ADEOS-II (Advanced Earth Observing Satellite-II) / Midori-II
EO
JAXA
Multiple direction/polarisation radiometers
Atmosphere
ADEOS-II was an environmental observation satellite aimed to provide Earth observation services with advanced instruments, for applications in climate science, meteorology and fishery.
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA, NASA, CNES, NOAA |
| Mission status | Mission complete |
| Launch date | 14 Dec 2002 |
| End of life date | 25 Oct 2003 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Ocean colour/biology, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Sea ice cover, edge and thickness, Soil moisture, Snow cover, edge and depth, Ocean surface winds |
| Measurement detailed | Cloud top height, Ocean imagery and water leaving spectral radiance, Aerosol absorption optical depth (column/profile), Ocean chlorophyll concentration, Cloud cover, Cloud optical depth, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Aerosol Extinction / Backscatter (column/profile), Cloud liquid water (column/profile), Land surface imagery, Aerosol effective radius (column/profile), Vegetation type, Earth surface albedo, Short-wave Earth surface bi-directional reflectance, Leaf Area Index (LAI), Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Sea surface temperature, CFC-11 (column/profile), CH4 Mole Fraction, N2O (column/profile), HNO3 (column/profile), Wind vector over sea surface (horizontal), CFC-12 (column/profile), NO2 Mole Fraction, Ocean suspended sediment concentration, Precipitation index (daily cumulative), ClONO2 (column/profile), Sea-ice cover, Snow cover, Soil moisture at the surface, Wind speed over sea surface (horizontal), Cloud top temperature, Normalized Differential Vegetation Index (NDVI), Snow water equivalent |
| Instruments | ADEOS Comms, POLDER-2, SeaWinds, AMSR, GLI, ILAS-II |
| Instrument type | Multiple direction/polarisation radiometers, Imaging multi-spectral radiometers (vis/IR), Scatterometers, Atmospheric chemistry, Communications, Imaging multi-spectral radiometers (passive microwave) |
| CEOS EO Handbook | See ADEOS-II (Advanced Earth Observing Satellite-II) / Midori-II summary |
Summary
Mission Capabilities
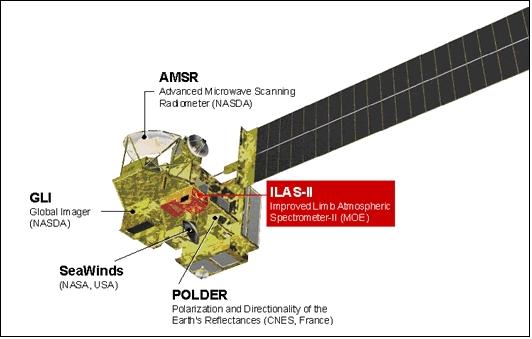
ADEOS-II carried five instruments:
- Advanced Microwave Scanning Radiometer (AMSR),
- Global Imager (GLI),
- SeaWinds scatterometer,
- Improved Limb Atmospheric Spectrometer-II (ILAS-II),
- Polarisation and Directionality of the Earth’s Reflection-2 (POLDER-2).
AMSR was an eight-frequency microwave radiometer, with dual polarization, designed and produced by the National Space Development Agency (NASDA) of Japan, that aimed to take measurements of sea surface temperature (SST), soil water content (moisture), sea wind speed, water equivalent of snow cover, precipitation intensity and sea ice distribution.
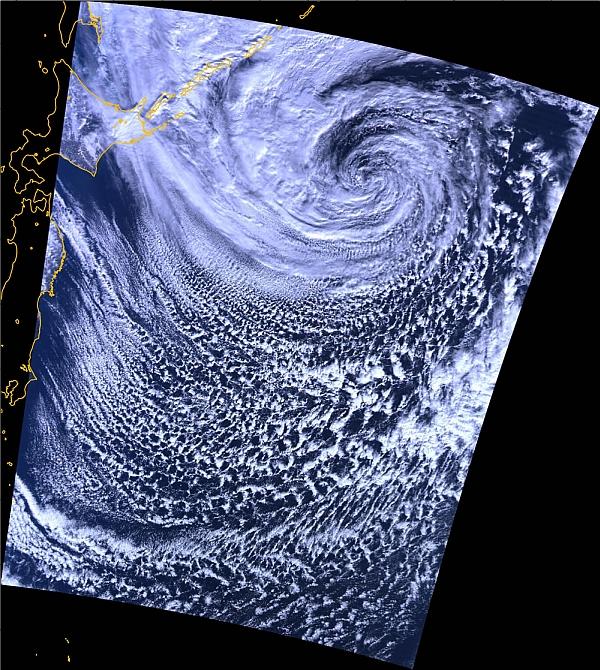
GLI was a 36-channel VIS/IR (Visible/Infrared) radiometer and imaging spectrometer, produced by NASDA, that aimed to investigate the carbon cycle, particularly with regard to biological processes.
SeaWinds scatterometer was a dual-beam active microwave radar, provided by the National Aeronautics and Space Administration/Jet Propulsion Laboratory (NASA/JPL) of the United States, and aimed to provide an accurate and high-resolution measurement of sea-surface vectors.
ILAS-II consisted of three IR spectrometers, and a single VIS spectrometer, and was funded by the Ministry of the Environment (MOE) and managed by the National Institute for Environmental Studies (NIES), with the objectives of taking measurements of measurements of polar stratospheric ozone, atmospheric trace gases, aerosols, temperature and pressure.
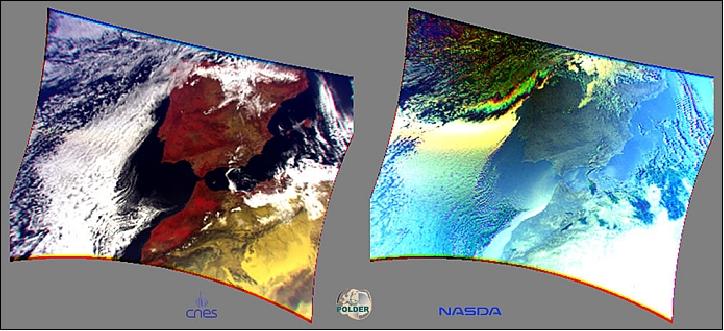
POLDER-2 was a passive optical imaging spectrometer, provided by the French National Centre for Space Studies (CNES), that aimed to simultaneously observe Earth’s radiation from different angles and polarisations.
