESA.
Observation Configuration
The satellite is flown with the ALADIN instrument pointing toward Earth in a plane quasi-perpendicular to the flight path and 35º offset from nadir in the anti-sun direction. The measurement geometry is depicted in Figure 47. The LOS was oriented such that the relative velocity at the intersection with the Earth is zero (yaw steering). All measurements were taken along the LOS. The Doppler shift of the backscatter signal reflects the relative wind speed along the LOS and has to be processed to a horizontal wind speed component, HLOS (Horizontal Line-of-Sight), referenced to the ground.
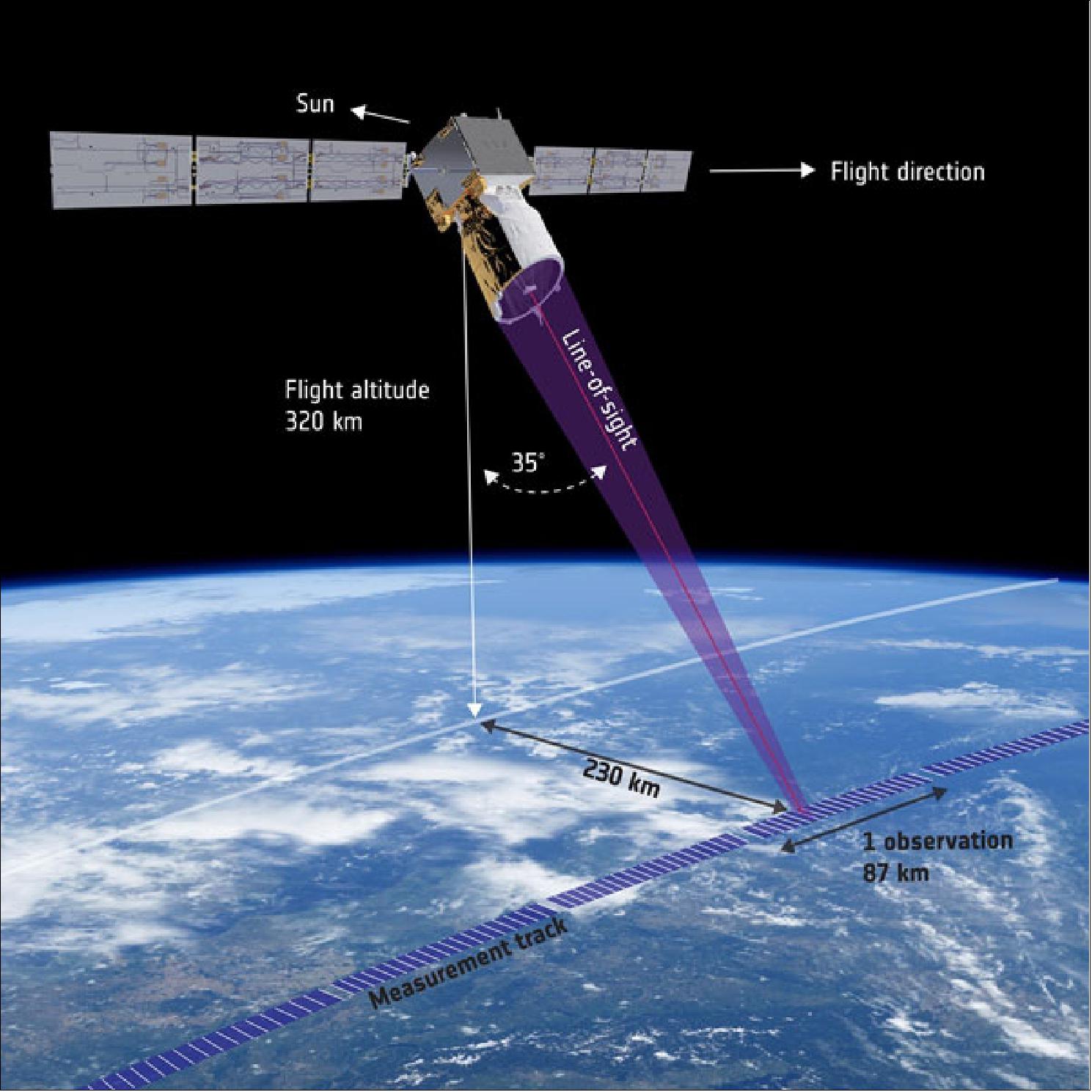
The measurement volume of the return signal from a single shot was defined by the lateral extension of the transmitted beam (a few meters in diameter) and the time gating of the receiver, which is adapted to the desired vertical resolution (250 m to 2 km or more). Due to the fact that the signal from a single shot was too weak for the evaluation, 700 shots along a ground measurement track of 87 km have to be accumulated and integrated.
Measurement profile: The onboard instrument is operated at a duty cycle of 25% to obtain wind profile separation. An active operation cycle lasts 7 seconds (equivalent to about 87 km ground track), followed by a gap in observations of 21 seconds (equivalent of nearly 150 km ground track). Winds can be measured in clear air (i.e., above or in the absence of thick clouds), and within and through thin clouds (e.g., cirrus).
Sensor Complement
ALADIN (Atmospheric Laser Doppler Instrument)
The instrument was developed by Airbus DS (former EADS Astrium SAS), Toulouse, France as prime contractor of an industrial consortium.
ALADIN was an incoherent direct detection lidar incorporating a fringe-imaging receiver (analyzing aerosol and cloud backscatter) and a double-edge receiver (analyzing molecular backscatter). The lidar emitted laser pulses towards the atmosphere, then acquired, samples, and retrieved the frequency of the backscattered signal.
The overall ALADIN instrument architecture was based on a 60 mJ diode-pumped frequency-tripled Nd:YAG laser operating in the ultraviolet (solid-state laser technology). The instrument consisted of three major elements: a transmitter, a combined Mie and Rayleigh backscattering receiver assembly, and the opto-mechanical subsystem (a telescope with a 1.5 diameter). After integration, the telescope wavefront error was measured within the specification (better than half a wavelength). This was a key parameter for minimizing the bias error on the wind speed. 53) 54) 55) 56) 57) 58) 59) 60) 61) 62) 63) 64) 65) 66) 67) 68)
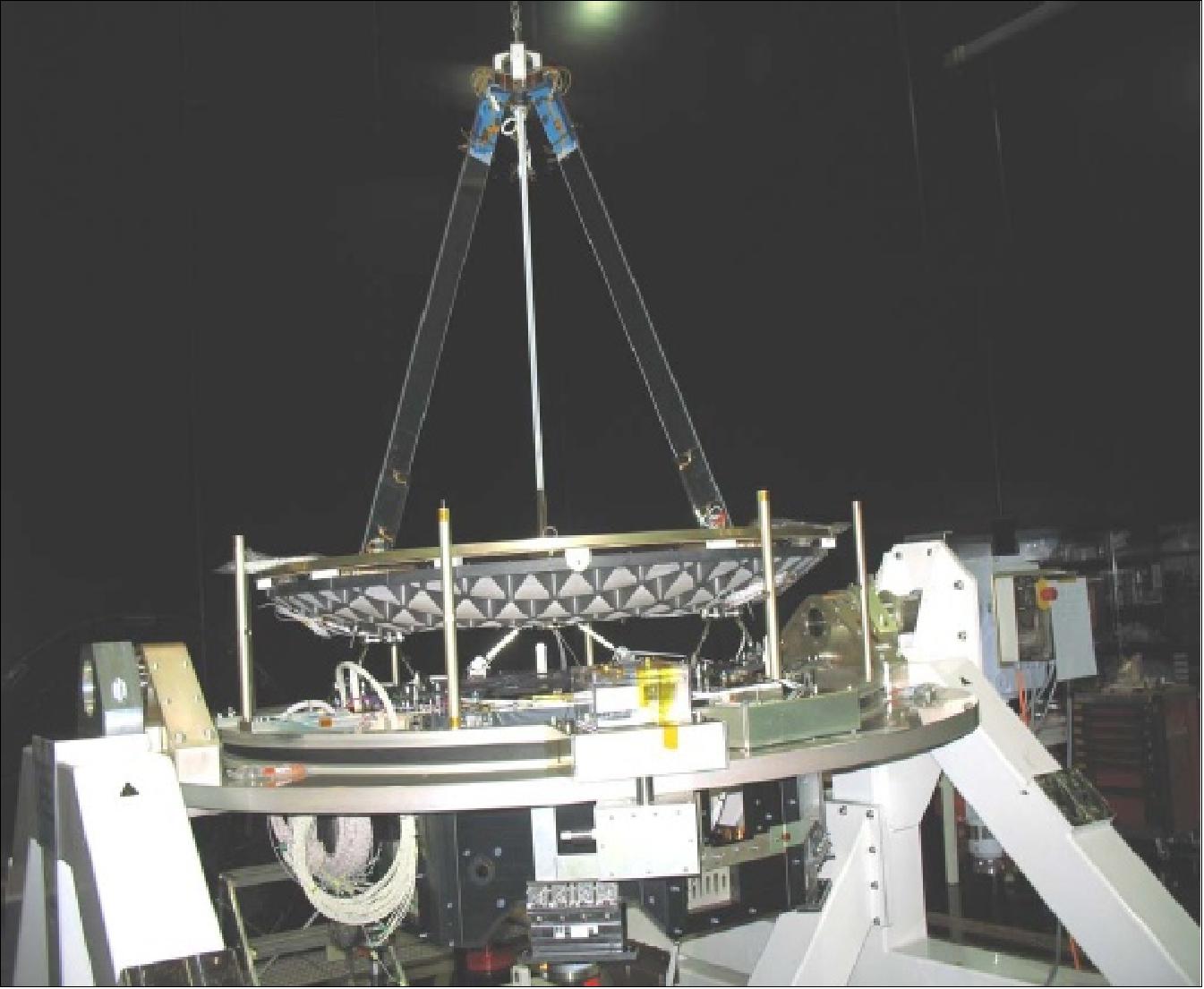
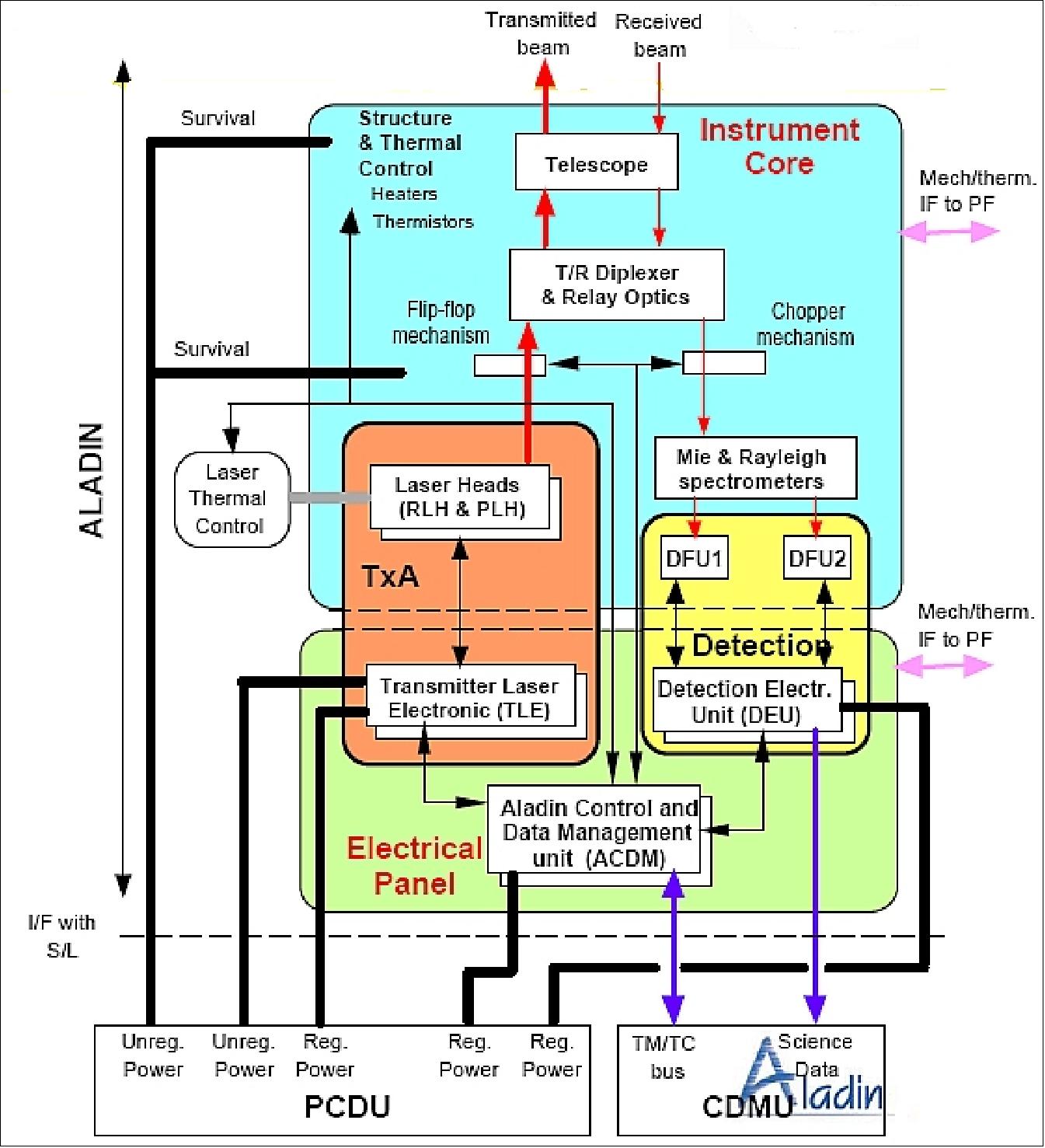
TxA (Transmitter Laser Assembly). The transmitter laser is a diode pumped solid state laser (Nd:YAG). The TxA was composed of:
• PLH (Power Laser Head)
- Diode-pumped Nd-YAG laser
- Emits 60 mJ pulses @355 nm
- Pulse repetition frequency of 100 Hz
- 12 s “bursts” every 28 s
• RLH (Reference Laser Head) 69)
- Highly stable seed laser (a few MHz)
- Tunable over 7 GHz
• PLH and RLH are being conductively cooled
• TLE (Transmitter Laser Electronics)
- High current and voltage driver
- Transmitter control and synchronization.
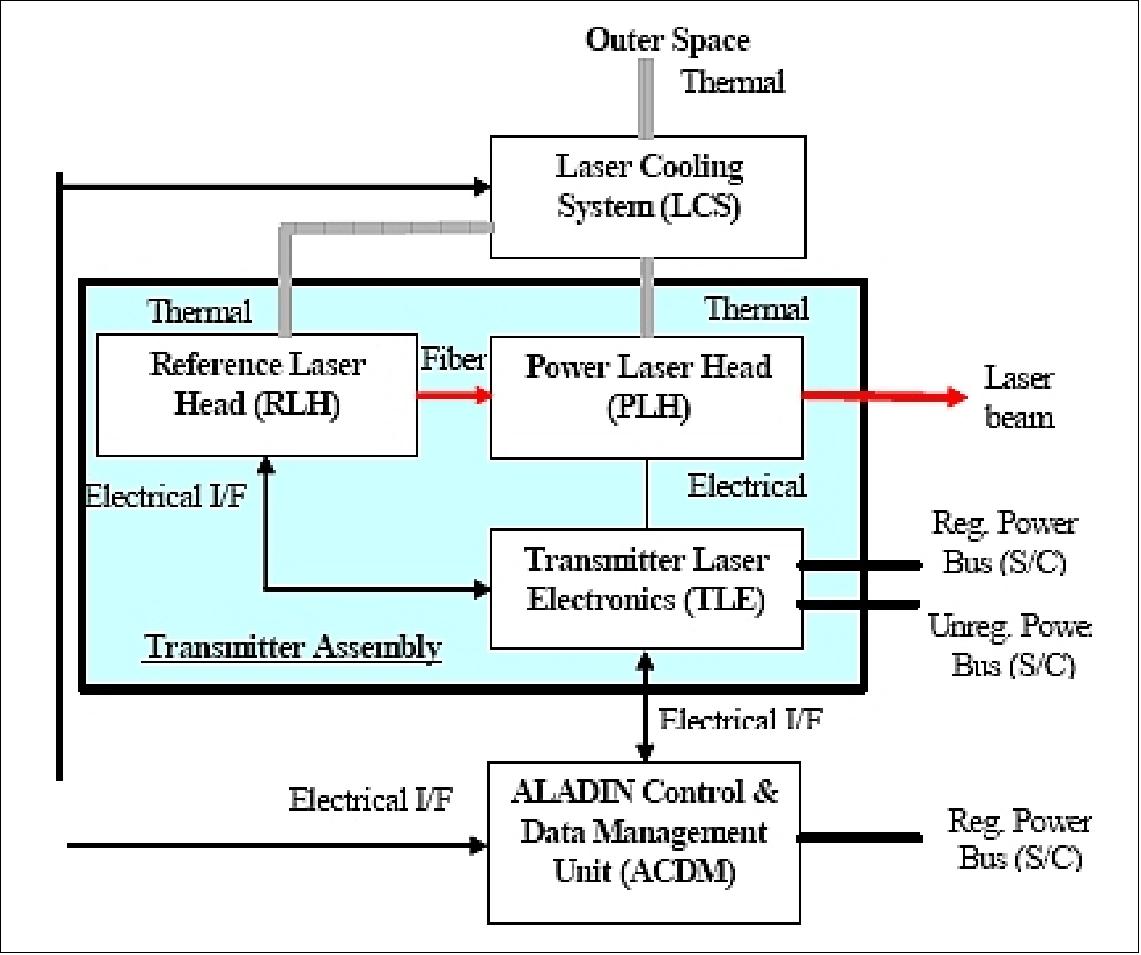
The power laser was composed of a low power oscillator (10 mJ output energy) and two power amplifiers to generate light pulses with 150 mJ energy at the fundamental wavelength of Nd:YAG (1064 nm). This was converted to 60 mJ pulses in the UV (355 nm) by a frequency tripler. The oscillator was actively Q-switched by a Pockels cell. A seed laser was used as frequency reference. The injection seeding technique was used to achieve a single frequency mode with a low-power continuous wave (CW) single frequency laser. The power laser was conductively cooled via heat pipes. The transmitter assembly will be operated in burst mode with 100 Hz PRF during 7 seconds (plus a 5 second warm-up time), in intervals of 28 seconds. There were two fully redundant transmitters, each including two laser heads (Power Laser Head and Reference Laser Head), and a TLE (Transmitter Laser Electronics) module.

