Aalto-1: The Finnish Student Nanosatellite
EO
Operational (extended)
Other
University of Aalto
Aalto-1 is a nanosatellite project developed by students of Aalto University, Finland in partnership with VTT Technical Research Centre of Finland, University of Helsinki, University of Turku and the Finnish Meteorological Institute. Launched in June 2017, Aalto-1 is the first Finnish Earth observation nanosatellite, and demonstrates the use of compact instruments that are applicable in similar nanosatellites.
Quick facts
Overview
| Mission type | EO |
| Agency | University of Aalto |
| Mission status | Operational (extended) |
| Launch date | 23 Jun 2017 |
| Instruments | RadMon, AaSI |
| Instrument type | Other |
| CEOS EO Handbook | See Aalto-1: The Finnish Student Nanosatellite summary |
Summary
Mission Capabilities
The Aalto-1 mission carries two instruments, AaSI (Aalto-1 Spectral Imager) and RadMon (Radiation Monitor). The AaSI module is a Fabry-Pérot Interferometer (FPI), that operates in the visible spectral range and can capture spatial imagery in one to three bands at once. It aims to demonstrate the feasibility and applications of compact interferometers and similar instruments aboard smaller satellite models. The RadMon sensor is a miniature particle telescope, jointly developed by the universities of Helsinki and Turku to enable and assist studies of solar wind conditions in orbit.
Performance Specifications
The AaSI instrument has a spectral range of 500-900 nm, with spectral resolution ranging from 10-30 nm. It is capable of imaging in 6 to 20 channels, with 60 possible channels, and has a ground pixel size of 240 m x 240 m, with a FOV (Field of View) of 10° x 10°. The RadMon module covers particle energy ranges of 10-200 MeV for protons, and 0.7-10 MeV for electrons, with measurements consisting of particle counting rates in several passbands within these energy ranges. The Aalto-1 mission operates in a sun-synchronous near-circular orbit, at an altitude of 505 km and inclination of 97.44° with the LTDN (Local Time on Descending Node) at 0930 hours.
Space and Hardware Components
The Aalto-1 nanosatellite bus is based on existing 3U CubeSat designs, with dimensions 0.34 m x 0.10 m x 0.10 m. The bus has a launch mass of approximately 4 kg and average power production of 4.8 W. The satellite has outlasted its design life of two years. Aalto-1 utilises the IADCS-100 (Integrated Altitude Determination and Control Subsystem), jointly developed by BST (Berlin Space Technologies) and Hyperion Technologies. This ADCS (Altitude Determination and Control Subsystem) module contains three reaction wheels, a star tracker and magnetorquers, and is one of the smallest functioning ADCS units. The mission is also equipped with an EPB (Electrostatic Plasma Brake), an electric solar wind sail designed to de-orbit the satellite after the completion of its mission. The EPB is a 100 m long, 25-50 µm wide tether that experiences a Coulomb drag force as it moves with respect to the ionosphere. Its aim in the Aalto-1 mission is to demonstrate deployment of a multiline tether in de-orbiting a craft and to measure the electrostatic force exerted on the craft by the ionosphere.
Aalto-1: The Finnish Student Nanosatellite
Spacecraft Launch Mission Status Sensor Complement Mission Phases References
Overview
Aalto University of Aalto, Finland has launched a student nanosatellite project called Aalto-1. The satellite is being built mainly by students in project assignments and thesis work. The satellite project is coordinated by the Department of Radio Science and Engineering and supported by Space Technology teaching. 1) 2) 3) 4) 5) 6) 7) 8)
Project cooperation is also provided by various Departments of Aalto University: Department of Automation and Systems Technology, Department of Communications and Networking, Department of Applied Mechanics; and in addition the Department of Physics of the University of Helsinki (HY), Department of Physics and Astronomy of University of Turku (UTU), VTT (Technical Research Center of Finland, Helsinki), FMI (Finnish Meteorological Institute), Aboa Space Research Oy, Oxford Instruments Analytical Oy and other Finnish companies.
The core consortium is comprised of: 9) 10)
- Aalto University (satellite bus, ground segment, project PI)
- VTT Technical Research Centre of Finland (Spectrometer payload)
- University of Helsinki (RadMon payload)
- University of Turku (RadMon payload)
- Finnish Meteorological Institute (Electrostatic Plasma Brake payload).
A feasibility study and the preliminary design of the satellite have been made by Aalto University students during the spring semester 2010. The nanosatellite is based on the 3U CubeSat standards. The overall objective is to demonstrate the feasibility of a MEMS Fabry-Perot spectrometer for space applications.
The Aalto-1 mission goals are: 11)
• To design, build and operate first Finnish Earth Observation (EO) nanosatellite
• Technology demonstration of a very small imaging spectrometer for spaceborne EO
• Technology demonstration of a very small radiation detector for future satellites
• Development and demonstration of a deorbiting device for nanosatellites based on e-sail concept and measurement of its performance
• Promotion of engineering education in Finland with the aid of a satellite project.
(image credit: Aalto University)
Spacecraft
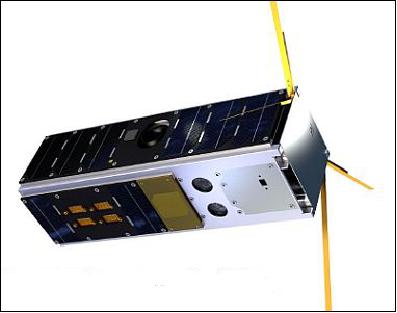
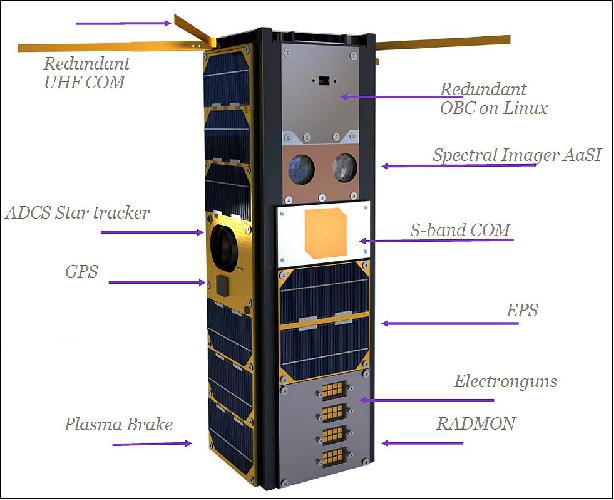
The nanosatellite is based on a 3U CubeSat form factor with a size of 34 cm x 10 cm x 10 cm and a mass of ~ 4 kg. Depending on the final orbit, it will have an average power production of 4.8 W. The design life is 2 years.
The mechanical structure of the satellite consists of two subsystem PCB fastener stacks, which are joined by specially designed stack plates, and the main outer frame. The outer frame itself consists of two separate aluminum parts, both 1.5 mm thick, fastened together into one tubelike structure.
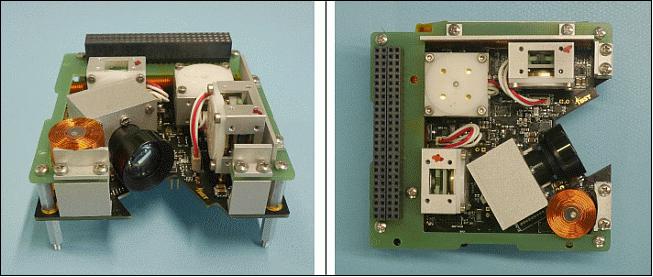
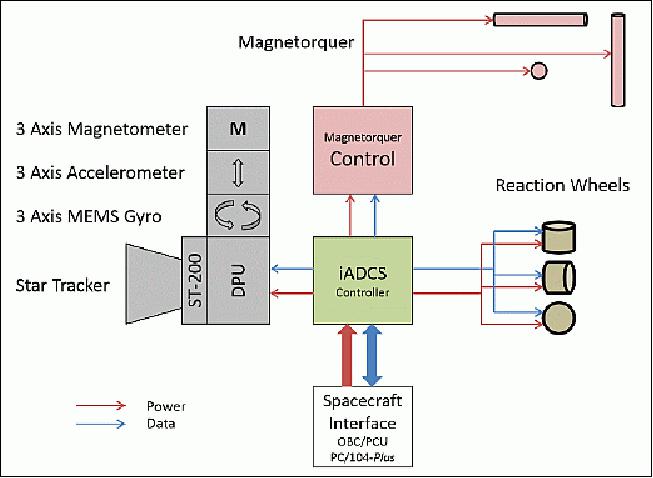
ADCS (Attitude Determination and Control Subsystem): The Aalto-1 project selected the iADCS -100 (integrated ADCS-100) system, designed and built in a partnership between BST (Berlin Space Technologies) GmbH, Berlin-Adlershof, Germany and Hyperion Technologies B.V. of Delft, The Netherlands. iADCS-100 is an autonomous attitude control system for CubeSats. It contains a star tracker, 3 reaction wheels and magnetorquers, a full set of MEMS sensors and sophisticated ADCS algorithms in a package of 95 x 90 x 32 mm in size and 350 g in mass. Aalto-1 serves as the first reference mission for iADCS. The iADCS-100, shown in Figure 2, is one of world's smallest full-functional attitude control systems. 12) 13)
In this partnership, BST is responsible for the management and system design of iADCS, attitude control and algorithms, mechanics and structure as well as assembly integration and test. Hyperion is responsible for the electronics design and miniaturization. Furthermore Hyperion produces the wheels and the magnetorquers used in the iADCS.