Performance Specifications
Across its eight bands, AMSR had a centre frequency range of 6.925 - 89.0 GHz, bandwidth range 100 - 3000 MHz and spatial resolutions of 3 x 6 km - 40 x 60 km, with an incidence angle of 55°, and a swath width of 1600 km.
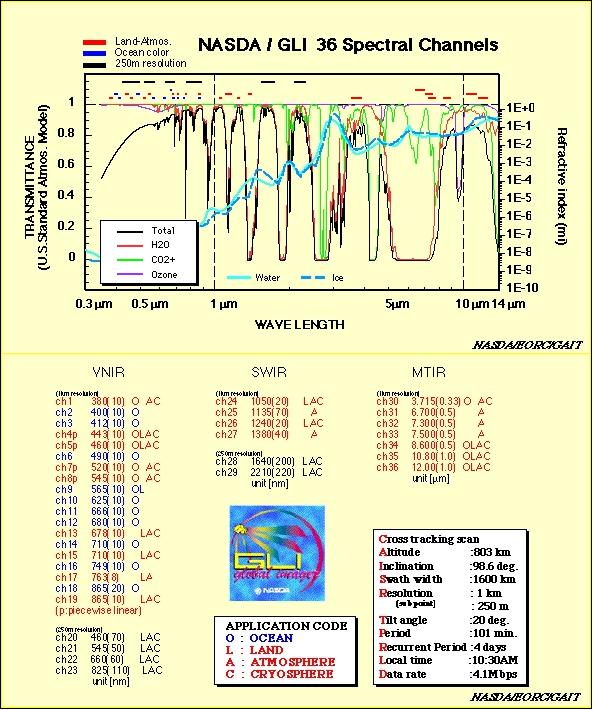
GLI had 23 VNIR (Visible and Near Infrared) bands, with a spectral range of 380 - 830 nm, six SWIR (Shortwave Infrared) bands, with a spectral range of 1050 - 2215 nm and seven MWIR (Middle Wavelength Infrared) and TIR (Thermal Infrared) bands, with a spectral range of 3.715 - 11.95 µm. It had an instantaneous field of view (IFOV) of 1.25 mrad across 28 bands (1 km at nadir) and 0.3125 mrad across six bands (0.25 km at nadir), and a field of view (FOV) of ±43°, resulting in a swath of 1600 km.
SeaWinds scatterometer was capable of measurement of wind speeds, 3 - 20 m/s, with an accuracy of 2 m/s, and wind vector directions to an accuracy of 20°, with a spatial resolution of 50 km and swath width of 1600 km, with an IFOV of ±52° from nadir.
Across its 1112 channels, ILAS-II had spectral coverage of 3-12.85 µm and 753-784 nm, with spatial coverage of 10 - 60 km and observation of latitudinal zones 56º - 70º N and 63º - 88º S.
Across its 9 bands, POLDER-2 had a wavelength range of 443 - 910 nm, bandwidths ranging from 10 - 40 nm, with a swath width of 2400 km, and spatial resolution of 6 x 7 km at nadir.
ADEOS-II operated in a sun-synchronous subrecurrent orbit of altitude 802.9 km, inclination 98.62°, recurrent period 4 days, and Local Solar Time (LST) 1030 ± 15 minutes, with a period of 101 minutes.
Space and Hardware Components
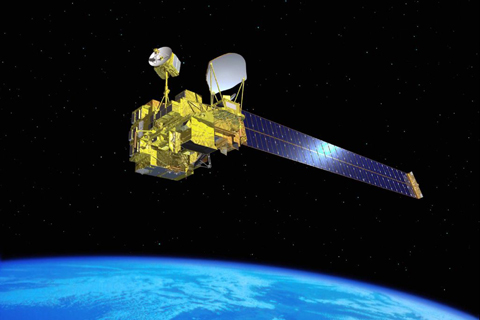
The ADEOS-II spacecraft was manufactured by Mitsubishi Corporation, and based on the design of its predecessor, ADEOS, to reduce costs. It had dimensions of 6 x 4 x 4 m, with a mass of 3700 kg, and a payload mass of 1300 kg. Its attitude and orbit control subsystem (AOCS) used a three-axis strap-down attitude detection system and a zero momentum attitude control system to achieve a pointing accuracy of < 0.3°, as well as a GPS receiver for onboard orbit positioning and timing services. Mission data was downlinked to ground receiving stations in X-band, with S-band used for Tracking, Telemetry and Command (TT&C) support, and Ka-band for mission data. ADEOS-II also carried a Data Collection System (DCS), known as Argos-Next, supplied by NASDA/CNES, which enabled worldwide capabilities for location and environmental data collection for fixed and moving platforms.
ADEOS-II (Advanced Earth Observing Satellite-II) / Midori-II
Overview
ADEOS-II is a Japanese (JAXA, formerly NASDA) Earth environmental observation satellite, a successor mission to ADEOS with international cooperation. The overall objectives are to provide and improve Earth observation services with advanced payload instruments.
The science objectives of ADEOS-II are to acquire data contributing to international global change research (carbon cycle and the water and energy cycle), as well as for applications in such fields as meteorology and fishery.
ADEOS-II is the Japanese contribution to the framework of the International Earth Observation System (IEOS). Other parts of IEOS are EOS (USA), and the ENVISAT and MetOp programs of ESA and EUMETSAT, respectively. The ADEOS-II mission also referred to as Midori-II, is dedicated to the following programs: WCRP/GEWEX & CLIVAR, IGBP and GCOS. 1) 2) 3)
Spacecraft
The ADEOS-II S/C, built by Mitsubishi Corporation, employs the general design of ADEOS to reduce costs.
Dimension of main S/C body: approximately 6 m x 4 m x 4 m. S/C mass = 3700 kg, payload mass = 1300 kg, power = 5.3 kW (EOL), launch vehicle = H-IIA rocket, launch site = TNSC (Tanegashima Space Center).
Attitude and Orbit Control: The AOCS (Attitude and Orbit Control Subsystem) employs a three-axis strap-down attitude detection system and zero momentum attitude control system achieving an attitude pointing error of < 0.3º. A GPS receiver provides onboard timing and orbit position services. The design life of the spacecraft is three years minimum with a goal of five years (propellant).