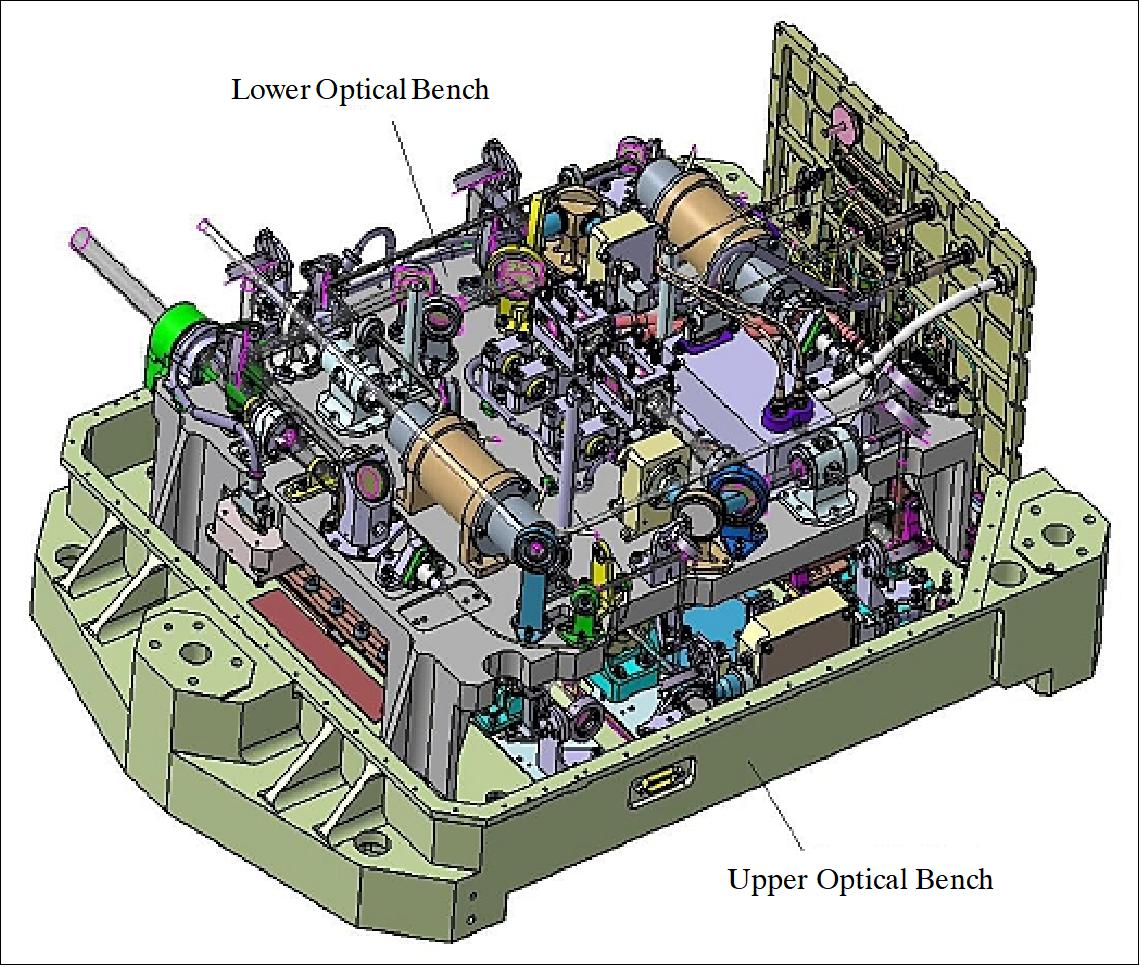
Receiver assembly: A combined Mie and Rayleigh backscattering receiver was implemented. The receiver assembly included the transmit/receive switch (polarization-based), a set of relay optics and diplexers for beam transport and laser reference calibration, a blocking interference filter, the Mie and Rayleigh receivers (spectrometers), and two DFU (Detection Frontend Units).
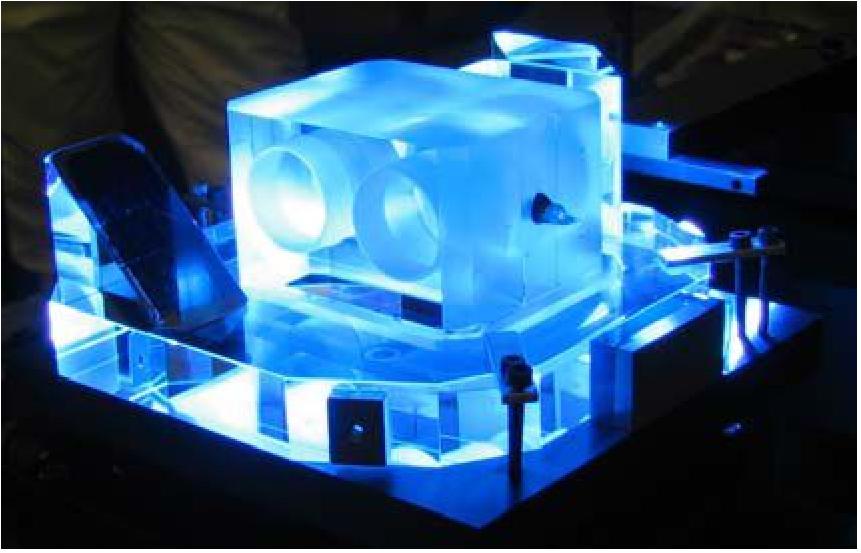
• The Mie receiver consisted of a Fizeau spectrometer. The received backscatter signal produced a linear fringe whose position was directly linked to the wind velocity. The resolution of the Fizeau interferometer was 100 MHz (equivalent to 18 m/s). The wind value was determined by the fringe centroid position to better than a tenth of the resolution. The backscattered signals were detected by a thinned back-illuminated silicon CCD detector working in an accumulation mode which allowed photon counting. In the Mie channel, the Doppler shift was estimated by measuring the displacement of straight fringes produced by either a Fizeau or a two-wave interferometer.
• The Raleigh receiver employed a dual-filter (also referred to as double-edge) Fabry-Perot interferometer (where the Doppler shift was estimated from the variation of the signal transmitted through two filters located on both sides of the broad Rayleigh spectrum) with a 2 GHz resolution and 5 GHz spacing. It analyzed the wings of the Rayleigh spectrum with a CCD. The etalon was split into two zones, which were imaged separately on the detector. The wind velocity was proportional to the relative difference between the intensities of the two etalons.
The optomechanical subsystem of ALADIN used a Cassegrain afocal telescope for both functions of laser emission and backscatter reception. The optomechanical architecture employd the monostatic observation concept: i.e., the transmit and receive beams propagated through the same telescope.
This architecture allowed to limit the instrument FOV: to ameliorate for instance the daytime performance, and to relax the telescope and optics stability requirements. TRO (Transmit-Receive Optics) was a major subsystem of ALADIN, directing the laser pulses towards the atmosphere, generating internal reference signals and feeding the atmospheric return signal into the subsequent optical analyzers. 70)
The telescope design employed isothermal and lightweight techniques based on SiC (Silicon Carbide) type ceramic mirrors and structures. This concept provided the needed optical quality and stability without a focusing or alignment mechanism. Star trackers for attitude sensing were mounted on the telescope structure to minimize the misalignment between the optical axis and the telescope's line-of-sight.
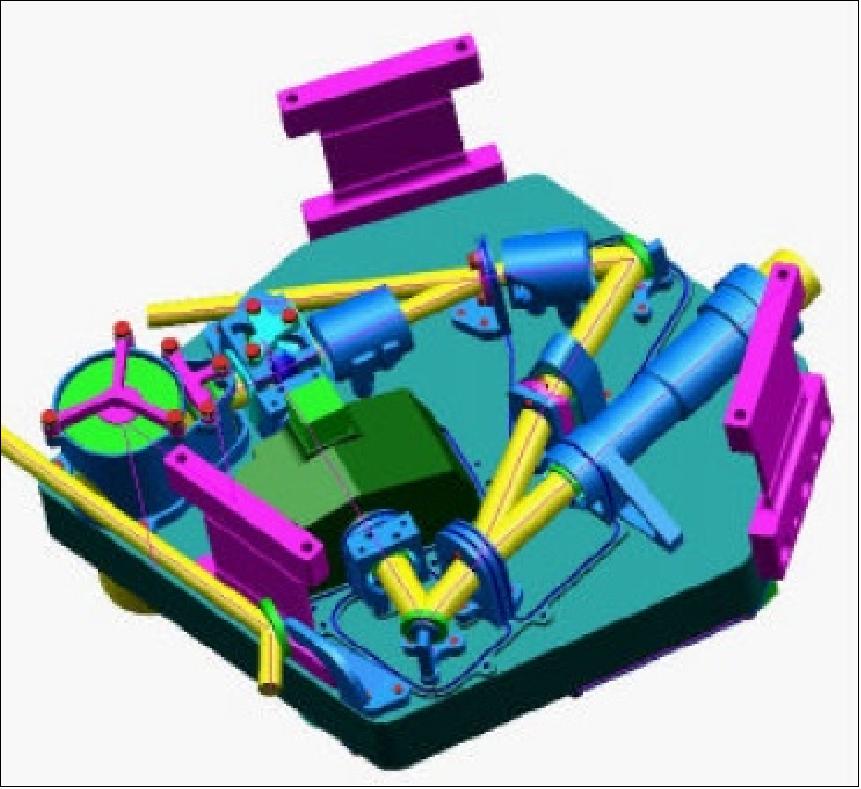
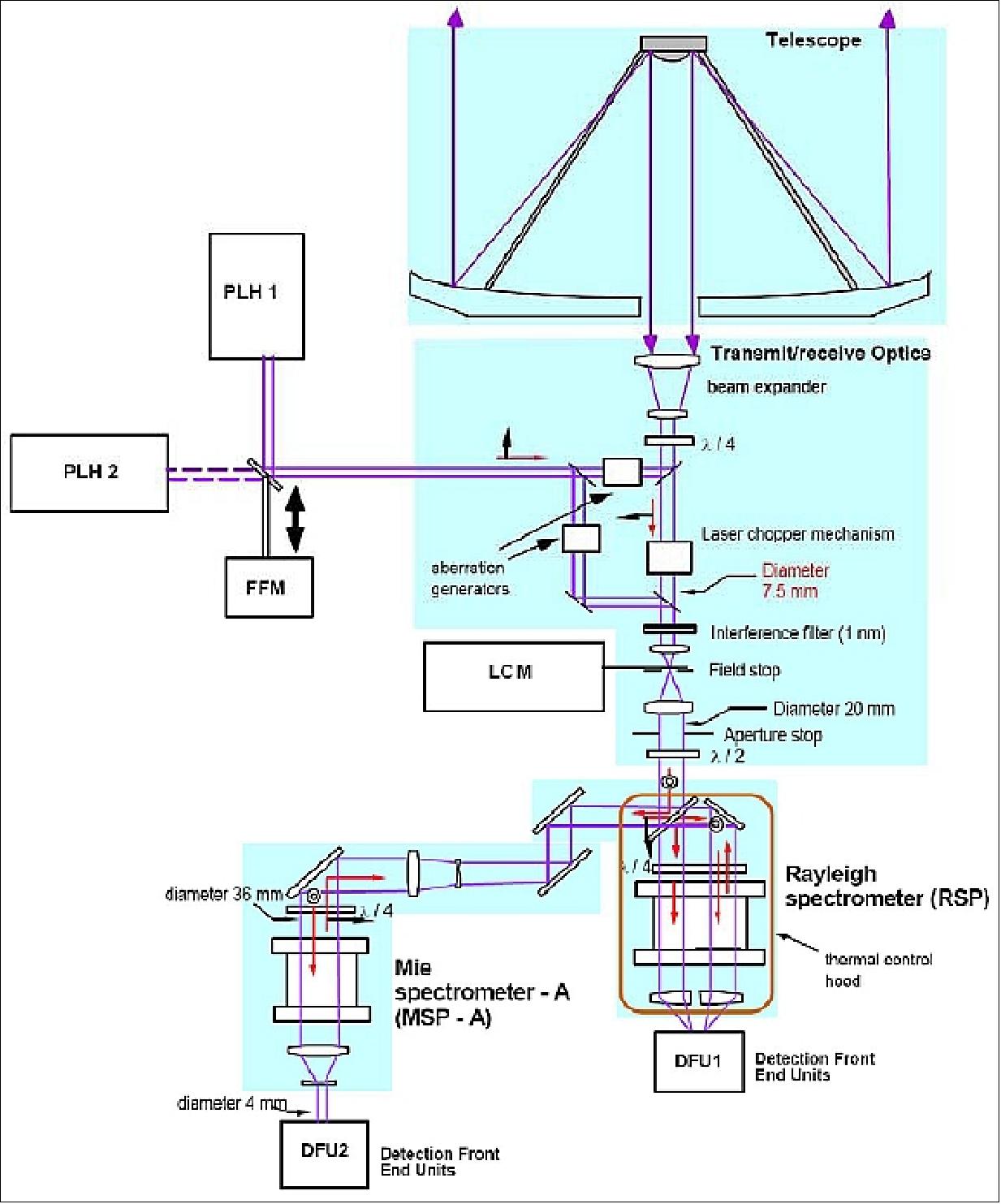
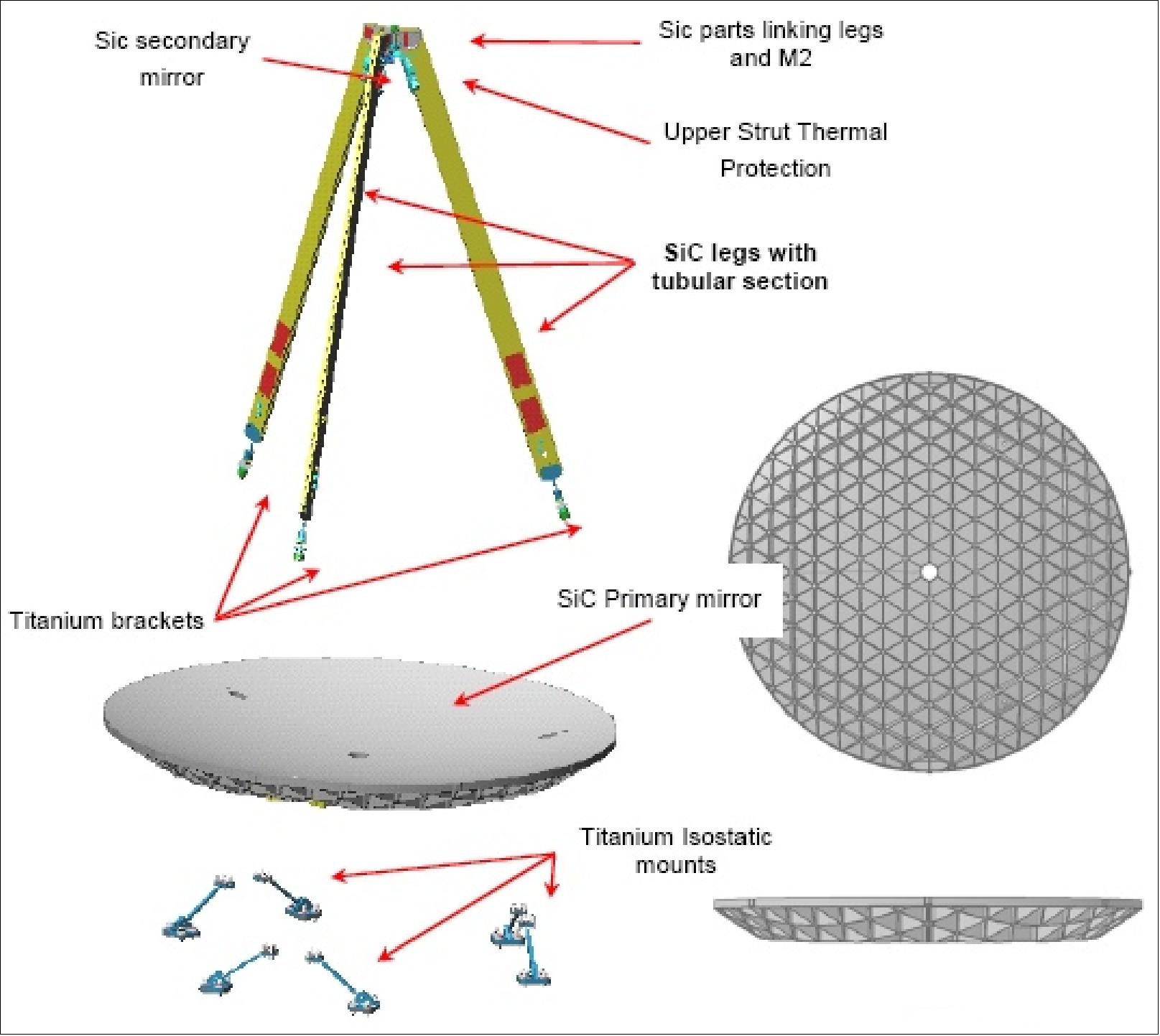
The instrument transmitted raw source data consisting of the accumulated spectra from the Mie receiver and the flux intensities from the Rayleigh receiver. These data were provided for strips of 50 km length and a horizontal resolution down to 3.5 km. In the vertical direction, many layers or volume cells of the various altitude bins (nominally -1 km to 16.5 km height for the Mie channel, and 0.5 km to 26.5 km for the Rayleigh channel, but other scenarios can be uplinked in flight) were measured; the instrument looks into a fixed direction (quasi perpendicular to the flight path and 35º away from nadir) and provided a vertical wind profile along the line of sight.