Additional sensors such as fine sun sensors or a GPS receiver can be installed via I2C bus. Table 1 shows the specification of iADCS.
Parameter | Value | Comment |
Size, mass | 95 x 90 x 32 mm, 350 g | CubeSat compliant |
Power consumption | 0.5W / 1.8 W | Nominal / peak |
Interface | RS485, I2C | Via CubeSat pin-compatible PC104 connector |
Attitude knowledge | 30 arcsec | Star tracker (ST-200 model) |
Pointing accuracy | <<1º | Limited by host satellite alignment |
Slew rate | > 1.5º/s | For a 3U CubeSat in all axes using reaction wheels |
Attitude modes | Safe-mode / De-tumbling | De-tumbling and diagnosis |
Actuators | 3 reaction wheels (RW200) | Torque: 0.087 mNm, angular momentum: 1.5 mNms |
Sensors | Star Tracker |
|
Additional external sensors via I2C bus | Fine sun sensors |
|
Options for larger satellites | Additional star tracker | And custom baffles |
The Aalto-1 mission requirements call for all the attitude modes that iADCS is providing. In addition, the following functional parameters are needed by Aalto-1: ADCS knowledge: <1º, ADCS pointing accuracy: <1º, rotation measurement: >200º/s, slew rate (wheels): >1.5º/s, acceleration (wheels): >0.01º/s2, lifetime: 2 years, qualification: full.
On the electronics side Aalto provides the sun sensors and the GPS receiver that are attached to iADCS as auxiliary sensors via I2C bus. Furthermore Aalto gives scientific support in implementing the highly demanding spin mode of Aalto-1.
Upgraded versions of iADCS will be compliant with small operational microsatellites in the 10-20 kg class. For these types of applications, BST foresees to attach a second star tracker and larger wheels and magnetorquers in the future. Suitable wheels that BST can integrate to this larger version of iADCS are under development by Hyperion. Alternatively, if no suitable wheels are available, integration of third party wheels is possible.
OBC (On-Board Computer): The OBC design is based on an ARM 9 processor (AT91RM9200) utilizing an external RAM. This computer is equipped with EEPROM, DataFlash, NAND Flash, and microSD for data storage. The OBC is designed to run a customized GNU/Linux operating system and uses several strategies to increase the system reliability. The OBC features a dual boot memory, an external I2C bus controller and LVDS transceivers, it utilizes two 32 MB SDRAM modules. 14) 15)
EPS (Electrical Power Subsystem): The satellite is covered with solar cells on almost all available surfaces, forming three long-side solar panels, and one smaller on the nadir side (during the remote-sensing phase of the mission). The EPS system consists of battery pack and a Control Board, which was manufactured according to Aalto-1 requirements. The solar panels of the satellite were manufactured at Aalto University. The satellite has two 10 W solar panels, one 7.5 W solar panel and one 2.5 W solar panel . The panels use Azur Space triple junction high efficiency solar cells which are glued on a PCB substrate. The panel substrate was designed to provide high thermal conductivity. Weight of one full size solar panel is 170 g.
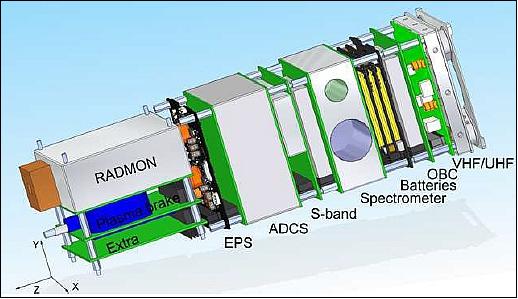
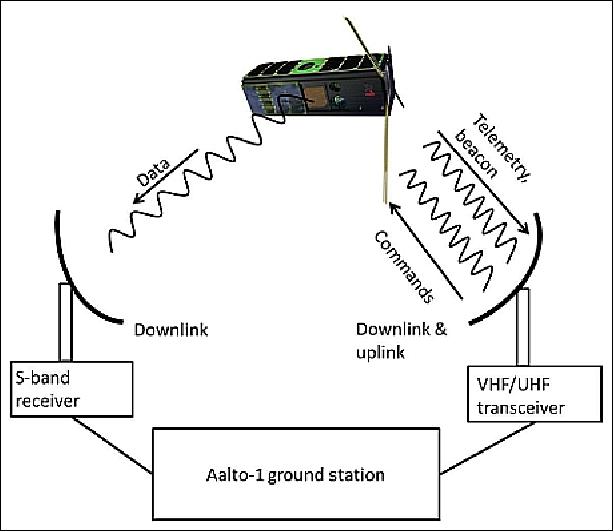
RF communications: The TT&C data are transmitted in VHF/UHF. The COM (Communications system) consists of VHF/UHF transceiver providing the command link between the satellite and ground station. It provides also the radio beacon signal. An ADS (Antenna Deployment System) deploys the VHF/UHF antennas when the satellite is released from the launch vehicle.
The payload data are downlinked in S-band in the frequency range of 2.402 GHz. The S-band system of Aalto-1 is illustrated in Figure 7. The satellite segment consists of interface towards the OBC, S-band transmitter circuit and S-band patch antenna. Between the satellite and the ground station is the radio wave propagation medium that is an important factor in the design of radio links. The ground segment consists of ground station equipment, such as the receiving antenna, the antenna rotating and control system, low noise amplifier located after the antenna, the receiver and the whole ground station control software. 16)
The selected architecture for the Aalto-1 S-band transmitter consists of the Texas Instruments TI CC2500 transceiver. The device provides a data rate of 1 Mbit/s, the RF output power is up to + 33 dBm, the power consumption is 4.2 W (max) and the data throughput/station pass is ~41.6 MB.

Launch
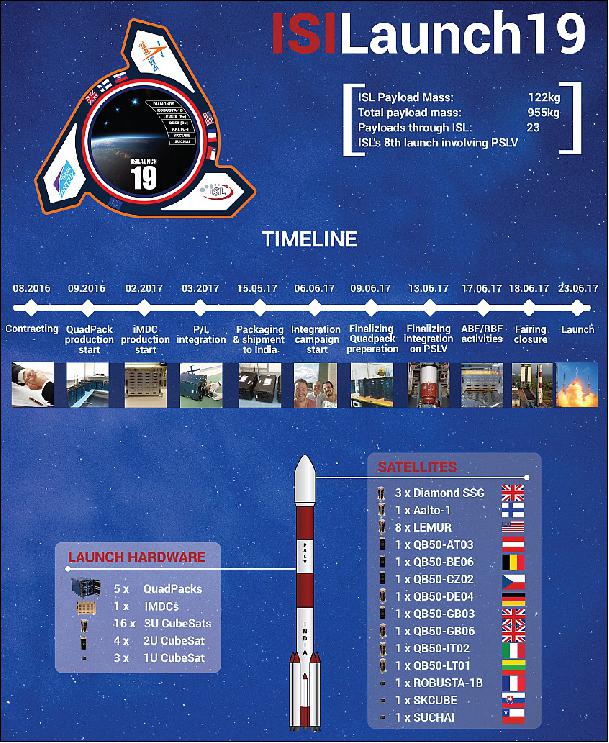
The Aalto-1 nanosatellite was launched on June 23, 2017 (03:59 UTC) as a secondary payload on the PSLV-C38 vehicle in XL configuration of ISRO from SDSC (Satish Dhawan Space Center), India. The primary payload on this flight was CartoSat-2E (~712 kg), the sixth satellite in the Cartosat-2 series (total launch mass of ~955 kg). 17) 18) 19) 20)
Aalto-1 was originally scheduled to be launched in 2013, though it was delayed to autumn 2015, later to May 2016 and finally to the end of 2016. In April 2015, Aalto University signed a contract for the launch of the Aalto-1 satellite with ISIS (Innovative Solutions In Space, BV) of Delft, The Netherlands, which brokers launch opportunities for SpaceX flights. 21)
Note: The Aalto-1 was supposed to be launched from the United States (VAFB) with SpaceX's Falcon 9 launch in 2015, but due to the two incidents that hit it, rocket flights are far behind schedule and, like many customers, the Finnish satellite has been waiting for a long time.
