ABEX (Alabama Burst Energetics eXplorer) CubeSat Mission
Non-EO
Planned
Quick facts
Overview
| Mission type | Non-EO |
| Mission status | Planned |
ABEX (Alabama Burst Energetics eXplorer) CubeSat Mission
Payload Design Development Status Spacecraft Launch Ground Station References
The ABEX project is a 12U CubeSat scientific and educational mission to investigate Gamma-Ray Bursts (GRB) through spectral analysis and localization of joint gravitational-wave GRB mergers using wavefront timing analysis. The project is in development by a multi-university collaboration across Alabama with design work conducted by students under faculty advisement. The effort is organized and funded by the Alabama Space Grant Consortium (ASGC) and includes the University of Alabama, University of Alabama in Birmingham, University of South Alabama, Auburn University, and the University of Alabama in Huntsville. 1) 2)
ABEX will deploy on a super-synchronous orbit and propulsively maneuver to a high eccentricity orbit of 300 km perigee by 60,000 km apogee at 27º inclination. From this high apogee destination, ABEX will observe GRB events using a suite of detectors that measure a broad energy range from keV to MeV. The highly eccentric orbit allows ABEX to perform wavefront timing between LEO gamma-ray missions as it passes through apogee. ABEX has several engineering systems being developed by cohort universities as part of its educational mission, specifically the On-Board Computers, Electrical Power System, Flight Software, chassis, and instrumentation.
Program Overview
In 2018 the Alabama Space Grant Consortium (ASGC) began a statewide CubeSat Initiative to foster aerospace engineering and space systems research across the state of Alabama. The first project under this initiative began as a call for mission proposals for future opportunities on SLS (Space Launch System) as a secondary payload on what is now Artemis II. A group of faculty and researchers formed around this endeavor, and a mission was proposed to NASA in 2019 through CSLI (CubeSat Launch Initiative). After submitting the proposal, the flight opportunity was cancelled by NASA in 2020. The team refocused towards a new gamma-ray mission called the Alabama Burst Energetics eXplorer (ABEX). This mission brings together universities and experience set from across the state as shown in Table 1.
University | Project Role |
University of Alabama in Huntsville (UAH) | Management, System Engineering, Science & Payload |
University of Alabama (UA) | Power Systems, Command & Data Handling |
Auburn University (AU), Auburn, Alabama | Orbital Analysis, Flight Software, Structures and Mechanisms, |
University of South Alabama (USA) | Guidance & Navigation Systems, Communications |
Tuskegee University (TU), Tuscaloosa, | Structural Design |
As part of the Alabama CubeSat Initiative, ABEX involves university students in all levels of its development and management. To date the program has included over 150 undergraduate students with 7 active graduate students, and 7 faculty. The program is also mentored by a large team of subject matter experts from industry, Marshall Space Flight Center (MSFC), Goddard Space Flight Center (GSFC), Jet Propulsion Lab (JPL), and industry experts.
ABEX has currently entered phase A work with the completion of its Mission Concept Review in the Spring of 2021.
Science Mission
The scientific goal of ABEX is to study Gamma-Ray Bursts (GRBs). GRBs are highly energetic astrophysical events occurring across the universe that are random in time and isotropic in space. These events begin with a prompt emission that peaks in the gamma-ray regime (50-500 keV) and lasts anywhere from seconds to minutes, followed up by an afterglow period of lower energy emission lasting hours to months. GRBs are delineated into two kinds: short (sGRBs) and long (lGRBs).
- sGRBs are believed to be from compact object mergers such as a pair of in-spiraling neutron stars or a neutron star-black hole collision. Notably, the first joint detection of such an event occurred recently in 2017 with GRB 170817A and GW170817. 3)
- lGRBs are believed to originate from collapsing high mass stars at the end of their life. In both types of GRBs, the emission is thought to be in the form of a relativistic jet of outflowing matter which interacts with itself and the external environment surrounding the GRB to generate the observed prompt and afterglow emission.
ABEX seeks to enable several points of ongoing GRB research the first being to understand the production mechanisms of GRBs by expanding the current detection range into low energies under 15 keV. One of the current challenges facing GRB research is that empirical fitting of spectra, such as from the common Band function, 4) has led to a stagnation in connecting theory with observation. An immediate step in addressing this is the addition of physically motivated models, the simplest of these being a thermal component. Thermal emission has been proposed in many theories of GRB emission; however, its detection has been limited by both the process of forward folding techniques used in spectral analysis and the limited range of detectors. 5) Better detection of thermal components can also provide improved constraint into the interplay between magnetically dominated conditions versus thermal sourcing. ABEX will enhance this research by detecting the lower energy emission, which is currently underexplored, and help constrain the spectral fits of GRBs by increasing the overall dynamic range of current detection with the possibility to find undiscovered lower energy thermal components.
The other enabling research that ABEX will contribute to is rapid localization of possible sGRBs and Gravitational Wave (GW) events through wavefront timing. The joint detection of GWs and GRBs in 2017 offered the first confirmation that sGRB progenitors are from binary mergers as had been theorized. In addition, this event was the first ever multi-messenger astronomy campaign with electromagnetic and gravitation measurements. These kinds of dual observations allow us to probe fundamental physics further with methods that peer into the heart of these astrophysical events. However, these events are currently rare detections, and the second joint observation has yet to be seen. For these joint events, the afterglow of the GRB is an important element in determining specific details that the prompt emission does not reveal, such as the redshift (distance of the event) or inferences of the jet angular size and observing angle. For afterglow science it is critical to start observation right after the prompt emission before the source decays. The challenge is that while some missions, such as Swift, can provide very precise localization, others with better field of view and sensitivity, like Fermi-GBM, have a larger localization error. This means that a follow up optical or X-ray observation with these large localization areas must search the sky to identify the specific source object and in so doing can miss valuable event data or possibly the entire afterglow period. 6)
ABEX will enable this afterglow research for joint GRB and GW events by measuring the timing delay of a GRB wavefront as it impacts ABEX and other detectors on-orbit and generating a location annulus which, when combined with other localizations, will result in a significant reduction in the overall search area and thus a faster response time for follow-up science.