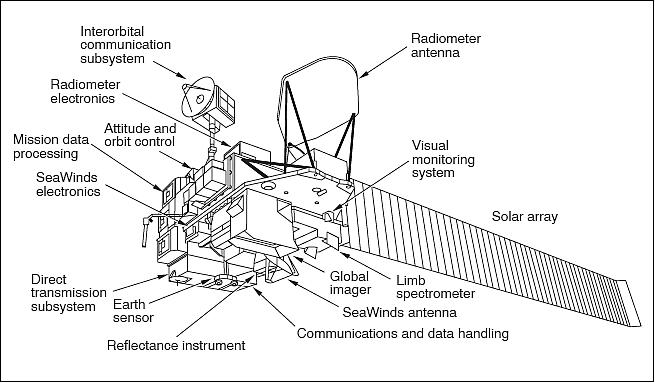
The ADEOS-II spacecraft consists of a mission module, equipped with observation instruments, and a bus module where the avionics subsystems are mounted (Table 1).
S/C subsystem | Short description |
C&DH (Communication and Data-Handling Subsystem) | C&DH receives and decodes command signals transmitted from the tracking control and communicates them to all the ADEOS-II instruments. It is also capable of editing the temperature, voltage, and status of the interior of each instrument and transmitting the information to the ground station using telemetry signals. |
IOCS (Inter-Orbit Communication Subsystem) | IOCS is a subsystem for data-relaying and tracking control through a data-relaying satellite (DRTS) using the S-band and Ka-band. |
MDP (Mission Data Processing Subsystem) | MDP) selects the type of mission data to be transmitted, adds necessary data to mission data, edits the information into packet- or multi-format, and then transmits the information to the direct transmission system (DT) and the IOCS; it is also capable of transmitting the information to the MDR (Mission Data Recorder) |
ODR (Optical Data Recorder) | The ODR is a high-speed, large-volume data recorder using an optical magnetic disk system, introduced in ADEOS-II for the first time. A large-scale recording experiment will be conducted with high-speed, high-volume data. The ODR is contained in the DT unit. |
EPS (Electrical Power Subsystem) | EPS has 3 functions: to supply the bus power to each subsystem of the satellite; to manage to charge and discharge the battery; and to control the ignition of the ordnance controller. During an eclipse of the orbit, it supplies power to the satellite by discharging the battery. During the sunlit orbit, excess power generated by the solar paddle is used to charge the battery. During the critical phase, which is the initial stage after the launch, it provides power to ignite the ordnance controller through the explosive-tube control unit (ODC) to deploy the solar paddle, DCS antennae, and IOCS compartment as well as to release locks on AMSR and SeaWinds. |
PDL (Paddle Subsystem) | PDL converts solar energy into electric energy and transfers it to the satellite's power system. The paddle system to be installed on ADEOS-II is sufficient to satisfy demands. It has a large power-generating capacity of at least 5 kW (EOL), is highly storable, and has been light-weighted. The system uses an extension method wherein 50 flexible blankets with a total of 55,680 solar-battery cells are extended on a joint mast in orbit. |
AOCS (Attitude and Orbit Control Subsystem)) | AOCS has four functions: to establish the three-axis attitude control after the rocket is separated from the satellite, to maintain the satellite's attitude, to control the orbit, and to articulate the solar paddle. Sensors to detect the attitude include a control-standard unit (IRC), an Earth sensor (ESA), and a fine sun sensor assembly (FSSA), Actuation is provided by a reaction wheel assembly (RWA) and a magnetic torque system (MTQ). The latter also transmits control signals necessary for attitude control and orbit control to the RCS. |
RCS (Reaction Control Subsystem) | RCS generates propulsion power necessary for initial-stage attitude correction and orbit control according to the control signals from the AOCS, using the 1 N thruster and 20 N thruster. |
DTL (Direct Transmission Subsystem for local users) | DTL is capable of modulating data extracted from four (three visible and one infrared) of the 36 observation bands of the GLI (Global Imager) into BPSK; it is also capable of transmitting the data to local users such as vessels in the UHF band (467.7 MHz). The water colour and water temperature data are used to study the ocean conditions, distribution of water temperature, and basic productivity of the ocean. |
RF communications: Mission data are downlinked in X-band to ground receiving stations. The S-band is used for TT&C support. In addition, there is a communication link via DRTS (Data Relay and Test Satellite) in Ka-band for mission data and S-band for TT&C data. This communication link is referred to as IOCS (Inter-Orbital Communication Subsystem).

Launch: A launch of ADEOS-II on a H-IIA vehicle took place on Dec. 14, 2002 from TNSC (Tanegashima Space Center), Japan, along with FedSat of Australia, WEOS of the Chiba Institute of Technology (Chiba, Japan), and MicroLabSat of JAXA, NICT and CRL as secondary payloads on the mission.
Orbit: Sun-synchronous subrecurrent orbit, altitude = 802.9 km, inclination = 98.62º, period = 101 minutes, recurrent period = 4 days, local sun time = 10:30 AM ±15 minutes.
Mission Status
The ADEOS-II mission was operational for only 10 months - when an anomaly stopped all further operations on Oct. 24, 2003. Indeed a great loss in Earth observations for Japan and its partners as well as for the entire Earth observation community.
• On Oct. 24, 2003, ADEOS-II experienced a severe power failure, stopping all mission operations. JAXA formed immediately the “Midori-II anomaly investigation team.” However, the nature of the failure prevented any recovery that would have led to a continuation of the mission. 4) 5) 6)
One of the two main working hypotheses into its cause was that a debris impact on the high-power harness carrying current between the single solar array and the satellite bus resulted in a sustained electric arc. The harness consisted of a bundle of wires covered by a sheet of multi-layered insulation (MLI). 7)
• NASDA successfully conducted the intersatellite communication experiment between ADEOS-II and ARTEMIS (Advanced Relay and Technology Mission) of the European Space Agency (ESA) from March 28 to 30, 2003. This experiment used both links for data transmission; the Ka-band (26 GHz) for payload data and the S-band (2 GHz) for TT&C services.