Orbit: Sun-synchronous near-circular orbit, altitude of 505 km, inclination = 97.44º, LTDN (Local Time on Descending Node) at 9:30 hours.
Secondary Payloads
30 Satellites (co-passengers) with a total mass of 243 kg)
The 29 international customer nanosatellites were launched as part of the commercial arrangements between Antrix (Antrix Corporation Limited), a Government of India company under DOS (Department of Space) and the commercial arm of ISRO and the International customers.
The Dutch company ISISpace (Innovative Solutions In Space) of Delft accommodated most of the secondary payloads aboard the multi-satellite launch (responsible for manifesting a total of 23 satellites on this particular launch). Engineers stowed the CubeSats in QuadPacks before shipping them to the Indian launch site. 22)
Among these 23 satellites, there are 8 CubeSats that will complement and complete the QB50 constellation for upper atmospheric research (www.qb50.eu). This project, sponsored by the European Commision's FP7 is managed by the Von Karman Institute from Belgium and ISISpace has been one of the consortium partners of QB50 since the start. The CubeSats launched by ISISpace into polar orbit will work together with the CubeSats deployed from the International Space Station in May.
The ISILaunch19 manifest also includes several payloads that were initially scheduled for a launch on a Falcon 9 mission through Spaceflight's Sherpa mission, a launch that was significantly delayed due to various factors. ISL and Spaceflight have jointly worked on re-manifesting these payloads to this PSLV launch to make sure our customer's satellites were launched earlier. Such a re-manifesting of payloads clearly shows the added value of the ISILaunch Services of ISISpace to serve the CubeSat community, offering access-to-space flexibility towards customers of launch services by operating across multiple launch vehicles and missions in parallel.
• NIUSAT (Noorul Islam University Satellite), located in Kumarakovil, Thuckalay, Kanyakumari District Tamil Nadu, India. NIUSAT is an Earth observation nanosatellite (15 kg). NIUSAT features a RGP camera with a ground resolution of 25 m and a frame size of 50 km x 50 km.
• CE-SAT-1 (Canon Electric Satellite-1), a microsatellite (50 kg) of Canon Electronics Space Technology Laboratory, Japan. The microsatellite features an optical imaging system based on a 40 cm diameter Cassegrain telescope.
• Max Valier, a nanosatellite (16 kg) of the "Max Valier" school Bolzano and the "Oskar von Miller" school Merano, in South Tyrol, Italy.
• D-SAT (Deorbit Satellite), a 3U CubeSat mission (3.5 kg) by the Italian company D-Orbit to demonstrate active end-of-life reentry.
• 3 Diamond nanosatellites (Blue, Green, Red) of Sky and Space Global, UK, developed by GomSpace ApS of Denmark. The three 3U CubeSats (each 6 kg) are pathfinders for Sky and Space Global's 200 Satellite LEO constellation.
• Pegasus, a nanosatellite (2U CubeSat) of FH Wiener Neustadt, Austria (thermosphere research). Pegasus is a member of the QB50 constellation with the m-NLP payload.
• InflateSail, a 3U CubeSat of SSC (Surrey Space Centre) at the University of Surrey, UK (technology demonstration nanosatellite). Part of the QB50 constellation. Inflatesail is designed to test a deployable sail as a means to deorbit the satellite. Inflatesail will use a 3.3 m sail at the end of a 1m boom deployed from the body of the satellite.
• UCLSat (University College London Satellite), a 2U CubeSat of UCL with the INMS (Ion and Neutral Mass Spectrometer), ionosphere research. UCLSat is part of the QB50 constellation.
• NUDTSat (National University of Defense Technology Satellite), Belgium, a 2U CubeSat of NUDT for ionosphere research. NUDTSat features a FIPEX instrument of the QB50 constellation.
• COMPASS-2 (DragSail CubeSat), a 3U CubeSat of FH Aachen, Germany (technology demonstration nanosatellite). COMPASS-2 is part of the QB50 constellation.
• LituanicaSAT-2, a 3U CubeSat of Vilnius University, Lithuania. The CubeSat is part of the QB50 constellation with a FIPEX payload.
• URSA MAIOR (University of Rome la SApienza MicroAttitude In ORbit testing), a 3U CubeSat to study the lower thermosphere. USRA MAIOR is a member of the QB50 constellation with the m-NLP payload.
• VZLUSat-1, a 2U CubeSat Czech technology nanosatellite of VTLU, developed in cooperation with Czech companies (RITE, HVP Plasma, 5M, TTS, IST) and universities (CVUT, University of West Bohemia). The nanosatellite carries on board the following experiments: a miniaturized X-ray telescope, composite material for radiation shielding, FIPEX, a QB50 instrument, to measure the concentration of oxygen in the thermosphere.
• SUCHAI-1 (Satellite of the University of Chile for Aerospace Investigation), a 1U CubeSat (1 kg).
• Venta-1, a nanosatellite (~5 kg) of Ventspils University, Latvia, developed by Ventspils University College in cooperation with Ventspils High Technology Park, Bremen University of Applied Sciences and OHB Systems. Venta-1 carries an AIS (Automated Identification System ) receiver, which will pick up identification signals from ships at sea.
• Aalto-1, a Finnish student nanosatellite (3U CubeSat) of Aalto University, Aalto, Finland.
• ROBUSTA-1B (Radiation on Bipolar Test for University Satellite Application), a nanosatellite with a scientific experiment developed by the University of Montpellier students (France), a successor to the ROBUSTA satellite, which was launched in February 2012.
• skCube, a 1U CubeSat for educational and popularization outreach developed by SOSA (Slovak Organization for Space Activities ) at the University of Zilina. It is Slovakia's first satellite.
• CICERO-6 (Community Initiative for Cellular Earth Remote Observation-6), a 6U CubeSat of GeoOptics Inc. (~10 kg), Pasadena, CA, built by Tyvak Nanosatellite Systems. The objective is to demonstrate radio occultation observations for a commercial customer. CICERO-6 features Cion (CICERO Instrument for GPS-RO) with a mass of 1.2 kg. Cion has a size of 30 x 10 x 6 cm, power of 8 W. 23)
• Tyvak-53b, a technology 3U demonstrator by Tyvak Nanosatellite Systems, Inc. (Irvine, CA) to validate technology aimed at helping to deorbit small satellites.
• Lemur-2 x 8. Lemur-2 is commercial satellite constellation of Spire Global Inc., San Francisco, CA, The objective of the Lemur-2 constellation is ship tracking via AIS (Automatic Identification System) with SENSE. The STRATOS instrument makes use of GPS occultation measurements to determine temperature, pressure and humidity profiles of Earth's atmosphere for application in operational meteorology.
All 31 Satellites separated successfully. 24)
Mission Status
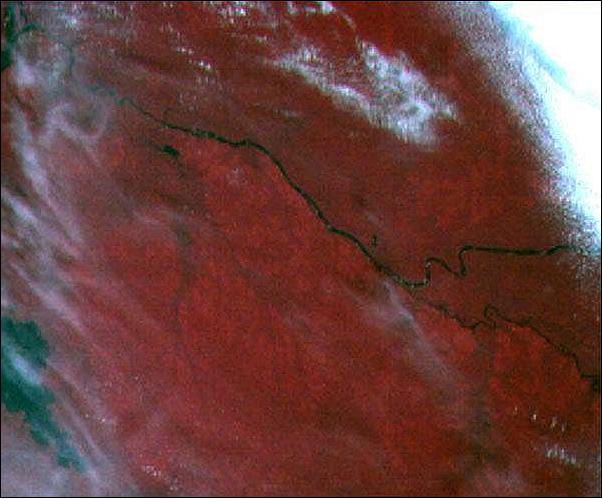
• October 2, 2018: VTT's hyperspectral imager continues to observe the earth on board the Aalto-1 nanosatellite. For hyperspectral imagers it is unique to reach such a small size and weight, and also to prove a capability to survive in harsh space conditions on-board a small satellite. It has even survived a grade X solar storm while still continuing to supply high-quality data. 25) The hyperspectral camera on Aalto-1 operates in a wavelength range of 500-900 nm and is half a CubeSat unit (0.5U) in size, or 5 cm x 10 cm x 10 cm. This camera has made it possible to program the operation wavelengths from Earth, which makes it easier to scale the same camera hardware to enable different applications.
