ADEOS (Advanced Earth Observing Satellite) / Midori
EO
JAXA
Ocean colour instruments
Multiple direction/polarisation radiometers
ADEOS 1 was an Earth Observation mission. The satellite’s objectives were to observe changes in the Earth’s atmosphere, track depletion of the ozone layer and model maritime meteorological conditions.
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA, NASA, CNES, MOE (Japan), MITI (Japan) |
| Mission status | Mission complete |
| Launch date | 17 Aug 1996 |
| End of life date | 30 Jun 1997 |
| Measurement domain | Atmosphere, Ocean, Land |
| Measurement category | Atmospheric Temperature Fields, Ocean colour/biology, Aerosols, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Landscape topography, Ocean topography/currents |
| Measurement detailed | Aerosol absorption optical depth (column/profile), Ocean chlorophyll concentration, Aerosol optical depth (column/profile), Cloud base height, Aerosol Extinction / Backscatter (column/profile), Land surface imagery, Earth surface albedo, Leaf Area Index (LAI), Land cover, Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, CFC-11 (column/profile), CH4 Mole Fraction, N2O (column/profile), HNO3 (column/profile), Ocean surface currents (vector), Land surface topography |
| Instruments | NSCAT, SEM (JAXA), IMG, POLDER, TOMS, ILAS, OCTS, ADEOS Comms, RIS, AVNIR |
| Instrument type | Ocean colour instruments, Multiple direction/polarisation radiometers, High resolution optical imagers, Earth radiation budget radiometers, Space environment, Scatterometers, Atmospheric chemistry, Communications, Precision orbit |
| CEOS EO Handbook | See ADEOS (Advanced Earth Observing Satellite) / Midori summary |

Summary
Mission Capabilities
ADEOS contained eight scientific instruments.
- A simple Radiometer, operating in the Advanced Visible and Near-Infrared (AVNIR) spectral ranges captured high spatial resolution images.
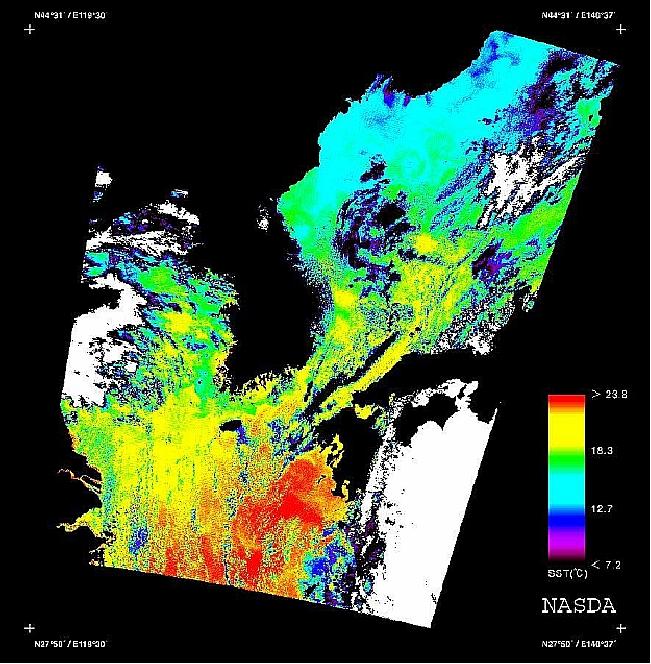
- The Ocean Colour and Temperature Scanner (OCTS) was a whiskbroom radiometer, measuring ocean colour and sea surface temperature.
- NASA’s Scatterometer (NSCAT) used fan-beam Doppler signals to derive wind speeds over bodies of water.
- The Total Ozone Mapping Spectrometer (TOMS) tracked the composition of Earth's ozone layer by measuring the albedo of earth’s upper atmosphere.
- The Polarisation and Directionality of Earth’s Reflectance were measured by POLDER.
- Analysis of the upper atmosphere’s gaseous composition was conducted by the Improved Limb Atmospheric Spectrometer (ILAS).
- Such data was additionally obtained via the Retroreflector in Space (RIS) experiment, reflecting a transmitted laser beam back down to a designated ground station.
- Finally, an Interferometric Monitor for Greenhouse Gases (IMG) was also present to map greenhouse gas ratios on a global scale.
Performance Specifications
AVNIR observed with a spatial resolution of 8 m in the Panchromatic (PAN) Band and 16 m in the Multi Spectra (MS)l Band. The swath width was 80 km, whereas OCTS imaged over much greater spatial scales, citing a ground resolution of 700 m and swath width of 1400 km. NSCAT consisted of six antennas, each transmitting a 13.995 GHz (Ku-band) active microwave radar signal with a swath width of 600 m. TOMS monitored solar diffuser reflectance across six spectral bands, with frequencies ranging from 308.6 nm to 360 nm. POLDER detects in 15 channels and transmits a beam of dimensions 1440 km x 2200 km (across-track).
ILAS utilised two grating spectrometers, observing across 44 infrared channels and 1024 visible channels respectively. IMG made continuous measurements across three infrared bands, boasting a fine spectral resolution of 0.1 cm-1.
ADEOS operated in a Sun-synchronous polar descending orbit at an altitude of 797 km, with an orbital period of 100.8 minutes and an inclination of 98.6º.
Space and Hardware Components
The spacecraft was constructed by Mitsubishi Electric Corporation, with a key component of the satellite bus being one wing 3 x 13 m deployable solar paddle. Telemetry, Tracking and Command (TT&C) was generally transmitted over the S-Band radio wave channel, with an uplink frequency of 2.0 GHz and downlink frequency of 2.2 GHz.
In June 1997, ADEOS spacecraft operations were terminated following several critical malfunctions, the cause of which is believed to be structural damage of the solar array, prompting loss of power.
ADEOS (Advanced Earth Observing Satellite) / Midori
ADEOS (Midori) is the first Japanese (NASDA) satellite mission with international cooperation. In Japan, the ADEOS satellite is also referred to as `Midori', meaning `green'.
The overall objective of the mission is dedicated to Earth environmental research:
- integrated observation of geophysical parameters,
- global observation of land,
- ocean and atmospheric processes (ocean colour and sea surface temperature).
In addition, communication demonstrations are planned for the study (feasibility) of inter-orbital links, called IOCS (Inter-Orbital Communication Subsystem). 1) 2)
Note: The Japanese space agency NASDA (National Space Development Agency) changed its name on October 1, 2003, to JAXA (Japan Aerospace Exploration Agency), Tokyo, Japan. JAXA is the new name (merger) of the three former Japanese space organizations into a single national agency, namely: NASDA (National Space Development Agency of Japan), ISAS (Institute of Space and Astronautical Science), and NAL (National Aerospace Laboratory of Japan).
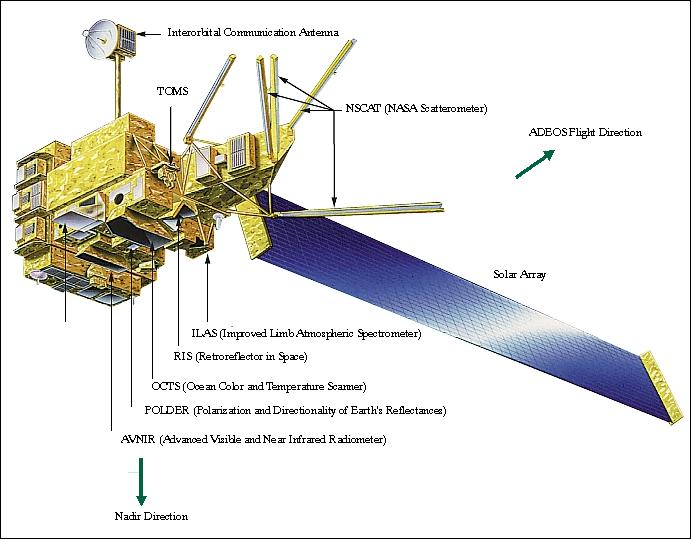
The spacecraft is comprised of a bus with a deployable solar array (one wing).