• A successful communication experiment between ADEOS-II and DRTS (Data Relay Test Satellite) took place on Feb. 19, 2003. 8)
Sensor Complement
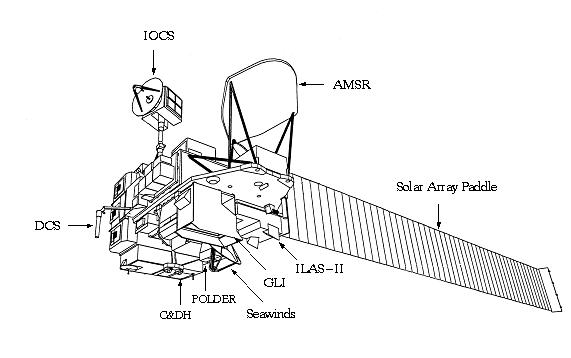
The ADEOS-II payload comprises six instruments:
- NASDA's AMSR (Advanced Microwave Scanning Radiometer)
- GLI Global Imager),
- NASA/JPL's SeaWinds scatterometer,
- the Japanese Environment Ministry's ILAS-II (Improved Limb Atmospheric Spectrometer-II),
- POLDER-2 (Polarization and Directionality of the Earth's Reflectance) of CNES,
- the Argos-Next data collection instrument developed jointly by NASDA and CNES. 9)
AMSR (Advanced Microwave Scanning Radiometer)
AMSR is a passive NASDA core sensor of MSR heritage flown on MOS-1 and MOS-1B satellites.
Objectives: measurement of sea surface temperature (SST), soil water content (moisture), sea wind speed, water equivalent of snow cover, precipitation intensity, sea ice distribution, precipitable water, etc. Microwave emissions from the atmosphere, ocean, sea ice, and land are measured at multiple frequencies.
From this information, a number of geophysical data related to the Earth's environment, such as water vapour content, the water content of clouds, the water equivalent of the snow cover, etc. are measured. - A further instrument, AMSR-E, was developed by NASDA, and it is flown on NASA's Aqua mission. 10) 11)
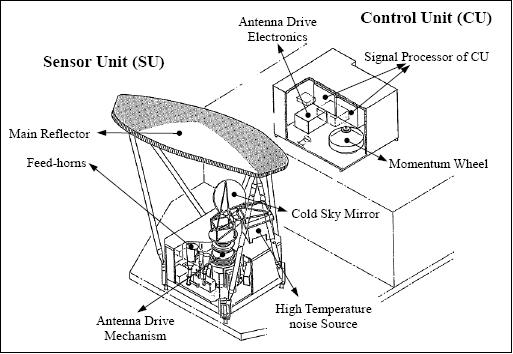
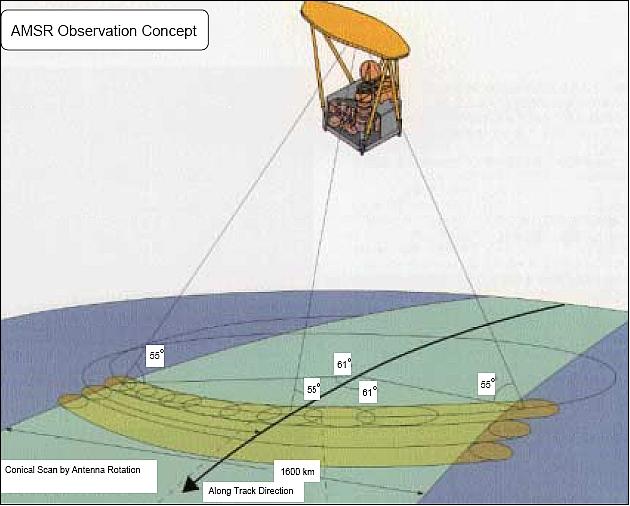
AMSR is an eight-frequency, total-power microwave radiometer (a passive sensor) with dual polarization (except for two vertical channels in the 50 GHz band). It detects microwave emissions from the Earth's surface and atmosphere. Conical scanning at 40 rpm is employed to observe the Earth's surface with a constant incidence angle of approximately 55º (a scan drive motor rotates the antenna, the rotating mass is nearly 200 kg, and momentum and torque compensation is achieved with momentum wheels). Multifrequency measurements are realized by arranging multiple feed-horns, and by staggering their integration timing to compensate for the differences in the beam direction. The 89 GHz band has two feed horns (A/B) to permit enough sampling in the along-track direction. The AMSR 2.0 m diameter offset parabolic antenna is the largest spaceborne microwave radiometer antenna of its kind; it provides reasonable spatial resolution even in lower frequency channels.
AMSR has a high-temperature calibration source (about 340 K) and a small reflector to acquire the radiant temperature of deep space (at about 3 K). This so-called “external calibration scheme” was first introduced by SSM/I (Special Sensor Microwave/Imager) on DMSP satellites. Each feed horn, from 6.9-89 GHz sees the calibration sources once per scan period. In addition, extensive pre-launch characterization/calibration activities were done.
Centre frequencies, (GHz) | 6.925 | 10.65 | 18.7 | 23.8 | 36.5 | 50.3 | 52.8 | 89.0A | 89.0B |
Bandwidth, (MHz) | 350 | 100 | 200 | 400 | 1000 | 200 | 400 | 3000 | 3000 |
Radiometric resolution | 0.34 K | 0.7 K | 0.7 K | 0.6 K | 0.7 K | 1.8 K | 1.6 K | 1.2 K | 1.2 K |
Spatial resolution (km) | 40x70 | 27x46 | 14x25 | 17x29 | 8x14 | 6x10 | 6x10 | 3x6 | 3x6 |
3dB beam width (º) | 1.8 | 1.2 | 0.65 | 0.75 | 0.35 | 0.25 | 0.25 | 0.15 | 0.15 |
Antenna | offset parabolic, aperture diameter = 2 m, conical scan | ||||||||
Incidence angle | 55º | 54.5º | |||||||
Integration time | 2.5 ms | 1.2 ms | |||||||
Polarization | H/V (horizontal and vertical) | H (vertical) | H/V | ||||||
Antenna scan rate | 40 rpm (1.5 s/scan) | ||||||||
Cross-polarization | less than×-20 dB | ||||||||
Swath width | 1600 km | ||||||||
Dynamic range | 2.7 K to 340 K | ||||||||
Absolute accuracy | 1 K (1 sigma) | ||||||||
A/D quantization | 12 bit | 10 bit | |||||||
Data rate | 130 kbit/s (CCSDS format, 14 channels of data acquisition) | ||||||||
Instrument mass, power | 320 kg, 400 W | ||||||||
GLI (Global Imager)
GLI is an optical NASDA core sensor of OCTS heritage on ADEOS.