- Since small satellites are more cost-efficient to launch, it is possible to form constellations of multiple smallsat instruments, which can provide global observation data with better real-time coverage than traditional satellites. This makes it possible to use space technology in the creation of novel service concepts on Earth based on data and AI, expanding to completely new markets such as insurance and agriculture. VTT's next new instrument waiting to be launched to space soon is the world's first CubeSat near- and short-wave infrared (NIR/SWIR) hyperspectral imager. VTT's hyperspectral imaging technologies have been developed for a wide variety of wavelengths as well as applications.
• June 21, 2018: Aalto-1 cleared the initial difficulties it faced once in orbit. The largest amount of research data has been provided by the RADMON radiation monitor carried by the satellite. 26) Over the year, the Otaniemi ground station underwent major improvements. The student team updated the software, improved the control of the antennas and developed remote use of the station. In the future, the students are set to make the ground station operations fully Software Defined Radio-based, which will also enable its flexible use in future space missions.
• July 23, 2017: The satellite was deployed to a 486 x 518 km, sun synchronous, inclination 94.45° orbit at 04:22 UTC. The first beacon of the satellite was received in Africa and shortly also from the satellite Ground Station in Finland. Satellite telemetry was collected and the electrical power system was commissioned in the first place. The UHF link was optimised as the background noise was observed to be stronger than expected. 27)
- Most of the satellite subsystems were commissioned during the first three weeks of the mission and the satellite had already provided the first demonstration of the two payloads, namely the spectral camera AaSI and radiation monitor RADMON. The satellite was kept in tumbling mode during the three first weeks. Most of the satellite subsystems operate as designed and no major flaws in functionality were observed during the first three months of the mission.
• July 24, 2017: The first image was taken with the VTT Technical Research Center of Finland developed hyperspectral camera's secondary camera. 28)

Sensor Complement
Aalto-1 is equipped with several scientific instruments. The miniature imaging spectrometer is the main payload of the satellite. It is intended primarily as a technology demonstration and, if operating successfully, will be used for actual scientific remote-sensing purposes.
AaSI (Aalto-1 Spectral Imager)
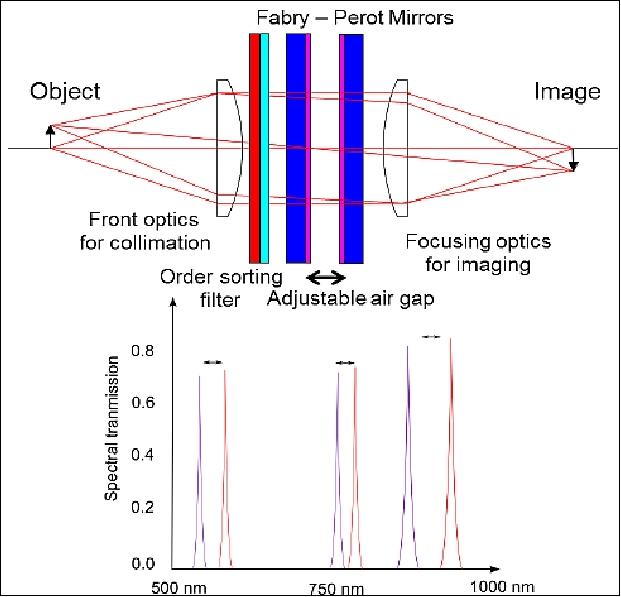
The AaSI instrument is under development at VTT Technical Research Center of Finland. The spectrometer is based on a tunable FPI (Fabry-Pérot Interferometer), a piezo-actuated MEMS device. The staring AaSI instrument is able to record 2D spatial images at one to three selected wavelength bands simultaneously. The interferometer consists of just two highly reflecting surfaces separated by a tunable air gap. To measure more than one channel at once, the multiple orders of the spectrometer's transmission function can be matched to the sensitivities of the normal CCD/CMOS image sensor channels, such as red, green and blue pixels of a Bayer pattern RGB sensor or the different CCD's of a 3 CCD detector system. 29) 30) 31) 32)
AaSI is controlled in a closed capacitive feedback loop by three different piezo actuators. With these actuators the air gap can be adjusted from ~0.5-3 µm, with a spectral range from 500 -900 nm (using an RGB detector). Filter apertures of 7 or even 19 mm can be reached with the piezo-actuated FPI (Fabry-Pérot Interferometer). This design has already flown on UAVs (Unmanned Aerial Vehicles); it worked well, reaching a spectral resolution of 7-10 nm.
The MEMS version is based on a different concept, where the interferometer is a completely monolithic structure which has no discrete actuators: the second mirror is bent by an electrostatic force; thereby the air gap is adjusted. This design has not flown yet, but a design with a similar basic technology has been used in Vaisala's CARBOCAP® sensor since 1997. Currently apertures of 0.5 - 2 mm with a wavelength range of 435 - 570 nm can be reached with the MEMS technology, but numbers are improving constantly and the spectral resolution is already equal to that of the piezo-actuated version.
The MEMS technology is based on the use of dielectric Bragg mirrors, which provide excellent optical throughput but have a limited spectral operational range, typically ±1 % about the center wavelength. So far, VTT has used metallic mirrors in the PFPI (Piezo-actuated Fabry-Pérot Interferometer), which provide a wide spectral range of 400-1000 nm but an optical transmission of only 25 to 35 %, thus reducing the optical throughput. However, Bragg mirrors can also be used in piezo-actuated devices which makes the optical throughput of the two technologies equal.
Parameter | Value | Comment |
Spectral range | 500 - 900 nm | VIS range |
Spectral resolution | 10-30 nm | @FWHM, spectral step 1 nm |
Ground pixel size | ~240 m x 240 m | @ 700 km orbital altitude |
Spectral channels | 6 to 20 | 60+ channels possible |
FOV (Field of View) | 10º x 10º | 120 km swath width @ 700 km |
SNR @ 3 ms&20 nm @FWHM | > 50 | SNR requirement is defined for June and latitude of Helsinki (60) and for albedo 30%. |
Power usage | < 4 W | Peak power |
Instrument mass, size | 600 g, 9.7 cm x 9.7 cm x 4.8 cm |
|
Detector | CMOS sensor with 2048 x 2048 pixels | CMOSIS CMV4000, binned to 512 x 512 resolution (spectral image size) |
VIS Camera | ||
Image size of RGB VIS camera | 1910 x 1270 pixels | Imagery is used for georeference of AaSI data |
FOV | 30º x 19º |
|
Ground pixel size | ~100 m from a 600 km orbit |
|
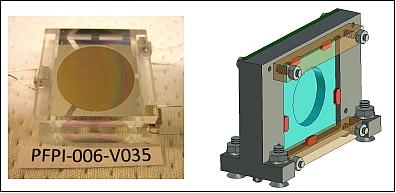
PFPI (Piezo-actuated FPI) module design: The PFPI module is a key component in AaSI, composed of the FPI itself and the surrounding support structure, which also houses the necessary electronics for the piezo-actuation. The FPI mirrors are made with silver coating (thickness 50 nm), on top of which a 50 nm layer of silicon dioxide (SiO2) is deposited as a protective layer. A thin layer of titanium (4 nm) is used as an adhesive to fix all layers together. These mirrors are then fixed (Figure 13) to the piezo actuators with UV-curable adhesive (Dymax OP-61).
The PFPI used in AaSI has already passed space qualification testing and the instrument has passed the critical design review. The construction of the complete qualification model is currently under way and the flight model is expected to be completed during the autumn of 2013. 33)
The source data rate of AaSI is highly dependent on the number of wavelength bands and the image size chosen. As such, the amount of data per picture is widely variable, and can be anything from 2 MB to > 500 MB (max).