Educational Mission
Along with the science mission of ABEX, educational return is a high priority for the Alabama CubeSat Initiative. This goal is codified into the project through a series of learning objectives:
• Learning Objective 1 (LO1): Provide educational opportunities with academic engagement for students on an actual aerospace system through experience with large, collaborative, and diverse teams that are geographically and organizationally dispersed.
• Learning Objective 2 (LO2): Develop in-house engineering solutions for ABEX lead by student design teams.
• Learning Objective 3 (LO3): Provide graduate students with early-career leadership roles in the project and system management roles.
• Learning Objective 4 (LO4): Facilitate continuous engagement with ASGC universities in the engineering and management of the project.
• Learning Objective 5 (LO5): Publish work on ABEX to conferences and journals.
ABEX has sustained engagement with 6 universities within the state of Alabama to achieve these goals. In the spacecraft design, several systems have selected in-house solutions over COTS options to be developed by students. Each subsystem is led by a university faculty member or graduate student with an undergraduate student team, often as a senior design class. The project leadership is helmed by a team of graduate students working in the roles of Project Manager, Chief Engineer, and Lead Systems Engineer.
Operations Concept
To enable the ABEX science mission of wavefront timing for sGRB detection, a sufficient distance between existing detectors, called a baseline, must be provided which can allow a substantial timing differential between detections. While in principle this detection is possible in LEO, practically it is very challenging, requiring a significant number of spacecrafts. Conversely, achieving a lunar orbit would be ideal for long baselines but lacking immediate and cost-effective launch options. Following a concept study, it was decided a highly eccentric orbit would be the best option to allow wavefront timing from apogee while being accessible as a secondary payload through opportunities like CSLI. A super-synchronous deployment orbit including a small maneuvering thruster was selected, with baseline orbital parameters shown in Table 2.
Orbit | Perigee | Apogee | Inclination |
Super-Synchronous Deployment | 185 km | 60,000 km | >27º |
Science Target Orbit | 300 km | 60,000 km | >27º |
With a super-synchronous deployment, ABEX will have operational flexibility during its initial mission phase as the low-thrust burn durations individually are small, allowing for corrections and updates between each one. Assuming an apogee burn per orbit, the deployment to science orbit will take fewer than two months depending on burn duration. When decommissioning, ABEX will perform both apogee and perigee burn maneuvers to decrease the perigee, allowing for atmospheric drag to dominate the de-orbit process. In Table 3 the STK-modeled ΔV and propellant usage for the mission for the thruster is shown (thruster is discussed later in the propulsion section). It should be noted that Tsiolkovsky’s rocket equation is not directly applicable for low-thrust maneuvers such as these.
Maneuver | Total ΔV (m/s) | Total propellant used (g) |
Science Orbit Perigee Raising | 40 | 9 |
Station keeping | 85 | 28.6 |
Deorbit | 55 | 23 |
There are Five Phases to the ABEX Mission
Launch and early operations, orbital maneuvering, science commissioning, science operations, and decommissioning. Launch and early operations includes solar array deployment, detumble, and initial communications. Orbital maneuvering phase enacts the perigee-raising maneuver. Science commissioning phase performs the on-orbit calibration and orbital assessment to determines the altitude at which Van Allen Belt (VAB) trapped particle radiation is low enough for science observations. Science operations is that start of main observation periods for GRB events. Decommissioning phase is the final apogee lowering and perigee raising to increase atmospheric drag and de-orbit within two months.
For all mission phases except decommissioning, the spacecraft will be in a safety state during both outbound and inbound VAB crossing. The satellite will enter a sun pointing state where batteries are charging, but little else occurs. The attitude determination and control systems would be on to ensure control stability, but the science instruments, radio, and many computational processes will be off as a precautionary measure.
For the science operations the GRB event data must be downlinked within eight hours to facilities the joint sGRB and GW science. ABEX will collect raw event data and store it within an onboard buffer and mark potential regions in the buffer that pass an internal threshold based on the background rate. Simultaneously, ground support systems will be monitoring both GW and GRB detector networks for possible events which occur during the science periods of ABEX. Right before the communication window begins, regions of interest containing possible science data can be requested as an uplink command from the ground teams to ABEX. Regardless of event detection, ABEX will initiate a downlink before the inbound VAB crossing to transmit health diagnostics data. No transmissions are planned during VAB crossings or perigee operations. A summary of the ABEX mission phases and durations are described in Table 4.
Mission Phase | Activity Description | Duration |
LEOP (Launch & Early Operations) | Deployment of solar arrays, detumble, | 1 week |
Orbital Maneuvering | Apogee thrusting to raise the perigee | 2 months |
Science Commissioning | On-orbit calibration of instruments | 1 month |
Science Operations | Detection of GRB events at | 12 months |
Decommissioning | Thrusting to lower perigee | 2 months |
While the super-synchronous orbit minimizes the ΔV required by ABEX, the expected inclinations offered by typical rideshares puts the mission on a regular passage through the outer regions of the VABs. While operational safety measures are taken for safety states during this period, the overall exposure poses a significant radiation risk to the mission that must be additionally mitigated by SEE (Single Event Effect) tolerant system design and by shielding.
Payload Design
GRD (Gamma-ray Detector)
The GRD utilizes a standard crystal scintillator readout by light sensors. The current design uses an array of Silicon Photomultipliers (SiPMs) as the light sensor; this is currently under study as the radiation environment impacts the dark current of SiPMs significantly. Either a shift to PMTs or the addition of sector shielding will be implemented. The crystal scintillator will be sensitive to the main prompt emission energy of GRBs and have a wide field-of-view and an approximately cosine falloff in effective area from the normal vector. The general mechanical design is shown in Figure 1.