Satellite mass = 3560 kg at lift-off, payload mass = 1300 kg, power = 4.5 kW, S/C size: 4 m x 4 m x 5 m.
The spacecraft is made up of thermally, electrically and mechanically independent units, which facilitate its integration and testing, including the C&DH (Communications and Data Handling Subsystem), the EPS (Electrical Power Subsystem), and the AOCS (Attitude and Orbital Control Subsystem). 4) 5) 6) 7) 8)
The AOCS employs a three-axis strap-down attitude detection system and a zero-momentum attitude control system, attitude error <0.3º, and attitude stability <0.003º/s. Mission design life=3 years.
The satellite features an automatic, autonomous operation function capable of operating a large number of mission instruments, and inter-orbital communication equipment to transmit observation data via data relay satellite. The IOCS (Inter-Orbital Communication Subsystem) transmits observation data via ETS-VI (Engineering Test Satellite-VI) and COMETS (Communications and Broadcast Engineering Test Satellite).
The ADEOS spacecraft was developed by the Mitsubishi Electric Corporation, Tokyo. NEC Corporation and Toshiba Corporation were subcontractors to Mitsubishi Electric Corporation.
Spacecraft structure | Module type with a deployable solar paddle (one wing) |
Spacecraft launch mass | 3560 kg |
Payload mass | 1300 kg |
Spacecraft power | 4.5 kW |
Spacecraft design life | 3 years |
Spacecraft stabilization | 3-axis stabilized with zero momentum attitude control |
Launch
The launch of ADEOS took place on August 17, 1996, with the H-II launch vehicle from TNSC (Tanegashima Space Center), Japan.
Orbit: Sun-synchronous sub-recurrent polar orbit; apogee = 804.6 km; perigee = 789.0 km; orbital period = 100.8 min, 10:30 AM local sun orbit (on descending node). Ground repeat cycle=41 days (subcycle = 3 days), inclination = 98.625º.
RF communications: ADEOS provides onboard recording (MDR=Mission Data Recorder (three instruments) and LMDR = Low-Speed Mission Data Recorder). Observation data rates: AVNIR (M): 60 Mbit/s, AVNIR (P): 60 Mbit/s, OCTS: 3.0 Mbit/s. Polder: 0.882 Mbit/s. IMG: 0.9 Mbit/s. ILAS: 0.517 Mbit/s. NSCAT: 2.9 kbit/s. TOMS: 0.7 kbit/s.
RF communications: TT&C: Uplink frequency (S-band) = 2.0 GHz (CMD and ranging), downlink frequency = 2.2 GHz (TLM and ranging), command bit rate = 500 bit/s.
Science data transmission: 3 X-band links (8.15, 8.25, 8.35 GHz) with QPSK modulation.
IOCS frequencies: S-band (low rate mission data), Ka-band (120 Mbit/s max).

Mission Status
• September 1997: The ADEOS spacecraft operated successfully for 10 months before experiencing a failure attributed to structural damage in its solar array, leading to a loss of power and termination of operations. Recognizing the significance of the loss for both mission personnel and the data user community, JAXA promptly established a Task Team to investigate the incident. Over the course of three months, the investigation focused on analyzing the solar paddle subsystem (PDL) and the attitude orbit control system (AOCS) to determine the root cause of the failure. 9)
• January 1997: JAXA completed the on-orbit initial checkout of all equipment aboard ADEOS as planned. The satellite began the routine operational phase on November 26, 1996, and the project began providing OCTS and AVNIR standard products for the ADEOS PIs on January 1, 1997. 10)
• August 1996: The critical phase of ADEOS ended after the 22nd revolution on August 19, 1996. JAXA started verifying the functions of the bus system and the mission instruments on that date. The initial mission checkout of ADEOS will continue for 90 days (until the middle of November 1996). 11)
Sensor Complement
OCTS (Ocean Color Temperature Scanner)
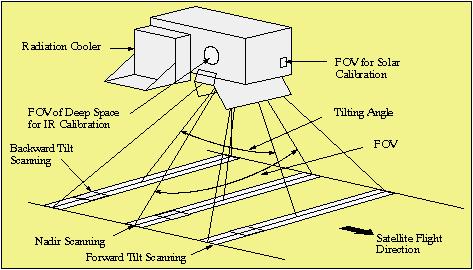
OCTS is a mechanical scanning (whiskbroom) radiometer, and a JAXA (NASDA) core sensor.
Objectives: Ocean colour and sea surface temperature measurements (ocean primary productivity, interaction between the ocean and the atmosphere and environmental studies).
OCTS offers 12 measurement bands from 0.402 - 12.5 µm. Swath width = 1400 km; ±20º along-track tilting.
Spatial resolution: approx. 700 m.
Operation requirements: global observation of the Earth during daytime (TIR channel during the night if required). 12)
Band | Spectral Band | Bandwidth | Radiance | SNR |
1 | 0.402 - 0.422 | 0.020 | 145 | 450 |
|
|
| NEDT |
|
9 | 3.55 - 3.88 | 0.33 | 0.15K |
|
10 | 8.25 - 8.80 | 0.55 | 0.15K |
|
11 | 10.3 - 11.4 | 1.1 | 0.15K |
|
12 | 11.4 - 12.7 | 1.3 | 0.20K |
|
|
|
|
|
|
| IFOV | 0.85 mrad (~700 m) | Quantization | 10-bit/pixel |
| Scanning angle | ~±40º (1400 km) | Tilting angle | -20º, 0º, +20º |
| Polarization | Band 1 ≤ 5% | Calibration VIS/NIR | Solar, internal lights, |
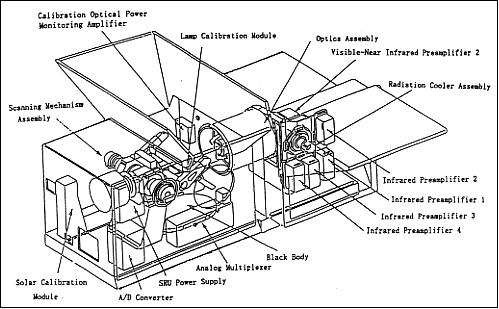
The OCTS sensor consists of a scanning radiometer with an optical system, a detector module and an electrical unit.
OCTS employs a catoptric optical system and a mechanical rotating scanning method with a mirror (due to wide spectral coverage). OCTS can be tilted about the along-track axis to prevent sea surface sun glitter. The IR detectors are cooled to 100 K by a large radiant cooler facing deep space.