The design of the AaSI is such, that the imager is controlled by the OBC (master) via a redundant I2C bus, both for commands and imager housekeeping data, while the imagery is being transmitted via a 3-wire SPI (Serial Peripheral Interface) to the OBC.
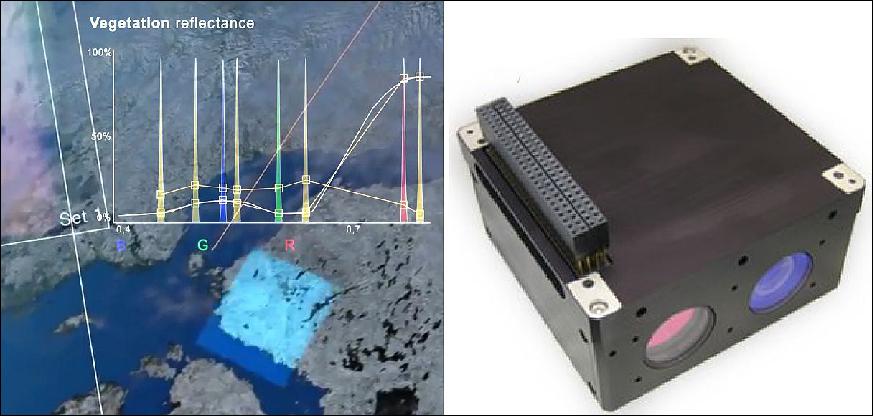
In addition, the AaSI instrumentation includes a separate VIS camera with a FOV of 30º x 19º (parallel accommodation of both instruments and nadir pointing). The objective of the VIS camera is to confirm the location of the AaSI imagery, and to determine whether it is sensible to downlink the high rate data, due to e.g. cloud cover in the target area.
The main functional blocks of AaSI are shown in Figure 15. There are three main parts: The FPI controller, the image sensor memory controller and the main microcontroller which acts as the main interface (I/F) between the OBC and AaSI. AaSI is also directly connected to the EPS (Electrical Power System) of the satellite by two voltage lines +5 V and +12 V.
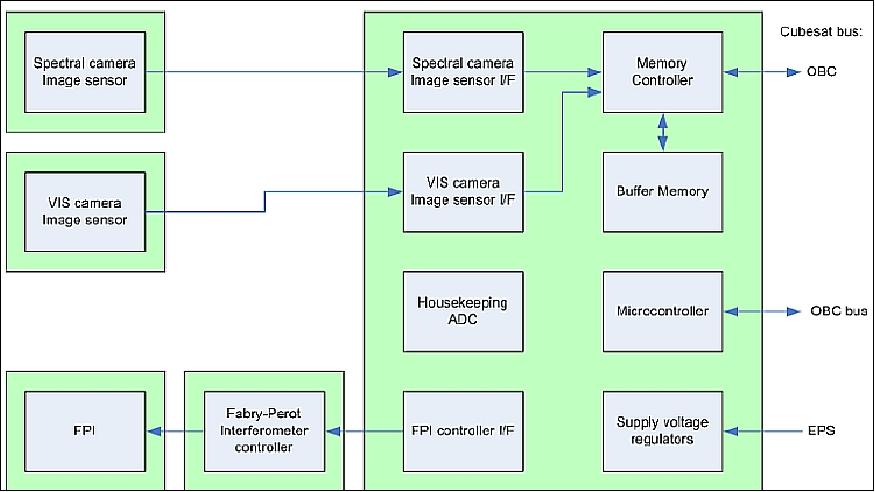
Both image sensors have a global shutter function, so every pixel is exposed simultaneously. The image sensor data is transferred over four LVDS lines to the memory controller FPGA, which moves the data to the buffer memory. In AaSI a 32 MB SDRAM is used as the buffer memory, and it can hold the data of 16 megapixels. The same FPGA will also be used to send the image data to the OBC over and SPI-over-LVDS (Low Voltage Differential Signaling) link. The main microcontroller manages all the communication with the OBC and the synchronisation of FPI and image sensor functions. It will also manage the necessary housekeeping data. The controller is connected to the satellite-wide I2C bus, which is used for command and telemetry transfer. The maximum power consumption is 3 W from the +5 V supply voltage line and 4 W from the +12 V line. The total power consumption depends on the operational mode of AaSI.
In-orbit spectral calibration is planned to be done by using known bright spectral features (e.g. the Sahara desert) and measuring the spectrum around strong absorption peaks (e.g. O2 absorption at 750-760 nm). Also on-board calibration using the 500 and 900 nm filter edges will be possible.
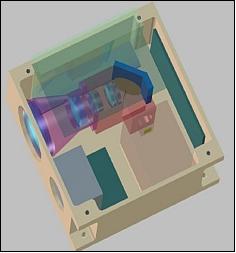
Legend to Figure 16: The larger instrument on top of the box is the AaSI, while the smaller instrument at the bottom is the VIS camera.
The main advantages of the AaSI concept are the small size and the spectral programmability, which provides flexibility and reduced data rate when the application is well defined. A successful space qualification and orbit demonstration will enable development of more advanced instruments based on piezo and MEMS Fabry-Pérot interferometer technologies.
RadMon (Radiation Monitor)
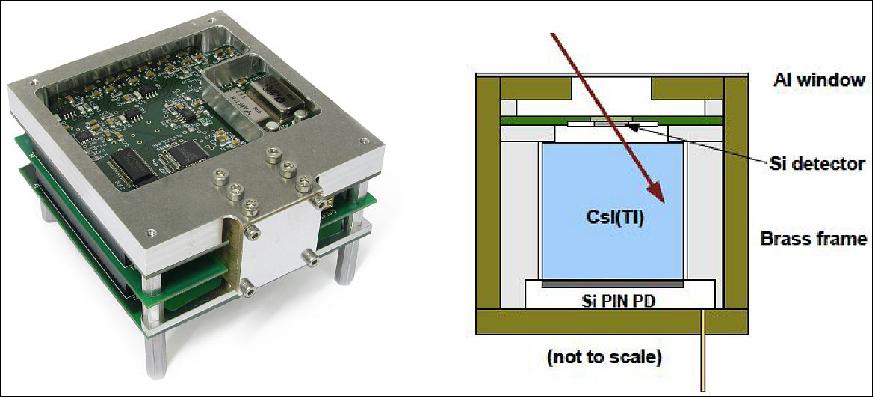
RadMon is a radiation monitor, jointly built by the University of Helsinki (UH) and the University of Turku (UT). The instrument is a miniature spaceborne particle telescope, designed to detect particle (electron and proton) fluxes at the LEO altitude of Aalto-1. RadMon consists of two adjacent detector layers, a thin Si detector to measure the particle energy loss, and a thick CsI (TI) scintillator with a PD (Photodiode) readout to measure the residual energy of the particles stopping in the telescope (Figure 18). The particle energy ranges covered by RadMon are 10-200 MeV [0.7-10 MeV] for protons [electrons]. The measurements consist of particle counting rates (i.e., fluxes) in several energy passbands inside the available energy range (Ref. 4).
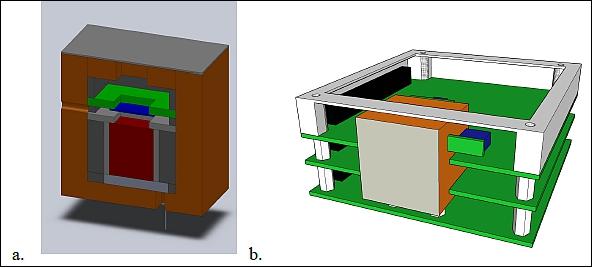
Legend to Figure 18: a) A cut of the RadMon detector unit showing the Si detector (blue chip) and the CsI (TI) scintillator (red cube). Particles enter the system through the 300 µm thick Al window (gray) and a signal from both detectors is required for counting the particle. The housing (brown) is made of brass. b) sketch of the RadMon unit including the stack of three PCBs (analog, digital and power supply, from top down) and the detector unit.
The RadMon design is divided into four subsystems:
• Detector unit
• Analog electronics board for performing the amplification of the detector signals and converting them into digital form
• Digital FPGA-based board for processing of the signals and conversion into the final data product, i.e., electron and proton counting rates in several energy passbands
• PSU (Power Supply Unit).
The instrument utilises the available UART (Universal Asynchronous Receiver/Transmitter) bus for data transfer, commands and telemetry, as well as I2C as a backup. The down-loadable data (both scientific and housekeeping) is estimated to be around 1 MB per 24 hours of operation.