Objectives: Biological and physical processes, stratospheric ozone. GLI is for studying and monitoring the carbon cycle in the ocean, principally as to biological processes. Multispectral observations from the near UV to the near IR reflected solar radiation from the Earth's surface including land, ocean and clouds. Determination of chlorophyll pigment, phycobilin and dissolved organic matter (DOM) in the ocean; classification of phytoplankton according to their pigment. Measurement of sea surface temperature (SST), cloud distribution, land coverage, vegetation index, etc. 12) 13) 14) 15) 16)
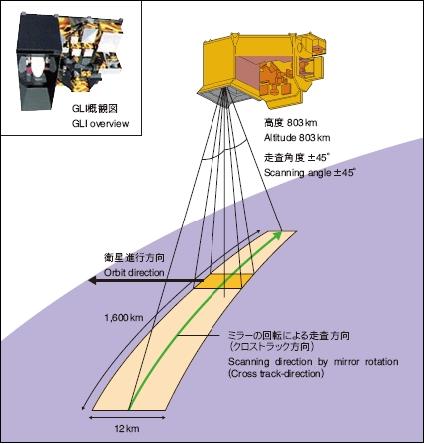
GLI is a 36-channel VIS/IR radiometer/imaging spectrometer (opto-mechanical instrument) featuring a cross-track mirror and an off-axis parabolic mirror as the collecting optics and focal planes in which the detectors are arrayed in the along-track direction with spectral interference (dichroic) filters. The scan mirror rotates at 16.7 Hz. GLI can tilt the scan mirror ±20º from nadir in order to avoid sun glitter. GLI has five focal planes, two for VNIR, two for SWIR, and one for MWIR/TIR. Two VNIR focal planes have detector arrays for 13 and 10 bands respectively. Two SWIR focal planes have detector arrays for 4 and 2 bands, while the MWIR/TIR regions have one focal plane with a detector array for 7 bands. One SWIR and the MWIR/TIR focal planes are cooled to 220 K and 80 K by a multistage Peltier element and Stirling cycle mechanical cooler, respectively. The VNIR detector material is Si, the SWIR is InGaAs, the MWIR/TIR material is CMT.
GLI employs a piecewise linear method with cascade amplification for signal processing on four bands in order to meet requirements for automatic observation of objects with large radiance differences (ocean colour and land vegetation) exhibiting a wide dynamic range.
Spectral bands |
|
IFOV | 1.25 mrad (or 1 km at nadir) for 28 bands |
FOV | ±43º (swath = 1600 km) |
A/D quantization | 12 bit |
Polarization sensitivity | < 2% |
Registration among total bands | < 0.2 pixels |
Data rate | 4 Mbit/s (for 1 km resolution), 16 Mbit/s (250 m resolution) |
Tilt angle | +20º, 0º, -20º |
GLI scan mirror | Material: beryllium, surface coated with silver and SiO2 |
Instrument mass, power | 450 kg, 400 W |
SeaWinds (NASA Scatterometer II)
SeaWinds PI: M. Freilich, NASA/JPL. Objective: to acquire accurate, high-resolution, global measurements of sea-surface wind vectors in 1 to 2-day repeat cycles.
Applications: studies of tropospheric dynamics and air-sea interaction processes, including air-sea momentum transfer. Improvement of weather forecasts near coastlines by using wind data in numerical weather- and wave-prediction models.
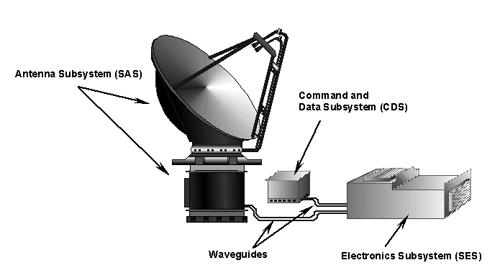
SeaWinds consists of three major parts:
- SAS (SeaWinds Antenna Subsystem),
- SES (SeaWinds Electronics Subsystem),
- CDS (Command and Data Subsystem). 17)
• SAS consists of a 1 m diameter parabolic reflector antenna mounted to a spin activator assembly, which causes the reflector to rotate at 18 rpm. The antenna spins at a very precise rate and emits two beams about 6 degrees apart, each consisting of a continuous stream of pulses. The two beams are necessary to achieve accurate wind direction measurements. The pointing of these beams is precisely calibrated before launch so that the echoes may be accurately located on the ground from space.
• SES is the heart of the scatterometer and it contains a transmitter, receiver and digital signal processor. It generates and sends high radio frequency (RF) waves to the antenna. The antenna transmits the signal to the Earth's surface as energy pulses. When the pulses hit the surface of the ocean it causes a scattering effect referred to as backscatter.
• The CDS is essentially a computer housing the software that allows the instrument to operate. It provides the link between the command centre on the ground, the spacecraft and the scatterometer. It controls the overall operation of the instrument, including the timing of each transmitted pulse and collects all the information necessary to transform the received echoes into wind measurements at a specific location on Earth.
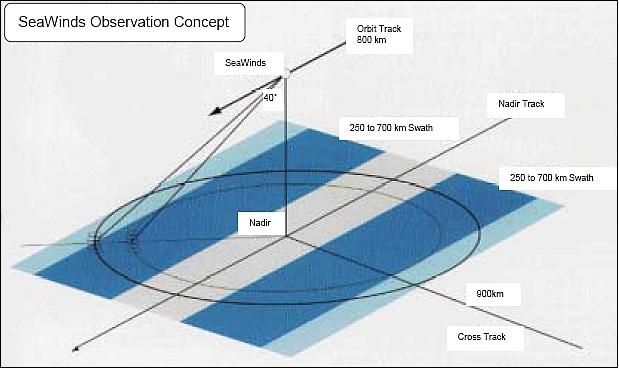
The instrument is an active microwave radar (a scanning pencil-beam scatterometer) with dual-beam, 40º and 46º look angle from nadir, conical scan 1 m diameter reflector (dish) antenna, operating in Ku-band at 13.402 GHz (110 W pulse at 189 Hz PRF). Measurement of wind speeds between 3-20 m/s to an accuracy of 2 m/s, wind vector directions to an accuracy of 20º. The dish antenna is rotated about the satellite nadir axis at 18 rpm. Data is collected in a continuous 1800 km swath, centred about nadir.