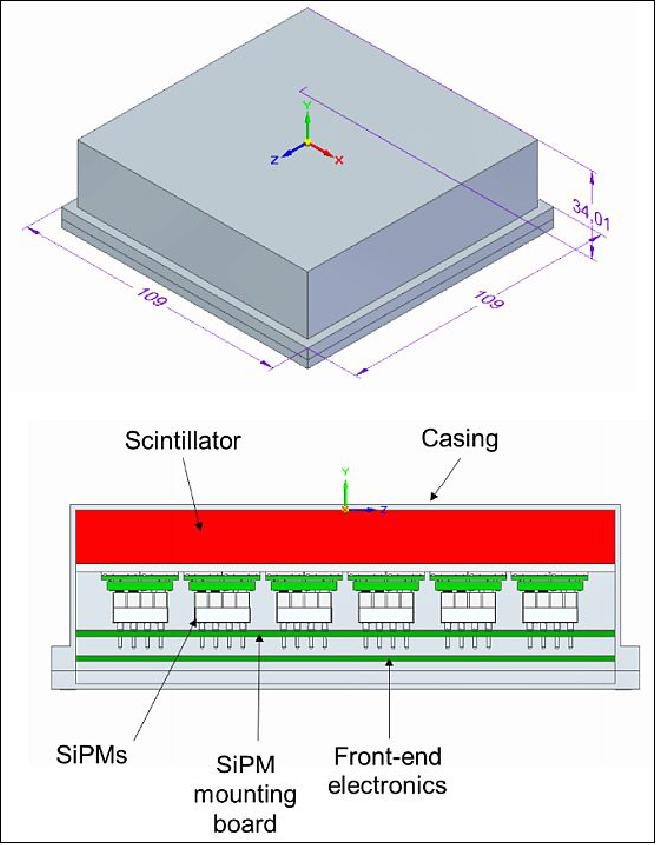
The current design of the GRD uses Cesium Iodide (CsI) as the scintillation material, although this is subject to change. Surrounding the CsI is a thin casing which contains the light sensors that are mounted to the large face of the detector for maximum light collection. Below the SiPMs are the Front-End Electronics (FEE) boards which convert the current sources of the SiPMs into voltage which is then passed to the Payload Interface Unit (PIU) that performs the final signal processing for energy determination and time stamping. The PIU also provides the power supply for the FEE and SiPMs.
In summary the GRD unit will provide the main detection of the peak emission of GRBs and be used as the primary detector for wavefront timing and the trigger mechanism for wide band detection and spectroscopy. A list of major parameters of the GRD are shown in Table 5.
Parameter | Value (per detector unit) |
Mass | 4,026 g |
Power | 2.245 W (BOL) |
Volume | ~34 x 109 x 109 cm3 |
Effective area | ~95 cm2 (peak) |
FOV (Field of View) | 30 % sky |
Sensitive range | 15 keV – 1 MeV |
XRD (X-ray Detector)
The XRDs are a unique element for ABEX and will target the low energy prompt emission component of GRBs. The challenge of observing GRBs is that the prompt emission is often brief and its location unpredictable. Thus, an XRD must have a wide field-of-view but maintain a low enough background for source recovery. To overcome this ABEX employs an array of large-area Si-PIN sensors with collimators for background reduction. These XRDs will not provide imaging or localization capability but will rely on the joint detection with the GRD and the brightness of GRBs above the background to perform spectral science.
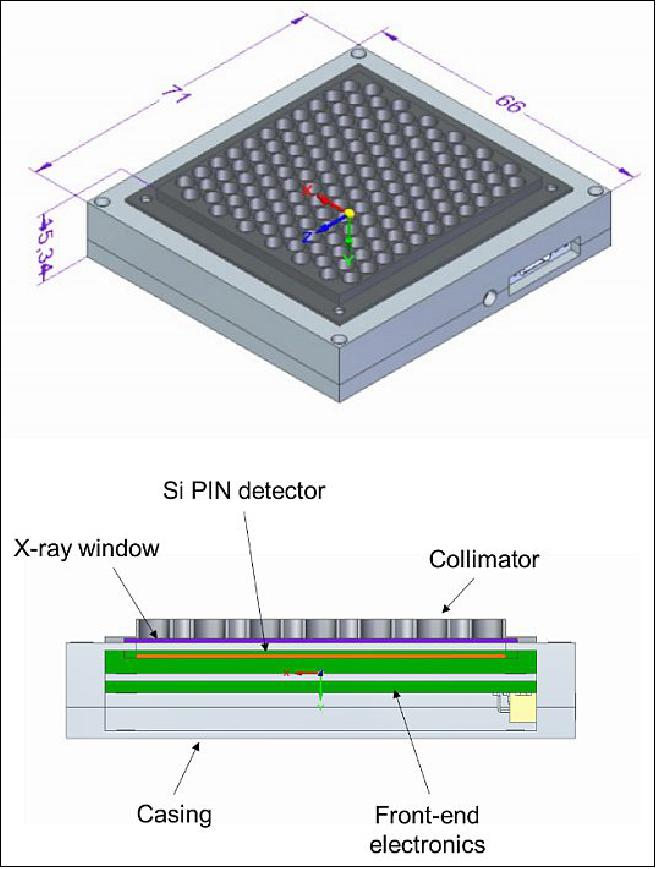
In summary, the XRD will provide a unique detection ability of 2-15 keV of the GRB prompt emission addressing the low energy spectroscopy goals of ABEX. In Table 6 is a summary of the main values for the current XRD design.