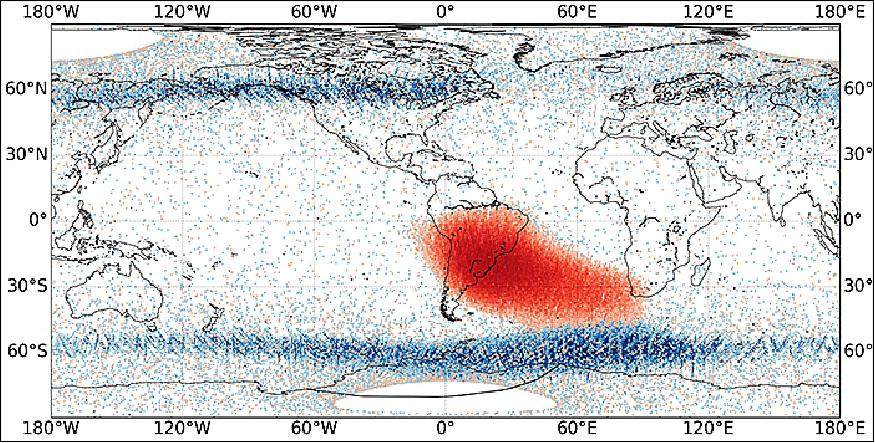
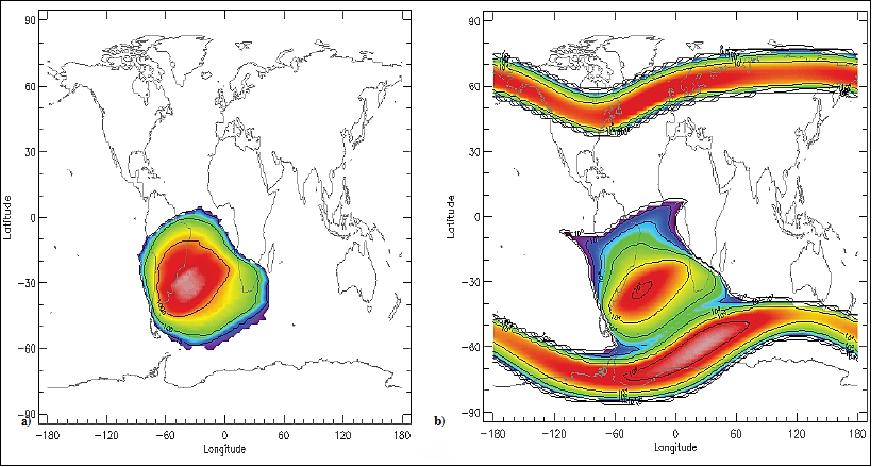
Radiation measurement mission: RadMon will carry out its observations during the first 6 - 12 months of the mission. It will combine the information of the flux with information on time and location to map the flux of energetic particles at LEO and its temporal evolution. The radiation environment consist of cosmic radiation (low intensity background), particles trapped to Earth's magnetic field (van Allen Belts, Figure 24), and solar energetic particle events, which can elevate the fluxes over the polar caps by several orders of magnitude during solar flares and coronal mass ejections. The RadMon measurements will be made freely available to the space science community.
EPB (Electrostatic Plasma Brake)
The electric solar wind sail is a space propulsion method, invented in Finland at FMI (Finnish Meteorological Institute ). 34) The electrostatic plasma brake is a variant of the concept which consists of a single gravity-stabilised tether, intended to deorbit a satellite, to avoid space debris after the mission. The Electric Sail Experiment onboard Aalto-1 is intended to:
• demonstrate the deployment of a conducting thin multiline tether
• measure the electrostatic force exerted on the tether by the ram flow of the ionospheric plasma in different positive and negative tether voltages
• reduce the satellite altitude and so to demonstrate the usefulness of the plasma brake as a satellite deorbiting device.
To measure the expected µN scale electrostatic force, the voltage is turned on always in the same phase of the tether's rotation (e.g. always when the tether is moving towards the ram flow). After several spins, the effect accumulates enough to cause a detectable change in the tether's and satellite's spin rate, from which the force can be calculated. Over a longer timescale, the effect of the force can be deduced from a lowering of the satellite orbit.
EPB is a system, consisting of a 100 m long and 25-50 µm wide tether. As this tether moves with respect to the ionosphere of the LEO spacecraft, it experiences a Coulomb drag force. The tether, itself is composed of several strands, which are arranged in a specific order to minimise the risk of total failure due to strand severing (Ref. 4). 35) 36)
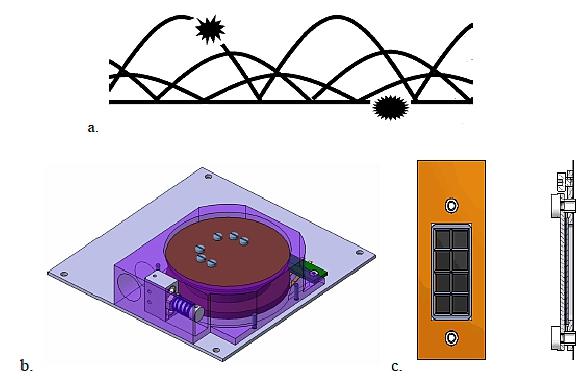
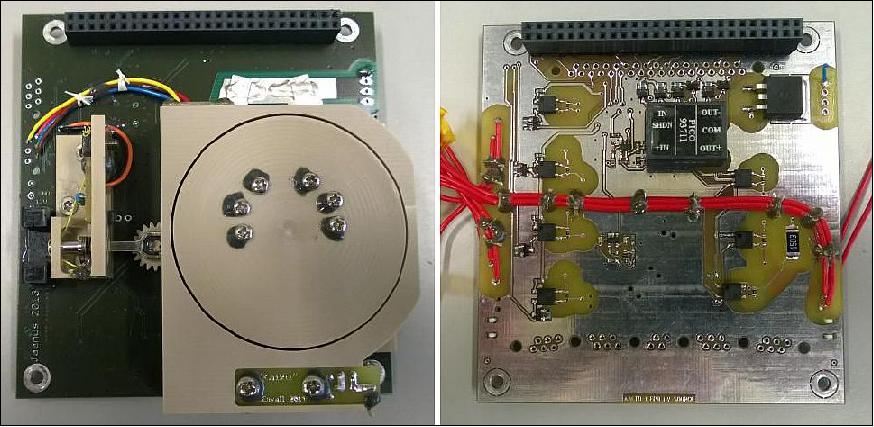
Legend to Figure 20: a) redundant strands ensure a level of tolerance to tearing; b) the tether reel storage shown on a part of the PCB with 53 mm diameter in size; c) an example of the cold cathode electron gun of size of 42 mm x 17.2 mm.
The tether is stored in a reel within the spacecraft (Figure 20 b, and will be reeled out with the help of a motor at a speed of 1-3 mm/s. The tip of the tether includes a small mass (0.5-1 gram) for safe initiation of the deployment.
The tether will be tested in the positively and negatively charged modes in order to estimate how the Coulomb drag will act in both modes, with the negative mode requiring only the satellite's surface to be conducting. The positive mode will require a special miniaturised cold cathode electron gun to complete the circuit (Figure 20 c).
The control of EPB's tether deployment as well as interaction with the rest of the spacecraft systems is handled by a separate control electronics device and a central FPGA. It interfaces via a redundant I2C to the OBC, but actualises only a few functions, and sends a relatively small amount of data (< 10 kB per 24 hours) to the OBC.
After deploying the tether, the Coulomb drag is measured primarily by turning on and off the tether voltage in a synchronous way with the rotation so that, for example, the voltage is on when the tether moves downwind with respect to the plasma ram flow and off when it moves upwind. In this case, the tether's and the satellite's spin increases in each spin period, and the effect accumulates over each spin and yields a large, easily detectable change in the spin rate after a few hours or less. A second, independent way to measure the effect is to look at changes in the satellite orbit.
Critical Mission Phases
Before starting the science phase in which the payloads will perform their targeted science observations, the satellite will go through the commissioning phase (Figure 22, Ref. 11).
The commissioning phase will consist of booting up the satellite, making contact with ground and performing the required technical demonstration for the spectral imager and RADMON. The science phase is divided into two specific parts based on attitude and the downlink communication requirements.