In addition to these source data, laser internal calibration and attitude data were transmitted, as well as the receiver response calibration data.
The instrument performance considered the SNR error for each channel at the indicated altitude range. In addition, systematic bias errors were taken into account. When no ground echo was retrieved, the measurement bias was not cancelled; the total measurement error was slightly deteriorated. - For the Mie channel, the LOS (Line-of-Sight) wind error was below the requirement of 0.6 m/s for altitudes from 0 to 2 km in height. For the Rayleigh channel, the LOS wind error was below the requirement (except a marginal performance around 16 km).
| Aeolus requirements | Aeolus predicted performances | ||||
Parameter | Planetary Boundary Layer (PBL) | Troposphere | Stratosphere | PBL | Troposphere | Stratosphere |
Wind velocity range |
| ±150 m/s | ||||
Vertical domain | 0-2 km | 2-16 km | 16-20 km | 0 - 2 km | 2 - 16.5 km | 16.5-26.5 km |
Vertical resolution | 0.5 km | 1.0 km | 2.0 km | 0.25 km | 1.0 km | 2.0 km |
Horizontal domain | global coverage | 80º S to 85º N | ||||
Number of profiles/hour | 100 | 100 | ||||
Profile separation | > 200 km | > 200 km | ||||
Temporal sampling | 12 hours | 12 hours | ||||
Accuracy of wind velocity | 2 m/s | 2-3 m/s | 3 m/s | < 1 m/s | < 2 m/s | 2 m/s |
Horizontal integration | 50 km | 50 km | ||||
Bias error | 0.4 m/s | 0.35 m/s | ||||
Slope error | 0.7% | 0.7% | ||||
Reliability | 95% | > 95% | ||||
Timeliness of data availability | 3 hours | > 3 hours | ||||
Length of observational data set | 3 years | 3 years | ||||
Instrument type | Diode-pumped Nd:YAG lidar with active Q-switch |
Transmitter (emitter) |
|
Receiver |
|
Signal processing capabilities |
|
Opto-mechanical subsystem |
|
Instrument mass, power | 500 kg, 840 W average power (25% duty cycle) |
Instrument data rate | 11 kbit/s (max) |
Technology Introduction
The ALADIN instrument on ADM-Aeolus employed several novel technologies, like:
- Fizeau interferometer for aerosol return
- Sequential Fabry-Perot interferometer for molecular return
- Accumulation CCD as detector (also referred to as ACCD).
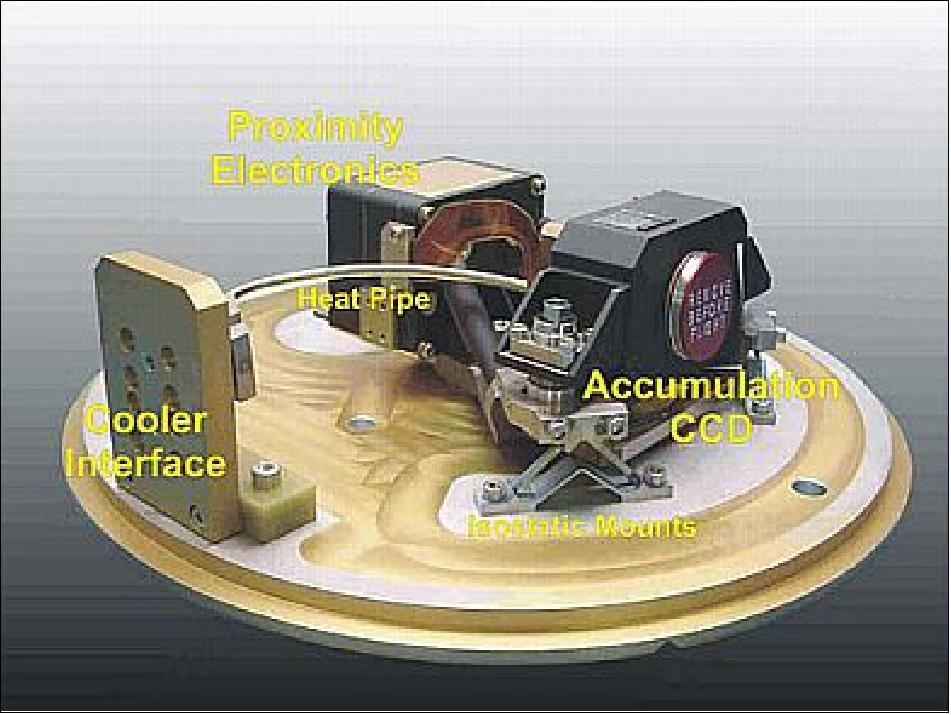
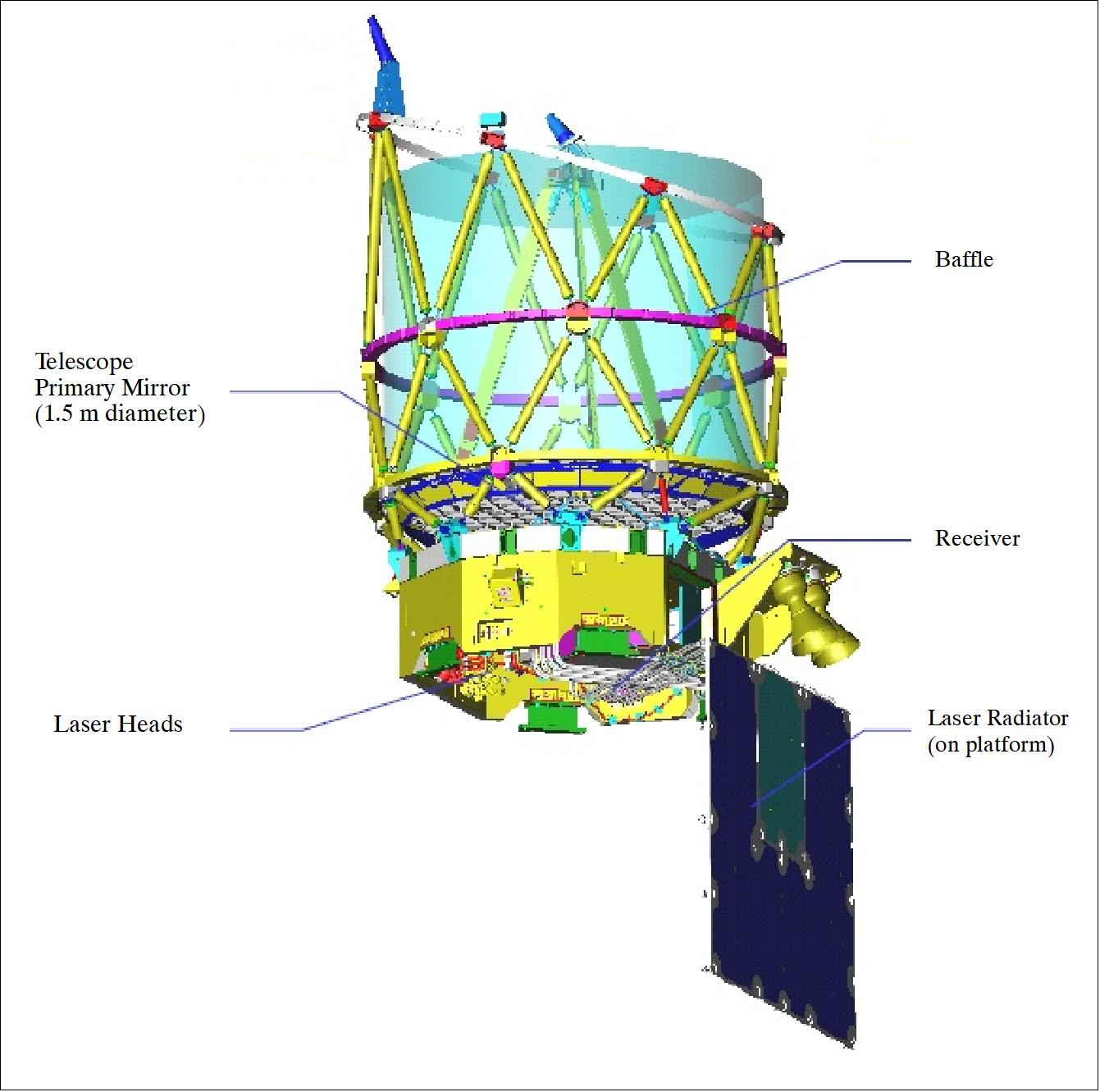

Parameter | PBL (Planetary Boundary Layer) | Troposphere | Stratosphere |
Vertical domain | 0-2 km | 2-16 km | 16-20 km (30) |
Vertical resolution | 0.5 km | 1.0 km | 2.0 km |
Horizontal domain | global | ||
No of profiles | > 100 /hour | ||
Profile separation | > 200 km | ||
Horizontal integration length | 50 km | ||
Horizontal sub-sample length | 0.7 to 50 km | ||
Accuracy (HLOS component) | 1 m/s | 2 m/s | 3 m/s (5) |
Data reliability | 95% | ||
Data availability | 3 hours (0.5) | ||
Length of observational data set | 3 years | ||
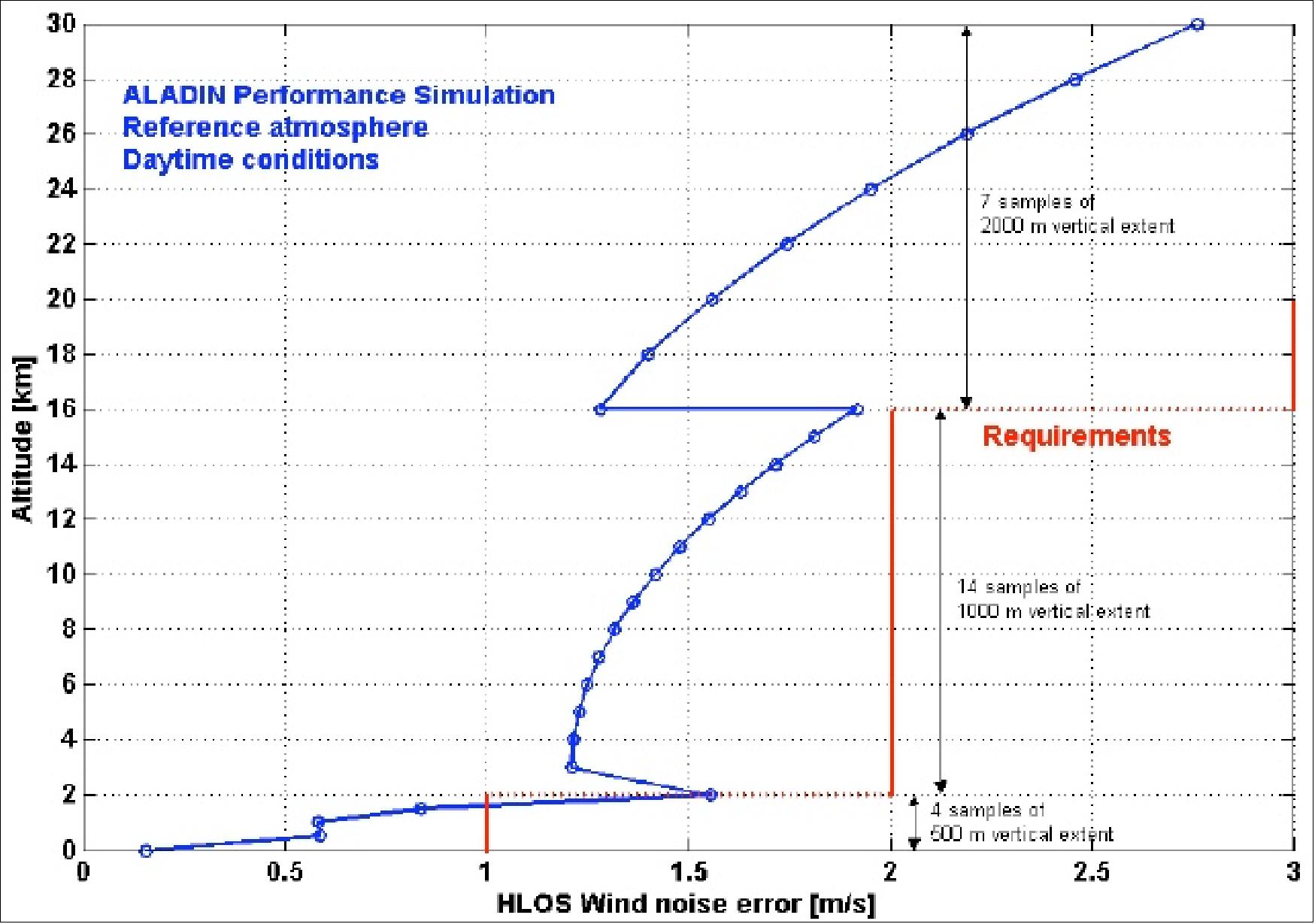
Legend to Figure 60: These are measurement performance estimated from the surface up to 30 km altitude. The red line indicates the observational requirements as given by Table 5.
A programmable sequencer was implemented for the detector permitting configuration changes with regard to vertical altitude resolution and range coverage. The vertical resolution could vary from 250 m to 2 km or more. However, the measurement accuracy was only obtained for the nominal vertical resolution of 1 km. The altitude range was limited to 30 km. The horizontal (along-track) onboard accumulation length could also be changed between a distance of 1.0 km and 3.5 km.
In addition to the horizontal line-of-sight (HLOS) velocity measurements, ALADIN was able to provide information on cloud characteristics over the depth of the atmosphere, as well as aerosol measurements in the troposphere. These included:
• Cloud top height (notably cirrus top and base)
• Cloud cover
• Cloud and aerosol extinction and optical thickness
• Identification of multi-layer clouds
• Lower troposphere aerosol stratification
• The height of the tropopause
• The height of the PBL (Planetary Boundary Layer).
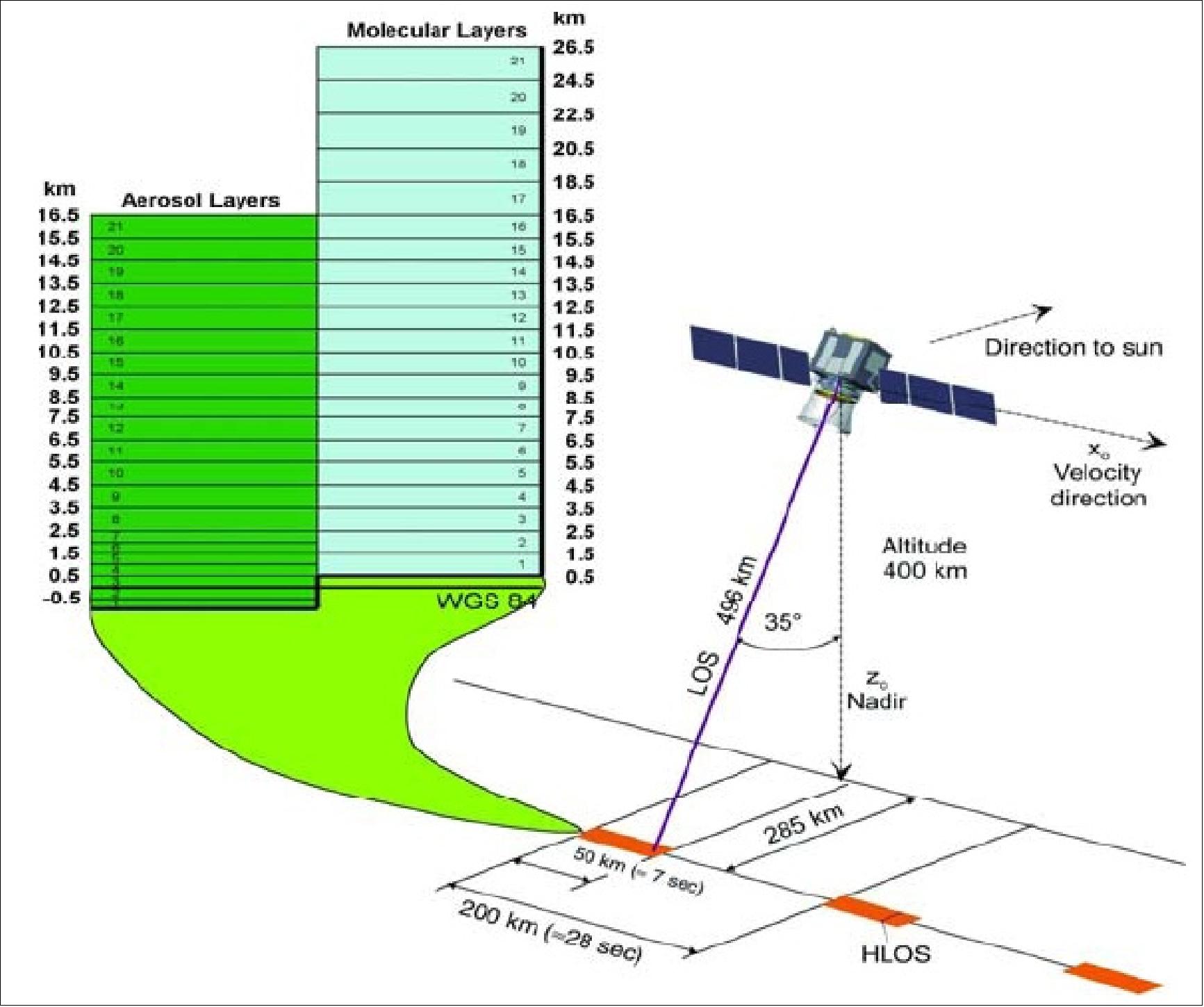
Change of operational principle (change from burst mode to continuous mode for ALADIN laser):
The change of operational principle of the laser transmitter had minor impact on the other sub-systems of ALADIN and on the platform. Exchange of FPGA (Field Programmable Gate Arrays) in the TLE (Transmitter Laser Electronics), the DEU (Detection Electronics Units) and the ALADIN Control & Data Management unit (ACDM) as well as minor modifications of the operation software and the ground processing software are required (Ref. 67).