Mass | 125 g |
Power | 0.45 W |
Volume | ~15.3 x 71 x 66 cm3 |
Effective area | 17 cm2 (peak) |
FOV | 3% sky |
Sensitive range | 2 keV – 15 keV |
PIU (Payload Interface Unit)
The PIU is last step in signal processing and is the main power and data interface for the XRD and GRD units to the spacecraft. To determine the energy of events, ABEX is using a pulse height analysis unit from Amptek called the DP5G, which is operated in a list mode to provide full Time-Tagged Event data (TTEs). The TTE data from each DP5G unit will be accessed by a controller on the PIU and stored in a rolling buffer for access by the spacecraft during the data downlink. The PIU will also provide high voltage supplies for both the SiPMs and Si-PIN sensors on the GRD and XRD respectively along with the feedback controls for gain response versus detector temperature.
Simulation & Performance
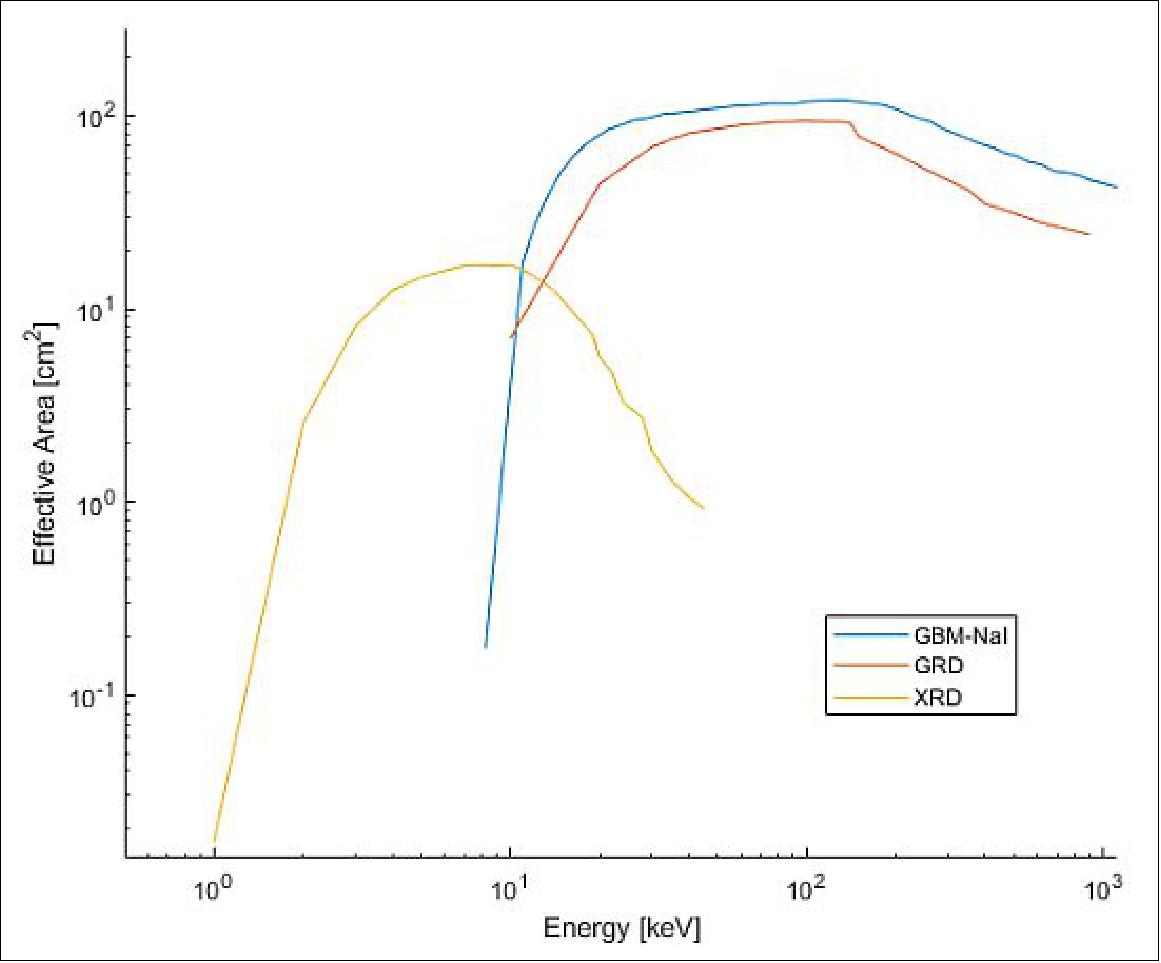
The initial designs of the XRD and GRD have been evaluated using the Geant4 particle simulation tool kit. This work was conducted by building detector response matrices simulated by Geant4 using the CAD geometry. The results for an on-axis beam of the detector effective area are shown in Figure 3.