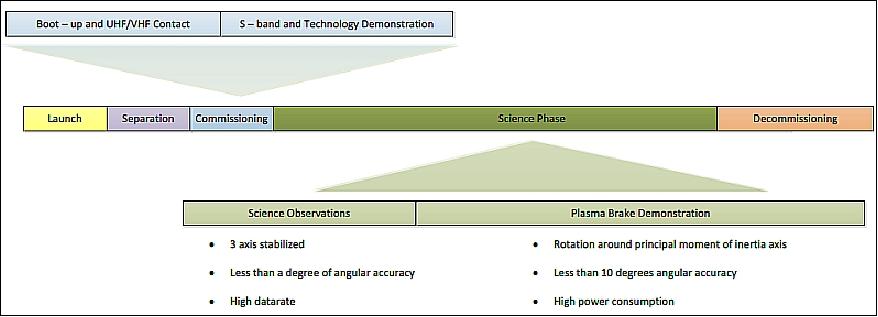
The technology demonstration phase has no time limit. Once the technology demonstration goals have been met and in general the commissioning phase has gone according to plan, the science phase can begin. This phase is divided into two particular phases, as seen in Figure 22, the first of which will consist of science observations performed with the AaSI and the RADMON instruments, and the latter for operating the plasma brake. This division of the science phase is due to the drastically different attitude, data rate and power requirements of the different payloads. The science observations phase is estimated to last 6–12 months, depending on the satellite and the sensor complement performance.
While performing the first part of the science phase, the satellite will assume either a nadir pointing or target tracking attitude and operate the AaSI and the RADMON instruments. Both instruments will rely during this time exclusively on the S-band downlink for transferring their collected data to the ground segment; they are limited by how much data can possibly be downlinked during the contact periods, in particular the imagery of the AaSI instrument. A preliminary estimate gives 29 – 49 MB/day for the S-band for an orbital altitude of 500 – 900 km.
An average image size expected to be taken by the spectral imager is estimated to be around 7.8 MB (512 x512 pixels with 15 channels of 16 bit each), which is for a minimum of 6 months of science observations phase. Thus, the AaSI instrument will take images several times per day, with a typical dynamical power usage profile as shown in Figure 23 of a few minutes duration.

Only a few minutes are needed for the entire observation sequence. The GPS cold-start is by far the longest item in this sequence, the rest requiring only a few seconds per operation block. As the AaSI technology develops further, the power and time requirements will most likely be lower. The power values shown represent the total satellite power during the various operational blocks within the imaging sequence.
RADMON: The RADMON instrument is expected to operate during ~80% of the satellite's orbital period; it is switched off only during station passes (communications) and during an imaging sequence. The RADMON observations have a constant perpendicular angle with respect to the nadir and the satellite's velocity vector directions, the instrument will gather a steady average data rate of ~ 2 MB/day. The main targets of interest are the planet's high latitudes and the SAA (South Atlantic Anomaly) region (Figure 24).
The primary imaging targets are in Finland, both due to accessibility as well as good reference availability. After the AaSI instrument technology has been demonstrated, VTT expects at least one datacube time series to be imaged during the June-August growing season for the science observation phase. In addition, a "dark" image from the night side of the orbit and another one from near the noon-equator will be taken to assess the minimum and maximum lighting conditions of the imager.
EPB (Electrostatic Plasma Brake) demonstration: The plasma brake will be operated in the second part of the science phase, namely the plasma brake demonstration phase. During this phase, the spectral imager will not be used due to drastically different satellite attitude parameters compared to the science observations phase, while the RADMON will be used sporadically and depending on the system's instantaneous power demands.
Event | Average power | Time taken |
1) Satellite assumes a correct sun pointing attitude | 3.2 W | few minutes |
2) Spin-up to 200º/s | 2.6 W | 158 h |
3) Tether reel-out to initial 10 m at 1mm s-1 rate (EstCube-1 CubeSat length) | 5 W | ~4 h |
4) Initial experiment with 10 m of tether deployed in both positive and negative modes (with the radiation monitor on) | 5 W | 1 month |
5) Reeling out the tether to 100m full deployment length | 5 W | ~ 34 h |
6) Actual plasma brake experiment can begin, with the tether this time only in negative mode (with the radiation monitor on) | 5 W | ~ 1 year |
7) Continuing until the satellite has deorbited, once the primary experiment has been completed (optional) | 5 W | ~ 1 year |
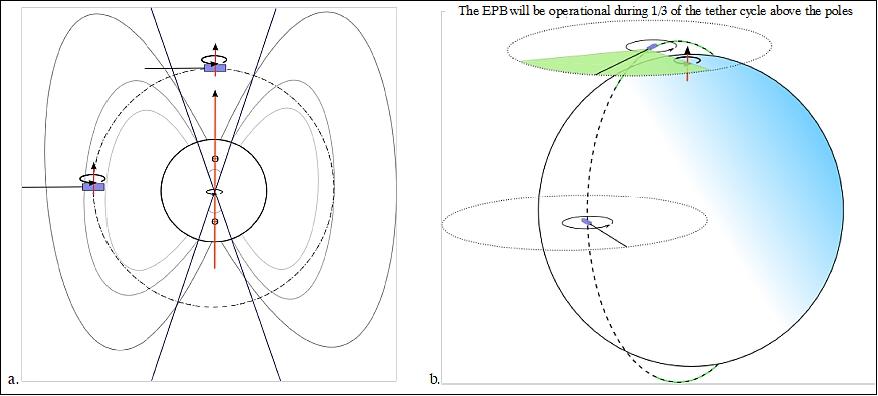
The EPB experiment itself has the goal to demonstrate the technology behind the tether and how well it interacts with the LEO ionosphere around the planet. When moving with respect to the plasma of the ionosphere, it will create a Coulomb drag force due to the charged particles interacting with the equivalently charged tether, with the resulting force vector along the ionosphere velocity vector (Figure 25 a).
As the drag is exerted on the tether and so the rest of the satellite, it will discernibly change its orbit parameters by slowing it down. With regular position and velocity determination, such as GPS, the drag effect created by the ionosphere can, thus, be measured over the period of this last phase, and so the experiment works nominally.
Both positive and negative tether charging modes will be tested during this phase, as described in Table 3, and the negative mode requires only a voltage source and the tether itself, while the positive mode will need additionally 1–3 electron guns to achieve the necessary charge levels in the tether; the tether in this mode gathers electrons from the plasma and shoots them out using the electron gun.