The laser transmitter continued to be the greatest development challenge. Delays in the transmitter program resulted from two main problem areas, namely LIC (Laser-Induced Contamination) caused by the interaction of the high power UV beam with outgassing materials in the vicinity of optics, and LID (Laser-Induced Damage) due to the fact that some of the optics are near the “state of the art” in terms of surviving the high fluences of the laser, particularly in the UV section. 71)
One of the most extensive test programs for LID was undertaken by DLR Stuttgart, on each of the coating lots of all flight optics, along with a number of endurance tests, in order to demonstrate sufficient LIDT margins for the duration of the mission.
The first flight model of ALADIN laser had been integrated and the second flight model integration was prepared. Once the lasers were fully characterized and delivered, the integration of ALADIN resumed.
Ground Segment
Spacecraft operations were performed at ESOC (Darmstadt, Germany) using the Kiruna TT&C station. The instrument data was received nominally by the ground station in Svalbard (Spitzbergen). Additional X-band receiving stations (antenna diameter as small as 2.4 m) could easily be added to provide a shorter data delivery time.
The two primary components of the Ground Segment were the FOS (Flight Operations Segment) and the PDS (Payload Data Segment). The Aeolus ground segment at ESOC was scheduled to use the latest version of the SCOS-2000 mission control system (version 5).
For the complete mission duration (launch up to the end of mission, when ground contact to the spacecraft/payload was terminated), facilities and services were provided to the PDS (Payload Data Segment) located at ESA/ESRIN (Frascati, Italy) for planning of scientific data acquisition. This included the uplink of instrument operation timelines as well as the provision of scientific data downlink schedules based on the predicted spacecraft orbit. The PDS was responsible for measurement data acquisition via the X-band station network, the preprocessing of scientific data, and the scientific data archiving and distribution to the Meteorological Centers and general scientific community. 72) 73)
The FOCC (Flight Operations Control Center) operated from a dedicated control room at ESOC. Data processing was done at ESA/ESRIN, while wind profile retrieval was done by the ECMWF (European Centre for Medium-Range Weather Forecasts), UK. Data ground processing would have been completed within five minutes after reception. 74)
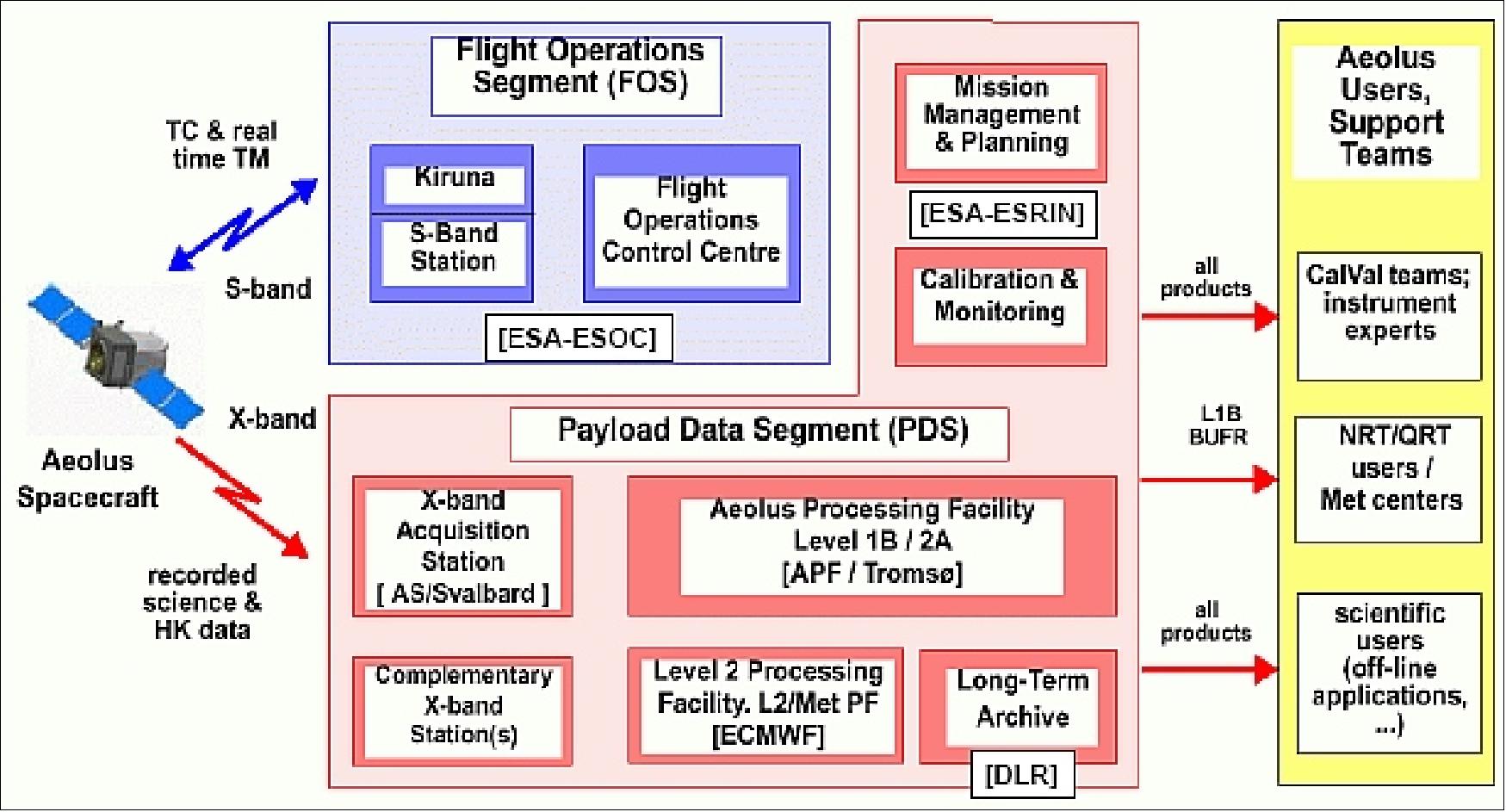
The key operational requirements for Aeolus driving the overall mission operations concepts were:
• Aeolus should have returned near global measurements of wind speed
• Data measurements should have been collected with an availability of 0.95
• The collected data should have been delivered to the Data Center in less than three hours from the time of measurement
• Full 5 day autonomy including a sustainable safe mode
• Orbit related driven specifications for repeat periods, orbit period, pattern of ground station passes, and frequency of orbit control maneuvers.
Operational automation in the ground segment: ADM-Aeolus opted to be one of the first missions to utilize the mission automation systems developed as part of ESOC infrastructure, namely MATIS (Mission Automation System) and SMF (Services Management Framework). An initial simple automation approach had been taken to allow Aeolus to set automation targets which would have had no impact on FOCC readiness for flight. Two simple initial targets had been set:
- Automation of Control Center to TT&C station link configuration pre-pass and post-pass
- Automation of playback of the X-band HK data dumps.
A further automation phase would have covered TM monitoring, analysis and reporting.
The PDS would have been in charge of the science data reception via X-band and of various processing, archiving and product dissemination tasks. It would have included the X-band acquisition station located in Svalbard (Norway), the APF (Aeolus Processing Facility ) located in Tromsø (Norway) for the processing and dissemination of the Level 1B and Level 2A products, and the Level 2 Processing Facility (L2/Met PF) hosted by the ECMWF (European Centre for Medium Range Weather Forecast) in Reading (UK).
Data Products
The primary data product of the mission was the Level 1B data set, comprising calibrated wind velocity observations for both Mie and Rayleigh channels, with various additional annotation parameters.
With the continuous mode laser operation, each observation profile was constructed by the averaging of N on-board accumulated measurements of P consecutive pulses. Typical figures for N and P are, respectively, 30 and 20, leading to an observation horizontal integration length of 90 km, with less than 1% data gap between successive observations (instead of 50 km in burst mode with 150 km data gap between observations). The different values provided in Table 3 corresponded to the horizontal integration length that needed to be considered in order to meet the wind velocity random error requirement.
The Level 1B products were going to be globally delivered to a number of meteorological service centers within 3 hours after sensing (NRT service) and for selected regions within 30 minutes after sensing (QRT service, e.g. within 30 minutes).
Higher level products included information on clouds and aerosols optical properties (Level 2A), as well as consolidated horizontal line-of-sight wind observations (Level 2B), after temperature/pressure corrections and scene classification of the measurements within one observation. The assimilation of Level 2B data in the ECMWF operational forecast model provided the so-called Aeolus assisted wind products (Level 2C).
Product | Contents | Typical size/orbit |
Level 0 | Raw ‘science’ source packets including unprocessed instrument and platform telemetry, packet quality parameters | ~60 MByte |
Level 1B | Engineering calibrated wind velocity data (preliminary one component wind observations), including viewing geometry, scene geolocation and ground echo data | ~87.5 MByte |
Level 2A | Supplementary data product for cloud and aerosol optical properties (layer backscatter and extinction coefficient, top /base heights, optical depth....), including viewing geometry, scene geolocation data and error quantifiers | ~ 20 MByte |
Level 2B | Consolidated geolocated wind observations after atmospheric corrections and scene classification, including additional geophysical parameters and error quantifiers | ~ 42 MByte |
Level 2C | Aeolus assisted wind data, result of NWP assimilation processing, including vertical wind vector profiles (u & v components) and supplementary geophysical parameters | ~ 46 MByte |
Preparatory Campaigns for the Verification of the Measurement Principle
An A2D (Aladin Airborne Demonstrator) instrument was developed by EADS Astrium SAS to demonstrate and validate the capability of ALADIN. Installation and testing of the A2D on ground was performed with first atmospheric signal in October 2005. The two functional test-flights (Oct. 18 and 20, 2005) were performed with signal from clear atmosphere, clouds and ground. The measurements demonstrated that the aircraft integration and testing was successful. These were probably the first flights of an airborne, direct-detection Doppler wind lidar worldwide. 77) 78) 79) 80) 81) 82) 83) 84)
Campaign | Location | Period | Duration |
AGC-1 (Aeolus Ground Campaign-1) | DWD-MOL, | October 2006 | 4 weeks (+1 week) |
AGC-2 | DWD Lindenberg, Germany | July 2007 | 2 weeks (+1 week) |
Aeolus flight campaign 1 | DLR Oberpfaffenhofen, | November 2007 | 15 days / 25 hours |
Aeolus flight campaign 2 | DWD Lindenberg, Germany and other European sites | Spring 2008 | 2 weeks (25 hours) |
• In August 2009, DLR performed a campaign on Germany’s highest mountain, the Zugspitze. The clean mountain air was needed to provide the right conditions to investigate what effects the atmosphere would have on the return signal of the satellite's core instrument. The objective was to accurately measure the spectrum of the backscattered laser light from a lidar to further improve the measurements of wind speed. The experiments were carried out by DLR at the Environmental Research Station Schneefernerhaus observatory, which is located 2650 m above sea level. The science measurements were done with the A2D. 85)
• In March 2010, a DLR team conducted a flight campaign of 2 weeks in Iceland, performing a total of six flights over Iceland, over the ocean between Iceland and Greenland and over the Greenland glacier plateau. The aim of this DLR-led campaign with A2D was to investigate details of the instrument operations strategy and to refine the ADM-Aeolus data processors that will provide the mission's wind products. 86) 87)
Two different wind lidar instruments – the A2D (ALADIN Airborne Demonstrator), and a reference wind lidar operating at an infrared wavelength of two microns – were operated onboard DLR's Falcon 20E aircraft, and both performed well throughout the campaign.
• In May 2015, DLR is using its Falcon research aircraft to test an aircraft-based version of the wind measurement laser technology. From their temporary base in Iceland, the researchers are flying over the ice sheets of southern Greenland. As they do so, another proven wind lidar that was used over Iceland to take volcanic ash measurements during the eruption of Eyjafjallajökull in 2010 was used as a reference and comparison instrument on board the Falcon. The United States aerospace agency, NASA, is also in Iceland, supporting the campaign with its own research aircraft and measurement equipment. 88)
- Windiest place on Earth: Europe's weather systems are formed in the arctic polar region around Iceland and Greenland. Small anomalies that occur where cold air masses from the polar regions meet warmer air masses can lead to the development of weather systems. The Icelandic depressions here are well known. In addition, the polar region of Greenland is of particular interest in climate research because of the rising temperatures in the Arctic and the associated retreat of polar ice sheets. "In the current research flight campaign, we are calibrating the new wind lidar above the extensive ice fields of Greenland – testing our algorithms in the process – to make sure that, later on, everything runs smoothly in space," says Oliver Reitebuch from the DLR Institute of Atmospheric Physics. In particular, the southern tip of Greenland – the windiest place in the world – is the perfect testing ground for the new wind measurement technology, as it is especially challenging, with pronounced tip jets and strong jet streams.
- NASA and DLR joint flights: "We are conducting several flights per day above the permanent ice of Greenland and, in doing so, are acquiring comparative data from a summit station operated by our US research colleagues at an altitude of 3200 m," says DLR test pilot Philipp Weber. After taking off from Iceland, the Falcon crew makes a refuelling stop at Kangerlussuaq in Greenland and then spends two hours crisscrossing Greenland. In total, some 10 test flights above Greenland are planned, which will mostly take place in coordination with the NASA DC-8 research aircraft. The data from the NASA DC-8 and the DLR Falcon will then be compared. Two lidar instruments are being used on board the NASA DC-8, in addition to measurement probes that are ejected from the aircraft via a chute.
- Scattered light makes wind fields visible: At present, the major wind fields over the oceans are still detected optically by weather satellites tracking cloud movements, or measured indirectly using radar signals reflected by the wave motion on the surface of oceans. "The wind lidar measurements will enable the project team to directly measure wind speeds from ground level up to an altitude of 20 km with significantly greater accuracy. Depending on the altitude, the project can achieve a resolution of between 500 to 1000 m while doing so," explains Reitebuch. "With the Doppler lidar –a laser pulse sequence is emitted into a wind field at a precisely defined wavelength. Depending on the movement of the wind field, the light is reflected back with a very small change in wavelength. From this, the team can determine the wind speed," continues Reitebuch. Using this technology, the DLR researchers will be capable of accurately determining changes as small as one ten billionths of a wavelength.
- Small anomalies with large effects on the weather: In addition to testing the wind lidar above Greenland, the DLR atmospheric researchers are acquiring data on the formation and development of Icelandic depressions. The researchers hope to better understand how low-pressure systems arise from small anomalies over Iceland, Greenland and the North Atlantic in a short time. "From Iceland, measurements can be performed in the strong jet streams over the North Atlantic. Detailed knowledge of the wind distribution is particularly important because a lack of wind data very quickly leads to errors in weather forecasting models," says Reitebuch. "These errors affect the accurate forecasting of the development of low-pressure systems, which often move towards Europe and, due to their high winds and heavy rainfall, have a significant effect on our daily lives."
- The DLR ADM (Atmospheric Dynamics Mission) research flight campaign over Iceland and Greenland is a DLR contribution to the ESA ADM-Aeolus mission. Involved in this mission are the DLR Institute of Atmospheric Physics, DLR Flight Experiments, ESA and the University of Leeds, which has a wind lidar installed at the summit station in Greenland for the mission to perform comparison measurements from the ground. This mission is being carried out in cooperation with NASA. For the first time in the world, four wind lidar instruments on two aircraft are being used at the same time.

Design and Setup of the ALADIN Airborne Demonstrator
The core of the A2D was based on the ALADIN receiver and transmitter from the pre-development program of ESA and was therefore representative of the actual satellite instrument. The optical receiver of the A2D was space qualified with respect to its thermal vacuum and vibration environment during the pre-development phase.
The A2D was a nonscanning lidar as the satellite instrument. Thus, only one LOS component of the three-dimensional wind vector is measured in contrast to most other direct-detection wind lidars, which are equipped with a scanning device. The LOS wind was measured perpendicular to the aircraft roll axis, with an off-nadir angle of 208. The A2D was designed to be operated on the DLR Falcon 20 aircraft, a twin-engine jet with a pressurized cabin allowing a maximum payload of 1.1 ton, a flight altitude of up to 12 km, and range of up to 3700 km.