Calibration: solar and internal lamp for VNIR, deep space and black body for IR. 13) 14) 15) 16)
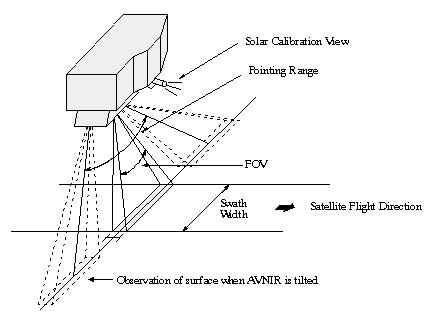
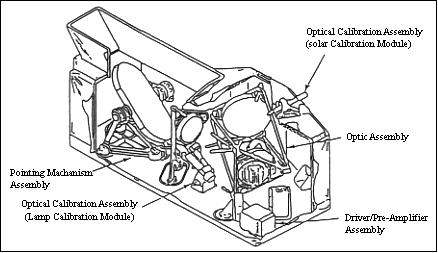
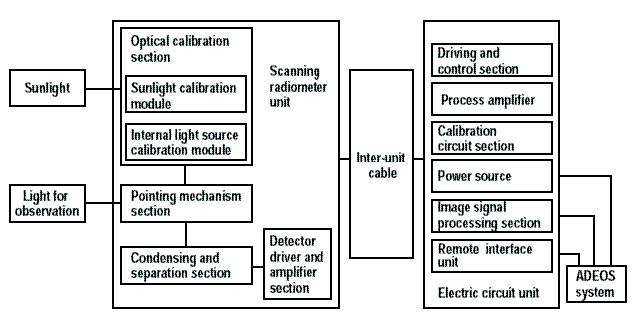
AVNIR (Advanced Visible and Near-Infrared Radiometer)
AVNIR is a NASDA core sensor, an optoelectronic scanning radiometer using CCD detectors. Objective: Land and coastal zone observations, measurement of reflected sunlight from the Earth's surface. AVNIR is comprised of two units, SRU (Scanning Radiometer Unit) containing all the optical components (a catadioptric Schmidt telescope system is used, and the spectrum is dispersed by a prism and interference filter), and ELU (Electronic Unit). 18) 19) 20)
Spectral range: 5 bands from 0.42 - 0.89 µm (multispectral bands: 0.42-0.50, 0.52-0.60, 0.61-0.69 and 0.76-0.89 µm, panchromatic band (visible): 1 band 0.52-0.69 µm).
Spatial resolution: multispectral bands: ~16 m (IFOV=20 µrad), panchromatic band: about 8 m (IFOV =10 µrad). Swath width = 80 km (FOV=5.7º).
Observation requirements: regional observation according to user requests; simultaneous multispectral and panchromatic operation. 21) 22)
The AVNIR instrument has the capability to tilt the observation field by ±40º about the across-track axis. The 0.42-0.50 µm band is useful for coastal zones and lakes. The scanning radiometer unit uses a catadioptric Schmidt optical system (telescope) to reduce aberration in a wide field of view. Calibration of the sensor using solar light and internal lamps.
The radiometric absolute accuracy is ±10%, and the onboard calibration accuracy is ±5%. The large linear array CCDs offer 5,000 and 10,000 detector elements for high spatial resolution.
Instrument mass= 250 kg, power= 300W.

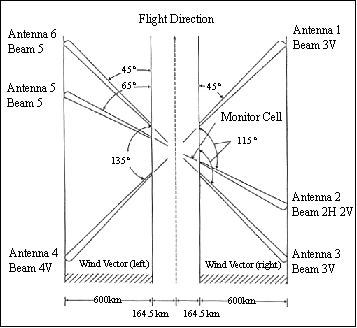
NSCAT (NASA Scatterometer)
NSCAT is a NASA/JPL sensor. Objective: Measurement of surface wind speeds and directions over the global oceans, coverage every two days under all weather and cloud conditions. NSCAT is a microwave radar instrument (a fan-beam Doppler scatterometer), using an array of six antennas that radiate microwave pulses at a frequency of 13.995 GHz across broad regions of the Earth's surface.
An array of six, 3 m long antennas scan two swaths of 600 km width each, one band to each side of the flight path, separated by a gap of 330 km at nadir.
Wind speed accuracy = 2 m/s (rms), direction accuracy = 20º (rms), resolution = 50 km; antenna polarization: 6 V, 2 H; antenna beam width=25º (3 dB broad beam) =0.42º (3 dB narrow beam); instrument mass = 280 kg; power=240 W; data rate = 3.2 kbit/s; peak transmit power=110 W; pulse width=5 ms; PRF=62 Hz.
Operation requirements: continuous operation for global observation of the oceans (about 190,000 wind measurements/day).
Note: NSCAT is an upgraded version of the Radar Scatterometer (SASS) on SEASAT. 23) 24) 25)
NSCAT transmits microwave pulses and receives a backscattered echo from the ocean surface. Changes in wind velocity cause changes in ocean surface roughness, modifying the radar cross-section of the ocean and the magnitude of the backscattered power. Multiple collocated measurements acquired from several directions can thus be used to solve for wind speed and direction simultaneously.
Wind velocity | 2 m/s, 3 - 20 m/s |
Wind direction | 20º (rms), 3 - 30 m/s |
Spatial resolution | 25 km, σo (sigma zero) cells |
Location accuracy | 25 km (rms), absolute |
Coverage | 90% of ice-free ocean surface every two days |
Instrument mass | 280 kg |
Instrument power | 240 W |

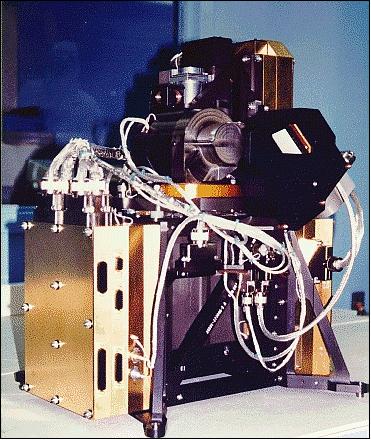
TOMS (Total Ozone Mapping Spectrometer)
TOMS is a NASA/GSFC sensor.
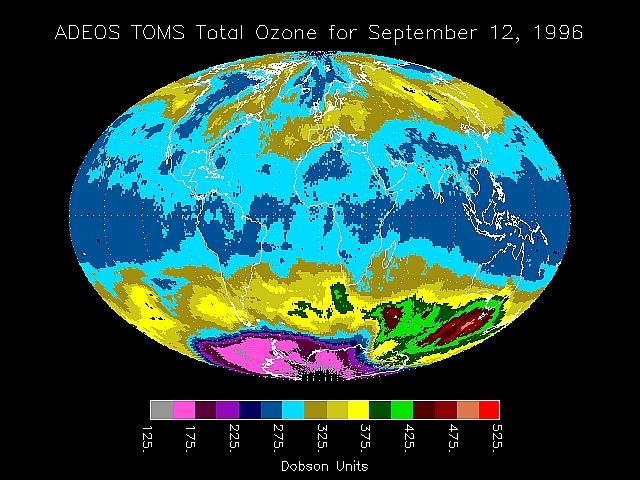
Objective: Observation of total ozone changes, evaluation of changes in UV radiation and the observation of sulfur dioxide.
Measurement wavelengths: 308.6, 312.5, 317.5, 322.3, 331.2 and 360 nm with 1 nm bandpass.
Swath width: 2795 km. IFOV= 50 km at nadir; cross-track scan = 111º (37 3º steps).
Operation requirements: global observation of illuminated part. TOMS mass=34 kg, power=24 W, data rate=700 bit/s.