Spatial resolution = 50 km; IFOV = ±52º from nadir; mass = 205 kg; power = 250 W; duty cycle = 100%; average data rate = 40 kbit/s; the thermal operating range is 5-40ºC; pointing knowledge to 500 arcseconds.
- SeaWinds data products consist of global multi-azimuth normalized radar cross-section measurements and 50-km-resolution ocean vector wind maps. 18) 19) 20)
Radar | 13.4 GHz (Ku-band); 110 W pulse at 189 Hz pulse repetition frequency (PRF) |
Antenna | 1 m diameter rotating dish that produces two spot beams, sweeping in a circular pattern |
Swath width | 1800 km (about 90% coverage every day) |
Wind speed measurements | 3 to 20 m/s with 2 m/s accuracy; wind direction with 20º accuracy |
Wind vector resolution | 25 km |
Instrument mass, power | 205 kg, 250 W |
Average data rate | 40 kbit/s |
See also the SeaWinds instrument description under QuikSCAT for more details.
ILAS-II (Improved Limb Atmospheric Spectrometer-II)
The ILAS-II sensor is of ILAS heritage on ADEOS, funded by MOE (Ministry of the Environment) and managed by NIES (National Institute for Environmental Studies). The spectrometer uses gratings for solar occultation measurements of polar stratospheric ozone, atmospheric trace gases (O3, HNO3, NO2, N2O, CH4, H2O, CFC-11, CFC-12, ClONO2, etc.), aerosols, temperature and pressure. ILAS-II is used to monitor and study changes in the stratosphere which are triggered by emissions of CFC gases. 21) 22) 23) 24) 25) 26) 27) 28)
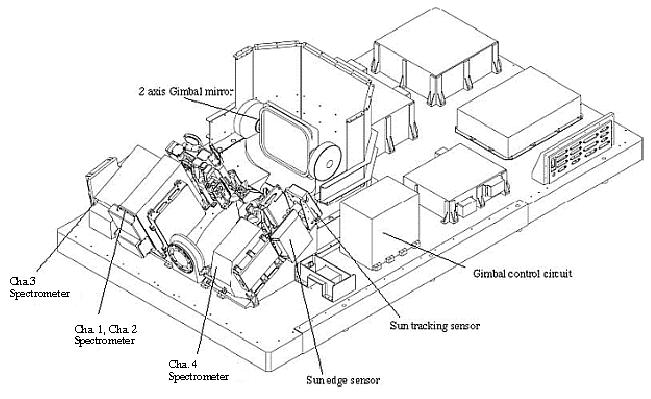
The instrument consists of the following elements: a two-axis gimbal mirror which is controlled to track the radiometer centre of the sun, a 13 cm diameter Cassegrain telescope, beam splitters, and reflective transfer optics, three IR spectrometers, a VIS spectrometer, a sun-edge sensor, and signal processing units.
The band 1 and 2 spectrometers employ a Czerny-Turner type spectrograph design with a plane grating in 30 gr./mm for band 1; the detector material for both bands is PbTiO3. The band 3 spectrometer employs an echelle grating with 23.2 gr./mm. The VIS spectrometer uses a holographic concave grating (f/8.0, f=400 mm, 1800 lines/mm) with a 1024-pixel MOS photo diode array detector. The VIS spectrometer is self-calibrating using the information on the solar Fraunhofer lines.
Instrument spectral coverage: 3-12.85 µm and 753-784 nm, spatial coverage = 10 - 60 km, vertical resolution = 1 km, observation accuracy = 5% (1% for ozone).
The prime contractor for ILAS-II is MEI (Matsushita Electric Industrial Co. Ltd.).
Spectrometer | 4 grating spectrometers (VIS and IR) |
- Spectral band 1 | 44 IR channels from 6.21-11.76 µm (850-1610 cm-1) with 0.1296 µm interval |
Telescope | Cassegrain, 13 cm diameter aperture |
Sun tracker | Pointing mirror: 20 (az.) x 17 (el.) cm; sun edge sensor, 8 arcsec resolution per pixel |
IFOV (at tangent height) | IR channels: 1 km (vertical) x 13 km (horizontal); |
Observation parameters | O3, HNO3, NO2, N2O, CH4, H2O, CFC-11, CFC-12, ClONO2, aerosols, pressure and temperature |
Observation region | Latitudinal zones 56º - 70º N and 63º - 88º S |
Data rate | 453.7 kbit/s, sampling rate at 10 Hz, CCSDS packeting |
Instrument operation | 12 minutes per occultation (limb observations) |
ILAS mass, power, size | < 138 kg, < 120 W, 950 mm x 1670 mm x 600 mm |
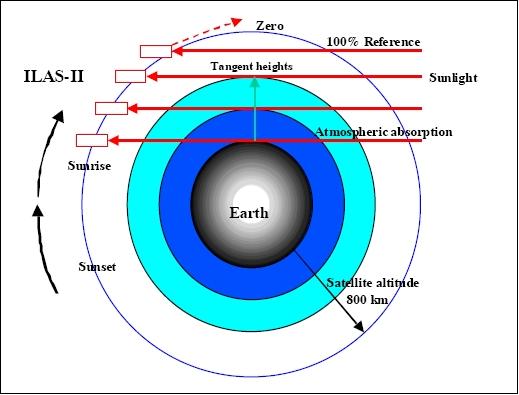
Like ILAS, ILAS-II makes observations based on the solar occultation method (Figure 13). The solar occultation method measures the components of solar light absorbed while passing through the atmospheric layer surrounding the Earth and resolves it into spectra. The substances in the atmosphere layer may be identified and quantified through the spectral resolution of absorbed light because of their specific spectral absorption characteristics. Continuous observations following the sun’s path give us a wide variety of information when sunlight passes through the atmospheric layers at different altitudes. Since sunlight passing through the atmosphere is measured at different altitudes, this provides information on the altitude distribution of the light-absorbing substances in the various atmospheric layers.