References
1) https://web.archive.org/web/20140419014355/https://wiki.aalto.fi/display/SuomiSAT/Summary
2) Miniature Imaging Spectrometer for Aalto-1 Nanosatellite, 1st IAA Conference on University Satellite Missions and Cubesat Workshop, Rome, Italy, January 24-29, 2011, URL: http://www.vtt.fi/inf/julkaisut/muut/2011/aalto1-Rome_1st_IAA_Cubesat_workshop_Jan2011_nasila-v01.pdf
3) Jaan Praks, Antti Kestilä, Martti Hallikainen, Heikki Saari, Jarkko Antila, Pekka Janhunen, Rami Vainio, "Aalto-1 - an experimental nanosatellite for hyperspectral remote sensing," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Vancouver, Canada, July 24-29, 2011, doi: 10.1109/IGARSS.2011.6050199
4) Antti Kestilä, Tuomas Tikka, Pyry Peitso, Jesperi Rantanen, Antti Näsilä, Kalle Nordling, Jaan Praks , Heikki Saari, Rami Vainio, Pekka Janhunen, Martti Hallikainen, "Science Operations of the Remote Sensing Nanosatellite AALTO-1," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
5) "Aalto-1: the first Finnish nanosatellite," Feb, 5, 2012, URL: http://blogs.aalto.fi/satellite/
6) Jaan Praks, "Nanosatellites and space technology education in Finland," Tartu Conference on Space Science and Technology, Tartu, Estonia, Sept. 22-24, 2014, URL: https://web.archive.org/web/20160304222738/http://tstc2014.to.ee/download/m5429b9e5144f8
7) Tuomas Tikka, "Aalto-1 Nanosatellite (ADCS) End-to-end Testing," 6th European CubeSat Symposium, Estavayer-le-Lac, Switzerland, October 14-16, 2014
8) Jaan Praks, Antti Kestilä, Tuomas Tikka, Nemanja Jovanovic, Bagus Riwanto, Antti Näsilä, Pekka Janhunen, Rami Vainio, "Multi Payload Earth Observation Mission Aalto-1," Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/
16a02_docs/4s2016_final_proceedings.zip?sfvrsn=2
9) "Aalto-1 Finnish Hyperspectral Remote Sensing Nanosatellite: Current Progress," Fourth European CubeSat Symposium, ERM (Ecole Royale Militaire), Brussels, Belgium, Jan.30-Feb. 1, 2012
10) https://wiki.aalto.fi/display/SuomiSAT/Summary
11) A. Kestilä, T. Tikka, P. Peitso, J. Rantanen, A. Näsilä, K. Nordling, H. Saari, R. Vainio, P. Janhunen, J. Praks, M. Hallikainen, "Aalto-1 nanosatellite – technical description and mission objectives," Geoscientific Instrumentation Methods and Data Systems, Vol. 2, 2013, pp. 121-130, URL: http://www.geosci-instrum-method-data-syst.net/2/121/2013/gi-2-121-2013.pdf
12) Tom Segert, Steven Engelen,Bjoern Danziger, Bert Monna, Matthias Buhl, "Preparing the First Flight Model of iADCS - Results of Air Bearing Tests," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
13) Tuomas Tikka, Frank Wedekind, Björn Danziger, Mengu Cho, "Low-cost and Fast-delivery Verification Strategy for the Aalto-1 Nanosatellite Attitude Determination and Control System," 5th Nanosatellite Symposium, November 20-22, 2013, Tokyo, Japan, URL: http://unisec.jp/nanosat_symposium/images/report/pdf/NSS-05-0201.pdf
14) E. Razzaghi, A. Yanes, J. Praks, M. Hallikainen, "Design of a reliable On-Board Computer for Aalto-1 nanosatellite mission," Proceedings of the 2nd IAA Conference on University Satellite Missions and CubeSat Workshop, IAA Book Series , Vol. 2, No 2, Editors: Filippo Graziani, Chantal Cappelletti, Rome, Italy, Feb. 3-9, 2013, paper : IAA-CU-13-08-03
15) Hannu Leppinen, Antti Kestilä, Pauli Pihajoki, Jukka Jokelainen, Touko Haunia, "On‐board Data Handling for Ambitious Nanosatellite Missions using Automotive‐grade Lockstep Microcontrollers," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
16) Jaakko Jussila, "S-band transmitter for Aalto-1 nanosatellite," Thesis submitted for examination for the degree of Master of Science in Technology, Aalto University, School of Electrical Engineering, Espoo, Finland, May 1, 2013, URL: https://aaltodoc.aalto.fi/bitstream/handle/123456789
/10453/master_Jussila_Jaakko_2013.pdf?sequence=1
17) "PSLV-C38 / Cartosat-2 Series Satellite," ISRO, June 23, 2017, URL: http://www.isro.gov.in/launcher/pslv-c38-cartosat-2-series-satellite
18) "Indian Launch Manifest of April 15, 2017," URL: http://www.sworld.com.au/steven/space/india-man.txt
19) "Indian Launch Manifest of April 15, 2017," URL: http://www.sworld.com.au/steven/space/india-man.txt
20) "Indian Launch Manifest of April 15, 2017," URL: http://www.sworld.com.au/steven/space/india-man.txt
21) "Contract signed for Aalto-1 satellite launch," Aalto University, April 9, 2015, URL: http://www.aalto.fi/en/current/news/2015-04-09-002/
22) Andra, "Successful ISILaunch19 campaign," ISILaunch19, June 23, 2017, URL: http://blog.isilaunch.com/successful-isilaunch19-campaign/
23) Dave Williamson, "Small Satellites: The Execution and Launch of a GPS Radio Occultation Instrument in a 6U Nanosatellite," 33rd Space Symposium, Colorado Springs, CO, USA, April 3-6, 2017, URL of presentation: https://www.spacesymposium.org/wp-content/uploads/2017/10/Williamson_Dave_GPS_Radio_Occultation_Talk-v1.pdf
24) "PSLV-C38 / Cartosat-2 Series Satellite Mission: All 31 Satellites separated successfully," ISRO, June 23, 2017, URL: http://www.isro.gov.in/update/23-jun-2017/pslv-c38-
cartosat-2-series-satellite-mission-all-31-satellites-separated
25) "NanoSat hyperspectral camera delivers data after one year of space weather and a solar storm," Space Daily, 02 October 2018, URL: http://www.spacedaily.com/reports/NanoSat_hyper
spectral_camera_delivers_data_after_one
_year_of_space_weather_and_a_solar_storm_999.html
26) "Aalto-1 was launched into space a year ago – the Otaniemi ground station is already being prepared for the launch of the next satellites," Aalto University, 21 June 2018, URL: http://www.aalto.fi/en/current/news/2018-06-21-004/
27) Jaan Praks, Antti Kestilä, Petri Niemelä, Antti Näsilä, Hannu Leppinen, Bagus Riwanto, Tuomas Tikka, Nemanja Jovanovic, Arttu Punkkinen, Nuno Silva, Rami Vainio, Pekka Janhunen, Leo Nyman, Johnny Finnholm, "Aalto-1 nanosatellite mission status and initial observations," Jan. 04, 2018, URL: https://www.researchgate.net/publication/322251443
_Aalto-1_nanosatellite_mission_status_and_initial_observations
28) "Aalto-1 satellite sends first image," Aalto University, 24 July 2017, URL: http://www.aalto.fi/en/current/news/2017-07-24/
29) Anttti Näsilä, "Validation of Aalto-1 Spectral Imager Technology to Space Environment," Thesis submitted for examination for the degree of Master of Science in Technology, Aalto University, School of Electrical Engineering, Espoo May 1, 2013, URL: https://aaltodoc.aalto.fi/bitstream/handle/123456789/
10451/master_N%C3%A4sil%C3%A4_Antti_2013.pdf?sequence=1
30) Antti Näsilä, Heikki Saari, Jarkko Antila, Rami Mannila, Antti Kestilä, Jaan Praks, Heikki Salo, Martti Hallikainen, "Miniature SpectraAalto-1 Spectral Imagerl Imager for the Aalto-1 Nanosatellite," Fourth European CubeSat Symposium, ERM (Ecole Royale Militaire), Brussels, Belgium, Jan.30-Feb. 1, 2012
31) Antti Näsilä, Heikki Saari, Jarkko Antila, Antti Kestilä, Jaan Praks, Martti Hallikainen, "Miniature Imaging Spectrometer for Aalto-1 Nanosatellite," First IAA Conference on University Satellite Missions and Cubesat Workshop, Rome, Italy, Jan. 28,2011, URL: http://www.vtt.fi/inf/julkaisut/muut/2011/aalto1
Rome_1st_IAA_Cubesat_workshop_Jan2011_nasila-v01.pdf
32) "VTT's miniature hyperspectral camera launched to space in Aalto-1 satellite," VTT, June 26, 2017, URL: https://phys.org/news/2017-06-vtt-miniature-hyperspectral-camera-space.html
33) K. Viherkanto, H. Saari, A. Näsilä, "AaSI – Aalto-1 Spectral Imager development status," 5th European CubeSat Symposium, Royal Military Academy, VKI (Von Karman Institute), Brussels, Belgium, June 3-5, 2013
34) P. Janhunen, A. Sandroos, "Simulation study of solar wind push on a charged wire: basis of solar wind electric sail propulsion," Annales Geophysicae, EGU, Vol 25, pp. 755-767, 2007, URL: http://www.electric-sailing.fi/paper2.pdf
35) P. Janhunen, P. K. Toivanen, J. Polkko, S. Merikallio, P. Salminen, E. Haeggström, H. Seppänen, R. Kurppa, J. Ukkonen, S. Kiprich, G. Thornell, H. Kratz, L. Richter, O. Krömer, R. Rosta, M. Noorma, J. Envall, S. Lätt, G. Mengali, A. A. Quarta, H. Koivisto, O. Tarvainen, T. Kalvas, J. Kauppinen, A. Nuottajärvi, A. Obraztsov, "Electric solar wind sail: Toward test missions," Invited Article, Review of Scientific Instruments, Vol. 81, 2010, URL: http://www.electric-sailing.fi/paper9.pdf
36) Osama Khurshid, Pekka Janhunen, Matthias Buhl, Aarto Visala, Jaan Praks, Martti Hallikainen, "Attitude Dynamics Analysis of Aalto-1 Satellite during deorbiting Experiment with plasma brake," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, URL: http://www.electric-sailing.fi/papers/IAC2012-osama.pdf
Spacecraft Launch Mission Status Sensor Complement Mission Phases References Back to Top