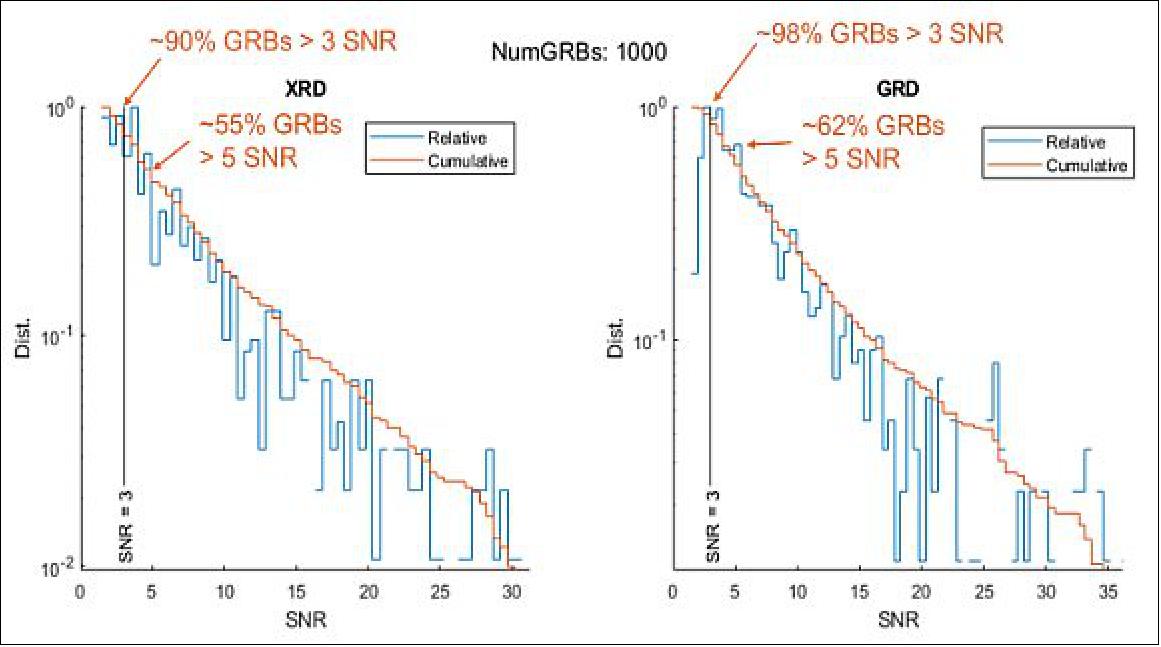
Simulations have been run using the Fermi-GBM catalog to determine the signal to noise ratio of the peak GRB emission that could be expected from a single on axis detection of ABEX in either the XRD or GRD. Results of this simulation are shown in Figure 4.
Payload Summary
The instrument suite for ABEX will provide an effective energy range of 2 keV to 1 MeV with an improvement in sensitivity over current gamma-ray missions in the ranges of 2-15 keV. The spacecraft is capable of mounting 6 XRDs and 5 GRDs across the external faces which in total provide a joint sky coverage of ~18%, with the GRDs seeing ~80% of the sky.
Development Status
• August 2021: The ABEX mission is both an educational and scientific endeavor that brings together universities across the state of Alabama. The science mission of ABEX is studying the prompt emission of GRBs by detection of low energy X-ray components and by the localization of sGRB and GW events through wavefront timing. To achieve these science goals, a super-synchronous orbit with perigee of 300 km and apogee of 60,000 km is needed. A small maneuvering thruster is required to raise its perigee from initial deployment to the science orbit along with providing station keeping during the mission life and deorbiting. The instrument suite of ABEX is comprised of 6 XRDs and 5 GRDs which will provide a wide-band energy coverage across a high field-of-view. The spacecraft is 12U in size using passive solar arrays and a standard setup of reaction wheels with magnetorquers that capitalize on the highly eccentric orbit passing through the magnetosphere. To mitigate radiation effects of the orbits VAB crossing a graded-Z shield will be used around the main avionics stack to protect the electronics for the OBC, SDR, PIU, and EPS. ABEX is designing for a mission life of 1 year science operation with an additional several months for maneuvering and decommissioning.
- So far ABEX has completed its first major milestone with its Mission Concept Review. The team is now working towards an internal System Requirement Review in the summer of 2021 and will be proposing to the Astrophysics Research and Analysis Program in the Fall of 2021.
Spacecraft
The initial ABEX concept study determined both the super-synchronous orbit and 12U CubeSat form factor as being ideal for science mission goals. The 12U volume provides sufficient surface area to include many instruments while still being accessible as a secondary payload under opportunities such as CSLI. The Tyvak 12U dispenser mass limit of 25 kg was also viable from an orbit maneuvering standpoint. To satisfy program educational goals, ABEX will be developing several in-house solutions to major satellite subsystems in its effort to expand both the workforce and facilities in the state of Alabama.
Structure & Configuration
The structural design of ABEX was built to accommodate the thruster, many surface mounted instruments, and three deployable arrays for large angle power collection ability without the use of a solar array drive assembly. The power collection strategy is currently being revaluated towards a smaller number of arrays and relying on stored power for burn maneuvers due to the mass and volume margins being insufficient at the current stage of the project.
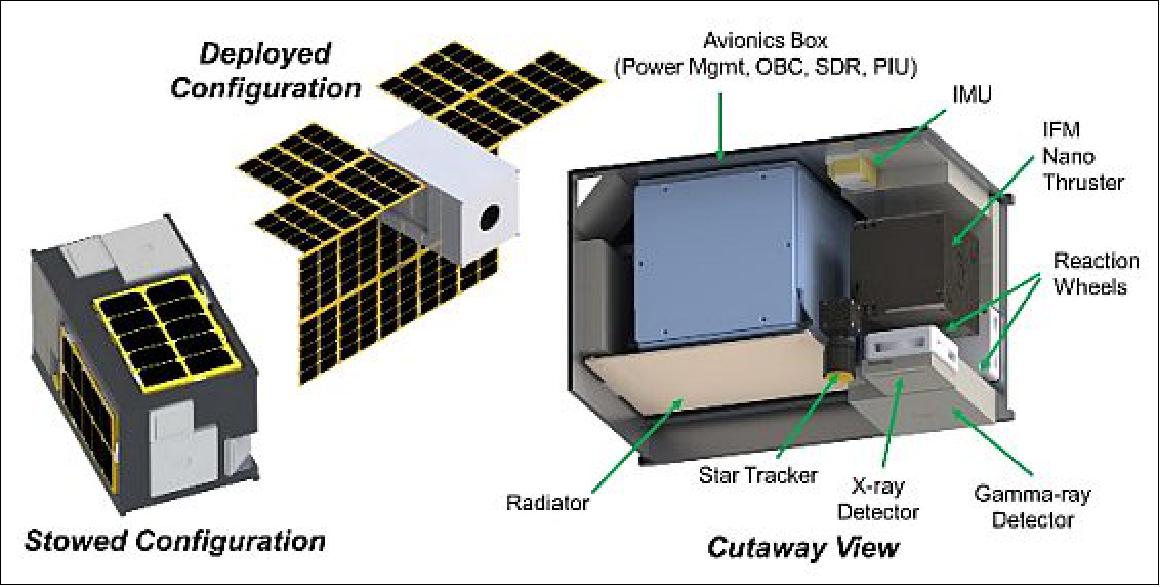
To mitigate radiation concerns, the main electronics will be housed within an avionics box with layers of radiation shielding material mounted on its faces. The specifics of the design are under development but will be a version of graded-Z shield being designed by the AU Thermal and Radiation team.