POLDER-2 (Polarization and Directionality of the Earth's Reflectances)
POLDER-2 is a passive optical imaging radiometer of CNES. The instrument is an identical twin to its predecessor, POLDER-1 flown on ADEOS. By simultaneously observing the Earth's radiation in polarized light and from different viewing angles, it is focusing on several themes. POLDER's very wide field of view is also a unique asset for building up time series of measurements from space, making it possible to obtain daily global coverage. POLDER-2 acquires also ocean colour measurements. 29) 30) 31)
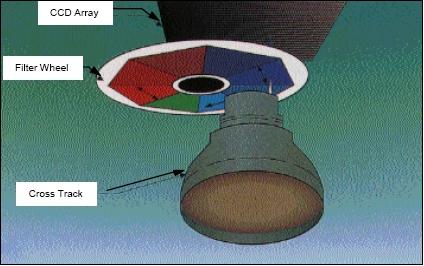
The POLDER instrument is an imaging system, a radiometer/polarimeter, featuring a 2-D CCD detector array, wide field of view telecentric optics and a rotating wheel carrying spectral and polarized filters. The instrument spectral characteristics are defined in Table 6 (see also instrument description under ADEOS).
The POLDER-2 instrument has a mass of 32 kg, a size of about 800 mm x 500 mm x 250 mm, and a power consumption of 42 W.
Wavelength nm | Bandwidth (nm) | Polarization | Dynamic Range | Main Measurement Objective | |
443 | 20 | no | NA | 0.05-0.22 | Ocean colour |
443 | 20 | yes | 0.05-1.1 | NA | Aerosols, ERB |
490 | 20 | no | NA | 0.034-0.17 | Ocean colour |
565 | 20 | no | NA | 0.019-0.11 | Ocean colour |
670 | 20 | yes | 0.013-1.1 | 0.013-0.27 | Vegetation, aerosols, ERB |
763 | 10 | no | 0.007-1.1 | 0.007-0.25 | Cloud top temperature |
765 | 40 | no | 0.007-1.1 | 0.007-0.25 | Aerosols, CTP |
865 | 40 | yes | 0.007-1.1 | 0.007-0.25 | Vegetation, aerosols, ERB |
910 | 20 | no | 0.007-1.1 | 0.007-0.25 | Water vapour content |
Instrument mass, volume | 32 kg, 0.8 m x 0.5 m x 0.25 m |
Power consumption | 50 W (imaging mode) |
Data quantization | 12 bit |
Data rate | 883 kbit/s |
Observation swath | 2400 km |
Pixel size at nadir | 6 km x 7 km |
DCS (Data Collection System)
DCS is a NASDA/CNES joint development (CNES-NASDA agreement as of 1996) referred to as Argos-Next. The DCS offers worldwide capabilities for location and environmental data collection for fixed and moving platforms. The downlink frequency of 460-470 MHz with a data rate of 200 bit/s is added to the existing Argos system. The received frequency of the DCP (Data Collection Platform) is 401.65 MHz, the data rate of the DCP = 400 bit/s. Total DCS instrument mass = 76 kg, power consumption = 60 W.
The Argos-Next instrument version offers a two-way messaging capability for enhanced service provision. So-called PMTs (Platform Messaging Transceivers) are being used by the ground segment platforms able to receive and interpret messages sent by satellite. The new service spectrum permits for example calibrating platform sensors and managing duty cycle by switching terminals on and off when needed. Argos-Next also supports secure message transmissions. 32) 33)
Receiving Frequency | 401.65 MHz±0.0405 MHz |
Receiving Signal Bit Rate | 400bit/s |
Receiving Signal Modulation Mode | PCM(Bi phi -L)/PM |
Receiving Signal Bit Error | below 1×10-5 |
Transmitting Frequency | 465.9875 MHz |
Transmitting Power | over 5 W |
Transmitting Signal Bit Rate | 200 bit/s |
Transmitting Signal Modulation Mode | PCM(Bi-L)/PM |
UHF Antenna | Formed broad beam pattern |
G/T | over -36.6 dBk |
EIRP | over 27.1 dBm |
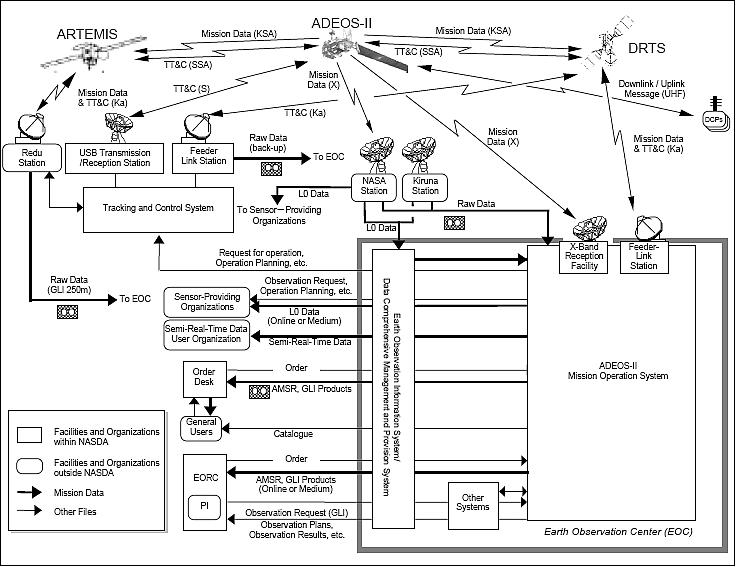
Ground Segment
The main components of the ground system, which carries out the mission operation of ADEOS-II, are (Ref. 3):
1) Facilities and Organizations within JAXA
• ADEOS-II Mission Operating System: EOC (Earth Observation Center)
• Earth Observation Information System (Data Comprehensive Management and Provision System): Earth Observation Center
- EOC Control System
- Observation Request Enquiry System
• TACC (Tracking and Control System)
• EORC (Earth Observation Data Analysis Research Center)
2) Facilities and Organizations outside of JAXA
• Overseas Stations
• NASA Stations (ASF, WFF)
- Kiruna Station
• Sensor-Providing Organizations
• ESA Redu Station
• Users
- Principal Investigator (PI)
- Semi-Real-Time Data Users
- General Users
Figure 19 illustrates the overall structure of the ground system for ADEOS-II.
The ADEOS-II mission operation system is a central-core system for the mission operation of ADEOS-II, and is provided by JAXA for the EOC (Earth Observation Center). The ADEOS-II mission operation system establishes plans for the operation of mission instruments, recording and playing of MDR, etc., based on sensor operation requests by sensor-providing organizations. Furthermore, it receives mission data sent via a relay satellite or directly through X-band and prepares level-0 data for each mission instrument. It also prepares standard AMSR and GLI products (level-1 products and higher-order products with level 2 and higher) and handles DCS data.1 The level-0 data obtained by mission instruments other than AMSR and GLI that have been processed by the ADEOS-II mission operation system will be distributed to sensor-providing organizations online or through a medium.