TOMS measures the albedo of the Earth's atmosphere at six narrow spectral bands in the near-ultraviolet region. The albedo is measured by comparing the radiance of the Earth with the radiance of a calibrated on-band diffuser plate. Total ozone is derived from the differential albedo in three pairs of spectral bands, which are selected to function at all latitudes and solar illumination conditions. 26) 27) 28)
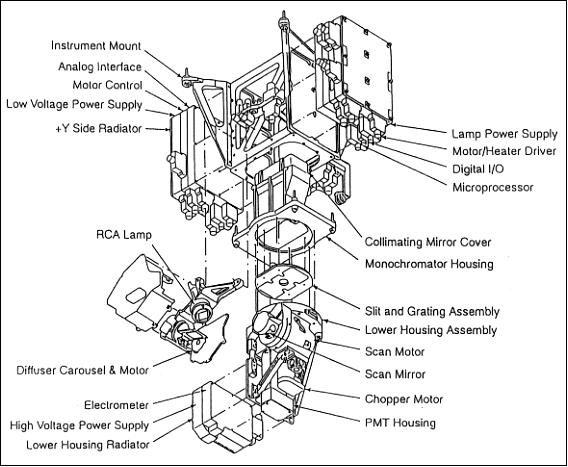
A new feature on ADEOS/TOMS is the ability to monitor solar diffuser reflectance. A device referred to as the RCA (Reflectance Calibration Assembly) was added to the new series of TOMS. This assembly employs a phosphor light source with peak emission over the TOMS wavelength range. When powered on, the lamp illuminates the exposed diffuser surface which is then viewed using the TOMS scan mirror. The scan mirror also rotates to view the phosphor surface directly. The ratio of signals at the two scan mirror positions is a measure of relative diffuser reflectance.
The ADEOS/TOMS has 11 operating modes during normal operations. The most important of these are:
1) Standby mode
2) Scan mode
3) Solar calibration mode
4) Wavelength monitoring mode
5) Electronic calibration mode
6) Reflectance calibration mode
7) Direct control mode.
The primary operating mode of the TOMS is scan mode. It is in this mode that the scanning mirror samples the 37 scenes corresponding to the scanner view angles, measuring the backscattered Earth radiances used for deriving column ozone. During the nighttime portion of the orbit the instrument is placed in standby mode, at which time the scan mirror points into the instrument at a black surface. During solar calibration mode, the scanner moves to view the exposed diffuser surface. The remaining modes are specialized for calibration purposes as the names indicate. The direct control mode is used when overriding the standard instrument modes. On ADEOS/TOMS, the reflectance calibrations were re-defined using direct control.
In the normal Earth scanning mode, ADEOS/TOMS measured the Earth backscatter ultraviolet at the six wavelength channels given in Table 4.
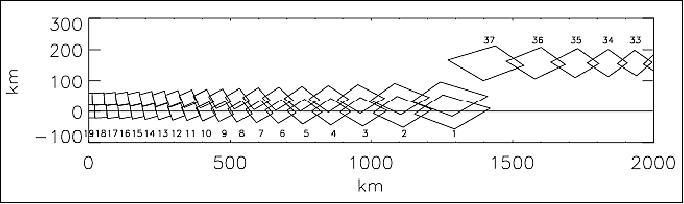
Legend to Figure 13: The right portion (samples 1-19) of two consecutive scans are shown, and a portion of a scan from the previous orbit is also shown to illustrate the inter-orbit coverage at the equator. In descending mode (North to South) ADEOS/TOMS scans West to East.
Wavelength (nm) | Albedo cal constant (steradian-1) | Adjustment factor (ratio) |
308.68 | 0.093 | 1.000 |
321.59 | 0.094 | 1.000 |
317.61 | 0.094 | 1.000 |
322.40 | 0.095 | 1.000 |
331.31 | 0.096 | 1.000 |
360.11 | 0.010 | 1.000 |
ADEOS-TOMS operations, data processing and data distribution are conducted by the Science Operation Center (SOC) at Goddard Space Flight Center. The SOC processes all near-real-time data obtained at US receiving stations and JAXA's EOC (Earth Observation Center). The preliminary Level 3' data set is available to science or operational users via the Internet.
POLDER (Polarization and Directionality of the Earth's Reflectances)
POLDER is a passive optical imaging radiometer of CNES (as a passenger instrument on ADEOS). Objectives: Observation of bidirectionality and polarization of the solar radiation reflected by the atmosphere: tropospheric aerosols (inversion of the physical properties); ocean colour (accurate determination of sea surface reflectances); land surfaces (determination of surface BRDF and improvement in the correction of the surface bidirectional and atmospheric effects on vegetation indices); Earth radiation budget (determination of cloud BRDF and classification of clouds according to their bidirectional properties). POLDER is capable to observe an area from various directions along with the spectral characteristics of the reflected solar light. 30) 31) 32) 33) 34) 35) 36)
a) Measurement of polarized reflectance in VIS/NIR
b) Observation of the Earth's target reflectance from 12 directions during a single S/C pass
c) Operation in two dynamic modes for high SNR and wide dynamic range
Six of POLDER's eight frequencies are optimized for observing atmospheric aerosols, clouds, ocean colour, and land surfaces. The other two frequencies are centred on the H2O and O2 absorption bands for retrieving atmospheric water vapour amount and cloud top height, respectively.
Measurement channels: 15 channels (three channels for each polarized band) Swath width = 1440 km x 2200 (across-track) km, the ground spatial resolution of 7 km x 6 km at nadir.
Data rate: 0.882 Mbit/s, 12-bit quantization.
Operation requirements: global observation of the Earth with more than 15º of solar elevation, simultaneous operation with OCTS.
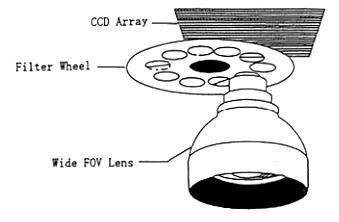
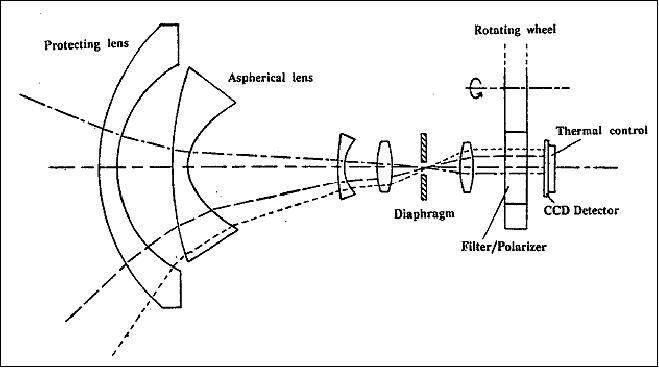
POLDER is a 2-D detector array wide-field-of-view, multi-band imaging radiometer/polarimeter. Multi-angle viewing is achieved by the along-track migration of the S/C of a quasi-square footprint. The optical detection unit of the POLDER consists of a telecentric lens, a rotating wheel supporting filters and polarizers, and a matrix CCD sensor (242 x 548 photoelements, the pixels are binned one by two, resulting in 242 x 274 sensitive areas).
The instrument has a focal length of 3.57 mm, f/4.6, FOV=±43º along-track, FOV=±51º across-track, and FOV=±57º diagonal.
Instrument mass= 33 kg, power=42 W.