The installation of the A2D inside the Falcon aircraft is shown in Figure 64 with the telescope, the mechanical aircraft frame, and the thermal hood of the receiver system. The mechanical frame holding the telescope, receiver, and laser was mounted via vibration-damping shock mounts to the seat rails of the aircraft. The mechanical frame of the 10.6 µm heterodyne wind infrared Doppler lidar, which has proven its aircraft vibration-damping behavior needed for coherent detection, was adapted to hold the A2D laser, optical receiver, and telescope.
The laser beam was directed toward the atmosphere via a window in the bottom fuselage of the aircraft cabin. The electronic units operating the A2D are installed in 19 inch aircraft racks and are controlled by two operators. The total volume of the system was 3 m3, the mass is 550 kg, and the mean power consumption was 2.5 kW. Finite element simulations were performed to minimize the overall weight, providing high stiffness for the transmit and receive optical path, and to prove airworthiness.
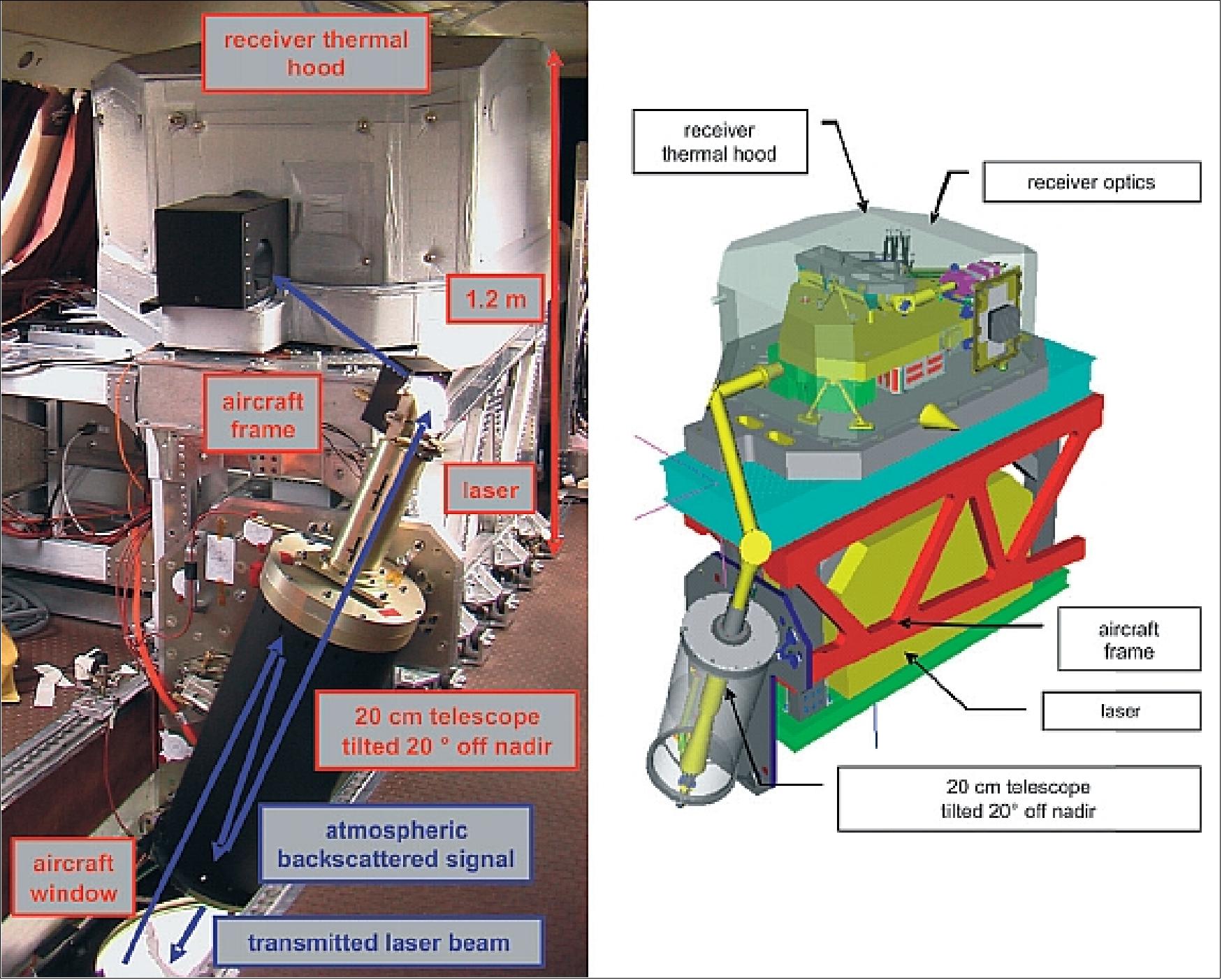
Optical design overview: The narrowband single-frequency laser pulses at 354.89 nm vacuum wavelength were generated by an Nd:YAG laser. The circularly polarized laser pulses were transmitted via three reflecting mirrors through the aircraft window (or one reflecting mirror in case of ground operation) toward the atmosphere. The last reflecting mirror was placed on the telescope optical axis and thus a coaxial transmit–receive system was obtained.
The backscattered photons from the atmosphere were collected by a 20 cm aperture Cassegrain telescope and directed to the optical receiver via an optical relay with two lenses and two mirrors. After passing the front optic with field and aperture stop, the light was directed toward the two spectrometers. The Rayleigh spectrometer used the double-edge technique with a sequential Fabry–Perot interferometer, whereas the Mie spectrometer was based on a Fizeau interferometer. For both the Rayleigh and the Mie spectrometer, an ACCD (Accumulation CCD) detector was used, and the electronic signal was digitized after preamplification. The sequential implementation of the Fabry–Perot interferometer and the ACCD are patented by Astrium.
The optical beam path with about 60 optical elements and the alignment sensitivities were studied in detail with an optical ray-tracing model. The principle layout of the A2D optical design is shown in Figure 67. The main instrument parameters for the satellite ALADIN and the A2D are summarized in Table 8.
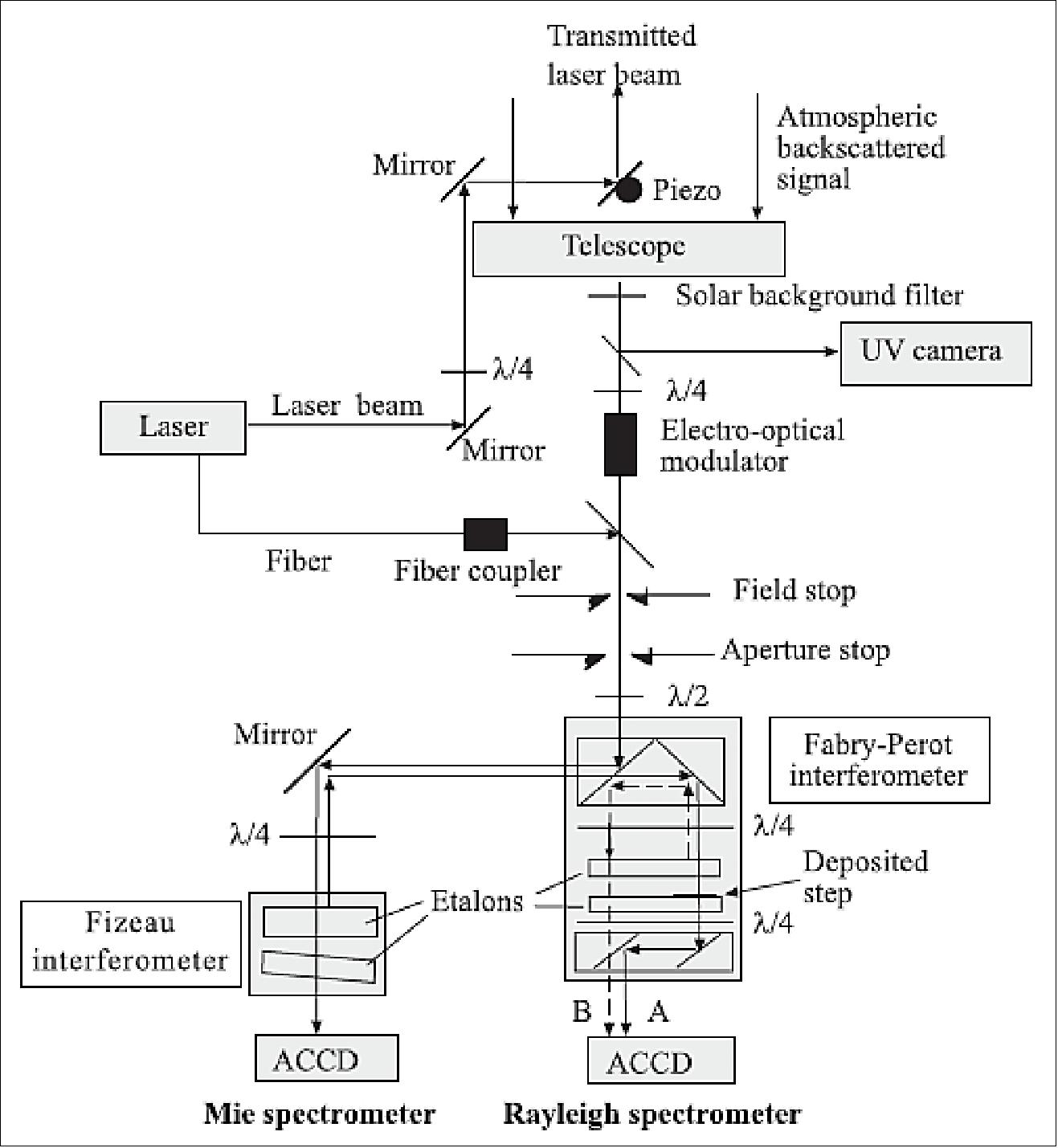
Parameter | ALADIN on Aeolus | A2D |
Platform | Satellite | Container or DLR Falcon aircraft |
Altitude | 320 km | Ground or 8–12 km flight altitude |
LOS pointing | 37.6º off nadir | 0º, 15–20º off zenith (ground) |
Minimum vertical resolution | 250 m for 2.1 µs at 37.6º off nadir | 315 m for 2.1 µs at 0º zenith |
Laser transmitter | Nd:YAG, frequency-tripled, diode-pumped | |
Wavelength | 354.9 nm | 354.89 nm |
Operation | Burst mode | Continuous |
Pulse repetition rate | 100 Hz | 50 Hz |
Energy per pulse | 129 mJ | 55–65 mJ |
Laser line width | < 50 MHz (FWHM) | 45 MHz (FWHM) |
Pulse-to-pulse frequency stability in the UV | < 4 MHz rms over 7 s | < 1.8 MHz rms over 14 s |
Laser divergence | 12 µrad | 80–90 µrad for ±3σ, 99.7% |
Laser beam diameter | 1.5 m | 16 mm (99.7%) |
Laser output polarization | Circular left | |
Laser internal reference path | Free path with aberration generator | Multi mode fiber with polarizer |
Telescope and receiver | Transceiver telescope; | Receiver Cassegrain telescope |
Telescope diameter | 1.5 m | 0.2 m |
Receiver FOV | 19 µrad | 100 µrad |
Background blocking filter bandwidth FWHM | 1 nm | 2.6 nm |
Mie spectrometer | Fringe-imaging Fizeau interferometer, 16 spectral channels | |
Rayleigh spectrometer | Double-edge Fabry–Perot interferometer, 2 filters, sequential | |
Detector | ACCD (Accumulation CCD), quantum efficiency 0.85 | |
Development Status of the Spacecraft and ALADIN
• August 16, 2018: Measuring 4.5 m across, this relatively small antenna in Australia, dubbed NNO-2, will be the first to hear from the soon-to-be-launched Aeolus satellite, the first ever to measure winds on Earth from Space. 89)
- Aeolus’ first steps after separation will include the automatic unfolding of its solar ‘wings’ and turning its antenna to face Earth to start sending signals. Only then will teams on the ground be able to get any sign from the satellite that all is well.
- Since 2015, NNO-2 has been pointing to space, listening for signals from rockets and newly launched satellites and transmitting instructions and commands to them from engineers on Earth.
• August 9, 2018: As preparations for the launch of ESA’s latest Earth Explorer continue on track, the team at Europe’s Spaceport in French Guiana had bid farewell to the Aeolus satellite as it was sealed from view in its Vega rocket fairing. Liftoff was set for 21 August at 21:20 GMT (23:20 CEST). 90)
- Since its arrival at the launch site in early July, Aeolus was thoroughly tested and fuelled with hydrazine.
- Like all of ESA’s Earth Explorer missions, Aeolus filled a gap in our knowledge of how our planet works and showed how novel technology could be used to observe Earth from space.

• August 2, 2018: With liftoff less than three weeks away, ESA’s Aeolus satellite had been fuelled and was almost ready to be sealed within its Vega rocket fairing. 91)

• July 24, 2018: The launch of Aeolus — ESA’s mission to map Earth’s wind in realtime — was getting close, with the satellite due for lift-off on 21 August from Europe’s Spaceport in Kourou, French Guiana. With the wind in their sails, mission teams are busily preparing this unique satellite for its upcoming journey. 92)
- Aeolus carried a sophisticated atmospheric laser Doppler instrument, dubbed ALADIN. Combining two powerful lasers, a large telescope and extremely sensitive receivers, it was one of the most advanced instruments ever put into orbit.
- Currently one of the biggest challenges in making accurate weather predictions is gathering enough information about Earth’s wind. Aeolus was the first-ever satellite to directly measure winds from space, at all altitudes, from Earth's surface through the troposphere and up 30 km to the stratosphere — providing information that significantly improved the quality of weather forecasts.
- Paolo Ferri, Head of Mission Operations at ESA adds, “The Aeolus mission will be a wonderful addition to our fleet of satellites that continually observe Earth bringing us incredible insights into our planet, in particular into the complex world of atmospheric dynamics and climate processes — systems that not only affect our everyday lives but also have huge consequences for our future.”
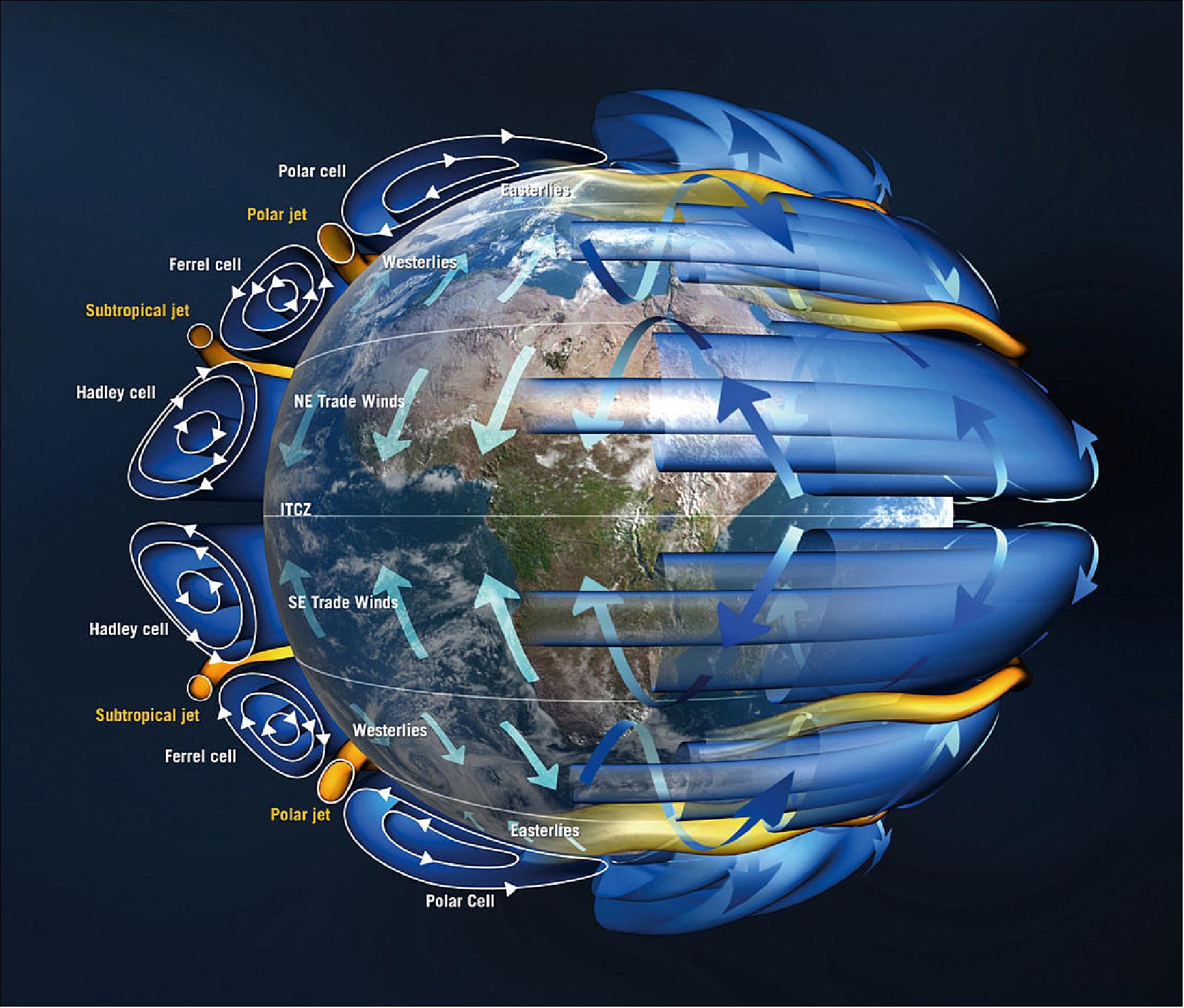
• July 10, 2018: With the campaign to launch ESA’s Aeolus wind satellite on 21 August well underway, the satellite’s telescope had been opened and inspected to make sure it was perfectly clean and shiny. 93)
- While Aeolus’ novel laser technology was arguably the sexy part of the instrument, its telescope, which measured around 1.5 m across, was pretty dominant and equally important. It was used to collect backscattered light from the atmosphere and direct it to the receiver. In short, the laser system generated a series of short pulses of ultraviolet light which were beamed down into the atmosphere. The telescope collected the light backscattered from particles of gas and dust in the atmosphere. The time between sending the light pulse and receiving the signal back determined the distance to the ‘scatterers’ and therefore the altitude above Earth. As the scattering particles were moving in the wind, the wavelength of the scattered light was shifted by a small amount as a function of speed. The Doppler wind lidar measured this change so that the velocity of the wind could be determined.