The mission operation system of ADEOS-II also processes AMSR and GLI 1km products on a semi-real-time basis and makes them available online to semi-real-time data users.
Finally, the feeder-link station of the ADEOS-II mission operation system functions as a back-up station that transmits commands through a relay satellite and obtains telemetry data when there is trouble or some failure at the feeder-link station of the track-control system.
References
1) http://www.jaxa.jp/projects/sat/adeos2/index_e.html
2) http://sharaku.eorc.jaxa.jp/ADEOS2/index.html
3) ADEOS-II Reference Handbook, URL: http://sharaku.eorc.jaxa.jp/ADEOS2/doc/pdf/refbook_e_ver3.pdf
4) Operational Anomaly with Midori-II, Oct. 25, 2003, JAXA, URL: http://www.jaxa.jp/press/2003/10/20031025_midori2_e.html
5) “Earth Observation Operation of Midori-II,” JAXA, Oct. 31, 2003, URL: http://www.jaxa.jp/press/2003/10/20031031_midori2_e.html
6) “Hope of salvaging Japanese environmental satellite fades,” Spaceflight Now, Oct. 31, 2003, URL: http://www.spaceflightnow.com/news/n0310/31adeos2/
7) JunichiroIshizawa, Naoko Baba, “Evaluation on Wire Covering Degradation (Investigation of ADEOS-II Malfunction),” JAXA, URL: https://eeepitnl.tksc.jaxa.jp/mews/jp/19th/text/208.pdf
8) Successful Intersatellite Communication Experiment Between Midori II (ADEOS-II) and ESA's ARTEMIS,” URL: http://www.jaxa.jp/press/nasda/2003/midori2-artemis_20030404_e.html
9) http://sharaku.eorc.jaxa.jp/ADEOS2/sensor/sensor.html#ams
10) K. Imaoka, T. Sezai, T. Takeshima, T. Kawanishi, A. Shibata, “Instrument characteristics and calibration of AMSR and AMSR-E,” Proceedings of IGARSS 2002, Toronto, Canada, June 24-28, 2002
11) M. Nakajima, Y. Ito, H. Maejima, Y. Kojima, “The Development of AMSR and GLI for ADEOS-II,” presented at the 45th Congress of the International Astronautical Federation, October 9-14, 1994, Jerusalem, Israel
12) T. Y. Nakajima, et al., “Optimization of the Advanced Earth Observing Satellite II Global Imager channels by use of radiative transfer calculations,” Applied Optics, Vol. 37, No. 15, May 20, 1998, 3149-3163
13) T. Y. Nakajima, T. Nakajima, H. Masunaga, A. Higurashi, Y. Liu, “Cloud and aerosol retrievals from ADEOS/GLI and other sensors,” Proceedings of IGARSS 2002, Toronto, Canada, June 24-28, 2002
14) F. Sakaida, K. Hosoda, M. Moriyama, H. Murakami, A. Mukaida, H. Kawamura, “ Sea surface temperature observation by Global Imager (GLI)/ADEOS-II: Algorithm and accuracy of the product,” Journal of Oceanography, Vol. 62, No 3, June 2006, pp. 311-319
15) R. Höller, A. Higurashi, Te. Nakajima, “The GLI 380 nm channel - application for satellite remote sensing of tropospheric aerosol,” Link
16) http://suzaku.eorc.jaxa.jp/GLI/ov/sensor.html
17) http://winds.jpl.nasa.gov/missions/seawinds/index.cfm
18) M. W. Spencer, C. Wu, D. G. Long, “Tradeoffs in the Design of a Spaceborne Scanning Pencil Beam Scatterometer: Application to SeaWinds,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 35, No 1, Jan. 1997, pp. 115-120
19) B. D. Boller, et al., “The Development of the SeaWinds Scatterometer Electronics Subsystem (SES),” Proceedings of IGARSS'96, Vol. 1, pp. 269-272
20) “SeaWinds on Adeos 2 Launch,” NASA, December 2002, URL: http://www.jpl.nasa.gov/news/press_kits/seawinds-adeos2.pdf
21) Information provided by Yasuhiro Sasano of NIES (National Institute for Environmental Studies)
22) http://db.cger.nies.go.jp/ilas2/en/project/jissi.html
23) Y. Sasano, et al., “ILAS-II Instrument and Data Processing System for Stratospheric Ozone Layer Monitoring”, Proceedings of SPIE, Vol.4150, pp.106-114, 2001
24) S. Oshchepkov, Y. Sasano, T. Yokota, N. Uemura, H. Matsuda, Y. Itou, H. Nakajima, ”Simultaneous stratospheric gas and aerosol retrievals from broadband infrared occultation measurements,” Applied Optics, Vol. 44, Issue 22, 2005, pp. 4775-4784
25) A. Kuze, M. Suzuki, K. Nakamura, J. Tanii, Y. Sasano, “Design and performance of the ILAS-II echelle grating spectrometer for CIONO2 measurement,” Proceedings of SPIE, 'Infrared Spaceborne Remote Sensing VI,' Marija Strojnik, Bjorn F. Andresen, Editors, Volume 3437, November 1998, pp. 240-248
26) http://www.eorc.jaxa.jp/en/hatoyama/satellite/sendata/ilas2_e.html
27) ILAS-II User's Handbook, Version 1.1, URL: http://db.cger.nies.go.jp/ilas2/en/document/usershb/UHB_ALL_E.pdf
28) http://db.cger.nies.go.jp/ilas2/en/press_release/press_release_e.html
29) http://smsc.cnes.fr/POLDER/GP_instrument.htm
30) http://sharaku.eorc.jaxa.jp/ADEOS2/library/20030221/0221_01.html
31) E. Thouvenot, “CNES Ocean-color related programs & activities,” 8th IOCCG (International Ocean Color Coordinating Group), Florence, Italy, February 24-26, 2003, URL: http://www.ioccg.org/sensors/polder/8ioccg.pdf
32) C. Gal, Argos-Next - Two-way messaging for enhanced service,” CNES Magazine No 15, April 2002, p. 39
33) “Argos-Next gets to work,” CNES Magazine No 18, Feb. 2003, p. 8
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).