Wavelength nm | Bandwidth (nm) | Polarization | Dynamic Range | Main Measurement Objective | |
443 | 20 | no | NA | 0.05-0.22 | Ocean colour |
443 | 20 | yes | 0.05-1.1 | NA | Aerosols, ERB |
490 | 20 | no | NA | 0.034-0.17 | Ocean colour |
565 | 20 | no | NA | 0.019-0.11 | Ocean colour |
670 | 20 | yes | 0.013-1.1 | 0.013-0.27 | Vegetation, aerosols, ERB |
763 | 10 | no | 0.007-1.1 | 0.007-0.25 | Cloud top temperature |
765 | 40 | no | 0.007-1.1 | 0.007-0.25 | Aerosols, CTP |
865 | 40 | yes | 0.007-1.1 | 0.007-0.25 | Vegetation, aerosols, ERB |
910 | 20 | no | 0.007-1.1 | 0.007-0.25 | Water vapour content |
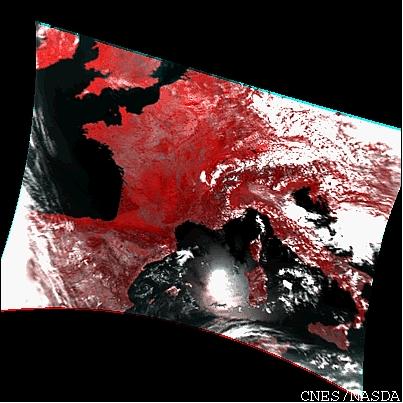
Legend to Figure 18: The image is a blue, green and red colour composite of POLDER measurements at 443 nm, 670 nm and 865 nm. Marked differences appear between the clouds (in white) and different types of surfaces: vegetation in red, soil in brown and yellow, and sea in dark blue. The bright spot in the Mediterranean sea, West of Sardinia, is the sunglint pattern. More than 15000 such images are taken every day by POLDER on ADEOS providing daily global coverage of the Earth in eight spectral channels of the visible and near-infrared spectrum.
IMG (Interferometric Monitor for Greenhouse Gases)
IMG is a MITI-funded sensor developed by JAROS (Japan Resources Observation System Organization), this is a nadir-looking Fourier transform infrared spectrometer (FTIR).
Objectives: Observation of detailed spectra of IR radiation of the Earth's surface and the atmosphere, mapping greenhouse gases on a global scale (CO2, CH4, N2O, H2O and the total ozone mixing ratios of the troposphere).
MITI funded the instrument development. It selected a company developing the sensor, TOSHIBA. JAROS supervised the sensor development. Subsequently, MITI selected the Central Research Institute of Electric Power Industry (CRIEPI) as a consignor for the IMG software system development. 38) 39)
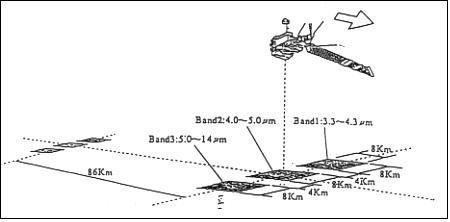
Continuous measurements of the infrared spectrum in the range from 3.3 - 14.0 µm with a very fine spectral resolution of 0.1 cm-1 (apodized) absolute accuracy of measurement=<1 K, stability of measurement<0.1K, IFOV=10 mrad (~64 km2 footprint); vertical resolution about 2-6 km depending on species; interferogram scan time ≤ 10 s.
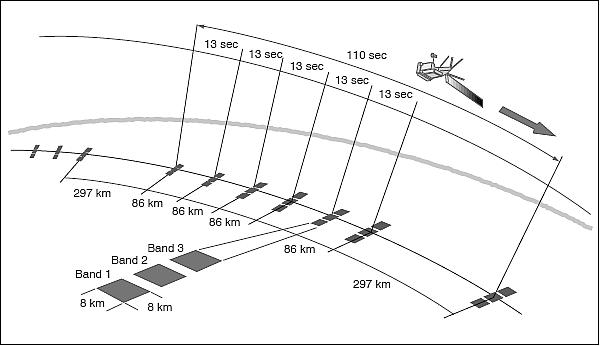
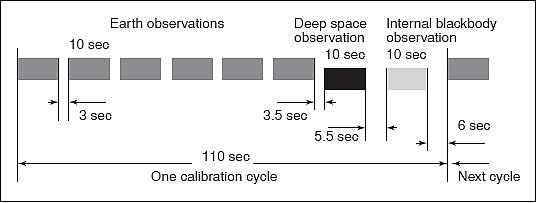
Operation requirements: full-time operation for 3 days out of 13 days. A mechanical cryogenic coolant system is used to regulate the temperature of the quantum detectors. An image motion compensation mirror is used to compensate for the satellite's orbital motion. Measurements are made in 20 km swaths at 8 km resolution.
Spectral range (in 3 bands) | 303 - 714 cm-1 (3.3 - 14.7 µm) |
Band 1 | 3.3 - 4.3 µm |
Nr. of samples | Band 1: 1.6 x 105; band 2 & 3: 1.0 x 105 |
Spectral resolution | < 0.15 cm-1 (band 3); <0.25 cm-1 (band 2) |
Measurement stability | < 0.43 K (band 3); <1.59 K (band 2), < 1.58 K (band 1) |
Data rate | 882 kbit/s |
Instrument mass, power | 130 kg, 150 W |
Instrument size | 1150 mm x 930 mm x 650 mm |
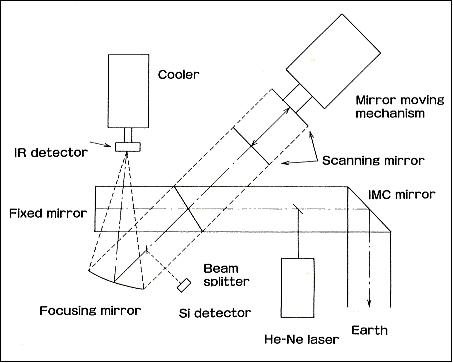
IMG is a Michelson-type Fourier Transform Spectrometer (FTS) with two mirrors and a beam splitter. The incident radiation is divided by the beam splitter into two paths. One mirror is moved so that the two paths produce an interference pattern when recombined. The signal measured by the detector, the interferogram, can be Fourier-transformed to obtain the incident spectrum. The diameter of the entrance aperture is 10 cm. The moving mirror is suspended on magnetic bearings and scans a 10 cm long path in 10 seconds. 40) 41)
Figure 21 shows a schematic of the IMG optical system. The heart of the IMG is the magnetically suspended moving mirror system. The design team studied a bearing system for the linearly moving mirror which had an expected lifetime of three years and selected to develop a magnetic suspension/drive system in order to avoid problems caused by lubrication of the mechanism in a vacuum.
Since the IMG adopted a pair of moving and fixed flat mirrors for the interferometer, the magnetic suspension system not only had to suspend the 10 cm diameter mirror attached to the armature but also enable alignment control in the x- and y-directions of the armature moving in the z-direction to maintain accurate parallelism. The magnetic circuit of the moving mirror armature was composed of an inner yoke, a drive coil fixed to the optics bench, inner permanent magnets at the end of the armature, and the outer armature itself. Eight other suspension electromagnets with eight eddy current-type detection gap sensors were used to suspend and control the armature alignment.
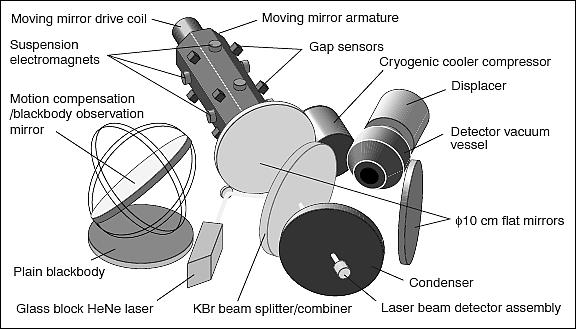
To satisfy the wavelength accuracy requirement of less than 3 x 10-7 in the ratio at 25 ±5ºC for three years, the newly designed HeNe laser made of a glass block with an ultralow thermal expansion coefficient (less than ± 5 x 10-8/K) was used. The laser beam was expanded and injected into the interferometer, and light interference was detected with four Si detectors positioned circumferentially in order to detect the position and the inclination of the moving mirror.