Propulsion
The initial concept study for ABEX traded spacecraft size, propulsion units, orbits, and instrument configurations. This resulted in the selection of a super-synchronous orbit deployment and the IFM Nano AR3 thruster from Enpulsion. The AR3 has Thrust Vector Control (TVC) as a redundancy measure for reaction wheel desaturation in two axes.
For the perigee-raising maneuver and perigee station keeping maneuvers, ABEX will operate the thruster along the orbit true anomalies within 20% of the apogee location, up to 10% on each side of apogee while above 52,000 km. For the apogee station keeping maneuvers, ABEX will operate the thruster below 1,600 km, which only represents 25 minutes of the 19.3-hour orbital period.
Electrical Power System
The ABEX Electrical Power System (EPS) team at UA is designing an in-house solution for the spacecraft power storage and management. ABEX will house a relatively large number of batteries, currently 16 Li-ion 18650s, and use those as the primary power source on the spacecraft during attitude maneuvers away from maximum solar charging angles. Many COTS options do not offer high battery storage capabilities without equally high numbers of Maximum Power Point Trackers (MPPT), which would be unnecessary for the ABEX power collection strategy of large passive arrays.
The two mission phases with the highest power draws are orbital maneuvering, and science operations. ABEX will enter a Sun-pointing safety state during VAB crossings between 1,600 km and 52,000 km. The updated solar array areas will be sized to fully charge the batteries during this time. A summary of power consumption and collection is shown in Table 7.
Maximum power draw | 65.5 W |
Peak power collection | 122 W |
Power storage | 160 W-hr |
Flight Software
The ABEX Flight Software (FSW) architecture is the open-source F’ (pronounced F prime) framework from JPL. F’ functions by importing XML specifications detailing spacecraft subsystem connectivity and using those to create C++ base classes and ground directories. Functionality such as telemetry encoding which is not defined in XML specifications can be included as C++after XML import. The XML defines what the structure is, and the C++ defines what the structure does. 7)
F’ is useful because of its compatibility with Model-Based Systems Engineering (MBSE) artifacts. ABEX is building an MBSE Integrated System Model (ISM) in Cameo Enterprise Architecture to define the spacecraft structure, model functionality, and requirements. If F’ connections, ports, and topologies are included in the ISM ontology, the ISM can be used to generate software frameworks at will. This means changes such as component down-selections can be included to the spacecraft configuration, and C++ code dictating functionality may only require minor changes such as pinout definitions. The learning curve and MBSE overhead to enact this versatile system is substantial, but once integrated this system allows the software to be firmly established within the system engineering process.
Telemetry, Tracking, & Command
The ABEX Telemetry, Tracking, & Command (TT&C) subsystem will use an X-band downlink with S-band uplink. The selection of these frequencies was for licensing accessibility and in closing the link with sufficient data rates. On the spacecraft two patch antennas will be used, one for each band. Both are being developed in-house by the USA team. The general design parameters such as frequency range, and gain characteristics of the patch antennae are still being determined. As part of the educational mission, the UA team will be developing a Software-Defined Radio (SDR) in-house. The modulation scheme is digital QPSK performed as a Configurable Logic Block (CLB) on the OBC’s Field Programmable Logic Array (FPGA). The SDR transmit signal proceeds to a digital to analog converter after the QPSK CLB and is subsequently filtered, mixed up to the carrier frequency, and amplified in various stages. The encoding scheme, handled entirely in software, is a concatenated external Reed Solomon (255,223) encoder and an internal convolutional (7,1/2) encoder with an interleaving depth of 5. In Table 8 the parameters of the SDR are shown. It is likely TX power will need to be increased to close the link at apogee.
Mass | 547 g (includes housing) |
Power | ~3 W TX, ~2.8 W RX, ~7.8 W Duplex |
Volume | ~175.1 cm3 |
Frequency range | X-band 8,270 – 8,330 MHz, S-band TBD |
Command & Data Handling
In addition to the SDR, the UA team will also be building an in-house OBC and interface board comprising the backbone of the Command & Data Handling (C&DH) system. The central OBC architecture is based on a Xilinx System-on-Chip (SoC) FPGA with a relatively high sample input and output rate to interface cohesively with the SDR intermediate frequencies. The parameters of the in-house OBC are shown in Table 9.
Mass | 129 g |
Power | 3.48 W |
Volume | ~35.4 cm3 |
Processing power | 9 DMIPS/MHz (peak, 4 Cortex A53) |
The SDR, OBC, interface board, and science boards will be integrated into a single board stack and mounted inside the avionics box for radiation protection.
Guidance, Navigation, & Control
The highly eccentric orbit of ABEX makes the Guidance, Navigation, and Control (GN&C) system a hybrid approach between a typical LEO mission and a deep space mission. ABEX features a star tracker for primary attitude determination with magnetometers and sun sensors for redundancy. For attitude control, ABEX has three-axis reaction wheels, magnetorquers, and the AR3 thruster with back-up two-axis TVC. At low orbital altitudes the magnetic field strength is sufficient to utilize magnetorquers for both primary control authority and reaction wheel desaturation. Above ~1,500 km altitude, the magnetic models tend to be become less reliable, and magnetorquers could not be used for reliable control authority. Thus, reaction wheels are the baseline three axis control authority mechanism at all altitudes and the only three-axis control authority mechanism at high altitudes. Reaction wheel desaturation is only planned for perigee operations under 1,500 km when no apogee station keeping thrust maneuver is required; apogee station keeping thrust maneuvers would be accomplished via magnetorquers near perigee in this instance. In Table 10 and 11 full breakdowns of the attitude and navigation systems are described.