- It was clearly important to make sure that the instrument was absolutely spotless, so engineers at the launch site in Kourou had first turned to the telescope and given it a close inspection.
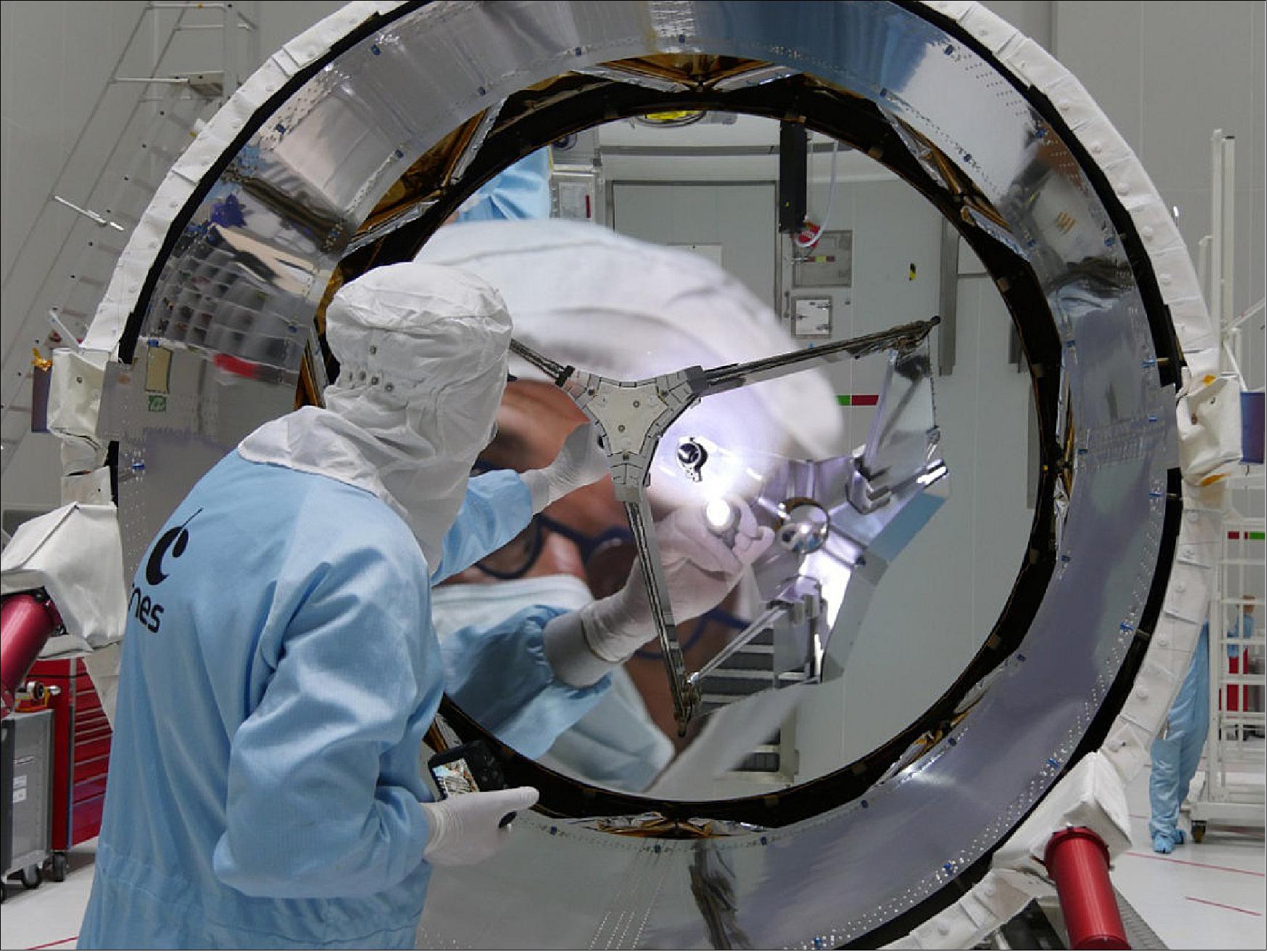
• July 6, 2018: Having set sail from France on 15 June - Global Wind Day, ESA’s Aeolus wind satellite arrived safe and sound at the launch site in French Guiana. - While almost all satellites travel by aircraft, Aeolus’ journey was rather different – it travelled all the way across the Atlantic from Saint Nazare, western France to the Port of Cayenne, French Guiana by ship. 94)
- Aeolus carried one of the most sophisticated instruments ever to be put into orbit. A 12-day journey was undertaken to avoid potential damage caused by air re-pressurization during descent had the satellite travelled by air – a quicker but decidedly riskier option.
- Upon its long-awaited arrival, the team unloaded Aeolus and its support equipment. The containers were then carefully positioned on a truck to be transported to the launch site about 60 km away, where the satellite container was moved into the airlock, to stabilize after its long journey.
- The satellite was then removed from its container, placed on its integration trolley for testing and connected to its electrical support equipment. Initial checks indicate that Aeolus has withstood its journey from France in good condition.
- ESA’s Aeolus project manager, Anders Elfving, said, “We are obviously all extremely pleased that Aeolus has now arrived at the launch site. An awful lot of work and planning went into making sure it arrived safe and sound – now it’s full steam ahead for preparing the satellite for liftoff on 21 August.”
- A range of checks were carried out on the satellite in the cleanroom before the scheduled liftoff on a Vega rocket on 21 August at 21:20 GMT (23:20 CEST) from Europe’s spaceport near Kourou.

• June 15, 2018: Today was Global Wind Day, which couldn’t have been more apt for ESA’s Aeolus wind satellite to begin its voyage to the launch site in French Guiana. And, while almost all satellites journey by aircraft, Aeolus was different, it travelled by ship. 95)
- Since the ALADIN instrument is sensitive to pressure change, ESA and Airbus Defence and Space engineers decided that the safest way for it to journey from France, where it had been going through testing, to French Guiana would be by ship.
- Denny Wernham, ESA’s Aeolus instrument expert, explains, “Going by ship may seem a little strange, after all it will take around 12 days to get there instead of a matter of hours, but if, for whatever reason, the aircraft had to descend rapidly and there was a sudden increase in air pressure, Aeolus’ instrument could be damaged."
- “It was designed, of course, to allow for the pressure drop during launch ascent so that it could be taken into orbit, but not for a fast descent. So basically, once it’s up, it’s up."
- “So, today we see our beloved satellite and all of its support equipment being loaded onto a ship in Saint Nazaire in western France and set forth across the Atlantic. And, indeed, it is kind of ironic: our high-tech wind satellite is travelling by a means that many years ago relied on the wind.”
- Aeolus had, without doubt, been a challenging satellite mission to develop. Nevertheless, this long-awaited mission was now set to not only improve our understanding of how the atmosphere works and contribute to climate change research, but has also helped to predict extreme events such as hurricanes. It has also helped to better understand and model large-scale wind patterns driving weather such as El Niño.


• June 5, 2018: Like all of the Earth Explorers, Aeolus was built to show how cutting-edge space technology can shed new light on the intricate workings of our planet. This pioneering satellite used powerful laser technology that probes the lowermost 30 km of our atmosphere to yield vertical profiles of the wind as well as information on aerosols and clouds. This not only improved our understanding of how the atmosphere works and contributed to climate change research, but also helped to predict extreme events such as hurricanes and El Niño. 97)
• February 7, 2018: ESA’s Aeolus satellite was particularly tricky to build. One of the main stumbling blocks was getting its lasers to work in a vacuum, but recent tests on the satellite showed that the vacuum or temperature of space wouldn't have gotten in the way of Aeolus measuring Earth’s winds. 98)
- The ALADIN instrument shot pulses of ultraviolet light down into the atmosphere and measured the backscattered signals from molecules and aerosols to profile the world’s winds.
- “This will be the first time that we will be able to directly measure profiles of the global wind field from space in cloud-free conditions. It has been a major challenge for us all – our ESA engineers, industry, our Member States – to overcome many technical and programmatic challenges. I am grateful to everyone for having gone through this and for having trust in ESA to finally make it happen. We are now very close to seeing the fruits of a long endeavor,” said Josef Aschbacher, ESA’s Director of Earth Observation Programs.
- These vertical slices through the atmosphere, along with information on aerosols and clouds, advanced our knowledge of atmospheric dynamics and contributed to climate research.
- Since Aeolus delivered measurements almost in realtime, it was also set to provide much-needed information to improve daily weather forecasts.
- The satellite’s novel technology was under development for some years, but issues with the laser component of the instrument and with the optics, which have to survive exposure to the high-intensity laser pulses, were eventually resolved, and in 2016 the instrument was finally ready.
- ALADIN was then added to the satellite in the UK, after which the assembly was moved to France where it was shaken to simulate the rigors of liftoff.
- The last round of tests was carried out in CSL (Centre Spatial de Liège), Belgium, and involved putting the satellite in a thermal–vacuum chamber for almost two months (Figure 74).
- Once the satellite was safely inside, the air was pumped out and the chamber cooled by liquid nitrogen to simulate the environment of space – and then Aeolus was put through its paces.
- ESA’s Aeolus project manager, Anders Elfving, said, “The test was exceptionally complex, not only because it was a tight fit with the satellite filling up most of the space in the chamber, but also because we had to make sure that the whole instrument’s performance is tip-top. It was an extremely technical and delicate undertaking that included firing ALADIN’s lasers at full power. The satellite as a whole came through with flying colors, and we are particularly pleased that the two laser transmitters performed brilliantly.”
- With this milestone behind it, Aeolus was returned to France where it had a few final tests before being shipped across the Atlantic to Europe’s Spaceport in French Guiana for launch on a Vega rocket in the autumn.
- ALADIN was built by Airbus SAS in Toulouse, France, the satellite by Airbus Ltd. in Stevenage, UK, and the laser transmitters by Leonardo SpA in Florence and Pomezia, Italy.

• November 2, 2017: With liftoff on the horizon, ESA’s Aeolus satellite was going through its last round of tests to make sure that this complex mission was going to work in orbit. Over the following month, it was sitting in a large chamber that had all the air sucked out to simulate the vacuum of space. 99)
- With these difficulties in the past, the satellite is now undergoing final testing in Belgium before it is shipped to French Guiana for liftoff, which is scheduled for the middle of next year.
- After having spent this spring at Airbus Defence and Space in Toulouse, France, where it was checked that it could withstand the vibration and noise liftoff and its ride into space, Aeolus was at the Centre Spatial de Liège since May. - There, it had just been enclosed in the thermal–vacuum chamber for the next 30 days or so.
- With the satellite safely inside, the chamber door was closed a few days later and the air was pumped out to create a vacuum.
- Denny Wernham, ESA’s Aladin instrument manager, said, “It takes some time for the air and outgassing from the satellite to be pumped out of the chamber, but Aeolus finally faced ‘hard vacuum’ on 31 October."
- “Tests are scheduled to run continuously over the next 33 days. We are particularly keen to see how well the laser transmits its pulses of ultraviolet light and the alignment of the instrument in this environment."
- Once these tests were done, the satellite was transported back to Toulouse for final checks before being shipped across the Atlantic to Europe’s Spaceport in French Guiana for launch on a Vega rocket.
• January 30, 2017: The road to realizing ESA’s Aeolus mission may have been long and bumpy, but developing novel space technology is, by its very nature, challenging. With the satellite equipped with its revolutionary instrument, the path ahead was much smoother as it headed to France to begin the last round of tests before being shipped to the launch site at the end of 2017. 100)
- Aeolus carried one of the most sophisticated instruments ever to be put into orbit: ALADIN, with two powerful lasers, a large telescope and very sensitive receivers. It shot pulses of ultraviolet light down into the atmosphere to profile the world’s winds. This was a completely new approach to measuring the wind from space, which usually involved tracking cloud movement, measuring the roughness of the sea surface or inferring wind from temperature readings.
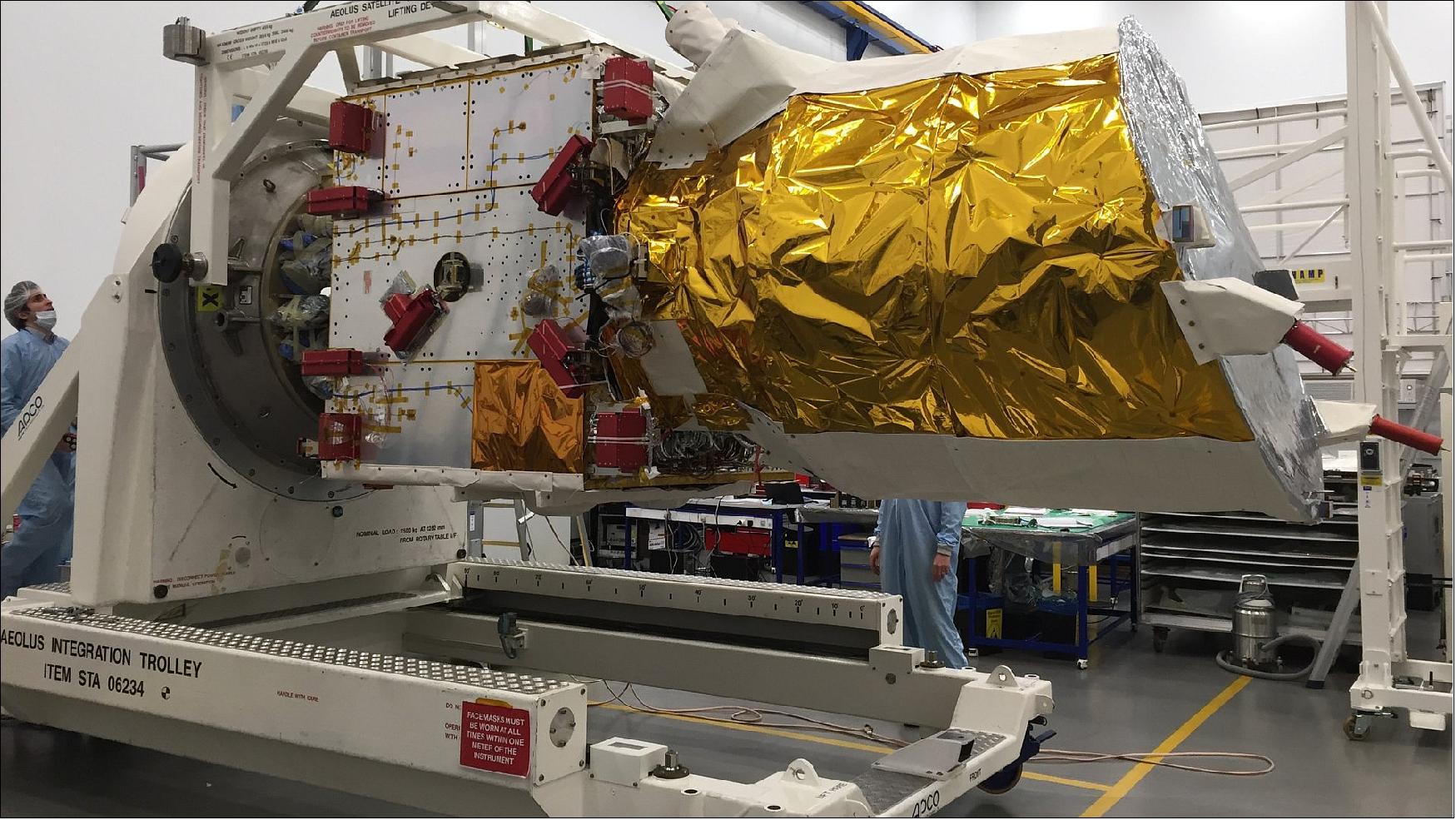

Legend to Figure 76:
The ADM-Aeolus mission did not only advance our understanding of atmospheric dynamics, but also provided much-needed information to improve weather forecasts.
The satellite carried the first wind lidar in space, which could probe the lowermost 30 km of the atmosphere to provide profiles of wind, aerosols and clouds along the satellite’s orbital path.
The laser system emitted short powerful pulses of ultraviolet light down into the atmosphere. The telescope collected the light that was backscattered from air molecules, particles of dust and droplets of water.
The receiver analysed the Doppler shift of the backscattered signal to determine the speed and direction of the wind at various altitudes below the satellite.
These near-realtime observations improved the accuracy of numerical weather and climate prediction and advanced our understanding of atmospheric dynamics and processes relevant to climate variability.