The IMG used three bands with two PV-type InSb detectors for the shorter wavelength range and one PC-type HgCdTe (MCT) detector for the longer wavelength range to cover the required wavelengths between 3.3 µm and 14 µm. The MCT detector is well known to have a nonlinear relation between the input power and the output signal. The ground test showed that nonlinearity arose when the sensor target temperature was higher than 280 K. This effect was compensated for by a quadratic equation at the processing stage of the interferograms in the ground system. The coefficients of the quadratic equation were defined from the results of ground tests.
The cold components, detector focal plane and the shield attached for eliminating the background radiation from the warm optical system, were placed in the vacuum vessel and were thermally combined with the cryogenic cooler displacer. The field of view (FOV) was defined by the size of the detectors as 8 km x 8 km at the ground. Figure 22 shows the outline of the detector component.
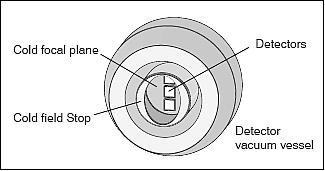
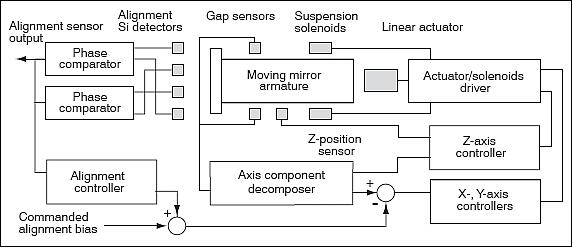
Figure 23 shows the moving mirror alignment and suspension control system diagram. The control system maintained the parallelism of the two mirrors to within 1.9 x 10-4 degrees (0 = peak) throughout the 10 cm length of the moving mirror path. An additional 3 seconds were required for the mirror to return. The alignment control system had double control loops. The basic control loop was controlled by the gap sensors to sustain the initial alignment bias obtained during the startup alignment modes. The second control loop supports the dynamic alignment mechanism that maintains the defined parallelism throughout each observation. The control system was also designed to accept the predefined alignment bias which could be modified by the ground command. This alignment bias defined the offset angle of the moving mirror.
Operational experience of IMG:
The IMG operated continuously day and night, but, was under the basic schedule of 4 days of operation and 10 days of standby. Before the start of the System Initial Checkout, the launch locks for movable parts of the IMG, such as the travelling mirror, were released on September 5, 1996. The Initial Checkout on the IMG unit was performed between September 20 and October 10, 1996. After the functional tests, the first observation was performed on October 10, 1996.
Routine IMG operations began on November 26, 1996. At the beginning of the operation, the moving mirror alignment system occasionally stuck at an anomalous alignment position, resulting in unacceptable degradation of the interferogram. After troubleshooting, it was found that when the moving mirror vibrated, the dynamic alignment system slipped. It was determined that such vibration was induced by the control system’s insufficient gain which was defined in the ground test in which zero gravity was simulated.
The slippage of the dynamic alignment system, which introduced the degradation of data performance (reproducibility, NESR), occurred randomly. Occasionally, the slippage was followed by sticking and caused fatal alignment deviation. It was anticipated that such anomalies could be reduced by adjusting the moving mirror alignment control bias because the control bias was related to the slippage margin. Fortunately, this control bias could be preset through commands given from the ground. Trials to identify the optimum bias continued during routine operations until the end of June 1997, when satellite failure occurred.
Using the IMG, the project was able to measure the Earth’s radiation budget, the surface temperature and atmospheric temperature profiles, and the atmospheric constituents. The operation of the IMG established the validity of the high-resolution, high-throughput interferometer in space. Global maps of the atmospheric constituents were obtained, and the results were very impressive. The atmospheric thermal radiation spectra obtained by the IMG show a good correspondence with the anticipated spectra calculated using the atmospheric optical model (Ref. 38).
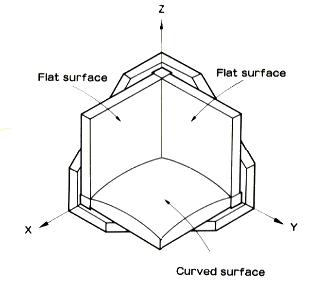
ILAS (Improved Limb Atmospheric Spectrometer)
ILAS is a sensor developed by the Environment Agency of Japan (EA), the heritage of LAS on Ohzora (EXOS-C).
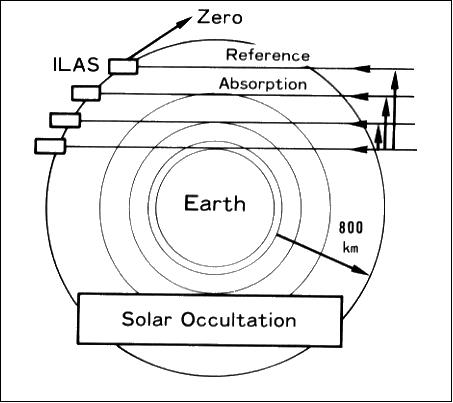
Objectives: Measurement of atmospheric trace gases and the pressure and temperature profiles by the solar occultation technique (vertical profiles of O3, NO2, aerosols, H2O, CFC11, CH4, N2O). ILAS has two grating spectrometers, one is used for the IR-band trace gases, and the other measures aerosols, air temperature and pressure in the VIS-band. The ILAS occultation measurements are performed only at high latitudes in both hemispheres (due to orbit characteristics). ILAS keeps looking at the sun during sunrise and sunset, it measures the sequence of spectral intensity changes in the solar light which passes through the various tangent heights of the atmosphere. Since atmospheric trace gases have their own characteristic absorption spectra, the concentration of gases can be derived from these absorption measurements. 42), 43), 44) 45) 46) 47)
Spectrometer | 2 grating spectrometers (VIS and IR) with linear array detectors |
Spectral coverage | 44 infrared channels in the range from 6.21-11.77 µm (850-1610 cm-1) |
Telescope | Cassegrain, 12 cm diameter |
Sun tracker | Pointing mirror: 18 x 18 cm; sun edge sensor: 512 element array |
IFOV (at tangent height) | IR channels: 2 km (vertical) x 13 km (horizontal) |
Observation parameters | O3, HNO3, NO2, N2O, H2O, CFC-11, CH4, aerosols, pressure, air temp. |
Observation region | Latitudinal zones 56º - 70º N and 63º - 88º S |
Data rate | 517 kbit/s, sampling rate at 12 Hz |
Instrument operation | 10 minutes per occultation (limb observations) |
ILAS mass, power, size | 130 kg, 78 W, 800 x 1630 x 550 mm |
Table 7: ILAS instrument parameters
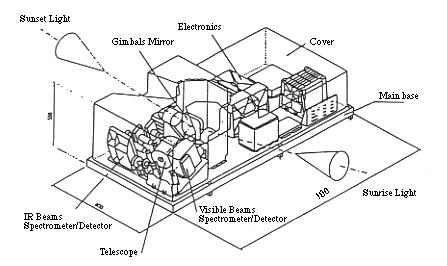
RIS (Retroreflector in Space)
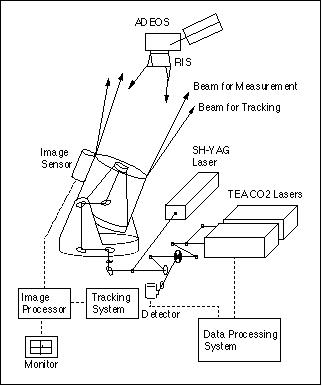
RIS is a JEA (Japan Environmental Agency) funded sensor. RIS is a large aperture single-element corner-cube reflector for Earth-satellite-Earth laser long-path absorption measurements of atmospheric trace gases. The RIS experiment was the first implementation of the laser long-path absorption method between the ground and a satellite. 48) 49)
Objective: Used for laser long-path absorption measurements of atmospheric trace species and to support two color laser ranging experiments. Measurements of ozone (O3), CFC12, HNO3, methane (CH4), CO, and other gases by the laser beam absorption technique. Wavelength range: 0.4 - 14 µm.