Component | Description | Function |
Sun sensors | 6 units mounted on external faces of the spacecraft | Backup attitude knowledge for sun sensing |
Star tracker | Single unit with baffle | Primary attitude determination |
GPS | Single unit mounted in the OBC with patch antenna | Position, velocity, time state vector determination |
Magnetometers | Several sensors mounted across the spacecraft | Used for magnetorquer input and secondary backup |
IMU | Single unit | Rate knowledge for attitude control |
Component | Description | Function |
Reaction wheels | Three wheels aligned along principal axes | Main control authority |
Magnetometers | Three rods along principal axes | Detumble arresting and desaturation during perigee crossing |
Propulsion (Thrust | Orbital maneuvering and 2-axis TVC | Desaturation and attitude control backup with either |
Timing, position, and velocity updates will be obtained via GPS when the satellite is below ~20,000 km altitude, and state vectors will be propagated when GPS updates are not available. In the event GPS receivers fail on-orbit, non-coherent ranging and Doppler can be used to obtain state vectors. It is possible a Chip-Scale Atomic Clock (CSAC) will be needed to facilitate this redundancy measure or separately to ensure GPS signal accuracy if a low number of GPS satellites are visible.
Spacecraft Summary
The ABEX spacecraft is a 12U propulsive spacecraft with several in-house systems being developed by universities within the state of Alabama. The external faces of the spacecraft house a suite of XRD and GRD instruments for the science mission. The power collection strategy uses passive deployed solar arrays and large battery storage. To handle the unique radiation environment from the VAB (Van Allen Belt) passage, radiation shielding will be mounted to an avionics box which houses the main spacecraft electronics. The GNC approach uses standard reaction wheels with magnetorquers but are only applicable for low altitude regions when the magnetic field strength is sufficient. Attitude determination uses a star tracker as primary and sun sensors as backup with an IMU. Navigation uses a GPS with numerical state propagation with backup from Doppler ranging. To achieve its science orbit ABEX uses a small electric thruster, which also provides a redundant two-axis thrust vector control. As part of its educational mission, the SDR, OBC, EPS, and instrument systems are being developed in-house by the partnering universities.
Launch
Launch options are under study. ABEX will be applying to launch opportunities and astrophysics funding solicitations in the Fall of 2021. A launch is expected in 2024. 8)
Orbit
ABEX orbits Earth in a sun-synchronous orbit and establishes its ability to collect science data. It will take a few conversations between ABEX and the Near Space Network (NSN) to determine the appropriate calibration metrics for the ABEX X-ray and Gamma-ray detectors.
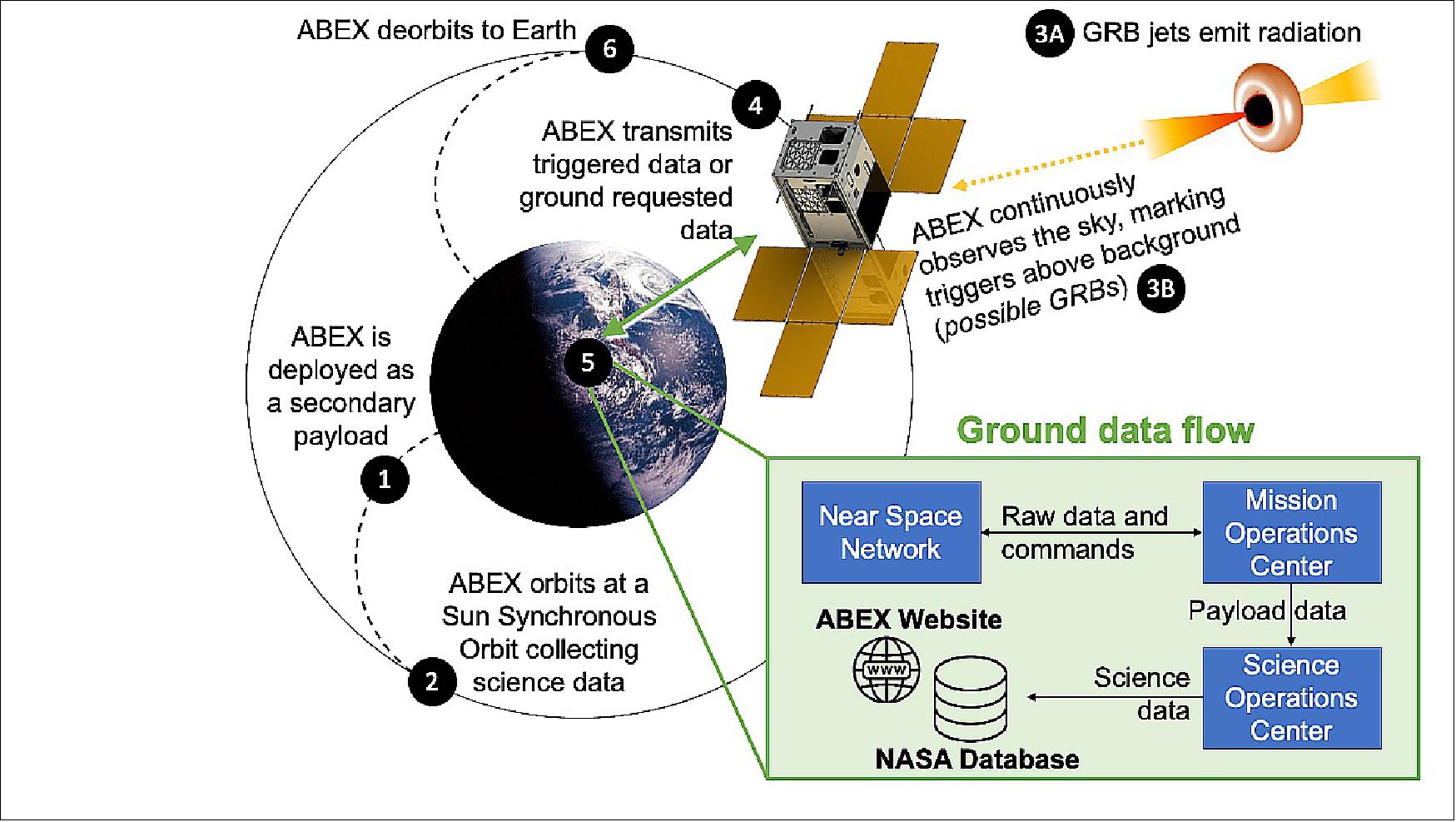
Mission Operations Overview
The ABEX Mission has four Phases: (1) Launch & Early Operations (LEOP), (2) Science Commissioning, (3) Science Operations, (4) Spacecraft Decommissioning.