- Aeolus was built mainly to advance our understanding of Earth. These vertical slices through the atmosphere, along with information on aerosols and clouds, advanced our knowledge of atmospheric dynamics and contribute to climate research. - However, Aeolus also had a very important practical role to play because its measurements were delivered rapidly, improving weather forecasts. After its long development, ALADIN was finally ready to join the satellite at Airbus Defence and Space in Stevenage in the UK in August last year.
- With the satellite complete, it was time move it to Toulouse where it would have been tested to make sure that it can withstand the vibration and noise of liftoff. — After this, ADM-Aeolus was going to Liege in Belgium to be checked in a thermal–vacuum chamber.
• August 2, 2016: After many years in development, ALADIN – the Doppler wind lidar to be carried on the Aeolus satellite – was ready to be shipped from Toulouse, France, to the UK to be installed on the satellite in preparation for liftoff by the end of 2017. Aeolus was the first satellite mission to probe the wind globally. These vertical slices through the atmosphere, along with information on aerosols and clouds, were going to advance our knowledge of atmospheric dynamics and contributed to climate research. 101)
- Its state-of-the art ALADIN instrument incorporated two powerful lasers, a large telescope and very sensitive receivers. The laser generated ultraviolet light that was beamed towards Earth. This light bounced off air molecules and small particles such as dust, ice and droplets of water in the atmosphere. The fraction of light that was scattered back towards the satellite was collected by ALADIN’s telescope and measured.
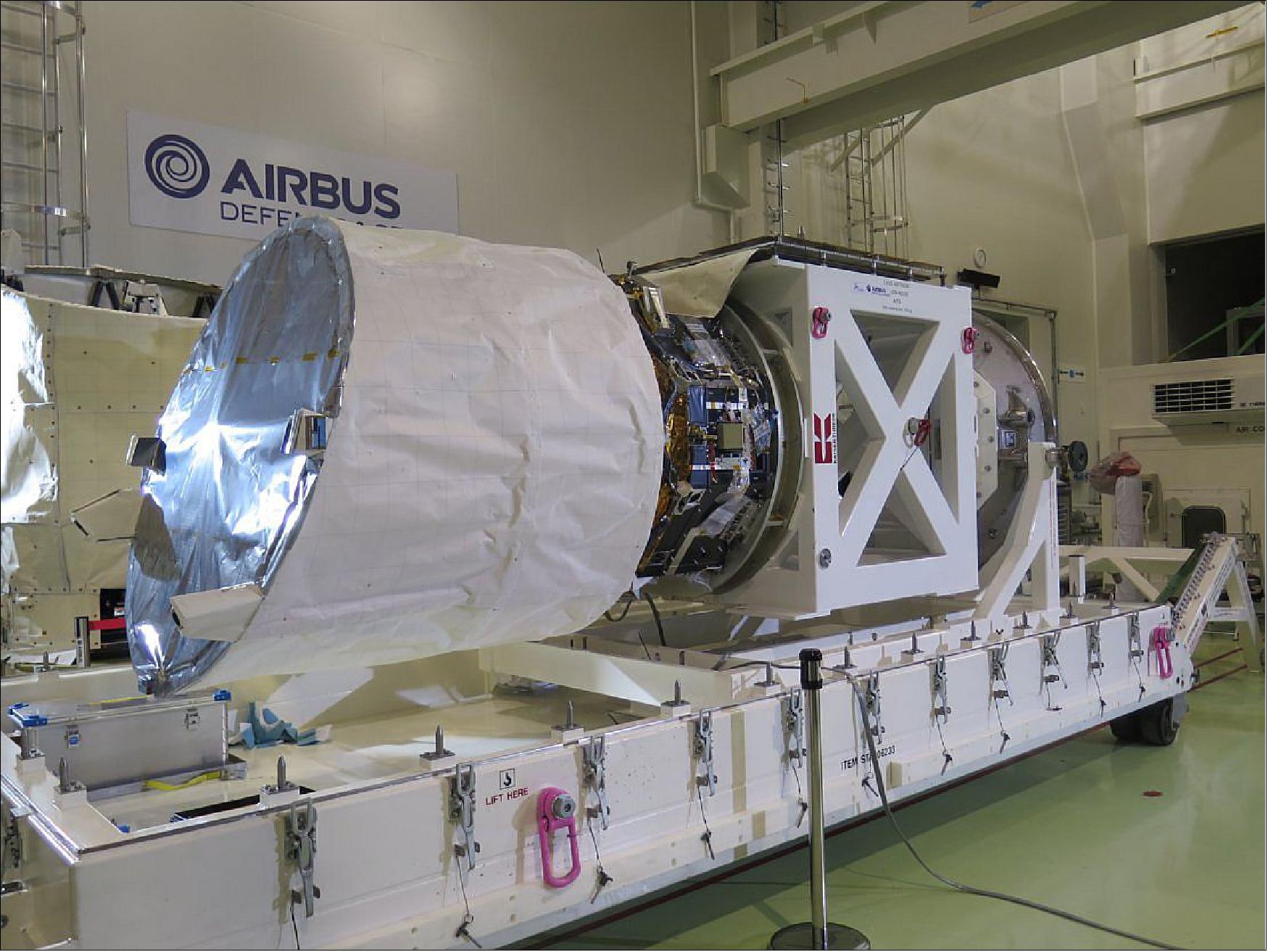
• 2016: The ALADIN instrument was fully integrated and both laser transmitters were aligned for optimal performance. The In-situ Cleaning Subsystem was tested together with the latest satellite flight software. The satellite platform was finalized and checked out in preparation for mating with the ALADIN PLM. The Payload Data Ground Segment facilities were being prepared and undergoing tests. The Flight Operations Segment facilities was also being readied. 102)
• April 22. 2015: A lot of time has gone into developing the technology involved and testing both lasers. Despite numerous setbacks, in particular issues associated with them working properly in a vacuum, engineers at Selex-ES in Italy persevered. Thanks to their dedication and ingenuity, a major milestone for the mission had been achieved. Both lasers had then been delivered to Airbus Defence and Space in Toulouse, France, ready to be integrated into the rest of ALADIN. 103)
- Despite a number of setbacks, this cutting-edge piece of technology is now ready to be integrated into the rest of the satellite’s instrument – a Doppler wind lidar called ALADIN. — ADM-Aeolus will provide profiles of the world’s winds as well as information on aerosols and clouds. These profiles will not only advance our understanding of atmospheric dynamics, but will also offer much-needed information to improve weather forecasts.
- Thanks to these collective efforts, the project can now focus on the instrument and satellite integration and testing. This means a launch of ADM-Aeolus spacecraft can be done in 2016.
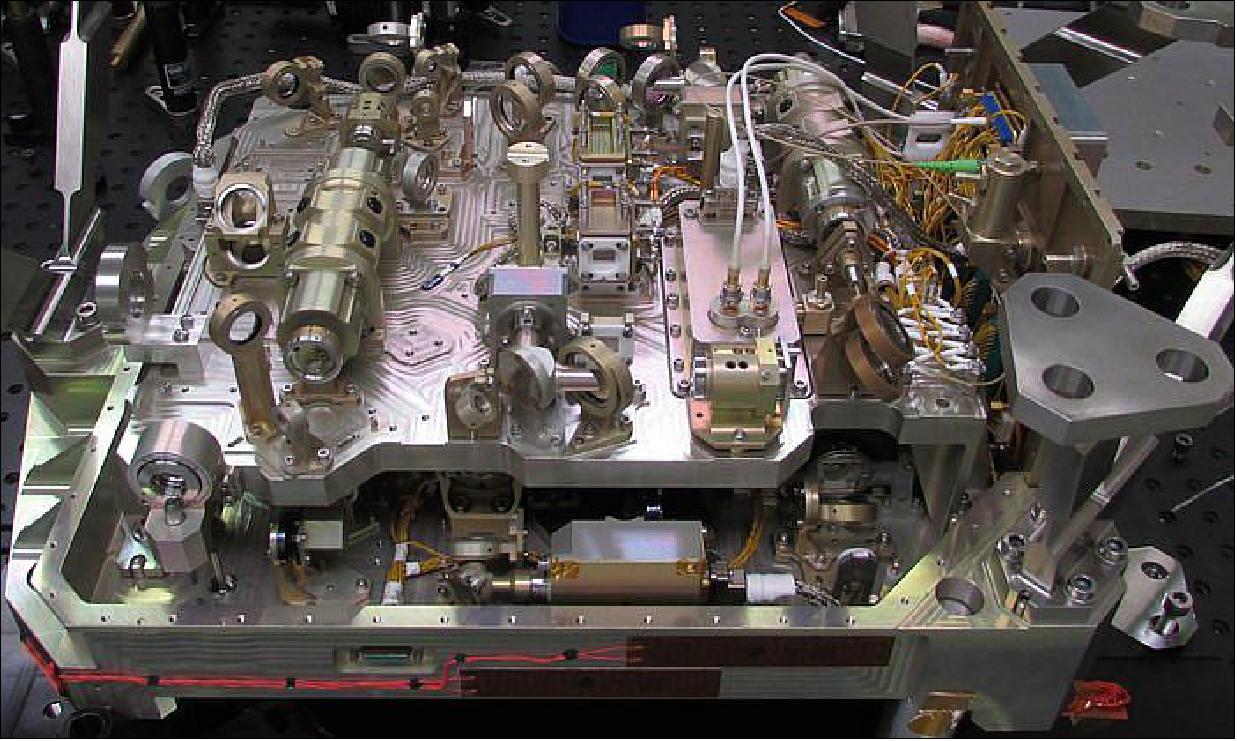
References
1) A. Heliere, E. Armandillo, Y. Durand, A. Culoma, R. Meynart, “Lidar Instruments for ESA Earth Observation Missions,” Proceedings of 22nd ILRC (International Laser Radar Conference), Matera, Italy, July 12-16, 2004, ESA SP-561, Vol. I, pp. 11-14
2) M. Endemann, P. Dubock, P. Ingmann, R. Wimmer, D. Morancais, D. Demuth, “The ADM-Aeolus Mission - the first wind-lidar in space,” Proceedings of 22nd ILRC (International Laser Radar Conference), Matera, Italy, July 12-16, 2004, ESA SP-561, Vol. II, pp. 953-956
3) P. Ingmann, J. Fuchs, J. Pailleux, A. Stoffelen, “The Atmospheric Dynamics Mission,” ESA Earth Observation Quarterly, No 66, July 2000, pp. 12-17
4) “Atmospheric Dynamics Mission,” ESA publication SP-1233 (4), July 1999
5) A. G. Straume-Lindner, P. Ingmann, M. Endemann, “Status of the Doppler Wind Lidar Profiling Mission ADM-Aeolus,” Proceedings of the 8th International Winds Workshop, Beijing, China, April 24-28, 2006, URL: http://www.eumetsat.int/groups/cps/documents/document/pdf_conf_p47_s5_01_straume_v.pdf
6) R. Wimmer, S. Willis, D. Morancais, F. Fabre, D. Demuth, “The ADM-Aeolus Mission - the first wind-lidar in space,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B1.2.08
7) Y. Durand, “Assessment Test Programme for the ALADIN Pump Laser Diodes,” 2nd ESA-NASA Working Meeting on Optoelectronics: Qualification of Technologies and Lessons Learned from Satellite LIDAR and Altimeter Missions,” June 21-22, 2006, ESA/ESTEC, Noordwijk, The Netherlands
8) A. G. Straume-Lindner, P. Ingmann, the members of the Aeolus Mission Advisory Group, “ADM-Aeolus: The First Space-Based High Spectral Resolution Doppler Wind Lidar,” Proceedings of IGARSS 2007 (International Geoscience and Remote Sensing Symposium), Barcelona, Spain, July 23-27, 2007
9) ADM-Aeolus Brochure, BR-236, Feb.2005, http://www.esa.int/esapub/br/br236/br236.pdf
10) D. Morançais, F. Fabre, M. Schillinger, Jean-Claude Barthès, M. Endemann, A. Culoma, Y. Durand, “ALADIN: The First European Lidar in Space,” Proceedings of the 5th International Conference on Space Optics, March 30 - April 2, 2004 ,Toulouse, France
11) “ADM-Aeolus Science Report,” ESA, SP-1311, April 2008, URL: http://esamultimedia.esa.int/docs/SP-1311_ADM-Aeolus_FINAL_low-res.pdf
12) K. Adamson, P. Bargellini, T. Nogueira, H. Nett, C. Caspar, “ADM-Aeolus: Mission Planning, Re-use Autonomy and Automation,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-1968
13) Anne Grete Straume, Paul Ingmann, Tobias Wehr, “ESA's Spaceborne Lidar Missions: Candidate and Selected Concepts for Wind, Aerosols and CO2 Monitoring,” Proceedings of the 26th International Laser Radar Conference (ILRC 26), Porto Heli, Peloponnesus, Greece, June 25-29, 2012
14) A M. Prezzavento, M Neal, “Aeolus AOCS Performance and Functional Validation,” roceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
15) I. Vieira, C. Félix, C. Borda, C. Pepe, D. Temperanza, G. Furano, J. Edwards, Aeolus Magnetometer for Attitude Determination,” Proceedings of the 7th International ESA Conference on Guidance, Navigation & Control Systems (GNC 2008), June 2-5, 2008, Tralee, County Kerry, Ireland
16) S. Riva, E. Ferrando, R. Contini, R. Blok, R. vd Heijden, A. Caon, G. Labruyere, G. Strobl, W. Köestler, W. Zimmermann, “The ADM Aeolus Solar Array,” Proceedings of the 8th European Space Power Conference, Constance, Germany, Sept. 14-19, 2008, ESA SP-661, Sept. 2008
17) D. Pecover, “Functional Verification Of the ADM-AEOLUS Autonomy Requirements,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2013
18) P. Bargellini, P. P. Emanuelli, S. Mejnertsen, R. Gessner, David Pecover, “ADM-Aeolus: an Innovative Operations Concept,” Proceedings of the SpaceOps 2006 Conference, Rome, Italy, June 19-23, 2006, paper: AIAA 2006-5506
19) http://www.esa.int/esaLP/LPadmaeolus.html
20) “The ADM-Aeolus Workshop Summary,” Sept. 26-28, 2006, ESA/ESTEC, Noordwijk, The Netherlands, http://esamultimedia.esa.int/docs/ADM-Aeolus_Workshop_Summary.pdf
21) M. Endemann, “The Aeolus Mission,” The 2nd ESA-NASA Working Meeting on Optoelectronics: Qualification of Technologies and Lessons Learned from Satellite LIDAR and Altimeter Missions,” June 21-22, 2006, ESA/ESTEC, URL: https://escies.org/webdocument/showArticle?id=356&groupid=6
22) Phil McGoldrick, Richard Wimmer, Steven Willis, Didier Morancais, Frederic Fabre, Dietmar Demuth, “The ADM-Aeolus Mission – the first wind-lidar in space,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B1.I.8
23) ”ESA’s Aeolus wind satellite launched,” ESA, 23 August 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/ESA_s_Aeolus_wind_satellite_launched
24) Stephen Clark, ”Launch Schedule,” Spaceflight Now, 4 June 2018, URL: https://spaceflightnow.com/launch-schedule/
25) ”Vega to launch ESA’s wind mission,” ESA, September 7, 2016, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/ADM-Aeolus/Vega_to_launch_ESA_s_wind_mission
26) ”ADM-Aeolus operations,” ESA, April 6, 2016, URL: http://www.esa.int/Our_Activities/Operations/ADM-Aeolus_operations
27) Peter B. de Selding, “Cost, Schedule Woes on 2 Lidar Missions Push ESA To Change Contract Procedures,” Space News, May 22, 2015, URL: http://spacenews.com/cost-schedule-woes-on-2-lidar-missions-push-esa-to-change-contract-procedures/
28) “ADM-Aeolus,” ESA Bulletin No 144, Nov. 2010, pp. 74-75
29) “ADM-Aeolus mission overview,” ESA, Nov. 4, 2010, URL: http://www.esa.int/export/esaLP/ESAEPG2VMOC_LPadmaeolus_0.html
30) T. Wehr, P. Ingmann, A.G. Straume, A. Elfving, M. Eisinger, D. Lajas, A. Lefebvre, T. Fehr, “ADM-Aeolus and EarthCARE - ESA’s Earth Observation Lidar Missions,” Second GALION Workshop, WMO Headquarters, Geneva, Switzerland, 20-23 September 2010
31) ”Keeper of the winds shines on,” ESA Applications, 26 April 2022, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Aeolus/Keeper_of_the_winds_shines_on
32) ”Aeolus paves the way for future wind lidars in space,” ESA Applications, 14 December 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Aeolus/Aeolus_paves_the_way_for_future_wind_lidars_in_space
33) N. Žagar, M. Rennie, L. Isaksen, ”Uncertainties in Kelvin Waves in ECMWF Analyses and Forecasts: Insights From Aeolus Observing System Experiments,” Geophysical Research Letters, Volume48, Issue22, 28 November 2021, e2021GL094716, First published: 06 November 2021, https://doi.org/10.1029/2021GL094716, URL: https://agupubs.onlinelibrary.wiley.com/doi/epdf/10.1029/2021GL094716
34) ”Joining forces for Aeolus,” ESA Applications, 20 September 2021: URL: https://www.esa.int/Applications/Observing_the_Earth/Aeolus/Joining_forces_for_Aeolus
35) ”Aeolus shines a light on polar vortex,” ESA Applications, 04 February 2021, URL: https://www.esa.int/Applications/Observing_the_Earth/Aeolus/Aeolus_shines_a_light_on_polar_vortex
36) New Antarctic ground station for Aeolus increases data flow,” ESA Applications, 12 May 2020, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_11-15_May_2020
37) ”Aeolus goes public,” ESA / Applications / Observing the Earth / Aeolus, 12 May 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Aeolus/Aeolus_goes_public
38) ”COVID-19: Aeolus and weather forecasts,” ESA / Applications / Observing the Earth / Aeolus, 21 April 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Aeolus/COVID-19_Aeolus_and_weather_forecasts
39) ”Aeolus winds now in daily weather forecasts,” ESA / Applications / Observing the Earth / Aeolus, 10 January 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Aeolus/Aeolus_winds_now_in_daily_weather_forecasts
40) ”Aeolus improves weather forecasts,” ESA Applications, 10 January 2020, URL: http://www.esa.int/Applications/Observing_the_Earth/Aeolus/Aeolus_winds_now_in_daily_weather_forecasts
41) ”Improving new Aeolus wind data for forecasts,” ESA / Applications / Observing the Earth / Aeolus, 12 November 2019, URL: http://www.esa.int/Applications/Observing_the_Earth/Aeolus/Improving_new_Aeolus_wind_data_for_forecasts
42) Danilo Muzi, Anne Grete Straume, Denny Wernham, Anders Elfving, Alain Lefebvre, Michael Fehringer, ”Aeolus and the future Earth Explorer Missions of the European Space Agency,” Proceedings of the 70th IAC (International Astronautical Congress), Washington DC, USA, 21-25 October 2019, paper: IAC-19-B 1.2.2, URL: https://iafastro.directory/iac/proceedings/IAC-19/IAC-19/B1/2/manuscripts/IAC-19,B1,2,2,x49779.pdf
43) ”ESA spacecraft dodges large constellation,” ESA, 3 September 2019, URL: http://www.esa.int/Our_Activities/Space_Safety/ESA_spacecraft_dodges_large_constellation
44) ”Second laser boosts Aeolus power,” ESA, 23 July 2019, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Second_laser_boosts_Aeolus_power
45) ”Aeolus well on the way to improving forecasts,” ESA, 5 April 2019, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Aeolus_well_on_the_way_to_improving_forecasts
46) ”Taking Aeolus to the next level,” ESA,
47) ”Flying under Aeolus,” ESA, 7 February 2019, URL: http://m.esa.int/spaceinvideos/Videos/2019/02/Flying_under_Aeolus
48) ”Aeolus wows with first wind data,” ESA, 12 September 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Aeolus_wows_with_first_wind_data
49) ”Aeolus laser shines light on wind,” ESA, 5 September 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Aeolus_laser_shines_light_on_wind