In the RIS experiments a laser beam is transmitted from a SLR ground station, reflected by RIS, and received back at the ground station. The absorption of the intervening atmosphere is measured in the round-trip optical path (measurement of absorption spectra by the Doppler shift of the reflected beam). The column contents and vertical profiles of atmospheric trace gases are obtained from the measured spectra. The RIS experiments are performed when ADEOS passes over the ground stations in Japan. The ground stations use two single-longitudinal-mode TEA-CO2 lasers for the spectroscopic measurements. 50) 51) 52) 53)
RIS has a hollow reflector structure with an effective diameter of 0.5 m. A spherical mirror with a very small curvature is used for one of the three mirrors forming the corner cube, in order to optimize the ground pattern of the beam reflected by RIS. Instrument mass=43 kg.
ADEOS carries in addition TEDA (Technical Engineering Data Acquisition Equipment) to measure the space environment surrounding the S/C. TEDA monitors radiation absorption, memory malfunction, static charge voltage, and contamination, and analyzes heavy ions.
References
1) NASDA handout at the CEOS WGD-10 Meeting in Annapolis MD, April 16-19, 1991
2) http://www.jaxa.jp/projects/sat/adeos/index_e.html
3) http://suzaku.eorc.jaxa.jp/GLI2/adeos/Earth_View/index.html
4) “ADEOS,” NASDA brochure, 1993
5) “Special issue on ADEOS,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 37, No 3, May 1999, Part II of two parts
6) http://www.eorc.jaxa.jp/en/hatoyama/satellite/satdata/adeos_e.html
7) http://kuroshio.eorc.jaxa.jp/ADEOS/index.html
8) http://suzaku.eorc.jaxa.jp/GLI2/adeos/images.html#FirstImages
9) Haruhisa Shimoda, “ADEOS Malfunction,” ADEOS Newsletter No 7, July 4, 1997, URL: http://suzaku.eorc.jaxa.jp/GLI2/adeos/NewsLetters/newsletter7/MALFUNCTION.html
10) Tasuku Tanaka, “JAXA starts providing data to ADEOS PIs,” ADEOS Newsletter No 5, Jan. 10, 1997, URL: http://suzaku.eorc.jaxa.jp/GLI2/adeos/NewsLetters/newsletter5/providing.html
11) Haruhisa Shimoda, “Report of ADEOS Initial Mission Checkout,” URL: http://suzaku.eorc.jaxa.jp/GLI2/adeos/NewsLetters/newsletter4/checkout.html
12) “Ocean Color and Temperature Scanner (OCTS),” http://suzaku.eorc.jaxa.jp/GLI2/adeos/Project/Octs.html
13) Jun Tanii, Tsuneo Machida, Haruki Ayada, Yoshihiko Katsuyama, Juro Ishida, Nobuo Iwasaki, Yoshio Tange, Yuji Miyachi, Ryouta Satoh, “Ocean color and temperature scanner for ADEOS,” Proceedings of SPIE, 'Future European and Japanese Remote-Sensing Sensors and Programs,' Vol. 1490, 200 (1991), Orlando, FL, USA, April 1991, doi:10.1117/12.46625
14) B. Carol Johnson, F. Sakuma, J. J. Butler, S. F. Biggar, J. W. Cooper, J. Ishida, K. Suzuki, “Radiometric Measurement Comparison Using the Ocean Color Temperature Scanner (OCTS) Visible and Near Infrared Integrating Sphere,” Journal of Research of the National Institute of Standards and Technology, Volume 102, Number 6, November–December 1997, URL: [web source no longer available]
15) Futoki Sakaida, Masao Moriyama, Hiroshi Murakami, Hiromi Oaku, Yasushi Mitomi, Akira Mukaida, Hiroshi Kawamura, “The Sea Surface Temperature Product Algorithm of the Ocean Color and Temperature Scanner (OCTS) and Its Accuracy,” Journal of Oceanography, Vol. 54, pp. 437-442,. 1998, URL: https://web.archive.org/web/20200919090200/http://www.terrapub.co.jp/journals/JO/pdf/5405/54050437.pdf
16) M. Shimada, H. Oaku, Y. Mitomi, H. Murakami, H. Kawamura, “Calibration of the ocean color and temperature scanner,” IEEE Transactions on Geoscience and Remote sensing, Vol. 37, Issue 3, May 1999, pp. 1484-1495, URL: [web source no longer available]
17) http://www.eorc.jaxa.jp/en/hatoyama/etc/images/adeos_first/octs_ir_e3.html
18) “Advanced Visible and Near-Infrared Radiometer (AVNIR),” URL: http://www.eorc.jaxa.jp/ADEOS/Project/Avnir.html
19) Kohei Arai, “Results from the Vicarious Calibration of ADEOS/AVNIR and the Visible and Near-Infrared Channels of OCTS with AVIRIS,” URL: ftp://popo.jpl.nasa.gov/pub/docs/workshops/01_docs/2001Arai_web.pdf
20) Yoshifumi Yasuoka, Masao Naka, Yuji Miyachi, “Advanced visible near-infrared radiometer (AVNIR),” Proceedings of SPIE, 'Advanced and Next-Generation Satellites,' Hiroyuki Fujisada; Martin N. Sweeting, Editors, Vol. 2583, Dec. 1995, DOI: 10.1117/12.228563
21) http://www.eorc.jaxa.jp/en/hatoyama/etc/images/adeos_first/avnir_mu_e.html
22) Kazuyoshi Takahashi , Makoto Ono, “Extraction of precise attitude by means of image navigation channel data of AVNIR,” International Archives of Photogrammetry and Remote Sensing, Vol. XXXI, Part B1, Vienna, 1996, URL: http://www.isprs.org/proceedings/XXXI/congress/part1/187_XXXI-part1.pdf
23) F. M. Naderi, M. H. Freilich, D. G. Long, “Spaceborne Radar Measurement of Wind Velocity Over the Ocean - An Overview of the NSCAT Scatterometer System,” Proceedings of IEEE, Vol. 79, No. 6, June 1991, pp. 850-866
24) “NASA Scatterometer (NSCAT),” URL: http://www.eorc.jaxa.jp/ADEOS/Project/Nscat.html
25) https://web.archive.org/web/20210323120537/winds.jpl.nasa.gov/missions/nscat/index.cfm
26) Arlin J. Krueger, P. K. Bhartia, Richard D. McPeters, Jay R. Herman, Charles G. Wellemeyer, Glen Jaross, Colin J. Seftor, Omar Torres, Gordon Labow, William Byerly, Steven L. Taylor, Tom Swissler, Richard P. Cebula, “ADEOS Total Ozone Mapping Spectrometer (TOMS) Data Products User's Guide,” NASA, 1998, URL: http://jwocky.gsfc.nasa.gov/datainfo/adeos_userguide.pdf
27) http://jwocky.gsfc.nasa.gov/adeos/adsat.html
28) A. J. Krueger, G. Jaross, “TOMS/ADEOS instrument characterization,” IEEE Transaction on Geoscience and Remote Sensing, Vol. 37, No 3, May 1999, pp. 1543-1549
29) https://web.archive.org/web/20130821101535/http://landsat.gsfc.nasa.gov/?page_id=11Sect14/Sect14_9.html
30) P. Y. Deschamps, F. M. Bréon, et al., “The POLDER mission: Instrument characteristics and scientific objectives,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 32, No 3, 1994, pp. 598-615, URL: http://www.obs-vlfr.fr/LOV/OMT/fichiers_PDF/Deschamps_et_al_IEEE_TGRS_94.pdf
31) P. Y. Deschamps, M. Herman, A. Podaire, M. Leroy, M Laporte, P. Vermande, “A Spatial Instrument for the Observation of Polarization and Directionality of Earth Reflectances: POLDER,” IGARSS '90 Conference Proceedings, Washington, D. C.