1) LEOP: The spacecraft is launched, ejected, and powered on for the first time in space. After charging its batteries, ABEX communicates with Earth for the first time, reporting the status of its deployment procedures. The spacecraft will cycle between a sun-pointing Idle mode and Earth-pointing Communications modes with Safety and Reaction Wheel Desaturation modes occurring as needed until the MOC (Mission Operations Center) commands the spacecraft to proceed to Phase 2: Science Commissioning.
2) Science Commissioning: The MOC needs to know what the background radiation environment looks like through the X-ray and Gamma-ray detectors so the spacecraft can distinguish between background radiation and GRBs. The Spacecraft will take measurements of the background radiation environment at various orbital locations and communicate those to the MOC; the South Atlantic Anomaly and Van Allen Belts' High-Latitude Zones are radiation-intense areas that will affect the spacecraft's ability to distinguish between background radiation and GRBs. After a few weeks of cycling between Science mode and Communications mode with Safety and Reaction Wheel Desaturation modes occurring as needed, ABEX should be ready to detect the energy signature of GRBs.
3) Science Operations: Software modes for Phase 2: Science Commissioning are the same as Phase 3: Science Operations, only the instruments are more careful about which data sets are downlinked. ABEX will stay in Phase 3: Science Operations until the mission is deemed complete.
4) Spacecraft Decommissioning: After uplinking a final command to power down the spacecraft, the Mission Operations Center will play Closing Time by Semisonic loudly through the facility speaker system.
Ground Station
The ground station for ABEX will use a commercial provider since the science mission requires transmission near the apogee (occurring right before reentering the VABs) the communication link must close for distances upwards of 40-50 k km from Earth. KSAT (Kongsberg Satellite Services AS) and the Near-Earth Network (NEN) have been evaluated using STK (Satellite Tool Kit), as feasible candidates with the NEN offering the best option for the mission.
In addition to the ground station several ground support systems will be needed for this mission. The science team will have an active monitoring system to search for GRB and GW events in the GW and GRB detection networks which occur during the observation arcs of the mission and construct regions of interest for event data requests from the spacecraft data buffer.
References
1) Jared Fuchs, Michael Halvorson, Victor Lopez, ”An Overview of the Alabama Burst Energetics eXplorer (ABEX) Mission,” Proceedings of the 35th Annual AIAA/USU Virtual Conference on Small Satellites, August 7-12, 2021, Logan, UT, USA, paper: SSC21-WKII-04, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=5113&context=smallsat
2) https://web.archive.org/web/20230127012021/https://www.abexmission.org/
3) B. P. Abbott, R. Abbott, T. D. Abbott, F. Acernese, K. Ackley, C. Adams, et al., ”Gravitational Waves and Gamma-Rays from a Binary Neutron Star Merger: GW170817 and GRB 170817A,” The Astrophysical Journal Letters, Volume 848, Number 2, Published: 16 October 2017, https://doi.org/10.3847/2041-8213/aa920c
4) A. M. Beloborodov, P. Mészáros, ”Photospheric Emission of Gamma-Ray Bursts,” Space Science Reviews, Volume 207, pp: 87-110, Published: 28 March 2017, https://link.springer.com/article/10.1007%2Fs11214-017-0348-6
5) R. Hascoët, F. Daigne, R. Mochkovitch, “Prompt thermal emission in gamma-ray bursts,” Astronomy & Astrophysics, Vol. 551, Published: 5 March 2013, https://doi.org/10.1051/0004-6361/201220023
6) Michael W. Coughlin, ”Lessons from counterpart searches in LIGO and Virgo’s third observing campaign,” Nature Astronomy, Volume 4, pp: 550-552, Published: 12 June 2020, https://doi.org/10.1038/s41550-020-1130-3, URL: https://www.nature.com/articles/s41550-020-1130-3.pdf
7) Michael Halvorson, CJ Short, Austin Bush, Brandon Scruggs, Joshua Lazenby, Sarah Kilgore, Sam Spearman, William Garrison, Paul Poe, ”Model-Based Systems Engineering and F’: Proof of Concept Via the Creation of an OnOrbit Textual Command Parsing Component for the ABEX Mission,” Proceedings of the 35th Annual AIAA/USU Virtual Conference on Small Satellites, August 7-12, 2021, Logan, UT, USA, paper: SSC21-WKV-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=5131&context=smallsat
8) ”ABEX (Alabama Burst Energetics eXplorer),” Nanosats Database, 19 August 2021, URL: https://www.nanosats.eu/sat/abex
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Payload Design Development Status Spacecraft Launch Ground Station References Back to top