50) ”Wind mission ready for next phase,” ESA, 24 August 2018, URL: http://m.esa.int/Our_Activities/Operations/Wind_mission_ready_for_next_phase
51) “New findings benefit future lidar missions,” ESA General Studies Program, Feb. 10, 2010, URL: http://www.esa.int/SPECIALS/GSP/SEMJ8RVJ15G_0.html
52) W. Ubachs, E.-J. van Duijn, M. O. Vieitez, W. Van de Water, N. Dam, J. J. ter Meulen, A. S. Meijer, J. de Kloe, A. Stoffelen, E. A. A. Aben, “A spontaneous Rayleigh-Brillouin scattering experiment for the characterization of atmospheric ladar backscatter,” Executive Summary, ESA - AO/1-5467/07/NL/HE, URL: http://esamultimedia.esa.int/docs/gsp/completed/C21396ExS.pdf
53) D. Morancais, “ALADIN Instrument: Key Issues & Technical Challenges,” 2nd ESA-NASA Working Meeting on Optoelectronics: Qualification of Technologies and Lessons Learned from Satellite LIDAR and Altimeter Missions,” June 21-22, 2006, ESA/ESTEC, Noordwijk, The Netherlands
54) M. Endemann, A. Cosentino, “Transmitter Laser Design for ALADIN,” 2nd ESA-NASA Working Meeting on Optoelectronics: Qualification of Technologies and Lessons Learned from Satellite LIDAR and Altimeter Missions,” June 21-22, 2006, ESA/ESTEC, Noordwijk, The Netherlands
55) D. Morancais, F. Fabre, M. Schillinger, J.-C. Barthes, M. Endemann, A. Culoma, “ALADIN: The First European Lidar in Space,” Proceedings of 22nd ILRC (International Laser Radar Conference), Matera, Italy, July 12-16, 2004, ESA SP-561, Vol. I, pp. 127-129
56) Y. Durand, R. Meynart, D. Morancais, F. Fabre, M. Schillinger, “Results of the Pre-Development of ALADIN, the Direct Detection Doppler Wind Lidar for ADM/Aeolus,” Proceedings of 22nd ILRC (International Laser Radar Conference), Matera, Italy, July 12-16, 2004, ESA SP-561, Vol. I, pp. 247-250
57) F. Fabre, A. Heliere, et al., “Direct Detection Doppler Wind Lidar Prototype: Design and Preliminary Results,” Proceedings of the 2000 EUMETSAT Meteorological Satellite Data Users' Conference, Bologna, Italy, May 29-June 2, 2000, pp. 239-242
58) D. Morancais, F. Fabre, “Incoherent Doppler Wind Lidar ADM Concept and Related Prototype,” Proceedings of the EUMETSAT Meteorological Satellite Data User's Conference, Copenhagen, Denmark, Sept. 6-10, 1999, pp. 85-92
59) M. Schillinger, D. Morancais, F. Fabre, A. Culoma, “ALADIN: the LIDAR instrument for the AEOLUS mission,” Proceedings of SPIE, Vol. 4881, Crete, Greece, Sept. 23-27, 2002
60) A. Stoffelen, J. Pailleux, E. Källén, J. M. Vaughan, L. Isaksen, P. Flamant, W. Wergen, E. Andersson, H. Schyberg, A. Culoma, R. Meynart, M. Endemann, P. Ingmann, “The Atmospheric Dynamics Mission for Global Wind Field Measurement,” BAMS (Bulletin of the American Meteorological Society), Vol. 86, No 1, Jan. 2005, pp. 73-87, URL: http://journals.ametsoc.org/doi/pdf/10.1175/BAMS-86-1-73
61) D. Logut, J. Breysse, Y. Toulemont, M. Bougoin, “Light weight monolithic silicon carbide telescope for space application,” Building European OLED Infrastructure, Edited by Thomas P. Pearsall, Jonathan Halls, Proceedings of the SPIE, Vol. 5962, Sept. 12-16, 2005, Jena, Germany, pp. 521-532
62) D. Morancais, “The ALADIN Payload,” http://esamultimedia.esa.int/docs/2-3_Morancais.pdf
63) “Critical laser components stand the test of time for ESA's wind mission Aeolus,” ESA, June 6, 2007, URL: http://www.esa.int/esaLP/SEMQT7ARR1F_LPadmaeolus_0.html
64) T. Trautmann, “The Future ESA Earth Explorer Core Mission ADM-Aeolus: Wind MeasurementsfromSpace,” EXTROP Meeting, DLR-OP, March28-29, 2007, URL: http://www.extrop.zmaw.de/events/report2006/EXTROP-29Mar2007-Trautmann.pdf
65) Laurent Francou, Elisabetta Rugi Grond, Steffen Blum, Christoph Voland, “Optical Analysis and Performance Verification on ALADIN Spectrometers,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.congrexprojects.com/icso/2008-proceedings-ppts
66) Olivier Le Rille, Anne-Grete Straume, Maria Ofelia Vieitez, Wim Ubachs, Willem van de Water, Benjamin Witschas, Oliver Reitebuch, Gert-Jan Marseille, Jos de Kloe, Ad Stoffelen, Karim Houchi, Heiner Körnich, Harald Schyberg, “ESA's Wind Lidar Mission ADM-Aeolus: On-going scientific activities related to calibration, Retrieval and instrument operation,” Proceedings of the ILRC25 (25th International Laser Radar Conference), St. Petersburg, Russia, July 5-9, 2010, pp. 1237-1240
67) Olivier LeRille, Martin Endemann, Alain Culoma, Denny Wernham, “ADM-Aeolus: ESA'S High Spectral Resolution Doppler Wind Lidar Mission Recent Achievements and Future Prospects” Proceedings of the 26th International Laser Radar Conference (ILRC 26), Porto Heli, Peloponnesus, Greece, June 25-29, 2012
68) A. Dehn, A.G. Straume, A. Elfving, F. de Bruin, T. Kanitz, D. Wernham, D. Schuettemeyer, F. Buscaglione, W. Lengert, ”ADM-Aeolus ESA’s Wind Lidar Mission and its spin-off aerosol profile products,” ATMOS Conference 2015, Heraklion, Crete, Greece, June 8-12, 2015, URL: http://seom.esa.int/atmos2015/files/presentation244.pdf
69) Frank Heine, Hanno Scheife, Robert Lange, Klaus Schieber, Steve Windisch, Berry Smutny, “Frequency-Stable SEED Laser for the Aeolus Mission,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008, URL: http://www.congrexprojects.com/icso/2008-proceedings-ppts
70) H. Mosebach, E. Schmidt, M. Erdmann, F. Camus, “The ALADIN Transmit-Receive Optics (TRO) for the Spaceborne ADM-Aeolus Wind Lidar Mission,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-B.3.04
71) Adrian P. Tighe, Denny Wernham, Federico Pettazzi, Jorge Alves, Dominique Thibault, Fabio Era, Mike Entwistle, “The ADM-Aeolus ALADIN Laser and Oxygen Cleaning System: Challenges for Materials Selection and Contamination Control,” Proceedings of ISMSE-12 (12th International Symposium on Materials in the Space Environment), ESA/ESTEC, Noordwijk, The Netherlands, Sept. 24-28, 2012, SP-705
72) http://www.esa.int/SPECIALS/Operations/SEMUW4SVYVE_0.html
73) K. Adamson, P. Bargellini, T. Nogueira, H. Nett, C. Caspar, “ADM-Aeolus: Mission Planning Re-use, Autonomy and Automation,” Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-1968
74) David, Tan, L. Isaksen, J. de Kloe, G.-J. Marseille, A. Stoffelen, A. Debas, C. Desportes, C. Payan, P. Poli, D. Huber, O. Reitebuch, P. Flamant, O. Le Rille, H. Nett, A.G. Straume, Preparing the ECMWF Forecast System for ADM- Aeolus Doppler Wind Lidar Data,” URL: http://www.cawcr.gov.au/staff/pxs/wmoda5/Poster/Tan.pdf
75) Oliver Reitebuch, Martin Endemann, Paul Ingmann, Herbert Nett, “The Wind Lidar Mission ADM-Aeolus: Recent Science Activities and Status of Instrument Development,” LWG Meeting, Monterey, CA, USA, Feb. 5, 2008, URL: http://www.pa.op.dlr.de/aeolus/Campaigns_Pub/Reitebuch1_ADM_Feb08.pdf
76) Herbert Nett, “The Aeolus Ground Segment,” ADM-Aeolus Workshop, ESA-ESTEC, Noordwijk/NL, 26-28 September 2006, URL: http://esamultimedia.esa.int/docs/2-4_Nett.pdf
77) A.-G. Straume-Lindner, P. Ingmann, M. Endemann, and the ADM-Aeolus Team, “ADM-Aeolus - ESA's Spaceborne Wind Profiling Lidar,” Proceedings of the Joint 2007 EUMETSAT Meteorological Satellite Conference and the 15th Satellite Meteorology & Oceanography Conference of the American Meteorological Society, Amsterdam, The Netherlands, Sept. 24-28, 2007
78) O. Reitebuch, “ADM-Aeolus pre-launch campaigns with an airborne instrument demonstrator,” ADM-Aeolus Workshop, ESA/ESTEC, Noordwijk, The Netherlands, Sept. 26-28, 2006, URL: http://esamultimedia.esa.int/docs/6-2_Reitebuch.pdf
79) http://www.esa.int/esaLP/SEMM45ULWFE_LPadmaeolus_0.html
80) Y. Durand, R. Meynart, M. Endemann, E. Chinal, D. Morançais, T. Schröder, O. Reitebuch, “Manufacturing of an airborne demonstrator of ALADIN: the direct detection Doppler wind lidar for ADM-Aeolus,” Lidar Technologies, Techniques, and Measurements for Atmospheric Remote Sensing. Edited by Singh, Upendra N. Proceedings of the SPIE, Vol. 5984, 2005, pp. 1-14
81) Y. Durand, E. Chinal, M. Endemann, R. Meynart, O. Reitebuch, R. Treichel, “ALADIN airborne demonstrator: a Doppler Wind lidar to prepare ESA's ADM-Aeolus Explorer mission,” Earth Observing Systems XI, James J. Butler, Jack Xiong, Editors, Proceedings of SPIE, Vol. 6296, 2006
82) http://www.pa.op.dlr.de/aeolus/
83) Paul Ingmann, Anne Grete Straume, Herbert Nett, Oliver Reitebuch, “ADM-Aeolus – Progressing Towards Mission Exploitation,” 9th International Winds Workshop, Annapolis, MD, USA, April 14-18, 2008, URL: http://cimss.ssec.wisc.edu/iwwg/workshop9/ext_abstracts/1.%20Ingmann_ADM-AEOLUS-Progressing%20towards%20mission%20exploitation.pdf
84) Oliver Reitebuch, Christian Lemmerz, Engelbert Nagel, Ulrike Paffrath, Yannig Durand, Martin Endemann, Frederic Fabre, Marc Chaloupy, “The Airborne Demonstrator for the Direct-Detection Doppler Wind Lidar ALADIN on ADM-Aeolus. Part I: Instrument Design and Comparison to Satellite Instrument,” Journal of Atmospheric and Oceanic Technology, Vol. 26, December 2009, pp. 2501-2515, URL: http://elib.dlr.de/61049/1/paff-1.pdf
85) “DLR carries out mountain campaign for Aeolus,” ESA, Aug. 26, 2009, URL: http://www.esa.int/esaLP/SEM6IKH7KYF_LPadmaeolus_0.html
86) “DLR conducts ADM-Aeolus pre-launch campaign in Iceland,” March 29, 2010, URL: http://www.dlr.de/en/desktopdefault.aspx/tabid-10/60_read-23312/
87) “Campaign over ice sheets tests Aeolus technology,” March 18, 2010, URL: http://www.esa.int/esaLP/SEMHETCKP6G_index_0.html
88) “On the trail of Icelandic depressions – DLR tests new laser measurement technology in flights over Greenland,” DLR News, May 26, 2015, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-13740/year-all/#/gallery/19563
89) ”Antenna downunder ready to hear Aeolus’ first words,” ESA, 16 August 2018, URL: http://m.esa.int/spaceinimages/Images/2018/07/Antenna_downunder_ready_to_hear_Aeolus_first_words
90) ”Aeolus sealed from view,” ESA, 09 August 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Aeolus_sealed_from_view
91) ”Wind satellite fuelled for flight,” ESA, 2 August 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Wind_satellite_fuelled_for_flight
92) ”Aeolus — preparing to fly the wind mission,” ESA, 24 July 2018, URL: http://m.esa.int/Our_Activities/Operations/Aeolus_preparing_to_fly_the_wind_mission
93) ”Aeolus shiny telescope,” ESA, 10 July 2018, URL: http://m.esa.int/spaceinimages/Images/2018/07/Aeolus_shiny_telescope
94) ”Full steam ahead for Aeolus launch,” ESA, 6 July 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Full_steam_ahead_for_Aeolus_launch
95) ”Aeolus sets sail,” ESA, 15 June 2018, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Aeolus_sets_sail
96) ”Aeolus waiting to board,” ESA 15 June 2018, URL: http://www.esa.int/spaceinimages/Images/2018/06/Aeolus_waiting_to_board
97) ”Wind satellite shows off,” ESA, 5 June 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Wind_satellite_shows_off
98) ”Wind satellite survives vacuum,” ESA, 7 Feb. 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Wind_satellite_survives_vacuum
99) ”Wind satellite vacuum packed,” ESA, 2 Nov. 2017, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Aeolus/Wind_satellite_vacuum_packed
100) ”Wind satellite heads for final testing,” ESA, Jan. 30, 2017, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/ADM-Aeolus/Wind_satellite_heads_for_final_testing
101) ”ALADIN ready for Aeolus,” ESA, Aug. 2, 2016, URL: http://www.esa.int/spaceinimages/Images/2016/08/Aladin_ready_for_Aeolus
102) ”Aeolus,” Programs in Progress, ESA Bulletin No 164 (4th quarter) 2015, issued on May 24, 2016, URL: http://esamultimedia.esa.int/multimedia/publications/ESA-Bulletin-164/offline/download.pdf
103) “Perseverance paves the way for wind laser,” ESA, April 16, 2015, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/The_Living_Planet_Programme/Earth_Explorers/ADM-Aeolus/Perseverance_paves_way_for_wind_laser
104) The European Space Agency, "Trailblazing Aeolus mission winding down", April 18, 2023, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Aeolus/Trailblazing_Aeolus_mission_winding_down
105) The European Space Agency, "Aeolus’ fiery demise to set standard for safe reentry", May 8, 2023, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Aeolus/Aeolus_fiery_demise_to_set_standard_for_safe_reentry
106) The European Space Agency,“Aeolus: a historic end to a trailblazing mission” July 29, 2023, URL: https://www.esa.int/Applications/Observing_the_Earth/FutureEO/Aeolus/Aeolus_a_historic_end_to_a_trailblazing_mission
107) The European Space Agency, “Aeolus reentry | How we made history”, Credit: ESA/Monterrat Pinol Sole, July 30, 2023: https://www.youtube.com/watch?v=KzDy_hQDztA
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top