32) M. Leroy, J. L. Deuze, F. M. Breon, O. Iiautecoeur, M. Herman, J. C. Buriez, D. Tanre, S. Bouffies, P. Chazette, J. L. Roujean, “Retrieval of atmospheric properties and surface bidirectional reflectances over land from POLDER/ADEOS,” Journal of Geophysical Research, Vol. 102, No D14, July 27, 1997, pp: 17,023-17,037, URL: http://www.gps.caltech.edu/~vijay/Papers/BRDF/leroy-etal-97.pdf
33) M. Leroy, A. Lifermann, “The POLDER Instrument Onboard ADEOS: Scientific Expectations and First Results,” Advances in Space Research, Vol. 25, No 5, 2000 , pp. 947-952
34) Anne Lifermann, Pierre-Yves Deschamps, Cyril Moulin, Annick Bricaud, “POLDER and Ocean Color,” URL: http://www.ioccg.org/reports/polder/polder.html
35) Helene Chepfer, Philippe Golomb, James Spinhirne, Pierre H. Flamant, Mario Lavorato, Laurent Sauvage, Gerard Brogniez, Jacques Pelon, “Cirrus Cloud Properties Derived from POLDER-1/ADEOS Polarized Radiances: First Validation Using a Ground-Based Lidar Network,” Journal of Applied Meteorology, Volume 39, pp.154-168, URL: http://journals.ametsoc.org/doi/pdf/10.1175/1520-0450%282000%29039%3C0154%3ACCPDFP%3E2.0.CO%3B2
36) J. L. Deuze, F. M. Breon, C. Devaux P. Goloub, M. Herman, B. Lafrance, F. Maignan, A. Marchand, F. Nadal, G. Perry, D. Tanre, “Remote sensing of aerosols over land surfaces from POLDER-ADEOS–1 polarized measurements,” Journal of Geophysical Research, Vol. 106, No D5, pp. 4913-4926, March 16, 2001, URL: http://www.atmos.umd.edu/~zli/METO401/AOSC625/Readings/Aerosol/Deuze%20POLDER_JGR2001.pdf
37) “Joint JAXA-CNES Press Release: The First POLDER on ADEOS Data,” Oct. 2, 1996, URL: http://www.eorc.jaxa.jp/en/hatoyama/etc/images/adeos_first/polder_first_e.html
38) Hirokazu Kobayashi, “Interferometric Monitor for Greenhouse Gases,” Project Technical Report, March 30, 1999, URL: http://www.eorc.jaxa.jp/AtmChem/IMG/IMG_tech_report.pdf
39) http://www.eorc.jaxa.jp/AtmChem/IMG/
40) H. Kobayashi, T. Ogawa, et al., “IMG, precursor of the high-resolution FTIR on the satellite,” SPIE Proceedings, Vol. 3501, Optical Remote Sensing of the Atmosphere and Clouds, Beijing, Sept. 15-17, 1999, pp. 23-33
41) Haruhisa Shimoda, Toshihiro Ogawa, “Interferometric monitor for greenhouse gases (IMG),” Proceedings of SPIE, 'Sensors, Systems, and Next-Generation Satellites,' Hiroyuki Fujisada, Editors, Vol. 3221, Dec. 1997, DOI: 10.1117/12.298071
42) “Upper Atmosphere Monitoring with ADEOS - ILAS and RIS,” EA/NIES brochure provided by Y. Sasano of NIES
43) “Ozone Layer Observation by Satellite Sensors,” Proceedings of the International Workshop on Global Environment and Earth Observing Satellite Sensors, December 8-9, 1993, Tokyo, Japan
44) Y. Sasano, et al. , “ILAS and RIS for ADEOS,” SPIE, Vol. 1490 , 1991, pp. 233-242
45) “Improved Limb Atmospheric Spectrometer (ILAS),” URL: http://www.eorc.jaxa.jp/ADEOS/Project/Ilas.html
46) T. P. Kurosu, K. Chance, T. Yokota, Y. Sasano, “Polar Stratospheric Cloud Detection from the ILAS Instrument,” URL: https://www.cfa.harvard.edu/~tkurosu/Papers/SPIE-PSC.pdf
47) Yasuhiro Sasano, Makoto Suzuki, Tatsuya Yokota, Hiroshi Kanzawa, “Improved limb atmospheric spectrometer (ILAS) project: ILAS instrument, performance, and validation plan,” Proceedings of SPIE, 'Advanced and Next-Generation Satellites,' Hiroyuki Fujisada; Martin N. Sweeting, Editors, Vol. 2583, pp. 193-204, Dec. 1995, DOI: 10.1117/12.228564
48) “RIS Retroreflector In Space Home Page,” NIES, URL: http://www-lidar.nies.go.jp/RIS/index0-e.htm
49) Nobuo Sugimoto, Nobuhiko Koga, Ichiro Matsul, Yashiro Sasano, Atsushi Minato, Kenichi Ozawa, Yasunori Saito, Akio Nomura, Tetsuo Aoki, Toshikazu Itabe, Hiroo Kunimori, Isao Murata, Hiroshi Fukunishi, “Earth-satellite Earth laser long-path absorption experiment using the Refelctor in Space (RIS) on the Advanced Earth Observing Satellite (ADEOS),” Journal of Optics A: Pure Applied Optics 1, 1999, pp. 201-209, URL: http://www-lidar.nies.go.jp/RIS/RISJOptA99.pdf
50) M. Maeda, M. Ogawa, M. Sawabe, M. Hirota, H. Kunimori, “Accuracy of trajectory determination and prediction of ADEOS with RIS experiment,” Proceedings of SPIE, Vol. 3218, pp. 31-39, `Laser Radar Ranging and Atmospheric Lidar Techniques,' Ulrich Schreiber, Christian Werner, Eds., Dec. 1997
51) Kenichi Ozawa, Nobuhiko Koga, Nobuo Sugimoto, Tetsuo Aoki, Toshikasu Itabe, Hiroo Kunimori, Atsushi Minato, Yasuhiro Kubota, Yasunori Saito, Akio Nomura, “Optical characteristics of the Retroreflector in Space (RIS) on the ADEOS satellite,” Proceedings of SPIE, Vol. 3218, pp. 2-9, `Laser Radar Ranging and Atmospheric Lidar Techniques,' Ulrich Schreiber, Christian Werner, Eds., Dec. 1997
52) “Retroreflector-In-Space for ADEOS: Earth-Space-Earth Laser Long-Path Absorption Measurements of Atmospheric Trace Species,” Optical Remote Sensing of the Atmosphere, 1990 Technical Digest Series of the Optical Society of America, Volume 4, pp. 488-490
53) A. Minato, N. Sugimoto,, S. Sasano, “Optical Design of Cube-Corner Retroreflectors Having Curved Mirror Surfaces,” Applied Optics, Vol. 31, 1992, pp. 6015-6020